diseÑo e implementaciÓn de un mando de control para un...
TRANSCRIPT

DISEÑO E IMPLEMENTACIÓN DE UN MANDO DE CONTROL PARA UN
VEHÍCULO TELEOPERADO
DIANA LUCIA PUENTES GAITÁN SERGIO ALEJANDRO RÍOS BONILLA
DIEGO SALVADOR RAMÍREZ
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA INGENIERÍA ELECTRÓNICA
BOGOTÁ 2010

DISEÑO E IMPLEMENTACIÓN DE UN MANDO DE CONTROL PARA UN
VEHÍCULO TELEOPERADO
DIANA LUCIA PUENTES GAITÁN SERGIO ALEJANDRO RÍOS BONILLA
DIEGO SALVADOR RAMÍREZ
Trabajo de grado
Asesor: Néstor Penagos Ingeniero Electrónico
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA INGENIERÍA ELECTRÓNICA
BOGOTÁ 2010

CONTENIDO
Pág.
INTRODUCCIÓN 14
1. PLANTEAMIENTO DEL PROBLEMA 15
1.1 ANTECEDENTES 15
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA 26
1.3 JUSTIFICACIÓN 27
1.4 OBJETIVOS DE LA INVESTIGACIÓN 27
1.4.1 Objetivo general 27
1.4.2 Objetivos específicos 28
1.5 ALCANCES Y LIMITACIONES DEL PROYECTO 28
2. METODOLOGÍA 29
3. LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD 30
/ CAMPO TEMÁTICO DEL PROGRAMA
4. DESARROLLO INGENIERIL 31
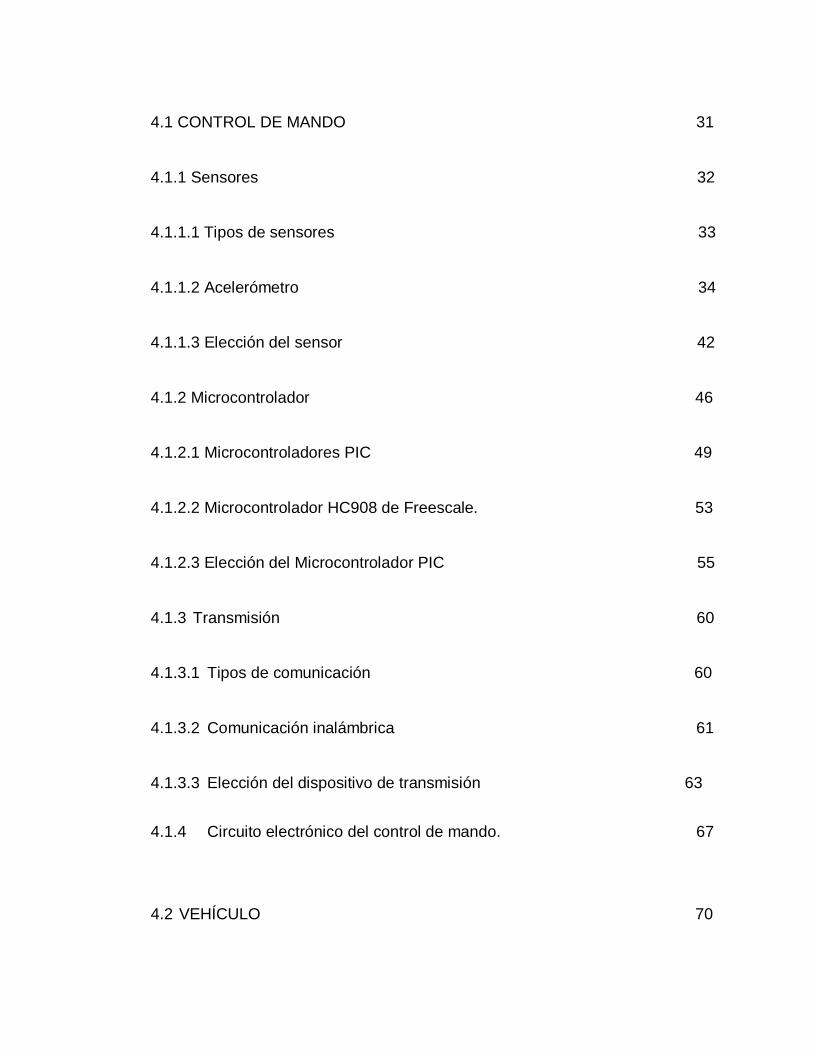
4.1 CONTROL DE MANDO 31
4.1.1 Sensores 32
4.1.1.1 Tipos de sensores 33
4.1.1.2 Acelerómetro 34
4.1.1.3 Elección del sensor 42
4.1.2 Microcontrolador 46
4.1.2.1 Microcontroladores PIC 49
4.1.2.2 Microcontrolador HC908 de Freescale. 53
4.1.2.3 Elección del Microcontrolador PIC 55
4.1.3 Transmisión 60
4.1.3.1 Tipos de comunicación 60
4.1.3.2 Comunicación inalámbrica 61
4.1.3.3 Elección del dispositivo de transmisión 63
4.1.4 Circuito electrónico del control de mando. 67
4.2 VEHÍCULO 70

4.2.1 Recepción 70
4.2.2 Control 72
4.2.3 Actuadores 73
4.2.4 Circuito electrónico del vehículo 78
5. DESCRIPCIÓN Y ANÁLISIS DE RESULTADOS 83
6. CONCLUSIONES 86
7. RECOMENDACIONES 87
BIBLIOGRAFÍA 88
LISTA DE TABLAS
Pág.
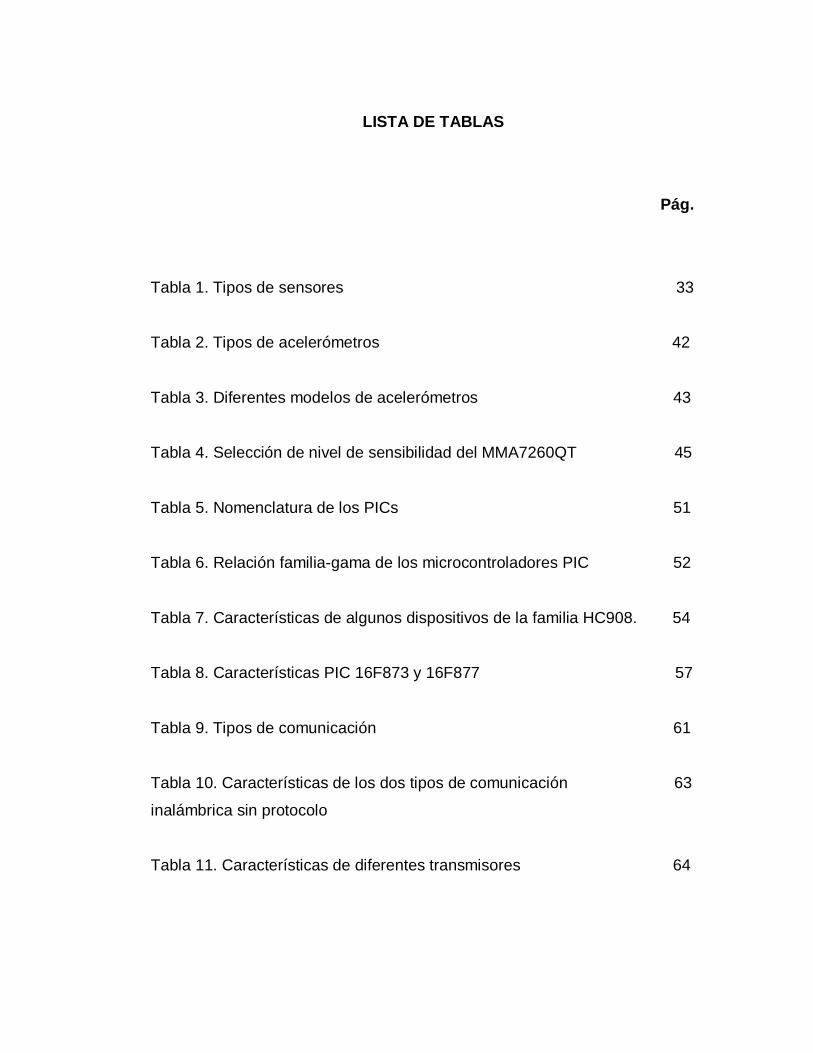
Tabla 1. Tipos de sensores 33
Tabla 2. Tipos de acelerómetros 42
Tabla 3. Diferentes modelos de acelerómetros 43
Tabla 4. Selección de nivel de sensibilidad del MMA7260QT 45
Tabla 5. Nomenclatura de los PICs 51
Tabla 6. Relación familia-gama de los microcontroladores PIC 52
Tabla 7. Características de algunos dispositivos de la familia HC908. 54
Tabla 8. Características PIC 16F873 y 16F877 57
Tabla 9. Tipos de comunicación 61
Tabla 10. Características de los dos tipos de comunicación 63
inalámbrica sin protocolo
Tabla 11. Características de diferentes transmisores 64

LISTA DE FIGURAS
Pág.
Figura 1. Comet III 16
Figura 2. S-PC 17
Figura3. Vehículo manejado vía radio 17
Figura 4. Vehículos desarrollados 18
Figura 5. Sojourner Rover 19
Figura 6. Partes del Sojourner Rover 19
Figura 7. Acelerómetro en teléfonos móviles 21
Figura 8. Juegos con acelerómetros 21
Figura 9. Combinación GPS y acelerómetro 22
Figura 10. Acelerómetro en el Nintendo Wii 23
Figura 11. Acceleglove 24
Figura 12. Acceleglove en uso 24
Figura 13. Componentes del Segway 25

Figura 14. Segway 26
Figura 15. Diagrama en bloques del sistema 31
Figura 16. Diagrama en bloques del control de mando 32
Figura 17. Principio Fundamental de un acelerómetro 35
Figura 18. Esquema de un Acelerómetro Mecánico 36
Figura 19. Acelerómetro piezoeléctrico 37
Figura 20. Acelerómetro piezoresistivo 38
Figura 21. Esquema interno de un acelerómetro capacitivo 39
Figura 22. Capacitancias iguales Ca = Cb 40
Figura 23. Variación en las capacitancias 40
Figura 24. Acelerómetros MEMS 41
Figura 25. MMA7260QT vista desde abajo 44
Figura 26. MMA7260QT vista desde arriba con distribución de pines 45
Figura 27. Acelerómetro MMA7260QT Seleccionado 46
Figura 28. Diagrama de bloques de un Microcontrolador 47

Figura 29. Arquitecturas (a) von Neumann y (b) Harvard 49
Figura 30. Oscilador de cristal 50
Figura 31. Oscilador RC 51
Figura 32. Microcontrolador HC908. 53
Figura 33. Arquitectura de ejecución CPU08. 54
Figura 34.Diagrama de pines del PIC16F873 (encapsulado de 28 pines) 56
Figura 35. Diagrama de pines del PIC16F877 (encapsulado de 40 pines) 56
Figura 36. Diagrama de bloques general de los PIC de gama media 58
Figura 37. Descripción del Pinout del PIC16F873 y PIC16F876 59
Figura 38. Comunicación por infrarrojo 62
Figura 39. TLP 434A Transmisor 64
Figura 40. Modulación ASK 65
Figura 41. Circuito para conexión TLP434A 66
Figura 42. Diagrama del circuito del control remoto 67
Figura 43. Diagrama de flujo del programa del microcontrolador 69
para la transmisión

Figura 44. Diagrama de flujo de los componentes instalados en el 70
vehículo
Figura 45. RLP 434 Receptor 71
Figura 46. Circuito de aplicación del RLP343 72
Figura 47. Rotor 74
Figura 48. Estator 75
Figura 49. Componentes del motor DC 75
Figura 50. Movimientos de un motor DC 76
Figura 51.Modulacion de ancho de pulso PWM 77
Figura 52. Puente H de control del motor 78
Figura 53. Diagrama circuital del vehículo (microcontrolador, 79
decodificador y receptor)
Figura 54. Diagrama circuital del vehículo (Puente H, 80
optoacopladores y motor)
Figura 55. Diagrama de flujo del programa del microcontrolador 82
para la recepción
Figura 56. Esquema general y pines de la LCM08002B 84

Figura 57. Fotografía del vehículo y control de mando 85

LISTA DE ANEXOS
Pág.
Anexo A. Especificaciones técnica de los dispositivos 92
Anexo B. Líneas de código 123
Anexo C. Tarjetas y montajes 152

14
INTRODUCCIÓN
A través de la historia el hombre ha desarrollado diferentes formas de simplificar
sus tareas cotidianas, utilizando gran variedad de mecanismos que se han ido
desarrollando con el tiempo. Los vehículos motorizados son una muestra del
ingenio del hombre en su afán de mejorar su calidad de vida; actualmente estos
vehículos están involucrados en casi todas las labores y actividades que el
hombre realiza diariamente. Existen vehículos que sirven para transporte de
personas, carga pesada y hasta para diversión de niños y adultos como lo son los
vehículos teleoperados.
Los vehículos operados a distancia son aquellos que son controlados por un
usuario desde una estación remota. Fueron creados principalmente para el
entretenimiento de niños, pero al ver la utilidad de estos vehículos en diferentes
actividades, llegaron a ser utilizados en la realización de tareas difíciles y
peligrosas para el hombre. Los vehículos exploradores fueron diseñados
principalmente para proteger la vida humana; la idea principal consiste en usarlos
en lugares que tengan algún tipo de riesgo o poca accesibilidad para un humano,
con fines de rescate o prevención, ya que en dichos vehículos se pueden incluir
varios dispositivos como por ejemplo: cámaras, sensores de temperatura,
sensores que detecten metales, entre otros.
15
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES Como se menciona en el artículo Móviles o vehículos robot1, los vehículos
robotizados están basados en carros o plataformas y formados por un sistema
automotor de tipo rodante. En los años cincuenta fueron diseñadas las tortugas
motorizadas que sirvieron como base para estudios de inteligencia artificial, que
comenzaron a ser desarrollados entre los años de 1965 y 1973 en la universidad
de Stamford.
En la actualidad existen diferentes tipos de vehículos no tripulados; estos están
categorizados dependiendo de la tarea para la cual han sido diseñados. Por
ejemplo: por el medio en el cual se ejecutara su tarea, la forma cómo se
movilizará, entre otras características. Existen vehículos militares no tripulados
que tienen entre sus funciones, explorar campos minados y lugares peligrosos
para el ser humano; estos vehículos cuentan con un blindaje especial que lo
protege de explosiones o posibles ataques. Un ejemplo de este tipo de vehículo
puede verse en el artículo “Japoneses diseñan robots para salvar vidas2”, es el
Comet III, un vehículo con forma de araña metálica (ver figura 1), el cual podría
rastrear minas anti personales o sobrevivientes entre escombros. Su creador
kenzo Nonani afirma que “Mi convicción es que la gente no tendría que hacer
trabajos peligrosos”, por esta causa invierte su tiempo creando robots para
actividades de rescate o con fines humanitarios.
1 Móviles o vehículos robot. En: HISTORIA DEL ARTE DE LA ROBÓTICA [en línea]. 1 abril 2009. Disponible en Web: < http://robotik-jjlg.blogspot.com/2009/04/moviles-o-vehiculos-robot.html>. 2 Japoneses diseñan robots para salvar vidas. En: PARITARIOS [en línea]. Chile. Disponible en Web: < http://www.paritarios.cl/ciencia_robot_salva%20_vidas.htm>.

16
Actualmente existen empresas que realizan proyectos de investigación sobre
vehículos teleoperados como por ejemplo S-PC3 (Sistemas de Percepción y
Control S.L.), que ha desarrollado vehículos para aplicación en vigilancia o en
inspección de zonas con algún tipo de riesgo (Figura 2). Esta empresa también ha
diseñado y construido vehículos que alcanzan grandes velocidades piloteados vía
radio (Figura 3 y 4).
Figura 1. Comet III
Fuente: http://www.paritarios.cl/ciencia_robot_salva%20_vidas.html
3 Vehículos teleoperados. En: Sistemas de percepción y control [en línea]. España. Disponible en Web: < http://www.s-pc.com/productos_vehiculos.html>.

17
Figura 2. S-PC
Fuente: http://www.s-pc.com/productos_vehiculos.html
Figura 3. Vehículo manejado vía radio
Fuente: http://www.s-pc.com/productos_vehiculos.html

18
Figura 4. Vehículos desarrollados
Fuente: http://www.s-pc.com/productos_vehiculos.html
También se puede destacar el proyecto llamado Sojourner Rover4 (Figura 5 y 6),
que consiste en un pequeño vehículo robotizado de seis ruedas, construido por el
JET PROPULSIÓN LABORATORY de la nasa, diseñado para ser enviado a Marte
dentro del Mars Pathfinder (Misión enviada a Marte en 1996) , con capacidad de
transmitir imágenes y realizar experimentos en el suelo de Marte. Las medidas del
ROVER son: 65 centímetros de largo, 48 cm de ancho, y 30 cm de altura. El
sistema de alimentación del ROVER está compuesto de un arreglo de paneles
solares y una electrónica de potencia para su adecuado manejo y distribución.
Cuenta con la capacidad de moverse en terrenos difíciles y rocosos, ya que posee
seis ruedas dotadas de 3 grados de libertad que le permite adaptarse a terrenos
difíciles.
4 Mars Pathfinder. En: Wikipedia [en línea]. Abril 2010. Disponible en Web: < http://es.wikipedia.org/wiki/Mars_Pathfinder>.

