condiciones de rigidez en nu-configuraciones principales de superficies inmersas en r^4
TRANSCRIPT
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Condiciones de rigidez en ν-configuracionesprincipales de superficies inmersas en R4
R. García1
1Facultad de matemáticasUniversidad Autónoma de Yucatán
Coloquio FMAT-CIMAT, 2016

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Outline
Introducción
Configuraciones principales en R3.
ν-Configuraciones principales
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Geometría de superficiesGeometría de Superficies
DefiniciónUna superficie S ⊂ R3 es un subespacio topológico quelocalmente parece un abierto en R2, en el sentido queexisten homeomorfismos locales φ : U ⊂ S → V ⊂ R2.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
En general, una superficie es un caso particular de variedad.Es posible dar una definición más general, que no hacereferencia a la inclusión en R3. En este caso pedimos que Ssea hausdorff segundo contable.
Si cada vez que tenemos dos homeomorfismos localesφk : Uk → Vk , k = 1, 2 tales que U1 ∩ U2 6= ∅, el mapeoφ2 ◦ φ−11 : φ1(U1 ∩ U2)→ φ2(U1 ∩ U2) es diferenciable,decimos que S, es diferenciable. Análogamente, si cadacomponente de φ2 ◦ φ−11 es una función de claseC r (φ1(U1 ∩ U2)), decimos que S es también de clase C r .

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
EjemplosSi F : R3 → R es tal que F ∈ C1(R3) y siempre queF (x) = 0, se tiene que ∇F (x) 6= 0, el teorema de la funciónimplícita garantiza que F−1(0) será una superficie, al menosde clase C1.En particular, la esfera de radio r
x2 + y2 + z2 = r2,
y los hiperboloides
x2 + y2 − z2 = r2, −x2 − y2 + z2 = r2,
Son superficies suaves.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Estudiar la geometría de la superficie consiste en estudiar laspropiedades métricas, por ejemplo, medir ángulos ydistancias entre puntos.
Hay dos clases de geometría: la intrínseca, y la extrínsica.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
El plano tangente
DefiniciónSi S ⊂ R3 es una superficie de clase C1, un vector v ∈ R3 sedice tangente a S en p, si existe una curva γ : I → S, talque γ(0) = p, y γ′(0) = v . La unión disjunta
∪p∈S {(p, v) : v tangente a S en p }
se llama el haz tangente, TS.
ObservaciónSi S no es un subconjunto de Rn, aún es posible definir unanoción de espacio tangente y de haz tangente, aunque es unpoco más abstracta.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Geometría intrínseca
DefiniciónUna métrica Riemanniana es una función que a cada puntop ∈ S asigna un tensor simétrico definido positivogp ∈ T ∗p S ⊗ T ∗p S.
Lo que esta definición dice, es que hay una manera deasignar a cada plano tantente TpS un producto interno gp,que nos permite medir ángulos y distancias en el espaciotangente.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
El haz normal
DefiniciónDada una superficie S ⊂ R3 de clase C1, definimos el haznormal
NS = ∪p∈S {(p,w) : w ⊥ v para todo v tangente a S en p}
El haz normal es un ejemplo de haz vectorial, en este casode rango 1.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Geometría extrínseca
Si S ⊂ R3, es posible definir una métrica Riemannianarestringiendo el producto euclidiano a cada plano tangente.
Es posible describir cómo la superficie se curva dentro de R3
utilizando el mapeo de Gauss.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Mapeo de Gauss
DefiniciónSi S ⊂ R3 es una superficie C1 orientada, la funciónN : S → S2, tal que a cada p ∈ S, le asigna el vector normalunitario en NpS compatible con la orientación, se llama elmapeo de Gauss.
ProposiciónEs posible identificar TpS con TN(p)S2, de manera que laderivada del mapeo de Gauss es un operadordNp : TpS → TpS.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Ejemplos
Intuitivamente, el mapeo de Gauss nos dice cómo se curva lasuperficie localmente.
I Si S = S2 es la esfera, entonces N(p) = p, ∀p ∈ S2, demodo que dNp = Idp.
I Análogamente, si S es la esfera de radio r , uno puedeprobar que dNp = 1
r Idp.I En el caso de los hiperboloides, hay una dirección en la
que el mapeo de Gauss invierte la dirección, y otro en elque la preserva.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Curvatura seccional
DefiniciónDada una curva diferenciable γ : I → S, con γ(0) = p, lacurvatura seccional de S en p en la dirección de v = γ′(0),es 〈dNp(v), v〉/||v ||.
I dNp es un operador autoadjunto.I Como dNp es autoadjunto, es diagonalizable, i.e.
existen dos direcciones perpendiculares, vi ∈ TpS, y dosvalores de la curvatura, ki , tales que dNp(vi ) = kivi .

