control inteligente con lÓgica difusa de un generador...
TRANSCRIPT

UNIVERSIDAD TÉCNICA DE ORURO FACULTAD NACIONAL DE INGENIERÍA
INGENIERÍA ELÉCTRICA E INGENIERÍA ELECTRÓNICA
ELT 4100
CONTROL INTELIGENTE DE UN GENERADOR SINCRÓNICO BASADO
EN LÓGICA DIFUSA
(INFORME DE INVESTIGACIÓN)
MCs. Ing. Armengol Blanco Benito
Oruro, agosto de 2009
i
Índice General
Índice General i Resumen iii I. INTRODUCCIÓN 1
1.1 Planteamiento del Problema 1 1.2 Objetivos 4
1.2.1 Objetivos Generales 4 1.2.2 Objetivos Específicos 4
1.3 Hipótesis 5 1.4 Revisión Bibliográfica 5 1.5 Descripción del Trabajo 10
II MODELACIÓN MATEMÁTICA 11 2.1 Introducción 11 2.2 Modelo Matemático del Generador 11
2.2.1 Modelo Mecánico 11 2.2.2 Modelo Eléctrico 12
2.3 Diagrama de Bloques 14 2.4 Esquema de Control Propuesto 15
III MODELACIÓN DIFUSA 17 3.1 Introducción 17 3.2 Lógica de Aristóteles 17
3.2.1 Conjuntos Clásicos [22] 17 3.3 Lógica Difusa 18
3.3.1 Conjuntos Difusos 19 3.3.2 Variables Lingüísticas 20 3.3.3 Funciones de Pertenencia 21 3.3.4 Operaciones Básicas de Lógica Difusa 21
3.4 Modelos Basados en Lógica Difusa 22 3.5 Modelos Difusos Lingüísticos 23
3.5.1 Fusificación 23 3.5.2 Base de Reglas 24 3.5.3 Motor de Inferencia 24 3.5.4 Desfusificación 26
3.6 Modelos Difusos de Takagi y Sugeno 26 3.6.1 Ventajas de los Modelos Difusos 27
3.7 Sistema de Lógica Difusa 28 3.8 Sistema de Control 28
3.8.1 Sistema de Control de Lazo Cerrado 29 3.9 Diseño de Controladores para Sistema de Control 29 3.10 Controlador Difuso 29
3.10.1 Controlador PID 30 3.10.2 Controlador Difuso PD 31
IV APLICACIÓN 32 4.1 Introducción 32 4.2 MATLAB® 32 4.3 SIMULINK® 32 4.4 Datos del Sistema 33 4.5 Base de Reglas Difusas 34
4.5.1 Base de Reglas Difusa empleadas por el controlador difuso P 34

ii
4.5.2 Base de Reglas Difusa empleadas por el controlador difuso P 35 4.6 Respuesta del Generador 36
4.6.1 Respuesta del generador con un controlador tradicional 36 4.6.2 Respuesta del Generador con un Controlador Inteligente 37
4.7 Análisis de Resultados 44 V CONCLUSIONES Y DESARROLLOS FUTUROS 45
5.1 Introducción 45 5.2 Conclusiones 45 5.3 Desarrollos Futuros 45
Referencias Bibliográficas 47 Anexos 50 Anexo A1 Calculo de Constantes Ki 50
iii
Resumen
En este trabajo, se desarrolla un control inteligente de un generador sincrónico
conectado a una barra infinita.
Para representar el generador sincrónico, se toma el tradicional modelo E”.
Se consideró un controlador difuso PI, por ser el más común, además su rendimiento es
óptimo.
Como desarrollo futuro, se propone la inclusión de un algoritmo genético para la
sintonización de los parámetros del controlador difuso.
El sistema de control propuesto, se implementó en el software Matlab y Simulink para
realizar la simulación.
1
I. INTRODUCCIÓN
1.1 Planteamiento del Problema
La desregulación del sector de la electricidad en el mundo entero a partir del 1990,
implica nuevos desafíos para el control y operación de un sistema eléctrico de potencia
(SEP).
La energía eléctrica, hoy en día, es una forma de energía de mayor consumo final en el
mundo. Por lo que, se hace necesario generar la energía eléctrica, transportarlo y
distribuirlo en forma económica y confiable. Las tensiones en cada una de las barras del
sistema deben ser controladas dentro del margen del ± 10 % respecto al valor nominal
por medio de los reguladores automáticos de tensión que controlan la corriente de
excitación de la excitatriz de los generadores, cambiadores de taps bajo carga de
transformadores y por las fuentes de potencia reactiva distribuidas a lo largo del SEP.
Un SEP es un sistema dinámico y está sujeto a diversas perturbaciones y fallas que
provocan generalmente la salida inesperada de equipos, que alteran el punto de
operación del sistema, con la consiguiente degradación del servicio eléctrico.
Las perturbaciones afectan la operación y control de un SEP, si no se toman acciones
correctivas adecuadas para mitigar el efecto de dichas perturbaciones, pueden conducir
al colapso del sistema. Las perturbaciones consideradas para la presente investigación
son las variaciones abruptas de carga que modifican el perfil de tensiones a niveles
inaceptables en algunas barras del SEP y asimismo la frecuencia. Para responder a estas
variaciones, deben actuar los reguladores de los transformadores, generadores y
turbinas. Las consecuencias de los colapsos, son generalmente catastróficas, las que se
pueden manifestar como pérdidas económicas, desgracias humanas, etc.
Un Sistema Eléctrico de Potencia (SEP) está sujeto a perturbaciones y fallas que
provocan generalmente la salida inesperada de equipos, que alteran el punto de
operación del sistema, con la consiguiente degradación del servicio eléctrico. [1]
2
La operación y control de un SEP, está sujeta a diversas perturbaciones, las cuales
pueden conducir a un colapso al sistema. Las perturbaciones consideradas para la
presente investigación son las variaciones de carga abruptas que modifican el perfil de
tensiones a niveles inaceptables en algunas barras del SEP y asimismo la frecuencia.
Para responder a estas variaciones, deben actuar los reguladores de los generadores.
Las consecuencias de los colapsos, son generalmente catastróficas, las que se pueden
manifestar como pérdidas económicas, desgracias humanas, etc.
La creciente complejidad que alcanzaron los SEP, debido al aumento de
interconexiones, al uso de nuevas tecnologías y a la necesidad de operar el sistema en
forma económica, llevó a desarrollar softwares que ayudan a operar el sistema con un
grado elevado de seguridad y en condiciones cercanas a los límites de estabilidad. La
utilización de controles suplementarios en el excitatriz de los generadores es un medio
efectivo para extender los límites de estabilidad y mejorar la operación de SEP. [2, 3]
Para una determinada condición de operación del SEP, el sistema puede transitar a otra
condición con una dinámica no adecuada y tal vez pueda presentarse un colapso del
sistema si los reguladores no responden adecuadamente.
La resolución de este problema puede realizarse mediante tres enfoques:
i) Enfoque Tradicional: Control Clásico
En el enfoque tradicional, los métodos de resolución consideran el empleo de los
controladores tradicionales: proporcional, proporcional integrativo y proporcional
integrativo derivativo (P, PI, PID), pero, tal vez no respondan en situaciones
imprevistas. Sin embargo su diseño e implementación es relativamente fácil,
aunque la sintonización fina del controlador es dificultosa.
La utilización de controladores clásicos (P, PI, PID) calculados matemáticamente a
partir de un modelo aproximado del sistema eléctrico, puede presentar serias
deficiencias en su comportamiento cuando el sistema a controlar está sometido a

3
perturbaciones externas, o cuando el proceso de encontrar un modelo adecuado de
la dinámica del sistema es excesivamente complejo. Este tipo de situaciones se ha
venido afrontando en los últimos tiempos con técnicas avanzadas de control, entre
las cuales se pueden nombrar el control adaptable por modelo de referencia, la
programación de ganancias, los esquemas basados en el criterio de estabilidad de
Liapunov y los controladores de estructura variable.
Los controladores se implementaron mediante circuitos y señales analógicos.
Muchos generadores todavía están equipados con controladores de tipo analógico.
ii) Enfoque Moderno: Control Difuso
La operación de un sistema eléctrico, es tan cambiante que un enfoque
determinístico e inclusive uno estocástico puede resultar poco realista, es por esto
que se empiezan a utilizar otros enfoques, por ejemplo los procedimientos de
cálculos usando datos y lógica difusa. La formulación se caracteriza por la
incertidumbre a través de un número de escenarios, cada de uno de los cuales tiene
una cierta probabilidad de ocurrencia.
El controlador inteligente con lógica difusa, es más sencillo, por que está basado en
la observación del sistema en condiciones de operación. Esta observación de la
realidad, presenta reglas difusas, que pueden ser implementadas fácilmente en un
programa computacional.
Actualmente el uso de las computadoras permite desarrollar controladores basados
en sistemas de control digital, tales como, los controladores autosintonizados.
ii) Enfoque Actual: Control Inteligente
Por otro lado, los esquemas de control basados en técnicas de inteligencia artificial
como la utilización de mecanismos de inferencia basados en algoritmos genéticos,
redes neuronales o lógica difusa también han adquirido gran importancia en las
aplicaciones de control.

4
Siguiendo esta tendencia, en este trabajo se presentaran técnicas de control inteligente
aplicados al control de generadores eléctricos, basadas en sistemas de inferencia neuro-
difusos.
1.2 Objetivos
El objetivo de la investigación es la comprensión, descripción, descubrimiento y
generación de hipótesis sobre las metodologías aplicables a la protección de
transformadores de potencia.
Por lo tanto, los objetivos que se persiguen con la investigación, se dividen en objetivos
generales y objetivos específicos.
1.2.1 Objetivos Generales
Los objetivos generales de ésta investigación, son:
Impulsar el desarrollo de la investigación en la Carrera de Ingeniería Eléctrica e
Ingeniería Electrónica.
Apoyar al desarrollo de herramientas computacionales que permitan a las
empresas del sector eléctrico a resolver problemas de protección de
transformadores de potencia.
1.2.2 Objetivos Específicos
Los objetivos específicos de la presente investigación, son:
Analizar las aplicaciones de la lógica difusa al control inteligente de un
generador sincrónico.
Desarrollar una herramienta de simulación para el control inteligente de un
generador sincrónico.
Publicar los resultados de la investigación desarrollada.
5
1.3 Hipótesis
La hipótesis de la investigación, se resume a lo siguiente:
La aplicación de la lógica difusa al control inteligente de un generador sincrónico
permitirá una operación segura del sistema eléctrico de potencia, lo que repercutirá en la
reducción de la tarifa de la energía eléctrica para los consumidores finales bolivianos y
permitirá reducir o eliminar los colapsos de un sistema eléctrico.
1.4 Revisión Bibliográfica
La revisión de los trabajos relativos al tema de investigación, conduce al siguiente
resumen:
El artículo presentado por T. Hiyama [4], es uno de los primeros trabajos reportados en
la literatura que emplea reglas de control. Presenta una aplicación de un esquema de
control de estabilización basado en reglas para mejorar la estabilidad de un SEP. Varias
reglas simples son preparadas para cada generador del sistema. La señal de
estabilización para cada generador es de tipo discreto y se renueva en cada muestreo
para controlar los niveles de excitación que depende del estado de la
velocidad/aceleración al utilizar las mediciones realizadas de la salida, es decir, la
desviación de la velocidad y las reglas de control.
Carlos Buelna y Rogelio Soto [5, 6], presentan el diseño de un controlador neuro-difuso
para estabilizar la frecuencia y tensión de salida de un generador sincrónico. La
estructura de control propuesta consiste en dos controladores PI-difusos y dos redes
neuronales. Con esa estrategia de control, se reduce la dificultad de ajuste fino de los
factores de escala. El ajuste experimental se realiza en un laboratorio y una
computadora para el algoritmo de control. Se muestran los resultados de la simulación y
experimental, el sistema es robusto para grandes cambios de la carga.
F. Morales, et al. [7], realizan la comparación de tres métodos de diseño de
estabilizadores en sistemas de potencia. El primero se basa en reglas heurísticas, el

