control y robótica 4º eso
TRANSCRIPT


¿Qué es un robot?• Un robot es una máquina controlada por ordenador y
programada para moverse, manipular objetos y realizar trabajos a la vez que interacciona con su entorno.
• Su objetivo principal es el de sustituir al ser humano en tareas repetitivas, difíciles, desagradables e incluso peligrosas de una forma más segura, rápida y precisa.
denis

• Los robots exhiben tres elementos claves según la definición adoptada:
• Programabilidad: lo que significa disponer de capacidades computacionales y de manipulación de símbolos.
• Capacidad mecánica: que lo capacita para realizar acciones en su entorno y no ser un mero procesador de datos.
• Flexibilidad: puesto que el robot puede operar según un amplio rango de programas y manipular material de formas distintas.
denis


ORDENADOR EXTERNO
Ejecuta una capa de software de control jerarquizado desde el más bajo nivel (envío de
órdenes simples de posicionado de servos particulares) hasta el más complejo (planificación de trayectorias de todas las articulaciones para
que el robot ande). lucia
INTERFACES DE ENTRADA/SALIDAS
Permiten conducir las órdenes desde el ordenador hasta la placa controladora del robot. Proporcionan las señales de reloj apropiadas para que ésta última funcione
correctamente.lucia

TARJETA CONTROLADORASituada sobre el robot, genera las
señales de posicionamiento de los servos (y las mantiene) a partir de los datos
numéricos enviados desde el ordenador. angela

ROBOT
Los servos actúan de acuerdo con las señales de la controladora, movilizando la
estructura. angela

¿Qué es un servo (motor)?• Motor auxiliar para aumentar
automáticamente la energía disponible cuando conviene. angela


Sensor proximidad y temperatura
• Sensor de proximidad: Detecta la presencia de un objeto de tipo metálico o de otro tipo.
• Sensor de temperatura: Capta la temperatura del ambiente, de un objeto o de un punto determinado. denis

Sensores magnéticos (brújula digital) y táctiles, piel robótica
• Sensor magnéticos (brújula digital) :Capta la variación de campos magnéticos. Entre sus aplicaciones está la orientación de robots autónomos, exploradores, etc.
denis• Sensor táctiles y piel
robótica: Sirven para detectar la forma y el tamaño de los objetos que el robot manipula.

Sensores de iluminación y de velocidad, de vibración y de inclinación
• Sensores de iluminación: Capta la intensidad luminosa, el color de los objetos. Es muy útil para la identificación de objetos. Es parte de la visión artificial y en numerosas ocasiones son cámaras.
• Sensores de velocidad, de vibración y de inclinación: Se emplean para determinar la velocidad de actuación de las distintas partes móviles del propio robot o cuando se produce una vibración. lucia

Sensores de presión ,de sonido y de microinterruptores
• Sensores de presión: permiten controlar la presión que ejerce la mano del robot al coger un objeto
• Sensores de sonido: Se trata de un micrófono con el que poder oír los sonidos. lucia
• Sensores de microinterruptores: Se trata de múltiples interruptores y finales de carrera muy utilizados.