19
Figura 5. Sojourner Rover
Fuente: http://es.wikipedia.org/wiki/Archivo:Rover_Sojourner_lmb.png
Figura 6. Partes del Sojourner Rover
Fuente: http://es.wikipedia.org/wiki/Archivo:Rover_Sojourner_lmb.png
En nuestro país existen proyectos académicos desarrollados por estudiantes de
diferentes universidades sobre robots móviles. Uno de estos proyectos fue

20
realizado por Oscar Iván Morales Solano y Asdrúbal Toledo Dueñas5 estudiantes
de la facultad de ingeniería de diseño y automatización electrónica de la
Universidad de la Salle de Bogotá en 2006. El proyecto consistía en diseñar un
vehículo explorador tele controlado con un sistema de adquisición de video a
bordo, dotado de sensores de temperatura y gases; la dirección del vehículo se
controlo por medio de un sistema inalámbrico de radiofrecuencia.
Otro proyecto de vehículos no tripulados fue realizado por Javier Betancur y
Leonardo Arbeláez6, estudiantes de la Universidad de EAFIT de Medellín en 2004.
El objetivo principal de este proyecto era diseñar un vehículo no tripulado para
labores de desminado humanitario. Básicamente era un mecanismo que ejercía
presión al piso y con esto lograba activar las minas; este vehículo contaba con un
blindaje que soportaba las descargas explosivas y además tenía un sistema de
mando a distancia.
Según el artículo publicado en Wayerless7, los acelerómetros son pequeños
dispositivos que actualmente rodean el entorno del ser humano; estos son
empleados en la mayoría de aparatos que se usan a diario, pero de los cuales no
se había tenido gran conocimiento hasta hace unos pocos años, cuando los
celulares innovaron en el uso de los acelerómetros. Estos dispositivos han sido
usados en los airbags de los automóviles, para detectar si se produjo un
verdadero choque o solo fue una frenada brusca. También es muy común verlos
en las cámaras digitales, donde son utilizados para la estabilización de la imagen.
Los celulares actualmente usan estos dispositivos para girar la imagen de la
pantalla o para cambiar canciones con un solo movimiento del celular (ver Figura 5 MORALES, Oscar Iván y TOLEDO, Asdrúbal. Diseño vehículo explorador. Trabajo de grado. Ingeniería de diseño y automatización electrónica. Bogotá D.C. Universidad de la Sallé. 2006. 123 p. 6 BETANCUR, Javier y ARBELÁEZ, Leonardo. Vehículo no tripulado para tareas de desminado humanitario masivo. Trabajo de grado. Ingeniería mecánica. Medellín. Universidad EAFIT. 2004. 210 p. 7 El boon de los acelerómetros. En: Wayerless [en línea]. 6 junio 2009. Disponible en Web: <http://www.wayerless.com/2009/06/el-boom-de-los-acelerometros-w-guia/>.

21
7). Las aplicaciones de estos dispositivos en celulares son amplias, como por
ejemplo las aplicaciones para los juegos que implemento el iPhone y el iPod
Touch inicialmente (ver Figura 8).
Figura 7. Acelerómetro en teléfonos móviles
Fuente: http://www.celularis.com/wp-content/uploads/2009/04/iphone_acelerometro-450x363.png
Figura 8. Juegos con acelerómetros
Fuente: http://www.wayerless.com/2009/06/el-boom-de-los-acelerometros-w-guia/

22
En combinación con un GPS, el acelerómetro ofrece mucho potencial. Cuando ya
se conoce la posición gracias al satélite, se pueden aportar mas datos gracias a
estos sensores, como frenadas, curvas, velocidades, etc. (inclusive, cuando un
GPS pierde la señal del satélite durante unos segundos, los acelerómetros se
encargan de auxiliarlos calculando la ubicación del objeto).
La aplicación de realidad aumentada utilizada en el teléfono celular Android,
Wikitude, es un gran ejemplo de la combinación entre un GPS y un acelerómetro.
Esta aplicación le permite al teléfono saber no sólo cuándo esta frente a un POI
(Punto Geográfico de Interés histórico o turístico), sino también hacia dónde está
apuntando exactamente la cámara del teléfono. La idea es desplegar videos, fotos
o textos en tiempo real con información de lo que se está mirando (ver Figura 9).
Figura 9. Combinación GPS y acelerómetro.
Fuente: http://www.javipas.com/2009/08/26/realidad-aumentada-un-invento-futurista/

23
Una de las aplicaciones más famosas del acelerómetro, es la que usa el Nintendo
Wii. Esta consola de video juegos, cambió totalmente la forma de divertirse frente
a un televisor. El Wii utiliza el acelerómetro para imitar los movimientos del jugador
y representarlos en la pantalla del televisor; lo único que debe hacer el usuario es
realizar los movimientos que desea que imite el juego, usando un control en el
cual esta insertado el acelerómetro encargado de sensar los movimientos que el
usuario realiza y así enviar la orden, mediante cable en algunos casos, a la
consola para que también los haga (Figura 10).
Figura 10. Acelerómetro en el Nintendo Wii.
Fuente: http://zimmydoom.wordpress.com/2009/02/03/wtf-con-el-wii/
Otra aplicación para los acelerómetros es la implementada por la compañía
AnthroTronix, ubicada en Maryland, que publico “Fieras de la ingeniería8” en un
artículo, donde se muestra el desarrollo de unos guantes equipados con
acelerómetros y sensores que reconocen los movimientos de la mano para así
8 Guantes equipados con acelerómetros de grandes prestaciones en control. En: Fieras de la ingeniería [en línea]. Disponible en Web: < http://www.fierasdelaingenieria.com/guantes-equipados-con-acelerometros-de-grandes-prestaciones-en-control/>.

24
poder realizar funciones especificas (el movimiento que la mano realiza). El
dispositivo es denominado Acceleglove (ver Figuras 11 y 12), este dispositivo
viene con un sistema de código abierto para permitir a los usuarios tener control
total sobre la potencialidad de esta herramienta, transmitiendo la información
desde el guante a la computadora usando una conexión USB.
Figura 11. Acceleglove
Fuente: http://www.fierasdelaingenieria.com/guantes-equipados-con-acelerometros-de-grandes-
prestaciones-en-control/
Figura 12. Acceleglove en uso
Fuente: http://www.fierasdelaingenieria.com/guantes-equipados-con-acelerometros-de-grandes-
prestaciones-en-control/

25
Al combinar los acelerómetros con otros sensores se pueden obtener muy buenas
aplicaciones, como en el caso del Segway9 (ver Figuras 13 y 14). Este dispositivo
en combinación con giroscopios, logra una movilidad en dos ruedas manteniendo
el equilibrio y desplazando al usuario hacia donde este desee, con solo inclinar su
cuerpo.
Figura 13. Componentes del Segway.
Fuente: http://www.segwaycol.com/soporte.htm
9 Características. En: Segway [en línea].Disponible en Web: <http://www.segwaycol.com/quienessomos.htm>.

26
Figura 14. Segway
Fuente: http://www.segwaycol.com/productos.htm
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
Los vehículos tele operados pueden llegar a ser de mucha utilidad en el entorno
en el que el ser humano se desenvuelve hoy en día, en donde las diferentes
capacidades físicas de las personas, facilitan o dificultan las diferentes actividades
del diario vivir. Un ejemplo de ello sucede en los supermercados, en donde una
persona con discapacidad física no tiene la facilidad en manejar los carros del
mercado, haciendo que la actividad de compra sea agotadora para ellos. Los
vehículos tele operados pueden llegar a ser de mucha utilidad en estos casos;
pero uno de los inconvenientes que poseen estos vehículos es la forma de
manejarlos. Los vehículos no tripulados en su mayoría son manejados por
controles de gran volumen y complejidad, que requieren plena atención y
concentración de quien los maneje. Un vehículo que sea manejado fácilmente a
cierta distancia, sin necesidad de que el usuario preste demasiada atención al
control y dirección de este, podrá hacer que esta actividad, que para muchos es
muy común y sencilla de realizar, sea mucho más fácil para las personas que
tienen algún tipo de discapacidad física. La motorización de sillas de ruedas con
mandos sensoriales, mejoraría la calidad de vida de personas discapacitadas al

27
lograr que esta se mueva con la inclinación de la mano hacia adelante, hacia
atrás, derecha o izquierda. ¿Cómo diseñar e implementar un mando de control para un vehículo teleoperado?
1.3 JUSTIFICACIÓN
Se ve la necesidad y utilidad de este tipo de vehículo en el mundo para
desempeñar diferentes labores que faciliten el trabajo de las personas o den
igualdad de condiciones en algunas labores básicas del entorno en el que el ser
humano se mueve hoy en día. La necesidad de anular cualquier tipo de control
utilizando un acelerómetro que permita al operario manejar este vehículo con un
simple movimiento o simplemente caminado y haciendo que este lo siga, puede
facilitar al operario la realización de otra actividad paralela al manejo del vehículo.
Esta forma de manejo de vehículos puede ser implementada en almacenes,
bodegas, entre otros, en donde el vehículo siga a su operario mientras este
camina y selecciona productos colocándolos dentro del vehículo sin prestar
atención a la conducción de este. También podría se implementado en las sillas
de ruedas de personas discapacitadas para facilitar la movilidad de esta,
mejorando la calidad de vida de estas personas.
1.4 OBJETIVOS DE LA INVESTIGACIÓN
1.4.1 Objetivo general. Diseñar e implementar un mando de control para un
vehículo teleoperado.

28
1.4.2 Objetivos específicos.
Establecer el diagrama de flujo tanto para el vehículo como para el control de
mando.
Seleccionar los sensores más adecuados para el manejo del vehículo.
Determinar los dispositivos de control que se usaran tanto para el vehículo
como para el control de mando.
Seleccionar el protocolo de comunicación que se usara entre sistema de control
y vehículo.
Seleccionar los motores y actuadores que se usaran para el movimiento del
vehículo.
Realizar pruebas de funcionamiento con los sensores, el protocolo de
comunicación y alcance entre el vehículo y el mando, y pruebas finales de
funcionamiento del vehículo tele operado.
1.5 ALCANCES Y LIMITACIONES DEL PROYECTO El vehículo tendrá un tamaño aproximado de 17 cm de altura, 22 cm de ancho y
30 cm de largo.
La forma de movimiento será similar a la de un carro real, en dos ejes, eje x
(adelante, atrás) y eje y (izquierda y derecha).
El vehículo no estará en capacidad de subir ni bajar escaleras ni de saltar
obstáculos.
29
2. METODOLOGÍA
De acuerdo con las políticas para la investigación establecidas por la Universidad,
el enfoque de la investigación es Empírico-Analítico ya que la finalidad del
proyecto es la de diseñar e implementar la construcción de un vehículo tele
operado. Se elije este enfoque debido a que el interés del proyecto es técnico,
orientado a la verificación de las aseveraciones teóricas con la experimentación.

30
3. LÍNEA DE INVESTIGACIÓN DE USB / SUB-LÍNEA DE FACULTAD /
CAMPO TEMÁTICO DEL PROGRAMA
Para este proyecto la línea de investigación institucional es la de tecnologías
actuales y de sociedad, ya que el proyecto a desarrollar se desenvuelve en un
entorno actual usando la tecnología con mayor furor y empleándola en beneficio
de la sociedad; la sub-línea de la facultad es instrumentación y control de procesos, ya que se pretende controlar un vehículo utilizando instrumentos que
miden la sensibilidad del movimiento; y el campo temático del programa es
control, debido a la finalidad del proyecto que consiste en manejar un vehículo
mediante un control que posee un acelerómetro, que sensa el movimiento con
respecto a la gravedad de la tierra.

31
4. DESARROLLO INGENIERIL
El trabajo será dividido en dos grandes etapas de desarrollo. La primera estará
enfocada en el control de mando, donde se incluyen los sensores, la etapa de
control del proceso y el sistema de comunicación entre el control y el vehículo.
La segunda etapa se enfoca en el vehículo, la cual está compuesta por: etapa de
recepción del sistema de comunicación, el dispositivo de control, la etapa de
potencia, y los actuadores (motores).
En Figura 15 se muestra el diagrama en bloques general del sistema, en donde
aparecen las dos partes que lo conforman, unidas por medio de una línea de
comunicación unidireccional.
Figura 15. Diagrama en bloques del sistema.
Fuente: Propia
4.1 CONTROL DE MANDO Esta etapa del proyecto se enfocara en el control de mando, determinando los
sensores usados, la etapa de conversión A/D y el sistema de comunicación entre
el control de mando y el vehículo.
Control De Mando Vehículo
32
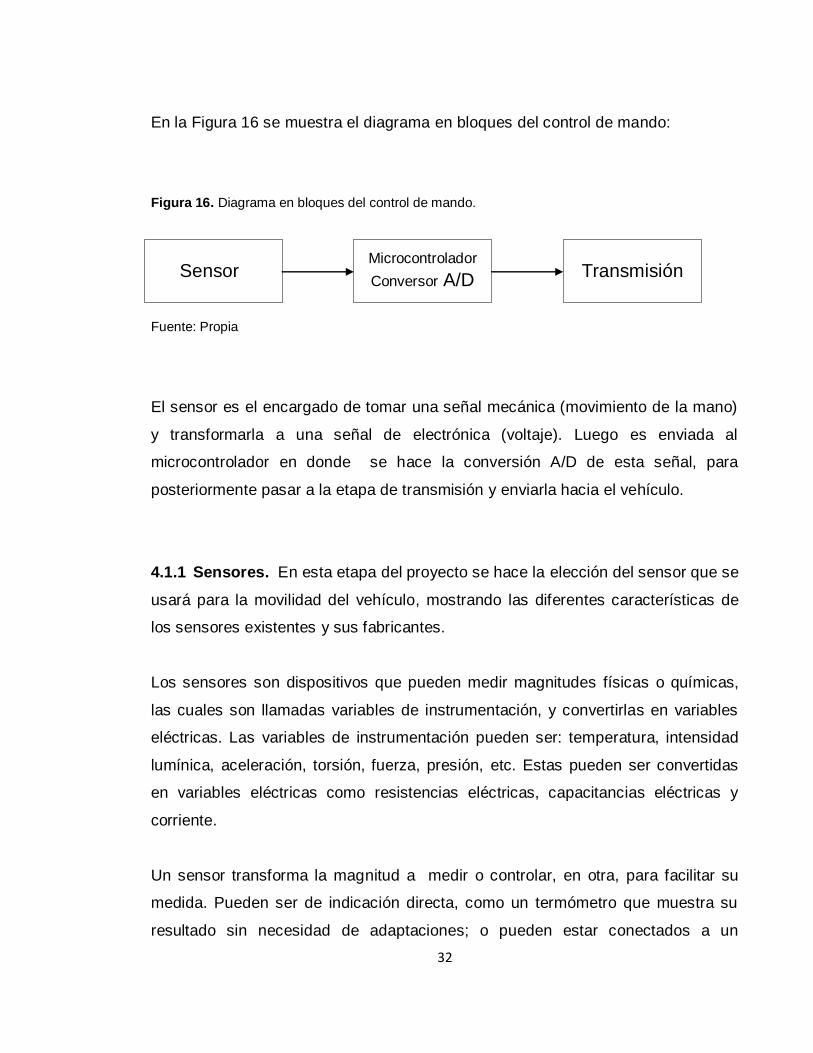
En la Figura 16 se muestra el diagrama en bloques del control de mando:
Figura 16. Diagrama en bloques del control de mando.
Fuente: Propia
El sensor es el encargado de tomar una señal mecánica (movimiento de la mano)
y transformarla a una señal de electrónica (voltaje). Luego es enviada al
microcontrolador en donde se hace la conversión A/D de esta señal, para
posteriormente pasar a la etapa de transmisión y enviarla hacia el vehículo.
4.1.1 Sensores. En esta etapa del proyecto se hace la elección del sensor que se
usará para la movilidad del vehículo, mostrando las diferentes características de
los sensores existentes y sus fabricantes.
Los sensores son dispositivos que pueden medir magnitudes físicas o químicas,
las cuales son llamadas variables de instrumentación, y convertirlas en variables
eléctricas. Las variables de instrumentación pueden ser: temperatura, intensidad
lumínica, aceleración, torsión, fuerza, presión, etc. Estas pueden ser convertidas
en variables eléctricas como resistencias eléctricas, capacitancias eléctricas y
corriente.
Un sensor transforma la magnitud a medir o controlar, en otra, para facilitar su
medida. Pueden ser de indicación directa, como un termómetro que muestra su
resultado sin necesidad de adaptaciones; o pueden estar conectados a un
Sensor MicrocontroladorConversor A/D Transmisión

33
indicador, el cual puede ser un conversor análogo-digital o un display, de modo
que los valores detectados puedan ser leídos por un humano.
Generalmente la señal de salida de estos sensores no está adaptada para su
lectura directa, ni para su procesamiento, por lo que se usa un circuito de
acondicionamiento, el cual incluye amplificadores y filtros electrónicos que adaptan
la señal para usos específicos.
4.1.1.1 Tipos de sensores. Actualmente existe gran variedad de sensores,
dependiendo del uso y de la señal que se desea sensar. En la tabla 1 se muestran
algunos tipos de sensores existentes en el mercado, clasificados dependiendo de
las magnitudes que manejan.
Tabla 1. Tipos de sensores
Magnitudes Transductor Característica
Posición lineal o angular Potenciómetro Analógica
Encoder Digital
Desplazamiento y
deformación
Galga extensiométrica Analógica
Magnetoestrictivos A/D
Magnetorresistivo Analógica
Aceleración Acelerómetro Analógico
Velocidad lineal y angular Encoder Digital
Giróscopo
Fuente: Propia.
Ya que el objetivo principal de este trabajo es diseñar un control de mando para un
vehículo sin la necesidad de utilizar palancas ni botones para utilizarlo, se llega a
la conclusión de que el mejor sensor que se puede utilizar para determinar el

34
movimiento del control es el acelerómetro, ya que este puede determinar el
movimiento del control con respecto a la gravedad de la tierra sin necesidad de
mover palancas o presionar botones.
4.1.1.2 Acelerómetro.
Fundamentos Básicos. La forma de medir la aceleración, según sustenta en
su tesis Rubén Fernández10, es basándose en el principio descubierto por Isaac
Newton en 1687. La segunda ley de Newton dice: “la fuerza neta aplicada sobre
un cuerpo es proporcional a la aceleración que adquiere dicho cuerpo”. La forma
matemática de expresar esta ley está dada por la siguiente ecuación que relaciona
la fuerza (F), la masa (m) y la aceleración (a):
F = (m · a)
a = F / m
Por tanto la fuerza ejercida sobre un cuerpo es directamente proporcional al
producto entre la masa (constante) de dicho cuerpo por la aceleración.
La aceleración y la fuerza son magnitudes vectoriales, tienen una dirección y un
sentido, lo que quiere decir que pueden ser de signo negativo o positivo. En el sistema internacional de medida las unidades de estas variables son:
Fuerza en Newtons [N]
Masa en Kilogramos [kg]
Aceleración en metros por segundo cuadrado [m/s²]
10 FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico. Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 19.

