cap´ıtulo 4 bifurcaciones de un brazo rob´otico de un...
TRANSCRIPT

Capıtulo 4
Bifurcaciones de un brazo roboticode un grado de libertad
4.1. Introduccion
En este capıtulo se presenta el analisis de bifurcaciones de un brazo roboticovertical (pendulo invertido simple completamente actuado) de un grado de libertad,controlado de dos formas: por realimentacion lineal del vector de estados y medianteuna ley de control hamiltoniana. Se pretende con esto ilustrar los conceptos introdu-cidos en capıtulos anteriores sobre teorıa de bifurcaciones y las tecnicas de analisis debifurcaciones en sistemas no lineales.
Este sistema, que a primera vista puede parecer enganosamente simple, presenta unagran variedad de comportamientos dinamicos (locales y globales) debidos a la propiano linealidad del sistema, a la introducida por el control (en el caso de ley de controlhamiltoniana) y a la saturacion de la senal de control, fenomeno que se encuentrapresente en todos los sistemas debido a la limitacion en los actuadores [Pag99].
El sistema esta compuesto por un motor electrico colocado en posicion horizontalque acciona un brazo que es el pendulo (figura 4.1). El objetivo del sistema es mantenerel brazo en posicion vertical. Este es un problema de control muy simple pero que, tal ycomo se vera en el desarrollo del capıtulo, presenta una gran riqueza de comportamientodinamico.
El desarrollo del capıtulo sera el siguiente: En primer lugar se procedera a calcularel modelo del sistema usando formulacion lagrangiana y hamiltoniana y formulando lasecuaciones que describen el comportamiento del sistema como un sistema hamiltoniano
93

94 4.2. MODELO DEL SISTEMA
generalizado.
A continuacion se efectuara el analisis de bifurcaciones del sistema usando una leyde control calculada por realimentacion lineal del vector de estados y tomando comoparametros de bifurcacion los coeficientes de la ley de control. En primer lugar se su-pondra que la ley de control no esta saturada y posteriormente se tendra en cuenta lasaturacion. En ambos casos se calculara el numero de equilibrios y su estabilidad, carac-terizando las bifurcaciones asociadas a ellos y se estudiara la existencia de bifurcacionesasociadas a ciclos lımite, ası como bifurcaciones de caracter global.
Por ultimo se realizara un analisis similar del sistema cuando esta controlado poruna ley obtenida por moldeo de la energıa potencial del sistema. Dicha ley de controlpermitira que el sistema conserve la simetrıa.
En cada uno de los analisis se presentan los distintos diagramas y conjuntos debifurcaciones como resumen de los resultados obtenidos en los analisis realizados.
4.2. Modelo del sistema
Para obtener el modelo de un pendulo invertido simple de longitud 2l como elde la figura 4.1 es necesario conocer el valor de la energıa cinetica:
θθ
g
l
m
τ
Figura 4.1: Pendulo invertido simple
T =1
2Jaθ
2,

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 95
y de la energıa potencial:
V = mgl cos θ,
donde θ el angulo del pendulo medido desde la posicion superior; Ja representa lainercia del sistema; m es la masa del brazo y g es la gravedad.
Ademas existen dos fuerzas no potenciales que son el par motor τ y la friccion delsistema ρθ (se supone que solo existe friccion viscosa), donde ρ es el coeficiente derozamiento asociado a la friccion.
Usando estas expresiones la funcion de Lagrange es:
L(θ, θ) = T − V =1
2Jaθ
2 − mgl cos θ, (4.1)
a partir de esta funcion podemos obtener la ecuacion que modela el comportamientodel sistema de la expresion:
d
dt
(∂L
∂θ
)− ∂L
∂θ= τ − ρθ
y queda de la forma:
Jaθ + ρθ − mgl sen θ = τ. (4.2)
Las ecuaciones del sistema pueden tambien ser obtenidas como un sistema hamil-toniano generalizado [Van96].
Usando las coordenadas hamiltonianas q = θ y p = Jaθ, la funcion de Hamilton es:
H(q, p) = T + V =1
2
p2
Ja
+ mgl cos q, (4.3)
y por la tanto las ecuaciones hamiltonianas correspondientes, de las que se obtiene elmodelo del sistema, son:
q =∂H
∂p=
p
Ja
p = −∂H
∂q− ρθ + τ = mgl sen q − ρ
Ja
p + τ = α sen q − βp + u,
donde α = mgl; β = ρJa
y u = τ .
Este es un ejemplo simple de un sistema de control hamiltoniano generalizado condisipacion [Van96] de la forma

96 4.2. MODELO DEL SISTEMA
x = [J − R]∂H
∂x+ gu, (4.4)
donde
x =
[x1
x2
]=
[qp
]∈ S1 × R,
J =
[0 1
−1 0
],R =
[0 00 ρ
],g =
[01
]
.
Como puede observarse ambas descripciones, lagrangiana y hamiltoniana son equi-valentes.
Se observa a partir del modelo del sistema que ante una senal de control nula, elsistema tiene simetrıa en θ. En efecto, el espacio de fases es un cilindro S1×R. Ası pues,para conservar la simetrıa en el espacio de fases, y que el sistema una vez controladosiga siendo simetrico en θ, la ley de control u debe ser una funcion periodica en θ.
Si ademas de la no linealidad propia del sistema, se tiene en cuenta la saturacionde la ley de control (como ya se ha indicado anteriormente en todos los sistemas realesexiste una saturacion en los actuadores), entonces el modelo matematico del sistemaes de la forma:
x = [J − R]∂H
∂x+ g sat(u), (4.5)
donde, por simplicidad, la funcion saturacion sat(.) se supone normalizada (figura. 4.2):
sat(u) =
⎧⎪⎨⎪⎩−1 si u ≤ −1
u si − 1 ≤ u ≤ 1 .
1 si u ≥ 1
El modelo del sistema que se utiliza en el analisis de bifurcaciones que se realiza acontinuacion es el expresado en la forma de sistema hamiltoniano generalizado, ya queesta formulacion sera de gran utilidad para desarrollar la ley de control del apartado4.4.1 a partir del moldeo de la energıa potencial del sistema.

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 97
u
sat (u)
-1
-1
1
1
Figura 4.2: Saturacion normalizada.
4.3. Bifurcaciones con una ley de control lineal
En este apartado se va a utilizar una ley de control por realimentacion linealdel vector de estados [PPA00], es decir, la ley de control sera formulada de la forma:
u = −l1q − l2p,
donde los parametros l1 y l2 seran tomados como parametros de bifurcacion. En losucesivo el parametro l1 se tomara siempre positivo (l1 < 0 no tiene ningun sentidopractico), y el parametro l2 podra tomar valores positivos o negativos (en el caso enque se introduzca una compensacion de la friccion del sistema).
Dado que la ley de control lineal no es periodica en q, el espacio de fases dejara deser un cilindro S1 × R para pasar a ser R
2, lo que es importante si se trata de disenaruna ley de control global y no una que actue solo ante pequenas perturbaciones entorno a la posicion de equilibrio.
En efecto,una perdida de simetrıa con respecto al angulo θ quiere decir que laposicion vertical del brazo solo puede obtenerse dentro del intervalo [0, 2π].
Fuera de este, al no haber simetrıa, no puede alcanzarse la posicion vertical. Portanto, este tipo de leyes no simetricas no deben usarse para grandes perturbaciones ala posicion de equilibrio del sistema.
Para mostrar los efectos de la saturacion se analizara primero el sistema sin satu-racion en el actuador (Ec. (4.4)) y posteriormente teniendola en cuenta (Ec. (4.5)).

