capitulo iii - personales.unican.espersonales.unican.es/sancibrr/asignaturas/cyddm/capiii2.pdf ·...
TRANSCRIPT
1
1
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Capitulo IIICapitulo IIICapitulo IIICapitulo III
MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis cinemlisis cinemlisis cinemlisis cinemáááático.tico.tico.tico.
2
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo IIItulo IIItulo IIItulo IIIAnAnAnAnáááálisis cinemlisis cinemlisis cinemlisis cinemáááático de mecanismostico de mecanismostico de mecanismostico de mecanismos
III.1III.1III.1III.1 AnAnAnAnáááálisis cinemlisis cinemlisis cinemlisis cinemáááático de mecanismos. Mtico de mecanismos. Mtico de mecanismos. Mtico de mecanismos. Méééétodos grtodos grtodos grtodos grááááficos.ficos.ficos.ficos.III.2III.2III.2III.2 MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis cinemlisis cinemlisis cinemlisis cinemáááático.tico.tico.tico.
1.1.1.1. IntroducciIntroducciIntroducciIntroduccióóóón.n.n.n.2.2.2.2. Mecanismo cuadrilMecanismo cuadrilMecanismo cuadrilMecanismo cuadriláááátero articulado.tero articulado.tero articulado.tero articulado.3.3.3.3. Mecanismo bielaMecanismo bielaMecanismo bielaMecanismo biela----manivela.manivela.manivela.manivela.4.4.4.4. Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.
III.3III.3III.3III.3 MMMMéééétodos numtodos numtodos numtodos numééééricos de anricos de anricos de anricos de anáááálisis cinemlisis cinemlisis cinemlisis cinemáááático.tico.tico.tico.

2
3
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo III: Tema 2tulo III: Tema 2tulo III: Tema 2tulo III: Tema 2MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis lisis lisis lisis
cinemcinemcinemcinemááááticoticoticotico1.1.1.1. IntroducciIntroducciIntroducciIntroduccióóóón.n.n.n.2.2.2.2. Mecanismo cuadrilMecanismo cuadrilMecanismo cuadrilMecanismo cuadriláááátero articulado.tero articulado.tero articulado.tero articulado.
1.1.1.1. Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóón.n.n.n.2.2.2.2. Problema de velocidades.Problema de velocidades.Problema de velocidades.Problema de velocidades.3.3.3.3. Problema de aceleraciProblema de aceleraciProblema de aceleraciProblema de aceleracióóóón.n.n.n.
3.3.3.3. Mecanismo bielaMecanismo bielaMecanismo bielaMecanismo biela----manivela.manivela.manivela.manivela.1.1.1.1. Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóón.n.n.n.2.2.2.2. Problema de velocidades.Problema de velocidades.Problema de velocidades.Problema de velocidades.3.3.3.3. Problema de aceleraciones.Problema de aceleraciones.Problema de aceleraciones.Problema de aceleraciones.
4.4.4.4. Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.
4
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo III: Tema 2tulo III: Tema 2tulo III: Tema 2tulo III: Tema 2MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis lisis lisis lisis
cinemcinemcinemcinemááááticoticoticotico
1.1.1.1. IntroducciIntroducciIntroducciIntroduccióóóón.n.n.n.

3
5
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
IntroducciIntroducciIntroducciIntroduccióóóónnnnLos métodos analíticos tratan de llegar a una expresión matemática de las variables cinemáticas de posición, velocidad y aceleración, en función de los parámetros que definen las dimensiones del mecanismo analizado y las variables cinemáticas de entrada.
Normalmente estos métodos se basan en tres tipos de enfoques matemáticos: trigonométrico, números complejos y análisis vectorial.En cualquiera de los casos se trata de plantear las denominadas ecuaciones de cierreecuaciones de cierreecuaciones de cierreecuaciones de cierre o ecuaciones de lazoecuaciones de lazoecuaciones de lazoecuaciones de lazo. Estas ecuaciones representan las restricciones del movimiento del mecanismo de forma matemática empleando cualquiera de los tres enfoques mencionados.
En este apartado se estudiará el método analítico de Raven, uno de los más utilizados, y que permite obtener con relativa facilidad las ecuaciones analíticas del mecanismo cuadrilátero articulado y biela-manivela.
6
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo III: Tema 2tulo III: Tema 2tulo III: Tema 2tulo III: Tema 2MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis lisis lisis lisis
cinemcinemcinemcinemááááticoticoticotico
2. Mecanismo cuadril2. Mecanismo cuadril2. Mecanismo cuadril2. Mecanismo cuadriláááátero articulado.tero articulado.tero articulado.tero articulado.1.1.1.1. Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóón.n.n.n.2.2.2.2. Problema de velocidades.Problema de velocidades.Problema de velocidades.Problema de velocidades.3.3.3.3. Problema de aceleraciProblema de aceleraciProblema de aceleraciProblema de aceleracióóóón.n.n.n.

