desarrollo de dispositivos modulares virtuales de...
TRANSCRIPT
1
DESARROLLO DE DISPOSITIVOS MODULARES VIRTUALES DE
ARQUITECTURA LIBRE PARA EL CONTROL DE POSICIONAMIENTO MULTI-
AXIAL
JULIAN CAMILO SOLANO BRAVO 20112074110
JHON EDISON LONDOÑO RODRIGUEZ 20112074123
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
TECNOLOGÍA MECÁNICA
BOGOTÁ D.C.
2015

2
DESARROLLO DE DISPOSITIVOS MODULARES VIRTUALES DE
ARQUITECTURA LIBRE PARA EL CONTROL DE POSICIONAMIENTO MULTI-
AXIAL
JULIAN CAMILO SOLANO BRAVO 20112074110
JHON EDISON LONDOÑO RODRIGUEZ 20112074123
TRABAJO PARA OPTAR AL TÍTULO DE TECNÓLOGO MECÁNICO
PRESENTADO A:
PROYECTO CURRICULAR DE TECNOLOGÍA MECÁNICA
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
TECNOLOGÍA MECÁNICA
BOGOTÁ D.C.
2015

3
Nota de aceptación
____________________________________
____________________________________
____________________________________
____________________________________
____________________________________
____________________________________
___________________________________
Jurado
___________________________________
MSc.John Alejandro Forero Casallas
Bogotá D.C. ____________ de 2016
4
RESUMEN
En este proyecto se realizó la modelación y simulación para diferentes configuraciones del
dispositivo modular de arquitectura libre de posicionamiento multi-axial, con el objetivo de
optar al título de tecnólogo en mecánica de la Universidad Distrital Francisco José de
Caldas; por medio de la base de datos de la Universidad y de la empresa IDCAE se recopilo
y analizo la información, luego de esto se clasifico para deducir posibles soluciones a través
de los objetivos planteados para culminar satisfactoriamente el desarrollo de este proyecto.
Luego de reconocer los componentes que integran el dispositivo de arquitectura libre, se
modelaron las piezas con su geometría correspondiente lo más semejante al dispositivo
real, utilizando como plataforma base el software NX SIEMENS. Posterior a esto se realiza
el ensamble para cada configuración, y con esto se define parte de la arquitectura de
máquina dependiendo de las propiedades que posee cada mecanismo.
Con la información obtenida a partir del diseño e implementación del dispositivo se estudió
las ecuaciones de movimiento (cinemática directa e inversa) de las diferentes
configuraciones del dispositivo de arquitectura libre. El desarrollo de la cinemática se enfocó
principalmente en el estudio geométrico de movimiento del dispositivo para las distintas
configuraciones respecto a un marco de referencia fijo. Con base en los parámetros para el
análisis y solución de este tipo de mecanismos.
Luego de tener el ensamble de maquina por medio del entorno ISV por sus siglas en inglés
(Integration Simulation and Verification) específicamente con la herramienta Machine Tool
Builder define la cinemática con un sistema de árbol que muestra la relación entre cada
uno de los componentes, con esto se crea un postprocesador con la herramienta Post
Builder utilizando datos de trayectoria. Definiendo este dispositivo como una fresadora de
tres ejes. Posterior a esto la maquina es insertada a la librería de NX SIEMENS. Con el fin
de poder ser llamada desde una pieza en la cual fueron generadas trayectorias por medio
de la aplicación de manufactura.
Debido a que el ISV no está diseñado para dispositivos basados en robótica paralela se
optó por desarrollar la maquina por otro método Co-simulación en donde se definen la
arquitectura de maquina mediante enlaces y juntas para luego exportarlo como un modelo
de bloque con el propósito de controlarlo desde MATLAB con un arreglo de bloques
desarrollado en Simulink.

5
ABSTRACT
In this Project was performed the modeling and simulation for different configurations of
free modular device of architecture of multi axial positioning, with objetive to obtain the title
of mechanical technologist at the Distrital University Francisco José de Caldas; through the
data bases of the University and the company IDCAE was collected and analyzed
information, after that it was classified to deduce possible solutions through the objectives
to successfully complete the development of this Project.
After recognizing the components that make up the device open architecture, the pieces
were modeled with the geometry corresponding most similar to the actual device, using as
the base platform NX SIEMENS software. Following this assembly for each configuration it
is done, and with this it defined part of the machine architecture depending on the properties
possessed by each mechanism.
With the information obtained from the design and implementation of the device it was
studied the equations of motion (direct and inverse kinematics) of the different configurations
free device architecture. The development of kinematics focused primarily on the geometric
study of movement of the device for different configurations with respect to a fixed reference
frame. Based on the parameters for the analysis and solution of these mechanisms.
After having assembly machine through the ISV environment for its acronym in English
(Integration Simulation and Verification) specifically with Machine Tool Builder defines the
kinematic a system tree showing the relationship between each of the components, with this
postprocessor is created using the Post Builder tool path data. Defining this device as a
three-axis milling machine. Following this machine it is inserted NX SIEMENS library. In
order to be called from a piece in which they were generated paths through manufacturing
application.
Due to the ISV is not designed for devices based in parallel robotics he was chosen to
develop the machine by another method Co-simulation where machine architecture are
defined by links and joints and then export it as a model block in order to tell the tale from
MATLAB with an array of blocks developed in Simulink

6
Contenido RESUMEN ......................................................................................................................... 4
ABSTRACT ....................................................................................................................... 5
1. Planteamiento del problema ..................................................................................... 11
1.1. Estado del arte .................................................................................................. 12
1.1.1. A Novel 3-Dof Three-Translation Parallel Mechanism and Displacement
Analysis 12
1.1.2. Algoritmo para la Solución de la Cinemática Directa de Robots Paralelos
Planares 3RRR Destinados a Aplicaciones en Tiempo Real..................................... 13
1.1.3. Kinematics and Workspace Analysis of a Novel 3-DOF Spatial Parallel Robot
14
1.1.4. Modelo Matemático de un Robot Paralelo de seis grados de libertad ......... 15
1.1.5. Resolución del problema cinemático inverso en un robot SCARA mediante
grupos de Assur. ....................................................................................................... 16
1.1.6. Diseño, Análisis y Construcción de un Robot Paralelo Translacional .......... 16
1.1.7. Diseño óptimo de un robot paralelo con configuración Delta para
aplicaciones educativas. ........................................................................................... 16
1.1.8. Cinemática inversa de robot serial utilizando algoritmo genético basado en
MCDS 17
1.1.9. Dynamic modeling and redundant force optimization of a 2-DOF parallel
kinematic machine with kinematic redundancy ......................................................... 17
1.1.10. Kinematics analysis and workspace investigation of a novel 2-DOF parallel
manipulator applied in vehicle driving simulator ........................................................ 19
1.1.11. Análisis de un manipulador paralelo plano de dos grados de libertad. ........ 19
1.1.12. Modelación y simulación dinámica de un brazo robótico de 4 grados de
libertad para tareas sobre un plano horizontal .......................................................... 20
1.2. Justificación ....................................................................................................... 21
1.3. Objetivos ........................................................................................................... 22
1.3.1. Objetivo general ......................................................................................... 22
1.3.2. Objetivos específicos: ................................................................................. 22
2. Marco teórico ............................................................................................................ 23
2.1. Robótica Paralela .............................................................................................. 23
2.2. Manipuladores Seriales ..................................................................................... 23
2.3. Cinemática ........................................................................................................ 23
2.3.1. Cinemática directa. ..................................................................................... 23
2.4. Tipos de movimiento .......................................................................................... 24
2.4.1. Rotación pura ............................................................................................. 24
7
2.4.2. Traslación pura ........................................................................................... 24
2.4.3. Movimiento complejo .................................................................................. 24
2.5. Eslabones y cadenas cinemáticas ..................................................................... 24
2.5.1. Eslabón ...................................................................................................... 24
2.5.2. Cadena cinemática ..................................................................................... 25
2.6. Grados de libertad ............................................................................................. 25
2.7. Post building ...................................................................................................... 26
2.8. Espacio de Trabajo ............................................................................................ 27
2.9. NX SIEMENS .................................................................................................... 27
2.11. Integrado de Simulación y Verificación (ISV) .................................................. 28
2.12. Co-simulación ................................................................................................ 29
2.13. Matlab ............................................................................................................ 29
2.14. Simulink ......................................................................................................... 30
3. Metodología .............................................................................................................. 31
3.1. Modelación Plataforma NX Siemens 10 ............................................................. 31
3.2. Recopilación ...................................................................................................... 33
3.3. Ensamble .......................................................................................................... 34
3.4. Diseño matemático ............................................................................................ 37
3.5. Control de posicionamiento y Programación ...................................................... 38
4. Metodología configuración cero ................................................................................ 40
4.1. ISV .................................................................................................................... 40
4.2. Definición de Cinemática. .................................................................................. 40
4.3. Creación de Postprocesador. ............................................................................ 44
4.4. Diseño matemático ............................................................................................ 48
4.4.1. Modelación cinemática directa. ................................................................... 48
4.4.2. Modelamiento cinemática inversa para la configuración cero ..................... 50
5. Metodología Configuración 1 .................................................................................... 51
5.1. Modelación ............................................................................................................ 51
5.2. Diseño matemático ................................................................................................ 51
5.2.1. Modelación matemática cinematica directa. .................................................... 51
5.2.2. Modelación matemática cinemática inversa .................................................... 54
5.3. Control de posicionamiento y programación .......................................................... 55
5.4. Creación de enlaces y juntas ............................................................................. 55
5.5. Entorno de trabajo. ............................................................................................ 56
5.6. Selección de Links en el dispositivo. .................................................................. 57

8
5.7. Selección de Joints. ........................................................................................... 57
5.8. Requerimientos para enlazar con Matlab ........................................................... 59
5.8.1. Markets ....................................................................................................... 59
5.8.2. Sensors ...................................................................................................... 60
5.8.3. Matematica ................................................................................................. 61
5.8.4. Imput .......................................................................................................... 61
5.8.5. Output......................................................................................................... 62
5.8.6. Exportacion del modelo a Matlab ................................................................ 62
5.8.7. Simulink ...................................................................................................... 63
6. Metodología Configuracion_2 ................................................................................... 64
6.1. Piezas modeladas y ensamble de máquina. .......................................................... 64
6.2. Diseño Matemático ................................................................................................ 65
6.2.1. Modelamiento matemático cinemática directa ................................................. 65
6.2.2. Modelamiento matemático cinemática inversa ................................................ 67
6.3. Programación y control de posicionamiento .......................................................... 68
7. Metodología Configuración 3 .................................................................................... 69
7.1. Piezas modeladas y ensamble de máquina. .......................................................... 69
7.2. Diseño Matemático ................................................................................................ 69
7.2.1. Modelamiento matemático cinemática directa. ................................................ 69
7.2.2. Modelamiento matemático cinemática inversa. ............................................... 70
7.3. Programación y control de posicionamiento .......................................................... 71
8. RESULTADOS. ........................................................................................................ 72
8.1. Representación de la cinemática de la máquina herramienta ................................ 72
8.2. Mecanizado ........................................................................................................... 73
8.3. Detección de colisiones ........................................................................................ 73
8.4. Mostrar espesor por el color .............................................................................. 74
8.5. Programa con códigos NC ................................................................................ 75
8.6. Hoja de programas ............................................................................................ 76
8.7. Dispositivos paralelos ........................................................................................ 76
OBSERVACIONES Y RECOMENDACIONES ................................................................. 78
CONCLUSIONES ............................................................................................................ 79
BIBLIOGRAFÍA. ............................................................................................................... 80

9
INDICE DE FIGURAS
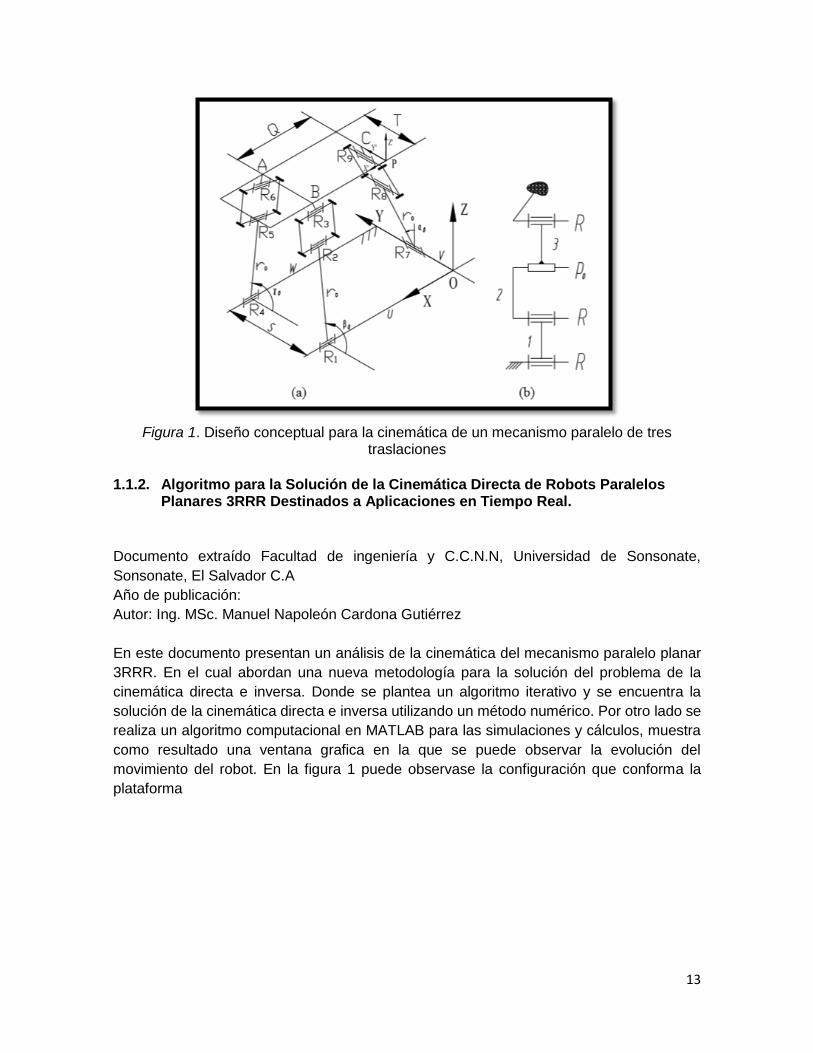
Figura 1. Diseño conceptual para la cinemática de un mecanismo paralelo de tres
traslaciones ..................................................................................................................... 13 Figura 2. . Plataforma paralela planar 3RRR. .................................................................. 14 Figura 3. Manipulador paralelo propuesto y sus coordenadas asociadas ........................ 15 Figura 4 Robot paralelo de síes grados de libertad .......................................................... 15 Figura 5. Modelo de la estructura del robot Melfa RV-2A. ............................................... 17 Figura 6. Máquina herramienta hibrida............................................................................. 18 Figura 7. Diagrama esquemático de la maquina. ............................................................. 18 Figura 8. Manipulador paralelo construido ....................................................................... 19 Figura 9. Manipulador paralelo 2 DOF ............................................................................. 20 Figura 10 Simulación de ubicación variando las coordenadas articulares en MATLAB .... 21 Figura 11. Cadena de mecanismos ................................................................................. 25 Figura 12. Aplicaciones de NX ......................................................................................... 28 Figura 13. Representación esquemática ISV ................................................................... 29 Figura 14. Iconos para selecciónar el role advanced. ...................................................... 31 Figura 15. Ventana para selección de Templates. ........................................................... 32 Figura 16. Herramientas para dibujo en 2D. .................................................................... 32 Figura 17. Herramientas para modelación en 3D. ............................................................ 33 Figura 18. Elemento extruido visualización 3D................................................................. 33 Figura 19. Ventana de adición de elementos parte izquierda, carpeta con cada
componente de máquina. ................................................................................................ 35 Figura 20. Restricciones de ensamble ............................................................................. 35 Figura 21. Piezas que fueron ensambladas pero se comportan como un solo elemento,
con restricción de Unión para ensamble del dispositivo. .................................................. 36 Figura 22. Ensamble Configuracion_0 de 3 ejes. ............................................................. 36 Figura 23. Modelado NX configuración 0 ......................................................................... 37 Figura 24 software MATLAB R2015a ............................................................................... 37 Figura 25. Configuración_0, maquina basada en robótica serial de 3 ejes. ...................... 38 Figura 26. Configuración_1, maquina basada en robótica paralela. ................................. 38 Figura 27. Configuración_2, maquina basada en robótica paralela. ................................. 39 Figura 28. Configuración_3, máquina basada en robótica paralela. ................................. 39 Figura 29. Inicio a la aplicación fabricante de la máquina, que proporciona herramientas
para crear y editar una máquina herramienta. ................................................................. 41 Figura 30. Inicio a navegador de la máquina-herramienta ............................................... 41 Figura 31. Cinemática para la arquitectura de máquina Configuracion_0. ....................... 42 Figura 32. Relación de (k-Componentes) para la cinemática de máquina. ....................... 43 Figura 33. Animación de máquina, verificación de límites de los ejes. ............................. 43 Figura 34. Entorno de generador de postprocesadores. .................................................. 45 Figura 35. Líneas de código para añadir la máquina a la librería de Siemens NX. ........... 45 Figura 36. Herramienta de trabajo (fresa para desbaste). ................................................ 46 Figura 37. Trayectorias de mecanizado ........................................................................... 47 Figura 38. Código de programación. Cinemática directa de la configuración cero ........... 49 Figura 39. Código cinemática inversa del dispositivo para la configuración cartesiana o
configuración cero ........................................................................................................... 50 Figura 40. Configuracion_1 dispositivo paralelo. .............................................................. 51

10
Figura 41. Esquema primera cadena cinemática configuración uno. ............................... 52 Figura 42. Esquema segunda cadena cinemática configuración uno ............................... 53 Figura 43. Crear simulación nueva. ................................................................................. 56 Figura 44. Parámetros de entrada para la Co-simulación. ............................................... 56 Figura 45. Icono de Enlace ............................................................................................. 57 Figura 46. Cuerpos rígidos definidos del dispositivo ........................................................ 57 Figura 47. Junta ............................................................................................................... 57 Figura 48. Parámetros de Joint deslizante. ...................................................................... 58 Figura 49. Juntas definidas para el dispositivo. ................................................................ 58 Figura 50. Solución sistema redundante. ......................................................................... 59 Figura 51. Marcadores de desplazamiento (azul y rojo). .................................................. 60 Figura 52 . Definicion de sensor ...................................................................................... 60 Figura 53. Insercion de cinematica entorno NX. ............................................................... 61 Figura 54. Planta de entrada ............................................................................................ 61 Figura 55. Planta de salida. ............................................................................................. 62 Figura 56. Dispositivo listo para Enlace con Simulink ...................................................... 62 Figura 57. Bloque de conjunto de Configuracion_1 .......................................................... 63 Figura 58. Control de bloques del dispositivo en Simulink igual a entradas y salidas en NX
........................................................................................................................................ 63 Figura 59. Configuracion_2 enlaces y juntas definidas. ................................................... 64 Figura 60. Esquema primera cadena cinemática ‘configuración dos’. ............................. 65 Figura 61. Esquema segunda cadena cinemática configuración 2 ................................... 66 Figura 62. Configuracion_2 con requisitos para la Co-simulación. ................................... 68 Figura 63. Configuracion_2 enlaces y juntas definidas. ................................................... 69 Figura 64. Configuracion_3 con requisitos para la Co-simulación. ................................... 71 Figura 65. Comprobación de cinemática del dispositivo. .................................................. 72 Figura 66. Mecanización con visualización de remoción de material. .............................. 73 Figura 67. Detección de colisión ...................................................................................... 74 Figura 68. Espesor de pieza de trabajo ........................................................................... 74 Figura 69. Panel de control de la simulación. ................................................................... 75 Figura 70. Programa NC en ISO (lenguaje de programación G) ..................................... 75 Figura 71. Hoja de programas. ........................................................................................ 76

