coordenadas homogéneas y transformaciones - …f1a-libretti.pdf · transformaciones daniel fariña...
TRANSCRIPT
Coordenadas Homogéneas y
Transformaciones
Daniel Fariña 06-39509
Laura Libretti 06-39796
Computación Gráfica I
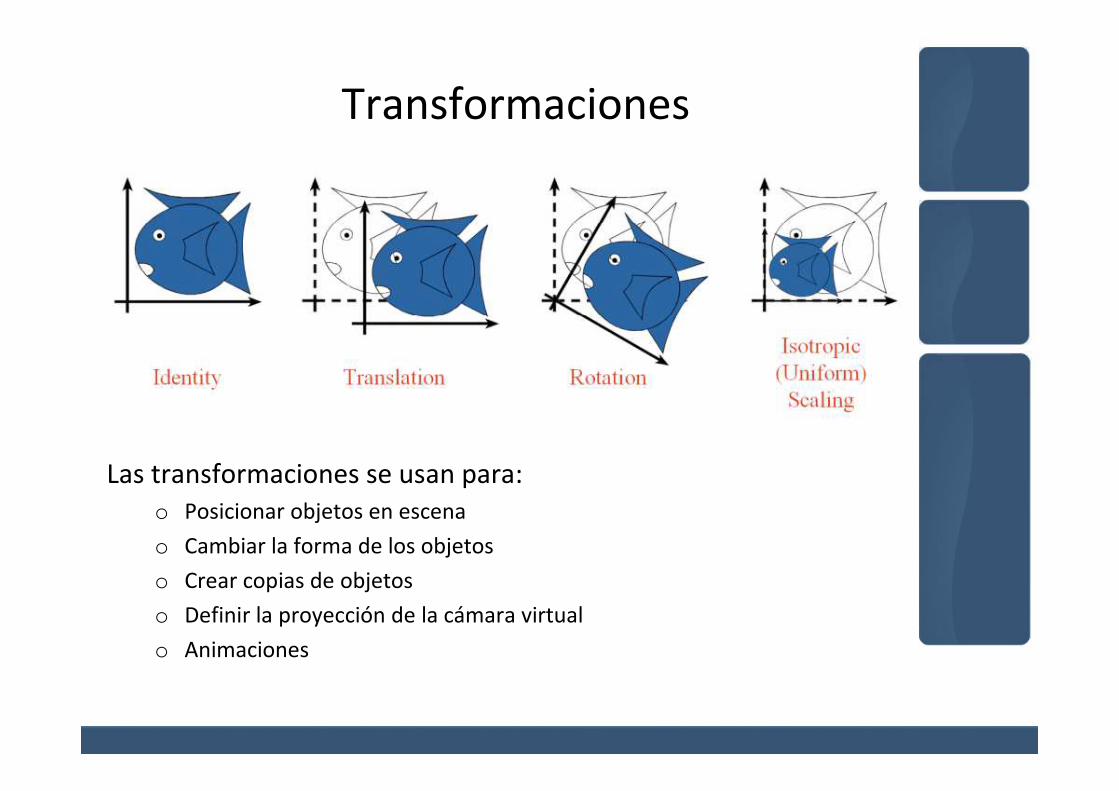
Transformaciones
Las transformaciones se usan para:
o Posicionar objetos en escena
o Cambiar la forma de los objetos
o Crear copias de objetos
o Definir la proyección de la cámara virtual
o Animaciones
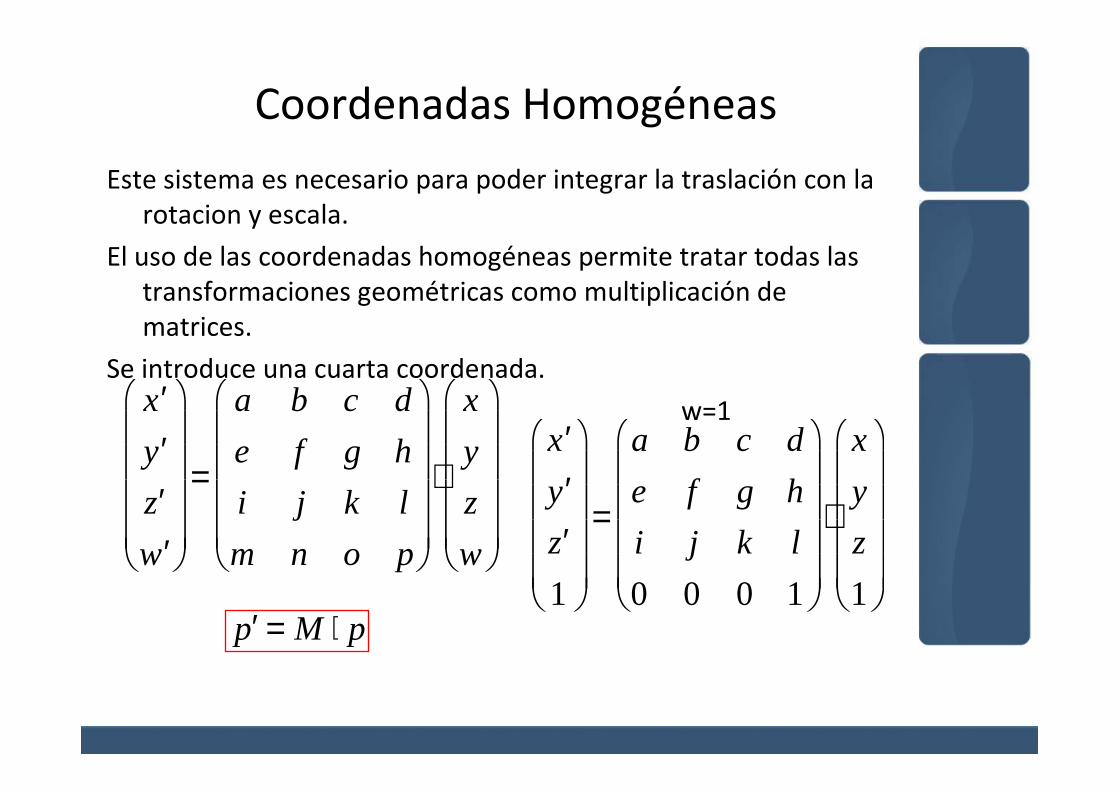
Coordenadas Homogéneas
Este sistema es necesario para poder integrar la traslación con la
rotacion y escala.
El uso de las coordenadas homogéneas permite tratar todas las
transformaciones geométricas como multiplicación de
matrices.
