criterios de estabilidad para sistemas
DESCRIPTION
Criterios_de_Estabilidad_para_sistemasTRANSCRIPT

1
Criterios de Estabilidad para sistemas continuos y discretos30 de marzo de 2009
Presentan:
Julio Cesar Rodríguez Cerda
Diego Langarica Córdoba
Dr. Manuel Adam Medina
Control Digital
2
1.- Introducción
2.- Criterios de Estabilidad de Jury
3.- Criterios de Estabilidad por LGR
4.- Criterio de Estabilidad por Bode
5.- Criterio de E. por Nyquist
Contenido de la Presentación.
3
1. Introducción.
El problema principal en los sistemas de control es la estabilidad.
¿En que condiciones se vuelve inestable el sistema?
¿si es inestable? ¿Cómo se estabiliza?.
Todas las interrogantes son resueltas bajo diferentes enfoques dependiendo la naturaleza del sistema (Tiempo Continuo, Discreto, lazo abierto, lazo cerrado).

4
1. Introducción.
Antes de iniciar el diseño de un controlador, es indispensable analizar la estabilidad de los sistemas.
Los métodos presentados en esta exposición son para SLIT.
1
1
)(
)(
ssU
sY Función de transferencia
Tiempo Continuo-Discreto
Espacio de estado )()(
)()()(
tDutCxy
tButAxtx
Enfoque general de los métodos de esta
presentación

5
1. Introducción.
Diferencias entre el modelo en el dominio de la frecuencia y el dominio del tiempo.
Dominio de la frecuencia:
• Control convencional.
• SISO.
• Ecuación Diferencial (t)
L
• Variable Compleja. (s)
Dominio del tiempo:
• Control moderno.
• MIMO.
• Ecuación Diferencial (t) de orden n
Variables de estado
•n ecuaciones (t) de orden 1
6
1. Introducción.
Para el manejo de los métodos de determinación de estabilidad, es necesario conocer:
>Transformada de Laplace.
>Transformada Z.

7
1.- Introducción
2.- Criterios de Estabilidad de Jury
3.- Criterios de Estabilidad por LGR
4.- Criterio de Estabilidad por Bode
5.- Criterio de E. por Nyquist
Contenido de la Presentación.

8
2. Criterio de estabilidad de Jury.
Para comprender el criterio de estabilidad de Jury de sistemas discretos, se analizan dos enfoques (Astrom, Ogata), mostrando sus diferencias.
Semejanzas:
Ambos parten del polinomio característico del sistema, indicando si los polos se encuentran dentro del circulo unitario con un método iterativo sencillo.

9
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Polinomio Característico:
Teorema de la prueba de estabilidad de Jury:Si , entonces, se tienen todas las raíces dentro del circulo unitario si y solo si todas las , , Son positivas, si es diferente de cero, entonces el numero de negativas es igual al numero de raíces fueradel circulo unitario

10
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Pasos para determinar la estabilidad bajo este criterio:
Paso 1: Partir del Polinomio característico del sistema a analizar e identificar los coeficientes y el numero de filas a elaborar (2n+1).
Donde n es el orden del sistema.

11
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Paso 2: De los coeficientes del polinomio característico se forma la siguiente tabla.

12
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Paso 2:
Las primeras dos filas son los coeficientes del polinomio, al derecho y al revés, la tercera fila se obtiene multiplicando por
a la segunda fila y restándose este producto a la primer fila, la cuarta fila es la inversa de la tercera.
0aan
n

13
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Paso 3: analizar los coeficientes para los tres casos posibles:> Caso 1: si , es inestable (raíces fuera
del circulo unitario
> Caso 2: si , es marginalmente estable (raíces en el circulo unitario).
> Caso 3: si , es estable (raíces dentro del circulo unitario).
ka0
00 ka
00 ka
00 ka
14
2.1. Según Astrom
2. Criterio de estabilidad de Jury.
Ejemplo: determinar si las raíces del polinomio se encuentran dentro del circulo unitario, usando el criterio de estabilidad de Jury.
Paso 1:
Donde:
La identificación de los coeficientes:
El numero de filas es:
09.05.12 zz2n
9.05.1,1 210 aaa
512 n

15
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Paso 2: Construcción de la tabla.
1 -1.5 0.9
0.9 -1.5 1
0.19 -0.15 0
-0.15 0.19
0.07 0
9.01
9.0
0
a
ann
789.019.0
15.01
0
11
1
n
nn
n a
a

16
2. Criterio de estabilidad de Jury.
2.1. Según Astrom
Paso 3:
Se tiene el caso 3.
El sistema es estable por que todas las entonces se dice que todas las raíces de este polinomio están dentro del circulo unitario.
00 a

17
2. Criterio de estabilidad de Jury. Según Ogata
Este método prueba la estabilidad absoluta, revela la existencia de cualquier raíz inestable, pero no da su localización.
Pasos para determinar la estabilidad:
Paso 1: Partir de la ecuación característica del sistema, identificar los coeficientes y determinar el numero de filas de la tabla.
nnnn azazazazP 11
10 ...)(

18
2. Criterio de estabilidad de Jury. Según Ogata
Paso 2: Verificar si , el sistema es estable, si todas las condiciones siguientes se cumplen:
Condición 1:
Condición 2:
Condición 3:
00 a
on aa
0|)( 1zzP
imparnpara
parnparazP z 0
0|)( 1

19
2. Criterio de estabilidad de Jury. Según Ogata
Condición 4:
02
02
01
cc
bb
n
n

20
2. Criterio de estabilidad de Jury. Según Ogata
Paso 3: Formar una tabla que tendrá 2n-3 filas, un sistema de segundo grado le corresponde una fila.
El siguiente ejemplo muestra los 3 pasos para la determinación de la estabilidad.

