daeho tech - dhw.kr · se apaga al trabajar con película o papel sin impreso. ... el motor se para...
TRANSCRIPT
DID SERVO DRIVER
Instrucción de Operación
DAEHO TECH
TEL: 070-7150-4355
TEL: (02)971-0942
FAX: (02)971-0429 www.dhw.kr
E-mail: [email protected]
Favor de leer esta instrucción antes de uso.
Operación de FC-5000
Referencia : Método de ingresar el valor de rodillo Si oprime 2 segundos la tecla de interrupciónr y la de largo al mismo tiempo, se muestra el modo de parámetro.
Es decir, si al principio se muestran 0 a la izquierda y 6, el valor básico del tramo de marca a la derecha, oprimen varias
veces la tecla de dirección recta de Jog, y si aparece 11 a la izquierda, ingresan la razón de engranajes(número de dientes del rodillo/número de dientes del motor *10), y si aparece 12 a la izquierda oprimiéndola una vez más, oprimen
dos veces la tecla de interrupción después de asegurar el valor de la derecha(valor básico 3140). Si la longitud era 3140
en el mismo valor que número 12, trabajan unas piezas poniéndola en 3140, y después miden exactamente la longitud y la ingresan en 12 de parámetro en lugar de 3140. Si este número es grande, salen más pequeño que el tamaño ajustado
realmente y si es pequeño salen más grande.
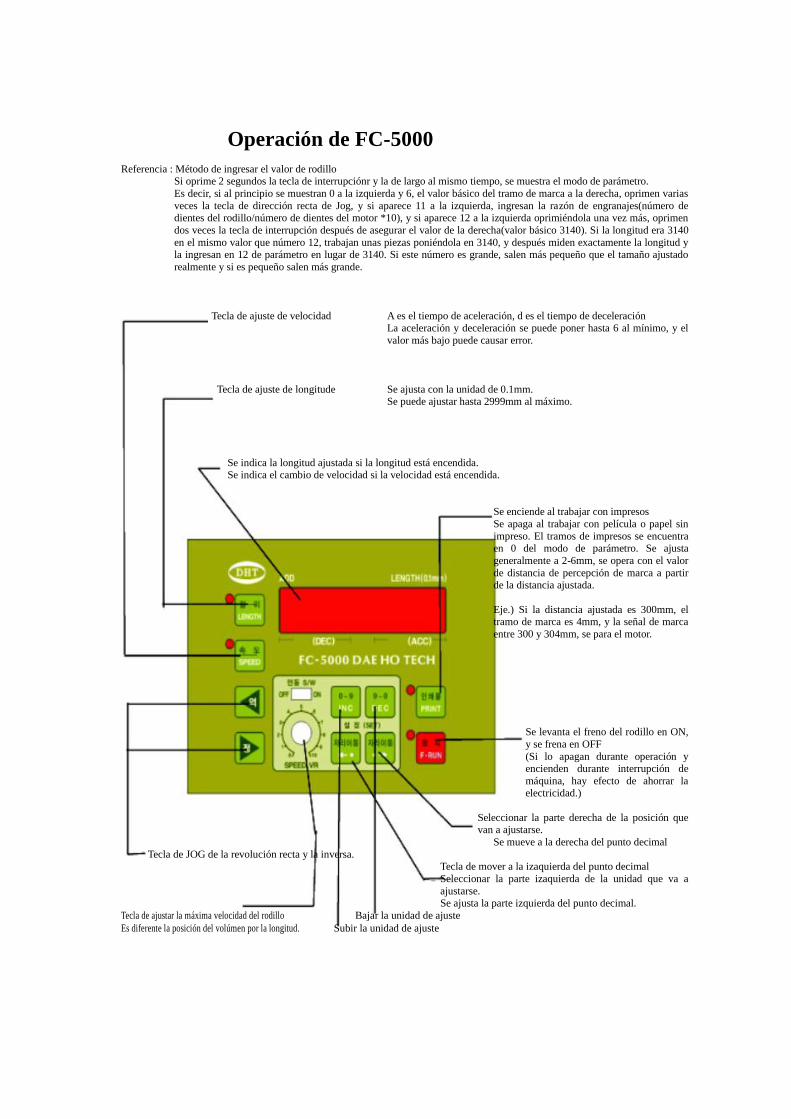
Tecla de ajuste de velocidad A es el tiempo de aceleración, d es el tiempo de deceleración
La aceleración y deceleración se puede poner hasta 6 al mínimo, y el
valor más bajo puede causar error.
Tecla de ajuste de longitude Se ajusta con la unidad de 0.1mm. Se puede ajustar hasta 2999mm al máximo.
Se indica la longitud ajustada si la longitud está encendida. Se indica el cambio de velocidad si la velocidad está encendida.
Se enciende al trabajar con impresos
Se apaga al trabajar con película o papel sin
impreso. El tramos de impresos se encuentra
en 0 del modo de parámetro. Se ajusta
generalmente a 2-6mm, se opera con el valor
de distancia de percepción de marca a partir de la distancia ajustada.
Eje.) Si la distancia ajustada es 300mm, el tramo de marca es 4mm, y la señal de marca
entre 300 y 304mm, se para el motor.
Se levanta el freno del rodillo en ON,
y se frena en OFF
(Si lo apagan durante operación y encienden durante interrupción de
máquina, hay efecto de ahorrar la electricidad.)
Seleccionar la parte derecha de la posición que van a ajustarse.
Se mueve a la derecha del punto decimal
Tecla de JOG de la revolución recta y la inversa. Tecla de mover a la izaquierda del punto decimal
Seleccionar la parte izaquierda de la unidad que va a
ajustarse. Se ajusta la parte izquierda del punto decimal.
Tecla de ajustar la máxima velocidad del rodillo Bajar la unidad de ajuste
Es diferente la posición del volúmen por la longitud. Subir la unidad de ajuste
Precaución para prevención del incendio y choque eléctrico Cuando oprime una vez la tecla F-Run en el estado de la energía encendida, se interrupe la energía al
motor y el motor se vuelve al estado de FREE RUN..(Para la máquina de cortar, cuando suben la
temperatura del calentador al inicio de operación o paran un rato la máquina, pueden diminuir
calentamiento del motor y ahorrar la electricidad si encienden la tecla de interrupción.Además el
motor mantiene el estado de interrupción. Para cancelarlo, oprimen una vez más la tecla de
interrupción.
En el estado de la energía encendida, no abra la tapa durante la operación y no opere con la tapa
abierta. Esto causa el choque electrico.
Á l instalar Driver o inspeccionar periódicamente, interrumpa la energía y lo ejecute después de
asegurar la descarga del voltage de la corriente directa con probador después del transcurso de 8
minutos.
(Por favor lo realice personalmente el técnico profesional.)
Instale en el material a prueba de fuego para prevenir indencio, y como la resistencia de resucitación
puede causar alta pirexia, en caso de instalar en o cerca del material inflamable, lo cual puede ser
provocar incendio y se require una precuación especial, y como puede corer el alto voltabe, tenga
cuidado con sacudida eléctrica.
Si no interrumpe inmediatamente la energía en el momento de avería del driver, puede ocurrir
incendio por el segundo accidente.
Sobre todo puede haber sobrecalentamiento de la resistencia de resucitación por avería, por lo cual
úselo con mucho cuidado.
Precaución en cableado
La energía de input es monofásico o tres-fase, y el voltage apropiado es AC 200V-230V.
Para la caja del driver, haga la conexión triple a tierra.
Para el driver dañado, no ingrese la energía.
Use el interior del driver para que no entren tornillos, escombro y material metálicos, los materiales
inflammables como aceite.
Asegúrese de que la conexión de cada terminal no cambia, y en el caso de la energía de monofásico,
conéctelo al terminal R.S.
Cambie mutuamente los ejes U,V de output para cambiar la rotación del motor.
No use el capacitor avanzado de fase, filtro CG, filtro de ruido, etc. para el eje de output(terminales
U.V.W).
Antes de la operación, se podría necesitar cambio de parámetro de acuerdo con los equipos aplicados.
Se necesita la protección contra el daño de los aparatos electrónicos que se usan cerca del driver.
No mida la resistencia de insulación(mega probador) en la parte de control y el terminal de output.
En caso de inicializar el parámetro, opérelo después de reajustar el parámetro.
