diseÑo y construcciÓn de un aeromodelo para … · desarrollo de la agricultura pero la mayora...
TRANSCRIPT

DISEÑO Y CONSTRUCCIÓN DE UN
AEROMODELO PARA LA ADQUISICIÓN
Y TRANSMISIÓN DE DATOS VÍA RF
Jorge Del Carpio Salinas, Luis Alburqueque Guerrero, Enzo Carlos Casasola Medrano, José Alberto Zevallos Luna,
Lidia Quispe Mora, Israel Hinostroza Sáenz, Ronald Montesinos Alvarez

DISEÑO Y CONSTRUCCIÓN
DE UN AEROMODELO PARA
LA ADQUISICIÓN Y TRANSMISIÓN
DE DATOS VÍA RF Primera edición digital
Julio, 2011
Lima - Perú
© Jorge Del Carpio SalinasLuis Alburqueque GuerreroEnzo Carlos Casasola Medrano José Alberto Zevallos LunaLidia Quispe MoraIsrael Hinostroza Sáenz Ronald Montesinos Alvarez
PROYECTO LIBRO DIGITAL
PLD 0155
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú

PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos

de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor

Memorias - XVII CONIMERA
323
I. Introducción
El desarrollo en el procesamiento deimágenes está abarcando muchas áreas delquehacer humano, en particular está ayudando ala agricultura de diversas maneras como estimaráreas de riego de cultivos [1]. La obtención deimágenes satelitales y aéreas no es de fácil accesopara el agricultor mediano y pequeño. Ya se hanpuesto en marcha diversos proyectos sobrevehículos aéreos no tripulados a nivel regional comoColibrí desde el año 2003 de la Universidad EAFITen Colombia [2]. En nuestro país el presenteproyecto es de carácter innovador sin haberserealizado investigación previa de ésta magnitudenfocada a la agricultura.
El presente proyecto comprendió el desarrollode un simulador en computadora del aeromodelopara lo cual se utilizó un modelo matemático nolineal y en realidad virtual 3-D para poder dar mayorrealismo a la actuación y aprendizaje de manejodel aeromodelo, recurriendo a característicasaerodinámicas probadas en túneles de vientofácilmente obtenibles en Internet asi como aecuaciones derivadas de la teoría aerodinámica.Este simulador, además de servir como unaherramienta de aprendizaje de vuelo para que el
personal encargado del manejo de este equipopueda estar mejor familiarizado, nos provee deun modelo matemático, para poder implementarlas estrategias de control adecuadas con mirasa desarrollar la completa autonomía del aeromodeloen una fase posterior del proyecto, para lo cualtambién se incluye la implementación de unsistema de monitoreo en el aeromodelo el cualconsta de un arreglo de sensores para conocerlos parámetros de vuelo principales del aeromodelocomo temperatura, altura, velocidad, posición yángulo de inclinación, con equipos económicos,la obtención de los datos de estos sensores asícomo su calibración se llevan a cabo por unconjunto de microcontroladores. A su vez seimplementó un sistema de adquisición de imágenesy un sistema de transmisión inalámbrica paraenviar los datos obtenidos en el vuelo a unaestación de monitoreo terrestre. En la estación demonitoreo terrestre se implementó otro arreglo desensores para así obtener una mayor precisión.Aquí también se reciben los datos enviados desdeel aeromodelo para posteriormente ser reenviadoshacia la PC, que está encargada de realizar elprocesamiento adecuado de los datos obtenidosasi como su presentación visual para poder apreciarla imagen capturada y las condiciones en las quefue obtenida. La aplicación también está encargada
Diseño y construcción de un aeromodelo para la adquisicióny transmisión de datos vía RF
Jorge Del Carpio Salinas, Luis Alburqueque Guerrero, Enzo Carlos CasasolaMedrano, José Alberto Zevallos Luna, Lidia Quispe Mora, Israel Hinostroza Sáenz,
Ronald Montesinos [email protected]
Facultad de Ingeniería Eléctrica y ElectrónicaUniversidad Nacional de Ingeniería
Av. Tupac Amaru 210 Lima 25 - Perú