35
La detección de la fuerza que es ejercida sobre una masa por una limitación
elástica es el principio fundamental de los acelerómetros (figura 17).
Figura 17. Principio Fundamental de un acelerómetro
Fuente:http://upcommons.upc.edu/pfc/bitstream/2099.1/4453/1/Sistema%20de%20Adquisici%C3%
B3n%20de%20Posicionamiento%20Geogr%C3%A1fico.pdf
Se tiene una masa m que se encuentra suspendida en uno de los extremos del
resorte y cuya constante de proporcionalidad es k, que se desplaza una distancia
y; en donde la aceleración que sufre el sistema debida a la fuerza restauradora del
resorte es F = k · x. La aceleración es a= [(k · x) / m].
De esta forma se puede derivar la aceleración observando el desplazamiento x de
la masa fija. Esto indica que la aceleración es el cambio de velocidad. Y se mide
en m/s², o en g (donde 1g = 9.81 m/s²).
F = k (x – y) = (m · a)
Donde:
k: es la constante elástica del resorte.
x – y: es la deformación.
m: es la masa.

36
a: la aceleración el cuerpo.
Tipos de acelerómetros.
Acelerómetros mecánicos. Emplean una masa inerte y resortes elásticos.
Los cambios se miden con galgas extensiométricas(), incluyendo sistemas de
amortiguación que evitan la propia oscilación. En este tipo de acelerómetro, una (o
más) galgas extensométricas hacen de puente entre la carcasa del instrumento y
la masa inercial, la aceleración produce una deformación de la galga que se
traduce en una variación en la corriente detectada por un puente de Whetstone, la
deformación es directamente proporcional a la aceleración aplicada al
acelerómetro (Figura 18).
Figura 18. Esquema de un Acelerómetro Mecánico
Fuente: http://content.honeywell.com/sensing/sensotec/accelerometer_faq.asp?category=All
Acelerómetros piezoeléctricos. Se basa en una deformación física del
material, según argumenta Rubén Fernández11 en su tesis, que causa un cambio
en la estructura cristalina y así cambian las características eléctricas. Su principal
() Dispositivo electrónico que puede medir deformaciones. Ante una variación en la estructura del material de la galga se producirá una variación de su resistencia eléctrica. Los materiales que suelen utilizarse para realizar galgas son aleaciones de Cobre y níquel, platino y silicio. 11 FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico. Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 24.
37
inconveniente radica en su frecuencia máxima de trabajo y en la incapacidad de
mantener un nivel permanente de salida ante una entrada común.
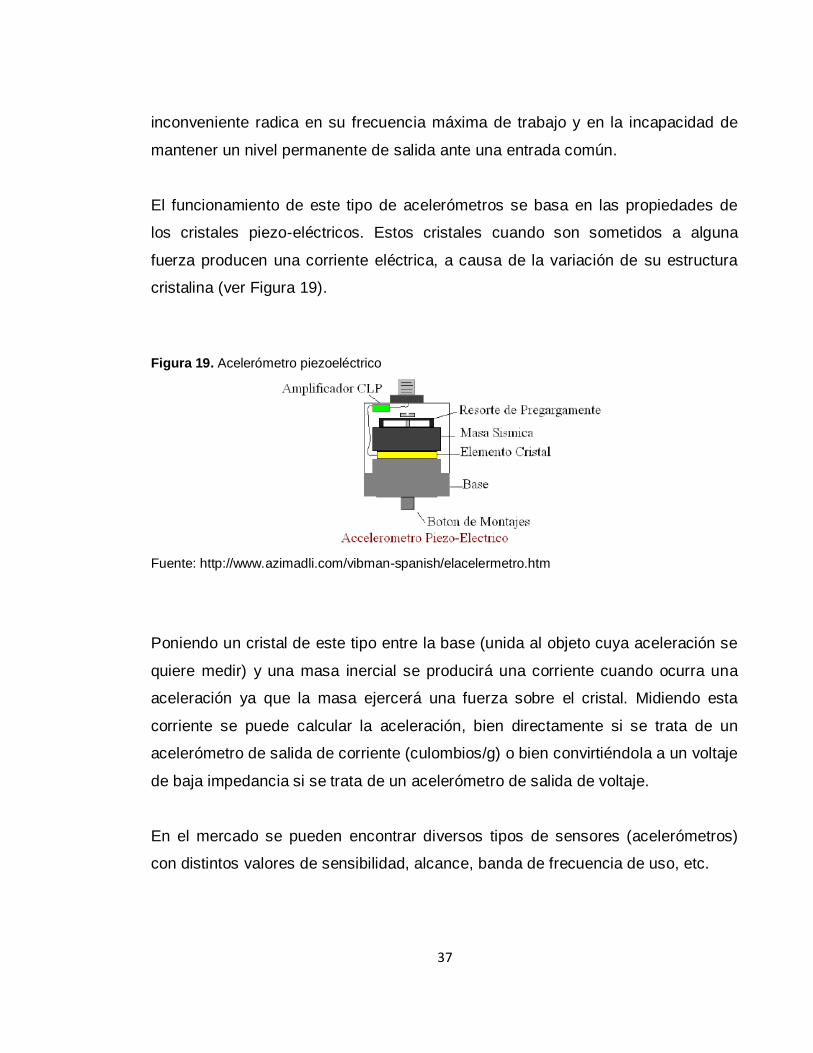
El funcionamiento de este tipo de acelerómetros se basa en las propiedades de
los cristales piezo-eléctricos. Estos cristales cuando son sometidos a alguna
fuerza producen una corriente eléctrica, a causa de la variación de su estructura
cristalina (ver Figura 19).
Figura 19. Acelerómetro piezoeléctrico
Fuente: http://www.azimadli.com/vibman-spanish/elacelermetro.htm
Poniendo un cristal de este tipo entre la base (unida al objeto cuya aceleración se
quiere medir) y una masa inercial se producirá una corriente cuando ocurra una
aceleración ya que la masa ejercerá una fuerza sobre el cristal. Midiendo esta
corriente se puede calcular la aceleración, bien directamente si se trata de un
acelerómetro de salida de corriente (culombios/g) o bien convirtiéndola a un voltaje
de baja impedancia si se trata de un acelerómetro de salida de voltaje.
En el mercado se pueden encontrar diversos tipos de sensores (acelerómetros)
con distintos valores de sensibilidad, alcance, banda de frecuencia de uso, etc.

38
Los sensores piezoeléctricos pre-amplificados son cada vez más usados debido a
la comodidad de su uso, ya que producen un valor de tensión proporcional a la
excitación aplicada, a la salida del amplificador y su comportamiento resulta
independiente del conexionado exterior, puesto que la carga y la resistencia de
entrada del amplificador se mantienen constantes siempre. Este tipo de sensores
requiere de alimentación.
Acelerómetros piezorresistivos. Un acelerómetro piezorresistivo a
diferencia de uno piezoeléctrico utiliza un sustrato en vez de un cristal
piezoeléctrico, según el artículo publicado por Honeywell12, en esta tecnología las
fuerzas que ejerce la masa sobre el sustrato varían su resistencia, que forma parte
de un circuito que mediante un puente de Whetstone mide la intensidad de la
corriente. La ventaja de esta tecnología respecto a la piezoeléctrica es que pueden
medir aceleraciones hasta de cero Hz de frecuencia (Figura 20). Figura 20. Acelerómetro piezoresistivo
Fuente: http://content.honeywell.com/sensing/sensotec/accelerometer_faq.asp?category=All
12 How does a piezo-electric accelerometer work?. En: Honeywell [en línea]. Disponible en Web: < http://content.honeywell.com/sensing/sensotec/accelerometer_faq.asp?category=All>.

39
Acelerómetros capacitivos. Según afirma Rubén Fernández13 en su trabajo
de grado. este dispositivo se basa en la variación de capacitancias entre dos
conductores entre los cuales existe un dieléctrico. Estos acelerómetros están
integrados por un grupo de capacidades fijas y por un grupo de placas centrales
que se encuentran unidas por anillos elásticos que dejan que estas se muevan.
En la figura 21 se muestra el fundamento básico de un acelerómetro basado en
capacitores. Las zonas más oscuras son las capacitancias fijas del circuito.
Figura 21. Esquema interno de un acelerómetro capacitivo
Fuente: Propia
El funcionamiento básico consiste en que mientras la placa que se encuentra en
medio de las dos capacitancias este en el centro, estas capacidades serán iguales
es decir Ca = Cb (Figura 22). Donde d es la distancia entre la placa central y las
capacitancias fijas.
13 FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico. Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 22.

40
Figura 22. Capacitancias iguales Ca = Cb
Fuente: Propia
Si se presenta alguna variación de la distancia entre la placa que se encuentra
entre las dos capacitancias y estas, una de las capacitancias aumenta y la otra
disminuye, tal como se ve en la Figura 23, donde z es el desplazamiento y es igual
a z= (x – y).
Figura 23. Variación en las capacitancias
Fuente: Propia
41
Acelerómetros microelectromecánicos (MEMS). Los avances en la
tecnología micro mecánica, ha permitido que estos dispositivos puedan ser usados
en gran variedad de circuitos. Los acelerómetros están entre los primeros
productos de micro sistemas (MST/MEMS) desarrollados. Los sensores
micrómetro-clasificados tienen la capacidad de medir e interpretar los movimientos
tales como: aceleración, vibración, choque e inclinación. Actualmente se fabrican
un gran volumen y a un bajo costo. Los acelerómetros están en la mejor posición
para moverse con éxito hacia otras aplicaciones, tales como el área médica,
industrial y de transporte. Con relación a la tecnología básica, distinguimos tres
categorías principales de acelerómetros de MEMS: el capacitivo de silicio, el
piezoresistivo y, finalmente, los acelerómetros térmicos (ver Figura 24)
Los fabricantes que usan acelerómetros capacitivos son: DI, Bosch, Denso,
Freescale, Analog Devices, Colibrys, VTI.
Figura 24. Acelerómetros MEMS
Fuente: http://www.neoteo.com/aplicaciones-de-mems-para-telefono-movil.neo
42
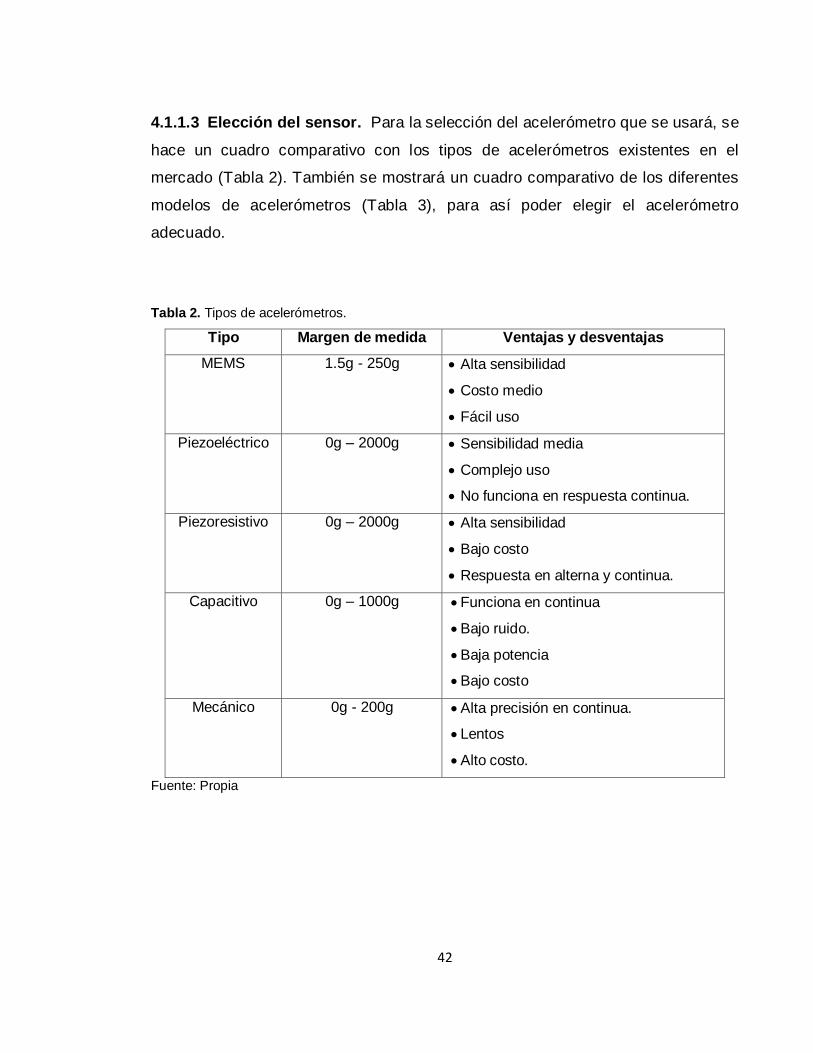
4.1.1.3 Elección del sensor. Para la selección del acelerómetro que se usará, se
hace un cuadro comparativo con los tipos de acelerómetros existentes en el
mercado (Tabla 2). También se mostrará un cuadro comparativo de los diferentes
modelos de acelerómetros (Tabla 3), para así poder elegir el acelerómetro
adecuado.
Tabla 2. Tipos de acelerómetros.
Tipo Margen de medida Ventajas y desventajas
MEMS 1.5g - 250g Alta sensibilidad
Costo medio
Fácil uso
Piezoeléctrico 0g – 2000g Sensibilidad media
Complejo uso
No funciona en respuesta continua.
Piezoresistivo 0g – 2000g Alta sensibilidad
Bajo costo
Respuesta en alterna y continua.
Capacitivo 0g – 1000g Funciona en continua
Bajo ruido.
Baja potencia
Bajo costo
Mecánico 0g - 200g Alta precisión en continua.
Lentos
Alto costo.
Fuente: Propia

43
Tabla 3. Diferentes modelos de acelerómetros.
Modelo Fabricante Aceleración Alimentación Sensibilidad
ADXL325 ANALOG14 ±5 g 2,4 V- 6 V 174 mV/g
ADXL210 ANALOG ±10 g 3 V - 6 V 40mV /g
ADXL326 ANALOG ±3 g 1,8 V - 3,6V 300 mV/g
MMA7260QT
Freescale15
1.5g/2g/4g/6g
2.2 V – 3.6 V 1.5g= 800mV/g
2 g= 600mV/g
4g= 300mV/g
6g= 200mV/g
MMA7361L Freescale ± 1,5 g/ ± 6g 2,2 V - 3,6 V 1.5g= 800mV/g
6g= 206mV/g
Fuente: Propia
Para la elección de sensor se tuvo en cuenta, la disponibilidad en el mercado, la
facilidad de uso, el tamaño, ya que el control debe ser lo más pequeño y delgado
que sea posible, y por último que cumpla con las características para el buen
desempeño del proyecto. Por todo lo anterior se decidió que el acelerómetro que
mejor se ajusta a estas características el MMA7260QT, ya que este dispositivo es
fácil del conseguir en el mercado, las funciones que brinda se acomodan a las
necesidades del proyecto, es muy económico y muy fácil de manejar.
El acelerómetro MMA7260QT, es un acelerómetro capacitivo, que como se
menciono anteriormente, trabaja con dos placas conductoras paralelas tipo
electrodo con un área de exposición y una masa suspendida por medio de un
elemento con rigidez. Entre la masa y los electrodos existe una distancia base
simétrica, que se controla con precisión, por lo que el aire que existe en el hueco
14 Low g iMEMS Accelerometers. En: ANALOG DIVICES [en línea]. Disponible en Web: <http://www.analog.com/en/sensors/inertial-sensors/products/index.html>. 15
Acelerometers Low g. En: Freescale [en línea]. Disponible en Web: <http://www.freescale.com/webapp/sps/site/taxonomy.jsp?nodeId=01126911184209>.

44
entre cada electrodo y la masa sísmica forma un “capacitor mecánicamente
variable”. El cambio en la distancia entre las placas corresponde a los cambios en
la capacitancia. Estos acelerómetros incorporan circuitos micro-eléctricos que
usan puentes capacitivos para convertir el cambio de capacitancia a una señal de
voltaje útil proporcional a la aceleración.
Según la hoja de datos (datasheet) suministrado por Freescale16, el sensor tiene
un encapsulado de tipo superficial con 16 pines. Sus dimensiones son de 6[mm] x
6[mm] x 1,45[mm]. En la figura 25 se muestra el acelerómetro visto desde abajo y
en la figura 26 se muestra una vista desde arriba, con la correspondiente
distribución de pines; en la figura 27 se podrá apreciar el sensor MMA7260QT.
Figura 25. MMA7260QT vista desde abajo.
Fuente: Datasheet MMA7260QT (Anexo A)
16 ±1.5g - 6g Three Axis Low-g Micromachined Accelerometer. En: Freescale [en linea]. Disponible en Web: < http://www.freescale.com/files/sensors/doc/data_sheet/MMA7260QT.pdf>

45
Figura 26. MMA7260QT vista desde arriba con distribución de pines.
Fuente: Datasheet MMA7260QT (Anexo A)
Las características principales de este dispositivo electrónico son:
• Selección del nivel de sensibilidad mediante la conexión de los pines g-Select1 y
g-Select2 (pines 1 y 2) como lo muestra la tabla 4.
Tabla 4. Selección de nivel de sensibilidad del MMA7260QT.
Fuente. Datasheet MMA7260QT (Anexo A)
• Su voltaje de operación es de 2.2 [V] - 3.6 [V]
• Posee un bajo consumo de corriente el cual es de 500[μA]

46
• Posee modo “sleep” o de bajo consumo de 3[μA]
• Viene en encapsulado superficial de 6[mm] x 6[mm] x 1.45[mm]
• Cuenta con un filtro pasa bajo integrado
• Posee un diseño robusto resistente a los golpes
• Posee un bajo costo
• No contiene plomo en los terminales
Figura 27. Acelerómetro MMA7260QT Seleccionado.
Fuente: Propia
4.1.2 Microcontrolador. En esta parte del desarrollo se hablara de los diferentes
tipos de micro controladores que se tuvieron en cuanta para la elección final del
microcontrolador que se usara para convertir la señal análoga que sale del sensor
en digital, para así poder ser transmitida al vehículo.
En su libro Fernando Valdés y Ramón Pallas17 hablan de que un microcontrolador
son circuitos integrados que contienen los recursos fundamentales en un
17 VALDÉS, Fernando y PALLAS, Ramón. Componentes de un microcontrolador. En: Microcontroladores: fundamentos y aplicaciones con PIC. España. 2007. P. 14-24.