Se introduce una cuarta coordenada.
w=1′ x
′ y
′ z
′ w
=
a b c d
e f g h
i j k l
m n o p
⋅
x
y
z
w
′ x
′ y
′ z
1
=
a b c d
e f g h
i j k l
0 0 0 1
⋅
x
y
z
1
′ p = M ⋅ p
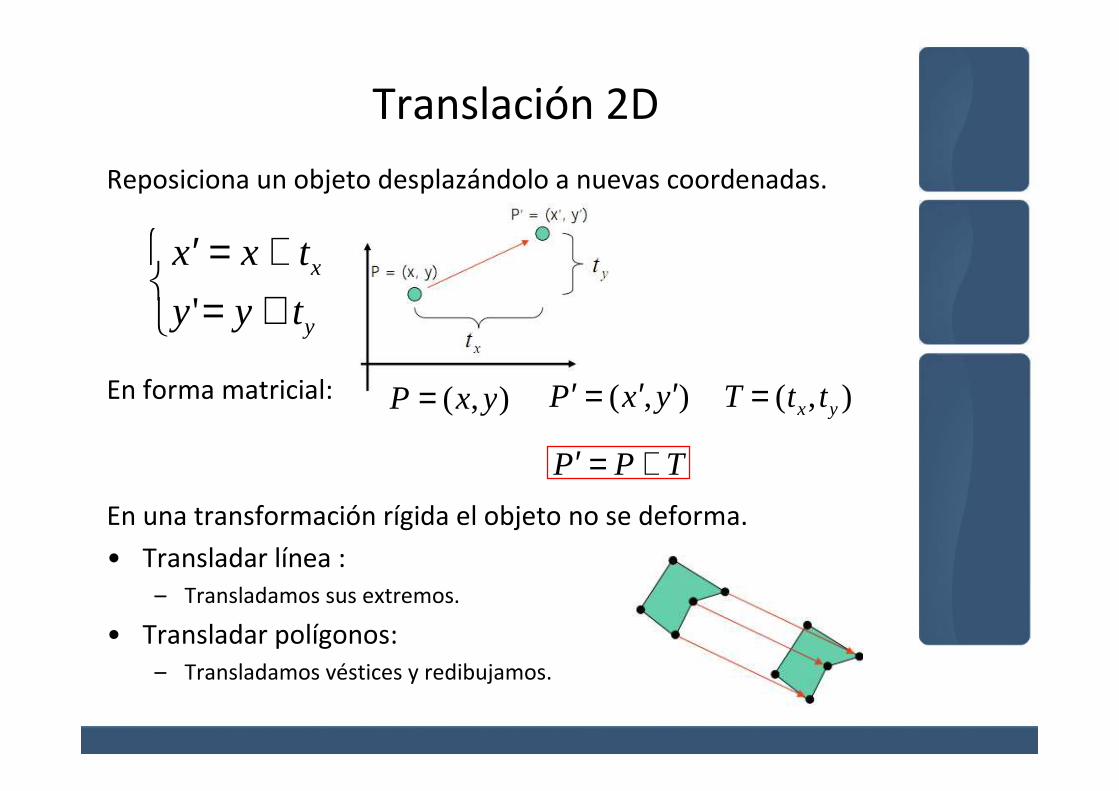
Translación 2D
Reposiciona un objeto desplazándolo a nuevas coordenadas.
En forma matricial:
En una transformación rígida el objeto no se deforma.
• Transladar línea :
– Transladamos sus extremos.
• Transladar polígonos:
– Transladamos véstices y redibujamos.
x′ = x + tx
y'= y + ty
P = (x,y) ′ P = ( ′ x , ′ y ) T = (tx,ty )
′ P = P + T
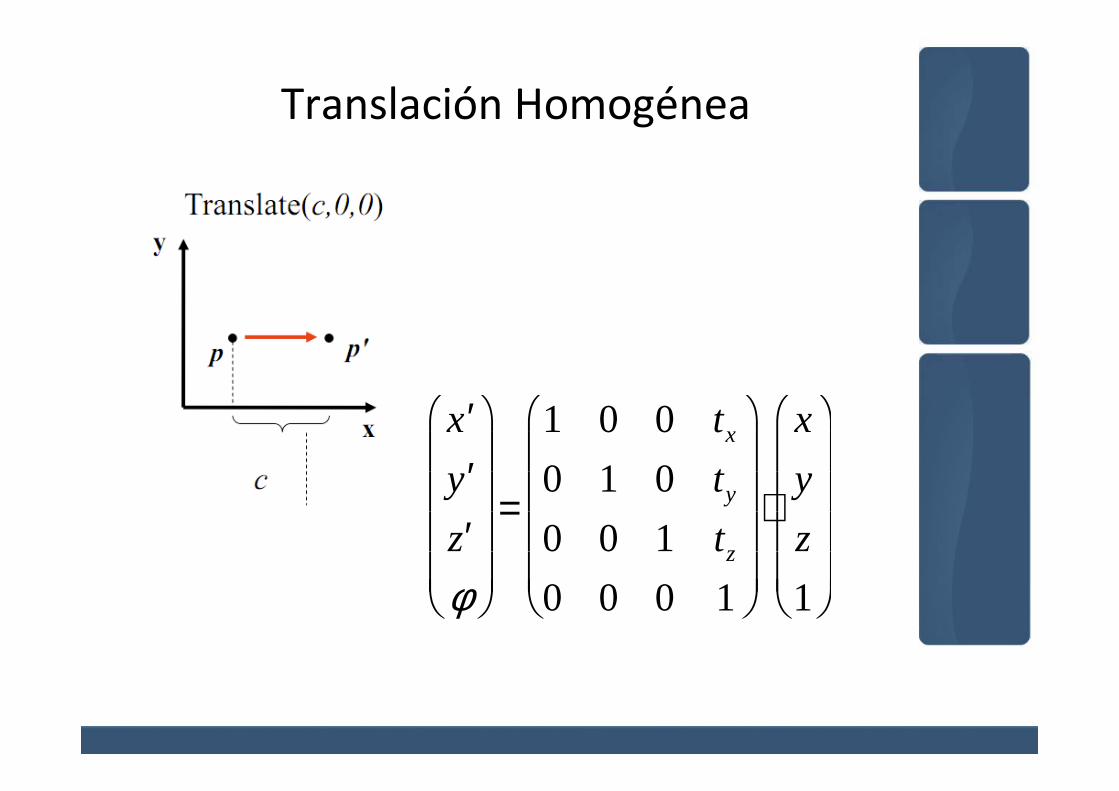
Translación Homogénea
′ x
′ y
′ z
φ
=
1 0 0 tx
0 1 0 ty
0 0 1 tz
0 0 0 1
⋅
x
y
z
1
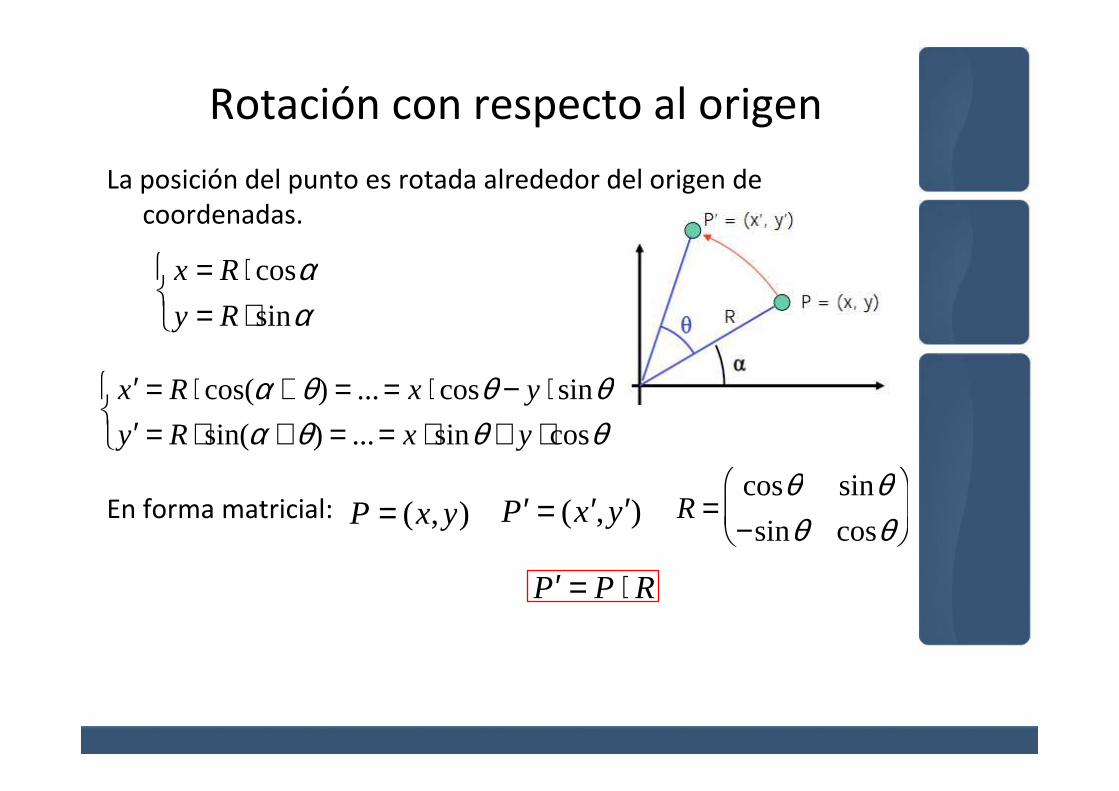
Rotación con respecto al origen
La posición del punto es rotada alrededor del origen de
coordenadas.