Resumen.- Actualmente existen diversas herramientas tecnológicas para eldesarrollo de la agricultura pero la mayoría son inaccesibles para el mediano ypequeño agricultor, como aquellas que se basan en imágenes de terrenos decultivos. El presente proyecto pretende dar una opción económica para laobtención de imágenes aéreas utilizando un vehículo aéreo no tripulado, en dondese implementó un arreglo de sensores y equipos de obtención de imágenes, parala obtención de parámetros principales de vuelo tales como temperatura, altura,posición, velocidad, ángulo de inclinación, entre otros que son presentadosinalámbricamente en un computador personal bajo un entorno visual y que a suvez son almacenados en una base de datos. Además se elaboró un simuladorcon realidad virtual 3-D basado en un modelo matemático no lineal delaeromodelo para así poder tener un mejor aprendizaje y realismo sobre el manejodel mismo.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
324
de guardar estos datos e imágenes en una basede datos de tal manera que puedan ser obtenidosdesde Internet.
2. Planteamiento del problema
Los sistemas de monitoreo aéreo vantomando cada vez más fuerza en camposcercanos a la vida cotidiana, tales como lossistemas de vigilancia o la agricultura. En general,estos se basan en radares, satélites, avionetaso globos aerostáticos. Sin embargo, el precio delalquiler de cualquiera de estos dispositivos no estáal alcance de los agricultores peruanos,privándoseles de esta manera de información muyimportante que a la larga podrían ayudarlos amejorar su productividad y reducir el riesgo deperder su cosecha.
En otros países de América Latina se estácomenzando a aplicar una técnica conocida comoAgricultura de Precisión, que se basa, entre otrascosas, en el procesamiento de fotografías aéreas.Estas fotografías reflejan la evolución de los cultivosy permiten tomar decisiones por adelantado acercade problemas que se podrían presentar a la largay que de otra forma hubiera tomado algunos mesesmás en salir a la luz y por lo tanto demorado másen ser corregidos.
Como podemos observar, en el actualcontexto mundial en donde el Perú esta por firmartratados de libre comercio es necesario darles anuestros agricultores mayores facilidades y se debeencontrar una manera realista de solucionar suscarencias tecnológicas a un precio que vaya deacuerdo con su presupuesto.
3. Propuesta de solución
3.1 Descripción General
Ante la necesidad de implementar un sistemade monitoreo aéreo de bajo costo, se observó unpasatiempo no muy conocido en nuestro país: Elaeromodelismo. Estos pequeños aviones a escalason capaces de volar a velocidades de hasta 90Km/h (los más ligeros) y dependiendo de su diseñopueden llegar a cargar algunos kilogramos.«Si se implementara sensores atmosféricos y unacámara inalámbrica a la cabina de este aeromodelose podría realizar la misma función que la que sehace con una avioneta»
La solución requirió el diseño eimplementación de sensores de presión diferencial,altura, temperatura, ultrasonido, acelerómetros de2 y 3 ejes y un GPS para poder ubicar exactamentela posición y velocidad del avión en tiempo real.Los datos de estos sensores, son enviados a unaestación en tierra, la cual posteriormente losreenvía hacia una PC en donde los datos sonmostrados y almacenados en tiempo real. Ademásde todo esto, se requirió implementar elaeromodelo con una pequeña cámara inalámbrica.Dado que el aprendizaje para volar alguno de estosaeromodelos requiere buen tiempo, se comenzóa desarrollar además un simulador de vuelo,basándonos en las características aerodinámicasdel avión que además de servirnos como una valiosaherramienta de aprendizaje, nos proveerá unmodelo matemático para posteriormenteimplementar un sistema de vuelo autónomo o pilotoautomático.
