aplicación de metodologías y modelos espaciales de...
TRANSCRIPT



Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 3
Producto 4 Introducción
METODOLOGÍAS DE ANÁLISIS ESPACIAL DEL RIESGO.
La vigilancia epidemiológica fitosanitaria en el país ha tenido un crecimiento importante en los últimos dos años, en el uso de herramientas geoinformáticas, es decir Sistemas de Información Geográfica (SIG), Percepción Remota (PR) y Geoposicionamiento Global (GPS). Los ejemplos más representativos a nivel estatal son: Sistema de Alerta Fitosanitaria del Estado de Guanajuato (SIAFEG) y Sistema de Alerta Fitosanitaria del Estado de Sonora (SIAFESON). A nivel Nacional, el Sistema Nacional de Vigilancia Epi-demiológica Fitosanitaria (SINAVEF) ha hecho de las tecnologías de Información Geográfica uno de sus principales pilares para el análisis y vigilancia del país, respecto a la sanidad vegetal se trata.
Uno de los productos más desarrollados por el SINAVEF, son los mapas de riesgo epidemiológicos, dis-eñados a partir de la metodología usada por Magarey et al (2007a) donde a través de sobreposición de capas de información, específicamente hospedantes y confort térmico, se generan los mapas de riesgo a plagas agrícolas. A esta metodología, se incorporo el uso de modelos espaciales, como el de máxima entropía, GARP y multicriterio, además de incorporarse el uso de imágenes de satélite de diferentes es-calas y resoluciones.

4.1 Mapas de riesgo

Producto 4.1 Mapas de riesgo
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 7
Los mapas de riesgo tienen como objetivo ubicar sitios potenciales para la presencia de plagas regla-mentadas y reconocer la intensidad probabilística de daño, con el fin de establecer medidas fitosanitarias preventivas. Además, de ubicar las zonas agrícolas de los principales sistema producto en riesgo, definir los hospederos potenciales, reconocer las condiciones físicas-climáticas óptimas en donde las plagas se reproducen y habitan, identificar las zonas que cumplan condiciones de confort térmico para cada plaga y localizar las principales zonas dañadas por la posible afectación de la plaga y cuantificar el daño (económico-ambiental).
El uso de mapas de riesgo, ofrece una visión integrada de qué, cuándo y dónde provienen y pueden afectar las plagas, dando la posibilidad de reconocer los sitios que podrían ser dañados, pasando de es-quemas reactivos a acciones preventivas. Estos mapas pueden complementar y fortalecer los Análisis de Riesgo de Plagas (ARP) y forman parte inherente de los Reportes Epidemiológicos de Plagas Agrícolas (REPA).
La información para la elaboración de los mapas de riesgo se obtiene de diferentes fuentes de infor-mación como Crop Protection Compendium (CPC), Global Pest and Disease Database, NAPPFAST (CAP 50 & 150 Pest Matrix), NAPIS, EPPO y NAPPO. En estas bases de datos se encuentran tanto plagas ausentes como presenten en el país. Específicamente para las plagas internas, se puede recurrir a la información de SENASICA o directamente en las NOM´s. Para los posibles puntos de ingreso se usa la base de datos del SIAP, sobre el seguimiento oportuno de comercio exterior, donde se registra el tipo de material vegetal que ingresa, la cantidad y su origen. La información específica para cada mapa esta descrita en el siguiente cuadro:
Cuadro 1. Fuentes de información para mapas de riesgo.
Institución Tipo de información Aplicación EscalaServicio de Información Agroalimentaria y Pesquera (SIAP)
Sistema - producto Mapa de hospedero Municipal
Servicio Nacional de Sanidad Inocuidad y Calidad Agroalimentaria (SENASICA)
Muestreos fitosanitarios Mapas de riesgo y confort - confiabilidad Local 1:5,000
Servicio Meteorológico Nacional (SMN) Datos climáticos
Mapa de GDD, Confort y condiciones ambientales
óptimasLocal 1:20,000
Instituto Nacional de Estadística y Geografía (INEGI)
Mapas básicos y temáticos Todos los mapas
Municipal 1:50,000Estatal 1:100,000
Regional 1:250,000Nacional 1:500,000
Instituto de Geografía (UNAM)
Imágenes NOAA - AVHRR NDVI y Temperatura del suelo Nacional 1:2,000,000
Inventario Nacional Forestal - 2001 Hospederos silvestres y cultivados Nacional 1:1,000,000
Atlas Nacional de México Todos los mapas Nacional 1:4,000,000Secretaría de Marina (SEMAR) Imágenes SPOT 5 Mapa de hospederos,
confort Local 1:5,000

