dinamica de sistemas: estudio de las equaciones de lorenz
TRANSCRIPT

Ariadna Rius Soler
ETIG
EUPMT
Tardor 2010
Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions
Introducció
Endinsar-se en el camp dels sistemes dinàmics caòtics
Estudiant les equacions de Lorenz com a origen del
caos.
Adquirint els coneixements previs.
Acotant l’estudi a 5 propietats.
Conformant una visió general de la dinàmica del
sistema.
Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions

Anàlisi inicial del projecte
Què sé?
Què haig de saber?
Per què?
Com?
Quines eines utilitzaré?
Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions
Coneixements bàsics
Forma canònica de Jordan
Equacions diferencials
Sistemes d’equacions diferencials
Mètodes per simplificar sistemes dinàmics
Bifurcacions
Mètode Runge-Kutta
Comportament caòtic
Atractors
Forma canònica de Jordan(I)
Autovalors:
Per tant, donat un endomorfisme f de matriu associada A, un
escalar λ és un autovalor de f, si i només si, det(A- λI) =0.
Polinomi característic:
És un polinomi de
grau n p(λ) tal que:
Els autovalors de f seran les arrels del polinomi característic
Coneixements bàsics,

Forma canònica de Jordan(II)
Forma canònica de Jordan:
Serveix per trobar una forma de la matriu amb el
màxim de zeros possibles.
S’utilitza per resoldre sistemes d’equacions diferencials
lineals.
Consisteix en trobar la forma canònica de Jordan
(matriu J) tal que , on P és la matriu de pas i
tal que .
Coneixements bàsics,

Equacions Diferencials(I)
Una equació diferencial és una equació funcional on la
funció incògnita està derivada una o més vegades.
Si l’equació diferencial només conté una variable
independent s’anomena equació diferencial ordinària
(EDO), si en conté més d’una, s’anomena equació
diferencial en derivades parcials.
L’odre d’una equació diferencial és l’odre més gran de
la/les derivada/es que conté.
Les anomenades EDOs autònomes són aquelles on no
apareix explícitament la variable t (temps).
Coneixements bàsics,

Equacions Diferencials(II)
El grau d’aquesta mena d’expressions pot ser lineal o no
lineal. En el primer cas la variable dependent i totes les
seves derivades són de primer grau. A més a més, cada
coeficient de la variable dependent i les seves derivades
depenen únicament de la variable independent. Si no es
compleixin aquestes dues propietats es tractarà del cas no
lineal.
Coneixements bàsics,
Equacions Diferencials(III)
Solucions d’una EDO:
No es pot considerar la solució d’una EDO sense tenir en
compte l’interval I, al qual es pot fer referència amb varis
noms com interval de definició, interval d’existència o
domini de la solució.
Coneixements bàsics,
Equacions Diferencials(IV)
Solucions d’una EDO, tres menes:
Solució general: Expressió d’ordre n qualsevol que conté n
constants arbitràries corresponents a n constants
d’integració.
Solució particular: És un tipus de solució general que està
parametritzada en donar uns valors determinats a les
constants arbitràries.
Solució singular: Qualsevol expressió que, essent solució,
no prové de la solució general.
Coneixements bàsics,

Equacions Diferencials(V)
Solucions d’una EDO:
Geomètricament, la solució general representa una família
de corbes, mentre que la solució particular és una d’aquestes
corbes. La solució singular no correspon a cap membre
d’aquesta família.
Si x(t) = (x1(t), x2(t),...,xn(t)) és solució d’una EDO:
Coneixements bàsics,
Equacions Diferencials(VI)
Solucions d’una EDO:
Per calcular la solució particular es requereixen les
condicions inicials del problema.
El nombre de condicions inicials necessàries és igual a l’ordre
de l’equació diferencial.
Si s’analitza x’ = f(x) des d’un punt de vista geomètric,
s’interpreta que la funció f defineix un camp vectorial, que
pot ser autònom o no.
f associa una direcció f(x) a cada punt (x). Determinar la
solució de l’EDO per les condicions inicials (x0) equival a
calcular la corba que passa pel punt i que té pendent f’(x0).
Coneixements bàsics,
Equacions Diferencials(VII)
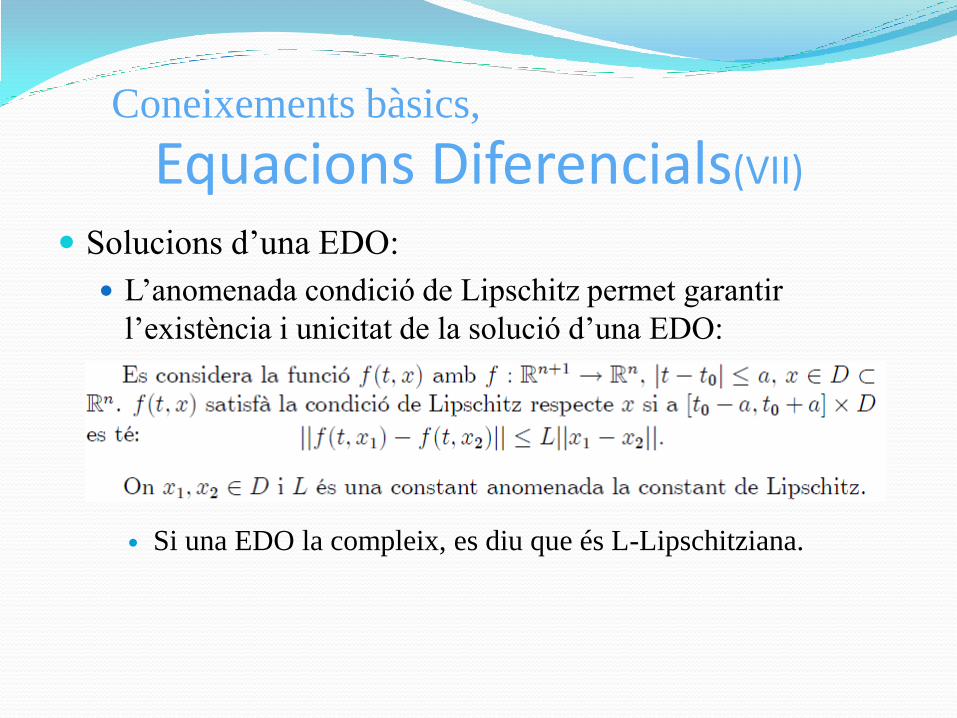
Solucions d’una EDO:
L’anomenada condició de Lipschitz permet garantir
l’existència i unicitat de la solució d’una EDO:
Si una EDO la compleix, es diu que és L-Lipschitziana.
Coneixements bàsics,
Equacions Diferencials(VIII)
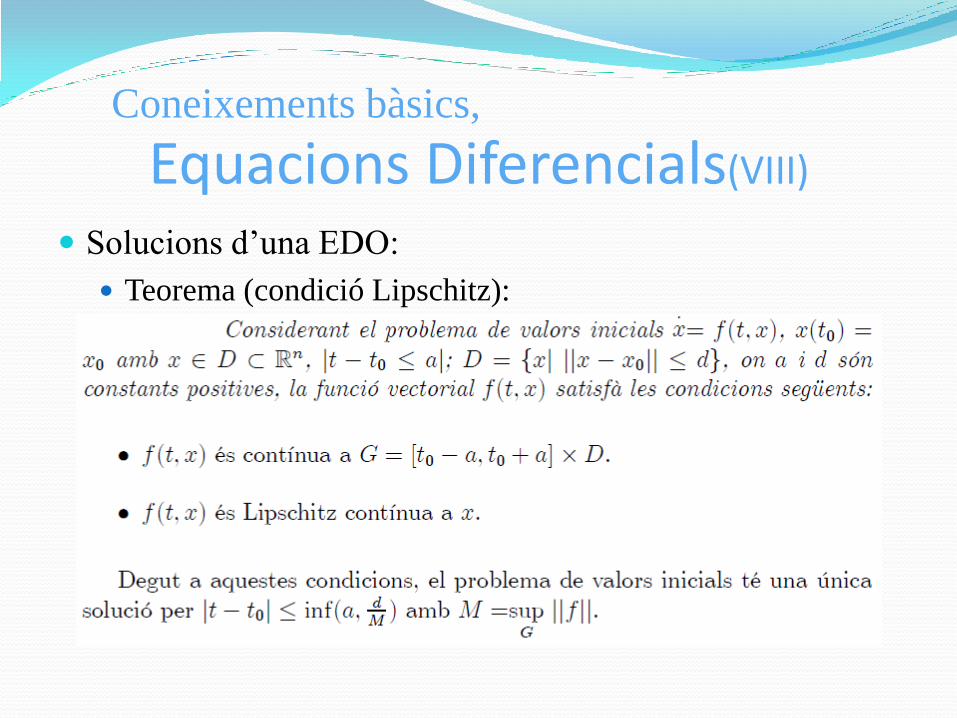
Solucions d’una EDO:
Teorema (condició Lipschitz):
Coneixements bàsics,