3.2 Partes del Aeromodelo
El proyecto contiene 4 partes bien definidas.
A. Estación en el Aeromodelo
Se considera estación en el aeromodelo atodo aquello que este volando junto con el avión.Ella contiene 5 sensores analógicos, 1 GPS, 1cámara inalámbrica y los circuitos de transmisión,tanto del aeromodelo, como de los sensoresanalógicos. Además la estación en el aeromodeloestá basada en un microcontrolador PIC16F877el cual es el encargado de la lectura de los datosprovenientes de los sensores y el GPS y suposterior transmisión a tierra. Los sensores conlos que se trabajó fueron:
• Sensor de Presión Diferencial• Sensor de Presión Absoluta• Sensor de Temperatura• Sensor de Ultrasonido• Acelerómetro de 2 ejes• Acelerómetro de 3 ejes
El sensor de presión diferencial, con ayudade un tubo de Pitot, nos permite conocer lavelocidad del aeromodelo con respecto al airesegún la ecuación siguiente que se desprende dela ecuación de Bernoulli.
(ec. 1)

Memorias - XVII CONIMERA
325
Donde:V1: Velocidad del Fluido∆P: Diferencia de Presionesρ : Densidad del Fluido
La ecuación 2 está referida a un modeloestándar de la atmósfera, que raras vecesconcordará con la real, por ello se hace lacorrección de 33.86m por cada ºC adicional dela temperatura prevista por este modelo [8] lo cualdisminuye los errores a poco menos de 10m. Estose consigue iterando varias veces la correcciónde la altura con la temperatura hasta que no hayavariación en dos decimales con respecto a latemperatura propuesta para la altura respectivasegún el modelo estándar.
El sistema de medición de altura porultrasonido puede llegar hasta 15m, para ello seusaron los transductores 400ST16 y 400SR16 quetrabajan a 40KHz, tomándose en cuenta latemperatura ambiental para hacer la corrección dela velocidad del sonido el cual influye en lamedición.
El acelerómetro de dos ejes fueimplementado para el análisis de los choques yperturbaciones fuertes en el movimiento delaeromodelo. El acelerómetro usado es elMMA3201D de Motorola. El acelerómetro de tresejes es implementado para poder obtener lainclinación del aeromodelo, para lo cual se estáusando el acelerómetro MMA7260Q de Motorola,seleccionado en el rango de ±1.5g.
Figura 1. Tubo de Pitot confeccionado
Para ello se usó el sensor de presióndiferencial MPX5010DP acondicionado conamplificadores operacionales para su comunicacióncon el microcontrolador. Se confeccionó ademásun tubo de Pitot modificado, tal como se muestraen la Figura 1. Las pruebas de funcionamiento serealizaron sobre un automóvil a velocidades altas.
Tabla 1 Comparación de Valores Experimentalesy Teóricos para el Tubo de Pitot
El sensor de presión absoluta, en este casoMPX4100A, nos permite conocer la altura enmetros del aeromodelo de acuerdo a la ecuación(ec. 2). Sin embargo la temperatura del ambientehace variar dramáticamente las mediciones, motivopor el cual se hace necesaria la implementaciónde sensores de temperatura, actualmente LM335,para su corrección.
256.56
0
)10557.221( hxp
p −−= (ec. 2)
Donde:p : Velocidad del Fluidop
0: Diferencia de Presiones
h : Altura
Figura 2. Sup. Izquierda: Acelerómetro de 2 ejes.Sup. Derecha: Acelerómetro de 3 ejes. Inf.Izquierda: Sensor de presión absoluta. Inf.