En forma matricial:
x = R ⋅ cosαy = R ⋅ sinα
P = (x,y) ′ P = ( ′ x , ′ y ) R =cosθ sinθ−sinθ cosθ
′ x = R ⋅ cos(α + θ) = ...= x ⋅ cosθ − y ⋅ sinθ′ y = R ⋅ sin(α + θ) = ...= x ⋅ sinθ + y ⋅ cosθ
′ P = P ⋅ R
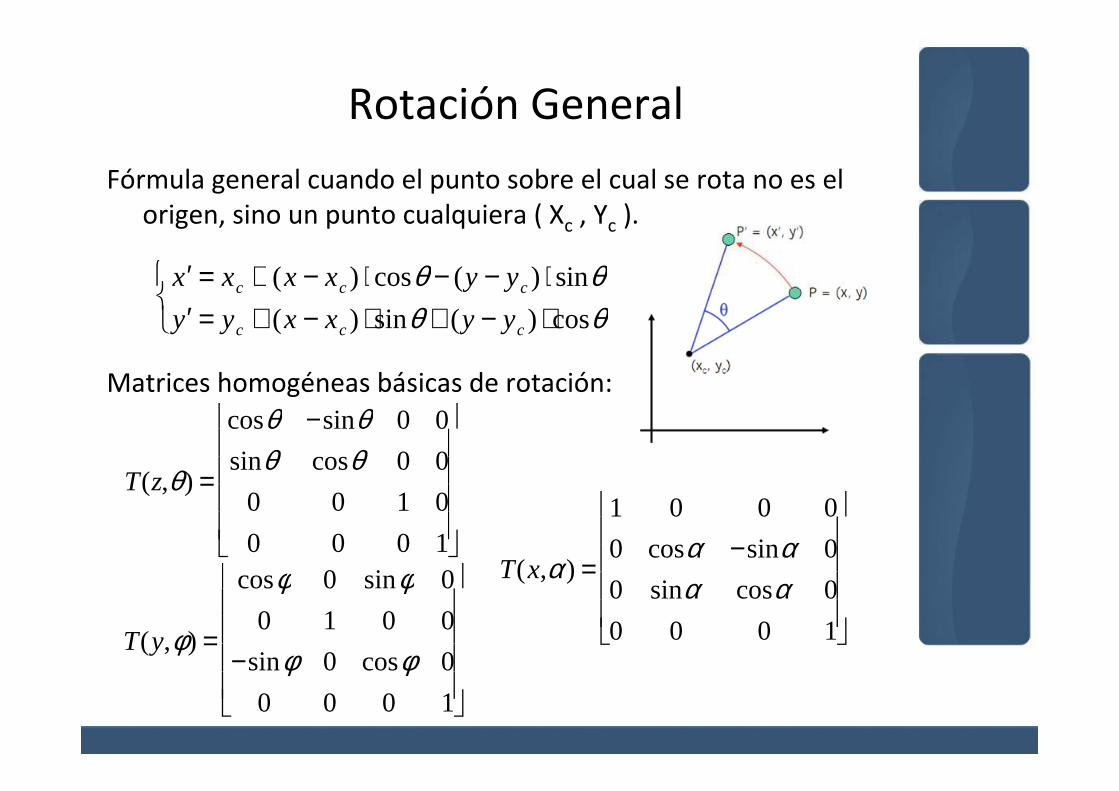
Rotación General
Fórmula general cuando el punto sobre el cual se rota no es el
origen, sino un punto cualquiera ( Xc , Yc ).
Matrices homogéneas básicas de rotación:
′ x = xc + (x − xc ) ⋅ cosθ − (y − yc ) ⋅ sinθ′ y = yc + (x − xc ) ⋅ sinθ + (y − yc ) ⋅ cosθ
T(x,α) =
1 0 0 0
0 cosα −sinα 0
0 sinα cosα 0
0 0 0 1
T(y,φ) =
cosφ 0 sinφ 0
0 1 0 0
−sinφ 0 cosφ 0
0 0 0 1
T(z,θ) =
cosθ −sinθ 0 0
sinθ cosθ 0 0
0 0 1 0
0 0 0 1
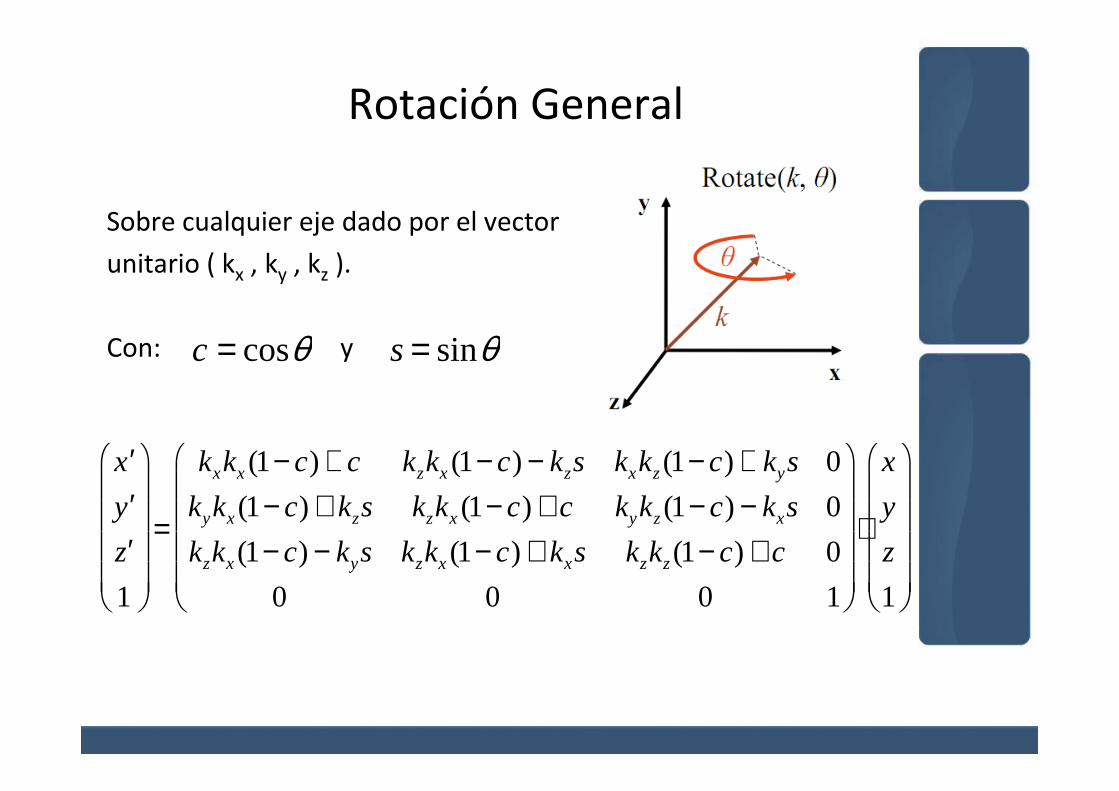
Rotación General
Sobre cualquier eje dado por el vector
unitario ( kx , ky , kz ).