98 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
4.3.1. Analisis del sistema con ley de control lineal no satura-da
Las ecuaciones que modelan el comportamiento del sistema en este caso son:
q =p
Ja
p = α sen q − βp − l1q − l2p.
El primer paso del analisis consiste en determinar los posibles puntos de operacion,es decir, los puntos de equilibrio para distintos valores de los parametros.
Resolviendo las ecuaciones correspondientes (q = 0, p = 0), se obtiene que todos lospuntos de equilibrio verifican p = 0 (velocidad nula) y han de cumplir la ecuacion
sen q =l1α
q, (4.6)
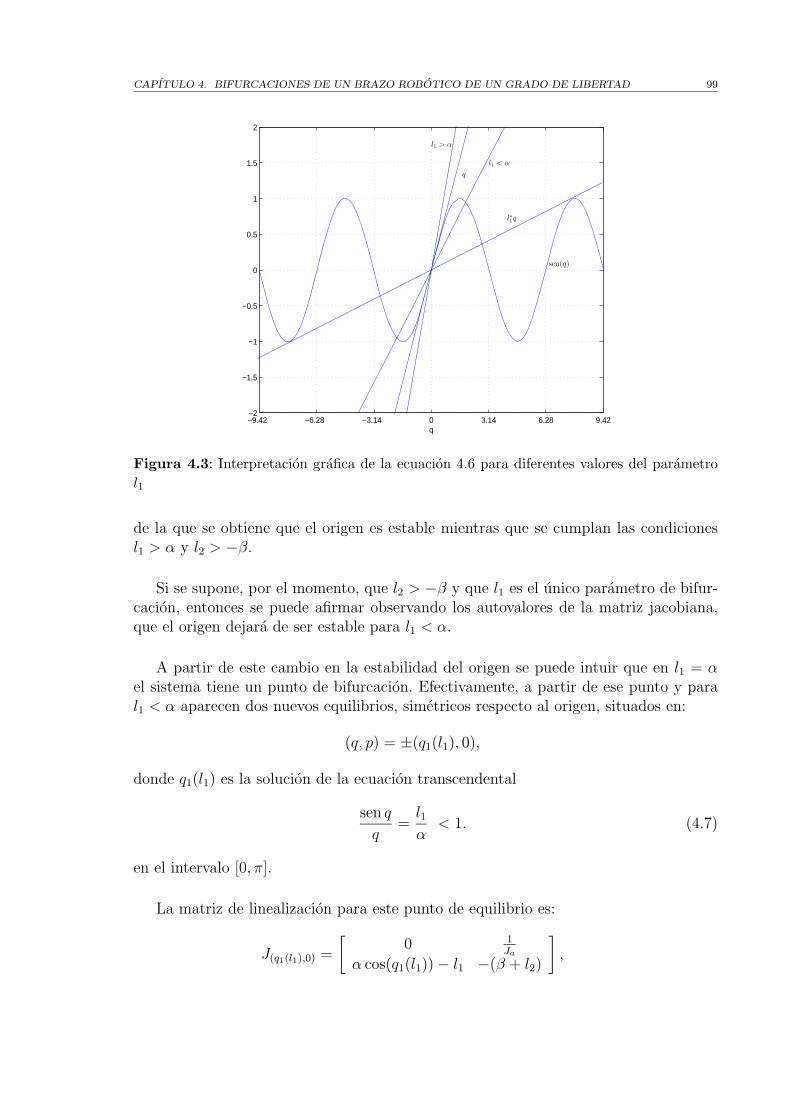
cuya resolucion grafica se muestra en la figura 4.3.
Evidentemente, el origen (q, p) = (0, 0) (posicion superior del pendulo) es siempreun punto de equilibrio y es unico mientras que se cumpla l1 ≥ α (figura. 4.3).
Si se disminuye paulatinamente el valor del parametro l1 partiendo de un valorl1 > α, se aprecia (figura 4.3) que al llegar a l1 = α aparecen dos nuevos pares deequilibrios simetricos respecto al origen.
Para valores de l1 aun mas bajos, van surgiendo nuevos pares simetricos, similaresa los anteriores, a medida que se continua disminuyendo l1.
Una vez determinado el numero de equilibrios del sistema, el siguiente paso para elanalisis de bifurcaciones es estudiar la estabilidad de los mismos en funcion del valor delos parametros de bifurcacion. Para ello se usara la correspondiente matriz jacobiana,particulizandola posteriormente en cada uno de los puntos de equilibrio.
J =
[0 1
Ja
α cos q − l1 −(β + l2)
].
En el punto de equilibrio en el origen, la matriz de linealizacion correspondiente es:
J(0,0) =
[0 1
Ja
α − l1 −(β + l2)
],
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 99
−9.42 −6.28 −3.14 0 3.14 6.28 9.42−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
q
l1 > α
q
l1 < α
l∗1q
sen(q)
Figura 4.3: Interpretacion grafica de la ecuacion 4.6 para diferentes valores del parametrol1
de la que se obtiene que el origen es estable mientras que se cumplan las condicionesl1 > α y l2 > −β.
Si se supone, por el momento, que l2 > −β y que l1 es el unico parametro de bifur-cacion, entonces se puede afirmar observando los autovalores de la matriz jacobiana,que el origen dejara de ser estable para l1 < α.
A partir de este cambio en la estabilidad del origen se puede intuir que en l1 = αel sistema tiene un punto de bifurcacion. Efectivamente, a partir de ese punto y paral1 < α aparecen dos nuevos equilibrios, simetricos respecto al origen, situados en:
(q, p) = ±(q1(l1), 0),
donde q1(l1) es la solucion de la ecuacion transcendental
sen q
q=
l1α
< 1. (4.7)
en el intervalo [0, π].
La matriz de linealizacion para este punto de equilibrio es:
J(q1(l1),0) =
[0 1
Ja
α cos(q1(l1)) − l1 −(β + l2)
],
100 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
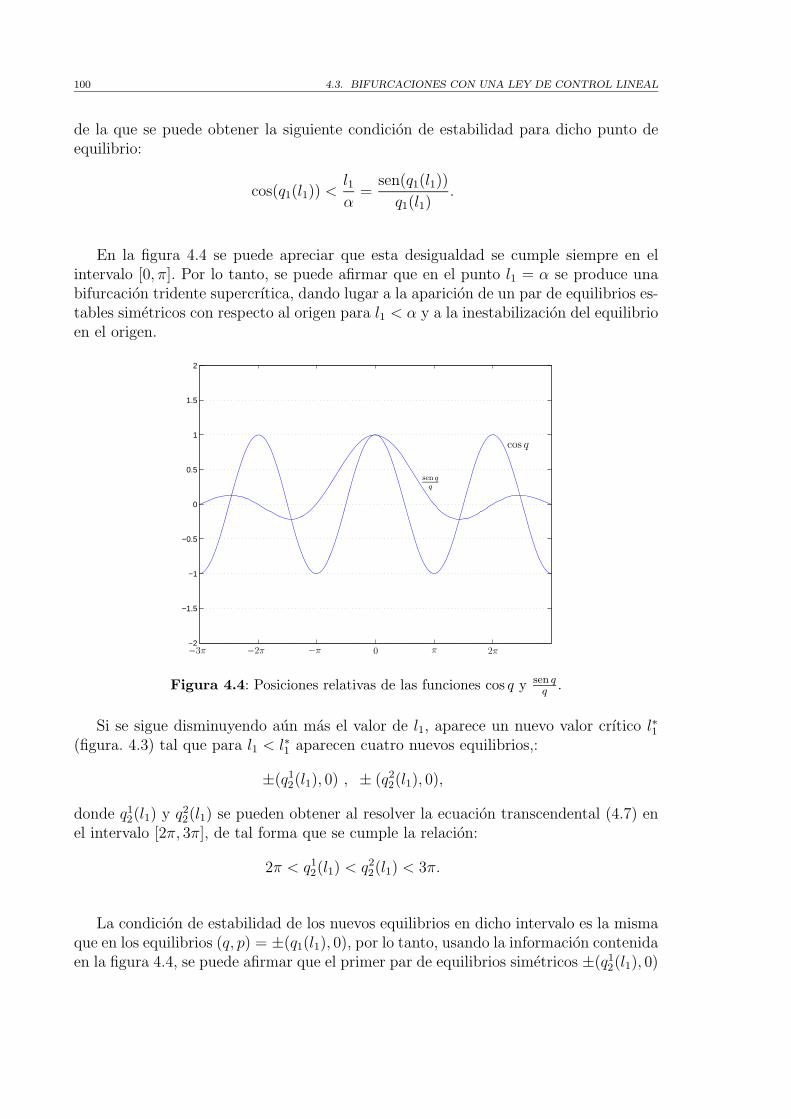
de la que se puede obtener la siguiente condicion de estabilidad para dicho punto deequilibrio:
cos(q1(l1)) <l1α
=sen(q1(l1))
q1(l1).
En la figura 4.4 se puede apreciar que esta desigualdad se cumple siempre en elintervalo [0, π]. Por lo tanto, se puede afirmar que en el punto l1 = α se produce unabifurcacion tridente supercrıtica, dando lugar a la aparicion de un par de equilibrios es-tables simetricos con respecto al origen para l1 < α y a la inestabilizacion del equilibrioen el origen.
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
sen qq
cos q
−3π −2π −π 0 π 2π
Figura 4.4: Posiciones relativas de las funciones cos q y sen qq .
Si se sigue disminuyendo aun mas el valor de l1, aparece un nuevo valor crıtico l∗1(figura. 4.3) tal que para l1 < l∗1 aparecen cuatro nuevos equilibrios,:
±(q12(l1), 0) , ± (q2
2(l1), 0),
donde q12(l1) y q2
2(l1) se pueden obtener al resolver la ecuacion transcendental (4.7) enel intervalo [2π, 3π], de tal forma que se cumple la relacion:
2π < q12(l1) < q2
2(l1) < 3π.
La condicion de estabilidad de los nuevos equilibrios en dicho intervalo es la mismaque en los equilibrios (q, p) = ±(q1(l1), 0), por lo tanto, usando la informacion contenidaen la figura 4.4, se puede afirmar que el primer par de equilibrios simetricos ±(q1
2(l1), 0)
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 101
es inestable, mientras que el segundo par ±(q22(l1), 0) es estable. Este fenomeno se
corresponde con una doble bifurcacion silla-nodo de equilibrios en l1 = l∗1.
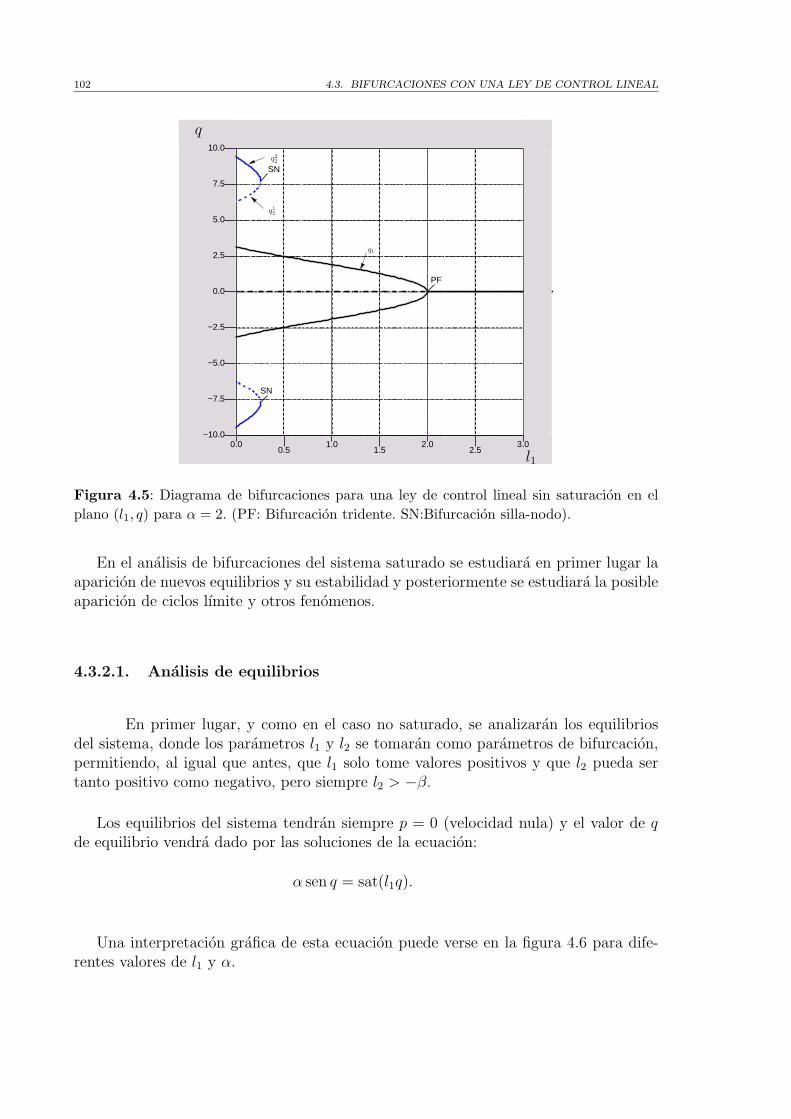
El diagrama de bifurcaciones correspondiente a este sistema se recoge en la figura4.5, donde se representa la evolucion de los equilibrios en q en funcion del parametrol1, indicandose con SN los puntos de bifurcacion silla-nodo de equilibrios y con PF labifurcacion tridente.
En efecto, en la figura 4.5 se aprecia como, para valores de l1 superiores a α, existeun unico equilibrio estable en q = 0 (posicion vertical).
Si se disminuye el valor de l1 por debajo de α aparecen dos nuevos equilibrios estables±(q1(l1), 0) y se inestabiliza la posicion vertical al producirse una bifurcacion tridente(PF). Si se sigue disminuyendo el valor de l1 se observa como para l1 < l∗1 surgen cuatronuevos equilibrios en ±(q1
2(l1), 0) y ±(q22(l1), 0): los dos primeros inestables y los otros
dos estables en una doble bifurcacion silla-nodo (SN).
En realidad, si se continua disminuyendo el valor de l1 aparecera una sucesion devalores crıticos decrecientes correspondientes a bifurcaciones silla-nodo de equilibriossimilar a la anterior, que no seran estudiadas por tener el mismo caracter que las yaestudiadas.
En este apartado se ha supuesto que l2 > −β, tomandose como unico parametro debifurcacion l1. El parametro l2 no interviene en el numero de equilibrios, aunque sı lohace en su estabilidad, esto esta asociado a bifurcaciones que conllevan la aparicionde ciclos lımite. Las bifurcaciones de este tipo, aunque estan presentes, no se trataranaquı en el caso sin saturacion, y se trataran en el siguiente apartado, correspondienteal caso con saturacion.
4.3.2. Sistema con ley de control lineal saturada
En este apartado se estudiara el comportamiento del sistema con una ley decontrol lineal como la del apartado anterior pero teniendo en cuenta una saturacion enel actuador. Como ya se ha comentado con anterioridad, por simplicidad y sin perdidade generalidad, se supondra una saturacion normalizada (figura. 4.2).
Por tanto, la ley de control sera u = sat(−l1q − l2p) y las ecuaciones del sistemacontrolado, correspondientes a un sistema hamiltoniano con saturacion, seran:
q =p
Ja
p = α sen q − βp − sat(l1q + l2p).
102 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
PF
SN
SN
0.00.5
1.01.5
2.02.5
3.0
10.0
7.5
5.0
2.5
0.0
−2.5
−5.0
−7.5
−10.0
l1
q
q1
q12
q22
Figura 4.5: Diagrama de bifurcaciones para una ley de control lineal sin saturacion en elplano (l1, q) para α = 2. (PF: Bifurcacion tridente. SN:Bifurcacion silla-nodo).
En el analisis de bifurcaciones del sistema saturado se estudiara en primer lugar laaparicion de nuevos equilibrios y su estabilidad y posteriormente se estudiara la posibleaparicion de ciclos lımite y otros fenomenos.
4.3.2.1. Analisis de equilibrios
En primer lugar, y como en el caso no saturado, se analizaran los equilibriosdel sistema, donde los parametros l1 y l2 se tomaran como parametros de bifurcacion,permitiendo, al igual que antes, que l1 solo tome valores positivos y que l2 pueda sertanto positivo como negativo, pero siempre l2 > −β.
Los equilibrios del sistema tendran siempre p = 0 (velocidad nula) y el valor de qde equilibrio vendra dado por las soluciones de la ecuacion:
α sen q = sat(l1q).
Una interpretacion grafica de esta ecuacion puede verse en la figura 4.6 para dife-rentes valores de l1 y α.
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 103
−3 −2 −1 0 1 2 3−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
−π2
π2q
sat(l1q)
α sen qα = 2
α = 1
α = 0,5
l1 = 3
l1 = 1
l1 = 0,4
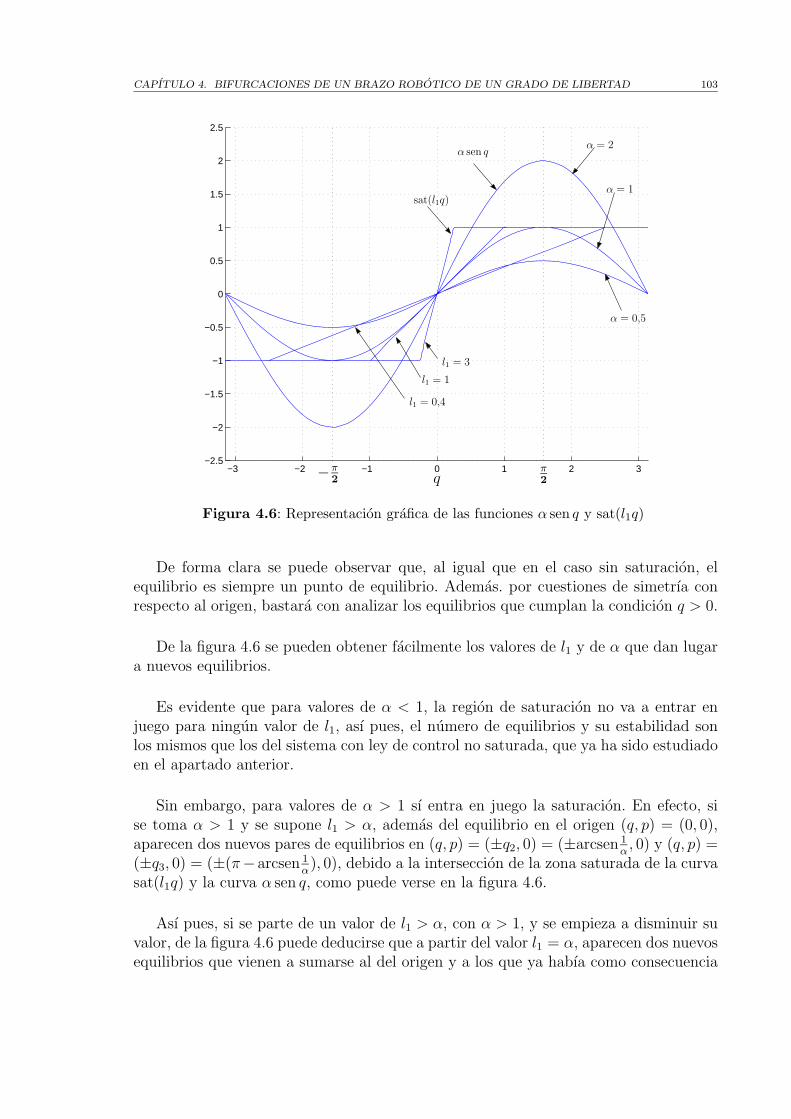
Figura 4.6: Representacion grafica de las funciones α sen q y sat(l1q)
De forma clara se puede observar que, al igual que en el caso sin saturacion, elequilibrio es siempre un punto de equilibrio. Ademas. por cuestiones de simetrıa conrespecto al origen, bastara con analizar los equilibrios que cumplan la condicion q > 0.
De la figura 4.6 se pueden obtener facilmente los valores de l1 y de α que dan lugara nuevos equilibrios.
Es evidente que para valores de α < 1, la region de saturacion no va a entrar enjuego para ningun valor de l1, ası pues, el numero de equilibrios y su estabilidad sonlos mismos que los del sistema con ley de control no saturada, que ya ha sido estudiadoen el apartado anterior.
Sin embargo, para valores de α > 1 sı entra en juego la saturacion. En efecto, sise toma α > 1 y se supone l1 > α, ademas del equilibrio en el origen (q, p) = (0, 0),aparecen dos nuevos pares de equilibrios en (q, p) = (±q2, 0) = (±arcsen 1
α, 0) y (q, p) =
(±q3, 0) = (±(π−arcsen 1α), 0), debido a la interseccion de la zona saturada de la curva
sat(l1q) y la curva α sen q, como puede verse en la figura 4.6.
Ası pues, si se parte de un valor de l1 > α, con α > 1, y se empieza a disminuir suvalor, de la figura 4.6 puede deducirse que a partir del valor l1 = α, aparecen dos nuevosequilibrios que vienen a sumarse al del origen y a los que ya habıa como consecuencia
104 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
de la saturacion. Estos dos nuevos equilibrios son los equivalentes a los que surgıan dela bifurcacion tridente en el caso sin saturacion y que estaban situados, para l1 < α en:
(q, p) = ±(q1(l1), 0),
donde q1(l1) es la solucion de la ecuacion transcendental
sen q
q=
l1α
< 1.
en el intervalo [0, π].
Si se continua disminuyendo el valor de l1, llega un momento en que los equilibrios±(q1(l1), 0) y (±arcsen 1
α, 0) se unen y desaparecen, dando lugar a una bifurcacion silla-
nodo de equilibrios para l1 = 1arcsen 1
α
.
Todo lo expuesto hasta ahora ha sido para los equilibrios que aparecen en el intervaloq ∈ [−π, π]. Si se observa lo que ocurre fuera de ese intervalo es evidente que en α = 1existen infinitas bifurcaciones silla-nodo donde aparecen infinitos pares de equilibriosperiodicos en (q, p) = (±(q2 + 2kπ), 0) y (q, p) = (±(q3 + 2kπ), 0) con k = 1, 2, 3, . . ..
Pero, si se sigue disminuyendo l1 por debajo de l∗1 = π + arcsen 1α, estos equilibrios
variaran dejando de ser periodicos, comportandose de igual manera que en el caso nosaturado.
Una vez realizado el estudio del numero de puntos de equilibrio que existen enel sistema en funcion de los parametros de bifurcacion, el siguiente paso, dentro delanalisis que se esta llevando a cabo, consiste en estudiar la estabilidad de cada uno deellos para establecer ası el caracter de cada bifurcacion.
Al estudiar la estabilidad de los equilibrios se usara la correspondiente matriz jaco-biana, que para la parte no saturada del sistema es de la forma:
J =
[0 1
Ja
α cos q − l1 −(β + l2)
]
y en la zona de saturacion queda:
Jsat =
[0 1
Ja
α cos q −β
].
El origen es siempre un punto de equilibrio y estara en la parte lineal de la satura-cion, por lo que el jacobiano particularizado en el punto (q, p) = (0, 0) es:
J(0,0) =
[0 1
Ja
α − l1 −(β + l2)
]