6
segundo en lógica difusa y el tercero utiliza las teorías de control H y control
proyectivo. Como objetivo de control se considera mejorar la estabilidad y la respuesta
dinámica de un generador conectado a una barra infinita. El desempeño de los
estabilizadores se evalúa mediante simulación no lineal del sistema eléctrico de potencia
con el software MATLAB. Este artículo, si bien no trata del control propiamente de un
generador, es interesante puesto que considerar en su modelación el sistema de
excitación de un generador, además emplea la lógica difusa y reglas heurísticas en la
estructura de un estabilizador de potencia.
F. Morales, et al. [8], proponen el diseño de un estabilizador de sistemas de potencia
basado en lógica difusa como en las teorías de control óptimo H y control proyectivo
subóptimo, el objetivo del control es aumentar la estabilidad y mejorar la respuesta
dinámica de un sistema multimáquinas que opera en diferentes condiciones. Se utiliza el
software de propósitos específicos MATLAB de Mathworks para las simulaciones.
M. Olivares y R. Rojas [9], recopilan antecedentes relativa a diferentes técnicas y
metodologías de modelado y control difuso de sistemas complejos: Describen en forma
resumida la aplicación actual de los sistemas difusos en control y hacen un análisis
bibliográfico relativo a los temas: Sistemas difusos, funciones base difusas, ajuste del
modelo difuso, estabilidad de sistemas difusos y control difuso basado en modelo. Este
artículo, realiza una discusión bibliográfica sobre el control difuso y sus aplicaciones.
K. Solano, et al. [10], presentan dos esquemas de control adaptable basados en
mecanismos de inferencia difusa. El primero modifica los parámetros de un controlador
PD convencional por medio de un sistema difuso Sugeno, obtenido a partir del
entrenamiento de una red neuronal. El segundo denominado SMRFAC (Switched
Model Reference Fuzzy Adaptive Controller), propone la utilización de diferentes
modelos de referencia de acuerdo a las condiciones de operación de la planta,
permitiendo optimar su comportamiento.
La utilización de controladores clásicos, puede presentar serias deficiencias en su
comportamiento cuando el sistema a controlar está sometido a perturbaciones externas o
cuando el proceso es muy complejo para modelar. Estos problemas se simplifican al
7
utilizar con técnicas avanzadas de control. La simulación se realiza mediante el software
MATLAB.
H. Hoang, K. Tomsovic, [11], se refieren al diseño de un estabilizador de un sistema de
potencia (PSS), que es capaz de proveer una señal apropiada de estabilización sobre un
amplio rango de las condiciones de operación y perturbaciones. En este artículo, se
propone, un método de diseño sistemático de control de lógica difusa. Aplicación para
una especificación de requerimiento de máquina específica de criterio de la actuación.
Este criterio de la actuación traduce en tres parámetros del controlador que pueden
calcularse fuera de línea o pueden computarse en tiempo real en respuesta a los cambios
del sistema. Se da énfasis a la robustez del controlador. Se discuten los métodos del
análisis transitorio y de pequeña señal. Este trabajo, está dirige a desarrollar el diseño de
un estabilizador robusto y métodos del análisis apropiados cuando se aplica la lógica
difusa. Se presenta la simulación numérica y la aplicación de la metodología propuesta a
dos casos.
M. Noroozian, et al. [12], presentan un controlador con lógica difusa que cambia la
reactancia serie para amortiguar las oscilaciones electromecánicas del sistema de
potencia. Se construye un juego de reglas del control y la inferencia es proporcionada
por una lógica difusa razonada. La base de conocimiento para el controlador, se
establece de la observación del comportamiento dinámico de un sistema de potencia
sencillo y el conocimiento de la ingeniería general sobre la dinámica del sistema. La
actuación del controlador, muestra ser robusta y comparable al controlador óptimo con
un tiempo mínimo.
A. Esogbue, et al. [13], describen un modelo de controlador de autoaprendizaje que
puede aprender eficientemente la ley del control para sistemas complejos a través de
reforzamiento de técnicas de aprendizaje y algoritmos de programación dinámica. El
controlador se aplica a una clase de problemas llamadas problemas generales del ajuste
de reguladores en los que el objetivo es manejar el sistema de ajuste mientras se
perfecciona alguna actuación de la función objetivo, haciendo ninguna suposición a
priori sobre la dinámica de la planta o su trayectoria óptima. Se discuten las tareas
pertinentes para un controlador de autoaprendizaje. El aprendizaje es cumplido vía
incremental, los algoritmos en línea de programación dinámica. Se usan, tanto la
8
diferencia temporal y Q-aprendizaje en el algoritmo de aprendizaje. Se informan
resultados experimentales con ambos en el problema del equilibrio del péndulo
invertido, problema de la estabilización del sistema potencia y el problema recuperación
del sistema de satélite atorado.
A. Esogbue, W. Hearnes II [14], presentan un método de la programación dinámica
aproximada para el reforzamiento del aprendizaje para problemas de acción continua de
ajuste del regulador, las cuales aprenden políticas de control cercanas al óptimo basado
en medidas escalares de la actuación. El algoritmo de Espacio de Acción Continua
(CAS) usa los métodos de búsqueda de línea derivativa libre para obtener la acción
óptima en el espacio continuo. Se presentan las propiedades de la convergencia teórica
del algoritmo. Se investiga varios criterios heurísticos para la detención y se ilustra la
aplicación práctica en dos problemas ejemplos (problema del equilibrio del péndulo
invertido y el problema de la estabilización del sistema de potencia).
C. Falkner, B. Heck [15], desarrollan un método para diseñar controladores
realimentados basados en pasividad para sistemas no lineales complejos que no son
inherentemente pasivos. Usando esta metodología, se diseñan tres estabilizadores de
sistema de potencia; dos de éstos son controladores realimentados del modo errante y el
tercero usa en el diseño principios básicos de pasividad. Los controladores se examinan
para ver cómo ellos manejan un modelo de incertidumbre, perturbaciones y ruido de la
medida. Los resultados se comparan con un estudio anterior realizado sobre el mismo
modelo de referencia del sistema potencia que usa seis controladores normales.
M. A. M. Hassan, et al. [16], presentan la aplicación un controlador de lógica difusa
para mejorar la estabilidad del SEP. La señal estabilizante es computada usando una
función de membresía difusa que depende del estado de la velocidad y aceleración del
generador en el plano de fase. La efectividad del estabilizador propuesto, se demuestra
mediante simulación para diferentes condiciones de operación y disturbios.
M. A. M. Hassan, et al. [17], presentan la implementación de un controlador
autosintonizado basado en lógica difusa para mejorar la estabilidad del SEP. La señal de
estabilización es computada usando una función de membresía estándar dependiente del
estado de la velocidad/aceleración del generador en el plano de fase. El rendimiento del
9
estabilizador propuesto es demostrado implementando en forma práctica usando un
procesador digital de señal montado en un PC-AT. Se presentan los resultados de las
pruebas experimentales sobre un modelo físico de un SEP.
M. Tomsovic y M. Y. Chow, [18], editan un tutorial sobre la aplicación de la lógica
difusa en SEP, es un material autocontenido y no requiere experiencia en métodos de
lógica difusa e incluye contribuciones sobre el estado del arte de la investigación.
M. A. Abido y Y. L. Abdel-Magid, [19], presentan un estabilizador de sistemas de
potencia (PSS) neuro-difuso híbrido para mejorar la estabilidad dinámica. La red
neuronal basada en lógica difusa es entrenada sobre un amplio rango de condiciones de
operación para resintonizar los parámetros del PSS en tiempo real basado sobre las
condiciones de carga del generador.
M. A. Abido y Y. L. Abdel-Magid, [20], presentan un estabilizador de sistemas de
potencia basado en reglas y genética. La propuesta usa algoritmos genéticos para buscar
el ajuste óptimo de los parámetros del PSS basado en reglas.
Los enfoques considerados por los diversos autores para el control inteligente del
generador eléctrico y SEP, se pueden clasificar en:
i) Aplicación de lógica difusa
ii) Aplicación de redes neuronales
iii) Aplicación de sistemas de inferencia neuro-difuso.
iv) Aplicación de algoritmos genéticos
Del análisis de los trabajos desarrollados sobre el tema, este trabajo se enmarca en el
control inteligente mediante un sistema de inferencia difuso.
10
1.5 Descripción del Trabajo
En este primer capítulo, se plantea la problemática enfocada en la investigación. Se
presentan los objetivos y se realiza una revisión y discusión bibliográfica, donde se
analizan soluciones al problema, planteados por otros investigadores –el estado del arte
de la aplicación de la lógica difusa y redes neuronales en el control de generadores
eléctricos de un SEP-.
En el capítulo II, se realiza la modelación matemática del generador y SEP,
representadose mediante diagramas de bloques y se plantea el esquema de control
propuesto.
En el capítulo III, se plantea la modelación difusa, considerando: la Fusificación, Base
de Reglas, Motor de Inferencia y la Desfusificación.
En el capítulo IV, se describe el desarrollo del controlador mediante el software de
propósito específico MATLAB y se realiza la aplicación a un caso real.
En el capítulo V, se presentan las conclusiones de la presente investigación y los
desarrollos futuros posibles relacionados con la temática del control inteligente de un
generador eléctrico.
Se incluye las referencias bibliográficas y se presentan los anexos necesarios para una
mejor comprensión del trabajo de investigación.
11
II MODELACIÓN MATEMÁTICA
2.1 Introducción
En los últimos tiempos, muchos trabajos proponen técnicas de inteligencia artificial
tales como lógica difusa, redes neuronales [5, 6] y algoritmos genéticos [20] para
aplicaciones en sistemas eléctricos de potencia. Actualmente la tendencia es el control
neuro-difuso.
En este capítulo, se desarrolla el modelo mecánico y eléctrico del generador sincrónico
de polos salientes y el esquema de control propuesto.
2.2 Modelo Matemático del Generador
2.2.1 Modelo Mecánico
El generador eléctrico es impulsado por una turbina, para representar la dinámica de la
turbina-generador, está regido por la siguiente ecuación básica:
ema TTTθJ [N-m], conocida también como ecuación de oscilación
donde:
J = Momento de inercia de masa rotante
= Ángulo mecánico del eje en radianes con respecto a una referencia fija
Ta = Torque de aceleración actuando en el eje
Tm = Torque mecánico motor
Te = Torque eléctrico de la carga
De las diversas formas de la ecuación de oscilación, la más empleada es: [3]
DωTTωτ emj [p.u.]
1ωδ [p.u.]

12
donde:
δ = Ángulo eléctrico
jτ = Constante de tiempo representativo de la Inercia J
ω = Velocidad angular
D = Coeficiente de amortiguación de potencia
2.2.2 Modelo Eléctrico
El generador sincrónico, se puede representar por ecuaciones diferenciales no lineales
de 5 orden, el modelo se denomina: modelo E” [3, 5, 6]. Este modelo se utilizará para
los estudios de simulación y entrenamiento de la red neuronal.
Las ecuaciones que representan el modelo eléctrico del generador, son:
q''qq
''d
''d
''qo I)X(XEEτ
d1d
'qDD
''do I)X(XEΛΛτ
Dddxd'qdfd
'q
'q
'do ΛKIXEKEEEτ
DqE 2'
1''q KKE
donde:
''qE = Tensión subtransitoria en el eje directo.
DΛ = Enlaces de flujo en el circuito de amortiguamiento. 'qE = Tensión transitoria en el eje en cuadratura.
= Velocidad angular del rotor.
δ = Ángulo del rotor.
XXXX
K 'd
''d
1
12 K1K