4
7
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóónnnn
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
B
θ1
α2ω2
Para la determinación de la posición inicial se plantea la ecuación de cierre del mecanismo que tiene la siguiente expresión vectorial:
4321 rrrr ++=
43214321
θθθθ iiiierererer ++=
++=
++=
44332211
44332211 coscoscoscos
θθθθ
θθθθ
senrsenrsenrsenr
rrrr
Sistema algebraico que puede ser resuelto para obtener los valores de θ3y θ4 en función de los valores conocidos de θ1, θ2, r1, r2, r3 y r4. Se puede utilizar un método numérico para su resolución o métodos trigonométricos para la resolución de este tipo de ecuaciones.
Mecanismo cuadrilMecanismo cuadrilMecanismo cuadrilMecanismo cuadriláááátero articulado:tero articulado:tero articulado:tero articulado:
8
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóónnnn
AB
A0 B0θ2
θ3
θ4
rrrr1
rrrr2
rrrr3
rrrr4s
αβ
δ
φ
β
22122
21 cos2 θrrrrs −+=
φcos2 32
322
4 srrsr −+=3
23
224
2cos
sr
rsra
++−=φ
22 θβ senrsens = )( 22 θβ sens
rasen=
φδ senrsenr 34 = )(4
3 φδ senr
rasen=
Ahora podemos obtener los ángulos que definen las posiciones de las barras como,
βφθ −=3 )(º3604 δβθ +−=
Hay que tener en cuenta que las expresiones planteadas pueden variar
en función de la posición relativa de los elementos. Así por ejemplo, si el
ángulo θ2 es mayor que 180º o si se considera la solución cruzada frente
a la solución abierta.
Para obtener la posición inicial se puede emplear un procedimiento trigonométrico

5
9
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Para establecer la posición de un punto cualquiera sobre un eslabón cualquiera es necesario plantear formulación adicional. En el caso del elemento 2 se tendrá,
222 φθλ +=
En el caso del punto P3 y P4 sobre el elemento 3 y 4 respectivamente,
)(
)cos(cos
33322
33322
3
3
φθθ
φθθ
++=
++=
sengsenry
grx
p
p
)180(
)180cos(
444
4441
4
4
+−=
+−+=
φθ
φθ
sengy
grx
p
p