11
1. Planteamiento del problema
Hoy en día en la industria la automatización tiene un amplio campo de aplicaciones ya que
ofrece mejorías y puede reducir gastos económicos aumentando su productividad, además
de realizar procesos industriales que requieran de alta precisión.
La automatización viene dada por medio de un lenguaje de programación donde este
lenguaje tiene facilidad de desarrollar pero sus líneas de código tienden a ser muy extensas
cuando la geometría de la pieza de trabajo puede llegar a ser más compleja. Además por
su gran extensión en sus líneas de códigos puede tener errores por interacción de hombre
maquina lo cual puede representar inconvenientes: como daños en la máquina, o productos
que no cumplan con un alto estándar de calidad.
Por lo cual las máquinas virtuales son una herramienta eficaz para simular el dispositivo
físico con una alta fidelidad, ya que las máquinas virtuales vienen definidas con
restricciones dadas por el dispositivo real. Lo cual indica que la simulación tiene gran
confiabilidad.
Debido a que cada día las industrias están más obligadas a optimizar sus procesos de
producción, es por ello que ha surgido la necesidad no solo de crear productos y procesos
más eficientes, pues se sabe que la variable tiempo en la industria combinada con una
producción de calidad puede llegar a elevar su competitividad y representar mejores
ganancias.
Porque al tener una máquina virtual se reemplaza el control numérico computacional
manual por códigos desarrollados automáticamente por un software, otorgando mayor
rapidez y exactitud con la certeza de que la programación obtenida tiene un bajo margen
de error ya que se puede visualizar todo el proceso de mecanizado antes en la pantalla, y
así corroborar que el proceso está bien definido.
Las maquinas basadas en robótica paralela son tecnologías medianamente nuevas
utilizadas en la industria que ofrecen características como mayor capacidad de carga y alta
precisión, pero como desventaja tiene un reducido espacio de trabajo además tiene una
cinemática de maquina compleja, por tal motivo es importante adquirir conocimiento en los
espacios académicos ya que esta tecnología ha sido implementada con más rapidez en la
industria.
Debido a al poco tiempo en el mercado los dispositivos basados en robótica paralela no
han sido ampliamente estudiados, por esta razón una máquina virtual para este tipo de
dispositivos puede dar una visión más clara del funcionamiento de esta clase de
mecanismos
La aplicabilidad de estos dispositivos en la industria sería mayor si se pudiera garantizar la
confiablidad por medio de dispositivos virtuales, y así poder definir la capacidad de procesos
con el que cuenta el dispositivo.
En la industria se ha tenido una gran aceptación de las máquinas virtuales ya que estas
traen desarrollo tecnológico, poniendo a empresas en un alto nivel de competitividad pues
12
esta herramienta facilita la interacción entre hombre-máquina real, lo que implica desarrollo
económico-social para el país, ya que actualmente en Colombia el desarrollo de estas
tecnologías es bajo, debido a la limitada información relacionado con estas herramientas
informáticas, obteniendo un bajo nivel de investigación a nivel nacional por lo que
básicamente son importadas de otros países pagando un alto costo por la obtención de
dicha tecnología.
1.1. Estado del arte
La obtención de información se desarrolló por medio de la biblioteca virtual de la
Universidad Distrital Francisco José de Caldas utilizando la base de datos de la IEEE
(institute of electrical and electronics enginners) y ScienceDirect fuentes confiables a nivel
mundial en la ingeniería, donde se abordaron artículos con enfoque hacia el objetivo de
este proyecto.
Por otro lado se tomaron otras fuentes de información como artículos encontrados en
internet de desarrollo tecnológico, además una publicación de la Revista Tecnura de la
universidad Distrital Francisco José de Caldas
La información de Los textos científicos y de ingeniería recolectados proporciona bases
para la construcción y solución al problema planteado pues ayudan a contextualizar ubicar
y centralizar la información relacionada con Cinemática directa y cinemática inversa de
dispositivos basados en robótica paralela.
1.1.1. A Novel 3-Dof Three-Translation Parallel Mechanism and Displacement Analysis
Documento extraído de Facultad de Mecánica y Energía Ingeniería de la Universidad
Politécnica de Jiangsu Changzhou
Año de publicación: 2009
Autores: Huiping Shen, Ju Li, Shaobin Tao, Luzhong Ma, Jiaming Deng, Tingli Yang
Este articulo presenta un robot tipo delta de 3 grados de libertad basado en robótica paralela
en el cual se desarrolla la cinemática directa y la cinemática inversa, junto con el análisis
de movimiento y movilidad que tiene este robot, además de soluciones inversas para estos
casos planteado mediante un sistema de coordenadas. Tal como muestra la figura.
13
Figura 1. Diseño conceptual para la cinemática de un mecanismo paralelo de tres
traslaciones
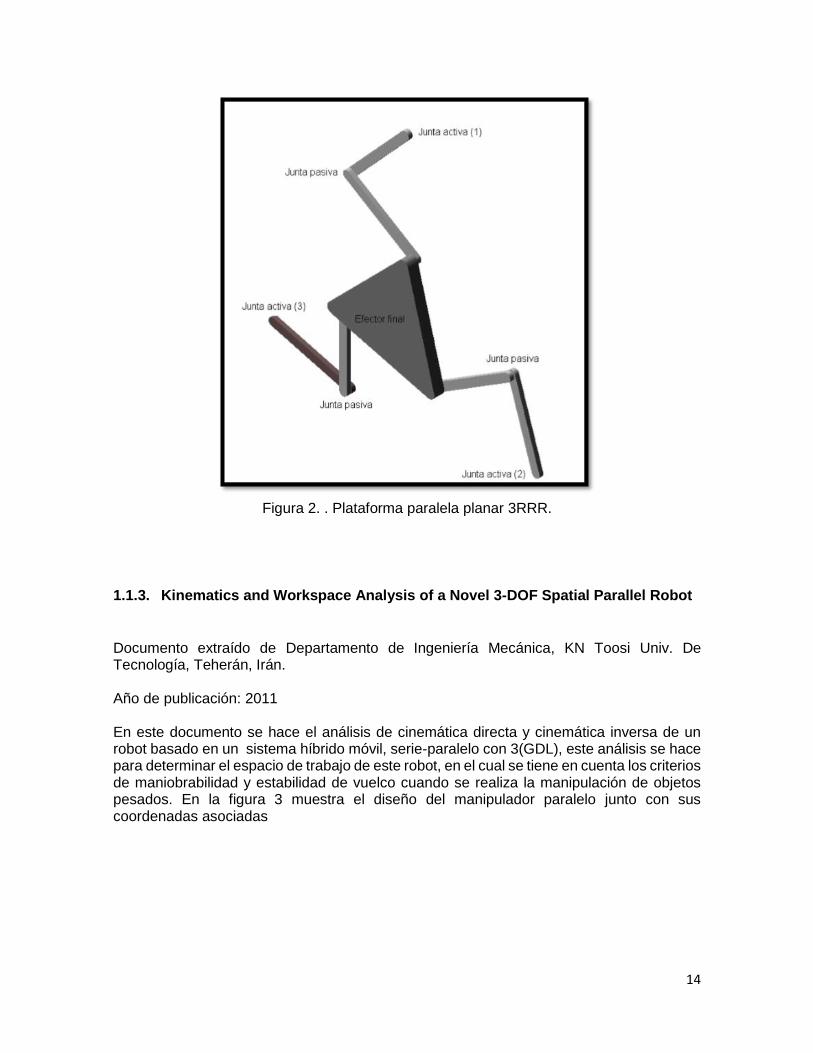
1.1.2. Algoritmo para la Solución de la Cinemática Directa de Robots Paralelos Planares 3RRR Destinados a Aplicaciones en Tiempo Real.
Documento extraído Facultad de ingeniería y C.C.N.N, Universidad de Sonsonate,
Sonsonate, El Salvador C.A
Año de publicación:
Autor: Ing. MSc. Manuel Napoleón Cardona Gutiérrez
En este documento presentan un análisis de la cinemática del mecanismo paralelo planar
3RRR. En el cual abordan una nueva metodología para la solución del problema de la
cinemática directa e inversa. Donde se plantea un algoritmo iterativo y se encuentra la
solución de la cinemática directa e inversa utilizando un método numérico. Por otro lado se
realiza un algoritmo computacional en MATLAB para las simulaciones y cálculos, muestra
como resultado una ventana grafica en la que se puede observar la evolución del
movimiento del robot. En la figura 1 puede observase la configuración que conforma la
plataforma
14
Figura 2. . Plataforma paralela planar 3RRR.
1.1.3. Kinematics and Workspace Analysis of a Novel 3-DOF Spatial Parallel Robot
Documento extraído de Departamento de Ingeniería Mecánica, KN Toosi Univ. De Tecnología, Teherán, Irán. Año de publicación: 2011 En este documento se hace el análisis de cinemática directa y cinemática inversa de un robot basado en un sistema híbrido móvil, serie-paralelo con 3(GDL), este análisis se hace para determinar el espacio de trabajo de este robot, en el cual se tiene en cuenta los criterios de maniobrabilidad y estabilidad de vuelco cuando se realiza la manipulación de objetos pesados. En la figura 3 muestra el diseño del manipulador paralelo junto con sus coordenadas asociadas

15
Figura 3. Manipulador paralelo propuesto y sus coordenadas asociadas
1.1.4. Modelo Matemático de un Robot Paralelo de seis grados de libertad
Documento extraído de Universidad de las Américas – Puebla. Escuela de ingeniería y ciencias Departamento de computación, electrónica, física e Innovación En esta tesis se hace el análisis de cada componente del dispositivo determinando los grados de libertad del conjunto, la cinemática directa e inversa del robot fue descrita basándose en la estructura y geometría del mecanismo, con esto se determinó el espacio de trabajo en función de las limitantes mecánicas y geométricas. A partir de los limitantes se obtuvieron inecuaciones que representan solidos con lo que el dispositivo puede ser posicionado, también realizo un análisis dinámico, velocidad y aceleración entre los componentes del robot, el cual es utilizado para la generación de movimientos y trayectorias describiendo con esto la dinámica directa e inversa del dispositivo, posteriormente se simula tanto la dinámica como la cinemática en el simulador 3D basado en plataforma Java (OpenGL).
Figura 4 Robot paralelo de síes grados de libertad
16
1.1.5. Resolución del problema cinemático inverso en un robot SCARA mediante grupos de Assur.
Documento extraído de Dpto. de Construcción e Ingeniería de Fabricación. Universidad de Oviedo En este artículo presentan un nuevo método para la solución cinemática de un robot scara con un mecanismo de 3 grados de libertad, basándose en el método “grupos de Assur RRR”; ya que este presenta una mayor eficiencia computacional al momento de realizar una simulación. A partir de formulación de la cinemática del grupo RRR, formulan la cinemática inversa para el robot scara y por medio de esta formulación permite determinar el modo de trabajo del robot en cualquier instante de la simulación debido a su gran eficiencia
1.1.6. Diseño, Análisis y Construcción de un Robot Paralelo Translacional
Autor: Juan Antonio Briones León Documento Extraído del Centro de Investigación en Ciencia Aplicada y Tecnología Avanzada Instituto Politécnico Nacional Querétaro, México. En este artículo diseñan y analizan un robot paralelo con dos mecanismos de 5 barras conectados por articulaciones prismáticas, el cálculo de la movilidad del mecanismo está desarrollada por la fórmula de Gogu, mientras que la cinemática directa e inversa es desarrollada de la forma más común que es el análisis geométrico del manipulador, se utiliza el jacobiano que fue desarrollado a partir del análisis de los brazos que conforman el mecanismo, por otro lado el cálculo del espacio de trabajo se desarrolla a partir de las geometrías de los eslabones.
1.1.7. Diseño óptimo de un robot paralelo con configuración Delta para aplicaciones educativas.
Autor: Edison Martínez, Cesar Peña, Eugenio Yime. Año de publicación: 2010 Documento extraído de Asociación Colombiana de Facultades de Ingeniería (ACOFI) En este trabajo se desarrolló el cálculo del espacio de trabajo del robot Paralelo tipo Delta, donde la cinemática inversa fue desarrollada mediante el análisis geométrico y el uso de una aplicación de Matlab, luego de esto se escogido un volumen predeterminado, se toma un número de puntos equidistantes dentro de su espacio de trabajo y se evalúa la
17
cinemática inversa en cada uno de esos puntos para corroborar si el robot realmente puede llegar a un punto determinado.
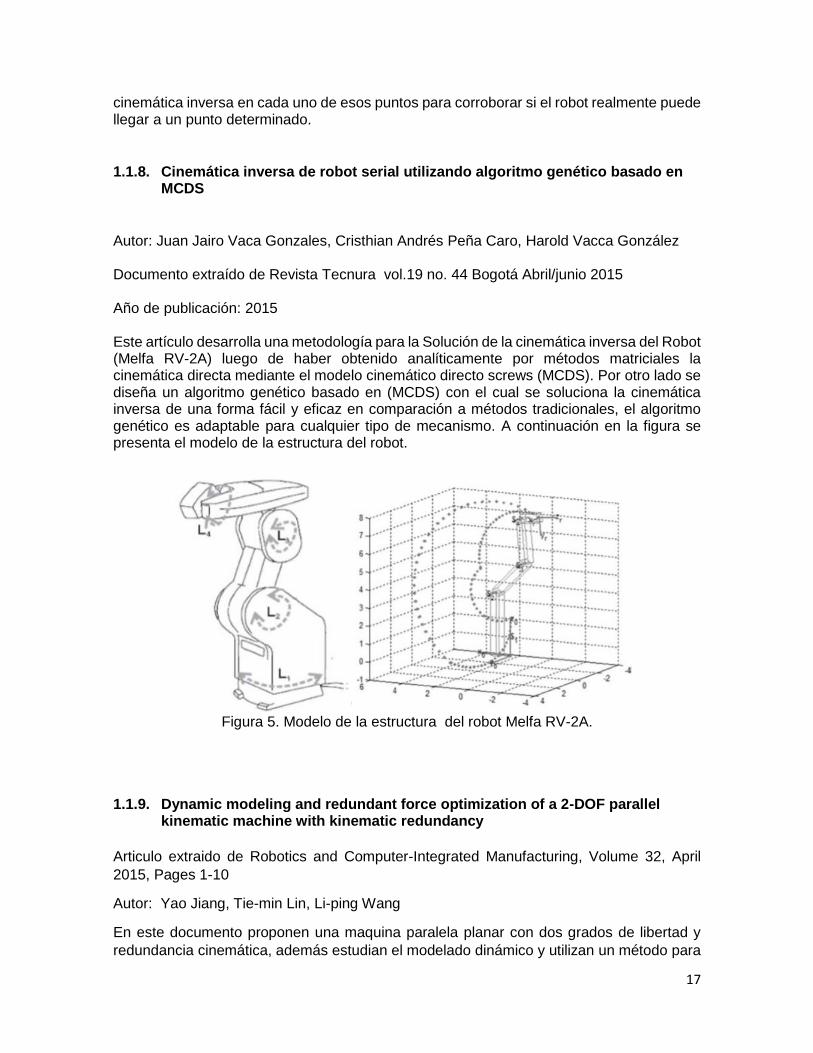
1.1.8. Cinemática inversa de robot serial utilizando algoritmo genético basado en MCDS
Autor: Juan Jairo Vaca Gonzales, Cristhian Andrés Peña Caro, Harold Vacca González Documento extraído de Revista Tecnura vol.19 no. 44 Bogotá Abril/junio 2015 Año de publicación: 2015 Este artículo desarrolla una metodología para la Solución de la cinemática inversa del Robot (Melfa RV-2A) luego de haber obtenido analíticamente por métodos matriciales la cinemática directa mediante el modelo cinemático directo screws (MCDS). Por otro lado se diseña un algoritmo genético basado en (MCDS) con el cual se soluciona la cinemática inversa de una forma fácil y eficaz en comparación a métodos tradicionales, el algoritmo genético es adaptable para cualquier tipo de mecanismo. A continuación en la figura se presenta el modelo de la estructura del robot.
Figura 5. Modelo de la estructura del robot Melfa RV-2A.
1.1.9. Dynamic modeling and redundant force optimization of a 2-DOF parallel kinematic machine with kinematic redundancy
Articulo extraido de Robotics and Computer-Integrated Manufacturing, Volume 32, April
2015, Pages 1-10
Autor: Yao Jiang, Tie-min Lin, Li-ping Wang
En este documento proponen una maquina paralela planar con dos grados de libertad y
redundancia cinemática, además estudian el modelado dinámico y utilizan un método para

18
la optimización de la fuerza redundante; ya que este método tiene como objetivo mejorar la
precisión al momento de posicionarse reduciendo al mínimo los errores de posición de la
plataforma manipulada en la máquina. Con esto las ventajas de añadir redundancia
cinemática es evitar singularidades cinemáticas, aumentar el espacio de trabajo como
también la mejora de la destreza para la máquina. El mecanismo consta de una plataforma
manipulada, dos carriles verticales, tres deslizadores activos y un enlace extensible como
se muestra en la figura 6.
Figura 6. Máquina herramienta hibrida.
Figura 7. Diagrama esquemático de la maquina.

19
1.1.10. Kinematics analysis and workspace investigation of a novel 2-DOF parallel manipulator applied in vehicle driving simulator
Autor: Chen Zhang, Liyan Zhang Documento tomado de Robotics and Computer-Integrated Manufacturing, Volume 29, Issue
4, August 2013, Pages 113-120
En este artículo estudian un manipulador paralelo con dos grados de libertad el cual es
aplicado en un simulador de conducción, el mecanismo que plantean cuenta con dos
rotaciones y está compuesto por una plataforma interior fija, dos cilindro eléctricos, pilares
de apoyo una plataforma superior y algunas articulaciones. Para el que en primer lugar
analizan las características de la cinemática de dicho manipulador junto con la descripción
geométrica; y con esto hacen un estudio de algunas fórmulas analíticas para la solución de
la cinemática inversa y el desplazamiento del mecanismo, presentan el análisis de espacio
de trabajo que tendrá dicho manipulador.
1.1.11. Análisis de un manipulador paralelo plano de dos grados de libertad.
Documento extraído de la Universidad Tecnológica de Pereira, 3er Congreso Internacional
de Ingeniería Mecatrónica – UNAB
Autor: Clemencia Niño, Héctor Quintero, Mauricio Monroy, Marlon Herrera
En este trabajo realizan el diseño y análisis de un manipulador paralelo plano de dos grados
de libertad, cuya finalidad es realizar procesos de pulido. Además presentan los resultados
para la cinemática directa e inversa, junto con la dinámica inversa del dispositivo,
comparándolos con los resultados obtenidos en ‘working model’. En la figura 8 se puede
observar el dispositivo construido junto con la pieza a la que se quiere realizar el pulido.
Figura 8. Manipulador paralelo construido
20
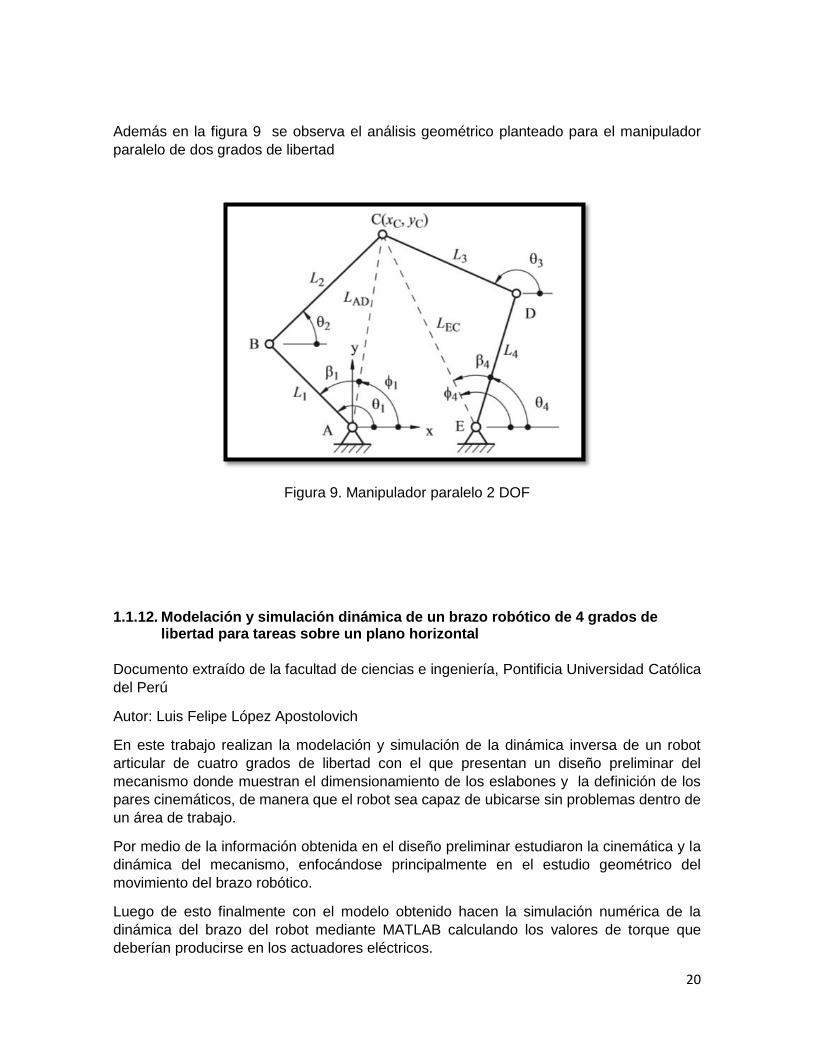
Además en la figura 9 se observa el análisis geométrico planteado para el manipulador
paralelo de dos grados de libertad
Figura 9. Manipulador paralelo 2 DOF
1.1.12. Modelación y simulación dinámica de un brazo robótico de 4 grados de libertad para tareas sobre un plano horizontal
Documento extraído de la facultad de ciencias e ingeniería, Pontificia Universidad Católica
del Perú
Autor: Luis Felipe López Apostolovich
En este trabajo realizan la modelación y simulación de la dinámica inversa de un robot
articular de cuatro grados de libertad con el que presentan un diseño preliminar del
mecanismo donde muestran el dimensionamiento de los eslabones y la definición de los
pares cinemáticos, de manera que el robot sea capaz de ubicarse sin problemas dentro de
un área de trabajo.
Por medio de la información obtenida en el diseño preliminar estudiaron la cinemática y la
dinámica del mecanismo, enfocándose principalmente en el estudio geométrico del
movimiento del brazo robótico.
Luego de esto finalmente con el modelo obtenido hacen la simulación numérica de la
dinámica del brazo del robot mediante MATLAB calculando los valores de torque que
deberían producirse en los actuadores eléctricos.

21
Figura 10 Simulación de ubicación variando las coordenadas articulares en MATLAB
1.2. Justificación
En la actualidad el desarrollo de nuevas tecnologías en Colombia está ligado a los recursos
económicos, lo cual es un obstáculo para el avance tecnológico ligado a la robótica, esta
investigación quiere ser una herramienta que brinde una solución adsequible para cualquier
persona identificando las necesidades en la industria teniendo crecimiento económico y
aumentando el nivel progresivo y competitivo del país.
La adquisición de dispositivos de robótica paralela es difícil por su elevado costo comercial,
por tal motivo se ve la necesidad de reemplazar, en los entornos académicos, el dispositivo
físico por máquinas virtuales como herramienta útil por su bajo costo y facilidad de
adquisición.
Las máquinas virtuales desempeñan un papel importante en la industria al ser utilizadas
para la disminución de errores mediante simulaciones previas al trabajo en máquinas
automatizadas, aumentando su producción y evitando costos por errores de programación.
Entonces las máquinas virtuales pueden simular con mucha precisión el comportamiento
de cualquier dispositivo, lo que hace que la interacción de la máquina virtual al físico sea
muy parecida, para lo que se requiere realizar máquinas virtuales en diferentes
configuraciones con el fin de ser utilizadas como fuente de aprendizaje sobre robótica
paralela
22
1.3. Objetivos
1.3.1. Objetivo general
Desarrollar dispositivos modulares virtuales de arquitectura libre para el control de
posicionamiento multi-axial.
1.3.2. Objetivos específicos:
Completar el montaje virtual en plataforma NX Siemens para cuatro configuraciones
del dispositivo modular de arquitectura libre para el control de posicionamiento
multiaxial.
Desarrollar la cinemática directa de cuatro configuraciones del dispositivo modular
de arquitectura libre para el control de posicionamiento multiaxial.
Desarrollar la cinemática inversa de cuatro configuraciones del dispositivo modular
de arquitectura libre para el control de posicionamiento multiaxial.
Programar un post procesador