21
Ejemplo: examine la estabilidad de la ecuación característica siguiente.
Paso 1: Ecuación característica del sistema.
Identificación de los coeficientes:
se forma una tabla de 2n+3=5 filas,
donde n es el orden del sistema.
008.03.007.02.1)( 234 zzzzzP
08.0
3.0
07.0
2.1
1
4
3
2
1
0
a
a
a
a
a
2. Criterio de estabilidad de Jury. Según Ogata

22
2. Criterio de estabilidad de Jury. Según Ogata
Paso 2: verificar condiciones.Condición 1, se cumple:
Condición 2, se cumple:
Condición 3, se cumple:
108.0
4
oaa
009.008.03.007.02.11)1( P
4089.108.03.007.02.11)1( parnparaP

23
2. Criterio de estabilidad de Jury. Según Ogata
Paso 3: tabla de estabilidad.
Renglón z0 z1 z2 z3 z4
-0.08 1 =b3=-0.994
1 -0.08
-0.08 -1.2 =b2=1.176
1 0.3
-0.08 0.07 =b1=-0.0756
1 0.07
1 -0.08 0.3 =b0=-0.204
2 1 -1.2
-0.994 -0.204 =c2=0.946
-0.204 -0.994
-0.994 -0.0756 =c1-1.184
-0.204 1.176
3 -0.994 1.176 =c0=0.315
4 -0.204 -0.0756
5 0.946 -1.184 0.315

24
2. Criterio de estabilidad de Jury. Según Ogata
Condición 4, se cumple:
Del cumplimiento de todas las condiciones, se dice que el sistema es estable y que todas sus raíces están dentro del circulo unitario
02
03
315.0946.0
204.0994.0
cc
bb

25
2. Criterio de estabilidad .
Diferencias entre el criterio de estabilidad de Jurysegún …
Astrom:
• solo verifica que:
Inestable00 kaMarginal- mente estable.
00 ka
Estable00 ka
Ogata:
• verifica que se cumpla:
00 a on aa
0|)( 1zzP
imparnpara
parnparazP z 0
0|)( 1

26
1.- Introducción
2.- Criterios de Estabilidad de Jury
3.- Criterios de Estabilidad por LGR
4.- Criterio de Estabilidad por Bode
5.- Criterio de E. por Nyquist
Contenido de la Presentación.
27
3.- Criterios de Estabilidad por LGR
El método del lugar geométrico de las raíces desarrollado para sistemas en tiempo continúo puede ser extendido sin modificaciones a sistemas en tiempo discreto, excepto por que el límite de la estabilidad queda modificado del eje jw en el plano s al círculo unitario en el plano z. Tiene la misma forma que la del sistema en el tiempo continuo en el plano s.

28
3.- Criterios de Estabilidad por LGR
REGLAS GENERALES PARA LA CONSTRUCCIÓN DE LUGAR GEOMETRICO DE LAS RAICES
1. Obtenga la ecuación característica:
2.Y a continuación reacomoda esta ecuación de tal forma que el parámetro de interés como la ganancia k aparezca como factor multiplicador o factorizando, se obtienen los puntos de inicio y los puntos de terminación del lugar geométrico de las raíces :

29
3.- Criterios de Estabilidad por LGR
3. Determine el lugar geométrico de las raíces sobre el eje real se determina por los polos en lazo abierto y los ceros que quedan sobre él LGR. Los polos y ceros complejos conjugados no tienen efecto en la localización del LGR sobre el eje real porque la contribución angular es de 360º sobre el eje real.
4. Determine las asíntotas del lugar geométrico de raíces. Sin el punto de prueba z está localizado lejos del origen, entonces los ángulos de todas las cantidades complejas pueden considerarse iguales.

30
3.- Criterios de Estabilidad por LGR
Por lo tanto, el lugar geométrico de las raíces para valores muy grandes de z debe ser asintótico a líneas rectas cuyos ángulos están dados como sigue:
De donde

31
3.- Criterios de Estabilidad por LGR
5. Encuentre los puntos de ruptura de entrada y salida. En vista de la simetría conjugada de los lugares geométricos de las raíces, los puntos de ruptura de salida y de entrada se presentan o sobre el eje real o en pares complejos conjugados. La función se escribe en la forma: Y los puntos de ruptura de salida y de entrada (que corresponden a raíces múltiples) se pueden determinar a partir de las raíces:

32
3.- Criterios de Estabilidad por LGR
6. Determine el ángulo de salida (o el ángulo de llegada) del LGR a partir de los polos complejos (o en los ceros complejos), debemos encontrar la dirección del LGR cerca de los polos y de los ceros complejos. EL ángulo de salida (o a un cero complejo), puede determinarse al sustraer de 180º la suma de todos los ángulos de las líneas.7. Encuentre los puntos donde los lugares geométricos de las raíces cruzan el eje imaginario. Los puntos donde el lugar geométrico de las raíces cruzan al eje imaginario pueden determinarse definiendo en la ecuación característica ), e igualamos tanto la parte real como la imaginaria con cero, se resuelve en función de v y de K.