13
Representando el sistema en la forma ),,( tuxfx donde las variables de estado se
elige como:
T'qD
''d
T54321 δ,,E,Λ,Ex,x,x,x,xx , las ecuaciones de estado, son:
''qo
q''qq1
1 τI)X(Xx
x
''do
d'd23
2 τI)X(Xxx
x
'do
d3dxd2dfd3 τ
)K(1xIXxKEx
j
41dq''qm
4 τDxxIIET
x
145 xx
Las corrientes y tensiones en los ejes directo y en cuadratura (eje d y eje q), son:
''d
''qaL
''d
''daL
''q
q XX)r(REX)r(RE
I
''d
''qaL
''''aL
''
XX)r(REX)r(RE
I
qqd
d
Lq4dLd RIxIRV
L4L RIxIRV dqq
2q
2dt VVV
y además:
2231''q xKxKE
14
XXXX
K 'd
''d
1
12 K1K
2'd
''d
'd
'dd
d )X(X)X)(XX(X
K
XX)X)(XX(X
'd
''d
'dd
d
xX
2.3 Diagrama de Bloques
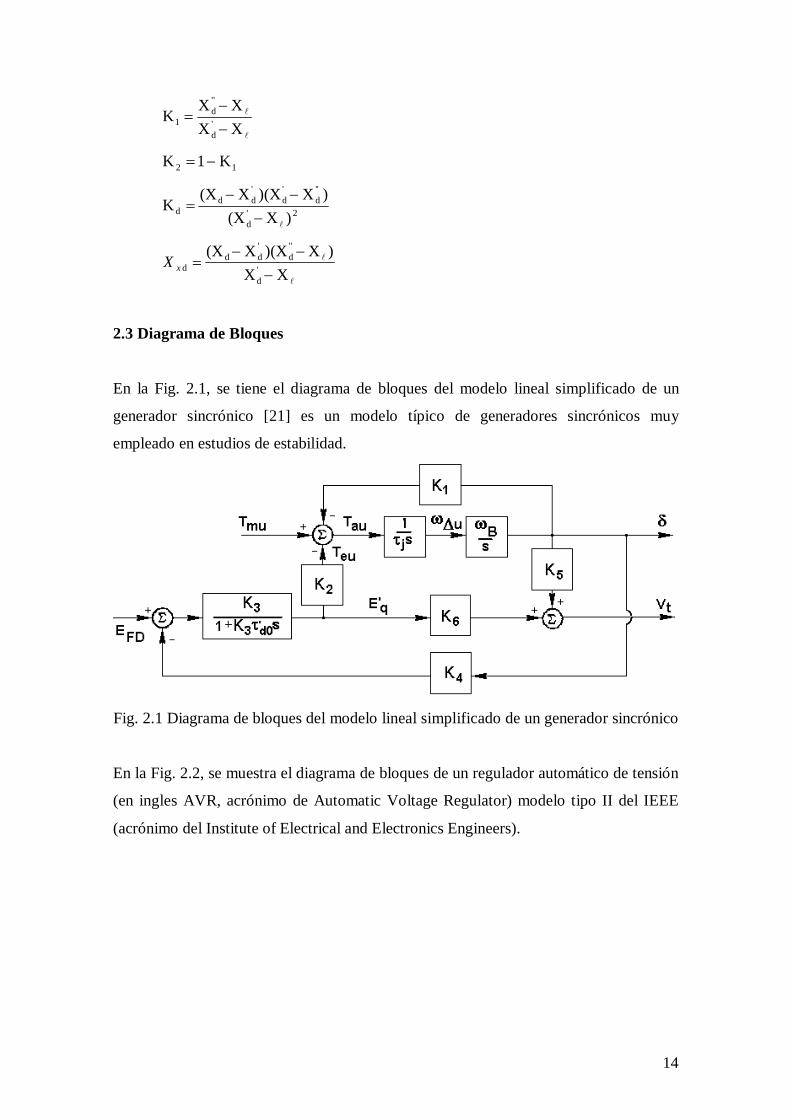
En la Fig. 2.1, se tiene el diagrama de bloques del modelo lineal simplificado de un
generador sincrónico [21] es un modelo típico de generadores sincrónicos muy
empleado en estudios de estabilidad.
Fig. 2.1 Diagrama de bloques del modelo lineal simplificado de un generador sincrónico
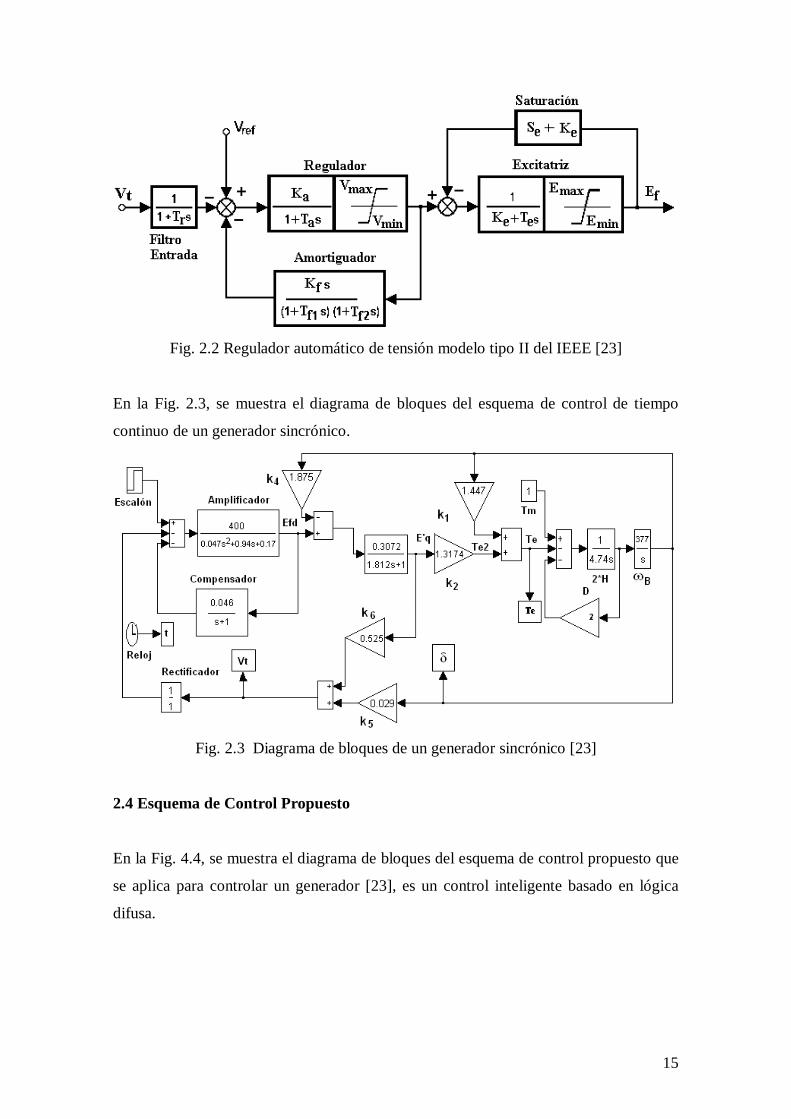
En la Fig. 2.2, se muestra el diagrama de bloques de un regulador automático de tensión
(en ingles AVR, acrónimo de Automatic Voltage Regulator) modelo tipo II del IEEE
(acrónimo del Institute of Electrical and Electronics Engineers).
15
Fig. 2.2 Regulador automático de tensión modelo tipo II del IEEE [23]
En la Fig. 2.3, se muestra el diagrama de bloques del esquema de control de tiempo
continuo de un generador sincrónico.
Fig. 2.3 Diagrama de bloques de un generador sincrónico [23]
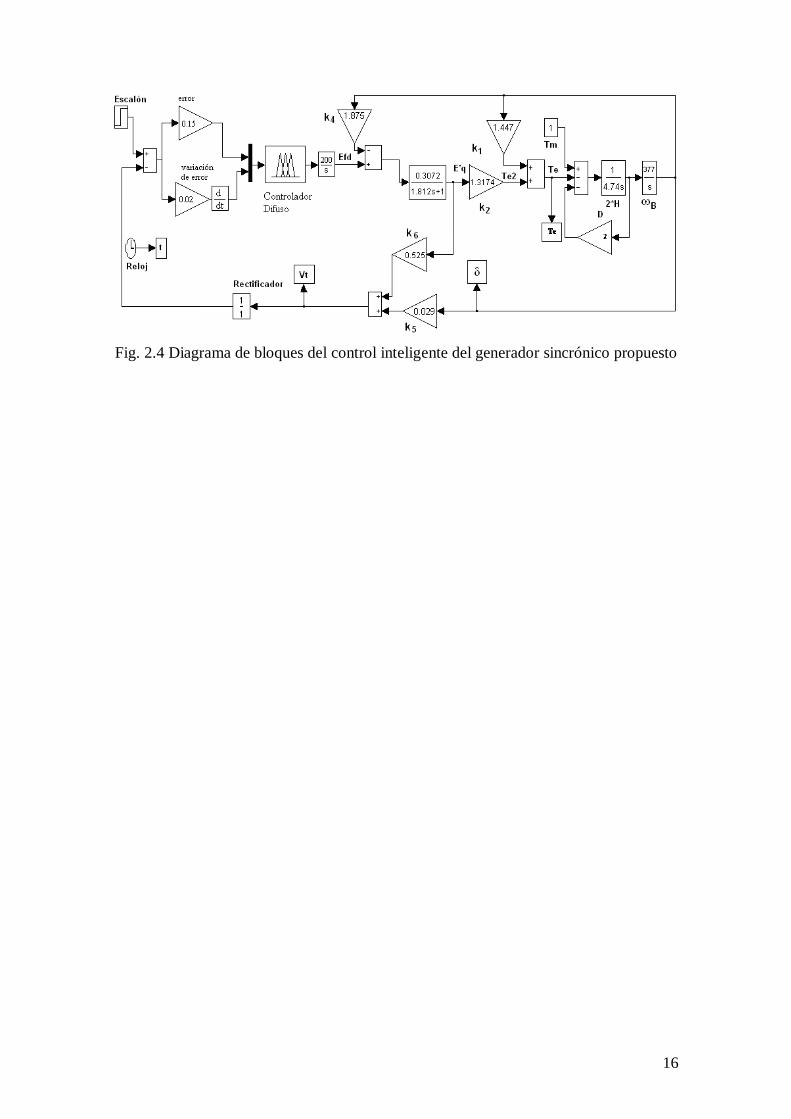
2.4 Esquema de Control Propuesto
En la Fig. 4.4, se muestra el diagrama de bloques del esquema de control propuesto que
se aplica para controlar un generador [23], es un control inteligente basado en lógica
difusa.
16
Fig. 2.4 Diagrama de bloques del control inteligente del generador sincrónico propuesto

17
III MODELACIÓN DIFUSA
3.1 Introducción
En este capítulo, se enfoca la lógica clásica (lógica bivalente) y la lógica difusa (lógica
multivaluada). También se enfoca la modelación difusa, considerando: la Fusificación,
Base de Reglas, Motor de Inferencia y la Desfusificación.
3.2 Lógica de Aristóteles
Aristóteles, filósofo griego (384 - 322 a.C.), fue el fundador de la ciencia de la lógica, y
estableció un conjunto de reglas rígidas para que las conclusiones puedan ser aceptadas
como lógicamente válidas.
La lógica clásica está basada en la lógica de Aristóteles, es una lógica bivalente: ser ó
no ser, 0 ó 1, todo ó nada, falso o verdadero, blanco ó negro, pertenece ó no pertenece,
caliente ó frío, etc., no se acepta situaciones intermedias.
Esta lógica bivalente presenta dificultades en su aplicación a los problemas de la vida
real.
La lógica convencional trabaja con información bien definida y precisa. Define la
realidad en grados de verdad absolutos (0’s ó 1’s). Es rígida.
La lógica clásica es un caso particular de la lógica difusa.
3.2.1 Conjuntos Clásicos [22]
Los conjuntos clásicos o convencionales están definidos por la enumeración de sus
elementos o por una condición que defina si el elemento pertenece o no al conjunto.
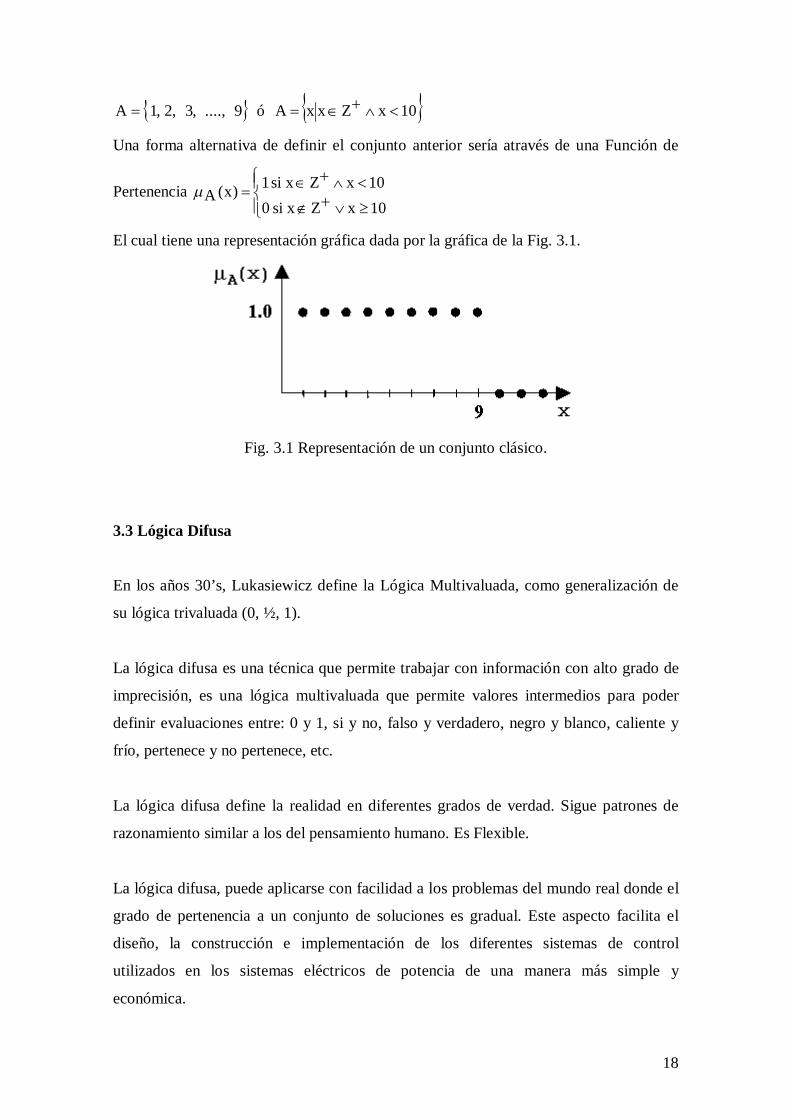
Ejemplo 3.1, Sea A un conjunto definido en el universo de los números enteros
positivos , ZA . El conjunto A se puede definir como:
18
9....,,3,2,1A ó 10xZxxA
Una forma alternativa de definir el conjunto anterior sería através de una Función de
Pertenencia
10xZxsi010xZxsi1)x(A
El cual tiene una representación gráfica dada por la gráfica de la Fig. 3.1.
Fig. 3.1 Representación de un conjunto clásico.
3.3 Lógica Difusa
En los años 30’s, Lukasiewicz define la Lógica Multivaluada, como generalización de
su lógica trivaluada (0, ½, 1).
La lógica difusa es una técnica que permite trabajar con información con alto grado de
imprecisión, es una lógica multivaluada que permite valores intermedios para poder
definir evaluaciones entre: 0 y 1, si y no, falso y verdadero, negro y blanco, caliente y
frío, pertenece y no pertenece, etc.
La lógica difusa define la realidad en diferentes grados de verdad. Sigue patrones de
razonamiento similar a los del pensamiento humano. Es Flexible.
La lógica difusa, puede aplicarse con facilidad a los problemas del mundo real donde el
grado de pertenencia a un conjunto de soluciones es gradual. Este aspecto facilita el
diseño, la construcción e implementación de los diferentes sistemas de control
utilizados en los sistemas eléctricos de potencia de una manera más simple y
económica.