Equacions Diferencials(IX)
Punts fixes i estabilitat:
Els punts fixes, també anomenats d’equilibri o zeros, són
una classe important de solucions d’una equació diferencial
que es defineixen per .
Un punt fix és estable si una solució x(t) es manté propera
a ell per qualsevol temps.
Per tant, és estable si per un entorn V en U, , hi ha un
entorn , tal que cada solució x(x0,t) amb està
definida i es troba a V per tot t > 0.
Si el punt fix és estable i és tal que x(t)→ quan t →∞, es
diu que és asimptòticament estable.
Coneixements bàsics,

Equacions Diferencials(X)
Punts fixes i estabilitat:
Estabilitat i estabilitat asimptòtica:
Aquests anàlisis són locals.
Coneixements bàsics,

Equacions Diferencials(XI)
Punts fixes i estabilitat:
Per determinar l’estabilitat global i la local s’utilitza
l’anomenada funció de Liapunov.
Que permet estudiar l’EDO sense solucionar-la.
No existeix un mètode general que permeti trobar la funció de
Liapunov adequada per cada cas concret, però és una bona
candidata a l’hora d’atacar problemes de mecànica i energia.
El mètode consisteix en trobar una funció positiva i definida
que decreixi al llarg de les corbes solució de l’equació
diferencial. Aquesta funció és la funció Liapunov:
Coneixements bàsics,
Equacions Diferencials(XII)
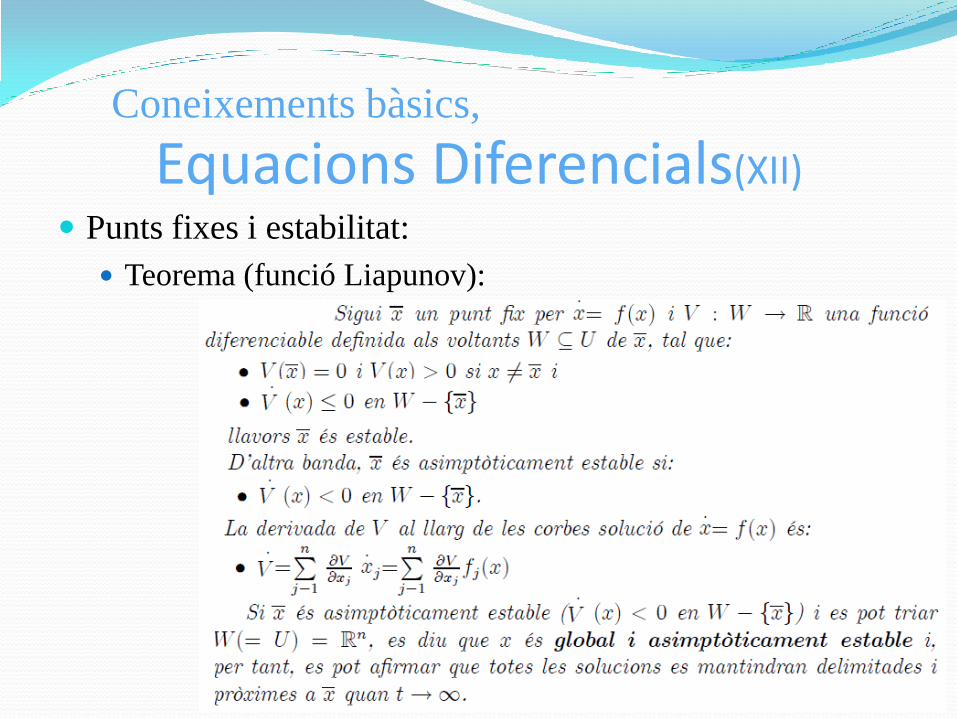
Punts fixes i estabilitat:
Teorema (funció Liapunov):
Coneixements bàsics,

Sistemes d’EDOs (I)
Sistemes lineals:
Es considera el sistema lineal on A és una matriu n×n
amb coeficients constants i . Una solució del sistema
depèn del temps t i de la condició inicial .
Per tant una solució del problema de valors inicials és .
Que és equivalent a , on és la matriu n×n obtinguda fent
l’exponencial d’A i està definida per les sèries convergents:
Una solució general de es pot obtenir mitjançant la
superposició lineal de n solucions lineals i independents.
és la matriu solució fonamental que té
aquests n solucions per columnes.
Coneixements bàsics,
Sistemes d’EDOs (II)
Sistemes lineals:
Es considera el sistema lineal on A és una matriu n×n
amb coeficients constants i . Una solució del sistema
depèn del temps t i de la condició inicial .
.
també es pot solucionar cercant una transformada
invertible P que la diagonalitzi o que la modifiqui de manera
que resulti la forma normal de Jordan.
es pot tractar com .
Coneixements bàsics,

Sistemes d’EDOs (III)
Fluxos i subespais invariants:
La matriu es pot considerar com una aplicació de en .
El flux es pot considerar com el conjunt de
totes les solucions de .
Dins d’aquest conjunt cal destacar les que es troben en subespais
lineals conformats pels autovectors.
Aquests subespais són invariants sota .
Coneixements bàsics,
Sistemes d’EDOs (IV)
Fluxos i subespais invariants:
Tres classes de subespais:
Subespai estable: .
són els ns autovectors, els autovalors dels quals tenen parts
reals i negatives.
Presenta creixement exponencial.
Subespai inestable: .
són els nu autovectors, els autovalors dels quals tenen parts
reals i positives.
Presenta decreixement exponencial.
Subespai centre: .
són els nc autovectors, els autovalors dels quals tenen parts
reals zero.
Coneixements bàsics,
Sistemes d’EDOs (V)
Sistemes no lineals:
La immensa majoria són irresolubles.
La linealització permet obtenir un sistema lineal d’un no
lineal.
A través de l’estudi d’aquest sistema lineal és possible
caracteritzar el comportament de les solucions a prop dels punts
fixes.
Però és una aproximació!
Coneixements bàsics,

Sistemes d’EDOs (VI)
Sistemes no lineals:
Donat el sistema no lineal que té com a punt fix:
Es pot caracteritzar el comportament de les solucions a prop
d’aquest punt linealitzant el sistema inicial i estudiant el sistema
lineal obtingut: , on és la
matriu Jacobiana de la primera derivada parcial de la funció
(T denota transposició) i .
Coneixements bàsics,

Sistemes d’EDOs (VII)
Sistemes no lineals:
Caracteritzar el comportament de les solucions a prop del punt
fix linealitzant el sistema inicial i estudiant el sistema lineal
obtingut:
Teorema (Hartman-Grobman)
Quan un punt fix no té autovalors amb part real zero, s’anomena hiperbòlic.
El comportament asimptòtic de les solucions properes a ell està
determinat per la linearització.
Coneixements bàsics,