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Puntos umbílicos
DefiniciónUn punto p ∈ S se dice umbílico, si las curvaturasprincipales son iguales.Si un punto es umbílico, en todas las direcciones tangentes adicho punto, la curvatura se ve igual.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
EjemplosI En la esfera, todos los puntos son umbílicos. La
curvatura se ve igual en todas direcciones.I En el elipsoide de rotación,
x2a2 + y2
a2 + z2b2 = 1,
los dos polos (0, 0,±b) son puntos umbílicos.I En el caso general
x2a2 + y2
b2 + z2c2 = 1,
con los tres parámetros diferentes, se puede probar quehay cuatro puntos umbílicos.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Direcciones principales
ProposiciónSi p ∈ S no es umbílico, las direcciones de máxima y mínimacurvatura son las curvaturas principales, más aún, comofunciones del punto, ambas son diferenciables en unavecindad de p.
Si p ∈ S no es umbílico, las direcciones principales, es decir,las direcciones propias determinadas por las curvaturasprincipales, definen dos foliaciones ortogonales de lasuperficie, llamadas las líneas de curvatura de la superficie.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Ejemplo
Figure: Puntos umbílicos y líneas de curvatura.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Ejemplo
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Dinámica de configuraciones principales
Localmente, si (u, v) representa un sistema de coordenadasen S, las líneas de curvatura satisfacen la ecuación diferencial
Adu2 + Bdudv + Cdv2 = 0,
donde,
A = fG − gF ,B = eG − gE ,C = eF − fE ,
y e, f , g son los coeficientes de la métrica, y E , F , G los dela segunda forma fundamental en la carta coordenada.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Inmersiones
DefiniciónDada una superficie abstracta S, una inmersión es un mapeoα : S → R3, tal que la derivada α∗ es inyectiva para cadap ∈ S.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
I Dada una inmersión α, esta induce una métricaRiemanniana en S dada por g(v ,w) = 〈α∗v , α∗w〉,para v ,w ∈ TpS.
I De la misma forma, α permite jalar el haz tangenteTR3 → R3, hacia S: α∗
(TR3)→ S.
I Bajo esta identificación, se tiene una descomposición
α∗(TR3
)∼= TS ⊕ NS, (1)
donde NS, el haz normal, es el complemento ortogonalde TS bajo la identificación TS ↪→ α∗
(TR3).

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
El espacio de las inmersiones
DefiniciónSea I r ,s el espacio de las inmersiones S → R3 de clase C r ,con la topología C s de Hirsch, s ≤ r .
DefiniciónDada una inmersión α de clase C r , sean Uα el conjunto depuntos umbílicos de la inmersión, Fi ,α las lineas de curvaturaprincipal correspondientes. La terna Pα = (Uα,F1,α,F2,α) sellama la configuración principal de la inmersión.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Estabilidad estructural
Definiciónα ∈ I r ,s es C s estructuralmente estable, si existe unavecindad V de α en I r ,s , tal que para cada β ∈ V , existe unhomeomorfismo h : S → S, tal que mapea Uα sobre Uβ, ymanda las lineas Fi ,α sobre las líneas Fi ,β.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Geometría de las configuraciones principales
DefiniciónDada una inmersión α, u, v ∈ TpS, la torsión geodésica sedefine como
τα(v ,w) = 〈dNα(u) ∧ dα(w),Nα〉,
donde Nα es el mapeo de Gauss, y ∧ representa el productovectorial en R3.
DefiniciónSea Π : PS → S el haz proyectivo definido por el haztangente, es decir, por cada p ∈ S, consideramos el conjuntode líneas que pasan por el origen en TpS.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Si (u, v) es una carta definida en una vecindad U ⊂ S,entonces, es posible definir dos cartas (u, v , p = dv/du),(u, v , q = du/dv) que cubren Π−1(U). Nótese que laexpresión local de la ecuación de líneas de curvatura sepuede extender al haz proyectivo.
ProposiciónPara cada α ∈ I r ,s , el conjunto,
Lα = {τα = 0}
es una variedad en PS, que es regular de clase C r−2 enS\Uα, cubre dos a uno S\Uα, y contiene una líneaproyectiva Π−1(p) sobre cada p ∈ Uα.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Configuraciones Darbouxianas
DefiniciónUn punto p ∈ Uα es Darbouxiano, si se cumplen lassiguientes condiciones:1. Lα es regular sobre Π−1(p), es decir, dτα 6= 0.2. Ambas líneas de curvatura se levantan en un solo
campo de líneas `α de clase C r−3, tangente a Lα, quese puede extender de manera única sobre Π−1(p) demanera que tenga solamente singularidadeshiperbólicas, de uno de los siguientes tipos:
D1 Una sola silla.D2 Un único nodo entre dos sillas.D3 Tres sillas.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Figure: Configuraciones Darbouxianas en la superficie
Figure: Levantamiento al haz proyectivo