Derecha. Sensores de ultrasonido
Para poder determinar la posición delaeromodelo en tiempo real, se está usando elreceptor de GPS Garmin, modelo eTrex el cualpuede trabajar hasta con 12 satélites. Usa elprotocolo NMEA v3.0. Se obtienen la latitud,longitud, hora, hecha, velocidad con respecto ala tierra y altitud geodésica.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
326
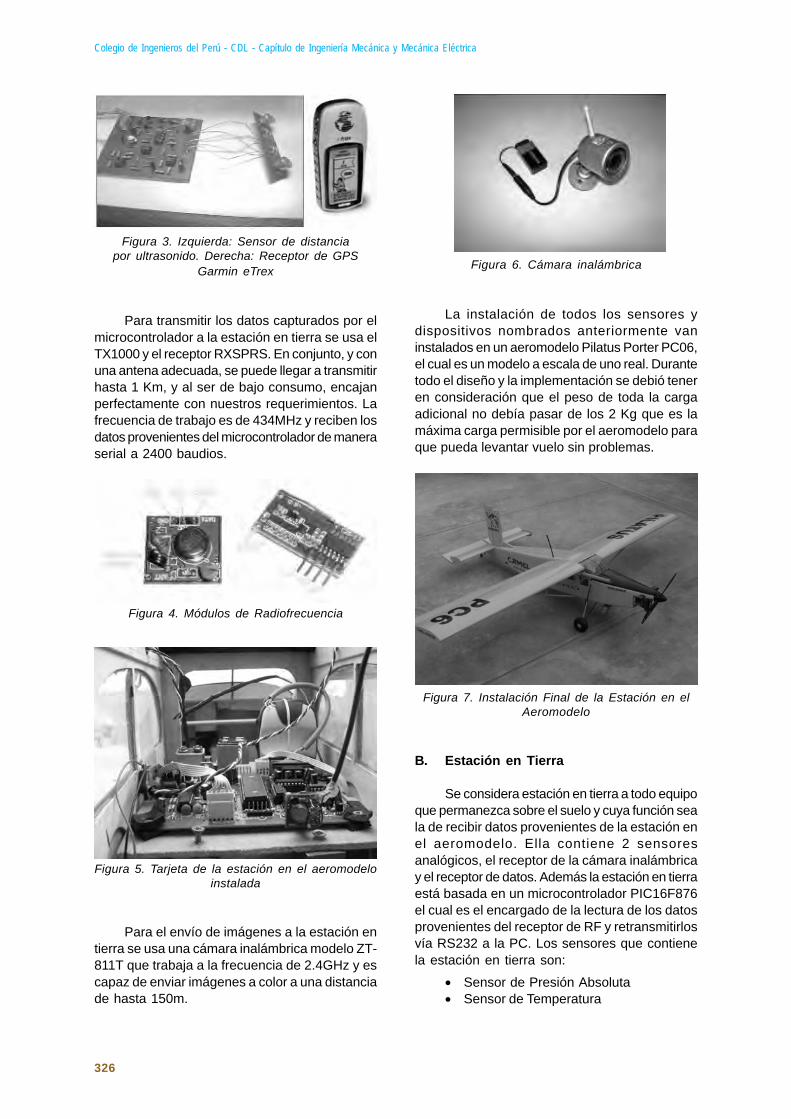
Figura 3. Izquierda: Sensor de distanciapor ultrasonido. Derecha: Receptor de GPS
Garmin eTrex
Para transmitir los datos capturados por elmicrocontrolador a la estación en tierra se usa elTX1000 y el receptor RXSPRS. En conjunto, y conuna antena adecuada, se puede llegar a transmitirhasta 1 Km, y al ser de bajo consumo, encajanperfectamente con nuestros requerimientos. Lafrecuencia de trabajo es de 434MHz y reciben losdatos provenientes del microcontrolador de maneraserial a 2400 baudios.
