control units cu240s - cache.industry.siemens.com · consignas de seguridad este manual contiene...
TRANSCRIPT

s
SINAMICSG120G120
Control Unit
CU240SCU240S DP
CU240S DP-F
Versión del software 2.0
Instrucciones de servicio (resumen) · Edición 04/2006

Nota Estas instrucciones resumidas contienen la información más importante para poner en marcha el convertidor y poder usarlo. También sirven para hacer una puesta en servicio rápida en aplicaciones estándar. En las instrucciones de servicio y en la lista de parámetros encontrará más información en inglés y en alemán.
Montaje empotrado/adosado 1
Puesta en marcha por software
2
Funcionamiento 3
Servicio y mantenimiento 4
Eliminación de fallos/preguntas más frecuentes
5
SINAMICS
SINAMICS G120 Control Units CU240S
Instrucciones de servicio (resumen)
2006-04-04 A5E00807487E AA
Edición 04/2006, versión de software V2.0
Consignas de seguridad Este manual contiene las informaciones necesarias para la seguridad personal así como para la prevención de daños materiales. Las informaciones para su seguridad personal están resaltadas con un triángulo de advertencia; las informaciones para evitar únicamente daños materiales no llevan dicho triángulo. De acuerdo al grado de peligro las consignas se representan, de mayor a menor peligro, como sigue.
Peligro
Significa que, si no se adoptan las medidas preventivas adecuadas se producirá la muerte, o bien lesiones corporales graves.
Advertencia
Significa que, si no se adoptan las medidas preventivas adecuadas puede producirse la muerte o bien lesiones corporales graves.
Precaución
con triángulo de advertencia significa que si no se adoptan las medidas preventivas adecuadas, pueden producirse lesiones corporales.
Precaución
sin triángulo de advertencia significa que si no se adoptan las medidas preventivas adecuadas, pueden producirse daños materiales.
Atención
significa que puede producirse un resultado o estado no deseado si no se respeta la consigna de seguridad correspondiente.
Si se dan varios niveles de peligro se usa siempre la consigna de seguridad más estricta en cada caso. Si en una consigna de seguridad con triángulo de advertencia se alarma de posibles daños personales, la misma consigna puede contener también una advertencia sobre posibles daños materiales.
Personal cualificado El equipo/sistema correspondiente sólo deberá instalarse y operarse respetando lo especificado en este documento. Sólo está autorizado a intervenir en este equipo el personal cualificado. En el sentido del manual se trata de personas que disponen de los conocimientos técnicos necesarios para poner en funcionamiento, conectar a tierra y marcar los aparatos, sistemas y circuitos de acuerdo con las normas estándar de seguridad.
Uso conforme Considere lo siguiente:
Advertencia
El equipo o los componentes del sistema sólo se podrán utilizar para los casos de aplicación previstos en el catálogo y en la descripción técnica, y sóloassociado a los equipos y componentes de Siemens y de tercera que han sido recomendados y homologados por Siemens. El funcionamiento correcto y seguro del producto presupone un transporte, un almacenamiento, una instalación y un montaje conforme a las prácticas de la buena ingeniería, así como un manejo y un mantenimiento rigurosos.
Marcas registradas Todos los nombres marcados con ® son marcas registradas de Siemens AG. Los restantes nombres y designaciones contenidos en el presente documento pueden ser marcas registradas cuya utilización por terceros para sus propios fines puede violar los derechos de sus titulares.
Exención de responsabilidad Hemos comprobado la concordancia del contenido de esta publicación con el hardware y el software descritos. Sin embargo, como es imposible excluir desviaciones, no podemos hacernos responsable de la plena concordancia. El contenido de esta publicación se revisa periódicamente; si es necesario, las posibles las correcciones se incluyen en la siguiente edición.
Siemens AG Automation and Drives Postfach 48 48 90437 NÜRNBERG ALEMANIA
Referencia A5E00807487E AA Edición 04/2006
Copyright © Siemens AG 2006. Sujeto a cambios sin previo aviso

Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA iii
Índice 1 Montaje empotrado/adosado .................................................................................................................. 1-1
1.1 Colocar la CU en el PM ............................................................................................................. 1-2 1.2 Conectar la Control Unit por medio de bornes .......................................................................... 1-3 1.2.1 Información general sobre los bornes de mando ...................................................................... 1-3 1.2.2 Instalar la Control Unit por medio de bornes ............................................................................. 1-4 1.2.3 Cableado de mando de una Control Unit CU240S con ajuste predeterminado........................ 1-5 1.2.4 Cableado de mando con entrada de tensión............................................................................. 1-7 1.2.5 Cableado de mando con entrada de corriente .......................................................................... 1-8 1.3 Montaje de la interfaz de encóder ........................................................................................... 1-10
2 Puesta en marcha por software .............................................................................................................. 2-1 2.1 Información general para la puesta en marcha ......................................................................... 2-1 2.2 Parámetros................................................................................................................................. 2-2 2.2.1 Resumen de parámetros ........................................................................................................... 2-2 2.2.2 Parámetros aptos para escritura................................................................................................ 2-3 2.2.3 Parámetros de vigilancia............................................................................................................ 2-3 2.2.4 Atributos de parámetros............................................................................................................. 2-3 2.3 Ajustes de fábrica ...................................................................................................................... 2-9 2.4 Parametrización con el panel de mando (Operator Panel) ..................................................... 2-11 2.4.1 Manejo del panel de mando (OP)............................................................................................ 2-11 2.4.2 Teclas de función del OP......................................................................................................... 2-12 2.4.3 Modificación de parámetros con el OP.................................................................................... 2-13 2.5 Parametrización con MMC....................................................................................................... 2-14 2.6 Parametrización con STARTER .............................................................................................. 2-14 2.6.1 Puesta en marcha con STARTER ........................................................................................... 2-14 2.7 Modos de puesta en marcha ................................................................................................... 2-16 2.7.1 Sinopsis de la puesta en marcha............................................................................................. 2-16 2.7.2 Puesta en marcha rápida......................................................................................................... 2-18 2.7.3 Puesta en marcha rápida - Diagrama de flujo ......................................................................... 2-19 2.7.4 Cálculo de los datos del motor y del regulador........................................................................ 2-24 2.7.5 Cálculo de los datos del motor y del regulador - Tabla de secuencia operacional ................. 2-25 2.7.6 Lectura de los datos del motor................................................................................................. 2-26 2.7.7 Rutina de lectura de datos del motor - Tabla de secuencia operacional ................................ 2-29 2.7.8 Puesta en marcha de la aplicación.......................................................................................... 2-30 2.7.8.1 Puesta en marcha de la aplicación.......................................................................................... 2-30 2.7.8.2 Tabla de secuencia operacional - Ajustes generales .............................................................. 2-31 2.7.8.3 Tabla de secuencia operacional - Encóder de impulsos ......................................................... 2-31 2.7.8.4 Tabla de secuencia operacional - Sensor de temperatura...................................................... 2-32 2.7.8.5 Tabla de secuencia operacional - Fuente de señales de mando............................................ 2-32 2.7.8.6 Tabla de secuencia operacional - Funciones de las salidas digitales..................................... 2-34 2.7.8.7 Tabla de secuencia operacional - Consigna de la frecuencia ................................................. 2-34 2.7.8.8 Tabla de secuencia operacional - Salidas analógicas............................................................. 2-37 2.7.8.9 Tabla de secuencia operacional - Frecuencia JOG................................................................. 2-38

Índice
Control Units CU240S iv Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8.10 Tabla de secuencia operacional - Consignas adicionales....................................................... 2-38 2.7.8.11 Tabla de secuencia operacional - Frecuencia inhibida............................................................ 2-39 2.7.8.12 Tabla de secuencia operacional - Tiempos de rampa y redondeo.......................................... 2-39 2.7.8.13 Tabla de secuencia operacional - Fin de los ajustes de la aplicación..................................... 2-40 2.7.9 Puesta en marcha en serie ...................................................................................................... 2-41 2.7.9.1 Puesta en marcha en serie ...................................................................................................... 2-41 2.7.9.2 Puesta en marcha en serie con el OP ..................................................................................... 2-43 2.7.9.3 Puesta en marcha en serie con STARTER ............................................................................. 2-45 2.7.9.4 Insertar y extraer la MMC......................................................................................................... 2-47 2.7.9.5 Puesta en marcha en serie con MMC...................................................................................... 2-48 2.7.10 Restablecer los ajustes de fábrica de los parámetros ............................................................. 2-53 2.7.11 Restablecer los ajustes de fábrica de los parámetros - Tabla de secuencia operacional....... 2-54 2.8 Puesta en marcha del encóder ................................................................................................ 2-55 2.8.1 Puesta en marcha de la interfaz de encóder ........................................................................... 2-55 2.8.2 Parametrización de la interfaz del encóder.............................................................................. 2-57 2.8.3 Claves numéricas para los fallos del encóder ......................................................................... 2-60
3 Funcionamiento ...................................................................................................................................... 3-1 3.1 Comportamiento general de funcionamiento ............................................................................. 3-1 3.2 Comportamiento de arranque .................................................................................................... 3-1 3.2.1 Comportamiento de arranque normal del convertidor ............................................................... 3-2 3.2.2 Comportamiento del convertidor en caso de cambio de una CU o un PM................................ 3-5 3.3 Carga y descarga de juego de parámetros................................................................................ 3-9
4 Servicio y mantenimiento........................................................................................................................ 4-1 4.1 Información sobre servicio técnico y soporte............................................................................. 4-1 4.2 Fallos y alarmas ......................................................................................................................... 4-3 4.3 Vista general de los LEDs.......................................................................................................... 4-4 4.4 Estado normal de los LED ......................................................................................................... 4-6 4.5 LEDs de estado de las funciones de seguridad ........................................................................ 4-7 4.6 Otras indicaciones de los LEDs ................................................................................................. 4-8 4.7 Eliminación de fallos con el OP ................................................................................................. 4-9
5 Eliminación de fallos/preguntas más frecuentes ..................................................................................... 5-1 Índice alfabético.............................................................................................................. Índice alfabético-1

Índice
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA v
Tablas
Tabla 1-1 Interfaz de encóder .................................................................................................................. 1-10 Tabla 1-2 Ejemplo de conexiones para encóder ..................................................................................... 1-11 Tabla 1-3 Ajustes de la tensión del encóder............................................................................................ 1-12 Tabla 2-1 Atributos de parámetros - BICO................................................................................................. 2-4 Tabla 2-2 Atributos de parámetros - Nivel de acceso................................................................................ 2-5 Tabla 2-3 Atributos de parámetros - Change state.................................................................................... 2-5 Tabla 2-4 Atributos de parámetros - Tipos de datos.................................................................................. 2-6 Tabla 2-5 Atributos de parámetros - Unidad.............................................................................................. 2-6 Tabla 2-6 Atributos de parámetros - División en grupos............................................................................ 2-7 Tabla 2-7 Atributos de parámetros - Activo................................................................................................ 2-7 Tabla 2-8 Atributos de parámetros - Puesta en marcha rápida................................................................. 2-8 Tabla 2-9 Atributos de parámetros - Margen de valores ........................................................................... 2-8 Tabla 2-10 Juegos de datos......................................................................................................................... 2-8 Tabla 2-11 Asignación predeterminada de las entradas digitales de una CU240S *)................................. 2-9 Tabla 2-12 Teclas del OP y sus funciones................................................................................................. 2-12 Tabla 2-13 Modificación de P0003 - Nivel de acceso a parámetros ......................................................... 2-13 Tabla 2-14 Modificación del parámetro de índice P0719 - Ajuste del control del OP ............................... 2-13 Tabla 2-15 Posibilidades de conexión para STARTER ............................................................................. 2-14 Tabla 2-16 Puesta en marcha rápida - Diagrama de flujo ......................................................................... 2-20 Tabla 2-17 Números de error para la descarga automática ...................................................................... 2-52 Tabla 2-18 Puesta en marcha del encóder................................................................................................ 2-55 Tabla 2-19 Ajustes de la tensión del encóder............................................................................................ 2-57 Tabla 2-20 Parámetros del encoder........................................................................................................... 2-57 Tabla 3-1 Números de error para la descarga automática ........................................................................ 3-4 Tabla 3-2 Números de error para la descarga automática ........................................................................ 3-8 Tabla 4-1 Indicación de estado .................................................................................................................. 4-6 Tabla 5-1 Números de alarma - Causas y posibles soluciones................................................................. 5-3 Tabla 5-2 Identificación del firmware de transmisión de datos.................................................................. 5-4 Tabla 5-3 Diagnóstico estándar ................................................................................................................. 5-4 Tabla 5-4 Números de fallo al acceder a parámetros................................................................................ 5-5


Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-1
Montaje empotrado/adosado 1Instalación de la Control Unit
La Control Unit permite al usuario acceder a todas las funciones del convertidor de frecuencia (variador).
Advertencia Si la instalación no se realiza correctamente, es posible que el convertidor se conecte de forma involuntaria. El convertidor sólo debe ser puesto en marcha por personas que estén cualificadas y capacitadas para instalar sistemas de este tipo.
Figura 1-1 Disposición general de una Control Unit CU240

Montaje empotrado/adosado 1.1 Colocar la CU en el PM
Control Units CU240S 1-2 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
1.1 Colocar la CU en el PM
Colocar la Control Unit en el Power Module La Control Unit se coloca en el Power Module tal y como se muestra en la figura inferior. Para retirarla, basta con presionar sobre la tecla de desbloqueo, situada en la parte superior del PM. El método de colocación de la Control Unit en el Power Module es siempre el mismo, sea cual sea la combinación de Control Unit y Power Module que se necesite.
Figura 1-2 Colocar la Control Unit en el Power Module
Precaución Antes de conectar la Control Unit al Power Module durante el funcionamiento (hot swap), conectar la alimentación de 24 V a los terminales.
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-3
1.2 Conectar la Control Unit por medio de bornes
1.2.1 Información general sobre los bornes de mando
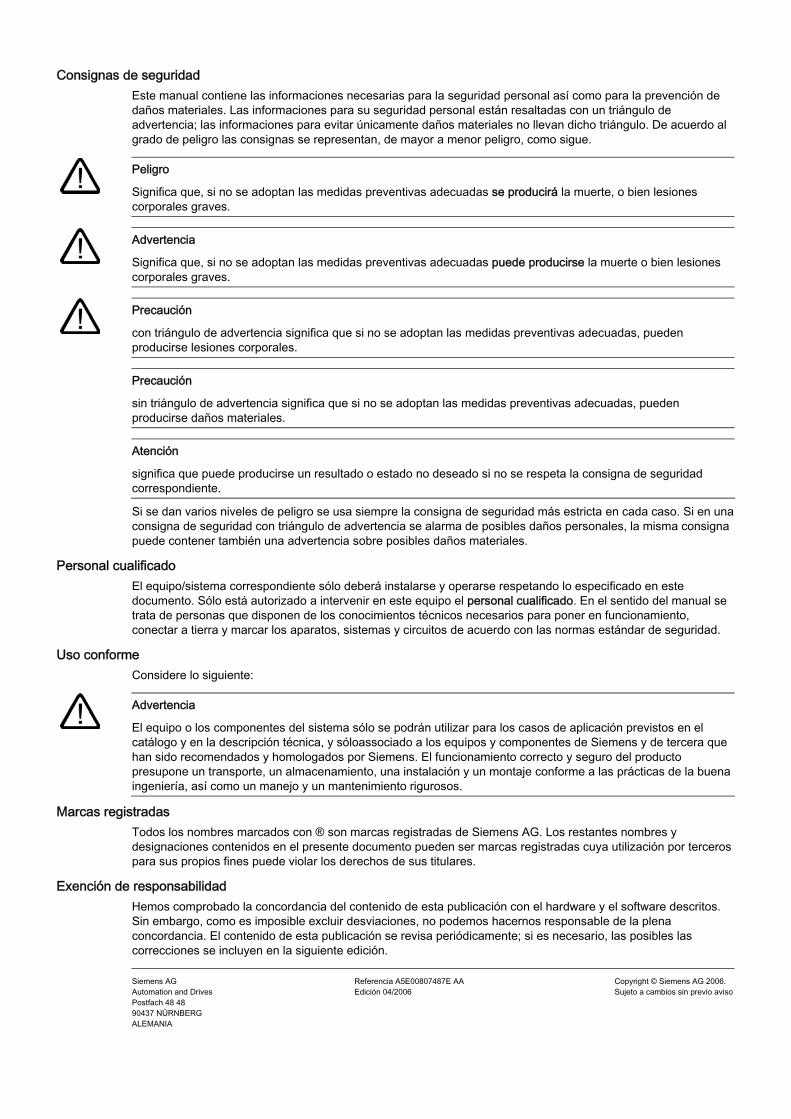
Información general sobre los bornes de mando Para acceder a los bornes de mando, es necesario retirar la tapa que los cubre tal y como se muestra en la figura inferior. Los bornes de mando tienen un par de apriete máximo de 0,25 Nm (2,2 lbf.in) y una sección nominal de los conductores de 1,5 mm2.
Figura 1-3 Retirar la tapa cubrebornes de la Control Unit
En todas las variantes de la Control Unit CU240 existe la posibilidad de separar los bornes de la caja después de haber conectado los hilos, tal y como se muestra en la siguiente figura. Así se puede cambiar una Control Unit por otra del mismo tipo sin necesidad de soltar los hilos.
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S 1-4 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
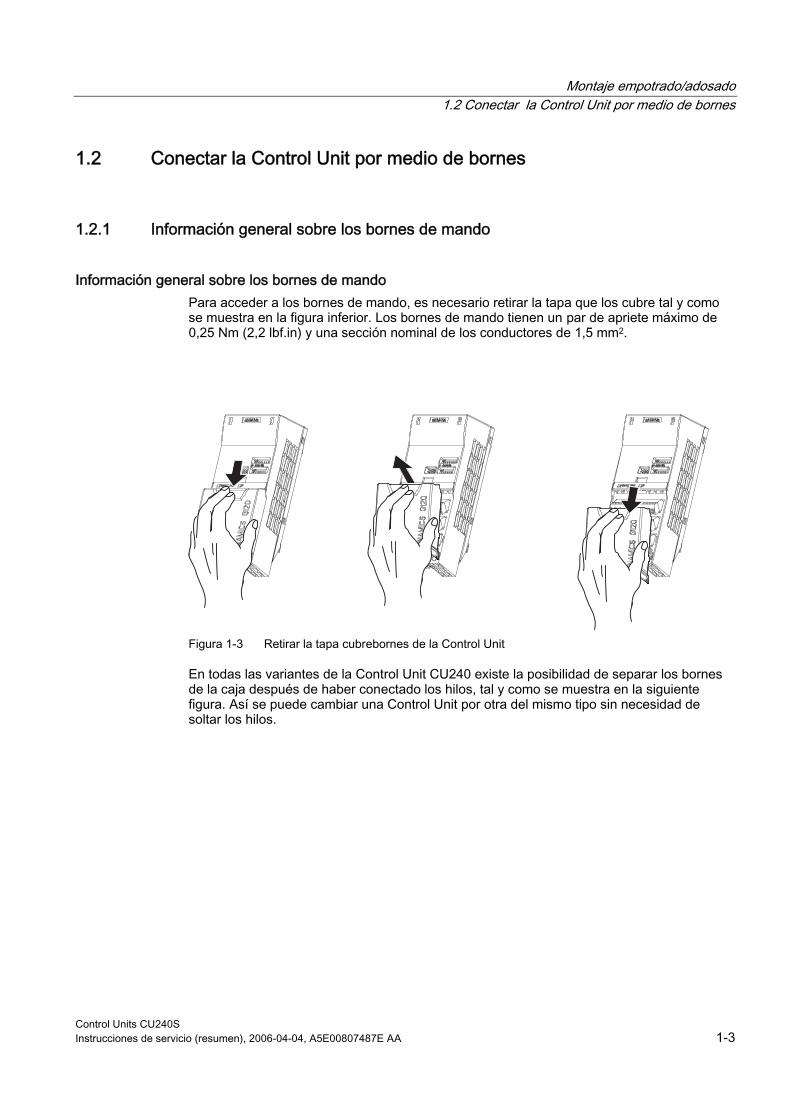
Figura 1-4 Forma de desenchufar las regletas enchufables tomado como ejemplo una CU240S DP
Una vez concluida la conexión de la Control Unit, es imprescindible volver a colocar la tapa cubrebornes.
1.2.2 Instalar la Control Unit por medio de bornes
Ejemplos de cableado de los terminales para la Control Unit CU240S, no para la CU240S DP y la CU240S DP-F
En esta sección se exponen ejemplos de cómo controlar un convertidor SINAMICS G120 con una CU240S a través de sus bornes. • Control básico con ajustes predeterminados • Consigna de frecuencia y una consigna adicional por medio de bornes
(AI0 y AI1 se utilizan como entradas tipo tensión) • Consigna de frecuencia y una consigna adicional por medio de bornes
(AI0 y AI1 se utilizan como entradas tipo corriente)
Nota La CU240S DP y la CU240S DP-F también se pueden controlar por medio de bornes, pero en este caso hay que modificar los ajustes de los parámetros para las fuentes de las señales de mando y consigna.
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-5
1.2.3 Cableado de mando de una Control Unit CU240S con ajuste predeterminado
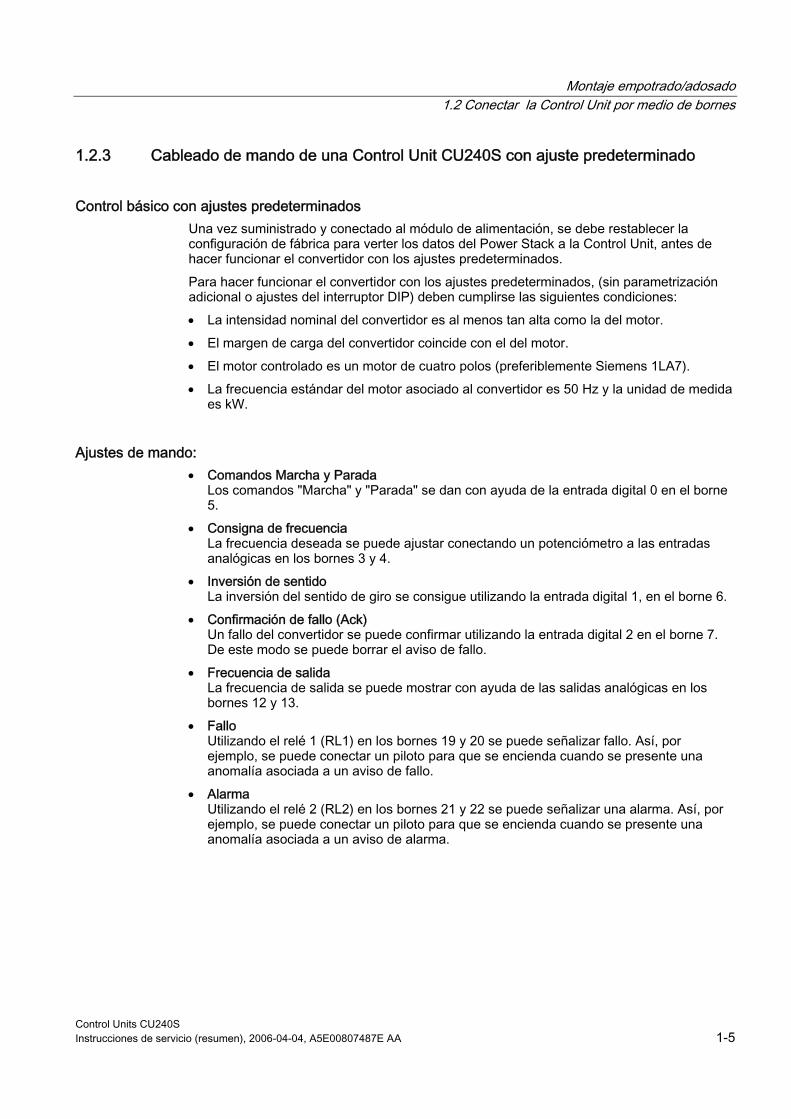
Control básico con ajustes predeterminados Una vez suministrado y conectado al módulo de alimentación, se debe restablecer la configuración de fábrica para verter los datos del Power Stack a la Control Unit, antes de hacer funcionar el convertidor con los ajustes predeterminados. Para hacer funcionar el convertidor con los ajustes predeterminados, (sin parametrización adicional o ajustes del interruptor DIP) deben cumplirse las siguientes condiciones: • La intensidad nominal del convertidor es al menos tan alta como la del motor. • El margen de carga del convertidor coincide con el del motor. • El motor controlado es un motor de cuatro polos (preferiblemente Siemens 1LA7). • La frecuencia estándar del motor asociado al convertidor es 50 Hz y la unidad de medida
es kW.
Ajustes de mando: • Comandos Marcha y Parada
Los comandos "Marcha" y "Parada" se dan con ayuda de la entrada digital 0 en el borne 5.
• Consigna de frecuencia La frecuencia deseada se puede ajustar conectando un potenciómetro a las entradas analógicas en los bornes 3 y 4.
• Inversión de sentido La inversión del sentido de giro se consigue utilizando la entrada digital 1, en el borne 6.
• Confirmación de fallo (Ack) Un fallo del convertidor se puede confirmar utilizando la entrada digital 2 en el borne 7. De este modo se puede borrar el aviso de fallo.
• Frecuencia de salida La frecuencia de salida se puede mostrar con ayuda de las salidas analógicas en los bornes 12 y 13.
• Fallo Utilizando el relé 1 (RL1) en los bornes 19 y 20 se puede señalizar fallo. Así, por ejemplo, se puede conectar un piloto para que se encienda cuando se presente una anomalía asociada a un aviso de fallo.
• Alarma Utilizando el relé 2 (RL2) en los bornes 21 y 22 se puede señalizar una alarma. Así, por ejemplo, se puede conectar un piloto para que se encienda cuando se presente una anomalía asociada a un aviso de alarma.
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S 1-6 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Figura 1-5 Cableado de mando predeterminado
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-7
1.2.4 Cableado de mando con entrada de tensión
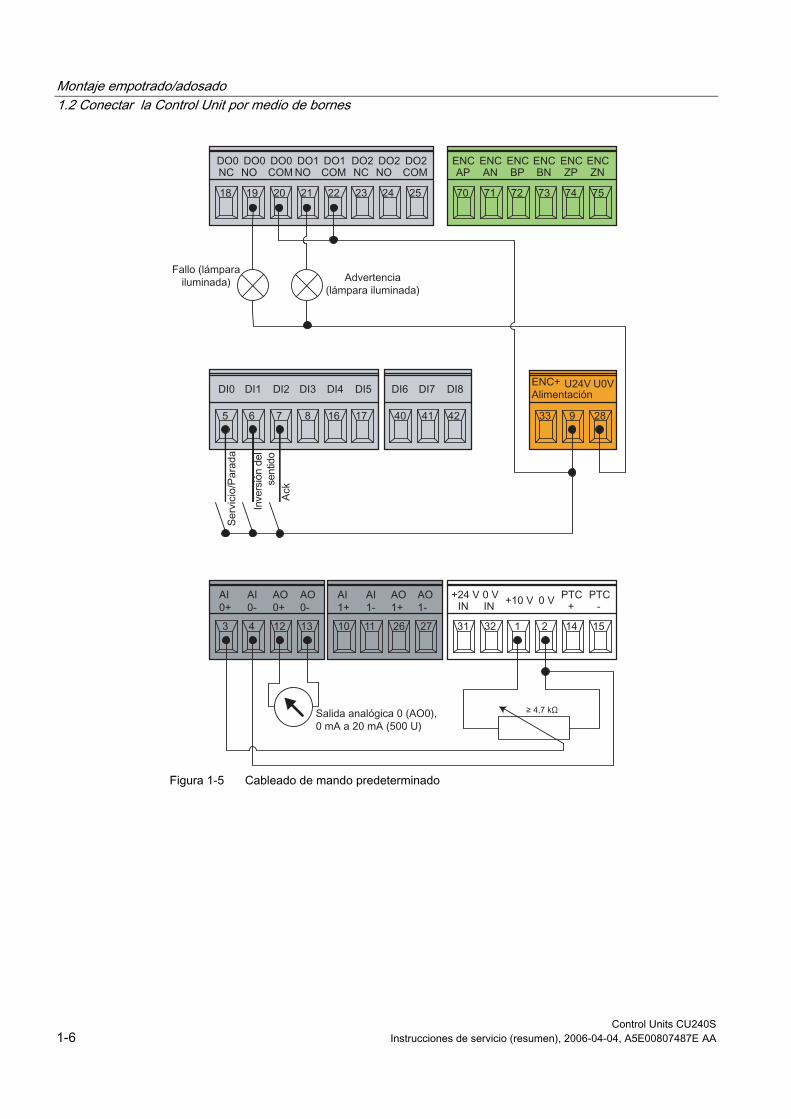
Consigna de frecuencia y consigna adicional por medio de bornes AI0 y AI1 como entradas de tensión Este tipo de cableado de mando permite establecer una consigna principal para la frecuencia y una consigna adicional conectando potenciómetros a las entradas analógicas AI0 y AI1. En la figura inferior se muestra el cableado necesario para ejecutar esta función. Ajustes de los interruptores DIP El interruptor DIP general de E/S sirve para configurar las entradas analógicas (AI). Utilizar los interruptores DIP 1 y 2 para colocar los interruptores en la posición OFF. Para más detalles, se ruega consultar la sección "Entrada analógica" en el capítulo "Función". Ajustes de los parámetros No es necesario modificar ningún otro parámetro.
Figura 1-6 Conexión de bornes y ajuste de los interruptores DIP para utilizar AI0 y AI1 como
consigna principal y consigna adicional
Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S 1-8 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
1.2.5 Cableado de mando con entrada de corriente
Consigna de la frecuencia y consigna adicional por medio de bornes AI0 y AI1 como entradas de corriente Este tipo de cableado de mando permite establecer una consigna principal para la frecuencia y una consigna adicional, p. ej. de un PLC. En la figura inferior se muestra el cableado necesario para ejecutar esta función. Ajustes de los interruptores DIP El interruptor DIP general de E/S sirve para configurar las entradas analógicas (AI). Utilizar los interruptores DIP 1 y 2 para colocar los interruptores en la posición ON. Para más detalles, se ruega consultar la sección "Entrada analógica" en el capítulo "Función". Ajustes de los parámetros Los siguientes parámetros se han de modificar con los valores que se exponen a continuación. Los cambios sólo se deben llevar a cabo después de la puesta en marcha rápida. Para el empleo de 0 a 20 mA • P0003 = 3 ajusta el nivel de acceso para el experto. • P1000[0] = 22 consigna que ahora se espera de las entradas analógicas. • P0756[0] = 2 ajusta la entrada analógica 0 (AI0) como entrada de corriente. • P0756[1] = 2 ajusta la entrada analógica 1 (AI1) como entrada de corriente. Si se usan señales de 4 a 20 mA En este caso es necesario modificar los siguientes parámetros adicionales: • P0757[0] = 4 ajusta la entrada analógica 0 (AI0) al valor mínimo de 4 mA. • P0761[0] = 4 ajusta el ancho de la zona muerta de la entrada analógica 0 (AI0). • P0757[1] = 4 ajusta la entrada analógica 1 (AI1) al valor mínimo de 4 mA. • P0761[1] = 4 ajusta el ancho de la zona muerta de la entrada analógica 1 (AI1).
Nota El índice [0] está asociado a la entrada analógica 0 y el índice [1], a la entrada analógica 1. Si sólo se utiliza una entrada analógica, basta con modificar el índice para la entrada en cuestión.