33
3.- Criterios de Estabilidad por LGR
Los valores de v y de K que así se encuentren darán la localización en la cual el lugar geométrico de las raíces cruzan el eje imaginario y el valor de la ganancia correspondiente K, respectivamente. Donde: w=jv

34
3.- Criterios de Estabilidad por LGR
8. Un punto determinado será un polo en lazo cerrado cuando el valor de la ganancia K satisfaga la condición de magnitud. Por otra parte, la condición de magnitud nos permite determinar el valor de la ganancia K en un lugar especifico dentro LGR. La condición de magnitud es: Es decir :

35
3.- Criterios de Estabilidad por LGR
Ejemplo: Suponga que el controlador digital es del tipo integral, es decir que:

36
3.- Criterios de Estabilidad por LGR
Primero obtenemos la transformada z de:
(4-25)

37
3.- Criterios de Estabilidad por LGR
La ecuación característica es:
Es decir
Periodo de muestreo T= 0.5seg : para este caso, la ecuación (4.25) se convierte en:
Observe que G(z) tiene polos en z=1 y en z=0.6065 y un cero en z=0.

38
3.- Criterios de Estabilidad por LGR
El punto de ruptura de salida y el punto de ruptura de entrada se determinan escribiendo la ecuación característica en la forma de la ecuación: (4-27)
Y diferencia K con respecto a z igualando el resultado con cero:

39
3.- Criterios de Estabilidad por LGR
De ahí;
Es decir:
Observe que la sustitución de z por 0.7788 en la ecuación (4-27) da un valor de K=0.1244, en tanto que si se supone z= -0.7788 que da un valor de K=8.041. dado que ambos valores de K son positivos, z= 0.7788 resulta el punto de ruptura de salida real y z= -0.7788 es el punto de ruptura de entrada real.

40
3.- Criterios de Estabilidad por LGR
Figura 4-24 a) Diagrama del lugar geométrico de las raíces para el sistema mostrado en la figura 4-23 cuando T=0.5seg;

41
En vista de que la ganancia critica Kc corresponde al punto , sustituimos z por -1 en la ecuación 4-28:
La ganancia crítica Kc es por lo tanto 8.165.
Ecuación característica LC:
3.- Criterios de Estabilidad por LGR

42
3.- Criterios de Estabilidad por LGR
Los polos en lazo cerrado que corresponden a K=2 se pueden determinar como :
El factor de amortiguamiento relativo de los polos 𝝃en lazo cerrado se pueden determinar en forma analítica a partir de la localización del polo en lazo cerrado en el plano z.

43
3.- Criterios de Estabilidad por LGR
Dado que , el punto correspondiente en el plano z es:

44
Del cual obtenemos: (4-29)
Y (4-30)
De las ecuaciones 4-29 y 4-30 se puede calcular el valor de z. Por ejemplo, en el caso en que el periodo de muestreo T es de 0.5 seg, tenemos el polo en lazo cerrado para K=2 en:
3.- Criterios de Estabilidad por LGR

45
3.- Criterios de Estabilidad por LGR
Por lo tanto:
Resolviendo
También el ángulo es
Por lo tanto

46
3.- Criterios de Estabilidad por LGR
De las ecuaciones (4-31) y (4-32), obtenemos
Simplificando
Lo que nos da
Frecuencia natural no amortiguada

47
3.- Criterios de Estabilidad por LGR
Otra forma de obtener el factor de amortiguamiento
La frecuencia natural no amortiguada
Tiempo de asentamiento

48
Tiempo de asentamiento
Polos dominantes:
Asíntotas Nº asíntotas= Nº polos - Nºceros
3.- Criterios de Estabilidad por LGR

49
3.- Criterios de Estabilidad por LGR
La función de transferencia pulso en lazo cerrado para el sistema de la figura 4-23, cuya función de transferencia pulso de la trayectoria directa G(z) esta dada por la ecuación (4-25) es
Para T=0.5seg
50
De la figura 4-25 vemos que el ángulo θ de la línea que conecta el origen y el polo dominante en lazo cerrado en (esta línea es una línea w constante en el plano s) es de alrededor de 58.25º. El ángulo θ de los polos dominantes en lazo cerrado determina el número de muestras por ciclo de oscilación senoidal.
3.- Criterios de Estabilidad por LGR
51
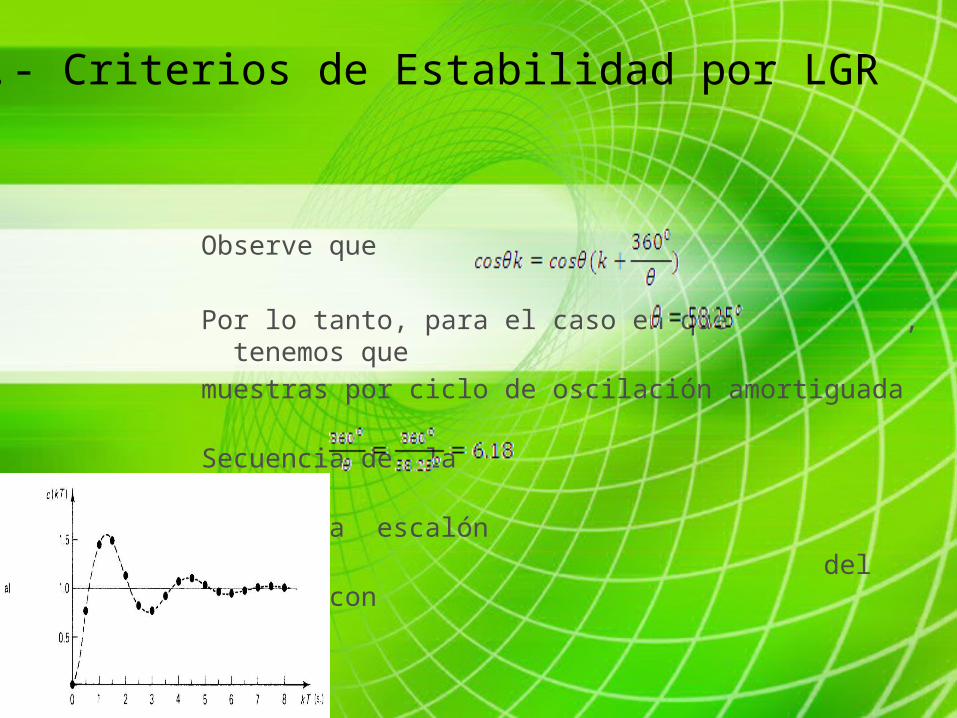
Observe que
Por lo tanto, para el caso en que , tenemos quemuestras por ciclo de oscilación amortiguada Secuencia de la respuesta escalón del sistema con T=0.5seg
3.- Criterios de Estabilidad por LGR

