apuntes análisis de sistemas dinámicos
TRANSCRIPT
Notas del curso
“Analisis de Sistemas No Lineales”
Javier Aracil Santonja
Francisco Salas Gomez
Francisco Gordillo Alvarez
Departamento de Ingenierıa de Sistemas y Automatica
Universidad de Sevilla

ii
Notas del curso “Analisis de Sistemas noLineales”
Impartido por:Javier Aracil
Francisco GordilloFrancisco Salas
25 de septiembre de 2007

2
Indice general
1. Introduccion 1
1.1. El problema del control . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. EL control lineal es local . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1. Control Lineal y no Lineal - Estabilidad en Sistemas de Control 5
I Analisis 6
2. Analisis cualitativo de sistemas dinamicos 7
2.1. Formalizacion del concepto de sistema dinamico . . . . . . . . . . . . . 7
2.2. Crecimiento logıstico o acotado . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1. Retrato de estados de sistemas no lineales . . . . . . . . . . . . 11
2.3. Sistemas Dinamicos Lineales . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1. Sistemas dinamicos autonomos lineales de dimension dos . . . . 15
2.3.2. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4. Sistemas dinamicos no lineales . . . . . . . . . . . . . . . . . . . . . . . 22
2.5. Propiedades de las soluciones . . . . . . . . . . . . . . . . . . . . . . . 23
3

4 INDICE GENERAL
2.5.1. Existencia y unicidad de las soluciones . . . . . . . . . . . . . . 23
2.5.2. Flujo definido por un sistema dinamico . . . . . . . . . . . . . . 24
2.5.3. Sistema dinamico como flujo . . . . . . . . . . . . . . . . . . . . 25
2.5.4. Orbitas y retratos de estados . . . . . . . . . . . . . . . . . . . 26
2.5.5. Puntos de equilibrio . . . . . . . . . . . . . . . . . . . . . . . . 27
2.5.6. Linealizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.5.7. Linealizacion de un sistema dinamico en IRn . . . . . . . . . . . 30
2.5.8. Equivalencia topologica . . . . . . . . . . . . . . . . . . . . . . . 31
2.5.9. Conjuntos lımite y equilibrios . . . . . . . . . . . . . . . . . . . 32
2.6. Ciclos y atractores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.6.1. Conjuntos lımite y atractores . . . . . . . . . . . . . . . . . . . 34
2.6.2. Comportamiento a largo plazo de las trayectorias . . . . . . . . 38
2.6.3. Estudio de orbitas periodicas . . . . . . . . . . . . . . . . . . . 39
2.6.4. Atractores extranos . . . . . . . . . . . . . . . . . . . . . . . . . 42
3. Analisis cualitativo y bifurcaciones en sistemas dinamicos 44
3.1. Analisis cualitativo de sistemas no lineales . . . . . . . . . . . . . . . . 44
3.2. Analisis cualitativo de sistemas dinamicos de dimension 1 . . . . . . . . 44
3.2.1. Estabilidad estructural . . . . . . . . . . . . . . . . . . . . . . . 49
3.3. Familias de sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . . 49
3.3.1. Diagramas de bifurcaciones en sistemas no lineales . . . . . . . . 52

INDICE GENERAL 5
3.4. Bifurcaciones elementales en sistemas de dimension uno . . . . . . . . . 52
3.4.1. Bifurcaciones elementales en sistemas dinamicos de dimension dos 62
3.4.2. Evolucion de los autovalores en una bifurcacion de Hopf. . . . . 67
3.4.3. Bifurcaciones de orbitas periodicas . . . . . . . . . . . . . . . . 67
3.4.4. Bifurcaciones de codimension dos . . . . . . . . . . . . . . . . . 69
3.4.5. Diagrama de bifurcaciones del experimento de Taylor-Couette. . 73
3.5. Crecimiento logıstico con un retraso en la estructura . . . . . . . . . . . 76
References 81
3.6. Apendice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4. Funcion descriptiva y balance armonico 86
4.1. Metodo del primer armonico . . . . . . . . . . . . . . . . . . . . . . . . 86
4.1.1. Ejemplo introductorio . . . . . . . . . . . . . . . . . . . . . . . 86
4.1.2. Principios del metodo . . . . . . . . . . . . . . . . . . . . . . . 90
4.1.3. Transformacion de Fourier . . . . . . . . . . . . . . . . . . . . . 91
4.1.4. Funcion descriptiva . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.1.5. Interpretacion estocastica de la funcion descriptiva . . . . . . . 94
4.1.6. Propiedad del cono . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.2. Algunas funciones descriptivas . . . . . . . . . . . . . . . . . . . . . . . 95
4.2.1. Saturacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.2.2. Rele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6 INDICE GENERAL
4.2.3. Holgura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.2.4. Determinacion experimental de la funcion descriptiva . . . . . . 100
4.3. Analisis de sistemas no lineales mediante la funcion descriptiva . . . . . 101
4.3.1. Una ampliacion del criterio de Nyquist . . . . . . . . . . . . . . 102
4.3.2. Oscilaciones de un servomecanismo no lineal . . . . . . . . . . . 103
4.3.3. Funcion descriptiva independiente de la frecuencia . . . . . . . . 104
4.3.4. Funcion descriptiva dependiente de la frecuencia . . . . . . . . . 105
4.3.5. Estabilidad de los ciclos lımite . . . . . . . . . . . . . . . . . . . 105
4.3.6. Fiabilidad del analisis mediante funciones descriptivas . . . . . . 112
4.4. La funcion descriptiva dual . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.4.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.5. Calculo de varios armonicos en el metodo de balance armonico . . . . . 118
4.5.1. Definicion del algoritmo . . . . . . . . . . . . . . . . . . . . . . 123
4.5.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Bibliografıa 127
5. Bifurcaciones en sistemas de control 129
5.1. Feedback systems with saturation . . . . . . . . . . . . . . . . . . . . . 129
5.1.1. Equilibria in a system with saturation . . . . . . . . . . . . . . 130
5.1.2. Limit cycles in a system with saturation . . . . . . . . . . . . . 131
5.1.3. First order system . . . . . . . . . . . . . . . . . . . . . . . . . 131

INDICE GENERAL 7
5.1.4. Second-order system . . . . . . . . . . . . . . . . . . . . . . . . 133
5.2. Sotomayor-Llibre-Ponce bifurcation analysis . . . . . . . . . . . . . . . 133
5.2.1. Frequency domain interpretation of the Llibre-Ponce bifurcationanalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.2.2. Bounded attraction basin . . . . . . . . . . . . . . . . . . . . . 135
5.3. Control systems with a delay . . . . . . . . . . . . . . . . . . . . . . . . 136
5.3.1. Qualitative Analysis . . . . . . . . . . . . . . . . . . . . . . . . 137
5.3.2. A second-order system . . . . . . . . . . . . . . . . . . . . . . . 137
5.3.3. Qualitative Analysis . . . . . . . . . . . . . . . . . . . . . . . . 138
5.4. Summary of previous results . . . . . . . . . . . . . . . . . . . . . . . . 139

8 INDICE GENERAL

Capıtulo 1
Introduccion
1.1. El problema del control
Mediante el control automatico se trata de concebir y construir los organos de con-trol que gobiernen el comportamiento de las maquinas. Tratamos de concebir maquinasque alimentadas con informacion con relacion al comportamiento de las magnitudes quese quieren controlar, procesen convenientemente esta informacion y concluyan como seha de actuar para conseguir que la maquina se comporte de la forma apetecida.
Veamos un ejemplo matematicamente muy simple de lo que estamos diciendo. Entodo proceso de control estan involucrados dos componentes esenciales: la planta oproceso que se pretende controlar y el organo de control o controlador, con el que segobierna el comportamiento de la planta. Para el diseno de este ultimo, el ingeniero decontrol parte del sistema dinamico que constituye el modelo matematico de la plantaa controlar. Este modelo matematico describe los efectos relativos entre las distintasvariables y los parametros involucrados en el proceso. Ademas, el modelo matematicopermite tambien la simulacion informatica del proceso real que se trata de controlar.De este modo las matematicas intervienen con un papel crucial en la representaciondel proceso cuyo comportamiento se quiere automatizar. Supongamos, en un caso par-ticularmente simple, que el modelo de la planta viene dado por la expresion
x = x+ u (1.1)
En esta expresion aparecen dos variables, la x que representa la magnitud a controlary la u que representa la magnitud mediante la cual se ejerce el control. La senal urepresenta los actuadores o entradas al proceso, y x es la senal procedente de los sensoreso salidas. Observese que la expresion anterior, pese a su sencillez formal, representaun problema particularmente difıcil. En ausencia de senal de control, es decir para
1

2 CAPITULO 1. INTRODUCCION
Planta
Controlador
u x
Figura 1.1: Estructura de realimentacion.
u = 0, el sistema es inestable: la variable x crece exponencialmente. Precisamenteuno de los objetivos basicos que se pretende es estabilizar este sistema inestable. Elingeniero de control tiene que encontrar una estrategia de actuacion sobre el sistemade modo que a partir de las medidas de la senal x sea capaz de determinar la senalde actuacion u, de manera que el comportamiento resultante sea estable. A partir dela informacion x que suministran los sensores se trata de obtener la accion u de losactuadores; es decir, se quiere determinar una funcion u = f(x), que se conoce comoley de control. Para resolver este problema, en primer lugar, tiene que representarmatematicamente lo que pretende alcanzar, que como se acaba de ver es, en primerainstancia, un comportamiento estable. Un posible comportamiento de este tipo para lavariable x viene dado por
x = −kdx (1.2)
en donde kd > 0. Esta es precisamente la representacion matematica de lo que queremoslograr.
Observese que eligiendo adecuadamente el parametro kd podemos hacer que el com-portamiento de x cuando se aproxima al equilibrio estable x = 0, lo haga con unatrayectoria que puede ser elegida en funcion de los objetivos propuestos. Las especifi-caciones de comportamiento a partir de las cuales se adopta un valor para kd puedenser muy variadas. Por ejemplo, podemos hacer que el valor cuadratico medio de ladesviacion de la situacion de equilibrio sea mınimo supuesto el sistema sometido a per-turbaciones de tipo estocastico. La teorıa del control automatico permite resolver elproblema en muchas situaciones de interes practico.
Una vez planteado el problema su resolucion es inmediata. Si se quiere el compor-tamiento (1.2) para el sistema representado por (1.1) bastara con hacer
u = −(1 + kd)x (1.3)
que es la ley de control deseada. En efecto, llevando (1.3) a (1.1) se tiene (1.2).
Para implantar la ley de control (1.3) se requiere una estructura de realimentacion

1.1. EL PROBLEMA DEL CONTROL 3
como la que se muestra en el diagrama de la figura 1. Esta estructura posee un enormeinteres y su estudio sistematico constituye una de las grandes contribuciones de la inge-nierıa del control, que ha trascendido el propio dominio de la ingenierıa para constituiruna aportacion tanto a las ciencias de la naturaleza como a las sociales y humanas. Porello conviene que le dediquemos algun espacio. Si observamos el diagrama de la figura 1veremos que muestra una estructura causal circular, en virtud de la cual toda actuacionu produce un efecto x que se “realimenta”para incidir en la decision del nuevo valor deu que se aplica al sistema, y ası en una espiral sin fin.
Formalizacion del problema abstracto del control (como en su dıa formalizaron lasrepresentaciones geometricas del hombre primitivo o las trayectorias de los primerosmecanicos), en una teorıa matematica de los sistemas realimentados que no es sino unarama de la teorıa de sistemas dinamicos. Esta formulacion abstracta del problema delcontrol consiste en considerarlo como el problema formado por:
1. El modelo matematico de una planta o proceso a controlar, tal como el represen-tado en (1.1).
2. Un comportamiento deseado para el proceso, al que en principio se exigira quesea estable, por ejemplo, mediante una expresion del tipo (1.2). Ademas se leimpondran otras condiciones adicionales, de modo que se cumplan ciertas especi-ficaciones.
3. Se trata de determinar la ley de control de modo que actuando sobre el procesose consiga el comportamiento deseado, lo que, para el ejemplo que ha de servidode motivacion, se consigue con la ley de control (1.3).
Esta es la situacion ideal con la que aspira a encontrarse el que trata de resolver unproblema de control. Veremos luego, al considerar el caso del pendulo invertido, que enla practica hay que hacer importantes matizaciones a este esquema.
El modelo matematico del proceso a controlar de la expresion (1.1) es un sistemadinamico lineal. Las representaciones lineales de los procesos tienen la ventaja de que lateorıa matematica de sistemas dinamicos lineales esta muy elaborada y su aplicacionpractica presenta considerables ventajas. Sin embargo, sabemos que constituye unaprimera aproximacion, por lo que su capacidad de representar es limitada. Por ejemplo,el modelo lineal supone que las magnitudes pueden tomar valores en el intervalo (±∞),lo que constituye una idealizacion ya que toda magnitud fısica se desenvuelve en unrango acotado. Si el sistema posee componentes mecanicas, un modelo estrictamentelineal no considera los efectos de la friccion o de las holguras en los mecanismos detransmision. El modelo lineal es solamente una primera aproximacion que dependiendodel problema que se tenga entre manos puede ser suficiente o no.

4 CAPITULO 1. INTRODUCCION
El problema del control tal y como se ha resuelto mediante las expresiones (1.1),(1.2) y (1.3) constituye una version enormemente simplificada de un problema que, aunen su planteamiento lineal, si x y u son vectores adquiere una considerable complejidad,que se incrementa ademas si los modelos son no lineales. Pero aun en esa versionenormemente simplificada estan presentes todos los elementos que concurren en unproblema de control. Tenemos un cierto ambito de la realidad, el proceso a controlar,del que necesitamos una adecuada representacion matematica mediante un sistemadinamico, tal como (1.1). Para llegar a esta representacion matematica necesitamosrecurrir a los conocimientos que se tienen con relacion al proceso en cuestion; o recurrira tecnicas de modelado especıficas mediante ajuste de modelos. En todo caso partimosde una descripcion matematica de un cierto aspecto de la realidad, de la que la expresion(1.1) es una muestra particularmente sencilla.
1.2. EL control lineal es local
Sea el sistema de segundo orden
x =
[0 1
−a2 −a1
]x+
[01
]u
con ley de control
u = −Kx = − [k2 k1
]x
El sistema en bucle cerrado es
x =
[0 1
−a2 + k1 −a1 + k2
]x
la dinamica del sistema en bucle cerrado puede ser definida arbitrariamente,incluso en el caso de que la planta sea inestable.
En realidad esto solo es cierto localmente.
Las no linealidades en el bucle alteran la estructura del retrato de estados en elespacio de estados global.
Sistemas no lineales
Los sistemas no lineales muestran comportamiento mas complejos que los lineales.

1.2. EL CONTROL LINEAL ES LOCAL 5
Los sistemas no lineales presentan dos diferencial principales con respecto a loslineales:
• Pueden tener multiples atractores, no solo el atractor puntual asociado alpunto de operacion;
• Tres tipos principales de atractores:
◦ Puntos de equilibrio.
◦ Ciclos lımite.
◦ Atractores extranos.
En estas norteas solo trataremos puntos de equilibrio y ciclos lımite.
The full consideration of nonlinear effects is out of scrutiny
1.2.1. Control Lineal y no Lineal - Estabilidad en Sistemas de
Control
Uno de los principales problemas que se plantean en la teorıa de control ha sido,desde sus orıgenes, el estudio de la estabilidad. Para sistemas lineales con dimensionesfinitas es posible organizar las nociones de estabilidad de las que se dispone en torno aunos pocos conceptos basicos que, ademas pueden caracterizarse de forma precisa enterminos algebraicos. Sin embargo, los sistemas no lineales presentan una variedad decomportamientos mucho mas amplios de modo que la clasificacion que es posible haceren lineales, de estables y no estables, ya no lo es para el caso de sistemas no lineales.
Un problema que se ha suscitado en el estudio de estos ultimos es el establecercondiciones contrastables para analizar la estabilidad de un sistema sin conocer ex-plıcitamente sus soluciones. La contribucion clave a este problema se basa en los tra-bajos de Liapunov. Su segundo metodo de analisis de estabilidad permite demostrarpropiedades locales y globales de estabilidad a partir del signo de la tasa de disipacionde una funcion tipo energıa. Posteriormente, otra contribucion importante, fue el re-conocimiento de que las funciones de Liapunov pueden captar la propia naturaleza de laestabilidad asintotica y que la existencia de esas funciones, con adecuadas propiedadesde disminucion a lo largo de las trayectorias del sistema, permiten caracterizar tantolocal como globalmente la estabilidad asintotica. Mas recientemente, la teorıa de la pa-sividad y la estabilidad-estado (ISS) permiten extender a sistemas de control (sistemascon al menos una entrada) todo el cuerpo de resultados que se tenıan para sistemasautonomos. Las desigualdades de disipacion y el segundo metodo de Liapunov jueganun papel central en los llamados metodos constructivos de control no lineal reciente-mente desarrollados. Normalmente se aplican a sistemas de dimensiones finitas.

6 CAPITULO 1. INTRODUCCION
Parte I
Analisis
7


Capıtulo 2
Analisis cualitativo de sistemasdinamicos
2.1. Formalizacion del concepto de sistema dinami-
co
Nocion intuitiva de sistema dinamico: conjunto de componentes conectados entreellos de modo que presenten un comportamiento coordinado y realicen una tareadeterminada.
Se consideran sistemas:
• a cuyos componentes se asocian magnitudes xi;
• algunas magnitudes representan el cambio con el tiempo de otras:
El modelo matematico se construye a partir de las relaciones entre las correspon-dientes variables.
Nos ocuparemos fundamentalmente de sistemas dinamicos dados por ecuacionesdiferenciales o en diferencias: son los sistemas dinamicos de variables continuas
La nocion de sistema dinamico incluye el conjunto X de los posibles estados quepuede alcanzar y una regle o ley que regula la evolucion de los estados en eltiempo.
Espacio de estados Los posibles estados de un sistema se representan mediantepuntos de un conjunto X. Este conjunto recibe la denominacion de espacio deestados.
Ejemplo:
9

10 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Figura 2.1: Pendulo.
S = {θ}R = {θ}X = S ×R
X es un cilindro (una variedad).
El principal componente de un sistema dinamico es una regla de evolucion quedetermina el estado xt a partir de x0. Esta regla se representa mediante la apli-cacion
ϕt : X → X
xt = ϕ(x0)
ϕt se denomina operador de evolucion.
Para sistemas en tiempo continuo la familia {ϕt}t∈T de operadores de evolucionse denomina flujo.
A un sistema dinamico (X, f) se asocia un espacio de estados X y una aplicacionϕt : X → X que permite establecer la evolucion en X.
2.2. Crecimiento logıstico o acotado
La estructura de realimentacion positiva permite dar razon del proceso de crec-imiento. Sin embargo, sabemos que en la realidad todo proceso de crecimiento acabapor abortarse tarde o temprano. No existe el crecimiento indefinido (mas que en situa-ciones extremas idealizadas). La forma de crecimiento con la que normalmente nos
2.2. CRECIMIENTO LOGISTICO O ACOTADO 11
t
exponencialcrecimiento comportamiento asintotico
,
Figura 2.2: Crecimiento logıstico o sigmoidal.
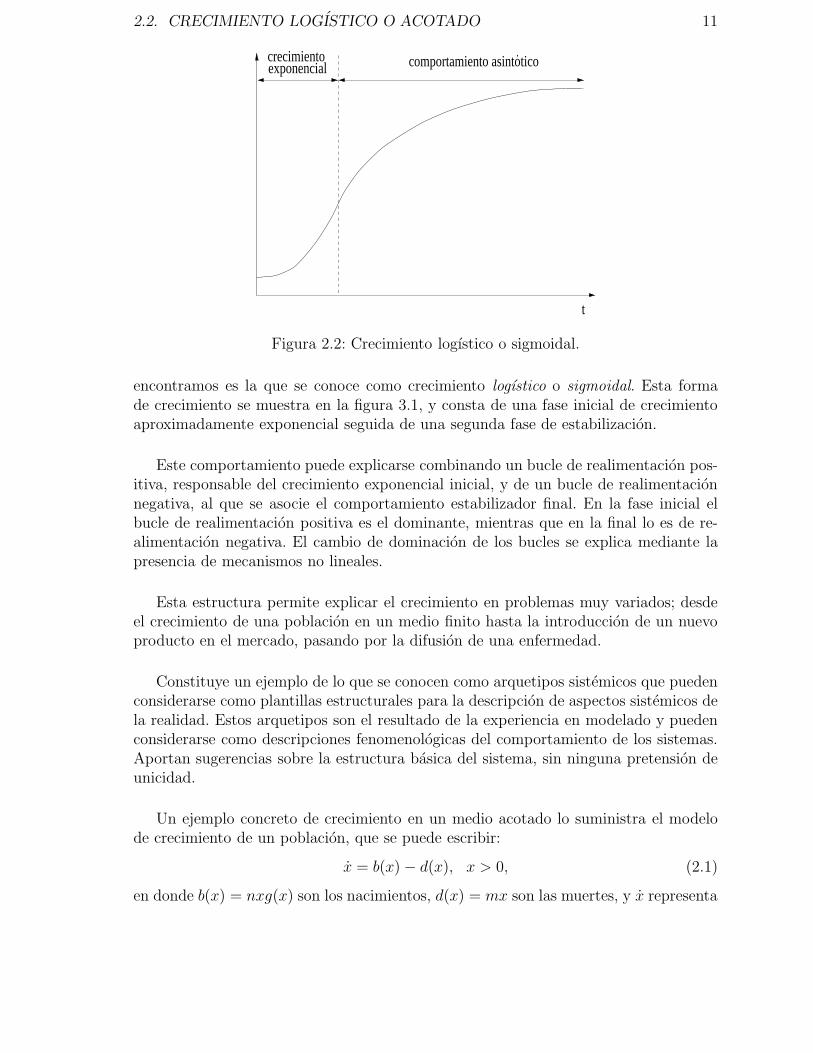
encontramos es la que se conoce como crecimiento logıstico o sigmoidal. Esta formade crecimiento se muestra en la figura 3.1, y consta de una fase inicial de crecimientoaproximadamente exponencial seguida de una segunda fase de estabilizacion.
Este comportamiento puede explicarse combinando un bucle de realimentacion pos-itiva, responsable del crecimiento exponencial inicial, y de un bucle de realimentacionnegativa, al que se asocie el comportamiento estabilizador final. En la fase inicial elbucle de realimentacion positiva es el dominante, mientras que en la final lo es de re-alimentacion negativa. El cambio de dominacion de los bucles se explica mediante lapresencia de mecanismos no lineales.
Esta estructura permite explicar el crecimiento en problemas muy variados; desdeel crecimiento de una poblacion en un medio finito hasta la introduccion de un nuevoproducto en el mercado, pasando por la difusion de una enfermedad.
Constituye un ejemplo de lo que se conocen como arquetipos sistemicos que puedenconsiderarse como plantillas estructurales para la descripcion de aspectos sistemicos dela realidad. Estos arquetipos son el resultado de la experiencia en modelado y puedenconsiderarse como descripciones fenomenologicas del comportamiento de los sistemas.Aportan sugerencias sobre la estructura basica del sistema, sin ninguna pretension deunicidad.
Un ejemplo concreto de crecimiento en un medio acotado lo suministra el modelode crecimiento de un poblacion, que se puede escribir:
x = b(x) − d(x), x > 0, (2.1)
en donde b(x) = nxg(x) son los nacimientos, d(x) = mx son las muertes, y x representa

12 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
f(x)=1+2x-3x
f(x)=1+x-2x
f(x)=1-x2 (δ=1)
(δ=1/2)
(δ=1/3)2
2
Figura 2.3: Forma de la funcion g(x) para distintos valores del parametro δ.
la derivada (variacion) de x con respecto al tiempo t. De acuerdo con esta ecuacion elcrecimiento de la poblacion x resulta del exceso de nacimientos sobre muertes. Convieneobservar que las muertes dependen linealmente de la poblacion x, mientras que losnacimientos dependen de x a traves de la funcion g que hace variar la tasa de natalidadcon el nivel alcanzado por la poblacion x. Una hipotesis razonable es que g es no lineal,y tiene la forma cualitativa que se muestra en la figura 2.3.
De acuerdo con esta figura cuando la poblacion es muy pequena la natalidad crececon la poblacion, mientras que cuando es grande decrece. Esta forma de g es consis-tente con el supuesto del crecimiento sigmoidal segun el cual en las fases iniciales decrecimiento este es explosivo, y en las finales tiende a un valor asintotico. De la curva glo unico que nos interesa es su forma creciente al principio y decreciente luego; es decir,su forma cualitativa. Podemos adoptar para ella la expresion matematica siguiente:
g(x) = 1 +
(1 − δ
δ
)x− x2
δ, δ ∈ (0, 1] .
es decir, una forma parabolica (figura 2.3).
De acuerdo con lo que se ha visto, la expresion (2.1) puede escribirse
x = x(ng(x) −m).
Esta expresion es un ejemplo de lo que se conoce como un sistema dinamico. Su partederecha puede interpretarse como la regla que establece como se produce la variacion x

2.2. CRECIMIENTO LOGISTICO O ACOTADO 13
de x a lo largo del tiempo. Esta expresion puede interpretarse tambien como un campovectorial x definido sobre X = {x}. En general, un sistema dinamico se define como elobjeto formado por un espacio de estados X (una variedad) y un campo vectorial f ,definido en X
sistema dinamico = variedad de estados X + campo vectorial f
De acuerdo con ello un sistema dinamico se define por el par (X, f). Una de las for-mulaciones mas generales de un sistema dinamico, mediante un sistema de ecuacionesdiferenciales de primer orden, es la siguiente
x = f(x) (2.2)
en donde la funcion f establece la regla mediante la cual se produce el cambio delestado a lo largo del tiempo y representa la dinamica del sistema
xt+dt = xt + f(xt)dt.
Existen otras formulaciones para la transicion entre estados, que dan lugar a otrastantas formas de escribir sistemas dinamicos. Sin embargo aquı nos limitaremos a laque se acaba de enunciar.
El espacio X tiene, en general, dimension n, de modo que (2.2) se descompone enun conjunto de ecuaciones de la forma:
xi = fi(x1, x2, ..., xn) (2.3)
a cada una de las cuales corresponde una relacion de influencia
X1, X2, ...Xn → dXi
dt(2.4)
De este modo es posible concebir una transicion de los grafos, mediante relaciones deinfluencia, que se han considerado anteriormente (recuerdese la figura ??), a sistemasdinamicos como los de la expresion (2.2). Conviene observar que para esta transicionhay que enriquecer la informacion estructural de las relaciones de influencia con infor-macion adicional. La dinamica de sistemas, como metodo para el modelado y simulacionde sistemas dinamicos, aporta herramientas conceptuales e informaticas para realizaresa transicion (Aracil y Gordillo 1997).
2.2.1. Retrato de estados de sistemas no lineales
Cada atractor tiene su cuenca de atraccion.

14 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Los sistemas lineales tienen retratos de estado sencillos:
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1Phase Plane
x1
x2
Los sistemas no lineales tienen retratos de estado mas complejos:
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1/pi
x2/p
i
La teorıa global se ocupa de la forma en que los atractores y sus cuencas deatraccion se combinan en el retrato de estados.
2.3. Sistemas Dinamicos Lineales
Aunque el objetivo de este curso es el estudio de sistemas dinamicos en toda sugeneralidad, por tanto no lineales, conviene recordar algunos resultados relativos a lossistemas dinamicos lineales, ya que, como veremos, los sistemas dinamicos no linealesse comportan localmente como lineales.
Un sistema dinamico lineal viene dado por una expresion de la forma
x = Ax, x ∈ IRn

2.3. SISTEMAS DINAMICOS LINEALES 15
en donde A es una matriz n × n constante que tiene todos sus valores propios realesy distintos. Un resultado bien conocido de la teorıa de sistemas lineales dice que si losvalores propios λ1, λ2, ..., λn de una matriz A son reales y distintos, entonces todo elconjunto de vectores propios correspondientes {v1, v2, ..., vn} forma una base de IRn, encuyo caso la matriz
P = [v1, v2, ..., vn]
es invertible yP−1AP = diag[λ1, λ2, ..., λn]
si se realiza el cambio de coordenadas
y = P−1x
en donde P es la matriz invertible anterior. Se tiene entonces
y = P−1APy
de donde se tiene quey(t) = diag[eλ1t, eλ2t, ..., eλnt]y(0)
y tambienx(t) = Pdiag[eλ1t, eλ2t, ..., eλnt]P−1x(0)
Ejemplo:
Sea el sistema lineal
x1 = −x1 − 3x2 (2.5)
x2 = 2x2 (2.6)
siendo x(0) = (c1, c2)T . De acuerdo con la anterior se tiene que la solucion del sistema
lineal es
x1 = c1e−t + c2(e
−t − e2t) (2.7)
x1 = c2e2t (2.8)
En el caso en el que la matriz A tenga valores propios reales y complejos, y ademasalgunos de ellos sean multiples, se tiene un resultado analogo al anterior, pero de mayorcomplejidad. Sea A una matriz real que posea los valores propios reales λi, i = 1, ..., ky los valores propios complejos
λi = ai + jbi, λi = ai − jbi, i = k + 1, ..., n
Entonces existe una base para R2n−k
{v1, ..., vk, vk+1, uk+1, ..., vn, un}

16 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
en donde vi, i = 1, ..., n y wi = ui±jvi, i = 1, ..., n son los vectores propios generalizadosde A, tal que
P = [v1...vkvk+1uk+1...vnun]
es una matriz invertible y
P−1AP =
⎡⎢⎣B1
. . .
Br
⎤⎥⎦
donde los bloques elementales de Jordan son de la forma⎡⎢⎢⎢⎢⎣λ 1 0 · · · 00 λ 1 · · · 0
· · ·0 · · · 0 λ 10 · · · 0 0 λ
⎤⎥⎥⎥⎥⎦
para un valor propio real multiple λ de A, o bien de la forma⎡⎢⎢⎢⎢⎣D I2 0 · · · 00 D I2 · · · 0
· · ·0 · · · 0 D I20 · · · 0 0 D
⎤⎥⎥⎥⎥⎦
en donde
D =
[a −bb a
], I2 =
[1 00 1
]y 0 =
[0 00 0
]para un valor propio complejo multiple λ = a+ bj de A.
La solucion del sistema lineal se escribe en este caso:
x(t) = Pdiag[eBit]P−1x(0)
Para concretar consideremos el caso de sistemas lineales en un espacio de dos dimen-siones
x = Ax x ∈ R2 (2.9)
en donde A es una matriz real. En tal caso existe una matriz P real y no singular talque
B = P−1AP
tiene una de las formas siguientes:
B =
[λ 00 μ
], B =
[λ 10 λ
]y B =
[a −bb a
]

2.3. SISTEMAS DINAMICOS LINEALES 17
La solucion del sistema dinamico lineal en este caso es de la forma:
x = Bx x(0) = x0 (2.10)
que se convierte en cada uno de los tres casos anteriores en
x(t) =
[eλt 00 eλt
]x0
x(t) = eλt
[1 t0 1
]x0
y
x(t) = eat
[cos bt − sin bt− sin bt cos bt
]x0
El comportamiento de las soluciones de (2.9) se deduce del de (2.10). En la proximaseccion se presentara un resultado mas detallado.
2.3.1. Sistemas dinamicos autonomos lineales de dimensiondos
Los sistemas lineales bidimensionales son una clase particular de sistemas autonomosde dimension dos x = f(x) en los que el campo vectorial f : R2 �→ R2 esta dado por unafuncion lineal. Es decir un sistema lineal plano puede ser escrito de la forma x = Ax,donde:
x =
[x1
x2
], A =
[a11 a12
a21 a22
].
A continuacion se presentan algunas propiedades de los sistemas lineales bidimen-sionales, que son extensibles a sistemas de orden superior.
Las soluciones de un sistema lineal x = Ax estan definidas para todo t ∈ R.
Si x1(t) y x2(t) son soluciones del sistema x = Ax, y c1 y c2 son dos numeros reales,entonces la combinacion lineal c1x
1(t) + c2x2(t) es tambien solucion del sistema lineal.
A esto se le denomina principio de superposicion.
Dos soluciones x1(t) y x2(t) del sistema x = Ax se dice que son linealmente inde-pendientes si para t ∈ R, la relacion
c1x1(t) + c2x
2(t) = 0

18 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
implica que c1 = c2 = 0. La independencia lineal se comprueba si det(x1(t)|x2(t)) �= 0para todo t ∈ R.
Si x1(t) y x2(t) son soluciones del sistema x = Ax entonces la matriz X(t) =(x1(t)|x2(t)) se denomina matriz solucion; si ademas las soluciones x1(t) y x2(t) sonlinealmente independientes para todo t ∈ R, entonces se dice que X(t) es una matrizfundamental de soluciones de x = Ax.
Si X(t) es una matriz fundamental de soluciones de x = Ax y cumple la condicioninicial X(0) = I (matriz identidad), entonces se dice que es una matriz principal desoluciones.
Si X(t) es una matriz fundamental de soluciones, la solucion de la ecuacion difer-encial x = Ax que satisface la condicion inicial x(0) = x0 esta dada por la expresion:
ϕ(t,x0) = eAtx0,
dondeeAt ≡ X(t)[X(0)]−1.
Equivalencia cualitativa en sistemas lineales
Dos sistemas lineales de dimension dos x = Ax y x = Bx se dice que sontopologicamente equivalentes si hay un homeomorfismo h : R2 �→ R2 en el plano, talque, h es continua y con inversa continua, que transforma las orbitas de x = Ax en lasde x = Bx y conserva su sentido en el tiempo. Es decir:
h(eAtx) = eBth(x) para todo t ∈ R y x ∈ R2.
A continuacion, y dado el caracter restrictivo de la equivalencia lineal de sistemas,se presentan dos teoremas sobre la equivalencia topologica de sistemas y su clasificacioncualitativa.
Teorema 2.1. Sean dos matrices A y B que tienen autovalores con parte real dis-tinta de cero (sistemas hiperbolicos), entonces los sistemas x = Ax y x = Bx sontopologicamente equivalentes si y solo si las matrices A y B tienen el mismo numerode autovalores con parte real negativa (y por consiguiente tambien positiva).
Ası pues, en sistemas planos, hay tres clases de sistemas hiperbolicos lineales, quepueden representarse simplificadamente como:
(i)
[ −1 00 −1
]tiene dos autovalores negativos, es un sumidero hiperbolico.