23
2. Marco teórico
2.1. Robótica Paralela
Los robots paralelos están conformados por cadenas cinemáticas independientes, poseen
varias ventajas frente a los robots tipo serie, pueden alcanzar velocidades y aceleraciones
superiores manejan cargas superiores, poseen alta rigidez lo que se traducen mayores
precisiones. Su desventaja es que tiene menos espacio de trabajo además de tener una
cinemática más compleja. [3]
2.2. Manipuladores Seriales
Un manipulador serial consiste de varios enlaces conectados en serie por diferentes tipos
de juntas, por lo general juntas de revolución y prismáticas. Un extremo del manipulador
está fijado en el suelo y el otro extremo es libre de moverse en el espacio. Por esta razón
un manipulador serial es algunas veces llamado manipulador de lazo abierto. [3]
2.3. Cinemática
Estudio del movimiento de sistemas mecánicos, sin tomar en cuenta las fuerzas que
originan dicho movimiento.
Un propósito de la cinemática es diseñar los movimientos deseados para elementos
mecánicos considerados, y luego calcular matemáticamente las posiciones, velocidades y
aceleraciones que tales movimientos generan sobre dichos elementos. [2]
2.3.1. Cinemática directa.
Se refiere al estudio del movimiento del robot respecto a un sistema de referencia cartesiano
fijo relacionando la dependencia que existe entre las coordenadas articuladas o
generalizadas, y los parámetros geométricos con coordenadas cartesianas y la orientación
del extremo final del robot.
Además del uso de ecuaciones cinemáticas para calcular la posición de su actuador final a
partir de valores específicos denominados parámetros.
Por otro lado el problema cinemático directo consiste en determinar cuál es la posición y
orientación del extremo final del robot, con respecto a un sistema de coordenadas que se
toma como referencia, conocidos los valores de las articulaciones y los parámetros
geométricos de los elementos del robot.
24
2.3.2. Cinemática inversa
En Robótica, la cinemática inversa (IK) es la técnica que permite determinar el movimiento
de una cadena de articulaciones para lograr que un actuador lineal se ubique en una
posición concreta. El cálculo de la cinemática inversa es un problema complejo que consiste
en la resolución de una serie de ecuaciones cuya solución normalmente no es única.
El objetivo de la cinemática inversa es encontrar los valores que deben tomar las
coordenadas articulares del robot para que su extremo se posicione y oriente según una
determinada localización espacial. Depende de la configuración del robot existen soluciones
múltiples. [2]
2.4. Tipos de movimiento
2.4.1. Rotación pura
El cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al
marco de referencia “estacionario”. Todos los demás puntos del cuerpo describen arcos
alrededor del centro. Una línea de referencia trazada en el cuerpo a través del centro
cambia solo su orientación angular.
2.4.2. Traslación pura
Es el movimiento más simple que puede hacer un cuerpo rígido. Es un cuerpo que tiene un movimiento de traslación pura si un segmento considerado sobre el cuerpo se mueve en el espacio manteniéndose paralelo a sí mismo. Todos los puntos en el dispositivo describen trayectorias paralelas (curvas o rectas). Una línea de referencia trazada en el cuerpo cambia su posición lineal pero no su orientación o posición angular.
2.4.3. Movimiento complejo
Una combinación simultanea de rotación y translación. Cualquier línea de referencia
trazada en el cuerpo cambiara tanto su posición lineal como su orientación angular. Los
puntos en el cuerpo recorrerán trayectorias no paralelas, y habrá, en todo instante, un centro
de rotación, el cual cambiara continuamente de ubicación
2.5. Eslabones y cadenas cinemáticas
2.5.1. Eslabón
Cuerpo rígido (supuesto) que posee por lo menos dos nodos que son puntos de unión con
otros eslabones; el número de nodos le da el nombre al eslabón por ejemplo: binario= dos
nodos, terciario=tres nodos, cuaternario=cuatro nodos etc.
25
2.5.2. Cadena cinemática
Un ensamble de eslabones y juntas interconectados de modo que produzcan un
movimiento controlado en respuesta a un movimiento suministrado.
Elementos que componen una cadena cinemática
Manivela: Eslabón que realiza una revolución competa y esta pivotada a la bancada.
Balancín: Es un eslabón que tiene rotación oscilatoria (de vaivén) y esta pivotado a
la bancada
Acoplador o biela: Es un eslabón que tiene movimiento complejo y no esta pivotado
a la bancada
Bancada: Es cualquier eslabón o eslabones que están fijos (inmóviles) con respecto
al marco de referencia.
2.6. Grados de libertad
El número de grados de libertad de un sistema es el número de parámetros (mediciones)
independientes que se requieren para definir de manera única su posición en el espacio en
cualquier instante de tiempo.
Determinación del grado de libertad
Mecanismo cerrado: No tendrá nodos con apertura y puede tener uno o más grados de
libertad.
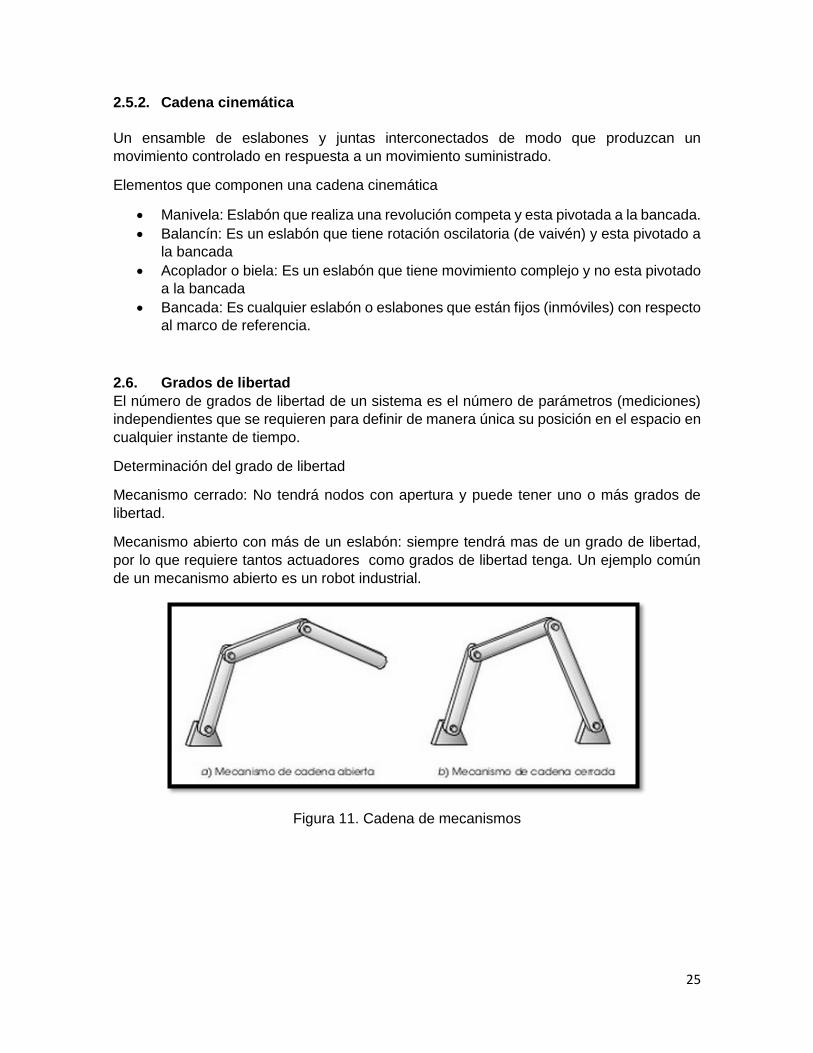
Mecanismo abierto con más de un eslabón: siempre tendrá mas de un grado de libertad,
por lo que requiere tantos actuadores como grados de libertad tenga. Un ejemplo común
de un mecanismo abierto es un robot industrial.
Figura 11. Cadena de mecanismos

26
Diada: es una cadena cinemática abierta de dos eslabones binarios y una junta.
Ecuación de Gruebler:
M= 3L-2J-3G
M= Numero de grados de libertad
L: Numero de eslabones
J: Numero de juntas
G: Numero e eslabones fijados
Ecuación de Kutzbach
M=3(L-1)-2J1-J2
M= Numero de grados de libertad.
L: Numero de eslabones.
J1: Numero de juntas completas.
J2: Numero de semijuntas. [1]
2.7. Post building
Este entorno consiste en satisfacer necesidades específicas de diseñadores, ingenieros, ingenieros de fabricación, programadores de aplicaciones, programadores NC, los administradores de CAD / CAM, y los administradores de sistemas que tienen que crear programas para implementación de máquinas virtuales.
Es una aplicación que proporciona una interfaz gráfica de usuario para la creación de
puestos de trabajo. Además Permite definir muchos aspectos de la producción, incluyendo
las siguientes:
Tipos de bloques de salida y direcciones de palabra.
Secuencia de salida para el siguiente:
- Inicio del programa.
- Comienzo de operaciones.
- Fin de la operación.
- Fin del programa.
- Cambios de herramientas.
- Ciclos fijos.

27
Uno de los resultados del programa de Post Building es una herramienta de archivo de
comandos Command Lenguaje (TCL). Con el conocimiento de la lengua TCL, puede
personalizar ampliamente los scripts TCL.
Post Building actualmente configura post-procesadores para lo siguiente:
fresadoras de 3 ejes
3 ejes centros de fresado y torneado (XZC)
centros de fresado y torneado de varios ejes
fresadoras de 4 ejes con una mesa giratoria o una cabeza giratoria
fresadoras de 5 ejes con cabezales giratorios dobles o mesas giratorias
fresadoras de 5 ejes con cabeza giratoria y mesa giratoria
tornos 2 ejes
2 y 4 ejes máquinas de electroerosión por hilo.
Se proporciona una biblioteca de controlador, con soporte para varios controladores
populares, incluyendo controladores de Siemens Sinumerik. [5]
2.8. Espacio de Trabajo
El espacio de trabajo de un manipulador es definido como el volumen de espacio que el efector final puede alanzar. El espacio de trabajo se subdivide en áreas diferenciadas entre sí: área de trabajo accesible y área de trabajo diestra. El área de trabajo accesible es definida por el conjunto entero de puntos alcanzables por el manipulador al menos en una orientación, mientras que el área de trabajo diestra consiste en los puntos que puede alcanzar con cualquier orientación del elemento final. [3]
2.9. NX SIEMENS
NX, también conocido como Siemens NX o simplemente Unigraphics o U-G, es un paquete
de software CAD/CAM/CAE desarrollado por la compañía Siemens PLM Software (una
unidad de negocios de la división de Siemens Industry Automation).
Sus usos, entre otros, son los siguientes:
Diseño: modelado paramétrico y directo de sólidos/superficies)
Análisis para ingeniería: estático, dinámico, electromagnético y térmico usando
el método de elementos finitos, y análisis de fluidos usando el método de volúmenes
finitos.
Manufactura digital para la industria de la maquinaria. [5]
28
Figura 12. Aplicaciones de NX
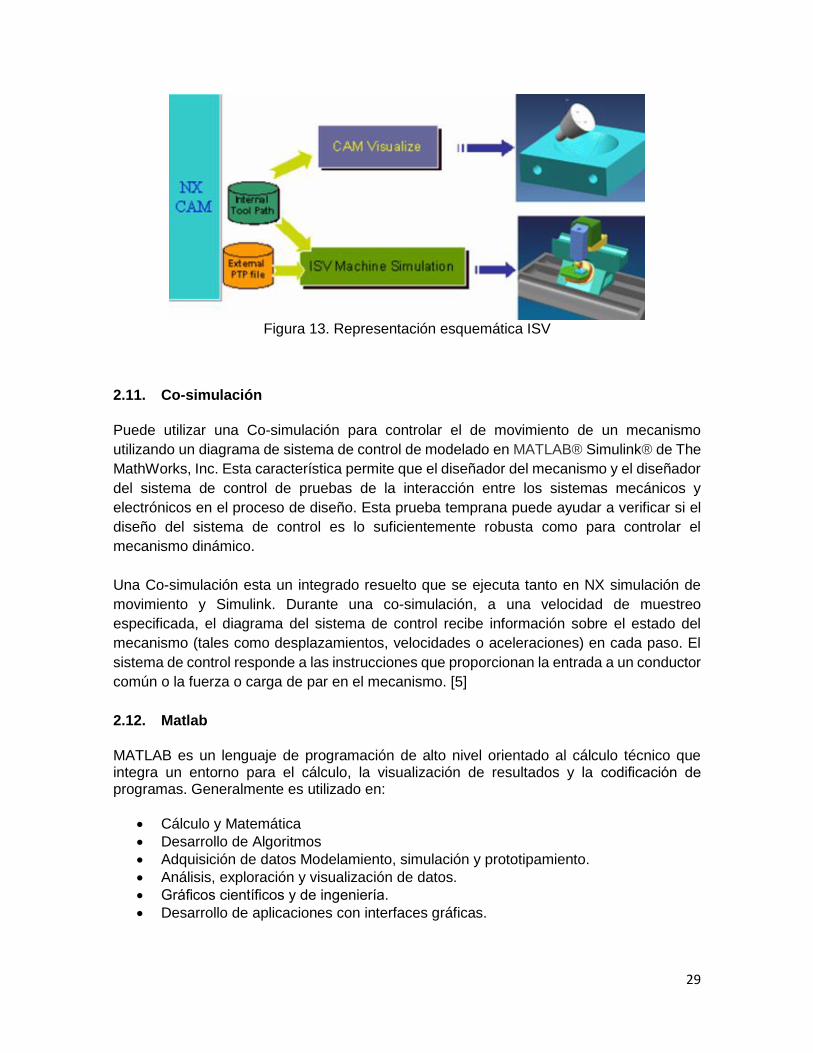
2.10. Integrado de Simulación y Verificación (ISV)
El modulo (ISV) permite simular una máquina herramienta con una pieza real dando una
visión general de un proceso de mecanizado. El proceso de simulación anima los
movimientos de la máquina herramienta, teniendo en cuenta las funciones del controlador
y las configuraciones de la herramienta de corte.
ISV cuenta con control de colisiones que permite la detección de colisiones entre los
componentes de la máquina, accesorios, herramientas, partes y la pieza de trabajo en
proceso. Los límites de recorrido de la máquina también son verificados. También puede
ver las funciones del controlador de la máquina, incluyendo macros, llamadas a subrutinas,
ciclos y funciones M, G y H.
Comparación de la parte diseñada para la parte que está siendo fabricada. ISV consta de
los siguientes componentes:
• Visualización
• Simulación
• Fabricante de la máquina
29
Figura 13. Representación esquemática ISV
2.11. Co-simulación
Puede utilizar una Co-simulación para controlar el de movimiento de un mecanismo
utilizando un diagrama de sistema de control de modelado en MATLAB® Simulink® de The
MathWorks, Inc. Esta característica permite que el diseñador del mecanismo y el diseñador
del sistema de control de pruebas de la interacción entre los sistemas mecánicos y
electrónicos en el proceso de diseño. Esta prueba temprana puede ayudar a verificar si el
diseño del sistema de control es lo suficientemente robusta como para controlar el
mecanismo dinámico.
Una Co-simulación esta un integrado resuelto que se ejecuta tanto en NX simulación de
movimiento y Simulink. Durante una co-simulación, a una velocidad de muestreo
especificada, el diagrama del sistema de control recibe información sobre el estado del
mecanismo (tales como desplazamientos, velocidades o aceleraciones) en cada paso. El
sistema de control responde a las instrucciones que proporcionan la entrada a un conductor
común o la fuerza o carga de par en el mecanismo. [5]
2.12. Matlab
MATLAB es un lenguaje de programación de alto nivel orientado al cálculo técnico que integra un entorno para el cálculo, la visualización de resultados y la codificación de programas. Generalmente es utilizado en:
Cálculo y Matemática
Desarrollo de Algoritmos
Adquisición de datos Modelamiento, simulación y prototipamiento.
Análisis, exploración y visualización de datos.
Gráficos científicos y de ingeniería.
Desarrollo de aplicaciones con interfaces gráficas.
30
Principales Características 1. Lenguaje de programación de alto nivel para cálculo técnico.
2. Entorno de desarrollo para la gestión de código, archivos y datos.
3. Herramientas interactivas para exploración, diseño y resolución de problemas iterativos.
4. Funciones matemáticas para álgebra lineal, estadística, análisis de Fourier, filtraje,
optimización e integración numérica.
5. Funciones gráficas para visualización de datos en 2D y 3D.
6. Herramientas para crear interfaces gráficas de usuario personalizadas.
7. Funciones para integrar algoritmos basados en MATLAB con aplicaciones y lenguajes
externos (C/C++, FORTRAN, Java, COM y Microsoft Excel).
8. Provee Toolboxes, herramientas orientadas a problemas específicos. [4]
2.13. Simulink
Simulink es una herramienta que ofrece un editor gráfico, bibliotecas de bloques
personalizables y un conjunto de solvers, para modelar y simular sistemas dinámicos. Está
basado en un entorno de diagramas de bloque multidominio bajo un diseño basado en
modelos. Simulink permite el diseño y la simulación a nivel de sistema, la generación
automática de código, así como la prueba y verificación continua de los sistemas
embebidos.
La capacidad de integración de Simulink con MATLAB, le permite incorporar algoritmos de
este lenguaje dentro de los modelos Simulink, exportar los resultados de la simulación a
MATLAB para así poder llevar a cabo más análisis.
Dentro del entorno MATLAB, Simulink es un toolbox que se diferencia de los otros, tanto
por su interfaz especial como por la “técnica de programación”. El código fuente del Sistema
Simulink no es abierto. [4]
31
3. Metodología
Para obtener el desarrollo de los objetivos de este proyecto se siguieron los siguientes
pasos:
Modelación
Recopilación
Diseño matemático
Control de posicionamiento y programación
3.1. Modelación Plataforma NX Siemens 10
Por medio de la plataforma CAD/CAM que ofrece el software Siemens NX 10, se logró
realizar el modelamiento de cada una de las partes físicas faltantes de cada uno de los
dispositivos modulares de arquitectura libre para el control de posicionamiento multi-axial,
para ello se tomaron las medidas reales de cada componente que conforma los dispositivos.
Para iniciar a ejecutar el modelamiento, el software cuenta con diferentes opciones de
interfaz, lo que implica varios tipos de roles de trabajo, para mayor comodidad el trabajo
comenzara en el “Role Advanced” que cuenta con menús completos y con esto se
generaran todas las herramientas que el software NX proporciona a todos sus usuarios.
Figura 14. Iconos para selecciónar el role advanced.
Luego procedemos a dar en File → New, por lo que aparecen varias opciones, para este
caso se escogerá el tipo de entorno damos clic en Model; Allí entraremos al entorno (CAD)
del software, donde la plataforma mostrará la pantalla principal donde se realizaran los
nuevos modelos.

32
Figura 15. Ventana para selección de Templates.
El primer paso es escoger la opción “croquis”, en el cual se determinara cuáles serán los
ejes que conformaran el plano de trabajo.
Teniendo este plano se podrá seleccionar alguna de las herramientas del menú que ofrece
el software NX para dibujar las geometrías de cada elemento en 2D;
Figura 16. Herramientas para dibujo en 2D.
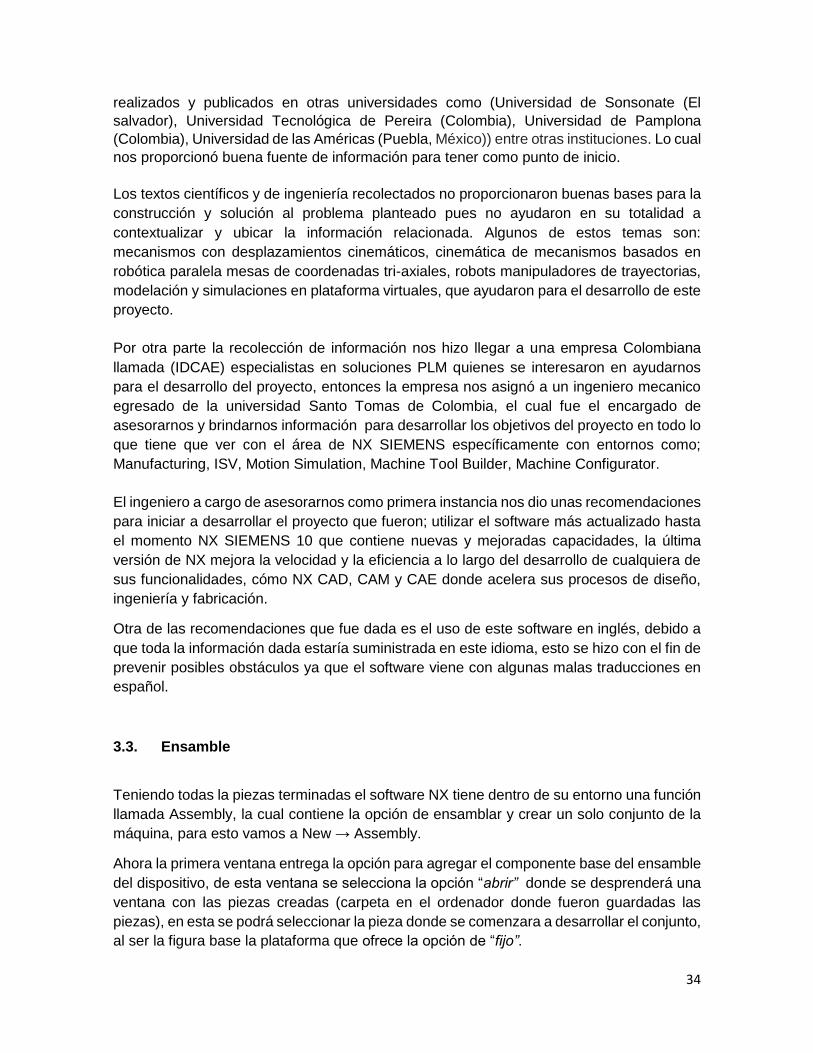
Con estas herramientas se crearán las figuras que se necesitan, entonces para hacer el
modelado 3D se requiere de las siguientes herramientas, las cuales fueron utilizadas
convenientemente a la geometría de cada componente.
33
Figura 17. Herramientas para modelación en 3D.
Figura 18. Elemento extruido visualización 3D.
3.2. Recopilación
La búsqueda y recolección de información desde el inicio se había planteado como fuente
de información un ingeniero egresado de la Universidad Santo Tomas el cual realizo varios
proyectos con tecnologías CAD-CAM, ideal para el suministro de información así como su
asesoría para poder llevar a cabo el desarrollo de los objetivos del proyecto. Lo cual no se
llegó a realizar debido a que este ingeniero ya no se encuentra erradicado en Colombia y
desde luego el contacto con él no se logró.
La búsqueda y recolección de información para el desarrollo de este proyecto se tomaron
en consideración diferentes fuentes de consulta. Una de ellas fue la base de datos de la
universidad distrital francisco José de Caldas que posee artículos especializados como
fuentes de ayuda para investigación a nivel mundial, como también artículos y trabajos
34
realizados y publicados en otras universidades como (Universidad de Sonsonate (El
salvador), Universidad Tecnológica de Pereira (Colombia), Universidad de Pamplona
(Colombia), Universidad de las Américas (Puebla, México)) entre otras instituciones. Lo cual
nos proporcionó buena fuente de información para tener como punto de inicio.
Los textos científicos y de ingeniería recolectados no proporcionaron buenas bases para la
construcción y solución al problema planteado pues no ayudaron en su totalidad a
contextualizar y ubicar la información relacionada. Algunos de estos temas son:
mecanismos con desplazamientos cinemáticos, cinemática de mecanismos basados en
robótica paralela mesas de coordenadas tri-axiales, robots manipuladores de trayectorias,
modelación y simulaciones en plataforma virtuales, que ayudaron para el desarrollo de este
proyecto.
Por otra parte la recolección de información nos hizo llegar a una empresa Colombiana
llamada (IDCAE) especialistas en soluciones PLM quienes se interesaron en ayudarnos
para el desarrollo del proyecto, entonces la empresa nos asignó a un ingeniero mecanico
egresado de la universidad Santo Tomas de Colombia, el cual fue el encargado de
asesorarnos y brindarnos información para desarrollar los objetivos del proyecto en todo lo
que tiene que ver con el área de NX SIEMENS específicamente con entornos como;
Manufacturing, ISV, Motion Simulation, Machine Tool Builder, Machine Configurator.
El ingeniero a cargo de asesorarnos como primera instancia nos dio unas recomendaciones
para iniciar a desarrollar el proyecto que fueron; utilizar el software más actualizado hasta
el momento NX SIEMENS 10 que contiene nuevas y mejoradas capacidades, la última
versión de NX mejora la velocidad y la eficiencia a lo largo del desarrollo de cualquiera de
sus funcionalidades, cómo NX CAD, CAM y CAE donde acelera sus procesos de diseño,
ingeniería y fabricación.
Otra de las recomendaciones que fue dada es el uso de este software en inglés, debido a
que toda la información dada estaría suministrada en este idioma, esto se hizo con el fin de
prevenir posibles obstáculos ya que el software viene con algunas malas traducciones en
español.
3.3. Ensamble
Teniendo todas la piezas terminadas el software NX tiene dentro de su entorno una función
llamada Assembly, la cual contiene la opción de ensamblar y crear un solo conjunto de la
máquina, para esto vamos a New → Assembly.
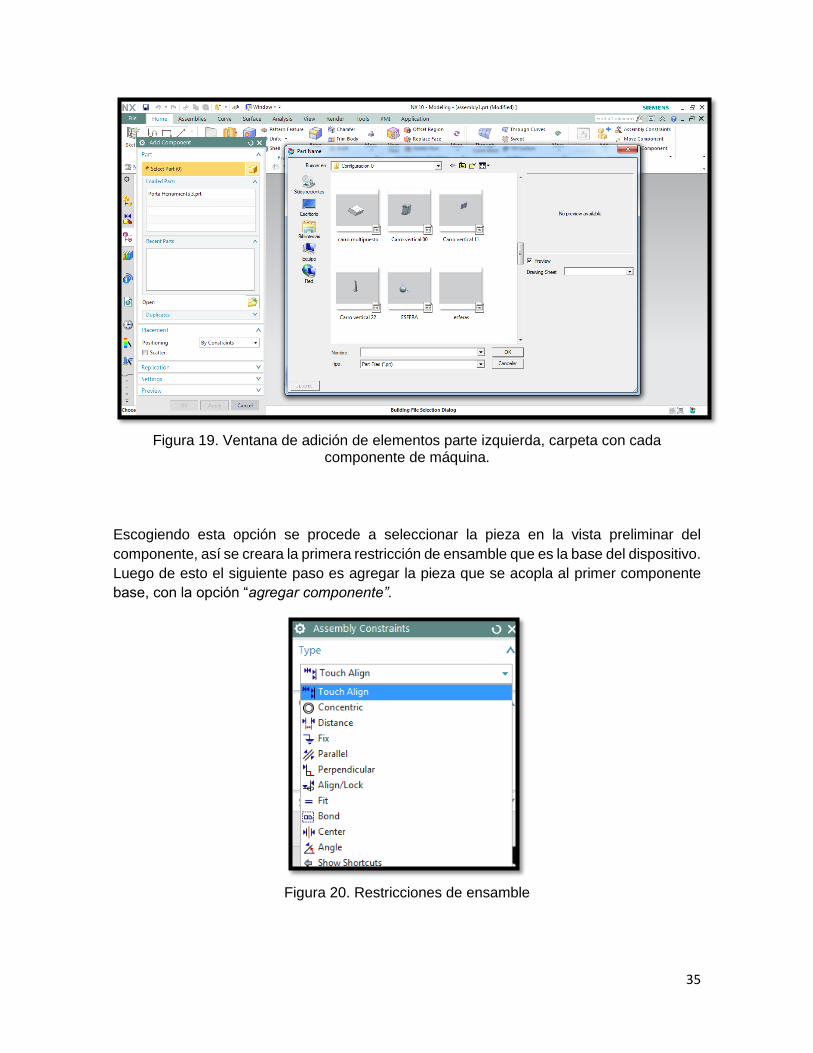
Ahora la primera ventana entrega la opción para agregar el componente base del ensamble
del dispositivo, de esta ventana se selecciona la opción “abrir” donde se desprenderá una
ventana con las piezas creadas (carpeta en el ordenador donde fueron guardadas las
piezas), en esta se podrá seleccionar la pieza donde se comenzara a desarrollar el conjunto,
al ser la figura base la plataforma que ofrece la opción de “fijo”.
35
Figura 19. Ventana de adición de elementos parte izquierda, carpeta con cada
componente de máquina.
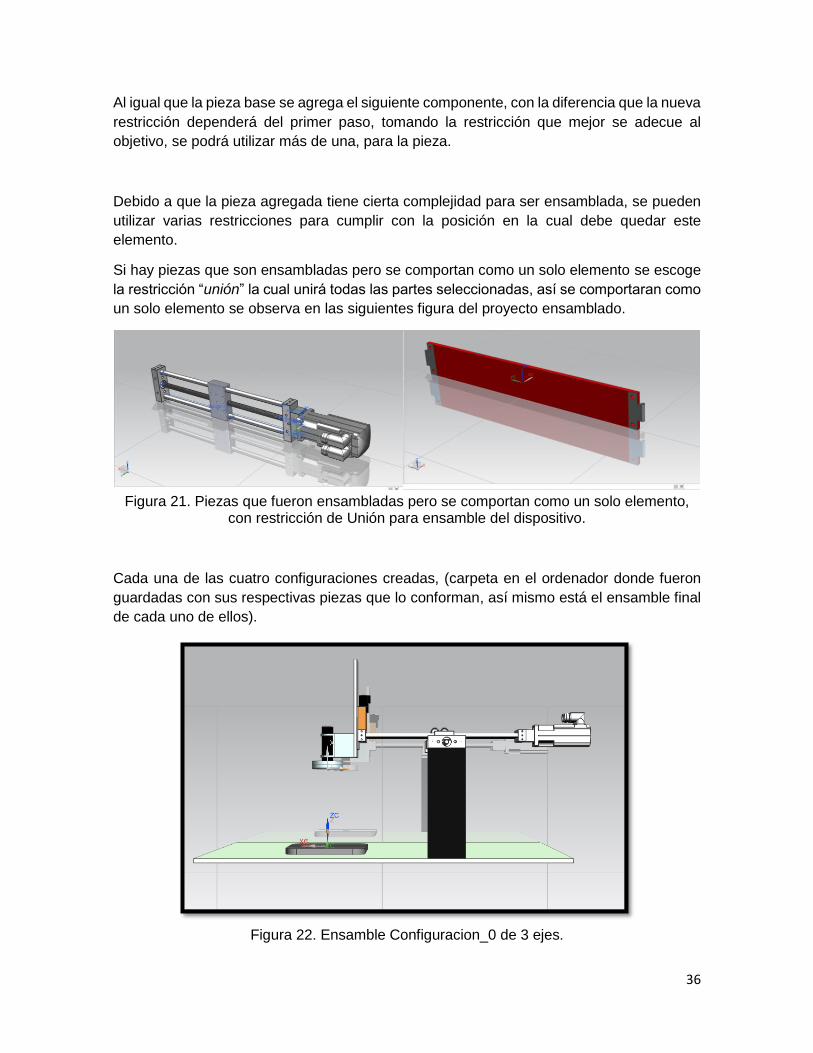
Escogiendo esta opción se procede a seleccionar la pieza en la vista preliminar del
componente, así se creara la primera restricción de ensamble que es la base del dispositivo.
Luego de esto el siguiente paso es agregar la pieza que se acopla al primer componente
base, con la opción “agregar componente”.
Figura 20. Restricciones de ensamble
36
Al igual que la pieza base se agrega el siguiente componente, con la diferencia que la nueva
restricción dependerá del primer paso, tomando la restricción que mejor se adecue al
objetivo, se podrá utilizar más de una, para la pieza.
Debido a que la pieza agregada tiene cierta complejidad para ser ensamblada, se pueden
utilizar varias restricciones para cumplir con la posición en la cual debe quedar este
elemento.
Si hay piezas que son ensambladas pero se comportan como un solo elemento se escoge
la restricción “unión” la cual unirá todas las partes seleccionadas, así se comportaran como
un solo elemento se observa en las siguientes figura del proyecto ensamblado.
Figura 21. Piezas que fueron ensambladas pero se comportan como un solo elemento,
con restricción de Unión para ensamble del dispositivo.
Cada una de las cuatro configuraciones creadas, (carpeta en el ordenador donde fueron
guardadas con sus respectivas piezas que lo conforman, así mismo está el ensamble final
de cada uno de ellos).
Figura 22. Ensamble Configuracion_0 de 3 ejes.