52
3.- Criterios de Estabilidad por LGR
Para el caso en que el periodo de muestreo T es 0.5 seg y la ganancia K=2, la función de transferencia pulso en lazo abierto es:
Y la constante de error de velocidad estática K, está dada por
Error

53
1.- Introducción
2.- Criterios de Estabilidad de Jury
3.- Criterios de Estabilidad por LGR
4.- Criterio de Estabilidad por Bode
5.- Criterio de E. por Nyquist
Contenido de la Presentación.
54
4.- Criterio de Estabilidad por Bode
El concepto de respuesta en frecuencia juega un importante papel en los sistemas de control digital, de la misma forma que lo hace en los sistemas de control en tiempo continuo. Este método de respuesta en frecuencia en frecuencia se emplea en el diseño de controladores. La razón básica es la sencillez de los métodos.

55
TRANSFORMACIÓN BILINEAL Y EL PLANO W
Antes de aplicar el método de la respuesta en frecuencia al análisis y diseño de sistemas de control en tiempo discreto, son necesarias ciertas modificaciones al método del plano z. Dado que en el plano z la frecuencia aparece en la forma
4.- Criterio de Estabilidad por Bode

56
4.- Criterio de Estabilidad por Bode
La aplicación de directa de los métodos de respuesta en frecuencia no merece tomarse en consideración para sistemas discretos por que debe de pasar por una transformación.Esta transformada llamada comúnmente transformada w, es decir una transformada bilineal, queda definida por:

57
Mediante la transformada z y la transformada w, la franja primaria del semiplano izquierdo del plano s es primero transformada al interior del círculo unitario en el plano z y a continuación transformada a la totalidad del semiplano izquierdo del plano w.
4.- Criterio de Estabilidad por Bode

58
4.- Criterio de Estabilidad por Bode
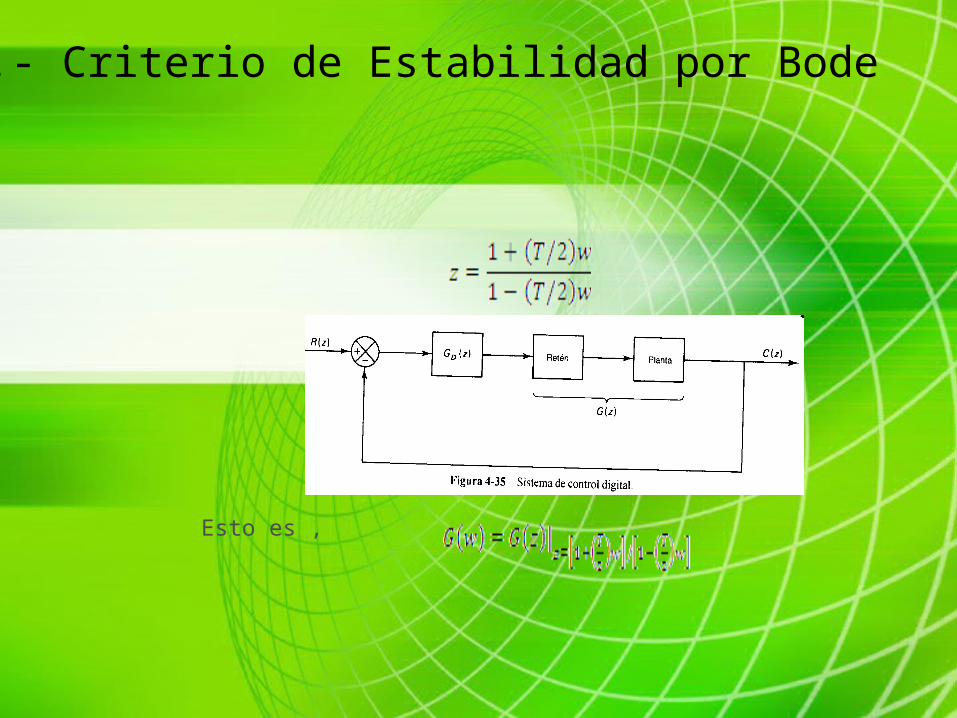
PROCEDIMIENTO DE DISEÑO EN EL PLANO W
1. Refiriéndose al sistema de control digital que se muestra, el procedimiento de diseño en el plano w puede enunciarse como sigue:Primero obtenga , la transformada z de la planta. A continuación transforme en una función de transferencia mediante la transformación bilineal dada por la ecuación:
59
Esto es ,
4.- Criterio de Estabilidad por Bode

60
Es importante que se seleccione adecuadamente en el periodo de muestreo T. Una regla practica es muestrear de 10 veces el ancho de franja del sistema en lazo cerrado. 2. Sustituya en y trace el diagrama Bode para .
3. Lea del diagrama Bode las constantes de error estático, el margen de fase y el margen de fase y el margen de ganancia
4.- Criterio de Estabilidad por Bode
61
4.- Criterio de Estabilidad por Bode
4. Transforme la función de transferencia del controlador en mediante la transformación bilineal dada por la ecuación:
Entonces 5. Lleve a cabo la función de transferencia pulso mediante un algoritmo de calculo.