Sistemes d’EDOs (VIII)
Sistemes no lineals:
Varietats locals:
Tenen anàlegs globals.
Teorema 6:
Coneixements bàsics,
Mètodes per simplificar sistemes dinàmics(I)
Formes normals:
El mètode de les formes normals proporciona una via per
trobar un sistema de coordenades, en el qual el sistema
dinàmic pren la forma més simple.
El mètode és local en el sentit que les transformacions de
coordenades estan generades en un dels voltants d’una
solució coneguda (un punt fix).
En general, les transformacions de coordenades seran
funcions no lineals de les variables dependents. Aquestes
transformacions es troben resolent una sèrie de problemes
lineals.
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(II)
Formes normals:
L’estructura de la forma normal està completament
determinada per la naturalesa de la part lineal del camp
vectorial.
Serveix tant per camps vectorials com per aplicacions.
Els camps vectorials poden tenir varies dimensions i
paràmetres.
Passos generals:
Transformar el punt fix en l’origen.
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(III)
Formes normals:
Passos generals:
Separar la part lineal i escriure-la amb la forma canònica
de Jordan.
Simplificar la part no lineal.
Expandint amb el mètode de Taylor.
Transformant les coordenades.
Simplificant els termes de cada ordre.
Coneixements bàsics,
Mètodes per simplificar sistemes dinàmics(IV)
Varietats centrals:
La teoria de la varietat central consisteix en focalitzar
l’estudi del comportament de les solucions al voltant
d’un punt fix determinat.
S’aplica a l’estudi de l’estabilitat dels punts fixes no
hiperbòlics, tant de camps vectorials com d’aplicacions.
Els camps vectorials poden estar en funció de paràmetres.
Pot incloure direccions linealment inestables.
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(V)
Varietats centrals per camps vectorials:
Es consideren els camps vectorials:
on
A és una matriu c×c que té autovalors amb part real zero.
B és una matriu s×s que té autovalors amb parts reals i
negatives.
Les funcions f i g són de classe C^r (r≥2).
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(VI)
Varietats centrals per camps vectorials:
Definició:
Coneixements bàsics,
Mètodes per simplificar sistemes dinàmics(VII)
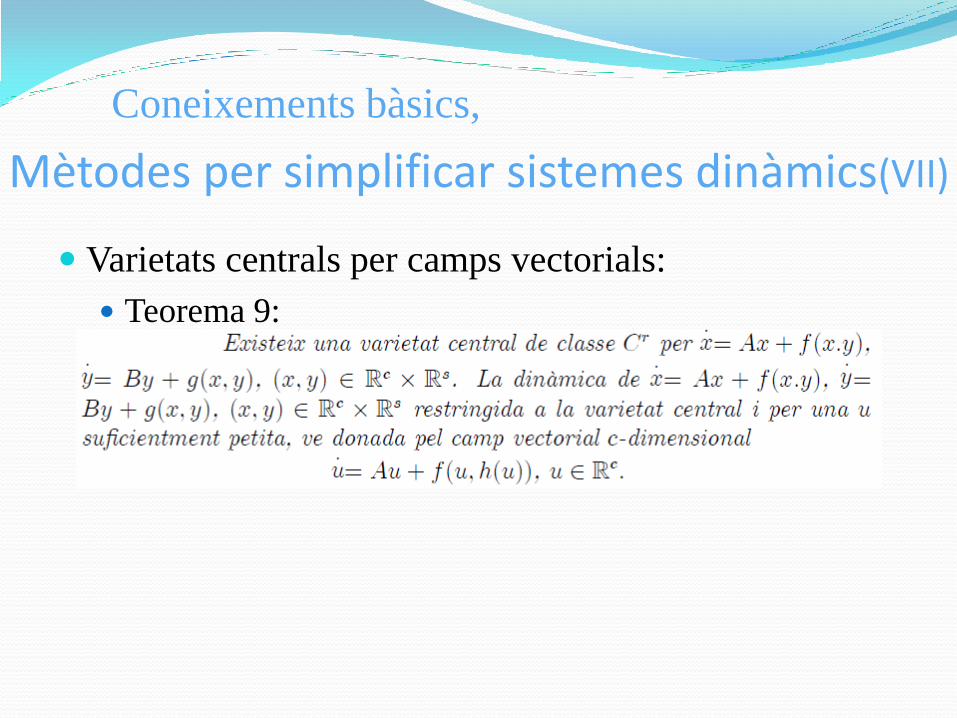
Varietats centrals per camps vectorials:
Teorema 9:
Coneixements bàsics,
Mètodes per simplificar sistemes dinàmics(VIII)
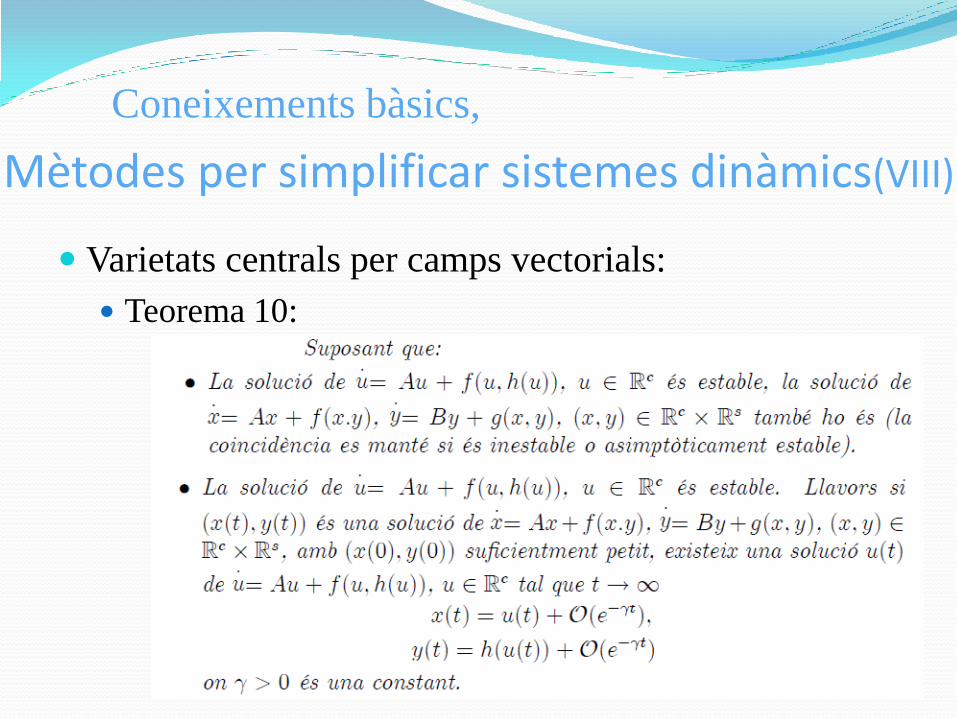
Varietats centrals per camps vectorials:
Teorema 10:
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(IX)
Varietats centrals per camps vectorials:
Per aprofitar les propietats del teorema 10, la varietat central
es calcula de la manera següent:
És
per una δ suficientment petita.
Utilitzant la invariància de sota la dinàmica dels camps
vectorials inicials, es derivarà una equació diferencial en
derivades parcials i quasilineal que ha d’estar satisfeta per h(x).
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(X) Varietats centrals per camps vectorials:
Per aprofitar les propietats del teorema 10, la varietat central
es calcula de la manera següent:
Es complirà:
Coneixements bàsics,
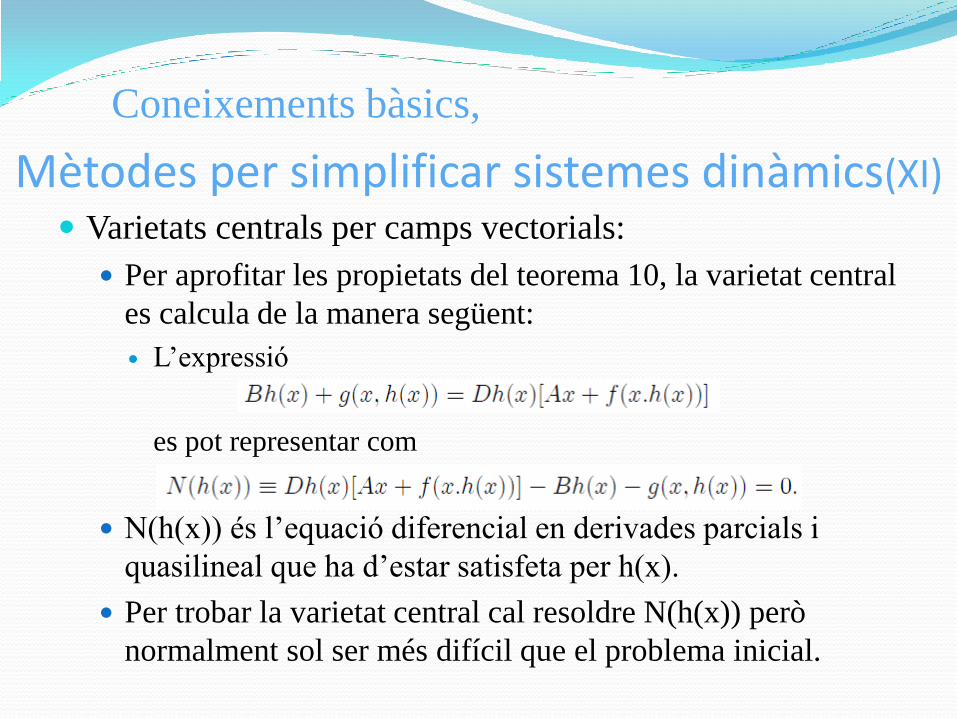
Mètodes per simplificar sistemes dinàmics(XI) Varietats centrals per camps vectorials:
Per aprofitar les propietats del teorema 10, la varietat central
es calcula de la manera següent:
L’expressió
es pot representar com
N(h(x)) és l’equació diferencial en derivades parcials i
quasilineal que ha d’estar satisfeta per h(x).
Per trobar la varietat central cal resoldre N(h(x)) però
normalment sol ser més difícil que el problema inicial.
Coneixements bàsics,