1. Cuando la energía se enciende en el estado de oprimir F-Run + print, se indica FcPdrn y todos los
parámetros se inicializan excepto la razón de engranajes del Número 11 del modo de datos y el valor
de rodillo de Número 12.(En el momento de ocurrir error, en el caso común se opera normalmente
cuando se apaga la enrgía totalmente en la parte indicadora después de interrumpirla y reingresa la
energía, pero si no se opera normalmente y sigue indicando error expeto de los errores de OC y OE
después de reingreso de la energía, se usará este modo.
2. Si se oprime el botón de F-Run + length(largo) más de 5 segundos después del ingreso de la energía,
todos los parámetros se inicializan. En este caso, deberá reajustar la razón de engranajes, el valor de
circunferencia de rodillo, etc. entrando en el modo de parámetro.
Mantenimiento, reparación y revisión
Driver, como un producto electrónico para uso industrial, podría tener avería por la influencia de
temperature, humedad, vibración, etc., y el cambio de partes por envejecimiento . Para prevenir esto,
se requiere la revision regular.
Para las partes requeridas principalmente la revision, chequee si los pernos de los terminales están
aflojados, han entrado las substancias extrañas en el interior del driver o el ventilador enfriador o hay
problema de la revolución del ventilador enfriador, cambio externo del condensador y reducción de
la capacidad, contacto defectuoso del aparato del contacto electronic o ruido grave, etc..
(En caso de ventilador enfriador, si opera constantemente, reemplácelo cada 2~3 años, y en caso de
condensador para uso normal,generalmente puede cambiarlo cada 4~5 años, pero el deterioro de la
característica del condensador procede repentinamente en algún momento, por lo cual, deberá
realizar regularmente la revisión cada 6 meses y reemplazarlo con producto nuevo cada 5 años.)
El período de garantía de producto será generalmente 12 meses a partir de la fecha de instalación.
En caso de ocurrir alguna avería dentro del período de garantía en el estado de uso normal, la
reparamos gratuitamente si lo pide a nuestra compañía.
En los casos siguientes, se tartan como servicio oneroso.
1. En caso de pasar el period de garantía gratuita
2. En caso de ocurrir la avería por la defección de la fuente energética usada o por mala conexión del
terminal.
3. En caso de modificar o reparar el producto en el lugar que no es el centro de servicio de nuestra
compañía
4. En caso de ocurrir la vería por descuidado o mala intención de consumidores.
5. En caso de avería por la calamidad natural tales como incendio, inundación, daño de gas,
terremoto, etc.
Especificación de las partes Ventilador enfriador : anchura*logitud=90mm*90mm
Voltage de la energía: 220V Condensador para uso normal: 450WV, 470uF*4unidades Para el cable de energía y el de conexión de motor, use, por lo menos, más de 2 SQ.. Para el input de la energía, suminitra la energía seleccionando el interruptor para cableado o el
interrupor para corto circuito dentro del rango permitido de especificación de la energía.
Uso de FC-5000 1) Trabajo con película y papel sin impreso
Ajuste la distancia de ajuste en 0.1mm. Se puede ajustar por máximo hasta 2999mm, y si ajusta 18
en 3 sobre parámetro, puede ajustar por máximo hasta 29,000mm(29.9m) con unidad de 1mm.
2) Trabajo con impresos por solenoide
Al trabajar con impresos por solenoide llamado semiconductor, se usa este modo, y ajuste la longitud
total más por tanto largo de los impresos aumentados(en general 3-6mm más larga). Aquí el ajuste
del tramo de señal sincrónica se puede hacer en el modo de parámetro 1. La demora de la señal
sincrónica será 100 seg.
3) Método de trabajo, como uso exclusivo para una línea, de que el motor mismo se controla por
la señal de impresores.
Este método es como uso exclusivo para una línea, si la señal del sensor de marca ingresa al driver,
el motor se para y imprime. El método de ajuste es ajustar el largo 3-6mm más corto que un corte de
impresor en la ventanita de distancia de ajuste y se hace este modo cuando se enciende la lámpara
por oprimir el botón de impresor. En este momento, el tramo de percibir la impresión es el valor 0
del parámetro, y se puede ajustar el tramo de marca desde 1 hasta 10mm. El principio de operación
es como sigue: si el valor ajustado del largo de transmisión es 300mm y el valor de tramo de marca
es 6mm, y se ingresa la señal de marca entre 300mm y 306mm, el motor reduce la velocidad en este
tramo y se para después revolución(operación con la velocidad de búsqueda de marca en el 2 de
parámetro). Es decir para el tramo de marca, se aplica la distancia de tramos de impresor al tramo
después de la distancia transmitida.
Para cancelar el modo de impresos, si oprime el botón de impresos y se apaga la lámpara, se vuelve
al estado de trabajo con película y papel sin impreso.(Es adecuado con 50 el número 2 de parámetro
de la velocidad de búsqueda de marca)
El trabajo se realiza sin problema siempre cuando el sensor de marca envíe exactamente la señal de
percepción de marca solo en marca. Como el motor se para por esta señal, si suena el zumbador del
error de marca durante trabajo, se deberá reajustar el grado de percepción de marca de acuerdo con el
color. El motor se para por esta señal, cuando no entra la señal de impresos dentro del tramo de
marca, suena el zumbador del controlador.
Referencia)
Método de ajuste de la razón de engranajes electrónicos
Para el ajuste de la razón de engranajes electrónicos, se deberá ingresar el número de dientes de
polea del eje de rodillo y el del eje de motor, y el valor de la circunferencia del rodillo, con lo cual se
puede operar de acuerdo con la longitud ajustada.
Para ingresar la razón de engranajes en el parámetro, si oprime el botón de logintud en la parte
superior de la izquierda al mismo tiempo en el estado de oprimir el botón de interrupción en la parte
inferior de la derecha, entra en el modo de parámetro. Además si oprime los botones de la dirección
recta y la inversa, aparecen el número de parámetro en la parte izquierda y los datos en la derecha, y
la modificación de los datos se realiza con el botón de cambiar puesto y el de subir y bajar el número
como ajustar la longitud. En este momento el valor de la parte izquierda 11 es la razón de engranajes
y el número 12 es el valor de circunferencia del rodillo. Opera la máquina después de ajustar la
distancia de transmisión(distancia ajustada) con el mismo valor del dato del número 12, y trabaja
correctamente unas hojas, y luego mide correctamente la longitud por unidad de 0.1mm(si realiza
correctamente este proceso, será adecuado el largo) y ingresa este valor en el número 12 del modo de
parámetro, en lugar del valor de la parte derecha.
Motor
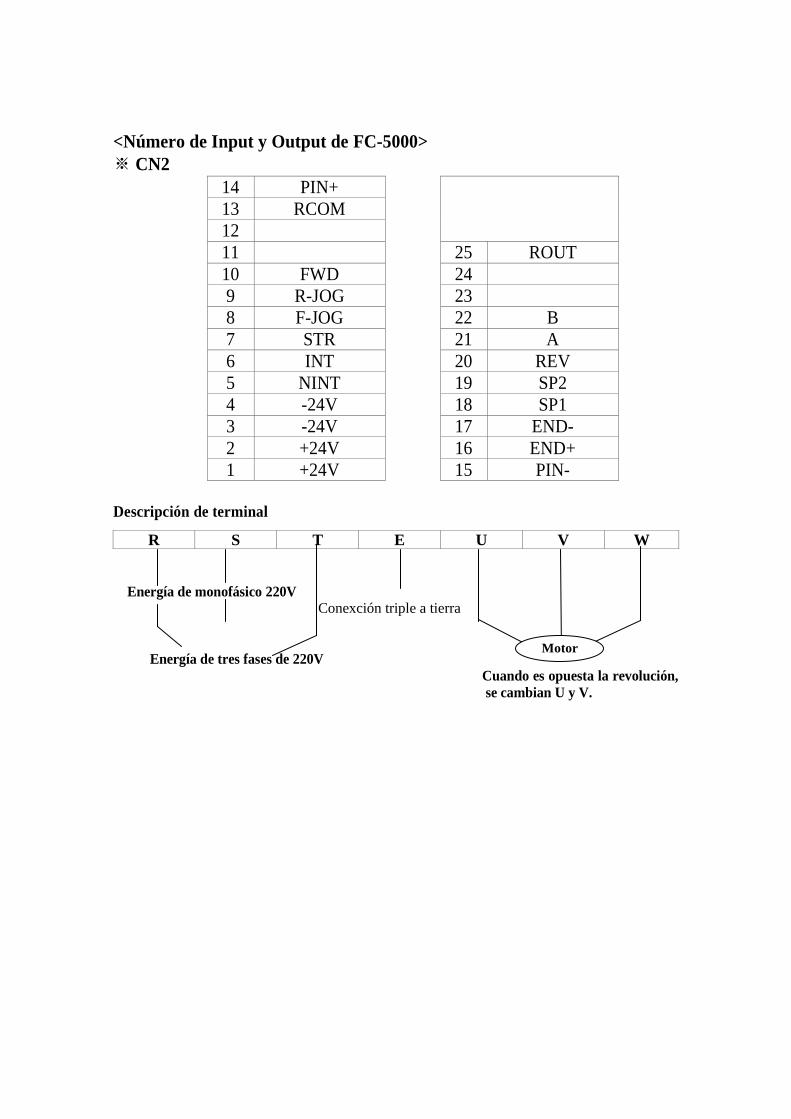
<Número de Input y Output de FC-5000>
※ CN2
14 PIN+
13 RCOM
12
11 25 ROUT
10 FWD 24
9 R-JOG 23
8 F-JOG 22 B
7 STR 21 A
6 INT 20 REV
5 NINT 19 SP2
4 -24V 18 SP1
3 -24V 17 END-
2 +24V 16 END+
1 +24V 15 PIN-
Descripción de terminal
Energía de monofásico 220V
Conexción triple a tierra
Energía de tres fases de 220V
Cuando es opuesta la revolución,
se cambian U y V.