62
4.- Criterio de Estabilidad por Bode
Ejemplo:Considere el sistema y obtenga los diagramas de magnitud y fase correspondientes en el plano w de tal forma que el margen de fase sea 50º, el margen de ganancia sea de por lo menos 10dB, y la constante de error de velocidad estática K sea 2 . Suponga que el periodo de muestreo es 0.2 segundos, es decir, que T=0.2.

63
4.- Criterio de Estabilidad por Bode
Primero obtenemos la función de transferencia pulso G(z) de la planta que está precedida por un retenedor de orden cero:

64
4.- Criterio de Estabilidad por Bode
A continuación, se transforma la función de transferencia pulso G(z) en una función de transferencia G(w) mediante la transformación bilineal dada por:

65
Tenemos que:
4.- Criterio de Estabilidad por Bode

66
Un compensador simple de adelanto de fase probablemente satisfará todos los requisitos. Por lo tanto, probaremos compensación mediante adelanto.
La función de transferencia en lazo abierto es:
4.- Criterio de Estabilidad por Bode

67
La constante de error de velocidad estática Kv queda especificada como 2seg .por lo tanto
4.- Criterio de Estabilidad por Bode

68
Tabla de los diferentes factores básico de la función de transferencia:
4.- Criterio de Estabilidad por Bode
69
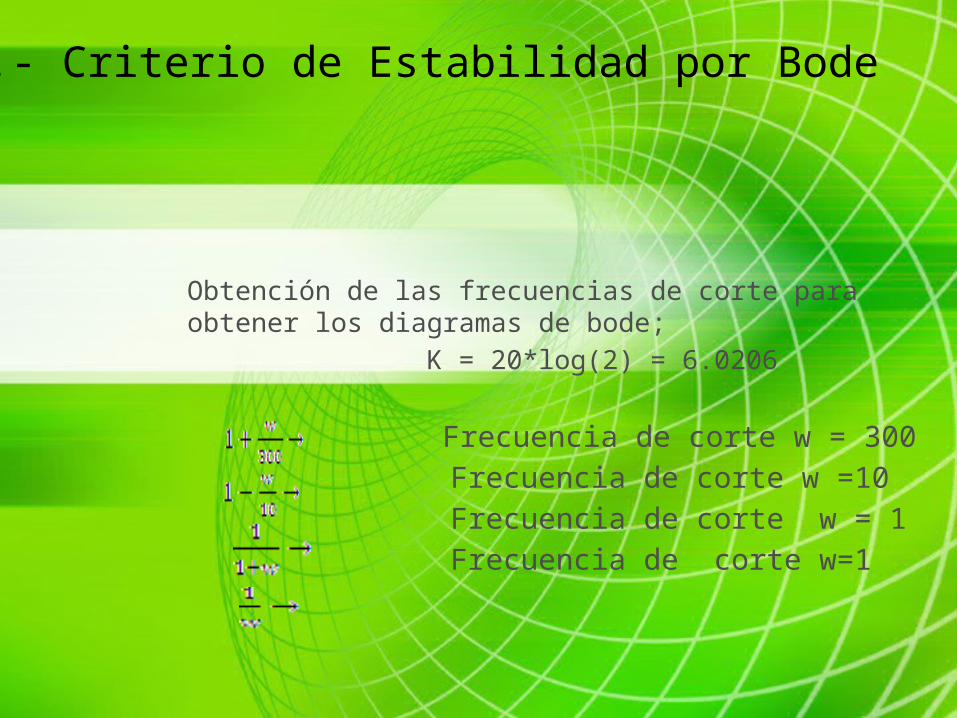
Obtención de las frecuencias de corte para obtener los diagramas de bode; K = 20*log(2) = 6.0206
Frecuencia de corte w = 300 Frecuencia de corte w =10 Frecuencia de corte w = 1 Frecuencia de corte w=1
4.- Criterio de Estabilidad por Bode

70
4.- Criterio de Estabilidad por Bode
Angulo de fase: , (la recta es de +45º/dec a partir de w=300 hasta w=3000) (la recta es de +45º/dec a partir de w=10 hasta w=100) , w=1 (la recta es de -45º/dec a partir de w=1 hasta w=10)

71
4.- Criterio de Estabilidad por Bode
Grafica de magnitud y fase

72
1.- Introducción
2.- Criterios de Estabilidad de Jury
3.- Criterios de Estabilidad por LGR
4.- Criterio de Estabilidad por Bode
5.- Criterio de E. por Nyquist
Contenido de la Presentación.

73
5. Criterio de estabilidad de Nyquist.
Los diagramas de Nyquist se usan en la representación en frecuencia de los sistemas de control LIT retroalimentados.Se usan graficas polares para determinar la estabilidad de lazo cerrado, a partir de la respuesta en frecuencia en lazo abierto y de los polos en lazo abierto.El criterio es útil ya que determina la estabilidad absoluta en lazo cerrado a partir de las curvas de frecuencia en lazo abierto, sin ser necesario conocer los polos de lazo cerrado.

