curso de motores_electricos parte2
TRANSCRIPT

CURSO DE SELECCIÓN DE MOTORES
ELECTRICOS
CONTROL DE MOTORES UTL(SEGUNDA – PARTE)
ENERO 2014
MA e Ing. Juan Humberto Saldaña Rea

TEMARIO
• I. OBJETIVO
• II. CLASIFICACION
• 1. Potencia y corriente
• 2. Tipo de servicio y factor de servicio
• 3. Clases de aislamiento y temperatura
• 4. Temperatura y altitud
• 5. Limites de temperatura
• 6. Altitud
• 7. Velocidad
• 8. Deslizamiento
• 9. Eficiencia
• 10. Letra de código
• 11. Factor de potencia
• 12. Tamaño carcasa
• 13. Tipos de motores
TEMARIO
• 14. Curvas par velocidad motor
• 15. Curvas par velocidad cargas
• 16. Métodos de acoplamiento
• III. EJEMPLOS
• ANEXOS
I. OBJETIVO
• El objetivo de este curso es el de proporcionar las bases y lineamientos, así como algunos conceptos y factores
que sirvan para hacer una selección adecuada, de motores eléctricos de inducción J.A , así como también de los
equipos controladores correspondientes.
• La selección mencionada anteriormente esta dirigida estrictamente a la aplicación del motor como maquina motriz
y NO a su diseño.
• La selección de motores se hará en casos generales, pero para problemas específicos debe consultarse al
fabricante.
• DEFINICION: Los motores eléctricos transforman energía eléctrica en energía mecánica y por lo tanto su
aplicación esta definida por las características que imponen los requerimientos de la carga mecánica.
• SU DISEÑO , CONSTRUCCION y SELECCIÓN DE PROTECCIONES Y CONTROLES:
• NEMA
• IEC
• IEEE
• NOM-001-SEDE-2005 (ART. 430)

II. CLASIFICACION
• LOS MOTORES ELECTRICOS EN GENERAL ESTAN CLASIFICADOS:
• 1. CUALIDADES ELECTRICAS
• 2. CUALIDADES MECANICAS
• 3. PLACA DE DATOS
• 5. ESPECIFICACIONES e INFORMACION TECNICA DEL PROVEEDOR
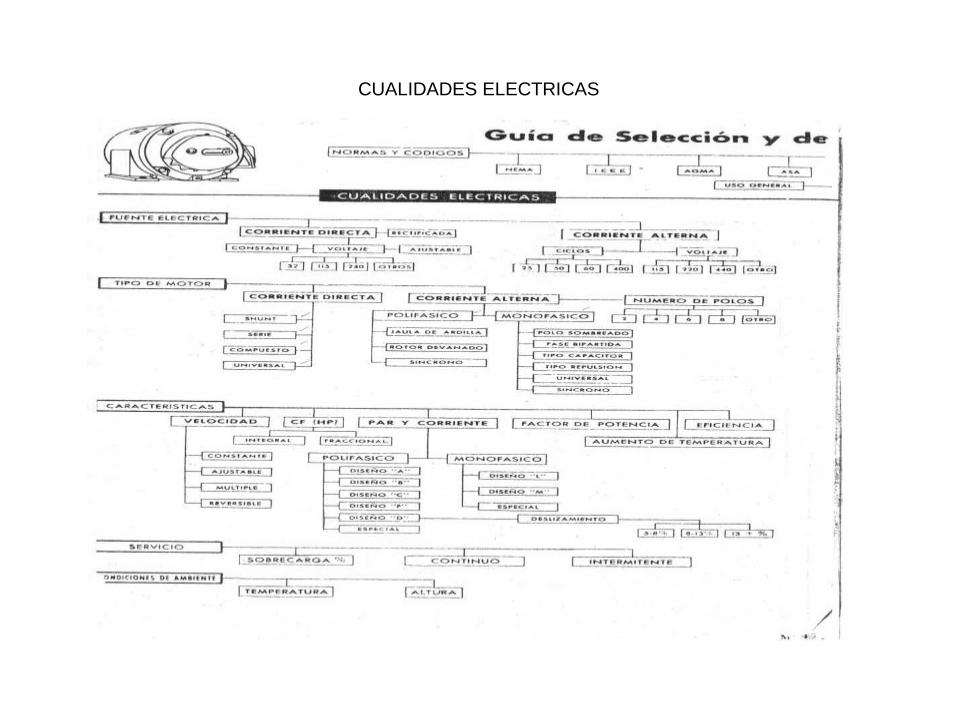
CUALIDADES ELECTRICAS

CUALIDADES MECANICAS
PLACA DE DATOS
• Una placa de datos del motor nos da información importante sobre las características del mismo como:
• 1. Tamaño de su armazón (FRAME)
• 2. Tipo de carcasa (ENCLOSURE)
• 3. Clase de diseño (NEMA) o PAR
• 4. R.P.M
• 5. Letra de código corriente a rotor bloqueado
• 6. Corriente a plena carga o nominal
• 7. Factor de servicio (F.S)
• 8. Numero de fases y voltaje, conexiones
• 9. Clase de aislamiento(DEVANADOS)
• 10. Factor de potencia a plena carga
• 11. Eficiencia
• ETC.
• NOTA: Cada uno de estos parámetros se combina con todos los demás para producir un resultado total. Por lo
que se tiene que analizar cada uno de ellos e interpretarlos, para lograr una aplicación correcta de los motores