19
3.3.1 Conjuntos Difusos
El concepto formal de conjunto difuso, fundamento de la lógica difusa, fue introducido
por Lofti A. Zadeh en 1965.
Los conjuntos difusos, pueden ser vistos como una generalización de la noción de
conjunto clásico, en la cual la función de pertenencia puede asumir valores en el
intervalo 1,0 . En este caso, no se puede decir simplemente que un elemento pertenece
al conjunto, y si, que el elemento pertenece al conjunto con un cierto grado de
pertenencia.
Ejemplo 3.2, Sea el conjunto de los números enteros próximos al número 7. Este
conjunto puede ser definido por una función de pertinencia dado en la Tabla No. 3.1.
Tabla 3.1 Función de pertenencia discreta
En la gráfica de la Fig. 3.2 se muestra la función de pertenencia discreta.
Fig. 3.2 Gráfica de la función de pertenencia discreta.
Ejemplo 3.3, conjunto de tensiones próximas a la tensión nominal (1 pu), el conjunto se
representa por la siguiente función de pertenencia:
cvsi0
cvbsibcvc
bvasiabav
avsi0
)v(V

20
Si a = 0.95, b = 1 y c = 1.05, se tiene la siguiente representación gráfica:
Fig. 3.3 Gráfica de la función de pertenencia.
De una manera general, un conjunto difuso, F, definido en el universo del discurso U,
está representado por:
Ux)x(F,xF
Es decir, que los elementos del conjunto difuso, son definidos por parea constituidos por
los elementos Ux y los respectivos valores de la función de pertinencia )x(F .
3.3.2 Variables Lingüísticas
Las variables lingüísticas, son variables cuyos valores no son números, y sí, palabras o
sentencias de un lenguaje natural o artificial.
Ejemplo 3.4, Sea la variable Tensión, suponiendo que esa variable puede asumir los
valores lingüísticos Muy_Baja, Baja, Normal, Alta y Muy_Alta. El conjunto de valores
asumidos por la variable lingüística es denominado Conjunto de Términos representado
por )x(T , donde x es la variable. Los valores asumidos por la variable lingüística son
representados por conjuntos difusos definidos por las correspondientes funciones de
pertinencia
Variable lingüística: Tensión (V)
Conjunto de términos: T(V)={Muy_Baja, Baja, Normal, Alta, Muy_Alta}
Las funciones de pertenencia se muestran en las gráficas de la Fig. 3.4

21
Fig. 3.4 Gráfica de la función de pertenencia
3.3.3 Funciones de Pertenencia
La definición de las funciones de pertenencia empleadas en una aplicación de sistemas
difusos es una etapa fundamental y difícil en el desarrollo de esa aplicación. No existen
reglas definitivas para la elección de dichas funciones las cuales representan el
conocimiento de un especialista en el tema en cuestión o informaciones extraídas de un
banco de datos.
Algunas características de las funciones de pertenencia, son:
1. Formato: Triangular, trapezoidal, Gaussiana, sigmoidal, etc.
2. Obtención: Elegida por los usuarios basados en su experiencia o através de un
proceso de optimización a partir de datos experimentales u obtenidos por
simulación.
3. Solapamiento: No es necesario pero es importante para dar robustez al sistema
difuso. En general el solapamiento es de dos funciones.
4. Normalización: Generalmente las funciones de pertinencia son definidas en el
intervalo [0, 1]. No es obligatorio mas facilita la implementación de sistemas
difusos.
3.3.4 Operaciones Básicas de Lógica Difusa
Dados dos conjuntos difusos A y B en el mismo universo X, con funciones de
pertenencia A y B respectivamente, se pueden definir las siguientes operaciones
básicas:

22
Unión. La función de pertenencia de la unión de A y B se define como:
)x(B),x(AmaxBA
Intersección. La función de pertenencia de la intersección de A y B es:
)x(B),x(AminBA
Complemento. La función de pertenencia del complemento de A se define como:
)x(A1)x(A
Producto cartesiano. Dados los conjuntos difusos A1, ... , An con universos X1, ..., Xn
respectivamente, se define el producto cartesiano como un conjunto difuso en
X1 ...Xn con la siguiente función de pertenencia:
)nX(nA,...),1X(1Amin)nX,...,1X(nA...1A
según Mamdani (1974)
)nX(nA...)2X(2A)1X(1A)nX,...,1X(nA...1A
según Larsen (1980).
3.4 Modelos Basados en Lógica Difusa
Los modelos basados en lógica difusa, son:
1. Modelos difusos lingüísticos
2. Modelos difusos de Takagi y Sugeno
23
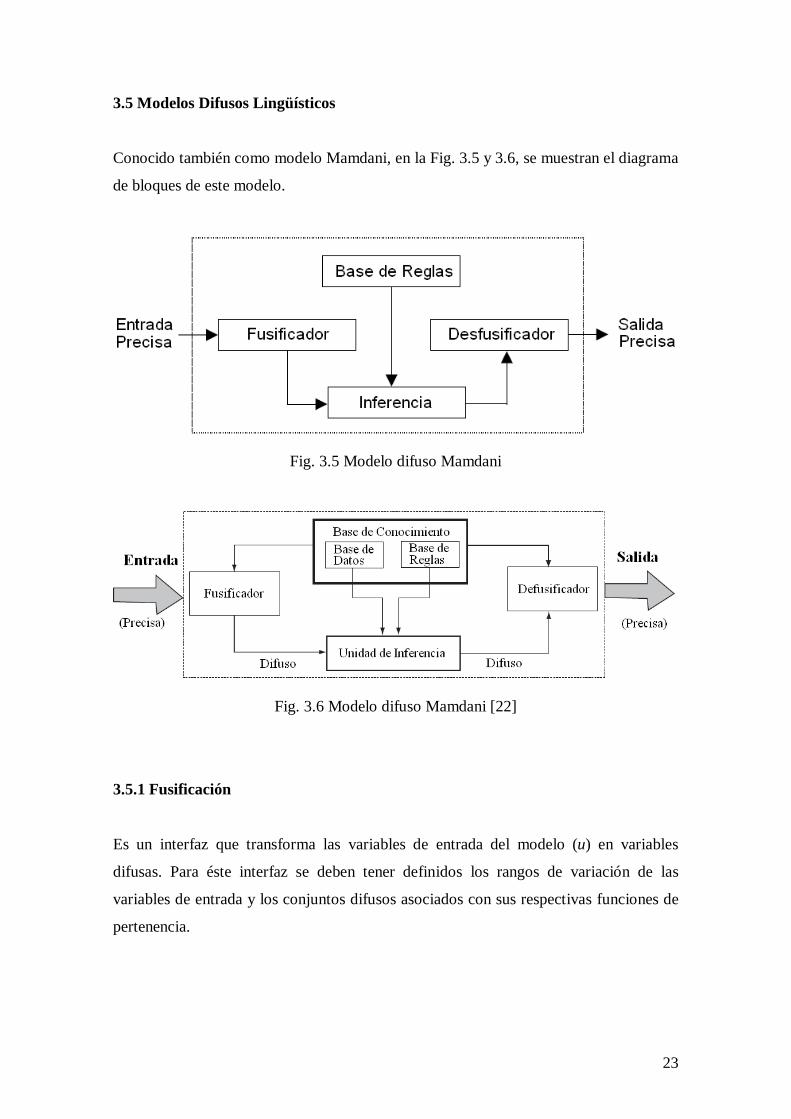
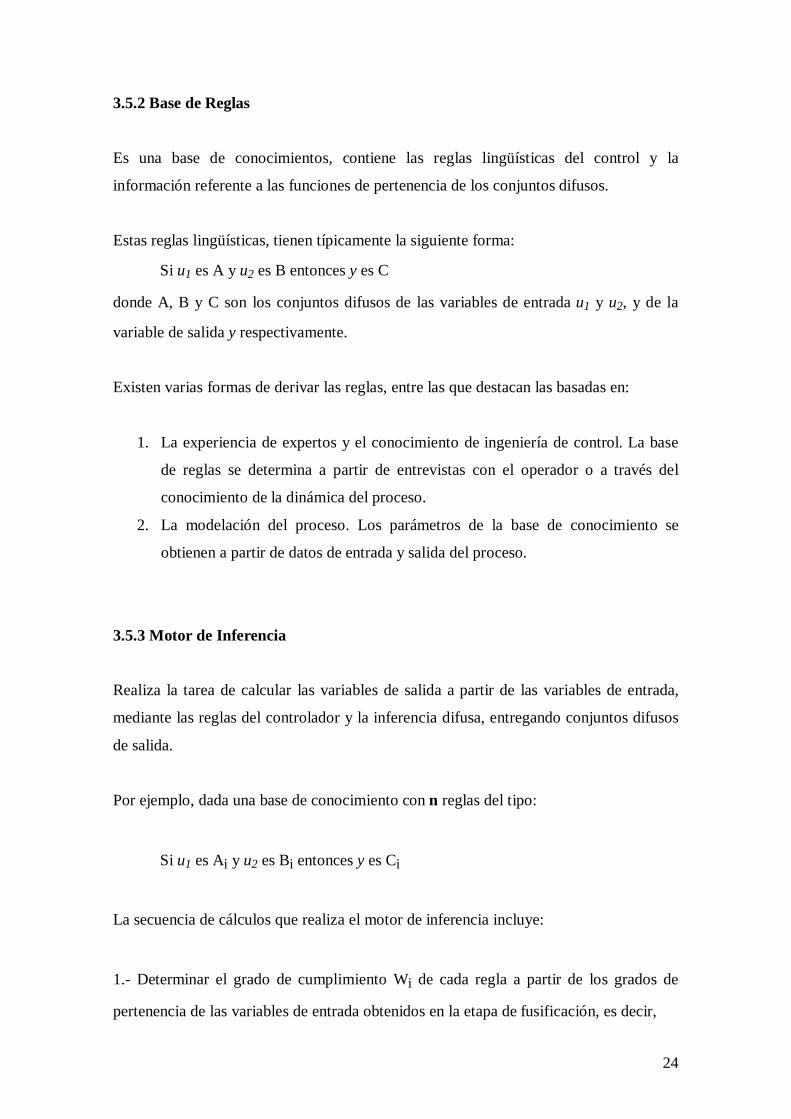
3.5 Modelos Difusos Lingüísticos
Conocido también como modelo Mamdani, en la Fig. 3.5 y 3.6, se muestran el diagrama
de bloques de este modelo.
Fig. 3.5 Modelo difuso Mamdani
Fig. 3.6 Modelo difuso Mamdani [22]
3.5.1 Fusificación
Es un interfaz que transforma las variables de entrada del modelo (u) en variables
difusas. Para éste interfaz se deben tener definidos los rangos de variación de las
variables de entrada y los conjuntos difusos asociados con sus respectivas funciones de
pertenencia.
24
3.5.2 Base de Reglas
Es una base de conocimientos, contiene las reglas lingüísticas del control y la
información referente a las funciones de pertenencia de los conjuntos difusos.
Estas reglas lingüísticas, tienen típicamente la siguiente forma:
Si u1 es A y u2 es B entonces y es C
donde A, B y C son los conjuntos difusos de las variables de entrada u1 y u2, y de la
variable de salida y respectivamente.
Existen varias formas de derivar las reglas, entre las que destacan las basadas en:
1. La experiencia de expertos y el conocimiento de ingeniería de control. La base
de reglas se determina a partir de entrevistas con el operador o a través del
conocimiento de la dinámica del proceso.
2. La modelación del proceso. Los parámetros de la base de conocimiento se
obtienen a partir de datos de entrada y salida del proceso.
3.5.3 Motor de Inferencia
Realiza la tarea de calcular las variables de salida a partir de las variables de entrada,
mediante las reglas del controlador y la inferencia difusa, entregando conjuntos difusos
de salida.
Por ejemplo, dada una base de conocimiento con n reglas del tipo:
Si u1 es Ai y u2 es Bi entonces y es Ci
La secuencia de cálculos que realiza el motor de inferencia incluye:
1.- Determinar el grado de cumplimiento Wi de cada regla a partir de los grados de
pertenencia de las variables de entrada obtenidos en la etapa de fusificación, es decir,