Con: y c = cosθ s = sinθ
′ x
′ y
′ z
1
=
kxkx (1− c) + c kzkx (1− c) − kzs kxkz (1− c) + kys 0
kykx (1− c) + kzs kzkx (1− c) + c kykz (1− c) − kxs 0
kzkx (1− c) − kys kzkx (1− c) + kxs kzkz(1− c) + c 0
0 0 0 1
⋅
x
y
z
1
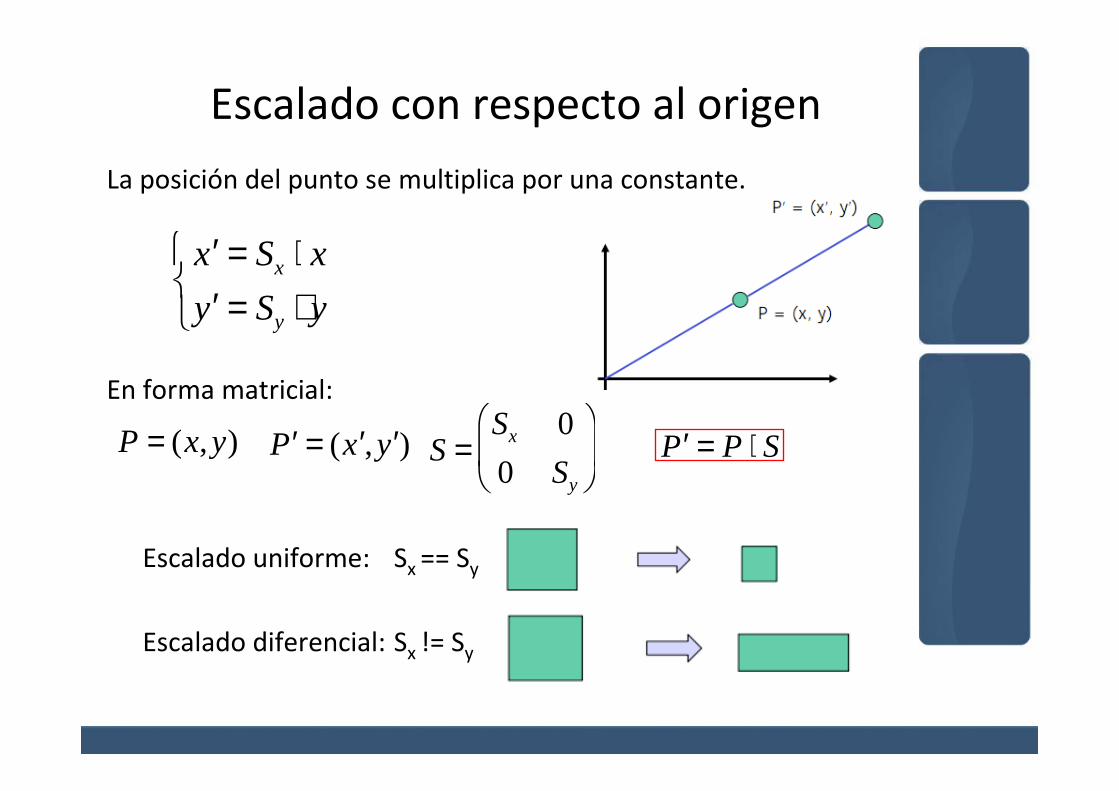
Escalado con respecto al origen
La posición del punto se multiplica por una constante.
En forma matricial:
Escalado uniforme: Sx == Sy
Escalado diferencial: Sx != Sy
P = (x,y) ′ P = ( ′ x , ′ y )
′ x = Sx ⋅ x
′ y = Sy ⋅ y
S =Sx 0
0 Sy
′ P = P ⋅ S
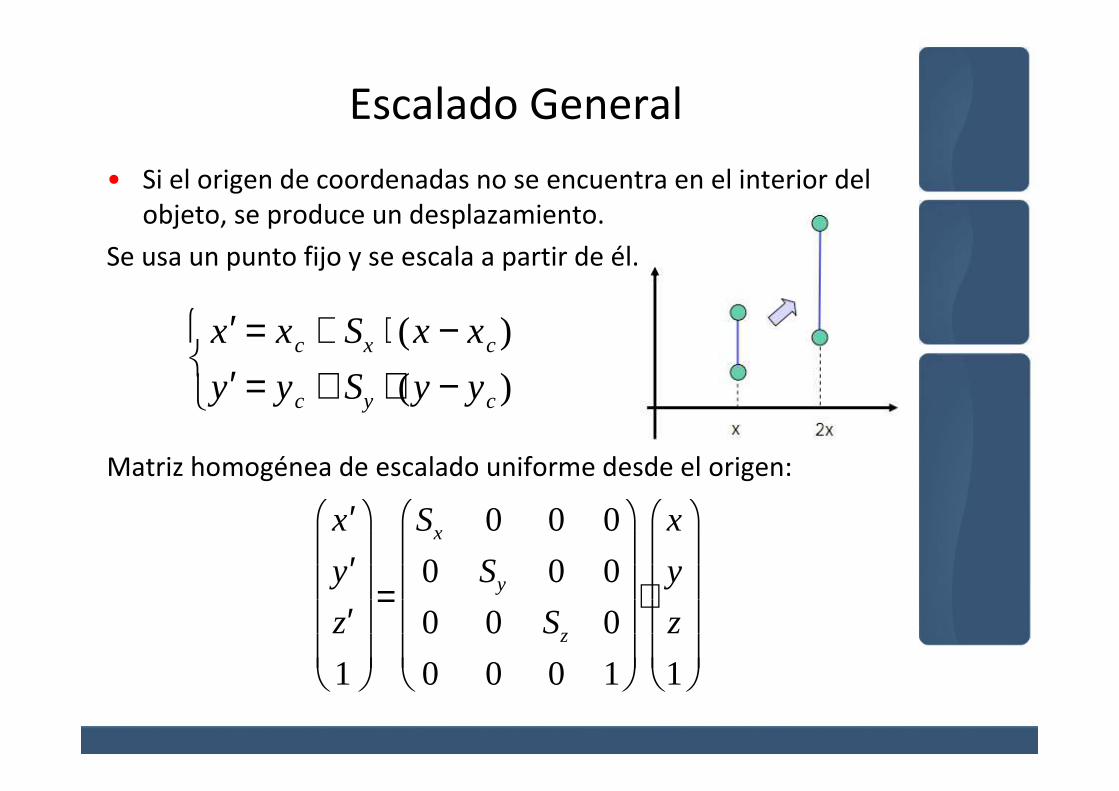
Escalado General
• Si el origen de coordenadas no se encuentra en el interior del
objeto, se produce un desplazamiento.