Montaje empotrado/adosado 1.2 Conectar la Control Unit por medio de bornes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-9
Figura 1-7 Cableado de mando con entrada de corriente
Montaje empotrado/adosado 1.3 Montaje de la interfaz de encóder
Control Units CU240S 1-10 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
1.3 Montaje de la interfaz de encóder
Preparación • El encóder ha sido montado en el motor tal y como se explica en las instrucciones de
montaje suministradas con el encóder. • El convertidor SINAMICS G120 está desconectado.
Apantallado Para garantizar un funcionamiento correcto del encóder, es imprescindible cumplir las normas que se exponen a continuación: • Para conectar el encóder a la interfaz sólo se debe utilizar un cable apantallado con
pares de hilos trenzados. • Si el cable de encóder tiene una pantalla o un conductor de tierra o un conductor de
protección, éste se debe conectar al panel posterior de la caja del convertidor o del armario.
• Los cables de señales no deben tenderse cerca de los cables de potencia.
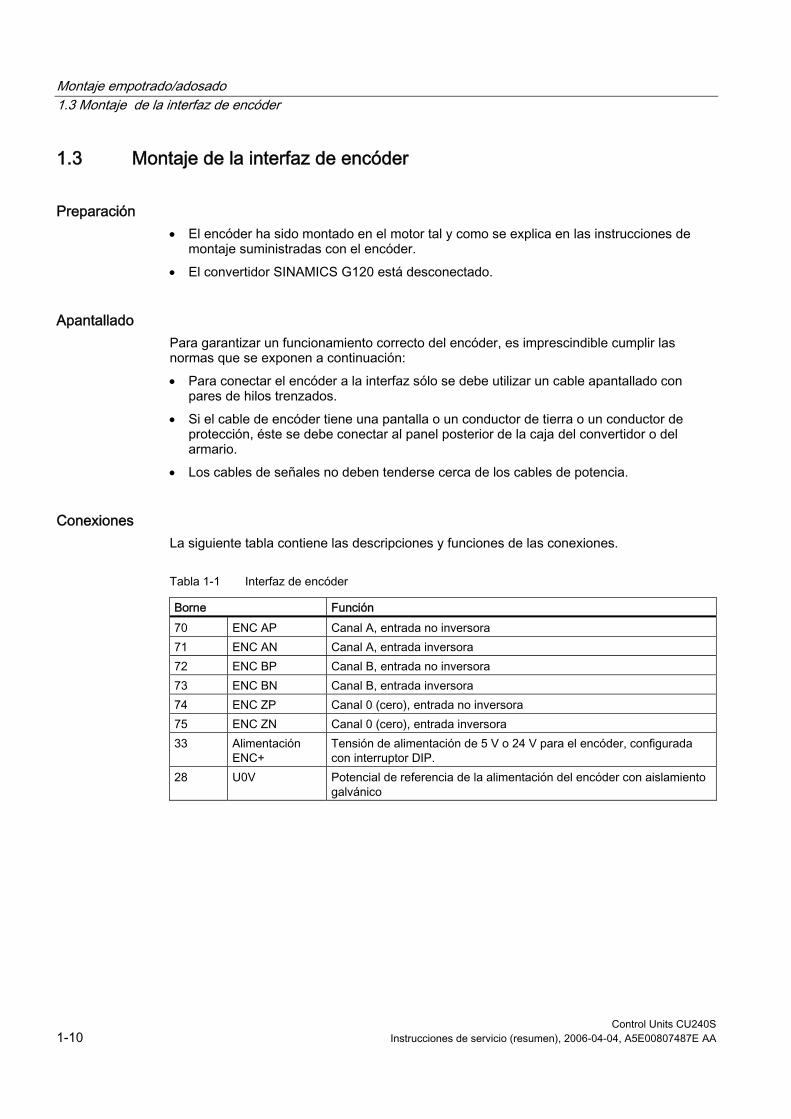
Conexiones La siguiente tabla contiene las descripciones y funciones de las conexiones.
Tabla 1-1 Interfaz de encóder
Borne Función 70 ENC AP Canal A, entrada no inversora 71 ENC AN Canal A, entrada inversora 72 ENC BP Canal B, entrada no inversora 73 ENC BN Canal B, entrada inversora 74 ENC ZP Canal 0 (cero), entrada no inversora 75 ENC ZN Canal 0 (cero), entrada inversora 33 Alimentación
ENC+ Tensión de alimentación de 5 V o 24 V para el encóder, configurada con interruptor DIP.
28 U0V Potencial de referencia de la alimentación del encóder con aislamiento galvánico
Montaje empotrado/adosado 1.3 Montaje de la interfaz de encóder
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 1-11
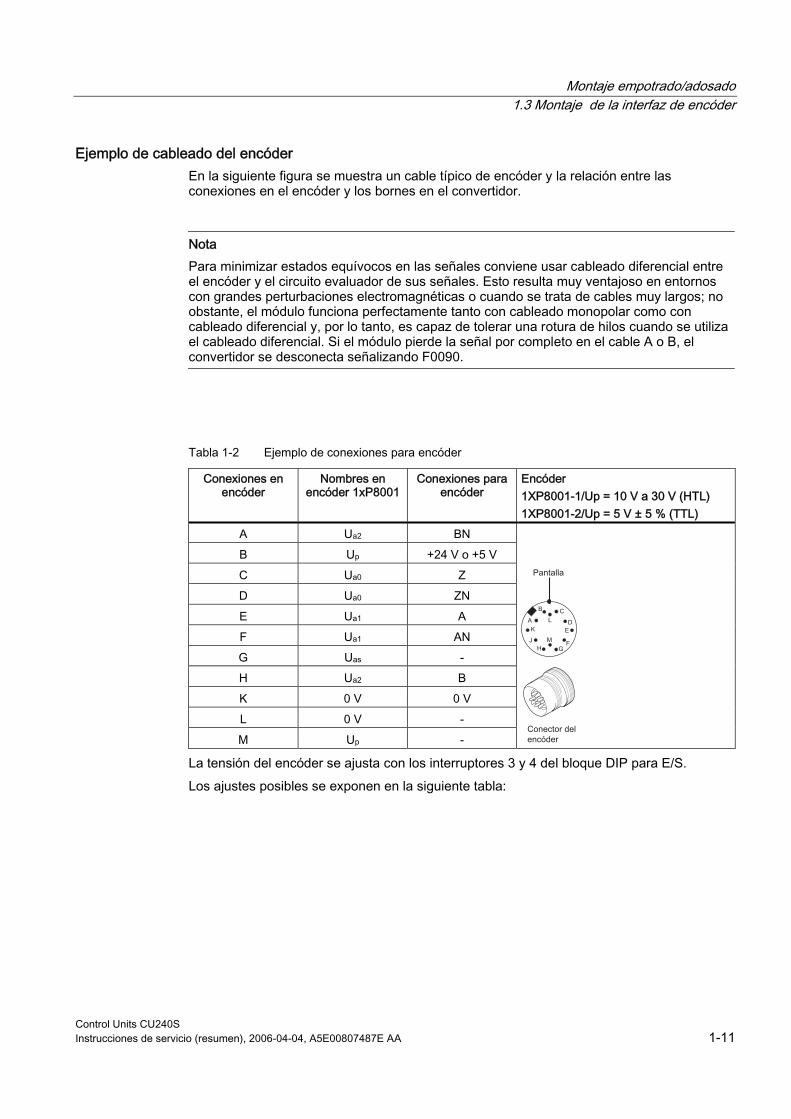
Ejemplo de cableado del encóder En la siguiente figura se muestra un cable típico de encóder y la relación entre las conexiones en el encóder y los bornes en el convertidor.
Nota Para minimizar estados equívocos en las señales conviene usar cableado diferencial entre el encóder y el circuito evaluador de sus señales. Esto resulta muy ventajoso en entornos con grandes perturbaciones electromagnéticas o cuando se trata de cables muy largos; no obstante, el módulo funciona perfectamente tanto con cableado monopolar como con cableado diferencial y, por lo tanto, es capaz de tolerar una rotura de hilos cuando se utiliza el cableado diferencial. Si el módulo pierde la señal por completo en el cable A o B, el convertidor se desconecta señalizando F0090.
Tabla 1-2 Ejemplo de conexiones para encóder
Conexiones en encóder
Nombres en encóder 1xP8001
Conexiones para encóder
Encóder 1XP8001-1/Up = 10 V a 30 V (HTL) 1XP8001-2/Up = 5 V ± 5 % (TTL)
A Ua2 BN B Up +24 V o +5 V C Ua0 Z D Ua0 ZN E Ua1 A F Ua1 AN G Uas - H Ua2 B K 0 V 0 V L 0 V - M Up -
B
DE
FH
KA L
M
C
GJ
La tensión del encóder se ajusta con los interruptores 3 y 4 del bloque DIP para E/S. Los ajustes posibles se exponen en la siguiente tabla:

Montaje empotrado/adosado 1.3 Montaje de la interfaz de encóder
Control Units CU240S 1-12 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Tabla 1-3 Ajustes de la tensión del encóder
ON
OFF
3 4 3 4 3 4 3 4 Tensión de
alimentación del encóder
0 V 24 V 5 V 24 V
Tipo de encóder Ningún encóder Encóder HTL Encóder TTL Encóder HTL
Advertencia Si los interruptores DIP 3 y 4 se encuentran en la posición ON, el encóder es alimentado con una tensión de 24 V. Cuando los interruptores DIP 3 y 4 se encuentran en la posición ON, no debe conectarse ningún encóder TTL al convertidor.
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-1
Puesta en marcha por software 22.1 Información general para la puesta en marcha
Información general para la puesta en marcha El convertidor se puede adaptar a diferentes aplicaciones modificando los valores de los parámetros. Los valores de los parámetros se modifican con una de las siguientes opciones: • El OP (Operator Panel), que se enchufa a la interfaz para opciones de la Control Unit • STARTER (software de puesta en marcha a través del PC) se puede conectar a la
interfaz para opciones a través de un kit de conexión de PC. • Por medio del MMC (diálogo hombre-máquina) para cargar juegos de parámetros
completos. En esta sección se describe la puesta en marcha de un convertidor G120 con ayuda de un OP. La puesta en marcha con el software STARTER se basa en cuadros de diálogo y no se explica en este manual. El convertidor se suministra con los mismos ajustes de fábrica que todas las Control Units CU240S; excepción: la definición de la fuente de mando y la fuente de señales de consigna dependen del Power Module.
Nota Carga y descarga • Por carga se entiende la copia de parámetros de la EEPROM de un convertidor a un PC
(vía STARTER), una tarjeta MMC o un OP. • Por descarga se entiende la transmisión de un juego de parámetros que se halla
guardado en un PC, una tarjeta MMC o un OP a la memoria RAM o EEPROM de un convertidor.
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S 2-2 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.2 Parámetros
2.2.1 Resumen de parámetros
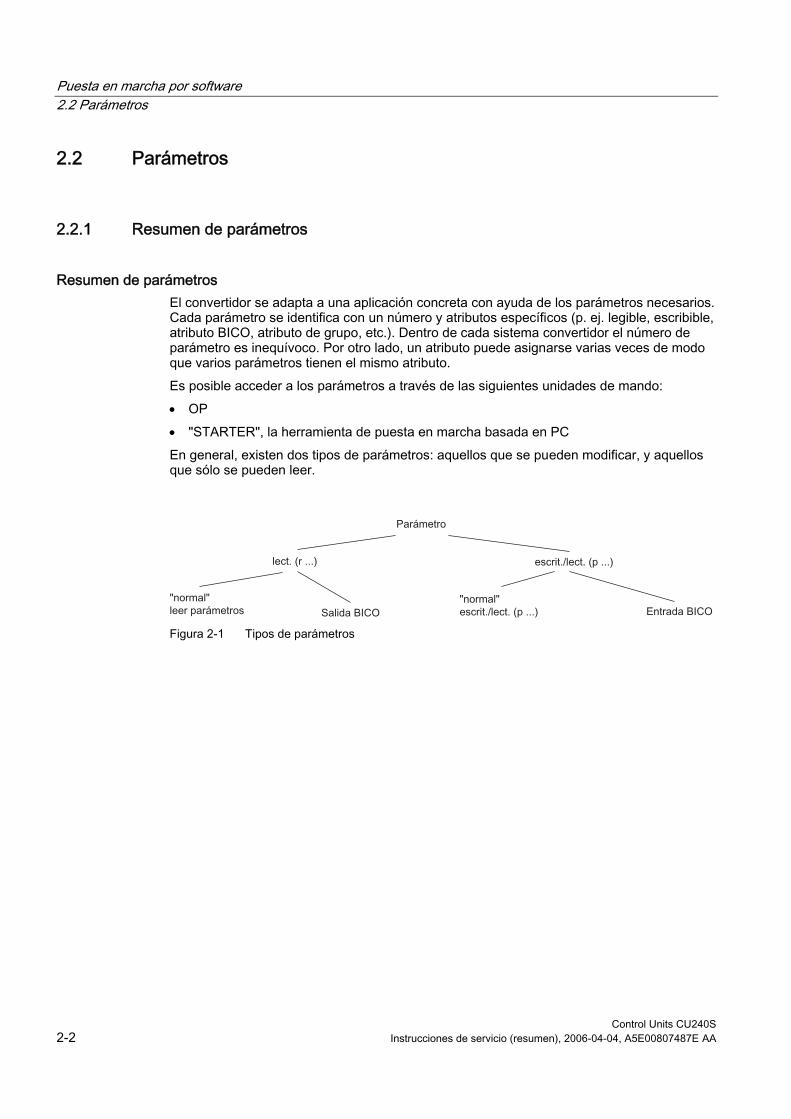
Resumen de parámetros El convertidor se adapta a una aplicación concreta con ayuda de los parámetros necesarios. Cada parámetro se identifica con un número y atributos específicos (p. ej. legible, escribible, atributo BICO, atributo de grupo, etc.). Dentro de cada sistema convertidor el número de parámetro es inequívoco. Por otro lado, un atributo puede asignarse varias veces de modo que varios parámetros tienen el mismo atributo. Es posible acceder a los parámetros a través de las siguientes unidades de mando: • OP • "STARTER", la herramienta de puesta en marcha basada en PC En general, existen dos tipos de parámetros: aquellos que se pueden modificar, y aquellos que sólo se pueden leer.
Figura 2-1 Tipos de parámetros
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-3
2.2.2 Parámetros aptos para escritura
Descripción Los parámetros aptos para escritura y lectura están caracterizados por el signo "P". Estos parámetros influyen directamente en el comportamiento de una función. El valor de este parámetro queda almacenado en una memoria no volátil (EEPROM) siempre que se haya seleccionado la opción correspondiente (almacenamiento de datos no volátil). De lo contrario, estos valores se guardan en la memoria volátil (RAM) del procesador y se pierden cuando se produce un corte de red o tras cada operación de desconexión y conexión. A continuación se muestran ejemplos de la programación estándar que se suele utilizar en nuestros manuales.
Ejemplos de notación: P0970 Parámetro 970: P0748.1 Parámetro 748, bit 01 P0819[1] Parámetro 819 índice 1 P0013[0 ... 19] Parámetro 13 con 20 índices (índices de 0 a 19)
2.2.3 Parámetros de vigilancia
Descripción Los parámetros que sólo sirven para vigilar están identificados por el prefijo "r". Estos parámetros se utilizan para visualizar magnitudes internas, por ejemplos, de estados o valores reales.
Ejemplos de programación: r0002 Parámetro de vigilancia 2 r0052.3 Parámetro de vigilancia 52, bit 03 r0947[2] Parámetro de vigilancia 947 índice 2 r0964[0 ... 4] Parámetro de vigilancia 964 con 5 índices (índices de 0 a 4)
2.2.4 Atributos de parámetros
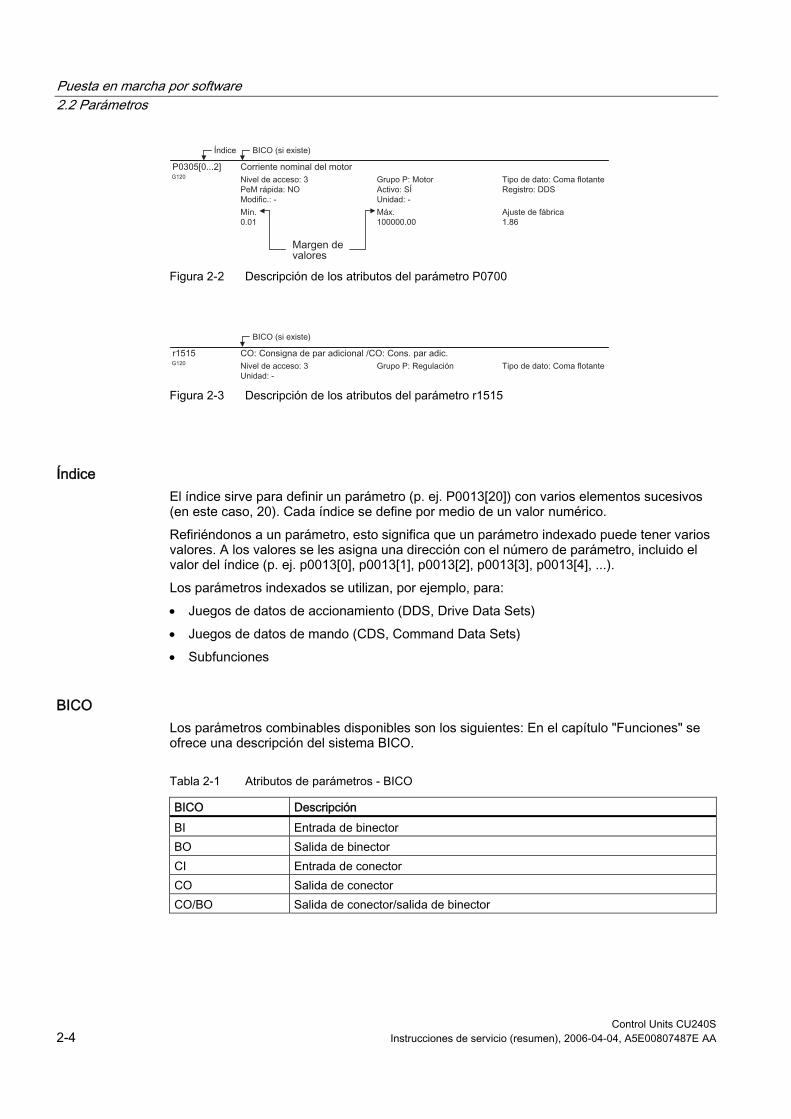
Sinopsis En la lista de parámetros se puede ver, en el encabezado de cada parámetro, todos los atributos y grupos correspondientes al parámetro en cuestión. En la siguiente imagen se muestran los detalles de los parámetros P0700 y r1515.
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S 2-4 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Figura 2-2 Descripción de los atributos del parámetro P0700
Figura 2-3 Descripción de los atributos del parámetro r1515
Índice El índice sirve para definir un parámetro (p. ej. P0013[20]) con varios elementos sucesivos (en este caso, 20). Cada índice se define por medio de un valor numérico. Refiriéndonos a un parámetro, esto significa que un parámetro indexado puede tener varios valores. A los valores se les asigna una dirección con el número de parámetro, incluido el valor del índice (p. ej. p0013[0], p0013[1], p0013[2], p0013[3], p0013[4], ...). Los parámetros indexados se utilizan, por ejemplo, para: • Juegos de datos de accionamiento (DDS, Drive Data Sets) • Juegos de datos de mando (CDS, Command Data Sets) • Subfunciones
BICO Los parámetros combinables disponibles son los siguientes: En el capítulo "Funciones" se ofrece una descripción del sistema BICO.
Tabla 2-1 Atributos de parámetros - BICO
BICO Descripción BI Entrada de binector BO Salida de binector CI Entrada de conector CO Salida de conector CO/BO Salida de conector/salida de binector
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-5
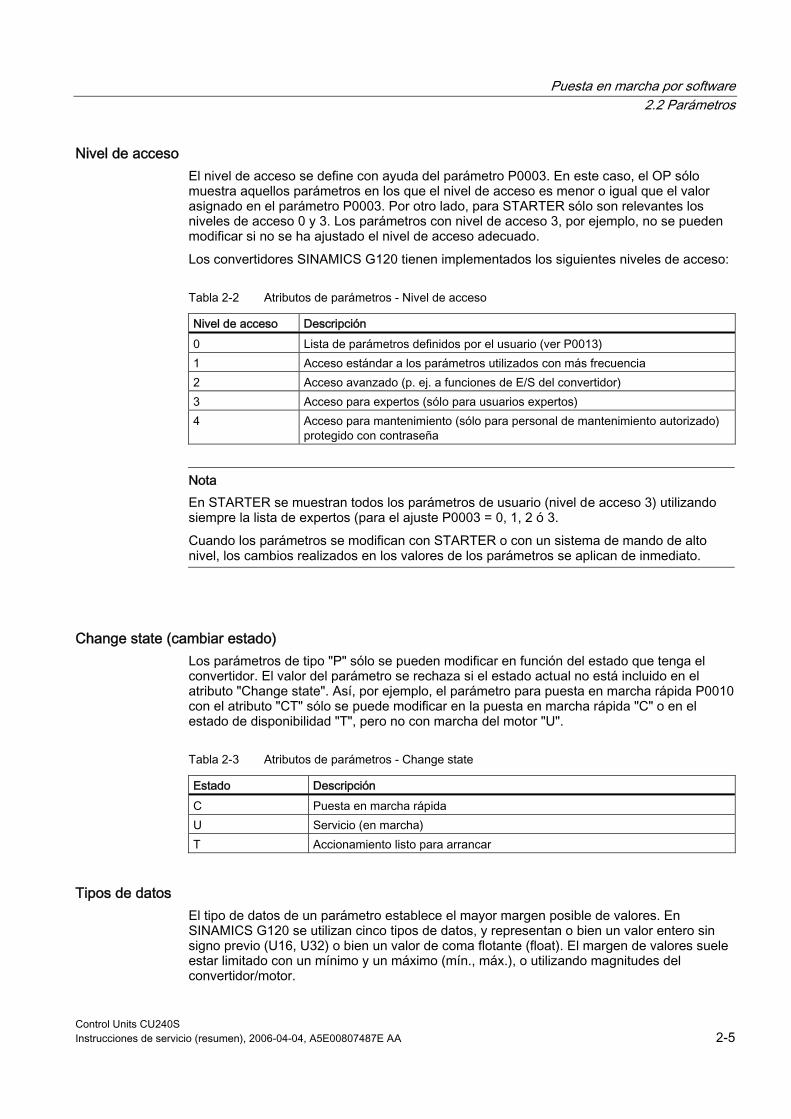
Nivel de acceso El nivel de acceso se define con ayuda del parámetro P0003. En este caso, el OP sólo muestra aquellos parámetros en los que el nivel de acceso es menor o igual que el valor asignado en el parámetro P0003. Por otro lado, para STARTER sólo son relevantes los niveles de acceso 0 y 3. Los parámetros con nivel de acceso 3, por ejemplo, no se pueden modificar si no se ha ajustado el nivel de acceso adecuado. Los convertidores SINAMICS G120 tienen implementados los siguientes niveles de acceso:
Tabla 2-2 Atributos de parámetros - Nivel de acceso
Nivel de acceso Descripción 0 Lista de parámetros definidos por el usuario (ver P0013) 1 Acceso estándar a los parámetros utilizados con más frecuencia 2 Acceso avanzado (p. ej. a funciones de E/S del convertidor) 3 Acceso para expertos (sólo para usuarios expertos) 4 Acceso para mantenimiento (sólo para personal de mantenimiento autorizado)
protegido con contraseña
Nota
En STARTER se muestran todos los parámetros de usuario (nivel de acceso 3) utilizando siempre la lista de expertos (para el ajuste P0003 = 0, 1, 2 ó 3. Cuando los parámetros se modifican con STARTER o con un sistema de mando de alto nivel, los cambios realizados en los valores de los parámetros se aplican de inmediato.
Change state (cambiar estado) Los parámetros de tipo "P" sólo se pueden modificar en función del estado que tenga el convertidor. El valor del parámetro se rechaza si el estado actual no está incluido en el atributo "Change state". Así, por ejemplo, el parámetro para puesta en marcha rápida P0010 con el atributo "CT" sólo se puede modificar en la puesta en marcha rápida "C" o en el estado de disponibilidad "T", pero no con marcha del motor "U".
Tabla 2-3 Atributos de parámetros - Change state
Estado Descripción C Puesta en marcha rápida U Servicio (en marcha) T Accionamiento listo para arrancar
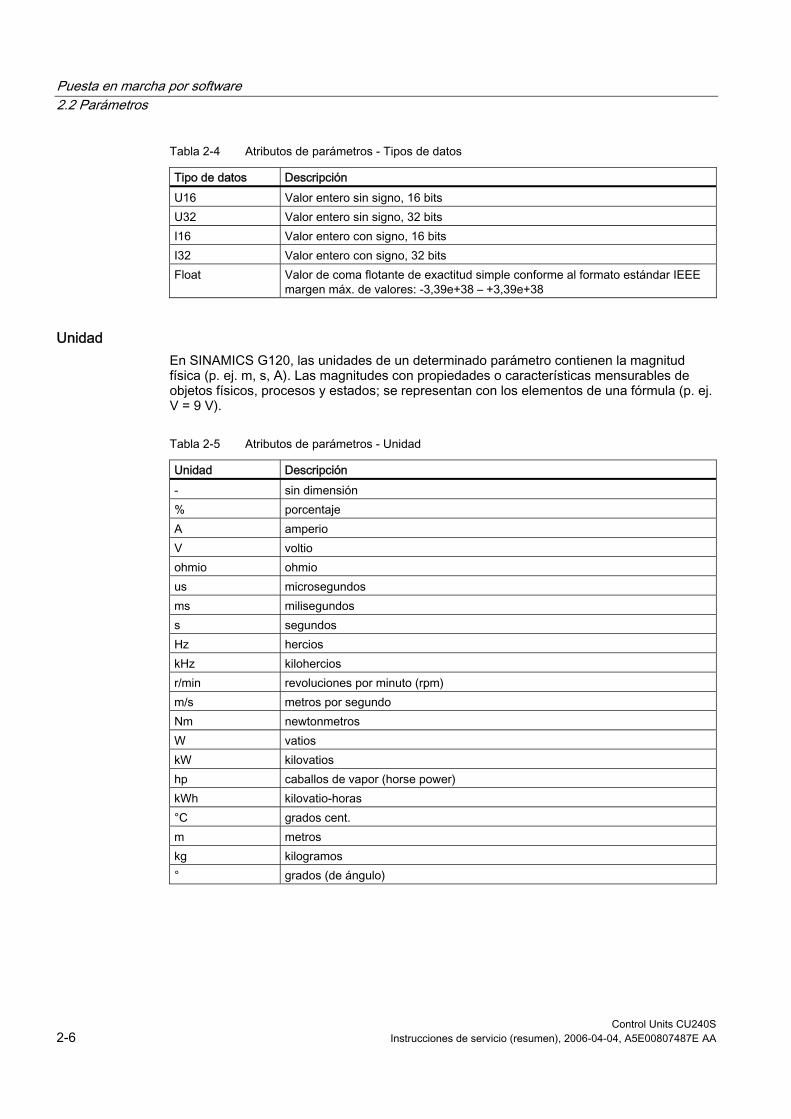
Tipos de datos El tipo de datos de un parámetro establece el mayor margen posible de valores. En SINAMICS G120 se utilizan cinco tipos de datos, y representan o bien un valor entero sin signo previo (U16, U32) o bien un valor de coma flotante (float). El margen de valores suele estar limitado con un mínimo y un máximo (mín., máx.), o utilizando magnitudes del convertidor/motor.
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S 2-6 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Tabla 2-4 Atributos de parámetros - Tipos de datos
Tipo de datos Descripción U16 Valor entero sin signo, 16 bits U32 Valor entero sin signo, 32 bits I16 Valor entero con signo, 16 bits I32 Valor entero con signo, 32 bits Float Valor de coma flotante de exactitud simple conforme al formato estándar IEEE
margen máx. de valores: -3,39e+38 – +3,39e+38
Unidad En SINAMICS G120, las unidades de un determinado parámetro contienen la magnitud física (p. ej. m, s, A). Las magnitudes con propiedades o características mensurables de objetos físicos, procesos y estados; se representan con los elementos de una fórmula (p. ej. V = 9 V).
Tabla 2-5 Atributos de parámetros - Unidad
Unidad Descripción - sin dimensión % porcentaje A amperio V voltio ohmio ohmio us microsegundos ms milisegundos s segundos Hz hercios kHz kilohercios r/min revoluciones por minuto (rpm) m/s metros por segundo Nm newtonmetros W vatios kW kilovatios hp caballos de vapor (horse power) kWh kilovatio-horas °C grados cent. m metros kg kilogramos ° grados (de ángulo)