25
),iB,iAmin(iW
debido a que las premisas de la reglas están unidos por operadores AND, definidos
como la intersección de conjuntos difusos.
2.- Para cada regla se tiene una consecuencia "y es Ci", que tiene asociado una función
de pertenencia iC . Por lo tanto, se tiene un conjunto de salida 'iC , cuya función de
pertenencia es:
),iC,iWmin('iC
donde Wi es el grado de cumplimiento para la regla i.
3.- Para evaluar el conjunto total de reglas, se unen los conjuntos difusos 'iC resultantes
de cada regla, generándose un conjunto de salida con la siguiente función de
pertenencia:
n,...,1i;)'iC
max('C
De esta forma, se obtiene una salida difusa del controlador, con una función de
pertenencia 'C
3.5.3.1 Consistencia y Completividad de la Reglas
a) Consistencia de un conjunto de reglas
Un conjunto de reglas SI – ENTONCES, es inconsistente si hay más de dos reglas con el
mismo antecedente pero con diferente consecuente.
26
b) Completividad de un conjunto de reglas
Un conjunto de reglas está completo si cualquier combinación de valores de entradas resulta
en un valor apropiado de la salida.
3.5.4 Desfusificación
Es un interfaz de desfusificación que provee salidas discretas y determinísticas a partir
de los conjuntos difusos C' obtenidos como resultado de la inferencia.
Existen diferentes métodos de desfusificación, algunos de los cuales se describen a
continuación:
1. Método del máximo. La salida corresponde al valor para el cual la función de
pertenencia 'C alcanza su máximo.
2. Media del máximo. La salida es el promedio entre los elementos del conjunto
C' que tienen un grado de pertenencia máximo.
3. Centro de área. Genera como salida el valor correspondiente al centro de
gravedad de la función de pertenencia del conjunto de salida C'.
3.6 Modelos Difusos de Takagi y Sugeno
Estos modelos se caracterizan por relaciones basadas en reglas difusas, donde las
premisas de cada regla representan subespacios difusos y las consecuencias son una
relación lineal de entrada-salida (Takagi y Sugeno, 1995).
Las variables de entrada en las premisas de cada regla son relacionadas por operadores
"y" y la variable de salida es una combinación lineal de las variables de estado. Por lo
tanto, las reglas del modelo tienen la siguiente forma:
Ri : Si X1 es A1i y ... y Xk es Aki

27
Entonces kXikp...1Xi
1piopiY
donde X1, ..., Xk son las variables de entrada o premisas de las reglas, A1i, ..., Aki son
los conjuntos difusos asociados a las variables de entrada,
ikp,...,i
op son los parámetros de la regla i, e Yi es la salida de la regla i.
Por lo tanto, la salida del modelo, Y, se obtiene ponderando la salida de cada regla por
su respectivo grado de cumplimiento Wi, es decir:
M
1iiW
M
1iiYiW
Y
donde M es el número de reglas del modelo y Wi se calcula según el operador
intersección.
3.6.1 Ventajas de los Modelos Difusos
Las ventajas de los dos modelos difusos, se pueden resumir en lo siguiente:
Ventajas del Modelo Takagi y Sugeno:
1. Es computacionalmente eficiente
2. Trabaja adecuadamente con técnicas lineales
3. Trabaja adecuadamente con técnicas de optimización y adaptivas
4. Es adecuado con el análisis matemático
Ventajas del Modelo Mamdani:
1. Es intuitivo
2. Tiene amplia aceptación

28
3. Es adecuada al pensamiento humano
3.7 Sistema de Lógica Difusa
La lógica difusa proporciona un mecanismo para representar los constructos lingüísticos
tales como: “Mucho”, “Medio” y “Poco”. En general, la lógica difusa proporciona una
estructura de inferencia que permite capacidades apropiadas de razonamiento humano.
Al contrario, la teoría de los conjuntos binarios tradicional describe eventos precisos,
los eventos ocurren o no ocurren. La utilidad de los conjuntos difuso estriba en su
habilidad para modelar datos inciertos o ambiguos, en la Fig. 3.6 Se muestra un
esquema de un sistema de lógica difusa.
Fig. 3.6 Sistema de Lógica Difusa. [23]
El mecanismo de inferencia difusa está gobernado por reglas difusas: SI - ENTONCES,
permite obtener una salida (decisión) apropiada en función de las entradas.
3.8 Sistema de Control
Un sistema de control es un conjunto de componentes físicos diseñado para alterar o
regular el sistema basado en una acción de control.
El problema de control, está determinado como:
1. La salida o respuesta del sistema físico bajo control está ajustada según lo
requerido por la señal de error.
29
2. La señal de error es la diferencia entre la respuesta actual (sensor) de la planta y
la respuesta deseada, como la especifica por una entrada de referencia.
3.8.1 Sistema de Control de Lazo Cerrado
Un sistema de control de lazo cerrado, es un sistema realimentado, en este sistema de
control, la acción de control depende de salida de sistema.
3.9 Diseño de Controladores para Sistema de Control
Los pasos para diseñar un controlador para un sistema complejo, son los siguientes: [23]
1. Los sistemas en gran escala son descompuestos en un conjunto de subsistemas
desacoplados.
2. Las variaciones temporales de los sistemas son hechas para variación lenta.
3. La dinámica no lineal de la planta es linealizada localmente sobre un conjunto
de puntos de funcionamiento.
4. Un conjunto de variables de estado, variables de control, o características de
salida están disponibles.
5. Los controladores simples P, PD y PID son diseñados para cada subsistema
desacoplado.
6. Puede existir incertidumbres debido al entorno externo, el diseño de controlador
deben ser tal que reúna todas las necesidades.
7. Un sistema de control supervisor, el operador automático o experto humano,
forme un lazo de control realimentado y ayude en ajustar los parámetros de los
controladores.
3.10 Controlador Difuso
El control difuso es una tecnología actualmente muy bien desarrollada que permite
utilizar conocimiento de naturaleza heurística para controlar un sistema. Tiene la
propiedad de poder manejar imprecisión y vaguedad en la información que utiliza.
Tienen una gran popularidad ya que, aún sin aprobar del todo la rigurosa métrica que la

30
teoría de control impone, han captado el interés de fabricantes de equipos electrónicos y
de control al ser aplicados con éxito a un sinfín de aparatos y dispositivos.
El control difuso es una estrategia que pertenece al Control Inteligente cuyas decisiones
las toman utilizando un sistema de inferencia basado en lógica difusa. Un controlador
difuso es por naturaleza no lineal y existen diversos tipos, en general se define un
conjunto de estructuras básicas cuyo comportamiento se aproxima a los controladores
clásicos del tipo Proporcional (P), Integral (I) o Derivativo (D). Donde estas
denominaciones dependen del procesamiento que se realice sobre la señal de error antes
de entrar al sistema de inferencia difuso.
3.10.1 Controlador PID
El controlador PID basado en lógica difusa, es uno de los controladores ampliamente
empleado en el control de sistemas.
En la Fig. 3.6, se muestra el esquema de un controlador difuso PID, es decir, un
controlador difuso Proporcional, Derivativo e Integral. Éste controlador requiere tres
señales: Una señal proporcional al error, otra señal proporcional a la derivada de la
señal de error y otra tercera proporcional a la integral de la señal error.
La configuración del controlador que se muestra es de carácter académico, puede variar
en la implementación del mismo.
Fig. 3.6 Controlador difuso PID.
31
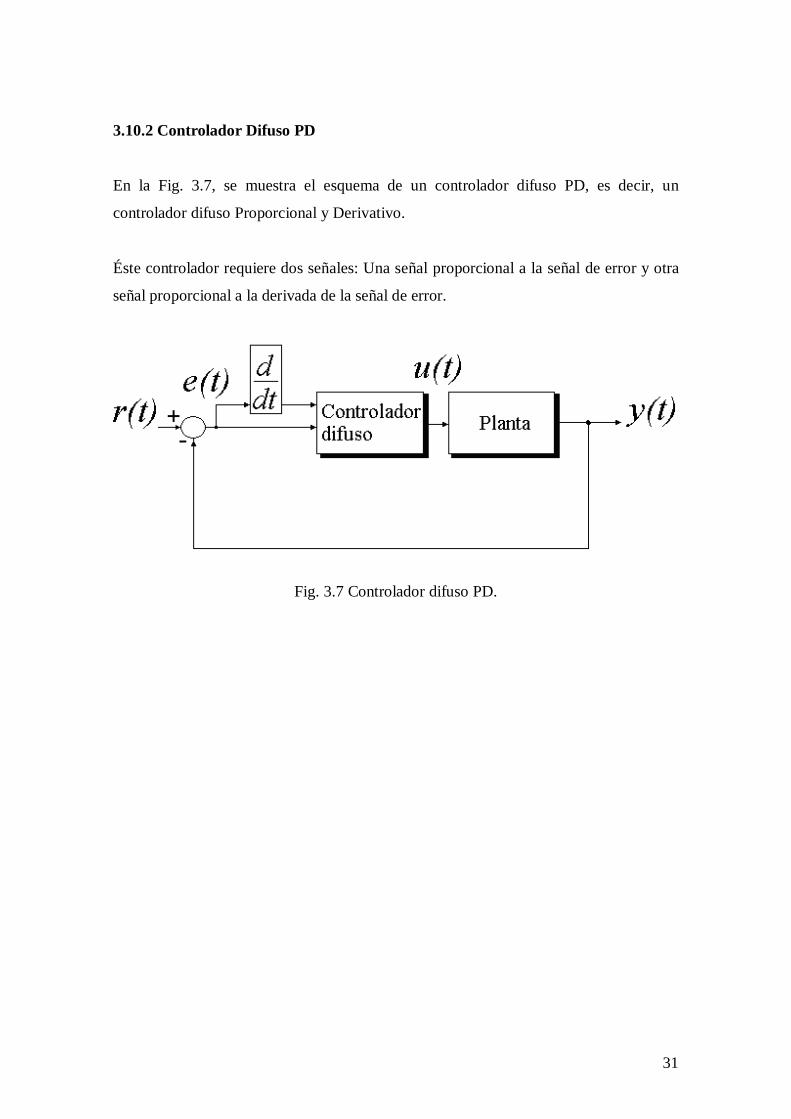
3.10.2 Controlador Difuso PD
En la Fig. 3.7, se muestra el esquema de un controlador difuso PD, es decir, un
controlador difuso Proporcional y Derivativo.
Éste controlador requiere dos señales: Una señal proporcional a la señal de error y otra
señal proporcional a la derivada de la señal de error.
Fig. 3.7 Controlador difuso PD.
32
IV APLICACIÓN
4.1 Introducción
En este capítulo, se realiza la aplicación del controlador difuso propuesto para el control
del generador sincrónico y la respectiva simulación empleando el software MATLAB®
2007 y sus utilitarios: Simulink® [26], el Tool box de lógica difusa. [24, 25]
4.2 MATLAB®
El nombre de MATLAB proviene de la contracción de los términos MATrix
LABoratory y fue concebido para el fácil acceso a las librerías que son de gran
importancia en el campo de la computación y el cálculo matricial.
El software MATLAB®, es un entorno de computación y desarrollo de aplicaciones
totalmente integrado orientado para el desarrollo de proyectos con elevados cálculos
matemáticos y la visualización gráfica de estos. MATLAB integra el análisis numérico,
cálculo matricial, procesado de señales, todo en un entorno amigable para el usuario.
4.3 SIMULINK®
El software Simulink® es una herramienta basada en el uso de diagramas de bloques
para modelar y analizar sistemas dinámicos. Está estrechamente ligada con el programa
MATLAB®. En la Fig. 4.1, se muestra la integración del software SIMULINK® con el
software MATLAB®, los Tool Boxes, ficheros creados por el usuario, Real Time
Windows Target es el Kernel en tiempo real que hace de interfaz con el sistema
operativo Windows permite capturar y generar señales en tiempo real mediante
diagramas de bloques generados con SIMULINK® [27].