74
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
Considere el sistema en Lazo cerrado:
Con su función de transferencia:
El polinomio característico:
)()(1
)(
)(
)(
sHsG
sG
sR
sC
0)()(1 sHsG

75
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
Para la estabilidad todas las raíces del polinomio característico deben estar en el semiplano izquierdo del plano s.
Nota: no importa que los polos de la función de transferencia de lazo abierto estén en el semiplano derecho.)()( sHsG

76
Criterio de estabilidad: (caso especial cuando G(s)H(s) no tiene polos y ceros sobre el eje jw) .
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
Si la función de transferencia G(s)H(s) de lazoabierto tiene k polos en el semiplano derecho de s,para la estabilidad, el lugar geométricoG(jw)Hjw) , conforme w varia de -∞ a ∞,debe rodear k veces el punto -1+j0 ensentido contrario a las manecillas del reloj.

77
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
Esto se expresa como:
Z=N+P
Donde:
Z=numero de ceros de 1+G(s)H(s) en el semiplano derecho.
N=numero de rodeos en el sentido de las agujas de reloj del punto -1+j0.
P=numero de polos de G(s)H(s) en el semiplano derecho.
78
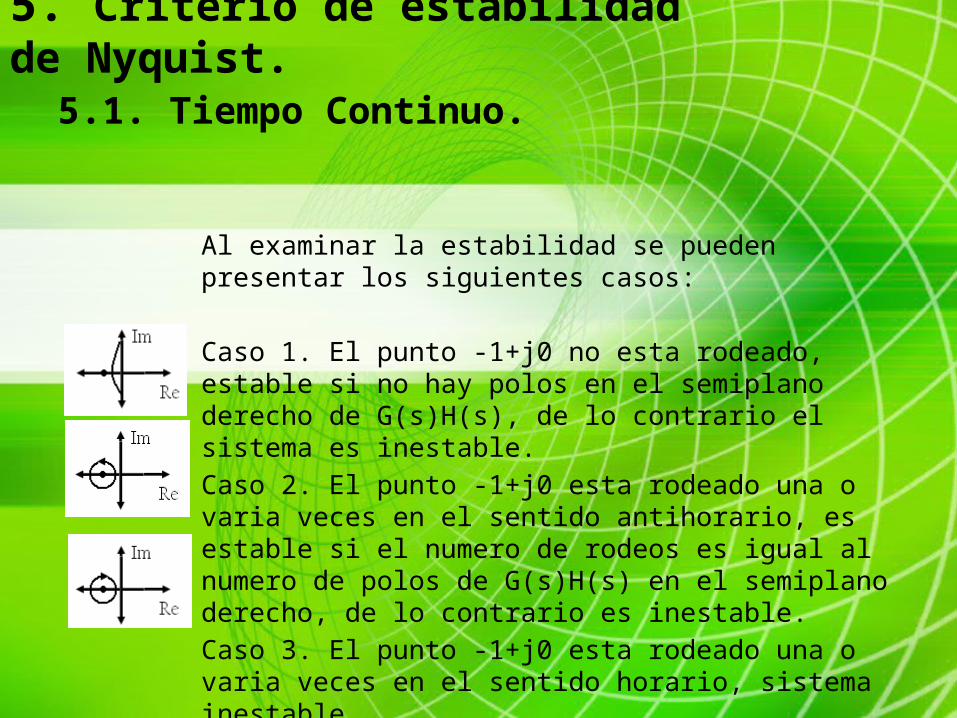
Al examinar la estabilidad se pueden presentar los siguientes casos:
Caso 1. El punto -1+j0 no esta rodeado, estable si no hay polos en el semiplano derecho de G(s)H(s), de lo contrario el sistema es inestable.
Caso 2. El punto -1+j0 esta rodeado una o varia veces en el sentido antihorario, es estable si el numero de rodeos es igual al numero de polos de G(s)H(s) en el semiplano derecho, de lo contrario es inestable.
Caso 3. El punto -1+j0 esta rodeado una o varia veces en el sentido horario, sistema inestable.
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
79
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
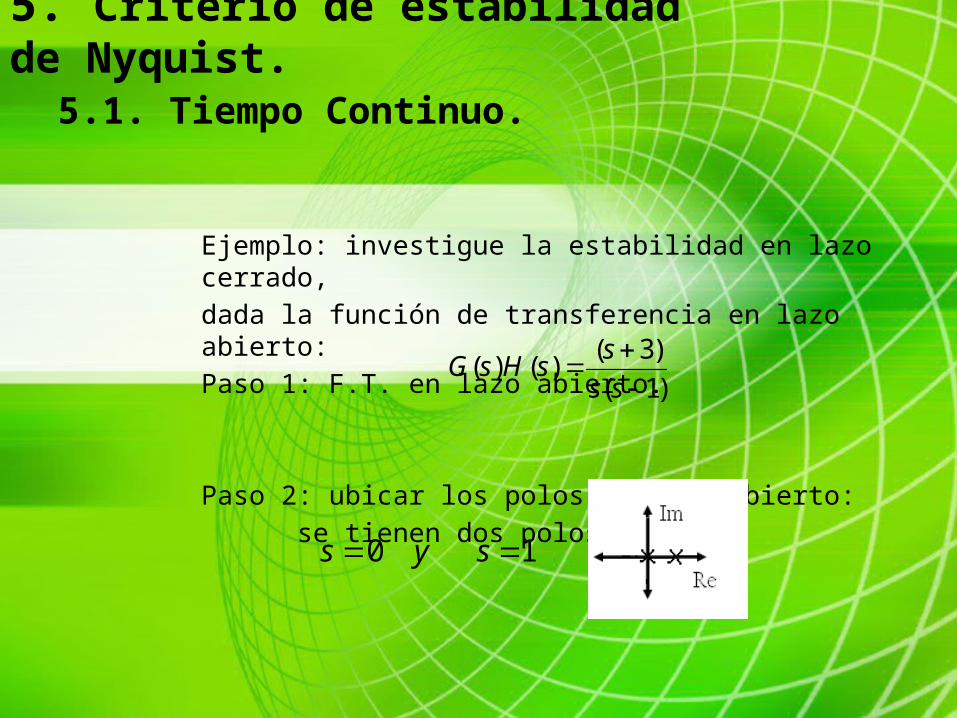
Ejemplo: investigue la estabilidad en lazo cerrado,
dada la función de transferencia en lazo abierto:
Paso 1: F.T. en lazo abierto.
Paso 2: ubicar los polos de lazo abierto:
se tienen dos polos.
)1(
)3()()(
ss
ssHsG
10 sys