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Bifurcación D12
DefiniciónUn punto umbílico aislado es de tipo D1
2 si sigue cumpliendola condición de regularidad, Lα regular sobre Π−1(p), peroahora en lugar de la segunda condición cumple lo siguiente:
D12 Las líneas principales se levantan a un solocampo de líneas en Lα, que se extiende demanera única a Π−1(p), en donde se encuentrauna singularidad en forma de silla hiperbólica,y un nodo-silla, cuya variedad central seencuentra sobre la línea proyectiva quecorresponde a p.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
La notación D12 es debida a la siguiente proposición.
ProposiciónSi α ∈ I r , r ≥ 5, satisface la condición D1
2 , en un puntoumbílico p, entonces existe una función B de clase C r−3 enuna vecindad W de α, y una vecindad V de p, tal que cadaβ ∈W posee un único punto umbílico en pβ ∈ V , tal que1. dB(α) 6= 0,2. B(β) > 0 sii pβ es de tipo D1.3. B(β) < 0 sii pβ es de tipo D2.4. B(β) = 0 sii pβ es de tipo D1
2 .

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Levantamiento de D12
Figure: Comparación de D1, D12 y D2

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Bifurcación D12,3
DefiniciónUn punto umbílico aislado es de tipo D1
2,3 si falla lacondición de transversalidad en dos puntos sobre sí mismo,en los cuales Lα es no degerada de tipo Morse.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
ProposiciónSi α ∈ I r , r ≥ 5, y p ∈ S satisface la condición D1
2,3,entonces, existe una función B de clase C r−3 en unavecindad W de α, y una vecindad V de p tales que1. dB(α) 6= 0,2. B(β) > 0 sii β no tiene puntos umbílicos en V .3. B(β) < 0 sii β tiene dos puntos umbílicos de tipos D2 y
D3 en V .4. B(β) = 0 sii β tiene un único punto umbílico en V de
tipo D12,3.
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
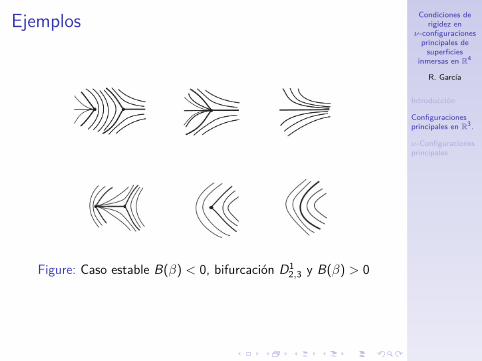
Ejemplos
Figure: Caso estable B(β) < 0, bifurcación D12,3 y B(β) > 0