37
3.4. Diseño matemático
El diseño matemático se centra en el estudio de la cinemática directa de las distintas
configuraciones que tiene el dispositivo de arquitectura libre estudiado. Ya que esta permite
determinar la posición y la orientación del efector final a partir de los valores de las
coordenadas articulares.
Utilizando un método analítico para el análisis de la geometría de las configuraciones
estudiadas respecto a un sistema de referencia cartesiano (Xo, Yo, Zo), donde se relaciona
la dependencia entre eslabones mediante una cadena cinemática. Exceptuando la primera
de las configuraciones FIG. Que fue estudiada mediante el método Denavit-Hartemberg en
la parte primera parte del trabajo, que consistía en el diseño y construcción del mecanismo
realizada por compañeros de ingeniería.
Figura 23. Modelado NX configuración 0
En el desarrollo de los parámetros y ecuaciones planteados para las distintas
configuraciones del dispositivo se utilizó el programa MATLAB R2015a para la obtención
de los resultados teóricos.
Figura 24 software MATLAB R2015a
38
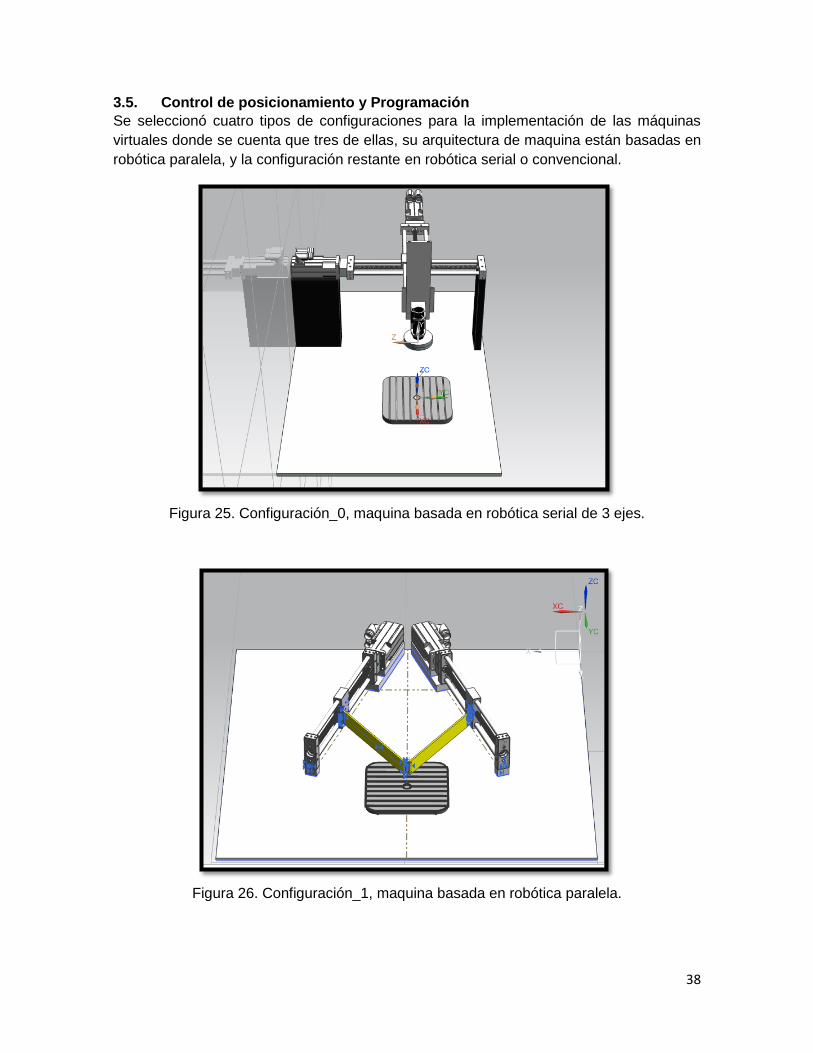
3.5. Control de posicionamiento y Programación
Se seleccionó cuatro tipos de configuraciones para la implementación de las máquinas
virtuales donde se cuenta que tres de ellas, su arquitectura de maquina están basadas en
robótica paralela, y la configuración restante en robótica serial o convencional.
Figura 25. Configuración_0, maquina basada en robótica serial de 3 ejes.
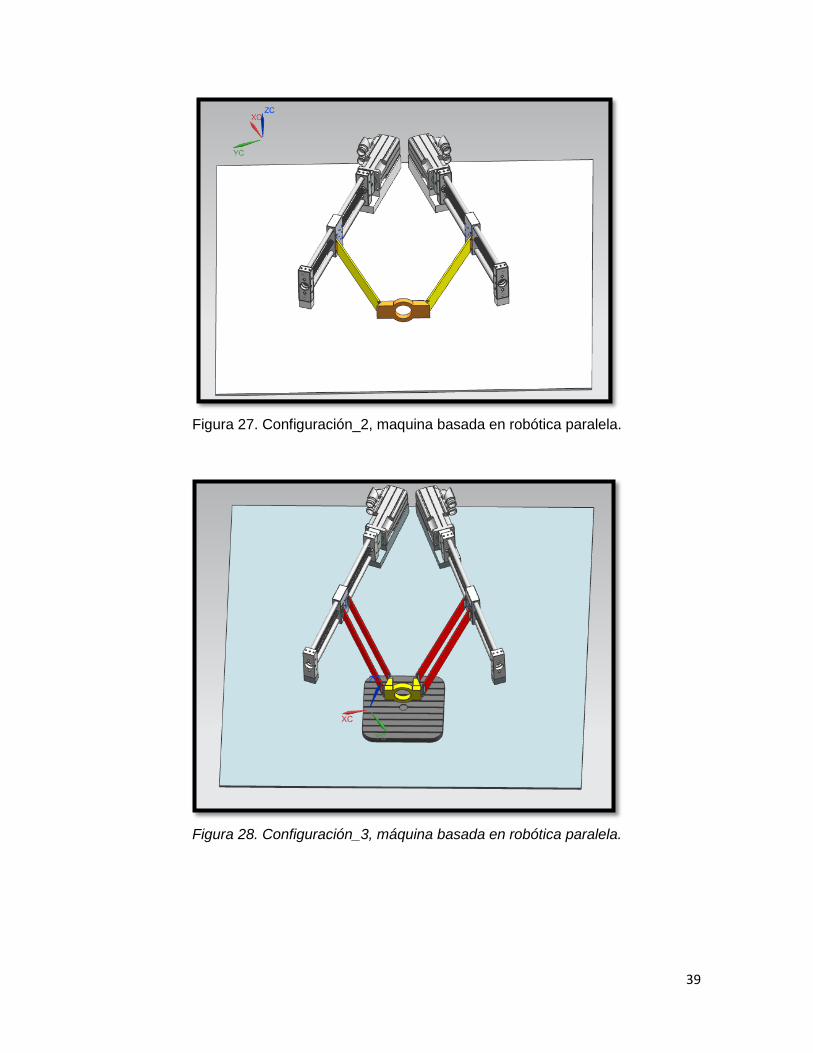
Figura 26. Configuración_1, maquina basada en robótica paralela.
39
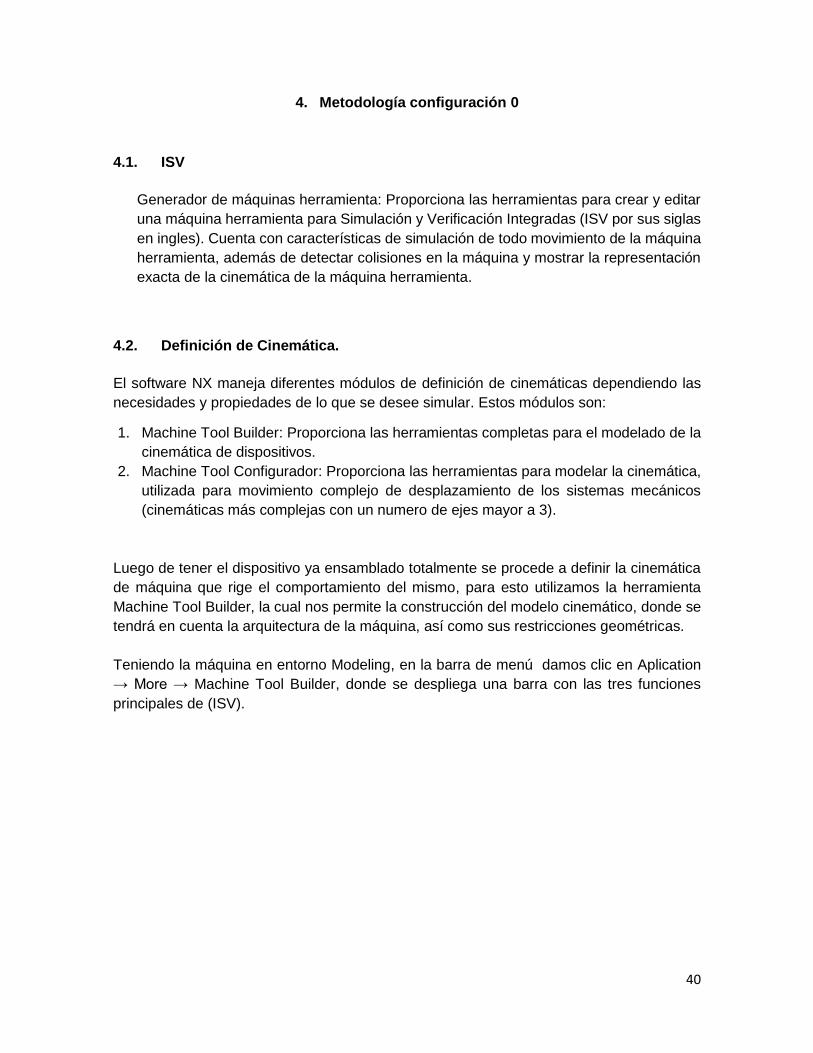
Figura 27. Configuración_2, maquina basada en robótica paralela.
Figura 28. Configuración_3, máquina basada en robótica paralela.
40
4. Metodología configuración 0
4.1. ISV
Generador de máquinas herramienta: Proporciona las herramientas para crear y editar
una máquina herramienta para Simulación y Verificación Integradas (ISV por sus siglas
en ingles). Cuenta con características de simulación de todo movimiento de la máquina
herramienta, además de detectar colisiones en la máquina y mostrar la representación
exacta de la cinemática de la máquina herramienta.
4.2. Definición de Cinemática.
El software NX maneja diferentes módulos de definición de cinemáticas dependiendo las
necesidades y propiedades de lo que se desee simular. Estos módulos son:
1. Machine Tool Builder: Proporciona las herramientas completas para el modelado de la
cinemática de dispositivos.
2. Machine Tool Configurador: Proporciona las herramientas para modelar la cinemática,
utilizada para movimiento complejo de desplazamiento de los sistemas mecánicos
(cinemáticas más complejas con un numero de ejes mayor a 3).
Luego de tener el dispositivo ya ensamblado totalmente se procede a definir la cinemática
de máquina que rige el comportamiento del mismo, para esto utilizamos la herramienta
Machine Tool Builder, la cual nos permite la construcción del modelo cinemático, donde se
tendrá en cuenta la arquitectura de la máquina, así como sus restricciones geométricas.
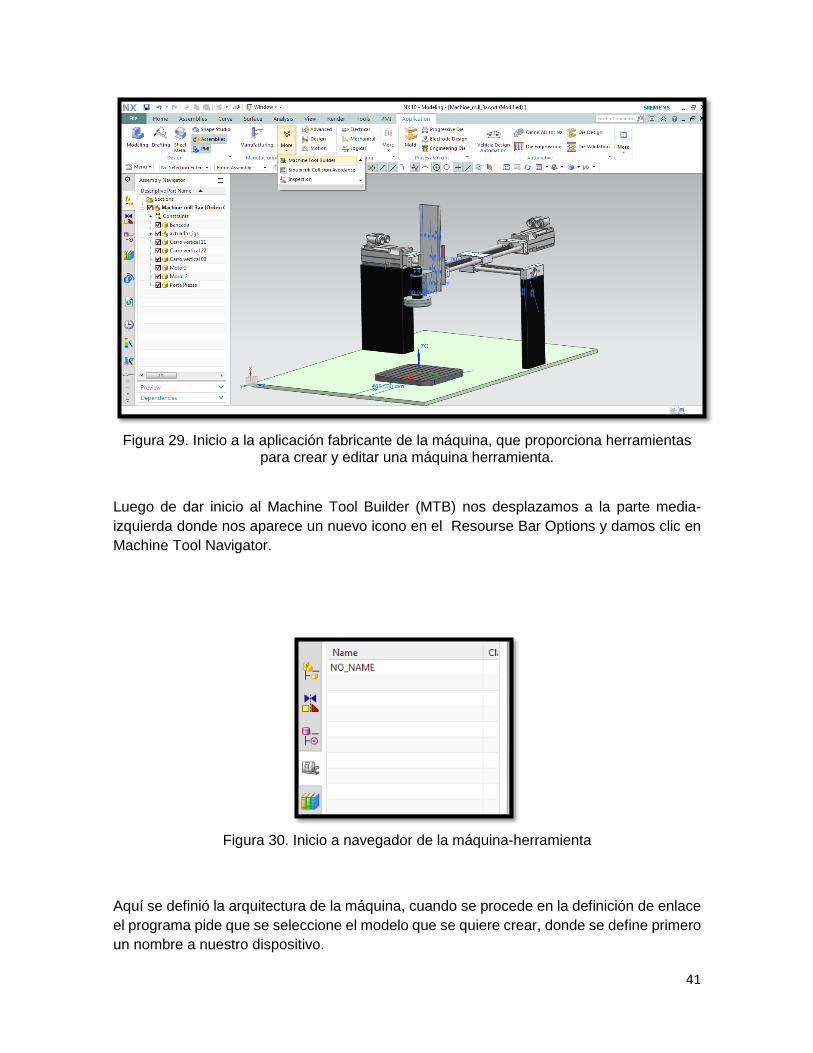
Teniendo la máquina en entorno Modeling, en la barra de menú damos clic en Aplication
→ More → Machine Tool Builder, donde se despliega una barra con las tres funciones
principales de (ISV).
41
Figura 29. Inicio a la aplicación fabricante de la máquina, que proporciona herramientas
para crear y editar una máquina herramienta.
Luego de dar inicio al Machine Tool Builder (MTB) nos desplazamos a la parte media-
izquierda donde nos aparece un nuevo icono en el Resourse Bar Options y damos clic en
Machine Tool Navigator.
Figura 30. Inicio a navegador de la máquina-herramienta
Aquí se definió la arquitectura de la máquina, cuando se procede en la definición de enlace
el programa pide que se seleccione el modelo que se quiere crear, donde se define primero
un nombre a nuestro dispositivo.
42
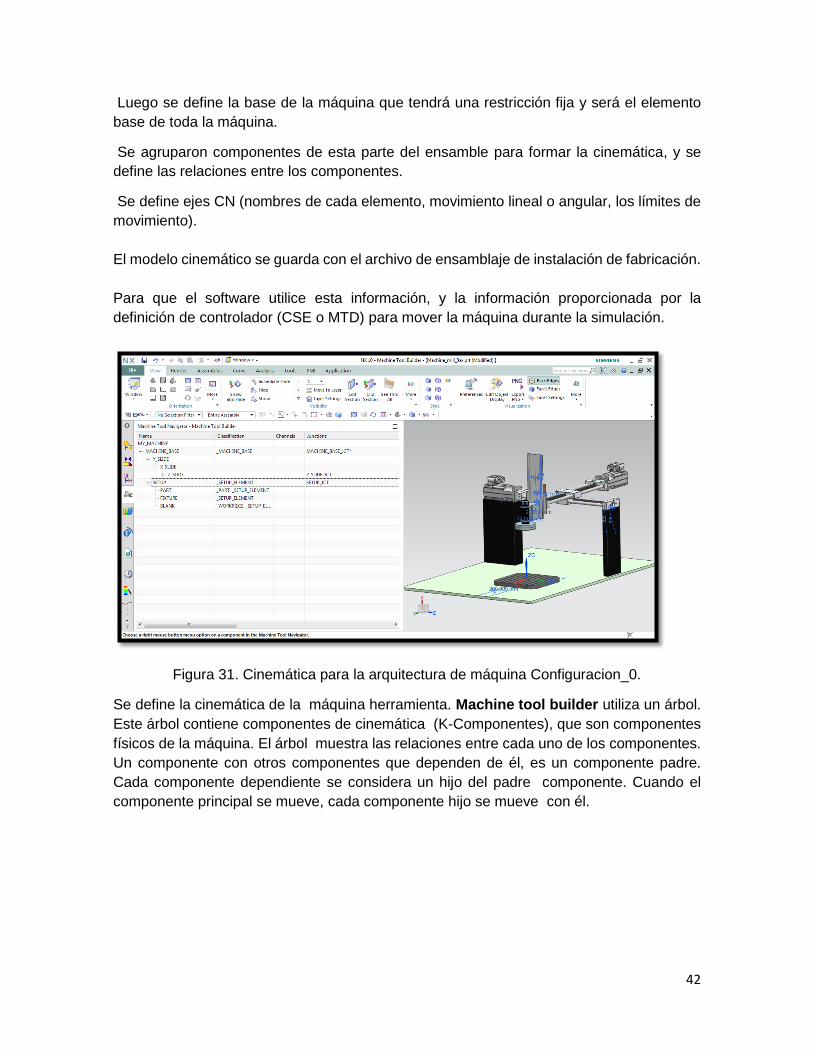
Luego se define la base de la máquina que tendrá una restricción fija y será el elemento
base de toda la máquina.
Se agruparon componentes de esta parte del ensamble para formar la cinemática, y se
define las relaciones entre los componentes.
Se define ejes CN (nombres de cada elemento, movimiento lineal o angular, los límites de
movimiento).
El modelo cinemático se guarda con el archivo de ensamblaje de instalación de fabricación.
Para que el software utilice esta información, y la información proporcionada por la
definición de controlador (CSE o MTD) para mover la máquina durante la simulación.
Figura 31. Cinemática para la arquitectura de máquina Configuracion_0.
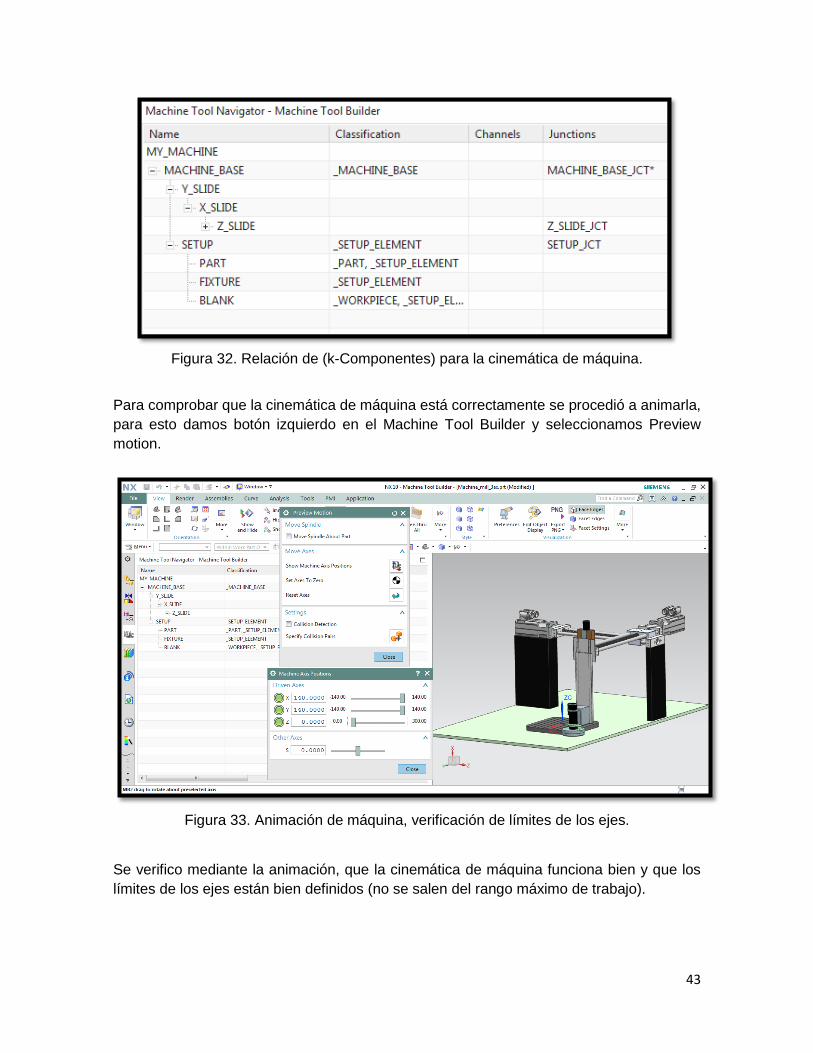
Se define la cinemática de la máquina herramienta. Machine tool builder utiliza un árbol.
Este árbol contiene componentes de cinemática (K-Componentes), que son componentes
físicos de la máquina. El árbol muestra las relaciones entre cada uno de los componentes.
Un componente con otros componentes que dependen de él, es un componente padre.
Cada componente dependiente se considera un hijo del padre componente. Cuando el
componente principal se mueve, cada componente hijo se mueve con él.
43
Figura 32. Relación de (k-Componentes) para la cinemática de máquina.
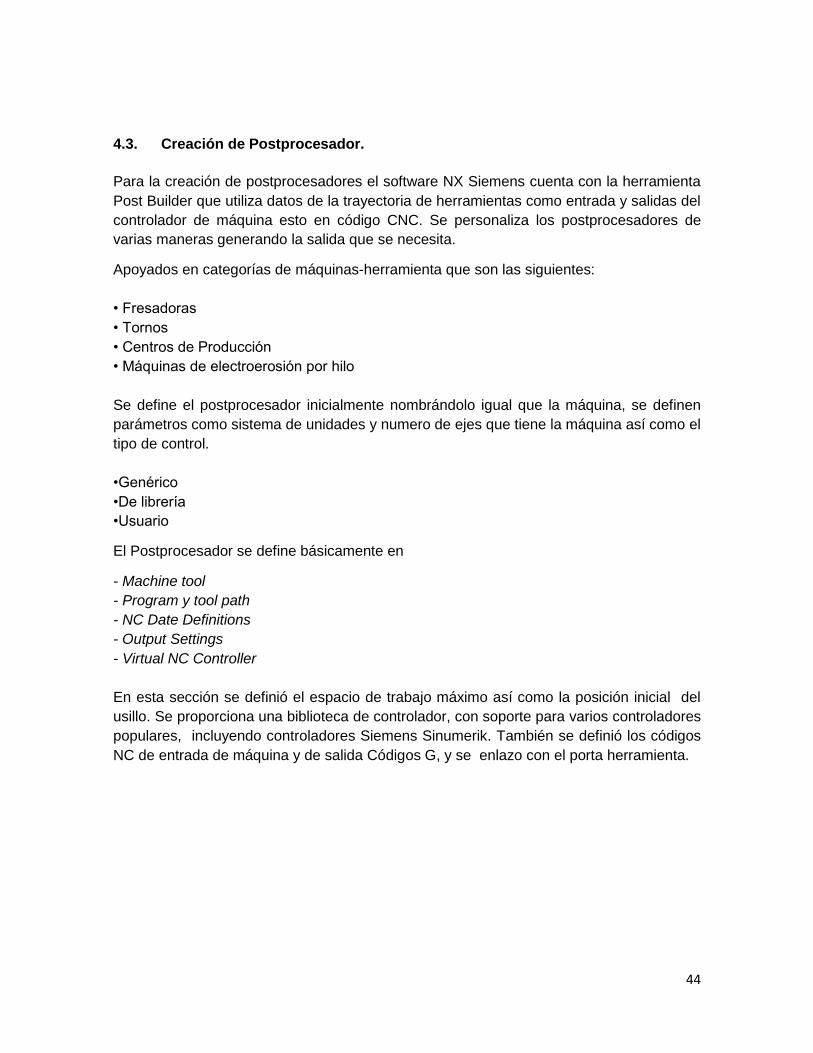
Para comprobar que la cinemática de máquina está correctamente se procedió a animarla,
para esto damos botón izquierdo en el Machine Tool Builder y seleccionamos Preview
motion.
Figura 33. Animación de máquina, verificación de límites de los ejes.
Se verifico mediante la animación, que la cinemática de máquina funciona bien y que los
límites de los ejes están bien definidos (no se salen del rango máximo de trabajo).
44
4.3. Creación de Postprocesador.
Para la creación de postprocesadores el software NX Siemens cuenta con la herramienta
Post Builder que utiliza datos de la trayectoria de herramientas como entrada y salidas del
controlador de máquina esto en código CNC. Se personaliza los postprocesadores de
varias maneras generando la salida que se necesita.
Apoyados en categorías de máquinas-herramienta que son las siguientes:
• Fresadoras
• Tornos
• Centros de Producción
• Máquinas de electroerosión por hilo
Se define el postprocesador inicialmente nombrándolo igual que la máquina, se definen
parámetros como sistema de unidades y numero de ejes que tiene la máquina así como el
tipo de control.
•Genérico
•De librería
•Usuario
El Postprocesador se define básicamente en
- Machine tool
- Program y tool path
- NC Date Definitions
- Output Settings
- Virtual NC Controller
En esta sección se definió el espacio de trabajo máximo así como la posición inicial del
usillo. Se proporciona una biblioteca de controlador, con soporte para varios controladores
populares, incluyendo controladores Siemens Sinumerik. También se definió los códigos
NC de entrada de máquina y de salida Códigos G, y se enlazo con el porta herramienta.