2.3. SISTEMAS DINAMICOS LINEALES 19
(ii)
[1 00 1
]tiene dos autovalores positivos, es una fuente hiperbolica.
(iii)
[1 00 −1
]un autovalor positivo y otro negativo, punto de silla hiperbolico.
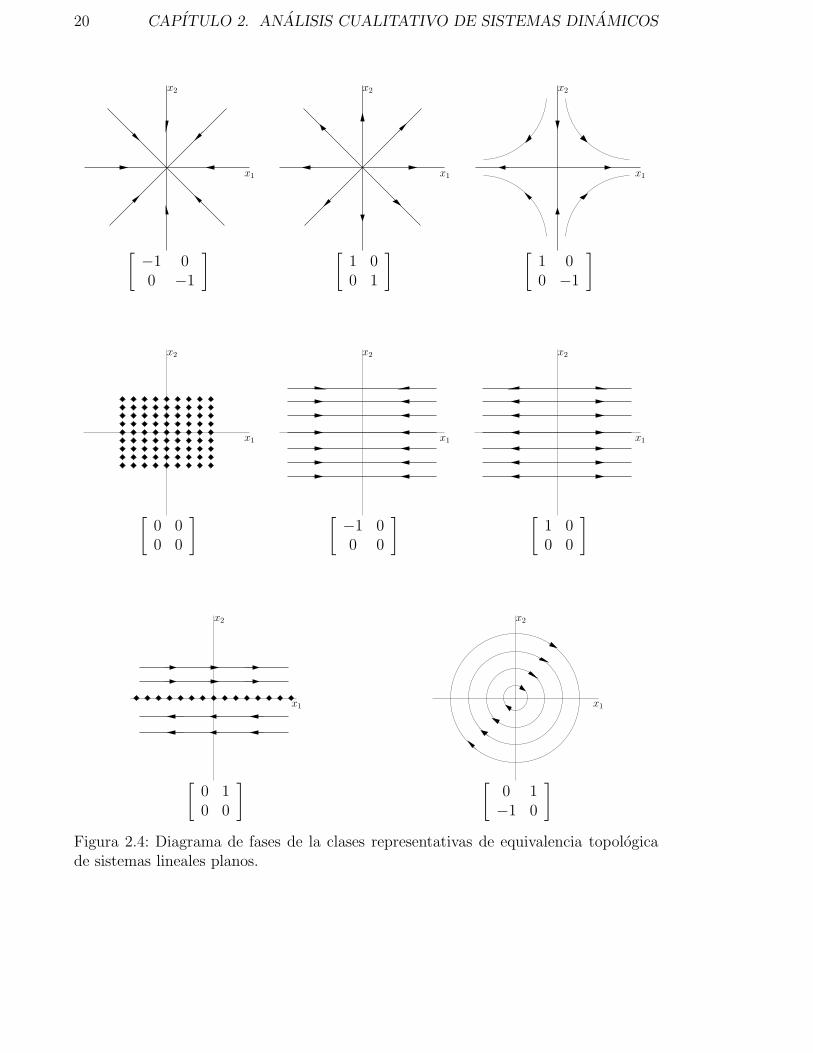
Teorema 2.2. Si la matriz de coeficientes A tiene al menos un autovalor con partereal nula (sistema no hiperbolico), entonces el sistema plano lineal x = Ax es topologi-camente equivalente a uno de los siguientes cinco sistemas lineales:
(i)
[0 00 0
]matriz cero. Cualquier orbita es un punto de equilibrio.
(ii)
[ −1 00 0
]un autovalor negativo y otro cero. Los conjuntos ω-lımite (finales)
de todas las orbitas positivas (hacia adelante) son puntos de equilibrio.
(iii)
[1 00 0
]un autovalor positivo y otro cero. Los conjuntos α-lımite (inicio) de
todas las orbitas negativas (hacia atras) son puntos de equilibrio.
(iv)
[0 10 0
]dos autovalores nulos pero es de rango 1. Todas las orbitas, positivas
y negativas, que no sean puntos de equilibrio no estan limitadas.
(v)
[0 1−1 0
]dos autovalores imaginarios puros. Cada orbita que no sea un equi-
librio es periodica.
En la figura 2.4 se muestra el diagrama de fases de cada una de las clases rep-resentativas de equivalencia topologica de sistemas lineales definidas en los teoremasanteriores.
Dentro de la clasificacion de sistemas hiperbolicos realizada en el teorema 2.1 sepueden definir varios tipos de equilibrios, estables e inestables, dependiendo de si losautovalores son complejos o reales.
2.3.2. Estabilidad
Si todos los valores propios de una matriz no singular A de dimension n× n tienenparte real no nula, se dice que el flujo
eAt : IRn → IRn
20 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
x1
x2
[ −1 00 −1
]
x1
x2
[1 00 1
]
x1
x2
[1 00 −1
]
x1
x2
[0 00 0
]
x1
x2
[ −1 00 0
]
x1
x2
[1 00 0
]
x1
x2
[0 10 0
]
x1
x2
[0 1−1 0
]
Figura 2.4: Diagrama de fases de la clases representativas de equivalencia topologicade sistemas lineales planos.

2.3. SISTEMAS DINAMICOS LINEALES 21
es hiperbolico. El punto de equilibrio unico x = 0 se dice que es un punto de equilibriohiperbolico.
Un punto de equilibrio hiperbolico puede ser o bien un pozo, si todos los valorespropios tienen parte real estrictamente negativa o bien, una fuente si todos los valorespropios tienen parte real estrictamente positiva, o bien un punto de silla o ensilladurasi los valores propios tienen signos diferentes.
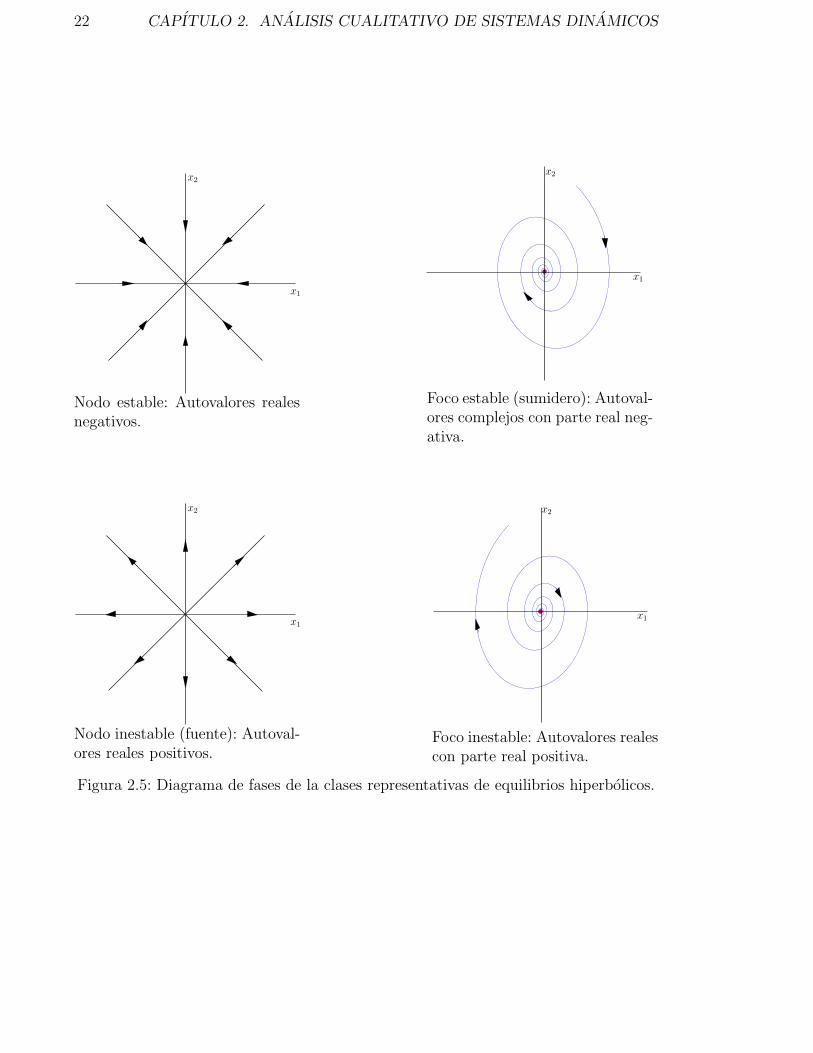
Veamos con detalle el caso de un sistema lineal de dos dimensiones. Si x = 0 es unpozo o una fuente, las soluciones se acercan a (o se separan de) x = 0 de dos formas,o bien bajo la forma de nodo, o bien bajo la forma de foco.
Sea δ = detA y τ = trazaA y considerese el sistema lineal
x = Ax x ∈ IRn
El punto de equilibrio x = 0 es (Fig 2.5)
Una ensilladura si δ < 0
Un nodo estable siδ > 0, τ 2 − 4δ ≥ 0, y τ < 0
Un nodo inestable siδ > 0, τ 2 − 4δ ≥ 0, y τ > 0
Un foco estable siδ > 0, τ 2 − 4δ < 0, y τ < 0
Un foco inestable siδ > 0, τ 2 − 4δ < 0, y τ > 0
Un centro siδ > 0, τ = 0
Los valores propios de A se pueden escribir:
λ =τ ±√
τ 2 − 4δ
2
En el caso general para n ≥ 1 se tiene lo siguiente. De acuerdo con lo que se havisto anteriormente la solucion de un sistema lineal
x = Ax x ∈ IRn x(0) = x0 (2.11)
22 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
x1
x2
Nodo estable: Autovalores realesnegativos.
x1
x2
Foco estable (sumidero): Autoval-ores complejos con parte real neg-ativa.
x1
x2
Nodo inestable (fuente): Autoval-ores reales positivos.
x1
x2
Foco inestable: Autovalores realescon parte real positiva.
Figura 2.5: Diagrama de fases de la clases representativas de equilibrios hiperbolicos.

2.3. SISTEMAS DINAMICOS LINEALES 23
se escribex(t) = eAtx0
La aplicacion eAt : IRn → IRn describe el comportamiento del punto x0 ∈ IRn a lo largode las trayectorias de (2.11).
Un subespacio E ⊂ IRn se dice invariante bajo el flujo eAt : IRn → IRn si
eAtE ⊂ E
para todo t ∈ R.
Sea E el espacio de los vectores propios generalizados de A correspondientes a unvalor propio λ, entonces,
AE ⊂ E
Para demostrar este resultado sea {v1, v2, ..., vk} un base de E formada por los vectorespropios generalizados. Sea v ∈ E,
v =
k∑i=1
civi
y, por linealidad,
Av =
k∑i=1
ciAvi
Como cada vi verifica(A− λI)kivi = 0
para un cierto ki mınimo, se puede escribir
(A− λI)vi = Vi
o lo que es lo mismo Vi ∈ (A − λI)ki−1 ⊂ E. Se deduce que Avi ∈ E y por tantoAv ∈ E.
Sea wi = ui + jvi un vector propio generalizado de la matriz A, correspondiente alvalor propio λi = ai + jbi. Consideremos igualmente la base IRn
B = {u1, ..., uk, uk+1, vk+1, ..., um, vm}n = 2m − k, entonces, Es = span{ui, vi; ai < 0} es el subespacio estable, Ec =span{ui, vi; ai = 0} es el subespacio central, Eu = span{ui, vi; ai > 0} es elsubespacio inestable, asociados a (2.11).
Utilizando el lema anterior se puede demostrar la propiedad siguiente de los sube-spacios estable, inestable y central:

24 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Sea A una matriz real de dimension n× n, entonces
IRn = Es ⊕Eu ⊕Ec
en donde Es, Eu y Ec son respectivamente los subespacios estable, inestable y centralde (2.11). Ademas Es, Eu y Ec son subespacios invariantes bajo el flujo eAt de (2.11).
Conviene observar que las propiedades siguientes son equivalentes:
todos los valores propios de A tienen parte real estrictamente negativa,
∀xo ∈ IRn, lımt→∞ eAtx0 = 0
y para x0 �= 0, lımt→−∞ eAtx0 = ∞
ademas,
todos los valores propios de A tienen parte real estrictamente positiva,
∀xo ∈ IRn, lımt→−∞ eAtx0 = 0
y para x0 �= 0, lımt→∞ eAtx0 = ∞
2.4. Sistemas dinamicos no lineales
Despues del repaso que se ha hecho en la seccion anterior de algunos resultadosgenerales sobre sistemas lineales de la forma
x = Ax, x(0) = x0
ahora vamos a estudiar los sistemas dinamicos no lineales
x = f(x), x(0) = x0 (2.12)
con ello dispondremos tambien de resultados para el estudio de sistemas de control nolineales
x = f(x, u), x(0) = x0 (2.13)
y = h(x) (2.14)

2.5. PROPIEDADES DE LAS SOLUCIONES 25
puesto que siempre que se tenga una ley de control de la forma
u = k(x)
se tendra que el sistema realimentado correspondiente tomara la forma
x = f(x, k(x)), x(0) = x0
y = h(x)
lo que lo convierte en un sistema dinamico no lineal (2.12).
El estudio de los sistemas dinamicos no lineales comprende dos partes: una maselemental de caracter local, que se relaciona con el estudio de sistemas lineales cuandoel punto de equilibrio entorno al que se estudia el comportamiento del sistema eshiperbolico; y una parte mas especıfica en la que se ponen en evidencia comportamientoscompletamente nuevos con relacion a los que presentan los sistemas lineales.
2.5. Propiedades de las soluciones
2.5.1. Existencia y unicidad de las soluciones
Considerese en primer lugar el sistema dinamico
x = 3x23 , x(0) = x0 (2.15)
para cuya integracion conviene recordar que∫xkdx =
xk+1
k + 1
El sistema dinamico anterior puede escribirse de la forma
dx
3x23
= dt
La integracion del primer miembro es
∫x−
23dx =
x13
13
por lo que la integracion de la ecuacion anterior conduce a
x13 (t) − x
13 (0) = t

26 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Es decirx(t) = t3
Pero, ademas, es facil ver quex(t) = 0
tambien es una solucion del sistema dinamico que satisface las condiciones iniciales.Por tanto el sistema dinamico anterior posee dos soluciones. Conviene observar que(2.15) es continua en x = 0 pero que no es diferenciable. Este hecho justifica el que lasolucion no sea unica y sugiere la necesidad de que el sistema sea diferenciable paratener la unicidad. Aquı no profundizaremos en estas cuestiones, por ser mas propias deun curso de matematicas, pero sin embargo si conviene esbozarlas para no olvidar lassutilezas matematicas que presentan los sistemas dinamicos no lineales.
Sea f ∈ C1(U) en donde U es un abierto de IRn. Se dice que x(t) es una solucionde la ecuacion diferencial no lineal
x = f(x)
sobre un intervalo Y , si x(t) es diferenciable sobre Y y
˙x = f(x)
para todo t ∈ I.
Po otra parte sea x0 ∈ U . x(t) es una solucion del problema con valor inicial
x = f(x) x(0) = x0
sobre un intervalo Y , si t0 ∈ I, x(t0) = x0 y si x(t) es una solucion de la ecuaciondiferencial no lineal
x = f(x)
sobre el intervalo Y .
Hay un teorema, que no vamos a demostrar aquı, que dice que si U es un abiertode IRn que contiene x0 y supongamos que f ∈ C1(U), entonces existe un α > 0 tal queel problema con valor inicial
x = f(x) x(0) = x0
tiene una solucion unica x(t) sobre el intervalo [−α, α].
2.5.2. Flujo definido por un sistema dinamico
Sea U un abierto de IRn y sea f ∈ C1(U). Para x0 ∈ U sea ϕ(t, x0) la solucion delproblema con valor inicial
x = f(x) x(0) = x0 (2.16)

2.5. PROPIEDADES DE LAS SOLUCIONES 27
definida sobre un intervalo maximo de existencia I(x0). Entonces para t ∈ I(x0) laaplicacion
ϕt : U → U
x0 �→ ϕt(x0) = ϕ(t, x0)
se denomina flujo de la ecuacion diferencial (2.16) o flujo del campo de vectores f(x).
En lo que sigue se empleara la anotacion
Ω = {(t, x0) ∈ R× U ; t ∈ I(x0)}
Las propiedades del flujo lineal
ϕt : IRn → IRn
x0 �→ ϕt(x0) = eAtx0
se cumplen tambien para un flujo no lineal definido por (2.16).
2.5.3. Sistema dinamico como flujo
La aplicacion ϕ : IR × IRn → IRn representa la totalidad de las soluciones; sedenomina flujo del campo vectorial f (por analogıa con el flujo de un fluido).
La ϕ es tambien la dinamica o regla que especifica como se transforma el estadox ∈ X en otro estado ϕt(x) en el tiempo t.
Propiedades naturales del operador ϕ:
• ϕ0 es la aplicacion identidad.
• Si el sistema es autonomo entonces
ϕt ◦ ϕs = ϕt+s
Si ϕt esta definido para todo t < 0, entonces el sistema es invertible y
ϕ−t = ϕ−1t
Si t ∈ IR, IR+ se dice que el tiempo es continuo.
Si t ∈Z,Z+ el tiempo es discreto.
Se supone que

28 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
• X es un conjunto cerrado en IRn.
• Las aplicaciones ϕt son continuas.
• t ∈Z+ o IR+.
• El sistema dinamico es determinista.
De momento supondremos que el sistema dinamico es autonomo. Esta suposicionla relajaremos mas adelante al considerar sistemas de control.
Un sistema dinamico (X, f) es el objeto formado por un espacio de estados X(una variedad) y un campo vectorial f , definido en X ⊆ IRn, f ∈ C∞(x, x) yT = IR.
dx
dt= f(x)
En automatica un sistema dinamico es un objeto matematico formado por elsextuplo (T,X, U, Y, f, g).
dx
dt= f(x, u)
y = g(x)
Un sistema dinamico en tiempo discreto esta completamente definido mediantela aplicacion de una paso f = ϕ1
ϕ2 = ϕ1 ◦ ϕ1 = f ◦ f = f 2
f 2 es la iteracion de dos pasos.
2.5.4. Orbitas y retratos de estados
Los metodos geometricos para el estudio de sistemas dinamicos estan basadosen imagenes geometricas. Los objetos geometricos basicos asociados a un sistemadinamico son las orbitas y el retrato de estados.
A partir de un estado inicial x0 se genera la trayectoria
ϕt(x0) = x(t)
La proyeccion de la trayectoria sobre X se denomina orbita.

2.5. PROPIEDADES DE LAS SOLUCIONES 29
Se define como un subconjunto ordenado de X
Or(x0) = {x ∈ X|x = ϕt(x0), t ∈ T}
Las orbitas son curvas en sistemas en tiempo continuo y secuencias de puntos ensistemas en tiempo discreto.
El retrato de estados de un sistema dinamico es una representacion de sus orbitasen el espacio de estados (la representacion grafica y esquematica de un conjuntorepresentativo de ellas).
El retrato de estados muestra el numero y los tipos de los estados asintoticos alos que tiende el sistema al hacer t→ ∞.
puede interpretarse como el flujo de un fluido.
2.5.5. Puntos de equilibrio
Un punto x0 ∈ IRn es un punto de equilibrio o un punto crıtico de la ecuaciondiferencial
x = f(x) (2.17)
sif(x0) = 0
A un sistema dinamico (2.17) se asocia la matriz jacobiana
Jx0(f) = Dxf =
⎡⎢⎣
∂f1
∂x1(x0) . . . ∂f1
∂xn(x0)
.... . .
...∂fn
∂x1(x0) . . . ∂fn
∂xn(x0)
⎤⎥⎦
El sistema linealx = Jx0(f)x
se llama linealizacion de (2.17) en el punto x0.
Un punto de equilibrio se dice que es un punto de equilibrio hiperbolico de (2.17)sin ningun valor propio de la matriz jacobiana tiene parte real nula.
Conviene observar que si x0 es un punto de equilibrio de (2.17) y si ϕt : U → IRn
es el flujo de la ecuacion diferencial (2.17) entonces ϕt(x0) = x0 para todo t ∈ R. Portanto x0 es un punto fijo para el flujo ϕt; se dice tambien que es un 0, un punto crıticoo tambien un punto singular el campo de vectores f . Como en el caso lineal, un puntode equilibrio hiperbolico se dira que es un pozo si todos su valores propios tienen parte

30 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
real estrictamente negativa, una fuente si todos su valores propios tienen parte realestrictamente positiva o, por ultimo, una ensilladura o un punto de silla si los valorespropios tienen signos diferentes.
Ejemplo
Sea el sistema dinamico
f(x) =
[x2
1 − x22 − 1
2x2
]
Para estudiar los puntos de equilibrio de este sistema hay que resolver el sistemade ecuaciones
x21 − x2
2 − 1 = 02x2 = 0
que conduce ax2
1 − 1 = 0 ⇒ x1 = ±1
por lo que se tiene que el sistema presenta dos puntos de equilibrio,
x1e = [1, 0]T x2
e = [−1, 0]T
La matriz jacobiana de este sistema dinamico es
J =
[2x1 −2x2
0 2
]
que en el equilibrio x1e se convierte en
J(x1e) =
[2 00 2
]
cuyos autovalores son positivos por lo que es una fuente. Por otra parte, en el equilibriox2
e la matriz jacobiana toma la forma
J(x2e) =
[ −2 00 2
]
por lo que este punto de equilibrio es una ensilladura.
2.5.6. Linealizacion
Si un punto de equilibrio de (2.17) es hiperbolico, entonces el comportamiento de lassoluciones en un entorno de este punto es semejante al comportamiento de las soluciones

2.5. PROPIEDADES DE LAS SOLUCIONES 31
del sistema linealizado de (2.17) en este punto. En lo que sigue, se supondra que el puntode equilibrio es el origen. Si este no fuese el caso se realizarıa el cambio de coordenadas
x �→ x− x0
Todos los resultados que se exponen a continuacion son validos localmente entorno alpunto de equilibrio considerado (es decir, el origen).
Sea U un abierto de x0 ∈ IRn que contiene el origen, sea f ∈ C1(U) y sea ϕt elflujo asociado al sistema no lineal (2.17). Supongamos que el origen es un punto deequilibrio hiperbolico y que J0f tiene valores propios con parte real estrictamente neg-ativa y n−k valores propios con parte real estrictamente positiva. Entonces existe unasuperficie C1, Ss de dimension k y una superficie C1, Su de dimension n − k respecti-vamente, tangente al espacio estable Es y tangente al espacio inestable Eu asociadosa la linealizacion de (2.17) en el origen
x = Jx0(f)x
Ademas, estas superficies son invariantes bajo el flujo ϕt
ϕt(Ss) ⊂ Ss;ϕt(S
u) ⊂ Su
para todo t ≥ 0 ylımt→∞
ϕt(x0) = 0, ∀x0 ∈ Ss
lımt→−∞
ϕt(x0) = 0, ∀x0 ∈ Su
Por otra parte, para el caso en que exista una variedad de centros, se tiene el siguienteresultado. Sea f ∈ C1(U) en donde U es un abierto de IRn que contiene al origen yr ≥ 1. Supongase que el origen sea un punto de equilibrio de (2.17) y que J0f tengam valores propios con parte real negativa, j valores propios con parte real positiva ym = n− j−k valores reales nula. Entonces existe una superficie Cr, Sc, eventualmenteno unica, de dimension m tangente al espacio central Ec en el origen e invariante bajoel flujo ϕt.
Ejemplo:
Sea el sistema
x1 = x21
x2 = −x2
El subespacio estable Es del sistema linealizado en el origen (unico punto de equilibrio)es el eje x2 y el subespacio central Ec es el eje x1. El resultado anterior predice laexistencia de una superficie invariante central, bajo el flujo y tangente al eje x1 en el

32 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
origen. El propio eje x1 es la tal superficie puesto que x2 = 0 implica x2 = 0. Sinembargo, hay otras superficies centrales. En efecto, la solucion que pasa por el punto(c1, c2) con c1 < 0 viene dada por la solucion particular de
dx2
dx1
= −x2
x21
es decir,
x2 = c2e− 1
c1 e1
x1
La curva
x2 =
{c2e
− 1c1 e
1x1 , x1 < 0
0 x1 ≥ 0
es invariante bajo el flujo.
Por fin, la curva x2 es tangente al origen. Es por tanto una superficie central.Conviene observar que en este ejemplo las superficies centrales son de hecho centrales.El resultado siguiente viene a completar los precedentes. Con el se puede precisar elhecho de que siempre en un entorno de un punto de equilibrio hiperbolico el sistemadinamico no lineal y su linealizado entorno a este punto tiene la misma estructuracualitativa.
2.5.7. Linealizacion de un sistema dinamico en IRn
Para un equilibrio p se define la matriz jacobiana
A =
[∂fi
∂xj
]
En torno a p el sistema dinamico toma la forma linealizada
dx
dt= Ax
Sean λ1, . . . , λn los autovalores de A en un equilibrio p.
• Si Re(λk) < 0, k = 1, ..., n entonces p es un atractor.
• Si p es un atractor entonces Re(λk) ≤ 0, k = 1, ..., n
• Cuando Re(λk) < 0, ∀k se dice que p es un atractor hiperbolico.
• Supongase que p es un atractor hiperbolico para un sistema dinamico f .En tal caso existen infinitos sistemas dinamicos fi que tienen un atractorhiperbolico cerca de p.
• Se dice que p es persistente ante perturbaciones de f .

2.5. PROPIEDADES DE LAS SOLUCIONES 33
Los autovalores de la matriz jacobiana A = [aij ] dependen de forma continua delos valores de sus elementos aij .
En un equilibrio las desigualdades entre autovalores (del tipo λi > 0, o similares)se mantienen para pequenos cambios en los parametros.
En los centros que se definen por igualdades del tipo Re(λ) = 0, cualquier pequenaperturbacion de los valores de los parametros destruira presumiblemente la igual-dad.
Condicion necesaria para que un sistema sea estructuralmente estable es que susequilibrios (y tambien sus ciclos lımite) sean hiperbolicos.
Para que al menos uno de los autovalores sea nulo, y por tanto el sistema pierdala hiperbolicidad, detA = 0.
2.5.8. Equivalencia topologica
Sean dos sistemas dinamicos
x = f(x) (2.18)
x = g(x) (2.19)
Estos dos sistemas se dice que son topologicamente equivalentes, o que tienen la mismaestructura cualitativa, sobre un entorno del origen, si existe un homeomorfismo H talque,
trayectorias de (2.18) ↔ trayectorias de (2.19)
de modo que H preserva la orientacion (la naturaleza de la estabilidad). Si ademas estehomeomorfismo preserva la parametrizacion
H(ϕt(x)) = ψt(H(x))
en donde ϕt y ψt son respectivamente los flujos de los sistemas dinamicos (1) y (2)entonces se dice que estos dos sistemas son topologicamente conjugados.
Sea U un abierto de IRn que contenga al origen. Sea f ∈ C1(U) y sea ϕt el flujo delsistema no lineal
x = f(x)
Supongase que el origen es un punto de equilibrio hiperbolico. Entonces este sistemadinamico y su linealizado entorno al origen
x = Jx0(f)x

34 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
son topologicamente conjugados sobre un intervalo abierto I0 ⊂ R.
Bajo estas hipotesis existe un homeomorfismo H que verifica
H ◦ ϕt(x0) = e(J0f)H(x0)
Ejemplo:
Sea el sistema dinamico
x1 = −x1
x2 = x2 + x21
Sus trayectorias para x1(0) = c1 y x2(0) = c2 son
x1 = c1e−t
x2 = c2et +
c213
(et − e−2t)
Por otra parte
J0f =
[ −1 00 1
]Se puede demostrar que este sistema y su linealizado son topologicamente equivalentesutilizando el homeomorfismo
H(x1, x2) =
[x1
2x2 +x21
3
]
2.5.9. Conjuntos lımite y equilibrios
Conjunto lımite ω(x)
Se define el conjunto lımite de un sistema dinamico como el conjunto formadopor los puntos de X tales que
y ∈ ω(x) ⇐⇒ ∃tk → ∞, x(tk) → y
Conjunto de equilibrios EUn punto p pertenece al conjunto de equilibrios E si
p ∈ E ⇐⇒ x(t) = p, si x0 = p, ∀t⇐⇒ p = ω(p)
un equilibrio se representa por un punto en el retrato de estados y es la massimple de las orbitas.