33
Fig. 4.1 Interrelación del SIMULINK® con el MATLAB®
El software SIMULINK® es un software para modelar, simular y analizar sistemas en
tiempo continuo, tiempo discreto o híbridos. Proporciona una interfaz gráfica (GUI)
para la construcción de modelos: diagrama de bloques. Los resultados pueden ser
llevados al espacio de trabajo para posterior simulación y visualización.
Para la presente investigación, se utilizó el software MATLAB® 2007, SIMULINK® y
el Tool Box de lógica difusa.
4.4 Datos del Sistema
Para la aplicación de la presente investigación, se empleo un generador sincrónico típico
de 3 kVA, 220 V, 60 Hz, 7.9 A, 1200 rpm, muy utilizado en la literatura técnica, cuyos
datos, se muestran en la Tabla 4.1.
Tabla 4.1 Parámetros del generador sincrónico [5]
Parámetros Valor Descripción
dX 0.615 pu Reactancia de eje directo
'dX 0.176 pu Reactancia transitoria de eje directo
''dX 0.146 pu Reactancia subtransitoria de eje directo
Xq 0.366 pu Reactancia de eje en cuadratura
34
'qX 0.366 pu Reactancia transitoria de eje en cuadratura
''qX 0.217 pu Reactancia subtransitoria de eje en cuadratura
j 2.7952 s Inercia efectiva (2*H)
'do 0.169 s Constante de tiempo transitoria de eje directo
''do 0.006268s Constante de tiempo subtransitoria de eje directo
''qo ''
do2 s Constante de tiempo subtransitoria de eje de cuadratura
D 0.0053 s Factor de amortiguamiento equivalente
ar 0.02427 pu Resistencia de armadura
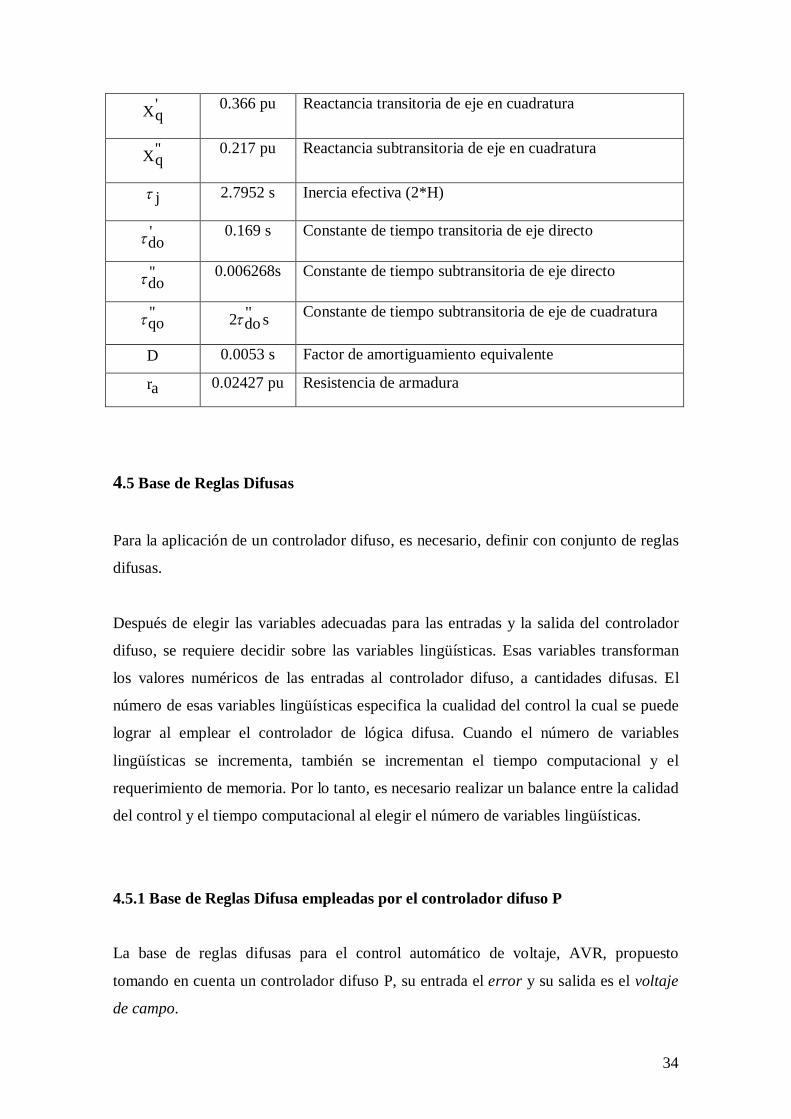
4.5 Base de Reglas Difusas
Para la aplicación de un controlador difuso, es necesario, definir con conjunto de reglas
difusas.
Después de elegir las variables adecuadas para las entradas y la salida del controlador
difuso, se requiere decidir sobre las variables lingüísticas. Esas variables transforman
los valores numéricos de las entradas al controlador difuso, a cantidades difusas. El
número de esas variables lingüísticas especifica la cualidad del control la cual se puede
lograr al emplear el controlador de lógica difusa. Cuando el número de variables
lingüísticas se incrementa, también se incrementan el tiempo computacional y el
requerimiento de memoria. Por lo tanto, es necesario realizar un balance entre la calidad
del control y el tiempo computacional al elegir el número de variables lingüísticas.
4.5.1 Base de Reglas Difusa empleadas por el controlador difuso P
La base de reglas difusas para el control automático de voltaje, AVR, propuesto
tomando en cuenta un controlador difuso P, su entrada el error y su salida es el voltaje
de campo.
35
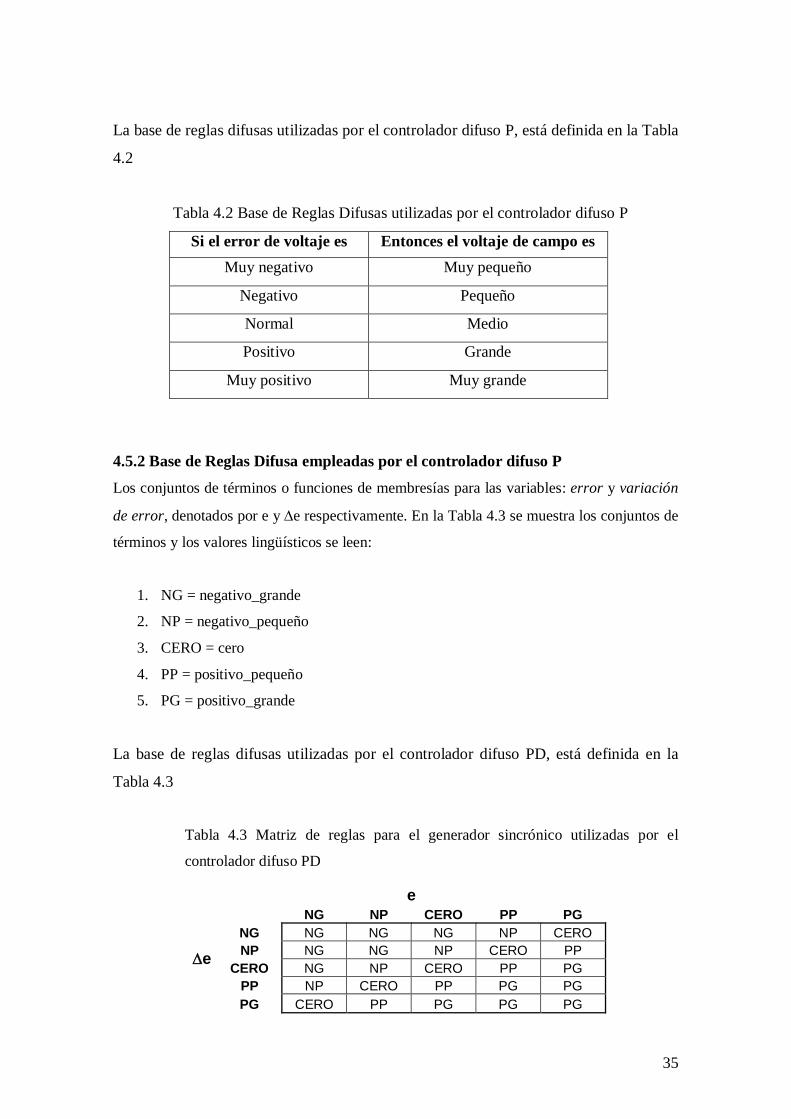
La base de reglas difusas utilizadas por el controlador difuso P, está definida en la Tabla
4.2
Tabla 4.2 Base de Reglas Difusas utilizadas por el controlador difuso P
Si el error de voltaje es Entonces el voltaje de campo es Muy negativo Muy pequeño
Negativo Pequeño
Normal Medio
Positivo Grande
Muy positivo Muy grande
4.5.2 Base de Reglas Difusa empleadas por el controlador difuso P Los conjuntos de términos o funciones de membresías para las variables: error y variación
de error, denotados por e y e respectivamente. En la Tabla 4.3 se muestra los conjuntos de
términos y los valores lingüísticos se leen:
1. NG = negativo_grande
2. NP = negativo_pequeño
3. CERO = cero
4. PP = positivo_pequeño
5. PG = positivo_grande
La base de reglas difusas utilizadas por el controlador difuso PD, está definida en la
Tabla 4.3
Tabla 4.3 Matriz de reglas para el generador sincrónico utilizadas por el
controlador difuso PD
e NG NP CERO PP PG
NG NG NG NG NP CERO NP NG NG NP CERO PP
CERO NG NP CERO PP PG PP NP CERO PP PG PG
∆e
PG CERO PP PG PG PG

36
Las 25 reglas de control difusas, son de la forma:
Regla i: SI el error X es NG y la variación_de_error Y es CERO, ENTONCES el
voltaje_de_campo es NG
Regla j: SI el error X es PP y la variación_de_error Y es NP, ENTONCES el
voltaje_de_campo es CERO
La matriz de reglas en la Tabla 4.3 cumple con las definiciones de completividad y
consistencia.
4.6 Respuesta del Generador
En la aplicación del controlador inteligente, se considera tres casos de estudio:
1. Generador sincrónico con control tradicional
2. Generador sincrónico con controlador difuso P
3. Generador sincrónico con controlador difuso PD
4.6.1 Respuesta del generador con un controlador tradicional
En la Fig. 4.2, se muestra el diagrama de bloques del generador sincrónico, que utiliza
como control de tensión de bornes del generador un regulador automático de voltaje,
AVR, es un control tradicional, ampliamente utilizado en la industria de generación
eléctrica.
En la Fig. 4.3, se muestra la respuesta que se obtiene al considerar el control tradicional
en el generador sincrónico.