En esta expresión se ha considerado un signo (-) afectando al ángulo φ4 dado su sentido. Este signo puede ser positivo en otros casos.
Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóónnnn
333φθλ +=
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
B
α2
ω2
X
Y
P2
P3
P4φ2
φ4
φ3
hhhh2 =g2
g3
g4hhhh4
hhhh3
2
2 2 2
i
g e= =h gλ
( )( )
2
2
2 2 2 2 2
2 2 2 2 2
cos cos
sin sin
p
p
x g g
y g g
= = +
= = +
λ θ φ
λ θ φ
3
3 2 3
i
g e= +h rλ
4
4 1 4
i
g e= +h rλ
4 4 4 180= − +λ θ φ
10
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de velocidadesProblema de velocidadesProblema de velocidadesProblema de velocidades
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
Bα2
ω2
Para la determinación de las velocidades se considera de nuevo la ecuación de cierre,
43214321
θθθθ iiiierererer ++=
01432432 =−++ rererer
iii θθθ
Derivando con respecto al tiempo,
0432 44
33
22 =++ θθθ θθθ iii
edt
dire
dt
dire
dt
dir
0432443322 =++ θθθ ωωω iiieireireir
−=+
−=+
222444333
222444333
coscoscos θωθωθω
θωθωθω
rrr
senrsenrsenr
Sin pérdida de generalidad se puede considerar que el elemento fijo forma un ángulo θ1=0. Entonces, reordenando la ecuación queda como,
6
11
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de velocidadesProblema de velocidadesProblema de velocidadesProblema de velocidades
−=+
−=+
222444333
222444333
coscoscos θωθωθω
θωθωθω
rrr
senrsenrsenr
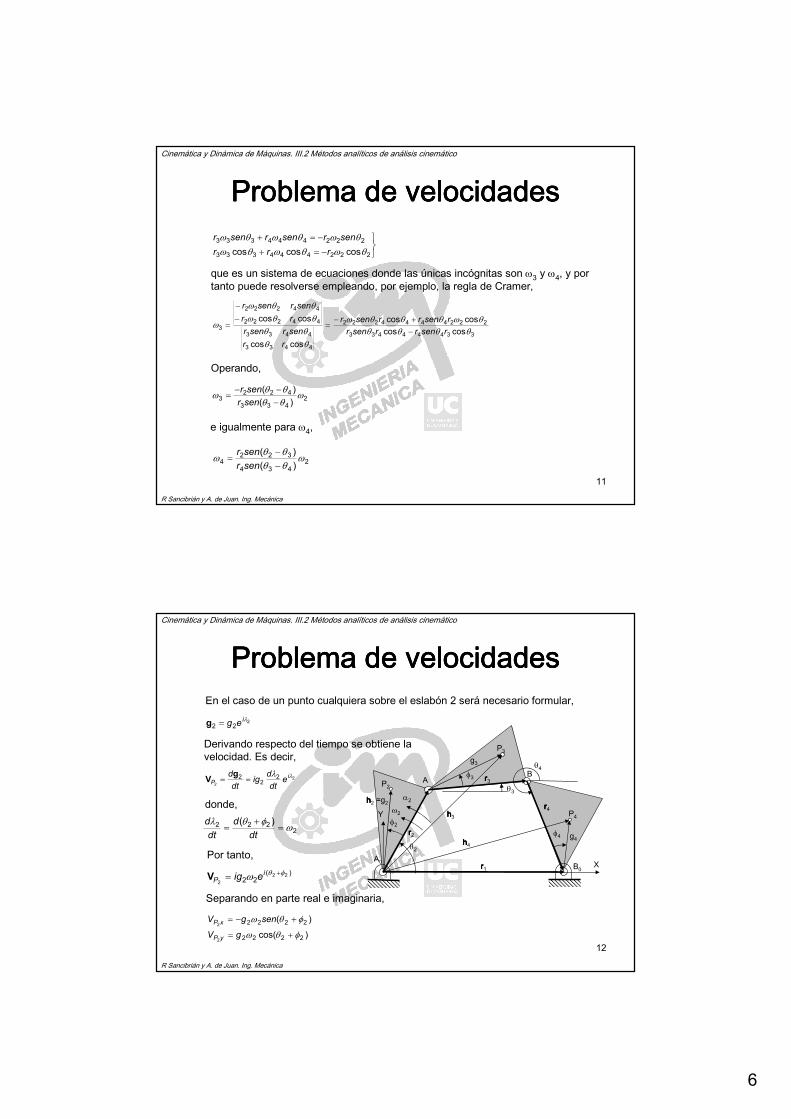
que es un sistema de ecuaciones donde las únicas incógnitas son ω3 y ω4, y por tanto puede resolverse empleando, por ejemplo, la regla de Cramer,
33444433
2224444222
4433
4433
44222
44222
3coscos
coscos
coscos
coscos
θθθθθωθθθω
θθθθθθωθθω
ωrsenrrsenr
rsenrrsenr
rr
senrsenr
rr
senrsenr
−+−
=−
−
=
Operando,
2433
4223
)(
)(ω
θθθθ
ω−−−
=senr
senr
e igualmente para ω4,
2434
3224
)(
)(ω
θθθθ
ω−−
=senr
senr
12
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de velocidadesProblema de velocidadesProblema de velocidadesProblema de velocidadesEn el caso de un punto cualquiera sobre el eslabón 2 será necesario formular,