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Ejemplo: Bifurcación D12,3

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Ejemplo: Configuraciones principales en lasciencias aplicadas
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
ν-Configuraciones principales
Sea α : S → R4. Como en el caso tridimensional, α induceuna descomposición α∗
(R4) ∼= TS ⊕ NS.
En R4, el haz normal es de rango 2, por lo que ya no esposible definir el mapeo de Gauss. Sin embargo, todavía esposible definir direcciones principales y puntos umbílicos,toda vez que mantengamos fijo un campo normal unitarioν : S → NS.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Geometría de superficies en R4
Debido al isomorfismo α∗(R4) ∼= TS ⊕ NS, la conexión ∇̃
en TR4, induce una conexión en el pullback, tal que laproyección ∇ = ∇̃t coincide con la connección de Levi-Civitaen S, y tal que la proyección al haz normal, ∇⊥ escompatible con la restricción de la métrica inducida.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Las ecuaciones fundamentales
Sean Rm, Rm, Rm⊥ los tensores de curvatura de ∇̃, ∇ y∇⊥ respectivamente.
Theorem (Gauss’ equation)Sean X ,Y ,Z ,W ∈ TS, entonces
Rm(X ,Y ,Z ,W ) = Rm(X ,Y ,Z ,W ) + g(α(X ,Z ), α(Y ,W ))− g(α(X ,W ), α(Y ,Z )).
Theorem (Codazzi-Mainardi equation)Sean X ,Y ,Z ∈ TM, entonces
(Rm(X ,Y )Z )⊥ = (∇⊥Xα)(Y ,Z )− (∇⊥Yα)(X ,Z )

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Theorem (Ricci’s equation)Sean X ,Y ∈ TM y ν ∈ NM,
(Rm(X ,Y )ν)⊥ = Rm⊥(X ,Y )ν + α(SνX ,Y )− α(X , SνY ).
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
En todos los casos, α : TM × TM → NM es la segundaforma fundmamenta,
α(X ,Y ) = (∇̃XY )⊥,
y Sν : TM → TM es el ν-operador de forma, que generalizaal mapeo de Gauss,
SνX = −(∇̃Xν
)t.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
El teorema fundamental de las subvariedades
I Las ecuaciones fundamentales representan condicionesde rigidez para la inmersión de una subvariedad en otra,pues cualesquiera dos inmersiones que cumplan las tresecuaciones deben estar relacionadas por unatransformación afín del espacio ambiente, en este casoR4.
I Salvo ciertas modificaciones, lo mismo es cierto para lasecuaciones equivalentes que corresponden a inmersionesisométricas en las otras formas espaciales: Sn(r) yHn(r).

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Inmersiones de codimensión dos
Dada ν, una sección del haz normal, Eν denota el haz cuyafibra en p es el espacio generado por νp.
I Eν es ∇⊥ plano.I La ecucación de Ricci en Eν se simplifica en
(Rm(X ,Y )ν)⊥ = 0.
I Si{ν, ν⊥
}es una base local unitaria de NM,
α = lν ν + l⊥ν ν⊥.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
TheoremIn codimension two, Gauss equation becomes:
Rm(X ,Y ,Z ,W ) = Rm(X ,Y ,Z ,W ) + lν(X ,Z ) lν(Y ,W )− lν(X ,W ) lν(Y ,Z )+ l⊥ν (X ,Z ) l⊥ν (Y ,W )− l⊥ν (X ,W ) l⊥ν (Y ,Z ).
TheoremCodazzi-Mainardi equation in codimension two has a νcomponent given by
g(Rm(X ,Y )Z , ν) = (∇⊥X lν)(Y ,Z )− (∇⊥Y lν)(X ,Z )+ l⊥ν (Y ,Z )g(∇⊥Xν⊥, ν)− l⊥ν (X ,Z )g(∇⊥Y ν⊥, ν).