¿Qué es?• Son los encargados de realizar
movimientos o cualquier tipo de actuación sobre el robot o sus herramientas.
• Los actuadores suelen ser de tres tipos, eléctricos, neumáticos o hidráulicos.
• angela
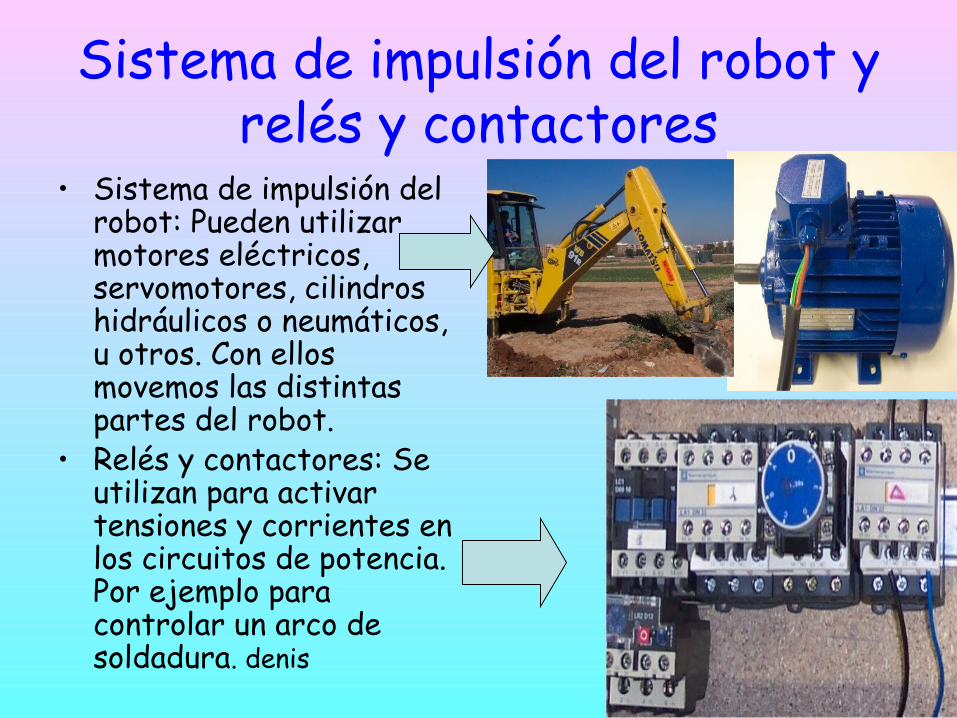
Sistema de impulsión del robot y relés y contactores
• Sistema de impulsión del robot: Pueden utilizar motores eléctricos, servomotores, cilindros hidráulicos o neumáticos, u otros. Con ellos movemos las distintas partes del robot.
• Relés y contactores: Se utilizan para activar tensiones y corrientes en los circuitos de potencia. Por ejemplo para controlar un arco de soldadura. denis
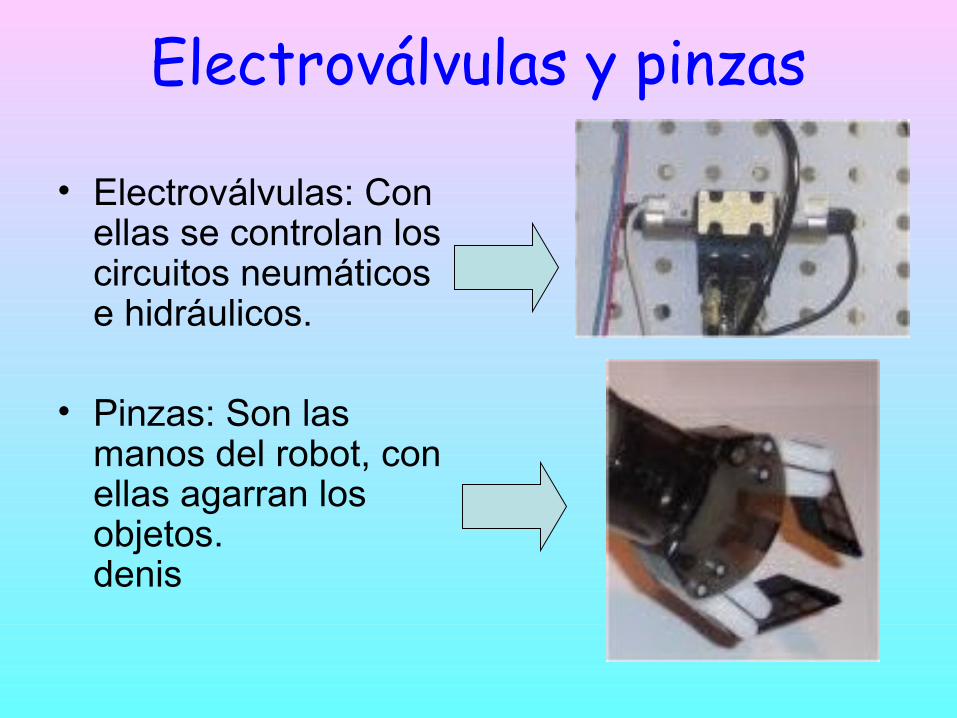
Electroválvulas y pinzas
• Electroválvulas: Con ellas se controlan los circuitos neumáticos e hidráulicos.
• Pinzas: Son las manos del robot, con ellas agarran los objetos.denis


• Un sistema automático puede controlar desde la alarma de un despertador hasta el lanzamiento de una nave espacial. Generalmente, los sistemas de control se componen de un dispositivo de entrada, una unidad de control y un dispositivo de salida.lucia

Sistema de control
• Entendemos como un sistema de control a la combinación de componentes que actúan juntos para realizar el control de un proceso.
• Este control se puede hacer de forma continua, es decir en todo momento o de forma discreta, es decir cada cierto tiempo.
• Cuando el sistema es continuo, el control se realiza con elementos continuos.
• Cuando el sistema es discreto, el control se realiza con elementos digitales como el ordenador.
• En cualquier caso existen dos tipos de sistemas, sistemas en lazo abierto y sistemas en lazo cerrado. lucia

Sistema en lazo abierto (equipo de sonido de música)
• Son aquellos en los que la salida no tiene influencia sobre la señal de entrada.
• Cuando nosotros variamos el potenciómetro de volumen, varia la cantidad de potencia que entrega el altavoz, pero el sistema no sabe si se ha producido la variación que deseamos o no.
• angela

Sistemas en lazo cerrado (llenado de agua de la cisterna)
• Son aquellos en los que la salida influye sobre la señal de entrada.
• El control se realiza sobre el nivel de agua que debe contener la cisterna.
• Entrada de agua, controlador (válvula),nudo comparador (lo realiza tanto la válvula como el pivote y la palanca de la varilla), la realimentación (el flotador junto con la varilla y la palanca) y la salida de agua (que hace subir el nivel del agua) angela

Diseño y construcción de un robot
• El proceso de construcción es lento y complejo. Hay que tener en cuenta los materiales, herramientas, procesos, limitaciones y coste.
• La fase de diseño es una de las más desafiantes de todo el proceso. El primer paso es hacer un boceto sobre papel. Esto nos permite sacar nuestra parte más creativa. Este boceto debe ser detallado para poderlo pasar Esta fase también permite el testeo del producto en el ordenador. angela
Componentes y uso de un robot• Soldadura: El robot puede soldar
ahorrándole al operario el peligro de las altas temperaturas y los vapores tóxicos que se desprenden en el proceso.
• Aplicación de pintura, esmalte y adhesivos: Es un trabajo repetitivo adecuado para que lo haga una máquina en el que además se suele trabajar con productos tóxicos.
• Operaciones de corte: tornos, fresadoras, taladrados, pulidos, etc. Las máquinas de control numérico permiten llevar a cabo estas operaciones con la máxima precisión y sin riesgo.denis

• Plantas nucleares: Los robots pueden trabajar en las zonas sometidas a radiaciones.
• Movimiento de piezas: Los robots se encargan de colocar las piezas o los materiales en plataformas, de suministrárselas a las máquinas o de extraer de estas últimas los productos terminados.
• Montaje y ensamblado: Son robots quienes se encargan de piezas muy pequeñas necesitadas de una gran precisión, como pueden ser los componentes eléctricos o electrónicos. lucia

DENIS, ÁNGELA Y LUCÍA