PLACA DE DATOS DEL MOTOR

LETRAS EN PLACA DE DATOS
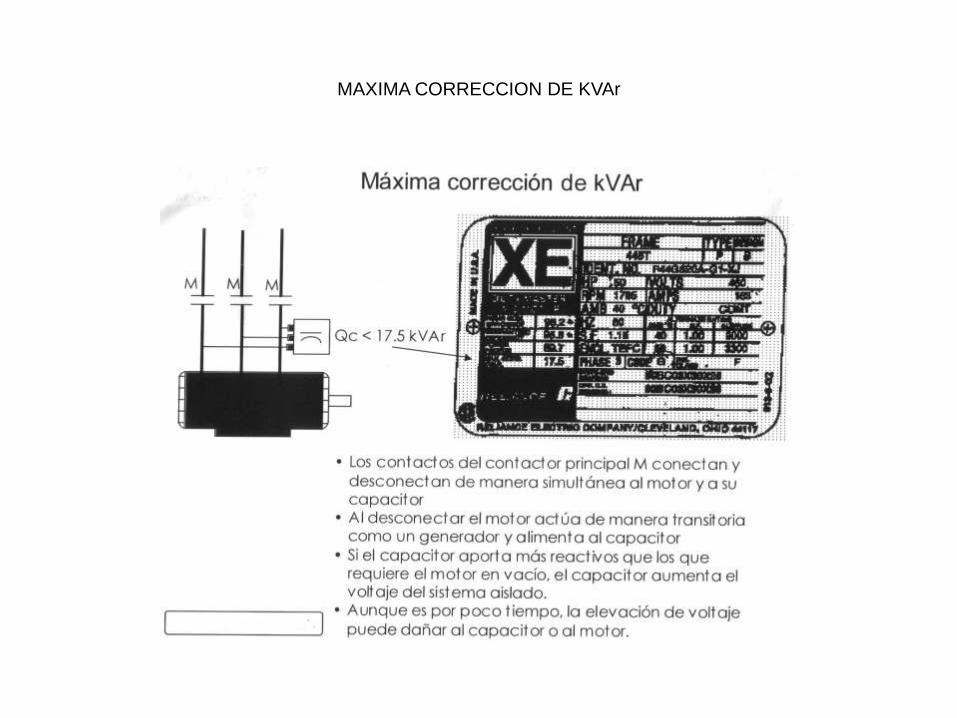
MAXIMA CORRECCION DE KVAr

1. POTENCIA Y CORRIENTE
POTENCIA Y CORRIENTE:
a) POTENCIA (Cp. o Hp)
Los valores de potencia de cada motor están referidos a la flecha del mismo, o carga a mover (BHP) es muy
importante que cuando se tengan motores de varias velocidades que se defina en cada caso la potencia para los
diferentes tipos de carga.
b) CORRIENTE
Corriente nominal = La corriente nominal de un motor depende de la eficiencia con que haya sido diseñado, o sea
que puede variar de un fabricante a otro; como consecuencia este dato debe ser suministrado por el fabricante ;
la NOM. ART. 430 da los valores máximos permitidos para motores.
Corriente de arranque = Este valor depende de la letra de código o letra clave del motor; considerando que este
depende también del diseño del motor, y deberá ser suministrado por el fabricante.
La letra clave seleccionada ´por el fabricante para un motor nos indica los KVA que el motor toma de la línea por
cada CP en el momento del arranque (se denomina a rotor bloqueado); estos valores deben estar referidos a la
tensión y frecuencia nominales.
2. TIPO DE SERVICIO Y FACTOR DE SERVICIO
• TIPOS DE SERVICIO Y FACTOR DE SERVICIO:
• La mayoría de los motores están clasificados para servicio CONTINUO, lo que significa que pueden funcionar
continuamente con un PAR de plena carga sin experimentar recalentamientos.
• Hay motores que se utilizan en ciertas aplicaciones como: actuadores de válvulas, grúas y otros tipos de cargas
INTERMITENTES, estos motores son frecuentemente clasificados para servicio de corta duración, como 5 , 15,
30. o una hora. O sea son motores que pueden realizar trabajo muy duro siempre que no sea en forma continua.
• FACTOR DE SERVICIO
• El factor de servicio es un factor de seguridad
• Los factores de servicio mas comunes en los motores jaula de ardilla son de 1.0 y 1.15
• Un factor de servicio de 1.15 indica que el motor es capaz de entregar Hp nominales x 1.15 de manera continua
bajo condiciones usuales de servicio sin que el aumento de temperatura exceda su valor máximo permisible de
acuerdo a la clasificación NEMA de aislamientos.
• En otras palabras es un multiplicador que indica la cantidad esperada de sobrecarga que puede manejar un
motor. Por ejemplo: Así un motor de 10 HP. Con F.S=1.15 puede manejar cargas de 11.5 HP.
• Nota: El factor de servicio NO deberá utilizarse en los cálculos de carga básica del motor; solo en algunos casos
se puede utilizar como ajuste para la selección de un motor , como se vera mas adelante.
3. CLASES DE AISLAMIENTO Y TEMPERATURA
• CLASES DE AISLAMIENTOS Y TEMPERATURAS
• Las partes eléctricas de los motores deben de estar aisladas contra el contacto con otros conductores y con la
sección magnética del motor.
•
• El sistema de aislamiento incluye el barniz que recubre el alambre en los devanados, así como los forros de las
ranuras del estator. El sistema de aislamiento incluye también las cintas, revestimientos, amarres, etc.
• Las cuatro grandes clasificaciones del aislamiento aplicables a los motores son, en orden de menor a mayor
capacidad térmica: A, B, F y H.
• Las capacidades de temperatura de estas clases están separadas entre si por incrementos de 25ºC. (A=105ºC,
B=130ºC,F=155ºC, H=180ºC) que es la temperatura max. Del punto mas caliente.

4. TEMPERATURA Y ALTITUD
• TEMPERATURA Y ALTITUD
• La temperatura y el medio ambiente son factores que influyen en la operación de un motor y/o cualquier otro equipo eléctrico.
• La temperatura ambiente: Es la temperatura del aire que rodea al motor (40º) o la del lugar en donde esta el motor; o sea que
es la temperatura que toma el motor cuando esta apagado y frio.
• Temperatura máxima: La temperatura a la que debe operar como máximo un motor; se obtiene sumando la temperatura
ambiente MAS la propia de operación, quedando LIMITADA a la clase de aislamiento del devanado con que esta construido el
MOTOR.
• Por ejemplo: un motor con un incremento por temperatura de 60ºC. Sobre su temperatura ambiente de 40ºC, se obtiene una
temperatura media total de 40ºC + 60ºC = 100ºC. Esto implica utilizar un motor CLASE – A.
• Como puede observarse estos motores se diseñan para una temperatura Max de 105ºC. Por lo que: (105 – 100=5ºC . esta
diferencia de 5ºC. Es su margen de seguridad.(ver figura)
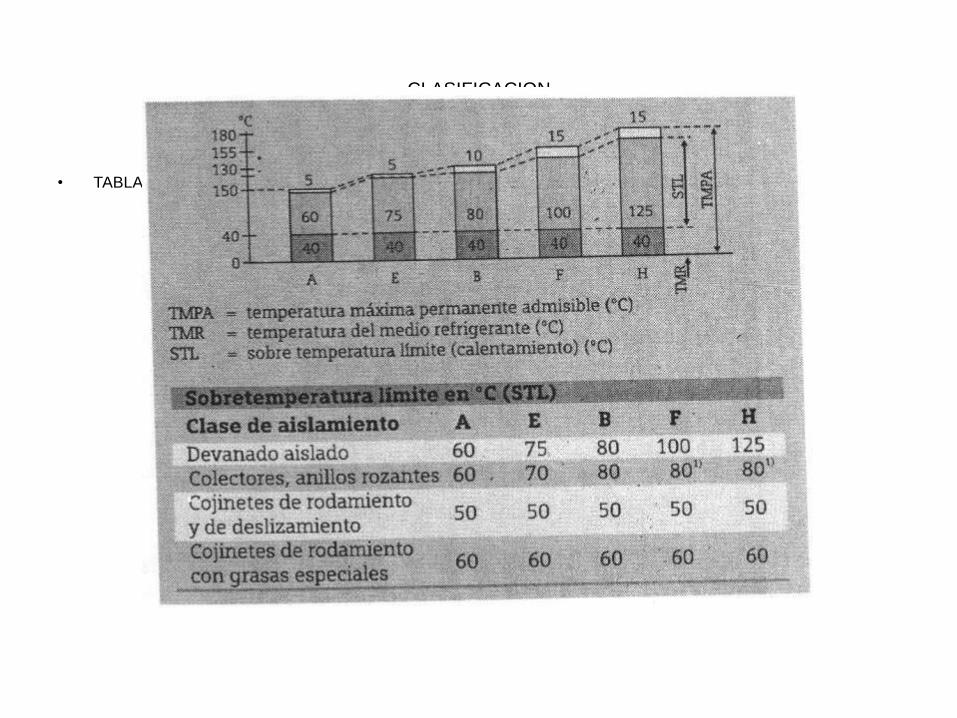
CLASIFICACION
• TABLA

5. LIMITES DE TEMPERATURA
• LIMITES DE TEMPERATURA
• Por cada 10ºC de operación continua por arriba (por debajo) de la temperatura máxima del punto mas caliente, la
vida del motor se reduce a la mitad (o se duplica).
• También esta el otro caso de que si un motor CLASE B se lo fabrica con aislamientos CLASE F. Es posible
generalmente incrementar su factor de servicio F.S de 1.0 a 1.15. Este mismo cambio de clase de aislamiento
puede usarse para soportar una temperatura ambiente mas alta o para aumentar la vida del motor.
• INCREMENTO DE TEMPERATURA POR EL METODO DE RESISTENCIA
• Incremento en ºC= Rh – Rc / Rc (234.5 + T)
• Rc= Resistencia en frio del devanado (ohms)
• Rh= Resistencia en caliente del devanado (ohms)
• T= Aumento de temperatura en en ºc.
• Ejemplo: Un motor pequeño tiene una resistencia en frio de 3.2 ohm a una temperatura ambiente de 40ºc.. Luego
de operar a plena carga durante varias horas, la resistencia mide 4.1 ohms y la temperatura ambiente ha subido a
43ºC.
• Incremento ºc = 4.1 – 3.2/ 3.2 (234.4 + 43) = 78ºC. Corrigiendo por el aumento de 3ºC en la
temperatura ambiente: INCREMENTO EFECTIVO= 78 – 3 = 75ºC
• LO QUE IMPLICARIA UTILIZAR UN MOTOR «CLASE-A»