2.6. CICLOS Y ATRACTORES 35
Ciclo lımite de perıodo T0 > 0
Un ciclo lımite es una trayectoria tal que x(t+ T0) = x(t), ∀tEn la figura 2.6 se muestra el retrato de estados del sistema dinamico
dx
dt= x− y − x(x2 + y2)
dy
dt= x+ y − y(x2 + y2),
-1 0 1 2
-1
0
1
Figura 2.6: Retrato de estados de un sistema de dimension 2, mostrando un ciclo lımite.
Sea el sistema dinamico:dx
dt= f(x) x(0) = x0
Un equilibrio es un p : f(p) = 0.
Un ciclo lımite es una solucion periodica de esta ecuacion diferencial.
2.6. Ciclos y atractores
Despues de la descripcion del comportamiento de las soluciones en un entorno deun punto de equilibrio interesa estudiar el comportamiento entorno de otros conjuntos

36 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
1.5
.75
0
-.75
-1.50 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
t
x
Figura 2.7: Comportamiento oscilatorio de un sistema con un atractor tipo ciclo lımite.
lımites. Los mas notables de ellos son las orbitas periodicas, los bucles homoclınicos,los ciclos separadores o los atractores extranos. Para su estudio se debe adoptar unaperspectiva global de los sistemas dinamicos no lineales.
2.6.1. Conjuntos lımite y atractores
Considerese de nuevo el sistema no lineal autonomo
x = f(x) (2.20)
en donde f ∈ C1(U), U es un abierto de x0 ∈ IRn. Sea x ∈ U , la solucion de (2.20) quepase por x ϕ(., x) : R → U se denomina trayectoria u orbita que pasa por x (algunosautores emplean trayectoria para x(t) y orbita para la proyeccion de la trayectoria enel espacio de estados).
Un punto p ∈ U es un punto ω-lımite de la trayectoria ϕ(., x) del sistema (2.20) siexiste una secuencia (tn) tal que lımn → ∞ y
lımn→∞
ϕ(tn, x) = p
De manera analoga, un punto p ∈ U es un punto α-lımite de la trayectoria ϕ(., x) delsistema (2.20), si existe una secuencia (tn) tal que lımn → −∞ y
lımn→∞
ϕ(tn, x) = q

2.6. CICLOS Y ATRACTORES 37
El conjunto de todos los puntos ω-lımite (resp. α-lımite) de una trayectoria Γ se de-nomina conjunto ω-lımite, denotado ω(Γ) (respectivamente conjunto α-lımite denotadoα(Γ)).
Una trayectoria que tiende a una orbita periodica y acaba situandose sobre ella,posee una infinidad de puntos ω-lımite, los que forman la propia orbita periodica.
Considerense los conjuntos lımites ω(Γ) y α(Γ) asociados a una trayectoria Γ de(2.20), que son subconjuntos cerrados de U . Si Γ esta contenida en un subconjun-to compacto de IRn, entonces ω(Γ) y α(Γ) son subconjuntos compactos, no vacıos yconexos de U . Ademas los subconjuntos ω(Γ) y α(Γ) son invariantes bajo el flujo ϕt.
ϕt(ω(Γ)) ⊂ ω(Γ) y ϕt(α(Γ)) ⊂ α(Γ)
Ejemplo
Sea el sistema dinamico no lineal
x1 = x2 + x1(1 − x21 − x2
2) (2.21)
x2 = −x1 + x2(1 − x21 − x2
2)
en coordenadas polares se tiene
ρ = ρ(1 − ρ2)
θ = 1
Del retrato de estados se muestra en la figura 2.9
x1 ’ = x2 + x1 (1 − x12 − x22) x2 ’ = − x1 + x2 (1 − x12 − x22)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
Γ0
Figura 2.8: Retrato de estados del sistema 2.21
El cırculo de radio unidad Γ0 se denomina ciclo (u orbita periodica) estable.

38 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Ademas de los puntos de equilibrio y de los ciclos lımites existen otros conjuntoslımites.
Ejemplo:
Sea el sistema dinamico no lineal
x1 = x2 (2.22)
x2 = x1 + x21
Es facil ver que este sistema dinamico posee dos puntos de equilibrio
x1 = x2 = 0
x1 = −1, x2 = 0
El jacobiano de este sistema dinamico
J =
[0 1
1 + 2x1 0
]
En el primero de los equilibrios el jacobiano toma la forma
J1 =
[0 11 0
]
por lo que se trata de una ensilladura.
En el segundo equilibrio el jacobiano es
J2 =
[0 1−1 0
]
por lo que se trata de un centro.
En la figura siguiente se muestra el retrato de estados de este sistema dinamico.En este retrato de estado convienen observa la curva Γ que es un conjunto lımitedenominado orbita homoclınica, ya que une un punto a sı mismo.
Considerese ahora el sistema dinamico que describe el comportamiento de un pendu-lo no amortiguado:
x1 = x2
x2 = − sin x1

2.6. CICLOS Y ATRACTORES 39
Los equilibrios de este sistema dinamico vienen dado por
x1 = x2 = 0
x1 = ±kπ, x2 = 0
y la matriz jacobiana por
J =
[0 1
− cosx1 0
]En el origen esta matriz toma la forma
J1 =
[0 1−1 0
]
por lo que el origen es un centro.
Por otra parte en los otros equilibrios la matriz jacobiana toma la forma
J2 =
[0 11 0
]
de donde se desprende que se trata de ensilladuras.
El retrato de estados se tiene en la figura siguiente:
x1 ’ = x2 x2 ’ = x1 + x12
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
Γ0
Figura 2.9: Retrato de estados del sistema 2.22
En esta figura conviene observar la curvas Γ1 y Γ2 que representan conjuntos lımitesy que se denominan orbitas heteroclınicas, puesto que unen puntos diferentes. Loscaminos cerrados formados por orbitas heteroclınicas se denominan ciclos homoclınicos.
Atractores

40 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Se dice que K es un atractor si existe un entorno N de K tal que K ⊂ N ⊂ X
lımt→∞
dist(x(t), K) = 0
para todo x ∈ N
El mayor de los N se denomina cuenca de atraccion de K.
Un equilibrio p es asintoticamente estable si p es un atractor.
Lo mismo se dice para un ciclo lımite.
Un subconjunto cerrado A ⊂ U se denomina conjunto atractor de (2.20) si existeun entorno E de A tal que
∀x ∈ E,ϕt(x) ∈ E, ∀t ≥ 0
y∀t ≥ 0, d(ϕt(x), A) → 0, cuando t→ ∞
Un atractor de (2.20) es un conjunto atractor que contenga una orbita tensa.
Conviene observar que todos los puntos ω-lımite no son atractores. Un nodo o unfoco estable son ejemplos de atractores pero una ensilladura no lo es.
2.6.2. Comportamiento a largo plazo de las trayectorias
El “mejorcaso y el mas estudiado es aquel en el que un punto p ∈ X es unatractor:
lımt→∞
x(t) = p
Ejemplos:
• Pendulo con friccion.
• Sistemas mecanicos disipativos con un grado de libertad.
• La mayor parte de las reacciones quımicas.
• Los sistemas electricos lineales con elementos resistivos.
En un orden creciente de complejidad se encuentran los sistemas para los que elconjunto lımite esta formado por equilibrios y ciclos lımite.
ω(x) = equilibrios y/o ciclos lımites
Ejemplos:
• Osciladores de Van der Pol.
• Circuitos electricos no lineales.
2.6. CICLOS Y ATRACTORES 41
2.6.3. Estudio de orbitas periodicas
En este apartado se presentan resultados sobre el analisis de orbitas periodicasen sistemas planos cuando estan lejos de su nacimiento.
Teorema 2.3. Supongase que x = f(x) es un sistema de dimension dos con un numerofinito de equilibrios. Si la orbita positiva γ+(x0) de x0 esta acotada, entonces es ciertaalguna de las siguientes afirmaciones:
El conjunto ω-lımite, ω(x0), es un solo punto xe (es un punto de equilibrio), yϕ(t,x0) → xe cuando t→ +∞.
ω(x0) es una orbita periodica Γ y o γ+(x0) = ω(x0) = Γ o γ+(x0) es una espiralcreciente en el tiempo hacia Γ en un lado de Γ.
ω(x0) son puntos de equilibrio y orbitas cuyos conjuntos α- y ω-lımite son puntosde equilibrio.
Estas tres propiedades son validas para el conjunto α-lımite si γ−(x 0) esta acotada.
Teorema 2.4 (de la curva de Jordan). Una curva cerrada en R2 que no se corta ası misma, separa a R2 en dos partes conexas, una limitada en el interior de la curva yotra no limitada en el exterior.
Una orbita periodica Γ se llama ciclo lımite si hay dos puntos en R2, uno en elinterior de Γ y otro en el exterior, tales que, los conjuntos α- y ω-lımite de las orbitasque pasan por dichos puntos son la orbita periodica Γ.
Teorema 2.5 (de Poincare-Bendixson). Si ω(x0) es un conjunto acotado que no con-tiene puntos de equilibrio, entonces ω(x0) es una orbita periodica.
Para poder utilizar el teorema de Poincare-Bendixson a fin de demostrar la exis-tencia de una orbita periodica no trivial, se construye un conjunto acotado D en R2
que no contiene puntos de equilibrio, y tal que, cualquier solucion que empiece en D,termine en D para todo t ≥ 0, es decir: D es un conjunto invariante positivo abierto ylimitado.
Sea D un subconjunto abierto conexo de R2. Si div f = ∂f1
∂x1+ ∂f2
∂x2es de signo constante
y distinta de cero en D, entonces x = f(x) no tiene orbitas periodicas ni homoclinasque esten por completo en la region D.
42 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
Teorema 2.6 (Criterio de Dulac). Sea D ⊂ R2 un subconjunto abierto simplementeconexo y B(x1, x2) una funcion C1 de valores reales en D. Si la funcion divBf =∂Bf1
∂x1+ ∂Bf2
∂x2es de signo constante y no identica a cero en D., entonces x = f(x) no
tiene orbitas periodicas ni homoclinas que esten por completo en la region D. A lafuncion B se la llama funcion de Dulac.
Sea Γ una orbita periodica que encierra a un espacio abierto U en el que esta definidoel campo vectorial. Entonces U contiene un punto de equilibrio.
Estabilidad de las orbitas periodicas
En este apartado se muestra como realizar el estudio del comportamiento delas orbitas cercanas a una orbita periodica, para determinar su estabilidad, usando laaplicacion de Poincare.
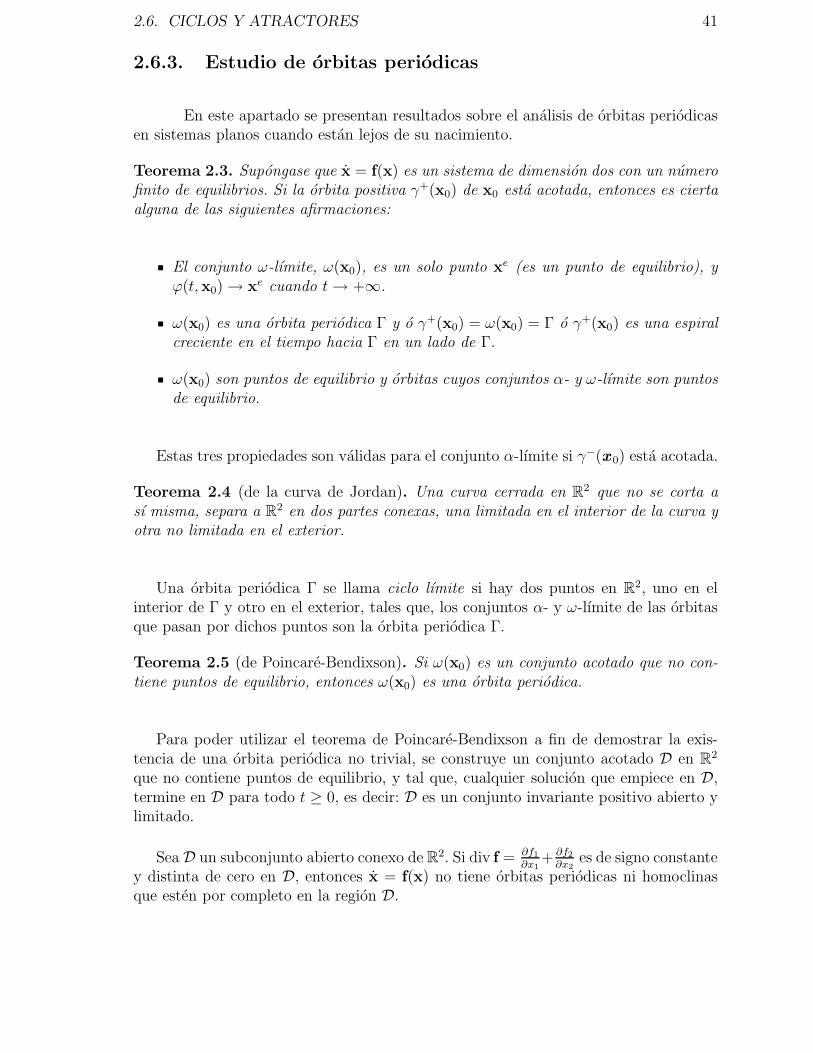
Sea ϕ(t,p) una solucion periodica con mınimo periodo, T , de la ecuacion diferencialx = f(x), representandose la orbita periodica correspondiente por Γ. Se elige un vectorv ∈ R2 tal que, v y el vector tangente f(p) de Γ en p sean linealmente independientes.
Sea Lε el segmento definido por:
Lε = {x ∈ R2 : x = p + av, 0 ≤ |a| ≤ ε},
al que se le denomina seccion transversal de la orbita periodica Γ en el punto p.
A continuacion se define una aplicacion en un subconjunto de Lε inducida por elflujo. Se elige un ε tan pequeno que Lε intersecta a la curva Γ en un solo punto p, yque todas la orbitas que crucen Lε lo hacen en la misma direccion (figura 2.10).
Como ϕ(T,p) = p y sus soluciones dependen de forma continua del valor inicial,hay un δ > 0 tal que, si x0 ∈ Lδ, entonces hay un primer instante T (x0) en el queϕ(T (x0),x0) ∈ Lε.
La aplicacion de Poincare, Π, cerca de una orbita periodica Γ se define como:
Π : Lδ �→ Lε; x0 �→ ϕ(T (x0),x0).
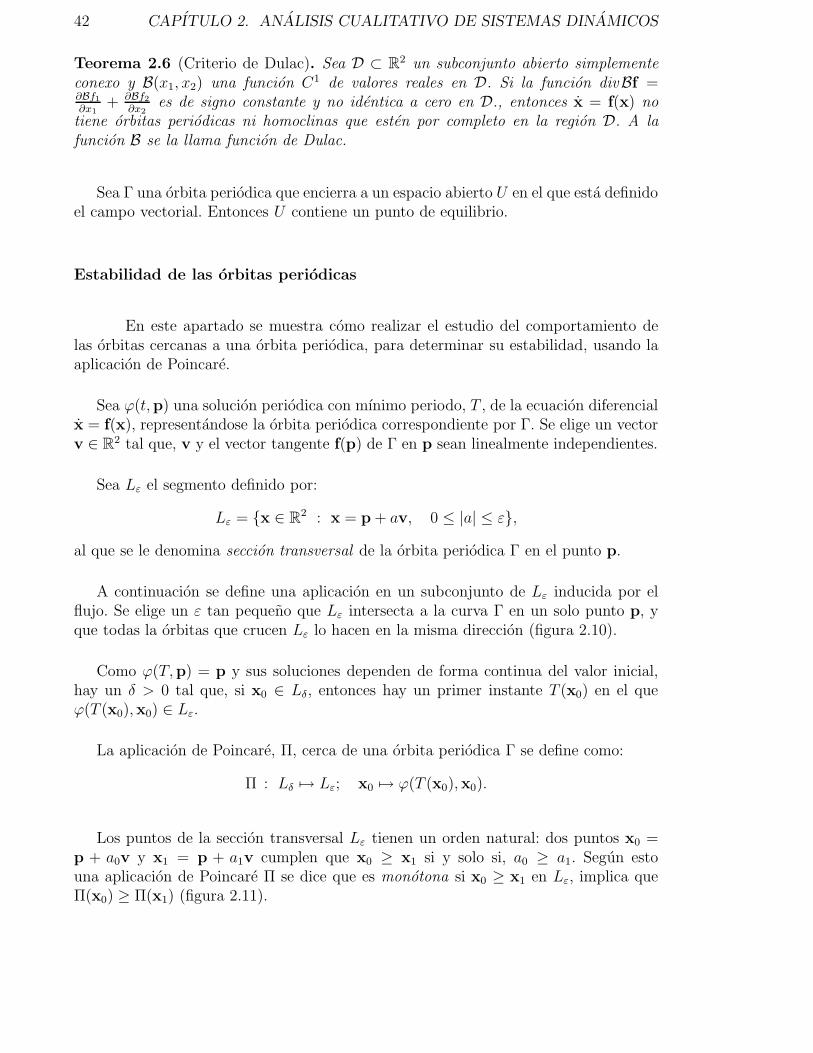
Los puntos de la seccion transversal Lε tienen un orden natural: dos puntos x0 =p + a0v y x1 = p + a1v cumplen que x0 ≥ x1 si y solo si, a0 ≥ a1. Segun estouna aplicacion de Poincare Π se dice que es monotona si x0 ≥ x1 en Lε, implica queΠ(x0) ≥ Π(x1) (figura 2.11).
2.6. CICLOS Y ATRACTORES 43
x0
p
Lε
Γ
Π(x0)
Figura 2.10: Seccion transversal Lε a la orbita periodica Γ y la aplicacion de Poincare.
x0
x1
Π(x0)
Π(x1)
Figura 2.11: Monotonıa de la aplicacion de Poincare.

44 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS
La aplicacion de Poincare tiene las siguientes propiedades:
La aplicacion de Poincare Π cerca de la orbita periodica Γ es una aplicacionmonotona C1.
La orbita γ+(x0) de un punto x0 ∈ Lδ es una orbita periodica si y solo si, es unpunto fijo de la aplicacion de Poincare, es decir, Π(x0) = x0.
La orbita periodica Γ, con p ∈ Γ, es orbital asintoticamente estable si Π′(p) < 1,e inestable si Π′(p) > 1.
La orbita periodica Γ a traves del punto p se dice que es hiperbolica si p es unpunto fijo de la aplicacion de Poincare Π; es decir, si Π′(p) �= 1.
A Π′(p), que en el caso n-dimensional se corresponde con los autovalores de laaproximacion lineal de Π en p, DxΠ(p), se les llama multiplicadores caracterısticos deΓ.
Ası pues, en el caso n-dimensional, la orbita periodica Γ es asintoticamente estable(u orbital asintoticamente estable) si todos sus multiplicadores tienen modulo menorque uno. Si hay algun multiplicador con modulo mayor que uno Γ es inestable.
Sea ϕ(t,p) una solucion periodica de periodo T de la ecuacion diferencial planax = f(x) a traves de p. Entonces:
Π′(p) = exp
{∫ T
0
(∂f1
∂x1
+∂f2
∂x2
)(ϕ(t,p)) dt
}.
2.6.4. Atractores extranos
El peor de los casos es aquel en el que aparecen atractores “extranos”.
Ejemplo de la aplicacion logıstica
fp : [0, 1] → [0, 1] = X
fp(x) = px(1 − x) 0 ≤ p ≤ 4
que puede representarse mediante la figura 12.

2.6. CICLOS Y ATRACTORES 45
Esta aplicacion genera una secuencia tal que
x(t) = fp(...(fp(x0))
que puede interpretarse como se hace en la figura 13.
Se presentan los tres tipos de casos siguientes.
• Para valores pequenos de p : ω(x) = 0 o 1;
• Para valores medios de p : ω(x) = ciclo lımite;
• Para p ≈ 4 :: ω(x) se tiene un comportamiento a largo plazo caracterizadopor la ausencia de pautas. Se trata de un comportamiento oscilatorio noperiodico.
xy
z
Figura 2.12: Ejemplo de atractor extrano (atractor de Lorenz).

46 CAPITULO 2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS

Capıtulo 3
Analisis cualitativo y bifurcacionesen sistemas dinamicos
3.1. Analisis cualitativo de sistemas no lineales
La teorıa cualitativa de sistemas no lineales aporta una perspectiva global de losmodos de comportamiento de un sistema.
Cuando los parametros de un sistema cambian el retrato de estado puede cambiaro no geometricamente de forma significativa.
Si no se produce un cambio significativo entonces el sistema es estructuralmenteestable.
Cambios significativos en el retrato de estados se llaman bifurcaciones.
El concepto de estabilidad estructural es importante para el analisis de incer-tidumbres y robustez.
3.2. Analisis cualitativo de sistemas dinamicos de
dimension 1
Con el fin de precisar las anteriores ideas, vamos a concretarlas aplicandolas al casode sistemas dinamicos de dimension 1. Sea el conjunto de todos los sistemas dinamicos
47

48CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
f(x)
x
x
Figura 3.1: Representacion de f(x) asociada a un sistema dinamico y retrato de estadoscorrespondiente.
definidos en IR. Recordemos que un sistema dinamico esta definido por un espacio deestados X y un campo vectorial f definido sobre X. Sea x = f(x) un sistema dinamicotal que x ∈ (a, b) ⊂ IR. Supongase que f(x) tiene la forma que se indica en la figura3.1a y cuyo retrato de estados sera el de la figura 3.1b.
Conviene observar que la clase de todos los sistemas dinamicos en IR puede conce-birse como la clase de todas las curvas f . Los puntos de equilibrio son los puntos deinterseccion de cada curva f con la recta X.
A cada estado inicial x(0) corresponde una unica trayectoria x(t). Una trayectoriase compone de una parte transitoria y de una permanente llamada atractor (conjuntolımite). Los atractores representan el comportamiento a largo plazo de las trayectorias.El conjunto de estados iniciales que conducen a un mismo atractor forman su cuencade atraccion. Las cuencas de atraccion estan separadas por separatrices.
Debido a las no-linealidades un sistema dinamico puede tener multiples atractores(algunos de los puntos en que f corta a X; los otros seran las separatrices). El espaciode estados se descompone en las cuencas de atraccion de sus distintos atractores. Larepresentacion grafica del mapa de todas las cuencas de atraccion en el espacio deestados se denomina retrato de estados. El retrato de estados aporta una perspectivaglobal de los modos de comportamiento de un sistema.
A cada punto de equilibrio p se asocia su autovalor λ(p) que es la pendiente de fen p. En un entorno a p el sistema dinamico se linealiza mediante el sistema dinamico

3.2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS DE DIMENSION 149
lineal x = λx
Genericamente el corte de f con X sera transversal. Cualquier pequena deforma-cion de este sistema dinamico deja inalteradas las propiedades cualitativas basicas delsistema en el retrato de estados se dice entonces que es estructuralmente estable. Unequilibrio p es estructuralmente estable si λ(p) �= 0.
Supongamos ahora que se aplica una transformacion a x definida por una funciont monotona creciente, x = t(x) tal que conserva las relaciones de orden y topologicas:
x1 > x2 ⇒ x1 > x2; y |x1 − x2| < ε⇒ |x1 − x2| < δ
siendo ε y δ suficientemente pequenos.
El nuevo sistema dinamico es
˙x = t′(x)x t′(x) =dt
dx= t′(t−1(x))f(t−1(x))
= f(x)
Puesto que t′(x) > 0, ∀x ∈ (a, b), es claro que los equilibrios de f seran los mismosen numero y naturaleza que los de f . Ademas, el autovalor de x = f(x) es el mismoque el de ˙x = f(x). La transformacion t puede interpretarse como una deformaciondel espacio X de modo que unas partes se estiren y otras se contraigan, pero sinproducirse nunca un pliegue o un desgarramiento. Lo que se acaba de ver en la anteriortransformacion de x a x es que determinadas propiedades cualitativas de un sistemadinamico permanecen inalteradas. Estas propiedades son el numero de equilibrios y lanaturaleza estable o inestable de cada uno de ellos. Ademas, los valores del autovaloren cada equilibrio tambien permanecen inalterados. Es decir, el retrato de estados esel mismo antes y despues de aplicar la transformacion t. Por tanto, las propiedadescualitativas de (X, f) asociadas al retrato de estados son las mismas que las de (X, f).
Los resultados anteriores admiten formas de generalizacion para cualquier n. En talcaso sucede que los atractores pueden ser de tres tipos: punto de equilibrio (igual quesucedıa en el caso de dimension 1); ciclos lımites (que corresponden a comportamientosperiodicos a largo plazo); y atractores extranos que corresponden a comportamientosaperiodicos o caos. Para un n arbitrario el analisis que acabamos de ver para sistemas dedimension 1 adquiere una notable complejidad adicional. Pero las ideas basicas siguensiendo las mismas.
Sea el conjunto de todos los sistemas dinamicos definidos en IR.
Un sistema dinamico esta definido por el espacio de estados X y un campovectorial f definido sobre X.

50CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
Podemos asociar a todo sistema dinamico en IR una curva
en el retrato de estados de un sistema dinamico conviene resaltar
• multiples equilibrios (atractores);
• cada atractor posee una cuenca de atraccion.
la clase de todos los sistemas dinamicos en IR puede concebirse como la clase detodas las curvas f .
Los puntos de equilibrio seran los puntos de interseccion de cada curva f con larecta X.
Recordemos que un sistema dinamico viene dado por:
dx
dt= f(x), (3.1)
f(x)
x
x
Figura 3.2: Representacion grafica de la funcion f que define un sistema dinamico.
dx
dt= −x, (3.2)
������������������������ ���������������� ���������� ������������ ���������������� ����������������������x
0
Figura 3.3: Campo vectorial asociado al sistema dxdt
= −x.

3.2. ANALISIS CUALITATIVO DE SISTEMAS DINAMICOS DE DIMENSION 151
0-1 1������������ ������ x
Figura 3.4: Campo vectorial asociado al sistema dxdt
= −(x3 − x).
dx
dt= −(x3 − x). (3.3)
A cada atractor se asocia, en el espacio de estados, una cuenca de atraccion, queesta formada por todos aquellos puntos del espacio de estados tales que la trayectoriainiciada en ellos converja al atractor que define la cuenca. En el sistema dinamico(3.3) la cuenca de atraccion del atractor −1 es el semieje negativo; y la del atractor+1, el semieje positivo. Los dos tipos de comportamiento asociados a cada uno de losatractores se reflejan en la figura 3.5. El espacio de estados se divide en las cuencasde atraccion de todos los atractores, separadas entre sı por separatrices. En el sistema(3.3) la separatriz es un punto, el origen.
2
1
0
-1
-20 1 2 3 4 5
t
Figura 3.5: Comportamientos del sistema dx/dt = −(x3 − x).
La representacion grafica del espacio de estados con los diferentes atractores, y suscorrespondientes cuencas de atraccion, recibe la denominacion de retrato de estadoso de fases del sistema dinamico. Constituye una particion del espacio de estados enlas cuencas de atraccion de los distintos atractores que posee un sistema. Suministrauna vision geometrica y global de los modos de comportamiento del sistema, y es elinstrumento basico para su analisis cualitativo. Con su ayuda disponemos de un mapaque reune todos los modos de comportamiento del sistema, organizados mediante suscuencas de atraccion. No nos suministra un comportamiento particular del sistema sinouna vision sintetica de todos. Se comprende su caracter de instrumento basico para elanalisis cualitativo.

52CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
3.2.1. Estabilidad estructural
A cada punto de equilibrio p se asocia su autovalor λ(p) que es la pendiente def en p
En torno a p el sistema dinamico se linealiza x = λx
Genericamente el corte de f con X sera transversal.
Cualquier pequena deformacion de este sistema dinamico deja inalteradas laspropiedades cualitativas basicas del sistema en el retrato de estados ⇒ es estruc-turalmente estable.
Un equilibrio p es estructuralmente estable λ(p) �= 0.
Equilibrios no estructuralmente estables (con λ(p) = 0).
3.3. Familias de sistemas dinamicos
Familia de sistemas dinamicos dependientes del parametro p
x = f(x, p)
A esta familia podemos asociar la imagen geometrica de los retratos de estadosde todos los sistemas dinamicos que la forman, parametrizados por el parametrop.
Si P = IR, entonces X × P puede considerarse como un fibrado de espacios deestado verticales X dispuestos paralelos unos a otros.
Ejemplos
f1(x, p) = −(x− p)
f2(x, p) = x+ p
f3(x, p) = −x3 + p.
Representacion grafica de las familias de sistemas dinamicos f1, f2 y f3.
Bifurcaciones en sistemas dinamicos
dx
dt= f(x, p). (3.4)

3.3. FAMILIAS DE SISTEMAS DINAMICOS 53
familia de sistemas dinamicos
dx
dt= −(x3 + x− p). (3.5)
La figura 3.6 muestra los retratos de estados para distintos valores del parametro p. Enesta figura se tiene una curva que representa el equilibrio del sistema para cada valor dep. En la vertical de cada valor de p se tiene el retrato de estados del sistema dinamicocorrespondiente a ese valor de p (es decir, cada lınea vertical se obtiene girando noventagrados una figura similar a la 3.3, que sera el retrato de estado del sistema con el valorcorrespondiente de p). Se observa que al variar p varıa el punto de equilibrio del sistema,pero la forma del retrato de estados no se altera (solamente se desplaza). La curva dela figura 3.6, no es sino la representacion de x3 + x − p = 0, y se denomina curva deequilibrios de la familia de sistemas dinamicos (3.5). Conviene observar que esta figurase obtiene disponiendo figuras como la 3.3, una al lado de otra, verticalmente, cadauna en el lugar que le corresponde segun el valor del parametro p.
p
x
Figura 3.6: Diagrama de bifurcaciones de la familia de sistemas dinamicos dxdt
= −(x3 +x− p).
Consideremos ahora una nueva familia de sistemas dinamicos:
dx
dt= −(x3 − x− p).
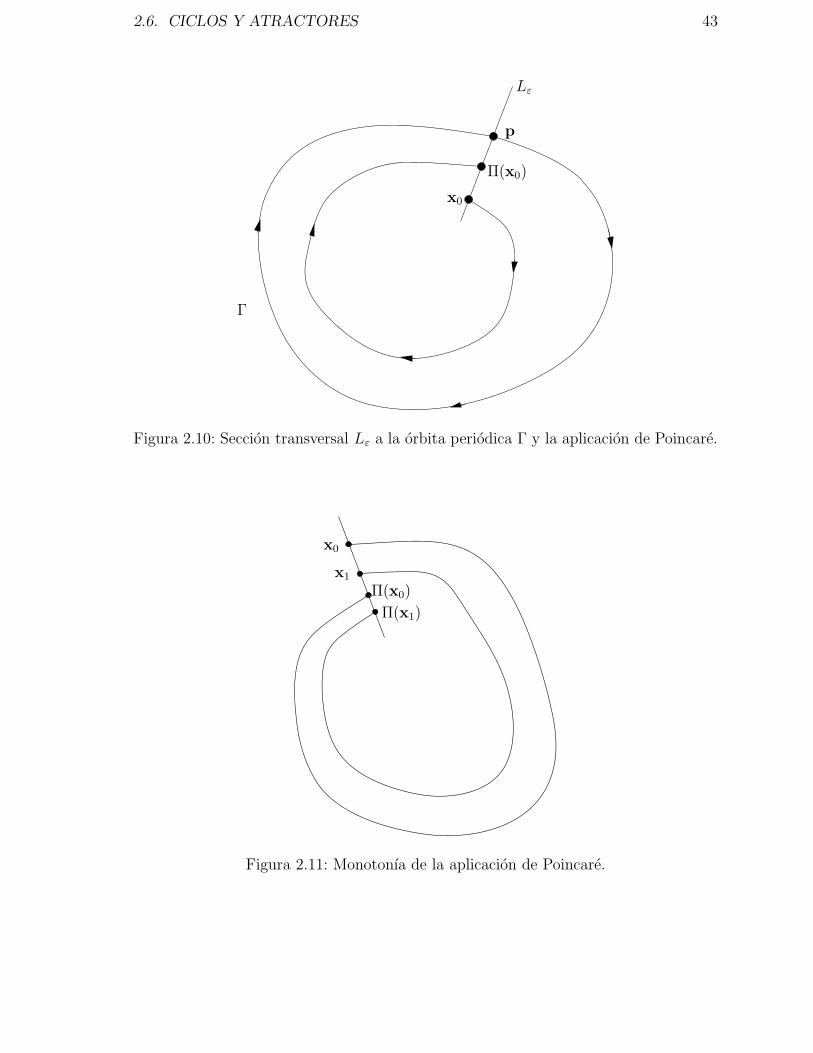
En la figura 3.7 se ha representado su diagrama de bifurcaciones, y el retrato deestados para los distintos valores del parametro p. En esta figura se ha adoptado laconvencion de representar con trazo continuo los equilibrios estables, y con discontinuo

54CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
los inestables. La caracterıstica notable de esta familia es que para diferentes valoresdel parametro p el comportamiento del sistema dinamico puede diferir de una manerasubstancial. Se observa que si p es menor que p1, o mayor que p2, el sistema dinamicoposee un unico atractor (es de la misma forma del que se tenıa en la figura 3.3). Sinembargo, si p esta comprendido entre p1 y p2 entonces el sistema dinamico posee dosatractores y una separatriz (es del mismo tipo del representado en la figura 3.4).
Para los valores p1 y p2 del parametro p se produce una modificacion cualitativa del
p
x
1
p2������p
Figura 3.7: Diagrama de bifurcaciones de la familia de sistemas dinamicos dxdt
= −(x3−x− p).
retrato de estados, ya que el numero de atractores pasa de uno a dos, y aparece, enel segundo caso, un punto separatriz. Los valores p1 y p2 definen los llamados puntosde bifurcacion del sistema dinamico, y constituyen un ejemplo de las bifurcaciones maselementales que se pueden presentar en un sistema dinamico: las catastrofes de pliegue,empleando la terminologıa de la teorıa de catastrofes, o los puntos lımites, en la jergade la teorıa de bifurcaciones. Los puntos de bifurcacion, en este caso concreto, tienenla notable propiedad de que si se varıa el parametro p –de modo que cruce uno delos valores p1 o p2– se produce la aparicion o desaparicion de atractores del sistema;es decir, se ramifican los comportamientos. Por ejemplo, si atravesamos p1 en sentidocreciente del parametro p aparece (de la nada) un par atractor-repulsor. Lo opuestoocurre en p2. Resulta claro que la estructura topologica del retrato de estados (y portanto los modos de comportamiento que presenta el sistema) se modifica al atravesarun punto de bifurcacion.
Es importante observar que el diagrama de bifurcaciones suministra una perspec-tiva global con relacion a todos los modos de comportamiento que pueda presentar

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO55
una familia de sistemas dinamicos (3.4). Al mismo tiempo suministra informacion conrelacion a los valores de los parametros p, para los que el comportamiento del sistemasera robusto ante variaciones de los valores de estos parametros. En efecto, para valoresde p alejados de los puntos de bifurcacion p1 o p2 el comportamiento cualitativo delsistema sera insensible a variaciones de p. Por el contrario, para valores de p cercanosa p1 o a p2, las variaciones de p pueden hacer que se atraviese el punto de bifurcaciony que se produzca la alteracion del retrato de estados del sistema, con la consiguientealteracion de sus modos de comportamiento. Por tanto el diagrama de bifurcacionessuministra informacion respecto a los valores del parametro p para los que el sistemamuestra una especial sensibilidad con relacion a los modos de comportamiento.
3.3.1. Diagramas de bifurcaciones en sistemas no lineales
Los diagramas de bifurcaciones clasifican de manera condensada todos los com-portamientos posible de un sistema y las transiciones entre ellos (bifurcaciones)cuando cambian los parametros del sistema.
Los diagramas de bifurcaciones estan compuestos por un numero finito de regionesreparadas por los lımites de bifurcacion.
3.4. Bifurcaciones elementales en sistemas de di-
mension uno
En este apartado se presenta el concepto de bifurcacion y se ilustra con ejemplosde las bifurcaciones mas usuales y basicas.
La teorıa de bifurcaciones se centra en el estudio de posibles cambios en la estructurade las orbitas de una ecuacion diferencial ante la variacion de una serie de parametrosdel los que esta depende.
En efecto, sea una ecuacion diferencial con un parametro variable x = f(x, c).Representando f(x, c) frente a x, se tiene un comportamiento distinto dependiendo delvalor del parametro.
En el ejemplo de la figura 3.8, correspondiente al sistema x = x2 + c, se representaf(x) frente a x para distintos valores del parametro c. Puede observarse como, para

56CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
valores positivos del parametro, la ecuacion correspondiente para el calculo de equi-librios f(x, c) = 0 no tiene solucion (no se produce corte entre la curva f(x, c) y eleje de ordenadas x(c > 0)). Si el parametro c es cero se tiene una solucion en x = 0correspondiente a un equilibrio, y si c < 0 existen dos puntos de equilibrio: uno establey el otro inestable, como puede observarse en la representacion del campo vectorial enla figura 3.8.
x(c > 0)
x(c = 0)
x(c < 0)
f(x)
Figura 3.8: Representacion de la ecuacion x = x2+c, con su campo vectorial, en funciondel parametro c. Cambios en el parametro c significan desplazamientos verticales deleje de ordenadas.
Para obtener la direccion del flujo o su proyeccion sobre el eje x (campo vectorial),puede integrarse la ecuacion en x y representar su sentido creciente o decreciente.
Para una ecuacion diferencial escalar x = f(x), los puntos de equilibrio y el signo def(x) entre ellos determinan el numero de orbitas y la direccion del flujo de las mismas.A esto se le llama estructura de orbitas o estructura cualitativa del flujo.
Una ecuacion diferencial que depende de un parametro dado se dice que tiene es-tructura de orbitas estables para un valor del mismo, si la estructura cualitativa delflujo no cambia para pequenas variaciones del parametro.
El valor de bifurcacion es el valor del parametro para el cual el flujo no presentauna estructura de orbitas estables. En ese caso se dice que la ecuacion esta en un puntode bifurcacion.
En el ejemplo de la figura 3.8, el sistema presenta una estructura de orbitas establespara cualquier valor del parametro c �= 0, siendo c = 0 un punto de bifurcacion.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO57
Ademas del metodo grafico de representacion de f(x, c) frente a x para distintosvalores del parametro, existe otro metodo muy util para describir las caracterısticasdinamicas en ecuaciones x = f(x, c) que dependen de un parametro c. Este metodoconsiste en representar en el plano (c, x) los valores de equilibrio para cada valor dec, representando, mediante una lınea continua los puntos de equilibrio estables, y conuna discontinua los inestables. A esta representacion grafica se le llama diagrama debifurcaciones.
En la figura 3.9 se muestra el diagrama de bifurcaciones del sistema de la figura 3.8,que corresponde a una bifurcacion silla-nodo, que se caracteriza por la aparicion paraun determinado valor del parametro de dos puntos de equilibrio, uno estable y el otroinestable.
xe
c
Figura 3.9: Diagrama de bifurcaciones de la bifurcacion silla-nodo correspondiente a lafigura 3.8.
A continuacion se presentan, mediante su diagrama de bifurcacion y representaciondel flujo, las bifurcaciones mas habituales en sistemas dinamicos escalares autonomos.Ademas de la bifurcacion silla-nodo antes descrita se pueden caracterizar las siguientesbifurcaciones:
Bifurcacion transcrıtica
Sea la ecuacion diferencial dependiente del parametro c:
x = x2 + cx.

58CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
En la figura 3.10 se representa el retrato de fases del sistema para distintos valoresdel parametro c. Puede observarse en la figura como, para valores negativos de c,el sistema presenta un equilibrio asintoticamente estable en xe = 0 y uno estable enxe = −c. Para c = 0 el sistema pasa a tener un unico punto de equilibrio no hiperbolicoen xe = 0. Si c es positivo, entonces el sistema vuelve a tener dos puntos de equilibrio:uno asintoticamente estable en xe = −c y uno inestable en xe = 0.
f(x, c)
x
c < 0.
f(x, c)
x
c = 0.
f(x, c)
x
c > 0
Figura 3.10: Retrato de estados del sistema x = x2 + cx para distintos valores de c.
Por lo tanto, y de acuerdo con la notacion adoptada, el diagrama de bifurcacionescorrespondiente a la bifurcacion transcrıtica es el representado en la figura 3.11.
Histeresis
La bifurcacion tipo histeresis puede observarse a partir de un sistema dinamicoque tenga como ecuacion:
x = c+ x− x3.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO59
xe
c
Figura 3.11: Diagrama de bifurcaciones de la bifurcacion transcrıtica.
La variacion del parametro de bifurcacion c se corresponde con un desplazamientovertical del eje de ordenadas x en la representacion de f(x, c) en funcion de x, comopuede observarse en la figura 3.12.
f(x, c)
x(c = 23√
3)
x(c = 0)
x(c = −23√
3)
Figura 3.12: Retrato de estados del sistema de ecuacion x = c + x+ x3 para distintosvalores de c.
El flujo del sistema presenta una estructura de orbitas estable que se correspondecon un equilibrio estable para valores del parametro c < −2
3√
3. Si se aumenta c, para
el valor c = −23√
3el sistema tiene un punto de bifurcacion, manteniendo el punto de
equilibrio estable y apareciendo uno no hiperbolico. Para valores de c en el intervalo( −2
3√
3, 2
3√
3), el sistema vuelve a tener estructura de orbitas estable, con un equilibrio
inestable y dos estables. En c = 23√
3se presenta otro punto de bifurcacion y para
valores de c superiores vuelve a tener un solo equilibrio estable.

60CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
El diagrama de bifurcaciones correspondiente a esta bifurcacion puede verse en lafigura 3.13, donde se observa por que se denomina histeresis, ya que el sistema tieneun comportamiento diferente al aumentar c del que presenta al disminuirlo.
xe
c
Figura 3.13: Diagrama de bifurcaciones correspondiente a una bifurcacion tipo histere-sis.
Este tipo de bifurcaciones tambien pueden interpretarse como dos bifurcacionessilla-nodo de equilibrios, una para c = 2
3√
3, y la otra para c = −2
3√
3.
Bifurcacion tridente
Supongase el sistema dinamico descrito por la ecuacion:
x = dx− x3. (3.6)
La variacion del parametro d afecta a la pendiente de la funcion cubica centrada enel origen.
De la ecuacion (3.6) se obtiene facilmente que el sistema presenta tres puntos deequilibrio cuando el parametro d es positivo, mientras que presenta uno solo cuando esnegativo. En el punto d = 0 los tres equilibrios se unen en uno, siendo este un puntode bifurcacion.
En la figura 3.14 puede verse como, para valores de d < 0, el sistema tiene unequilibrio asintoticamente estable en el origen. Al ir aumentando d, la pendiente de

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO61
la cubica se va haciendo cada vez mas pequena hasta que en d = 0 se hace nula,transformandose el equilibrio en uno no hiperbolico. Para valores de d > 0 el sistematiene tres equilibrios, uno inestable en el origen y los otros dos asintoticamente estables.
f(x, c)
x
d < 0.
f(x, c)
x
d = 0.
f(x, c)
x
d > 0
Figura 3.14: Retrato de estados del sistema x = dx− x3 para distintos valores de d.
El diagrama de bifurcaciones correspondiente a la bifurcacion tridente supercrıticaes el que se muestra en la figura 3.15.
En este punto es necesario definir el concepto de bifurcacion supercrıtica y sub-crıtica que sera aplicable al resto de las bifurcaciones que se caracterizan en el presentedocumento.
Se dice que un sistema dinamico presenta una bifurcacion supercrıtica cuando, enel caso de que exista un equilibrio aislado, los equilibrios adicionales que aparecen en elpunto de bifurcacion existen para valores en los que el equilibrio original es inestable.
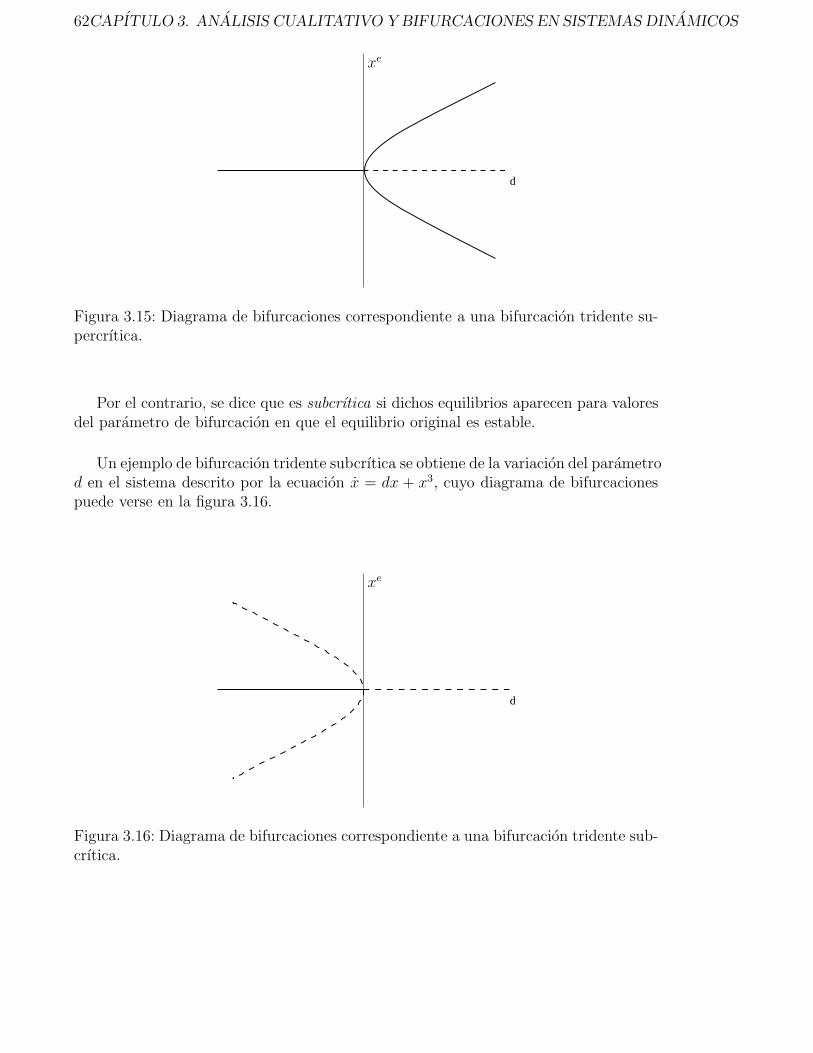
62CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
d
xe
Figura 3.15: Diagrama de bifurcaciones correspondiente a una bifurcacion tridente su-percrıtica.
Por el contrario, se dice que es subcrıtica si dichos equilibrios aparecen para valoresdel parametro de bifurcacion en que el equilibrio original es estable.
Un ejemplo de bifurcacion tridente subcrıtica se obtiene de la variacion del parametrod en el sistema descrito por la ecuacion x = dx + x3, cuyo diagrama de bifurcacionespuede verse en la figura 3.16.
d
xe
Figura 3.16: Diagrama de bifurcaciones correspondiente a una bifurcacion tridente sub-crıtica.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO63
Pliegue o cuspide
Esta bifurcacion se corresponde con una combinacion de las bifurcaciones hastaahora caracterizadas. Supongase la ecuacion diferencial cubica:
x = c+ dx− x3 ≡ f(x, c, d), (3.7)
que depende de dos parametros reales: c y d. Observese que, si c = 0, la bifurcacionque se produce al variar d es una bifurcacion tridente; mientras que, si d = 0, se esta enel caso de una bifurcacion tipo histeresis dependiente de c.
Este sistema presenta una bifurcacion de codimension dos, puesto la existencia dela misma depende de dos parametros.
Para realizar el estudio de este sistema en primer lugar hay que hallar los puntosde bifurcacion. En dichos puntos el sistema ha de tener puntos de equilibrio multiples,es decir, se han de cumplir las ecuaciones:
f(x, c, d) = 0
∂
∂xf(x, c, d) = 0.
Aplicando estas ecuaciones al sistema (3.7) y resolviendolas, eliminando la variablex, se obtiene que el sistema tiene un punto de equilibrio multiple si se cumple laecuacion de una cuspide:
4d3 = 27c2
En la figura 3.17 se representa la ecuacion de la cuspide en el plano (c, d), quedelimita las distintas regiones donde la estructura cualitativa del flujo es diferente.En dicha figura se muestra tambien, de forma esquematica, dicho comportamientocualitativo, representando la funcion f(x, c, d) en funcion de la variable x, indicando encada caso el numero de equilibrios y su estabilidad definida por la direccion del campovectorial.
El diagrama de bifurcaciones correspondiente al sistema es el de la figura 3.18, quecomo puede verse, es una superficie tridimensional en el espacio (c, d, x) con forma depliegue,; de ahı su nombre. La figura inferior de la figura 3.18 se corresponde con laproyeccion de dicha superficie sobre el plano (c, d).

64CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
x
c
d
4d3 = 27c2
Figura 3.17: Representacion de la cuspide del sistema 3.7 en el plano (c, d), ası comolos diferentes retratos de fases del sistema.
c
c
d
d
x
Figura 3.18: Diagrama de bifurcaciones de la bifurcacion pliegue o cuspide en el espacio(c, d, x) y su proyeccion sobre el plano (c, d).

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO65
3.4.1. Bifurcaciones elementales en sistemas dinamicos de di-
mension dos
En este apartado se presentan, de forma resumida, las bifurcaciones elemen-tales en sistemas de dimension dos, algunas de las cuales son una extension de las yacomentadas en los sistemas de dimension uno.
Bifurcacion silla-nodo
Supongase el sistema descrito por:
x1 = λ+ x21
x2 = −x2.
Integrando la segunda ecuacion se obtiene que todas las orbitas del sistema tienden aleje de ordenadas y que la dinamica esta gobernada por la primera ecuacion, que es lamisma que la del caso escalar.
Ası pues, como se ve en la figura 3.19, para λ < 0 el sistema tiene dos equilibrios, unoestable y el otro inestable. El punto de equilibrio inestable es un punto de silla porqueexisten dos orbitas cerca del equilibrio tales que los conjuntos ω-lımite de dichas orbitasson el punto de equilibrio y hay otras dos orbitas cuyo conjunto α-lımite es tambienel equilibrio. El equilibrio estable es un nodo porque el conjunto ω-lımite de todas lasorbitas cerca del equilibrio es el mismo equilibrio.
Cuando λ = 0 ambos equilibrios se unen y desaparecen para λ > 0.
El diagrama de bifurcaciones correspondiente a la bifurcacion silla-nodo es el mismoque en el caso monodimensional y se corresponde con el de la figura 3.9.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ < 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ = 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ > 0
Figura 3.19: Diagrama de fases de la bifurcacion silla-nodo en funcion del parametroλ.

66CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
Bifurcacion tridente
Considerese el sistema descrito por:
x1 = −λx1 − x31
x2 = −x2. (3.8)
Al igual que en el caso de la bifurcacion silla-nodo la dinamica del sistema esta con-trolada por la primera ecuacion. En la figura 3.20 se representa el diagrama de fasesdel sistema para distintos valores de λ.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ < 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ = 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ > 0
Figura 3.20: Diagrama de fases de la bifurcacion tridente en funcion del parametro λ.
El comportamiento cualitativo del sistema en funcion del parametro λ puede re-sumirse diciendo que para valores del parametro λ positivos el sistema presenta solo unequilibrio estable en el origen, al cambiar de signo λ aparecen dos nuevos equilibriosestables inestabilizandose el origen. Ası pues el comportamiento del sistema es simi-lar al del diagrama de bifurcaciones 3.15 correspondiente a una bifurcacion tridentesupercrıtica.
Bifurcacion vertical
Considerese la perturbacion del oscilador armonico:
x1 = λx1 + x2
x2 = −x1 + λx2. (3.9)
Para su estudio se realiza el cambio de coordenadas del sistema a coordenadas polares,con lo que el sistema es equivalente al desacoplado:
r = λ r
θ = −1.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO67
Cuando λ < 0 las soluciones del sistema corresponden a espirales en el sentido delas agujas del reloj y que confluyen en el origen a medida que aumenta t, por lo que elorigen es un punto de equilibrio estable tipo sumidero. Para λ = 0 todas las solucionesson periodicas, por lo que el origen es un centro. Si λ > 0 las soluciones vuelven a serespirales girando en el sentido de las agujas del reloj que parten del origen y se alejande el a medida que aumenta t. Ası pues, como puede verse en la figura 3.21, el valorλ = 0 es un valor de bifurcacion.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ < 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1x
2
λ = 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ > 0
Figura 3.21: Diagrama de fases de la bifurcacion vertical en funcion del parametro λ.
Bifurcacion de Poincare-Andronov-Hopf
Es conocida habitualmente como bifurcacion de Hopf y es una de las mashabituales en sistemas no lineales. Puede estudiarse a traves del sistema descrito por:
x1 = x2 + x1(λ− x21 − x2
2)
x2 = −x1 + x2(λ− x21 − x2
2).
Transformando de nuevo a coordenadas polares el sistema queda:
r = r(λ− r2)
θ = −1.
Cuando λ ≤ 0 las soluciones son una espiral en el sentido de las agujas del relojque confluyen en el origen a medida que aumenta t. Para λ > 0 el origen se vuelveinestable y aparece una orbita periodica de radio r =
√λ de manera que todas las
orbitas evolucionan hasta ella cuando t aumenta. Ası pues, el conjunto ω-lımite ω(x0)de cualquier orbita es una orbita periodica si x0 �= 0.
En la figura 3.22 se representa el diagrama de fases del sistema con los dos compor-tamientos cualitativos distintos.
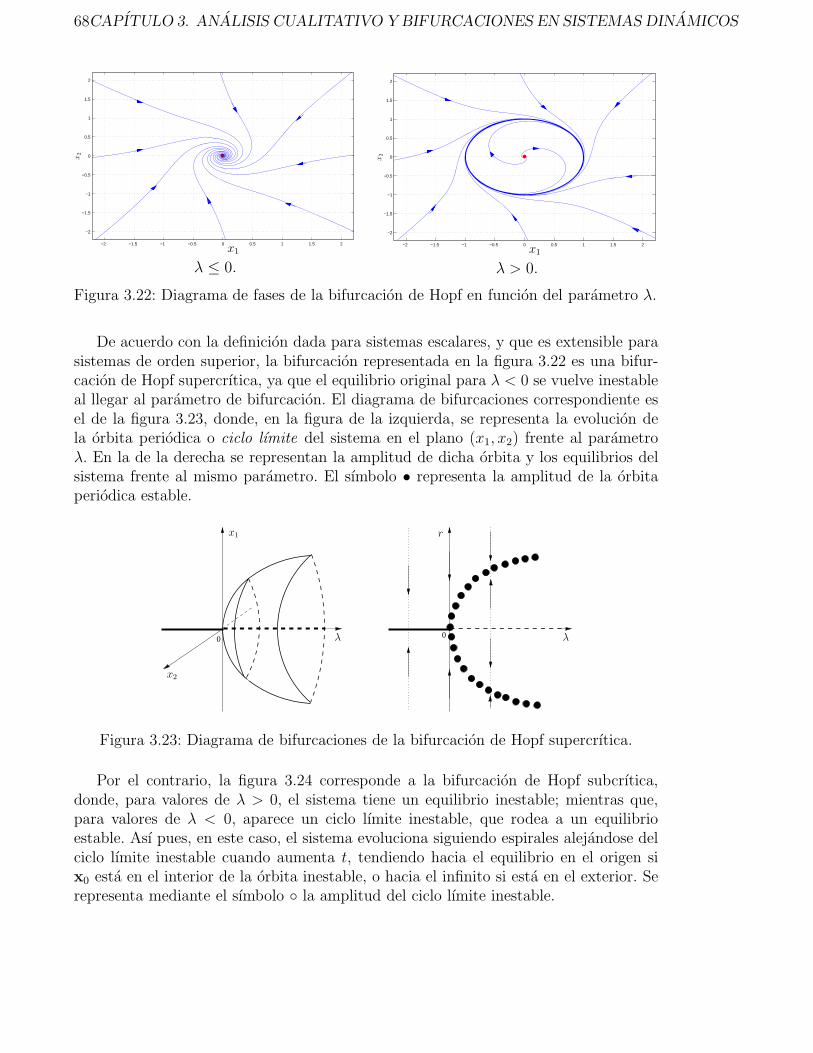
68CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ ≤ 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
λ > 0.
Figura 3.22: Diagrama de fases de la bifurcacion de Hopf en funcion del parametro λ.
De acuerdo con la definicion dada para sistemas escalares, y que es extensible parasistemas de orden superior, la bifurcacion representada en la figura 3.22 es una bifur-cacion de Hopf supercrıtica, ya que el equilibrio original para λ < 0 se vuelve inestableal llegar al parametro de bifurcacion. El diagrama de bifurcaciones correspondiente esel de la figura 3.23, donde, en la figura de la izquierda, se representa la evolucion dela orbita periodica o ciclo lımite del sistema en el plano (x1, x2) frente al parametroλ. En la de la derecha se representan la amplitud de dicha orbita y los equilibrios delsistema frente al mismo parametro. El sımbolo • representa la amplitud de la orbitaperiodica estable.
00
x1
x2
λ λ
r
Figura 3.23: Diagrama de bifurcaciones de la bifurcacion de Hopf supercrıtica.
Por el contrario, la figura 3.24 corresponde a la bifurcacion de Hopf subcrıtica,donde, para valores de λ > 0, el sistema tiene un equilibrio inestable; mientras que,para valores de λ < 0, aparece un ciclo lımite inestable, que rodea a un equilibrioestable. Ası pues, en este caso, el sistema evoluciona siguiendo espirales alejandose delciclo lımite inestable cuando aumenta t, tendiendo hacia el equilibrio en el origen six0 esta en el interior de la orbita inestable, o hacia el infinito si esta en el exterior. Serepresenta mediante el sımbolo ◦ la amplitud del ciclo lımite inestable.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO69
0 0
x1
x2
λλ
r
Figura 3.24: Diagrama de bifurcaciones de la bifurcacion de Hopf subcrıtica.
En ambos casos se produce la perdida de estabilidad del equilibrio para λ = 0,en el supuesto de que el parametro crezca. En la bifurcacion supercrıtica el equilibrioestable se reemplaza por un ciclo lımite estable de pequena amplitud. Por consiguiente,el sistema permanece en un entorno del equilibrio y se tiene una perdida de estabilidadsuave o no catastrofica.
En el caso de la bifurcacion subcrıtica la region de atraccion del punto de equilibrioesta acotado por un ciclo lımite inestable (tiene una cuenca de atraccion limitada)que se comprime cuando el parametro se acerca al valor crıtico y que desaparece alalcanzarlo. Entonces el sistema (las trayectorias) es lanzado fuera del equilibrio, por loque se tiene una perdida de estabilidad dura o catastrofica.
Si la perdida de la estabilidad del sistema se produce de una manera suave entoncesel sistema es controlable”, ya que si se cambia el signo del parametro el sistema vuelve alequilibrio anterior. Por el contrario, si el sistema sufre una perdida de estabilidad dura,al devolver los valores del parametro a valores negativos no se producira un retornoal equilibrio anterior ya que normalmente el sistema habra abandonado su cuenca deatraccion. Conviene observar que el tipo de la bifurcacion de Andronov-Hopf vienedeterminado por la estabilidad del equilibrio para el valor crıtico del parametro.
Por ultimo, debe analizarse que sucede si se prescinde de los terminos no linealesen los dos sistemas. En este caso ya no existen ciclos lımites ni antes ni despues delvalor crıtico del parametro. Para el valor crıtico del parametro λ = 0 el sistema poseeun centro en el origen. Esta observacion vuelve a poner de manifiesto la importanciade los terminos no lineales para la aparicion de ciclos lımites, a la que ya se aludio an-teriormente.

70CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
3.4.2. Evolucion de los autovalores en una bifurcacion de Hopf.
x = −(ε+ (x2 + y2))x− yω
y = −(ε+ (x2 + y2))y + xω
dx
dt= Ax
en donde A es la matriz
A =
( −ε −ωω −ε
)cuyos autovalores son λ = −ε±jω. La bifurcacion de Hopf se produce cuando unpar de autovalores complejos conjugados cruzan el eje imaginario con velocidadno nula.
3.4.3. Bifurcaciones de orbitas periodicas
En este apartado se describen dos de las bifurcaciones mas habituales rela-cionadas con orbitas periodicas, ademas de la de Hopf ya estudiada con anterioridad.
Bifurcacion silla-nodo de orbitas periodicas
Sea el sistema plano:
x1 = −x1 sen λ− x2 cosλ+ (1 − x21 − x2
2)2 (x1 cos λ− x2 senλ)
x2 = x1 cos λ− x2 senλ+ (1 − x21 − x2
2)2 (x1 sen λ+ x2 cosλ),
que depende de un parametro real λ.
Si se realiza la transformacion a coordenadas polares realizando el cambio de vari-ables x1 = r cos θ y x2 = r sen θ, el sistema queda:
r = r((1 − r2)2 cosλ− senλ)
θ = (1 − r2)2 sen λ+ cosλ. (3.10)
Como la primera ecuacion del sistema (3.10) es independiente de θ, y ademas el sis-tema experimenta una bifurcacion silla-nodo en la direccion radial cuando el parametroλ pasa por cero.