R S T E U V W
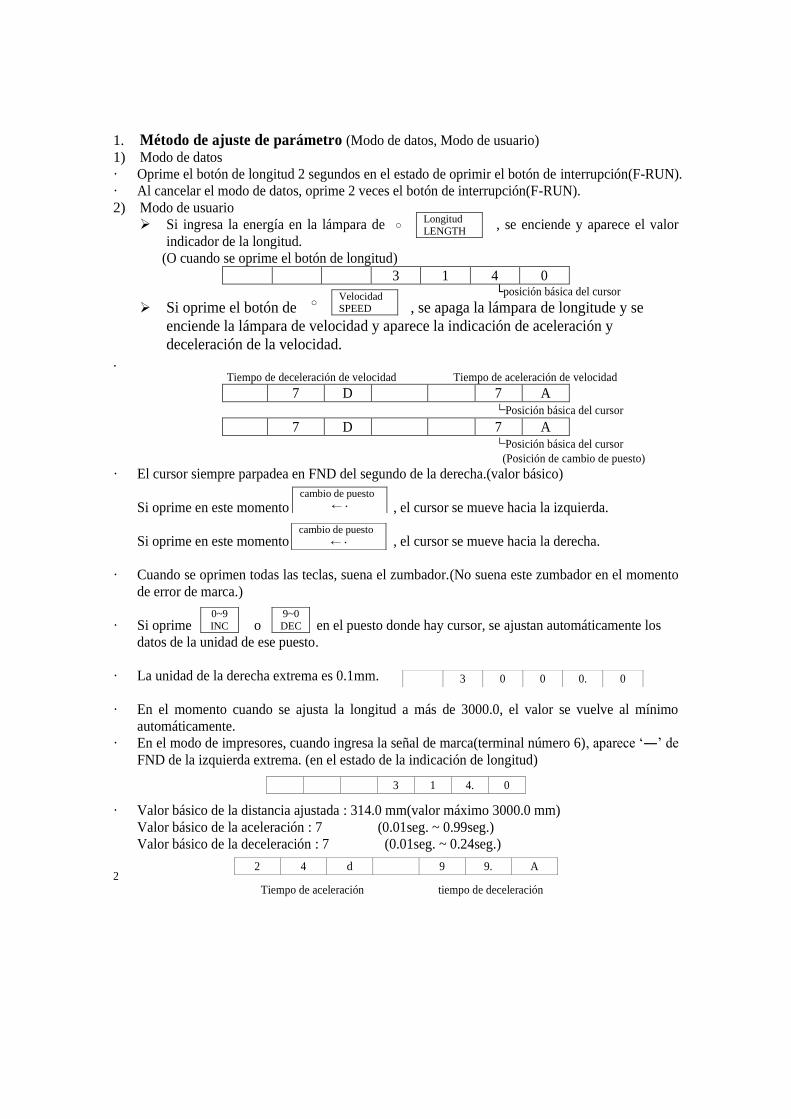
1. Método de ajuste de parámetro (Modo de datos, Modo de usuario)
1) Modo de datos
· Oprime el botón de longitud 2 segundos en el estado de oprimir el botón de interrupción(F-RUN).
· Al cancelar el modo de datos, oprime 2 veces el botón de interrupción(F-RUN).
2) Modo de usuario
Si ingresa la energía en la lámpara de , se enciende y aparece el valor
indicador de la longitud.
(O cuando se oprime el botón de longitud)
3 1 4 0 └posición básica del cursor
Si oprime el botón de , se apaga la lámpara de longitude y se
enciende la lámpara de velocidad y aparece la indicación de aceleración y
deceleración de la velocidad. .
Tiempo de deceleración de velocidad Tiempo de aceleración de velocidad
7 D 7 A └Posición básica del cursor
7 D 7 A └Posición básica del cursor
(Posición de cambio de puesto) · El cursor siempre parpadea en FND del segundo de la derecha.(valor básico)
Si oprime en este momento , el cursor se mueve hacia la izquierda.
Si oprime en este momento , el cursor se mueve hacia la derecha.
· Cuando se oprimen todas las teclas, suena el zumbador.(No suena este zumbador en el momento
de error de marca.)
· Si oprime o en el puesto donde hay cursor, se ajustan automáticamente los
datos de la unidad de ese puesto.
· La unidad de la derecha extrema es 0.1mm.
· En el momento cuando se ajusta la longitud a más de 3000.0, el valor se vuelve al mínimo
automáticamente.
· En el modo de impresores, cuando ingresa la señal de marca(terminal número 6), aparece ‘―’ de
FND de la izquierda extrema. (en el estado de la indicación de longitud)
· Valor básico de la distancia ajustada : 314.0 mm(valor máximo 3000.0 mm)
Valor básico de la aceleración : 7 (0.01seg. ~ 0.99seg.)
Valor básico de la deceleración : 7 (0.01seg. ~ 0.24seg.)
2
Tiempo de aceleración tiempo de deceleración
3 0 0 0. 0
3 1 4. 0
2 4 d 9 9. A
○ Longitud LENGTH
○ Velocidad SPEED
cambio de puesto
←
cambio de puesto
←
0~9
INC
9~0
DEC
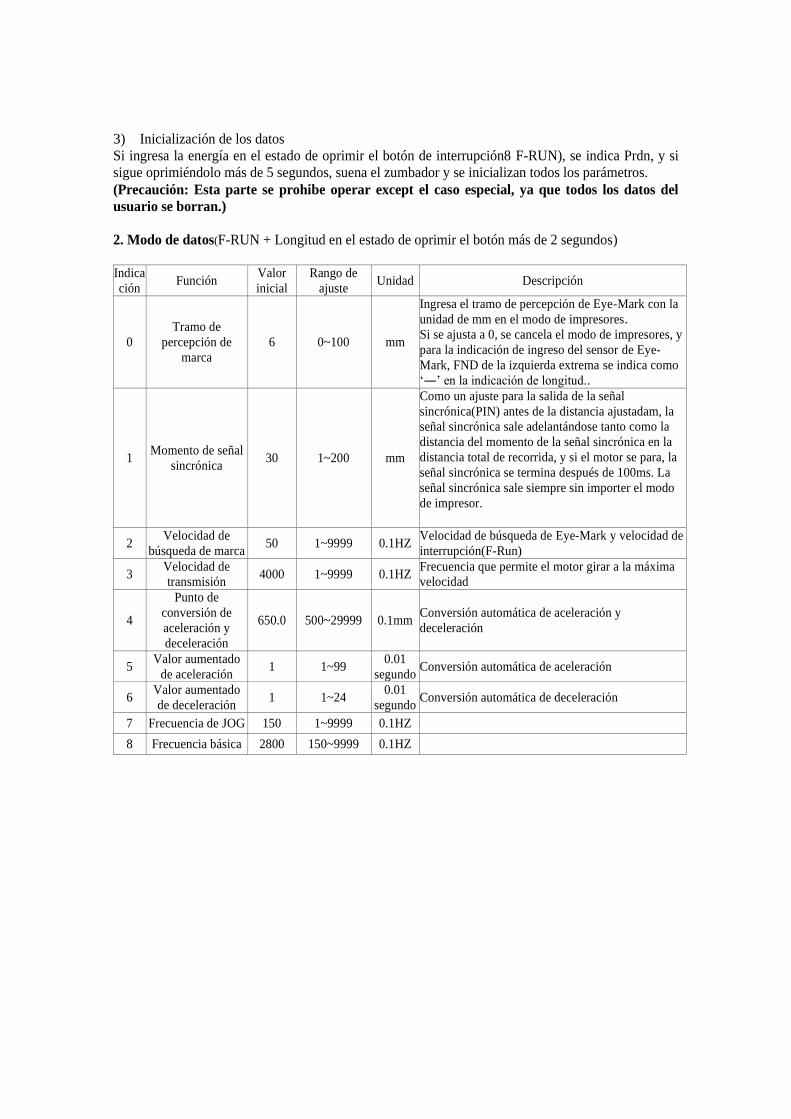
3) Inicialización de los datos
Si ingresa la energía en el estado de oprimir el botón de interrupción8 F-RUN), se indica Prdn, y si
sigue oprimiéndolo más de 5 segundos, suena el zumbador y se inicializan todos los parámetros.