6. ALTITUD
• ALTITUD
• Por norma la altura de operación debe de considerarse hasta 1000 msnm. Para aquellos motores que vayan a
utilizarse en altitudes superiores se deben tener las siguientes consideraciones: (NEMA. MG1)
• altura sobre el nivel del mar:
• Es factor que es uno de los principales problemas en México debido a su topografía, afecta el aumento de
temperatura en los aislamientos. Al reducirse la densidad del aire con la altura, disminuye su capacidad
refrigerante y la disipación del calor crece. Pero se tiene la ventaja que generalmente la temperatura ambiente
decrece al aumentar la altura sobre el nivel del mar.
• Altura (m.s.n.m) temp.ambiente (ºc)
• 1000 40
• 1500 38
• 2000 35
• 2500 33
• 3000 30
• 3500 28
• 4000 25
• EJEMPLO: Tomando los datos del ejemplo anterior, pero ahora; para una altitud de 2000 msnm (leon, gto). Esto
implica tomar una temperatura ambiente de 35ºc.
• Incremento ºc = 4.1 – 3.2/ 3.2 (234.4 + 43) = 78ºC. Corrigiendo por el aumento de 8ºC en la
temperatura ambiente: INCREMENTO EFECTIVO= 78 – 8 = 70ºC
7. VELOCIDAD
VELOCIDAD DE PLENA CARGA = Es la velocidad aproximada a la que funciona el motor cuando estaproduciendo el PAR o la potencia Hp a plena carga.
• VELOCIDAD SINCRONA = La velocidad con que gira el campo magnético de cualquier motor de C.A dependede la frecuencia de la corriente que los alimenta y del numero de polos del devanado del estator.
• Esta velocidad es llamada velocidad de sincronismo y puede hallarse por la siguiente expresión:
• S = 120 x f / p
• S = velocidad de sincronismo r.p.m
• F = frecuencia
• P = numero de polos del motor
• 120 = se emplea la constante de 120 porque un polo del rotor tiene que pasar delante de un par de polos delestator durante cada periodo.
• `polos Sinc desl Nom
• 2 3600 4.16 3450
• 4 1800 1725
• 6 1200 3.3 1160
• 8 900 4.4 860
•

VELOCIDAD
• CONTROLADORES Y VELOCIDADES DE MOTORES
• 1. MOTORES DE VELOCIDAD CONSTANTE
• Los motores de velocidad constante operan prácticamente sin variaciones en su velocidad; con carga normal y en
una gama amplia de pares, tales como: transportadores, maquinas de papel, bombas hidráulicas, etc.
• 2. MOTORES DE VELOCIDAD AJUSTABLE Y VARIABLE
• Motor al cual se le puede ajustar su velocidad gradualmente y que una ves ajustada esta varia ampliamente con
los cambios de carga (bombas o ventiladores centrífugos)
• 3. MOTORES DE VARIAS VELOCIDADES
• Motores que operan a dos o mas velocidades (motores J.A con uno o dos devanados y con las terminales
dispuestas para poderse conectar exteriormente en distinto numero de polos) 3,6,9 puntas. Conexiones delta ,
estrella, 2 delta, 2 estrella.
8. DESLIZAMIENTO
• DESLIZAMIENTO
• Los motores de inducción de C.A, no marchan nunca exactamente a la velocidad de sincronismo, ya que sus
rotores tienen que girar siempre con una velocidad ligeramente inferior a la del campo magnético rotativo para
que las líneas de fuerza corten a los conductores del rotor e induzcan en ellos la corriente necesaria.
• Esta diferencia entre la velocidad real de marcha de los motores de inducción y la velocidad de sus campos
magnéticos se llama DESLIZAMIENTO. El deslizamiento se expresa por lo general en % de la velocidad del
sincronismo.
• Por ejemplo:
• Un motor de inducción de 6 polos tendrá una velocidad de sincronismo de 1200 rpm. Pero su velocidad real a
plena carga es solo de 1140 rpm. El cual tendrá un deslizamiento:
• d = 1200 – 1140 / 1200 x 100 = 5 %
• El deslizamiento de un motor variara según la carga; en los motores de inducción el deslizamiento puede variar
del 2 al 5 %.
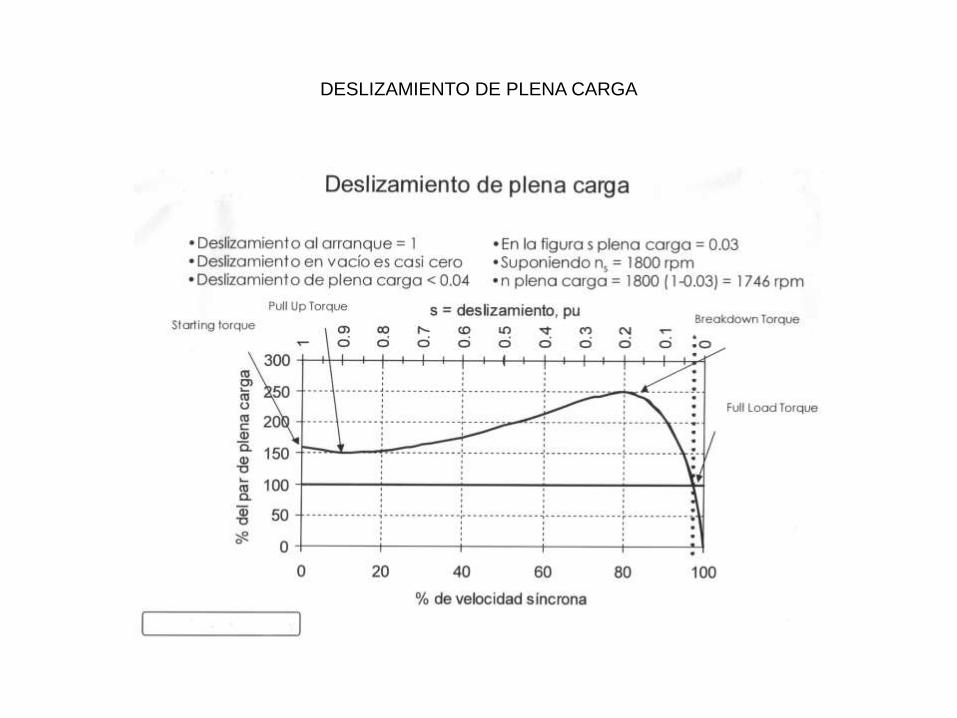
DESLIZAMIENTO DE PLENA CARGA