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
TheoremRicci equation in codimention two is equivalent to
(Rm(X ,Y )ν)⊥ = Rm⊥(X ,Y )ν + g([S⊥ν ,Sν ] X ,Y )ν⊥,
where [S⊥ν ,Sν ] = S⊥ν Sν − SνS⊥ν is the commutator.
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
CorollaryThe image of an isometrically immersed surface f : M → R4
belongs to a hyperplane if and only if there exists a normalsection ν⊥ parallel with respect to the ambient connection.This is a special case for a more general theorem due toErbacher.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
ν-puntos umbílicos
Una vez fijada una sección normal unitaria ν, el operador deforma nos permite definir una ν dirección principal, yν-curvatura principal, como la dirección generada por unvector propio, y el respectivo valor propio.
Como sucede en el caso de tres dimensiones, un punto p ∈ Ses ν-umbílico, si Sν es un múltiplo del operador identidad enel punto.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Rigidez de los puntos umbílicos
TeoremaDada α : S → R4 inmersión isométrica, si U ⊂ S es abierto,simplemente conexo, y ν, ν⊥ son tales que U es totalmenteν y ν⊥ umbílico, entonces α(U) está contenido ya sea en unplano bidimensional o en una esfera de dimensión 2.
I Este teorema es la contraparte del teorema análogopara inmersiones en R3.
I No es necesario suponer que ν y ν⊥ sean una baseortogonal.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Sea f : U ↪→ R3 ⊂ R4 una inmersión isométrica. Entonces,necesariamente existe un campo normal unitario, paralelo, demanera que f es totalmente umbílica respecto de estecampo. Sin embargo, f es arbitraria como inmersión de U aR3. Por lo tanto, la hipótesis de tener dos direccionestotalmente umbílicas es esencial para que el teorema seacierto.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Dinámica de ν-configuraciones principalesEn el caso de una inmersión en R4, las configuracionesprincipales y la bifurcación dependen del campo normal de laforma que se aprecia en la imagen
En este caso, los coeficientes b y d que parametrizan laconfiguración dependen del jet de la inmersión en unavecindad del punto umbílico.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Referencias I
L.V." "Ahlfors and L." "Sario, Riemann surfaces,Princeton University Press, Princeton, N. J., 1960.
Marcos Dajczer, Submanifolds and isometricimmersions, Publish or Perish, Inc, 1990.Manfredo P. do Carmo, Riemannian geometry,Birkhäuser, Boston, 1992.Joseph Erbacher, Reduction of the codimension of anisometric immersion, J. Differential Geom. 5 (1971),no. 3-4, 333–340.
, Isometric immersions of constant meancurvature and triviality of the normal connection,Nagoya Math. J. 45 (1972), 139–165.
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Referencias II
C. Gutierrez and J. Sotomayor, Structurally stableconfigurations of lines of principal curvatures, Astérisque98-99 (1982), 195–215.
, Lines of curvature, umbilic points andcarathéodory conjecture, Resenhas 3 (1998), 291–322.
C. Gutierrez and F. Sánchez-Bringas, On a loewner’sumbilic index conjecture for surfaces in R4, J. Dynam.Control Systems 4 (1998), no. 1, 127–136.
Victor Guillemin, Differential topology, Prentice-Hall,1974.H. Hamburger, Beweis einer carathéodoryschenvermutung i , Ann. of Math. 41 (1940), 63–68.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Referencias III
D. Hilbert and S. Cohn-Vossen, Geometry and theimagination, Chelsea Publishing Company, New York,1932.Heinz Hopf, Differential geometry in the large, StanfordUniversity, 1956.
John M. Lee, Riemannian manifolds: An introduction tocurvature, Springer-Verlag, New-York, 1997.
William S. Massey, Algebraic topology: An introduction,Springer-Verlag, 1967.
John W. Milnor, Topology from the differentiableviewpoint, Princeton University Press, Princeton, NewJersey, 1965.
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Referencias IV
Matías Navarro, Bifurcaciones de puntos umbílicossimples de superficies inmersas en R4, Ph.D. thesis,Universidad Nacional Autónoma de México, 2001."J. M. Gutiérrez Núñez", "C. Romero Fuster", and"F. Sánchez-Bringas", Codazzi fields and loewner’sconjecture for surfaces in 4-space, por aparecer.
M. Navarro and F. Sánchez-Bringas, Bifurcations ofsimple umbilical points defined by vector fields normal toa surface immersed in R4, Qual. Theory Dyn. Sist. 2(2001), 359–380.
T. Rado, über den begriff der riemannschen fläsche,Acta Litt. Sci. Szeged 2 (1925), 101–112.

Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-Configuracionesprincipales
Referencias V
M. Spivak, A comprehensive introduction to differentialgeometry, A Comprehensive Introduction to DifferentialGeometry, no. v. 3, Publish or Perish, Incorporated,1975.Michael Spivak, A comprehensive introduction todifferential geometry, 3rd ed., vol. Vol.3., Publish orPerish, 1999.J. Wolf, Spaces of constant curvature, AmericanMathematical Society, 2010.
Condiciones derigidez en
ν-configuracionesprincipales desuperficies
inmersas en R4
R. García
Introducción
Configuracionesprincipales en R3.
ν-ConfiguracionesprincipalesGracias