(Precaución: Esta parte se prohibe operar except el caso especial, ya que todos los datos del
usuario se borran.)
2. Modo de datos(F-RUN + Longitud en el estado de oprimir el botón más de 2 segundos)
Indica
ción Función
Valor
inicial Rango de
ajuste Unidad Descripción
0 Tramo de
percepción de
marca 6 0~100 mm
Ingresa el tramo de percepción de Eye-Mark con la
unidad de mm en el modo de impresores. Si se ajusta a 0, se cancela el modo de impresores, y
para la indicación de ingreso del sensor de Eye-
Mark, FND de la izquierda extrema se indica como
‘―’ en la indicación de longitud..
1 Momento de señal
sincrónica 30 1~200 mm
Como un ajuste para la salida de la señal
sincrónica(PIN) antes de la distancia ajustadam, la
señal sincrónica sale adelantándose tanto como la
distancia del momento de la señal sincrónica en la
distancia total de recorrida, y si el motor se para, la
señal sincrónica se termina después de 100ms. La
señal sincrónica sale siempre sin importer el modo
de impresor.
2 Velocidad de
búsqueda de marca 50 1~9999 0.1HZ
Velocidad de búsqueda de Eye-Mark y velocidad de
interrupción(F-Run)
3 Velocidad de
transmisión 4000 1~9999 0.1HZ
Frecuencia que permite el motor girar a la máxima
velocidad
4
Punto de
conversión de
aceleración y
deceleración
650.0 500~29999 0.1mm Conversión automática de aceleración y
deceleración
5 Valor aumentado
de aceleración 1 1~99
0.01
segundo Conversión automática de aceleración
6 Valor aumentado
de deceleración 1 1~24
0.01
segundo Conversión automática de deceleración
7 Frecuencia de JOG 150 1~9999 0.1HZ
8 Frecuencia básica 2800 150~9999 0.1HZ

9 Reforzador de
cerradura 10 0~100 %
10 Frecuencia de
arranque 5 1~999 0.1HZ
11
Razón de
engranajes
electrónicos
(molécula)
20 5~50 Razón de engranajes electrónicos
Número de engranajes en el rodillo/ Número de
engranajes en el motor*10
12 Circunferencia de
Rodillo 3140 500~20000 0.1mm
Distancia de transmisión por una revolución de
Rodillo Se ajusta la circunferencia de Rodillo transmitido
con la unidad de 0.1mm.
13 Salida de
Relevador 1
0~7 Función de
ROUT-
RCOM
Seleción de la function de la salida de Relevador 0: Interrupción de la function de la salida de
Relevador 1 : Salida de ALARMA 2 : Llegada de la distancia ajustada 3. Señal de interrupción 4. Salida de tramo de percepción de Eye Mark
5: - 6: Salida de Error de Marca(5-10ms) (Se puede prolonger por el terminal P4) 7. Llegada de contador ajustado
14 Frecuencia de
freno de DC 15 0~999 0.1HZ
15 Nivel de freno de
DC 7 0~100 %
16 Corriente nominal 250 0~1000 0.1A
17 Ajuste de contador 60000 0~60000
Se elimina con el botón de aceleración y
deceleración (sólo en el estado de oprimir el botón de longitude
3 segundos.)
18 Ajuste de multi-
función 9 0~3
Número de
ajuste COMANDO
DE VR Distancia
ajustada *10 Salida de
PULSO
0 X X X
1 O X X
2 X O X
3 O O X
4 X X O

3. Entrada(Input) /Salida(Output)
· Salida de END, --24V : Señal de interrupción o 2.5HZ Duty Cycle
· Salida de PIN, -24V : Señal sincrónico(Ver el número 1 del modo de datos) o salida de tramo de
percepción de marca(Se apaga con el paso de 100 ms después de terminar la operaión del motor)
· F-JOG, -24V : Transmisión de Jog de la dirección recta
· R-JOG, -24V : Transmisión de Jog de la dirección inversa
4. Descripción de la función de EYE MARK
1) La función de EYE-MARK es movimiento para transmitir a la posición correcta aplicando el
sensor de impresos.
Si entra la señal del sensor de impresos, se inicia inmediatamente la deceleración y se para.
2) La señal de EYE-MARK entra en el terminal de INT(INT-24V)(Sensor del tipo NPN )
3) Si se ajusta el tramo de percepción de EYE-MARK(Número 0 del modo de datos) a 0, no se
activa la función de percepción de EYE-MARK.
4) Percibe la señal del sensor de Marca sólo en el tramo de percepción, y decelera y para.
5) Si no entra EYE-MARK hasta pasar el tramo de percepción de EYE-MARK, aparece el Error de
Marca y muestra el sonido de control de zumbador desde el terminal exterior.(Cuando es 6 el 13
de parámetro)
6) Usa conectando el número 1 de CN2 del conectador con +, el número 5 con el sensor –y el
número 6 on la línea de señal del sensor de Marca.
Eje) Cuando se ajusta la distancia a 1000mm(10000) y el tramo de percepción de EYE-MARK a
6, el tramo de percepción real de EYE-MARK es 1000mm-1006mm.(rango de percepción 6mm)
5. Señal sincrónica
1) Es la function de mandar señal justamente antes de parar el motor al operar conectando con otro
aparato.
2) Se puede ajustar con anticipación el punto de partido en el que se manda la señal
sincrónica(número 1 del modo de datos), y si se para el motor, se apaga la señal más o menos
100mseg.después.
6. Cambio de la velocidad de transmisión
1) Se puede ajustar la velocidad máxima(número 3 del modo de datos)
2) Se ajusta la aceleración y deceleración generalmente oprimiendo el botón de
velocidad(SPEED).(En cambio de la velocidad, se puede ocurrir error ”OE” si el valor de
deceleración es menos de 8d cuando la longitud de uso es más de 700mm después de ajuste del
valor adecuado entre 6 y 8,m en este momento se ajusta sólo la deceleración a una etapa más alta
como 8d o 9d. Si aumenta el número de cambio de la velocidad, reduce tanto la velocidad del
rodillo. Si el valor de aceleración es menos de 6A, se puede sobreoperar, por eso en esta
situación, deberá aumentar el valor de aceleración en dos etapas. Pero si no ocurre error, se
puede usar este valor hasta 5d, 5A.
7. Transmisión de JOG
1) Número 8 de conectador y -24V : Jog de dirección recta.
Número 9 de conectador y -24V : Jog de dirección inversa
2) Cuando se para el motor, se transmite a la velocidad ajustada de JOG(velocidad del valor 7 del
modo de datos) si oprime ‘dirección recta’ o ‘dirección inversa’.
3) Cuando el motor se opera por JOG, se puede funcionar por JOG aunque se ingresa STR del
terminal 7, y sólo cuando no se opera por JOG, se puede funcionar por STR 7.(Además no se
funciona JOG cuando se opera por STR).