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO71
Si λ > 0, y es suficientemente pequeno, el sistema tiene dos orbitas periodicas: unainestable x2
1 +x22 = 1+
√tanλ que es una circunferencia de radio mayor que uno y una
estable x21 + x2
2 = 1−√tanλ que es tambien una circunferencia pero con radio inferior
a uno (figura 3.26c).
En el caso en que λ = 0, tiene una orbita periodica simple no hiperbolica inestableen x2
1 + x22 = 1 (figura 3.26b).
Si λ < 0, el sistema no tiene orbitas estables ya que r > 0 y todas las soluciones,excepto el origen, van al infinito cuando t→ +∞ (figura 3.26a).
Este es el comportamiento cualitativo correspondiente a una bifurcacion silla-nodode orbitas periodicas (en el punto de bifurcacion, λ = 0, aparecen dos ciclos lımite, unoestable y otro inestable). Sin embargo, en este sistema se producen dos bifurcacionesademas de la ya citada [Sal95].
Una vez se ha producido la bifurcacion silla-nodo de orbitas periodicas, al aumentarel valor de λ, la amplitud del ciclo lımite inestable va aumentando, hasta que en elpunto λ = π
4se produce una bifurcacion de Hopf subcrıtica en el infinito [Glo89],
[LP97], [LP98], desapareciendo dicho ciclo lımite y cambiando el tipo de estabilidaddel infinito (a efectos practicos en el analisis de bifurcaciones el infinito puede sertomado como un punto).
Por otra parte, al aumentar el valor de λ, la amplitud del ciclo lımite estable dis-minuye, hasta que se produce una bifurcacion de Hopf supercrıtica en el origen para elvalor λ = π
2.
En la figura 3.26 se muestra el comportamiento del sistema para distintos valoresde λ y en la figura 3.25 se representa el correspondiente diagrama de bifurcaciones.
Bifurcacion homoclina
Sea el sistema plano:
x1 = 2x2
x2 = 2x1 − 3x22 − x2(x
31 − x2
1 + x22 − c)
donde c es un parametro escalar.
A fin de detectar la bifurcacion homoclina se analiza el sistema para pequenasvariaciones de c cercanas a cero.

72CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
SNOP
‖x‖
λπ4
π2
H∞
H0
Figura 3.25: Diagrama de bifurcaciones correspondiente a la bifurcacion silla-nodo de orbitas periodicas (SNOP≡ Bifurcacion silla-nodo de orbitas periodicas;H∞ ≡Bifurcacion de Hopf en el infinito; H0 ≡ Bifurcacion de Hopf en el origen).
Para todos los valores de c hay dos puntos de equilibrio: uno en el origen, que essiempre una silla, y otro en (2/3, 0), que es inestable si c > −4/27.
Para estudiar los detalles del diagrama de fases del sistema se toma la funcionV (x1, x2) = x3
1 − x21 + x2
2 y se analiza su derivada a lo largo de las soluciones delsistema, para obtener:
V (x1, x2) = −2x22(x
31 − x2
1 + x22 − c).
Para −4/27 < c < 0, usando el principio de invarianza, se aprecia que existe unaorbita periodica asintoticamente estable en la curva x3
1 − x21 + x2
2 − c = 0, con x1 > 0(que proviene de una bifurcacion de Hopf en el punto (2/3, 0) para c = −4/27) (figura3.27a).
Cuando c → 0 la orbita periodica se aproxima a la curva homoclina que pasa porel origen (figura 3.27b). Para c > 0, la curva homoclina se rompe y no hay orbitasperiodicas (figura 3.27c).
3.4.4. Bifurcaciones de codimension dos
Hasta el momento, en las secciones anteriores, todas las bifurcaciones que se hancaracterizado (excepto la de pliegue en sistemas escalares) se pueden obtener mediantela variacion de un solo parametro (y cualquier sistema que presenta dichas bifurcacioneses local topologicamente equivalente a los que se han usado para describirlas). Por ellose dice que estas bifurcaciones son de codimension uno, entendiendo el concepto de

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO73
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(a) λ < 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(b) λ = 0.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(c) 0 < λ < π4.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(d) π4< λ < π
2.
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x1
x2
(e) λ > π2
Figura 3.26: Diagrama de fases de la bifurcacion silla-nodo de orbitas periodicas enfuncion del parametro λ.

74CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
x ’ = 2 y y ’ = 2 x − 3 x2 − y (x3 − x2 + y2 − c)
c = − 0.05
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(a).
x ’ = 2 y y ’ = 2 x − 3 x2 − y (x3 − x2 + y2 − c)
c = 0
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(b).
x ’ = 2 y y ’ = 2 x − 3 x2 − y (x3 − x2 + y2 − c)
c = 0.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x1
x2
(c).
Figura 3.27: Diagrama de fases de la bifurcacion homoclina en funcion del parametroc.
codimension de una bifurcacion como el numero mınimo de parametros en una familiade sistemas necesarios para reproducir la bifurcacion.
En este apartado se presenta una de las bifurcaciones de codimension dos masusuales en el estudio de sistemas dinamicos.
Bifurcacion de Takens-Bogdanov
Supongase un campo vectorial plano que depende de dos parametros, tal que,tiene un punto de equilibrio para determinados valores de los parametros, que se suponeque es no hiperbolico con dos autovalores cero pero con un autovector.
Si hay algun campo vectorial que cumpla las condiciones anteriores, entonces es local

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO75
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������
���������������������������������������
���������������������������������������
1
2 3
4
H
SNa
SNbCH
λ1
λ2
Figura 3.28: Conjunto de bifurcaciones correspondiente a la bifurcacion Takens-Bogdanov (SN ≡Bifurcacion silla-nodo de equilibrios; H ≡Bifurcacion de Hopf;CH ≡Conexion homoclina).
topologicamente equivalente a uno de los dos sistemas que dependen de dos parametros:
x1 = x2
x2 = λ1 + λ2x1 + x21 ± x1x2. (3.11)
Ası pues, hay un cambio de variables (con jacobiano distinto de cero) y un home-omorfismo (que depende de los parametros de forma continua) en un entorno suficien-temente pequeno del origen que transforma las orbitas de cualquier sistema plano conlas propiedades descritas anteriormente a las orbitas del sistema (3.11) en un entornodel origen, preservando la direccion en el tiempo.
El conjunto de bifurcaciones del sistema (3.11) es el que se muestra en la figura 3.28.En esta figura tambien se muestra de forma esquematica el comportamiento cualitativodel sistema en las distintas zonas delimitadas por las lıneas de bifurcacion.
Si se parte de la zona 3 del diagrama de bifurcaciones, al atravesar la curva SNa, seproduce una bifurcacion silla-nodo de equilibrios en la que surgen dos equilibrios: unoestable y otro inestable tipo silla, quedando el sistema en la zona 2.

76CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
Si, por el contrario, se atraviesa la curva SNb, correspondiente a otra bifurcacionsilla-nodo de equilibrios, el sistema queda con dos equilibrios inestables: uno tipo focoy otro tipo silla, en la zona 4.
A continuacion, si se disminuye el parametro λ1 con λ2 < 0, al hacerse λ1 = 0, seproduce una bifurcacion de Hopf subcrıtica en el punto de equilibrio inestable tipo foco,llegandose a la zona 1 en la que el sistema presenta un ciclo lımite inestable alrededorde un equilibrio estable, y una silla en el exterior.
Al disminuir el parametro λ1, manteniendo λ2 constante, la amplitud del ciclo lımiteaumenta hasta chocar con el punto de silla en una conexion homoclina, desapareciendoy quedando el sistema con el comportamiento descrito en la zona 2.
3.4.5. Diagrama de bifurcaciones del experimento de Taylor-Couette.
Volviendo ahora al modelo de crecimiento sigmoidal de una poblacion (2.1), es claroque x = 0 es un punto de equilibrio del sistema para todos los valores de m y de n,

3.4. BIFURCACIONES ELEMENTALES EN SISTEMAS DE DIMENSION UNO77
pero que ademas se tienen equilibrios adicionales en las soluciones en x a la ecuacion
g(x) − p = 0, siendo p =m
n.
Recordando la forma de g de la figura 2.3, es facil ver que la anterior ecuacion conducea dividir el rango de los valores positivos de p en tres regiones con diferente compor-tamiento cualitativo (figura 3.29). Para p ∈ [0, 1) existe un nuevo equilibrio x+
e , ademasde x = 0. Para p ∈ (1, p∗), ademas del equilibrio x+
e se tiene otro x−e . Por ultimo, parap > p∗ no existen equilibrios adicionales al x = 0. Por tanto para p = p∗ se produce lacoalescencia y desaparicion de los equilibrios x+
e y x−e . Es normal tomar el parametrop como el parametro natural para el estudio de bifurcaciones.
Al estudiar las bifurcaciones del modelo de crecimiento logıstico, o en general deun modelo de crecimiento por balance entre nacimientos y muertes, se esta estudiandocomo cambia cualitativamente el comportamiento del modelo como consecuencia de lasvariaciones en la tasa de natalidad n y de mortalidad m. Estas variaciones se puedendeber a fenomenos de naturaleza muy variada. Por ejemplo, si se esta estudiando elcrecimiento de una poblacion humana las variaciones de m y de n pueden debersea cuestiones tales como el progreso en la sanidad publica (en cuyo caso al menosdisminuye m) o a otras cuestiones como puede ser una epidemia o una guerra. Estasvariaciones de m y de n daran lugar a las de p. Mediante el analisis de bifurcacionesse puede analizar como influiran estas variaciones en el comportamiento a largo plazodel modelo. En cualquier caso conviene observar que el modelo de crecimiento logısticoes muy general y se aplica no solo a crecimiento de poblaciones, sino tambien en otroscontextos. Por ejemplo, se habla de tasa de natalidad y de mortalidad de empresas,en cuyo caso el modelo ? representa el crecimiento de la actividad economica comoconsecuencia de la creacion (nacimiento) de empresas y de su desaparicion o cierre.
La linealizacion del sistema dinamico (2.1) es J(x) = ng(x) −m+ nxg′(x), que encada equilibrio se convierte en
J(0) = n−m = n(1 − μ),
J(x+e ) = nx+
e g′(x+
e ) < 0,
J(x−e ) = nx−e g′(x−e ) > 0.
Mediante esta linealizacion se determina la estabilidad de cada uno de los equilibrios.
En la figura 3.29 se tienen los equilibrios y las bifurcaciones del modelo (2.1). Eneste diagrama se resumen los resultados relativos a los equilibrios, y su estabilidad,en funcion del parametro p. De acuerdo con este diagrama se tiene dos puntos debifurcacion. Para p = 1 se tiene una bifurcacion transcrıtica en la que se produce uncambio de estabilidad entre el equilibrio x = 0 (inestable para p < 1 y estable parap > 1) y el equilibrio emergente x−e , que es inestable para p > 1. Por otra parte, parap = p∗ se produce una bifurcacion nodo-ensilladura que conduce a la coalescencia de

78CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
δ1−2
μ∗
xe xe
ex
+
-
μ
δ1−
1
Figura 3.29: Diagrama de bifurcaciones del modelo logıstico.
xe
xe+
t
xe-
μ < μ∗1 <
xe
tμ μ∗<
xe
xe+
tμ < 1
Figura 3.30: Trayectorias del modelo logıstico: a) p < 1; b) 1 < p < p∗; c) p∗ < p.
los equilibrios x+e y x−e , que desaparecen para p > p∗. Conviene observar que los dos
puntos de bifurcacion mencionados (la bifurcacion transcrıtica y la nodo-ensilladura)dividen el espacio del parametro P en las tres regiones de comportamiento cualitativodiferente, tal como se ha indicado anteriormente.
En la figura 3.30 se muestran las trayectorias en estas tres regiones. Es especialmentenotable la intermedia (para 1 < p < p∗) que muestra dos modos de comportamientosdiferentes, dependiendo de las condiciones iniciales. O bien se produce el crecimiento,que tendra la forma logıstica, o bien se produce el declive hasta la extincion. Los dosequilibrios estables x+
e y 0 son responsables, respectivamente, de esta bimodalidad decomportamientos. El diagrama de bifurcacion muestra como estos comportamientos seorganizan en funcion del parametro del modelo, que en este caso se reduce al parametrop.
Observando el conjunto del diagrama de bifurcacion se tiene que el modelo (2.1)puede mostrar solamente dos modos de comportamiento cualitativamente diferenci-

3.5. CRECIMIENTO LOGISTICO CON UN RETRASO EN LA ESTRUCTURA 79
adas:
crecimiento y estabilizacion; y
declive.
El diagrama de bifurcaciones permite conocer cual de estos dos modos de compor-tamiento seguira el sistema, en funcion del valor que tome el parametro p y, en el casode la region intermedia, de las condiciones iniciales del sistema.
Resulta tambien conveniente observar como el diagrama de bifurcaciones suministrauna perspectiva global con respecto a los modos de comportamiento de un sistema, yconstituye una guıa para realizar simulaciones y determinar trayectorias concretas.
3.5. Crecimiento logıstico con un retraso en la es-
tructura
Una forma mas realista de modelar el crecimiento de una poblacion aconseja incluirun retardo en la tasa de crecimiento, de modo que el sistema dinamico correspondientesea: {
x = x(ng(y) −m),
y = delayτ (x),(3.12)
en donde delayτ (x) representa y(t) = x(t − τ); es decir, la senal y(t) es la senal x(t)retrasada en τ unidades de tiempo. Este modelo posee los mismos equilibrios que el(2.1), ya que el retraso no afecta al comportamiento a largo plazo. En consecuencia,cabrıa esperar unas pautas de comportamiento similares a las de la figura 3.30, quizascon oscilaciones en las trayectorias a los atractores debidas al retraso. Sin embargo,como vamos a ver, no sucede solo eso, y en este caso se presentan otros tipos decomportamiento transitorio, como la catastrofe retrasada, a la que se aludio en laintroduccion.
Un retraso puro, aunque aparentemente sencillo de especificar, resulta difıcil detratar matematicamente, ya que se requiere un sistema de dimension infinita paraello. Sin embargo, es posible obtener aproximaciones aceptables mediante sistemas dedimension finita. Una aproximacion muy empleada en la practica es la de considerar k

80CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
retrasos de primer orden en serie, de modo que el sistema (3.12) se escribe:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x = x(ng(y) −m),
y1 = ka(x− y1),
y2 = ka(y1 − y2),
...
yk−1 = ka(yk−2 − yk−1),
y = ka(yk−1 − y),
siendo a = 1/τ , y τ el retraso que se pretende introducir.
En la region de comportamiento bimodal existen tres equilibrios⎡⎢⎢⎢⎣
00...0
⎤⎥⎥⎥⎦ ,
⎡⎢⎢⎢⎣x+
e
x+e...x+
e
⎤⎥⎥⎥⎦ ,
⎡⎢⎢⎢⎣x−ex−e...x−e
⎤⎥⎥⎥⎦ ∈ Rk+1,
que se denotan por 0, x+e y x−
e .
Por otra parte se tiene que la matriz de linealizacion en un punto generico es
J(x, y1, · · · , y) =
⎡⎢⎢⎢⎢⎢⎣
ng(y) −m 0 · · · 0 nxg′(y)ka −ka · · · 0 0...
......
...0 0 · · · −ka 00 0 · · · ka −ka
⎤⎥⎥⎥⎥⎥⎦
que en cada uno de los tres equilibrios toma la forma
J(0, 0, · · · , 0) =
⎡⎢⎢⎢⎢⎢⎣
n−m 0 · · · 0 0ka −ka · · · 0 0...
......
...0 0 · · · −ka 00 0 · · · ka −ka
⎤⎥⎥⎥⎥⎥⎦
J(x±e , x±e , · · · , x±e ) =
⎡⎢⎢⎢⎢⎢⎣
0 0 · · · 0 nx±e g′(x±e )
ka −ka · · · 0 0...
......
...0 0 · · · −ka 00 0 · · · ka −ka
⎤⎥⎥⎥⎥⎥⎦ .

3.5. CRECIMIENTO LOGISTICO CON UN RETRASO EN LA ESTRUCTURA 81
ex+
H.....
.....HO
ex-
xe
SN
μT
Figura 3.31: Diagrama de bifurcaciones del sistema con retardo.
En consecuencia el polinomio caracterıstico de J(0, 0, · · · , 0) es
(λ− (n−m))(λ+ ka)k
y el de J(x±e , x±e , · · · , x±e ) es
λ(λ+ ka)k − α(ka)k, (3.13)
siendo
α = nx±e f′(x±e ) =
2n
δx±e
(1 − δ
2− x±e
).
Cuando el parametro de bifurcacion p se mueve en (1, p∗) ambos x−e y x+
e puedensufrir una bifurcacion de Hopf, cuando un par de raıces complejas de (3.13) cruzan eleje imaginario.
Un analisis pormenorizado de las bifurcaciones de este sistema puede verse en(Aracil y otros, 1997). Este analisis se resume en el diagrama de bifurcaciones de lafigura 3.31, siendo
SN un punto de bifurcacion nodo-ensilladura.
T un punto de bifurcacion transcrıtica;
H un punto de bifurcacion de Hopf supercrıtica;
HO un punto de bifurcacion homoclina.
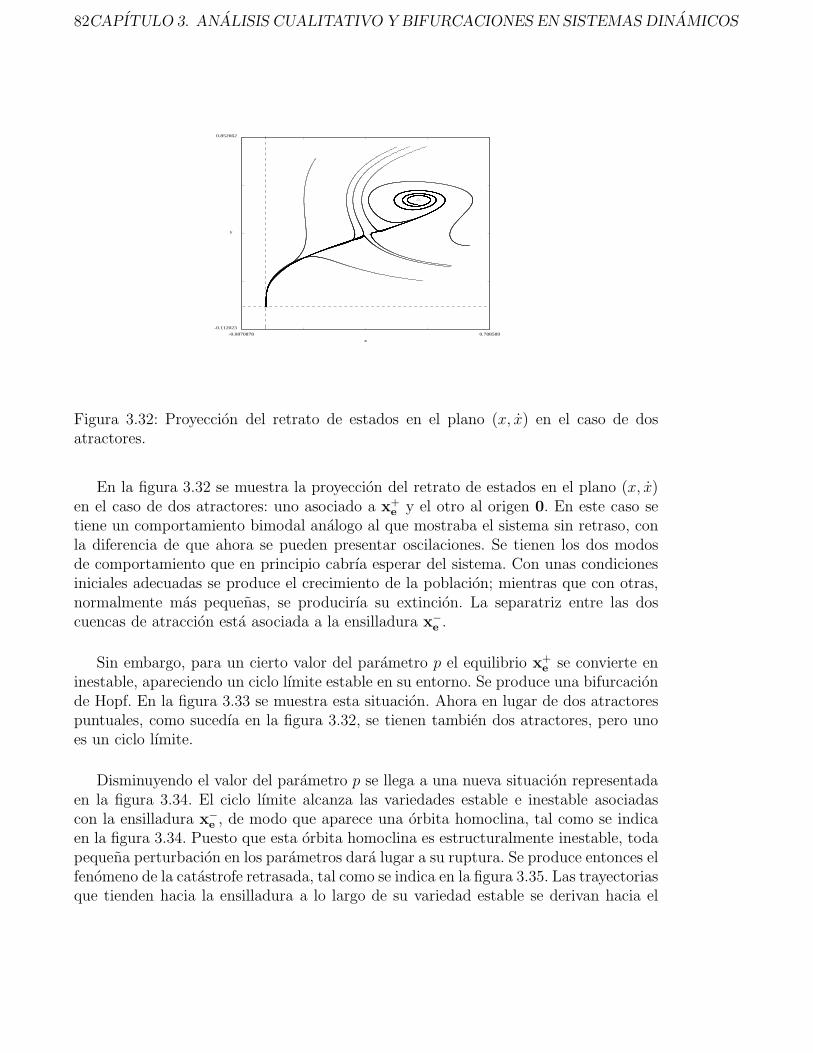
82CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
0.788589-0.0870878
0.852662
-0.112023
x
y
Figura 3.32: Proyeccion del retrato de estados en el plano (x, x) en el caso de dosatractores.
En la figura 3.32 se muestra la proyeccion del retrato de estados en el plano (x, x)en el caso de dos atractores: uno asociado a x+
e y el otro al origen 0. En este caso setiene un comportamiento bimodal analogo al que mostraba el sistema sin retraso, conla diferencia de que ahora se pueden presentar oscilaciones. Se tienen los dos modosde comportamiento que en principio cabrıa esperar del sistema. Con unas condicionesiniciales adecuadas se produce el crecimiento de la poblacion; mientras que con otras,normalmente mas pequenas, se producirıa su extincion. La separatriz entre las doscuencas de atraccion esta asociada a la ensilladura x−
e .
Sin embargo, para un cierto valor del parametro p el equilibrio x+e se convierte en
inestable, apareciendo un ciclo lımite estable en su entorno. Se produce una bifurcacionde Hopf. En la figura 3.33 se muestra esta situacion. Ahora en lugar de dos atractorespuntuales, como sucedıa en la figura 3.32, se tienen tambien dos atractores, pero unoes un ciclo lımite.
Disminuyendo el valor del parametro p se llega a una nueva situacion representadaen la figura 3.34. El ciclo lımite alcanza las variedades estable e inestable asociadascon la ensilladura x−
e , de modo que aparece una orbita homoclina, tal como se indicaen la figura 3.34. Puesto que esta orbita homoclina es estructuralmente inestable, todapequena perturbacion en los parametros dara lugar a su ruptura. Se produce entonces elfenomeno de la catastrofe retrasada, tal como se indica en la figura 3.35. Las trayectoriasque tienden hacia la ensilladura a lo largo de su variedad estable se derivan hacia el

3.5. CRECIMIENTO LOGISTICO CON UN RETRASO EN LA ESTRUCTURA 83
1.05-0.0977844
0.825812
-0.112962
x
y
Figura 3.33: Bifurcacion de Hopf (μ = 2,8, n = 0,1, δ = 0,1 and a = 0,06).
1.29732-0.0951067
0.943976
-0.133629
x
y
Figura 3.34: Orbita homoclina de la ensilladura x−e . (μ = 2,7045, n = 0,1, δ = 0,1 and
a = 0,06.).

84CAPITULO 3. ANALISIS CUALITATIVO Y BIFURCACIONES EN SISTEMAS DINAMICOS
1.4-0.2
0.95
-0.1
x
y
690-30
1.4
-0.2
t
x
(a) (b)
Figura 3.35: Catastrofe retrasada: (a) orbita en el espacio de estados (x, y); (b) pautade comportamiento. (μ = 2,704, n = 0,1, δ = 0,1 and a = 0,06.)
origen dando lugar a la extincion de la poblacion.
Conviene detenerse en la comparacion entre la figura 3.29, en la que se tiene eldiagrama de bifurcacion antes de anadir el retraso, y la figura 3.31, con el correspon-diente diagrama despues de anadirlo. Comparandolas se pone de manifiesto el efectodel retraso en el comportamiento del sistema. En ambas los equilibrios son los mismos,pero en la segunda equilibrios que eran estables en la primera se han convertido en in-estables. Esta inestabilizacion se produce mediante una bifurcacion de Hopf, de modoque emerge un ciclo lımite estable. A partir de esta emergencia se genera la apariciondel fenomeno de la catastrofe retrasada.

Bibliografıa
[1] Abraham, R. and Shaw, Ch.D., 1992, Dynamics: The Geometry of Behavior, Sec-ond Edition, Addison-Wesley.
[2] Aracil, J. 1981, “Structural Stability of low-order System Dynamics Models”. Int.J. System Science 12:423-441.
[3] Aracil, J. 1984, “Qualitative Analysis and Bifurcations in System Dynamics Mod-els”. IEEE-SMC-14 (4):688-696.
[4] Aracil, J. 1986, “Bifurcations and Structural Stability in the Dynamical SystemsModeling Process”. Systems Research 3 (4):243-252.
[5] Aracil, J. y F. Gordillo, 1997, Dinamica de sistemas, Alianza Editorial.
[6] Aracil, J., E. Ponce and L. Pizarro, 1997, “Behavior patterns of logistic modelswith delay”, aceptado para publicacion en Mathematics and Computers in Simu-lation.
[7] Guckenheimer, J. and P. Holmes, 1983, Nonlinear Oscillations, Dynamical Systemsand Bifurcations of Vector Fields. New York: Springer-Verlag.
[8] Hale, J.K., Kocak, H., 1991, Dynamics and Bifurcations, Springer-Verlag.
[9] Karsky, M., Dore, J-Ch. and Gueneau, P, “De la possibilite d’apparition de catas-trophes differes”, Ecodecision, No. 6, Septembre 1992, Montreal.
[10] Kuznetsov, Y.A., 1995, Elements of Applied Bifurcation Theory, Springer-Verlag.
[11] Mosekilde, E., J. Aracil and P. Allen. 1988, “Instabilities and Chaos in Non-linearDynamical Systems”, System Dynamics Review, 4, 1, 14-55.
[12] Nayfeh, A.H., Balachandran, B., 1995, Applied Nonlinear Dynamics, Wiley.
[13] Thom, R., 1977, Stabilite structurelle et morphogenese, InterEditions, Paris (ver-sion espanola Estabilidad estructural y morfogenesis en Gedisa).
[14] Strogatz, S.H., 1995, Nonlinear Dynamics and Chaos, Addison-Wesley.
85

86 BIBLIOGRAFIA
t
A
O
Figura 3.36: Bimodal behavior pattern: attractor A stands for normal growth and Ofor decay.
[15] M. Vazquez, M. Liz, J. Aracil, 1996a, “Knowledge and reality: some conceptualissues in the system dynamics modelling”, System Dynamics Review, Vol. 12, no.1, 21-37.
[16] M. Vazquez, M. Liz, J. Aracil, 1996b, “An Epistemological Framework for SystemDynamics Modelling”, Revue Internationale de Systemique, Vol. 9, Num. 5, 461-489.
[17] E.C. Zeeman, 1977, Catastrophe Theory, Addison-Wesley.

3.6. APENDICE 87
xe
μ = 1 μ = 0
1< < μ μ*
xe-
(xe*, μ*)
xe+
μ0 < < 1
α2 nδ
1- δ 1
1-4
2
-
δ2
1+-
μ = 1
δ
1-4
δ 1-2
δ
1-2
( )2δ
Figura 3.37: The graph of the function δ2nα(xe).
La filosofıa esta escrita en ese grandioso libro que esta continuamente abier-to ante nuestros ojos (lo llamo universo). Pero no se puede descifrar si antesno se comprende el lenguaje y se conocen los caracteres en que esta escrito.Esta escrito en el lenguaje matematico, siendo sus caracteres triangulos,cırculos y figuras geometricas. Sin estos medios es humanamente imposiblecomprender una palabra; sin ellos, deambulamos vanamente en un oscurolaberinto.
Galileo
Il Saggiatore
3.6. Apendice
En este apendice se va a generalizar para cualquier n la invariancia de los autovaloresde un sistema dinamico en un punto de equilibrio bajo una transformacion diagonalmonotona y creciente. Sea el sistema dinamico
x = g(x) x ∈ X ⊂ IRn (3.14)
Se aplica la transformacion
x = T (x) (3.15)
siendo T (x) = diag[ti(x)] una matriz diagonal tal que cada ti es una funcion monotonacreciente, dti/dxi > 0. La transformacion T tiene inversa T−1 = diag[1/ti(x)]. Al aplicar

88 BIBLIOGRAFIA
la transformacion se tiene˙x = [Dx(T )]−1g(T (x)) (3.16)
Los equilibrios son los mismos en las dos formalizaciones del sistema dinamico, y estanligados por la transformacion T .
Los autovalores de los dos sistemas dinamicos son los mismos. En efecto, el jacobianodel transformado es:
A = Dx([Dx(T )]−1)g(T (x)) + [Dx(T )]−1[∂f
∂x][Dx(T )]
pero como en el equilibrio g(T (x)) = 0, luego
A = [Dx(T )]−1[∂f
∂x][Dx(T )]
cuyos autovalores son los mismos que los del sistema dinamico original. La estructuradel retrato de estados es la misma. Lo unico que las diferencia son las contracciones ydilataciones segun los ejes que tienen lugar de acuerdo con la transformacion T .

Capıtulo 4
Funcion descriptiva y balancearmonico
4.1. Metodo del primer armonico
Los metodos clasicos de sistemas realimentados lineales estan basados en el empleode la funcion de transferencia, que posee una interpretacion en el dominio de la fre-cuencia de gran interes para el analisis y la concepcion de esos sistemas realimentados.Sin embargo, el concepto de funcion de transferencia esta basado en la propiedad delinealidad (suma de causas produce suma de efectos) que no poseen, por su propianaturaleza los sistemas no lineales.
Sin embargo, como vamos a ver en lo que sigue, es posible aplicar una versionampliada del metodo de la respuesta en frecuencia a sistemas no lineales medianteel metodo de la funcion descriptiva. Con este metodo, como vamos a ver, es posibleadaptar los metodos de diseno de sistemas lineales en el dominio de la frecuencia,empleando los diagramas de Bode y similares, al caso de los sistemas no lineales, sibien en este ultimo caso los resultados son exclusivamente aproximados.
4.1.1. Ejemplo introductorio
Los sistemas no lineales pueden presentar oscilaciones de amplitud y periodo fijossin excitacion exterior. Esas oscilaciones se denominan ciclos lımites u oscilacionesautoexcitadas. Una de la primeras ecuaciones propuestas para estudiar este fenomenose debe al ingeniero electrico holandes Balthasar Van der Pol. Esta ecuacion es la
89

90 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
siguiente:x+ α(x2 − 1)x+ x = 0 (4.1)
vamos a emplear esta ecuacion como ejemplo introductorio al metodo del primerarmonico. Para ello, vamos a suponer que existe un ciclo lımite de amplitud y fre-cuencia no determinadas, y vamos a ver que restricciones impone la ecuacion anteriora esta amplitud y frecuencia.
+
-
0 −x
Elemento LinealElemento no lineal (−xx2)
(.)2
x
s
v αs2−αs+1
Figura 4.1: Diagrama de bloques del oscilador de Van der Pol
Puesto que el analisis de la ecuacion de Van der Pol lo estamos haciendo como intro-duccion al estudio de sistemas realimentados no lineales conviene que representamos laecuacion (4.1) mediante un diagrama de bloques como el de la figura 4.1. En esta figurase tiene un sistema realimentado, con realimentacion unitaria, en cuya cadena directaaparece un bloque no lineal y uno lineal. Como veremos luego, esta sera la forma quetomaran los sistemas realimentados no lineales a los que se aplica el metodo del primerarmonico.
Para justificar el diagrama de la figura 4.1 basta reescribir la expresion (4.1) de laforma
x− αx+ x = −αx2x
Se define v = −x2x, con lo que la anterior expresion se convierte en
x− αx+ x = αv
cuya funcion de transferencia es
x
v(s) =
α
s2 − αs+ 1
Supongamos que el sistema de la figura 4.1 oscila, de modo que la senal x evolucionade la forma
x(t) = A senωt (4.2)

4.1. METODO DEL PRIMER ARMONICO 91
en donde A es la amplitud del ciclo lımite y ω su frecuencia. En este caso se tiene
x(t) = Aω cosωt
por consiguiente, la salida del bloque no lineal de la figura 4.1 viene dada por
v = −x2x = A2 sen2 ωtAω cosωt (4.3)
= −A3ω
2(1 − cos 2ωt) cosωt (4.4)
= −A3ω
4(cosωt− cos 3ωt) (4.5)
El paso de (4.3) a (4.4) se basa en que
2 sen2 ωt = 1 − cos 2ωt
ya quecos 2ωt = cos2 ωt− sen2 ωt = 1 − 2 sen2 ωt
Por otra parte, el paso de (4.4) a (4.5) es un poco mas elaborado. Para demostrarlo separte de
cos 3ωt = cos 2ωt cosωt− senωt sen 2ωt
= cosωt(1 − 2 sen2 ωt) − 2 sen2 ωt cosωt
= cosωt(1 − 4 sen2 ωt)
= cosωt(1 − 2 + 2 cos 2ωt)
= cosωt(2 cos 2ωt− 1)
de donde se tiene que
cosωt− cosωt cos 2ωt =1
2(cosωt− cos 3ωt)
En la expresion (4.5) se observa que la senal v contiene un armonico de tercer orden.Sin embargo, sucede que la parte lineal se comporta como un filtro paso bajo, demodo que se puede suponer razonablemente que este armonico de tercer orden resultasuficientemente atenuado por el bloque lineal y que puede, en una primera aproximaciondespreciarse. Con estos supuestos, la senal v toma la forma aproximada
v ≈ −A3ω
4(cosωt) =
A2
4
d
dt(−A senωt) (4.6)
De este modo el bloque no lineal de la figura 4.1 puede representarse en forma aprox-imada como se hace en la figura 4.2. El bloque no lineal de la figura 4.1 se describede forma aproximada, mediante una funcion de transferencia como la que se indicaen la figura 4.2. Conviene observar que esta “funcion de transferencia”depende de laamplitud de la senal de entrada A, lo que no sucede en ningun caso con una funcionde transferencia de un sistema lineal.