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 105
del que se obtiene que, al igual que en el caso sin saturacion, el origen es establemientras que se cumpla la condicion l1 > α .
El valor l1 = α marca la frontera a partir de la cual, para valores de l1 < α, aparecendos nuevos puntos de equilibrio en (q, p) = ±(q1(l1), 0) y el origen se inestabiliza. Estospuntos de equilibrio no pertenecen a la zona saturada y su estabilidad ya ha sidodiscutida en el apartado anterior. En efecto, son puntos de equilibrio estables y por lotanto en l1 = α se produce una bifurcacion tridente supercrıtica al igual que en el casosin saturacion.
A continuacion pasa a estudiarse la estabilidad en los puntos de equilibrio queaparecen en la bifurcacion silla-nodo para α = 1 en (±q2, 0) y (±q3, 0), pertenecientes ala zona saturada. Por simplicidad y simetrıa solo se estudiaran los equilibrios positivos.
El primero de ellos es (q, p) = (q2, 0) = (arcsen 1α, 0), por lo que la matriz jacobiana
particularizada en dicho punto es:
J(q2,0) =
[0 1
Ja
α cos q2 −β
]=
[0 1
Ja√α2 − 1 −β
],
que tiene como autovalores
λ1,2 =−β ±
√β2 + 4
√α2−1Ja
2.
Dado que, para que existan estos equilibrios, ha de cumplirse la condicion α > 1,
se puede asegurar que, para esos valores de α, siempre se cumple β <√
β2 + 4√
α2−1Ja
.
Ası pues, se puede concluir que ambos autovalores seran reales y que uno de ellossera positivo, es decir, los equilibrios (q, p) = (±q2, 0) = (±arcsen 1
α, 0) son siempre
inestables.
El otro equilibrio aparecido en la bifurcacion silla-nodo se da para q3 = ((π −arcsen 1
α), 0) y su jacobiano correspondiente sera:
J(q3,0) =
[0 1
Ja
α cos q3 −β
]=
[0 1
Ja
−√α2 − 1 −β
],
por lo tanto los autovalores de la matriz jacobiana tienen la forma:
λ1,2 =−β ±
√β2 − 4
√α2−1Ja
2,
los cuales, dado que para α > 1 se cumple que β >√
β2 − 4√
α2−1Ja
, tendran siempre
parte real negativa, y por tanto, los equilibrios (q, p) = (±q3, 0) = (±(π − arcsen 1α), 0)
son siempre estables.