8. Contador de trabajo
1) REAJUSTE DE CONTADOR : Si oprime el botón de interrupción(F-RUN) en el estado de
indicación del contador de trabajo en la selección de tipo de indicación(después de oprimir el
botón de velocidad), se elimina el contador de trabajo actual a 0. El contador de trabajo actual se
borra 0 cuando se apaga la energía.
2) Ajuste de contador de trabajo
Si el contador de trabajo llega al contador ajustado(ajuste del contador de trabajo), se enciende
Relevador y cuando se inicia el próximo trabajo, el contador se reajusta a 0.(el número 13 del
modo de datos es 7)
(Se deben eliminar el Contador después de ajuste)
Si se ajusta el 17 del modo de datos a 0, se para la función de reajuste del contador de trabajo.
3) El contador de trabajo se muestra sólo en el estado de indicación de velocidad.
4) Al cancelar, oprime el botón de velocidad.
c 0 Contador de trabajo
9. Uso de output de PULSO de ajuste de multifunción.
Cuando se prueba el controlador de FC-5000 sin conexión con la máquina, se puede experimentar la
operación de serie por maniobra del motor o PULSO de entrada de EYE-MARK.
Si ingresa un número entre 0 y 4 al 18 del modo de datos(ajuste de multifunción), sale el pulso
continuo .(2.5Hz DUTY CYCLE) a interválos de 200ms desde la salida de END(terminales 16 y 17)
Si se conectan el 17 de conectador con -24V y el 16 con el 7(STR), se puede hacer operación repetida
sin ingresar la señal de maniobra del motor desde el exterior.
10. Estado de modo de indicación(se muestra sólo en el estado de indicación de longitud.)
· Si oprime el botón de 2 segundos, se vuelve al modo de indicación y si lo
oprime cortamente, cambia el tipo de indicación.
Sigue funcionado normalmente durante la operación.
· Se cancela el modo de indicación si oprime otra vez el botón de .
Indica la posición actual después de transmitirse a
la distancia ajustada.(unidad: mm)
Indica el número de vez de transmisición a la
distancia ajustada. (unidad : vez)
Indica el número de vez de trabajo por
minuto.(unidad: rpm)
Indica la frecuencia de revolución del motor
actual.(Unidad: Hz)
1) L . 0
2) C . 0
3) r . 0
4) F 1. 5
○ Longitud
LENGTH
○ Velocidad
SPEED
Posición actual
Contador de trabajo
RPM de trabajo
Frecuencia actual
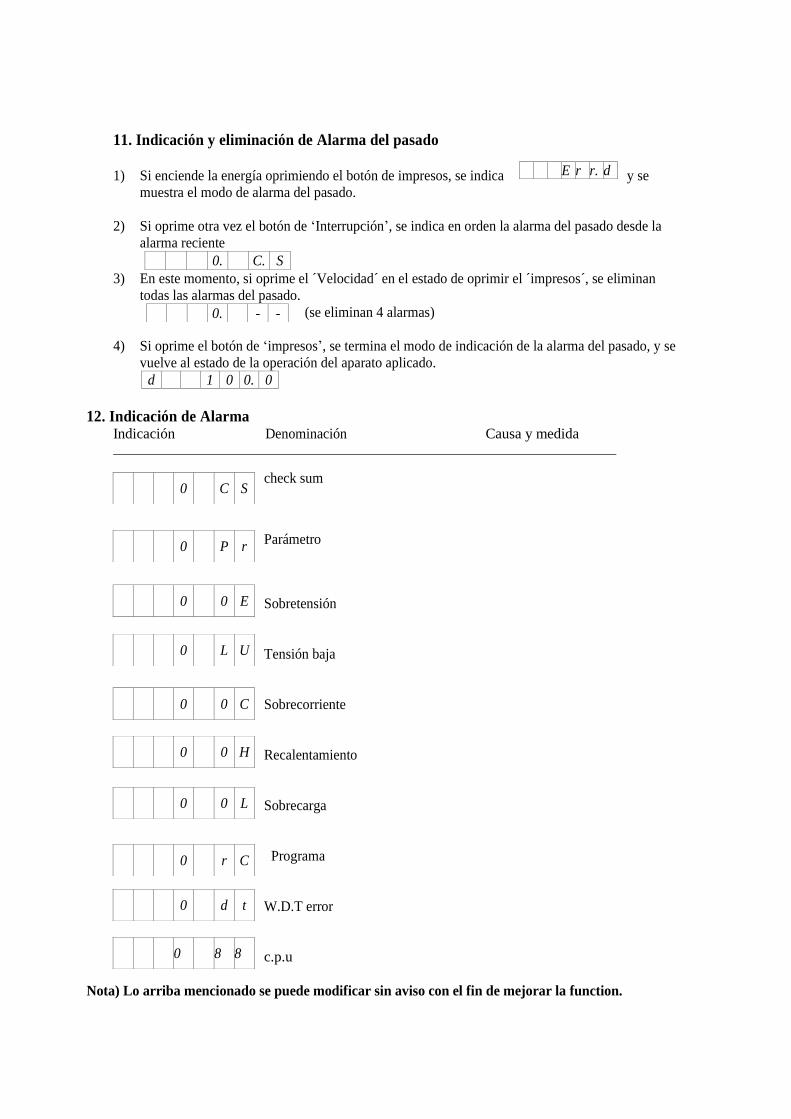
11. Indicación y eliminación de Alarma del pasado
1) Si enciende la energía oprimiendo el botón de impresos, se indica y se
muestra el modo de alarma del pasado.
2) Si oprime otra vez el botón de ‘Interrupción’, se indica en orden la alarma del pasado desde la
alarma reciente
0. C. S
3) En este momento, si oprime el Velocidad en el estado de oprimir el impresos , se eliminan
todas las alarmas del pasado.
(se eliminan 4 alarmas)
4) Si oprime el botón de ‘impresos’, se termina el modo de indicación de la alarma del pasado, y se
vuelve al estado de la operación del aparato aplicado.
d 1 0 0. 0
12. Indicación de Alarma
Indicación Denominación Causa y medida
check sum
Parámetro
Sobretensión
Tensión baja
Sobrecorriente
Recalentamiento
Sobrecarga
Programa
W.D.T error
c.p.u
Nota) Lo arriba mencionado se puede modificar sin aviso con el fin de mejorar la function.
E r r. d
0. - -
0 C S
0 P r
0 0 E
0 L U
0 0 C
0 0 H
0 0 L
0 r C
0 d t
0 8 8

Diagrama de conexción de línea de I/O y colores de cableado
Tipo NPN de sensor de proximidad
Tipo NPN de sensor de marca
Caja de semiconductor
Caja de semiconductor
Para servo
Para sensor del
tipo NPN Señal sincrónica
Señal sincrónica
rojo
azul
blanco
negro
amarillo
marrón
gris
sincronización
sincronización
(2 filas)
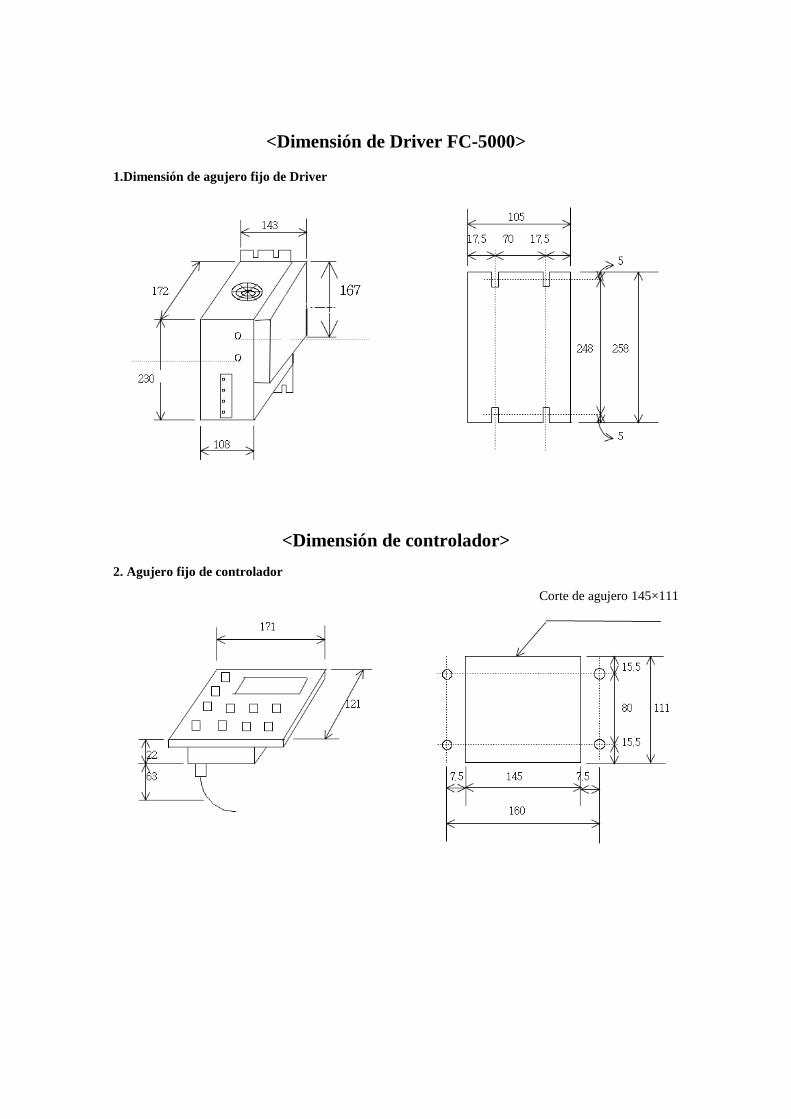
<Dimensión de Driver FC-5000> 1.Dimensión de agujero fijo de Driver
<Dimensión de controlador>
2. Agujero fijo de controlador
Corte de agujero 145×111

NOTA
Nota) Lo arriba mencionado se puede modificar sin aviso con el fin de mejorar la función.