Se usa un punto fijo y se escala a partir de él.
Matriz homogénea de escalado uniforme desde el origen:
′ x = xc + Sx ⋅ (x − xc )
′ y = yc + Sy ⋅ (y − yc )
′ x
′ y
′ z
1
=
Sx 0 0 0
0 Sy 0 0
0 0 Sz 0
0 0 0 1
⋅
x
y
z
1
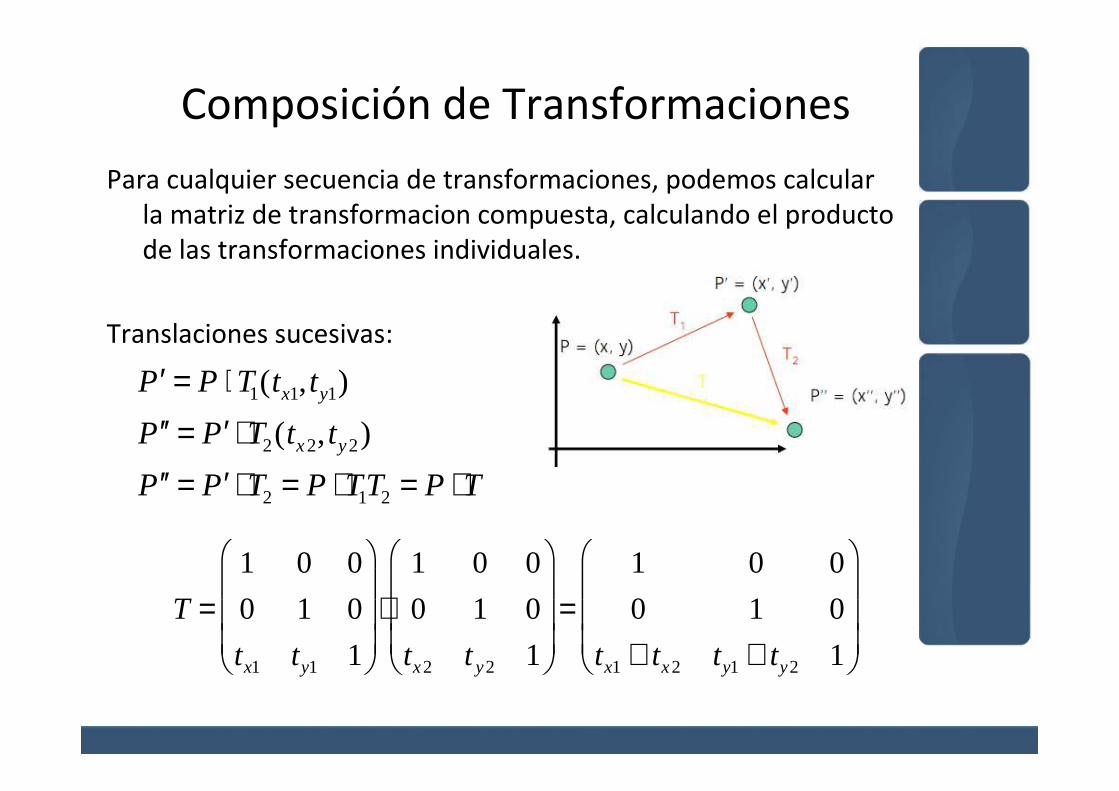
Composición de Transformaciones
Para cualquier secuencia de transformaciones, podemos calcular
la matriz de transformacion compuesta, calculando el producto
de las transformaciones individuales.
Translaciones sucesivas:
′ P = P ⋅ T1(tx1,ty1)
′ ′ P = ′ P ⋅ T2(tx2,ty2)
′ ′ P = ′ P ⋅ T2 = P ⋅ T1T2 = P ⋅ T
T =1 0 0
0 1 0
tx1 ty1 1
⋅1 0 0
0 1 0
tx2 t y2 1
=1 0 0
0 1 0
tx1 + tx2 ty1 + ty2 1
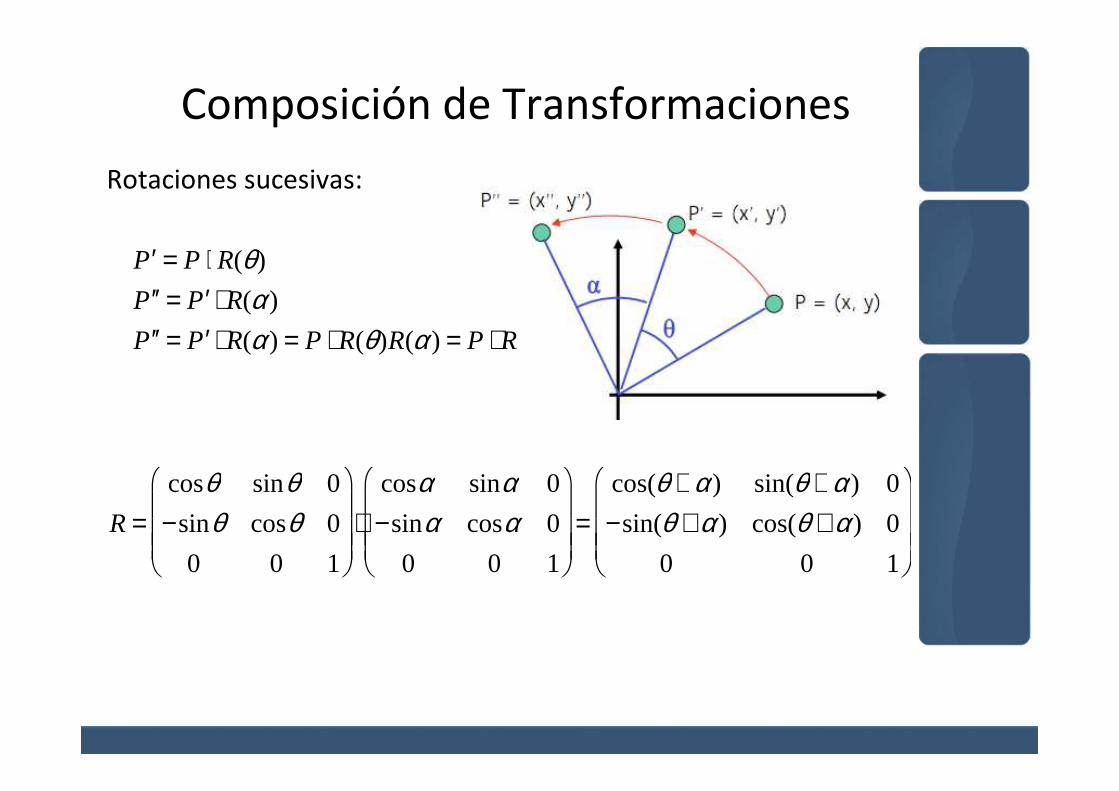