45
Figura 34. Entorno de generador de postprocesadores.
4.4. Adición de la máquina a la biblioteca
La máquina se añadió a la biblioteca del software donde ya están ensambladas de fábrica
otras máquinas que aparecen en el entorno fabricación, esto para ser llamada desde el
entorno y así ser utilizada para la simulación. La biblioteca de máquina se almacena en el
archivo ASCII $ UGII_CAM_LIBRARY_MACHINE_DIR \ ascii \ machine_database.dat. Los
archivos contienen entradas para la librería como lo es tipo de máquina, fabricante,
descripción de la máquina, controlador, postprocesador y un factor de rigidez.
Figura 35. Líneas de código para añadir la máquina a la librería de Siemens NX.
46
Luego de esto en la dirección Siemens / NX10.0 /MACH /resource /library /machine
/installed_machines. Aquí se creó una carpeta con el mismo nombre de la máquina en la
cual hay dos subcarpetas que tienen los archivos del postprocesador, así como las gráficas
del ensamble de máquina.
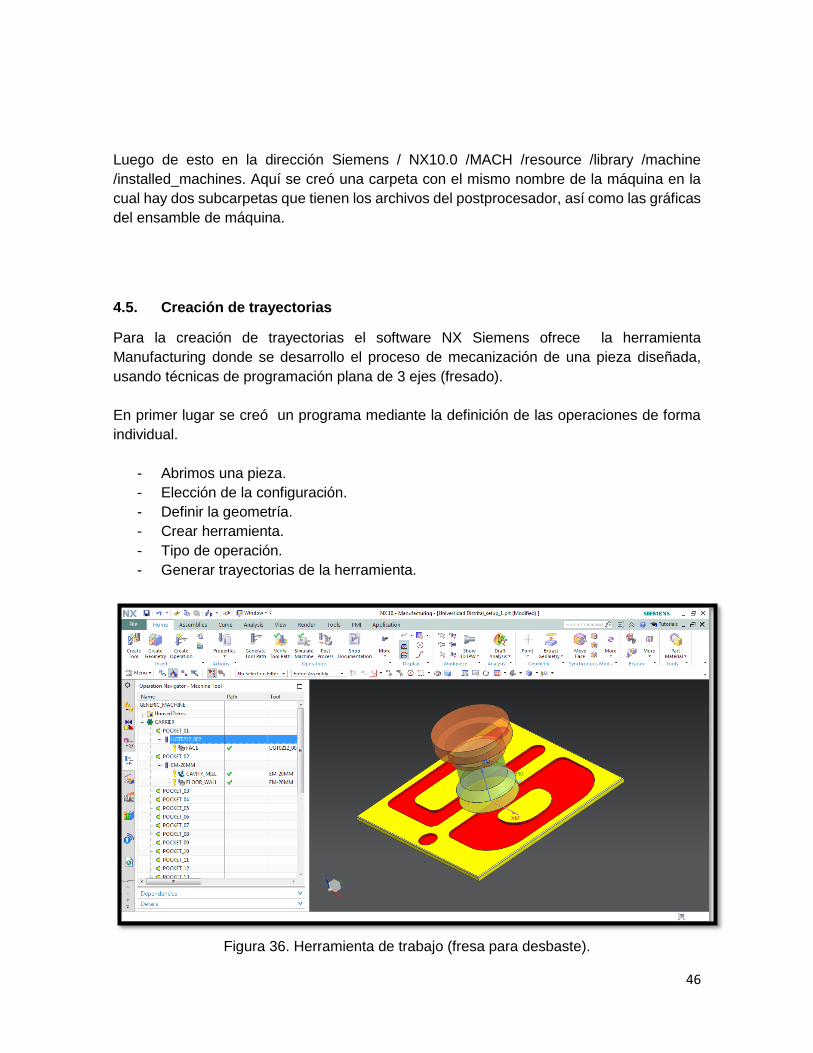
4.5. Creación de trayectorias
Para la creación de trayectorias el software NX Siemens ofrece la herramienta
Manufacturing donde se desarrollo el proceso de mecanización de una pieza diseñada,
usando técnicas de programación plana de 3 ejes (fresado).
En primer lugar se creó un programa mediante la definición de las operaciones de forma
individual.
- Abrimos una pieza.
- Elección de la configuración.
- Definir la geometría.
- Crear herramienta.
- Tipo de operación.
- Generar trayectorias de la herramienta.
Figura 36. Herramienta de trabajo (fresa para desbaste).
47
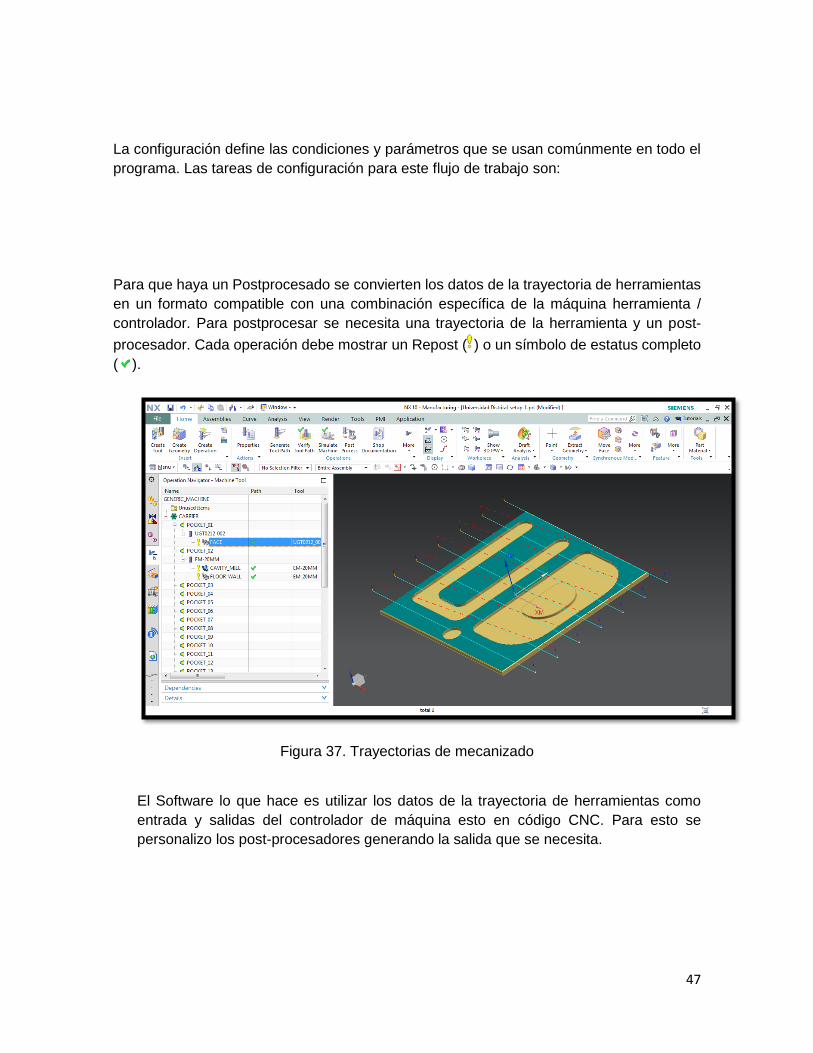
La configuración define las condiciones y parámetros que se usan comúnmente en todo el
programa. Las tareas de configuración para este flujo de trabajo son:
Para que haya un Postprocesado se convierten los datos de la trayectoria de herramientas
en un formato compatible con una combinación específica de la máquina herramienta /
controlador. Para postprocesar se necesita una trayectoria de la herramienta y un post-
procesador. Cada operación debe mostrar un Repost ( ) o un símbolo de estatus completo
( ).
Figura 37. Trayectorias de mecanizado
El Software lo que hace es utilizar los datos de la trayectoria de herramientas como
entrada y salidas del controlador de máquina esto en código CNC. Para esto se
personalizo los post-procesadores generando la salida que se necesita.

48
4.4. Diseño matemático
4.4.1. Modelación cinemática directa.
Por medio del método Denavit-Hartember se realizó el modelado de la cinemática directa
de la configuración cero siguiendo una serie de pasos que se mencionaran a continuación:
𝜃𝑖: (Movimiento angular en rotación) es el ángulo que forman los ejes xi-1 y xi medido en
un plano perpendicular al eje zi-1 utilizando la regla de la mano derecha (es variable en
articulaciones giratorias)
𝑑𝑖: (Movimiento lineal en prismáticas) es la distancia a lo largo del eje zi-1, desde el origen
del sistema de coordenadas i-1, hasta la intersección con el eje xi. (Variable en
articulaciones prismáticas)
𝑎𝑖 : En el caso de articulaciones giratorias, es la distancia a lo lardo del eje xi que va desde
la intersección con el eje zi-1 hasta el origen del sistema i pero en el caso de articulaciones
prismáticas, es la distancia más corta entre los ejes zi y zi-1
∝𝑖 : es el Angulo de separación del eje zi-1 y el eje zi, medio en un plano perpendicular al
eje xi.
Utilizando la regla de la mano derecha
Al realizar la formulación del método Denavit-Hartemberg esta queda expresada en
términos de matrices de transformación homogéneas con estricto orden de transformación
de traslación y rotación.
Formulación método Denavit-Hartemberg. [3]
Para esto se definen algunas de las características que posee cada eslabón.
Eslabón ∝𝑖 𝜃𝑖 𝑑𝑖 𝑎𝑖
1 90 90 d1 0
2 90 -90 d2 0
Utilizando la formulación se obtienen las matrices homogéneas para cada eslabón

49
La matriz resultante T indica la posición y orientación del sistema de coordenadas de la
plataforma o porta-herramienta con respecto al sistema de coordenadas de la base del
dispositivo. Además se realiza la comprobación matemática en MATLAB y se encuentra a
continuación
Figura 38. Código de programación. Cinemática directa de la configuración cero

50
4.4.2. Modelamiento cinemática inversa para la configuración cero
Para el problema de la cinemática inversa, la localización del efector final está dada y el
problema es encontrar los ángulos de las juntas necesarios para traer el efector final a la
localización deseada. La metodología para dar solución a este problema es:
1. A partir de la matriz de transformación homogénea T que para esta configuración
fue calculada anteriormente.
2. Luego de haber obtenido la matriz se procede a calcular la inversa de cada matriz
𝐴𝑖, por lo que la matriz inversa esta dada por
Por lo que las matrices inversas correspondientes son:
Ya que la configuración cero es cartesiana, el cálculo de la cinemática inversa no
presenta gran dificultad. Motivo por el cual la cinemática inversa se calcula por medio
de MATLAB generando un código de programación mostrado a continuación:
Figura 39. Código cinemática inversa del dispositivo para la configuración cartesiana o configuración cero
51
5. Metodología Configuración_1
Para la realización de este proyecto se van a seguir los siguientes pasos
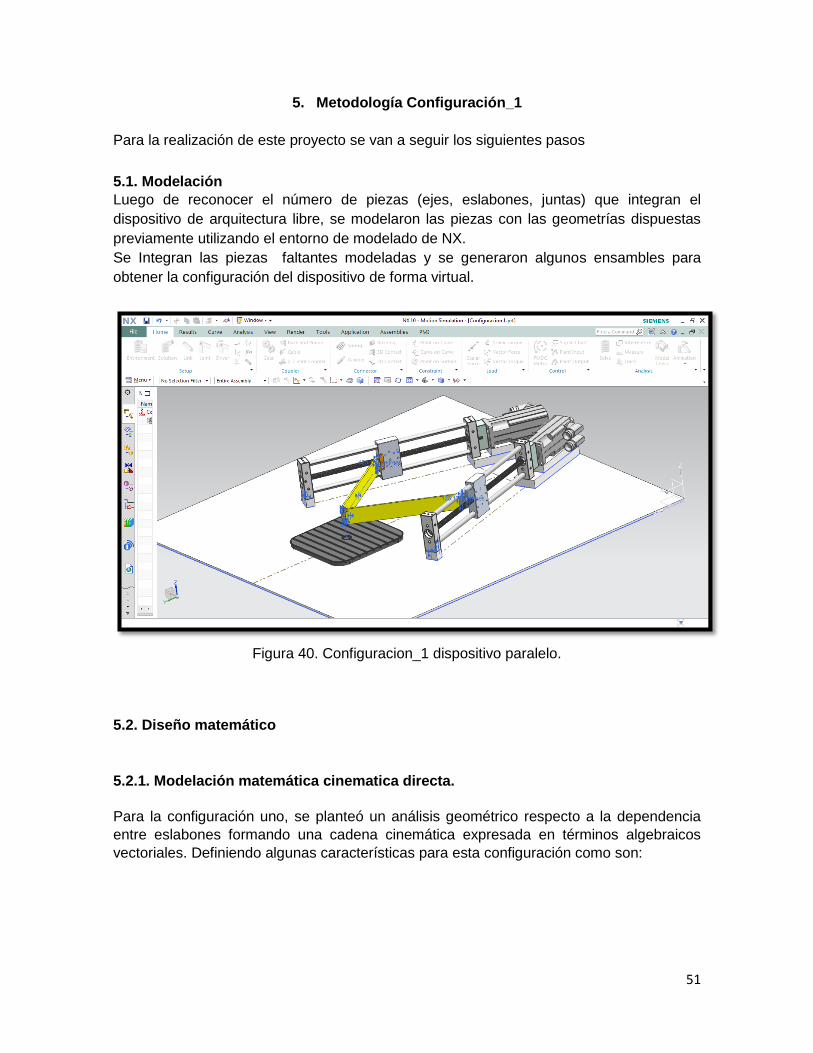
5.1. Modelación
Luego de reconocer el número de piezas (ejes, eslabones, juntas) que integran el
dispositivo de arquitectura libre, se modelaron las piezas con las geometrías dispuestas
previamente utilizando el entorno de modelado de NX.
Se Integran las piezas faltantes modeladas y se generaron algunos ensambles para
obtener la configuración del dispositivo de forma virtual.
Figura 40. Configuracion_1 dispositivo paralelo.
5.2. Diseño matemático
5.2.1. Modelación matemática cinematica directa.
Para la configuración uno, se planteó un análisis geométrico respecto a la dependencia
entre eslabones formando una cadena cinemática expresada en términos algebraicos
vectoriales. Definiendo algunas características para esta configuración como son:

52
𝐸1 = 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑠𝑜𝑏𝑟𝑒 𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛 1
𝜃1 = 𝐴𝑛𝑔𝑢𝑙𝑜 𝑓𝑜𝑟𝑚𝑎𝑑𝑜 𝑒𝑛𝑡𝑟𝑒 𝑒𝑙 𝑒𝑗𝑒 𝑦 𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛
𝐸2 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑒𝑠𝑙𝑎𝑏𝑜𝑛
𝛼 = Á𝑛𝑔𝑢𝑙𝑜 𝑓𝑜𝑟𝑚𝑎𝑑𝑜 𝑝𝑜𝑟 𝑒𝑙 𝑐𝑎𝑟𝑟𝑜 𝑑𝑒 𝑑𝑒𝑠𝑙𝑖𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛 1
Figura 41. Esquema primera cadena cinemática configuración uno.
De la geometría de la figura 11, el lazo vectorial de ecuaciones puede ser escrito como:
𝐴𝐺̅̅ ̅̅ = 𝐴𝐵̅̅ ̅̅ + 𝐵𝐼̅̅ ̅ + 𝐼𝐺̅̅ ̅ (5.2.1.1)
Expresando el lazo vectorial de ecuaciones respecto al marco de referencia de
coordenadas dadas.
𝑋𝐺 = 𝑋𝐴 + 𝐿1 cos 𝜃1 + 𝑏 cos 𝛼 + 𝐸1 cos 𝜃2 (5.2.1.2)
𝑌𝐺 = 𝑌𝐴 + 𝐿1 sin 𝜃1 + 𝑏 sin 𝛼 + 𝐸1 sin 𝜃2 ((5.2.1.3)
Sumando los cuadrados de las dos ecuaciones anteriores
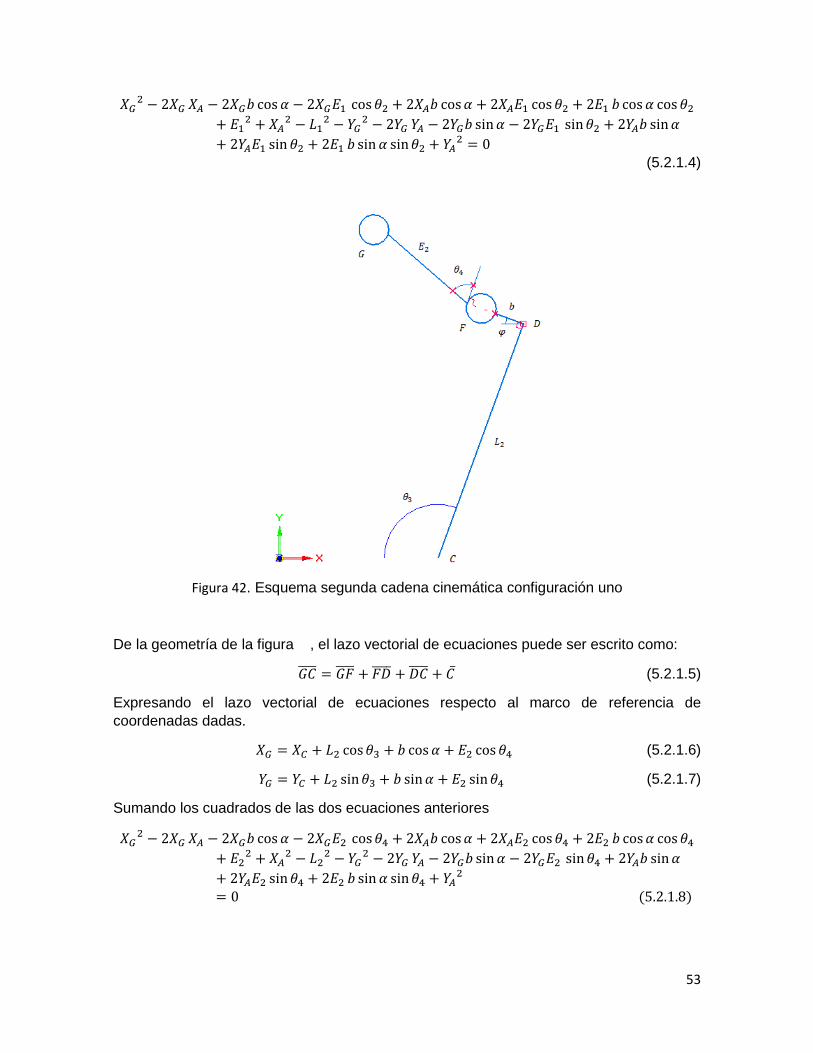
53
𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 − 2𝑋𝐺𝐸1 cos 𝜃2 + 2𝑋𝐴𝑏 cos 𝛼 + 2𝑋𝐴𝐸1 cos 𝜃2 + 2𝐸1 𝑏 cos 𝛼 cos 𝜃2
+ 𝐸12 + 𝑋𝐴
2 − 𝐿12 − 𝑌𝐺
2 − 2𝑌𝐺 𝑌𝐴 − 2𝑌𝐺𝑏 sin 𝛼 − 2𝑌𝐺𝐸1 sin 𝜃2 + 2𝑌𝐴𝑏 sin 𝛼
+ 2𝑌𝐴𝐸1 sin 𝜃2 + 2𝐸1 𝑏 sin 𝛼 sin 𝜃2 + 𝑌𝐴2 = 0
(5.2.1.4)
Figura 42. Esquema segunda cadena cinemática configuración uno
De la geometría de la figura , el lazo vectorial de ecuaciones puede ser escrito como:
𝐺𝐶̅̅ ̅̅ = 𝐺𝐹̅̅ ̅̅ + 𝐹𝐷̅̅ ̅̅ + 𝐷𝐶̅̅ ̅̅ + 𝐶̅ (5.2.1.5)
Expresando el lazo vectorial de ecuaciones respecto al marco de referencia de
coordenadas dadas.
𝑋𝐺 = 𝑋𝐶 + 𝐿2 cos 𝜃3 + 𝑏 cos 𝛼 + 𝐸2 cos 𝜃4 (5.2.1.6)
𝑌𝐺 = 𝑌𝐶 + 𝐿2 sin 𝜃3 + 𝑏 sin 𝛼 + 𝐸2 sin 𝜃4 (5.2.1.7)
Sumando los cuadrados de las dos ecuaciones anteriores
𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 − 2𝑋𝐺𝐸2 cos 𝜃4 + 2𝑋𝐴𝑏 cos 𝛼 + 2𝑋𝐴𝐸2 cos 𝜃4 + 2𝐸2 𝑏 cos 𝛼 cos 𝜃4
+ 𝐸22 + 𝑋𝐴
2 − 𝐿22 − 𝑌𝐺
2 − 2𝑌𝐺 𝑌𝐴 − 2𝑌𝐺𝑏 sin 𝛼 − 2𝑌𝐺𝐸2 sin 𝜃4 + 2𝑌𝐴𝑏 sin 𝛼
+ 2𝑌𝐴𝐸2 sin 𝜃4 + 2𝐸2 𝑏 sin 𝛼 sin 𝜃4 + 𝑌𝐴2
= 0 (5.2.1.8)

54
5.2.2. Modelación matemática cinemática inversa
Para la el cálculo de la cinemática inversa, 𝑋𝐺, 𝑌𝐺, están dados, y los ángulos 𝜃2, 𝜃4,
deberán ser hallados. Para la primera cadena se organiza la ecuación (5.2.1.4) de la
siguiente forma:
𝑒1 sin 𝜃2 + 𝑒2 cos 𝜃2 + 𝑒3 = 0 (5.2.2.1)
Donde
𝑒1 = −2𝑌𝐺𝐸1 + 2𝑌𝐴𝐸1 + 2𝐸1 𝑏 sin 𝛼
𝑒2 = −2𝑋𝐺𝐸1 + 2𝑋𝐴𝐸1 + 2𝐸1 𝑏 cos 𝛼
𝑒3 = 𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 + 2𝑋𝐴𝑏 cos 𝛼 + 𝐸1
2 + 𝑋𝐴2 − 𝐿1
2 − 𝑌𝐺2 − 2𝑌𝐺 𝑌𝐴 −
2𝑌𝐺𝑏 sin 𝛼 + 2𝑌𝐴𝑏 sin 𝛼 + 𝑌𝐴2
De las identidades trigonométricas. [3] [Tsai 1999]
sin 𝜃𝑖 =2𝑡𝑖
1 + 𝑡𝑖2 cos 𝜃𝑖 =
1 − 𝑡𝑖2
1 + 𝑡𝑖2 𝑡𝑖 = tan
𝜃𝑖
2
Sustituyendo en la ecuación (2.9)
e1 [2ti
1+ti2] + e2 [
1−ti2
1+ti2] + e3 = 0 (5.2.2.2)
Se obtiene
(𝑒3 − 𝑒2)𝑡𝑖2 + 2𝑒1𝑡𝑖 + (𝑒3 + 𝑒2) (5.2.2.3)
Luego
𝜃2 =−𝑒1 ± √𝑒1
2 + 𝑒22 − 𝑒3
2
𝑒3 − 𝑒2 (5.2.2.4)
Luego para 𝜃4 de la ecuación (5.2.1.8)se tiene
𝑒4 sin 𝜃4 + 𝑒5 cos 𝜃4 + 𝑒6 = 0 (5.2.2.5)
Teniendo como
𝑒4 = −2𝑌𝐺𝐸2 + 2𝑌𝐴𝐸2 + 2𝐸2 𝑏 sin 𝛼
𝑒5 = −2𝑋𝐺𝐸2 + 2𝑋𝐴𝐸2 + 2𝐸2 𝑏 cos 𝛼
55
𝑒6 = 𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 + 2𝑋𝐴𝑏 cos 𝛼 + 𝐸2
2 + 𝑋𝐴2 − 𝐿2
2 − 𝑌𝐺2 − 2𝑌𝐺 𝑌𝐴 −
2𝑌𝐺𝑏 sin 𝛼 + 2𝑌𝐴𝑏 sin 𝛼 + 𝑌𝐴2
Resolviendo para 𝜃4:
𝜃2 =−𝑒4 ± √𝑒4
2 + 𝑒52 − 𝑒6
2
𝑒6 − 𝑒5 (5.2.2.6)
5.3. Control de posicionamiento y programación
Luego de haber desarrollado la máquina virtual (Configuracion_0) se tenía considerado
retomar toda esta información aplicada e implementarla para esta configuración, lo cual no
se pudo hacer debido a que la herramienta Machine Tool Builder que define la cinemática
del dispositivo solo está configurada para matrices de rotación basadas en robótica serial,
lo cual sucede también en el Machine Configurator, ya que este solo se utiliza cundo las
cinemáticas de máquinas son muy complejas (máquinas de más de 4 ejes). Lo que implica
que no es posible configurar su cinemática de máquina, debido a que está basada en
robótica paralela y sus matrices de rotación vienen dadas por cadenas cinemáticas
cerradas.
Entonces se decidió ir por el lado de Co-simulación que es un sistema donde el dispositivo
ya no depende únicamente de las ordenes que se le puedan dar en NX SIEMENS, ya se
trata de un enlace entre dos programas donde NX SIEMENS tiene definidos sus
componentes físicos así como sus juntas y tipos de movimientos y el dispositivo es
controlado por medio de un enlace con MATLAB donde está definida la cinemática
matemáticamente, aquí se ordena una trayectoria y este por medio de un enlace (Simulink)
con NX SIEMENS ejecuta el movimiento del dispositivo.
5.4. Creación de enlaces y juntas
El software maneja diferentes módulos de simulación dependiendo de las necesidades y
propiedades de lo que se desee simular. Estos módulos son:
1. Advanced Simulation: Proporciona las herramientas completas para el modelado de
elementos finitos y la visualización de resultados para satisfacer las necesidades de
los analistas experimentados.
2. Motion Simulation: Proporciona las herramientas para simular y evaluar el
movimiento complejo de desplazamiento de los sistemas mecánicos.
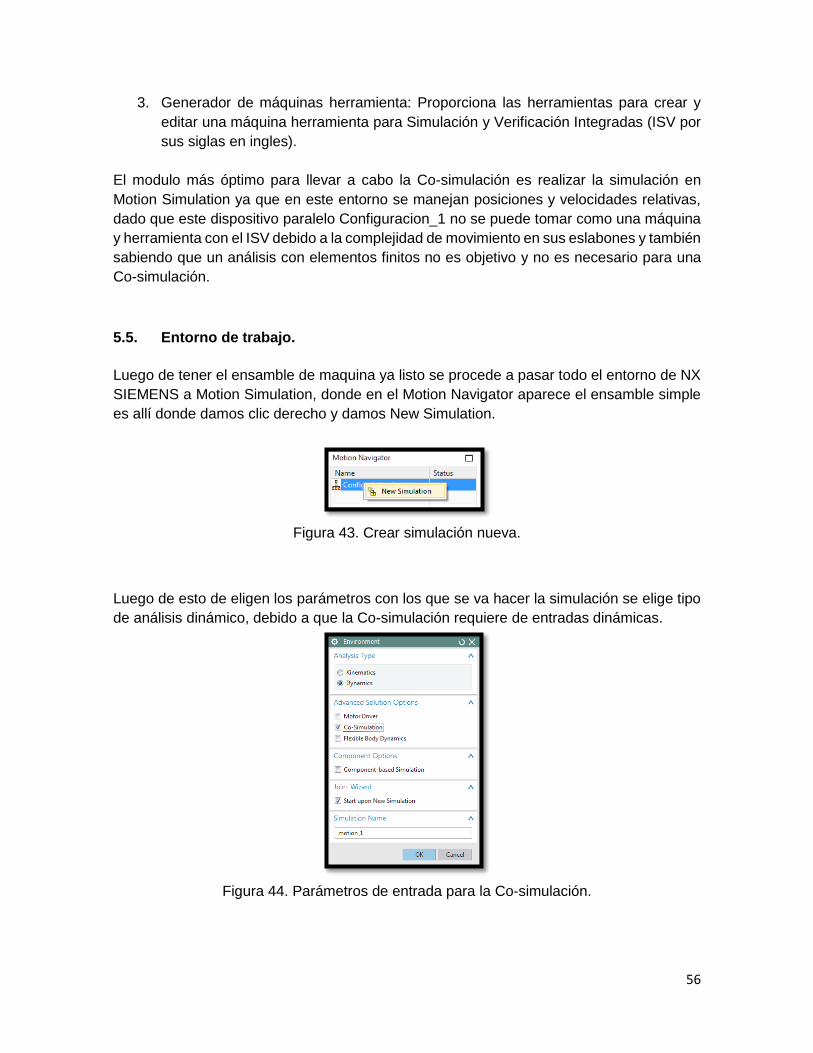
56
3. Generador de máquinas herramienta: Proporciona las herramientas para crear y
editar una máquina herramienta para Simulación y Verificación Integradas (ISV por
sus siglas en ingles).
El modulo más óptimo para llevar a cabo la Co-simulación es realizar la simulación en
Motion Simulation ya que en este entorno se manejan posiciones y velocidades relativas,
dado que este dispositivo paralelo Configuracion_1 no se puede tomar como una máquina
y herramienta con el ISV debido a la complejidad de movimiento en sus eslabones y también
sabiendo que un análisis con elementos finitos no es objetivo y no es necesario para una
Co-simulación.
5.5. Entorno de trabajo.
Luego de tener el ensamble de maquina ya listo se procede a pasar todo el entorno de NX
SIEMENS a Motion Simulation, donde en el Motion Navigator aparece el ensamble simple
es allí donde damos clic derecho y damos New Simulation.
Figura 43. Crear simulación nueva.
Luego de esto de eligen los parámetros con los que se va hacer la simulación se elige tipo
de análisis dinámico, debido a que la Co-simulación requiere de entradas dinámicas.
Figura 44. Parámetros de entrada para la Co-simulación.

57
Luego de dar ok en Environment se despliega un ventana Motion Join Wizard donde
software a partir de las restricciones del ensamble identifica los objetos que constituyen el
dispositivo y define automáticamente las juntas y los eslabones, entonces la mayoría de las
veces el software no lo hace correctamente y en la animación los objetos tienden a tener
tipos de uniones erradas, entonces damos cancelar e iniciamos a hacerlo paso a paso para
evitar posibles errores.
5.6. Selección de Links en el dispositivo.
La definición de enlaces representa los cuerpos rígidos que hay en el mecanismo
Figura 45. Icono de Enlace
Figura 46. Cuerpos rígidos definidos del dispositivo
5.7. Selección de Joints.
La simulación de movimiento se debe definir el cuerpo que se va a simular y los tipos de
movimiento que estos van a tener donde cada uno de ellos tiene grados específicos de
libertad (revoluta, cilíndrico, planar, etc.); Cuando se procede en la definición de enlace el
programa pide que se seleccione el modelo que se quiere crear donde se puede dar valores
de masa e inercia.
Figura 47. Junta

58
Al definir el tipo de junta dicho proceso depende del tipo de movimiento que se quiera tener
y de la geometría del cuerpo, es allí donde se selecciona el cuerpo, luego el origen del
movimiento, es decir sobre qué cuerpo y plano se va a realizar el movimiento y el vector
sobre el cual se va a llevar acabo el movimiento.
Figura 48. Parámetros de Joint deslizante.
Figura 49. Juntas definidas para el dispositivo.
Luego de esto es importante como requisito de una simulacion dinamica se debe tener en
cuenta la relacion entre el numero de grados de libertad de las juntas y el numero de
eslabones para evitar redundancias en el sistema siguiendo las tres siguientes reglas.
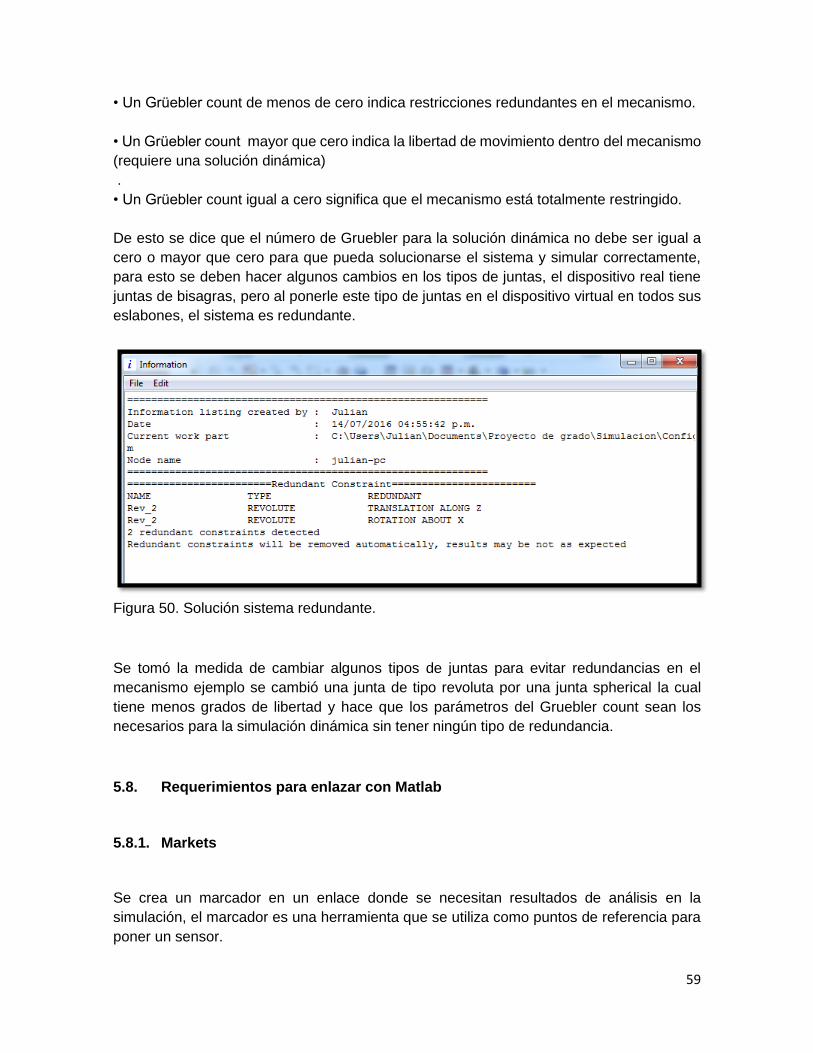
59
• Un Grüebler count de menos de cero indica restricciones redundantes en el mecanismo.
• Un Grüebler count mayor que cero indica la libertad de movimiento dentro del mecanismo
(requiere una solución dinámica)
.
• Un Grüebler count igual a cero significa que el mecanismo está totalmente restringido.
De esto se dice que el número de Gruebler para la solución dinámica no debe ser igual a
cero o mayor que cero para que pueda solucionarse el sistema y simular correctamente,
para esto se deben hacer algunos cambios en los tipos de juntas, el dispositivo real tiene
juntas de bisagras, pero al ponerle este tipo de juntas en el dispositivo virtual en todos sus
eslabones, el sistema es redundante.
Figura 50. Solución sistema redundante.
Se tomó la medida de cambiar algunos tipos de juntas para evitar redundancias en el
mecanismo ejemplo se cambió una junta de tipo revoluta por una junta spherical la cual
tiene menos grados de libertad y hace que los parámetros del Gruebler count sean los
necesarios para la simulación dinámica sin tener ningún tipo de redundancia.
5.8. Requerimientos para enlazar con Matlab
5.8.1. Markets
Se crea un marcador en un enlace donde se necesitan resultados de análisis en la
simulación, el marcador es una herramienta que se utiliza como puntos de referencia para
poner un sensor.

60
Figura 51. Marcadores de desplazamiento (azul y rojo).
5.8.2. Sensors
Se crea un objeto sensor para supervisar las posiciones de los objetos de movimiento
relacionados con las condiciones de simulación.
El sensor de define con parámetros como; componente en Y ya que el carro se va a
desplazar en este eje, Relative por que el sensor va hacer la medición de un marcador
respecto a otro el que está en movimiento respecto al que está fijo.
Figura 52 . Definicion de sensor