106 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
El resto de los equilibrios periodicos a estos ultimos que aparecen debido a lasinfinitas bifurcaciones silla-nodo antes mencionadas, tendran el mismo caracter que losestudiados.
Todo el analisis de bifurcaciones de equilibrios realizado hasta ahora puede resumirseen los correspondientes diagramas de bifurcaciones que se describen a continuacion.
SN
SN
0.000.60
1.201.80
2.403.00
10.00
6.67
3.33
0.00
−3.33
−6.67
−10.00
PF
q
l1
Figura 4.7: Diagrama de bifurcaciones de equilibrios del sistema controlado con una leylineal saturada en funcion de l1 para α > 1 (SN: Bifurcacion silla-nodo).
En la figura 4.7 se representa la variacion de los puntos de equilibrio en el intervalo[−3π, 3π] en funcion del parametro l1 para valores de α > 1. Pueden observarse lasbifurcaciones tridente y silla-nodo (antes mencionadas) ası como la evolucion de losequilibrios que aparecen debido a la saturacion ±(q2, 0) y ±(q3, 0). Estos equilibrios taly como se ha descrito con anterioridad permanecen constantes al ir disminuyendo elparametro l1, hasta que, a partir de un determinado valor, varıan de la misma formaen que lo hacıan en el caso sin saturacion.
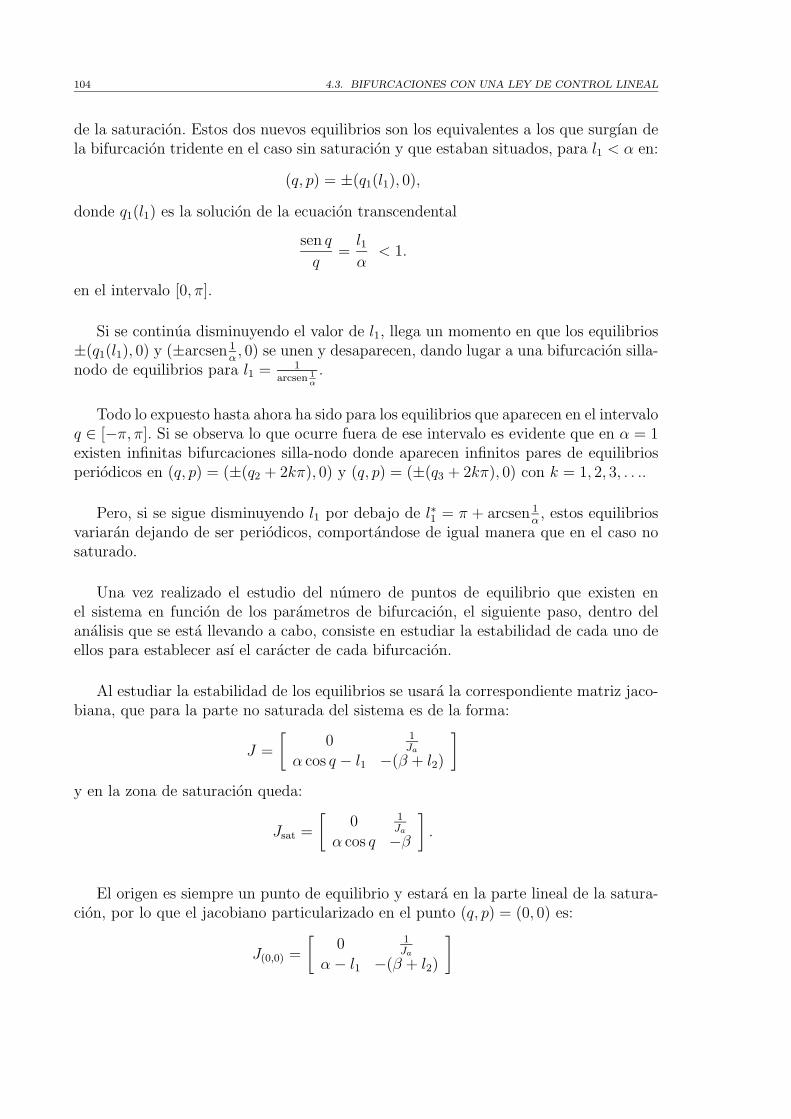
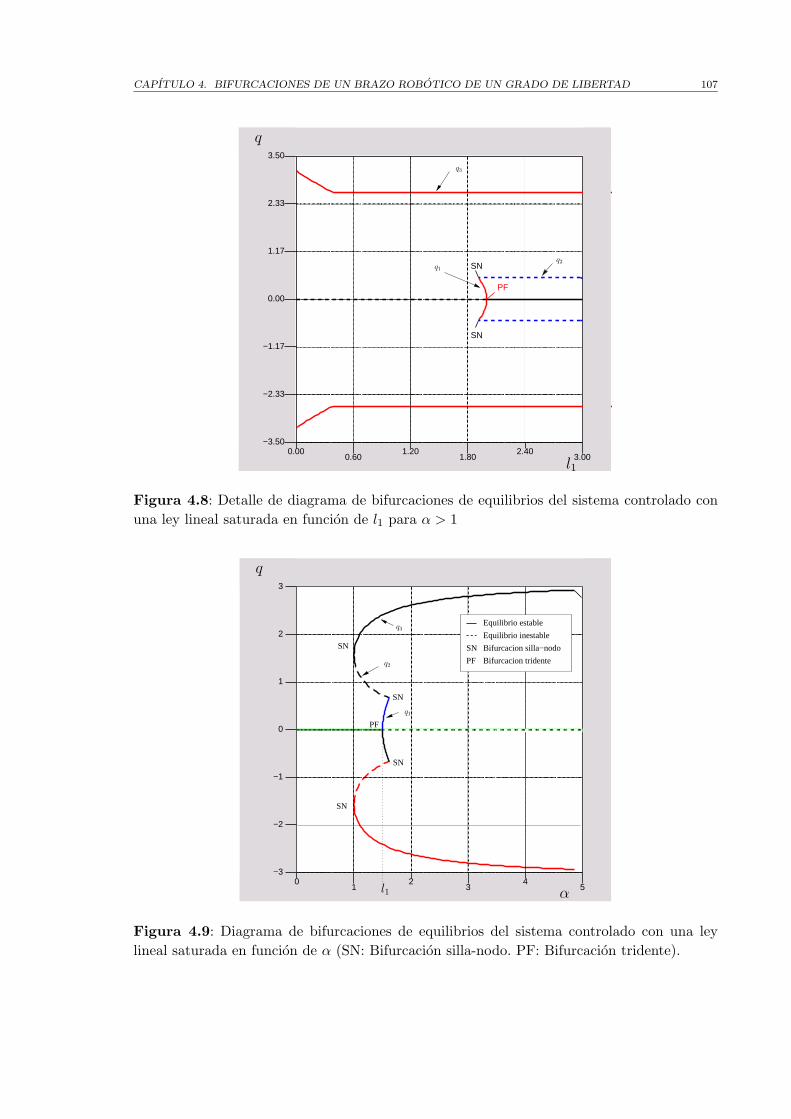
La figura 4.8 representa lo mismo que la anterior, pero en el intervalo [−π, π].
El diagrama de bifurcaciones de equilibrios del sistema en funcion del parametro αcon l1 = 1,5 se muestra en la figura 4.9. En ella puede observarse como para α < 1existe un solo equilibrio estable, y a partir de dicho valor se producen dos bifurcacio-nes silla-nodo simetricas (en realidad se producen infinitas, periodicas de periodo 2π),apareciendo cuatro nuevos equilibrios: dos estables y dos inestables.
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 107
PF
SN
SN
0.000.60
1.201.80
2.403.00
3.50
2.33
1.17
0.00
−1.17
−2.33
−3.50
q
l1
q1
q2
q3
Figura 4.8: Detalle de diagrama de bifurcaciones de equilibrios del sistema controlado conuna ley lineal saturada en funcion de l1 para α > 1
01
23
45
3
2
1
0
−1
−2
−3
SN
SN
SN
SN
PF
Equilibrio estable
SN
PF
Equilibrio inestable
Bifurcacion silla−nodo
Bifurcacion tridente
q
αl1
q1
q2
q3
Figura 4.9: Diagrama de bifurcaciones de equilibrios del sistema controlado con una leylineal saturada en funcion de α (SN: Bifurcacion silla-nodo. PF: Bifurcacion tridente).