92 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
+
-
−x xr = 0
Aproximacion cuasi lineal
A2
4s
v αs2−αs+1
Figura 4.2: Aproximacion lineal del oscilador de Van der Pol
En general, podemos escribir que las senales de salida v del bloque no lineal de lafigura 4.2 vienen dadas por
v = N(A, ω)(−x) (4.7)
en donde N juega el mismo papel que la funcion de transferencia en un sistema lineal,aunque en este caso con la propiedad adicional de depender no solamente de la fre-cuencia ω, sino tambien de la amplitud A. A la funcion N la denominaremos funciondescriptiva del elemento no lineal correspondiente y constituye una generalizacion delconcepto de funcion de transferencia al estudio de los sistemas no lineales (aunqueaquı con un caracter aproximado ya que para llegar a ella se han despreciado losarmonicos de orden superior al primero, a partir de la consideracion del caracter delfiltro paso bajo del bloque lineal).
En el caso que nos ocupa la funcion descriptiva toma la forma
N(A, ω) = jωA2
4(4.8)
es decir el bloque no lineal se puede aproximar por la funcion de respuesta en frecuenciaN . De acuerdo con la cadena directa del sistema de la figura 4.2, se puede escribir
x = A senωt = G(jω)v = G(jω)N(A, ω)(−x) (4.9)
Se sabe que una senal senoidal se puede escribir en forma compleja mediante la expo-nencial
x = Aejωt
con lo que la anterior expresion (4.9) puede escribir
Aejωt = G(jω)N(A, ω)(−Aejωt)
de donde se tiene1 +G(jω)N(A, ω) = 0 (4.10)

4.1. METODO DEL PRIMER ARMONICO 93
esta expresion, en realidad, es una forma de escribir la expresion (4.1), es decir laecuacion del sistema, habida cuenta de la simplificacion que ha permitido pasar dela expresion (4.3) a la (4.6). La resolucion de esta ecuacion en la amplitud A y lafrecuencia ω permite determinar la amplitud y frecuencia a la que oscila el sistema. Enel caso concreto que nos ocupa, la expresion (4.10) se convierte en
1 +α
(jω)2 − α(jω) + 1
A2
4jω = 0 (4.11)
que conduce a4((jω)2 − α(jω) + 1) + αA2jω = 0
cuya parte real es−4ω2 + 4 = 0
cuya solucion conduce a ω = 1, y cuya parte imaginaria es
−4α + αA2 = 0
por lo que A = 2. Por tanto el sistema admite una solucion en forma de oscilacion conamplitud A = 2 y frecuencia ω = 1.
Conviene observar que la expresion (4.11) escrita en forma de Laplace toma la forma
1 +α
s2 − αs+ 1
A2s
4= 0
que es la ecuacion caracterıstica en bucle cerrado del sistema de la figura 4.2. Losautovalores de esta ecuacion son
λ1,2 = −1
8α(A2 − 4) ±
√1
64α2(A2 − 4)2 − 1 (4.12)
en los que haciendo A = 2 se obtienen los autovalores λ1,2 = ±j; es decir existe unciclo lımite de amplitud 2 y frecuencia 1. Conviene observar que ni la amplitud ni lafrecuencia obtenidas dependen del parametro α.
4.1.2. Principios del metodo
Supuestos basicos del metodo:
1. Hay un unico componente no lineal.
2. Ese componente es invariante en el tiempo.

94 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
y(t)x(t)
-
+
r(t) = 0
Elemento linealElemento no lineal
v = f(x)v(t) G(s)
Figura 4.3: Sistema no lineal
-
+
r(t) = 0 x(t) u(t) y(t)G1(s)
v(t)Gp(s)
G2(s)
Figura 4.4: Sistema de control con una no linealidad
3. La parte lineal se comporta como un filtro paso-bajo.
4. La no linealidad es simetrica, de modo que no aparece en la salida un senal decontinua, cuando la senal de entrada es sinusoidal.
Debido a estas limitaciones, el metodo de la funcion descriptiva se utiliza fundamental-mente para el analisis de estabilidad y no suele aplicarse a problemas de diseno optimode sistemas.
4.1.3. Transformacion de Fourier
La salida v(t) de un elemento no lineal, en respuesta a una senal sinusoidal, deamplitud A y frecuencia ω, es una senal periodica de la misma frecuencia, que se puededesarrollar en serie de Fourier, de la forma:
v(t) = a0 +∞∑
k=1
(ak cos(kωt) + bk sen(kωt))
El termino independiente es el valor medio de la senal en un perıodo.

4.1. METODO DEL PRIMER ARMONICO 95
a0 =1
2π
∫ π
−π
v(t)d(ωt)
Para una senal sin componente de continua este valor es cero; es decir a0 = 0(recuerdese el supuesto 4 de 4.1.2).
ak =1
π
∫ π
−π
v(t) cos(kωt)d(ωt) k = 0, 1, 2, ... (4.13)
bk =1
π
∫ π
−π
v(t) sen(kωt)d(ωt) k = 0, 1, 2, ... (4.14)
Casos de interes:
v(t) es impar [v(ωt) = −v(−ωt)], entonces ak = 0, k = 0, 1, 2, ..., y en desarrollosolo tiene terminos en senos (figura 4.5a).
v(t) es alternada [v(ωt+ π) = −v(ωt)], entonces el desarrollo solo tiene terminosimpares (figura 4.5b).
−x
x
a)
x
b)
v(−x)
v(x)
v(x)
v(x + π)
x + π
Figura 4.5: Senales impar (a) y alternada (b)
4.1.4. Funcion descriptiva
En el supuesto de que se considere unicamente la componente fundamental deldesarrollo en serie, y recordando que a0 = 0, se tiene que la expresion se convierte en
v(t) = v1(t) = a1 cos(ωt) + b1 sen(ωt) = M sen(ωt+ φ) (4.15)
En la figura 4.6 se representa un elemento no lineal y su representacion mediante lafuncion descriptiva. De la expresion (4.15) se tiene
M(A, ω) =√a2
1 + b21 φ(A, ω) = tag−1
(a1
b1
)

96 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
N.L. N(A, ω)Asen(ωt) Asen(ωt)w(t) Msen(ωt + φ)
Figura 4.6: Elemento no lineal y funcion descriptiva
En la figura 4.6 se muestra como la componente fundamental de la salida de un sis-tema no lineal a una senal sinusoidal de entrada, es otra senal sinusoidal de la mismafrecuencia pero de amplitud M y desfase φ. Empleando una representacion complejala sinusoide puede escribirse
v1 = Mej(ωt+φ) = (b1 + ja1)ejωt
Con los anteriores elementos ya estamos en posicion de definir la funcion descriptivade un elemento no lineal como el cociente complejo entre la componente fundamentaldel elemento no lineal y la senal sinusoidal de entrada A senωt; es decir
N(A, ω) =Mej(ωt+φ)
Aejωt=M
Aejφ =
1
A(b1 + ja1) (4.16)
Es decir, la funcion descriptiva N(A, ω) es una funcion compleja cuyo modulo y argu-mento representan la amplificacion y el desfase del primer armonico de la salida v(t)de un sistema no lineal ante una entrada sinusoidal de amplitud A y frecuencia ω.
Si la no-linealidad puede escribirse v = ϕ(y), la funcion descriptiva viene dada por
N(A, ω) =b1 + ja1
A=
1
πA
∫ 2π
0
ϕ(A sen θ)(sen θ + j cos θ)dθ (4.17)
El concepto de funcion descriptiva puede, por tanto, ser considerado como unaampliacion de la nocion de respuesta frecuencial de los sistema lineales. Las diferenciasentre ambos conceptos se limitan a que la funcion descriptiva de un elemento no linealdepende de la amplitud, mientras que la funcion de transferencia de un elemento linealno depende de ella. Sin embargo, con vistas a las aplicaciones al diseno de sistemasrealimentados pueden tratarse de forma analoga.
En general, por tanto, la funcion descriptiva depende de la frecuencia y la amplitudde la senal de entrada. Existen, sin embargo, algunos casos especiales. Cuando la nolinealidad es uniforme (es decir, su caracterıstica es una funcion que asigna a cada valorde la senal de entrada un unico valor de la senal de salida) la funcion descriptiva Nes real e independiente de la frecuencia de entrada. El caracter real de N se debe aque a1 = 0, debido a que la senal de salida del elemento no lineal es impar, y en esecaso, como hemos recordado antes, todos los terminos ai se anulan. Ademas, la salida

4.1. METODO DEL PRIMER ARMONICO 97
es siempre alternada, por lo que los terminos pares desaparecen. Por tanto ante unano-linealidad uniforme se tendra
v(t) = b1 senωt+ b3 sen 3ωt+ b5 sen 5ωt+ ...
4.1.5. Interpretacion estocastica de la funcion descriptiva
Se trata de determinar N(A) de modo que N(A)A senωt aproxime a ϕ(A senωt)minimizando el error cuadratico medio. Sea
e(t) = ϕ(A senωt) −N(A)A senωt
se pretende minimizar
J =1
2π
∫ 2π
0
e2(t)d(ωt)
sustituyendo e(t) y diferenciando
dJ
dN=
2
2π
∫ 2π
0
[ϕ(A senωt) −N(A)A senωt](−A senωt)d(ωt) = 0
luego ∫ 2π
0
ϕ(A senωt)A senωtd(ωt) =
∫ 2π
0
N(A)A2 sen2 ωtd(ωt)
pero ∫ 2π
0
N(A)A2 sen2 ωtd(ωt) = πN(A)A
luego
N(A) =1
πA
∫ 2π
0
ϕ(A senωt)A senωtd(ωt)
4.1.6. Propiedad del cono
Sea ϕ(.) tal que
k1y2 ≤ yϕ(y) ≤ k2y
2 (4.18)
se dice que ϕ(.) esta en el cono [k1, k2]. Si ademas ϕ(.) es impar, ϕ(y) = −ϕ(−y),entonces se tiene que
k1 ≤ N(A) ≤ k2 (4.19)

98 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
es decir la funcion descriptiva esta en el intervalo [k1, k2]. En efecto,
N(A) =1
πA
∫ 2π
0
ϕ(A senωt) senωtd(ωt)
=1
πA2
∫ 2π
0
ϕ(A sen θ)A sen θdθ
≥ 1
πA2
∫ 2π
0
k1(A sen θ)2dθ
=k1
π
∫ 2π
0
k1 sen2 θdθ
=k1
πk1 = k1
Analogamente para k2.
4.2. Algunas funciones descriptivas
La determinacion de la funcion descriptiva se puede hacer basicamente de dos for-mas: por calculo analıtico o por determinacion experimental.
Por lo que respecta al metodo analıtico vamos a presentar varios ejemplos parailustrar su aplicacion. El primero de los ejemplos es una saturacion que aporta unejemplo de un sistema no lineal con caracterıstica estatica. Tambien se presenta unejemplo de un rele con holgura, cuya caracterıstica es dinamica.
4.2.1. Saturacion
En la figura 4.7 se muestra la caracterıstica de una saturacion. Para valores de x < ael elementos no lineal transmite la senal de forma lineal, con una amplificacion. Paravalores de x > a la senal de entrada queda truncada por efecto de la no linealidad.
En la figura 4.7 se muestra el efecto de la saturacion sobre una senal de entrada deamplitud mayor que a, para el caso en que A sea mayor que a. En tal caso se tiene quela senal de salida del elemento no lineal vendra dada por
v(t) =
{kA sen(ωt) 0 ≤ ωt ≤ γka γ ≤ ωt ≤ π/2
siendo γ = sen−1(a/A)

4.2. ALGUNAS FUNCIONES DESCRIPTIVAS 99
entrada
sinusoidal
ka ωtγ
ka
0
ωt
γ
π/2
A0
0 a x
k
salida no saturada
salida saturada
saturacion
x(t)
v v(t)
Figura 4.7: Caracterıstica de una saturacion.
a1 = 0 observese que el caracter impar de v(t) implica que a1 = 0 y que la simetrıade la senal sobre los cuatro cuadrantes en que se puede considerar dividido un periodoindica que
b1 =4
π
∫ π/2
0
v(t) senωtd(ωt) (4.20)
=4
π
∫ γ
0
kA sen2 ωtd(ωt) +4
π
∫ π/2
γ
ka senωtd(ωt)
=2kA
π(γ +
a
A
√1 − a2
A2)
por consiguiente, la funcion descriptiva resulta ser
N(A) =b1A
=2k
π(γ +
a
A
√1 − a2
A2) (4.21)
En la figura 4.8 se representa la funcion descriptiva de una saturacion.
4.2.2. Rele
La caracterıstica no lineal de un rele se muestra en la figura 4.9. Si se comparacon la caracterıstica de una saturacion, que se vio en la figura 4.7 se tiene que la no

100 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
0 1 5 10A/a
0.0
0.2
0.4
0.6
0.8
1.0
1.2N
(A)/
kRango lineal
Figura 4.8: Funcion descriptiva de una saturacion.
0 5 10A
0.0
0.4
0.8
1.2
1.6
2.0
N(A
)/M
a cero
a infinitoencendido
apagado
-M
M
0 x
v
Figura 4.9: Caracterıstica de un rele

4.2. ALGUNAS FUNCIONES DESCRIPTIVAS 101
linealidad de un rele corresponde a un caso lımite de una saturacion definido por
a→ 0, k → ∞siendo ka = M . Por tanto, b1 puede obtener de la expresion (4.21) calculando el lımite.Sin embargo se obtiene mas facilmente calculandolo directamente de acuerdo con
b1 =4
π
∫ π/2
0
M senωtd(ωt) =4M
π(4.22)
por lo que la funcion descriptiva de un rele viene dada por
N(A) =4M
πA(4.23)
En la figura 4.9 se representa la funcion descriptiva de un rele. Puede compararse esafuncion descriptiva con la de la saturacion que se vio en la figura 4.8.
4.2.3. Holgura
b
salida
angulo
entrada
angulo
C
B
A
0
-b
D E
b
Engranaje secundario Engranaje primario
Figura 4.10: Caracterıstica de una holgura.
En la figura 4.10 se muestra la caracterıstica de una holgura, que se presenta amenudo en los sistemas de transmision mecanica mediante engranajes. Como conse-cuencia de la holgura, cuando el engranaje primario gira un angulo menor que b, elsecundario no se mueve, como corresponde a la zona muerta (segmento OA en la figu-ra 4.10); despues de establecido el contacto en engranaje secundario sigue la rotaciondel primario de manera lineal (segmento AB). Si se invierte el sentido de giro del en-granaje primario entonces durante un angulo 2b el secundario no se mueve, de acuerdocon el segmento BC de la figura 4.10. Cuando se restablece el contacto entre los dosengranajes el secundario sigue al primario en la direccion opuesta (segmento CD). Porconsiguiente, si el engranaje primario esta sometido a un movimiento periodico el se-cundario recorrera el camino cerrado EBCD, de la figura 4.10. Conviene observar quelos puntos B, C, D y E de la figura dependen de la amplitud de la senal sinusoidal deentrada.

102 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
La holgura suministra un ejemplo de no linealidad con memoria, en la que el valorde la salida en un instante de tiempo determinado, no depende exclusivamente del valorde la entrada en ese instante, sino de la historia previa de las senales de entrada queafectan al sistema.
2π − γ
x
ωt
b
3π/2
π − γ
π/2
-A A
x(t)
-b
−k(A − b)
k(A − b)
π/2
3π/2
ωt
entrada sinusoidal
v v(t)
Figura 4.11: Generacion de la senal de salida para una senal sinusoidal de entrada enuna holgura.
El calculo de la funcion descriptiva resulta en este caso mas complejo que en el dela no linealidades sin memoria. En la figura 4.11 se muestra como se genera la senal desalida para una senal sinusoidal de entrada. La senal de salida v(t), en un periodo, sedetermina dividiendo este periodo en las cuatro partes correspondientes a los cuatrotramos que aparecen en el romboide de la caracterıstica. Se tiene
v(t) = (A− b)k π2≤ ωt ≤ π − γ
v(t) = A(senωt+ b)k π − γ ≤ ωt ≤ 3π2
v(t) = −(A− b)k 3π2≤ ωt ≤ 2π − γ
v(t) = A(senωt− b)k 2π − γ ≤ ωt ≤ 5π2
donde γ = sen−1(1 − 2b/A). En este caso la caracterıstica no es uniforme y la compo-nente fundamental de la senal de salida presenta variacion de amplitud y de fase. Setiene
a1 =4kb
π(b
A− 1)
b1 =Ak
π(π
2− sen−1(
2b
A− 1) − (
2b
A− 1)
√1 − (
2b
A− 1)2)

4.2. ALGUNAS FUNCIONES DESCRIPTIVAS 103
es decir, la funcion descriptiva de una holgura viene dada por
|N(A)| =1
A
√a2
1 + b21
∠N(A) = tan−1(a1
b1)
En las figuras 4.12 y 4.13 se representan la amplitud y desfase, respectivamente, de lafuncion descriptiva de una holgura. Observese que en este caso la funcion descriptiva
0.0 0.2 0.4 0.6 0.8 1.0b/A
0.0
0.2
0.4
0.6
0.8
1.0
Am
plit
ud
Figura 4.12: Amplitud de la funcion descriptiva de una holgura.
depende exclusivamente de la amplitud de la senal de entrada, como sucedıa en las nolinealidades sin memoria (como la saturacion y el rele) que se han visto anteriormente.Sin embargo, en este caso la funcion descriptiva tiene modulo y argumento (amplitud ydesfase), mientras que en los casos de no linealidades sin memoria la funcion descriptivaposee unicamente amplitud, y no desfase.
4.2.4. Determinacion experimental de la funcion descriptiva
En lo ejemplos que se acaban de ver, se ha determinado la funcion descriptiva me-diante la aplicacion de metodos matematicos. Ello es posible cuando la formulacionmatematica del problema es aceptablemente sencilla. Cuando no es ası, se procede demanera experimental con ayuda de un analizador armonico. Se excita el sistema nolineal cuya descripcion descriptiva se quiere determinar, con senales sinusoidales, y la
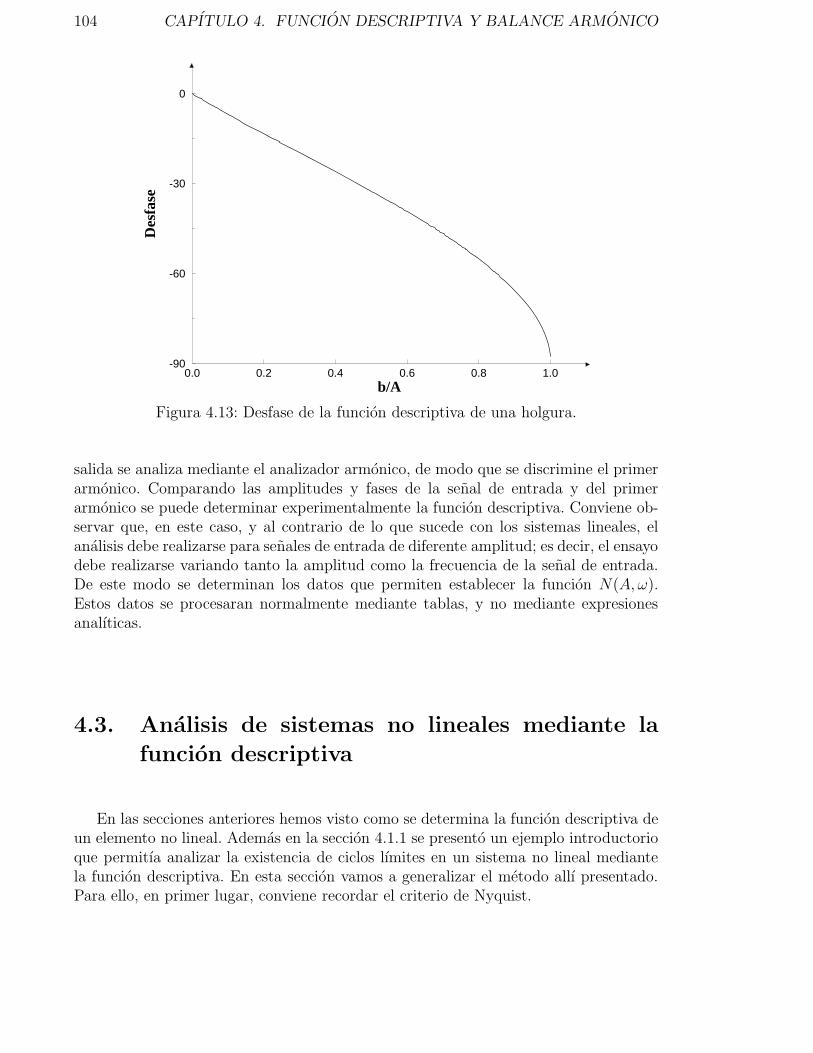
104 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
0.0 0.2 0.4 0.6 0.8 1.0b/A
-90
-60
-30
0
Des
fase
Figura 4.13: Desfase de la funcion descriptiva de una holgura.
salida se analiza mediante el analizador armonico, de modo que se discrimine el primerarmonico. Comparando las amplitudes y fases de la senal de entrada y del primerarmonico se puede determinar experimentalmente la funcion descriptiva. Conviene ob-servar que, en este caso, y al contrario de lo que sucede con los sistemas lineales, elanalisis debe realizarse para senales de entrada de diferente amplitud; es decir, el ensayodebe realizarse variando tanto la amplitud como la frecuencia de la senal de entrada.De este modo se determinan los datos que permiten establecer la funcion N(A, ω).Estos datos se procesaran normalmente mediante tablas, y no mediante expresionesanalıticas.
4.3. Analisis de sistemas no lineales mediante la
funcion descriptiva
En las secciones anteriores hemos visto como se determina la funcion descriptiva deun elemento no lineal. Ademas en la seccion 4.1.1 se presento un ejemplo introductorioque permitıa analizar la existencia de ciclos lımites en un sistema no lineal mediantela funcion descriptiva. En esta seccion vamos a generalizar el metodo allı presentado.Para ello, en primer lugar, conviene recordar el criterio de Nyquist.
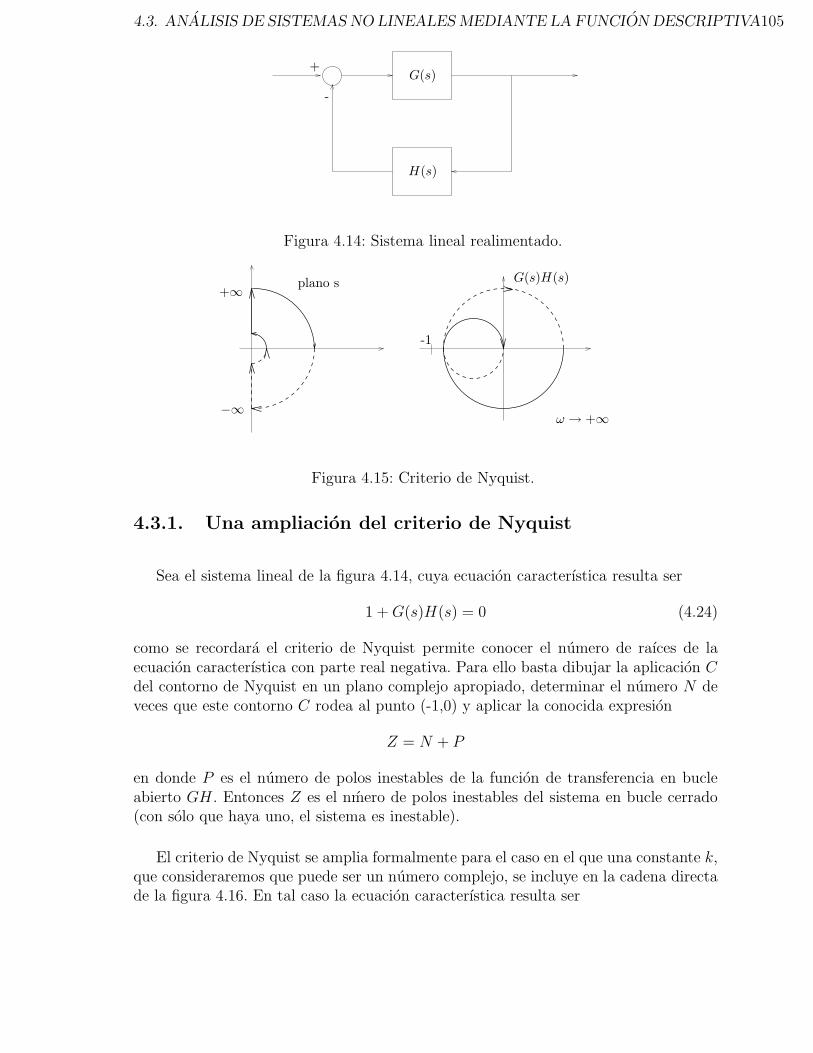
4.3. ANALISIS DE SISTEMAS NO LINEALES MEDIANTE LA FUNCION DESCRIPTIVA105
+
-
G(s)
H(s)
Figura 4.14: Sistema lineal realimentado.
−∞
+∞
ω → +∞
-1
plano sG(s)H(s)
Figura 4.15: Criterio de Nyquist.
4.3.1. Una ampliacion del criterio de Nyquist
Sea el sistema lineal de la figura 4.14, cuya ecuacion caracterıstica resulta ser
1 +G(s)H(s) = 0 (4.24)
como se recordara el criterio de Nyquist permite conocer el numero de raıces de laecuacion caracterıstica con parte real negativa. Para ello basta dibujar la aplicacion Cdel contorno de Nyquist en un plano complejo apropiado, determinar el numero N deveces que este contorno C rodea al punto (-1,0) y aplicar la conocida expresion
Z = N + P
en donde P es el numero de polos inestables de la funcion de transferencia en bucleabierto GH . Entonces Z es el nmero de polos inestables del sistema en bucle cerrado(con solo que haya uno, el sistema es inestable).
El criterio de Nyquist se amplia formalmente para el caso en el que una constante k,que consideraremos que puede ser un numero complejo, se incluye en la cadena directade la figura 4.16. En tal caso la ecuacion caracterıstica resulta ser
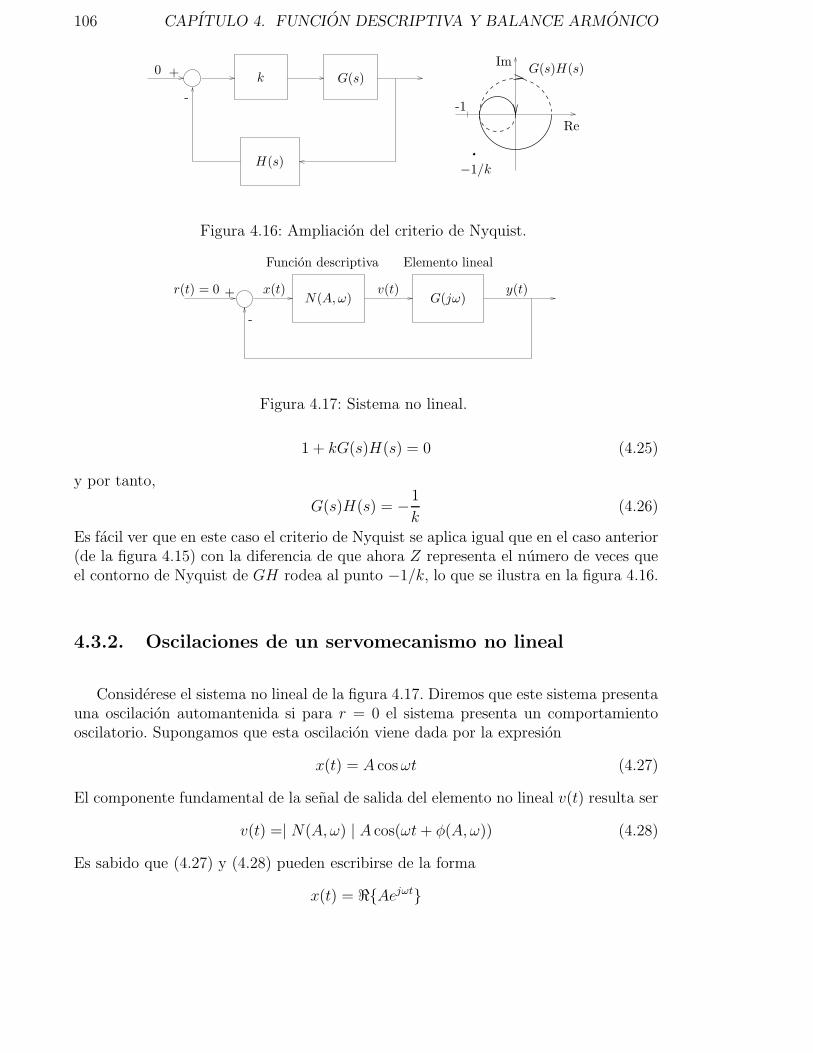
106 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
0
-
+
Re
Im
-1
k G(s)
−1/kH(s)
G(s)H(s)
Figura 4.16: Ampliacion del criterio de Nyquist.
N(A, ω) G(jω)
Elemento lineal
y(t)x(t)+
-
Funcion descriptiva
r(t) = 0 v(t)
Figura 4.17: Sistema no lineal.
1 + kG(s)H(s) = 0 (4.25)
y por tanto,
G(s)H(s) = −1
k(4.26)
Es facil ver que en este caso el criterio de Nyquist se aplica igual que en el caso anterior(de la figura 4.15) con la diferencia de que ahora Z representa el numero de veces queel contorno de Nyquist de GH rodea al punto −1/k, lo que se ilustra en la figura 4.16.
4.3.2. Oscilaciones de un servomecanismo no lineal
Considerese el sistema no lineal de la figura 4.17. Diremos que este sistema presentauna oscilacion automantenida si para r = 0 el sistema presenta un comportamientooscilatorio. Supongamos que esta oscilacion viene dada por la expresion
x(t) = A cosωt (4.27)
El componente fundamental de la senal de salida del elemento no lineal v(t) resulta ser
v(t) =| N(A, ω) | A cos(ωt+ φ(A, ω)) (4.28)
Es sabido que (4.27) y (4.28) pueden escribirse de la forma
x(t) = �{Aejωt}

4.3. ANALISIS DE SISTEMAS NO LINEALES MEDIANTE LA FUNCION DESCRIPTIVA107
v(t) = �{| N(A, ω) | Aej(ωt+φ(A,ω))}Empleando esta ultima forma de representar un comportamiento oscilatorio, se tieneque la salida del elemento lineal vendra dada por
y(t) = �{| N(A, ω) | A | G(jω) | ej(ωt+φ+α)}siendo α = ∠G(jω).
Para que la oscilacion sea automantenida, en ausencia de senal de excitacion r, serequiere que:
−Aejωt =| N(A, ω) | A | G(jω) | ej(ωt+φ+α)
Es decir,Aejωt(| N(A, ω) || G(jω) | ej(φ+α))+1 = 0
La anterior expresion se debe satisfacer para todo t, por lo que se tendra
| N(A, ω) || G(jω) | ej(φ+α) + 1 = 0
es decir,N(A, ω)G(jω) + 1 = 0 (4.29)
y por tanto,
G(jω) = − 1
N(A, ω)(4.30)
y cualquier par de valores de A y ω que satisfaga la anterior ecuacion puede dar lugara un ciclo lımite. De aquellos valores que satisfagan esta ecuacion, solo dara lugar a unciclo lımite aquellos para los que la oscilacion periodica sea estable.
4.3.3. Funcion descriptiva independiente de la frecuencia
Considerese el caso en el que la funcion descriptiva N es unicamente funcion de laamplitud A. Este caso incluye todas las no linealidades cuya caracterıstica es uniforme yalgunas no linealidades biformes interesantes como la holgura. En este caso la expresion(4.30) se convierte en
G(jω) = − 1
N(A)(4.31)
En la figura 4.18 se han representado la funcion de transferencia de la parte linealG(jω) (parametrizado en ω) y la curva correspondiente a la inversa de la funciondescriptiva, con el signo cambiado, (parametrizada en A) en el plano complejo. Si estasdos curvas se cortan, entonces los valores de A y de ω correspondientes al punto deinterseccion son soluciones de la ecuacion 4.31, y en consecuencia, pueden existir cicloslımites. Por ejemplo, en la figura 4.18 las dos curvas se cortan en el punto L.