47
microcomputador, como la unidad central de procesamiento (CPU), la memoria y
los recursos de entrada y salida, en un único circuito integrado (ver Figura 28).
Figura 28. Diagrama de bloques de un microcontrolador.
Fuente: Microcontroladores: fundamentos y aplicaciones con PIC, Fernando E. Valdés y Ramon
Pallás Areny. Página 14.
Los microcontroladores tienen un oscilador que genera los pulsos que sincronizan
todas las operaciones internas. Aunque este puede ser de tipo RC, normalmente
se usa un cristal de cuarzo (XTAL), ya que este tiene una gran estabilidad de
frecuencia. La velocidad de ejecución de las instrucciones del programa está en
relación directa con la frecuencia del oscilador del microcontrolador.
La CPU es el cerebro del microcontrolador; está ejecuta una a una las
instrucciones del programa, las decodifica y las interpreta. La CPU dispone de
registros, unos que son de propósito general, y otros de propósitos específicos,
como por ejemplo el Registro de Instrucción (RI) que es el encargado de
almacenar la instrucción que está siendo ejecutada por la CPU, el Acumulador
(ACC) que es el registro de las operaciones aritméticas y lógicas que se pueden

48
realizar, el Registro de Estado (STATUS) que es el encargado de agrupar los bits
indicadores de las características del resultado de las operaciones aritméticas y
lógicas realizadas como el signo del resultado o si el resultado es cero, el
Contador de Programa (CP) es el registro de la CPU donde se almacenan
direcciones de instrucciones y el Registro de Direcciones de Datos (RDD) que
almacena direcciones de datos situados en la memoria.
En la memoria del microcontrolador es donde se guardan las instrucciones del
programa y los datos que utiliza. Existen dos tipos de memoria en los
microcontroladores: la memoria RAM (Random Access Memory) que es de lectura
y escritura y es volátil, ya que pierde la información almacenada cuando no tiene
energía de alimentación. La memoria ROM (Read Only Memory) es de solo lectura
y no volátil.
La memoria EPROM se usa para almacenar permanentemente el programa que
debe ser ejecutado por el microcontrolador y en la memoria RAM se almacenan
los datos temporales.
En los microcontroladores las entradas y salidas son importantes ya que a través
de ellas es que interactúan con el exterior. Los puertos paralelo y serie y los
temporizadores pertenecen a la entrada y salida. El microcontrolador también
puede incluir entradas y salidas análogas asociadas a convertidores Análogo-
Digitales o viceversa.
Existen dos tipos de arquitecturas para el modelamiento general del hardware:
arquitectura Von Neumann (Figura 29 a), que utiliza una memoria única para
instrucciones y datos, esto significa, que con un mismo bus de direcciones se
localizan o direccionan instrucciones y datos y que por un único bus de datos
transitan las instrucciones y los datos. La señal de control que emite la CPU para
leer un dato es igualmente usada para leer una instrucción. La arquitectura

49
Harvard utiliza memorias separadas para instrucciones y datos. La memoria de
programa que almacena las instrucciones tiene un bus de direcciones, uno de
datos y un bus de control. La memoria de datos tiene sus buses independientes
también para direcciones, datos y control. La memoria de programa es de solo
lectura y la de datos es de lectura y escritura. La arquitectura Harvard tiene una
mayor velocidad de ejecución de los programas (Figura 29 b). Figura 29. Arquitecturas (a) Von Neumann y (b) Harvard.
Fuente: Microcontroladores: fundamentos y aplicaciones con PIC, Fernando E. Valdés y Ramón
Pallás Areny. Página 23.
4.1.2.1 Microcontroladores PIC (Computadores Programables Inteligentes). Como dicen Valdés y Pallas18 en si libro, estos microcontroladores están basados
en la arquitectura Harvard, con memorias de programa y de datos separadas. La
memoria de programa tiene palabras de 12, 14 ó 16 bits y la memoria de datos
tiene registros de 8 bits. Los PIC son microcontroladores que tienen un número
18 VALDÉS, Fernando y PALLAS, Ramón. Microcontroladores PIC. En: Microcontroladores: fundamentos y aplicaciones con PIC. España. 2007. P. 29-51

50
pequeño de instrucciones: entre 33 y 77. Constan de un registro de trabajo
(registro W) y con registros de la memoria de datos. Para las operaciones
aritméticas y lógicas, uno de los operando debe estar en el registro W y el
resultado se da en W o en otro registro de la memoria de datos. Las transferencias
de datos se realizan entre un registro de la memoria de datos y el registro W. los
PIC usan la técnica de segmentado para la ejecución de las instrucciones, en dos
etapas, de forma que las instrucciones se ejecutan en un ciclo de instrucciones
que equivalen a 4 pulsos del oscilador principal del microcontrolador, exceptuando
las instrucciones de transferencia de control que toman dos ciclos de instrucción.
Los PIC tienen gran cantidad de dispositivos de entrada y salida. Puertos paralelos
de 8 bits, temporizadores, puertos serie sincrónicos y asincrónicos, convertidores
A/D de aproximaciones sucesivas de 8 y 10 bits, convertidores D/A, moduladores
de ancho de pulso PWM (Pulse With Modulation) entre otros.
Los microcontroladores PIC tiene la opción de elegir entre osciladores RC, cristal
de cuarzo y externo. Algunos tiene un oscilador RC interno de aproximadamente 4
MHz. Si se aumenta la frecuencia del oscilador principal, la duración de los cic los
de maquina se acortan y así el tiempo de ejecución de las instrucciones
disminuye, pero con esto se aumenta el consumo de energía.
Figura 30. Oscilador de cristal.
Fuente: Microcontroladores: fundamentos y aplicaciones con PIC, Fernando E. Valdés y Ramón
Pallás Areny. Página 35.
51
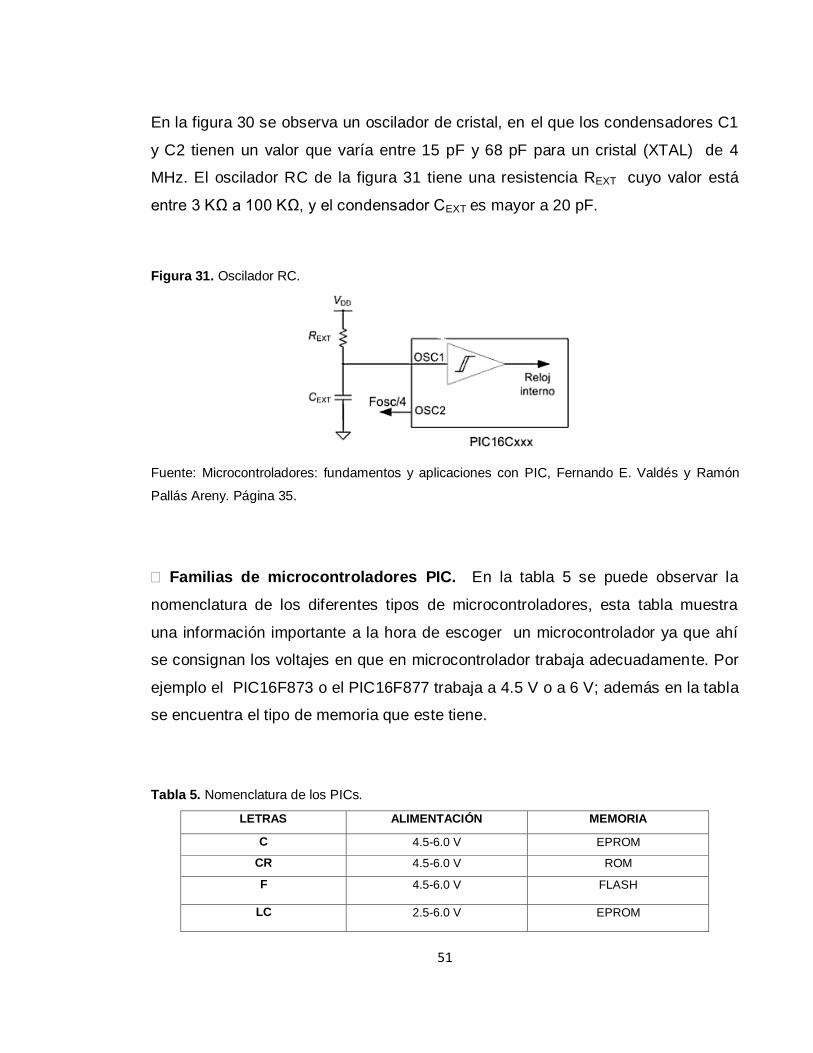
En la figura 30 se observa un oscilador de cristal, en el que los condensadores C1
y C2 tienen un valor que varía entre 15 pF y 68 pF para un cristal (XTAL) de 4
MHz. El oscilador RC de la figura 31 tiene una resistencia REXT cuyo valor está
entre 3 KΩ a 100 KΩ, y el condensador CEXT es mayor a 20 pF. Figura 31. Oscilador RC.
Fuente: Microcontroladores: fundamentos y aplicaciones con PIC, Fernando E. Valdés y Ramón
Pallás Areny. Página 35.
Familias de microcontroladores PIC. En la tabla 5 se puede observar la
nomenclatura de los diferentes tipos de microcontroladores, esta tabla muestra
una información importante a la hora de escoger un microcontrolador ya que ahí
se consignan los voltajes en que en microcontrolador trabaja adecuadamente. Por
ejemplo el PIC16F873 o el PIC16F877 trabaja a 4.5 V o a 6 V; además en la tabla
se encuentra el tipo de memoria que este tiene.
Tabla 5. Nomenclatura de los PICs.
LETRAS ALIMENTACIÓN MEMORIA
C 4.5-6.0 V EPROM
CR 4.5-6.0 V ROM
F 4.5-6.0 V FLASH
LC 2.5-6.0 V EPROM

52
LCR 2.5-6.0 V ROM
LF 2.0-6.0 V FLASH
Fuente: Propia.
Según el tamaño de sus instrucciones, los microcontroladores PIC pueden
clasificarse en 3 grupos:
Gama Baja: Tienen 33 instrucciones de 12 bits, La memoria de programa es de
512 palabras, 1K ó 2K, y la de datos tiene un tamaño que varía entre 25 y 73
bytes.
Gama Media: Tienen 35 instrucciones de 14 bits. Permite interrupciones y pilas
de 8 niveles
Gama Alta: 55 y 77 instrucciones de 16 bits.
Los PIC también se pueden agrupar en las siguientes 5 familias:
PIC10 (6 terminales), PIC12 (8 terminales e incluyen gama baja y media), PIC16
(incluyen gama baja y media), PIC17 (Gama Alta) y PIC18 (Gama Alta) (tabla 6). Tabla 6. Relación familia–gama de los microcontroladores PIC.
Fuente: Microcontroladores: fundamentos y aplicaciones con PIC, Fernando E. Valdés y Ramon
Pallás Areny. Página 45.

53
4.1.2.2 Microcontrolador HC908 de Freescale. A continuación se mostraran
algunas características de esta familia de microcontroladores del fabricante
Freescale.
Los microcontroladores HC908 (figura 32) según Daniel Di Lella19, tienen ventajas
como: una velocidad máxima de bus de 8MHz en 5V, memoria de programación
de tipo Flash, Timers y conversores A/D flexibles, LVI (supervisión de baja tensión)
y tiene una gran posibilidades de comunicaciones con el exterior, ya que puede
usar el PWM, módulos analógicos, sensores de temperatura internos, etc.
Figura 32. Microcontrolador HC908.
Fuente: http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_2.pdf
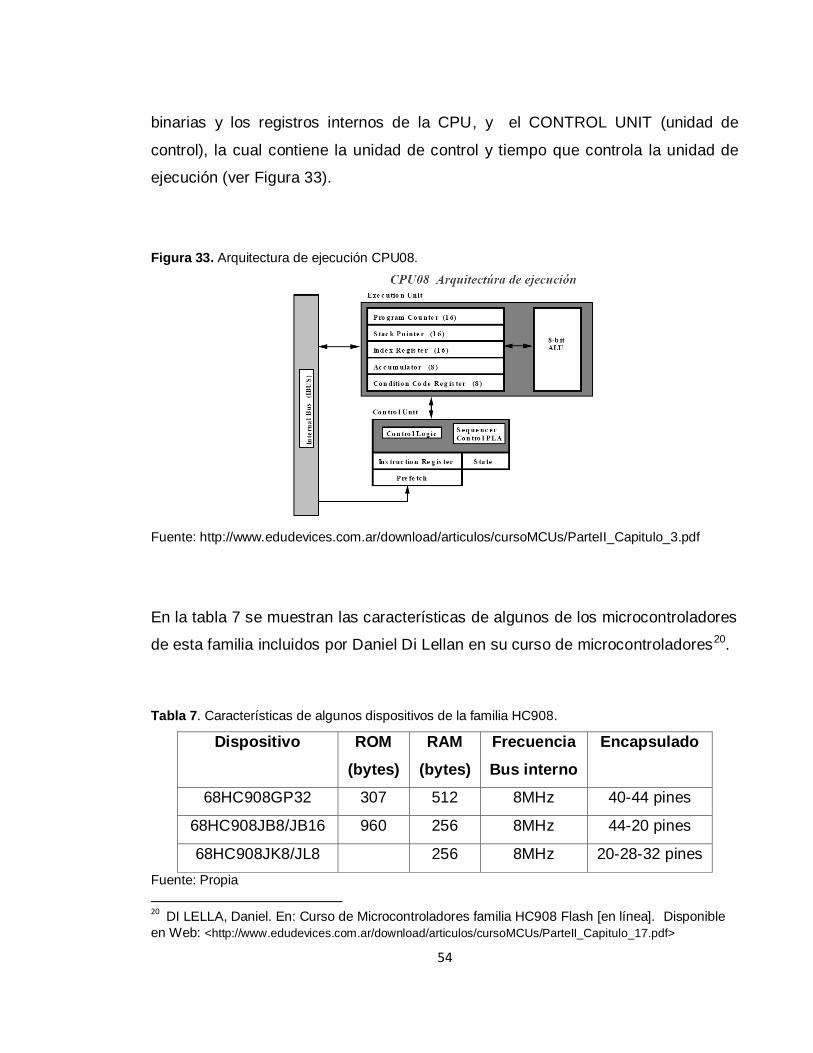
El componente principal de los de los HC908 es la CPU 08. La comunicación de
la CPU con el resto de los componentes del sistema es a través de un Bus de
datos de 8 bits y un Bus de direcciones de 16 Bits. Esta CPU tiene una
arquitectura Von Neuman, en donde existe solo un bus de datos que se usa para
la memoria de programas y para la memoria de datos. Como se ve en la figura 33,
la CPU se divide en dos partes, el EXECUTION UNIT (unidad de ejecución), que
contiene la unidad aritmética y lógica que se encarga de las operaciones lógicas
19 DI LELLA, Daniel. En: Curso de Microcontroladores familia HC908 Flash [en línea]. Disponible en Web: <http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_1.pdf, http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_3.pdf>.
54
binarias y los registros internos de la CPU, y el CONTROL UNIT (unidad de
control), la cual contiene la unidad de control y tiempo que controla la unidad de
ejecución (ver Figura 33).
Figura 33. Arquitectura de ejecución CPU08.
Fuente: http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_3.pdf
En la tabla 7 se muestran las características de algunos de los microcontroladores
de esta familia incluidos por Daniel Di Lellan en su curso de microcontroladores20. Tabla 7. Características de algunos dispositivos de la familia HC908.
Dispositivo ROM
(bytes)
RAM
(bytes)
Frecuencia
Bus interno
Encapsulado
68HC908GP32 307 512 8MHz 40-44 pines
68HC908JB8/JB16 960 256 8MHz 44-20 pines
68HC908JK8/JL8 256 8MHz 20-28-32 pines Fuente: Propia 20
DI LELLA, Daniel. En: Curso de Microcontroladores familia HC908 Flash [en línea]. Disponible en Web: <http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_17.pdf>