61
5.8.3. Matematica
Funtion manager
Se implementó las funciones matemáticas (cinemática de maquina) para definir los
controladores de movimiento en la simulación NX SIEMENS.
Donde las variables de la cinemática de maquina se insertan a la ecuación como sensores
de desplazamiento que nos otorgaran los datos de desplazamiento en los carros del
dispositivo así como el desplazamiento en los ejes coordenados (x, y) del efector final.
Figura 53. Insercion de cinematica entorno NX.
5.8.4. Imput
Figura 54. Planta de entrada
Se creó una planta de entrada para el sistema de control (Plant Imput), para accionar el
mecanismo como requisito para la Co-simulación con Matlab donde se puede asociar esta
entrada con diferentes tipos de opciones que están en la interfaz de NX SIEMENS como lo
son:
- Fuerza escalar
- Torque escalar
- Vector fuerza
- Vector torque
- Función matemática
- Tablas AFU
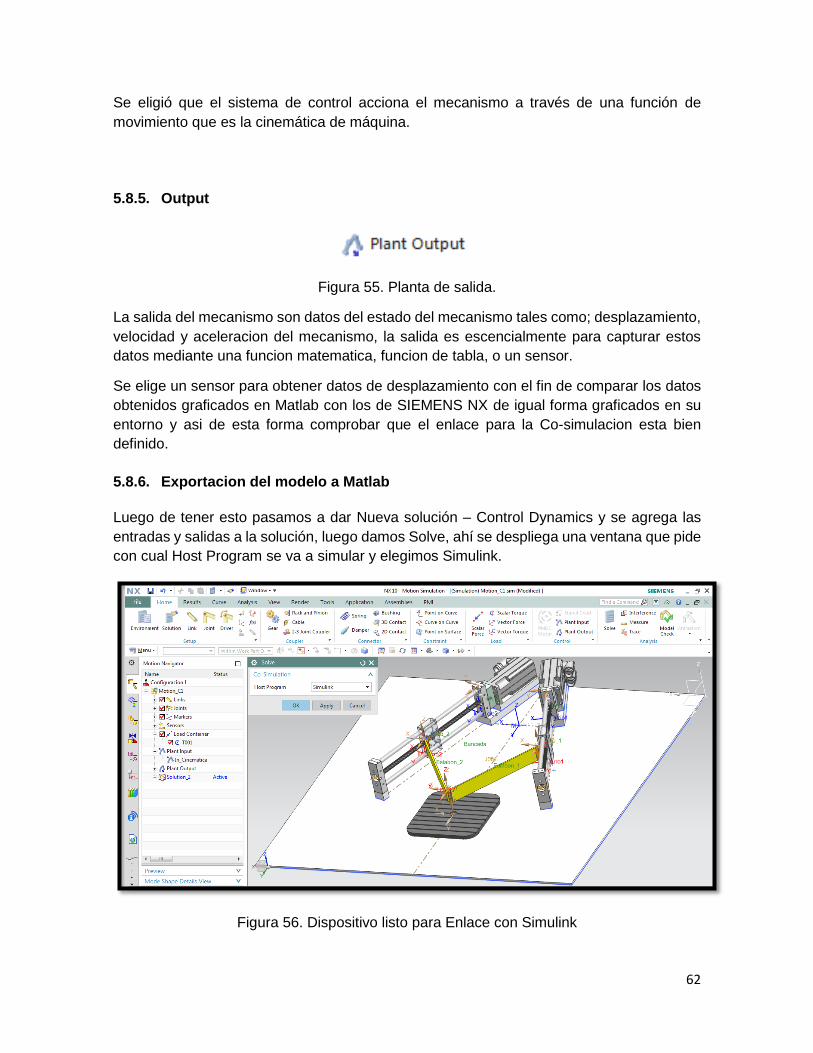
62
Se eligió que el sistema de control acciona el mecanismo a través de una función de
movimiento que es la cinemática de máquina.
5.8.5. Output
Figura 55. Planta de salida.
La salida del mecanismo son datos del estado del mecanismo tales como; desplazamiento,
velocidad y aceleracion del mecanismo, la salida es escencialmente para capturar estos
datos mediante una funcion matematica, funcion de tabla, o un sensor.
Se elige un sensor para obtener datos de desplazamiento con el fin de comparar los datos
obtenidos graficados en Matlab con los de SIEMENS NX de igual forma graficados en su
entorno y asi de esta forma comprobar que el enlace para la Co-simulacion esta bien
definido.
5.8.6. Exportacion del modelo a Matlab
Luego de tener esto pasamos a dar Nueva solución – Control Dynamics y se agrega las
entradas y salidas a la solución, luego damos Solve, ahí se despliega una ventana que pide
con cual Host Program se va a simular y elegimos Simulink.
Figura 56. Dispositivo listo para Enlace con Simulink
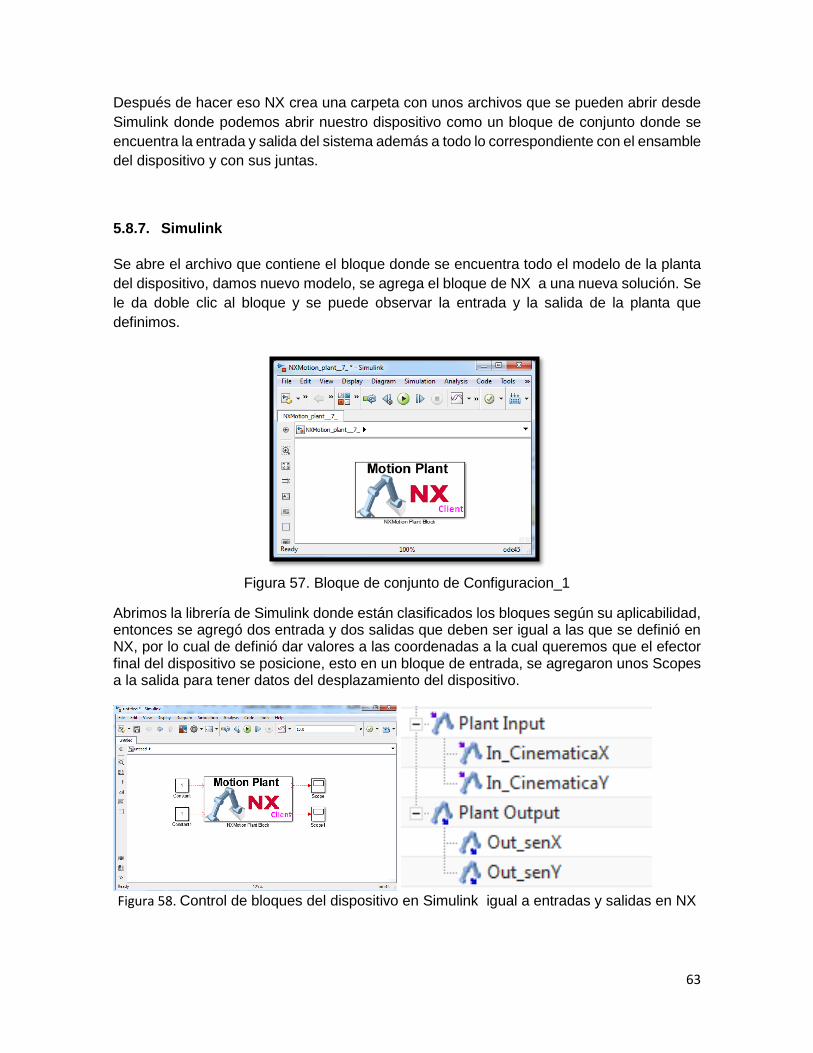
63
Después de hacer eso NX crea una carpeta con unos archivos que se pueden abrir desde
Simulink donde podemos abrir nuestro dispositivo como un bloque de conjunto donde se
encuentra la entrada y salida del sistema además a todo lo correspondiente con el ensamble
del dispositivo y con sus juntas.
5.8.7. Simulink
Se abre el archivo que contiene el bloque donde se encuentra todo el modelo de la planta
del dispositivo, damos nuevo modelo, se agrega el bloque de NX a una nueva solución. Se
le da doble clic al bloque y se puede observar la entrada y la salida de la planta que
definimos.
Figura 57. Bloque de conjunto de Configuracion_1
Abrimos la librería de Simulink donde están clasificados los bloques según su aplicabilidad, entonces se agregó dos entrada y dos salidas que deben ser igual a las que se definió en NX, por lo cual de definió dar valores a las coordenadas a la cual queremos que el efector final del dispositivo se posicione, esto en un bloque de entrada, se agregaron unos Scopes a la salida para tener datos del desplazamiento del dispositivo.
Figura 58. Control de bloques del dispositivo en Simulink igual a entradas y salidas en NX
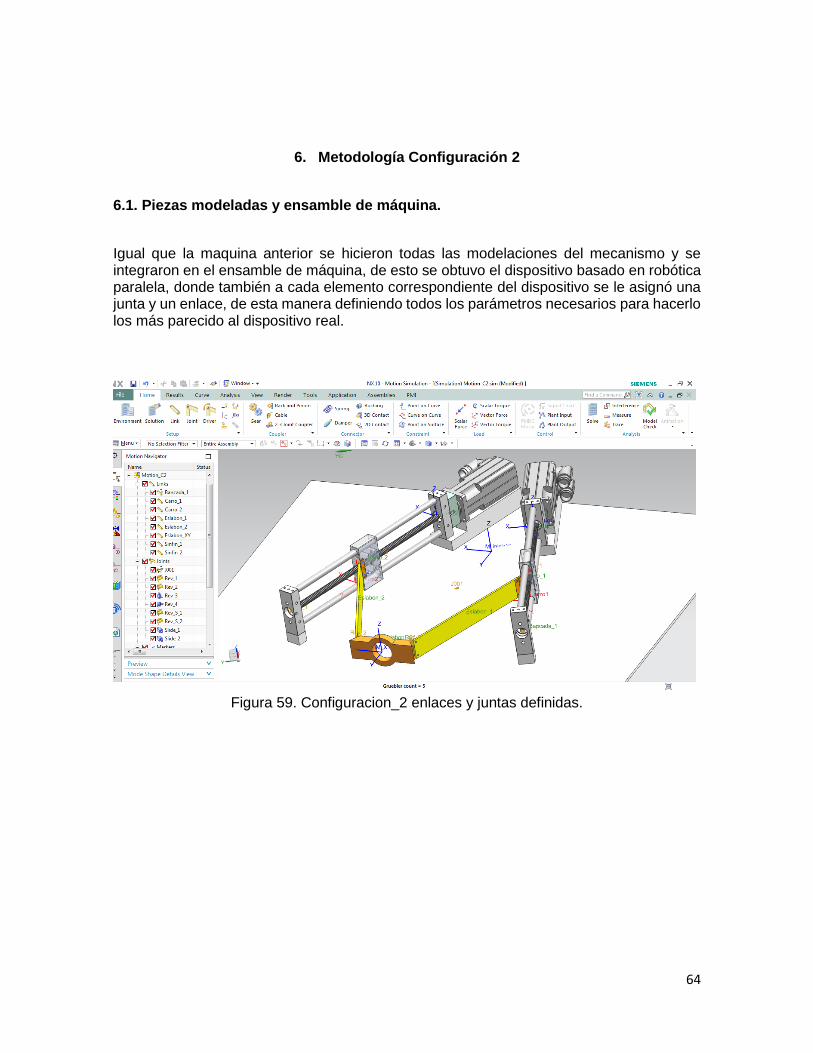
64
6. Metodología Configuración 2
6.1. Piezas modeladas y ensamble de máquina.
Igual que la maquina anterior se hicieron todas las modelaciones del mecanismo y se integraron en el ensamble de máquina, de esto se obtuvo el dispositivo basado en robótica paralela, donde también a cada elemento correspondiente del dispositivo se le asignó una junta y un enlace, de esta manera definiendo todos los parámetros necesarios para hacerlo los más parecido al dispositivo real.
Figura 59. Configuracion_2 enlaces y juntas definidas.

65
6.2. Diseño Matemático
6.2.1. Modelamiento matemático cinemática directa
De igual modo es resuelta la cinemática para la configuración 2, planteando un sistema
geométrico similar
Figura 60. Esquema primera cadena cinemática ‘configuración dos’.
𝐿1 = 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑠𝑜𝑏𝑟𝑒 𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛 1
𝜃1 = 𝐴𝑛𝑔𝑢𝑙𝑜 𝑓𝑜𝑟𝑚𝑎𝑑𝑜 𝑒𝑛𝑡𝑟𝑒 𝑒𝑙 𝑒𝑗𝑒 𝑦 𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛
𝐸1 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑒𝑠𝑙𝑎𝑏𝑜𝑛
𝛼 = Á𝑛𝑔𝑢𝑙𝑜 𝑓𝑜𝑟𝑚𝑎𝑑𝑜 𝑝𝑜𝑟 𝑒𝑙 𝑐𝑎𝑟𝑟𝑜 𝑑𝑒 𝑑𝑒𝑠𝑙𝑖𝑧𝑎𝑚𝑖𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑠𝑖𝑛𝑓𝑖𝑛 1
𝜑 = Á𝑛𝑔𝑢𝑙𝑜 𝑓𝑜𝑟𝑚𝑎𝑑𝑜 𝑝𝑜𝑟 𝑙𝑎 𝑝𝑙𝑎𝑓𝑜𝑟𝑚𝑎 𝑜 𝑝𝑜𝑟𝑡𝑎 − ℎ𝑒𝑟𝑟𝑎𝑚𝑖𝑒𝑛𝑡𝑎
𝑡 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑚𝑒𝑑𝑖𝑎 𝑝𝑙𝑎𝑡𝑎𝑓𝑜𝑟𝑚𝑎 𝑜 𝑝𝑜𝑟𝑎 − ℎ𝑒𝑟𝑟𝑎𝑚𝑖𝑒𝑛𝑡𝑎
El lazo vectorial de ecuaciones puede ser escrito como:
𝐴𝐺̅̅ ̅̅ = 𝐴𝐵̅̅ ̅̅ + 𝐵𝐼̅̅ ̅ + 𝐼𝐺̅̅ ̅ (6.2.1.1)
Expresando el lazo vectorial de ecuaciones respecto al marco de referencia de
coordenadas dadas.
𝑋𝐺 = 𝑋𝐴 + 𝐸1 cos 𝜃1 + 𝑏 cos 𝛼 + 𝐸2 cos 𝜃2 (6.2.1.2)
𝑌𝐺 = 𝑌𝐴 + 𝐸1 sin 𝜃1 + 𝑏 sin 𝛼 + 𝐸2 sin 𝜃2 (6.2.1.3)
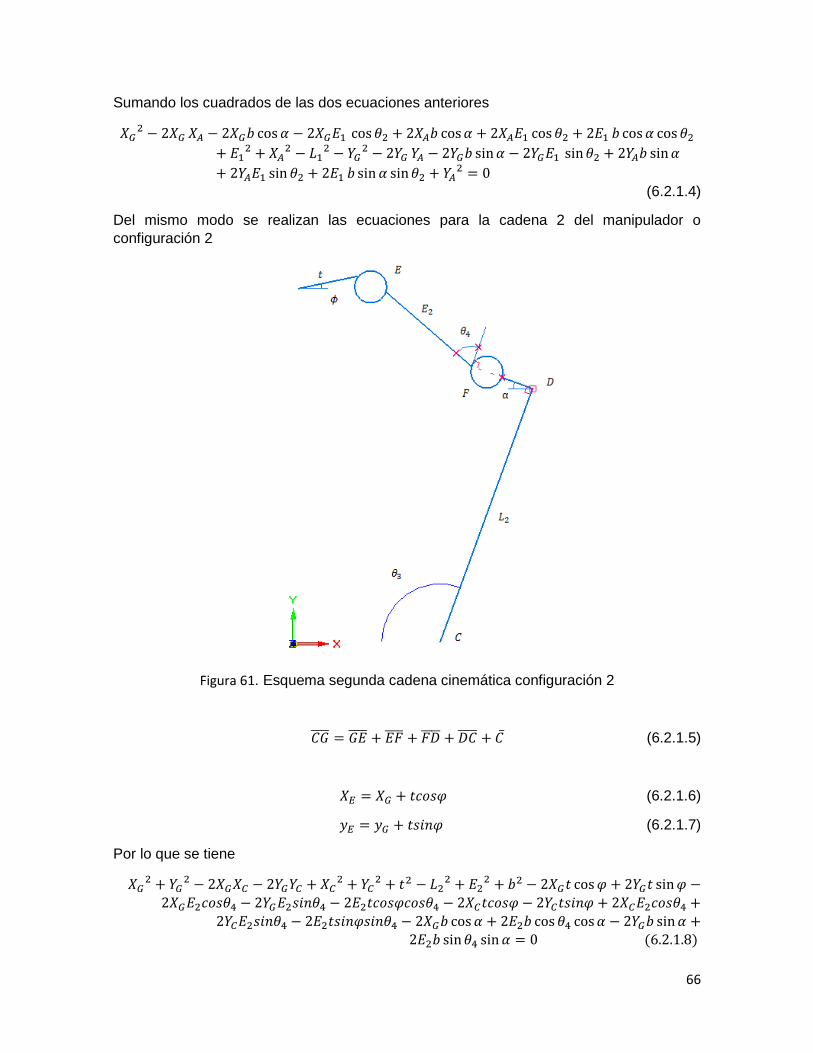
66
Sumando los cuadrados de las dos ecuaciones anteriores
𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 − 2𝑋𝐺𝐸1 cos 𝜃2 + 2𝑋𝐴𝑏 cos 𝛼 + 2𝑋𝐴𝐸1 cos 𝜃2 + 2𝐸1 𝑏 cos 𝛼 cos 𝜃2
+ 𝐸12 + 𝑋𝐴
2 − 𝐿12 − 𝑌𝐺
2 − 2𝑌𝐺 𝑌𝐴 − 2𝑌𝐺𝑏 sin 𝛼 − 2𝑌𝐺𝐸1 sin 𝜃2 + 2𝑌𝐴𝑏 sin 𝛼
+ 2𝑌𝐴𝐸1 sin 𝜃2 + 2𝐸1 𝑏 sin 𝛼 sin 𝜃2 + 𝑌𝐴2 = 0
(6.2.1.4)
Del mismo modo se realizan las ecuaciones para la cadena 2 del manipulador o
configuración 2
Figura 61. Esquema segunda cadena cinemática configuración 2
𝐶𝐺̅̅ ̅̅ = 𝐺𝐸̅̅ ̅̅ + 𝐸𝐹̅̅ ̅̅ + 𝐹𝐷̅̅ ̅̅ + 𝐷𝐶̅̅ ̅̅ + 𝐶̅ (6.2.1.5)
𝑋𝐸 = 𝑋𝐺 + 𝑡𝑐𝑜𝑠𝜑 (6.2.1.6)
𝑦𝐸 = 𝑦𝐺 + 𝑡𝑠𝑖𝑛𝜑 (6.2.1.7)
Por lo que se tiene
𝑋𝐺2 + 𝑌𝐺
2 − 2𝑋𝐺𝑋𝐶 − 2𝑌𝐺𝑌𝐶 + 𝑋𝐶2 + 𝑌𝐶
2 + 𝑡2 − 𝐿22 + 𝐸2
2 + 𝑏2 − 2𝑋𝐺𝑡 cos 𝜑 + 2𝑌𝐺𝑡 sin 𝜑 −
2𝑋𝐺𝐸2𝑐𝑜𝑠𝜃4 − 2𝑌𝐺𝐸2𝑠𝑖𝑛𝜃4 − 2𝐸2𝑡𝑐𝑜𝑠𝜑𝑐𝑜𝑠𝜃4 − 2𝑋𝐶𝑡𝑐𝑜𝑠𝜑 − 2𝑌𝐶𝑡𝑠𝑖𝑛𝜑 + 2𝑋𝐶𝐸2𝑐𝑜𝑠𝜃4 +
2𝑌𝐶𝐸2𝑠𝑖𝑛𝜃4 − 2𝐸2𝑡𝑠𝑖𝑛𝜑𝑠𝑖𝑛𝜃4 − 2𝑋𝐺𝑏 cos 𝛼 + 2𝐸2𝑏 cos 𝜃4 cos 𝛼 − 2𝑌𝐺𝑏 sin 𝛼 +2𝐸2𝑏 sin 𝜃4 sin 𝛼 = 0 (6.2.1.8)

67
6.2.2. Modelamiento matemático cinemática inversa
Para la el cálculo de la cinemática inversa, 𝑋𝐺, 𝑌𝐺, están dados, y los ángulos 𝜃2, 𝜃4,
deberán ser hallados. Para la primera cadena se organiza la ecuación (6.2.1.4) de la
siguiente forma:
𝑒7 sin 𝜃2 + 𝑒8 cos 𝜃2 + 𝑒9 = 0 (6.2.2.1)
Donde
𝑒7 = −2𝑌𝐺𝐸1 + 2𝑌𝐴𝐸1 + 2𝐸1 𝑏 sin 𝛼
𝑒8 = −2𝑋𝐺𝐸1 + 2𝑋𝐴𝐸1 + 2𝐸1 𝑏 cos 𝛼
𝑒9 = 𝑋𝐺2 − 2𝑋𝐺 𝑋𝐴 − 2𝑋𝐺𝑏 cos 𝛼 + 2𝑋𝐴𝑏 cos 𝛼 + 𝐸1
2 + 𝑋𝐴2 − 𝐿1
2 − 𝑌𝐺2 − 2𝑌𝐺 𝑌𝐴 −
2𝑌𝐺𝑏 sin 𝛼 + 2𝑌𝐴𝑏 sin 𝛼 + 𝑌𝐴2
De las identidades trigonométricas semiangulares. [3] [Tsai 1999]
sin 𝜃𝑖 =2𝑡𝑖
1 + 𝑡𝑖2 cos 𝜃𝑖 =
1 − 𝑡𝑖2
1 + 𝑡𝑖2 𝑡𝑖 = tan
𝜃𝑖
2
Sustituyendo en la ecuación (3.9)
e7 [2ti
1+ti2] + e8 [
1−ti2
1+ti2] + e9 = 0 (6.2.2.2)
Se obtiene
(𝑒9 − 𝑒8)𝑡𝑖2 + 2𝑒7𝑡𝑖 + (𝑒9 + 𝑒8) (6.2.2.3)
Luego
𝜃2 =−𝑒7 ± √𝑒7
2 + 𝑒82 − 𝑒9
2
𝑒9 − 𝑒8 (6.2.2.4)
Luego para 𝜃4 de la ecuación (6.2.1.8) se tiene:
𝑒10 sin 𝜃4 + 𝑒11 cos 𝜃4 + 𝑒12 = 0 (6.2.2.5)
Teniendo como
𝑒10 = −2𝑌𝐺𝐸2 + 2𝐸2 𝑏 sin 𝛼 − 2𝐸2𝑡𝑠𝑖𝑛𝜑 + 2𝑌𝐶𝐸2
𝑒11 = −2𝑋𝐺𝐸2 − 2𝐸2𝑡𝑐𝑜𝑠𝜑 + 2𝑋𝐶𝐸2 + 2𝐸2𝑏 cos 𝛼
𝑒12 = 𝑋𝐺2 + 𝑌𝐺
2 − 2𝑋𝐺𝑋𝐶 − 2𝑌𝐺𝑌𝐶 + 𝑋𝐶2 + 𝑌𝐶
2 + 𝑡2 − 𝐿22 + 𝐸2
2 + 𝑏2 − 2𝑋𝐺𝑡 cos 𝜑 +
2𝑌𝐺𝑡 sin 𝜑 − 2𝑋𝐶𝑡𝑐𝑜𝑠𝜑 − 2𝑌𝐶𝑡𝑠𝑖𝑛𝜑 − 2𝑋𝐺𝑏 cos 𝛼 − 2𝑌𝐺𝑏 sin 𝛼

68
Resolviendo para 𝜃4:
𝜃4 =−𝑒11 ± √𝑒11
2 + 𝑒102 − 𝑒12
2
𝑒12 − 𝑒10 (6.2.2.6)
6.3. Programación y control de posicionamiento
Luego de satisfacer los parámetros necesarios para hacer una simulación dinámica como definir; número de Gruebler, y ver que en la animación no presenta ninguna redundancia, se definieron los requisitos para poder hacer una Co-simulación donde se tienen en cuenta; los markets, sensores, Planta de entrada, Planta de salida, Cinemática de máquina asociada con la entrada del sistema.
Figura 62. Configuracion_2 con requisitos para la Co-simulación.
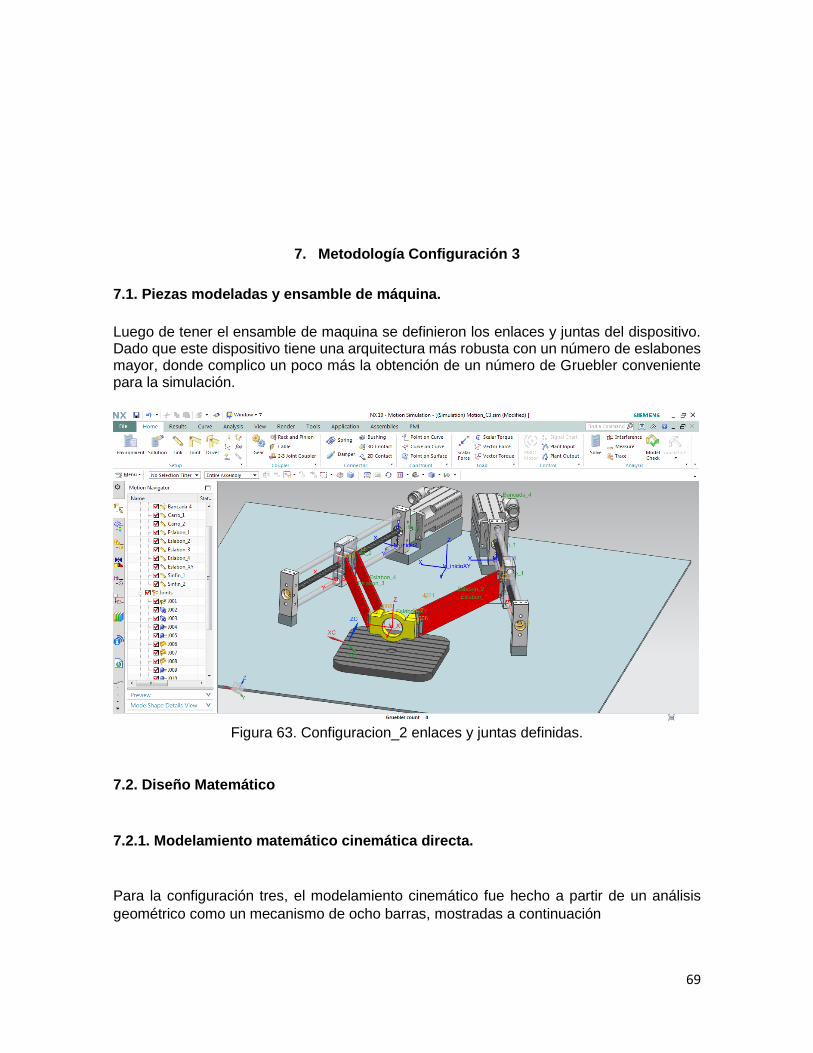
69
7. Metodología Configuración 3
7.1. Piezas modeladas y ensamble de máquina.
Luego de tener el ensamble de maquina se definieron los enlaces y juntas del dispositivo. Dado que este dispositivo tiene una arquitectura más robusta con un número de eslabones mayor, donde complico un poco más la obtención de un número de Gruebler conveniente para la simulación.
Figura 63. Configuracion_2 enlaces y juntas definidas.
7.2. Diseño Matemático
7.2.1. Modelamiento matemático cinemática directa.
Para la configuración tres, el modelamiento cinemático fue hecho a partir de un análisis
geométrico como un mecanismo de ocho barras, mostradas a continuación