108 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
−1/N(A)
ω
Im
Re
A
G(jω)
L
Figura 4.18: Determinacion de un ciclo lımite.
Conviene recordar que para no-linealidades uniformes N es siempre real y por con-siguiente el trazado de (4.31) siempre esta situado sobre el eje real.
4.3.4. Funcion descriptiva dependiente de la frecuencia
En el caso general la funcion descriptiva depende tanto de la amplitud de la senalde entrada como de su frecuencia y, en consecuencia el metodo que se acaba de veren el apartado anterior, adquiere mayor complejidad. En tal caso la expresion en elsegundo miembro de (4.30) da lugar a una familia de curvas en el plano complejo conA como parametro y ω permaneciendo constante en cada curva, como se muestra enla figura 4.19. De todas las intersecciones entre la familia de curvas 1/N(A, ω) y lacurva G(jω) solamente aquellos puntos de interseccion en los que coincidan los valoresde ω constituyen soluciones de la ecuacion (4.30), y son, por tanto, candidatos a cicloslımites. Existe otro procedimiento grafico para resolver la expresion (4.30). Consiste enconsiderar la representaciones graficas de G(jω)N(A, ω). Dando a A un valor constantey variando ω de 0 a infinito, se obtiene una curva que representa a G(jω)N(A, ω).Procediendo con diferentes valores de A se obtiene una familia de curvas, como la quese muestra en la figura 4.20. La curva de esta familia que pase por el punto (-1,0) enel plano complejo suministra una solucion de la expresion (4.30) .
4.3.5. Estabilidad de los ciclos lımite
Con los ciclos lımites sucede lo mismo que con los equilibrios: que pueden ser estableso inestables. Las soluciones de la ecuacion (4.30) deben someterse a un analisis deestabilidad, para determinar cuales de ellas son estables y cuales no. El criterio deNyquist ampliado que hemos visto en la seccion 4.3.1, permite analizar esa estabilidad.Considerese la figura 4.21 en la que se muestran las intersecciones entre la funcionde transferencia de la parte lineal y la inversa de la funcion descriptiva de la parte
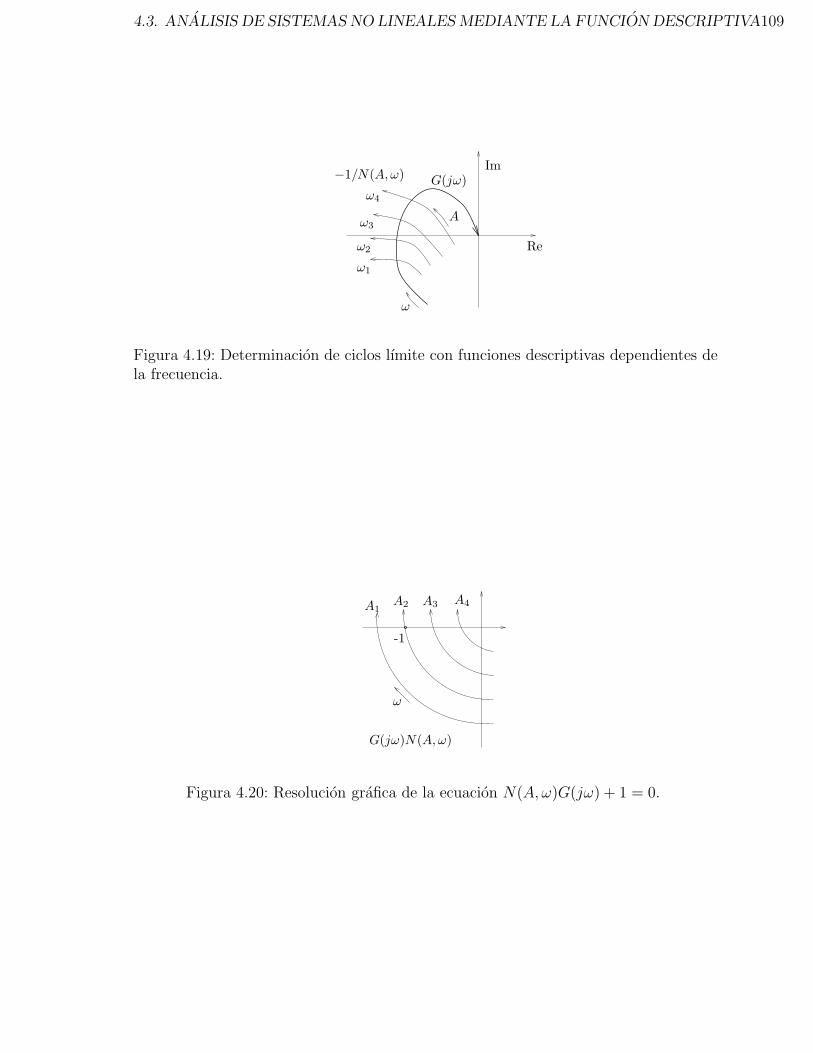
4.3. ANALISIS DE SISTEMAS NO LINEALES MEDIANTE LA FUNCION DESCRIPTIVA109
ω1
ω2
ω3
ω4
ω
Im
Re
A
−1/N(A, ω) G(jω)
Figura 4.19: Determinacion de ciclos lımite con funciones descriptivas dependientes dela frecuencia.
ω
A1A2 A3 A4
-1
G(jω)N(A, ω)
Figura 4.20: Resolucion grafica de la ecuacion N(A, ω)G(jω) + 1 = 0.

110 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
L”1
L2
L1
L′1
G(jω)
Im
Re−1/N(A, ω)
ω
Figura 4.21: Estabilidad de ciclos lımite.
no lineal. Estas dos curvas presentan dos puntos de interseccion, L1 y L2, por lo queel sistema presenta dos ciclos lımites. Observese que el valor de A correspondiente alpunto L1 es menor que el de A correspondiente a L2. Supongase que la funcion detransferencia de la parte lineal G(jω) no posee polos inestables.
Vamos a analizar primero la estabilidad del ciclo lımite correspondiente al puntoL1. Considerese que el sistema se encuentra inicialmente operando en el punto L1,con un ciclo lımite de amplitud A1 y cuya frecuencia en ω1. Debido a una pequenaperturbacion, la amplitud de la senal de entrada al sistema no lineal se incrementaligeramente, y el punto de operacion del sistema se mueve de L1 a L′
1. Puesto que elnuevo punto L′
1 se encuentra a la derecha de la curva G(jω), de acuerdo con el criteriode Nyquist ampliado que se ha visto en la seccion 4.3.1, el sistema es inestable, en estepunto de operacion, y las amplitudes del sistema tienden a crecer. Por consiguiente, elpunto de operacion seguira creciendo a lo largo de curva −1/N(A, ω) hasta el punto L2.Por otra parte, si el sistema se perturba de modo que la amplitud A decrece, entonces elpunto de operacion se movera al punto L′′
1. En este caso el punto L′′1 queda a la izquierda
de G(jω) y el criterio de Nyquist ampliado garantiza la estabilidad del sistema, por loque las amplitudes tenderan a decrecer y el punto de operacion se alejara cada vez masdel punto de equilibrio L1. De todo lo anterior se desprende que una ligera perturbaciondestruye la oscilacion en el punto L1 y que, por consiguiente, que este ciclo lımite esinestable. Un analisis similar puede desarrollarse para el punto L2 con la conclusion deque ciclo lımite en ese caso es estable.
El anterior razonamiento no es del todo convincente, y debe considerarse como unaforma intuitiva de presentar un resultado que, por otra parte es correcto, como se vera acontinuacion.
Una forma mas rigurosa de abordar el estudio de la estabilidad de las oscilacioneses el siguiente. Sea x = Aejωt el primer armonico de la oscilacion automantenida quese perturba ligeramente hasta que su amplitud toma el valor A + ΔA y su frecuencia

4.3. ANALISIS DE SISTEMAS NO LINEALES MEDIANTE LA FUNCION DESCRIPTIVA111
ω + Δω. Despues de la perturbacion, x(t) ya no es una funcion periodica, sino queposee un pequeno amortiguamiento δ, positivo o negativo. Es decir, despues de laperturbacion la senal se convierte en:
x(t) = (A+ ΔA)e−δtej(ω+Δω)t = (A+ ΔA)ej(ω+Δω+jδ)t (4.32)
Por otra parte, la expresion (4.29) se puede escribir
X(A, ω) + jY (A, ω) = 0 (4.33)
agrupando los terminos correspondientes a sus partes real e imaginaria. Por otra parte,la solucion (4.32) debe satisfacer tambien la anterior ecuacion dando lugar a:
X(A+ ΔA, ω + Δω + jδ) + jY (A+ ΔA, ω + Δω + jδ) = 0 (4.34)
Desarrollando en serie de Taylor esta expresion, y tomando £unicamente los termi-nos de primer orden en ΔA, Δω y δ, se tiene:
∂X
∂ωΔω +
∂X
∂AΔA− ∂Y
∂ωδ = 0
∂Y
∂ωΔω +
∂Y
∂AΔA +
∂X
∂ωδ = 0
Eliminando Δω:((∂X
∂ω
)2
+
(∂Y
∂ω
)2)δ =
(∂X
∂A
∂Y
∂ω− ∂Y
∂A
∂X
∂ω
)ΔA
Para que la oscilacion sea estable es necesario que δ y ΔA sean del mismo signo, loque exige que: (
∂X
∂A
∂Y
∂ω− ∂Y
∂A
∂X
∂ω
)> 0 (4.35)
En el caso de una no linealidad uniforme se tiene,
N(A)G(jω) + 1 = 0
Haciendo
G(jω) = U(ω) + jV (ω)
C(A) = − 1
N(A)= P (A) + jQ(A)

112 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
se tiene
X(A, ω) = U(ω) − P (A)
Y (A, ω) = V (ω) −Q(A)
Por lo que la expresion (4.35) se escribe en este caso(∂Q
∂A
∂U
∂ω− ∂P
∂A
∂V
∂ω
)> 0
El primer miembro de esta desigualdad es un producto vectorial lo que puede escribirse
dG(jω)
dω× dC(A)
dA> 0
Este producto vectorial permite la interpretacion geometrica que se muestra en la figura4.22. De acuerdo con ella, un ciclo limite sera estable si recorriendo G(jω) en el sentidode las ω crecientes, en el punto de corte con C(A), se deja a la izquierda el sentido delas A crecientes, en la curva de C(A) = −1/N(A).
(b)
Im
G
Re
−1/N
(a)
Im
G
Re
−1/N
Figura 4.22: Criterio de estabilidad de ciclos lımite: (a) estable; (b) inestable.
De este modo se ha demostrado con rigor el resultado que previamente se habıaobtenido por consideraciones un tanto laxas con respecto al criterio de Nyquist.
Ejemplo
Sea el sistema realimentado de la figura 4.23, que incluye un rele en la cadenadirecta. Supongamos, en primer lugar, que la funcion de transferencia de la parte lineales:
G1(s) =K
s(s+ 2)

4.3. ANALISIS DE SISTEMAS NO LINEALES MEDIANTE LA FUNCION DESCRIPTIVA113
G(s)r = 0 +
-
Figura 4.23: Sistema con un rele y realimentacion.
Se trata de estudiar las posibles oscilaciones del sistema y su estabilidad.
Recordando la expresion (4.23) se tiene que la funcion descriptiva de un rele vienedada por
N(A) =4M
πA
En este caso se supone que M = 1.
Segun lo que se ha visto, el sistema sera oscilatorio si existe una solucion a laecuacion
G1(ω) = − 1
N(A)
Esta ecuacion, en este caso, conduce a
K
jω(jω + 2)= −πA
4
Es decir4K = −πAjω(jω + 2)
Igualando sus partes reales e imaginarias se tiene:
4K = πAω2
−2πAjω = 0
De donde se desprende que ω = 0, y por lo tanto el sistema no oscilara, pues no existeninguna frecuencia para la que se tenga una solucion oscilatoria.
A la misma conclusion se llega empleando metodos graficos, y comprobando que larepresentacion grafica de la funcion de transferencia de la parte lineal y de la funciondescriptiva solo se cortan en el origen.
Supongamos ahora que la ecuacion de la parte lineal es
G2(s) =K
s(s+ 2)(s+ 5)

114 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
Im
A
G2(jω)
ReP”PP ′
Figura 4.24: Estudio de la estabilidad de un sistema no lineal con un rele.
En ese caso la ecuacion de oscilacion se convierte en
K
jω(jω + 2)(jω + 5)= −πA
4
es decir
4K = −πAjω(jω + 2)(jω + 5) = 7Aω2 + Aj(ω3 − 10ω)
Con lo que igualando partes reales e imaginarias se tiene
4K = 7πAω2
ω3 − 10ω = 0
Por lo tanto, en este caso el sistema oscila con una frecuencia ω =√
10 y unaamplitud A = 2K/35π.
Para estudiar la estabilidad del oscilador se recurre al diagrama de Nyquist quese muestra en la figura 4.24. El punto de oscilacion corresponde al punto P de estafigura. Para estudiar la estabilidad del ciclo lımite, supongamos, en primer lugar, unaperturbacion que haga que la entrada al elemento no lineal se incremente a un nuevovalor, de modo que el punto de operacion se desplace a P ′. Puesto que P ′ se encuentraen la region de operacion estable, la amplitud de la entrada al elemento no lineal tiendea decrecer y por tanto el punto de operacion se mueve de nuevo a P . De forma analoga,si la perturbacion hace decrecer la amplitud de la entrada al sistema no lineal entoncesse produce un desplazamiento del punto de operacion a P ′′, que se encuentra situado enla region de operacion inestable. La amplitud de la entrada, en este caso, se incrementade modo que el punto de operacion vuelve de nuevo a P . Por consiguiente el sistematiene un ciclo lımite estable en P .

4.4. LA FUNCION DESCRIPTIVA DUAL 115
a) b)
Figura 4.25:
4.3.6. Fiabilidad del analisis mediante funciones descriptivas
Cuando se emplea el metodo de la funcion descriptiva conviene no olvidar nunca elcaracter aproximado de esa funcion, lo que conduce a resultados que tienen tambien unanaturaleza aproximada. Este caracter aproximado afecta no solo a los valores numericosde las amplitudes y frecuencias de las oscilaciones de los ciclos lımites, sino tambien ala propia existencia de estos.
Conviene recordar una de las hipotesis sobre las que esta basado el metodo: elcaracter de filtro paso bajo del sistema lineal. Ademas, la propia expresion (4.30)puede ser sensible a las aproximaciones que comporta el metodo. Con caracter generalse puede decir que las conclusiones del metodo seran tanto mas solidas cuanto masneta sea la interseccion de las curvas que representan la parte lineal y la inversa dela parte no lineal en la resolucion grafica del metodo. En la figura 4.25 se muestrandos situaciones extremas posibles. En la figura 4.25a se presenta un caso en el queel sistema muestra una gran sensibilidad, lo que hace temer que las conclusiones delmetodo se puedan ver fuertemente afectadas.
Por otra parte, la figura 4.25b muestra un caso en el que las conclusiones sonaltamente fiables. Cabe decir, que cuanto mas perpendicular es la interseccion entrelas curvas G(jω) y −1/N(A, ω), mas fiables son los resultados del metodo.
4.4. La funcion descriptiva dual
En este apartado se extienden las tecnicas de analisis basadas en metodosfrecuenciales al caso de no linealidades asimetricas. Para ello se usa el metodo de la

116 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
funcion descriptiva dual [GV68], [Ath75], [Coo94], [Cue00].
En este metodo se estudia el balance del primer armonico, de tal forma que losciclos lımite admitiran la siguiente representacion:
y(t) = a0 + Re(a1ejωt); a0 ∈ R, a1 ∈ C; Re(a1) ≥ 0, ω > 0, (4.36)
donde, y(t) es la salida de la parte lineal y a0 es el termino de continua. Al igual queen la seccion anterior los ciclos lımite no se consideran en fase, y se puede suponer, sinperdida de generalidad, que Im(a1) = 0.
Es importante hacer notar que la expresion (4.36) abarca no solo al representacionde ciclos lımite asimetricos como salida del sistema, sino que tambien contempla laposibilidad tanto de ciclos lımite simetricos (a0 = 0), como la de puntos de equilibrio(a1 = 0).
Ası pues, considerese que las senales correspondientes a la salida del bloque lineal,y(t), definidas segun (4.36) entran, por efecto de la realimentacion del sistema (figura4.3), en el bloque no lineal dando lugar a unas salidas que, en regimen permanente,corresponden a las senales periodicas v(t). Dichas salidas pueden ser representadas pormedio de un desarrollo en serie como:
v(t) = N0a0 + Re(N1a1ejωt) + . . .
donde, N0 y N1 corresponden, respectivamente, a la ganancia de continua y a la delprimer armonico calculadas desde la entrada del bloque no lineal a la salida de dichobloque. Estas ganancias pueden ser obtenidas de manera facil a partir de la expresionde los coeficientes de Fourier como:
N0(a0, a1, ω) =1
2πa0
∫ π
−π
v(t) d(ωt)
N1(a0, a1, ω) =1
πa1
∫ π
−π
v(t)e−jωt d(ωt).
Si se considera una no linealidad estatica, es posible eliminar la dependencia de ωde N0 y N1.
Por tanto, para que se satisfaga el balance del primera armonico, y exista un ciclolımite, sera necesario que los terminos de orden cero y de primer orden de y(t) seaniguales a los correspondientes terminos calculados (despreciando armonicos de ordensuperior) a la salida del bloque lineal cuando se toma como entrada la senal v(t). Estacondicion puede ser expresada como el sistema:
(G(0)N0(a0, a1) + 1)a0 = 0
(G(0)N1(a0, a1) + 1)a1 = 0. (4.37)

4.4. LA FUNCION DESCRIPTIVA DUAL 117
En el caso que exista solucion en a0, a1 y ω del sistema (4.37) se podra predecir laexistencia de un ciclo lımite. Cuando la solucion sea independiente de ω y tenga a1 = 0,esta sera la correspondiente a un punto de equilibrio del sistema.
4.4.1. Ejemplo
Para ilustrar este metodo, y a fin de tener un resultado que comparar con elmetodo de deteccion de ciclos lımite con N armonicos, se aplica el metodo de la funciondescriptiva dual a un sistema simple pero con una riqueza de comportamiento suficiente[SAA98a], [SAA98b].
El sistema a analizar es el representado en la figura 4.26 que tiene una no linealidadcuadratica que, al no ser simetrica con respecto al origen, justifica el uso de la funciondescriptiva dual.
+
-G(s)=
s+1
s +bs+22
r=0 u y
- y2
Figura 4.26: Sistema no lineal estudiado.
En primer lugar se hallan los puntos de equilibrio, para ello hay que resolver laecuacion:
y +G(0)ϕ(y) = 0 ⇔ ϕ(y) = − y
G(0)
donde, ϕ(y) = −y2 y G(0) = 12. Esta ecuacion se puede resolver graficamente a partir
de la figura 4.27.
Se observa que se obtienen dos puntos de equilibrio: y = 0 e y = 2. A continuacionhay que estudiar su estabilidad. Para ello se usa el criterio de Nyquist. Aunque elsistema sea no lineal se puede aplicar este criterio ya que se estudia la estabilidad localdel sistema en el punto de equilibrio.
En primer lugar se analiza la estabilidad del equilibrio en y = 0, cuyo diagrama deNyquist en funcion del parametro b es el representado en la figura 4.28.
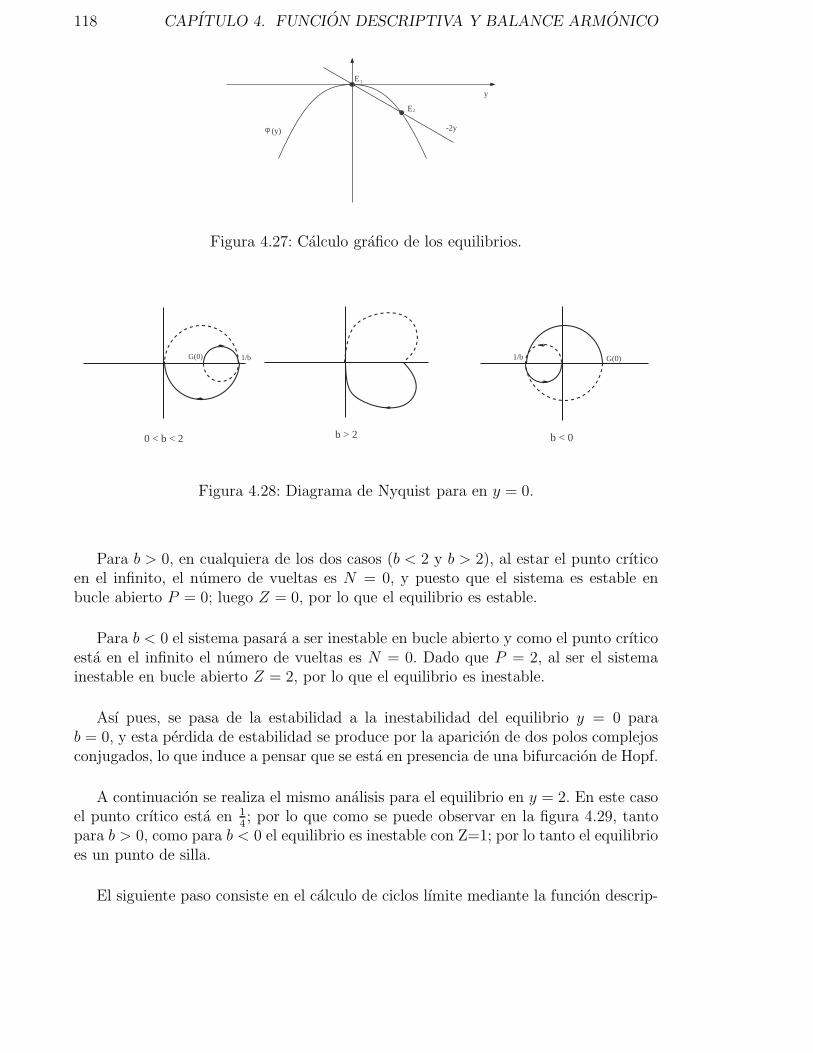
118 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
-2yf (y)
E
E
2
1
y
Figura 4.27: Calculo grafico de los equilibrios.
1/bG(0)
0 < b < 2 b > 2
1/b G(0)
b < 0
Figura 4.28: Diagrama de Nyquist para en y = 0.
Para b > 0, en cualquiera de los dos casos (b < 2 y b > 2), al estar el punto crıticoen el infinito, el numero de vueltas es N = 0, y puesto que el sistema es estable enbucle abierto P = 0; luego Z = 0, por lo que el equilibrio es estable.
Para b < 0 el sistema pasara a ser inestable en bucle abierto y como el punto crıticoesta en el infinito el numero de vueltas es N = 0. Dado que P = 2, al ser el sistemainestable en bucle abierto Z = 2, por lo que el equilibrio es inestable.
Ası pues, se pasa de la estabilidad a la inestabilidad del equilibrio y = 0 parab = 0, y esta perdida de estabilidad se produce por la aparicion de dos polos complejosconjugados, lo que induce a pensar que se esta en presencia de una bifurcacion de Hopf.
A continuacion se realiza el mismo analisis para el equilibrio en y = 2. En este casoel punto crıtico esta en 1
4; por lo que como se puede observar en la figura 4.29, tanto
para b > 0, como para b < 0 el equilibrio es inestable con Z=1; por lo tanto el equilibrioes un punto de silla.
El siguiente paso consiste en el calculo de ciclos lımite mediante la funcion descrip-

4.4. LA FUNCION DESCRIPTIVA DUAL 119
1/bG(0)
1/4 1/2
1/b G(0)
b < 0
1/4
b > 0
Figura 4.29: Diagrama de Nyquist para y = 2.
tiva dual . Para la funcion y2 la funcion descriptiva queda de la forma:
N0 = −a0 − a21
2a0
N1 = −2a0.
Se observa que, al ser una no linealidad estatica, la funcion descriptiva no dependede ω, pero sı de los parametros a0 y a1. La ecuacion de balance armonico es:
a0[N0G(0) + 1] = 0 (4.38)
N1G(jω) + 1 = 0. (4.39)
Despejando de las ecuaciones anteriores se tiene que para a0 �= 0 de la ecuacion(4.38) se obtiene:
1
2(−a0 − a2
1
2a0) + 1 = 0 (4.40)
y de (4.39)
−2a0G(jω) + 1 = 0 (4.41)
Si se resuelve graficamente la ecuacion (4.41) para los casos estudiados en el analisisde equilibrios (figura 4.30), se obtiene que la funcion descriptiva de la no linealidad secorresponde con − 1
N1= 1
2a0
Observando la figura 4.30 se deduce que solo existe ciclo lımite para los valores deb tales que 0 < b < 2 y, segun el criterio de Nyquist generalizado, dicho ciclo lımitees inestable. El corte entre el diagrama de Nyquist y la funcion descriptiva se producepara 1
2a0= 1
bcon una frecuencia de ω =
√2 − b.

120 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
1/b
G(0)
1/2
1/b G(0)
0 < b < 2 b > 2 b < 0
Figura 4.30: Resolucion grafica para diferentes valores de b.
Resolviendo la ecuacion (4.40) para calcular la amplitud del ciclo lımite se obtieneque esta es:
a1 =
√2b− b2
2.
Por lo tanto, y a modo de resumen, puede decirse que el sistema presenta unabifurcacion de Hopf subcrıtica en b = 0 de donde nace un ciclo lımite que va creciendoen amplitud hasta que choca con el punto de silla, produciendose una bifurcacionhomoclina en b = 2 (que coincide con ω = 0) y desapareciendo el ciclo lımite. Estopuede verse de manera mas clara en el diagrama de bifurcaciones que se presenta en lafigura 4.31.
2
b2
y
Figura 4.31: Diagrama de bifurcaciones del sistema.
Por lo expuesto anteriormente el ciclo lımite inestable deberıa existir hasta queb = 2. Sin embargo, por simulacion se obtiene que ese ciclo lımite desaparece a partir

4.5. CALCULO DE VARIOS ARMONICOS EN EL METODO DE BALANCE ARMONICO121
de b = 0,36, valor sensiblemente inferior al obtenido por el metodo de la funciondescriptiva.
Esta discrepancia es debida a la interaccion del ciclo lımite con la variedad establedel punto de silla, lo que hace que el ciclo lımite se achate y que los armonicos de ordensuperior a uno tengan un mayor peso en su descripcion.
Ası pues, tal y como se expuso en un primer momento, el metodo de la funciondescriptiva reproduce relativamente bien el comportamiento cualitativo del sistema(de hecho se ha detectado una bifurcacion de caracter global, como es la homoclina,de una manera sencilla), pero, para un ajuste mas fino, se ha de recurrir a otro tipo deanalisis o bien a calcular los armonicos de orden superior.
4.5. Calculo de varios armonicos en el metodo de
balance armonico
Como se ha expuesto en la seccion anterior, el metodo de la funcion descriptivatiene caracter aproximado y se muestra insuficiente para describir los ciclos lımitecuando estan lejos de su nacimiento. Para solucionar este problema, como primeraaportacion original a esta tesis, se presenta un metodo para el calculo de un numeroarbitrario de armonicos en un sistema con no linealidad estatica [SAA98a], [SAA98b].
En primer lugar se presenta una descripcion de la notacion y procedimientos aseguir.
El sistema no lineal objeto de estudio es el representado en la figura 4.32.
+
-G(s)
r u y
f ( . )
Figura 4.32: Sistema no lineal.

122 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
Si xp(t) es una solucion periodica de periodo T = 2πω
, entonces puede ser desarrolladaen series de Fourier, obteniendose la expresion:
xp(t) =x0√2
+
∞∑k=1
[xck cos(kωt) + xs
ksen(kωt)].
Normalmente se utiliza una version truncada a N terminos del desarrollo anterior:
xN (t) =x0√
2+
N∑k=1
[xck cos(kωt) + xs
ksen(kωt)].
Descrita la orbita periodica de esta forma, la bondad de la aproximacion depen-dera de:
El numero de armonicos N utilizados.
Caracterısticas de filtrado del sistema: El sistema lineal debe filtrar la mayorparte de los armonicos de orden superior a N para que la aproximacion sea lomas precisa posible.
La aproximacion sera tanto peor cuanto mas bruscos sean los cambios producidosen ϕ(y) en funcion de las variaciones de y.
Para el sistema de la figura 4.32 se puede expresar la salida y(t) en funcion de sudesarrollo en series de Fourier en su forma truncada en N armonicos:
yN(t) =y0√2
+
N∑k=1
[yck cos(kωt) + ys
ksen(kωt)]
La entrada del sistema, suponiendo referencia nula, es u = −ϕ(y), con lo quesustituyendo yN(t) en la expresion anterior:
−ϕ(yN(t)) =u0√
2+
∞∑k=1
[uck cos(kωt) + us
ksen(kωt)].
Notese que el hecho de que yN(t) este truncada en N armonicos no implica queϕ(yN(t)) tambien lo este, ya que es el desarrollo en series de Fourier de una ondadistinta. Llamaremos uN(t) al truncamiento de −ϕ(yN(t)) en N armonicos:
uN(t) =u0√
2+
N∑k=1
[uck cos(kωt) + us
ksen(kωt)]

4.5. CALCULO DE VARIOS ARMONICOS EN EL METODO DE BALANCE ARMONICO123
Dado un numero determinado de armonicos N , se define en primer lugar la funcionvectorial:
FN (θ) ∈ IR1×(2N+1),
que es la compuesta por el termino de continua y los cosenos y senos de los diferentesarmonicos a considerar.
FN (θ)=[1√2, cos(θ), sen(θ), . . . , cos(Nθ), sen(Nθ)].
Se definen los vectores Y , y U como los vectores de dimension 2N+1 que contienenlos coeficientes del desarrollo en series de Fourier truncado en N armonicos de la salidayN(t) y la entrada uN(t) al sistema respectivamente.
Y T = [y0, yc1, y
s1, . . . , y
cN , y
sN ]
UT = [u0, uc1, u
s1, . . . , u
cN , u
sN ].
Ası, multiplicando cada uno de los vectores columna anteriores por la funcion vec-torial FN (ωt) se obtienen los desarrollos truncados de la salida y la entrada:
yN(t) = FN (ωt)Y
uN(t) = FN(ωt)U .
Supongase una senal de entrada periodica definida por el vector columna UN conN armonicos de entrada. Se introduce esta senal en el sistema lineal y se obtiene unasenal de salida periodica truncada tambien en N armonicos YN (figura 4.33).
G(s)U Y
Figura 4.33: Relacion entre los armonicos de entrada y de salida.
Suponiendo que la matriz A del sistema no tiene autovalores en el eje imaginario,dado que el sistema es lineal, la relacion entre los armonicos de entrada U y los desalida Y sera tambien lineal y puede ser expresada por la matriz:
Y = HGU ,
donde
HG =
⎡⎢⎢⎢⎢⎢⎣
G(0) 0 0 . . . 00 H1 0 . . . 00 0 H2 . . . 0...
......
. . ....
0 0 0 . . . HN
⎤⎥⎥⎥⎥⎥⎦ .