Composición de Transformaciones
Rotaciones sucesivas:
′ P = P ⋅ R(θ)
′ ′ P = ′ P ⋅ R(α)
′ ′ P = ′ P ⋅ R(α) = P ⋅ R(θ)R(α) = P ⋅ R
R =cosθ sinθ 0
−sinθ cosθ 0
0 0 1
⋅
cosα sinα 0
−sinα cosα 0
0 0 1
=cos(θ + α) sin(θ + α) 0
−sin(θ + α) cos(θ + α) 0
0 0 1
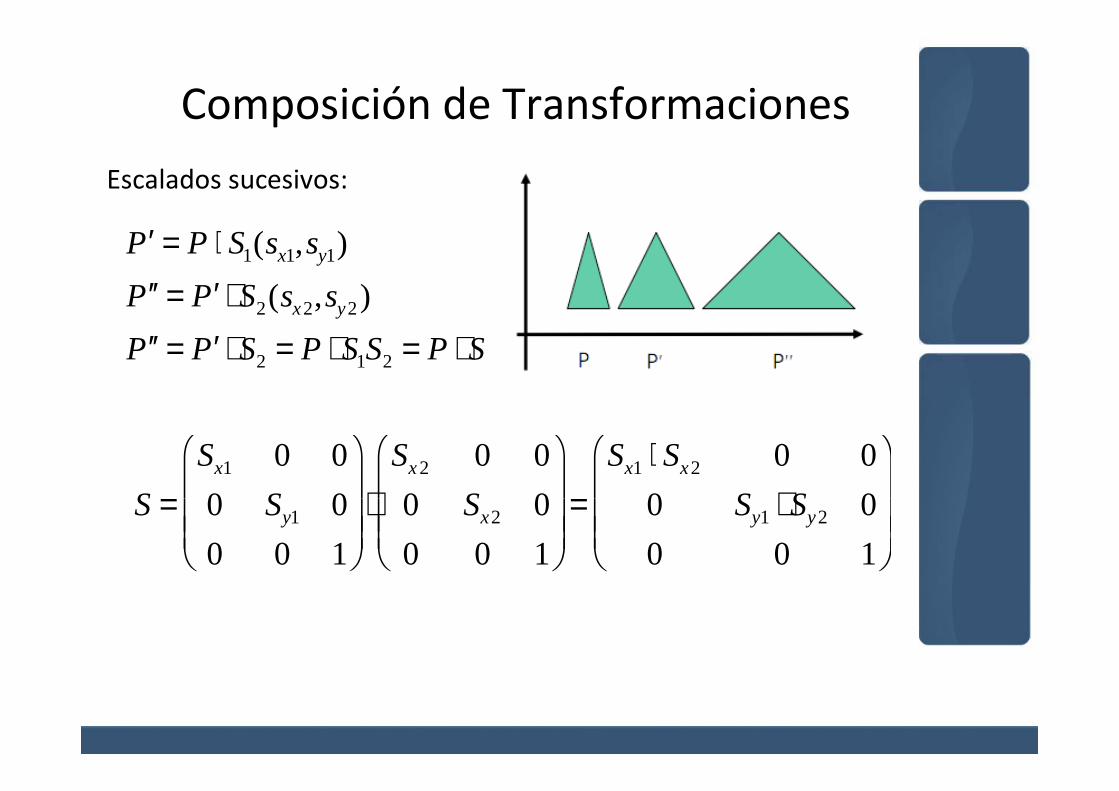
Composición de Transformaciones
Escalados sucesivos:
′ P = P ⋅ S1(sx1,sy1)
′ ′ P = ′ P ⋅ S2(sx2,sy2)
′ ′ P = ′ P ⋅ S2 = P ⋅ S1S2 = P ⋅ S
S =Sx1 0 0
0 Sy1 0
0 0 1
⋅
Sx2 0 0
0 Sx2 0
0 0 1
=Sx1 ⋅ Sx2 0 0
0 Sy1 ⋅ Sy2 0
0 0 1
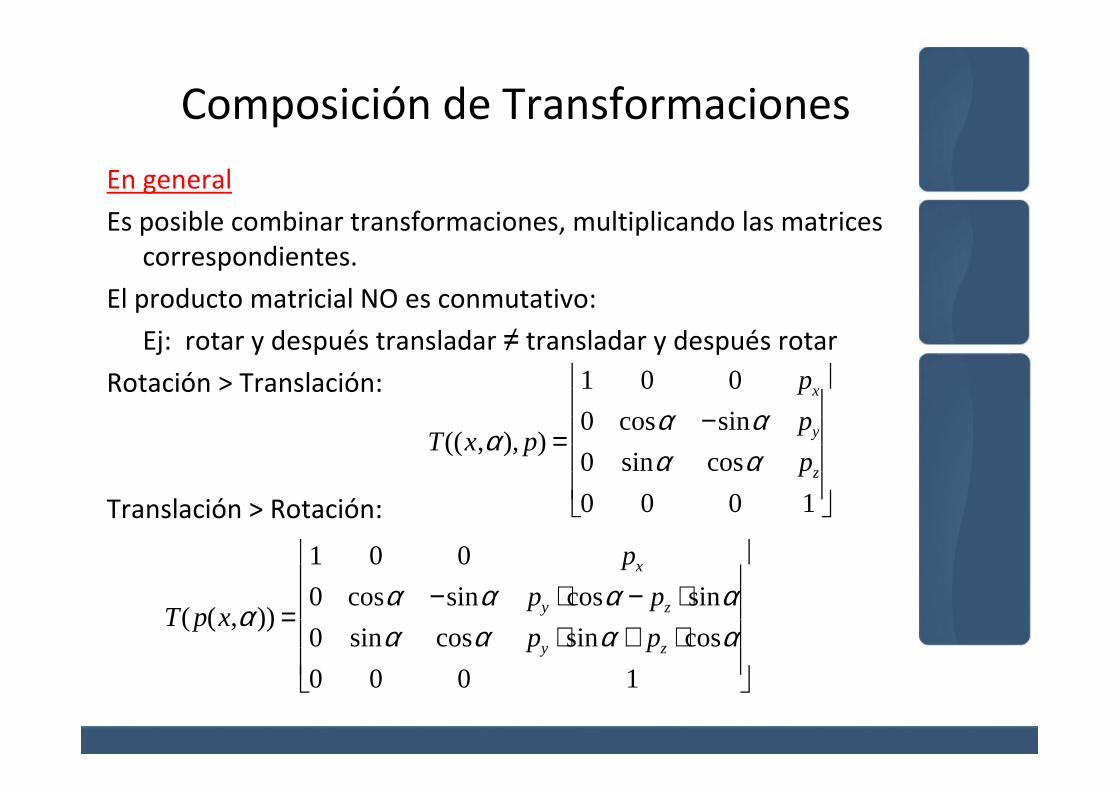
Composición de Transformaciones
En general
Es posible combinar transformaciones, multiplicando las matrices
correspondientes.