Mètodes per simplificar sistemes dinàmics(XII)
Varietats centrals per camps vectorials:
El teorema següent proporciona una mètode per
calcular N(h(x)) d’una manera aproximada:
Teorema 11:
Encara que existeixi la varietat central, no té perquè ser
única.
Coneixements bàsics,
Bifurcacions(I)
Una bifurcació és un canvi brusc del comportament al
llarg d’un sistema
que es produeix quan el valor d’una constant passa de
ser inferior a ser superior que un determinat valor crític.
Dos tipus:
Locals: succeeixen a les proximitats d’un punt fix.
Globals: involucren zones extenses, més enllà de les
proximitats dels punts fixos.
Coneixements bàsics,
Bifurcacions(II)
Els autovalors del sistema linealitzat poden indicar
que hi ha bifurcacions.
Quan el punt és no hiperbòlic aquesta informació pot
ser inexacta o errònia i cal utilitzar altres mètodes per
estudiar-les:
Varietats centrals.
Forma normal.
Quan les bifurcacions són globals no es poden estudiar
amb anàlisis locals ni amb la matriu linealitzada.
Coneixements bàsics,
Bifurcacions(III)
Hi ha bifurcacions globals que emergeixen de les
locals:
Si els autovalors són:
Dos autovalors zero.
Un autovalor zero i un parell purament imaginaris.
Coneixements bàsics,
Bifurcacions(IV)
Les bifurcacions locals més freqüents:
Un autovalor zero:
Punt de sella.
De forquilla.
Transcrítica.
Un parell d’autovalors purament imaginaris:
De (Poincaré-Andronov-)Hpof.
Coneixements bàsics,
Bifurcacions(V)
Bifurcació de forquilla:
Per determinar el tipus de bifurcació s’estudia la geometria
de la corba (o les cobres) dels punts fixes, en aquest cas:
Dues corbes dels punts fixes passen a través de (x,μ)=(0,0), una
ve donada per x=0 i l’altre per μ=x^2.
La corba x=0 existeix a ambdós costats de μ=0, mentre que la
corba proporcionada per μ=x^2 només existeix a un dels
costats de μ=0.
El tipus d’estabilitat dels punts fixes de la corba x=0 és diferent
a cada costat de μ=0. Els punts fixes de μ=x^2 sempre tenen el
mateix tipus d’estabilitat.
Coneixements bàsics,
Bifurcacions(VI)
Bifurcació de forquilla:
Es considera el camp vectorial parametritzat:
on g és una funció C^r definida per un conjunt obert en
Es suposa que el camp vectorial té un punt fix a:
I la seva linealització és:
Coneixements bàsics,
Bifurcacions(VII)
Bifurcació de forquilla:
Com que el punt fix és no hiperbòlic, l’estructura de l’òrbita
a prop de està determinada per l’equació de la varietat
central associada:
on satisfà
Per tal que es tingui una bifurcació de tipus forquilla cal
que:
Coneixements bàsics,
Bifurcacions(VIII)
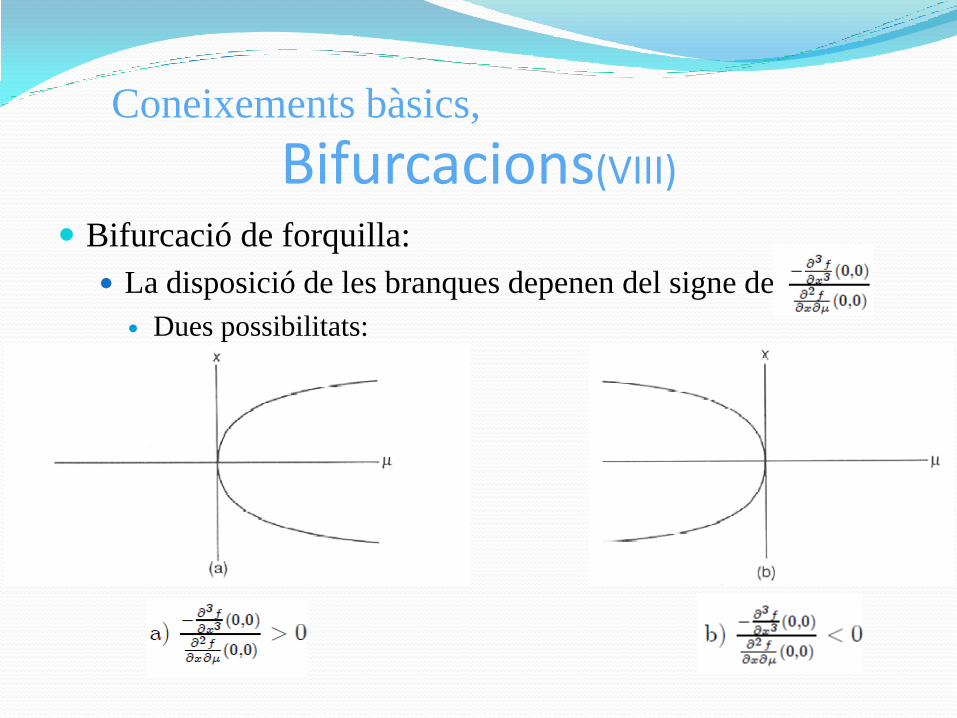
Bifurcació de forquilla:
La disposició de les branques depenen del signe de
Dues possibilitats:
Coneixements bàsics,

Bifurcacions(IX)
Bifurcació de forquilla:
Les condicions esmentades impliquen que l’estructura de
l’òrbita a prop de (x,μ)=(0,0) és qualitativament la mateixa
que la propera a (x,μ)=(0,0) per
Aquest camp vectorial es pot veure com la forma normal per
bifurcacions de forquilla.
Coneixements bàsics,

Mètode Runge-Kutta(I)
S’utilitza el de 4 passos (RK4).
A partir del mètode de la sèrie de Taylor s’obté un
sistema d’equacions que acaba donant la formula
recursiva:
amb
Coneixements bàsics,

Mètode Runge-Kutta(II)
Amb la formula es van calculant aproximacions dels
punts.
Cal proporcionar el primer punt.
Permet avaluar les expressions sense calcular les
derivades.
Adaptacions:
Mida de pas h.
Representar-hi vectors.
Coneixements bàsics,
Comportament Caòtic Té aspecte de quelcom aleatori.
Encara que no ho sigui.
Dependència hipersensible de les condicions inicials.
No periodicitat.
Determinisme.
Coneixements bàsics,

Atractors(I)
En un sistema dinàmic.
Triant qualssevol valors inicials de les variables, al cap d’un
temps hi haurà nombres, o combinacions de números, que
poden no aparèixer.
Els estats que es produeixen, després de la desaparició de
qualssevol efectes temporals que poden haver-se introduït
en escollir les condicions inicials, formaran part del conjunt
d’atractors.
Per tant, els atractors són els estats del sistema que es
produeixen.
Coneixements bàsics,
Atractors(II)
En un sistema, i per un temps suficientment gran, els
estats que no estan molt propers a l’atractor podrien
no existir, ja que no es produiran mai.
Des del punt de vista gràfic:
L’espai de n dimensions en el qual és possible dibuixar les
gràfiques del sistema n-dimensional que s’està analitzant
s’anomena espai de fase.
En aquest espai cada punt representa un estat concret d’un
sistema dinàmic i les coordenades del punt són
numèricament iguals als valors que assumeixen les variables
quan es produeix aquest estat.
Coneixements bàsics,