124 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
Las matrices Hk ∈ R2×2 se definen como:
Hk =
[Re(G(kωj)) Im(G(kωj))
−Im(G(kωj)) Re(G(kωj))
]con Hk =
[Re(G(kωj)) Im(G(kωj))
−Im(G(kωj)) Re(G(kωj))
]
Realimentando la salida, suponiendo referencia nula y volviendo a obtener la senalde entrada, se obtiene una relacion entre la salida y la entrada (figura 4.34).
ϕ(·)U Y
Figura 4.34: Realimentacion de la salida para dar la entrada.
La obtencion de los armonicos de entrada en funcion de los de salida se hara apli-cando balance armonico, es decir:
U=
⎡⎢⎢⎢⎢⎢⎢⎢⎣
u0
uc1
us1...uc
N
usN
⎤⎥⎥⎥⎥⎥⎥⎥⎦=− 2
T
∫ T
0
ϕ(yN(t))
⎡⎢⎢⎢⎢⎢⎢⎢⎣
1√2
cos(ωt)sen(ωt)
...cos(Nωt)sen(Nωt)
⎤⎥⎥⎥⎥⎥⎥⎥⎦dt.
Usando la notacion descrita anteriormente y, realizando el cambio de variables θ =ωt, la ecuacion anterior se puede expresar:
U = −1
π
∫ 2π
0
ϕ(F (θ)Y )F T (θ)dθ. (4.42)
Sustituyendo la relacion entre los armonicos de entrada y los de salida a traves dela parte lineal del sistema en la ecuacion anterior se obtiene la ecuacion de balancearmonico:
U = −1
π
∫ 2π
0
ϕ(F (θ)HGU)F T (θ)dθ (4.43)
que permite calcular, con una aproximacion de N armonicos, la frecuencia y amplitudde los ciclos lımite existentes en el sistema.
Volviendo sobre el ejemplo propuesto en el apartado 4.4.1, la resolucion de las ecua-ciones de balance armonico tambien puede hacerse a partir de la formulacion generalde la ecuacion de balance armonico (4.43).

4.5. CALCULO DE VARIOS ARMONICOS EN EL METODO DE BALANCE ARMONICO125
Si en al ecuacion (4.42) se premultiplican ambos miembros de la igualdad por lamatriz HG queda:
HGU = Y = −HG
π
∫ 2π
0
ϕ(F (θ)Y )F T (θ)dθ.
Tomando el origen de tiempo de manera que la senal periodica de salida se puedaexpresar como:
y(t) =a0√2
+ asenθ.
Sustituyendo en la ecuacion anterior y truncando el desarrollo en el primer armonico:⎛⎝ a0
0a
⎞⎠ = −HG
π
∫ 2π
0
ϕ(a0√2
+ asenθ)F T (θ)dθ,
donde, desarrollando la no linealidad y tomando solo el primer armonico:
ϕ(a0√2
+ asenθ) = −(a2
0
2+a2
2+
2a0a√2
senθ),
con lo que
⎡⎣ a0
0a
⎤⎦=
HG
π
∫ 2π
0
⎡⎢⎢⎣
1√2(
a20
2+ a2
2+ 2a0a√
2senθ)
(a20
2+ a2
2+ 2a0a√
2senθ) cos θ
(a20
2+ a2
2+ 2a0a√
2senθ)senθ
⎤⎥⎥⎦ dθ.
Integrando esta ecuacion y teniendo en cuenta que HG vale
HG =
⎡⎣ G(0) 0 0
0 Re(G(jω)) Im(G(jω))0 −Im(G(jω)) Re(G(jω))
⎤⎦
se obtiene el sistema de ecuaciones:
a0 =G(0)√
2(a2
0 + a2)
0 = Im(G(jω))2a0a√
2
a = Re(G(jω))2a0a√
2
que es igual al formado por las ecuaciones (4.40) y (4.41) escaladas en√
2 y descom-puestas en parte real e imaginaria.

126 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
4.5.1. Definicion del algoritmo
Para resolver la ecuacion de balance armonico para los N primeros armonicosse fija, en primer lugar, el origen de tiempos arbitrariamente de manera que el primercoeficiente del desarrollo en series de Fourier de la entrada uc
1 sea igual a cero.
A continuacion se usa un algoritmo iterativo para calcular los armonicos de ordensuperior a N = 1, suponiendo conocido el valor de ω y el de us
1 = a.
Para garantizar la convergencia del algoritmo se presenta la siguiente propiedad[Vid93]
Si para la frecuencia ω se cumple:
1.
max | G(kωj) |< 1
L, ∀k �= 1
donde L es una constante de Lipschitz de ϕ(.).
2. Existe
U =
⎡⎢⎢⎣a0
0aUs
⎤⎥⎥⎦
solucion de la ecuacion de balance armonico.
Entonces, el siguiente proceso iterativo converge a los armonicos superiores de dichaorbita periodica, es decir, U s
k −→ Us y u0k −→ a0:⎡⎢⎢⎣u0k+1
uc1
us1
Usk+1
⎤⎥⎥⎦=−1
π
∫ 2π
0
ϕ(F (θ)HG
⎡⎢⎢⎣u0k
0aUs
k
⎤⎥⎥⎦)F T (θ)dθ.
Bajo las hipotesis de la propiedad anterior, supongase que para ω y a se calculan,utilizando el metodo anteriormente descrito, a0 y los armonicos superiores Us:⎡
⎢⎢⎣u0
uc1
us1
Us
⎤⎥⎥⎦ = −1
π
∫ 2π
0
ϕ(F (θ)HG
⎡⎢⎢⎣u0
0aUs
⎤⎥⎥⎦)F T (θ)dθ,

4.5. CALCULO DE VARIOS ARMONICOS EN EL METODO DE BALANCE ARMONICO127
entonces la condicion para la existencia de una orbita periodica queda reducida a uc1 = 0
y us1 = a.
Para resolver estas ecuaciones, el algoritmo se aplica partiendo de un valor inicialdeterminado para las amplitudes de los armonicos superiores, y, a partir de ahı, se iterahasta conseguir que estos armonicos converjan hasta un valor determinado para cadavalor de ω y a de una malla previamente prefijada.
Los valores de uc1 y us
1 obtenidos para cada punto de la malla y solucion de laiteracion de los armonicos superiores se almacenan junto con los valores de ω y a ydichos armonicos, barriendose ası toda la malla.
Terminado el barrido, se halla el punto que tiene menor error entre los valorescalculados de uc
1 y us1 y los valores necesarios para la existencia de solucion periodica,
realizandose a continuacion un barrido en una malla mas fina alrededor de dicho punto.
En caso de que el error en las igualdades uc1 = 0 y us
1 = a fuera demasiado alto elalgoritmo supondra que no existe orbita periodica para ese par (ω, a).
4.5.2. Resultados
A continuacion se exponen los resultados de la aplicacion del algoritmo dedeteccion de orbitas periodicas con N armonicos al sistema de la figura 4.26 conN = 20y se comparan los resultados obtenidos con la orbita periodica obtenida de la aplicacionde la funcion descriptiva (N = 1) para diferentes valores del parametro b.
b = 0,05
Para este valor de b la amplitud del ciclo lımite ha de ser pequena ya que dichaamplitud crece con el valor de b al haberse producido una bifurcacion de Hopf en elorigen.
En la figura 4.35 se muestra con el sımbolo ”+.en rojo el ciclo lımite obtenido delalgoritmo con N = 1 y con lınea continua la evolucion del sistema en el espacio deestados. Notese que el ciclo lımite que se obtiene es inestable, lo cual no es problemapara el metodo del balance armonico, ya que este metodo solo resuelve la ecuacion debalance armonico sin analizar su estabilidad, pero para la representacion del espaciode estados se ha utilizado la integracion hacia “atras” en el tiempo para poder ver elciclo lımite.
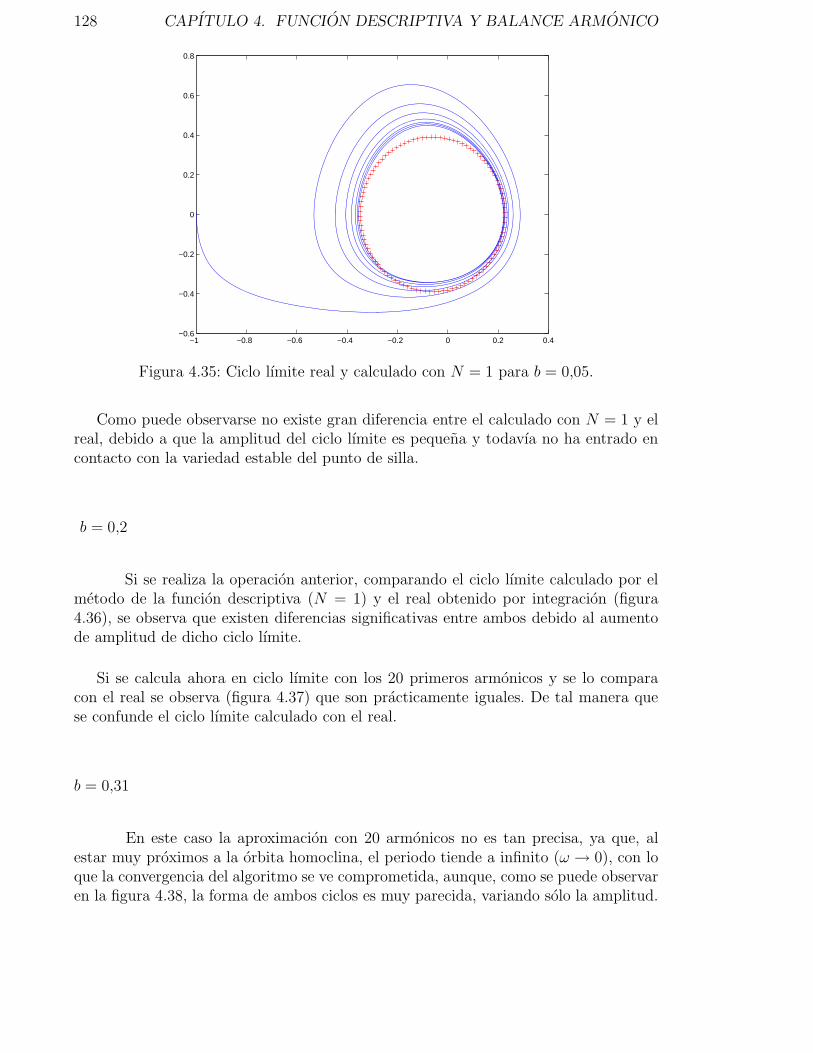
128 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Figura 4.35: Ciclo lımite real y calculado con N = 1 para b = 0,05.
Como puede observarse no existe gran diferencia entre el calculado con N = 1 y elreal, debido a que la amplitud del ciclo lımite es pequena y todavıa no ha entrado encontacto con la variedad estable del punto de silla.
b = 0,2
Si se realiza la operacion anterior, comparando el ciclo lımite calculado por elmetodo de la funcion descriptiva (N = 1) y el real obtenido por integracion (figura4.36), se observa que existen diferencias significativas entre ambos debido al aumentode amplitud de dicho ciclo lımite.
Si se calcula ahora en ciclo lımite con los 20 primeros armonicos y se lo comparacon el real se observa (figura 4.37) que son practicamente iguales. De tal manera quese confunde el ciclo lımite calculado con el real.
b = 0,31
En este caso la aproximacion con 20 armonicos no es tan precisa, ya que, alestar muy proximos a la orbita homoclina, el periodo tiende a infinito (ω → 0), con loque la convergencia del algoritmo se ve comprometida, aunque, como se puede observaren la figura 4.38, la forma de ambos ciclos es muy parecida, variando solo la amplitud.

4.5. CALCULO DE VARIOS ARMONICOS EN EL METODO DE BALANCE ARMONICO129
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figura 4.36: Ciclo lımite real y calculado con N = 1 para b = 0,2.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figura 4.37: Ciclo lımite real y calculado con N = 20 para b = 0,2.

130 CAPITULO 4. FUNCION DESCRIPTIVA Y BALANCE ARMONICO
−1.4 −1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4−1
−0.5
0
0.5
1
1.5
Figura 4.38: Ciclo lımite real y calculado con N = 20 para b = 0,31.
Se ha probado tambien el algoritmo para un valor de b superior al de bifurcacion,obteniendose, para este caso, un ciclo lımite calculado para N = 1 y no hallandoseninguno para una aproximacion con armonicos de orden superior.

Bibliografıa
[Ath75] D.P. Atherton. Nonlinear Control Enginnering: Describing function analysisand design. Van Nostrand Reinhold, 1975.
[Coo94] P. Cook. Nonlinear dynamical systems. Prentice-Hall, 1994.
[Cue00] F. Cuesta. Analisis de Estabilidad de Sistemas Borrosos Multivariables.Aplicacion al Control reactivo de Robots Moviles. PhD thesis, ESI. Sevilla,2000.
[Glo89] J.N. Glover. Hopf bifurcations at infinity. Nonlinear Analysis. Theory,Methods & Applications, 13(12):1393–1398, 1989.
[GV68] A. Gelb and W. Vander Velde. Multiple-Input Describing Functions andNonlinear Systema Design. McGraw-Hill Book Company, 1968.
[LP97] J. Llibre and E. Ponce. Hopf bifurcation from infinity for planar controlsystems. Publicacions Matematiques, UAB, Barcelona, (41):181–198, 1997.
[LP98] J. Llibre and E. Ponce. Bifurcation of a periodic orbit from infinity in planarpiecewise linear vector fields. Nonlinear Analysis TMA, 36(5):623–653, 1998.
[SAA98a] F. Salas, T. Alamo, and J. Aracil. Deteccion de orbitas periodicas en sistemasno lineales. In XIX Jornadas de Automatica, 1998.
[SAA98b] F. Salas, T. Alamo, and J. Aracil. Deteccion of periodic orbits in nonlinearsystems. In Niconet Workshop on numerical software in control engenieer-ing, 1998.
[Sal95] F. Salas. Estudio de la dinamica de un oscilador electronico del tipo van derpol-duffing. Proyecto Final de Carrera, 1995.
[Vid93] M. Vidyasagar. Nonlinear Systems Analysis. Prentice-Hall, 2 edition, 1993.
131

132 BIBLIOGRAFIA
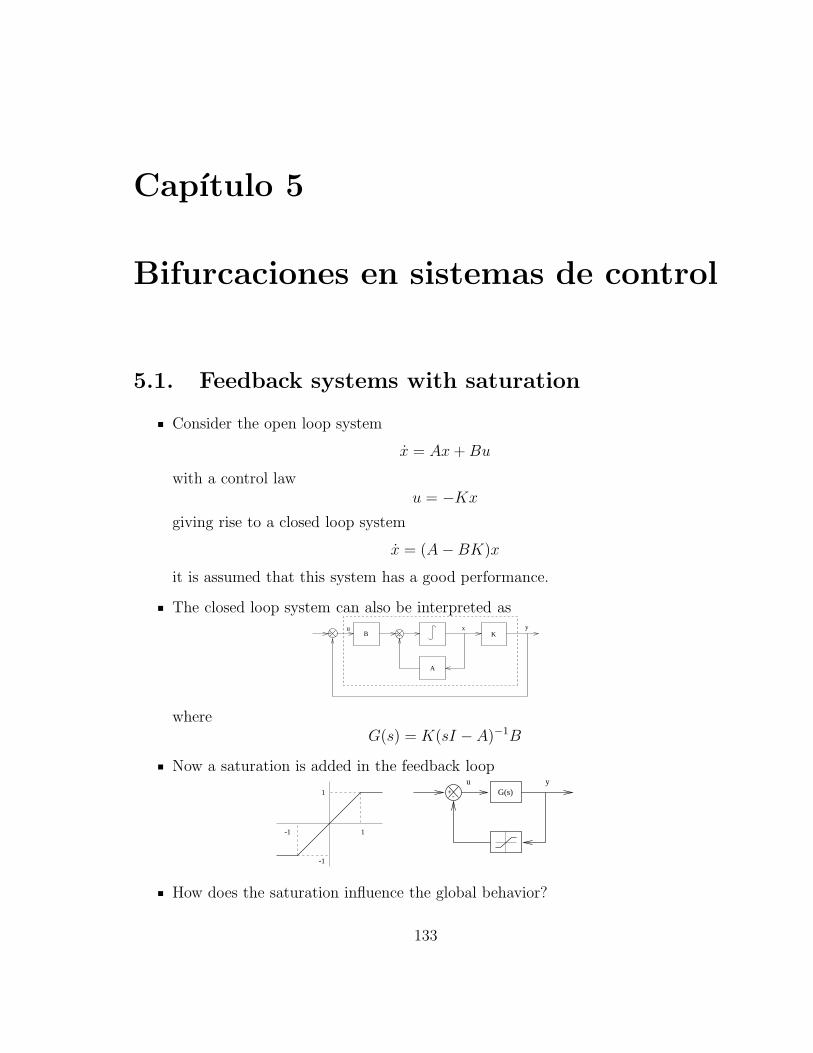
Capıtulo 5
Bifurcaciones en sistemas de control
5.1. Feedback systems with saturation
Consider the open loop system
x = Ax+Bu
with a control lawu = −Kx
giving rise to a closed loop system
x = (A−BK)x
it is assumed that this system has a good performance.
The closed loop system can also be interpreted as
-+ ++B
A
Ku x y
whereG(s) = K(sI − A)−1B
Now a saturation is added in the feedback loop
+yu
G(s)
1
1
-1
-1
-
How does the saturation influence the global behavior?
133
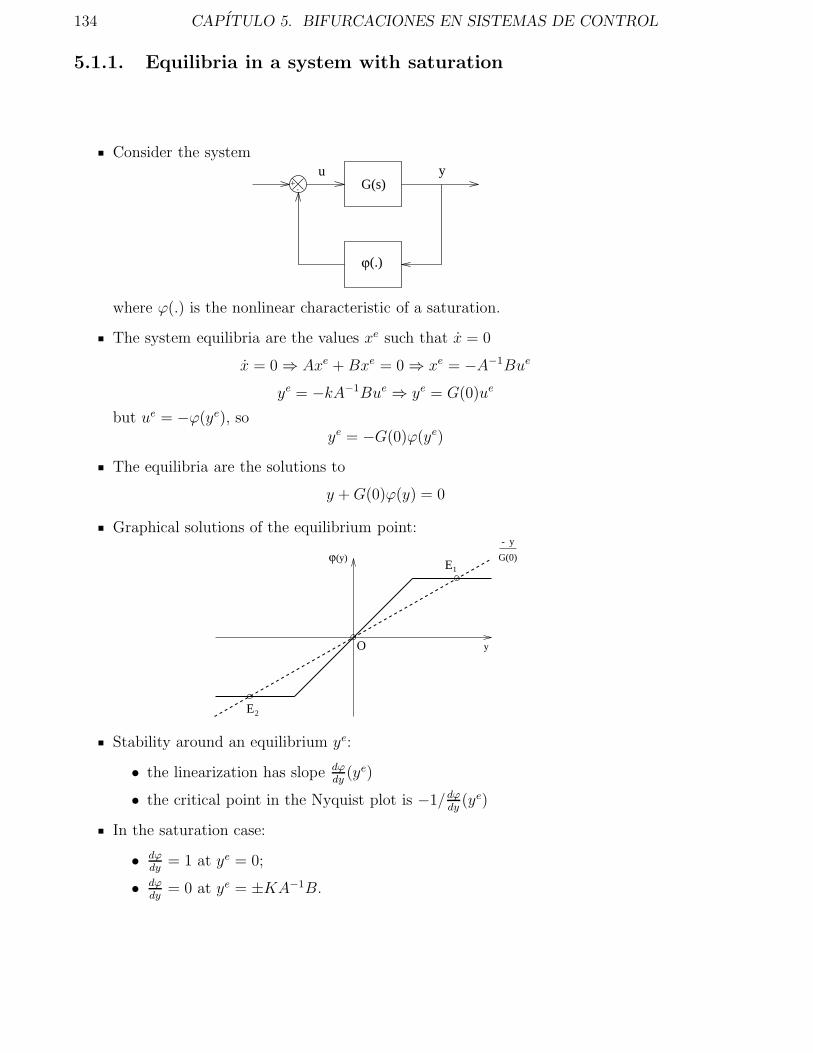
134 CAPITULO 5. BIFURCACIONES EN SISTEMAS DE CONTROL
5.1.1. Equilibria in a system with saturation
Consider the system
-+
(.)ϕ
yG(s)
u
where ϕ(.) is the nonlinear characteristic of a saturation.
The system equilibria are the values xe such that x = 0
x = 0 ⇒ Axe +Bxe = 0 ⇒ xe = −A−1Bue
ye = −kA−1Bue ⇒ ye = G(0)ue
but ue = −ϕ(ye), soye = −G(0)ϕ(ye)
The equilibria are the solutions to
y +G(0)ϕ(y) = 0
Graphical solutions of the equilibrium point:
(y)ϕ- y
G(0)
y
E
E
O
2
1
Stability around an equilibrium ye:
• the linearization has slope dϕdy
(ye)
• the critical point in the Nyquist plot is −1/dϕdy
(ye)
In the saturation case:
• dϕdy
= 1 at ye = 0;
• dϕdy
= 0 at ye = ±KA−1B.

5.1. FEEDBACK SYSTEMS WITH SATURATION 135
5.1.2. Limit cycles in a system with saturation
Occurrence of periodic orbits using the describing function method.
Describing function for the normalized saturation is
N(a) =
{1 if 0 ≤ a ≤ 12π
(sin−1 1
a+ 1
a
√1 − 1
a2
)if a > 1
To predict limit cycles the following equation must be solved
1 +N(a)G(jω) = 0
This equation can be solved graphically with a Nyquist plot where G(jω) and−1/N(a) are represented.
5.1.3. First order system
Consider the system with the open loop transfer function
G(s) =k
s+ a
Characteristic polynomial at the origin
p(s) = s+ a + k
• if −k < a the origin is stable,
• for −k = a there is an stability boundary,
• if −k > a the origin is unstable,

136 CAPITULO 5. BIFURCACIONES EN SISTEMAS DE CONTROL
0
0 0
0
μ
-1
φ(
y-1 1
1
0e
1e
y)
y =0
G (0)>0μ
G (0)<0μ
e y =-G (0)2
y =G (0)
G (0)<-1μ
-1
G (0) μ
y(t)
G (0) μμG (0)
μ
Qualitative Analysis
Bifurcation set in the parameter plane (a, k).
−3 −2 −1 0 1 2 3
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
real G(jw)
imag
.G(jw
)
−2 −1.5 −1 −0.5 0 0.5 1
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
real G(jw)
imag
.G(jw
)
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5
real G(jw)
imag
.G(jw
)
−2 −1.5 −1 −0.5 0 0.5 1
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
real G(jw)
imag
.G(jw
)
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
real G(jw)
imag
.G(jw
)
−2 −1.5 −1 −0.5 0 0.5−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
real G(jw)
imag
.G(jw
)
oo
UNSTABLE
0
(-1,0)
(-1,0)
(-1,0)
(-1,0)
(-1,0)
(-1,0)
-1/N(A)
G(jw)
-1/N(A)
G(jw)
G(jw)
-1/N(A)
G(jw)
-1/N(A)
G(jw)
-1/N(A)
G(jw)
u
s
-1/N(A)
G(0)
o
GLOBAL
G(0)
w=ooG(0)G(0)
LOCALSTABILITY
G(0)
P
G(0)
P
P
oo
oPu
C1
STABILITY
k=-a
s
a
k
Bifurcation diagram with delay. (a) 0 < k. (b) k < 0.
equilibrium pointsunstablestable equilibrium points
uPo Po
s
-1
1
a-k
y
k = constant
ea)
0 a
1
-1
-k
y
k = constant
sPe
b)oo
0
uPoo

5.2. SOTOMAYOR-LLIBRE-PONCE BIFURCATION ANALYSIS 137
5.1.4. Second-order system
Consider the open loop second-order system
x =
[0 1
−a2 −a1
]x+
[01
]u
with a control law
u = −Kx = − [k2 k1
]x
The open loop transfer function is
G(s) =k1 + k2s
s2 + a1s+ a2
Closed-loop characteristic polynomial
p(s) = s2 + α1s+ α2 = s2 + (a1 + k2)s+ (a2 + k1)
Polar plot
k 1
a 2 a 1
k 2
(-1,0) a 1
k 2k 1
a 2
2
1
ka
k
2
1a < 2
1
kaa
k
2
1 =k
2
1a
2
1
ka>
a 1
k 2 k 1
a 2(-1,0) = (-1,0)
A saturation is added in the feedback path
5.2. Sotomayor-Llibre-Ponce bifurcation analysis
Qualitatively different state portraits in each region of the parameter plane(a1, a2)

138 CAPITULO 5. BIFURCACIONES EN SISTEMAS DE CONTROL
B
PPP
DSC
a 2
a 1
D
B A
C
D C
AB
In all cases the origin remains stable.
The boundaries between these regions are given by bifurcations:
• a pitchfork bifurcation at infinity P∞;
• a Hopf bifurcation at infinity B∞; and
• a double saddle connection (DSC) bifurcation.

5.2. SOTOMAYOR-LLIBRE-PONCE BIFURCATION ANALYSIS 139
5.2.1. Frequency domain interpretation of the Llibre-Ponce
bifurcation analysis
a2
a 1
III3
I1
IVIII
I1
k 1
a 2(-1,0)
I3
IVk 1
a 2(-1,0)
k 1
a 2 a 1
k 2
(-1,0)=
k 1
a 2 a 1
k 2
(-1,0)
III
k 1
a 2a 1
k 2
(-1,0)
II
I2
k 1
a 2 a 1
k2(-1,0)
a 1
k2k 1
a 2(-1,0)
=
DSC
I2
DSC
There are four different regions.
5.2.2. Bounded attraction basin
State portrait in region II, with bounded attraction basin

140 CAPITULO 5. BIFURCACIONES EN SISTEMAS DE CONTROL
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
For large enough disturbances the system is out of control
0 0.5 1 1.5 2 2.5 3−2
−1
0
1
2
3
4
5
6
t
a
b
5.3. Control systems with a delay
Consider the systeme-Ls
φ(
y(t)
s + a________
-
r = 0 +k
y)
u(t)
The equilibrium points are the same as without delay.
How does the delay affect the bifurcation diagram of the system without delay?

5.3. CONTROL SYSTEMS WITH A DELAY 141
5.3.1. Qualitative Analysis
Bifurcation set in the parameter plane (a, k).
o
o
o
o
u
s
P
Ps
s
-5 -4 -3 -2 -1 0 1 2-1
-0.5
0
0.5
1
1.5
2
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-5 -4 -3 -2 -1 0 1 2 3 4-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-5 -4 -3 -2 -1 0 1 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-5 -4 -3 -2 -1 0 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
−2 −1.5 −1 −0.5 0 0.5 1−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
real G(jw)
imag
.G(jw
)
−5 −4 −3 −2 −1 0 1−1
−0.5
0
0.5
1
1.5
2
real G(jw)
imag
.G(jw
)−5 −4 −3 −2 −1 0 1 2
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
real G(jw)
imag
.G(jw
)
H
C
P
o
StableLocal
0
L = 1s
STABILITY
P0
-1
DSC
= 0
ω
2
uP
Lπ
2 L
π
a
UNSTABLE
GLOBAL
k
La =
ω0
0
1C
u
Bifurcation diagram with delay. (a) 1/L < k < π/2L. (b) k > π/2L.
stable equilibrium pointsunstable equilibrium points
stable limit cycles
1L
1L
-a =
π2L
k >
1L
-a =
uPoo
-1
-k
1
y ea)
sHo
< k < π2L
a-1
-k a
y
1
eb)
sHo
00
uPo
Pou
Poou
5.3.2. A second-order system
Consider the system,
-Lse________ _________ s + as
r = 0
-
+
φ ( y)
k (s+k )iy(t)u(t)

142 CAPITULO 5. BIFURCACIONES EN SISTEMAS DE CONTROL
formed by a PI + a first order system with a delay.
The open loop transfer function is
G(s) =k(s+ ki)e
−Ls
s(s+ a)
5.3.3. Qualitative Analysis
Bifurcation set in the parameter plane (a, k).
oo
-2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
��������
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1-5
-4
-3
-2
-1
0
1
2
3
4
5
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-2 -1.5 -1 -0.5 0 0.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
-8 -7 -6 -5 -4 -3 -2 -1 0 1-5
-4
-3
-2
-1
0
1
2
3
4
5
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
����
−2 −1.5 −1 −0.5 0 0.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Diagrama de Nyquist
real G(jw)
imag
.G(jw
)
i
-12 -10 -8 -6 -4 -2 0-5
-4
-3
-2
-1
0
1
2
3
4
5
real G(jw)
imag
.G(jw
)
Diagrama de Nyquist
k = 1
u
s
H
Ho
k
a
LOCAL
T
oH u
UNSTABLE
L = 0.1 s
STABILITY
GLOBALSTABILITY
NS
L
00
ω maxθ
=0
SLC
ω
Bifurcation diagram for k > 0: (a) L = 0; (b) L > 0.
unstable equilibrium points
unstable limit cyclesstable equilibrium points stable limit cyclesstable periodic orbits
y
-1
1
ueH
s
oo
Ho
b)
k= constant
1
-1
u
y
k= constant
H ea) oo
a a-k -k 00

5.4. SUMMARY OF PREVIOUS RESULTS 143
5.4. Summary of previous results
Global perspective on the behavior modes of a class of nonlinear control systems.
Depending on G(0) and of ϕ(y) equilibria other than the origin can appear.
• Multiple equilibria when G(0) < −1
• Limit cycles when G(jω) crosses −1/N(a).
Bifurcations occur when the system is open loop unstable.