Además no se permiten cualquier uso sin permiso y copia excepto el caso para usar los
productos de Daeho.
FC-5000 OPERATING
INSTRUCTIONS
DAE HO TECH
TEL: 070-7150-4355
TEL: (02)971-0942
FAX; (02)971-0942
www.dhw.kr
E-mail: [email protected]

Instructions for the prevention of the fire and electric shock at the time of use
■ In case when one pushes F-Run key at the state where the power is input, the power is
cut off to the motor, and the motor becomes the FREE RUN state. (In case when the
heat is increased in the heater at the initial stage of the operation or when one halts the
motor for the moment during the re-standby, after one turns ON the F-Run key, he may
save the electricity and reduce the calorification. Or the motor maintains the F-Run state.
At the time of cancellation, push the F-Run key once more.)
■ During the operation at the state where the power is input, neither open the cover nor
operate it at the state the cover is opened. It may become the cause of the electric shock.
■ At the time of installation of the driver and of the regular check, cut off the power,
and execute it after 8 minutes had passed and after checking that the direct current
voltage was radiated with the tester bar. (Request that specialized technician conduct it
directly)
■ Install it on the fire-proof materials for the prevention of the fire, and since the
resuscitation resistance may entail much calorification, be careful especially since in
case one installs it on the inflammable materials or near them, it may become the cause
of the fire. Since the high voltage may flow, be careful of the electric shock.
■ In case one does not cut off the power right away at the time of failure of the driver,
the fire attributable to the secondary accident may occur.
■ Especially, since there may be overheating due to the failure, be careful in using it.
Matters that demand special attention at the time of wiring
■ The proper voltage is AC 200V-230V as the input power is single or 3rd phase. ■ For the case of the driver, ground it threefold. ■ For the driver damaged, do not input the power in it. ■ Use the inside of the driver so that the screws, steel pieces or metal materials and
inflammable materials such as oil may not enter it. ■ Be sure that the connection of each terminal not change, and in case it is the single
phase power, connect it to the R S terminal. ■ In order to change the revolution of the roller, change the U, V axes of the output
mutually. ■ For the axis of the output(terminals U.V.W.), do not use the phase advanced

capacitator, CG filter, noise filter, etc.. ■ Before the operation, there may be the case when the various types of Parameters
require change according to the applied equipments. ■The protection against the damage of the electronic instruments being used near the
place where the driver is located shall be required. ■ Do not conduct the insulation resistance measurement(mega tester) on the control part
and output terminal. ■ In case where the Parameter is initialized, operate it after re-setting up the Parameter.
1. When the power is put in at the state where the F-Run + print are pushed, FcPrdn
shows, and all Parameters besides Data mode No 11 gear ratio and No 12 roller value
are initialized.(The common thing at the time of error generation is that although in case
the power is put in again after all the power went out from inside the indication part
after the power is cut off, the normal operation is possible, but in case the normal
operation is not possible showing errors excepting OC error, this mode shall be used at
this time.)
2. In case the power is put in at the state where the F-Run + length are pushed, Prdn
shows and all the Parameters change to the plant shipping value.
Maintenance, repair and check ■ Driver, as the industrial electronic product, may generate failures because of the
impact of the temperature, moisture, vibration, etc. and aging change of the parts. In
order to prevent them, daily check is required.
■ For the parts mainly requiring checks, check whether the bolts of the terminals are
loose, whether the foreign objects entered inside of the driver or into the cooling fans, or
the unsatisfactory revolution of the cooling fans, reduction of the capacity, external
change of electrolysis condenser and unsatisfactory link of the electronic contact
instruments, severe noise, etc.. Replace the parts having abnormality after the check. (In case of the continuous operation for the cooling fans, replace them once in every 2-3
years. Even if it is 4-5 years in the case of the dilatory condenser, since the decrease of
the feature of the condenser proceeds rapidly during the certain period, check it
regularly once every 6 months and replace it with the new product once every 5 years.)
■ The product warranty period is 12 months from the date of installation generally.

■ For the free service, we will repair it free for you in case you request to this company
within the product warranty period when the failures occurred at the state of normal use.
■ In case of the following items, they shall be processed in paid service: 1. In case the free warranty period passed. 2. In case the failures occurred because of the unsatisfactory power used or wrong
terminal link. 3. In case one changes or repairs the products at the places which are not service centers
of this company. 4. In case when the failures occurred because of the carelessness or deliberation of the
consumers. 5. In case when the failures occurred because of the natural calamities such as fire, flood
damage, gas damage, earthquake and other damages.
Specifications of parts ■ Cooling fan: in width and length=90mm*90mm Power voltage: 220V ■ Dilatory condenser: 450WV, 470uF*4EA ■ For the power cable and motor linking cable, use more than minimum of 2SQ. ■ For the power input of the driver, supply the power selecting the wiring breaker or
short circuit breaker within the range of the power specification allowed.
p4 1. Method of setting up the Parameter(Data mode, User mode) 1) Data mode Push Length S/W for 2 seconds at the state of pushing F-RUN. At the time of cancelling data mode, push F-RUN S/W twice. 2) User mode When the power is put into the lamp of the LENGTH, it becomes ON, and indication
value of the LENGTH shows.
3 1 4 0
↳ Basic location of the cursor
When S/W of the SPEED is pushed, LENGTH lamp becomes OFF and SPEED lamp
becomes ON, and acceleration and deceleration indications show.
7 d 7. A
Deceleration time Acceleration time ↳ Basic location of the cursor
The cursor always flickers at the second FND at the right. (Basic value) At this time, if one pushes Shift, the cursor moves to the left. If one pushes Shift, the cursor moves to the right.
When all keys are pushed, the buzzer rings.(At the time of the Mark error, this buzzer
does not ring)
When one pushes (0-9 INC) or (9-0 DEC), the data is automatically set up on the
place unit.
The LENGTH unit is set up in the 0.1mm unit basically.
For the LENGTH set up, more than 2999.0mm shall not be set up, and when it is set
up in 2999.0, it shall be set up after lowering 3 to 2, 1 or 0.
At the time of setting up more than 2999.9mm, 29,999mm(29.9m) may be set up in
the unit of 1mm. At this time, set up 9 of the Parameter No 18(0.1mm unit) as 3(1mm
unit).
At the time of Print mode, when Mark (No 6 terminal) signal is input, "-" at the
extreme FND shows. (at the state of LENGTH indication)
- 3 1 4. 0
Basic value of distance set up: 100.0mm(maximum value 2999.9 mm) Basic value of acceleration time: 7 (0.01 sec~0.99 sec) Basic value of deceleration time: 7 (0.01 sec~0.24 sec)
3) Initialization of data When the power is put in at the state where F-RUN and LENGTH are pushed, Prdn
shows, and all Parameters become initialized completely. When the power is put in at
the state where F-RUN and Print are pushed, F-RUN shows, and all Parameters
excepting No 11 and No 12 become initialized. (Method of initializing for the
protection of the electronic gear ratio).