222
λieg=g
Derivando respecto del tiempo se obtiene la velocidad. Es decir,
2
2
22
2 λλ iP e
dt
dig
dt
d==
gV
donde,
2222 )(
ωφθλ
=+
=dt
d
dt
d
Por tanto,)(
2222
2
φθω += iP eigV
Separando en parte real e imaginaria,
)cos(
)(
2222
2222
2
2
φθω
φθω
+=
+−=
gV
sengV
yP
xP
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
B
α2
ω2
X
Y
P2
P3
P4φ2
φ4
φ3
hhhh2 =g2
g3
g4hhhh4
hhhh3
7
13
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
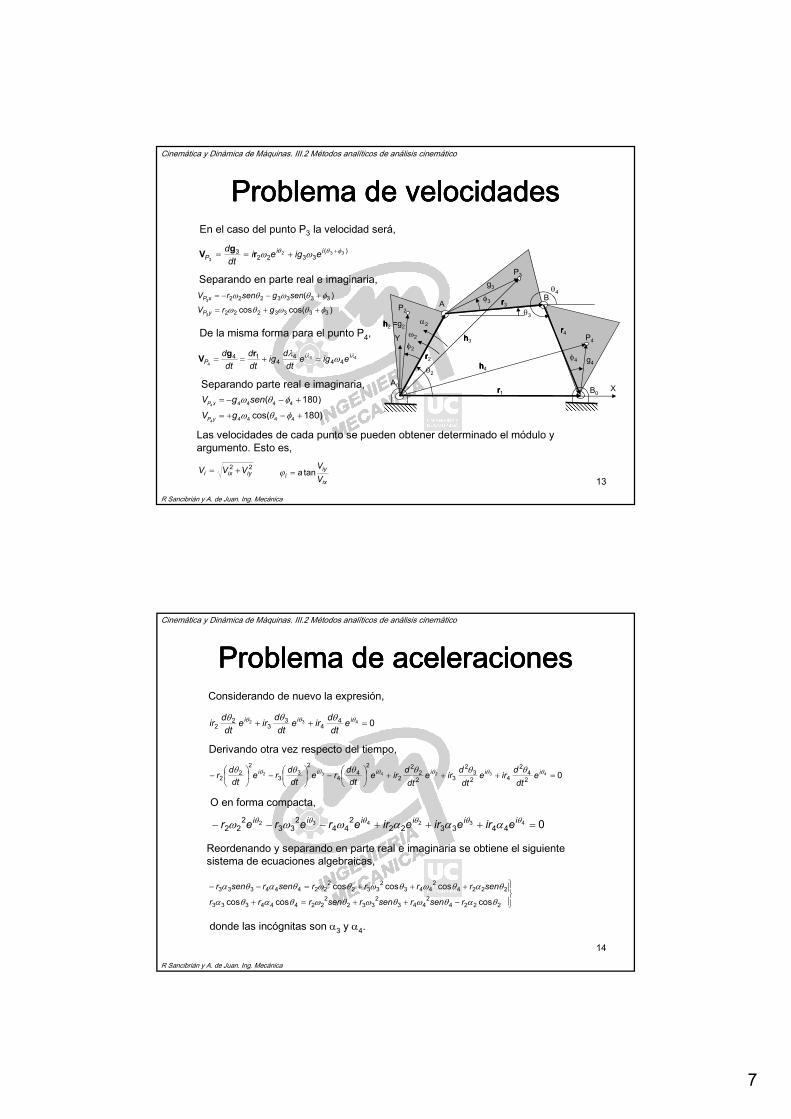
Problema de velocidadesProblema de velocidadesProblema de velocidadesProblema de velocidadesEn el caso del punto P3 la velocidad será,
)(3322
3 332
3
φθθ ωω ++== iiP eigei
dt
dr
gV
Separando en parte real e imaginaria,
)cos(cos
)(
3333222
3333222
3
3
φθωθω
φθωθω
++=
+−−=
grV
sengsenrV
yP
xP
De la misma forma para el punto P4,
44
4 444
414 λλ ω
λ iiP eige
dt
dig
dt
d
dt
d=+==
rgV
Separando parte real e imaginaria,
Las velocidades de cada punto se pueden obtener determinado el módulo y argumento. Esto es,
22iyixi VVV +=
ix
iyi
V
Va tan=ϕ
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1
A0
A
B0
B
α2
ω2
X
Y
P2
P3
P4φ2
φ4
φ3
hhhh2 =g2
g3
g4hhhh4
hhhh3
4
4
4 4 4 4
4 4 4 4
( 180)
cos( 180)
P x
P y
V g sen
V g
= − − +
= + − +
ω θ φ
ω θ φ
14
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesConsiderando de nuevo la expresión,
0432 44
33
22 =++ θθθ θθθ iii
edt
dire
dt
dire
dt
dir
Derivando otra vez respecto del tiempo,
0432432
24
2
423
2
322
2
2
2
44
2
33
2
22 =+++
−
−
− θθθθθθ θθθθθθ iiiiii
edt
dire
dt
dire
dt
dire
dt
dre
dt
dre
dt
dr
O en forma compacta,
0432432443322
244
233
222 =+++−−− θθθθθθ αααωωω iiiiii
eireireirererer
Reordenando y separando en parte real e imaginaria se obtiene el siguiente sistema de ecuaciones algebraicas,
−++=+
+++=−−
22242
4432
3322
22444333
22242
4432
3322
22444333
coscoscos
coscoscos
θαθωθωθωθαθα
θαθωθωθωθαθα
rsenrsenrsenrrr
senrrrrsenrsenr
donde las incógnitas son α3 y α4.