108 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
5
3
3
3
7
11
SN
SN
PF0
PF0
l1 = αl1 = 1
arcsen 1α
α
l1
Figura 4.10: Conjunto de bifurcaciones de equilibrios del sistema controlado con una leylineal saturada en el plano (l1, α)
Si se sigue aumentando el valor del parametro en α = l1, se produce una bifurcaciontridente supercrıtica de la que nacen dos nuevos equilibrios estables y se inestabilizael del origen. Estos equilibrios evolucionaran al aumentar el parametro hasta coincidircon los inestables surgidos de la bifurcacion silla-nodo, desapareciendo ambos en unanueva bifurcacion silla-nodo de equilibrios.
En la figura 4.10 se muestra el conjunto de bifurcaciones en el plano (l1, α) en elintervalo q ∈ [−π, π]. Los numeros encerrados en un cırculo significan el numero deequilibrios que hay en cada zona. Se tienen las siguientes lıneas de bifurcacion:
i) La lınea l1 = α corresponde a una bifurcacion tridente supercrıtica del origen queda lugar a dos nuevos equilibrios para l1 < α.
ii) El segmento α = 1, l1 > 2π, corresponde a una bifurcacion silla-nodo de equilibrios,
en la que aparecen cuatro nuevos equilibrios.
iii) La curva l1 = 1arcsen 1
α
con α > 1, es una bifurcacion silla-nodo de equilibrios donde
desaparecen uno de los equilibrios de la bifurcacion tridente producida en (i) yotro de los de la bifurcacion silla-nodo de (ii).
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 109
4.3.2.2. Bifurcaciones asociadas a ciclos lımite
Hasta este momento se ha realizado el analisis de las bifurcaciones del sistemaasociadas a los equilibrios (numero y cambio de estabilidad), para lo que se ha supues-to que el parametro l2 no varıa y es siempre mayor que −β, quedando como unicoparametro de bifurcacion l1.
En este apartado se va a estudiar la influencia de la variacion de l2 en el compor-tamiento del sistema. Hay que destacar, tal y como se ha puesto de manifiesto en elapartado anterior, que la variacion del parametro l2 no interviene en el numero deequilibrios del sistema, aunque sı en su estabilidad.
Se estudiara a continuacion las bifurcaciones locales asociadas a la aparicion deciclos lımite alrededor de cada equilibrio, observando la evolucion de los autovaloresde la matriz jacobiana, particularizada en cada equilibrio, al variar los parametros debifurcacion l1 y l2.
Cuando un par de autovalores complejos conjugados de dicha matriz jacobiana cruceel eje imaginario se producira una bifurcacion de Hopf, con la consiguiente aparicionde una ciclo lımite y el cambio de estabilidad en el equilibrio en cuestion.
En primer lugar se realizara el estudio de las posibles bifurcaciones asociadas alequilibrio en el origen.
El Jacobiano particularizado en el punto (q, p) = (0, 0) es:
J(0,0) =
[0 1
Ja
α − l1 −(β + l2)
],
que tiene como autovalores:
λ1,2 =−(β + l2) ±
√(β + l2)2 + 4(α−l1)
Ja
2.
Analizando la evolucion de dichos autovalores en cada una de las zonas del plano(l1, l2), se puede conocer el comportamiento del sistema en cada una de ellas.
Para valores de l1 inferiores a α, λ1 y λ2 son autovalores reales independientementedel valor de l2, siendo uno de ellos siempre mayor que cero, por lo que, en este caso, elequilibrio en el origen es siempre inestable.
El caso en que l1 = α es un caso degenerado. Efectivamente, uno de los autovaloreses siempre igual a cero independientemente del valor de l2. En el punto l2 = −β el

110 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
otro autovalor es tambien igual a cero, lo que induce a pensar en la presencia de unabifurcacion de Takens-Bogdanov.
Si l2 > −β, se produce en este punto la bifurcacion tridente supercrıtica estudiadaen el analisis de equilibrios (el autovalor distinto de cero es negativo).
Por otra parte si l2 < −β, se produce en este punto una bifurcacion tridente dedistinto caracter que la anterior y que sera descrita posteriormente.
Por ultimo, para valores l1 > α, los autovalores de la matriz jacobiana particulari-zada en el punto de equilibrio en el origen, pueden ser complejos. Efectivamente, dadoque α− l1 < 0, los autovalores λ1,2 seran complejos conjugados si se cumple la relacion:
(β + l2)2 <
∣∣∣∣4(α − l1)
Ja
∣∣∣∣ . (4.8)
En el caso de l1 > α y para valores de l2 cercanos a −β, la desigualdad (4.8)sera siempre satisfecha, tal y como puede deducirse de la figura 4.11 donde se representa
la curva (β + l2)2 =
∣∣∣4(α−l1)Ja
∣∣∣ en el plano (l2, l1). La zona superior a la curva cumple la
desigualdad (4.8), por lo que es evidente que la relacion se cumple para l2 = −β, quesera el valor de bifurcacion a estudiar.
−4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 00
1
2
3
4
5
l 1
l2
−β
α
(β + l2)2 =
∣∣∣4(α−l1)Ja
∣∣∣
Figura 4.11: Curva (4.8) en el plano (l2, l1).
Si se analiza ahora el valor de los autovalores a ambos lados de la recta l2 = −β seobtiene que para l2 > −β los autovalores son complejos con parte real negativa por loque el equilibrio en el origen es estable en dicha zona.