El producto matricial NO es conmutativo:
Ej: rotar y después transladar ≠ transladar y después rotar
Rotación > Translación:
Translación > Rotación:
T((x,α), p) =
1 0 0 px
0 cosα −sinα py
0 sinα cosα pz
0 0 0 1
T(p(x,α)) =
1 0 0 px
0 cosα −sinα py ⋅ cosα − pz ⋅ sinα0 sinα cosα py ⋅ sinα + pz ⋅ cosα0 0 0 1
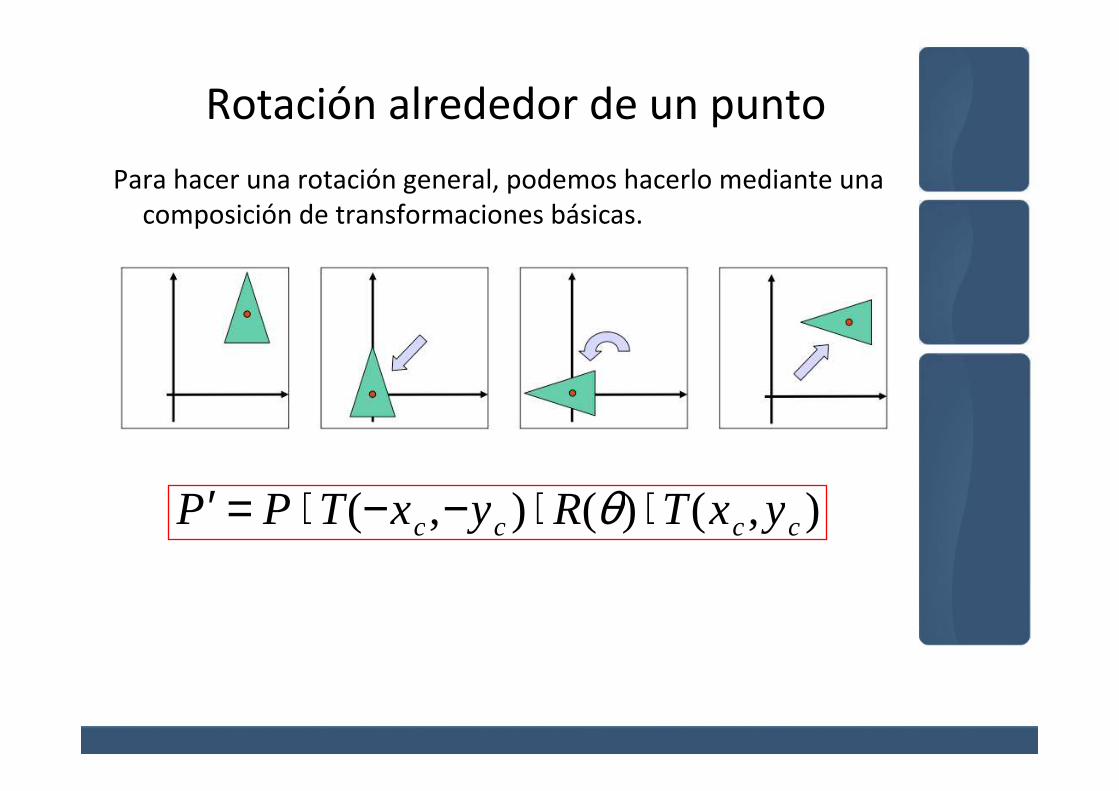
Rotación alrededor de un punto
Para hacer una rotación general, podemos hacerlo mediante una
composición de transformaciones básicas.
′ P = P ⋅ T(−xc,−yc ) ⋅ R(θ) ⋅ T(xc,yc )
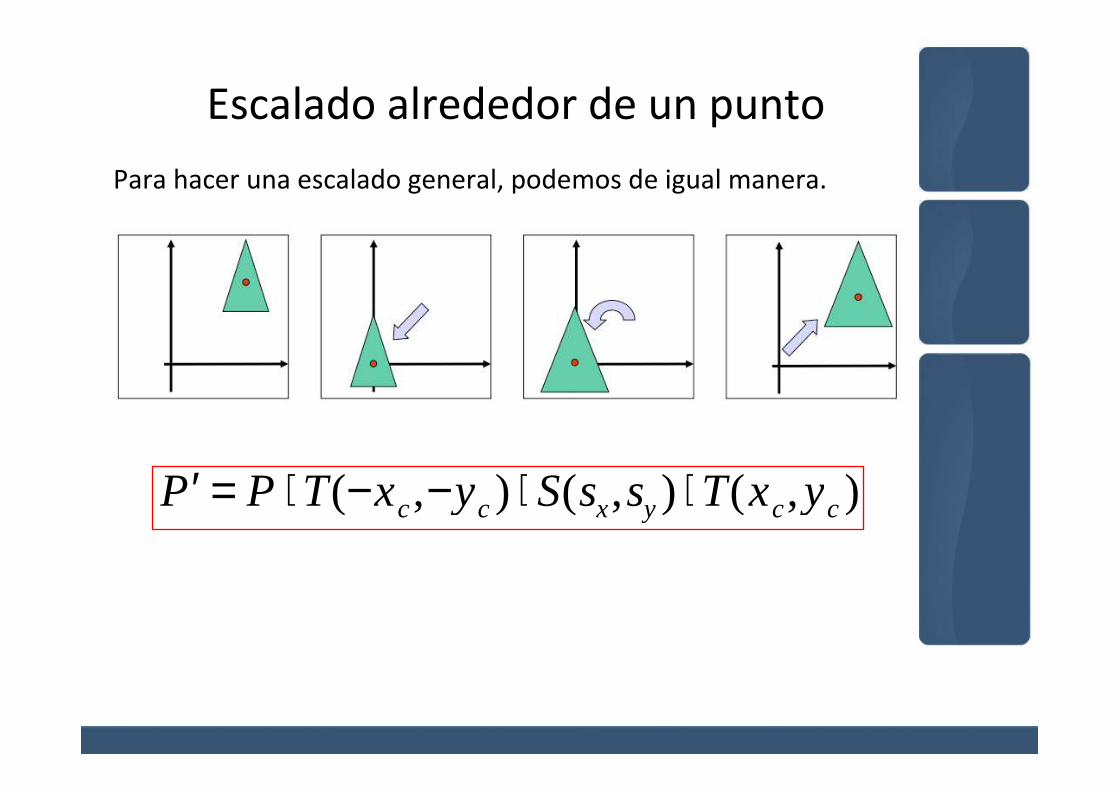
Escalado alrededor de un punto
Para hacer una escalado general, podemos de igual manera.