8
15
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesResolviendo por Cramer se obtiene,
2
32
343
24443
23342
222
433
4222
343
24443
23342
222
343
42222
44432
33422
22
343
4222422
44432
33422
22
343
4222422
44432
33422
22
33444433
22242
4432
3322
2244
33444433
4422242
4432
3322
22
4433
4433
4422242
4432
3322
22
4422242
4432
3322
22
3
)(
)cos()cos(
)(
)(
)(
)cos()cos(
)(
)()cos()cos(
)(
cos
)(
coscoscoscoscoscos
coscos
)cos(
coscos
cos)coscoscos(
coscos
coscos
coscoscos
ωωα
θθωθθωθθω
θθθθα
θθωθθωθθω
θθθθαωθθωθθω
θθθθαθωθθωθθω
θθθθαθωθθωθθω
θθθθθαθωθωθωθ
θθθθθθαθωθωθω
θθθθ
θθαθωθωθωθθαθωθωθω
α
+−
+−+−=
=−
−−
−
+−+−=
=−
−++−+−=
=−
−+++
+−
+++=
=+−
−+++
++−
+++=
=−−
−++
−+++
=
senr
rrr
senr
senr
senr
rrr
senr
senrrrr
senr
senrsenrsensenrsensenr
senr
senrrrr
rsenrrsenr
rsenrsenrsenrsenr
rsenrrsenr
rsenrrrr
rr
senrsenr
rrsenrsenrsenr
senrsenrrrr
16
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
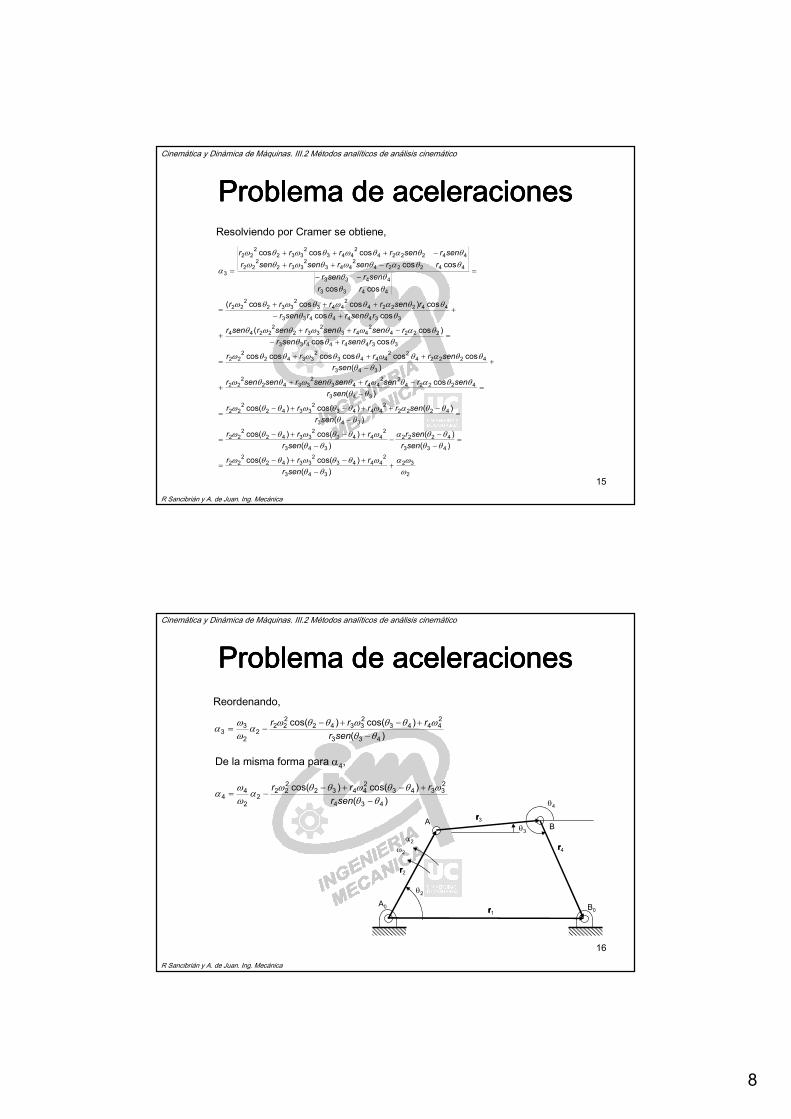
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesReordenando,
)(
)cos()cos(
433
24443
23342
222
22
33 θθ
ωθθωθθωα
ωω
α−
+−+−−=
senr
rrr
De la misma forma para α4,
)(
)cos()cos(
434
23343
24432
222
22
44 θθ
ωθθωθθωα
ωω
α−
+−+−−=
senr
rrr
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
Bα2
ω2
9
17
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
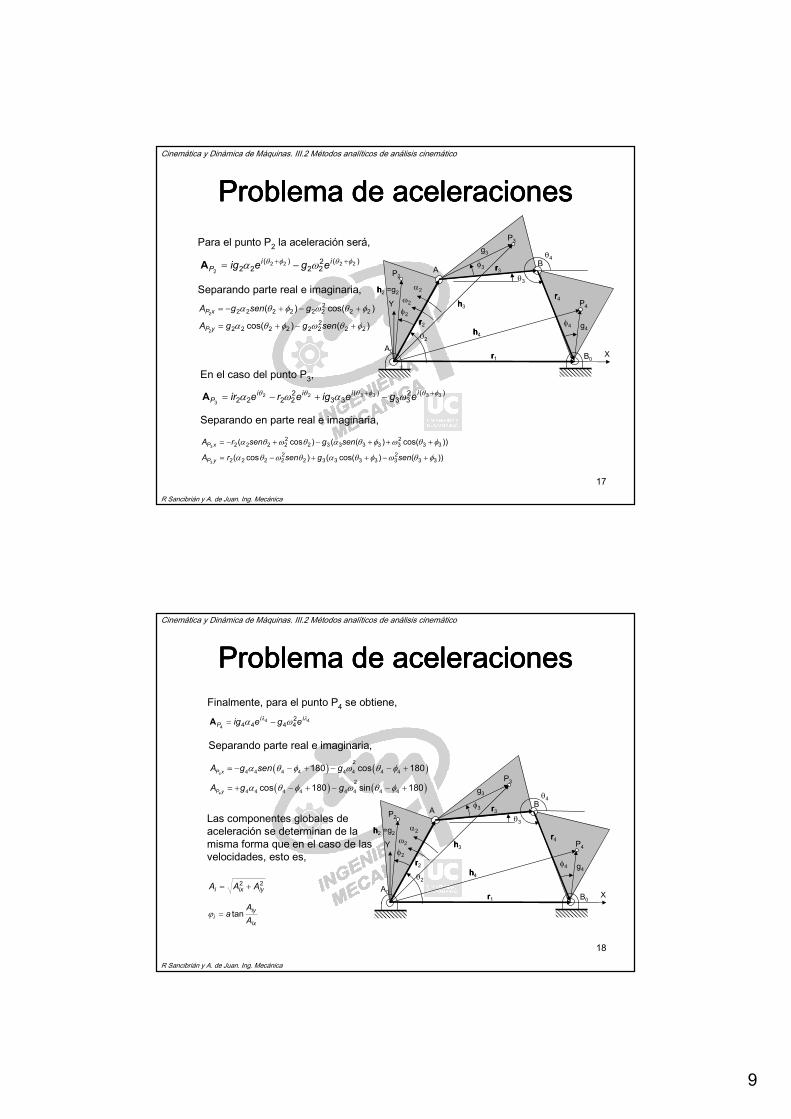
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesPara el punto P2 la aceleración será,
)(222
)(22
2222
2
φθφθ ωα ++ −= iiP egeigA
Separando parte real e imaginaria,
)()cos(
)cos()(
222222222
222222222
2
2
φθωφθα
φθωφθα
+−+=