9. EFICIENCIA
• EFICIENCIA
• La eficiencia o rendimiento es el % de la potencia de entrada que es efectivamente convertida en trabajo en el eje
del motor. El valor de la eficiencia esta por lo general indicado en la placa de datos del motor.
P es la potencia de entrada (watts)……………..motor conectado a la línea
• Hp ……………………………………es la potencia mecánica de salida del motor (flecha)
• Ploss……………………………..son las perdidas del motor (watts)
• a) perdidas en el núcleo estator y rotor
• b) perdidas en el cobre del estator y rotor
• c) perdidas por fricción y ventilación
• ´
• e = p – ploss / p x 100
• La eficiencia de un motor de C.A cualquiera es siempre mayor cuando el motor trabaja a plena carga o cerca de
ella, y baja mucho cuando el motor funciona solo ligeramente cargado. Su rendimiento varia según la
construcción del motor y también según su tamaño. El rendimiento de los motores de inducción ordinarios varia
por lo general entre 78 a 90%.
10. LETRA DE CODIGO
• LETRA DE CODIGO
• La letra de código indica la cantidad de corriente con rotor bloqueado o corriente de arranque que demanda el
motor al arrancar.
• Cuando un motor de C.A arranca a pleno voltaje, el motor consume un amperaje de línea 300 a 600%. De su
corriente nominal.
• La magnitud de la corriente de arranque o corriente a rotor bloqueado; esta determinada por la potencia del motor
Hp. Y las características de diseño del motor (letra de código)
• La letra de código corresponde con un rango de KVA de rotor bloqueado por cada Hp nominal.
• Letra de código Rango en KVA/Hp
• A………………………………0.00 – 3.15
• C………………………………3.15 – 4.00
• E ………………………………4.50 – 5.00
• G ………………………………5.60 – 6.30 …………… ETC
• Ejemplo: Motor de 50 Hp, 460 v, con letra de código «G» …………………va de 5.60 a 6.30 KVA/Hp
• Por lo tanto los KVA r.b = 50 x 6.30 = 315
• Por lo tanto la corriente de arranque o de rotor bloqueado = 315 / 1.73 x 0.460 = 395.4 A (600%), lo que nos
permite seleccionar la capacidad Max. De su dispositivo de protección y controladores.

11. FACTOR DE POTENCIA Y CORRECCION DE KVAr
• FACTOR DE POTENCIA
• El factor de potencia (F.P) se puede definir como la relación entre la potencia activa (kw) y la potencia aparente
(kva) y es el indicativo de la eficiencia con que esta utilizando la energía eléctrica para producir un trabajo.
• Como sabemos el origen del bajo F.P son las cargas de naturaleza inductiva, principalmente los motores de
inducción.
• De lo anterior podemos hacer una división ya que en el arranque intervienen:
• a. como cargas lineales (motores)
b. como cargas no lineales (variadores de velocidad, arrancadores electrónicos y en general equipos
que contengan electrónica de potencia)
• Muchos motores indican en su placa de datos el valor de F.P y KVAr. Requeridos para mejorar su F.P.
• Pero se recomienda : hacer un estudio para la posible ubicación de condensadores ya que de ello depende
obtener una compensación individual o por grupo.
• Del valor de F.P depende también las características de los motor tanto eléctricas; como mecánicas (devanados,
fuente de alimentación, disipación de calor, tamaño, etc)
FACTOR DE POTENCIA
• EJEMPLO:
• Para establecer la diferencia supongamos un motor de 2000 CP., 2200V, 3 FASES, 60HZ. con un F.P = 0.8.
• Los 2000 cp que es la potencia activa, en kw serán: = 2000 X 0.746 = 1492 kw
• Para F.P de 0.8 tendremos
• Kva = kw / cos = 1492 / 0.8 = 1865 kva
• Del triangulo de potencias: cos 0.8 = 36.9º
• Sen = 0.60
• Sen = kvar / kva
• Kvar = kva x sen
• Kvar = 1865 x 0.6 = 1119 kvar ( valor del capacitor requerido)
•

12. TAMAÑO DE LA CARCASA DEL MOTOR
(FRAME)
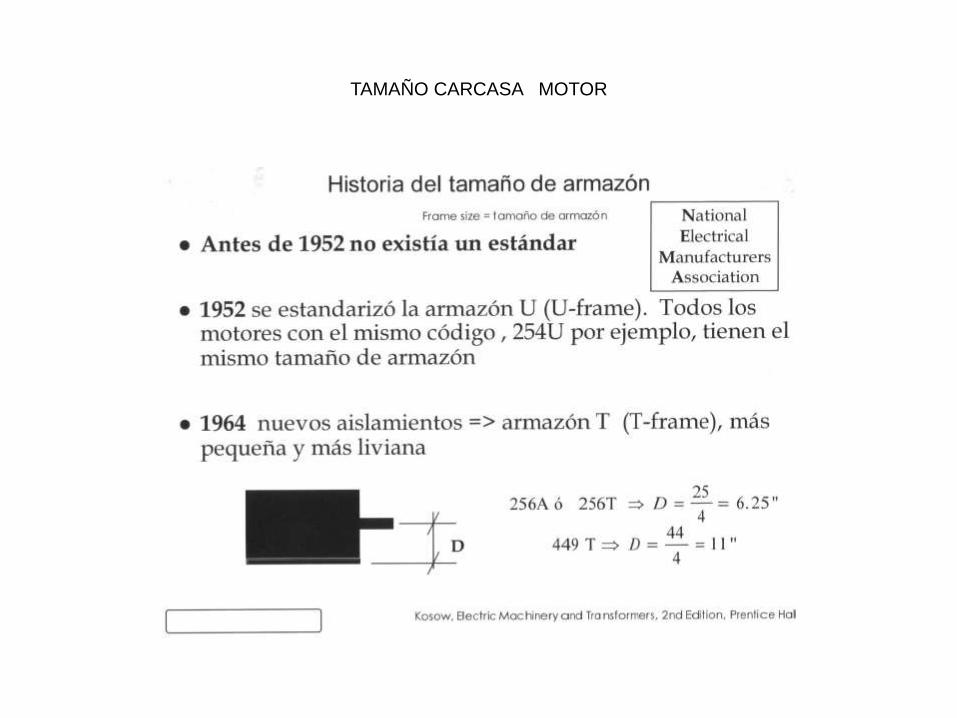
• CARCASA: Los motores eléctricos industriales existen desde hace casi un siglo. Antes de 1952 no existía un
estándar. En 1952 se estandarizo la armazón “U” y todos los motores tenían el mismo CODIGO y el mismo
tamaño de ARMAZON.
• En 1964 la mejora de nuevos aislamientos implico la creación de la armazón “T” mas pequeña y mas liviana.
Como resultado de mejores aislamientos fue posible hacer funcionar los motores a mayores temperaturas: este
incremento en su capacidad térmica hizo posible incorporar mayor caballaje en el mismo tamaño de carcasa. Y
para logar mayor capacidad de potencia mecánica fue necesario aumentar el tamaño de sus ejes, cojinetes, etc
• De aquí se tienen motores:
• POTENCIA FRACCIONARIA: Que se usa para aquellos tamaños de carcasa con designación de 2 dígitos, los
tamaños de carcasa de estos motores son 42, 48 y 56. Que indican el tamaño de la carcasa , altura del eje,
diámetro del eje y disposición de los agujeros.
• El numero de 2 dígitos de la carcasas se basa en la altura del eje, en dieciseisavos de pulgada.
• EJEMPLO:
• Un motor con carcasa 48 tiene una altura de eje de 48 dividido por 16 o sea 3 pulgadas.
• POTENCIA INTEGRAL: Se refiere a los motores con carcasa de 3 dígitos como 143T o mayor. Hay una regla
practica para estos tamaños de carcasa; que la altura longitudinal al eje “D” es igual a los 2 primeros dígitos
dividido por 4.
• EJEMPLO:
• Una carcasa 254T tiene una altura de eje D= 25 /4 = 6.25” ………….. La 449T implica D=44/4 11”
TAMAÑO CARCASA MOTOR