′ P = P ⋅ T(−xc,−yc ) ⋅ S(sx,sy ) ⋅ T(xc,yc )
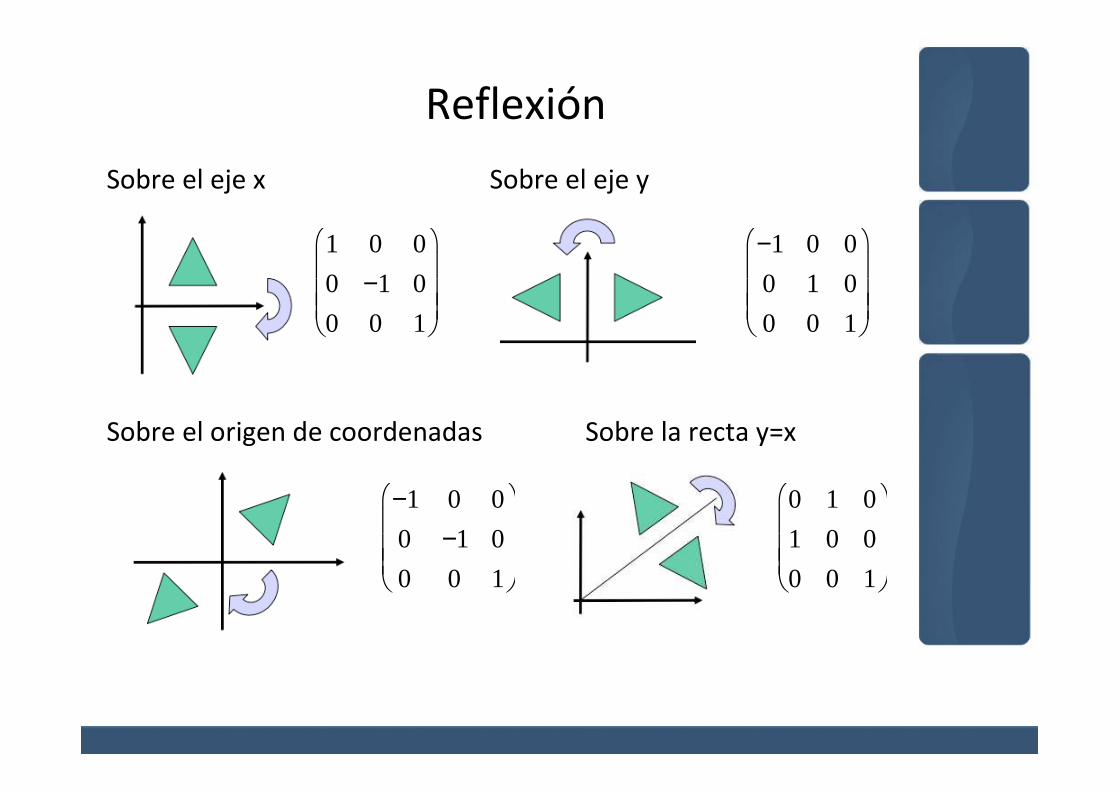
Sobre el eje x Sobre el eje y
Sobre el origen de coordenadas Sobre la recta y=x
Reflexión
1 0 0
0 −1 0
0 0 1
−1 0 0
0 1 0
0 0 1
−1 0 0
0 −1 0
0 0 1
0 1 0
1 0 0
0 0 1
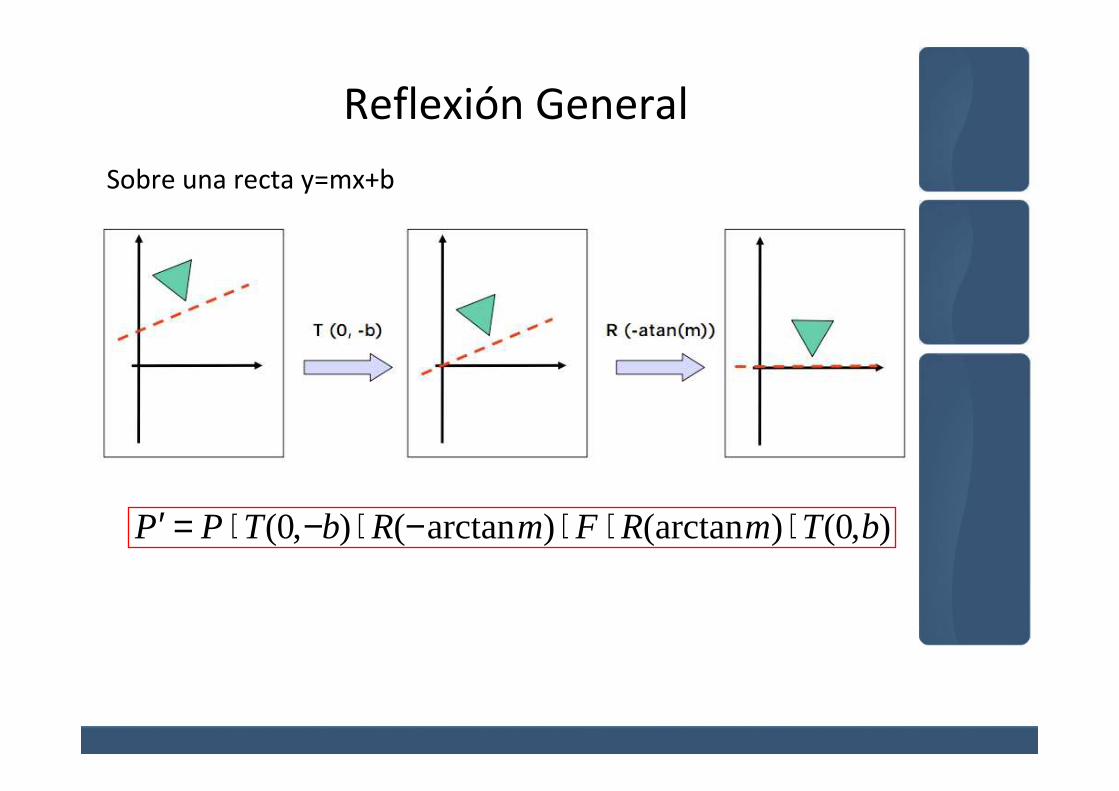
Sobre una recta y=mx+b
Reflexión General
′ P = P ⋅ T(0,−b) ⋅ R(−arctanm) ⋅ F ⋅ R(arctanm) ⋅ T(0,b)
Matrices de Transformación (OpenGL)
Inicialización:
• glMatrixMode(GL_MODELVIEW);
– Para activar la matriz de transformación
• glLoadIdentity( );
– Para cargar la identidad y así poder hacer todas las transformaciones
Transformaciones:
• glScalef(GLfloat sx, GLfloat sy, GLfloat sz);
– Escalar según los factores sx, sy y sz
• glTranslatef(GLfloat tx, GLfloat ty, GLfloat tz);
– Transladar según los factores tx, ty y tz
• glRotatef(GLfloat angulo, GLfloat vx, GLfloat vy, Glfloat vz);
– Rotar angulo según el eje que define el vector (vx, vy, vz)
Matrices de Transformación (OpenGL)
Ejemplo:
Display( ){
…
glMatrixMode(GL_MODELVIEW);
glLoadIdentity( );
glTranslatef(0.0, 0.0, -5.0);
glRotatef(45.0, 0.0, 0.0);
glScalef(2.0, 2.0, 2.0);
DrawCube( );
…
}
Matrices de Transformación (OpenGL)
OpenGL permite guardar el estado de la matriz para luego volver a
utilizarlo de la siguiente manera:
• glPushMatrix( );
– Salva el estado actual de la matriz
• glPopMatrix( );
– Recupera el estado de la matriz
Matrices de Transformación (OpenGL)
transform robot
glPushMatrix( );
transform head
draw head
glPopMatrix( );
glPushMatrix( );
transformbody
glPushMatrix( );
transform left-arm
draw left-arm
glPopMatrix( );
glPushMatrix( );
transform right-arm
draw right-arm
glPopMatrix( );
draw body
glPopMatrix( );
Ejemplo:Robot simple con cabeza,Cuerpo y brazos.
Bibliografía
Para la realización de esta presentación se utilizaron las siguientes
fuentes:
• Prof. Eduardo Fernández de la Facultad de Ing. de la
Universidad de la República, Montevideo, Uruguay.
• Clases del Departamento de Arquitectura y Tecnología de
Computadores, Universidad de Sevilla, España.
• Prof. Alexandra La Cruz de la Universidad Simón Bolívar.
• OpenGL Programming Guide.