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 111
Si l2 = −β, los autovalores asociados al punto de equilibrio en el origen son imagi-narios puros, lo que indica que el sistema presenta una variedad de centros alrededorde dicho punto de equilibrio, ya que el sistema pasa de ser disipativo a transformarseen conservativo. Observese que dicha variedad de centros es una variedad de centrosno lineal acotada, ya que al estar en presencia de una saturacion existe una orbita (lamas externa) que en su interior es un centro y en el exterior es un ciclo lımite establey que limita la variedad de centros antes mencionada, como puede verse en la figura4.12.
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
q
p
α = 0,5 l1 = 4l2 = −0,5β = 0,5
Figura 4.12: Plano de fases del sistema con l1 > α y l2 = −β.
Si se disminuye el valor de l2, hasta hacerlo inferior a −β, los autovalores pasaran atener parte real positiva, por lo que el origen, en este caso, sera un equilibrio inestablerodeado por un ciclo lımite estable que proviene de la orbita que limitaba a la variedadde centros para l2 = −β.
Por lo tanto en l2 = −β, para l1 > α, existe una bifurcacion de Hopf supercrıtica,al haber un par de autovalores complejos conjugados que cruzan el eje imaginario.
Una vez estudiado el equilibrio en el origen, se pasa a realizar un estudio similarcon el resto de los equilibrios hallados en el apartado 4.3.2.1.
En primer lugar se analizaran los equilibrios ±(q1(l1), 0) que aparecen como conse-cuencia de una bifurcacion tridente supercrıtica en el origen para l1 = α.
Estos equilibrios solo existen cuando l1 < α, por lo que, suponiendo que esto secumple, su estabilidad solo se vera afectada por la variacion del parametro l2.

112 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
El jacobiano particularizado en este punto de equilibrio es:
J(q1,0) =
[0 1
Ja
(α cos q1 − l1) −(β + l2)
].
Si se llama α1 = α cos q1, donde q1, como ya se ha indicado, es la solucion de laecuacion trascendental (4.7) en el intervalo [0, π], entonces los autovalores de la matrizJacobiana particularizada en dicho punto son:
λ1,2 =−(β + l2) ±
√(β + l2)2 + 4(α1−l1)
Ja
2.
Por otra parte, como se demostro en el caso sin saturacion, en el intervalo [0, π] secumple siempre que l1 > α cos q1, o lo que es lo mismo (α1 − l1) < 0.
Ası pues, el sistema puede tener autovalores complejos si se cumple la condicion:
(β + l2)2 <
∣∣∣∣4(α1 − l1)
Ja
∣∣∣∣ . (4.9)
Los autovalores en este equilibrio tienen parte real negativa para valores del parame-tro l2 > −β, por lo que en esta zona los equilibrios ±(q1(l1), 0) seran estables.
Por contra, para valores de l1 < −β, la parte real de los autovalores sera positiva ypor lo tanto los equilibrios para este valor de los parametros seran inestables.
En el caso particular en que l2 = −β, existen dos autovalores imaginarios puros,por lo que el sistema presenta una variedad de centros en torno a cada equilibrio, limi-tadas por dos orbitas correspondientes a una doble conexion homoclina en el equilibrioen el origen, estando todo ello rodeado por un ciclo lımite estable que existe comoconsecuencia de la saturacion, (figura 4.13).
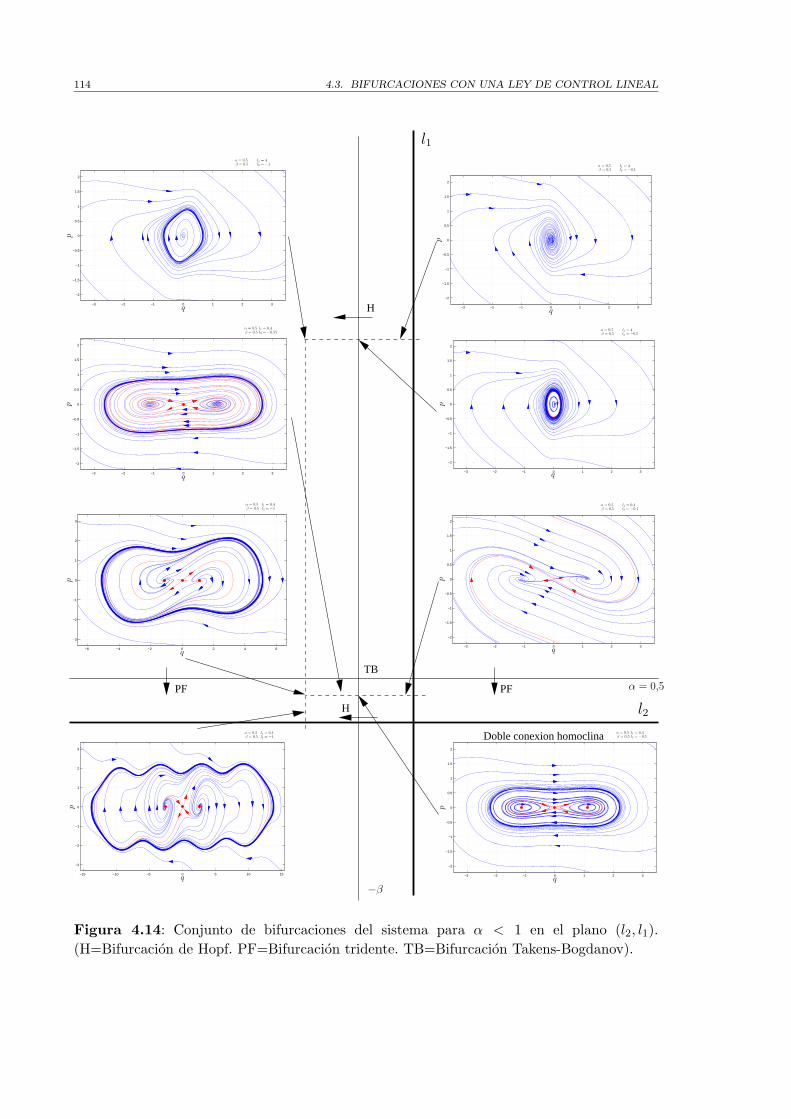
En la figura 4.14 se encuentra representado el conjunto de bifurcaciones del sistemacon saturacion en el plano (l2, l1) para α < 1, ası como el comportamiento dinamicodel sistema en cada una de las zonas estudiadas.
En dicha figura puede observarse como, para valores de l1 > α, el sistema presentaun unico equilibrio en el origen y como al desplazarse de la zona en que l2 > −β a lade l2 < −β, cruzando la recta l2 = −β se produce una bifurcacion de Hopf supercrıticaen torno al origen, inestabilizandose este y quedando alrededor de el un ciclo lımiteestable.

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 113
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
α = 0,5 l1 = 0,4l2 = −0,5β = 0,5
Figura 4.13: Plano de fases del sistema con l1 < α y l2 = −β.
Tambien estan representadas en la figura 4.14 las dos bifurcaciones tridente queexisten en el sistema, la tridente supercrıtica ya estudiada en l1 = α para l2 > −β y latridente mencionada en el analisis del equilibrio en el origen en l1 = α y l2 < −β. Enesta ultima bifurcacion el sistema pasa de tener un equilibrio inestable en el origen tipofoco rodeado por un ciclo lımite estable para l1 > α, a tener tres equilibrios inestables:un punto de silla en el origen y focos inestables en ±(q1, 0) rodeados los tres por unciclo lımite estable.
Para valores de l1 < α puede verse la doble conexion homoclina en el origen enl2 = −β, que hace cambiar la estabilidad de los equilibrios aparecidos en la bifurcaciontridente.
Por ultimo senalar que el punto l1 = α, l2 = −β es una bifurcacion de Takens-Bogdanov degenerada.
Para finalizar el analisis de bifurcaciones alrededor de los puntos de equilibrio, quedapor estudiar los equilibrios producidos por la saturacion en una bifurcacion silla-nodode equilibrios para α = 1 y que existen para α > 1.
Estos equilibrios son ±(q2, 0) = (±arcsen 1α, 0) y ±(q3, 0) = (±(π − arcsen 1
α), 0), y
los autovalores de la matriz jacobiana particularizada en cada un de ellos no dependendel parametro l1.
En efecto, se demostro en el apartado 4.3.2.1 que los equilibrios ±(q2, 0) son siempreinestables, mientras que los ±(q3, 0) son siempre estables, independientemente del valorde los parametros l1 y l2.
114 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−6 −4 −2 0 2 4 6
−3
−2
−1
0
1
2
3
−15 −10 −5 0 5 10 15
−3
−2
−1
0
1
2
3
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−3 −2 −1 0 1 2 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
PFPF
Doble conexion homoclina
TB
H
H q
q
pp
q
q
q
q
ppp
pp
p
α = 0,5
α = 0,5
α = 0,5
α = 0,5α = 0,5
α = 0,5
α = 0,5
α = 0,5
l1 = 0,4
l1 = 0,4
l1 = 0,4
l1 = 0,4
l2 = −0,5
l2 = −0,5
β = 0,5
β = 0,5
β = 0,5
β = 0,5β = 0,5
β = 0,5
β = 0,5
β = 0,5 l1 = 4
l1 = 4
l1 = 4
l1 = 0,1
l2 = −0,1
l2 = −0,1
l2 = −1
l2 = −1
l2 = −1
l2 = −0,55
l2
l1
α = 0,5
−β
Figura 4.14: Conjunto de bifurcaciones del sistema para α < 1 en el plano (l2, l1).(H=Bifurcacion de Hopf. PF=Bifurcacion tridente. TB=Bifurcacion Takens-Bogdanov).