TAMAÑO DE LA CARCASA DEL MOTOR

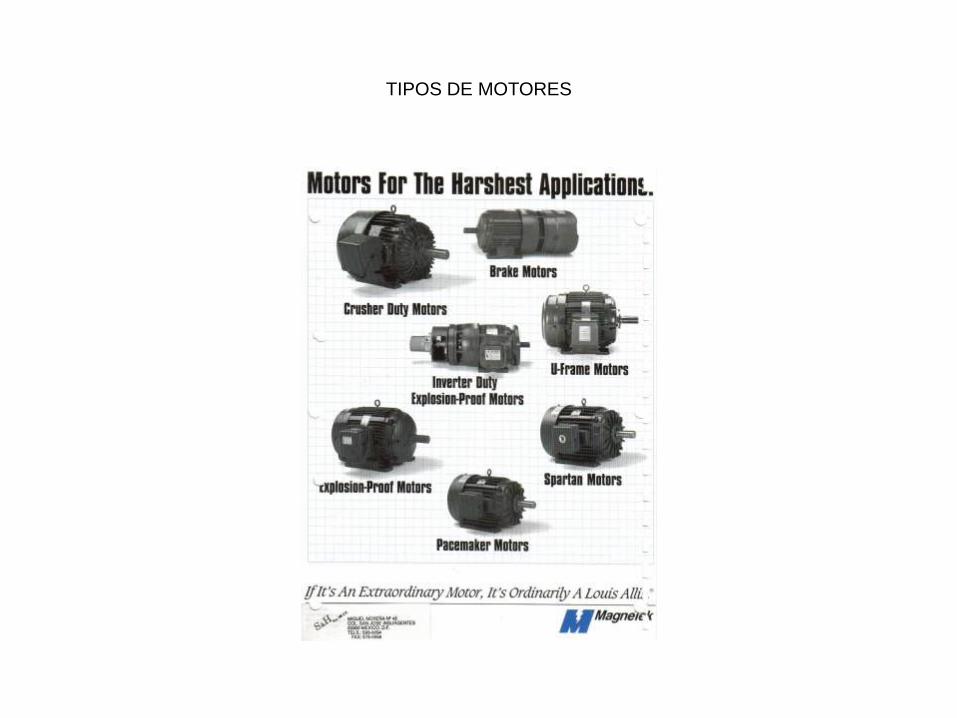
13. TIPOS DE MOTORES
• La clasificación de los motores eléctricos esta de acuerdo a su construcción mecánica los tenemos en los
siguientes tipos:
• 1. Abierto
• 2. Semi protegido
• 3. Abierto a prueba de goteo
• 4. A prueba de agua
• 5.Totalmente cerrado enfriado por ventilador (TEFC)
• 6. Totalmente cerrado sin ventilación externa (TENV)
• 7. Para sitios peligrosos
TIPOS DE MOTORES

14. CURVAS PAR-VELOCIDAD
• CONCEPTOS DEL PAR
• DEFINICION: Los motores eléctricos transforman energía eléctrica en energía mecánica y por lo tanto su
aplicación esta definida por las características que imponen los requerimientos de la carga mecánica.
• En el proceso de aplicación de equipos de accionamiento industrial, a veces se cree INCORRECTAMENTE que lo
que se aplica a la carga es potencia o sea caballos de fuerza. La verdadera fuerza de accionamiento NO es la
potencia sino el PAR.
• El par es la fuerza de torsión que un motor proporciona a la carga. En la mayoría de las aplicaciones, se debe
aplicar una cantidad substancial del PAR al EJE accionado de la carga antes que esta pueda siquiera comenzar a
girar.
• VARIACIONES DE VOLTAJE
• Cuando los motores eléctricos son sometidos a voltajes inferiores al nominal, algunas de sus características van
alterarse levemente y otras cambiaran en forma mas notable. Como sabemos para accionar una carga mecánica
fija conectada al eje, el motor debe tomar una cantidad fija de energía de la línea eléctrica. Como el PAR de
arranque, el par mínimo de aceleración y el par de desenganche en los motores de inducción varia en función al
cuadrado del voltaje que se aplica. Entonces, una baja del 10% en el voltaje nominal reducirá esos pares.
Ocasionando altas corrientes y recalentamientos, lo que a su ves acorta la vida útil del motor. Y en lo que
respecta al alto voltaje este tiende a producir SATURACION en el núcleo del motor. Ocasionando que el motor
consuma excesiva corriente amentando así su calentamiento y reduciendo su vida.
PAR – VELOCIDAD
(SELECCIÓN - MOTOR)
• CURVAS PAR VELOCIDAD:
• Uno de los factores más importantes para seleccionar un motor de inducción es conocer su comportamiento y
capacidad de par durante el arranque; es decir de velocidad cero a velocidad nominal.
• a) Una curva par velocidad es aquella que relaciona los valores instantáneos del PAR con las diferentes
velocidades que alcanza el motor.
• b) Estas curvas de PAR-VELOCIDAD se deben de comparar con las correspondientes a las curvas par de la
carga.
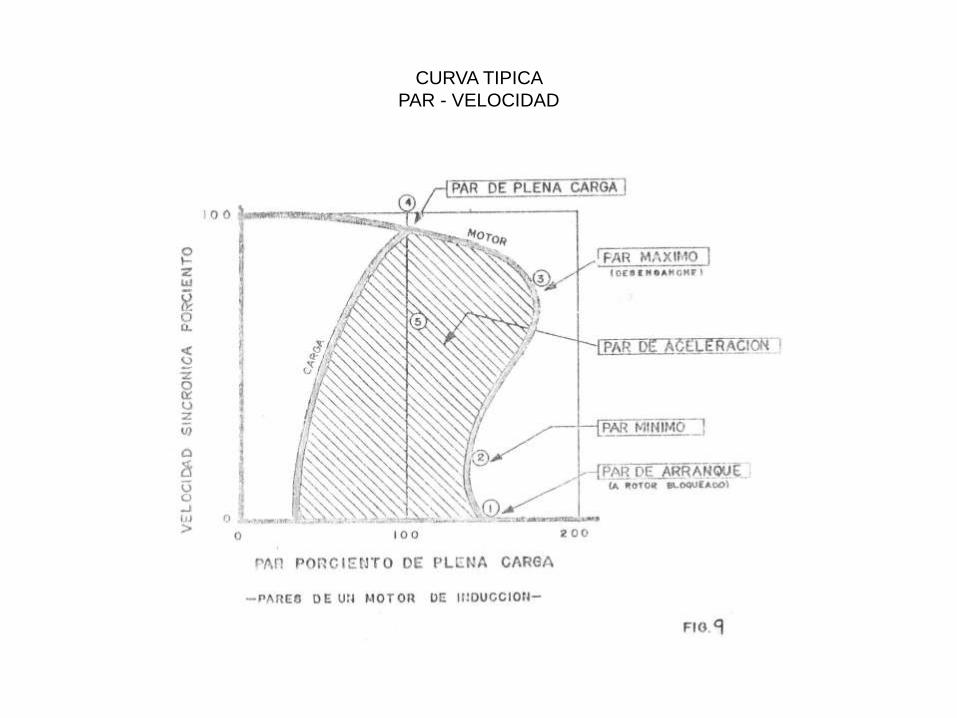
• La curva típica de desempeño del motor de inducción es como la mostrada en la fig. 9. (IEEE std.112-3) en ella se
pueden ver los principales puntos que describen este comportamiento; se ha sobrepuesto una curva de carga
típica. Para efecto de explicación.
CURVA TIPICA
PAR - VELOCIDAD