80
5. Criterio de estabilidad de Nyquist.5.1. Tiempo Continuo.
Paso 3: determinar el diagrama polar:
Paso 4: Determinar Z, N y P.
P =(numero de polos de G(s)H(s) en el semiplano derecho)=1N= # rodeos en el sentido horario del punto -1+j0=-1Z=N+P=-1+1=0 ceros de 1+G(s)H(s) en el semiplano
derecho.
Paso 5: determinar la estabilidad según sea el caso.Caso 2, estable por que 0=N+P
N=-P-1=-(1)
81
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
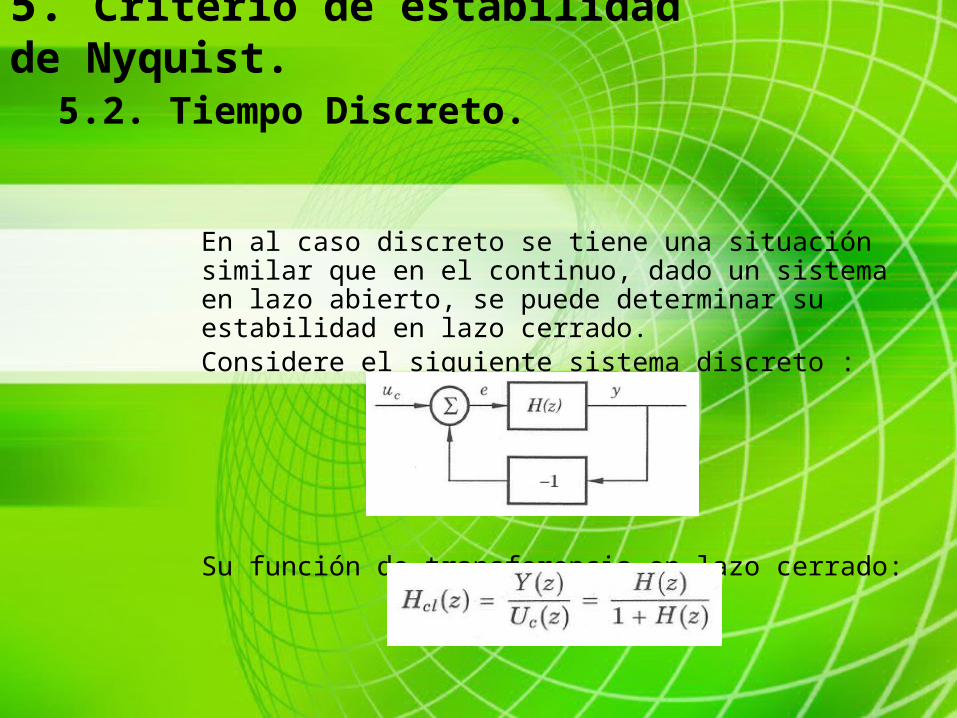
En al caso discreto se tiene una situación similar que en el continuo, dado un sistema en lazo abierto, se puede determinar su estabilidad en lazo cerrado.Considere el siguiente sistema discreto :
Su función de transferencia en lazo cerrado:

82
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
La ecuación característica del sistema:
La estabilidad de este sistemas se puede deducir de la grafica de Nyquist de lazo abierto H(z), para lo sistemas discretos, la estabilidad esta determinada por el área del circulo unitario.
Definamos a como la trayectoria de Nyquist
Que es para
83
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
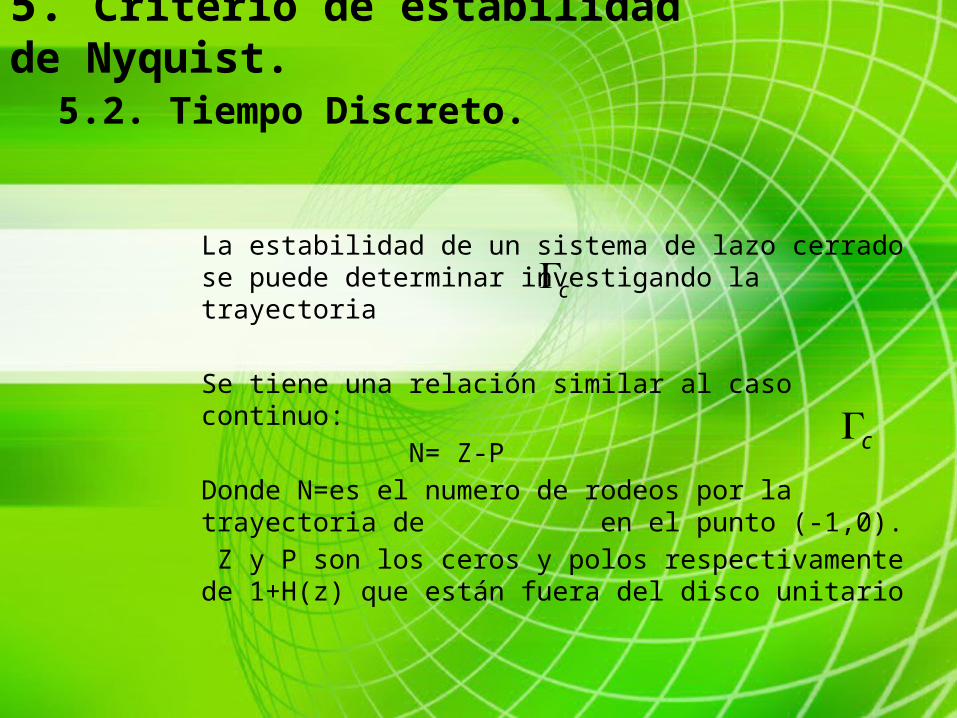
La estabilidad de un sistema de lazo cerrado se puede determinar investigando la trayectoria
Se tiene una relación similar al caso continuo:
N= Z-P
Donde N=es el numero de rodeos por la trayectoria de en el punto (-1,0).
Z y P son los ceros y polos respectivamente de 1+H(z) que están fuera del disco unitario
c
c