Puesta en marcha por software 2.2 Parámetros
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-7
División en grupos Los parámetros están divididos en grupos de acuerdo con su funcionalidad. Esto incrementa la transparencia y facilita la búsqueda rápida y eficiente de determinados parámetros. Además, también se puede utilizar el parámetro P0004 para controlar el grupo específico de los parámetros visualizados en el OP.
Tabla 2-6 Atributos de parámetros - División en grupos
División en grupos Descripción Aplicación principal del parámetro:
SIEMPRE 0 Todos los parámetros CONVERTIDOR 2 Parámetros de convertidor 0200 … 0299 MOTOR 3 Parámetros de motor 0300 a 0399 y
0600 a 0699 ENCODER 4 Encóder 0400 … 0499 APL_TECN 5 Unidades/aplicaciones tecnológicas 0500 … 0599 COMANDOS 7 Comandos, E/S digitales 0700 a 0749 y
0800 a 0899 CONEXION 8 Entradas/salidas analógicas 0750 … 0799 CONSIGNA 10 Canal de consigna y generador de rampa 1000 … 1199 Funciones de seguridad
De seguridad 9000 … 9999
FUNC 12 Funciones de convertidor 1200 … 1299 CONTROL 13 Control/regulación del motor 1300 … 1799 TRANSMISION_DATOS
20 Transmisión de datos 2000 … 2099
ALARMAS 21 Errores, avisos, funciones de vigilancia 2100 … 2199 TECNOLOGIA 22 Regulador tecnológico (regulador PID) 2200 … 2399
Activo Este atributo sólo es relevante asociado a un OP. El atributo "Yes" indica que este valor se acepta mediante desplazamiento (modificación del parámetro con o ). Sobre todo los parámetros utilizados para funciones de optimización suelen tener esta propiedad (p. ej. aumento de la tensión constante P1310 o constantes de tiempo de filtrado). Por otra parte, en parámetros que tienen el atributo "First confirm" (confirmar primero), el valor no queda aceptado hasta que no se oprime la tecla
. Entre éstos figuran, por ejemplo, parámetros cuyo valor puede tener varios ajustes o significados (p. ej. selección de la fuente de consignas para la frecuencia P1000).
Tabla 2-7 Atributos de parámetros - Activo
Activo Descripción Sí
El valor es adoptado mediante desplazamiento con o . Confirmar primero
El valor no es aceptado hasta que no se oprime .
Puesta en marcha por software 2.2 Parámetros
Control Units CU240S 2-8 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Nota Los valores de parámetros modificados con STARTER o un sistema de mando de nivel superior no es necesario confirmarlos.
Puesta en marcha rápida Este atributo indica si el parámetro está incluido en la puesta en marcha rápida (QC, Quick Commissioning) (P0010 = 1).
Tabla 2-8 Atributos de parámetros - Puesta en marcha rápida
QC Descripción No El parámetro no está incluido en la puesta en marcha rápida. Sí El parámetro está incluido en la puesta en marcha rápida.
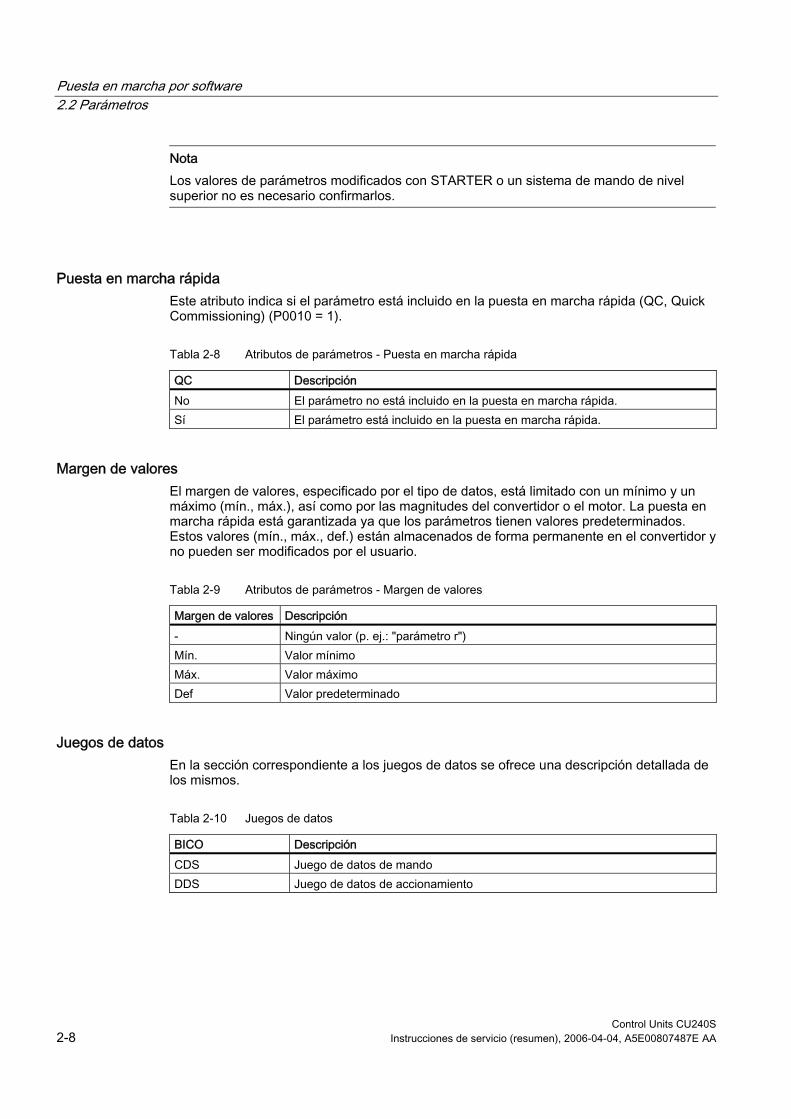
Margen de valores El margen de valores, especificado por el tipo de datos, está limitado con un mínimo y un máximo (mín., máx.), así como por las magnitudes del convertidor o el motor. La puesta en marcha rápida está garantizada ya que los parámetros tienen valores predeterminados. Estos valores (mín., máx., def.) están almacenados de forma permanente en el convertidor y no pueden ser modificados por el usuario.
Tabla 2-9 Atributos de parámetros - Margen de valores
Margen de valores Descripción - Ningún valor (p. ej.: "parámetro r") Mín. Valor mínimo Máx. Valor máximo Def Valor predeterminado
Juegos de datos En la sección correspondiente a los juegos de datos se ofrece una descripción detallada de los mismos.
Tabla 2-10 Juegos de datos
BICO Descripción CDS Juego de datos de mando DDS Juego de datos de accionamiento
Puesta en marcha por software 2.3 Ajustes de fábrica
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-9
2.3 Ajustes de fábrica
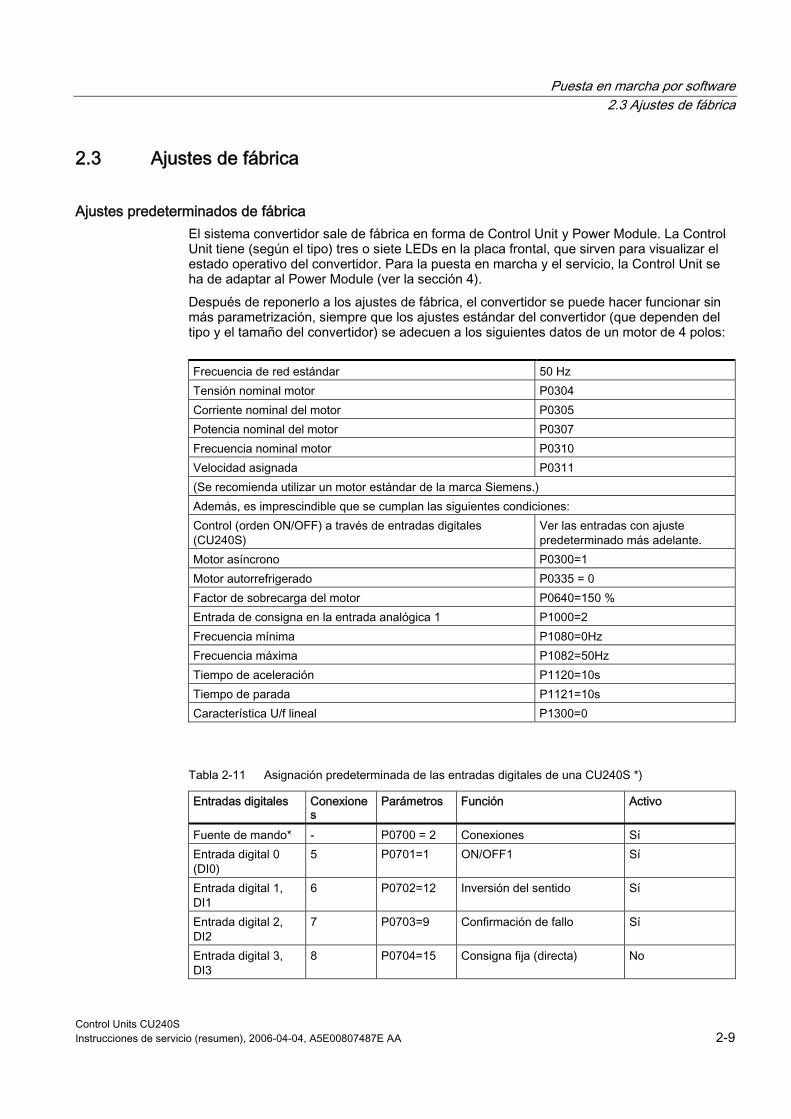
Ajustes predeterminados de fábrica El sistema convertidor sale de fábrica en forma de Control Unit y Power Module. La Control Unit tiene (según el tipo) tres o siete LEDs en la placa frontal, que sirven para visualizar el estado operativo del convertidor. Para la puesta en marcha y el servicio, la Control Unit se ha de adaptar al Power Module (ver la sección 4). Después de reponerlo a los ajustes de fábrica, el convertidor se puede hacer funcionar sin más parametrización, siempre que los ajustes estándar del convertidor (que dependen del tipo y el tamaño del convertidor) se adecuen a los siguientes datos de un motor de 4 polos:
Frecuencia de red estándar 50 Hz Tensión nominal motor P0304 Corriente nominal del motor P0305 Potencia nominal del motor P0307 Frecuencia nominal motor P0310 Velocidad asignada P0311 (Se recomienda utilizar un motor estándar de la marca Siemens.) Además, es imprescindible que se cumplan las siguientes condiciones: Control (orden ON/OFF) a través de entradas digitales (CU240S)
Ver las entradas con ajuste predeterminado más adelante.
Motor asíncrono P0300=1 Motor autorrefrigerado P0335 = 0 Factor de sobrecarga del motor P0640=150 % Entrada de consigna en la entrada analógica 1 P1000=2 Frecuencia mínima P1080=0Hz Frecuencia máxima P1082=50Hz Tiempo de aceleración P1120=10s Tiempo de parada P1121=10s Característica U/f lineal P1300=0
Tabla 2-11 Asignación predeterminada de las entradas digitales de una CU240S *)
Entradas digitales Conexiones
Parámetros Función Activo
Fuente de mando* - P0700 = 2 Conexiones Sí Entrada digital 0 (DI0)
5 P0701=1 ON/OFF1 Sí
Entrada digital 1, DI1
6 P0702=12 Inversión del sentido Sí
Entrada digital 2, DI2
7 P0703=9 Confirmación de fallo Sí
Entrada digital 3, DI3
8 P0704=15 Consigna fija (directa) No

Puesta en marcha por software 2.3 Ajustes de fábrica
Control Units CU240S 2-10 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Entradas digitales Conexiones
Parámetros Función Activo
Entrada digital 4, DI4
16 P0705=16 Consigna fija (directa) No
Entrada digital 5, DI5
17 P0706=17 Consigna fija (directa) No
Entrada digital 6, DI6
40 P0707=18 Consigna fija (directa) No
Entrada digital 7, DI7
41 P0708=0 Entrada digital pasivada No
Entrada digital 8, DI8
42 P0709=0 Entrada digital pasivada No
*) En las Control Units del tipo CU240S DP y CU240S DP-F, los parámetros P0700 y P1000 están ajustados a 6 (fuente de mando y fuente de consignas vía PROFIBUS DP).
Cuando se cumplen todos los requisitos para la instalación y la puesta en marcha y los datos del motor coinciden con los del convertidor, se pueden ejecutar las siguientes funciones con los ajustes de fábrica (utilizando una Control Unit CU240S):
Arranque y parada del motor Uso de DI0 con interruptor externo Inversión sentido de giro Uso de DI1 con interruptor (contacto) externo Borrar avisos de error Uso de DI2 con interruptor (contacto) externo Entrada de consigna de frecuencia Uso de AI0 con potenciómetro externo;
ajuste predeterminado de AI: entrada de tensión Indicación de la frecuencia real Uso de AO0 como salida de corriente
El potenciómetro y los interruptores externos se pueden conectar alimentados desde la fuente interna del convertidor (ver la sección "Conectar la Control Unit por medio de bornes").
Atención En caso de haber realizado ajustes distintos de los ajustes de fábrica, a la hora de poner en marcha el convertidor hay que prestar especial atención, de acuerdo con la complejidad de la aplicación, tanto a la descripción concreta de las funciones como a la lista de parámetros, incluidos los esquemas de funciones.
Puesta en marcha por software 2.4 Parametrización con el panel de mando (Operator Panel)
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-11
2.4 Parametrización con el panel de mando (Operator Panel)
2.4.1 Manejo del panel de mando (OP)
El panel de mando (OP) El OP se suministra a modo de opción destinada a incrementar la efectividad de la parametrización y el control del convertidor de frecuencia. Las señales de mando y la consigna de la velocidad se ajustan fácilmente oprimiendo las teclas al efecto. El OP permite leer juegos de parámetros de un convertidor y cargarlos en otro.
Figura 2-4 Operator Panel (OP, 6SL3255-0AA00-4BA1)
Colocar el OP en la Control Unit El OP se coloca en la Control Unit tal y como se muestra en la siguiente figura. La operación es siempre la misma, sea cual sea el tipo de Control Unit.
Figura 2-5 Colocación del OP en la CU
Puesta en marcha por software 2.4 Parametrización con el panel de mando (Operator Panel)
Control Units CU240S 2-12 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.4.2 Teclas de función del OP
Operator Panel - Teclas de función
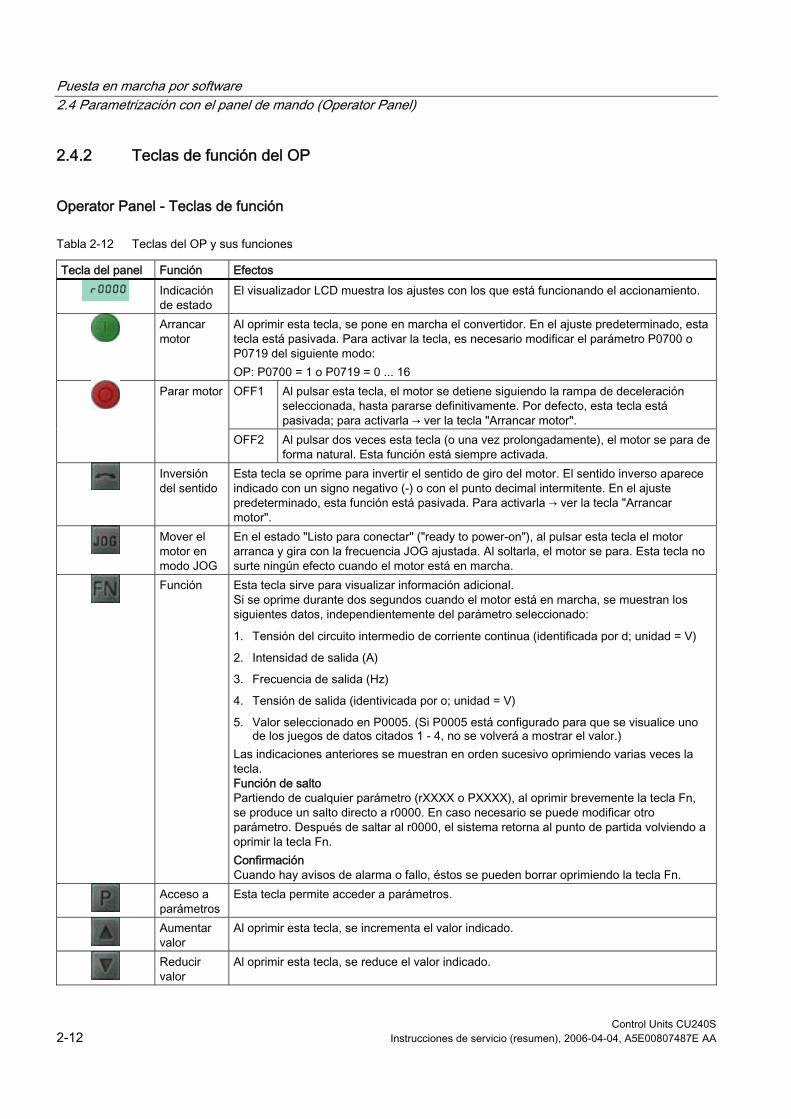
Tabla 2-12 Teclas del OP y sus funciones
Tecla del panel Función Efectos
Indicación de estado
El visualizador LCD muestra los ajustes con los que está funcionando el accionamiento.
Arrancar motor
Al oprimir esta tecla, se pone en marcha el convertidor. En el ajuste predeterminado, esta tecla está pasivada. Para activar la tecla, es necesario modificar el parámetro P0700 o P0719 del siguiente modo: OP: P0700 = 1 o P0719 = 0 ... 16 OFF1 Al pulsar esta tecla, el motor se detiene siguiendo la rampa de deceleración
seleccionada, hasta pararse definitivamente. Por defecto, esta tecla está pasivada; para activarla → ver la tecla "Arrancar motor".
Parar motor
OFF2 Al pulsar dos veces esta tecla (o una vez prolongadamente), el motor se para de forma natural. Esta función está siempre activada.
Inversión del sentido
Esta tecla se oprime para invertir el sentido de giro del motor. El sentido inverso aparece indicado con un signo negativo (-) o con el punto decimal intermitente. En el ajuste predeterminado, esta función está pasivada. Para activarla → ver la tecla "Arrancar motor".
Mover el motor en modo JOG
En el estado "Listo para conectar" ("ready to power-on"), al pulsar esta tecla el motor arranca y gira con la frecuencia JOG ajustada. Al soltarla, el motor se para. Esta tecla no surte ningún efecto cuando el motor está en marcha.
Función Esta tecla sirve para visualizar información adicional.
Si se oprime durante dos segundos cuando el motor está en marcha, se muestran los siguientes datos, independientemente del parámetro seleccionado:
1. Tensión del circuito intermedio de corriente continua (identificada por d; unidad = V)
2. Intensidad de salida (A)
3. Frecuencia de salida (Hz)
4. Tensión de salida (identivicada por o; unidad = V)
5. Valor seleccionado en P0005. (Si P0005 está configurado para que se visualice uno de los juegos de datos citados 1 - 4, no se volverá a mostrar el valor.)
Las indicaciones anteriores se muestran en orden sucesivo oprimiendo varias veces la tecla. Función de salto Partiendo de cualquier parámetro (rXXXX o PXXXX), al oprimir brevemente la tecla Fn, se produce un salto directo a r0000. En caso necesario se puede modificar otro parámetro. Después de saltar al r0000, el sistema retorna al punto de partida volviendo a oprimir la tecla Fn. Confirmación Cuando hay avisos de alarma o fallo, éstos se pueden borrar oprimiendo la tecla Fn.
Acceso a parámetros
Esta tecla permite acceder a parámetros.
Aumentar valor
Al oprimir esta tecla, se incrementa el valor indicado.
Reducir valor
Al oprimir esta tecla, se reduce el valor indicado.
Puesta en marcha por software 2.4 Parametrización con el panel de mando (Operator Panel)
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-13
2.4.3 Modificación de parámetros con el OP
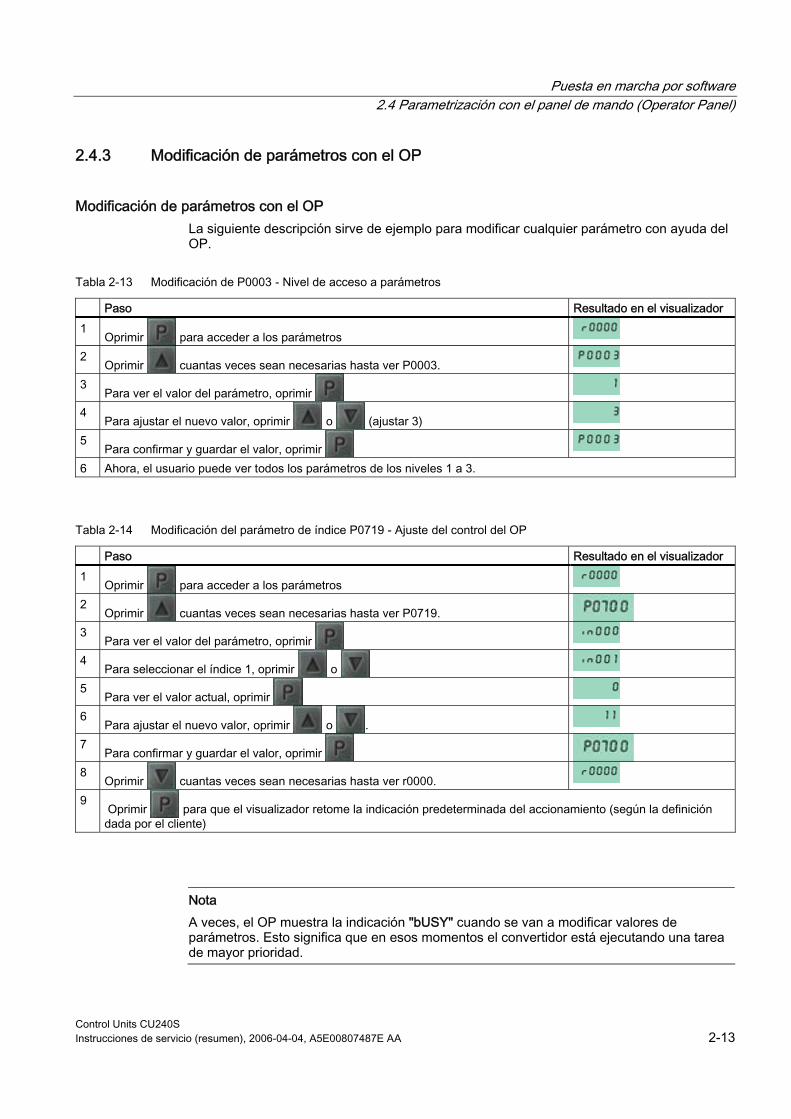
Modificación de parámetros con el OP La siguiente descripción sirve de ejemplo para modificar cualquier parámetro con ayuda del OP.
Tabla 2-13 Modificación de P0003 - Nivel de acceso a parámetros
Paso Resultado en el visualizador 1
Oprimir para acceder a los parámetros
2 Oprimir cuantas veces sean necesarias hasta ver P0003.
3 Para ver el valor del parámetro, oprimir
4 Para ajustar el nuevo valor, oprimir o (ajustar 3)
5 Para confirmar y guardar el valor, oprimir
6 Ahora, el usuario puede ver todos los parámetros de los niveles 1 a 3.
Tabla 2-14 Modificación del parámetro de índice P0719 - Ajuste del control del OP
Paso Resultado en el visualizador 1
Oprimir para acceder a los parámetros
2 Oprimir cuantas veces sean necesarias hasta ver P0719.
3 Para ver el valor del parámetro, oprimir
4 Para seleccionar el índice 1, oprimir o
5 Para ver el valor actual, oprimir
6 Para ajustar el nuevo valor, oprimir o .
7 Para confirmar y guardar el valor, oprimir
8 Oprimir cuantas veces sean necesarias hasta ver r0000.
9 Oprimir para que el visualizador retome la indicación predeterminada del accionamiento (según la definición dada por el cliente)
Nota A veces, el OP muestra la indicación "bUSY" cuando se van a modificar valores de parámetros. Esto significa que en esos momentos el convertidor está ejecutando una tarea de mayor prioridad.

Puesta en marcha por software 2.5 Parametrización con MMC
Control Units CU240S 2-14 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.5 Parametrización con MMC
Sinopsis Un convertidor G120 se puede parametrizar descargando en él un juego de parámetros almacenado en una tarjeta MMC. La descarga se puede realizar de los siguientes modos: • Descarga (download) manual • Descarga (download) automática • Descarga al arrancar En la sección "Manejo" se ofrece una descripción detallada de la descarga.
2.6 Parametrización con STARTER
2.6.1 Puesta en marcha con STARTER
Puesta en marcha con STARTER Las interfaces disponibles dependen de la unidad de control y son las siguientes:
Tabla 2-15 Posibilidades de conexión para STARTER
Tipo USS a RS232 USS a RS485 PROFIBUS DP PC a CU conectado mediante
Juego de conexión para PC
Cable Sub D y convertidor RS485-
RS232
Interface DP
Interfaz Conexión para opciones Conector Sub D Conector Sub D Limitaciones Peer-to-Peer hasta 31 esclavos hasta 125 esclavos CU240S X X -- CU240S DP X -- X CU240S DP-F X -- X
Datos generales para conectar STARTER Dirección USS: ver P2011; ajuste predeterminado P2011 = 0 Velocidad de transferencia USS: ver P2010; ajuste predeterminado P2010 = 8 (≙38400baudios) Dirección PROFIBUS DP: ver P0918 o interruptor DIP para PROFIBUS DP.

Puesta en marcha por software 2.6 Parametrización con STARTER
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-15
Proyectos STARTER Con STARTER existe la posibilidad de crear un nuevo proyecto o de abrir un proyecto ya creado. Para crear un nuevo proyecto en STARTER, se puede seguir uno de los métodos indicados a continuación: • Buscar convertidor • Asistente • Seleccionar convertidor Al abrir un proyecto ya existente o crear un proyecto nuevo, STARTER se halla en modo offline. Para cambiar al modo online, oprimir la tecla .
Modificar parámetros con STARTER Los parámetros se pueden modificar online u offline, aunque es preferible el modo online. Las modificaciones hechas online quedan guardadas en la memoria RAM del convertidor. La transferencia de la RAM a la EEPROM se puede iniciar manualmente oprimiendo . Si al salir de STARTER, el contenido de la RAM difiere del de la EEPROM, el sistema pregunta al usuario si desea transferir los datos de la RAM a la EEPROM.
Nota Con P0014 se puede modificar el modo de almacenamiento: • P0014 = 0: Las modificaciones de los parámetros se memorizan en la RAM
(predeterminado). • P0014 = 1: Las modificaciones de los parámetros se memorizan en la EEPROM.
Los juegos de parámetros modificados offline se pueden transferir al convertidor con ayuda de la tecla de descarga .
Precaución Los parámetros para funciones de seguridad sólo se pueden modificar online. Al descargar parámetros desde STARTER, no se descargan los parámetros para funciones de seguridad.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-16 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7 Modos de puesta en marcha
2.7.1 Sinopsis de la puesta en marcha
Sinopsis de la puesta en marcha Para la puesta en marcha del convertidor de frecuencia desde el OP, se distinguen los siguientes casos: • Puesta en marcha rápida • Lectura de los datos del motor • Cálculo de los datos del motor/control • Puesta en marcha de la aplicación • Puesta en marcha en serie Al principio se recomienda realizar una puesta en marcha rápida o una puesta en marcha en serie. En la puesta en marcha del convertidor de frecuencia con STARTER, esto significa "reconfigure Drive" (reconfigurar el accionamiento). La "puesta en marcha de la aplicación" sólo se debe llevar a cabo cuando la combinación formada por el convertidor y el motor da un resultado satisfactorio. Si se va a poner en marcha el convertidor desde un determinado estado, existe la posibilidad de restablecer su estado original, tal y como salió de fábrica. Para ello se restablecen todos los parámetros en los valores originales de fábrica; este proceso se denomina "Factory Reset". En la siguiente lista de comprobación tiene por finalidad ayudar al usuario durante la puesta en marcha del convertidor y garantizar un alto grado de disponibilidad: • Durante todos los trabajos que se realicen en el convertidor, es imprescindible respetar
con sumo detalle todas las medidas de protección de los componentes sensibles a descargas electroestáticas.
• Todos los tornillos se tienen que apretar con el par prescrito. • Todos los conectores macho y módulos opcionales se tienen que enchufar, fijar o
atornillar firmemente, tal y como se indica en los reglamentos. • Todos los componentes han de contar con una puesta a tierra/puesta a tierra de
protección en los puntos previstos para tal efecto, y todas las pantallas tienen que estar conectadas.
• El convertidor de frecuencia ha sido diseñado para funcionar en determinadas condiciones mecánicas, climáticas y eléctricas. No está permitido sobrepasar en ningún caso los valores límites especificados para el funcionamiento o el transporte del convertidor. Puntos a tener en cuenta: – Condiciones de alimentación y de la red – Problemas causados por suciedad – Gases que pueden perjudicar el funcionamiento – Condiciones climáticas del entorno – Almacenamiento/transporte
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-17
– Esfuerzos por choques – Esfuerzos por vibraciones – Temperatura ambiente – Altura de instalación sobre nivel del mar.
Además de la ejecución correcta de todos los trabajos de instalación, otro requisito importante para una puesta en marcha satisfactoria es que el convertidor no esté separado de la tensión de red durante la parametrización. Si la puesta en marcha se ve interrumpida por un corte eléctrico, es posible que surjan conflictos relacionados con la parametrización. En dichos casos es importante recomenzar la puesta en marcha, dado el caso con un "Factory Reset" para restablecer los ajustes originales de fábrica.
Atención Comportamiento del convertidor al concluir la puesta en marcha Al poner en marcha el convertidor, debe tenerse en cuenta el siguiente comportamiento: • Puesta en marcha estándar con P0014 = 0:
Los parámetros sólo se memorizan en la RAM. El proceso de carga RAM -> EEPROM se puede iniciar: – con OP: ajustando P0971 = 1 – con STARTER en modo online: El proceso de carga RAM -> EEPROM se ejecuta
automáticamente al iniciar la transmisión de datos del convertidor a la tarjeta MMC (P0802 = 2).
• Puesta en marcha estándar con P0014 = 1: Todas las modificaciones de parámetros se almacenan tanto en la memoria RAM como en la EEPROM.
• Durante la puesta en marcha de las funciones de seguridad (sólo posible con una CU240S DP-F), los parámetros correspondientes se memorizan automáticamente tanto en la RAM como en la EEPROM.
• Los datos de la EEPROM se pueden transferir con P0802 = 2 a la MMC. • Independientemente de si hay una tarjeta MMC insertada o no, existe la posibilidad de
modificar parámetros. Según sean los ajustes de P8458, después de una desconexión se utilizan los parámetros de la EEPROM o de la tarjeta MMC para el arranque. El cliente tiene que encargarse de que P8458 tenga los ajustes correctos. – P8458 = 0, no hay descarga automática de los parámetros de la MMC. – P8458 = 1, descarga automática de parámetros desde la MMC sólo durante la
primera inicialización de la CU si la MMC está insertada. – P8458 = 2, descarga automática de parámetros desde la MMC después de cada
inicialización de la CU si la MMC está insertada.
Advertencia Si los ajustes de los parámetros se cargan al inicializar la MMC, aparece F0395. En aplicaciones estándar es necesario realizar una prueba de confirmación y en aplicaciones de seguridad, una prueba de recepción (aceptación).