Figura 6. Cámara inalámbrica
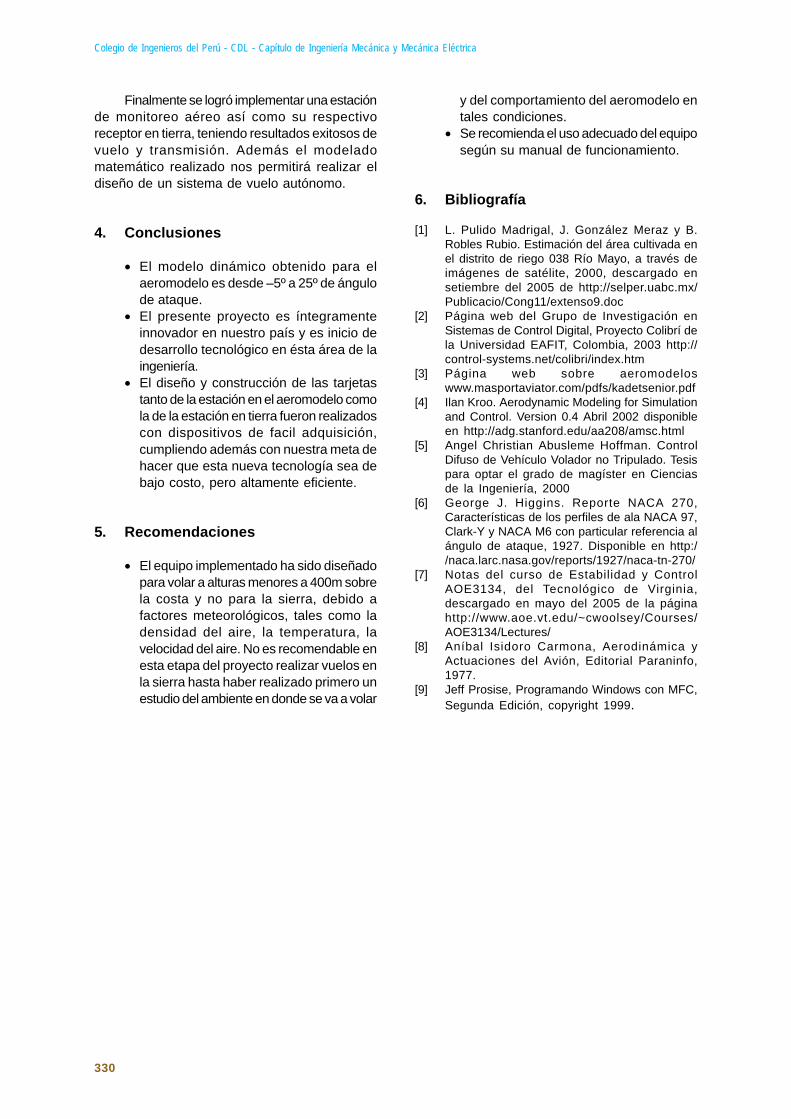
La instalación de todos los sensores ydispositivos nombrados anteriormente vaninstalados en un aeromodelo Pilatus Porter PC06,el cual es un modelo a escala de uno real. Durantetodo el diseño y la implementación se debió teneren consideración que el peso de toda la cargaadicional no debía pasar de los 2 Kg que es lamáxima carga permisible por el aeromodelo paraque pueda levantar vuelo sin problemas.
Figura 4. Módulos de Radiofrecuencia
Figura 5. Tarjeta de la estación en el aeromodeloinstalada
Para el envío de imágenes a la estación entierra se usa una cámara inalámbrica modelo ZT-811T que trabaja a la frecuencia de 2.4GHz y escapaz de enviar imágenes a color a una distanciade hasta 150m.