Atractors(III)
Des del punt de vista gràfic:
Una solució particular del sistema es representa
mitjançant una corba i s’anomena òrbita si el sistema és
un flux.
Un punt és un estat del sistema i una òrbita una
seqüència cronològica d’estats.
Per tant, un atractor pot ser:
Un conjunt de punts.
Quan l’aglomeració està formada per peces inconnexes i no
hi ha una òrbita que les uneixi, cada peça és un atractor.
Un punt.
Coneixements bàsics,
Atractors(IV)
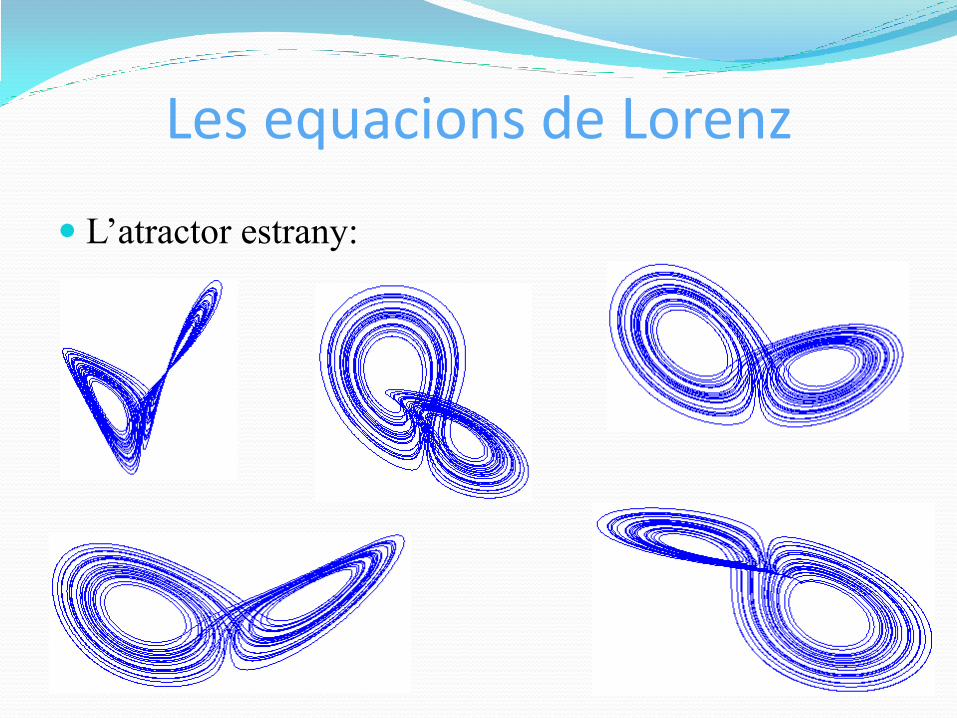
L’atractor estrany:
És un atractor que consisteix en un nombre infinit de corbes,
superfícies o que està conformat de més dimensions i que
presenta un buit entre dos membres qualssevol del conjunt.
És el cor del caos.
En la majoria de sistemes no es poden donar valors
extremadament grans de les variables, excepte en condicions
transitòries, els punts del conjunt d’atractors no poden estar
molt allunyats de l’origen
Coneixements bàsics,

Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions
Les equacions de Lorenz
Edward N. Lorenz era un matemàtic i meteoròleg que
va realitzar grans aportacions a la teoria del caos.
Els seus estudis sobre previsions meteorològiques el
van portar a formular un model simple però que va
acabar responent a una dinàmica molt complexa.
El seu model presenta un comportament caòtic.
Les equacions de Lorenz sorgeixen del les equacions
bàsiques del moviment d’un fluid convectiu.