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-18 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.2 Puesta en marcha rápida
Descripción Si aún no hay ningún juego de parámetros apto para el accionamiento, será necesario realizar una puesta en marcha rápida para la regulación vectorial y la regulación U/f, incluida una rutina de lectura de los datos del motor. La puesta en marcha rápida se puede llevar a cabo con las siguientes unidades de mando: • OP (opcional) • Herramientas de PC (con el programa de puesta en marcha STARTER) Una vez concluida la puesta en marcha rápida, el convertidor de alimentación del motor está básicamente preparado para funcionar. Antes de comenzar la puesta en marcha rápida, hay que solicitar, modificar o introducir los siguientes datos: • Introducir la frecuencia de red • Introducir los datos de la placa de características • Fuentes de señales de mando/consignas • Frecuencia mín./máx. o tiempo de aceleración/deceleración en rampa • Tipo regulación • Lectura de los datos del motor
Parametrización del convertidor con OP El convertidor de frecuencia se adapta al motor con ayuda de la función de puesta en marcha rápida, y se ajustan parámetros tecnológicos importantes. La puesta en marcha rápida no se debe llevar a cabo cuando los datos nominales del motor almacenados en el convertidor (motor tetrapolar Siemens 1LA, conexión en estrella, apto para convertidores de frecuencia (FU)) no coinciden con los datos de la placa de características.
Advertencia La rutina de lectura de los datos del motor NO SE DEBE ejecutar cuando haya cargas que puedan resultar peligrosas (p. ej. cargas suspensas de grúas). Antes de iniciar la rutina de lectura de los datos del motor, es necesario asegurar con sumo cuidado la carga peligrosa (p. ej. bajándola hasta el suelo o inmovilizándola con ayuda del freno de parada del motor).
Los datos que pueden aparecer en la placa de características se muestran en la siguiente imagen. La definición exacta y explicación de estos datos está dada en la norma DIN EN 60034-1.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-19
Figura 2-6 Ejemplo de placa de características de un motor
2.7.3 Puesta en marcha rápida - Diagrama de flujo
Ejecución de la puesta en marcha rápida con OP En aplicaciones que funcionan con regulación U/f (P1300 = 0 [asignación predeterminada]) o regulación de la corriente de campo (FCC) (P1300 = 1 o 6), la puesta en marcha se puede ejecutar ajustando los siguientes parámetros:
Introducir la frecuencia del motor P0100 Introducir datos de la placa de características P0304
P0304, P0305, P0307, P0310 y P0311
Fuentes de señales de mando y de consignas
P0700, P1000
Frecuencia mínima y máxima P1080, P1082 Tiempo de aceleración y deceleración en rampa
P1120, P1121
Tipo regulación P1300 Lectura de los datos del motor P1900=3
En aplicaciones que funcionan con regulación vectorial (P1300 = 20 a 23), se tienen que ajustar y utilizar los parámetros que figuran en la siguiente tabla: Los parámetros marcados con el signo "*" admiten más ajustes. Ver la lista de parámetros.
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-20 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
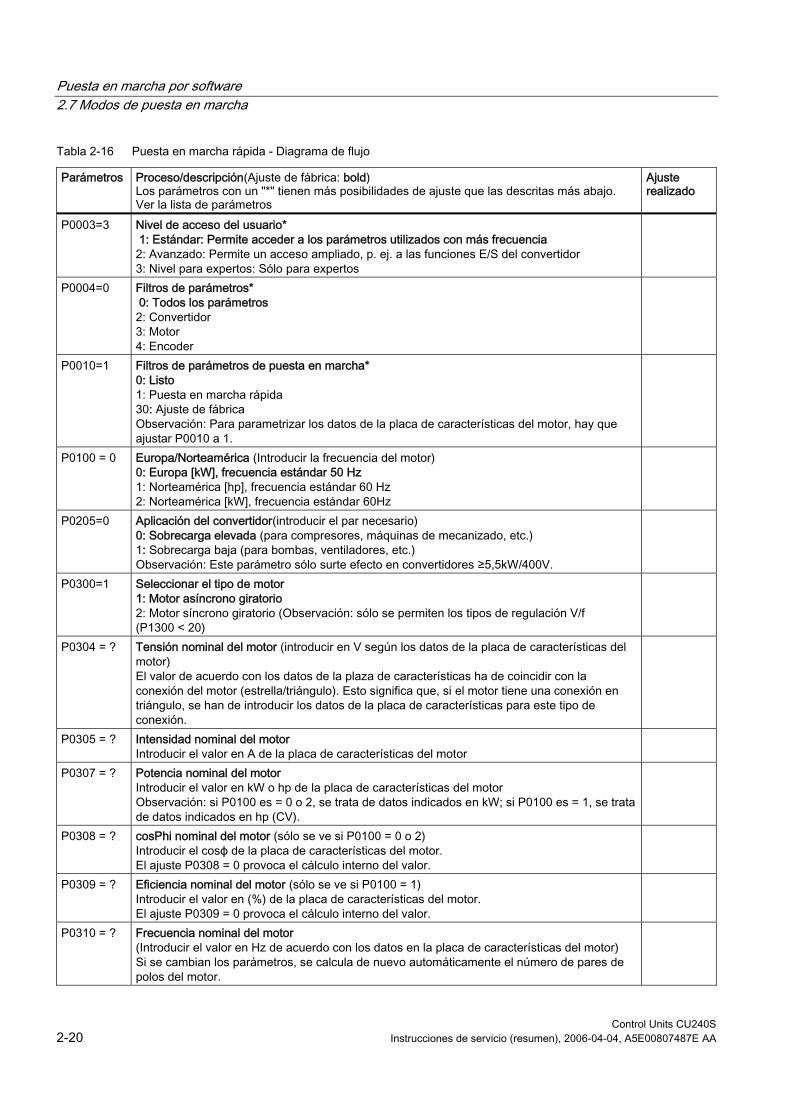
Tabla 2-16 Puesta en marcha rápida - Diagrama de flujo
Parámetros Proceso/descripción(Ajuste de fábrica: bold) Los parámetros con un "*" tienen más posibilidades de ajuste que las descritas más abajo. Ver la lista de parámetros
Ajuste realizado
P0003=3 Nivel de acceso del usuario* 1: Estándar: Permite acceder a los parámetros utilizados con más frecuencia 2: Avanzado: Permite un acceso ampliado, p. ej. a las funciones E/S del convertidor 3: Nivel para expertos: Sólo para expertos
P0004=0 Filtros de parámetros* 0: Todos los parámetros 2: Convertidor 3: Motor 4: Encoder
P0010=1 Filtros de parámetros de puesta en marcha* 0: Listo 1: Puesta en marcha rápida 30: Ajuste de fábrica Observación: Para parametrizar los datos de la placa de características del motor, hay que ajustar P0010 a 1.
P0100 = 0 Europa/Norteamérica (Introducir la frecuencia del motor) 0: Europa [kW], frecuencia estándar 50 Hz 1: Norteamérica [hp], frecuencia estándar 60 Hz 2: Norteamérica [kW], frecuencia estándar 60Hz
P0205=0 Aplicación del convertidor(introducir el par necesario) 0: Sobrecarga elevada (para compresores, máquinas de mecanizado, etc.) 1: Sobrecarga baja (para bombas, ventiladores, etc.) Observación: Este parámetro sólo surte efecto en convertidores ≥5,5kW/400V.
P0300=1 Seleccionar el tipo de motor 1: Motor asíncrono giratorio 2: Motor síncrono giratorio (Observación: sólo se permiten los tipos de regulación V/f (P1300 < 20)
P0304 = ? Tensión nominal del motor (introducir en V según los datos de la placa de características del motor) El valor de acuerdo con los datos de la plaza de características ha de coincidir con la conexión del motor (estrella/triángulo). Esto significa que, si el motor tiene una conexión en triángulo, se han de introducir los datos de la placa de características para este tipo de conexión.
P0305 = ? Intensidad nominal del motor Introducir el valor en A de la placa de características del motor
P0307 = ? Potencia nominal del motor Introducir el valor en kW o hp de la placa de características del motor Observación: si P0100 es = 0 o 2, se trata de datos indicados en kW; si P0100 es = 1, se trata de datos indicados en hp (CV).
P0308 = ? cosPhi nominal del motor (sólo se ve si P0100 = 0 o 2) Introducir el cosϕ de la placa de características del motor. El ajuste P0308 = 0 provoca el cálculo interno del valor.
P0309 = ? Eficiencia nominal del motor (sólo se ve si P0100 = 1) Introducir el valor en (%) de la placa de características del motor. El ajuste P0309 = 0 provoca el cálculo interno del valor.
P0310 = ? Frecuencia nominal del motor (Introducir el valor en Hz de acuerdo con los datos en la placa de características del motor) Si se cambian los parámetros, se calcula de nuevo automáticamente el número de pares de polos del motor.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-21
Parámetros Proceso/descripción(Ajuste de fábrica: bold) Los parámetros con un "*" tienen más posibilidades de ajuste que las descritas más abajo. Ver la lista de parámetros
Ajuste realizado
P0311 = ? Velocidad nominal del motor (Introducir en 1/min. según los datos de la placa de características del motor) Si se establece P0311 = 0, se calcula internamente el valor. Observación: Necesario para la regulación vectorial y la regulación V/f con regulador de velocidad. La compensación de deslizamiento con regulación V/f necesita la velocidad nominal del motor para un funcionamiento correcto.
P0314 = ? Número de pares de polos del motor 1: Motor de 2 polos 2: Motor de 4 polos Se calcula de nuevo automáticamente cuando se cambia P0310 (frecuencia nominal del motor) o P0311 (velocidad nominal del motor).
P0320 = ? Corriente de magnetización del motor El ajuste P0320 = 0 hace que el cálculo se realice con P0340 = 1 (habiendo introducido los datos de la placa de características) o con P3900 = 1, 2 o 3. El valor resultante se indica en el parámetro r0331.
P0335 = 0 Refrigeración del motor 0: Autoventilación con ventilador de eje 1: Refrigeración forzada con ventilador alimentado por separado 2: Autoventilación con ventilador interno 3: Refrigeración forzada y ventilador interno
P0400=0 Seleccionar el tipo de encoder 0: Bloqueado 2: Encoder de cuadratura sin impulso cero 12: Encoder de cuadratura e impulso cero Observación: Existe la posibilidad de conectar encoders con impulso cero, pero éste no se utiliza.
P0408 = ? Impulsos del encoder por vuelta Indica la cantidad de impulsos del encoder por cada vuelta (resolución del encoder) Observación: La resolución del encoder está limitada por la frecuencia de impulsos máxima de los circuitos de encoder (f_máx = 300 kHz).
P0500=0 Aplicación tecnológica (Selecciona la aplicación tecnológica entre 0: Sobrecarga elevada 1: Sobrecarga baja (para bombas y ventiladores, etc., establece interno P1300 = 2)
P0610=2 Reacción a la temperatura I2t del motor Define el comportamiento cuando se alcanza el umbral de advertencia de la temperatura del motor. 0: Ninguna reacción, sólo alarma 1: Alarma y reducción de Imáx 2: Alarma y desconexión (F0011)
P0625 = ? Temperatura ambiente del motor Temperatura ambiente del motor en el momento de leer los datos del motor Observación: El valor sólo se debe modificar con el motor frío. Después de modificar el valor es necesario realizar una lectura de los datos del motor.
P0640=150 Factor de sobrecarga del motor Define el límite de sobrecarga del motor [%] respecto a P0305 (intensidad nominal del motor). Define el límite de la corriente de salida máxima en porcentaje de la intensidad nominal del motor (P0305). Este parámetro se ajusta con P0205; para par constante, en 150 % y para par variable, en 110 % como máximo.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-22 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Parámetros Proceso/descripción(Ajuste de fábrica: bold) Los parámetros con un "*" tienen más posibilidades de ajuste que las descritas más abajo. Ver la lista de parámetros
Ajuste realizado
P0700 = 2 Selección de la fuente de señales de mando* (introducir la fuente de señales de mando) 0: Ajuste predeterminado de fábrica 1: OP (teclado) 2 terminal (estándar en CUS240S) 4: USS en RS232 5: USS en RS485 6: Bus de campo (predeterminado en CUS240S DP y CUS240S DP-F)
P0727=0 Selección del método de 2/3 hilos (Determina el procedimiento de evaluación si se usan los bornes.) 0: Siemens (arranque/sentido) 1: Conexión a dos hilos (adelante/atrás) 2: Conexión a tres hilos (adelante/atrás) 3: Conexión a tres hilos (arranque/sentido)
P1000=2 Selección de la consigna de frecuencia* (indica la fuente de la consigna de frecuencia) 0: Ninguna consigna principal 1: Consigna MOP 2: Consigna analógica (estándar en CUS240S) 3: Frecuencia fija 4 USS en RS232 5: USS en RS485 6: Bus de campo (predeterminado en CUS240S DP y CUS240S DP-F) 7 Consigna analógica 2
P1080 = ? Frecuencia mínima Introducir la frecuencia mínima del motor (en Hz) que puede alcanzar el motor independientemente de la consigna dada para la frecuencia. El valor aquí ajustado es válido tanto con giro en sentido horario como en sentido antihorario.
P1082 = ? Frecuencia máxima Introducir la frecuencia máxima (en Hz) a la que se limita el motor independientemente de la consigna de frecuencia. El valor aquí ajustado es válido tanto con giro en sentido horario como en sentido antihorario.
P1120 = ? Tiempo de aceleración Introducir el tiempo (en segundos) en el que el motor debe acelerar desde el estado de parada hasta la frecuencia máxima del motor P1082. Si se introduce un tiempo de aceleración demasiado breve, puede dispararse una alarma A0501 (límite de corriente) o desconectarse el convertidor con el error F0001 (sobrecorriente).
P1121 = ? Tiempo de parada Introducir el tiempo (en segundos) en el cual el motor va a decelerar (por frenado) desde la frecuencia máxima P1082 hasta la parada. Si se introduce un tiempo de aceleración demasiado breve, puede dispararse una alarma A0501 (límite de corriente) o desconectarse el convertidor con el error F0001 (sobrecorriente) o F0002 (sobretensión).
P1135 = ? Tiempo de parada OFF3 Introducir el tiempo (en segundos) en el cual el motor va a decelerar (por frenado) desde la frecuencia máxima P1082 hasta la parada cuando se dé la orden OFF3 (parada rápida). Si se introduce un tiempo de aceleración demasiado breve, puede dispararse una alarma A0501 (límite de corriente) o desconectarse el convertidor con el error F0001 (sobrecorriente) o F0002 (sobretensión).
P1300=0 Tipo de regulación* Introducir el tipo de regulación necesario 0: U/f con característica lineal

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-23
Parámetros Proceso/descripción(Ajuste de fábrica: bold) Los parámetros con un "*" tienen más posibilidades de ajuste que las descritas más abajo. Ver la lista de parámetros
Ajuste realizado
1: U/f con FCC 2: U/f con característica parabólica 3: U/f con característica programable 20: Regulación vectorial sin encoder 21: Regulación vectorial con encoder 22: Regulación vectorial de par sin encoder
P1500=0 Selección de la consigna de par* (introducir la fuente de consignas de par) 0: Ninguna consigna principal 2: Consigna MOP 4: USS en RS232 5: USS en RS485 6: Bus de campo
P3900 = ? Finalizar la puesta en marcha rápida (QC)* 0: Ninguna puesta en marcha rápida (ningún cálculo del motor) 1: Cálculo del motor y restablecimiento de los valores de fábrica para todos los parámetros que no fueron modificados durante el proceso QC. 2: Cálculo del motor y restablecimiento de los valores de fábrica para todos los ajustes de E/S. 3: Sólo cálculo del motor, los demás parámetros no se restablecen. Nota: Con P3900 = 1, 2 o 3, se ajusta P0340 = 1 y el valor de P1082 se escribe en P2000. Se calculan los datos de motor correspondientes. Durante la finalización de la puesta en marcha rápida se muestra "bUSY" en el OP. Esto significa que se calculan los datos de regulación y que se memorizan los datos correspondientes en la EEPROM. Una vez finalizada la puesta en marcha rápida se ponen P3900 y P0010 a 0.
FIN Fin de la puesta en marcha rápida/ajuste del convertidor Si se tienen que implementar funciones adicionales para el convertidor, proceder según las indicaciones Adaptación a la aplicación yConexiones tecnológicas. Se recomienda seguir este método para motores de dinámica elevada.
Después de la "puesta en marcha rápida" se deberá realizar la "identificación de los datos del motor" y en caso de funcionamiento vectorial (P1300 = 20/21), la "optimización del regulador de velocidad". Para ambos se requiere una orden de conexión. Lectura de los datos del motor
P0010=0 Filtro de parámetros de puesta en marcha*
comprobar si P0010 = 0 (listo)
P1900=3 Seleccionar la lectura de datos del motor* 0: Pasivado 2: Lectura de todos los parámetros en estado de parada. 3: Lectura de todos los parámetros, incluida la curva de saturación, en estado de parada.
Orden de conexión (ON)
Inicio de la identificación de los datos del motor En cuanto P1900 ≠ 0, se emite una alarma A0541 (identificación de los datos del motor activa) que indica que la próxima orden de conexión pondrá en marcha la identificación de los datos del motor. En cuanto se da la orden de conexión, fluye corriente a través del motor y el rotor se alinea. Observación: En cuanto ha finalizado la identificación de los datos del motor, se borra A0541 y P1900 se pone a 0.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-24 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Optimización de la regulación de velocidad P0010=0 Filtro de parámetros de puesta en marcha*
comprobar si P0010 = 0 (listo)
P1960=1 Optimización de la regulación de velocidad 0: Bloqueo 1: Habilitación
Orden de conexión (ON)
Inicio de la optimización del regulador de velocidad Se recomienda una optimización del regulador de velocidad cuando se ha seleccionado funcionamiento vectorial (P1300 = 20 o 21). Si P1960 = 1 se emite una alarma A0542 que indica que la próxima orden de conexión pondrá en marcha la optimización. Si se presenta algún problema de inestabilidad, el accionamiento puede desconectarse con el aviso de fallo F0042 si durante la aceleración no se alcanza un valor estable en un tiempo razonable.0: Observación: En cuanto ha finalizado la optimización del regulador de velocidad, se borra A0542 y P1960 se pone a 0.
2.7.4 Cálculo de los datos del motor y del regulador
Cálculo de los datos del motor y del regulador Los datos internos del motor y del regulador se calculan con ayuda del parámetro P0340, o indirectamente con ayuda del parámetro P3900 o P1910. La función del parámetro P0340 se puede utilizar, por ejemplo, cuando se conocen los datos del circuito equivalente o los valores de los momentos de inercia. En P0340 se pueden realizar los siguientes ajustes:
0 Sin cálculo 1 Parametrización completa 2 Cálculo de los datos del circuito equivalente 3 Cálculo de U/f y de la regulación vectorial 4 Cálculo de los ajustes del regulador
En la parametrización completa (P0340 = 1), además de los parámetros del motor y del regulador también se asignan de antemano parámetros basados en los datos nominales del motor (p. ej. límites de par y magnitudes de referencia para señales de interfaz). En el manual de parámetros aparece una lista completa con todos los parámetros que dependen de P0340. Al calcular los datos del motor/regulador con P0340, existen varios contextos que se pueden abrir a modo de función de los datos conocidos.
Nota Al ejecutar la puesta en marcha rápida con P3900 > 0, P0340 se ajusta internamente en 1 (parametrización completa). Para la lectura de datos del motor, P0340 se ajusta internamente en 3 al terminar la medición.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-25
2.7.5 Cálculo de los datos del motor y del regulador - Tabla de secuencia operacional
Cálculo de los datos del motor y del regulador con el OP Parámetro Descripción Ajuste
realizado P0340 = 1 Cálculo de los parámetros del motor
Este parámetro se necesita durante la puesta en marcha para optimizar el rendimiento del convertidor de frecuencia. En la parametrización completa (P0340 = 1), además de los parámetros del motor y del regulador también se asignan de antemano parámetros basados en los datos nominales del motor (p. ej. límites de par y magnitudes de referencia para señales de interfaz). En la lista de parámetros se exponen los parámetros que se calculan en función del ajuste que tenga P0340. 0: Ningún cálculo 1: Parametrización completa 2: Cálculo de los datos del circuito equivalente 3: Cálculo de U/f y de regulador vectorial 4: Sólo cálculo de los ajustes del regulador
Si se conocen más datos según el catálogo, introducirlos en P0341, P0342 y P0344. P0341 = ? Inercia del motor [kg*m2] P0342 = ? Relación entre inercia total/motor P0344 = ? Peso del motor (introducido en kg) Si se conocen los datos ECD, introducirlos en P0350, P0354, P0356, P0358 y P0360. Si no se conocen los datos ECD: ajustar P0340 = 4 para calcular los ajustes del regulador y saltar a END. P0350 = ? Resistencia del estator (fase-fase) (introducida en Ω).
Resistencia del estator dada en Ω del motor conectado (de fase a fase). Este parámetro contiene también la resistencia de la línea.
P0354 = ? Resistencia del rotor (introducida en Ω) Determina la resistencia del rotor en el circuito equivalente del motor (valor por fase).
P0356 = ? Inductancia de fuga del estator (introducida en mH) Determina la inductancia de fuga del estator en el circuito equivalente del motor (valor por fase).
P0358 = ? Inductancia de fuga del rotor (introducida en mH) Determina la inductancia de fuga del rotor en el circuito equivalente del motor (valor por fase).
P0360 = ? Inductancia principal (introducida en mH) Determina la inductancia principal (inductancia de magnetización) en el circuito equivalente del motor (valor por fase).
P0340 = 3 Cálculo de los parámetros del motor 3: Cálculo de los datos para regulación U/f y vectorial Se calculan todos los parámetros que dependen de los datos ECD y, además, los ajustes del regulador (P0340 = 4).
FIN Los parámetros del motor están calculados. Ahora ya se puede retornar a la parametrización adicional que se explica en la sección "Adaptación a la aplicación".
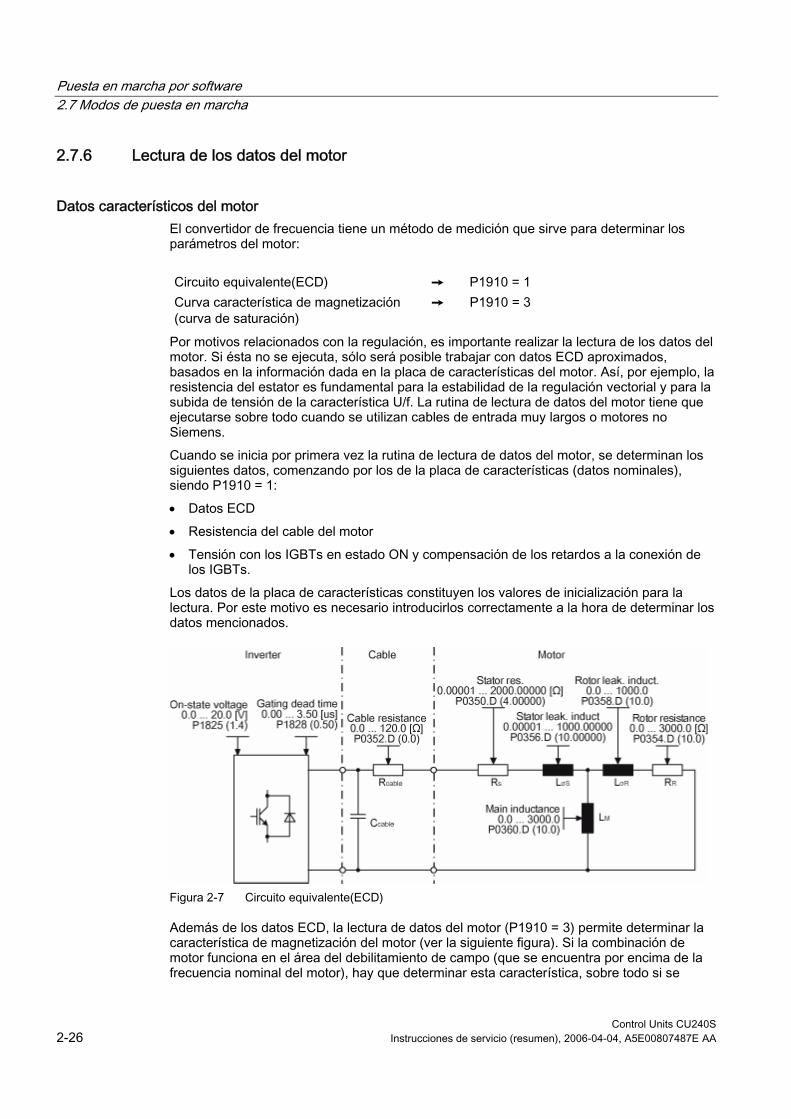
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-26 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.6 Lectura de los datos del motor
Datos característicos del motor El convertidor de frecuencia tiene un método de medición que sirve para determinar los parámetros del motor:
Circuito equivalente(ECD) P1910 = 1 Curva característica de magnetización (curva de saturación)
P1910 = 3
Por motivos relacionados con la regulación, es importante realizar la lectura de los datos del motor. Si ésta no se ejecuta, sólo será posible trabajar con datos ECD aproximados, basados en la información dada en la placa de características del motor. Así, por ejemplo, la resistencia del estator es fundamental para la estabilidad de la regulación vectorial y para la subida de tensión de la característica U/f. La rutina de lectura de datos del motor tiene que ejecutarse sobre todo cuando se utilizan cables de entrada muy largos o motores no Siemens. Cuando se inicia por primera vez la rutina de lectura de datos del motor, se determinan los siguientes datos, comenzando por los de la placa de características (datos nominales), siendo P1910 = 1: • Datos ECD • Resistencia del cable del motor • Tensión con los IGBTs en estado ON y compensación de los retardos a la conexión de
los IGBTs. Los datos de la placa de características constituyen los valores de inicialización para la lectura. Por este motivo es necesario introducirlos correctamente a la hora de determinar los datos mencionados.
Figura 2-7 Circuito equivalente(ECD)
Además de los datos ECD, la lectura de datos del motor (P1910 = 3) permite determinar la característica de magnetización del motor (ver la siguiente figura). Si la combinación de motor funciona en el área del debilitamiento de campo (que se encuentra por encima de la frecuencia nominal del motor), hay que determinar esta característica, sobre todo si se
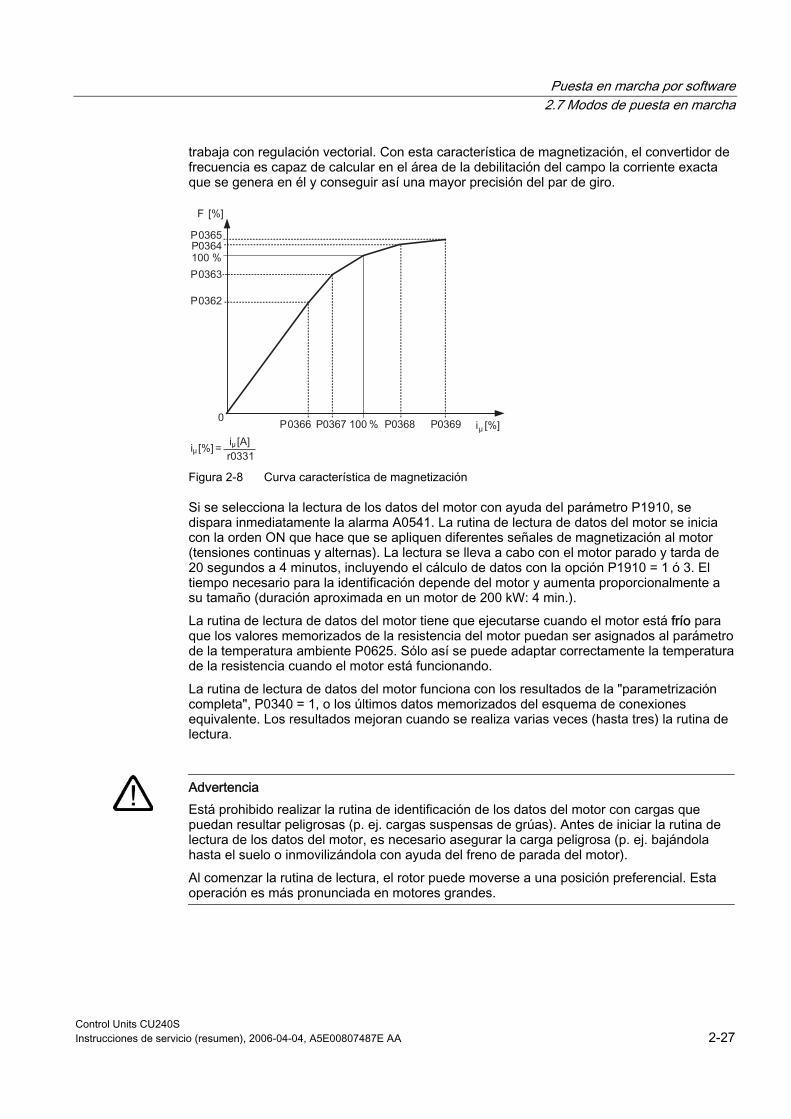
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-27
trabaja con regulación vectorial. Con esta característica de magnetización, el convertidor de frecuencia es capaz de calcular en el área de la debilitación del campo la corriente exacta que se genera en él y conseguir así una mayor precisión del par de giro.
Figura 2-8 Curva característica de magnetización
Si se selecciona la lectura de los datos del motor con ayuda del parámetro P1910, se dispara inmediatamente la alarma A0541. La rutina de lectura de datos del motor se inicia con la orden ON que hace que se apliquen diferentes señales de magnetización al motor (tensiones continuas y alternas). La lectura se lleva a cabo con el motor parado y tarda de 20 segundos a 4 minutos, incluyendo el cálculo de datos con la opción P1910 = 1 ó 3. El tiempo necesario para la identificación depende del motor y aumenta proporcionalmente a su tamaño (duración aproximada en un motor de 200 kW: 4 min.). La rutina de lectura de datos del motor tiene que ejecutarse cuando el motor está frío para que los valores memorizados de la resistencia del motor puedan ser asignados al parámetro de la temperatura ambiente P0625. Sólo así se puede adaptar correctamente la temperatura de la resistencia cuando el motor está funcionando. La rutina de lectura de datos del motor funciona con los resultados de la "parametrización completa", P0340 = 1, o los últimos datos memorizados del esquema de conexiones equivalente. Los resultados mejoran cuando se realiza varias veces (hasta tres) la rutina de lectura.
Advertencia Está prohibido realizar la rutina de identificación de los datos del motor con cargas que puedan resultar peligrosas (p. ej. cargas suspensas de grúas). Antes de iniciar la rutina de lectura de los datos del motor, es necesario asegurar la carga peligrosa (p. ej. bajándola hasta el suelo o inmovilizándola con ayuda del freno de parada del motor). Al comenzar la rutina de lectura, el rotor puede moverse a una posición preferencial. Esta operación es más pronunciada en motores grandes.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-28 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Nota Los datos del circuito equivalente (P0350, P0354, P0356, P0358, P0360) tienen que introducirse a modo de valores por fase, con excepción del parámetro P0350. En este caso, el parámetro P0350 (valor de fase a fase) equivale al doble del valor por fase. La resistencia del cable del motor P0352 está definida como valor por fase. Durante la rutina de lectura se ajustan y se introducen en el parámetro P0350 la resistencia del estator y la resistencia del cable del motor. Si se corrige el parámetro P0352, el convertidor define la resistencia del cable del motor con ayuda de la siguiente fórmula: P0352 = 0,2 * P0350. Si se conoce la resistencia del cable del motor, se puede introducir el valor correspondiente en el parámetro P0352 al concluir la lectura de los datos. La resistencia del estator se reduce conforme al valor introducido, adaptándose con más exactitud a la aplicación concreta. Para ejecutar la rutina de lectura no es necesario bloquear el rotor. No obstante, si existe la posibilidad de bloquearlo durante la lectura (p. ej. con el freno de parada del motor), se recomienda hacerlo para determinar los datos del circuito equivalente. Para comprobar si los datos de la placa de características del motor son correctos, se puede aplicar la siguiente fórmula: PN = √3 ∗ VNΥ ∗ INΥ ∗ cosϕ ∗ η ≈ √3 ∗ VNΔ ∗ INΔ ∗ cosϕ ∗ η Los valores tienen los siguientes significados: PN potencia nominal del motor VN Υ, VN Δ tensión nominal del motor (estrella/triángulo) IN Υ, IN Δ corriente nominal del motor (estrella/triángulo) cosϕ factor de potencia y η rendimiento.
Si se presentan problemas durante la lectura de datos (p. ej. debido a vibraciones del regulador de corriente), comprobar los datos de la placa de características e introducir una corriente de magnetización adecuada en P0320. Acto seguido, reiniciar la rutina de lectura de los datos del motor con P0340 = 1.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-29
2.7.7 Rutina de lectura de datos del motor - Tabla de secuencia operacional
Rutina de lectura de datos del motor - Tabla de secuencia operacional Parámetro o proceso
Descripción(Ajuste de fábrica: en negrita)
P0625 = ? Temperatura ambiente del motor (introducida en °C). La temperatura ambiente del motor se introduce en el momento de leer los datos del motor (ajuste de fábrica: 20 °C). La diferencia entre la temperatura y la temperatura ambiente del motor P0625 tiene que hallarse en un margen de tolerancia de aprox. ± 5 °C. De no ser así, la rutina de lectura no se podrá ejecutar hasta que no esté frío el motor.
¿Se halla la temperatura del motor (P0625) en el margen de tolerancia mencionado? De no ser así, esperar a que se enfríe el motor. P1910 = 1 Seleccionar la lectura de datos del motor
0: Pasivado 1: Indicación de todos los parámetros modificados. Los cambios son transferidos al regulador. 3: Determinación de la característica de magnetización con modificación de parámetros.
Nota: Si P1910 = 1, P0340 se ajusta internamente en 3 y se calculan los datos correspondientes (ver la lista de parámetros P0340). ON Conectar el motor.
La rutina de lectura se tiene que iniciar con una orden ON continua. En este caso, el motor queda orientado y conduce corriente. El diagnóstico se puede ejecutar con r0069 (CO: corrientes de fase). Se emite la alarma A0541 (rutina de lectura de datos del motor activa).
A0541 Al finalizar la rutina de lectura: 1. P1910 se pone a cero (P1910 = 0), 2. A0541 se borra.
OFF1 Para que el convertidor de frecuencia cambie a un estado determinado, primero tiene que darse la orden OFF1.
P1910 = 3 Seleccionar la lectura de datos del motor 0: Pasivado 1: Indicación de todos los parámetros modificados. Los cambios son transferidos al regulador. 3: Determinación de la característica de magnetización con modificación de parámetros.
Nota: Si P1910 = 3, P0340 se ajusta internamente en 2 y se calculan los datos correspondientes (ver la lista de parámetros P0340). ON Conectar el motor.
La rutina de lectura se tiene que iniciar con una orden ON continua. A0541 Al finalizar la rutina de lectura:
1. P1910 se pone a cero (P1910 = 0), 2. A0541 se borra.
OFF1 Para que el convertidor de frecuencia cambie a un estado determinado, primero tiene que darse la orden OFF1.
FIN La identificación de los datos del motor ha terminado.
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-30 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8 Puesta en marcha de la aplicación
2.7.8.1 Puesta en marcha de la aplicación
Puesta en marcha de la aplicación Después de concluir la puesta en marcha de la combinación formada por motor y convertidor de frecuencia con ayuda de la función de puesta en marcha rápida, es necesario ajustar los siguientes parámetros y adaptarlos a los requisitos de la aplicación en concreto. Así, por ejemplo, se han de tener en cuenta los siguientes puntos: • Requisitos funcionales del convertidor (p. ej. regulación del proceso con regulador PID) • Valores límite • Requisitos dinámicos • Pares de arranque • Requisitos relacionados con los cambios de carga • Sobrecarga • Diagnóstico Si la aplicación tiene alguna función no incluida en la puesta en marcha rápida, consultar la sección "Función" de este manual o la lista de parámetros.
Nota Según los ajustes de fábrica, las modificaciones de parámetros se almacenan en la memoria volátil (RAM) del convertidor. Para almacenarlas en la EEPROM, se puede seguir uno de los siguientes métodos: • Con P0014 = 1: todas las modificaciones se memorizan directamente en la EEPROM. • Iniciando la transmisión de la RAM a la EEPROM con P0971 = 1 (si se utliza un OP) con
(en STARTER). La duración de la transferencia de los datos depende de la cantidad de parámetros modificados. En algunos casos puede llegar a tardar varios minutos. Si se utiliza un OP, la transferencia de datos se señaliza con la indicación "bUSY". Si se utiliza STARTER, aparece una barra de progreso. Si la transmisión concluye satisfactoriamente, aparece un aviso en forma de cuadro de diálogo.
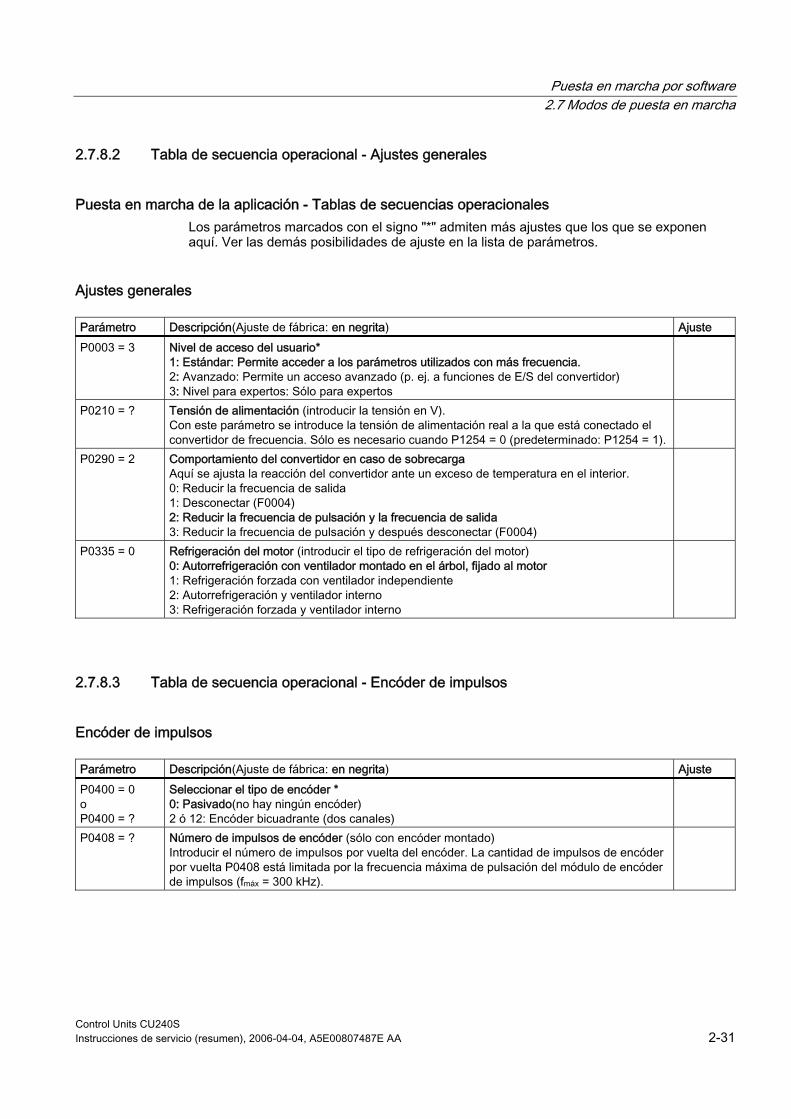
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-31
2.7.8.2 Tabla de secuencia operacional - Ajustes generales
Puesta en marcha de la aplicación - Tablas de secuencias operacionales Los parámetros marcados con el signo "*" admiten más ajustes que los que se exponen aquí. Ver las demás posibilidades de ajuste en la lista de parámetros.
Ajustes generales Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0003 = 3 Nivel de acceso del usuario*
1: Estándar: Permite acceder a los parámetros utilizados con más frecuencia. 2: Avanzado: Permite un acceso avanzado (p. ej. a funciones de E/S del convertidor) 3: Nivel para expertos: Sólo para expertos
P0210 = ? Tensión de alimentación (introducir la tensión en V). Con este parámetro se introduce la tensión de alimentación real a la que está conectado el convertidor de frecuencia. Sólo es necesario cuando P1254 = 0 (predeterminado: P1254 = 1).
P0290 = 2 Comportamiento del convertidor en caso de sobrecarga Aquí se ajusta la reacción del convertidor ante un exceso de temperatura en el interior. 0: Reducir la frecuencia de salida 1: Desconectar (F0004) 2: Reducir la frecuencia de pulsación y la frecuencia de salida 3: Reducir la frecuencia de pulsación y después desconectar (F0004)
P0335 = 0 Refrigeración del motor (introducir el tipo de refrigeración del motor) 0: Autorrefrigeración con ventilador montado en el árbol, fijado al motor 1: Refrigeración forzada con ventilador independiente 2: Autorrefrigeración y ventilador interno 3: Refrigeración forzada y ventilador interno
2.7.8.3 Tabla de secuencia operacional - Encóder de impulsos
Encóder de impulsos Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0400 = 0 o P0400 = ?
Seleccionar el tipo de encóder * 0: Pasivado(no hay ningún encóder) 2 ó 12: Encóder bicuadrante (dos canales)
P0408 = ? Número de impulsos de encóder (sólo con encóder montado) Introducir el número de impulsos por vuelta del encóder. La cantidad de impulsos de encóder por vuelta P0408 está limitada por la frecuencia máxima de pulsación del módulo de encóder de impulsos (fmáx = 300 kHz).