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 115
D
I
H
1.4
ABC2.5
1.98
1.95
1.91
1.8
−0.1−0.4−0.6
1.5
J
EK G
L
F
HCHET
TBPF
SNSN
H+DCH
PF
l2
l1
α = 2
−β = −0,5
Figura 4.15: Conjunto de bifurcaciones del sistema para α > 1 en el plano (l2, l1).(SN=Bifurcacion silla-nodo de equilibrios. PF=Bifurcacion tridente. H=Bifurcacion de Hopf.DCH=Doble conexion homoclina. CHET=Conexion heteroclina).
116 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
−3 −2 −1 0 1 2 3
−4
−3
−2
−1
0
1
2
3
4
q
p
α = 2β = 0,5
l1 = 4l2 = −0,1
Figura ©a .
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
qp
α = 2l2 = −0,5β = 0,5l1 = 4
Figura ©b .
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
q
p
α = 2l2 = −0,7β = 0,5l1 = 4
Figura ©c .
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
q
p
α = 2β = 0,5
l1 = 4l2 = −1
Figura ©d .
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
q
p
α = 2 l1 = 1,95β = 0,5 l2 = −0,1
Figura ©e .
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
q
p
α = 2 l1 = 1,8β = 0,5 l2 = −0,1
Figura ©f .
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 117
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
p
α = 2 l1 = 1,95l2 = −0,4β = 0,5
Figura ©g .
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
p
α = 2 l1 = 1,95l2 = −0,5β = 0,5
Figura ©h .
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
q
p
α = 2 l1 = 1,95l2 = −0,5β = 0,5
Detalle de la figura ©h .
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
pα = 2 l1 = 1,98
l2 = −0,5β = 0,5
Figura ©i .
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
q
p
α = 2 l1 = 1,98l2 = −0,5β = 0,5
Detalle de la figura ©i .
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
p
α = 2 l1 = 2l2 = −0,5β = 0,5
Figura ©j .

118 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
p
α = 2 l1 = 1,95l2 = −0,6β = 0,5
Figura ©k .
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
q
p
α = 2 l1 = 1,5l2 = −0,6β = 0,5
Figura ©l .
Ası pues, en al figura 4.15 se encuentra representado el conjunto de bifurcaciones delsistema en funcion de la variacion de los parametros de bifurcacion l1 y l2, suponiendoque α > 1, es decir, que la saturacion de la ley de control entra en juego.
En efecto, si se observa dicha figura, pueden verse las distintas bifurcaciones exis-tentes en el sistema, ası como el comportamiento del mismo en las distintas regionesdelimitadas por dichas bifurcaciones.
A continuacion se pasa a comentar la figura 4.15 a partir de los cambios cualitativosen el comportamiento del sistema al pasar de una region a otra.
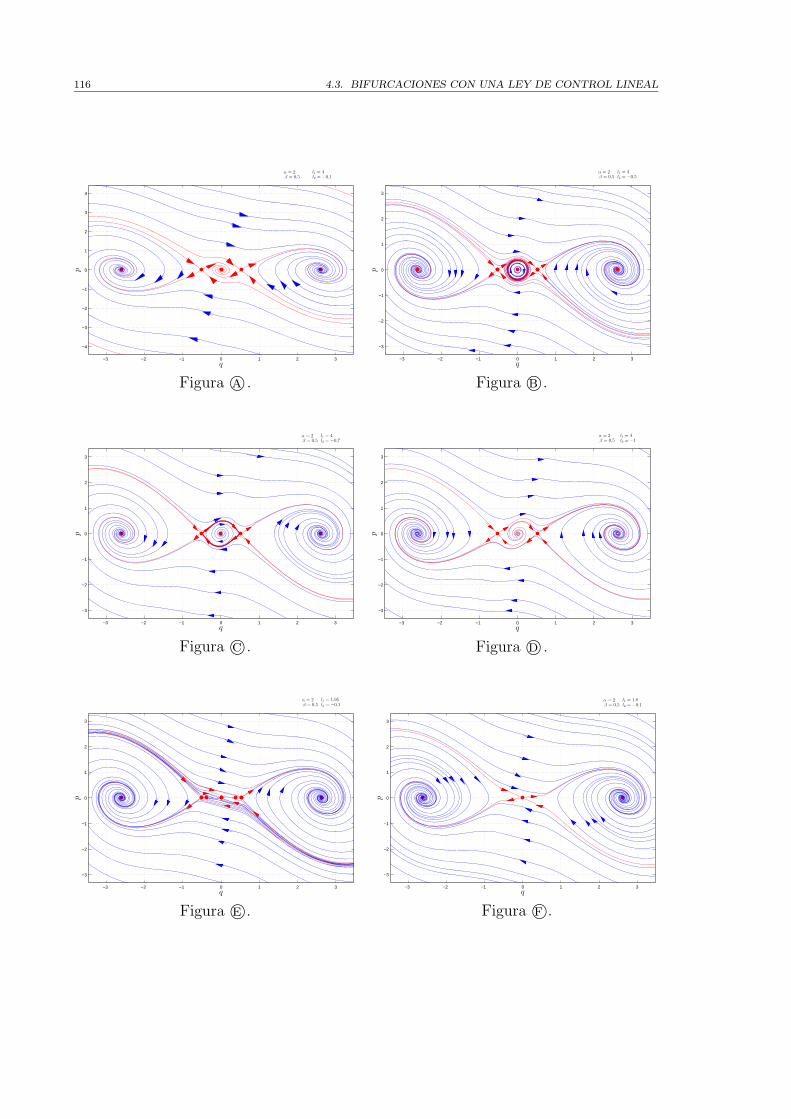
En primer lugar se parte de la region el la que l1 > α y l2 > −β, caracterizadapor la figura ©a, en la que el sistema presenta cinco equilibrios: el del origen que esestable y dos pares de equilibrios ±(q2, 0) y ±(q3, 0) provenientes de la saturacion:siendo inestable tipo silla el par mas cercano al origen ±(q2, 0) y estable el otro par±(q3, 0).
Se comenzara por mantener el parametro l1 constante y superior a α y se variara elotro parametro l2 disminuyendolo, lo que, como ya se ha comentado con anterioridad,no modificara el numero de equilibrios aunque sı su estabilidad.
Al ir disminuyendo el parametro l2, cuando este llega al valor l2 = −β (figura ©b) seproduce una bifurcacion de Hopf supercrıtica y existe una variedad de centros alrededordel origen, limitados por un ciclo lımite estable en el exterior y centro en el interiorque proviene de dicha bifurcacion.
Al disminuir un poco mas l2 la variedad de centros desaparece quedando el sistemacon los mismos cinco equilibrios de la zona ©a en los que solo ha cambiado la estabilidaddel equilibrio en el origen, inestabilizandose y transformandose en un foco, quedandorodeado por un ciclo lımite estable.
CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 119
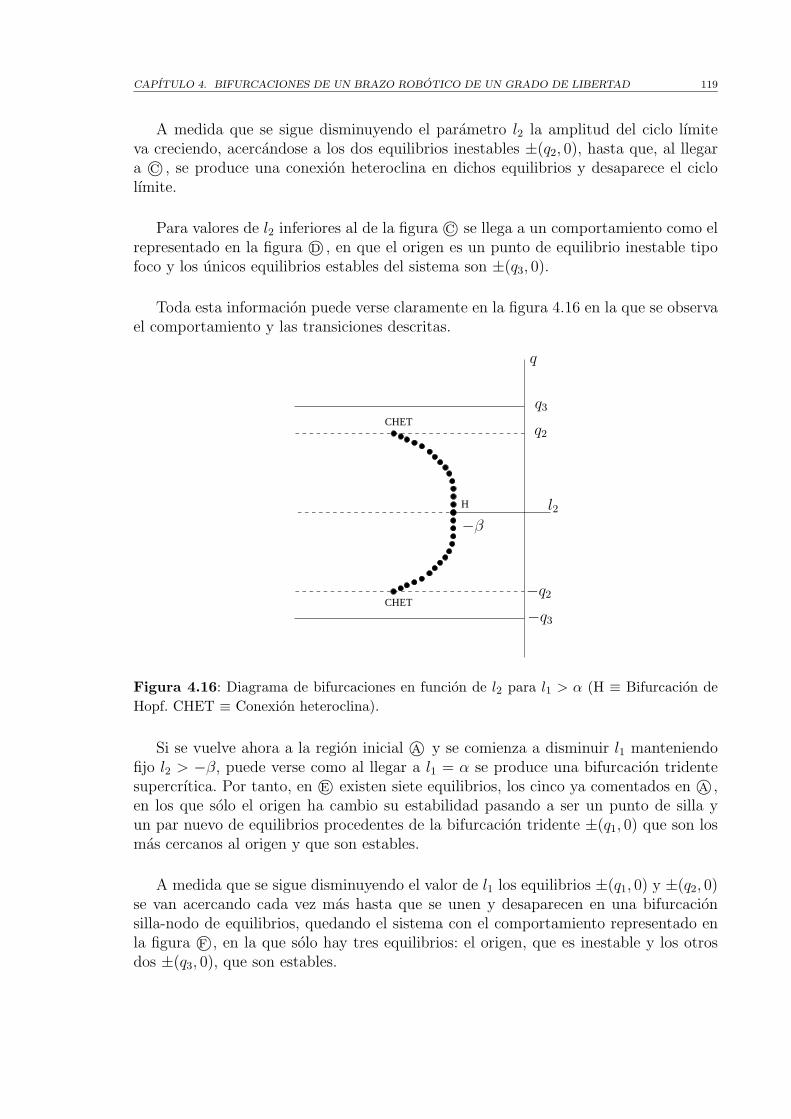
A medida que se sigue disminuyendo el parametro l2 la amplitud del ciclo lımiteva creciendo, acercandose a los dos equilibrios inestables ±(q2, 0), hasta que, al llegara ©c , se produce una conexion heteroclina en dichos equilibrios y desaparece el ciclolımite.
Para valores de l2 inferiores al de la figura ©c se llega a un comportamiento como elrepresentado en la figura ©d , en que el origen es un punto de equilibrio inestable tipofoco y los unicos equilibrios estables del sistema son ±(q3, 0).
Toda esta informacion puede verse claramente en la figura 4.16 en la que se observael comportamiento y las transiciones descritas.
CHET
CHET
H l2−β
q3
q2
−q3
−q2
q
Figura 4.16: Diagrama de bifurcaciones en funcion de l2 para l1 > α (H ≡ Bifurcacion deHopf. CHET ≡ Conexion heteroclina).
Si se vuelve ahora a la region inicial ©a y se comienza a disminuir l1 manteniendofijo l2 > −β, puede verse como al llegar a l1 = α se produce una bifurcacion tridentesupercrıtica. Por tanto, en ©e existen siete equilibrios, los cinco ya comentados en ©a ,en los que solo el origen ha cambio su estabilidad pasando a ser un punto de silla yun par nuevo de equilibrios procedentes de la bifurcacion tridente ±(q1, 0) que son losmas cercanos al origen y que son estables.
A medida que se sigue disminuyendo el valor de l1 los equilibrios ±(q1, 0) y ±(q2, 0)se van acercando cada vez mas hasta que se unen y desaparecen en una bifurcacionsilla-nodo de equilibrios, quedando el sistema con el comportamiento representado enla figura ©f , en la que solo hay tres equilibrios: el origen, que es inestable y los otrosdos ±(q3, 0), que son estables.