Figura 7. Instalación Final de la Estación en elAeromodelo
B. Estación en Tierra
Se considera estación en tierra a todo equipoque permanezca sobre el suelo y cuya función seala de recibir datos provenientes de la estación enel aeromodelo. Ella contiene 2 sensoresanalógicos, el receptor de la cámara inalámbricay el receptor de datos. Además la estación en tierraestá basada en un microcontrolador PIC16F876el cual es el encargado de la lectura de los datosprovenientes del receptor de RF y retransmitirlosvía RS232 a la PC. Los sensores que contienela estación en tierra son:
• Sensor de Presión Absoluta• Sensor de Temperatura

Memorias - XVII CONIMERA
327
La desviación de los instrumentos analógicosutilizados es fuerte, por lo cual se optó por usardos sensores de presión uno para la estación demonitoreo terrestre y otro para el aeromodelo [5]con sus respectivos sensores de temperatura parahacer las correcciones. El proceso de cálculo dealtura se hará al restar las mediciones provenientesde ambos sensores.
El programa de la estación en el aeromodelocontiene un algoritmo de detección de error, el cualconsiste en ir comparando lo recibido con un patrónpreviamente establecido al comienzo de latransmisión. Si los patrones coinciden, se procedea reenviar los datos a la PC. En caso contrario,se espera a la siguiente recepción.
Figura 9. Estación en Tierra
C. Simulador de Vuelo
El modelo matemático actualmentecontempla tres grados de libertad, es decirdesplazamiento vertical y horizontal conmovimiento angular vertical. Inicialmente se estámodelando el aeromodelo de entrenamiento KadetSenior que es uno de los más preferidos por losprincipiantes por su gran estabilidad de giro y porsu vuelo lento [3]. Se está considerando elsiguiente sistema de ecuaciones [4,5]:
∑∑∑
=
+=
+−=
YYY
Z
X
MI
Q
Fm
UQW
Fm
WQU
1
1
1
�
�
�
(ec. 3)
Figura 7. Tarjeta de la Estación en elAeromodelo
El receptor de vídeo trabaja de maneraindependiente al receptor de datos, y se conectarádirectamente a la PC a través de una sintonizadorade TV.
Figura 8. Receptor de video instalado
A continuación se muestra la estación entierra completamente operativa y funcionando.
Figura 10. Sistema de referencia
Donde U es la componente horizontal de lavelocidad del aeromodelo, W la componente verticalde la velocidad del aeromodelo y Q la velocidadangular o velocidad de cabeceo del aeromodelo,

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
328
F las fuerzas incluidas, I el momento de inerciacon respecto al eje Y y M los momentos queafectan al aeromodelo en el eje Y. Además se estáconsiderando un modelo poco simple de la fuerzade propulsión (motor de dos tiempos) de acuerdoa [5]:
TTTvVCTT δ)( 0 += (ec. 4)
La fuerza producida por el motor depende dela velocidad de desplazamiento, a mayor velocidadmenor fuerza de propulsión, esto significa que elcoeficiente C
Tv es negativo, este coeficiente se
puede calcular fácilmente midiendo la máximavelocidad de desplazamiento que consigue esteaeromodelo (aprox. 25m/s), el parámetro δ
T es el
que simula el ciclo de trabajo del motor y elparámetro T
0 es la fuerza máxima de propulsión
la cual se da cuando la velocidad es mínima.La fuerza de sustentación, arrastre y el momentoinherente del ala depende de la forma del perfilde ala y del tipo de cola a usar, en el caso delKadet Senior el perfil de ala es el Clark-Y.