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-32 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8.4 Tabla de secuencia operacional - Sensor de temperatura
Sensor de temperatura Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0601 = 0 o P0601 = ?
Sensor de temperatura del motor 0: Ningún sensor(→ P0610) 1: Termistor PTC (→ P0604) 2: KTY84 (→ P0604)
P0604 = ? Temperatura límite del motor Introducir el umbral de alarma de la protección de sobretemperatura del motor. La temperatura de desconexión (valor límite) es el valor con el que se desconecta el convertidor o se reduce Imáx (P0610), lo que siempre sucede con un 10 % por encima del umbral de alarma.
P0610 = 2 Comportamiento ante temperatura I2t del motor (Determina el comportamiento cuando la temperatura del motor llega al umbral de alarma.) 0: Ninguna reacción, sólo una alarma 1: Alarma y reducción de Imáx (hace que se reduzca la frecuencia de salida) 2: Alarma y desconexión (F0011)
Cálculo de la temperatura sin sensor En el modo de regulación vectorial (P1300 = 20/21/22/23), la temperatura se puede calcular sin sensor. En este caso es necesario ajustar los siguientes parámetros.
Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0621= 1 Medición de la temperatura del motor tras el rearranque
0: Ninguna medición 1: ¿Medición de la temperatura con la primera orden "Motor ON" después de una desconexión/reconexión? 2: Medición de la temperatura tras cada conexión del motor.
P0622 = Tiempo de magnetización del motor para medir la temperatura después de medir la resistencia del estator Este parámetro se ocupa con un valor inicial para lo que dura un ciclo de cálculo de la temperatura del motor. Dicho valor depende de la constante de tiempo medida para el rotor. Para obtener un resultado más exacto, este cálculo se puede hacer varias veces.
2.7.8.5 Tabla de secuencia operacional - Fuente de señales de mando
Selección de la fuente de mando Las fuentes de señales de mando disponibles dependen de la CU utilizada. En función de la Control Unit, la fuente de mando está configurada para varios valores predeterminados.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-33
Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0700 = 2/6 Selección de la fuente de señales de mando
Con esta opción se selecciona la fuente digital de señales de mando 0: Ajuste predeterminado de fábrica 1: OP (teclado) 2: Terminal (P0701 a P0709), ajuste de fábrica para CU240S 4: USS a RS232 5: USS a RS485 (no disponible en CU240S DP ni en CU240S DP-F) 6: Bus de campo (P2050 a P02091), ajuste de fábrica para CU240S DP y CU240S DP-F; no disponible en CU240S)
Asignación de funciones de las entradas digitales Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0701 = 1
Borne 5: Entrada digital 0 (DI0)
P0702 = 12 Borne 6: Entrada digital 1 (DI1)
P0703 = 9 Borne 7: Entrada digital 2 (DI2)
P0704 = 15 Borne 8: Entrada digital 3 (DI3)
P0705 = 16 Borne 16: Entrada digital 4 (DI4)
P0706 = 17 Borne 17: Entrada digital 5 (DI5)
Ajustes de fábrica para CU240S
P0707 = 0 Borne 40: Entrada digital 6 (DI6)
P0708 = 0 Borne 41: Entrada digital 7 (DI7)
P0709 = 0 Borne 41: Entrada digital 8 (DI8)
Ajustes de fábrica para CU240S No disponible en CU240S DP-F
Valores posibles para P0701 a P0708 0: Entrada digital pasivada 1: ON/OFF1 2: ON sentido inverso/OFF1 3: OFF2 - parada natural 4: OFF3 - parada rápida con rampa 9: Confirmación de fallo 10: Modo JOG a derecha 11: Modo JOG a izquierda 12: Inversión del sentido de giro 13: MOP arriba (aumentar frecuencia) 14: MOP abajo (reducir frecuencia) 15: Selector de frecuencia fija bit 0 16: Selector de frecuencia fija bit 1 17: Selector de frecuencia fija bit 2 18: Selector de frecuencia fija bit 3 25: Habilitación freno por inyección de c.c. 27: Habilitación PID 2 29: Desconexión externa 2 33: Bloquear consigna adicional de frecuencia99: Habilitar parametrización BICO
P0724 = 3 Tiempo de eliminación de rebote para entradas digitales Ajusta el tiempo de supresión de rebote (tiempo de filtro) empleado para entradas digitales. 0: Ningún tiempo de eliminación de rebote 1: 2,5 ms de eliminación de rebote 2: 8,2 ms de eliminación de rebote 3: 12,3 ms de eliminación de rebote
P9603 = 00 Bornes 62, 63: SLS vía FD1A y FD1B P9603 = 01 Bornes 60, 61: SLS vía FD0A y FD0B P9603 = 02 Bornes 62, 63: SS1 vía FD1A y FD1B P9603 = 03 Bornes 60, 61: SS1 vía FD0A y FD0B P9603 = 04 Bornes 62, 63: STO vía FD1A y FD1B P9603 = 05 Bornes 60, 61: STO vía FD0A y FD0B
No disponible en CU204S ni en CU240S DP
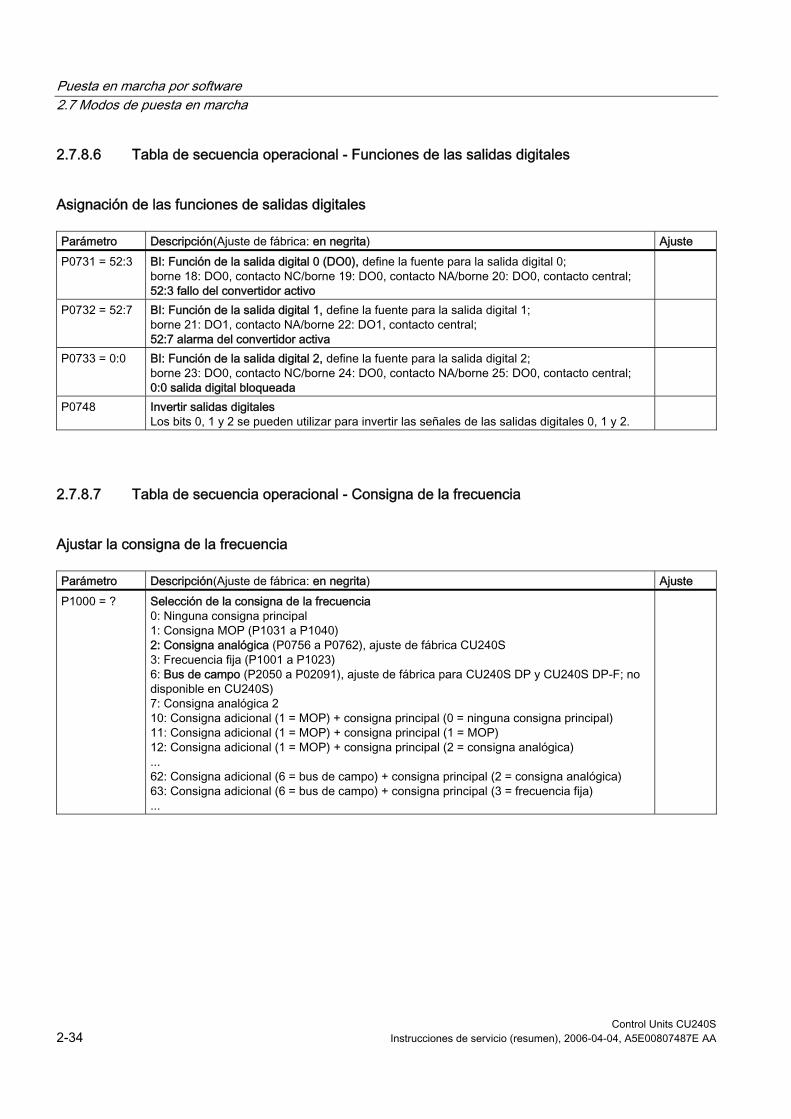
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-34 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8.6 Tabla de secuencia operacional - Funciones de las salidas digitales
Asignación de las funciones de salidas digitales Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0731 = 52:3 BI: Función de la salida digital 0 (DO0), define la fuente para la salida digital 0;
borne 18: DO0, contacto NC/borne 19: DO0, contacto NA/borne 20: DO0, contacto central; 52:3 fallo del convertidor activo
P0732 = 52:7 BI: Función de la salida digital 1, define la fuente para la salida digital 1; borne 21: DO1, contacto NA/borne 22: DO1, contacto central; 52:7 alarma del convertidor activa
P0733 = 0:0 BI: Función de la salida digital 2, define la fuente para la salida digital 2; borne 23: DO0, contacto NC/borne 24: DO0, contacto NA/borne 25: DO0, contacto central; 0:0 salida digital bloqueada
P0748 Invertir salidas digitales Los bits 0, 1 y 2 se pueden utilizar para invertir las señales de las salidas digitales 0, 1 y 2.
2.7.8.7 Tabla de secuencia operacional - Consigna de la frecuencia
Ajustar la consigna de la frecuencia Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1000 = ? Selección de la consigna de la frecuencia
0: Ninguna consigna principal 1: Consigna MOP (P1031 a P1040) 2: Consigna analógica (P0756 a P0762), ajuste de fábrica CU240S 3: Frecuencia fija (P1001 a P1023) 6: Bus de campo (P2050 a P02091), ajuste de fábrica para CU240S DP y CU240S DP-F; no disponible en CU240S) 7: Consigna analógica 2 10: Consigna adicional (1 = MOP) + consigna principal (0 = ninguna consigna principal) 11: Consigna adicional (1 = MOP) + consigna principal (1 = MOP) 12: Consigna adicional (1 = MOP) + consigna principal (2 = consigna analógica) ... 62: Consigna adicional (6 = bus de campo) + consigna principal (2 = consigna analógica) 63: Consigna adicional (6 = bus de campo) + consigna principal (3 = frecuencia fija) ...
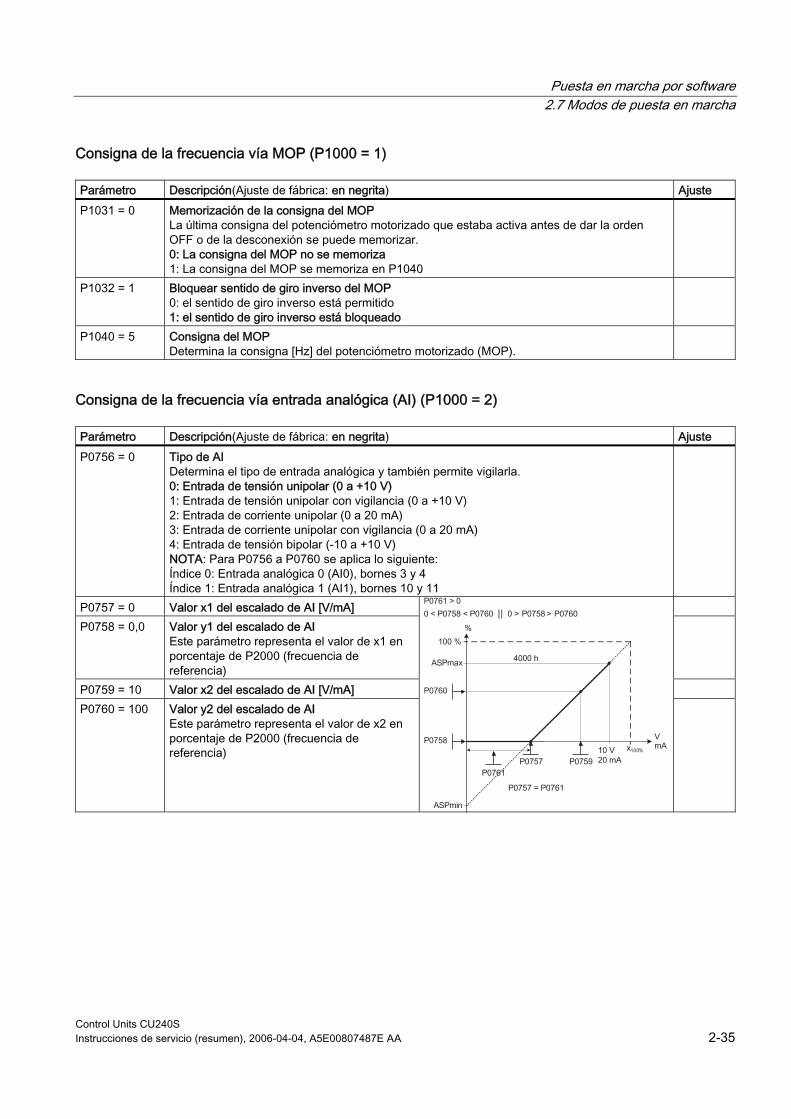
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-35
Consigna de la frecuencia vía MOP (P1000 = 1) Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1031 = 0 Memorización de la consigna del MOP
La última consigna del potenciómetro motorizado que estaba activa antes de dar la orden OFF o de la desconexión se puede memorizar. 0: La consigna del MOP no se memoriza 1: La consigna del MOP se memoriza en P1040
P1032 = 1 Bloquear sentido de giro inverso del MOP 0: el sentido de giro inverso está permitido 1: el sentido de giro inverso está bloqueado
P1040 = 5 Consigna del MOP Determina la consigna [Hz] del potenciómetro motorizado (MOP).
Consigna de la frecuencia vía entrada analógica (AI) (P1000 = 2) Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P0756 = 0 Tipo de AI
Determina el tipo de entrada analógica y también permite vigilarla. 0: Entrada de tensión unipolar (0 a +10 V) 1: Entrada de tensión unipolar con vigilancia (0 a +10 V) 2: Entrada de corriente unipolar (0 a 20 mA) 3: Entrada de corriente unipolar con vigilancia (0 a 20 mA) 4: Entrada de tensión bipolar (-10 a +10 V) NOTA: Para P0756 a P0760 se aplica lo siguiente: Índice 0: Entrada analógica 0 (AI0), bornes 3 y 4 Índice 1: Entrada analógica 1 (AI1), bornes 10 y 11
P0757 = 0 Valor x1 del escalado de AI [V/mA] P0758 = 0,0 Valor y1 del escalado de AI
Este parámetro representa el valor de x1 en porcentaje de P2000 (frecuencia de referencia)
P0759 = 10 Valor x2 del escalado de AI [V/mA] P0760 = 100 Valor y2 del escalado de AI
Este parámetro representa el valor de x2 en porcentaje de P2000 (frecuencia de referencia)
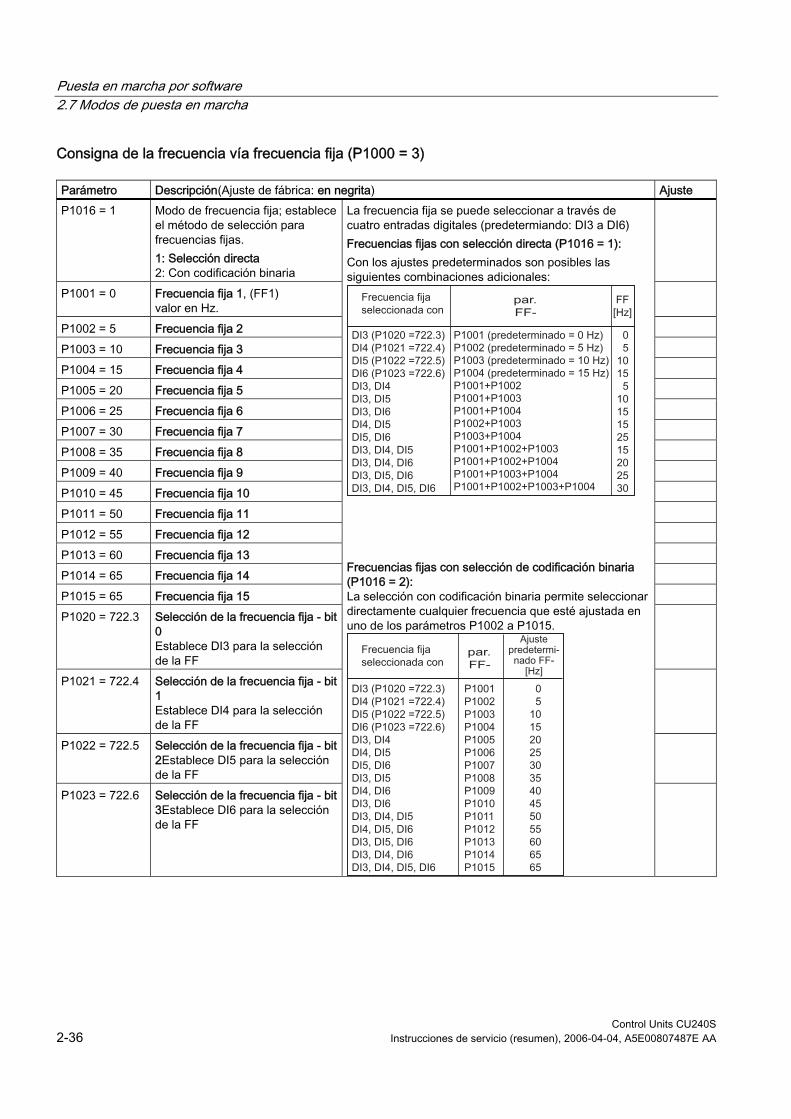
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-36 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Consigna de la frecuencia vía frecuencia fija (P1000 = 3) Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1016 = 1 Modo de frecuencia fija; establece
el método de selección para frecuencias fijas. 1: Selección directa 2: Con codificación binaria
P1001 = 0 Frecuencia fija 1, (FF1) valor en Hz.
P1002 = 5 Frecuencia fija 2 P1003 = 10 Frecuencia fija 3 P1004 = 15 Frecuencia fija 4 P1005 = 20 Frecuencia fija 5 P1006 = 25 Frecuencia fija 6 P1007 = 30 Frecuencia fija 7 P1008 = 35 Frecuencia fija 8 P1009 = 40 Frecuencia fija 9 P1010 = 45 Frecuencia fija 10 P1011 = 50 Frecuencia fija 11 P1012 = 55 Frecuencia fija 12 P1013 = 60 Frecuencia fija 13 P1014 = 65 Frecuencia fija 14 P1015 = 65 Frecuencia fija 15 P1020 = 722.3 Selección de la frecuencia fija - bit
0 Establece DI3 para la selección de la FF
P1021 = 722.4 Selección de la frecuencia fija - bit 1 Establece DI4 para la selección de la FF
P1022 = 722.5 Selección de la frecuencia fija - bit 2Establece DI5 para la selección de la FF
P1023 = 722.6 Selección de la frecuencia fija - bit 3Establece DI6 para la selección de la FF
La frecuencia fija se puede seleccionar a través de cuatro entradas digitales (predetermiando: DI3 a DI6) Frecuencias fijas con selección directa (P1016 = 1): Con los ajustes predeterminados son posibles las siguientes combinaciones adicionales:
P1001 (predeterminado = 0 Hz)P1002 (predeterminado = 5 Hz)P1003 (predeterminado = 10 Hz)P1004 (predeterminado = 15 Hz)P1001+P1002 P1001+P1003P1001+P1004P1002+P1003P1003+P1004P1001+P1002+P1003P1001+P1002+P1004P1001+P1003+P1004P1001+P1002+P1003+P1004
DI3 (P1020 =722.3)DI4 (P1021 =722.4)DI5 (P1022 =722.5)DI6 (P1023 =722.6)DI3, DI4DI3, DI5DI3, DI6DI4, DI5DI5, DI6DI3, DI4, DI5DI3, DI4, DI6DI3, DI5, DI6DI3, DI4, DI5, DI6
05
1015
51015152515202530
Frecuencia fija seleccionada con
par.FF-
Frecuencias fijas con selección de codificación binaria (P1016 = 2): La selección con codificación binaria permite seleccionar directamente cualquier frecuencia que esté ajustada en uno de los parámetros P1002 a P1015.
P1001P1002P1003P1004P1005P1006P1007P1008P1009P1010P1011P1012P1013P1014P1015
DI3 (P1020 =722.3)DI4 (P1021 =722.4)DI5 (P1022 =722.5)DI6 (P1023 =722.6)DI3, DI4DI4, DI5DI5, DI6DI3, DI5DI4, DI6DI3, DI6DI3, DI4, DI5DI4, DI5, DI6DI3, DI5, DI6DI3, DI4, DI6DI3, DI4, DI5, DI6
05
10152025303540455055606565
Frecuencia fija seleccionada con
par.FF-
Ajuste predetermi-nado FF-
[Hz]
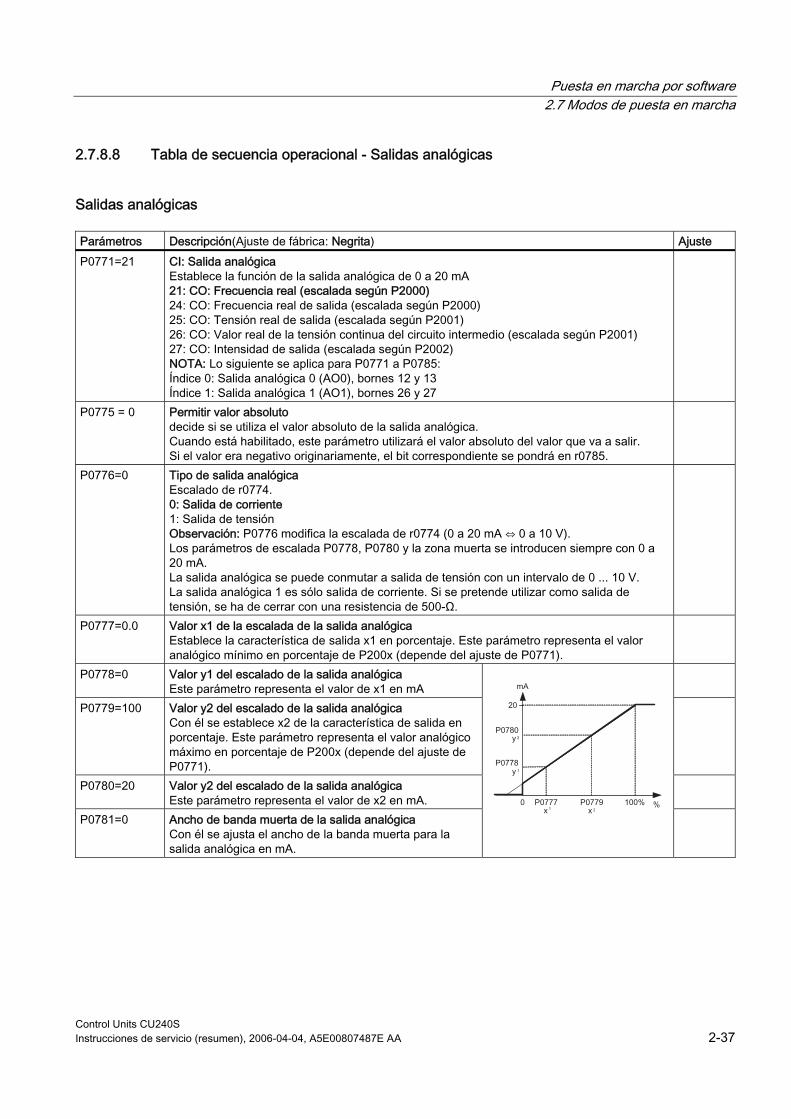
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-37
2.7.8.8 Tabla de secuencia operacional - Salidas analógicas
Salidas analógicas Parámetros Descripción(Ajuste de fábrica: Negrita) Ajuste P0771=21 CI: Salida analógica
Establece la función de la salida analógica de 0 a 20 mA 21: CO: Frecuencia real (escalada según P2000) 24: CO: Frecuencia real de salida (escalada según P2000) 25: CO: Tensión real de salida (escalada según P2001) 26: CO: Valor real de la tensión continua del circuito intermedio (escalada según P2001) 27: CO: Intensidad de salida (escalada según P2002) NOTA: Lo siguiente se aplica para P0771 a P0785: Índice 0: Salida analógica 0 (AO0), bornes 12 y 13 Índice 1: Salida analógica 1 (AO1), bornes 26 y 27
P0775 = 0 Permitir valor absoluto decide si se utiliza el valor absoluto de la salida analógica. Cuando está habilitado, este parámetro utilizará el valor absoluto del valor que va a salir. Si el valor era negativo originariamente, el bit correspondiente se pondrá en r0785.
P0776=0 Tipo de salida analógica Escalado de r0774. 0: Salida de corriente 1: Salida de tensión Observación: P0776 modifica la escalada de r0774 (0 a 20 mA ⇔ 0 a 10 V). Los parámetros de escalada P0778, P0780 y la zona muerta se introducen siempre con 0 a 20 mA. La salida analógica se puede conmutar a salida de tensión con un intervalo de 0 ... 10 V. La salida analógica 1 es sólo salida de corriente. Si se pretende utilizar como salida de tensión, se ha de cerrar con una resistencia de 500-Ω.
P0777=0.0 Valor x1 de la escalada de la salida analógica Establece la característica de salida x1 en porcentaje. Este parámetro representa el valor analógico mínimo en porcentaje de P200x (depende del ajuste de P0771).
P0778=0 Valor y1 del escalado de la salida analógica Este parámetro representa el valor de x1 en mA
P0779=100 Valor y2 del escalado de la salida analógica Con él se establece x2 de la característica de salida en porcentaje. Este parámetro representa el valor analógico máximo en porcentaje de P200x (depende del ajuste de P0771).
P0780=20 Valor y2 del escalado de la salida analógica Este parámetro representa el valor de x2 en mA.
P0781=0 Ancho de banda muerta de la salida analógica Con él se ajusta el ancho de la banda muerta para la salida analógica en mA.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-38 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8.9 Tabla de secuencia operacional - Frecuencia JOG
Frecuencia JOG Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1057 = 1 Habilitación JOG
P1057 = 0 función JOG desactivada P1057 = 1 función JOG habilitada
P1058 = 5 Frecuencia JOG a derecha Frecuencia en Hz para el modo JOG del motor cuando gira en sentido horario.
P1059 = 5 Frecuencia JOG a izquierda Frecuencia en Hz para el modo JOG del motor cuando gira en sentido antihorario.
P1060 = 45 Tiempo de aceleración en modo JOG Tiempo de aceleración en segundos desde 0 hasta la frecuencia máxima (P1082). La aceleración en modo JOG está limitada por P1058 o P1059.
P1061 = 50 Tiempo de parada en modo JOG Tiempo de parada en segundos desde la frecuencia máxima (P1082) hasta 0.
2.7.8.10 Tabla de secuencia operacional - Consignas adicionales
Consignas adicionales Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1074 = 1,0 BI: Bloquear consigna adicional P1075 = 775 CI: Consigna adicional
Establece la fuente de la consigna adicional que se agrega a la consigna principal. Ajustes generales: 755: Consigna de entrada analógica 1024: Consigna de frecuencia fija 1050: Consigna MOP
P1076 = 1,0 CI: Escalado de la consigna adicional Determina la fuente para el escalado de la consigna adicional. Ajustes generales: 1: Escalado 1,0 (100 %) 755: Consigna de entrada analógica 1024: Consigna de frecuencia fija 1050: Consigna MOP
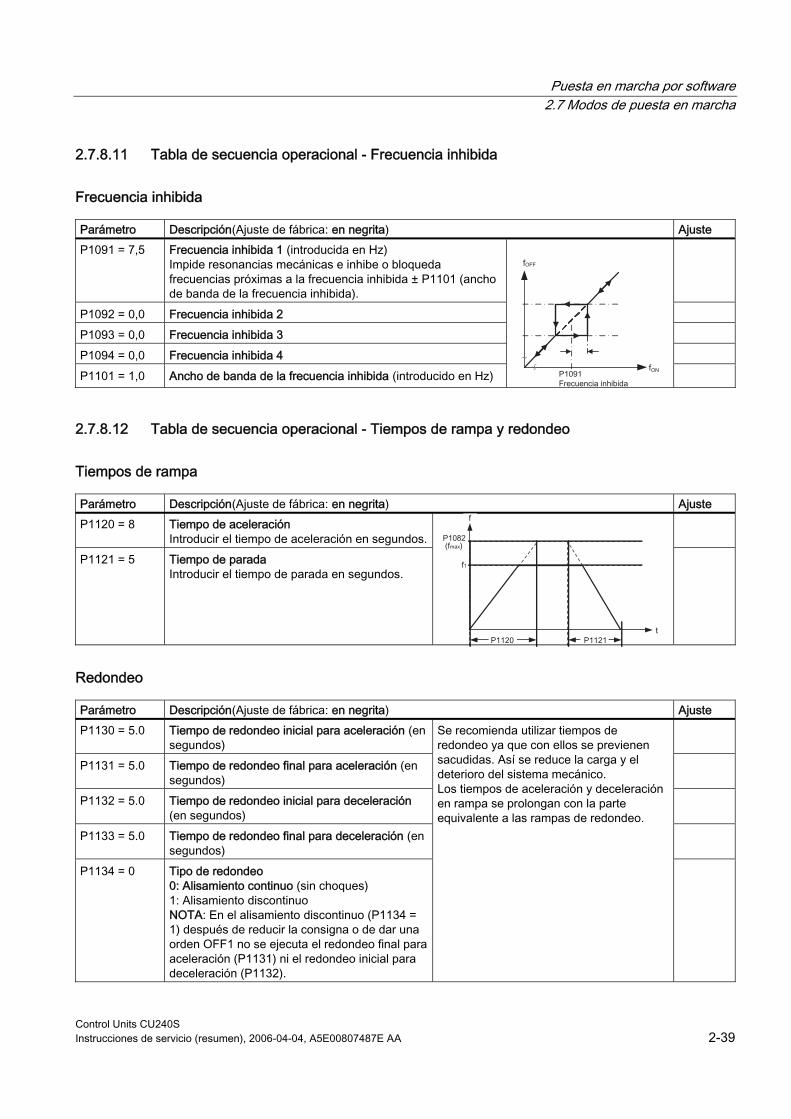
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-39
2.7.8.11 Tabla de secuencia operacional - Frecuencia inhibida
Frecuencia inhibida Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1091 = 7,5 Frecuencia inhibida 1 (introducida en Hz)
Impide resonancias mecánicas e inhibe o bloqueda frecuencias próximas a la frecuencia inhibida ± P1101 (ancho de banda de la frecuencia inhibida).
P1092 = 0,0 Frecuencia inhibida 2 P1093 = 0,0 Frecuencia inhibida 3 P1094 = 0,0 Frecuencia inhibida 4 P1101 = 1,0 Ancho de banda de la frecuencia inhibida (introducido en Hz)
2.7.8.12 Tabla de secuencia operacional - Tiempos de rampa y redondeo
Tiempos de rampa Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1120 = 8 Tiempo de aceleración
Introducir el tiempo de aceleración en segundos.
P1121 = 5 Tiempo de parada Introducir el tiempo de parada en segundos.
Redondeo Parámetro Descripción(Ajuste de fábrica: en negrita) Ajuste P1130 = 5.0 Tiempo de redondeo inicial para aceleración (en
segundos)
P1131 = 5.0 Tiempo de redondeo final para aceleración (en segundos)
P1132 = 5.0 Tiempo de redondeo inicial para deceleración (en segundos)
P1133 = 5.0 Tiempo de redondeo final para deceleración (en segundos)
P1134 = 0 Tipo de redondeo 0: Alisamiento continuo (sin choques) 1: Alisamiento discontinuo NOTA: En el alisamiento discontinuo (P1134 = 1) después de reducir la consigna o de dar una orden OFF1 no se ejecuta el redondeo final para aceleración (P1131) ni el redondeo inicial para deceleración (P1132).
Se recomienda utilizar tiempos de redondeo ya que con ellos se previenen sacudidas. Así se reduce la carga y el deterioro del sistema mecánico. Los tiempos de aceleración y deceleración en rampa se prolongan con la parte equivalente a las rampas de redondeo.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-40 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.7.8.13 Tabla de secuencia operacional - Fin de los ajustes de la aplicación
Parámetros que se han de establecer antes de finalizar los ajustes de la aplicación Los siguientes parámetros se tienen que configurar para cada aplicación
Parámetros Descripción(Ajuste de fábrica: Negrita) Ajuste P1800=4 Frecuencia de impulsos (kHz)
La frecuencia de impulsos se puede cambiar en escalones de 2 kHz. Su rango abarca de 2 kHz a 16 kHz. La máxima corriente de salida del convertidor a 50°C se alcanza con 4 kHz. La máxima frecuencia de salida está limitada por la frecuencia de impulsos. Con una frecuencia de impulsos de 2 kHz es posible un servicio de hasta 133 Hz. Si se necesita una frecuencia de salida mayor, también se debería aumentar la frecuencia de impulsos (10 kHz de frecuencia de impulsos - frecuencia de salida máxima de 650 Hz) si no se necesita un funcionamiento con poco nivel de ruido, se puede seleccionar una frecuencia de impulsos menor para evitar las pérdidas del convertidor y las interferencias que envía el convertidor.
P2000=50 Frecuencia de referencia (Hz) la frecuencia de referencia en hertzios corresponde a un valor del 100 %. Este ajuste se debería cambiar si se requiere una frecuencia máxima superior a 50 Hz. Observación: Esta escalada influye en la frecuencia máxima de los valores analógicos. Las frecuencias fijas y los procesos de normalización del potenciómetro motorizado se basan en el 100 %.
P2001=1000 Tensión de referencia (V) La tensión de referencia en voltios (tensión de salida) corresponde a un valor del 100 %. Observación: Este ajuste sólo se debería modificar cuando sea necesario que la potencia salga con otra escalada.
P2002 = ? Corriente de referencia (A) La corriente de referencia en amperios (corriente de salida) corresponde a un valor del 100 %. El ajuste de fábrica es del 200 % de la corriente nominal del motor (P0305). OBSERVACIÓN: Este ajuste sólo se modifica cuando es necesario que la tensión salga con otra escalada.
P2003 = ? Par de referencia (Nm) El par de referencia en newtonmetro corresponde a un valor del 100 %. El ajuste de fábrica es del 200 % del par nominal del motor que se determina a partir de los datos de lmotor para un par del motor constante. Observación: Este ajuste sólo se modifica cuando es necesario que el par salga con otra escalada.
P2004 = ? Potencia de referencia (kW o hp) La potencia de referencia en kW o hp corresponde a un valor del 100 %. El ajuste de fábrica es del 200 % del par nominal del motor con un par constante. Este ajuste sólo debería modificarse cuando sea necesario que la potencia salga con otra escalada.
bUSY (ocupado)
Tan pronto como se da la orden "save" (guardar), se visualiza la indicación "bUSY".
FIN Al terminar la memorización, el visualizador retorna a su forma normal y la parametrización se da por concluida.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-41
Fin de los ajustes de la aplicación Parámetros Descripción(Ajuste de fábrica: Negrita) Ajuste P0971=1 Transferir datos de la RAM a la EEPROM
0: Pasivado 1: Todos los cambios de parámetros se transfieren de la RAM a la EEPROM , lo que significa que dentro del convertidor se guardan de RAM a EEPROM, es decir, en estado no volátil (los datos no se pierden en caso de fallo de la alimentación de corriente). Mientras dura la transferencia de datos, se muestra la indicación "bUSY" en el OP. Al terminar la transmisión, P0970 se ajusta internamente en "0" y se muestra el parámetro "P0970".
2.7.9 Puesta en marcha en serie
2.7.9.1 Puesta en marcha en serie
Sinopsis Se denomina puesta en marcha en serie a la posibilidad de transferir el juego de parámetros de un convertidor a otros, lo que permite una puesta en marcha rápida de las mismas aplicaciones (p. ej. máquinas en serie o convertidores en grupo). La puesta en marcha en serie se divide en los siguientes pasos: • crear un juego de parámetros adecuado • cargar dicho juego de parámetros • descarga del juego de parámetros cargados en el nuevo convertidor Para ejecutar la puesta en marcha en serie tiene que estar disponible un juego de parámetros adecuado. Éste se puede crear parametrizando un convertidor con el OP o con STARTER.
Precaución No se recomienda descargar parámetros entre diferentes Control Units o versiones de firmware. En principio es posible descargar juegos de parámetros de distintos tipos de CU, no obstante el usuario será el responsable de la consistencia del juego de parámetros descargado, ya que los juegos de parámetros pueden diferir entre sí. Por eso, el cliente debe confirmar su responsabilidad en caso de descarga automática confirmando F0395.
Tan pronto como un convertidor dispone de un juego de parámetros adecuado, éste se carga y, en el siguiente paso, se descarga en el otro convertidor con ayuda del OP, con STARTER o con una MMC. En la figura inferior se muestran las diferentes interfaces.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-42 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Figura 2-9 Interfaces para la puesta en marcha en serie
Advertencia Para la puesta en marcha en serie se reinicializan todas las interfaces de datos y también las interfaces digitales y analógicas. Esto provoca una breve perturbación en la transmisión de datos o una conmutación de las salidas digitales. Antes de comenzar la puesta en marcha en serie, es imprescindible asegurar con sumo cuidado las cargas peligrosas que haya. Modo de proceder: • Depositar la carga en el suelo. • O bien, inmovilizar la carga con ayuda del freno de parada del motor.
Nota Descarga manual y automática En una descarga automática se descargan en el convertidor todos los parámetros necesarios, también los de seguridad (sólo en las CU a prueba de errores). El cliente puede iniciar una descarga manual del modo descrito a continuación. En una descarga automática también se descargan en el convertidor los parámetros de seguridad. Con una MMC, la descarga automática sólo se puede realizar durante la primera inicialización o después de cambiar un componente del convertidor (CU o PM). En las siguientes secciones y en el capítulo "Manejo" de este manual se describen los detalles.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-43
2.7.9.2 Puesta en marcha en serie con el OP
Carga y descarga de un juego de parámetros con un OP Sólo se puede cargar un único juego de parámetros de un convertidor para después descargarlo en otro convertidor.
Nota Al cargar y descargar datos (upload/download) hay que tener en cuenta las siguientes limitaciones, que son importantes: • Sólo se puede ejecutar una carga en el OP del juego de parámetros memorizado en la
EEPROM del convertidor de frecuencia. • Los parámetros de seguridad no se pueden cargar en el OP. • Una vez iniciada la operación de carga o descarga ya no se puede interrumpir. • Existe la posibilidad de cargar datos de convertidores con potencias nominales y
tensiones nominales distintas. • Cuando se descargan datos incompatibles con el convertidor, los parámetros al efecto
adoptan los valores predeterminados. • Durante el proceso de carga y descarga parpadea el LED "RDY" (verde). Cuando el
proceso termina satisfactoriamente, el LED "RDY" luce de forma permanente. • Durante el proceso de carga, se sobrescriben todos los datos que se encuentran
almacenados en el OP. • Si la descarga no es satisfactoria, el convertidor no funciona bien y el LED "SF" (rojo)
luce de forma permanente. – Posibles avisos de fallo en caso de descarga no satisfactoria del OP
F0055, F0056, F0057 o F0058 – Posibles avisos de fallo en caso de descarga no satisfactoria de la MMC
F061, F0062 o F0063
Atención Después de cargar y descargar parámetros entre diferentes Control Units, es necesario comprobar los siguientes ajustes:
Modo de proceder para copiar un juego de parámetros de un convertidor a otro:

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-44 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Carga de un juego de parámetros con un OP Requisitos • Se dispone de un convertidor con un juego de parámetros adecuado (convertidor de
carga) • En el convertidor de carga hay tensión de alimentación • En el convertidor de carga se halla en "estado de disponibilidad"
Parámetros Proceso/descripción(Ajuste de fábrica: Negrita) Ajuste Conectar el OP al convertidor; pasos a seguir con el juego de parámetros que se va a cargar: P0003=3 Nivel de acceso del usuario*
1: Estándar: Permite acceder a los parámetros utilizados con más frecuencia 2: Avanzado: Permite un acceso ampliado, p. ej. a las funciones E/S del convertidor 3: Nivel para expertos: Sólo para expertos
P0010=30 Parámetros de puesta en marcha* 0: Listo 1: Puesta en marcha rápida 2: Convertidor 30: Ajuste de fábrica, transmisión de parámetros 95: Puesta en marcha de las funciones de seguridad (sólo en CUs con funciones de seguridad integrada)
P0802 = 1 Transferir datos de la EEPROM : Bloqueado 1: Comenzar la transmisión vía OP 2: Comenzar transmisión vía MMC Durante el proceso de carga, se visualiza la indicación "bUSY" en el OP y el convertidor no responde a ninguna orden.
Una vez finalizada con éxito la carga, P0010 y P0802 se ponen a 0 y la indicación del OP vuelve a Normal. En caso de que la carga no haya sido satisfactoria, se muestra F00055 (fallo al guardar parámetros en el OP) o F00057 (fallo del OP). En este caso vuelva a intentarlo o reponga el ajuste de fábrica.
Cuando la carga finalice satisfactoriamente, separar el OP del convertidor del que se han extraído los datos.
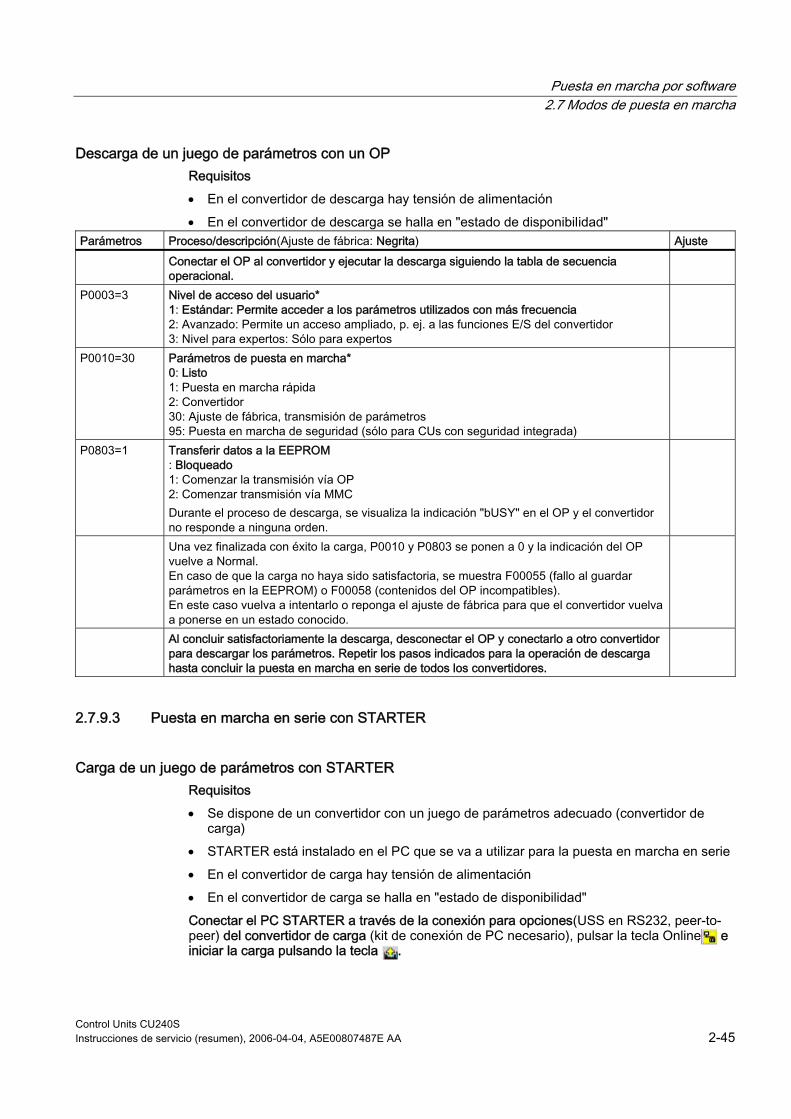
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-45
Descarga de un juego de parámetros con un OP Requisitos • En el convertidor de descarga hay tensión de alimentación • En el convertidor de descarga se halla en "estado de disponibilidad"
Parámetros Proceso/descripción(Ajuste de fábrica: Negrita) Ajuste Conectar el OP al convertidor y ejecutar la descarga siguiendo la tabla de secuencia
operacional.
P0003=3 Nivel de acceso del usuario* 1: Estándar: Permite acceder a los parámetros utilizados con más frecuencia 2: Avanzado: Permite un acceso ampliado, p. ej. a las funciones E/S del convertidor 3: Nivel para expertos: Sólo para expertos
P0010=30 Parámetros de puesta en marcha* 0: Listo 1: Puesta en marcha rápida 2: Convertidor 30: Ajuste de fábrica, transmisión de parámetros 95: Puesta en marcha de seguridad (sólo para CUs con seguridad integrada)
P0803=1 Transferir datos a la EEPROM : Bloqueado 1: Comenzar la transmisión vía OP 2: Comenzar transmisión vía MMC Durante el proceso de descarga, se visualiza la indicación "bUSY" en el OP y el convertidor no responde a ninguna orden.
Una vez finalizada con éxito la carga, P0010 y P0803 se ponen a 0 y la indicación del OP vuelve a Normal. En caso de que la carga no haya sido satisfactoria, se muestra F00055 (fallo al guardar parámetros en la EEPROM) o F00058 (contenidos del OP incompatibles). En este caso vuelva a intentarlo o reponga el ajuste de fábrica para que el convertidor vuelva a ponerse en un estado conocido.
Al concluir satisfactoriamente la descarga, desconectar el OP y conectarlo a otro convertidor para descargar los parámetros. Repetir los pasos indicados para la operación de descarga hasta concluir la puesta en marcha en serie de todos los convertidores.
2.7.9.3 Puesta en marcha en serie con STARTER
Carga de un juego de parámetros con STARTER Requisitos • Se dispone de un convertidor con un juego de parámetros adecuado (convertidor de
carga) • STARTER está instalado en el PC que se va a utilizar para la puesta en marcha en serie • En el convertidor de carga hay tensión de alimentación • En el convertidor de carga se halla en "estado de disponibilidad" Conectar el PC STARTER a través de la conexión para opciones(USS en RS232, peer-to-peer) del convertidor de carga (kit de conexión de PC necesario), pulsar la tecla Online e iniciar la carga pulsando la tecla .

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-46 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Nota Carga con STARTER a la MMC Si se desea cargar un juego de parámetros con STARTER a una MMC, se tienen que ajustar P0010 y P0802 a través de la lista de experto.
Descarga de un juego de parámetros con STARTER Requisitos • En el convertidor de descarga hay tensión de alimentación • En el convertidor de descarga se halla en "estado de disponibilidad" Conectar el PC STARTER a través de la conexión para opciones(USS en RS232, peer-to-peer) del convertidor de descarga (kit de conexión de PC necesario), pulsar la tecla Online e iniciar la descarga pulsando la tecla . El juego de datos tiene que memorizarse en la EEPROM.
Nota Si se desea realizar una descarga manual de un juego de parámetros con STARTER desde una MMC, se tienen que ajustar P0010, P0803 y P0804 a través de la lista de experto.
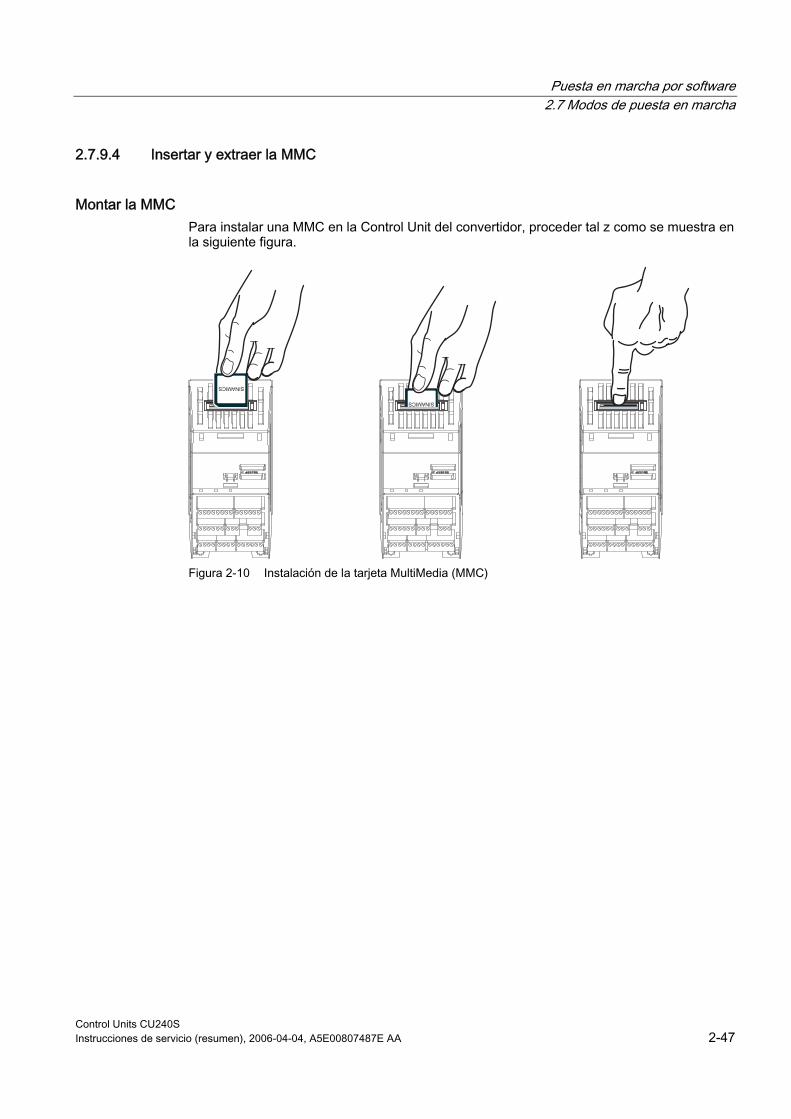
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-47
2.7.9.4 Insertar y extraer la MMC
Montar la MMC Para instalar una MMC en la Control Unit del convertidor, proceder tal z como se muestra en la siguiente figura.
Figura 2-10 Instalación de la tarjeta MultiMedia (MMC)

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-48 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Extraer la MMC Para extraer la MMC de la Control Unit, proceder del siguiente modo: 1. Con un destornillador fino, presionar hacia abajo el botón de desbloqueo que hay junto a
la ranura de la MMC. 2. Tomar la MMC con cuidado y tirar de ella hacia arriba. Esta operación se muestra en la imagen inferior.
Figura 2-11 Extraer la MMC de la Control Unit
2.7.9.5 Puesta en marcha en serie con MMC
Carga y descarga de un juego de parámetros con una MMC Un juego de parámetros se puede cargar de un convertidor para después descargarlo en otro convertidor. Durante el proceso de copia se han de tener en cuenta las siguientes restricciones, que son importantes: • Se dispone de un convertidor con un juego de parámetros adecuado (convertidor de
carga) • Se puede acceder al convertidor de carga con un OP, STARTER o PROFIBUS • Se dispone de una MMC de tipo 6SL3254-0AM00-0AA0.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-49
Carga de un juego de parámetros con una MMC Requisitos Para realizar una puesta en marcha en serie con la MMC, es imprescindible que se cumplan las siguientes condiciones: • En el convertidor de carga hay tensión de alimentación • En el convertidor de carga se halla en "estado de disponibilidad"
Parámetros Proceso/descripción(Ajuste de fábrica: Negrita) Ajuste Insertar la MMC en el convertidor; pasos a seguir con el juego de parámetros que se va a
cargar:
P0010=30 Parámetros de puesta en marcha* 0: Listo 1: Puesta en marcha rápida 2: Convertidor 30: Ajustes de fábrica 95: Puesta en marcha de las funciones de seguridad (sólo en CUs con funciones de seguridad integrada)
P0804 = ? Seleccionar el archivo clon : clone00.bin … 99: clone99.bin
P0802 = 2 Transferir datos de la EEPROM : Bloqueado 1: Comenzar la transmisión vía OP 2: Comenzar transmisión vía MMC
Si el proceso de carga ha finalizado con éxito, P0010 y P0802 se ponen a 0 y el LED "RDY" se ilumina. En caso de que la carga no haya sido satisfactoria (MMC PS no insertado), se muestra F0061 y se ilumina el LED "SF" (rojo). En ese caso inserte una MMC y vuelva a intentar una carga.
Cuando la carga finalice satisfactoriamente, extraer la MMC del convertidor del que se han extraído los datos.
Descarga de un juego de parámetros con una MMC
Nota Durante el proceso de descarga se han de tener en cuenta las siguientes restricciones, que son importantes: • El convertidor no responde a ninguna orden durante el proceso de descarga. • Una vez iniciada la operación de descarga, ésta ya no se puede interrumpir. • Cuando se descargan datos incompatibles con el convertidor, los parámetros al efecto
almacenados en el convertidor adoptan los valores predeterminados. • Si falla la descarga, el convertidor no funciona correctamente.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-50 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Requisitos • En el convertidor de descarga hay tensión de alimentación • El convertidor de descarga se halla en "estado de disponibilidad"
Parámetros Proceso/descripción(Ajuste de fábrica: Negrita) Ajuste Insertar la MMC en el convertidor de descarga y realizar la descarga manual tal y como se
indica en la tabla de secuencia operacional.
P0010=30 Parámetros de puesta en marcha* 0: Listo 1: Puesta en marcha rápida 2: Convertidor 30: Ajustes de fábrica 95: Puesta en marcha de las funciones de seguridad (sólo en CUs con funciones seguridad integrada)
P0804 = ? El archivo clon(para la descarga) 0: clone00.bin … 99: clone99.bin
P0803=2 Transferir datos a la EEPROM : Bloqueado 1: Comenzar la transmisión vía OP 2: Comenzar transmisión vía MMC
Si el proceso de descarga ha finalizado con éxito, P0010 y P0803 se ponen a 0 y el LED "RDY" se ilumina. En caso de que la descarga no haya sido satisfactoria, se muestra F0061 (MMC PS no insertado) o F0062 (contenidos de MMC no válidos) o F0063 (contenidos MMC incompatibles) y se ilumina el LED "SF" (rojo). En ese caso, inserte una MMC adecuada e intente de nuevo una descarga o reponga el ajuste de fábrica.
Al concluir satisfactoriamente la descarga manual, extraer la MMC del convertidor e insertarla en el siguiente convertidor de descarga. Repetir los pasos indicados para la operación de descarga hasta concluir la puesta en marcha en serie de todos los convertidores.
Descarga (download) automática La descarga automática durante la inicialización se controla a través de P8458. Con la descarga automática se cargan en el convertidor todos los parámetros, incluidos los de seguridad.
Nota MMC para "descarga automática" Para la descarga automática se utiliza siempre el archivo clone00.bin. Por tanto, el usuario ha de procurar que clone00.bin (guardado como "clone00.bin" con STARTER en el PC o a través del ajuste P0804 = 00 con el OP) se encuentre en la MMC utilizada para la descarga automática de parámetros durante la inicialización. De lo contrario no se lleva a cabo la descarga automática.
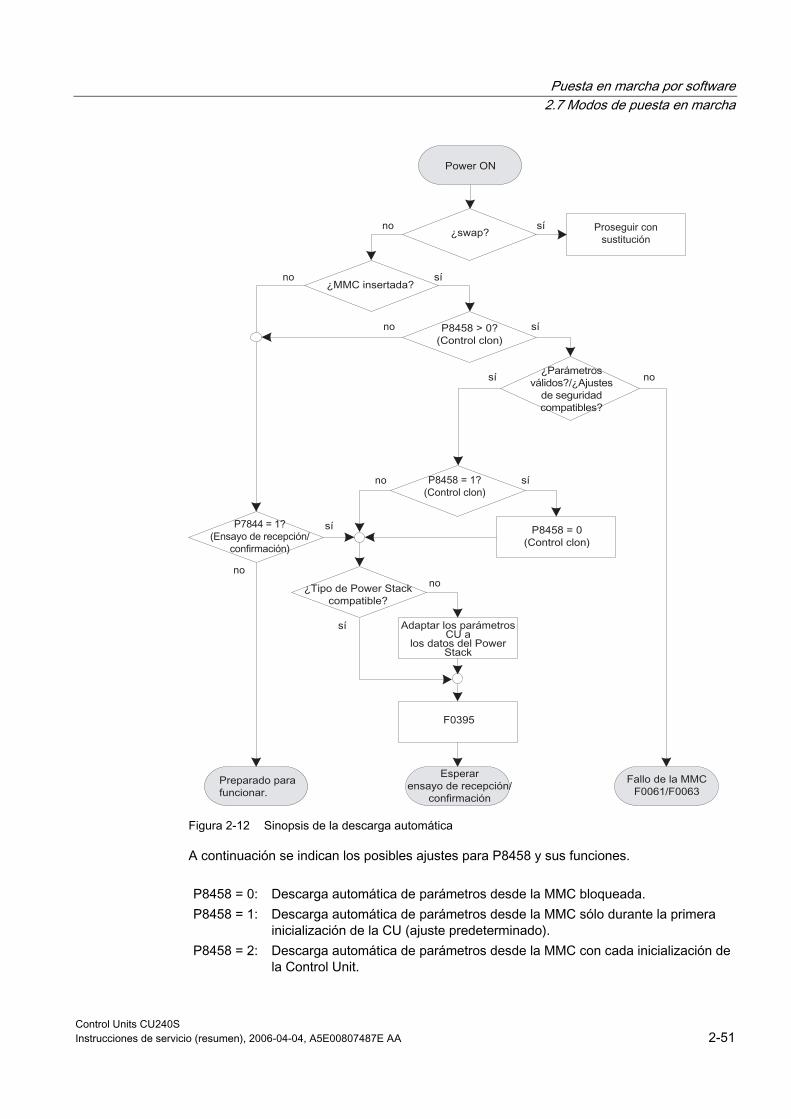
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-51
Figura 2-12 Sinopsis de la descarga automática
A continuación se indican los posibles ajustes para P8458 y sus funciones.
P8458 = 0: Descarga automática de parámetros desde la MMC bloqueada. P8458 = 1: Descarga automática de parámetros desde la MMC sólo durante la primera
inicialización de la CU (ajuste predeterminado). P8458 = 2: Descarga automática de parámetros desde la MMC con cada inicialización de
la Control Unit.
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-52 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Descarga automática realizada con éxito Después de una descarga automática realizada con éxito se muestra F0395. • En las CUs estándar se necesita una confirmación. • Si se trata de CUs con funciones de seguridad integradas, será necesario realizar una
prueba de recepción (aceptación). Confirmación En las CUs estándar se debe comprobar el juego de parámetros actual y confirmar borrando el mensaje F0395. Se puede borrar mediante: • Entrada digital o señal PLC (en función del ajuste de P0700) • Ajuste P7844 = 0.
Advertencia
Es responsabilidad del usuario asegurar que los parámetros guardados en la CU sean los parámetros correctos para la aplicación.
Prueba de aceptación En las CUs con seguridad integrada, es necesario realizar una prueba de aceptación (ver sección "Funciones de seguridad integradas" en este manual). Para borrar F0395 en las CUs con funciones de seguridad integradas se debe proceder del modo siguiente: • P0010=95 • P9761 = contraseña a prueba de errores • P7844 = 0
Error durante la descarga automática Si falla el proceso de descarga automática, la CU vuelve al juego de parámetros guardado antes en la EEPROM y se generan los siguientes números de error:
Tabla 2-17 Números de error para la descarga automática
Número de error
Descripción
F0061 La descarga automática de parámetros no se ha realizado con éxito. F0063 La descarga automática de parámetros no se ha realizado con éxito (p. ej. CU
incorrecta).
En este caso comprobar si la MMC está defectuosa o si existe un juego de parámetros clone00.bin o si el juego de parámetros es válido.

Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-53
2.7.10 Restablecer los ajustes de fábrica de los parámetros
Sinopsis Reponiendo los ajustes de fábrica se alcanza un determinado estado originario de todos los parámetros del convertidor. El estado originario se puede restablecer reponiendo los ajustes de fábrica mediante p0970. Estos valores están identificados con "Def" en la lista de parámetros. Tras reponer los ajustes de fábrica, los convertidores tienen los siguientes ajustes básicos: CUs con interfaz RS485 (ninguna interfaz PROFIBUS) • Control a través de las entradas digitales
– ON/OFF con DI0 – Inversión del sentido de giro con DI1 – Acuse de recibo de fallo con DI2
• Entrada de consigna en la entrada analógica 1 • Salida de señales utilizando las salidas digitales
– Fallo activo con DO0 – Alarma activa con DO0
• Frecuencia real en la salida analógica • La clase de control es la curva característica U/f básica (P1300 = 0) • Motor asíncrono (P0300 = 1). CUs con interfaz PROFIBUS • Para las variantes PROFIBUS las fuentes de señales de mando y de consignas se
establecen en comunicación PROFIBUS. • La clase de control es la curva característica U/f básica (P1300 = 0) • Motor asíncrono (P0300 = 1).
Nota Al restablecer los valores de fábrica de los parámetros, se reinicializa la memoria de transmisión de datos. Esto significa, que durante el proceso de reposición se interrumpe la transmisión de datos.
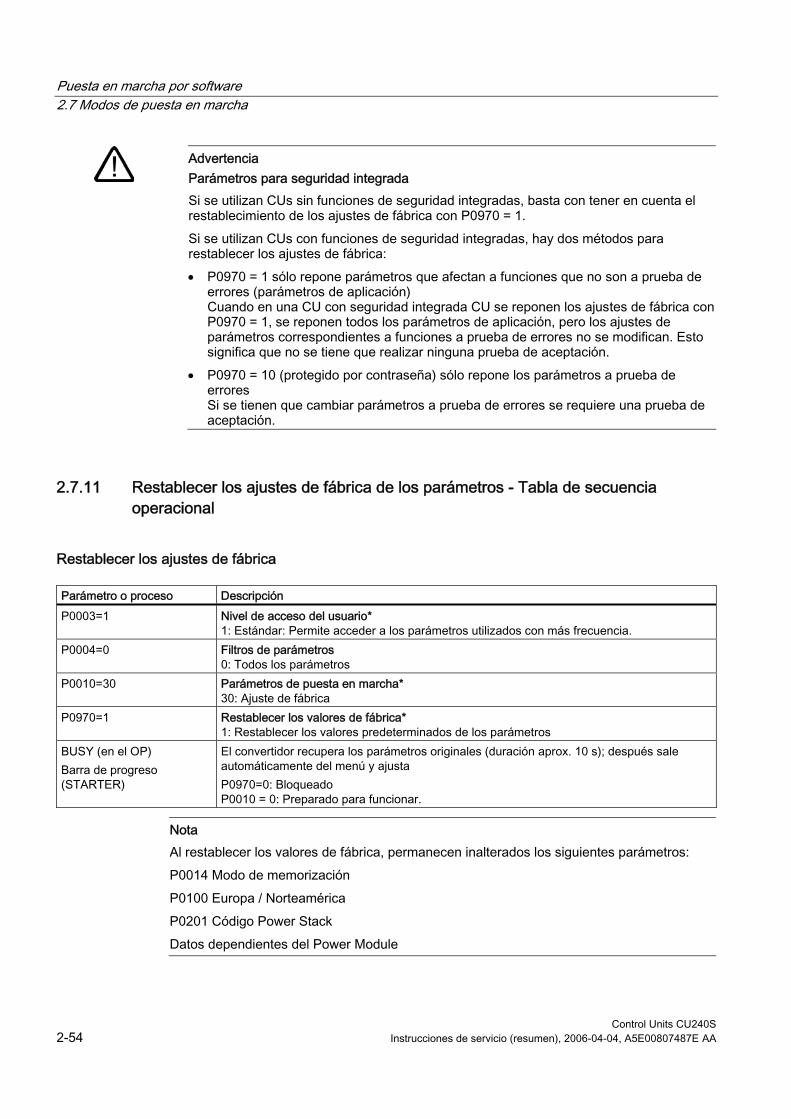
Puesta en marcha por software 2.7 Modos de puesta en marcha
Control Units CU240S 2-54 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Advertencia
Parámetros para seguridad integrada Si se utilizan CUs sin funciones de seguridad integradas, basta con tener en cuenta el restablecimiento de los ajustes de fábrica con P0970 = 1. Si se utilizan CUs con funciones de seguridad integradas, hay dos métodos para restablecer los ajustes de fábrica: • P0970 = 1 sólo repone parámetros que afectan a funciones que no son a prueba de
errores (parámetros de aplicación) Cuando en una CU con seguridad integrada CU se reponen los ajustes de fábrica con P0970 = 1, se reponen todos los parámetros de aplicación, pero los ajustes de parámetros correspondientes a funciones a prueba de errores no se modifican. Esto significa que no se tiene que realizar ninguna prueba de aceptación.
• P0970 = 10 (protegido por contraseña) sólo repone los parámetros a prueba de errores Si se tienen que cambiar parámetros a prueba de errores se requiere una prueba de aceptación.
2.7.11 Restablecer los ajustes de fábrica de los parámetros - Tabla de secuencia operacional
Restablecer los ajustes de fábrica Parámetro o proceso Descripción P0003=1 Nivel de acceso del usuario*
1: Estándar: Permite acceder a los parámetros utilizados con más frecuencia. P0004=0 Filtros de parámetros
0: Todos los parámetros P0010=30 Parámetros de puesta en marcha*
30: Ajuste de fábrica P0970=1 Restablecer los valores de fábrica*
1: Restablecer los valores predeterminados de los parámetros BUSY (en el OP) Barra de progreso (STARTER)
El convertidor recupera los parámetros originales (duración aprox. 10 s); después sale automáticamente del menú y ajusta P0970=0: Bloqueado P0010 = 0: Preparado para funcionar.
Nota Al restablecer los valores de fábrica, permanecen inalterados los siguientes parámetros: P0014 Modo de memorización P0100 Europa / Norteamérica P0201 Código Power Stack Datos dependientes del Power Module
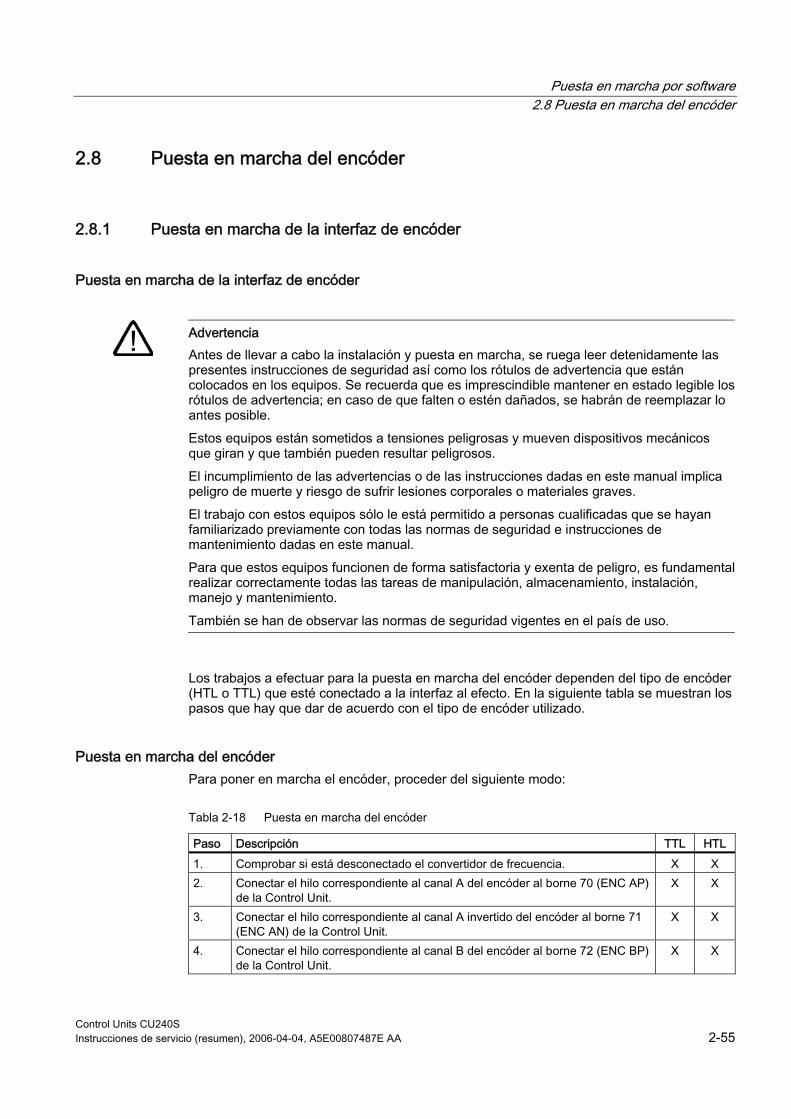
Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-55
2.8 Puesta en marcha del encóder
2.8.1 Puesta en marcha de la interfaz de encóder
Puesta en marcha de la interfaz de encóder
Advertencia Antes de llevar a cabo la instalación y puesta en marcha, se ruega leer detenidamente las presentes instrucciones de seguridad así como los rótulos de advertencia que están colocados en los equipos. Se recuerda que es imprescindible mantener en estado legible los rótulos de advertencia; en caso de que falten o estén dañados, se habrán de reemplazar lo antes posible. Estos equipos están sometidos a tensiones peligrosas y mueven dispositivos mecánicos que giran y que también pueden resultar peligrosos. El incumplimiento de las advertencias o de las instrucciones dadas en este manual implica peligro de muerte y riesgo de sufrir lesiones corporales o materiales graves. El trabajo con estos equipos sólo le está permitido a personas cualificadas que se hayan familiarizado previamente con todas las normas de seguridad e instrucciones de mantenimiento dadas en este manual. Para que estos equipos funcionen de forma satisfactoria y exenta de peligro, es fundamental realizar correctamente todas las tareas de manipulación, almacenamiento, instalación, manejo y mantenimiento. También se han de observar las normas de seguridad vigentes en el país de uso.
Los trabajos a efectuar para la puesta en marcha del encóder dependen del tipo de encóder (HTL o TTL) que esté conectado a la interfaz al efecto. En la siguiente tabla se muestran los pasos que hay que dar de acuerdo con el tipo de encóder utilizado.
Puesta en marcha del encóder Para poner en marcha el encóder, proceder del siguiente modo:
Tabla 2-18 Puesta en marcha del encóder
Paso Descripción TTL HTL 1. Comprobar si está desconectado el convertidor de frecuencia. X X 2. Conectar el hilo correspondiente al canal A del encóder al borne 70 (ENC AP)
de la Control Unit. X X
3. Conectar el hilo correspondiente al canal A invertido del encóder al borne 71 (ENC AN) de la Control Unit.
X X
4. Conectar el hilo correspondiente al canal B del encóder al borne 72 (ENC BP) de la Control Unit.
X X

Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S 2-56 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Paso Descripción TTL HTL 5. Conectar el hilo correspondiente al canal B invertido del encóder al borne 73
(ENC BN) de la Control Unit. X X
6. Conectar el hilo correspondiente al canal Z del encóder al borne 74 (ENC ZP) de la Control Unit.
X X
7. Conectar el hilo correspondiente al canal Z invertido del encóder al borne 75 (ENC ZN) de la Control Unit.
X X
8. Conectar el cable de alimentación positivo al borne 33 (ENC + SUPPLY) de la Control Unit.
X X
9. Conectar el cable de alimentación negativo al borne 28 (U0V) de la Control Unit.
X X
10. Colocar el interruptor DIP general de E/S 4 (5V) en posición ON (TTL). X 11. Colocar el interruptor DIP general de E/S 3 (24 V) en posición ON. (HTL) X 12. Comprobar si todas las conexiones están bien establecidas y si el interruptor
DIP se halla en la posición correcta. X X
13. Conectar el convertidor (ON). X X 14. Ahora es necesario parametrizar la interfaz del encóder. La siguiente sección
contiene una tabla de secuencia operacional con los parámetros necesarios. X X
Nota El cable que va del encóder al módulo de encóder no debe estar cortado. Específico del encóder TTL Cuando se utiliza un encóder con circuito TTL diferencial y se necesita un cable de gran longitud (más de 50 m), los interruptores DIP 5, 6 y 7 se pueden colocar en posición ON. Cuando se trata de un encóder con circuito TTL asimétrico, hay tres hilos para los canales 'A', 'B' y 'Z'. Específico del encóder HTL Cuando se trata de un encóder HTL, no se debe utilizar la resistencia de terminación que se selecciona con los interruptores DIP.
La tensión del encóder es conducida a través de los interruptores DIP generales de E/S 3 y 4. Los ajustes posibles se exponen en la siguiente tabla:

Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-57
Tabla 2-19 Ajustes de la tensión del encóder
ON
OFF
3 4 3 4 3 4 3 4 Tensión de
alimentación del encóder
0 V 24 V 5 V 24 V
Tipo de encóder Ningún encóder Encóder HTL Encóder TTL Encóder HTL
Advertencia Si los interruptores DIP 3 y 4 se encuentran en la posición ON, el encóder es alimentado con una tensión de 24 V. Cuando los interruptores DIP 3 y 4 se encuentran en la posición ON, no debe conectarse ningún encóder TTL al convertidor.
2.8.2 Parametrización de la interfaz del encóder
Parametrización de captadores Para garantizar un funcionamiento correcto del encoder con el convertidor de frecuencia, es necesario modificar los parámetros que se exponen en la siguiente tabla.
Tabla 2-20 Parámetros del encoder
Parámetros
Nombre Valores
r0061 Velocidad del rotor
Especifica la velocidad del rotor. Se utiliza para controlar el funcionamiento correcto del sistema.
r0090 Ángulo del rotor
Especifica el ángulo actual del rotor. Esta función no está disponible en encoders que sólo tienen un canal de entrada.
P0400[3] Tipo de encoder
• 0: Ningún encoder • 2 o 12: Encoder de cuadratura (canal A + B) –
El término "cuadratura" designa dos funciones trigonométricas desplazadas un cuarto de periodo o 90 grados.
Palabra de estado del encoder
Muestra la palabra de estado del encoder en formato de bit:
0 No
r0403
Bit 00 - Módulo de encoder activo 1 Sí

Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S 2-58 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Parámetros
Nombre Valores
0 No Bit 01 - Fallo del encoder 1 Sí 0 No Bit 02 - Señal OK 1 Sí 0 No Bit 03 - Encoder parado, poca velocidad 1 Sí 0 No Bit 05 - Medición de un flanco 1 Sí
P0405 Tipos de impulsos de encoder
Permite seleccionar varios tipos de impulsos. En SINAMICS G120 sólo se utilizan los bits 04 y 05. Ver la lista de parámetros.
P0408[3] Impulsos por vuelta
Indica la cantidad de impulsos de encoder por vuelta.
P0491[3] Comportamiento en caso de no haber señal de velocidad
Selecciona el comportamiento cuando no hay señal de velocidad. Ajustes: No pasar a SLVC 1: Pasar a SLVC
P0492[3] Diferencia de velocidad admisible
En caso de reconocimiento de pérdida de la señal del encoder a altas velocidades. Establece la desviación admisible de las señales de velocidad calculadas entre las consultas, a partir de la cual se supone la pérdida de la señal de respuesta de velocidad. (Valore estándar = calculado a partir del momento de inercia, rango de 0 a 100,00) Dependencia: El parámetro se actualiza cuando se ha cambiado el tiempo de puesta en marcha del motor P0345 o cuando se realiza una optimización del regulador de velocidad (P1960 = 1). Existe un retardo fijo de 40 ms antes de que se reaccione a la pérdida de la señal del encoder a alta velocidad. Atención: Si la diferencia de velocidad permitida se ha fijado en 0, se bloquea el reconocimiento de la pérdida del encoder tanto a velocidad elevada como reducida, no se reconoce una pérdida de la señal del encoder. Si se ha bloqueado el reconocimiento de pérdida de señal del encoder y se produce una pérdida de señal, el motor se puede desestabilizar.
P0493[3] Diferencia de velocidad
Diferencia admisible entre encoder y observador.
P0494[3] Retardo a la reacción ante pérdida de velocidad
Se utiliza para el reconocimiento de pérdida de señal del encoder a velocidad reducida Si la velocidad del motor es inferior al valor en P0492, la vigilancia del encoder utiliza un algoritmo par velocidad reducida. Este parámetro define el retardo entre el fallo del encoder a poca velocidad y la reacción al mismo. (Valor estándar = calculado a partir del momento de inercia, rango de 0 a 64.000 s) Dependencia: Este parámetro se actualiza si se cambia el tiempo de aceleración del motor P0345 o cuando se realiza una optimización del circuito regulador de velocidad (P1960 = 1). Atención: Si el retardo está ajustado en 0, la captación del fallo del encoder para velocidad baja queda pasivada y no se detecta la suspensión del encoder (la captación del fallo del encoder para alta
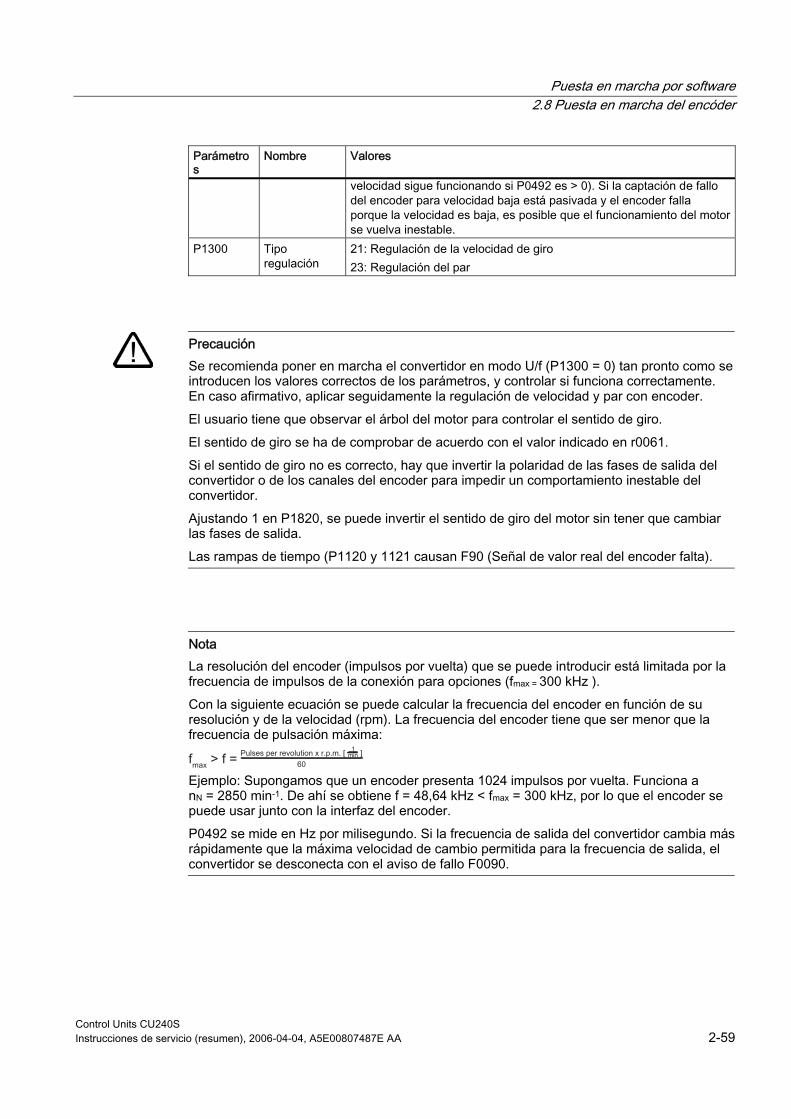
Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 2-59
Parámetros
Nombre Valores
velocidad sigue funcionando si P0492 es > 0). Si la captación de fallo del encoder para velocidad baja está pasivada y el encoder falla porque la velocidad es baja, es posible que el funcionamiento del motor se vuelva inestable.
P1300 Tipo regulación
21: Regulación de la velocidad de giro 23: Regulación del par
Precaución Se recomienda poner en marcha el convertidor en modo U/f (P1300 = 0) tan pronto como se introducen los valores correctos de los parámetros, y controlar si funciona correctamente. En caso afirmativo, aplicar seguidamente la regulación de velocidad y par con encoder. El usuario tiene que observar el árbol del motor para controlar el sentido de giro. El sentido de giro se ha de comprobar de acuerdo con el valor indicado en r0061. Si el sentido de giro no es correcto, hay que invertir la polaridad de las fases de salida del convertidor o de los canales del encoder para impedir un comportamiento inestable del convertidor. Ajustando 1 en P1820, se puede invertir el sentido de giro del motor sin tener que cambiar las fases de salida. Las rampas de tiempo (P1120 y 1121 causan F90 (Señal de valor real del encoder falta).
Nota La resolución del encoder (impulsos por vuelta) que se puede introducir está limitada por la frecuencia de impulsos de la conexión para opciones (fmax = 300 kHz ). Con la siguiente ecuación se puede calcular la frecuencia del encoder en función de su resolución y de la velocidad (rpm). La frecuencia del encoder tiene que ser menor que la frecuencia de pulsación máxima:
Ejemplo: Supongamos que un encoder presenta 1024 impulsos por vuelta. Funciona a nN = 2850 min-1. De ahí se obtiene f = 48,64 kHz < fmax = 300 kHz, por lo que el encoder se puede usar junto con la interfaz del encoder. P0492 se mide en Hz por milisegundo. Si la frecuencia de salida del convertidor cambia más rápidamente que la máxima velocidad de cambio permitida para la frecuencia de salida, el convertidor se desconecta con el aviso de fallo F0090.
Puesta en marcha por software 2.8 Puesta en marcha del encóder
Control Units CU240S 2-60 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
2.8.3 Claves numéricas para los fallos del encóder
Claves numéricas para los fallos del encóder La interfaz de encóder sólo tiene un número de error: F0090. Este estado se presenta cuando se supera la velocidad de cambio de frecuencia ajustada en P0492[3] o cuando se detecta la pérdida del encóder para velocidades bajas.
Nota La causa de la pérdida del encóder se especifica en el parámetro P0949 del nivel 3: P0949 = 1 significa fallo del encóder, canal A o canal B o bien canal A y canal B a alta velocidad (velocidad del árbol > P0492). P0949 = 2 significa fallo del encóder, canal A o bien canal A y canal B a poca velocidad (velocidad del árbol < P0492). P0949 = 7 significa excesiva fluctuación del flujo magnético que puede desestabilizar el motor; puede estar provocada por el fallo del encóder.
Medidas a tomar en caso de avería Si el encóder emite el aviso de fallo F0090, será necesario tomar las siguientes medidas: 1. Comprobar si hay un encóder montado. De no ser así, ajustar P0400 = 0 y seleccionar el
modo SLVC (P1300 = 20 ó 22). 2. Comprobar las conexiones entre el encóder y el convertidor. 3. Asegurarse de que el encóder no presenta ningún fallo (seleccionar P1300 = 0 y poner
en marcha el motor a velocidad constante; después verificar la señal de respuesta del encóder con ayuda de r0061). Comprobar si la velocidad y el sentido de giro son correctos.
4. Aumentar el valor límite para fallo del encóder en P0492. 5. Aumentar el retardo de la captación de fallo del encóder para velocidad baja en P0494.
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 3-1
Funcionamiento 33.1 Comportamiento general de funcionamiento
Sinopsis El comportamiento de funcionamiento y de arranque depende de los ajustes del convertidor durante la puesta en marcha. En esta sección se describen las propiedades de funcionamiento "Comportamiento de arranque normal", "Comportamiento en caso de cambio" así como "Carga y descarga de juegos de parámetros".
3.2 Comportamiento de arranque
Sinopsis Al arrancar el convertidor comprueba si la MMC está insertada o no. Si está insertada y no se ha producido ningún cambio, el arranque se desarrolla según el "comportamiento de arranque normal". Si se ha sustituido un componente (CU o PM), se considera que se trata de un "cambio" y el arranque del convertidor se desarrolla según el "comportamiento en caso de cambio".

Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S 3-2 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
3.2.1 Comportamiento de arranque normal del convertidor
Comportamiento de arranque normal del convertidor Un arranque normal es un arranque después de desconectar y conectar o de una pérdida de tensión. Se puede ejecutar con MMC o sin.
Figura 3-1 arranque normal
Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 3-3
Arranque normal sin MMC Después de un ciclo de carga o corte eléctrico, el convertidor adopta los parámetros de la EEPROM en la memoria RAM.
Arranque normal con MMC Las CUs se han diseñado de tal manera que reconocen automáticamente si hay una MMC en la CU. La interacción entre la CU y la MMC se controla por el parámetro P8458. A continuación se indican los posibles ajustes para P8458 y sus funciones.
P8458 = 0: Ninguna descarga automática de los parámetros de la MMC. P8458 = 1: Descarga automática de parámetros desde la MMC (si existe) sólo durante la
primera inicialización de la CU (ajuste predeterminado). P8458 = 2: Descarga automática de parámetros desde la MMC (si existe) con cada
inicialización de la Control Unit. Tras finalizar la descarga automática se pone a 0 el parámetro P8458 (siempre que no tuviera el valor 1 antes de la descarga), para bloquear el resto de parámetros siguientes ante un bloqueo automático. En este caso, después de la descarga automática de parámetros se puede retirar la MMC. El ajuste P8458 = 1 sólo es relevante para CUs nuevas. Permite al usuario poner en marcha el convertidor mediante una descarga automática de parámetros desde una MMC. Cuando el parámetro P8458 está ajustado a 1 o 2 y no hay ninguna MMC, el convertidor empieza con los parámetros de la EEPROM sin alarmas ni avisos de fallo.
Nota MMC para "descarga automática" Para la descarga automática se utiliza siempre el archivo clone00.bin. Por tanto, el usuario ha de procurar que clone00.bin (guardado como "clone00.bin" con STARTER en el PC o a través del ajuste P0804 = 00 con el OP) se encuentre en la MMC utilizada para la descarga automática de parámetros durante la inicialización. De lo contrario no se lleva a cabo la descarga automática.
Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S 3-4 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Descarga automática realizada con éxito Después de una descarga automática realizada con éxito se muestra F0395. • En las CUs estándar se necesita una confirmación. • Si se trata de CUs con funciones de seguridad integradas, será necesario realizar una
prueba de recepción (aceptación). Confirmación En las CUs estándar se debe comprobar el juego de parámetros actual y confirmar borrando el mensaje F0395. Se puede borrar mediante: • Entrada digital o señal PLC (en función del ajuste de P0700) • Ajuste P7844 = 0.
Advertencia
Es responsabilidad del usuario asegurar que los parámetros guardados en la CU sean los parámetros correctos para la aplicación.
Prueba de recepción (aceptación) En las CUs con seguridad integrada, es necesario realizar una prueba de aceptación (ver sección "Funciones de seguridad integradas" en este manual). Para borrar F0395 en las CUs con funciones de seguridad integradas se debe proceder del modo siguiente: • P0010= 30 • P9761 = contraseña a prueba de errores • P7844 = 0
Error durante la descarga automática Si falla el proceso de descarga automática, la CU vuelve al juego de parámetros guardado antes en la EEPROM y se generan los siguientes números de error:
Tabla 3-1 Números de error para la descarga automática
Número de error
Descripción
F0061 La descarga automática de parámetros no se ha realizado con éxito. F0063 La descarga automática de parámetros no se ha realizado con éxito (p. ej. CU
incorrecta).
En este caso comprobar si la MMC está defectuosa o si existe un juego de parámetros clone00.bin o si el juego de parámetros es válido.

Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 3-5
3.2.2 Comportamiento del convertidor en caso de cambio de una CU o un PM
Comportamiento del convertidor en caso de cambio de una CU o un PM El convertidor SINAMICS G120 abarca Power Modules (PM) y Control Units (CU). Tanto los PMs como las CUs se pueden cambiar, p. ej. para sustituir una pieza defectuosa. La sustitución de una PM o un CU se denomina "cambio" (swap). Se dan las siguientes posibilidades de cambio: • Cambio de PM durante el funcionamiento de la CU (CU se abastece mediante una
fuente de tensión de 24 V externa) • Cambio de CU • Cambio de PM con ciclo de carga de la CU
Nota Una CU estándar no acepta un juego de parámetros de una CPU con funciones a prueba de errores y viceversa.

Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S 3-6 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Figura 3-2 Comportamiento del convertidor en caso de cambio de una CU o un PM
Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 3-7
Cambio del PM durante el funcionamiento de la CU
Precaución Antes de realizar un cambio asegúrese de que todos los parámetros están guardados en la EEPROM de la Control Unit (ver P0014 o P0971).
En este caso se puede sustituir el Power Module sin desconectar y volver a conectar la CU. Se carga un juego de parámetros de la MMC o de la EEPROM de la CU en la RAM de la CU para evitar fallos. Si la sustitución se ha realizado con éxito se muestra F0395, en caso contrario con F0061 o F0063. Ver la siguiente descripción.
Cambio de CU Un cambio de CU provoca siempre la desconexión y reconexión de la CU. A continuación se ha de cargar un juego de parámetros de la MMC o de la EEPROM de la CU en la RAM de la CU. Si se ha insertado una MMC con un juego de parámetros válido, la CU carga el juego de parámetros de la MMC. Si no se ha insertado ninguna MMC, se carga el juego de parámetros de la EEPROM de la CU. Si la sustitución se ha realizado con éxito se muestra F0395, en caso contrario con F0061 o F0063. Ver la siguiente descripción.
Precaución Antes de insertar la Control Unit en el Power Module en caso de cambio, conecte una alimentación de corriente de 24 V a las conexiones.
Advertencia Al realizar un cambio de CU, no se puede sustituir una CU con funciones a prueba de errores por una CU sin funciones a prueba de errores. Al sustituir una CU con funciones a prueba de errores por una CU sin funciones a prueba de errores se pasivan todas las posibles funciones a prueba de errores implementadas; esto puede provocar lesiones y daños en la máquina. El cambio de una CU con funciones a prueba de errores por una CU sin funciones a prueba de errores se debe considerar como una aplicación totalmente nueva.