2. Data mode(the state where F-RUN + LENGTH S/W are pushed for 2 seconds) At the time of cancellation, push F-RUN twice.
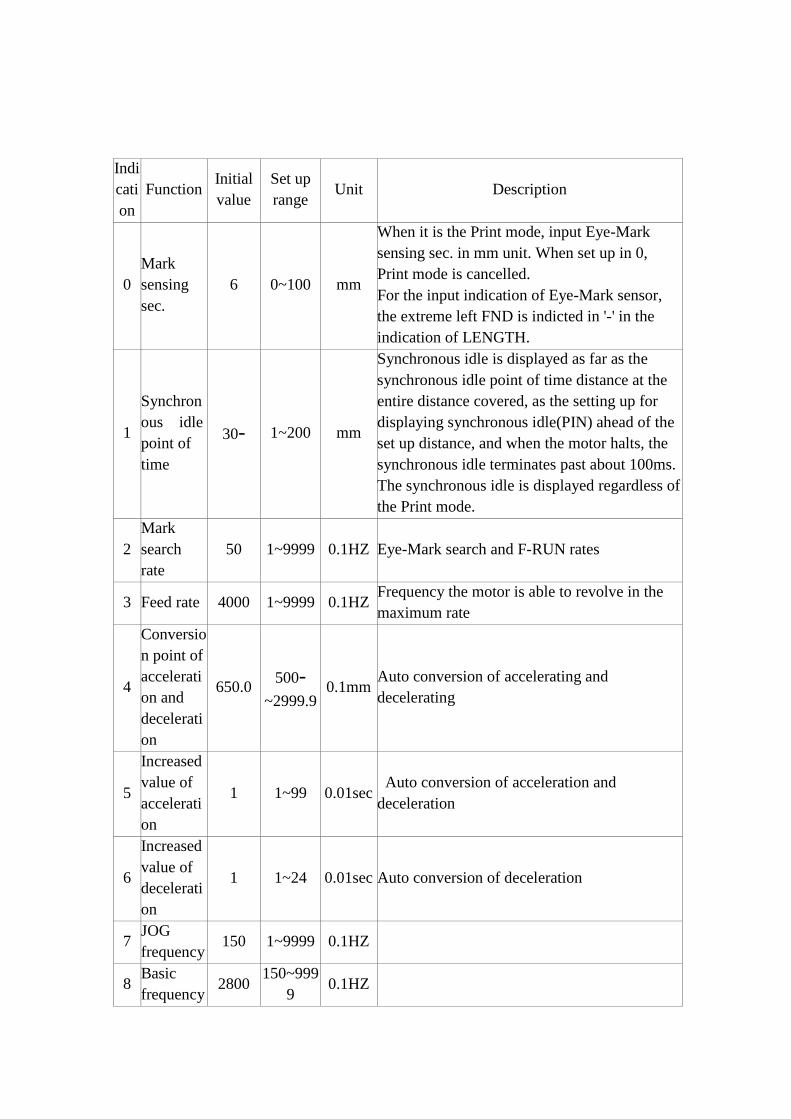
Indi
cati
on Function
Initial
value Set up
range Unit Description
0 Mark
sensing
sec. 6 0~100 mm
When it is the Print mode, input Eye-Mark
sensing sec. in mm unit. When set up in 0,
Print mode is cancelled. For the input indication of Eye-Mark sensor,
the extreme left FND is indicted in '-' in the
indication of LENGTH.
1
Synchron
ous idle
point of
time
30- 1~200 mm
Synchronous idle is displayed as far as the
synchronous idle point of time distance at the
entire distance covered, as the setting up for
displaying synchronous idle(PIN) ahead of the
set up distance, and when the motor halts, the
synchronous idle terminates past about 100ms. The synchronous idle is displayed regardless of
the Print mode.
2 Mark
search
rate 50 1~9999 0.1HZ Eye-Mark search and F-RUN rates
3 Feed rate 4000 1~9999 0.1HZ Frequency the motor is able to revolve in the
maximum rate
4
Conversio
n point of
accelerati
on and
decelerati
on
650.0 500-~2999.9
0.1mm Auto conversion of accelerating and
decelerating
5
Increased
value of
accelerati
on
1 1~99 0.01sec Auto conversion of acceleration and
deceleration
6
Increased
value of
decelerati
on
1 1~24 0.01sec Auto conversion of deceleration
7 JOG
frequency 150 1~9999 0.1HZ
8 Basic
frequency 2800
150~999
9 0.1HZ
p6
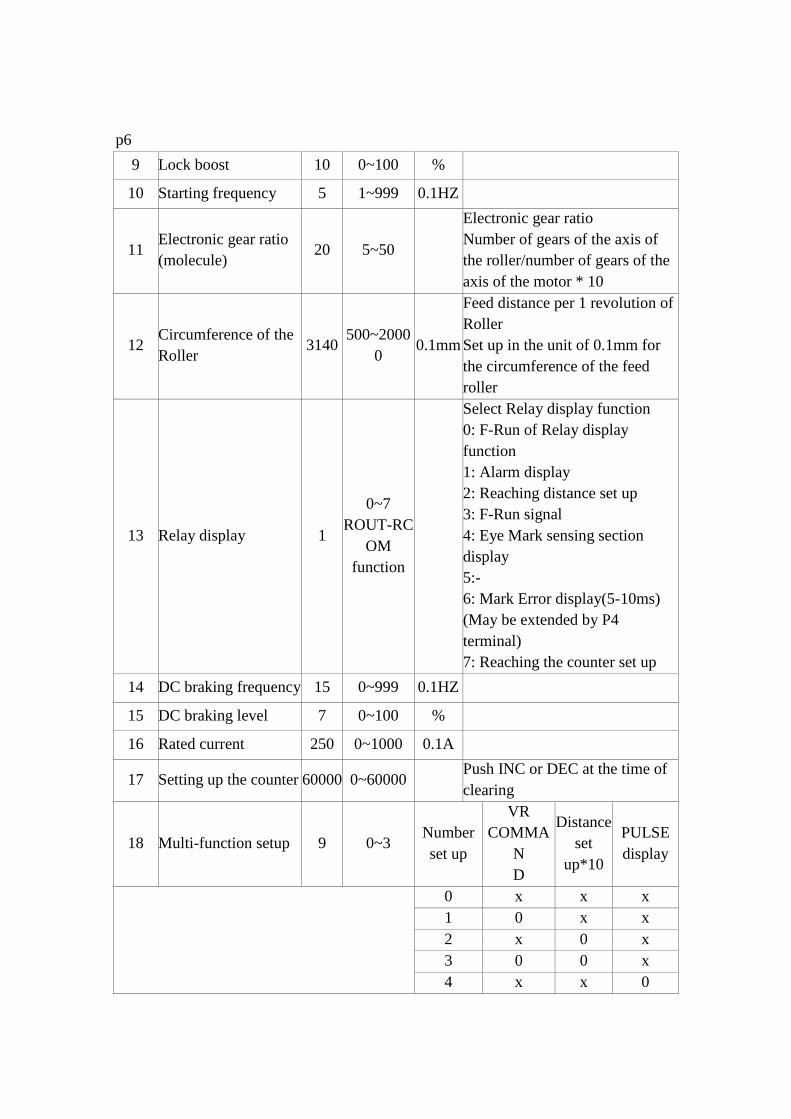
9 Lock boost 10 0~100 %
10 Starting frequency 5 1~999 0.1HZ
11 Electronic gear ratio (molecule)
20 5~50
Electronic gear ratio Number of gears of the axis of
the roller/number of gears of the
axis of the motor * 10
12 Circumference of the
Roller 3140
500~2000
0 0.1mm
Feed distance per 1 revolution of
Roller Set up in the unit of 0.1mm for
the circumference of the feed
roller
13 Relay display 1
0~7 ROUT-RC
OM
function
Select Relay display function 0: F-Run of Relay display
function 1: Alarm display 2: Reaching distance set up 3: F-Run signal 4: Eye Mark sensing section
display 5:- 6: Mark Error display(5-10ms) (May be extended by P4
terminal) 7: Reaching the counter set up
14 DC braking frequency 15 0~999 0.1HZ
15 DC braking level 7 0~100 %
16 Rated current 250 0~1000 0.1A
17 Setting up the counter 60000 0~60000 Push INC or DEC at the time of
clearing
18 Multi-function setup 9 0~3 Number
set up
VR COMMA
N D
Distance
set
up*10
PULSE
display
0 x x x 1 0 x x 2 x 0 x 3 0 0 x 4 x x 0
p7 3. Input/output
‧ END+, END- display: Stop signal or 2.5HZ Duty Cycle ‧ PIN+, PIN- display: Synchronous idle(refer to Data mode No 1) or Mark sensing section display(becomes OFF past about 100ms after the completion of the motor
operation) ‧ F-JOG, -24V: Feeding F direction JOG ‧ R-JOG, -24V: Feeding R direction JOG
4. EYE MARK function description
1) EYE-MARK function is the move for feeding to the correct location applying
available print sensor. When the print sensor signal is input, it halts starting deceleration immediately. 2) EYE-MARK sensor signal is input into the INT(INT, -24V) terminal.(NPN time
sensor) 3) In case the EYE-MARK sensing section (Data mode No 0) is set up as 0, EYE-
MARK sensing function shall not operate. 4) Senses the sensor signal only within the sensing section, and decelerates and halts. 5) In case EYE-MARK is not input as far as EYE-MARK sensing section is passed,
MARK ERROR is displayed, and it displays buzzer control sound into the external
terminal. (ROUT. RCOM). (6) Use the Mark sensor by connecting it to the No 5(NINT), No 6(INT), and No
1(+24V).