ttLttLw SV
CSV
CL2
)(2
)(22 ραηρα += (ec. 5)
ttDttDw SV
CSV
CD2
)(2
)(22 ραηρα += (ec. 6)
Se están tomando los valores obtenidos detúneles de viento [5,6] para el coeficiente desustentación C
Lw, arrastre C
Dw y de momentos del
ala, para el coeficiente de sustentación y demomentos se están modelando los coeficientescon redes neuronales de base radial de dos capasy para el coeficiente de arrastre se usa unaecuación cuadrática (ec. 7):
01637.01538.01021.1)( 2 ++= αααDwC (ec. 7)
Para el caso de los momentos se estánconsiderando los siguientes:
θα ��MMMMMM ftwA ++++= (ec. 8)
Donde Mw, M
t y M
f son los momentos
provocados por el ala, la cola y el fuselaje(normalmente despreciable) y α�M y θ�M son losmomentos provocados por todas las fuerzas debidoal cambio en el ángulo de ataque y de cabeceoo «pitch», respectivamente, los cuales son muyimportantes. Para el caso de los momentos delala y de la cola podemos asumir sin mucho error[5,7]:
wLwMacw xSV
CcSV
CM2
)(2
)(22 ραρα += (ec. 9)
tt
tLttt xSV
CM2
)(2ραη= (ec. 10)
Donde CMac
es el coeficiente de momentosrespecto al centro aerodinámico y normalizado paraser usado con brazo de momento de longitud lacuerda media, este momento es dependiente delángulo de ataque y siempre se produce por eldesplazamiento del ala en el medio, estecoeficiente no es lineal y también se debe obtenerde pruebas en túneles de viento donde nosotroslo modelamos con redes neuronales de base radial,el segundo componente de la suma de la ecuacióncorresponde al momento provocado por la fuerzade sustentación, como se indicó anteriormentedespreciamos los momentos debido al arrastre.x
w es el brazo del momento del ala al centro de
gravedad del aeromodelo, xt es el brazo del
momento de la cola al centro de gravedad delaeromodelo.
Figura 11 Visualización de la RegresiónObtenida con Redes Neuronales de los datos delTúnel de Viento para el Coeficiente de Momentos
A todo esto también se está considerandoel ángulo de downwash que afecta al ángulo deataque de la cola:
eLweLwet CC δτααδτεαδαα ⋅+−−=⋅+−= 25.0)(25.5)(),(
(ec. 11)
La ecuación está expresada en gradossexagesimales, donde ε es ángulo de downwashque como se ve en la ecuación es dependientedel ángulo de ataque del ala, α es el ángulo deataque del ala, τ es la efectividad del elevador yδ
e es el ángulo de deflexión del elevador.
La implementación actual está en Simulinkde Matlab con el Toolbox de Realidad Virtual yel mundo virtual fue hecho en VRML(Virtual Reality

Memorias - XVII CONIMERA
329
Modelling Language) tanto la apariencia delaeromodelo como el paisaje creado.
Para el manejo del aeromodelo seimplementó una pantalla pequeña en la que cadadimensión representa una variable de control, elángulo de deflexión del elevador y el ciclo de trabajodel motor. Para poder controlar estos parámetrosbasta con presionar sobre la pequeña pantalla yarrastrar el puntero hasta los parámetrosdeseados.
Figura 12. Imagen del Aeromodelo con lapantalla de control
Figura 13. Bloque de Coeficientes Aerodinámicosen Simulink
D. Interfaz de Visualización y Base de Datos
La aplicación se basa en tecnologías de bajocosto de desarrollo y mantenimiento. Es por esoque la Base de Datos está desarrollada en MySQL5.0, que es una de las mas utilizadas por surendimiento además de ser open source, licenciaGPL, de distribución gratuita, lo que reduce loscostos en el desarrollo de aplicaciones. Los datos
recolectados son mostrados por medio de unaaplicación desarrollada en Visual .Net C++ conla ayuda de las librerías MFC y API[9], estaaplicación recibe los datos por el puerto serial yse realiza la corrección de errores que requierande procesamiento de datos considerables, comocorrección de velocidad del sonido por temperaturapara el sistema de ultrasonido, la corrección dela altura por temperatura para el sensor de presiónabsoluta, para su posterior visualización yalmacenamiento en la base de datos.
3.3 Resultados
Medición de temperatura con tres decimales,de velocidad con respecto al viento con tubo depitot hasta 33m/s, de altura por presión atmosféricahasta 400m.s.n.m., de distancia por ultrasonidohasta 15m., de ángulos de inclinación con elacelerómetro de tres ejes a sensibilidad de 800mV/g, de impactos con los acelerómetros de dos ejescon rango de ±40g. El sistema de transmisión dedatos implementado alcanza una distancia de 200mcon línea de vista, sin embargo con la inclusiónde antenas de alta ganancia se podrá alcanzaruna distancia de 1Km. El sistema de transmisiónde imágenes consigue una distancia de 150 metroscon línea de vista.