Les equacions de Lorenz
La idea inicial és estudiar el comportament d’una capa
de fluid emplaçada entre dues superfícies planes i
paral·leles, separades per una distància h.
Si s’escalfa homogèniament per la part inferior, es
produirà un transport, en principi per conducció, de
calor entre aquesta superfície i la de sobre.
Però si aquesta diferència augmenta es produirà un nou
fenomen d’autoorganització: el fluid presenta transport
convectiu i es dóna l’organització espacial en forma de
rotllos convectius.
Les equacions de Lorenz
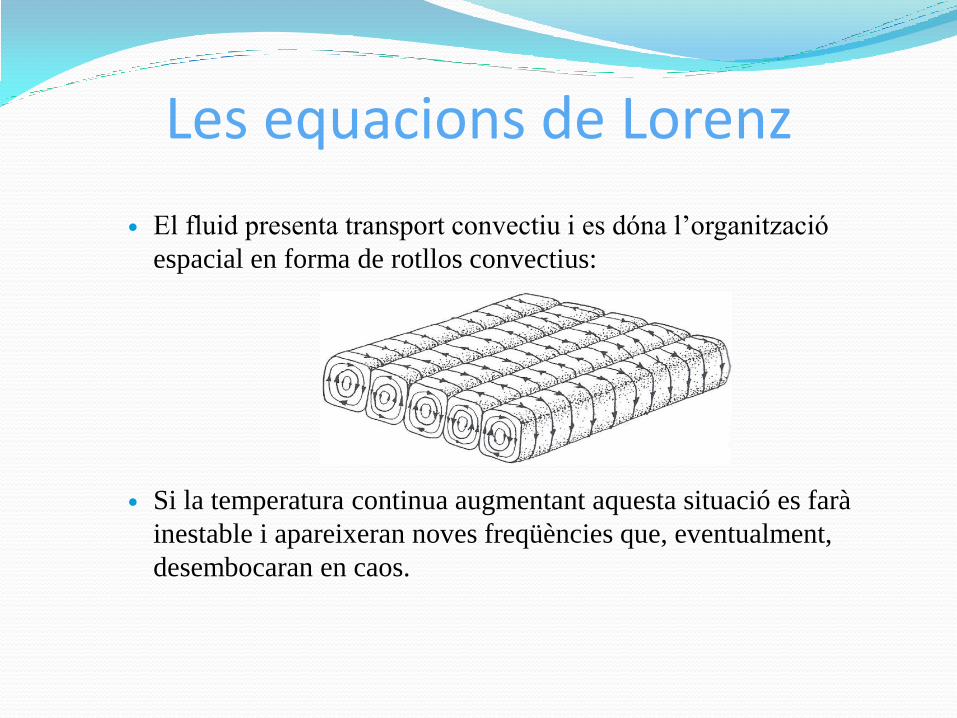
El fluid presenta transport convectiu i es dóna l’organització
espacial en forma de rotllos convectius:
Si la temperatura continua augmentant aquesta situació es farà
inestable i apareixeran noves freqüències que, eventualment,
desembocaran en caos.
Les equacions de Lorenz
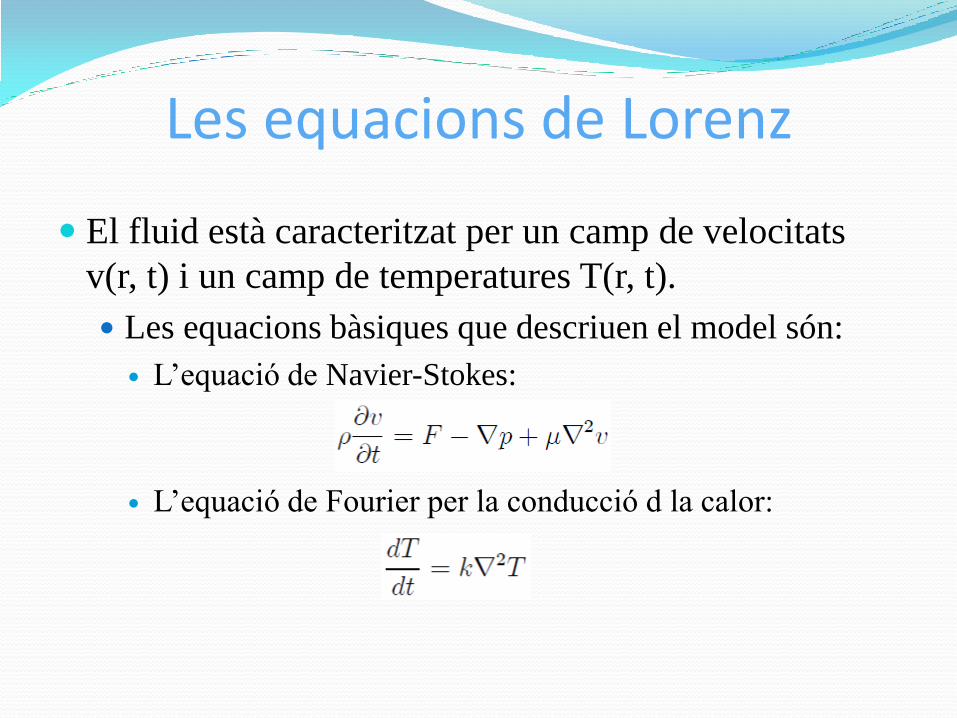
El fluid està caracteritzat per un camp de velocitats
v(r, t) i un camp de temperatures T(r, t).
Les equacions bàsiques que descriuen el model són:
L’equació de Navier-Stokes:
L’equació de Fourier per la conducció d la calor:
Les equacions de Lorenz
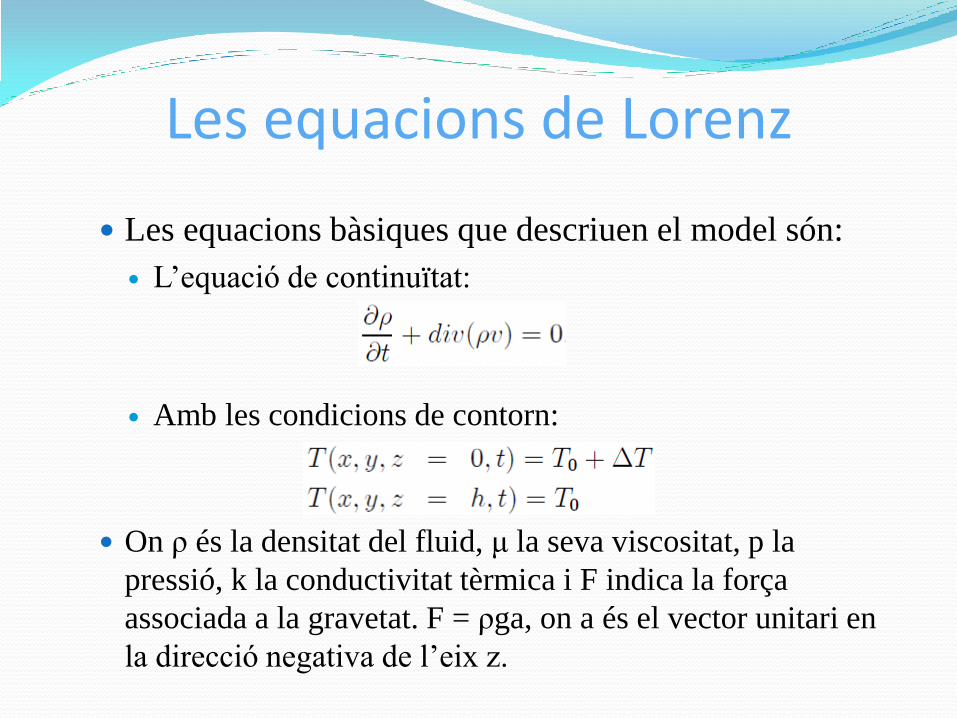
Les equacions bàsiques que descriuen el model són:
L’equació de continuïtat:
Amb les condicions de contorn:
On ρ és la densitat del fluid, μ la seva viscositat, p la
pressió, k la conductivitat tèrmica i F indica la força
associada a la gravetat. F = ρga, on a és el vector unitari en
la direcció negativa de l’eix z.
Les equacions de Lorenz
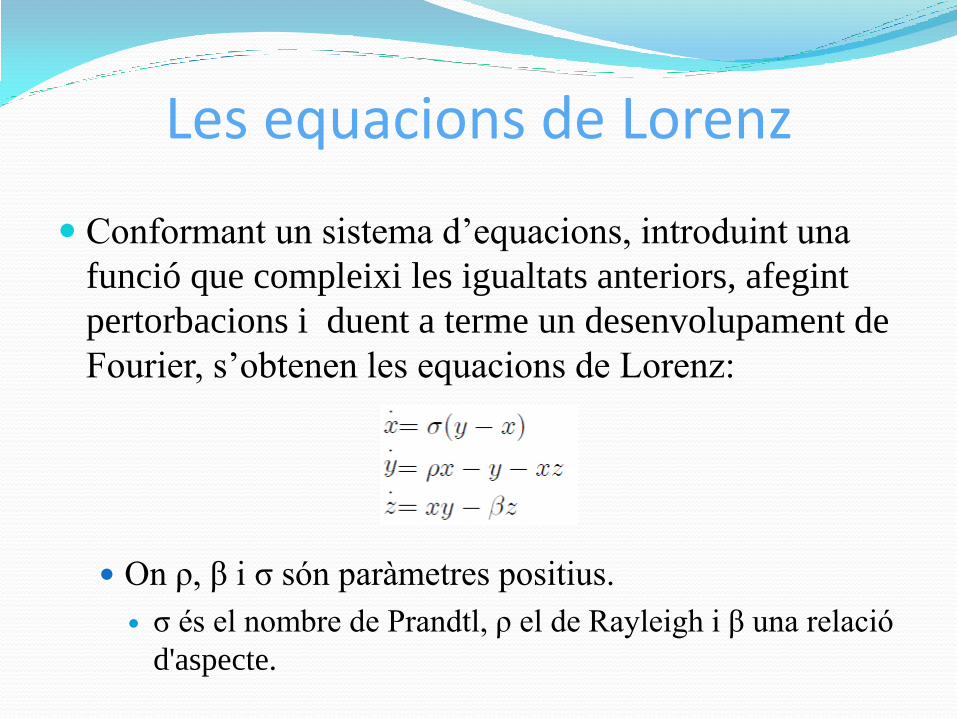
Conformant un sistema d’equacions, introduint una
funció que compleixi les igualtats anteriors, afegint
pertorbacions i duent a terme un desenvolupament de
Fourier, s’obtenen les equacions de Lorenz:
On ρ, β i σ són paràmetres positius.
σ és el nombre de Prandtl, ρ el de Rayleigh i β una relació
d'aspecte.
Les equacions de Lorenz
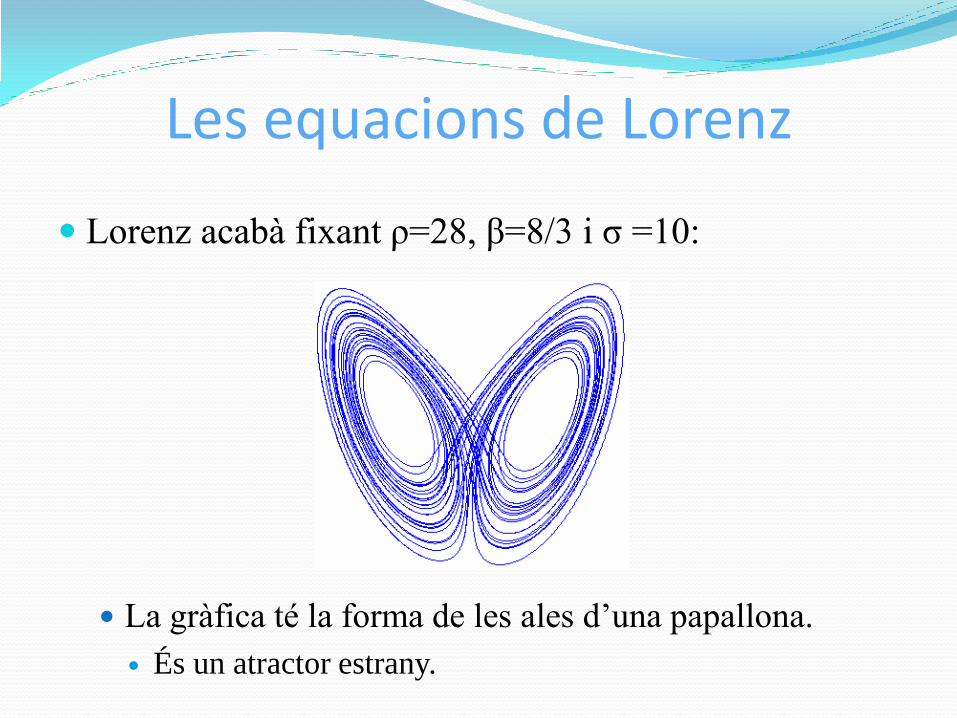
Lorenz acabà fixant ρ=28, β=8/3 i σ =10:
La gràfica té la forma de les ales d’una papallona.
És un atractor estrany.
Les equacions de Lorenz
L’atractor estrany:

Les equacions de Lorenz
Lorenz acabà fixant ρ=28, β=8/3 i σ =10:
Anàlisi de la solució:
L’òrbita no està tancada.
L’òrbita no presenta una etapa de transició cap a un
comportament regular, no hi ha una regularitat aparent en
el nombre de loops.
El nombre de loops a la dreta i a l’esquerra depèn,
sensiblement, dels valors inicials. Una petita pertorbació
dels valors inicials produeix una altra sèrie alternativa de
loops.
Altres valors inicials, encara que siguin molt diferents,
produeixen aproximadament la mateixa gràfica.
Les equacions de Lorenz
Algunes propietats de les equacions de Lorenz:
Correspondència: (x, y, z) → (-x,-y,z) té sentit.
Invariància de l’eix z: L’eix z, x = y = 0, és un
conjunt invariant: les solucions que comencen a l’eix
z tendeixen a (0,0,0) per t→∞.
Acotació de les solucions: És possible trobar conjunts
invariants on la solució es manté per algun temps.
Una funció de Liapunov que conforma un el·lipsoide D
i considerant un el·lipsoide E més petit.
Després d’un temps suficient les òrbites quedaran entre
D i E i no en sortiran.

Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions

Estudi realitzat 5 propietats de les equacions de Lorenz:
1. Si 0<ρ <1, l’origen és l’únic punt crític i és un atractor global.
2. Si ρ =1 hi ha una bifurcació i dos punts crítics més:
3. Per ρ=r, r≈13,93 hi ha una bifurcació homoclínica.
4. Per ρ≈24,06 hi ha un atractor estrany.
5. Si 1< ρ <r, r≈24,74 l’origen és inestable i els punts c1 i c2 són estables.
Visió general: 0≤ρ ≤100.

Estudi realitzat
Consideracions:
σ=10.
β=8/3.
ρ variable.
Punt inicial (x,y,z)=(0,1,20).
h=10^-3.
Estudis locals.
RK4 amb Matlab.
Anàlisis d’autovalors amb Matlab.

Estudi realitzat
Punts crítics de les equacions de Lorenz:
S’igualen les expressions a zero:
S’obtenen les igualtats:

Estudi realitzat
Punts crítics de les equacions de Lorenz:
I els punts crítics venen donats per:
Si es substitueix (x,y,z)=(0,0,0) a les expressions:
L’origen també és un punt crític.
Estudi realitzat
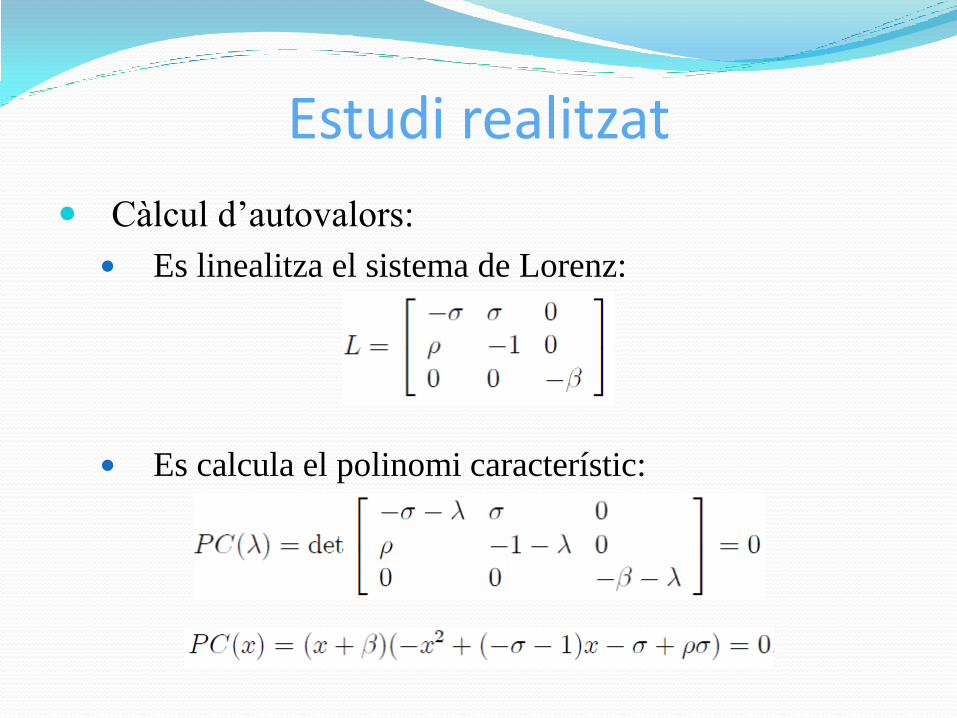
Càlcul d’autovalors:
Es linealitza el sistema de Lorenz:
Es calcula el polinomi característic:
Estudi realitzat
Càlcul d’autovalors:
Els autovalors són les arrels del polinomi
característic i venen donats per:
Amb el Matlab s’ha creat un fitxer de funció que
calcula autovalors per un rang de ρ determinat.

Si 0<ρ <1, l’origen és l’únic punt crític i és un
atractor global:
Si 0<ρ <1 només per (x,y,z)=(0,0,0) les expressions
esdevenen 0, els punts crítics C1 i C2 no ho són.
Com que tots els autovalors per 0<ρ <1 són negatius,
l’origen és un atractor global.
Estudi realitzat,
Propietat 1

Si 0<ρ <1, l’origen és l’únic punt crític i és un
atractor global:
Representació dels punts:
ρ=0 ρ=0,5 ρ=0,9
Estudi realitzat,
Propietat 1
Si ρ =1 hi ha una bifurcació i dos punts crítics més:
Si ρ =1 els punts C1 i C2 també fan que les expressions
siguin 0, són punts crítics.
Anàlisi d’autovalors: Es calculen els autovalors amb el fitxer
de funció de Matlab per 0 <ρ<2 i amb un increment de 0,1:
Per 0 <ρ<1 tots els autovalors són negatius.
Per ρ=1 el segon autovalor és zero i els altres dos són
negatius.
Per ρ>1 el segon autovalor és positiu i els altres dos
negatius.
Estudi realitzat,
Propietat 2

Si ρ =1 hi ha una bifurcació i dos punts crítics més:
Representació dels punts:
ρ=0,9 ρ=1 ρ=1,1
Estudi realitzat,
Propietat 2
Si ρ =1 hi ha una bifurcació i dos punts crítics més:
La bifurcació:
Un autovalor zero.
El punt fix és no hiperbòlic.
S’apliquen varietats centrals
Considerant r= ρ-1.
Els punts fixes C1 i C2 s’expressen per r=(1/β)u^2
Una corba u=0 i l’altre r=(1/β)u^2.
Es té bifurcació de tipus forquilla.
Estudi realitzat,
Propietat 2

Per ρ=r, r≈13,93 hi ha una bifurcació homoclínica:
No s’han trobat indicis de la seva existència.
L’anàlisi d’autovalors no mostra cap canvi:
Primer i tercer autovalors negatius.
Segon autovalor positiu.
Però les bifurcacions homoclíniques són globals.
I no emergeixen de bifurcacions locals.
Estudi realitzat,
Propietat 3

Per ρ=r, r≈13,93 hi ha una bifurcació homoclínica:
No s’han trobat indicis de la seva existència.
La representació gràfica tampoc mostra canvis en el
comportament de la dinàmica del sistema:
ρ=13,9 ρ=14
Estudi realitzat,
Propietat 3

Per ρ=r, r≈13,93 hi ha una bifurcació homoclínica:
No s’han trobat indicis de la seva existència.
Però sí hi ha un canvi destacable entre ρ=14,2 i ρ=14,3:
ρ=14,2 ρ=14,3
Estudi realitzat,
Propietat 3
Per ρ≈24,06 hi ha un atractor estrany:
L’atractor s’ha trobat entre ρ=19,02 i 19,03
Per trobar-lo s’han fet representacions gràfiques:
Per ρ=19 fins a ρ=26, amb un increment d’una unitat.
Es situava entre 19 i 20.
Per ρ=19 fins a ρ=20, amb un increment de 0,1.
Es situava entre 19 i 19,1.
Per ρ=19 fins a 19,1, amb un increment de 0,01.
Es situava entre 19,02 i 19,03.
La discrepància es pot deure a molts factors.
Estudi realitzat,
Propietat 4