+−+−=
senggA
gsengA
yP
xP
En el caso del punto P3,)(2
33)(
3322222
333322
3
φθφθθθ ωαωα ++ −+−= iiiiP egeigereirA
Separando en parte real e imaginaria,
))()cos(()cos(
))cos()(()cos(
332333332
22222
332333332
22222
3
3
φθωφθαθωθα
φθωφθαθωθα
+−++−=
+++−+−=
sengsenrA
sengsenrA
yP
xP
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
B
α2
ω2
X
Y
P2
P3
P4φ2
φ4
φ3
hhhh2 =g2
g3
g4hhhh4
hhhh3
18
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesFinalmente, para el punto P4 se obtiene,
44
4
24444
λλ ωα iiP egeig −=A
Separando parte real e imaginaria,
Las componentes globales de aceleración se determinan de la misma forma que en el caso de las velocidades, esto es,
22iyixi AAA +=
ix
iyi
A
Aa tan=ϕ
θ2
θ3
θ4
rrrr2
rrrr3
rrrr4
rrrr1A0
A
B0
B
α2
ω2
X
Y
P2
P3
P4φ2
φ4
φ3
hhhh2 =g2
g3
g4hhhh4
hhhh3
( ) ( )
( ) ( )4
4
2
4 4 4 4 4 4 4 4
2
4 4 4 4 4 4 4 4
180 cos 180
cos 180 sin 180
P x
P y
A g sen g
A g g
= − − + − − +
= + − + − − +
α θ φ ω θ φ
α θ φ ω θ φ
10
19
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo III: Tema 2tulo III: Tema 2tulo III: Tema 2tulo III: Tema 2MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis lisis lisis lisis
cinemcinemcinemcinemááááticoticoticotico
3.3.3.3. Mecanismo bielaMecanismo bielaMecanismo bielaMecanismo biela----manivela.manivela.manivela.manivela.1.1.1.1. Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóón.n.n.n.2.2.2.2. Problema de velocidades.Problema de velocidades.Problema de velocidades.Problema de velocidades.3.3.3.3. Problema de aceleraciones.Problema de aceleraciones.Problema de aceleraciones.Problema de aceleraciones.