Desarrollo del simulador para el aeromodelocon tres grados de libertad, modelado decoeficientes aerodinámicos con redes neuronalesde base radial válido hasta 25º de ángulo deataque, en Matlab y el toolbox de Realidad Virtual.
El diseño e implementación de Base deDatos Aviónica está hecho en MySQL y laimplementación de la interfaz de visualización enVisual C++ .NET.
Figura 14. Prueba Final de Vuelo delAeromodelo con todos los sensores instalados.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
330
Finalmente se logró implementar una estaciónde monitoreo aéreo así como su respectivoreceptor en tierra, teniendo resultados exitosos devuelo y transmisión. Además el modeladomatemático realizado nos permitirá realizar eldiseño de un sistema de vuelo autónomo.
4. Conclusiones
• El modelo dinámico obtenido para elaeromodelo es desde –5º a 25º de ángulode ataque.
• El presente proyecto es íntegramenteinnovador en nuestro país y es inicio dedesarrollo tecnológico en ésta área de laingeniería.
• El diseño y construcción de las tarjetastanto de la estación en el aeromodelo comola de la estación en tierra fueron realizadoscon dispositivos de facil adquisición,cumpliendo además con nuestra meta dehacer que esta nueva tecnología sea debajo costo, pero altamente eficiente.
5. Recomendaciones
• El equipo implementado ha sido diseñadopara volar a alturas menores a 400m sobrela costa y no para la sierra, debido afactores meteorológicos, tales como ladensidad del aire, la temperatura, lavelocidad del aire. No es recomendable enesta etapa del proyecto realizar vuelos enla sierra hasta haber realizado primero unestudio del ambiente en donde se va a volar
y del comportamiento del aeromodelo entales condiciones.
• Se recomienda el uso adecuado del equiposegún su manual de funcionamiento.
6. Bibliografía
[1] L. Pulido Madrigal, J. González Meraz y B.Robles Rubio. Estimación del área cultivada enel distrito de riego 038 Río Mayo, a través deimágenes de satélite, 2000, descargado ensetiembre del 2005 de http://selper.uabc.mx/Publicacio/Cong11/extenso9.doc
[2] Página web del Grupo de Investigación enSistemas de Control Digital, Proyecto Colibrí dela Universidad EAFIT, Colombia, 2003 http://control-systems.net/colibri/index.htm
[3] Página web sobre aeromodeloswww.masportaviator.com/pdfs/kadetsenior.pdf
[4] Ilan Kroo. Aerodynamic Modeling for Simulationand Control. Version 0.4 Abril 2002 disponibleen http://adg.stanford.edu/aa208/amsc.html
[5] Angel Christian Abusleme Hoffman. ControlDifuso de Vehículo Volador no Tripulado. Tesispara optar el grado de magíster en Cienciasde la Ingeniería, 2000
[6] George J. Higgins. Reporte NACA 270,Características de los perfiles de ala NACA 97,Clark-Y y NACA M6 con particular referencia alángulo de ataque, 1927. Disponible en http://naca.larc.nasa.gov/reports/1927/naca-tn-270/
[7] Notas del curso de Estabilidad y ControlAOE3134, del Tecnológico de Virginia,descargado en mayo del 2005 de la páginahttp://www.aoe.vt.edu/~cwoolsey/Courses/AOE3134/Lectures/
[8] Aníbal Isidoro Carmona, Aerodinámica yActuaciones del Avión, Editorial Paraninfo,1977.
[9] Jeff Prosise, Programando Windows con MFC,Segunda Edición, copyright 1999.