37
Fig. 4.2 Diagrama de bloques del control de un generador sincrónico tradicional
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Control Tradicional
Tiempo [s]
Vt [
pu]
Escalon unitario
Respuesta
Fig. 4.3 Voltaje en bornes del generador sincrónico
4.6.2 Respuesta del Generador con un Controlador Inteligente
En la Fig. 4.4, se muestra el esquema general de control inteligente que utiliza un
controlador difuso PD.
38
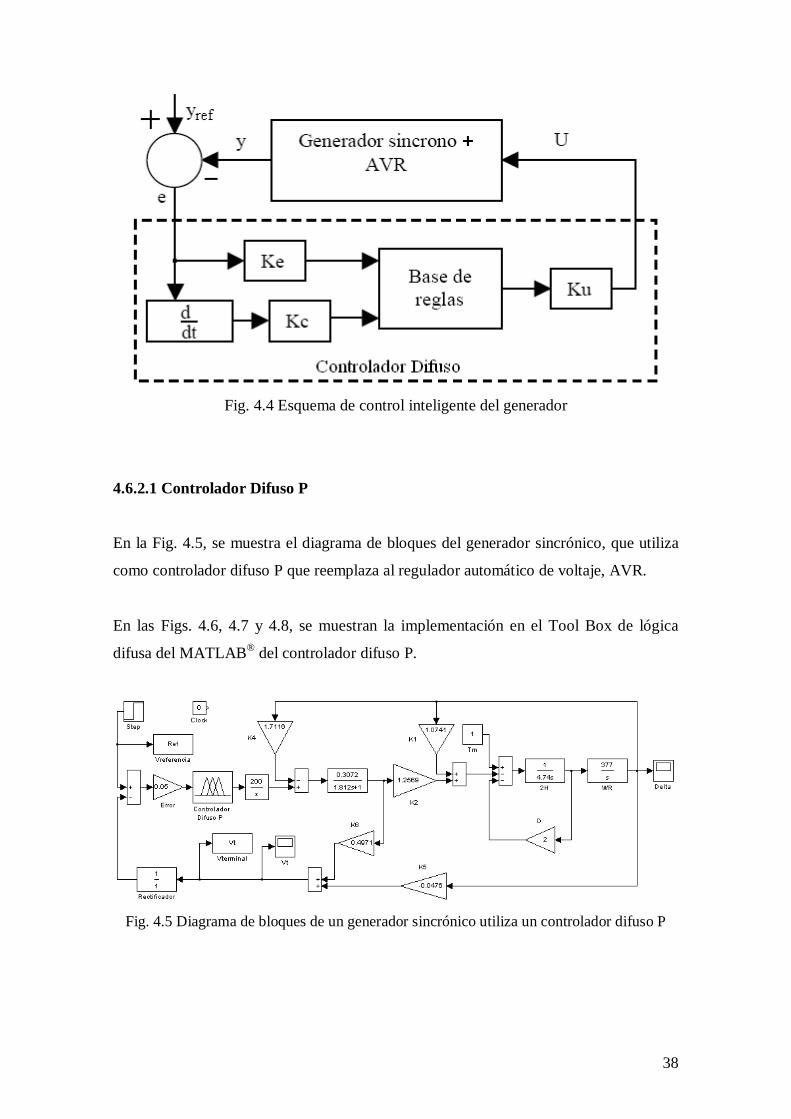
Fig. 4.4 Esquema de control inteligente del generador
4.6.2.1 Controlador Difuso P
En la Fig. 4.5, se muestra el diagrama de bloques del generador sincrónico, que utiliza
como controlador difuso P que reemplaza al regulador automático de voltaje, AVR.
En las Figs. 4.6, 4.7 y 4.8, se muestran la implementación en el Tool Box de lógica
difusa del MATLAB® del controlador difuso P.
Fig. 4.5 Diagrama de bloques de un generador sincrónico utiliza un controlador difuso P
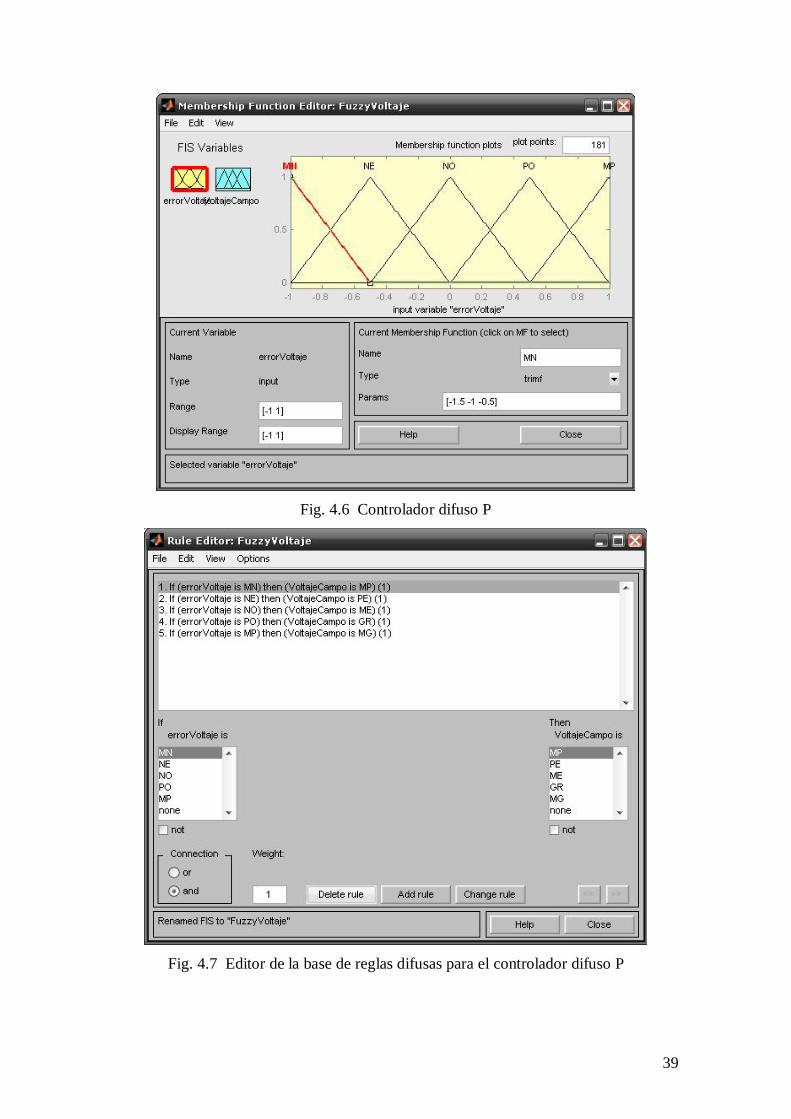
39
Fig. 4.6 Controlador difuso P
Fig. 4.7 Editor de la base de reglas difusas para el controlador difuso P
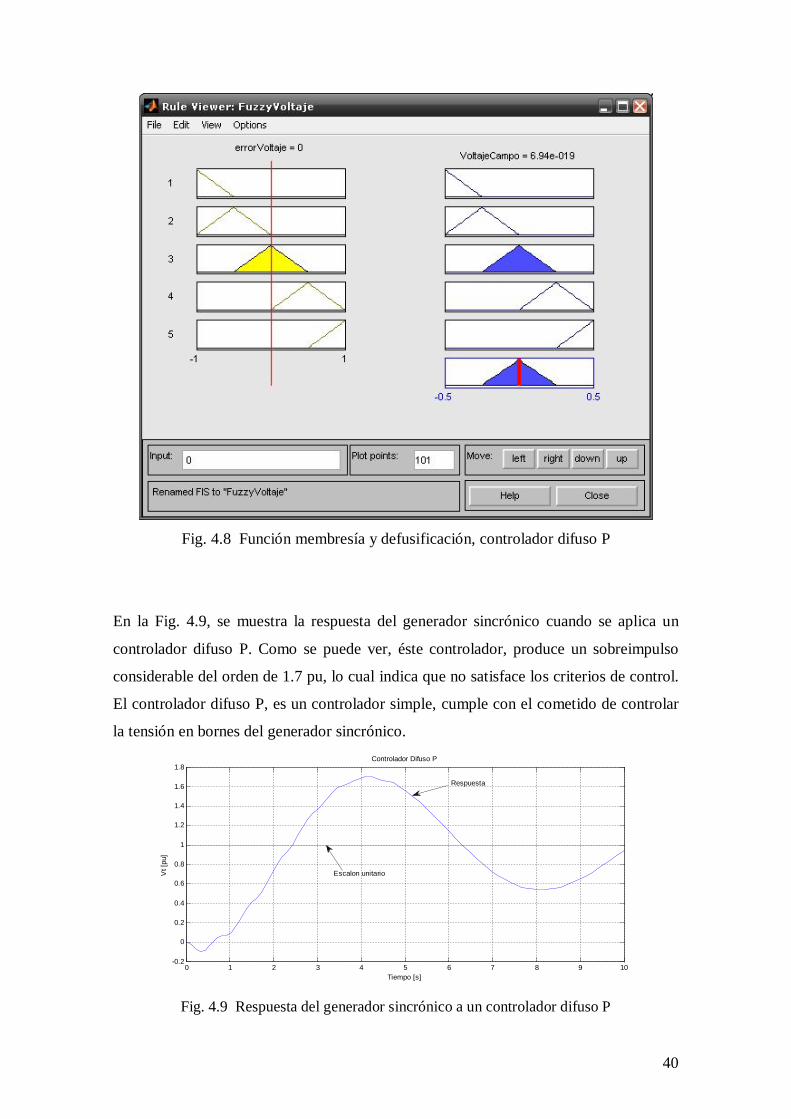
40
Fig. 4.8 Función membresía y defusificación, controlador difuso P
En la Fig. 4.9, se muestra la respuesta del generador sincrónico cuando se aplica un
controlador difuso P. Como se puede ver, éste controlador, produce un sobreimpulso
considerable del orden de 1.7 pu, lo cual indica que no satisface los criterios de control.
El controlador difuso P, es un controlador simple, cumple con el cometido de controlar
la tensión en bornes del generador sincrónico.
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Controlador Difuso P
Tiempo [s]
Vt [
pu]
Escalon unitario
Respuesta
Fig. 4.9 Respuesta del generador sincrónico a un controlador difuso P

41
4.6.2.2 Controlador Difuso PD
En la Fig. 4.10, se muestra el diagrama de bloques de un generador sincrónico que
utiliza un controlador difuso PD.
Fig. 4.10 Diagrama de bloques de un generador sincrónico utiliza un controlador difuso PD
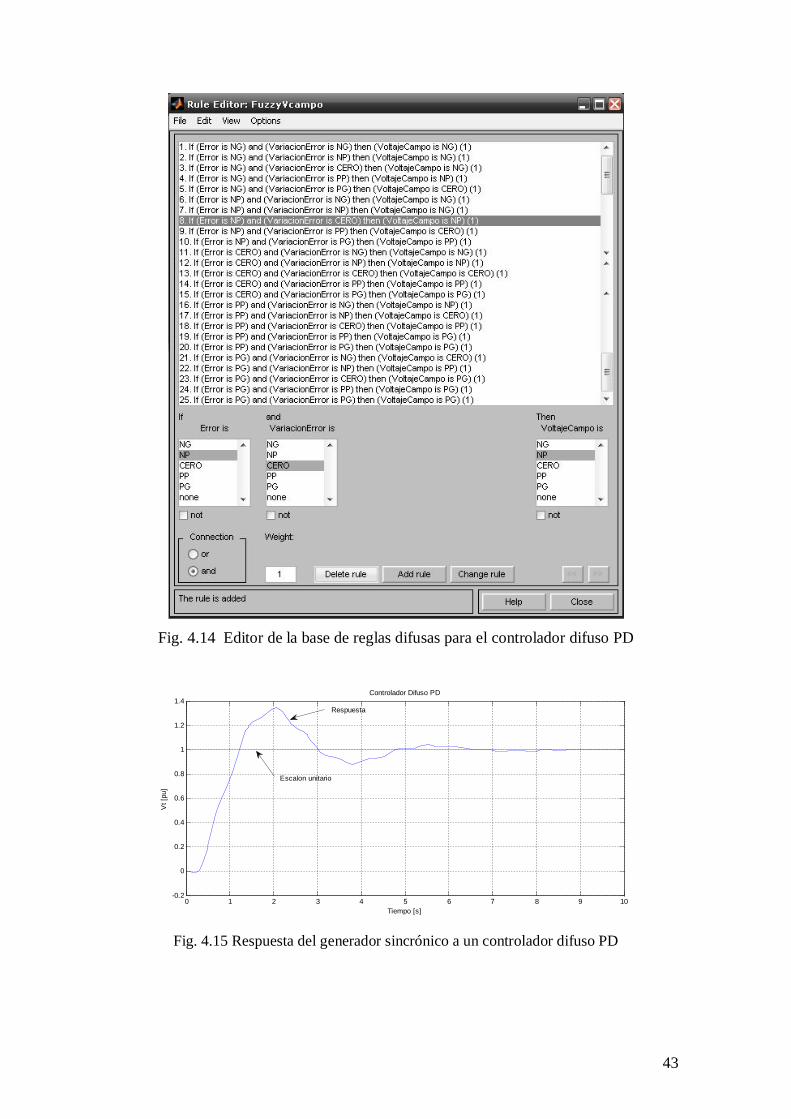
En las Figs. 4.11, 4.12, 4.13 y 4.14, se muestran la implementación en el Tool Box de
lógica difusa del MATLAB® del controlador difuso PD.
Fig. 4.11 Editor FIS