PAR - VELOCIDAD
• PAR DE ARRANQUE: Es el que desarrolla el motor cuando está en reposo en el momento en el que se le aplicaenergía eléctrica a sus devanados y la flecha empieza a girar. La curva en “1” muestra este par a velocidadcero. También se le llama par a rotor bloqueado.
• PAR MINIMO: Se muestra en “2” Este es el par mínimo en el área de la cúspide que sigue al arranque (V=20%)pero como se vera más adelante, en muchos motores no hay este descenso de par, después de arrancar.
• PAR MAXIMO: Al ir aumentando su velocidad el motor puede desarrollar sin frenarse o “sentarse” súbitamente.Este se muestra en el punto “3” y generalmente se desarrolla alrededor del 80% de la velocidad sincrónica o envacío. También se llama par de desenganche.
• PAR A PLENA CARGA: Es aquel que desarrolla el motor para producir la potencia de placa a la velocidadespecificada (vel. Nominal), como se muestra en el punto “4” de la curva.
• PAR DE ACELERACION:
• Al momento que el motor se energiza acelera la carga mecánica que se encuentra acoplada a su flecha, estosolo será posible si el motor es capaz de lograr un PAR electromagnético que permita el desarrollo del contra-PAR mecánico que la carga demanda.
• El área achurada “5” es proporcional a la potencia que desarrollada por el motor para acelerar la carga. Los“pares de aceleración” son la diferencia entre las dos curvas y están dentro de esta misma área
• Se debe considerar que durante este proceso la corriente de arranque estará presente y que tomara valoressuperiores a 6.0 veces el valor de la corriente nominal.
•
•
•
•
PAR - VELOCIDAD
• CURVAS NEMA PARA VARIOS MOTORES (fig.10) :
• Con la finalidad de que estén normalizadas las características de los motores, NEMA e IEC han definido losniveles de corriente y par de arranque así como sus correspondientes tolerancias se encuentran normalizados porlas siguientes normas:
• NEMA MG 1, rev.2004 , IEC 60034-1, 2004. edi. 11. IEC 60034-12, 2002, edit.. 2.
• Diseño NEMA-A: Es un motor con arranque normal y corrientes de arranque normales (%par arranque 130, % parMax. 220).
• Diseño NEMA-B: Es un motor con arranque normal y corriente de arranque restringida, este tipo de diseño esconocido como “motor de uso general”.
• Diseño NEMA-C: Es un motor con arranque elevado y corriente de arranque restringido.
• Diseño NEMA-D: Es un motor con alto par de arranque, en algunas potencias con corrientes de arranquerestringido y el resto libre.
• La fig. 10 muestra las cuatro curvas características de PAR para cada diseño, los valores de par ycorriente de arranque pueden encontrarse en la parte 12. De la NEMA MG 1. (se pueden ver sus aplicaciones enlas hojas anexas)

PAR - VELOCIDAD

PAR-VELOCIDAD
15. CURVAS CARACTERISTICAS
PAR - MAQUINAS
• CURVAS CARACTERISTICAS DE LA CARGA: (fig. 11)
• En general existen tres tipos de requerimientos de “PAR” en las maquinas movidas como se muestra en la fig. 11
• Maquinas “A”- Par variable:
• Como se observa en esta máquina el PAR varía prácticamente con el cuadrado de la velocidad de operación,
como en los ventiladores, sopladores y bombas centrifugas. En estas maquinas el PAR de arranque solo es el
requerido por fricción e inercia, que son relativamente bajos.
• Maquinas “B” – par constante:
• En estas maquinas los requerimientos de PAR no varían con la velocidad. La carga principal en estas maquinas
es la fricción, como en los transportadores, maquinas para la industria del hule y papel, líneas de proceso,
bombas de engranes, etc.
• Maquinas “C” – carga de par y potencia constante:
• En este tipo de maquinas, la demanda de PAR no aumenta al decrecer la velocidad. La potencia requerida
permanece constante para todo el rango de velocidades. Típico de esta carga, son algunos tornos donde se
requieren par constante a velocidades bajas.
•
• NOTA: Sin embargo hay maquinas que no caen bajo ninguna de estas tres consideraciones. En este caso es
necesario obtener la curva par-velocidad del fabricante.
•

CURVAS CARGAS
16. METODOS DE ACOPLAMIENTO
• METODOS DE ACOPLAMIENTO:
• Por la inercia que ofrece la propia masa del rotor, es necesario considerar todas las inercias en el sistema deacoplamiento mecánico con la carga, no todas las cargas tienen acoplamientos simples (directos) muchas otrashacen la transmisión de par por elementos mecánicos (poleas planas, poleas dentadas, bandas, cluches, etc).Inercias altas provocaran tiempos de aceleración altos.
• Lo anterior implica que tendremos acoplamientos:
• Acoplamiento directo = Las estadísticas demuestran que solo el 20% de las maquinas movidas opera a la mismavelocidad que el motor que las mueve.
• Acoplamiento con transmisión con banda o cadena:
• Los limites prácticos establecidos por NEMA. Para este tipo de transmisiones y para asegurar buena vida en laschumaceras y prevenir esfuerzos excesivos en la flecha, son:
•
• Armazón polos vel-sinc vel.nom Cp-max
• 256T 2 3600 3450 25
• 445T 4 1800 1725 200
• 445T 6 1200 1150 125
• 445T 8 900 860 100
•
•

17. EJEMPLOS
• Ejemplo-1: (METODOS DE ACOPLAMIENTO)
• Supóngase que se tiene una (CARGA) que requiere un motor de 10 CP. a una velocidad de operación de 1150
rpm. El cliente pide un motor para esa capacidad, 6 polos, 60 hz, para transmitir con bandas “V” y poleas con
relación de diámetros 1:1.
• a. Se puede pensar en probar seleccionando un motor de 2 polos con 3450 rpm, y poleas de 1/3 del diámetro,
o sea una relación de poleas de 1:3
• b . o bien utilizar un motor de 4 polos con 1725 rpm. Y relación de poleas de 1:1.5
• Abajo se ha listado el costo relativo de los tres motores. El motor de 6 polos tiene más cobre y hierro para poder
desarrollar un par mayor que los motores de 2 y 4 polos.
• Polos rpm armazón costo relativo
• 2 3450 213T 103%
• 4 1725 215T 100%
• 6 1150 256T 150%
•
• Esto implica: Que el cliente pudiera usar un motor de mayor velocidad como el de 4 polos , con relación de
poleas de 1:1.5, el esta es una consideración que se pudiera hacer con un motor mas económico , mas ligero y
fácil de montar.
EJEMPLOS
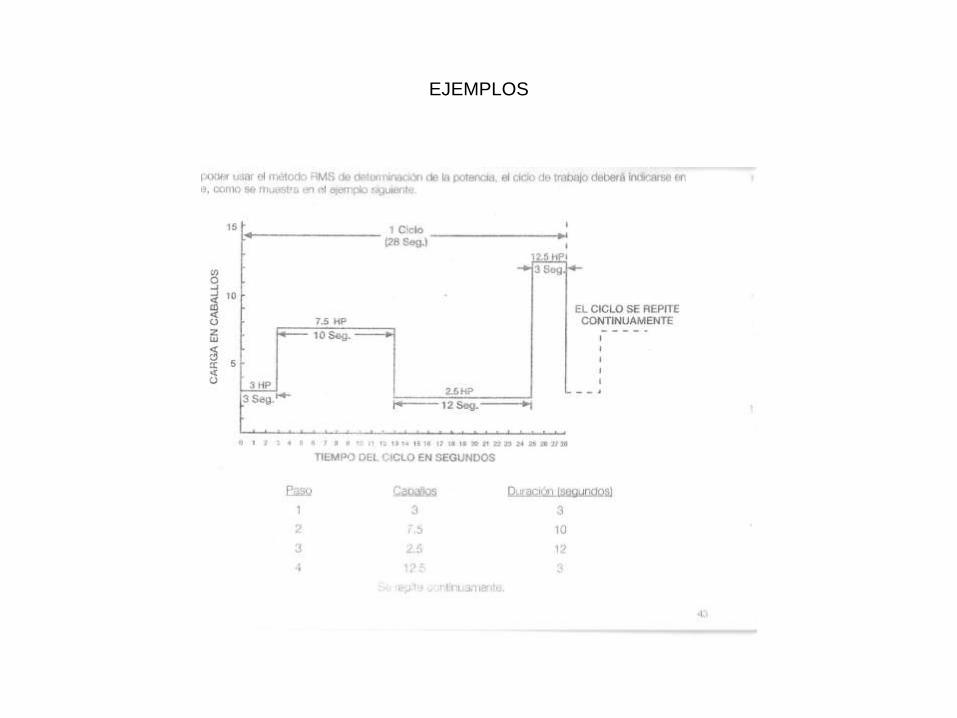
• CARGA FLUCTUANTE:
• El procedimiento para calcular si un motor es capaz para una determinada aplicación cíclica, se conoce como «METODODE CARGA DE POTENCIA EFICAZ O RMS»
• Por lo tanto es necesario conocer el promedio de la potencia en «CP» de la carga por mover.
• Ademes de reducir el costo y el tamaño de un motor para una aplicación especifica, este METODO ofrece la ventaja demejorar la eficiencia global y el F.P en este tipo de cargas
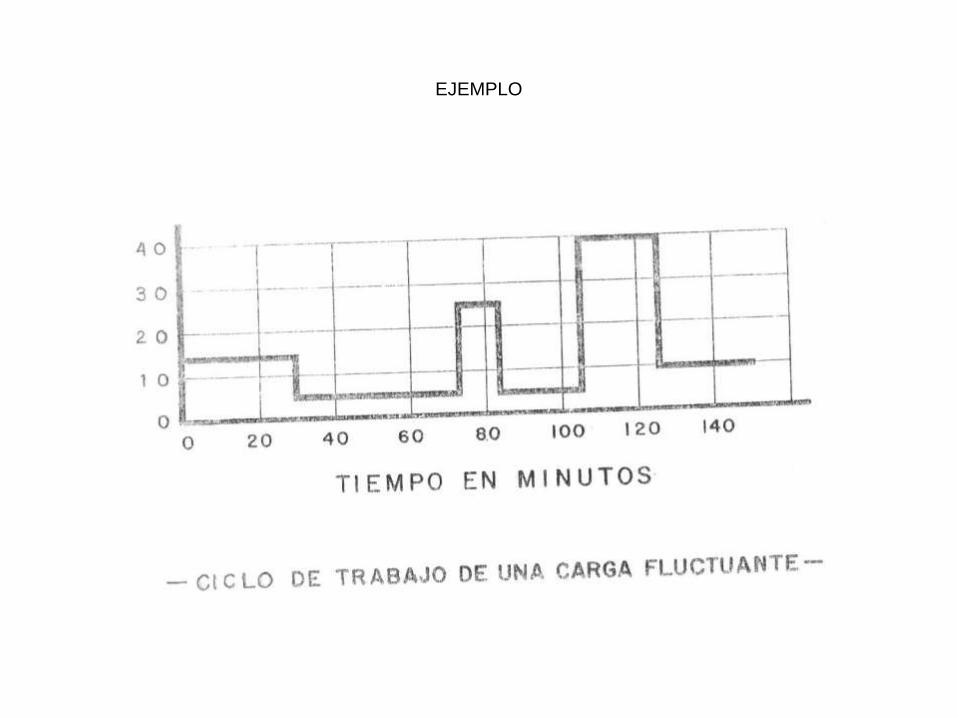
• Ejemplo-2: (CARGA FLUCTUANTE) (fig. 12)
• D e la grafica de la fig.12 se tienen los siguientes datos:
• Seleccionar un motor para una carga fluctuante, por ejemplo un transportador de carga de minerales de 1745 rpm.
• Lo primero es calcular las áreas de las potencias cuadráticas como sigue:
• PASO CABALLOS DURACION EN seg
• 1 20 30
• 2 5 48
• 3 25 10
• 4 5 20
• 5 40 20
• 6 10 15
• Formula para determinar «RMS» = Cp1 x t1 + Cp2 x t2 ….. / t1+t2+tn
•