84
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
Trayectoria de Nyquist encerrando el exterior del circulo unitario.
Excluye los integradores
de lazo abierto en z=1.
La estabilidad se
se asegura si
no encierra a
el punto (-1,0)

85
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
Ejemplo: considere un sistema con un periodo de muestreo h=1 y su función de transferencia:
Paso 1: Partir de la función de transferencia:
Paso 2: Hacer el cambio H(z) por H(eiw) para w=0 hasta π, recordemos que:
Entonces: isenwwe iw cos
86
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
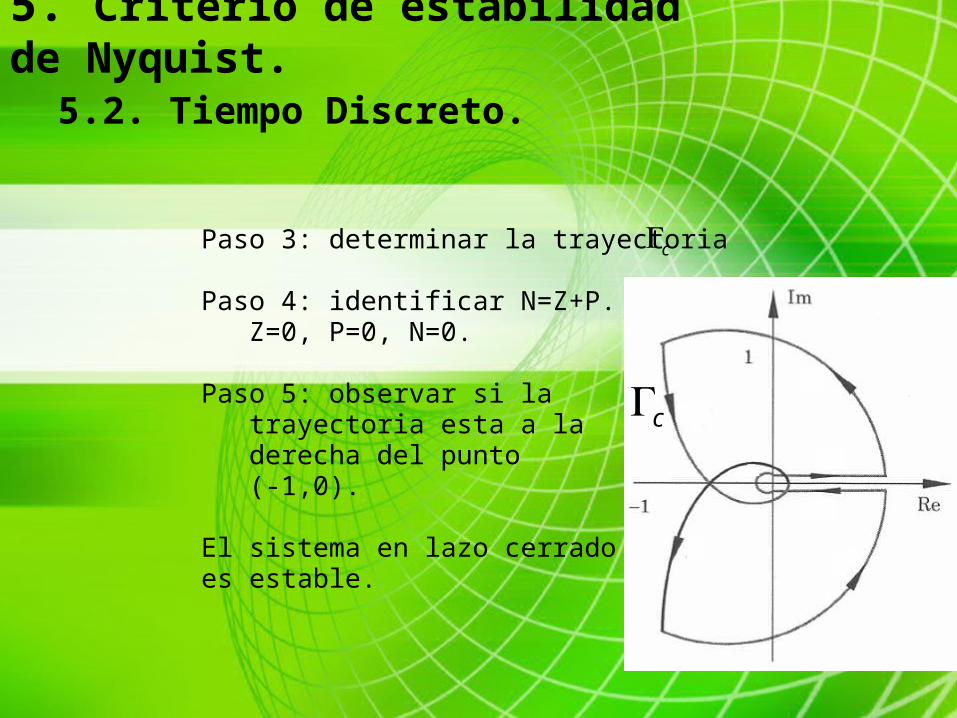
Paso 3: determinar la trayectoria
Paso 4: identificar N=Z+P.Z=0, P=0, N=0.
Paso 5: observar si latrayectoria esta a la derecha del punto(-1,0).
El sistema en lazo cerrado es estable.
c
c

87
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
Diferencias entre el criterio de estabilidad de Nyquist en tiempo continuo y discreto.
Continuo:
•Para estabilidad, los polos en lazo cerrado deben estar en el semiplano izquierdo s.
•Z es el # de ceros de lazo cerrado en el semiplano derecho s.
•P es el # de polos de lazo abierto en el semiplano derecho s.
•N # de rodeos en el sentido de las agujas de reloj del punto -1+j0.
Discreto:
•Para estabilidad, los polos en lazo cerrado deben estar contenidos por el circulo unitario.
•Z es el # de ceros de lazo cerrado fuera del circulo unitario.
•P es el # de polos de lazo cerrado fuera del circulo unitario.•N es el # de rodeos por la trayectoria en el punto (-1,0)

88
5. Criterio de estabilidad de Nyquist.5.2. Tiempo Discreto.
Se analizaron métodos para verificar estabilidad en los sistemas, algunos con mayor complejidad que otros, pero todos representan una herramienta que podemos utilizar en cualquier momento siendo valida la conclusión a la que se llegue.
Existen diferentes maneras de abordar la estabilidad en los sistemas, lo importante es conocer los conceptos asociados a los métodos.

89
BibliografíaIngeniería de Control Moderna, Ogata Katsuhiko, tercera edición, Prentice Hall.
Computer Controlled Systems, theory and design, Astrom-Wittenmark, third edition, Prentice Hall.