70
Se reacomodan las ecuaciones para aislar una de las incógnitas
𝑏 cos 𝜃3 = −𝑎 cos 𝜃2 + 𝑐 cos 𝜃4 + 𝑑 cos(λ 𝜃2 + 𝜙) + 𝑡 (7.2.1.1)
𝑏 sin 𝜃3 = −𝑎 sin 𝜃2 + 𝑐 sin 𝜃4 + 𝑑 sin(λ 𝜃2 + 𝜙) (7.2.1.2)
Se elevan al cuadrado ambas ecuaciones y luego se suman para eliminar una de las
incógnitas:
𝑏2(𝑐𝑜𝑠2𝜃3 + 𝑠𝑖𝑛2𝜃3) = −2𝑎2(𝑐𝑜𝑠2𝜃2 + 𝑠𝑖𝑛2𝜃2) + 2𝑐2(𝑐𝑜𝑠2𝜃4 + 𝑠𝑖𝑛2𝜃4) + 2𝑑2(𝑐𝑜𝑠2(λ 𝜃2 +
𝜙) + 𝑠𝑖𝑛2 (λ 𝜃2 + 𝜙)) + 𝑡 (7.2.1.3)
7.2.2. Modelamiento matemático cinemática inversa.
𝑒13 sin 𝜃2 + 𝑒14 cos 𝜃2 + 𝑒15 = 0 (7.2.2.1)
Luego se sustituye las identidades semiangulares tangentes:
sin 𝜃𝑖 =2𝑡𝑖
1 + 𝑡𝑖2 cos 𝜃𝑖 =
1 − 𝑡𝑖2
1 + 𝑡𝑖2 𝑡𝑖 = tan
𝜃𝑖
2
Reemplazando en la ecuación (7.2.1.1)queda de la siguiente forma:
e13 [2ti
1 + ti2] + e14 [
1 − ti2
1 + ti2] + e15 = 0
donde:
𝑒13 = 2𝑐[𝑑 cos(cos 𝜃5) − 𝑎 cos 𝜃2 + 𝑡]
𝑒14 = 2𝑐[𝑑 sin(cos 𝜃5) − 𝑎 sin 𝜃2]
𝑒15 = 𝑎2 − 𝑏2 + 𝑐2 + 𝑑2 + 𝑡2 − 2𝑎𝑡 cos 𝜃2 − 2𝑑(𝑎 cos 𝜃2 − 𝑡)(cos 𝜃5) − 2𝑎𝑑 sin 𝜃2 sin 𝜃5
Se obtiene:
(𝑒15 − 𝑒14)𝑡𝑖2 + 2𝑒13𝑡𝑖 + (𝑒15 + 𝑒14)
Resolviendo para 𝜃2 queda:
𝜃2 =−𝑒14 ± √𝑒14
2 + 𝑒132 − 𝑒15
2
𝑒15 − 𝑒13 (7.2.2.2)
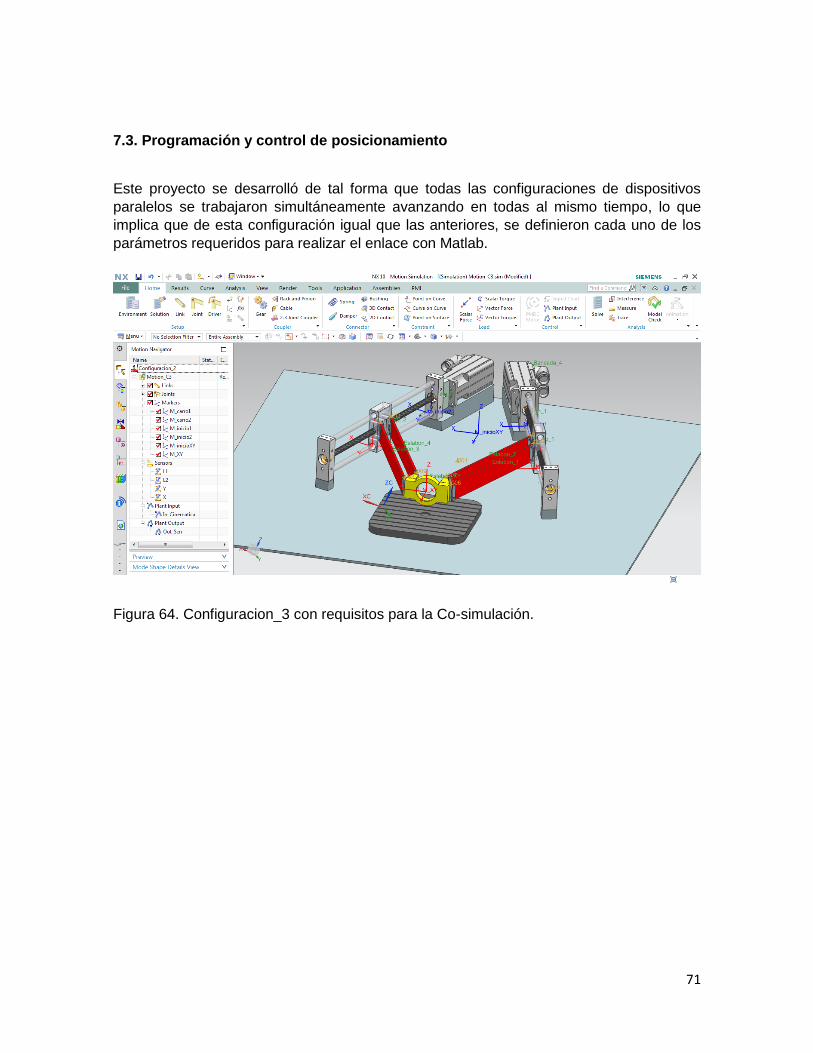
71
7.3. Programación y control de posicionamiento
Este proyecto se desarrolló de tal forma que todas las configuraciones de dispositivos
paralelos se trabajaron simultáneamente avanzando en todas al mismo tiempo, lo que
implica que de esta configuración igual que las anteriores, se definieron cada uno de los
parámetros requeridos para realizar el enlace con Matlab.
Figura 64. Configuracion_3 con requisitos para la Co-simulación.

72
8. RESULTADOS
8.1. Representación de la cinemática de la máquina herramienta
En el implementó de la cinemática del dispositivo y al haber establecido restricciones
de movimiento definiendo los límites en cada uno de sus ejes, se tiene una simulación
exacta de cinemática de máquina, con la certeza que esta máquina virtual no se sale
de su espacio de trabajo. En caso de que la pieza a mecanizar sea más grande y se
salga de su espacio de trabajo sale un aviso que nos advierte que el dispositivo no está
en condiciones de realizar dicho proceso de mecanizado.
Figura 65. Comprobación de cinemática del dispositivo.

73
8.2. Mecanizado
NX SIEMENS tiene una opción donde podemos decidir que se muestre la remoción de
material en 3 dimensiones, donde se puede ver que la pieza se mecaniza siguiendo las
trayectorias establecidas en la pieza de trabajo.
Figura 66. Mecanización con visualización de remoción de material.
8.3. Detección de colisiones
En la simulación de mecanizado NX cuenta con la herramienta de detección de
colisiones donde detecta colisiones ya sea de la maquina como tal o de la herramienta
con la geometría de la pieza, esto se puede ver cuando en medio de la simulación la
herramienta y la pieza toman un color rojo advirtiéndonos qué; la geometría de la
maquina o pieza de trabajo no es apta para desarrollar este proceso de mecanización
o que la geometría de la herramienta no es apta para la remoción de material.
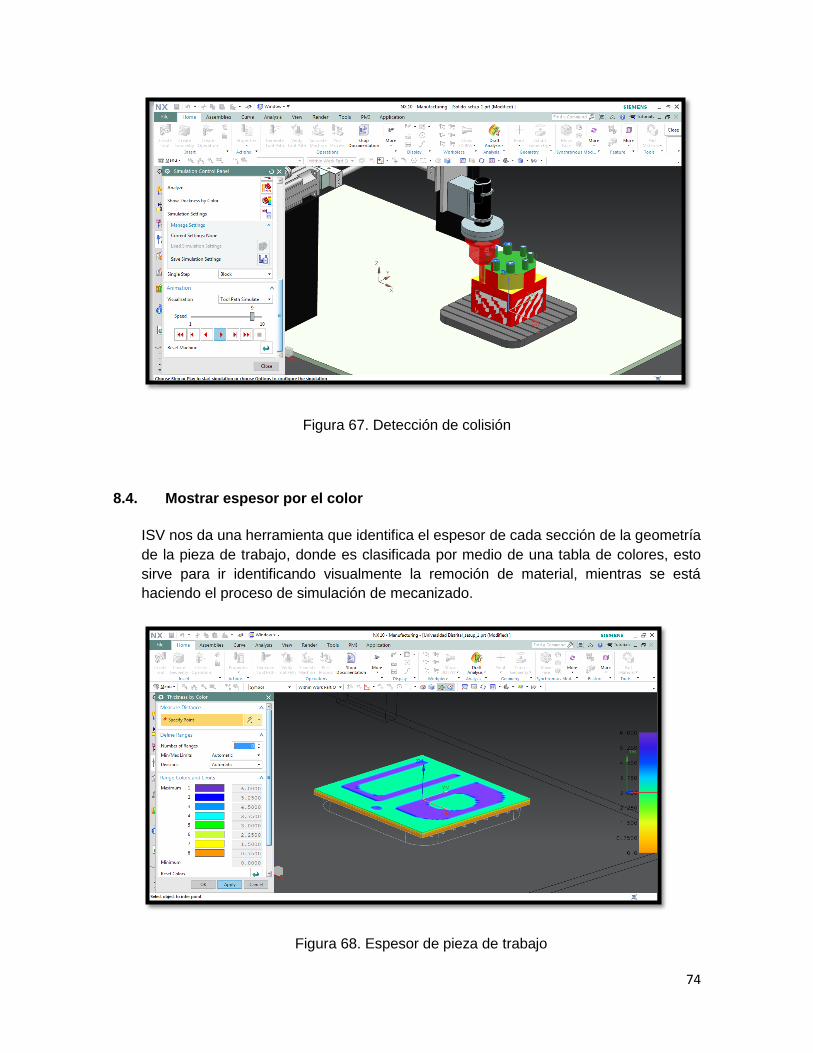
74
Figura 67. Detección de colisión
8.4. Mostrar espesor por el color
ISV nos da una herramienta que identifica el espesor de cada sección de la geometría
de la pieza de trabajo, donde es clasificada por medio de una tabla de colores, esto
sirve para ir identificando visualmente la remoción de material, mientras se está
haciendo el proceso de simulación de mecanizado.
Figura 68. Espesor de pieza de trabajo

75
8.5. Programa con códigos NC
ISV nos ofrece datos en el mismo instante que se está simulando como lo son datos de;
coordenadas en el que se encuentra el usillo, Códigos CNC, detalles de la simulación,
donde muestra las operaciones y si es el caso colisiones que se presenten en el proceso
de mecanizado.
Figura 69. Panel de control de la simulación.
NX dentro de su interfaz podemos obtener todo el código CNC en norma ISO listo para
poder insertarlo en cualquier tipo de maquina CNC.
Figura 70. Programa NC en ISO (lenguaje de programación G)
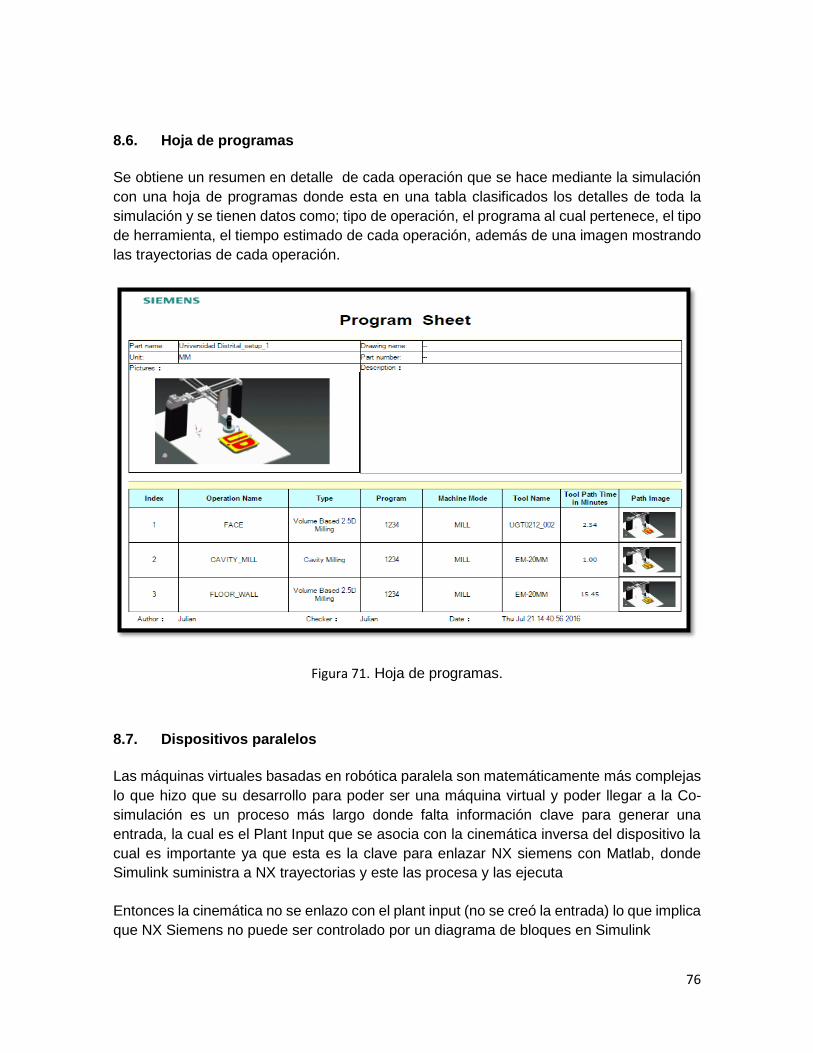
76
8.6. Hoja de programas
Se obtiene un resumen en detalle de cada operación que se hace mediante la simulación
con una hoja de programas donde esta en una tabla clasificados los detalles de toda la
simulación y se tienen datos como; tipo de operación, el programa al cual pertenece, el tipo
de herramienta, el tiempo estimado de cada operación, además de una imagen mostrando
las trayectorias de cada operación.
Figura 71. Hoja de programas.
8.7. Dispositivos paralelos
Las máquinas virtuales basadas en robótica paralela son matemáticamente más complejas
lo que hizo que su desarrollo para poder ser una máquina virtual y poder llegar a la Co-
simulación es un proceso más largo donde falta información clave para generar una
entrada, la cual es el Plant Input que se asocia con la cinemática inversa del dispositivo la
cual es importante ya que esta es la clave para enlazar NX siemens con Matlab, donde
Simulink suministra a NX trayectorias y este las procesa y las ejecuta
Entonces la cinemática no se enlazo con el plant input (no se creó la entrada) lo que implica
que NX Siemens no puede ser controlado por un diagrama de bloques en Simulink

77
Además otro aspecto que hay que tener en cuenta es que también falta, como hacer el
enlace de la cinemática desde Simulink con el bloque de control exportado de NX Siemens.
Estos tres dispositivos quedaron con los parámetros definidos en su totalidad para poder
ser retomada más adelante y seguir trabajando en ellas.
Se logró hacer la animación de todos los dispositivos paralelos, para determinar que sus
cuerpos y sus juntas están bien definidos y que el dispositivo virtual tiene un
comportamiento igual al real.
Por otra parte la información sobre Co-simulación es muy limitada, en la búsqueda de
información se encontró un solo proyecto que se desarrolló en la universidad Nacional de
Colombia con características similares a nuestro proyecto, pero solo se encontró un video
de este, donde se muestra el dispositivo siendo controlado desde Matlab obedeciendo a
unas trayectorias programadas, donde no se encontró el documento referente a este
proyecto en la base de datos de esta Universidad.
78
OBSERVACIONES Y RECOMENDACIONES
Para cumplir completamente los objetivos de este proyecto por parte de dispositivos
basados en robótica paralela se podría hacer de la siguiente forma:
Esperar que NX SIEMENS haga una actualizacion del ISV donde incluyeran dispositivos de
robotica paralela y que en el Machine Tool Builder se puedan definir cinematicas de
maquina con matrices de rotacion con cadenas cinematicas cerradas.
Para el desarrollo es necesario tener una especializacion en matematica computacional y
conocer bastante en entornos como Simulink.
Seguir con este proceso que se esta llevando a cabo hasta conseguir enlazar la cinematica
de maquina con el Input y se pueda exportar un bloque de conjunto a Matlab ademas de
tener una buena base en conocimiento sobre el software Matlab para fijar las trayectorias
a partir de su entorno Simulink.
Hacer contacto con los ingenieros encargados de realizar un tipo de proyecto similar a este,
para la obtención de la información que hace falta y así solucionar el problema que no dejo
desarrollar el proyecto en su totalidad, u otra opción sería hacer contacto directo con la
empresa SIEMENS en Alemania para poder mostrarles el problema que nos detuvo, y que
ellos directamente nos brinden la información.
79
CONCLUSIONES
Con el estudio realizado a las diferentes configuraciones, desde la recolección de información, modelado, ensamble y simulación en la plataforma NX SIEMENS se pudo comprender más a fondo la complejidad y funcionalidad del mismo, y la amplia capacidad del software en el ámbito de la simulación por lo tanto se concluye lo siguiente:
Como todos los dispositivos de arquitectura libre, es necesario ser correctamente estudiada y comprendida su cinemática directa e inversa para que pueda aumentar la exactitud en una simulación de movimiento, debido a que todo lo relacionado con este tema es muy extenso se necesita dedicarle mucho tiempo, además de tener un buen nivel académico.
Como NX SIEMENS es un software robusto, este permitió desarrollar dado sus excelentes capacidades el modelamiento y ensamble de cada uno de los componentes que conforman cada una de las configuraciones.
Con la amplia variedad de aplicaciones y herramientas que posee NX SIEMENS se logró construir una máquina virtual, permitiendo desarrollar una arquitectura de maquina muy similar al dispositivo real, ya que este software permite definir parámetros asociados a la geometría del dispositivo físico.
Con el desarrollo de esta máquina virtual, NX muestra la gran capacidad que tiene para simular un proceso de mecanizado, suministrando una amplia variedad de herramientas que facilitan procesos que pueden llegar a ser muy extensos en comparación con un proceso real. Donde NX puede evadir una serie de pasos que implican tiempo en la programación manual.
Las máquinas virtuales basadas en robótica paralela son matemáticamente más complejas, lo cual requiere de más tiempo e información.
Se puede concluir que fue un proyecto un poco ambicioso, ya que para la elaboración de este, no solo corresponde al proyecto curricular de tecnología en mecánica sino que involucra otras áreas como programación y herramientas informáticas para matemáticas y física
El proyecto queda abierto para retomar y poder llegar a dar una solución a las secciones en las cuales no se tienen las bases para la construcción y solución al problema planteado.
A través de este proyecto se puede incentivar a generar espacios académicos enfocados en el área de la robótica y la automatización en la Universidad Distrital. Ya que este tipo de dispositivos están en gran crecimiento en la industria.
80
BIBLIOGRAFÍA
1. ROBERT, L, NORTON, Diseño De Maquinaria. Mc Graw Hill, México (2009)4ta
edición.
2. REYES FERNANDO, MATLAB Aplicado a Robótica y Mecatrónica. Alfaomega Grupo Editor, México (2013).
3. LUNG-WEN TSAI. Analysis: The Mechanics of Serial and Parallel Manipulators., John Wiley & sons, inc., 1999
4. ATAURIMA, A, MIGUEL, Matlab & Simulink Para ingeniería Nivel 1, Mathworks, 2013.
5. Documentación NX [en línea] <http://localhost:8181/tdoc/nx/10/nx_help/#uid:id563431;> consultado el 8 de junio de 2016
6. A. NORIEGA González, A. GARCÍA Martínez, M. MUÑIZ Calvente. Resolución del problema cinemático inverso en un robot SCARA mediante grupos de Assur, XIX congreso nacional de ingeniería mecánica, Asociación Española de Ingeniería Mecánica < disponible en http://www.xixcnim.uji.es/CDActas/Documentos/ComunicacionesOrales/14-02.pdf> consultado el 29 de agosto de 2015
7. CARDONA, G, Manuel. Algoritmo para la solución de la cinemática directa de robots paralelos planares 3RRR destinados a aplicaciones en tiempo real. El Salvador. Universidad de Sonsonate. Facultad de ingeniería y C.C. Disponible en <http://www.kramirez.net/Robotica/Material/Presentaciones/cinematica_directa_robots.pdf> consultado el 29 de Agosto de 2015
8. BRIONES, Juan, A. Diseño análisis y construcción de un robot paralelo traslacional. Querétaro (2009). Trabajo de grado. Instituto politécnico nacional. Centro de investigación en ciencias aplicadas. Disponible en <http://itzamna.bnct.ipn.mx:8080/dspace/bitstream/123456789/4900/1/JABL.PDF>consultado el 02 de septiembre de 2015
9. VÁZQUEZ, H, Jesús y CUENCA, J, Francisco. Cinemática Inversa y Análisis Jacobiano del Robot Paralelo Hexa. México (2009). Universidad Nacional Autónoma de México. Departamento de Mecánica. Disponible en < http://somim.org.mx/articulos2010/memorias/memorias2009/pdfs/A4/A4_139.pdf > consultado el 02 de septiembre de 2015.
10. HUIPING, Shen , SHAOBIN Tao , LUZHONG Ma , JIAMING Deng , TINGLI Yang. A novel 3-Dof three-translation parallel mechanism and displacement analysis. Jiangsu Polytechnic University. Disponible en catalogo en línea de la universidad Distrital Francisco Jose de Caldas < https://www.udistrital.edu.co >
11. Vaca, Juan, PEÑA, Cristhian, y Vacca, Harold. Cinemática inversa de robot serial
utilizando algoritmo genético basado en MCDS. Bogotá (2015). Revista Tecnura.

81
Vol 19. N° 44. Disponible en <-http://www.scielo.org.co/scielo.php?pid=S0123-
921X2015000200003&script=sci_arttext&tlng=pt > CONSULTADO 10 de
septiembre de 2015
12. CISNEROS, Rafael. Modelo matemático de un robot paralelo de seis grados de libertad. México (2006). Universidad de las Américas, Puebla. Departamento de comunicación, electrónica. Disponible en < http://www.researchgate.net/publication/37613187_Modelo_Matemtico_de_un_Robot_Paralelo_de_Seis_Grados_de_Libertad> Consultado el 10 de septiembre 2015
13. NIÑO, Clemencia , QUINTERO, Héctor, MONROY, Mauricio , HERRERA Marlon.
Análisis de un manipulador paralelo plano de dos grados de libertad. Universidad
Tecnológica de Pereira. 3er Congreso Internacional de Ingeniería Mecatrónica.
Disponible en
http://revistas.unab.edu.co/index.php?journal=mecatronica&page=article&op=view
Article&path%5B%5D=1414 Consultado el 10 de septiembre a 2015.
14. MARTINEZ, Edison y PEÑA, César. Diseño óptimo de un robot paralelo con
configuración delta para aplicaciones educativas.Combia (2010). Universidad de
Pamplona. Disponible en <
http://www.educacioneningenieria.org/index.php/edi/article/viewFile/106/93 >
consultado el 19 de septiembre de 2015.
15. ZHANG, Chen , SHANG Liyan. Kinematics analysis and workspace investigation of a novel 2-DOF parallel. Nanjing University of aeronautics and Astronautics. Disponible en catalogo en línea de la universidad Distrital Francisco Jose de Caldas < https://www.udistrital.edu.co > consultado el 20 de septiembre de 2015.
16. S. Ali, A. Nazari*, AYYUB Hasani. Kinematics and Workspace Analysis of a Novel 3-DOF Spatial Parallel Robot . Islamic Azad University. Disponible en catalogo en línea de la universidad Distrital Francisco Jose de Caldas <
https://www.udistrital.edu.co > consultado el 20 de septiembre de 2015.