55
4.1.2.3 Elección del microcontrolador PIC. En esta parte se mostraran las
características de algunos microcontroladores PIC de gama media, en especial de
la familia PIC16F87X (Figura 34), puesto que se determino que esta familia es la
mejor para trabajar, ya que se encuentra con mayor facilidad en el mercado, el
tamaño del encapsulado es el adecuado para esta aplicación, las funciones que
brinda son primordiales para la elaboración del proyecto y es muy económico.
Algunas de las características más importantes que encontramos en la hoja de
datos (datasheet) del PIC16F87X21, son:
Procesador RISC avanzado.
Solo 35 instrucciones con 14 bits de longitud, que se ejecutan en un ciclo de
instrucción, excepto las de salto que tardan dos.
8K palabras de 14 bits para la Memoria de Programa en los modelos 16F876 y
16F877 y 4KB de memoria para los PIC 16F873 y 16F874.
368 Bytes de memoria de Datos RAM.
Pines de salida compatibles para el PIC 16C73/74/76/77.
14 fuentes de interrupción internas y externas.
Modos de direccionamiento directo e indirecto.
Perro Guardián (WDT).
Código de protección programable.
Voltaje de alimentación entre 2 y 5,5 V.
Bajo consumo: menos de 2 mA valor para 5 V y 4 MHz 20 µA para 3V y 32 MHz
menos de 1 µA en standby.
21 Pic16F87X Data Sheet. En: Microchip [en línea]. Disponible en Web: <http://ww1.microchip.com/downloads/en/devicedoc/30292c.pdf>
56
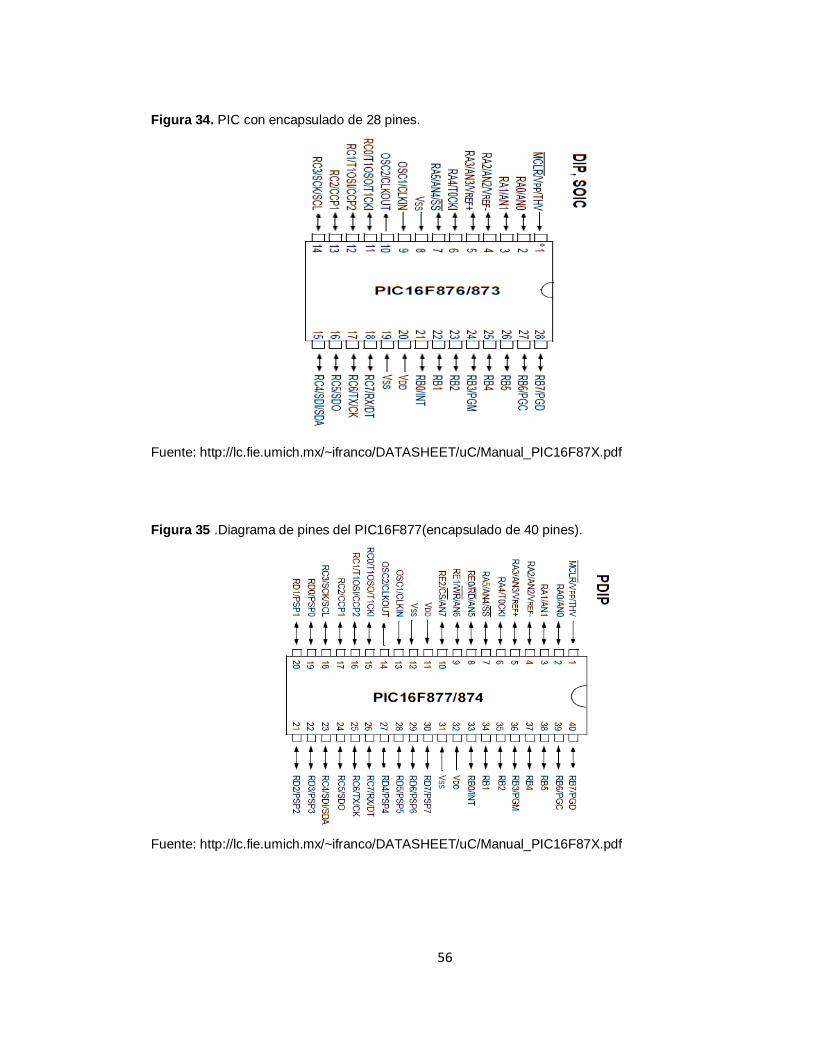
Figura 34. PIC con encapsulado de 28 pines.
Fuente: http://lc.fie.umich.mx/~ifranco/DATASHEET/uC/Manual_PIC16F87X.pdf
Figura 35 .Diagrama de pines del PIC16F877(encapsulado de 40 pines).
Fuente: http://lc.fie.umich.mx/~ifranco/DATASHEET/uC/Manual_PIC16F87X.pdf

57
Algunas diferencias entre los dos encapsulados son los siguientes: el PIC16F873
y el 876 son los modelos que tienen 28 pines y los 16F874 y 877 tienen 40 (Figura
35). Los encapsulados de 40 pines tienen 5 Puertos de E/S: A, B, C, D y E y los
de 28 tienen solo 3 Puertos: A, B y C. Los encapsulados de 40 pines tienen 8
canales de entrada al conversor A/D y los de 28 tienen 5 canales. Los PIC
16F87X de encapsulado de 40 pines son los únicos que poseen el puerto paralelo
esclavo (Ver Tabla 8).
Tabla 8. Características PIC16F873 y PIC16F877
Características 16F873 16F877
Comunicación serie MSSP, USART MMSP, USART
Comunicación paralelo - PSP
Memoria de programa FLASH palabra
14 bits.
4KB 8KB
Puertos E/S A, B y C A, B, C y D
Longitud de la instrucción 14 bits 14 bits
Nº de pines 28 40
Canales A/D 5 8
PWM 2 2
Fuente: Propia
Para la elección del microcontrolador se tuvo en cuenta principalmente su tamaño
(debido que el control del mando debe ser lo más pequeño posible) y su
disponibilidad en el mercado; así que se determino que el mejor microcontrolador
para este proyecto es el PIC16F873. El programa de este microcontrolador solo
realiza la conversión A/D de la señal dada por el sensor y luego la trasmite al
vehículo. El programa se muestra en el Anexo B. En la figura 35 se muestra el
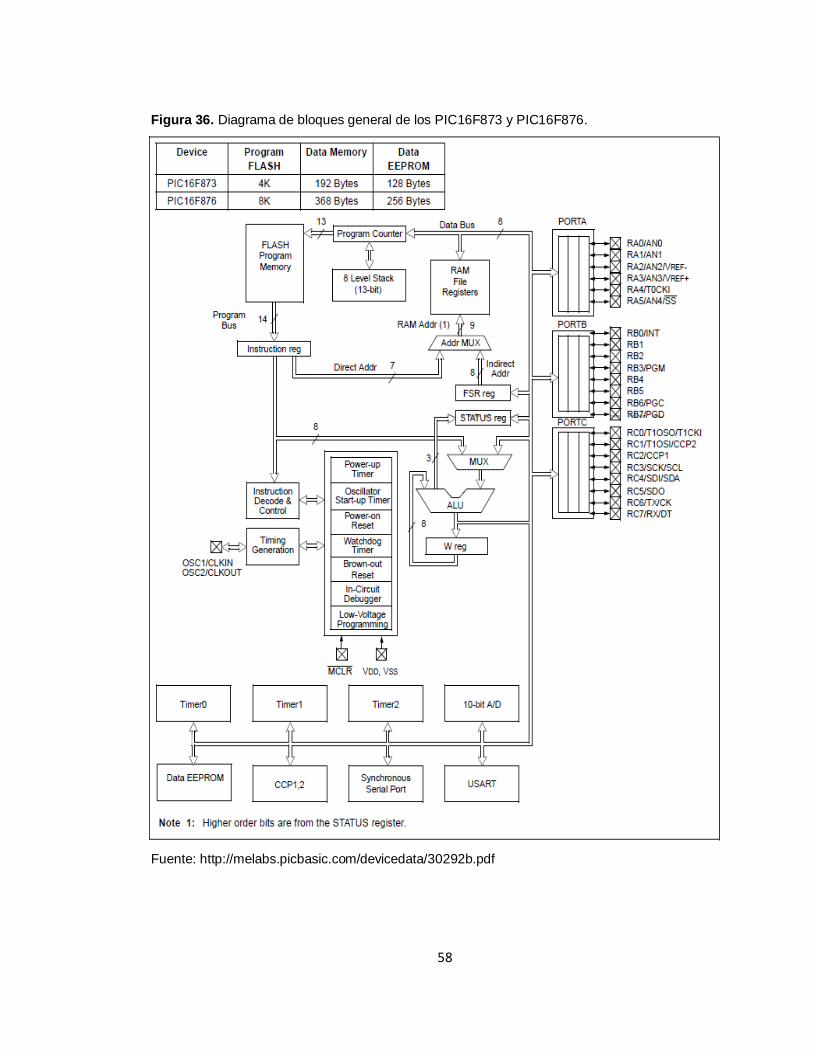
encapsulado del PIC16F873 con sus pines, en la figura 36 se muestra el diagrama
de bloques de los encapsulados de 28 pines.
58
Figura 36. Diagrama de bloques general de los PIC16F873 y PIC16F876.
Fuente: http://melabs.picbasic.com/devicedata/30292b.pdf

59
En la figura 37 se muestra la descripción de los pines de los PIC16F873 y 876.
En el Anexo A se muestran las especificaciones del PIC16F873.
Figura 37. Descripción del Pinout del PIC16F873 y PIC16F876
Fuente: http://melabs.picbasic.com/devicedata/30292b.pdf

60
4.1.3 Transmisión. En esta parte del proyecto, se decidirá qué tipo de
comunicación se usara para la comunicación entre el control de mando y el
vehículo. También se mostrara el dispositivo que se usara para este propósito con
algunas de sus características.
4.1.3.1 Tipos de comunicación. Aquí se mostraran generalidades de los
diferentes dispositivos de comunicación que existen en el mercado.
Existen principalmente dos tipos de comunicación: Alámbrica e inalámbrica. La
primera se basa en el contacto directo entre los dos puntos a comunicar, por
medio de un cable, que puede ser coaxial, fibra óptica, etc. Este tipo de
comunicación limita la posibilidad de desplazamiento si el uso que se desea dar
tiene que ver con movilidad, como es el caso en esta aplicación, aunque una gran
ventaja que posee este tipo de comunicación es su confiabilidad, ya que es más
difícil que la señal se interrumpa o se atenué entre estos dos dispositivos.
El otro tipo de comunicación es la inalámbrica, que a diferencia del alámbrico, los
dos puntos a comunicar no necesitan estar conectados físicamente ya que se
usan ondas electromagnéticas que se propagan en el espacio. Este tipo de
comunicación permite mayor movilidad y distancia entre los puntos que se desean
comunicar, su costo es mucho más bajo. A pesar de sus ventajas, una gran
desventaja que posee la comunicación inalámbrica, es la interferencia que pueden
causar varios factores tales como el clima, los edificios, etc.
En la tabla 9 se muestra un cuadro comparativo entre los dos tipos de
comunicación, en donde se muestran algunas de sus ventajas y desventajas.

61
Tabla 9. Tipos de comunicación
Canal Ventajas Desventajas Alámbrico
• Baja posibilidad de error
• Cables que pueden obstruir el desplazamiento del vehículo. • Poca maniobrabilidad para el vehículo. • Necesita de repetidores para aumentar la distancia de comunicación. • Necesidad de manteniendo por posibles fracturas de cableado.
Inalámbrico
• Gran maniobrabilidad del vehículo. • Ofrece una distancia suficiente para la seguridad del operario.
• Mayor probabilidad de error. • Retrasos en la recepción de la comunicación. • El canal es vulnerable a interrupciones.
Fuente: Propia
Se decidió que el tipo de comunicación que mejor se acomoda a las necesidades
y finalidad del proyecto es la comunicación inalámbrica, ya que permite mayor
movilidad tanto del vehículo como del control de mando y su costo es bajo en
comparación al alámbrico.
4.1.3.2 Comunicación Inalámbrica. Después de haber escogido el tipo de
comunicación, a continuación se mostraran los tipos de comunicación inalámbrica
que existen. En el mercado se pueden encontrar varios tipos de comunicación
inalámbrica entre los cuales podemos destacar: infrarrojo, Bluetooth, WI-FI y RF.

62
Estos están categorizados, según Jordi Mayneen22 en su publicación, en los que
tiene un protocolo estándar y los que no. Entre los que poseen un protocolo
estándar encontramos entre otros el WI-FI y el Bluetooth, y entre los que no tiene
un protocolo estándar encontramos el infrarrojo y el RF.
Ya que los que no poseen un protocolo estándar son más sencillos de usar que
los que poseen, se decidió usar este tipo de comunicación ya que el uso que se le
dará es muy sencillo y no necesita protocolos complicados.
Infrarrojos. Este dispositivo es muy limitado en distancia y siempre tiene que
haber una línea de vista entre los puntos de comunicación (ver figura 38).
Figura 38. Comunicación por infrarrojo.
Fuente: http://tec.upc.es/com/EstadoActual_WirelessRF_SILICA.pdf
Radio Frecuencia (RF). Este sistema permite una comunicación de corto y
mediano alcance y puede atravesar algunas paredes. La comunicación RF
funciona con ondas electromagnéticas que son emitidas desde una fuente y
recibidas en otro punto por un receptor. Estas ondas electromagnéticas viajan por
el aire aproximadamente a la velocidad de la luz.
22 MAYNE, Jordi. En: L’Electronica [en línea]. Disponible en Web: < http://tec.upc.es/com/EstadoActual_WirelessRF_SILICA.pdf>.

63
La frecuencia se mide en hercios o ciclos por segundo y las frecuencias de radio
se miden en KHz, MHz y GHz.
En la tabla 10 se muestra una tabla comparativa entre los dos tipos de
comunicación inalámbrica sin protocolo estándar establecido.
Tabla 10. Características de los dos tipos de comunicación inalámbrica sin protocolo
Características IrDA
(infrarrojo) RF
Alcance 1 metro
(direccional)
50-100 metros
Sensibilidad de recepción (óptica) -114dbm
Velocidad de transmisión Hasta 115.2 Kbps Hasta 115.2 Kbps
Banda de frecuencia
980 nm luz
902 a 928 Mhz y 2.4
Ghz
Desventajas
Línea de vista únicamente,
no multipunto
Limitada capacidad en el
soporte de redes
simultaneas
Ventajas
Bajo precio, alta velocidad Largas distancias, bajos
precios, bajas energía,
desarrollo en sistemas
de redes de seguridad.
Fuente: propia
4.1.3.3 Elección del dispositivo de trasmisión. En la tabla 11 se mostraran
algunos dispositivos existentes en el mercado con sus correspondientes
características.

64
Tabla 11. Características de diferentes transmisores.
Modelo Fabricante Frecuencia Voltaje Velocidad Potencia de salida
TLP315A LAIPAC TECH 315MHz 3-12V 8Kbps 8.8 dBm
TLP418A LAIPAC TECH 418MHz 3-12V 8Kbps 8.8 dBm
TLP434A LAIPAC TECH 433.92MHz 3-12V 8Kbps 8.8 dBm
TRF4400 TEXAS
INSTRUMENTS
450MHz 2.2-3.6V 7 dBm
TRF4900 TEXAS
INSTRUMENTS
950MHz 2.2-3.6V 7 dBm
TRF4903 TEXAS
INSTRUMENTS
928MHz 2.2-3.6V 8 dBm
Fuente: Propia
El dispositivo de transmisión (figura 39) que se eligió para la comunicación del
control de mando y el vehículo es el TLP434A. Este dispositivo se acomoda a la
necesidad del proyecto, tienen un alcance aproximado de 50 a 100 metros en
campo abierto, en la hoja de datos (datasheet) del TLP343A23 que se encuentra
en el Anexo A se pueden apreciar las especificaciones de este dispositivo.
Figura 39. TLP 434A Transmisor
Fuente: http://www.sigmaelectronica.net/tlp434a-pi-670.html 23 TLP434A. En: LAIPAC TECH [en línea]. Disponible en Web: <http://www.laipac.com/Downloads/Easy/tlp434a.pdf>.

65
El dispositivo transmisor tiene de cuatro pines; de izquierda a derecha el primer
pin correspondiente a GND, el siguiente es el pin de datos por donde ingresa la
señal que será transmitida, el tercer pin corresponde a Vcc, y por último está el pin
ANT correspondiente a la antena.
Este dispositivo usa modulación ASK (Amplitude-shift keying), modulación por
desplazamiento de amplitud. Esta modulación representa los datos digitales como
una variación de la amplitud de la onda portadora. En la señal modulada, el valor
lógico 0 es representado por la ausencia de una portadora y el valor lógico 1 es
representada por una portadora con amplitud constante, es decir, para la señal
moduladora vale 1 para un 1 binario y 0 para un cero binario. En la figura 40, se
muestra la modulación de un mensaje con ASK.
Figura 40. Modulación ASK.
Fuente: http://www.textoscientificos.com/redes/modulacion/ask

66
En la figura 41 se muestra el circuito recomendado por el fabricante para la
utilización del módulo RF TLP 434A.
Figura 41. Circuito para conexión TLP434A.
Fuente: http://www.datasheetcatalog.org/datasheets/37/467327_DS.pdf (Anexo A)
Según el fabricante es recomendable usar el codificador HT12E (Anexo A) que se
usa para la conexión con el módulo RF. Este dispositivo es usado para
aplicaciones de control remoto; permite codificar la información que consta de N
bits de dirección y 12-N bits de datos, esta información es transmitida junto a los
bits de cabecera.
Este codificador tiene las siguientes características:
- Operación entre 2.4 y 12 V.
- Tiene baja potencia y alta inmunidad a ruido.
- Aplicaciones en sistemas de alarma, garajes, controles remotos, entre otros.

67
4.1.4 Circuito electrónico del control de mando. El acelerómetro MMA7260QT
sensa el movimiento de la mano con respecto a la gravedad de tierra en los ejes x
y y. Donde x representa el movimiento hacia adelante o hacia atrás y y representa
el movimiento de derecha o izquierda. Este dispositivo envía la señal al
microcontrolador PIC16F873A en donde se hace la conversión A/D. Del
microcontrolador sale la información digitalizada, hacia el codificador HT12-E
donde es modulada (ASK), antes de ser enviada al transmisor TLP434A. La
información enviada por el sensor se envía a una LCD para su visualización.
El componente LM317 es empleado para la regulación y reducción del voltaje de
alimentación de los circuitos integrados, puesto que el microcontrolador trabaja a 5
V y el acelerómetro a 3.3 V.
Figura 42. Diagrama del circuito del control remoto.
Fuente: Propia

68
En la figura 43 se muestra el diagrama de flujo del programa que se utilizo en el
microcontrolador para la transmisión. En este se puede ver la configuración de
cada una de las aplicaciones utilizadas en el microcontrolador como por ejemplo:
La configuración de los puertos de salida, entrada y A/D, se inicializa la
transmisión por RF, luego se esto se inicializa la LCD, luego de esto se toma la
señal que sale del acelerómetro y se inicializan las variables, se lee la posición y
datos de los ejes x y y, se inicializa la conversión A/D, se procesa la información
proporcionada por los ejes y se compara con el dato del offset, si el dato es mayor
se le da una dirección positiva (izquierda o hacia adelante) si no es mayor es
comparada con la menor, si es menor se le da una dirección negativa (derecha o
atrás). Y por último se realiza la transmisión y se visualiza la información en la
LCD.