EJEMPLOS
• SEGUNDO: Determinar la capacidad cuadrática media de la carga (Cp)
• PASO Cp Cp» t (seg) Cp x t
• 1 20 400 30 12000
• 2 5 25 48 1200
• 3 25 625 10 6250
• 4 5 25 20 500
• 5 40 1600 20 32000
• 6 10 100 15 1500
• TOTAL = 143 53450
• «RMS» = RAIZ 53450 / 143 ………….. 19.33 «»» 20 Cp.

EJEMPLOS
TERCERO: Si seleccionamos un motor de 20 CP. Con factor de servicio 1.15, (20 x 1.15= 23 Hp) , por lo que
uno de 20 CP. Parece ser el indicado.
CUARTO: El motor de propuesto de 20Cp; NO tiene la capacidad requerida. Para soportar la capacidad máx..
Requerida por la carga de 40 CP.
• QUINTO : Es comprobar si el motor de 25 Cp. con F.S de 1.15. NEMA – B; Sería el adecuado. Si tomamos lo
valores de PAR-VELOCIDAD indicados en la tabla anterior (par de arranque= 160% y par máximo= 200%)
• Una regla práctica: establece que los pares de arranque, mínimo y máximo del motor, deben estar por lo menos
20% por arriba de los pares correspondientes requeridos por la carga. (200% x 80% = 160%)
• Para el ciclo de trabajo que se muestra el % del PAR de desenganche que la carga necesita es:
•
• % Par carga des = 40 (pto Cp. máx.) / 25 (Cp. seleccionado) = 160% (carga)
• PARA 25CP, F.S=1.0 «»»» 160% carga = 160% motor (aceptable)
• PARA25CP, F.S= 1.15 «»» 139% carga es menor a 160% motor (aceptable)
EJEMPLO
EJEMPLOS

EJEMPLOS

EJEMPLOS

EJEMPLOS
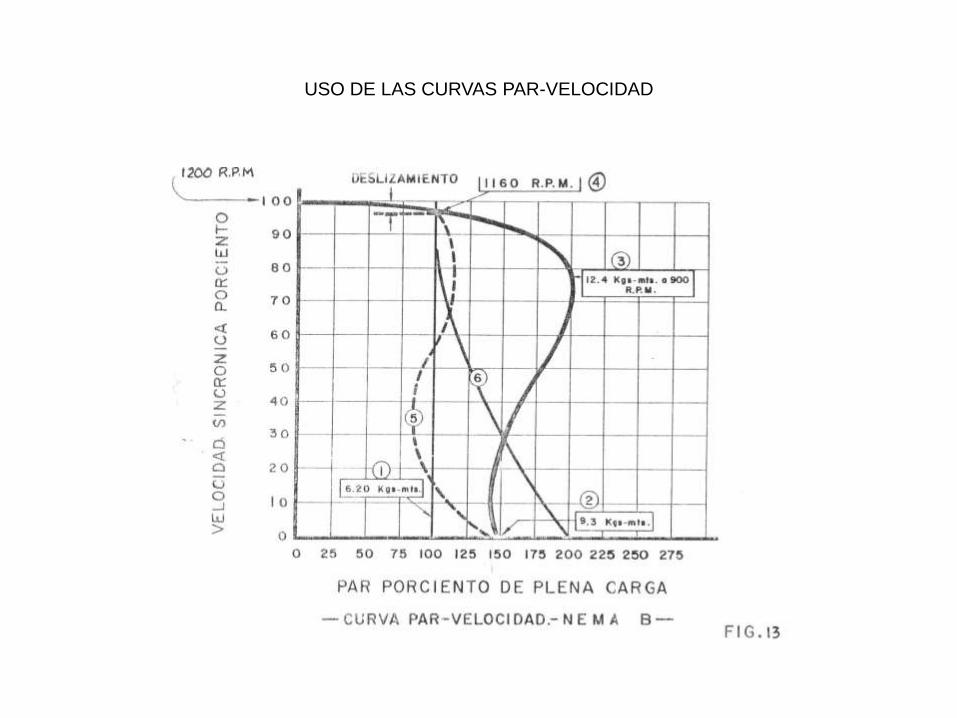
• EJEMPLO-3: (COMPORTAMIENTO DE LAS CURVAS PAR VELOCIDAD PARA MOVER UNA CARGA TIPO
• Se tiene por ejemplo un motor de 10 cp, 6 polos, 1160 rpm:
• La fig 13 muestra dos curvas típicas: UNA de la carga a mover (5) y la OTRA la del motor seleccionado.nema-d
• En donde nos indica que el motor tiene un PAR (T) a plena carga punto (1) de la curva :
• :T = CP x 726 / rpm o T = CP x 5252 / rpm (lbs-pie)
• T = 10 x 726 / 1160 = 6.20 kg-mts
• Como vemos en la fig. este motor tiene un par de arranque de 150%, punto (2), o sea un par a plena carga de9.30 kg-mts
• (6.20 x 150% = 9.30 kg-m)
• De aquí en adelante el par sigue aumentando junto con la velocidad, hasta alcanzar el 75% de la velocidadsincrónica (3).
• El motor a alcanzado hasta ahora el PAR MAX o de desenganche. La abscisa en este punto nos muestra, que elPAR es del 200% con respecto al PAR a plena carga. o sea 12. 4 kg-m a 900 RPM.
• (6.20x200%=12.4kg-m)
• Nótese que ningún punto en el ciclo de trabajo de la MAQUINA movida (5) excede el PAR MAX, del motor si estoocurre el motor se frena o sienta.
•
USO DE LAS CURVAS PAR-VELOCIDAD
EJEMPLOS
• De aquí en adelante el PAR decrece al aproximarse el motor a su velocidad de operación, muy cercana a la
velocidad sincrónica.
• En el punto (4) el motor alcanza su PAR a plena carga y opera a 1160 RPM. Como es de esperarse, es
precisamente en este punto donde el motor desarrolla su potencia nominal o de placa.
• La velocidad sincrónica del motor de 10Cp, 6 polo:
• Vel. Sinc = 120 x F / No. Polos
• = 120 x 60 / 6 = 1200 RPM
• Notamos que el punto (4) corresponde a la velocidad plena carga del motor, que en este punto es de 1160 RPM,
o sea que esta 40 RPM por debajo de la velocidad sincrónica. Por lo que su “DESLIZAMIENTO” sera:
• S = 1200 – 1160 / 1200 X 100 = 3.33 %.
• Después de todo lo anterior, resulta obvio que mientras la curva PAR-VELOCIDAD la maquina movida
permanezca dentro, o a la izquierda, de la curva PAR-VELOCIDAD del motor, este no tendrá dificultad para
acelerar y mover la carga.
• Sin embargo, si alguna porción de la característica de PAR de la maquina (carga) se sale a la derecha de la curva
del motor, deberá seleccionarse otro motor de mayor capacidad.