20
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
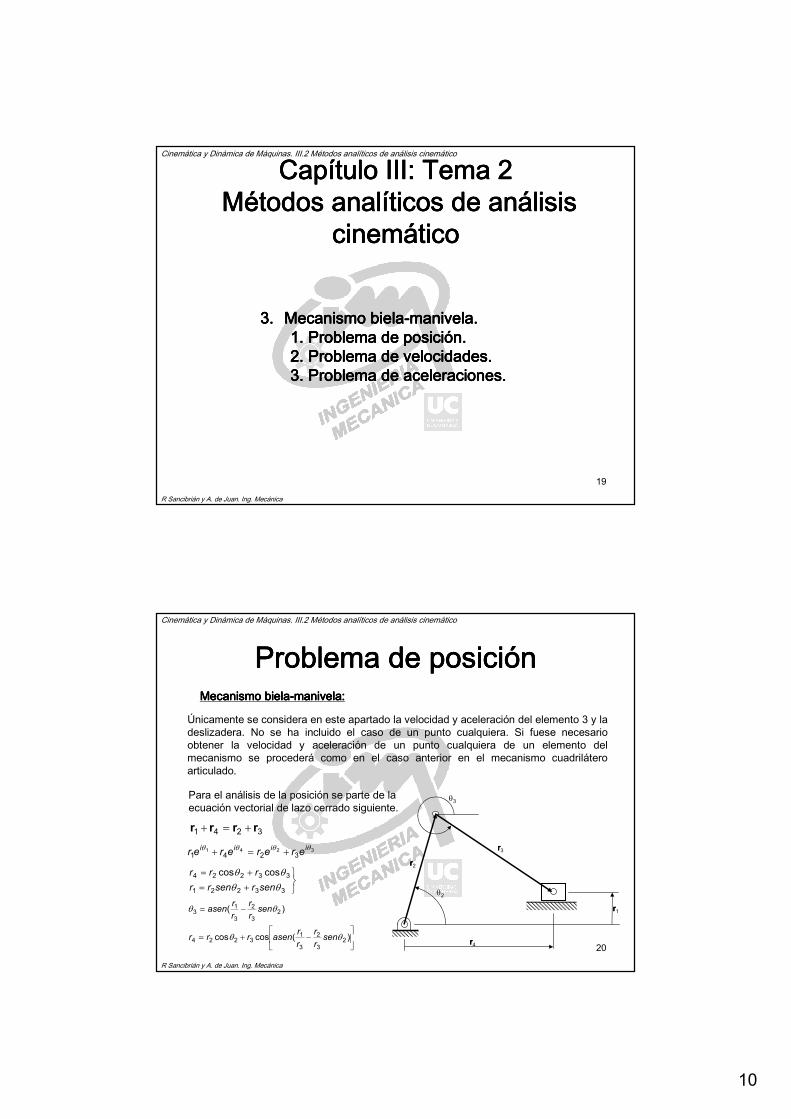
Problema de posiciProblema de posiciProblema de posiciProblema de posicióóóónnnnMecanismo bielaMecanismo bielaMecanismo bielaMecanismo biela----manivela:manivela:manivela:manivela:
rrrr4
rrrr1
rrrr2
rrrr3
θ2
θ3
Únicamente se considera en este apartado la velocidad y aceleración del elemento 3 y la deslizadera. No se ha incluido el caso de un punto cualquiera. Si fuese necesario obtener la velocidad y aceleración de un punto cualquiera de un elemento del mecanismo se procederá como en el caso anterior en el mecanismo cuadrilátero articulado.
Para el análisis de la posición se parte de la ecuación vectorial de lazo cerrado siguiente.
3241 rrrr +=+
32413241
θθθθ iiiierererer +=+
+=
+=
33221
33224 coscos
θθ
θθ
senrsenrr
rrr
−+=
−=
)(coscos
)(
23
2
3
13224
23
2
3
13
θθ
θθ
senr
r
r
rasenrrr
senr
r
r
rasen
11
21
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de velocidadesProblema de velocidadesProblema de velocidadesProblema de velocidadesPara la obtención de las velocidades se deriva la ecuación de lazo cerrado expresada en forma compleja respecto del tiempo. Es decir,
32433224
θθθ ωω iiieireireV +=
que separada en parte real e imaginaria produce el siguiente sistema de ecuaciones,
333222
3332224
coscos0 θωθω
θωθω
rr
senrsenrV
+=
−−=
Su resolución conduce a,
33
2223
cos
cos
θθω
ωr
r−=
32222224 tancos θθωθω rsenrV +−=
que son las velocidades del mecanismo en función de la velocidad de entrada.