69
Figura 43. Diagrama de flujo del programa del microcontrolador para la transmisión.
Fuente: Propia

70
4.2 VEHÍCULO
Esta es la segunda etapa del proyecto, en este parte se muestra el vehículo que
será controlado por el acelerómetro. Esta segunda etapa se divide en 3 partes:
1. Etapa de recepción de la señal enviada desde el control de mando. En esta
etapa se demodula la señal que llega del control de mando y que utilizo
modulación ASK.
2. La etapa de control en donde se determina la acción de los actuadores
dependiendo de la señal recibida desde el control y donde se hace la conversión
D/A.
3. Los actuadores, que en este caso son motores, los cuales moverán el vehículo.
En la figura 44 se muestra el diagrama de flujo del vehículo.
Figura 44. Diagrama de flujo de los componentes instalados en el vehículo.
Fuente: Propia
El receptor toma la señal enviada desde el control de mando, demodulandola y
llevándola al microcontrolador, en donde se realiza el control de los actuadores y
la conversión D/A. la salida del microcontrolador es enviada a los actuadores
(motores), logrando así el movimiento del vehículo.
4.2.1 Recepción. Para la parte de recepción de la señal en el vehículo se
determino que la mejor opción es usar un receptor del mismo fabricante del
Recepción Control y
Conversión D/A Actuadores
71
transmisor y utilizando la misma frecuencia. LAIPAC TECH ofrece dos opciones
para recepción de la señal emitida por el transmisor TLP434A: el RLP343 y el
RPL343A. Estos dos dispositivos trabajan a una frecuencia de 433.92MHz. El
receptor RLP343A tiene gran inmunidad contra ruido y es mucho más costoso
que el RLP343. Por ello se estableció que se usara el receptor RLP343, ya que
cumple con especificaciones mínimas requeridas para la recepción de la señal
enviada desde el trasmisor.
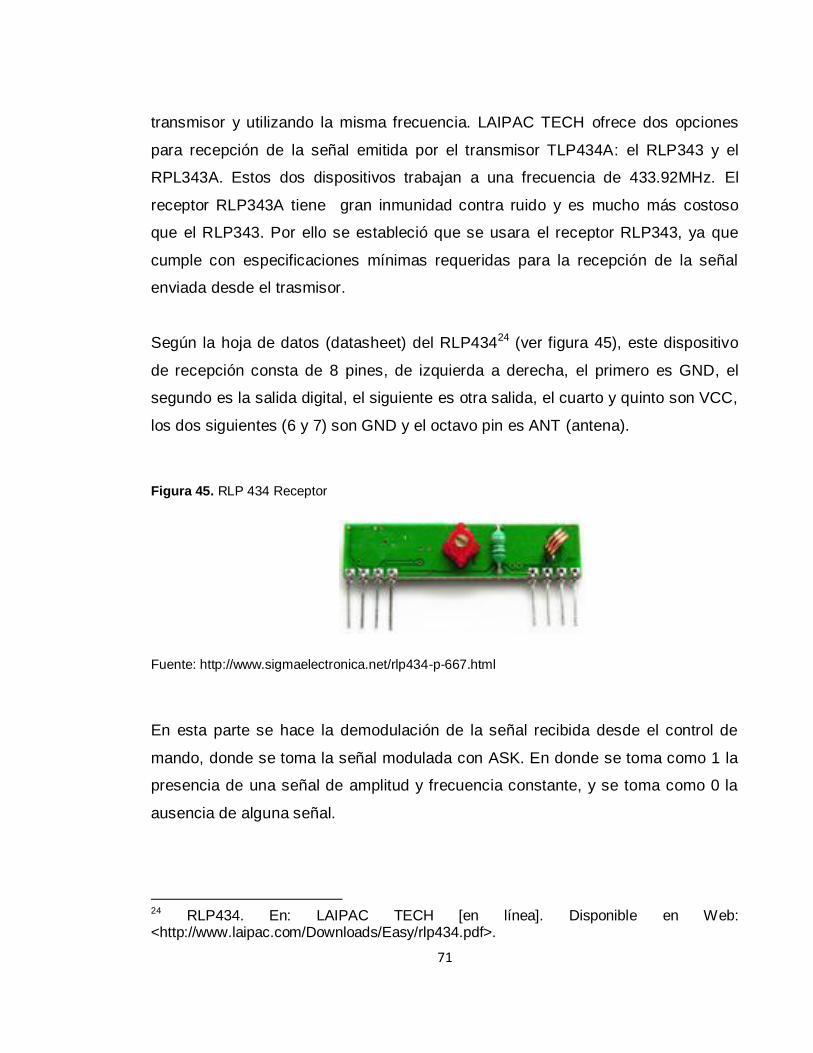
Según la hoja de datos (datasheet) del RLP43424 (ver figura 45), este dispositivo
de recepción consta de 8 pines, de izquierda a derecha, el primero es GND, el
segundo es la salida digital, el siguiente es otra salida, el cuarto y quinto son VCC,
los dos siguientes (6 y 7) son GND y el octavo pin es ANT (antena).
Figura 45. RLP 434 Receptor
Fuente: http://www.sigmaelectronica.net/rlp434-p-667.html
En esta parte se hace la demodulación de la señal recibida desde el control de
mando, donde se toma la señal modulada con ASK. En donde se toma como 1 la
presencia de una señal de amplitud y frecuencia constante, y se toma como 0 la
ausencia de alguna señal.
24 RLP434. En: LAIPAC TECH [en línea]. Disponible en Web: <http://www.laipac.com/Downloads/Easy/rlp434.pdf>.

72
Según el fabricante, es recomendado usar en el circuito un decodificador HT12D
(Anexo A). Se realiza tres veces continuas una comparación de las direcciones
entregadas con sus direcciones locales, si se comprueba que no hay errores, la
información pasa a los pines de salida. En la figura 46 se puede observar una
aplicación de este receptor. En este se usa un microcontrolador de 8 bits, para una
determinada aplicación y se puede ver el decodificador H12D. Figura 46. Circuito de aplicación del RLP343.
Fuente: http://www.datasheetcatalog.org/datasheets/37/467327_DS.pdf (Anexo A).
4.2.2 Control. En esta etapa del proyecto se muestra el uso que se le da al
microcontrolador, ya que no solo es el encargado de la conversión Digital-Análogo
de la señal, sino que también se encargara de realizar la etapa de control de los
actuadores.
El microcontrolador seleccionado para esta parte del proyecto, al igual que el
microcontrolador seleccionado para el control de mando es el PIC16F873A. Las
indicaciones y características de este dispositivo fueron presentadas en numeral
Se seleccionó el mismo microcontrolador debido a que en esta etapa también es

73
importante el tamaño, ya que el vehículo que se va a manejar no tiene mucho
espacio para ubicar todos los componentes necesarios en esta etapa. También se
selecciono, ya que se tiene más familiaridad con el PIC.
El programa que ejecuta este microcontrolador se muestra en el Anexo B.
4.2.3 Actuadores. Para mover el vehículo se utilizaron motores de corriente
continua, controlado mediante uno de los módulos que ofrece el microcontrolador
que es la modulación de ancho de pulso (PWM) con ayuda de un sistema llamado
puente H y optoacopladores.
Motores DC. Los motores DC (Direct Current, convierten la energía eléctrica
en mecánica, usando el movimiento rotatorio principalmente. Estos motores tiene
como principal característica la posibilidad de regular la velocidad desde vacío a
plena carga. Dos piezas fundamentales componen este tipo de motor:
Rotor: esta es la parte móvil del motor, es el que proporciona el torque para
mover a la carga. Esta formado por, un eje que lo constituye una barra de acero.
Un núcleo que esta ubicado sobre el eje, formado por laminas de hacer y su
función es la de suministrar un trayecto magnético entre los polos para que circulo
el flujo magnético del devanado; el núcleo laminado tiene ranuras por toda su
superficie para contener el bobinado. Devanado, que consta de bobinas aisladas
entre si, están alojadas en las ranuras y están conectadas de forma eléctrica con
el colector. Colector, esta formado por laminas de material conductor separadas
entre si y del centro del eje por un aislante, esta ubicado sobre uno de los
extremos del eje del rotor y de ese modo gira con este logrando así contacto con
las bobinas; su función es la de recoger la tensión que se produce por el devanado
inducido y luego transmitiéndola al circuito promedio de las escobillas. En la figura
47 se muestra los componentes del rotor.

74
Figura 47. Rotor
Fuente: http://www.todorobot.com.ar/documentos/dc-motor.pdf
Estator: tiene como función suministrar el flujo magnético que será usado por
el bobinado del rotor para realizar el movimiento giratorio. Esta formado por un
armazón que tiene como función servir como soporte y suministrar una trayectoria
de retorno al flujo magnético del rotor y del imán permanente, y así completar el
circuito magnético. También esta formado por un imán permanente que tiene
como función otorgar un campo magnético uniforme al devanado del rotor,
logrando así que interactué con el campo formado por el bobinado y originando así
el movimiento del rotor como respuesta de la interacción de estos campo. En la
figura 48 se ve los componentes del estator.
Figura 48. Estator.
Fuente: http://www.todorobot.com.ar/documentos/dc-motor.pdf

75
El funcionamiento básico del motor DC se basa en la ley de Lorentz , que dice que
cuando un conductor pasa por una corriente eléctrica se sumerge en un campo
magnético, el conductor sufre una fuerza perpendicular al plano formado por el
campo magnético y la corriente, siguiendo la regla de la mano derecha. En la
figura 49, se muestra el funcionamiento básico del motor DC.
Figura 49. Componentes del motor DC.
Fuente: http://es.wikipedia.org/wiki/Motor_de_corriente_continua
En la figura 50 se muestra como se realiza el movimiento del motor, de acuerdo a
los campos que interactúan dentro de el.

76
Figura 50. Movimiento de un motor DC.
Fuente: http://es.wikipedia.org/wiki/Motor_de_corriente_continua
PWM: Para la modulación de ancho de pulso (figura 51) será necesario
capturar las revoluciones del motor para así poder mantener la velocidad
constante, la principal función del PWM es poder manejar la velocidad del motor
según la necesidad del usuario esto lo realiza con un tratamiento que se le hace a
una señal cuadrada para variarle su frecuencia y por ende se varia la velocidad del
motor puesto que si la variación se realiza por pulso no muy frecuentes el

77
movimiento del motor se podrá ver como si fuera por pasos, esto quiere decir que
el motor generará movimiento cada vez que llegue un pulso.
El ciclo de trabajo de una señal periódica es el ancho relativo de su parte positiva
en relación con el período. Expresado matemáticamente:
D= Es el ciclo de trabajo
τ= Es el tiempo en que la función es positiva (ancho del pulso)
T= Es el período de la función
Figura 51. Modulación de ancho de pulso PWM
Fuente: http://www.dtic.upf.edu/~jlozano/interfaces/PWM.gif
Puente H: Es un circuito electrónico que permite al motor DC girar en ambos
sentidos (adelante y atrás). Esta constituido con 4 interruptores, que pueden ser
mecánicos o mediante transistores. En la figura 52 se muestra un puente H para

78
un control del motor, si los transistores Q2 y Q5 están cerrados y los Q4 y Q3
abiertos, se aplica una tensión positiva en el motor, haciendo que gire en un
sentido. Abriendo los Q4 y Q3, y cerrando los Q2 y Q, el voltaje se invierte,
haciendo que el motor gire en sentido contrario.
Figura 52. Puente H de control de motor.
Fuente: http://www.globu.net/pp/ES/circuito_puente.JPG
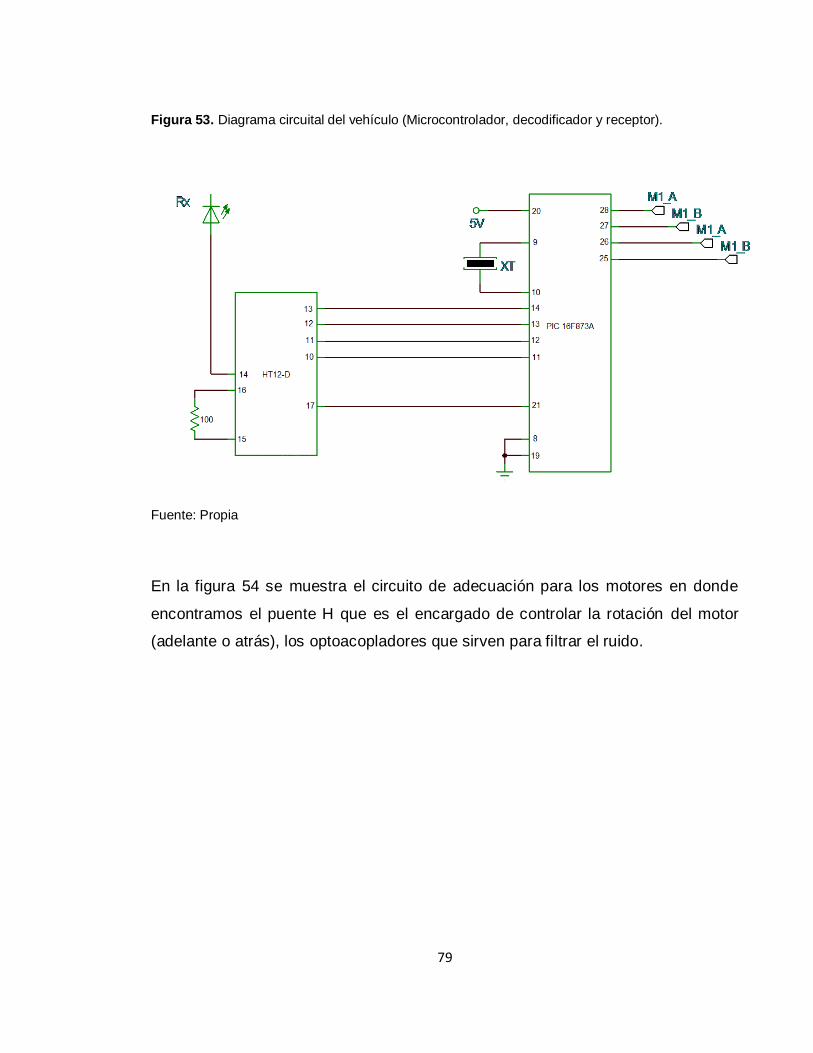
4.2.4 Circuito Electrónico del vehículo. En la figura 54 se muestra el circuido
de recepción que está ubicado en el vehículo. El receptor RLP434 recibe la señal
que se transmitió desde el control de mando y la demodula, luego se pasa al
decodificador HT12-D. de la salida del decodificador pasa al microcontrolador en
donde se hace la conversión D/A para poder controlar los motores.
79
Figura 53. Diagrama circuital del vehículo (Microcontrolador, decodificador y receptor).
Fuente: Propia
En la figura 54 se muestra el circuito de adecuación para los motores en donde
encontramos el puente H que es el encargado de controlar la rotación del motor
(adelante o atrás), los optoacopladores que sirven para filtrar el ruido.

80
Figura 54. Diagrama circuital del vehículo (Puente H, optoacopladores y motor)
Fuente: Propia

81
En la figura 55 se muestra el diagrama de flujo del programa del microcontrolador
para la recepción en donde encontramos la recepción, la configuración de los
puertos y el movimiento de los motores.
Inicialmente se configuran los puertos que se usaran, luego se pone en cero “0” la
salida hacia los motores para que estos estén apagados. Si llega algún dato este
pasa a ser comparado con el dato uno “1” (x=y=0) si es igual al dato “1” se apagan
los motores de lo contrario pasa a comparar con el dato dos “2” (x>0, y=0) si es
igual entonces el motor 1 va hacia adelante y el motor 2 está apagado; si no es
igual al dato “2” pasa a comparar con el dato tres “3” (x<0, y=0) si es igual el motor
1 va hacia atrás y el motor 2 se queda apagado. Si la comparación anterior no es
cierta pasa a ser comparada con el dato cuatro “4” (x=0, y>0) si es igual el motor 1
está apagado y el motor 2 va hacia la izquierda. Si la comparación no es cierta
esta se compara con el dato cinco “5” (x=0, y<0) si es igual el motor 1 permanece
apagado y el motor 2 va hacia la derecha. Si esta comparación no es cierta se
compara con el dato seis “6” (x>0, y>0) si es igual el motor 1 va hacia adelante y el
motor 2 va hacia la izquierda. Si esta comparación no es cierta se compara con el
dato siete “7” (x>0, y<0) si es igual el motor 1 va hacia adelante y el motor 2 va
hacia derecha. Si esta comparación no es cierta se compara con el dato ocho “8”
(x<0, y>0) si es igual el motor 1 va hacia atrás y el motor 2 va hacia la izquierda.
Por último si esta comparación no es cierta se compara con el dato nueve “9” (x<0,
y<0) si es igual el motor 1 va hacia atrás y el motor 2 va hacia la derecha.
Finalmente el ciclo es repetitivo desde la llegada del dato.

82
Figura 55. Diagrama de flujo del programa del microcontrolador para la recepción
Fuente: Propia

83
5. DESCRIPCIÓN Y ANÁLISIS DE RESULTADOS
Con base al diseño propuesto se construyó un prototipo de un control el cual es el
encargado de darle órdenes a un vehículo. Este mando funciona con un
acelerómetro MMA7260QT, un microcontrolador 16f873A, un transmisor TLP 434A
y un codificador HT12-E. Y un prototipo de recepción (vehículo) el cual utiliza un
microcontrolador 16f873A, un receptor RLP 434 y un decodificador HT12-D.
Control de mando. Se realizaron las pruebas correspondientes con el
acelerómetro ADXL321 no teniendo un buen resultado con este sensor ya que
este era muy sensible y el ruido lo afectaba notablemente, luego de esto se
hicieron pruebas con el MMA7260QT teniendo una gran aceptación por parte del
grupo desarrollador ya que el sensor era muy versatilidad y de fácil manejo.
En esta etapa también se uso una LCD de 14 pines de referencia LCM0802B, en
la figura 56 se ven las especificaciones de esta LCD. En la LCD se puede
visualizar el comportamiento de los dos ejes que maneja el carro. En el eje x se
muestra un rango de velocidad que el carro maneja hacia delante y hacia atrás, en
donde +9 es el máximo hacia adelante y -9 es el máximo hacia atrás. En el eje Y
se muestra la dirección del carro, donde +1 indica que se mueve hacia la izquierda
y -1 indica movimiento hacia la derecha.
Los programas de los microcontroladores se pueden encontrar en el Anexo B.

84
Figura 56. Esquema general y pines de la LCM08002B.
Fuente: http://www.longtech- display.com/PRODUTS/LCD%20MODULES/longtech%20pdf/LCM0802B.pdf
Durante el proceso de programación del PIC existieron factores importantes a la
hora de toma de decisiones ya que el acelerómetro cuenta con una calibración de
sensibilidad la cual es muy importante puesto que este sensor se maneja con el
movimiento de la mano no posee palancas ni botones por tanto si se dejaba muy
sensible era posible que se saliera del rango ya que iba a alcanzar la velocidad
máxima en cuestiones de segundos. Esta sensibilidad afecta tanto para la
velocidad del vehículo como para la dirección.
Vehículo.
Los programas de los microcontroladores se pueden encontrar en el Anexo B.
Finalmente el vehículo funcionó como se esperaba teniendo éxito en cada uno de
nuestros objetivos.
En la figura 57 se muestra el producto final del proyecto, es donde se ve el
vehículo con su control de mando.