EJEMPLOS
• Por ejemplo la línea punteada (5) representa la curva PAR-VELOCIDAD para un molino de bolas. La curva
completa cae dentro del área de operación del motor.
• Nótese que en el arranque, la curva de la carga se acerca peligrosamente a la del motor en el punto (2). Por ello
si la situación o voltaje de alimentación es estable, puede seleccionarse el motor de 10 CP, 6 polos, NEMA B,
arrancándolo a plena tensión.
• Si la alimentación no es estable y cae frecuentemente, sería más conveniente seleccionar un motor de la misma
capacidad pero con más PAR de arranque como el NEMA C, como veremos más adelante. (ejemplo-4)

EJEMPLOS
• Ejemplo 4: PARA DESARROLLAR EN EL CURSO
• (MOLINO DE LAMINACION)
• Haciendo referencia a la curva (1) de la fig. 15. que corresponde a un molino de laminación cargado. De 20 Cp, 4
polos, 1725 rpm.
• 1. Que curva se tendría que elegir para cubrir la demanda de la carga ?
• 2. Cuales son los valores del PAR de arranque y máximo a un 70 % de su velocidad de sincronismo ?
• PARA:
a) . La carga
b) . Curva del motor seleccionado
c) . Cual seria su deslizamiento de acurdo a su apreciación de la grafica
d) . conclusiones

EJERCICIO TALLER

EJEMPLOS
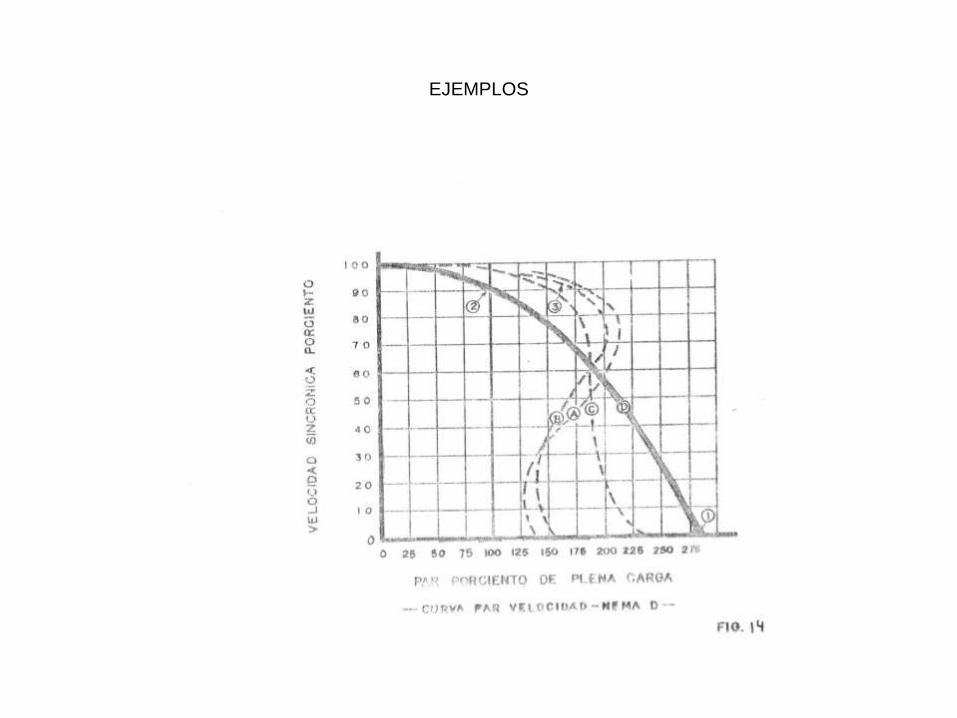
• (MOTOR DISEÑO NEMA-D)
• La curva de la línea solida, mostrada en la figura 14. representa la característica PAR-VELOCIDAD para un motor
de diseño NEMA D. Este diseño desarrolla un par de arranque (1) muy alto y que es aprox. El 275% del PAR a
plena carga. Sin embargo, como puede verse de la curva el PAR decae gradualmente durante el periodo de
aceleración, por lo que NO hay un PAR máximo o de desenganche bien definido como en los diseños A y B.
• Otra característica poco usual en este tipo de motor es su alto deslizamiento (2) a plena carga. La curva
mostrada corresponde a un motor diseño NEMA D. con deslizamiento de 10%. Los motores diseño
NEMA D. más usuales se hacen con deslizamientos entre 5 y 8 %. Y el otro grupo menos usual con
deslizamientos entre 8 y 13 %.Las curvas de este diseño lo hacen muy útil para su aplicación en dos
grandes categorías de maquinas. En primer lugar, su alto PAR de arranque lo hace adecuado para
acelerar cargas difíciles de arrancar, particularmente las del tipo pulsa torio.
• En segundo lugar, la característica en declive de la curva PAR-VELOCIDAD, lo hace idealmente
aplicable para aquellas cargas en que se requiere deceleración del motor durante los periodos o picos
de carga, de tal manera que pueda liberarse la energía cinética almacenada en un volante.
• Aplicaciones típicas incluyen prensas, para troquelado o embutido y prensas dobladoras de cortina. Tan
pronto como ha pasado el pico de carga máxima al aplicarse la carrera de trabajo, el motor volverá a
impulsar
EJEMPLOS
CONTROLADORES
• ARRANQUE DE MOTORES ELECTRICOSSEGUNDA – PARTE
•
•
•
• CIME – LEON
• 21 AGOSTO 2010