22
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Problema de aceleracionesProblema de aceleracionesProblema de aceleracionesProblema de aceleracionesDe nuevo se toma la ecuación de lazo cerrado expresada en forma compleja y se
deriva esta vez dos veces respecto del tiempo obteniendo la siguiente expresión,33224
3323322
2224
θθθθθ αωαω iiiiieirereirereA +−+−=
Expresando es expresión compleja en forma algebraica produce,
+−+−=
−−−−=
33332332222
222
33332332222
2224
coscos0
coscos
θαθωθαθω
θαθωθαθω
rsenrrsenr
senrrsenrrA
que es un sistema lineal de dos ecuaciones con dos incógnitas cuya solución produce,
33
32332222
222
3cos
cos
θθωθαθω
αr
senrrsenr +−=
332332222
2223
2332222
2224 tan)cos(coscos θθωθαθωθωθαθω senrrsenrrsenrrA +−−−−−=
Con lo que queda resuelto el problema de aceleraciones.

12
23
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
CapCapCapCapíííítulo III: Tema 2tulo III: Tema 2tulo III: Tema 2tulo III: Tema 2MMMMéééétodos analtodos analtodos analtodos analííííticos de anticos de anticos de anticos de anáááálisis lisis lisis lisis
cinemcinemcinemcinemááááticoticoticotico
4.4.4.4. Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.Ejercicios propuestos.
24
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
Ejercicios propuestosEjercicios propuestosEjercicios propuestosEjercicios propuestos
rrrr4
rrrr1
rrrr2
rrrr3
θ2
θ3
ϕ
r5
P
Considerando como elemento de entrada el elemento 2, determinar empleando el método de Raven la posición, velocidad y aceleración de P.
13
25
Cinemática y Dinámica de Máquinas. III.2 Métodos analíticos de análisis cinemático
R Sancibrián y A. de Juan. Ing. Mecánica
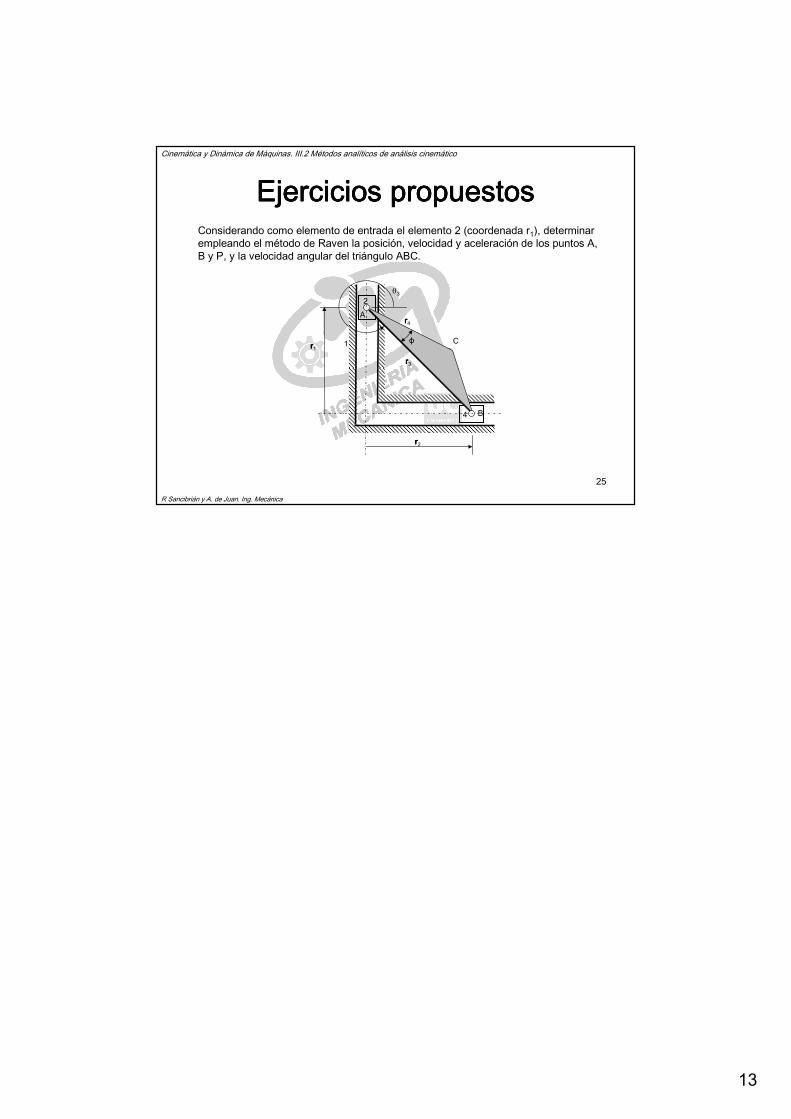
Ejercicios propuestosEjercicios propuestosEjercicios propuestosEjercicios propuestosConsiderando como elemento de entrada el elemento 2 (coordenada r1), determinar empleando el método de Raven la posición, velocidad y aceleración de los puntos A, B y P, y la velocidad angular del triángulo ABC.
B
C
A2
3
4
1 Crrrr1
rrrr2
rrrr3
rrrr4
ϕ
θ3