120 4.3. BIFURCACIONES CON UNA LEY DE CONTROL LINEAL
Este comportamiento ya fue estudiado en el apartado 4.3.2.1 y descrito en el dia-grama de bifurcaciones de la figura 4.8.
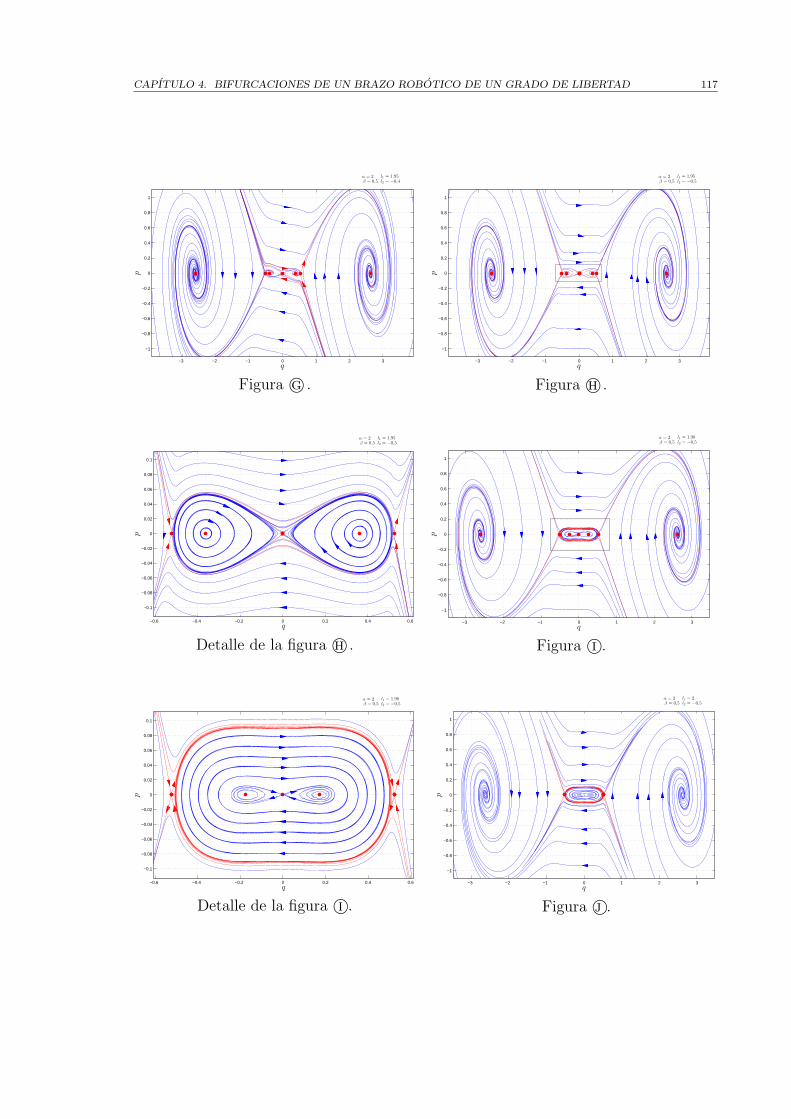
Por ultimo se pasa a comentar los fenomenos que ocurren en el sistema al disminuirel parametro l2 con l1 < α, pero sin que se haya producido aun la bifurcacion silla-nodo.Es decir, se parte de un comportamiento dinamico del sistema como el de la figura ©gque es el mismo que el de la ©e .
Si se parte de ©g y se comienza a disminuir l2, cuando se llega a l2 = −β se produceun comportamiento degenerado en el que coexisten dos variedades de centros alrededorde ±(q1, 0) englobadas por dos ciclos lımite estables en su exterior y centro en su interior(figura ©h ).
Si se disminuye aun mas el valor de l2 hasta hacerlo inferior a −β se llega al com-portamiento descrito en los figura ©k , a traves de una bifurcacion de Hopf que dejados ciclos lımite estables y una doble bifurcacion homoclina entre estos ciclos lımite yel origen que hace que desaparezcan estos. En este caso el sistema sigue teniendo sieteequilibrios, siendo el par mas exterior ±(q3, 0) estables y el resto inestables (el origeny ±(q2, 0) tipo silla y ±(q1, 0) tipo foco).
Si ahora, partiendo de ©k , se disminuye l1, manteniendo constante l2, se produceuna doble bifurcacion silla-nodo en la que el par de equilibrios inestables tipo nodo±(q1, 0) se unen con el par tipo silla ±(q2, 0) y desaparecen, quedando el sistema condos equilibrios estables ±(q3, 0) y uno inestable tipo silla que es el origen (figura ©l ),con un comportamiento similar al de la figura ©f .
Para finalizar hay que hacer una mencion especial al comportamiento degeneradodel sistema en el caso particular en que l2 = −β y para valores de l1 proximos a α.Para l1 = α existe una bifurcacion de Takens-Bogdanov degenerada (figura ©j ).
Si se parte de este valor y se disminuye lentamente el parametro l1, para valores del1 muy proximos a α, aparecen los equilibrios provenientes de la bifurcacion tridentesupercrıtica que se produce en l1 = α. Este comportamiento se corresponde con laconfiguracion que se muestra en la figura ©i , donde existen siete equilibrios: los dos masexteriores ±(q3, 0) que son estables, el origen que es un punto de silla y los equilibrios±(q1, 0) provenientes de la bifurcacion tridente que presentan una variedad de centroslimitada por una doble conexion homoclina en el origen que se encuentra a su vezrodeada por una variedad de centros limitados por un ciclo lımite estable que no englobaa los equilibrios tipo silla restantes ±(q1, 0).
Si se sigue disminuyendo l1 el ciclo lımite se va acercando cada vez mas al origen y ala orbita homoclina, hasta que se une a el en una conexion homoclina, desapareciendodicha conexion y dividiendose el ciclo lımite en dos ciclos lımite estables, quedando

CAPITULO 4. BIFURCACIONES DE UN BRAZO ROBOTICO DE UN GRADO DE LIBERTAD 121
cada uno de ellos alrededor de los equilibrios ±(q1, 0) que siguen presentando la mismavariedad de centros (figura ©h ).
Disminuyendo aun mas l1 los equilibrios ±(q1, 0) y ±(q2, 0) siguen acercandose hastaque desaparecen en la doble bifurcacion silla-nodo de equilibrios.
4.4. Sistema con ley de control hamiltoniana
En esta seccion se va a proceder a realizar un analisis de bifurcaciones del siste-ma controlado mediante una ley de control calculada segun la metodologıa propuestaen el apendice A, de manera que el sistema en bucle cerrado ha de cumplir las condi-ciones necesarias para preservar la simetrıa y mantener el espacio de fases del sistemacontrolado como un cilindro S1 × R.
4.4.1. Determinacion de la ley de control
Como se ha indicado en el apartado 4.2, las ecuaciones que modelan el com-portamiento del sistema expresadas segun la formulacion de un sistema hamiltonianogeneralizado son
x = [J − R]∂H
∂x+ gu, (4.10)
donde
x =
[x1
x2
]=
[qp
]∈ S1 × R,
J =
[0 1
−1 0
],R =
[0 00 ρ
],g =
[01
],
y la funcion de Hamilton del sistema sin compensar es
H =1
2
p2
Ja︸︷︷︸T
+ α cos q︸ ︷︷ ︸V
, (4.11)
con α = mgl; T la energıa cinetica y V la potencial.
Se pretende, siguiendo los pasos dados en el apendice A, que la posicion verticalsuperior (0, 0) sea un equilibrio estable del sistema.