Per ρ≈24,06 hi ha un atractor estrany: L’atractor s’ha trobat entre ρ=19,02 i 19,03:
ρ=19,02 ρ= 19,03
No hi ha cap canvi del valor dels autovalors.
Estudi realitzat,
Propietat 4
Si 1< ρ <r, r≈24,74 l’origen és inestable i els punts c1 i c2 són estables:
Per 0< ρ <1 l’origen és asimptòticament estable i és hiperbòlic.
Tots els autovalors són negatius.
Amb varietats centrals i considerant s=ρ-1:
u=0 és un punt fix:
Estable per s<0.
Inestable per s>0.
Estudi realitzat,
Propietat 5
Si 1< ρ <r, r≈24,74 l’origen és inestable i els punts
c1 i c2 són estables:
Per ρ>1:
Es té un autovalor positiu, per tant l’origen és inestable.
Amb els paràmetres fixats c1 i c2 també són inestables.
Estudi realitzat,
Propietat 5
Estudi realitzat
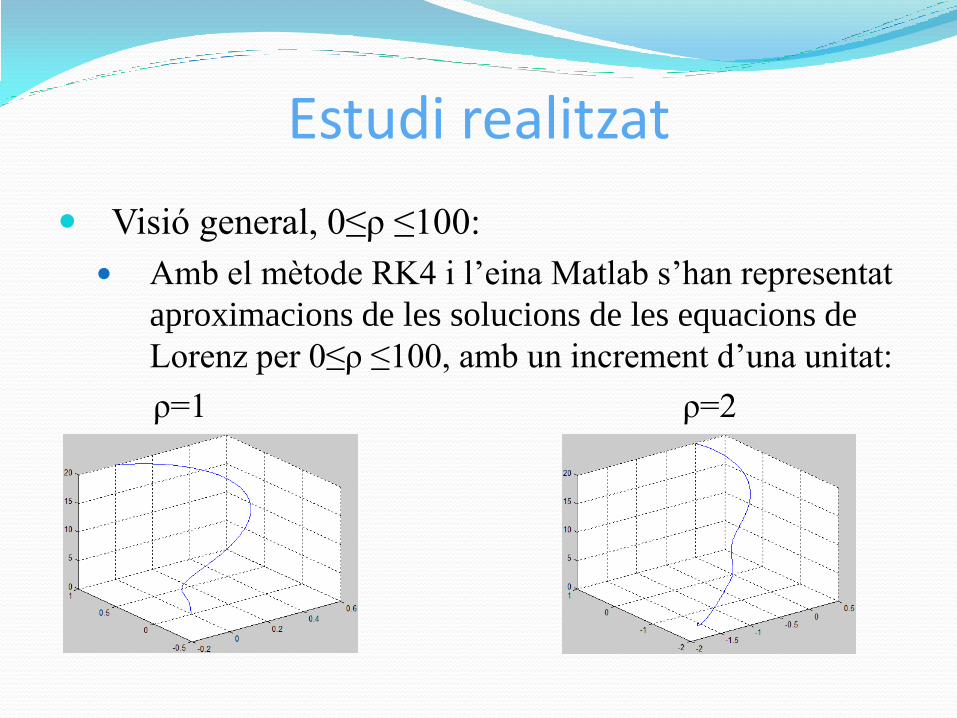
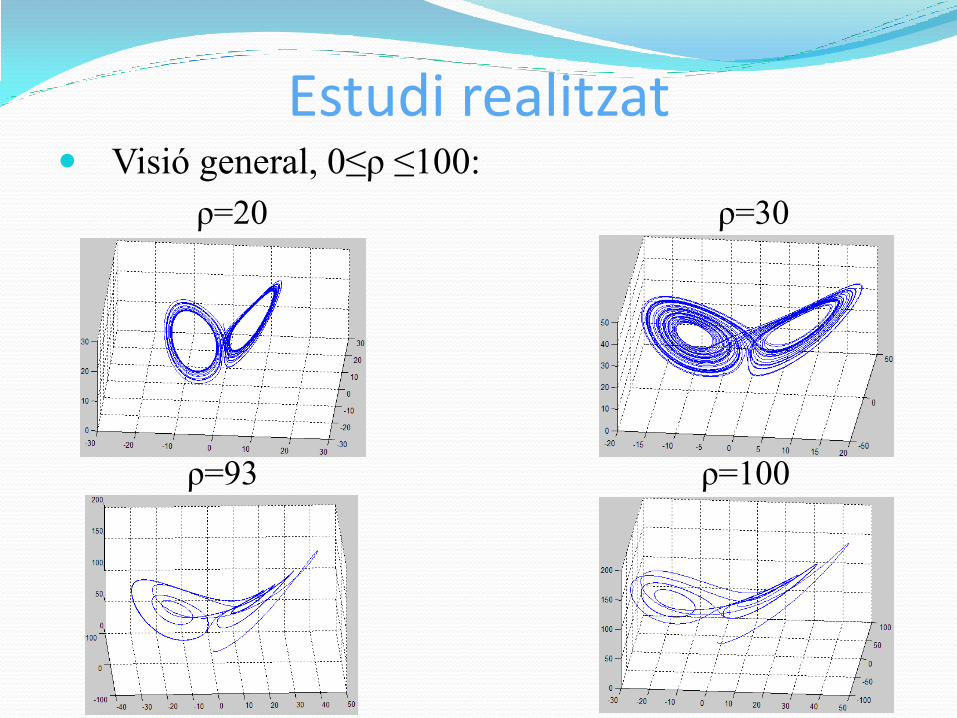
Visió general, 0≤ρ ≤100:
Amb el mètode RK4 i l’eina Matlab s’han representat
aproximacions de les solucions de les equacions de
Lorenz per 0≤ρ ≤100, amb un increment d’una unitat:
ρ=1 ρ=2

Estudi realitzat Visió general, 0≤ρ ≤100:
ρ=3 ρ=5
ρ=6 ρ=9
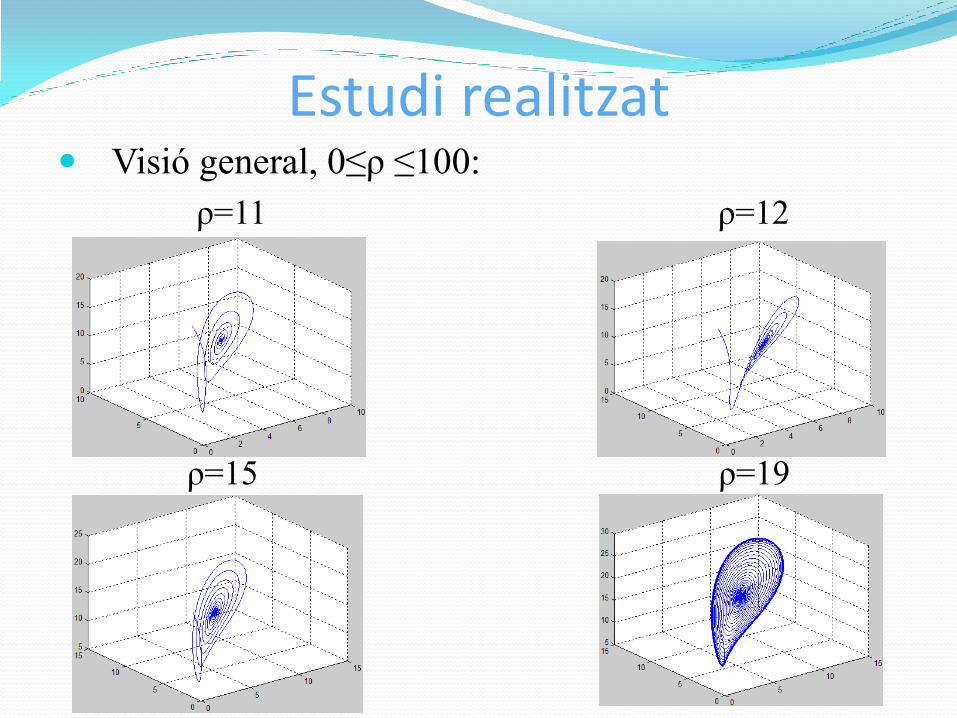
Estudi realitzat Visió general, 0≤ρ ≤100:
ρ=11 ρ=12
ρ=15 ρ=19
Estudi realitzat Visió general, 0≤ρ ≤100:
ρ=20 ρ=30
ρ=93 ρ=100

Estudi realitzat
Visió general, 0≤ρ ≤100:
Amb l’eina Matlab també s’han calculat els autovalors de
la matriu linealitzada per 0≤ρ ≤100:
Per ρ ≤ 0<1 tots tres autovalors són negatius.
Per ρ=1 el primer i el tercer autovalor són negatius però
el segon és zero.
Per 1<ρ ≤100 el primer i el tercer autovalor són
negatius però el segon és positiu.
Es pot afirmar que només hi ha una bifurcació en tot
el model?
Índex Introducció
Anàlisi inicial del projecte
Coneixements bàsics
Equacions de Lorenz
Estudi realitzat
Ampliacions
Ampliacions
Comportament del sistema per diferents valors inicials
Estudi bifurcacions globals
Dinàmica del sistema variant σ i β
Més precisió
Ús d’altres mètodes d’aproximació