Funcionamiento 3.2 Comportamiento de arranque
Control Units CU240S 3-8 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Cambio de PM con ciclo de carga El mismo comportamiento que en caso de cambio de CU
Cambio realizado con éxito Después de un cambio realizado con éxito se muestra F0395. • En las CUs estándar se necesita una confirmación. • Si se trata de CUs con funciones de seguridad integradas, será necesario realizar una
prueba de recepción (aceptación). Confirmación En las CUs estándar se debe comprobar el juego de parámetros actual y confirmar borrando el mensaje F0395. Se puede borrar mediante: • Entrada digital o señal PLC (en función del ajuste de P0700) • Ajuste P7844 = 0.
Advertencia
Es responsabilidad del usuario asegurar que los parámetros guardados en la CU sean los parámetros correctos para la aplicación.
Prueba de recepción (aceptación) En las CUs con seguridad integrada, es necesario realizar una prueba de aceptación (ver sección "Funciones de seguridad integradas" en este manual). Para borrar F0395 en las CUs con funciones de seguridad integradas se debe proceder del modo siguiente: • P0010=95 • P9761 = contraseña a prueba de errores • P7844 = 0
Cambio fallido Si falla el proceso de descarga automática, se muestra un cambio fallido. En este caso, la CU vuelve al juego de parámetros guardado antes en la EEPROM y se generan los siguientes números de error:
Tabla 3-2 Números de error para la descarga automática
Número de error
Descripción
F0061 La descarga automática de parámetros no se ha realizado con éxito. F0063 La descarga automática de parámetros no se ha realizado con éxito (p. ej. CU
incorrecta).
En este caso comprobar si la MMC está defectuosa o si existe un juego de parámetros clone00.bin o si el juego de parámetros es válido.
Funcionamiento 3.3 Carga y descarga de juego de parámetros
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 3-9
3.3 Carga y descarga de juego de parámetros
Carga de juegos de parámetros Con una carga, se puede guardar un juego de parámetros en uno de los siguientes dispositivos: • PC (mediante STARTER) • MMC • OP Una carga se puede iniciar mediante • PROFIBUS, • OP • STARTER En el apartado "Puesta en marcha en serie" de la sección Puesta en marcha encontrará una descripción detallada.
Descarga de juegos de parámetros Para la descarga de parámetros es importante distinguir entre las siguientes posibilidades: • Descarga (download) manual • Descarga automática.
Precaución
No se recomienda descargar parámetros entre diferentes Control Units o versiones de firmware. En principio es posible descargar juegos de parámetros de distintos tipos de CU, no obstante el usuario será el responsable de la consistencia del juego de parámetros descargado, ya que los juegos de parámetros pueden diferir entre sí. Por eso, el cliente debe confirmar su responsabilidad en caso de descarga automática confirmando F0395.
Funcionamiento 3.3 Carga y descarga de juego de parámetros
Control Units CU240S 3-10 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Descarga (download) manual De modo similar a la carga, una descarga manual se puede realizar mediante • PC (mediante STARTER) • MMC • OP Se puede iniciar - igual que la carga - mediante • PROFIBUS, • OP • STARTER En una descarga manual se carga en el convertidor un juego de parámetros sin parámetros relevantes de seguridad desde uno de los dispositivos nombrados arriba. En el apartado "Puesta en marcha en serie" de la sección Puesta en marcha encontrará una descripción detallada.
Descarga (download) automática Para realizar una descarga automática, se necesita una MMC. Una descarga automática no se puede realizar desde un PC o la OP. La descarga automática se inicia según los ajustes en P8458 después de la desconexión y reconexión o después de un cambio (ver "Comportamiento de arranque" en esta sección). A diferencia de la descarga manual, en una descarga automática también se cargan los parámetros de seguridad.
Nota Descarga manual y automática En una descarga automática se descargan en el convertidor todos los parámetros necesarios, también los de seguridad (sólo en las CU a prueba de errores). En el apartado "Puesta en marcha en serie" de la sección Puesta en marcha encontrará una descripción detallada. En una descarga automática también se descargan en el convertidor los parámetros de seguridad. Con una MMC, la descarga automática sólo se puede realizar al arrancar o después de cambiar un componente del convertidor (CU o PM). En el apartado "Comportamiento de arranque" de esta sección encontrará una descripción detallada.
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 4-1
Servicio y mantenimiento 44.1 Información sobre servicio técnico y soporte
A&D Technical Support Existen tres centros que ofrecen un servicio de asistencia de 24 h para soporte técnico.
A&D Global service and support
Europa / África (Erlangen) Tel: +49 (180) 5050 222 Fax: +49 (180) 5050 223 E-mail: [email protected]
América (Johnson City) Tel: +1 (423) 262 2552 Fax: +1 (423) 262 2589 E-mail: [email protected]

Servicio y mantenimiento 4.1 Información sobre servicio técnico y soporte
Control Units CU240S 4-2 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Asia/Pacífico (Pekín) Tel: +86 (1064) 757 575 Fax: +86 (1064) 747 474 E-mail: [email protected]
China (Pekín) Tel: +86 (1064) 71 9990 Fax: +86 (1064) 71 9991 E-mail: [email protected]
Servicio técnico y asistencia online En la página web dedicada al servicio técnico se ofrece gran cantidad de información y herramientas de asistencia: http://support.automation.siemens.com
Dirección de contacto Si le surge algún problema al leer este manual, o tiene alguna duda, contacte con Siemens en la siguiente dirección: Siemens AG Automation & Drives A&D SD SPA PM4 Postfach 3269 D-91050 Erlangen Alemania E-mail: [email protected]
Contactos regionales: En caso de dudas relacionadas con el servicio técnico, los precios y condiciones para el soporte técnico, póngase en contacto con el responsable Siemens de su zona:

Servicio y mantenimiento 4.2 Fallos y alarmas
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 4-3
4.2 Fallos y alarmas
Fallos En caso de fallo, el convertidor se apaga y se ilumina el LED rojo "SF". El número de fallo se visualiza vía OP, STARTER o a través de la interfaz de transmisión de datos (siempre que esté establecida la conexión).
Nota Para borrar el número de fallo, se puede aplicar uno de los siguientes métodos: 1. Cortando y volviendo a conectar la alimentación del convertidor. 2. Pulsar la tecla Fn en el OP 3. Utilizando la entrada digital 2 (ajuste predeterminado).
Los avisos de fallo quedan guardados en el parámetro r0947 con su número de código (p. ej. F0003 = 3). El valor correspondiente al fallo se encuentra en el parámetro r0949. Cuando un fallo no tiene asignado ningún valor, se registra el valor 0. En r0948 se puede leer el momento en el que se produjo el fallo y en P0952 el número correspondiente al aviso de error que está guardado en el parámetro r0947. En la lista de parámetros se ofrece una descripción detallada de los avisos de fallo. En las siguientes secciones se describe la indicación de los estados de fallo por medio de LEDs.
Avisos de alarma El número de alarma se visualiza vía OP, STARTER o a través de la interfaz de transmisión de datos (siempre que esté establecida la conexión). Los avisos de alarma quedan guardados en el parámetro r2110 con su número de código (p. ej. A0503 = 503) y se pueden leer en dicho parámetro. En la lista de parámetros se ofrece una descripción detallada de los avisos de alarma.

Servicio y mantenimiento 4.3 Vista general de los LEDs
Control Units CU240S 4-4 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
4.3 Vista general de los LEDs
Indicación de estados mediante LEDs Los convertidores SINAMICSG120 ofrecen numerosas funciones y estados operativos que se pueden señalizar mediante LEDs.
Figura 4-1 LED de estado en la CU240S, CU240S DP, CU240S DP-F
Colores os colores de los LEDs son autoexplicativos. El estado del convertidor se indica con los siguientes colores y estados de los LEDs:
Estado Significado Color
ON OFF Estado transitorio (intermitencia, 0,5Hz)
LED indicador de fallo • SF • BF
Rojo
LED de disponibilidad • RDY
Verde
LED Seguridad • ES • STO, SS1, SLS
Amarillo
Si para un estado determinado no hay diferencia entre que el LED esté apagado o parpadee, se recoge como "no relevante".
Servicio y mantenimiento 4.3 Vista general de los LEDs
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 4-5
Descripción de los LED • LED Fallo del sistema (SF)
El LED "Fallo del sistema" indica un error general del sistema que puede depender del software o del hardware.
• LED Listo (RDY) El LED de disponibilidad indica si el convertidor está listo; para ello se envía una palabra de control. Este LED indica si el accionamiento está en marcha o no. Para tal finalidad es más conveniente utilizar un OP. La información interesante es la velocidad real que se puede visualizar en un OP el cual se puede enchufar y desenchufar en cualquier momento y con toda facilidad durante el servicio.
• LED Fallo del bus (BF) El LED "Fallo del bus" señaliza la aparición de un fallo en el bus. Un fallo de bus se puede describir como una transmisión de datos truncada a causa de las dificultades que las señales encuentran en el propio bus (p. ej. un bloque de PROFIBUS). Tenga en cuenta que los fallos, según la estructura interna de datos del frame de comunicación enviado (p. ej. comprobación CRC del telegrama PROFIsafe), no se identifican como fallo del bus. En consecuencia, este tipo de fallos tienen que ser señalizados por el LED para fallo general. El LED "Fallo del bus" indica los siguientes estados: – LED "Fallo del bus" apagado: ningún fallo en el bus – LED "Fallo del bus" encendido: no hay conexión con el maestro DP (buscando
velocidad de transmisión) – LED "Fallo del bus" parpadeando a 0,5 Hz: Unidad de E/S sin configuración o mal
configurada (velocidad de transmisión encontrada, no hay intercambio de datos) • LED Estado final (ES)
El LED "Estado final" indica si se ha alcanzado el estado final de una función de seguridad iniciada.
• LED "Desconexión segura del par" (STO) El LED "Desconexión segura del par" indica esta función de seguridad.
• LED "Parada segura 1" (SS1) El LED "Parada segura 1" indica esta función de seguridad.
• LED "Velocidad con limitación segura" (SLS) El LED "Velocidad con limitación segura" indica esta función de seguridad.
En la sección Funcionamiento encontrará información sobre las funciones a prueba de errores.
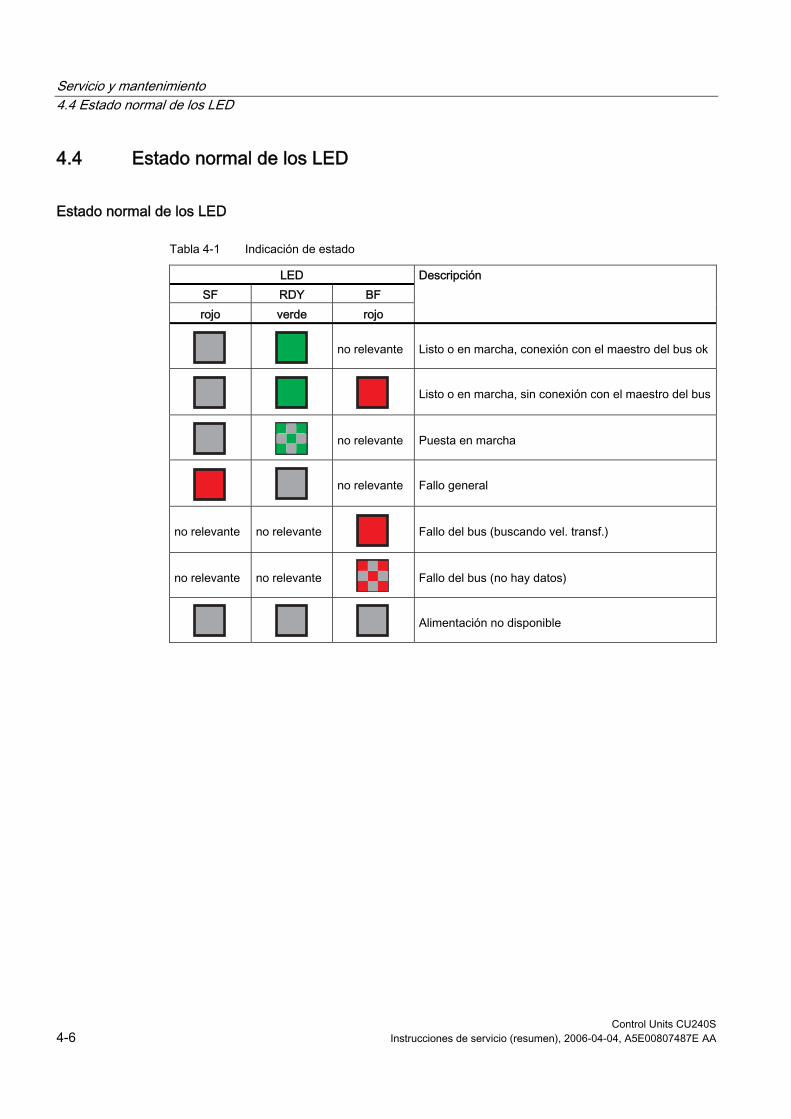
Servicio y mantenimiento 4.4 Estado normal de los LED
Control Units CU240S 4-6 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
4.4 Estado normal de los LED
Estado normal de los LED
Tabla 4-1 Indicación de estado
LED SF RDY BF rojo verde rojo
Descripción
no relevante
Listo o en marcha, conexión con el maestro del bus ok
Listo o en marcha, sin conexión con el maestro del bus
no relevante
Puesta en marcha
no relevante
Fallo general
no relevante
no relevante
Fallo del bus (buscando vel. transf.)
no relevante
no relevante
Fallo del bus (no hay datos)
Alimentación no disponible

Servicio y mantenimiento 4.5 LEDs de estado de las funciones de seguridad
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 4-7
4.5 LEDs de estado de las funciones de seguridad
STO Estados de las funciones de seguridad vía LED
LED SF RDY BF ES STO SS1 SLS
Rojo Verde Rojo Amarillo
Descripción
no relevante
no relevante
no relevante
no relevante
no relevante
STO parametrizada
no relevante
no relevante
no relevante
no relevante
no relevante
STO iniciada
no relevante
no relevante
no relevante
no relevante
no relevante
STO alcanzada
no relevante
no relevante
no relevante
LSTO iniciada
SS1 Estados de las funciones de seguridad vía LED
LED SF RDY BF ES STO SS1 SLS
Rojo Verde Rojo Amarillo
Descripción
no relevante
no relevante
no relevante
SS1 parametrizada
no relevante
no relevante
no relevante
no relevante
no relevante
SS1 iniciada
no relevante
no relevante
no relevante
no relevante
no relevante
SS1 alcanzada
no relevante
no relevante
no relevante
no relevante
STO alcanzada, Estado final para SS1

Servicio y mantenimiento 4.6 Otras indicaciones de los LEDs
Control Units CU240S 4-8 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
SLS Estados de las funciones de seguridad vía LED
LED SF RDY BF ES STO SS1 SLS
Rojo Verde Rojo Amarillo
Descripción
no relevante
no relevante
no relevante
SLS parametrizada
no relevante
no relevante
no relevante
no relevante
no relevante
SLS iniciada
no relevante
no relevante
no relevante
no relevante
no relevante
SLS alcanzada
4.6 Otras indicaciones de los LEDs
Otros estados indicados vía LED
LED SF RDY BF ES STO SS1 SLS
Rojo Verde Rojo Amarillo
Descripción
no relevante
Puesta en marcha de seguridad
no relevante
Actualización de firmware de la MMC
no relevante
Descarga de parámetrosde la MMC
Servicio y mantenimiento 4.7 Eliminación de fallos con el OP
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 4-9
4.7 Eliminación de fallos con el OP
Eliminación de fallos con el OP Si el motor no se pone en marcha después de dar la orden ON, proceder del siguiente modo: • Comprobar si P0010 es = 0. • Comprobar el estado del convertidor por medio de r0052 • Comprobar las fuentes de mando y de consignas (P0700 y P1000) Los avisos de alarma y de fallo se visualizan en el OP en forma de Axxx y Fxxx. Los distintos avisos aparecen detallados en la lista de parámetros.
Nota Los datos del motor tienen que coincidir con los datos del convertidor "Margen de carga" y "Tensión".


Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 5-1
Eliminación de fallos/preguntas más frecuentes 5Indicación de estados mediante LEDs
Los convertidores SINAMICSG120 ofrecen numerosas funciones y estados operativos que se pueden señalizar mediante LEDs.
Figura 5-1 LED de estado en la CU240S, CU240S DP, CU240S DP-F
Colores os colores de los LEDs son autoexplicativos. El estado del convertidor se indica con los siguientes colores y estados de los LEDs:
Estado Significado Color
ON OFF Estado transitorio (intermitencia, 0,5Hz)
LED indicador de fallo • SF • BF
Rojo
LED de disponibilidad • RDY
Verde
LED Seguridad • ES • STO, SS1, SLS
Amarillo

Eliminación de fallos/preguntas más frecuentes
Control Units CU240S 5-2 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Si para un estado determinado no hay diferencia entre que el LED esté apagado o parpadee, se recoge como "no relevante".
Descripción de los LED • LED Fallo del sistema (SF)
El LED "Fallo del sistema" indica un error general del sistema que puede depender del software o del hardware.
• LED Listo (RDY) El LED de disponibilidad indica si el convertidor está listo; para ello se envía una palabra de control. Este LED indica si el accionamiento está en marcha o no. Para tal finalidad es más conveniente utilizar un OP. La información interesante es la velocidad real que se puede visualizar en un OP el cual se puede enchufar y desenchufar en cualquier momento y con toda facilidad durante el servicio.
• LED Fallo del bus (BF) El LED "Fallo del bus" señaliza la aparición de un fallo en el bus. Un fallo de bus se puede describir como una transmisión de datos truncada a causa de las dificultades que las señales encuentran en el propio bus (p. ej. un bloque de PROFIBUS). Tenga en cuenta que los fallos, según la estructura interna de datos del frame de comunicación enviado (p. ej. comprobación CRC del telegrama PROFIsafe), no se identifican como fallo del bus. En consecuencia, este tipo de fallos tienen que ser señalizados por el LED para fallo general. El LED "Fallo del bus" indica los siguientes estados: – LED "Fallo del bus" apagado: ningún fallo en el bus – LED "Fallo del bus" encendido: no hay conexión con el maestro DP (buscando
velocidad de transmisión) – LED "Fallo del bus" parpadeando a 0,5 Hz: Unidad de E/S sin configuración o mal
configurada (velocidad de transmisión encontrada, no hay intercambio de datos) • LED Estado final (ES)
El LED "Estado final" indica si se ha alcanzado el estado final de una función de seguridad iniciada.
• LED "Desconexión segura del par" (STO) El LED "Desconexión segura del par" indica esta función de seguridad.
• LED "Parada segura 1" (SS1) El LED "Parada segura 1" indica esta función de seguridad.
• LED "Velocidad con limitación segura" (SLS) El LED "Velocidad con limitación segura" indica esta función de seguridad.
En la sección Funcionamiento encontrará información sobre las funciones a prueba de errores.
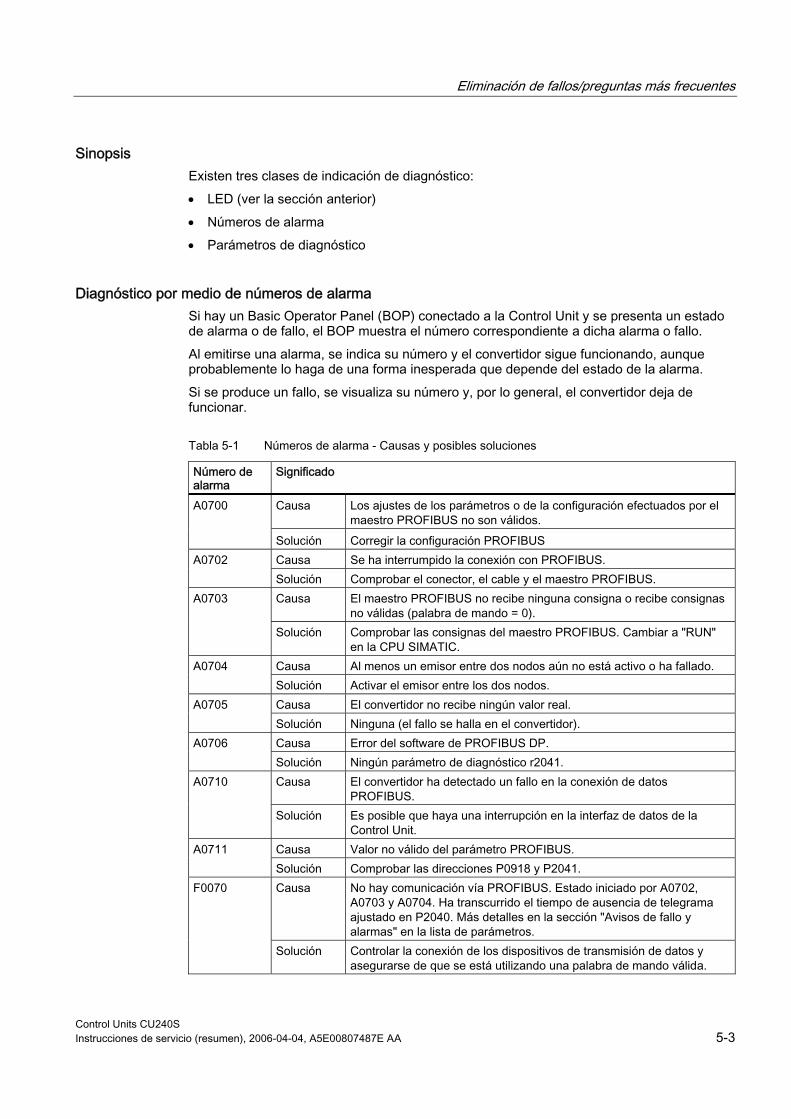
Eliminación de fallos/preguntas más frecuentes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 5-3
Sinopsis Existen tres clases de indicación de diagnóstico: • LED (ver la sección anterior) • Números de alarma • Parámetros de diagnóstico
Diagnóstico por medio de números de alarma Si hay un Basic Operator Panel (BOP) conectado a la Control Unit y se presenta un estado de alarma o de fallo, el BOP muestra el número correspondiente a dicha alarma o fallo. Al emitirse una alarma, se indica su número y el convertidor sigue funcionando, aunque probablemente lo haga de una forma inesperada que depende del estado de la alarma. Si se produce un fallo, se visualiza su número y, por lo general, el convertidor deja de funcionar.
Tabla 5-1 Números de alarma - Causas y posibles soluciones
Número de alarma
Significado
Causa Los ajustes de los parámetros o de la configuración efectuados por el maestro PROFIBUS no son válidos.
A0700
Solución Corregir la configuración PROFIBUS Causa Se ha interrumpido la conexión con PROFIBUS. A0702 Solución Comprobar el conector, el cable y el maestro PROFIBUS. Causa El maestro PROFIBUS no recibe ninguna consigna o recibe consignas
no válidas (palabra de mando = 0). A0703
Solución Comprobar las consignas del maestro PROFIBUS. Cambiar a "RUN" en la CPU SIMATIC.
Causa Al menos un emisor entre dos nodos aún no está activo o ha fallado. A0704 Solución Activar el emisor entre los dos nodos. Causa El convertidor no recibe ningún valor real. A0705 Solución Ninguna (el fallo se halla en el convertidor). Causa Error del software de PROFIBUS DP. A0706 Solución Ningún parámetro de diagnóstico r2041. Causa El convertidor ha detectado un fallo en la conexión de datos
PROFIBUS. A0710
Solución Es posible que haya una interrupción en la interfaz de datos de la Control Unit.
Causa Valor no válido del parámetro PROFIBUS. A0711 Solución Comprobar las direcciones P0918 y P2041. Causa No hay comunicación vía PROFIBUS. Estado iniciado por A0702,
A0703 y A0704. Ha transcurrido el tiempo de ausencia de telegrama ajustado en P2040. Más detalles en la sección "Avisos de fallo y alarmas" en la lista de parámetros.
F0070
Solución Controlar la conexión de los dispositivos de transmisión de datos y asegurarse de que se está utilizando una palabra de mando válida.
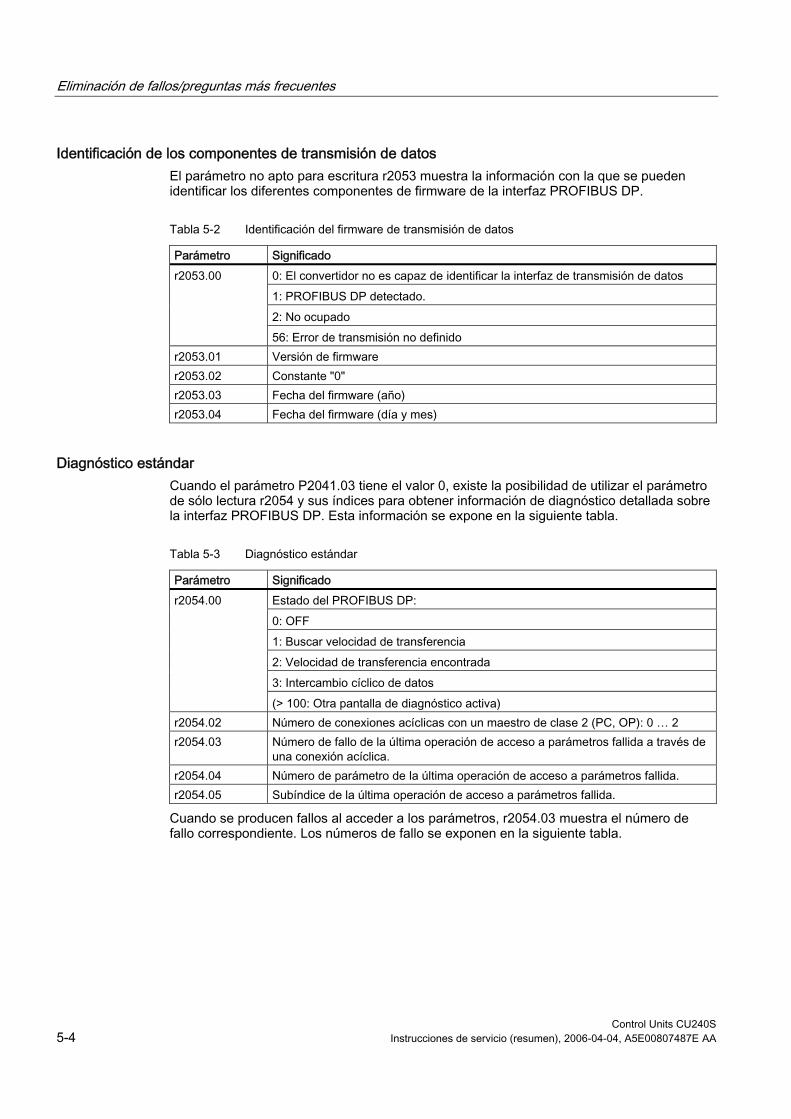
Eliminación de fallos/preguntas más frecuentes
Control Units CU240S 5-4 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Identificación de los componentes de transmisión de datos El parámetro no apto para escritura r2053 muestra la información con la que se pueden identificar los diferentes componentes de firmware de la interfaz PROFIBUS DP.
Tabla 5-2 Identificación del firmware de transmisión de datos
Parámetro Significado 0: El convertidor no es capaz de identificar la interfaz de transmisión de datos 1: PROFIBUS DP detectado. 2: No ocupado
r2053.00
56: Error de transmisión no definido r2053.01 Versión de firmware r2053.02 Constante "0" r2053.03 Fecha del firmware (año) r2053.04 Fecha del firmware (día y mes)
Diagnóstico estándar Cuando el parámetro P2041.03 tiene el valor 0, existe la posibilidad de utilizar el parámetro de sólo lectura r2054 y sus índices para obtener información de diagnóstico detallada sobre la interfaz PROFIBUS DP. Esta información se expone en la siguiente tabla.
Tabla 5-3 Diagnóstico estándar
Parámetro Significado Estado del PROFIBUS DP: 0: OFF 1: Buscar velocidad de transferencia 2: Velocidad de transferencia encontrada 3: Intercambio cíclico de datos
r2054.00
(> 100: Otra pantalla de diagnóstico activa) r2054.02 Número de conexiones acíclicas con un maestro de clase 2 (PC, OP): 0 … 2 r2054.03 Número de fallo de la última operación de acceso a parámetros fallida a través de
una conexión acíclica. r2054.04 Número de parámetro de la última operación de acceso a parámetros fallida. r2054.05 Subíndice de la última operación de acceso a parámetros fallida.
Cuando se producen fallos al acceder a los parámetros, r2054.03 muestra el número de fallo correspondiente. Los números de fallo se exponen en la siguiente tabla.

Eliminación de fallos/preguntas más frecuentes
Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA 5-5
Tabla 5-4 Números de fallo al acceder a parámetros
Número Causa Solución 0 … 199: El acceso a parámetros fue convertido en una solicitud PKW. Fallo detectado en el
convertidor. Más información en r2054.05 y r2054.06: Número de parámetro, palabra de índice
0 Número de parámetro ausente Comprobar el número del bloque de datos
1 El número de parámetro no se puede modificar -- 2 Mínimo/máximo no alcanzado o superado -- 3 Subíndice inexistente Comprobar el offset del bloque
de datos 4 Acceso a valor independiente con signo de
identificación de campo Poner a 0 el offset del bloque de datos
5 Acceso a palabra con solicitud de palabra doble o a la inversa
Usar un tipo de datos correcto (p. ej. INT para palabra, DINT para palabra doble)
6 Ajuste inadmisible (sólo restablecimiento) -- 7 No se puede modificar elemento apto para
escritura --
11 Ningún estado como mando maestro -- 12 Falta palabra clave -- 17 La solicitud no se puede procesar debido al
estado operativo --
101 Número de parámetro actualmente pasivado -- 102 Canal de anchura insuficiente -- 104 Valor de parámetro inadmisible -- 106 Solicitud no implementada -- 200/201 Mínimo o máximo modificado no alcanzado o
superado. El máximo o mínimo se puede limitar aún más durante el funcionamiento
240 … 249: El acceso a parámetros tiene un formato incorrecto. Error detectado en PROFIBUS DP. Más información en r2054.05 y r2054.06: Número de parámetro o número de bloque de datos S7, subíndice u offset de bloque de datos S7.
240 Error en la dirección variable (no hay más información)
Admisible: Margen del bloque de datos
241 El número de bloque de datos tiene un formato incorrecto.
Admisible: 1 … 31999
242 El offset del bloque de datos tiene un formato incorrecto.
Admisible: 0 … 116
243 "Tipo" inadmisible Admisible: CHAR, BITE, INT, WORD, INT, DWORD, REAL
244 "Cantidad de elementos" inadmisible al acceder al valor de parámetro
Admisible: 2 ó 4 bytes, efectivo
248 Modificación inadmisible del texto o la descripción -- 249 Contradicción en la solicitud de escritura: "Tipo" y
"Cantidad de elementos" no coinciden con "Tipo de datos" y "Tamaño de los datos"
Error en el dispositivo de transmisión
250: El acceso a parámetros fue convertido en una solicitud PKW. La reacción del

Eliminación de fallos/preguntas más frecuentes
Control Units CU240S 5-6 Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA
Número Causa Solución convertidor se identifica como incorrecta. Error detectado en PROFIBUS DP. Se puede ver más información en r2054.05 y r2054.06.
250 La reacción PKW no coincide con la solicitud Fallo en el convertidor de frecuencia
251: Error detectado en PROFIBUS DP; no hay más información 251 El tiempo de reacción para el telegrama de
respuesta es muy largo Error en el dispositivo de transmisión
Eliminación de fallos con el OP Si el motor no se pone en marcha después de dar la orden ON, proceder del siguiente modo: • Comprobar si P0010 es = 0. • Comprobar el estado del convertidor por medio de r0052 • Comprobar las fuentes de mando y de consignas (P0700 y P1000) Los avisos de alarma y de fallo se visualizan en el OP en forma de Axxx y Fxxx. Los distintos avisos aparecen detallados en la lista de parámetros.
Nota Los datos del motor tienen que coincidir con los datos del convertidor "Margen de carga" y "Tensión".

Control Units CU240S Instrucciones de servicio (resumen), 2006-04-04, A5E00807487E AA Índice alfabético-1
Índice alfabético
A Ajuste de fábrica, 2-9
Restablecer los, 2-54 Avisos de alarma, 4-3 Avisos de fallo, 4-3
C Cables de mando, 1-4 Cálculo de los datos del mando/motor, 2-24 Carga de parámetros, 2-43, 3-9 Colocar la Control Unit en el Power Module, 1-2
D Descarga de parámetros, 2-43
E Ejemplo de cableado del encóder, 1-11 Eliminación de fallos
con el OP, 4-9, 5-6 Encóder TTL, 2-55 Estado normal de los LED, 4-6
I Indicación de estado, 4-4, 5-1 Interfaz de encóder
Conexiones, 1-10 Preparación, 1-10
L Lectura de los datos del motor, 2-26
M MMC
Carga, 2-49, 3-3
Descarga (download) manual, 2-49 Modificación de parámetros con el Operator Panel, 2-13
O OP, 2-43
P Parámetros
Activo, 2-7 Atributos, 2-3 BICO, 2-4 Carga, 3-9 Change state (cambiar estado), 2-5 División en grupos, 2-7 Juegos de datos, 2-8 Margen de valores, 2-8 Nivel de acceso, 2-5 Puesta en marcha rápida, 2-8 Tipos de datos, 2-5 Unidad, 2-6
Parámetros de vigilancia, 2-3 Power Module
Colocar la Control Unit en el, 1-2 Puesta en marcha, 2-55 Puesta en marcha de la aplicación, 2-30
R Restablecer los ajustes de fábrica, 2-54 Rutina de identificación de los datos del motor, 2-29
S STARTER
Carga, 2-45 Descarga (download), 2-46



Siemens AG
Automation and DrivesStandard DrivesPostfach 32 6991050 ErlangenDeutschland
www.siemens.de/sinamics-g120