85
Figura 57. Fotografía del vehículo y control de mando.
Fuente: Propia.
El diseño de las tarjetas con el correspondiente montaje de componentes se
puede observar en el Anexo C

86
6. CONCLUSIONES
La selección del dispositivo (acelerómetro) se realizó con la técnica prueba y
error se probaron varios dispositivos dando como resultado la elección del
MMA7260QT puesto que es un sensor que ofrece una buena sensibilidad, fácil
manejo, económico y de fácil adquisición.
Los parámetros que se tuvieron en cuenta para la elección del dispositivo de
control fueron las funciones que este nos brindo (puertos, PWM, etc) y su
pequeño tamaño que brindaba para el desarrollo ingenieril.
Se empleo la radiofrecuencia (RF) puesto que esta nos permite alcanzar
distancias suficientes para los requerimientos del proyecto, buena confiablidad,
libertad de movimiento para el vehículo y bajo costo.
Se determino que los mejores actuadores para este proyecto son los motores
DC, ya que son los mas sencillos de manejar, su funcionamiento es sencillo y
en el mercado se encuentra en gran variedad de dispositivos, como en
vehículos a escala.

87
7. RECOMENDACIONES
Se recomienda que para un mejor desempeño del vehículo se use un mejor
dispositivo de comunicación, que tenga un mejor alcance y que tenga mejor
filtrado de ruido para que no interfiera con la finalidad del vehículo. También es
recomendable usar motores paso a paso, para mejorar el control de posición y así
lograr una mayor precisión en el movimiento del vehículo.
La implementación de este proyecto puede ser de gran utilidad en las sillas de
ruedas, puesto que esto ayuda a mejorar la movilidad de personas discapacitadas,
aparte es una herramienta muy funcional para personas cuadripléjicas (solo
pueden mover la cabeza) ya que este se puede implementar para ponerse en
cualquier parte de la cabeza y así la persona se pueda desplazar solo con el
movimiento de la misma. En robótica se puede implementar con dos ruedas que
tengan un motor y una tercera que sea “loca”.

88
BIBLIOGRAFÍA
Acelerometers Low g. En: Freescale [en línea]. Disponible en Web:
<http://www.freescale.com/webapp/sps/site/taxonomy.jsp?nodeId=0112691118420
9>.
BETANCUR, Javier y ARBELÁEZ, Leonardo. Vehículo no tripulado para tareas de
desminado humanitario masivo. Trabajo de grado. Ingeniería mecánica. Medellín.
Universidad EAFIT. 2004. 210 p.
Características. En: Segway [en línea].Disponible en Web:
<http://www.segwaycol.com/quienessomos.htm>.
DI LELLA, Daniel. En: Curso de Microcontroladores familia HC908 Flash [en línea]. Disponible en Web: <.http://www.edudevices.com.ar/download/articulos/cursoMCUs/ParteII_Capitulo_17.pdf>
El boom de los acelerómetros. En: Wayerless [en línea]. 6 junio 2009. Disponible
en Web: <http://www.wayerless.com/2009/06/el-boom-de-los-acelerometros-w-
guia/>.
FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico.
Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad
Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 19.

89
FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico.
Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad
Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 22
FERNÁNDEZ, Rubén. Sistema de adquisición de posicionamiento geográfico.
Trabajo de grado. Ingeniería técnica de telecomunicaciones. España. Universidad
Politécnica de Cataluña. Facultad de Ingeniería. 2007. P. 24
Guantes equipados con acelerómetros de grandes prestaciones en control.
En: Fieras de la ingeniería [en línea]. Disponible en Web:
<http://www.fierasdelaingenieria.com/guantes-equipados-con-acelerometros-de-
grandes-prestaciones-en-control/>.
How does a piezo-electric accelerometer work?. En: Honeywell [en línea].
Disponible en Web:
<http://content.honeywell.com/sensing/sensotec/accelerometer_faq.asp?category=
All>.
Japoneses diseñan robots para salvar vidas. En: PARITARIOS [en línea]. Chile.
Disponible en Web: <http://www.paritarios.cl/ciencia_robot_salva%20_vidas.htm>.
Low g iMEMS Accelerometers. En: ANALOG DIVICES [en línea]. Disponible en Web: <http://www.analog.com/en/sensors/inertial-sensors/products/index.html>.
90
Mars Pathfinder. En: Wikipedia [en línea]. Abril 2010. Disponible en Web:
<http://es.wikipedia.org/wiki/Mars_Pathfinder>.
MAYNE, Jordi. En: L’Electronica [en línea]. Disponible en Web: <
http://tec.upc.es/com/EstadoActual_WirelessRF_SILICA.pdf>.
MORALES, Oscar Iván y TOLEDO, Asdrúbal. Diseño vehículo explorador. Trabajo
de grado. Ingeniería de diseño y automatización electrónica. Bogotá D.C.
Universidad de la Sallé. 2006. 123 p.
Móviles o vehículos robot. En: HISTORIA DEL ARTE DE LA ROBÓTICA [en
línea]. 1 abril 2009. Disponible en Web: < http://robotik-
jjlg.blogspot.com/2009/04/moviles-o-vehiculos-robot.html>.
Pic16F87X Data Sheet. En: Microchip [en línea]. Disponible en Web: <
http://ww1.microchip.com/downloads/en/devicedoc/30292c.pdf>
RLP434. En: LAIPAC TECH [en línea]. Disponible en Web:
<http://www.laipac.com/Downloads/Easy/rlp434.pdf>.
TLP434A. En: LAIPAC TECH [en línea]. Disponible en Web:
<http://www.laipac.com/Downloads/Easy/tlp434a.pdf>.
VALDÉS, Fernando y PALLAS, Ramón. Componentes de un microcontrolador. En:
Microcontroladores: fundamentos y aplicaciones con PIC. España. 2007. P. 14-24.
91
VALDÉS, Fernando y PALLAS, Ramón. Microcontroladores PIC. En:
Microcontroladores: fundamentos y aplicaciones con PIC. España. 2007. P. 29-51
Vehículos teleoperados. En: Sistemas de percepción y control [en línea]. España.
Disponible en Web: < http://www.s-pc.com/productos_vehiculos.html>.
±1.5g - 6g Three Axis Low-g Micromachined Accelerometer. En: Freescale [en
linea]. Disponible en Web:
<http://www.freescale.com/files/sensors/doc/data_sheet/MMA7260QT.pdf>

92
ANEXO A
Especificaciones técnicas de los dispositivos.
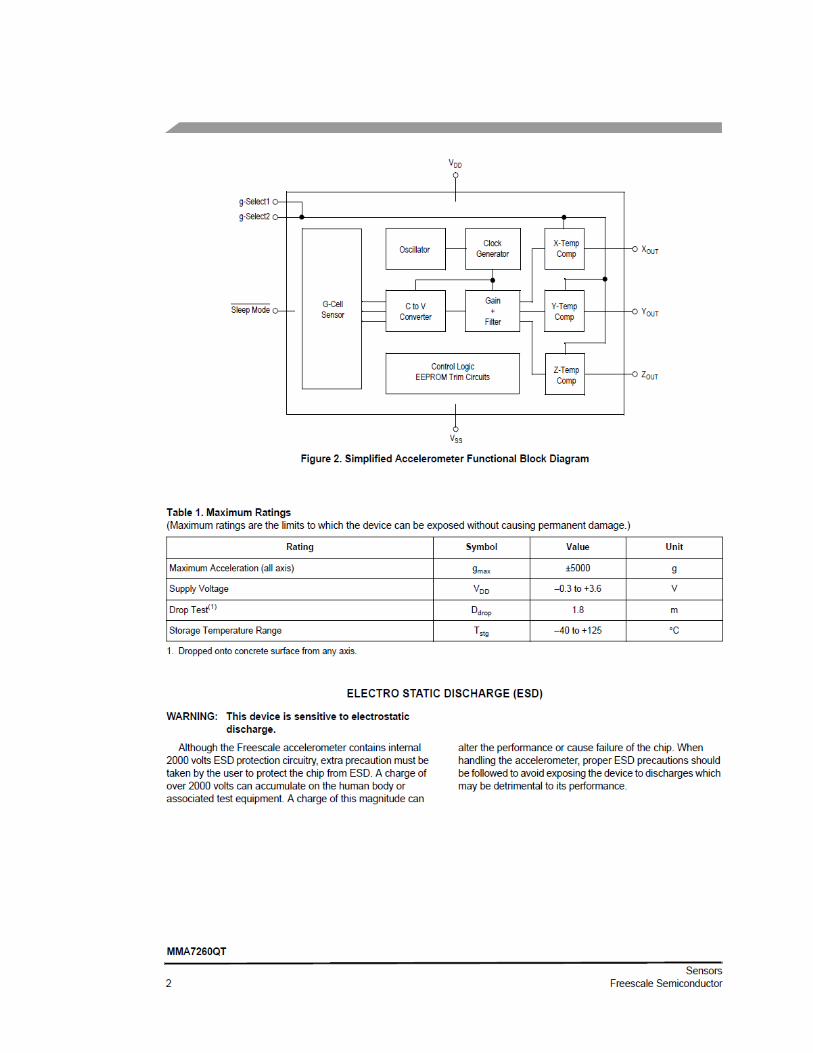
93
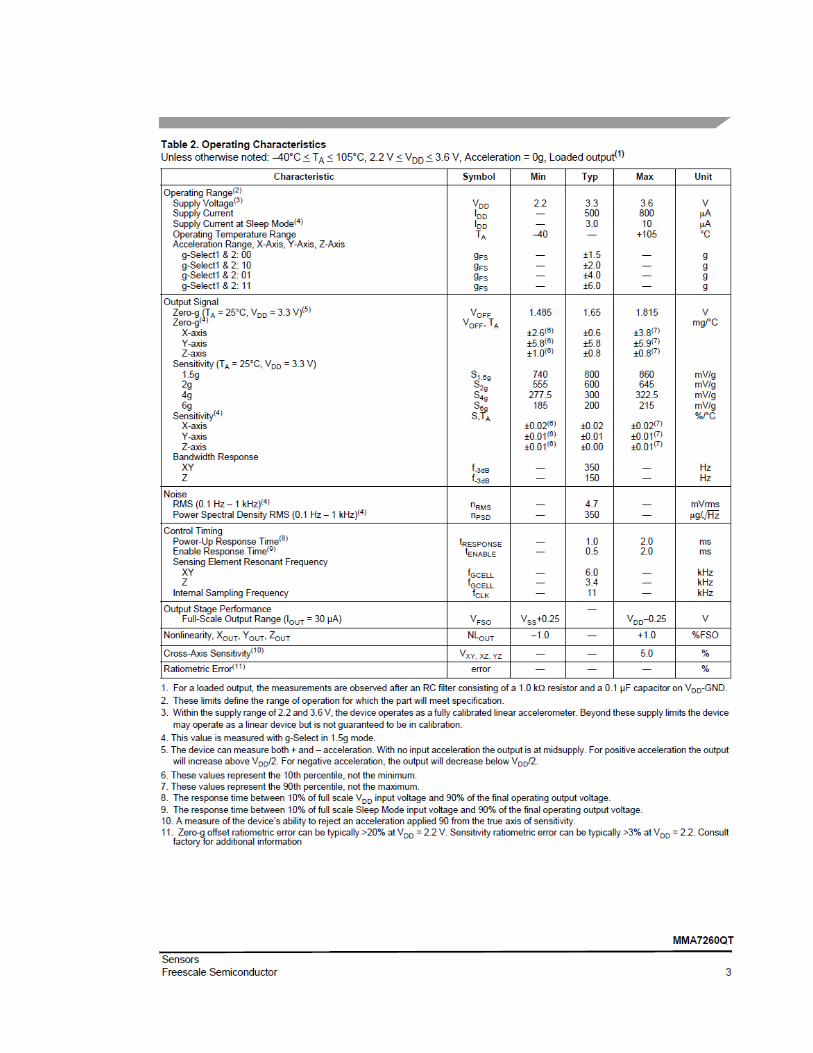
94