42
Fig. 4.12 Editor de la función membresía
Fig. 4.13 Función membresía y defusificación, controlador difuso PD
43
Fig. 4.14 Editor de la base de reglas difusas para el controlador difuso PD
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Controlador Difuso PD
Tiempo [s]
Vt [
pu]
Escalon unitario
Respuesta
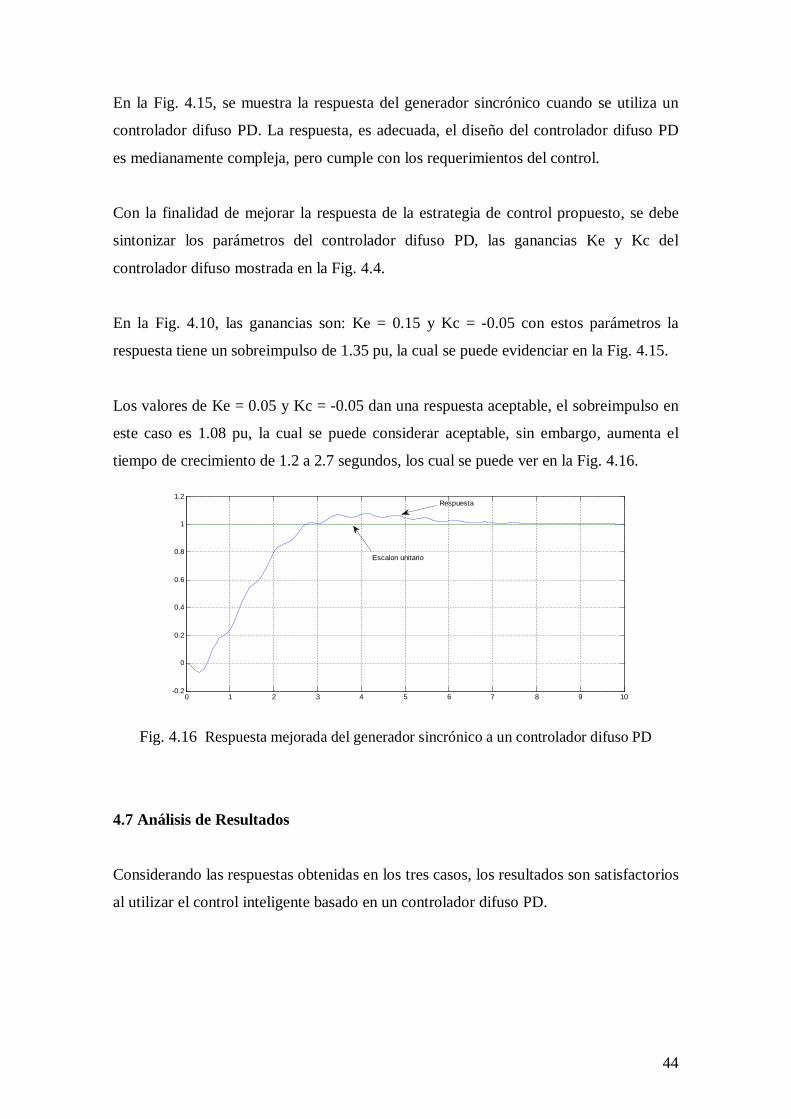
Fig. 4.15 Respuesta del generador sincrónico a un controlador difuso PD
44
En la Fig. 4.15, se muestra la respuesta del generador sincrónico cuando se utiliza un
controlador difuso PD. La respuesta, es adecuada, el diseño del controlador difuso PD
es medianamente compleja, pero cumple con los requerimientos del control.
Con la finalidad de mejorar la respuesta de la estrategia de control propuesto, se debe
sintonizar los parámetros del controlador difuso PD, las ganancias Ke y Kc del
controlador difuso mostrada en la Fig. 4.4.
En la Fig. 4.10, las ganancias son: Ke = 0.15 y Kc = -0.05 con estos parámetros la
respuesta tiene un sobreimpulso de 1.35 pu, la cual se puede evidenciar en la Fig. 4.15.
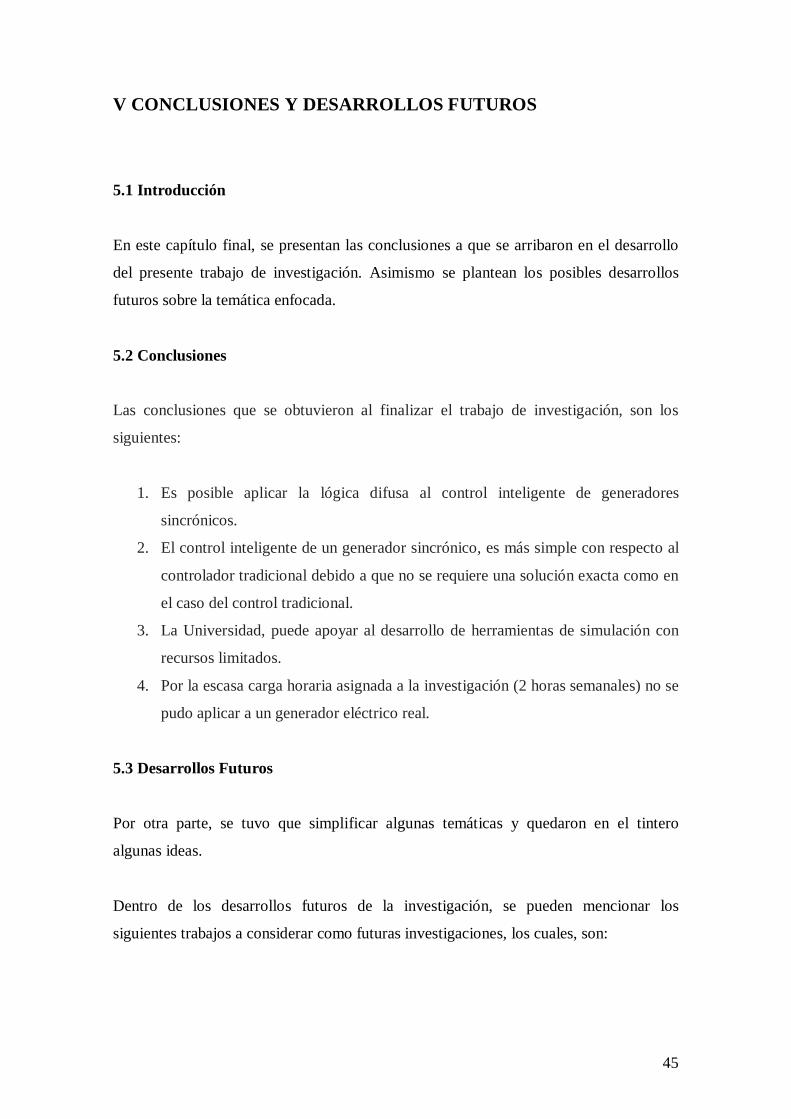
Los valores de Ke = 0.05 y Kc = -0.05 dan una respuesta aceptable, el sobreimpulso en
este caso es 1.08 pu, la cual se puede considerar aceptable, sin embargo, aumenta el
tiempo de crecimiento de 1.2 a 2.7 segundos, los cual se puede ver en la Fig. 4.16.
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Respuesta
Escalon unitario
Fig. 4.16 Respuesta mejorada del generador sincrónico a un controlador difuso PD
4.7 Análisis de Resultados
Considerando las respuestas obtenidas en los tres casos, los resultados son satisfactorios
al utilizar el control inteligente basado en un controlador difuso PD.
45
V CONCLUSIONES Y DESARROLLOS FUTUROS
5.1 Introducción
En este capítulo final, se presentan las conclusiones a que se arribaron en el desarrollo
del presente trabajo de investigación. Asimismo se plantean los posibles desarrollos
futuros sobre la temática enfocada.
5.2 Conclusiones
Las conclusiones que se obtuvieron al finalizar el trabajo de investigación, son los
siguientes:
1. Es posible aplicar la lógica difusa al control inteligente de generadores
sincrónicos.
2. El control inteligente de un generador sincrónico, es más simple con respecto al
controlador tradicional debido a que no se requiere una solución exacta como en
el caso del control tradicional.
3. La Universidad, puede apoyar al desarrollo de herramientas de simulación con
recursos limitados.
4. Por la escasa carga horaria asignada a la investigación (2 horas semanales) no se
pudo aplicar a un generador eléctrico real.
5.3 Desarrollos Futuros
Por otra parte, se tuvo que simplificar algunas temáticas y quedaron en el tintero
algunas ideas.
Dentro de los desarrollos futuros de la investigación, se pueden mencionar los
siguientes trabajos a considerar como futuras investigaciones, los cuales, son:
46
1. Aplicar la lógica difusa y redes neuronales al diseño de un controlador
inteligente de un generador eléctrico mediante un sistema de inferencia neuro-
difuso.
2. La inclusión de un algoritmo genético para la sintonización de los parámetros
del controlador difuso.

47
Referencias Bibliográficas
[1] A. Blanco, Control de Emergencias y Desprendimiento Óptimo de Carga.
Tesis de Magíster en Ciencias de la Ingeniería, PUCCh, Santiago de Chile, 1992.
[2] P. Kundur, Power System Stability and Control. McGraw-Hill Inc., New York,
1994.
[3] P. M. Anderson, A. A. Fouad, Power System Control and Stability. IEEE Press,
Piskataway, New York, 1994.
[4] T. Hiyama, ‘Rule-Based Stabilizer for Multi-Machine Power System’. IEEE
Trans. on Power Systems, Vol. 5, No. 2, may 1990, pp. 403-411.
[5] Carlos Buelna, Rogelio Soto, ‘PC Based Fuzzy-Neuro Controller For A
Synchronous Generator’, Proc. American Control Conference, San Diego,
California, junio, 1999, pp. 4223-4227.
[6] Carlos Buelna, Rogelio Soto, ‘Fuzzy-Neuro Controller for Synchronous
Generator’, 1997 IEEE, pp. TA2-3.1-TA2-3.3.
[7] F. Morales, et al., ‘Evaluación de Técnicas Basadas en Conocimiento para el
Diseño de Controles de Excitación en Sistemas de Potencia’. Ingeniería, PUCCh.
[8] F. Morales, et al., ‘Control Robusto en Sistemas de Potencia Multimáquinas
Utilizando Lógica Difusa y Teorías de Control H y Control Proyectivo’. Facultad
de Ingeniería, Pontificia Universidad Católica de Chile.
[9] M. Olivares y Ricardo Rojas, ‘Modelado y Control Difuso’. Dpto. Electrónica,
Universidad Técnica Federico Santa María.
[10] K. Solano, et al., ‘Controladores adaptables basados en mecanismos de Inferencia
difusa’. Pontificia Universidad Javierana Cali.
[11] H. Hoang, K. Tomsovic, ‘Design and Analysis of an Adaptive Fuzzy Power
System Stabilizer’. IEEE Trans. On Energy Conversion, Vol 11, No. 2, june
1996, pp. 455-461.
[12] M. Noroozian, et al.,’Robust, Near Time-Optimal Control of Power System
Oscillations With Fuzzy Logic’. IEEE Transactions on Power Delivery, Vol.
11, No. 1, january 1996, pp. 393-400.

48
[13] A. Esogbue, et al., ‘A Reinforcement Learning Fuzzy Controller for Set-Point
Regulador Problemas’. School of Industrial and Systems Engineering, Georgia
Institute of Tecnology.
[14] A. Esogbue, W. Hearnes II, ‘A Learning Algorithm for the Control of Continuous
Action Set-Point Regulator Systems’. School of Industrial and Systems
Engineering, Georgia Institute of Tecnology, September 16, 1998
[15] C. Falkner, B. Heck, ‘A Design of Passivity-Based Output Feedback
Controllers for Power System Stabilization’. Arkansas Tech University,
Georgia Institute of Technology.
[16] M. A. M. Hassan, O. P. Malik, G. S. Hope, ‘A Fuzzy Logic Based Stabilizer for a
Synchronous Machine’. IEEE Transactions on Energy Conversion, Vol. 6, No.
3, september 1991, pp. 407-413.
[17] M. A. M. Hassan, O. P. Malik, ‘Implementation and Laboratory Test Results for a
Fuzzy Logic Based Self-Tuned Power System Stabilizer’. IEEE Transactions on
Energy Conversion, Vol. 8, No. 2, june 1993, pp. 221-228.
[18] K. Tomsovic, M. Y. Chow, Tutorial on Fuzzy Logic Applications in Power
Systems. IEEE-PES Winter Meeting in Singapure, january 2000.
[19] M. A. Abido, Y. L. Abdel-Magid, ‘A Hybrid Neuro-Fuzzy Power System
Stabilizer for Multimachine Power Systems’. IEEE Trans. on Power Systems,
Vol. 13, No. 4, november 1998.
[20] M. A. Abido, Y. L. Abdel-Magid, ‘Hybridizing Rule-Based Power System
Stabilizer with Genetic Algorithms’. IEEE Trans. on Power Systems, Vol. 14,
No. 2, may 1999.
[21] Anderson, P.M. and Fouad, A. A., Power System Control and Stability. The
Iowa State University Press, Ames, Iowa, USA, 1977.
[22] Doris Sáez, ‘Lógica difusa, redes neuronales y control predictivo’. Técnicas
Modernas de Control, SEMINARIO AADECA-UBA. Marzo, 2002, Buenos
Aires.
[23] S. N. Sivanandam, et al., Introduction to Fuzzy Logic using MatLab. Springer-
Verlag Berlin Heidelberg, 2007.
[24] The MathWorksTM, Fuzzy Logic Toolbox™, For use with Matlab. User’s
Guide, version 2. 2002.
[25] The MathWorksTM, Fuzzy Logic Toolbox™ 2 User’s Guide. 2009a.
[26] The MathWorksTM, Simulink® 7 User’s Guide. 2009.

49
[27] I Rojas, Introducción a Simulink. Curso de Doctorado: Fundamentos de
Matlab/Simulink.
[28] M. Torres, “Modelo de PSS y AVR Basado en Lógica Difusa para un Generador
Sincrónico”. Universidad de Cundinamarca.

50
Anexos
Anexo A1 Calculo de Constantes Ki % Generador Sincrónico conectado a una barra infinita. % Ejemplos 4.1, 5.1, 6.6 y 6.7 [21] % Valores nominales S = 160 % MVA Vn = 15 % kV E = 375 % V I = 6158.40 % A If = 926 % A fp = 0.85 % (-) xd = 1.70 % pu xq = 1.64 % pu r = 0.001096 %pu Va = 1.00 % pu Tension en bornes del generador Sa = 1.00 % pu xtd=0.245 J=1.765 % kW s/hp % Linea de transmision Re = 0.02 % pu Le = 0.40 % pu Xe=0.40 % pu Ze = 0.4005 % pu phi = 87.138 % grados sexagesimales % Resultados: Generador conectado a barra infinita Vt0=Va % pu Vinf=0.828 % Tensión de la Barra infinita Eqa0=2.5995 % pu Id0=-1.112 % pu Iq0=0.385 % pu Vq0=0.776 % pu Vd0=-0.631 % pu delta0_alpha=66.995*pi/180 % rad % Calculo de las constantes % K1 kl=1/(Re^2+(xq+Xe)*(xtd+Xe)) K1=kl*Vinf*(Eqa0*(Re*sin(delta0_alpha)+(xtd+Xe)*cos(delta0_alpha))+Iq0*(xq-xtd)*((xq+Xe)*sin(delta0_alpha)-Re*cos(delta0_alpha))) % K2 K2=kl*(Iq0*(Re^2+(xq+Xe)^2)+Eqa0*Re) % K3 K3=1/(1+kl*(xd-xtd)*(xq+Xe)) % K4 K4=Vinf*kl*(xd-xtd)*((xq+Xe)*sin(delta0_alpha)-Re*cos(delta0_alpha)) % K5 K5=(kl*Vinf*xtd*Vq0/Vt0)*(Re*cos(delta0_alpha)-(xq+Xe)*sin(delta0_alpha))-(kl*Vinf*xq*Vd0/Vt0)*((xtd+Xe)*cos(delta0_alpha)+Re*sin(delta0_alpha)) % K6 K6=(Vq0/Vt0)*(1-kl*xtd*(xq+Xe))-(Vd0/Vt0)*kl*xq*Re