Ex) In case when the distance set up is set up in 1000mm(1000,0) and when EYE-
MARK sensing section is set up in 6, the real EYE-MARK sensing section becomes
1000mm-1006mm. (Sensing range 6mm)
5. Synchronous idle 1) When trying to operate it linked to the other instruments, it is the function displaying
the signal just prior to the halt of the motor. 2) The starting point in which the synchronous idle is displayed may be set up
beforehand (Data mode No1), and when the motor stops, the synchronous idle becomes
OFF after about 100msec.
6. Change of feed rate
1) May set up the maximum rate(Data mode No 3).
2) Use the accelerating and decelerating rates adjusting them pushing the rate
S/W(Speed).(For deceleration, adjust the roller rate to the degree of 6-15A adding and
reducing the accelerating time after fixing ex. about 6-15d as the adequate value.)
7. Feed JOG 1) Terminal band No 8, -24V: F-JOG. Terminal band No 9. -24V: R-JOG 1) In case one pushes 'R' or 'F' when the motor halted, it feeds into the JOG rate set
up(Data mode No 7). 2) While the motor is JOG operating, it becomes only JOG operating even if the
terminal STR is input, and only when it is not JOG operating, it is operated by No 19
STR. (Also, when it is being operated by STR, JOG shall not operate.)
8. Work Counter
1) Counter RESET: In case one pushes INC or DEC keys at the state of work counter
indication out of indication type selection(at the state after pushing rate S/W for 2
seconds), the present work counter shall be cleared as 0. The present work counter shall
be cleared as 0 when the power is OFF. Work Counter
2) Setting up work counter In case the work counter increases and reaches the counter set up(setting up the work
counter), the output of the Relay becomes ON, and when the next work starts, the
counter shall be Reset as 0. (When the data mode No 13 is 7). (Be sure to do Counter Clearing after setting up) In case the Data mode No 17 is set up as 0, the work counter Reset function halts.
9. The method of using PULSE output of multi-function setting up
When FC-5000 Controller is tested without connecting it to the machine, one may test
the continuous operation by generating the motor starting input or EYE-MARK input
PULSES. In case the optional digit is input into the Data mode No 18(multi-function setting up)
among 0~4, continuous PULSE output generates in the width of 200mS at the END
output.(2.5Hz Duty Cycle) In case No 17 and -24V, NO 16 and No 19(STR) in the terminal are connected, the
repetitive operation shall be possible even if the motor starting signal is not input.
C 0
10. Indication mode state(shows only at the state of LENGTH indication) ‧ In case S/W of LENGTH is pushed for 2 seconds, it becomes indication mode, and at
this time in case S/W of LENGTH is pushed for the moment, the indication type shall
be changed. At this time when operating, it becomes normal operation continuously.
‧ In order to cancel the indication mode, it shall be cancelled by pushing S/W of the
SPEED(rate).
Indicates the work frequency in the frequency per
minute (Unit rpm)
Indicates the feed frequency in the distance set up (Unit: times)
Indicates the present real location after being
fed to the distance set up. (Unit: mm)
Indicates the frequency of the motor revolution.
(Unit: Hz)
11. Past alarm indication and obliteration
1) In case one pushes the print S/W and the power is put in, shows and it becomes the past alarm indication mode.
2) In case one pushes 'F-Run' again, the past alarms show in order from the latest
alarms.
0. C. S
3) At this time, in case one pushes 'LENGTH' at the state where one pushes 'F-Run,' the
past alarms shall all be obliterated. (4 are obliterated)
4) In case one pushes 'print,' the past alarm indication mode terminates and becomes the
operation state of applied equipments.
d 1 0 0. 0
12. Alarm indication
1) r . 0 Work RPM
2) c . 0 Work counter
3) L . 0 Present location
4) F 1. 5 Present frequency
E r r. d
0. - -
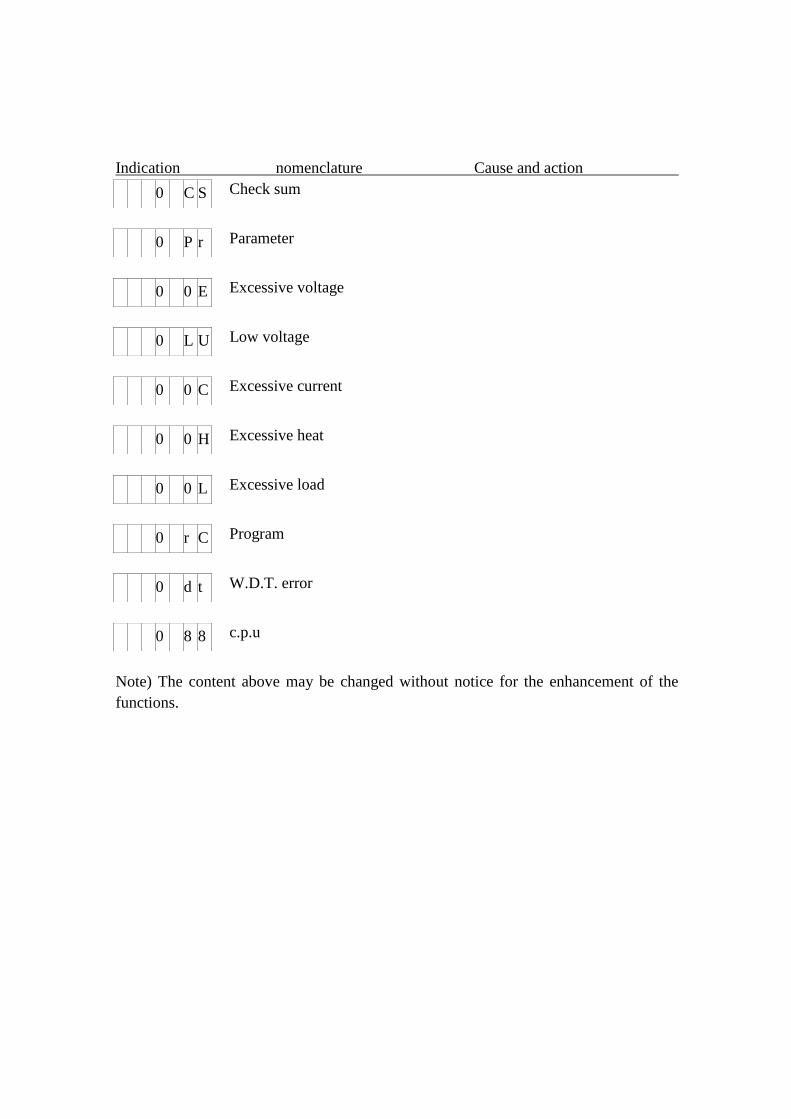
Indication nomenclature Cause and action
Check sum
Parameter
Excessive voltage
Low voltage
Excessive current
Excessive heat
Excessive load
Program
W.D.T. error
c.p.u
Note) The content above may be changed without notice for the enhancement of the
functions.
0 C S
0 P r
0 0 E
0 L U
0 0 C
0 0 H
0 0 L
0 r C
0 d t
0 8 8