95

96

97

98

99
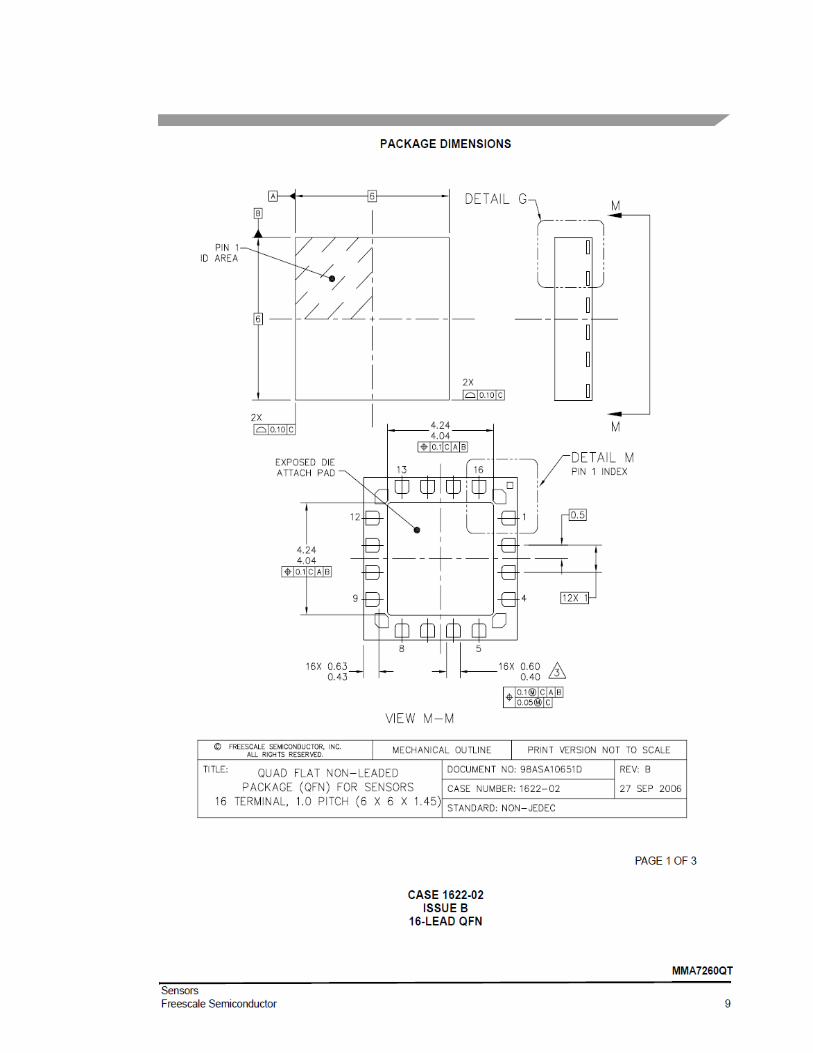
100

101

102

103

104

105
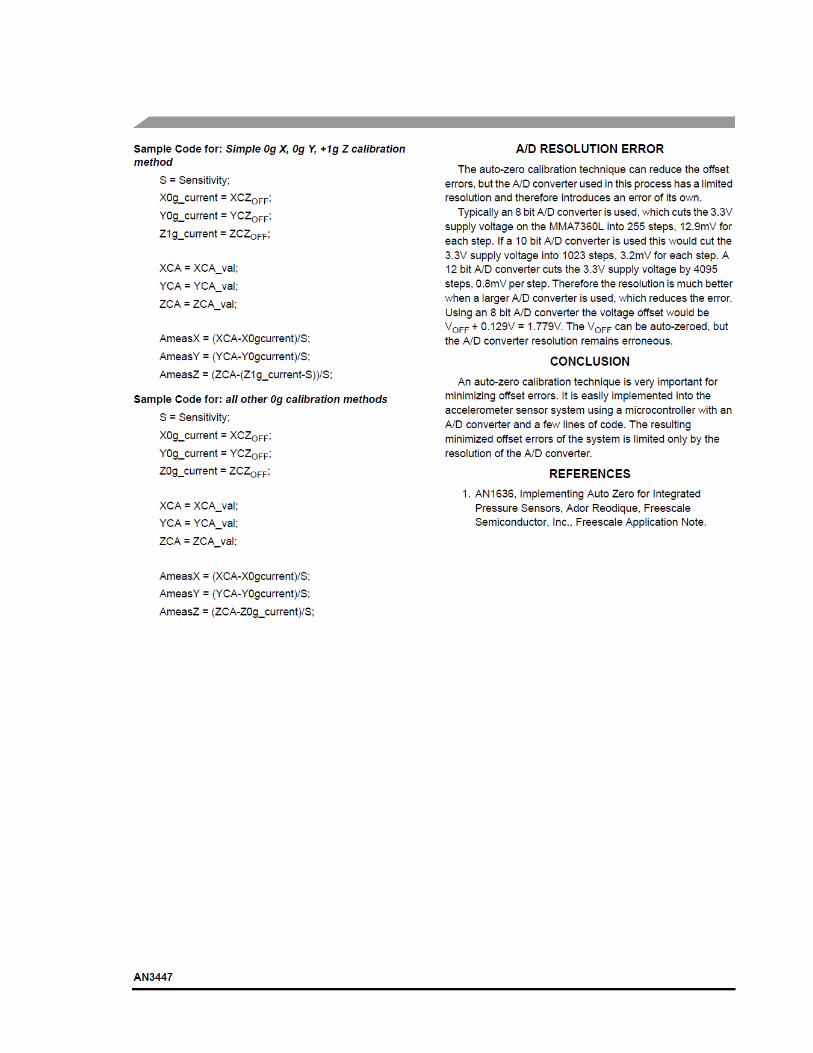
106

107

108

109

110

111

112

113

114

115

116
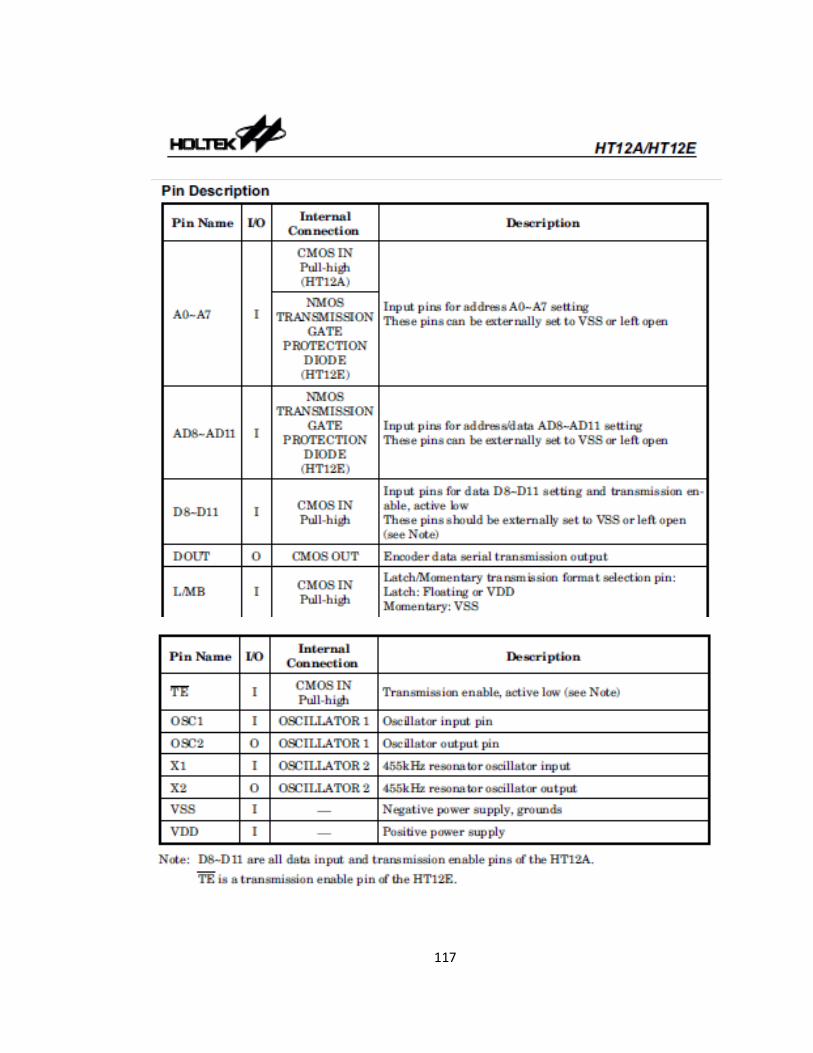
117

118

119

120
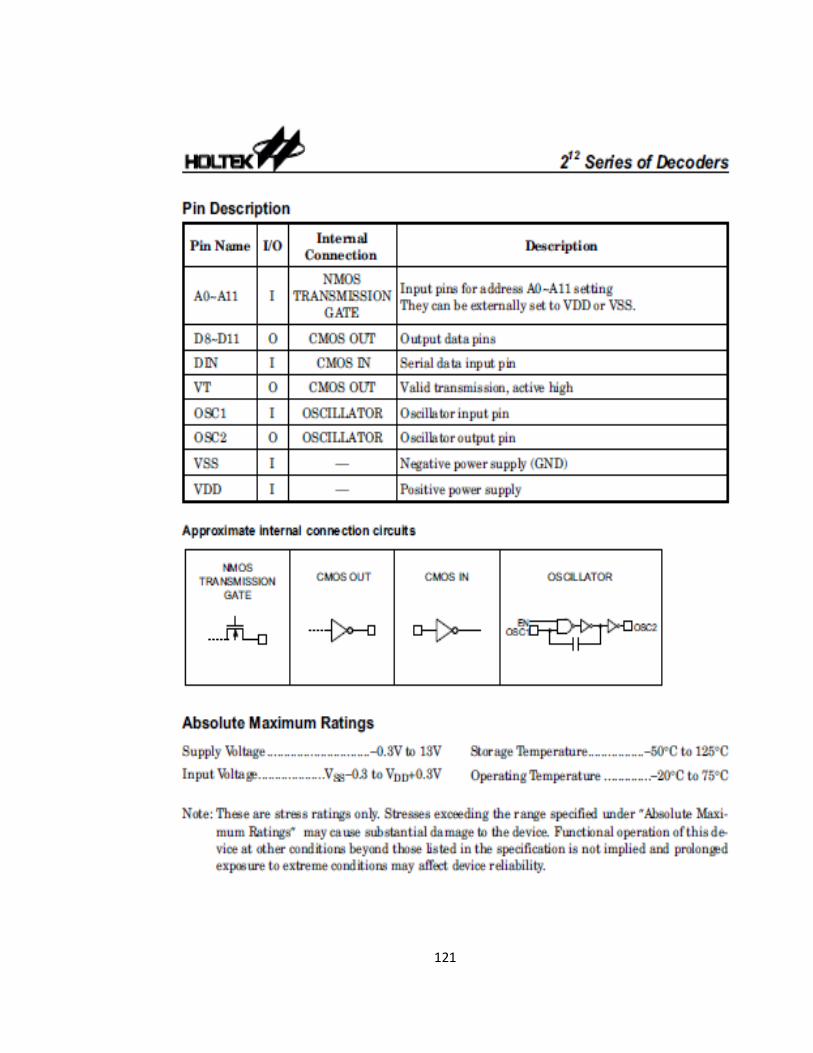
121

122

123
ANEXO B
LÍNEAS DE CÓDIGO
Línea de código del transmisor
#include <16F873A.h>
#include <main.h>
#include <stdlib.h>
#include <math.h>
#include <lcd.h>
#include <laipac.h>
void main()
unsigned int16 lectura;
unsigned int16 res;
unsigned char s[16];
unsigned char c;
// Activar conversor ad
setup_adc_ports(AN0_AN1_AN3);
setup_adc(ADC_CLOCK_INTERNAL);
// Desactivar modulo SPI
setup_spi(SPI_SS_DISABLED);
// Desactivar temporizadores
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1);

124
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DISABLED,0,1);
// Desactivar modulo comparador
setup_comparator(NC_NC_NC_NC);
// Desactivar modulo VRef
setup_vref(FALSE);
// Configurar puertos
set_tris_a(0x0B);
set_tris_b(0x00);
set_tris_c(0x00);
output_a(0x00);
output_b(0x00);
output_c(0x00);
// Inicializar dispositivos
RF_init();
LCD_init();
// Retardo inicial
delay_ms(1000);
//
strcpy(s, " SETUP ");
LCD_write(0x80, s);
strcpy(s, " EJE X ");
LCD_write(0xC0, s);
125
// Leer valor X0
delay_ms(500);
set_adc_channel(0);
delay_us(20);
x0 = read_adc();
delay_ms(1000);
//
strcpy(s, " SETUP ");
LCD_write(0x80, s);
strcpy(s, " EJE Y ");
LCD_write(0xC0, s);
// Leer valor Y0
delay_ms(500);
set_adc_channel(1);
delay_us(20);
y0 = read_adc();
delay_ms(1000);
//
strcpy(s, "X: ");
LCD_write(0x80, s);
strcpy(s, "Y: ");
LCD_write(0xC0, s);
// ciclo de trabajo
c = 0;

126
antes_x = 0;
antes_y = 0;
dir_x = POSITIVO;
dir_y = POSITIVO;
dantes_x = dir_x;
dantes_y = dir_y;
while(TRUE)
/*
c++;
if(c > 15)
c = 1;
Transmitir(c);
*/
// Leer señal X
strcpy(s, " ");
LCD_write(0x80 + 3, s);
set_adc_channel(0);
delay_us(20);
lectura = read_adc();
res = Procesar(lectura, EJE_X);
sprintf(s, "%Lu", res);
LCD_write(0x80 + 3, s);
if(dir_x == NEGATIVO)

127
strcpy(s, "-");
else
strcpy(s, "+");
LCD_write(0x80 + 2, s);
delay_ms(400);
// Leer señal Y
strcpy(s, " ");
LCD_write(0xC0 + 3, s);
set_adc_channel(1);
delay_us(20);
lectura = read_adc();
res = Procesar(lectura, EJE_Y);
sprintf(s, "%Lu", res);
LCD_write(0xC0 + 3, s);
if(dir_y == NEGATIVO)
strcpy(s, "-");
else
strcpy(s, "+");
LCD_write(0xC0 + 2, s);
delay_ms(400);
// fin del programa
unsigned int16 Procesar(unsigned int16 v, unsigned char eje)

128
unsigned int16 vref;
unsigned int16 vval;
unsigned int16 offset;
switch(eje)
case EJE_X: vref = x0; break;
case EJE_Y: vref = y0; break;
vval = v;
offset = 0;
//
if(vval > vref)
dir = 0;
vval = vval - offset;
vval = vval - vref;
else if(vval < vref)
dir = 1;
vval = vval + offset;
vval = vref - vval;

129
else
vval = 0;
// resolucion de 6g = 200 mV/g
if(eje == EJE_X)
vval = CalcularX(vval);
// parar
if(vval < 2)
Transmitir(0x01);
else
// aumenta la velocidad
if(vval > antes_x)
Transmitir(0x0A);
// disminuye la velocidad
else if(vval < antes_x)
Transmitir(0x0B);
// dirección
if(dir == 0)
dir_x = POSITIVO;
Transmitir(0x02);

130
else
dir_x = NEGATIVO;
Transmitir(0x03);
dantes_x = dir_x;
antes_x = vval;
else if(eje == EJE_Y)
vval = CalcularY(vval);
if(vval > 0)
if(dir == 0)
dir_y = POSITIVO;
Transmitir(0x04);
else
dir_y = NEGATIVO;
Transmitir(0x05);

131
antes_y = vval;
dantes_y = dir_y;
return vval;
float Voltaje(unsigned int16 v)
float valor;
valor = v * 5000.0;
valor = valor / 1024;
return valor;
void Transmitir(unsigned char data)
unsigned char i;
for(i=0; i<4; i++)
RF_send(0x00);
delay_ms(12);
RF_send(data);
delay_ms(12);

132
delay_ms(50);
unsigned char CalcularX(unsigned char x)
if(x < 5)
return 0;
else if(x < 10)
return 1;
else if(x < 15)
return 2;
else if(x < 20)
return 3;
else if(x < 25)
return 4;
else if(x < 30)
return 5;
else if(x < 35)
return 6;
else if(x < 40)
return 7;
else if(x < 45)
return 8;
else
return 9;

133
unsigned char CalcularY(unsigned char y)
if(y < 10)
return 0;
else
return 1;
#device adc=10
#FUSES NOWDT, XT, PUT, NOPROTECT, NODEBUG, NOBROWNOUT, NOLVP, NOCPD, NOWRT
#use delay(clock=4000000)
#use fast_io(A)
#use fast_io(B)
#use fast_io(C)
#byte porta=5
#byte portb=6
#byte portc=7
#define EJE_X 1
#define EJE_Y 2
#define POSITIVO 1

134
#define NEGATIVO 2
unsigned int16 x0;
unsigned int16 y0;
unsigned int16 z0;
unsigned char dir;
unsigned char antes_x;
unsigned char antes_y;
unsigned char dir_x;
unsigned char dir_y;
unsigned char dantes_x;
unsigned char dantes_y;
unsigned int16 Procesar(unsigned int16 v, unsigned char eje);
float Voltaje(unsigned int16 v);
void Transmitir(unsigned char data);
unsigned char CalcularX(unsigned char x);
unsigned char CalcularY(unsigned char y);
135
Línea de código del receptor
#include <16F873A.h>
#include <main.h>
#include <laipac.h>
#int_RTCC
// Interrupcion cada 1 ms
void RTCC_isr(void)
cont_tmr0++;
if(cont_tmr0 > 1)
cont_tmr0 = 0;
if(rapidez > 0)
switch(pwm_state)
case PWM_LOW:
cont_pwm--;
if(cont_pwm == 0)
pwm_state = PWM_HIGH;
cont_pwm = pwm_hi;

136
if(state_motor_1 == MOTOR_AD)
output_high(M1_S1);
output_low(M1_S2);
if(state_motor_1 == MOTOR_AT)
output_high(M1_S2);
output_low(M1_S1);
break;
case PWM_HIGH:
cont_pwm--;
if(cont_pwm == 0)
pwm_state = PWM_LOW;
cont_pwm = PWM_MAX - pwm_hi;
output_low(M1_S1);
output_low(M1_S2);
break;
137
if(cont_1 > 0)
cont_1--;
if(cont_1 < 1)
cont_1 = 0;
output_low(M2_S1);
output_low(M2_S2);
state_motor_2 = MOTOR_AD;
if(cont_2 > 0)
cont_2--;
if(cont_2 < 1)
cont_2 = 0;
output_low(M2_S1);
output_low(M2_S2);
state_motor_2 = MOTOR_AT;
138
//clear_interrupt(INT_RTCC);
#int_EXT
// Llego transmisión
void EXT_isr(void)
unsigned char c;
c = input_c() & 0x0F;
Procesar_RX(c);
//output_b(c << 4);
//clear_interrupt(INT_EXT);
void main()
setup_adc_ports(NO_ANALOGS);
setup_adc(ADC_OFF);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_4);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_16,255,1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
ext_int_edge( L_TO_H );

139
// Configurar puertos
set_tris_a(0x00);
set_tris_b(0x01);
set_tris_c(0x0F);
output_a(0x00);
output_b(0x00);
output_c(0x00);
//
rapidez = 1;
pwm_state = PWM_OFF;
cont_tmr0 = 0;
flag_m2 = 0;
cont_1 = 0;
cont_2 = 0;
//
Iniciar_PWM(MOTOR_1);
//
enable_interrupts(INT_RTCC);
enable_interrupts(INT_EXT);
enable_interrupts(GLOBAL);
for(;;)
if(flag_m2 == 1)

140
flag_m2 = 0;
output_high(M2_S1);
output_low(M2_S2);
/*
delay_ms(1000);
output_low(M2_S1);
output_low(M2_S2);
*/
cont_1 = 1000;
if(flag_m2 == 2)
flag_m2 = 0;
output_high(M2_S2);
output_low(M2_S1);
/*
delay_ms(1000);
output_low(M2_S1);
output_low(M2_S2);
*/
cont_2 = 1000;
141
void Iniciar_PWM(unsigned char motor)
cont_pwm = 0;
pwm_hi = 1;
pwm_state = PWM_LOW;
cont_pwm = PWM_MAX - pwm_hi;
void Procesar_RX(unsigned char data)
switch(data)
case 0x01: // Stop
Detener(MOTOR_2);
Detener(MOTOR_1);
break;
case 0x02: // Adelante
Detener(MOTOR_2);
Adelante(MOTOR_1);
break;
case 0x03: // Atras
142
Detener(MOTOR_2);
Atras(MOTOR_1);
break;
case 0x04: // Izquierda
Detener(MOTOR_1);
Adelante(MOTOR_2);
break;
case 0x05: // Derecha
Detener(MOTOR_1);
Atras(MOTOR_2);
break;
case 0x06: // Adelante Izquierda
Adelante(MOTOR_1);
Adelante(MOTOR_2);
break;
case 0x07: // Adelante Derecha

143
Adelante(MOTOR_1);
Atras(MOTOR_2);
break;
case 0x08: // Atras Izquierda
Atras(MOTOR_1);
Adelante(MOTOR_2);
break;
case 0x09: // Atras Derecha
Atras(MOTOR_1);
Atras(MOTOR_2);
break;
case 0x0A:
Velocidad(MOTOR_1, 1);
break;
case 0x0B:

144
Velocidad(MOTOR_1, 2);
break;
case 0x0C:
Velocidad(MOTOR_1, 3);
break;
case 0x0D:
Velocidad(MOTOR_1, 4);
break;
case 0x0E:
Velocidad(MOTOR_1, 5);
break;
void Detener(unsigned char motor)
switch(motor)

145
case MOTOR_1:
output_low(M1_S1);
output_low(M1_S2);
pwm_state = PWM_OFF;
pwm_hi = 1;
state_motor_1 = MOTOR_OFF;
break;
case MOTOR_2:
output_low(M2_S1);
output_low(M2_S2);
state_motor_2 = MOTOR_OFF;
break;
void Adelante(unsigned char motor)
switch(motor)
146
case MOTOR_1:
//output_high(M1_S1);
//output_low(M1_S2);
if(pwm_state == PWM_OFF)
Iniciar_PWM(motor);
state_motor_1 = MOTOR_AD;
break;
case MOTOR_2:
flag_m2 = 1;
break;
void Atras(unsigned char motor)
switch(motor)

147
case MOTOR_1:
//output_low(M1_S1);
//output_high(M1_S2);
if(pwm_state == PWM_OFF)
Iniciar_PWM(motor);
state_motor_1 = MOTOR_AT;
break;
case MOTOR_2:
flag_m2 = 2;
break;
void Velocidad(unsigned char motor, unsigned char data)
switch(motor)
case MOTOR_1:

148
switch(data)
case 1:
if(pwm_hi < (PWM_MAX-1))
pwm_hi++;
break;
case 2:
if(pwm_hi > 1)
pwm_hi--;
break;
break;
case MOTOR_2:

149
break;
#device adc=10
#FUSES NOWDT, XT, PUT, NOPROTECT, NODEBUG, NOBROWNOUT, NOLVP, NOCPD, NOWRT
#use delay(clock=4000000)
#use fast_io(A)
#use fast_io(B)
#use fast_io(C)
#byte porta=5
#byte portb=6
#byte portc=7
#define MOTOR_1 1
#define MOTOR_2 2
#define M1_S1 PIN_B7
#define M1_S2 PIN_B6
#define M2_S1 PIN_B5
#define M2_S2 PIN_B4

150
#define PWM_MAX 16
#define PWM_HIGH 1
#define PWM_LOW 2
#define PWM_OFF 0
#define MOTOR_OFF 0
#define MOTOR_AD 1
#define MOTOR_AT 2
unsigned char cont_tmr0;
unsigned char pwm_hi;
unsigned char cont_pwm;
unsigned char rapidez;
unsigned char pwm_state;
unsigned char state_motor_1;
unsigned char state_motor_2;
unsigned char flag_m2;
unsigned int16 cont_1;
unsigned int16 cont_2;
void Iniciar_PWM(unsigned char motor);
void Procesar_RX(unsigned char data);
void Detener(unsigned char motor);

151
void Adelante(unsigned char motor);
void Atras(unsigned char motor);
void Velocidad(unsigned char motor, unsigned char data);

152
ANEXO C
TARJETAS Y MONTAJES
Diagrama del circuito impreso del control remoto
Tarjeta armada control remoto

153
Diagrama del circuito impreso del vehículo

154
Tarjeta armada vehículo (receptor).