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo8
Hospederos
Este mapa define la densidad relativa de cultivos hospedantes susceptibles a plagas que potencialmente se pueden establecer en ellos. Para la creación de estos mapas se utilizaron las bases de datos del SIAP (http://www.siap.gob.mx/index.php?idCat=107) que reporta 50 sistemas producto del país. Esta información es exclusiva para cultivos agrícolas, señala superficie sembrada y cosechada, rendimientos, productividad y se reporta para cada municipio del país. Para conocer los hospederos de cada plaga se consulto el Inventario Nacional de Plaga, el Crop Protection Compendium y literatura científica. La escala de los mapas de hospederos esta divida en 10 rangos, diferenciados por la cantidad de superficie sem-brada.
Grados días de desarrollo y días favorables
El potencial para que se reproduzca la plaga está determinado por los grados días de desarrollo (Artrópo-dos) o por el número de días favorables (Patógenos) para la infección. Estos conceptos se basan en las condiciones climáticas, básicamente a la exposición del frío o calor de un insecto o patógeno, durante un tiempo determinado. Para generar los mapas de GDD o DF se considera la temperatura base (TB) infe-rior y superior umbral. Los datos climáticos para elaborar los mapas se obtuvieron de diferentes fuentes de información científicas y del Insect Development Database (NAPPFAST, 2007). Las bases de datos climáticos del país se obtuvieron del ERIC III y de servidor climático INIFAP, donde la información fue interpolada y relacionada con los datos del Cuadro 2, según la plaga que correspondiera. En MATLAB se programo a través de fórmulas para obtener los grados días mensuales y acumulados por estación, posteriormente se interpolaron en un SIG para su representación.
Cuadro 2. Umbrales climáticos por plaga.
Nombre científico TB TmaxD Top Tdf GDD - DF HR Fuente
Brenneria rubrifaciens 39 30 - 33 24 - 39
Burkholderia gladioli 30
Cactoblastis cactorum 13.3 34 30 18-34 845 - 1387
Ceroplastes japonicus 12 35 800
Clavibacter michiganensis subsp. michiganensis
2 4 36 > 80%
Clavibacter michiganensis subsp. sepedonicus
21 5 Nelson, 1984.
Curtobacterium flaccumfaciens pv. flaccumfaciens
> 30
Dickeya chrysanthemi 20 28 - 32
Ditylenchus destructor 5 34 20 - 27 90%
Drosophila suzukii 18 - 36
Dytylenchus dipsaci 13 22 57 - 70%
Epiphyas postvittana (7.5) (31.5) 20 (642) 70% Danthanarayana, 1975.
Euplatypus segnis 10 105

Producto 4.1 Mapas de riesgo
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 9
Nombre científico TB TmaxD Top Tdf GDD - DF HR Fuente
Fusarium oxysporum f.sp. cubense raza 4 8 38 27
Globodera rostochiensis 4.4 15 650-830 Evans, 1968.
Grapholita molesta 9 (7.20) 36 (32.2) 15 383 (507) < 70% Croft et al.,1980.
Helicoverpa armigera 13.8 36 33.9 402 Younis et al., 1993.
Liriomyza huidobrensis 8.1 20 - 27 280.3 74% Lanzoni et al., 2002.
Lobesia botrana 8 (10) 30 (34) 26 - 29 10 - 30 430 40 - 70% Touzeau, 1981.
Maconellicoccus hirsutus 14.5 39.5 27 - 29 363
Meloidogyne chitwoodi 4 - 6 600 - 800Charchar et al., 2001.
Moniliophthora perniciosa 10 30 20 - 30 80
Polyscytalum pustulans 15 - 16 > 85% Ellis, 1976.
Phakopsora pachyrhizi 15 28 23 Marchettie, 1976.
Phytophthora ramorum 15 27.5 23
Pseudomonas viridiflava 4 37
Puccinia graminis 4 29 23.5 Cooke et al., 2006.
Puccinia kuehnii 20 - 30 26 97
Ralstonia solanacearum raza 2, 3 y 4
40 35 - 37 Talbot, 2004.
Raoiella indica 25 - 30 88 - 92%Muraleedharan, 1981.
Rhynchophorus ferrugineus 17.4 40 28 - 32 1590 Li, 2010.
Synchytrium endobioticum 15 12 - 24 Hampson, 1996.
Tilletia indica 15-20 8 - 20 > 80% Singh et al., 1990.
Xanthomonas campestris pv. armoraciae
5 40 24 - 30 > 50% Schaad, 1982.
Xylella fastidiosa 12 37 17 - 25 Feil, 1990.
Tb: temperatura base, TmaxD: temperatura máxima de desarrollo, Top: Temperatura óptima, Tdf: tem-peratura favorable, GDD – DF: Grados días de desarrollo – Días Favorables, HR: humedad relativa.

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo10
Condiciones ambientales óptimas
Las condiciones ambientales se obtuvieron de reportes epidemiológicos, fichas técnicas y de literatura en general, donde se identifico características ambientales que intervienen en el establecimiento de las pla-gas y enfermedades, como tipo de suelo, altitud, vegetación, sequía, entre otros. En caso de reconocerse variables (ambientales) que influyen en la localización de una plaga se recopilo cartografía temática de diferentes fuentes (INEGI, CONABIO, etc.). Con métodos de decisión multicriterio aplicados en SIG, se extrajeron cada una de las variables, dándoles rangos de decisión, a partir de eso se genero un índice que mostraba el nivel de influencia de cada mapa temático. Este mapa fue aplicado solo a las plagas que tenían este tipo de información.
Índice de confort
El índice de confort está compuesto por los mapas de grados días de desarrollo o días favorables y condiciones ambientales óptimas. Con decisión multicriterio en SIG se hace operaciones para establecer la relación entre estas dos capas de información, generando un índice. Este mapa está basado en el con-cepto de la comodidad o de la sensación agradable que tiene el insecto o el patógeno para establecerse y reproducirse. Sólo se aplico este índice a la lista de plagas que contaban con condiciones ambientales óptimas.
Mapas de riesgo
Los mapas de riesgo se elaboraron a partir de la sobreposición de los hospederos y el índice de confort (si existiera) o el de grados días desarrollo – días favorables. La sobreposición fue resultado de un análisis multicriterio, generando un índice de riesgo, donde el valor cercano a uno representa el nivel más alto de riesgo y el cero el nivel menor o nulo de riesgo.
Se diseñaron 37 mapas de riesgo, con sus respec-tivos mapas de hospederos y mapas de confort o grados días de desarrollo – días favorables. De este total, el 33% corresponden a insectos, el 24% a bacterias, 28% a hongos, 11% nematodos, y 2% ácaros y virus. De estas número de plagas, 24 se encuentran ausentes (no hay registros 21 y con reg-istros no validos tres), erradicados dos, presentes sólo en algunas zonas y bajo control oficial ocho, y presentes encontradas en cultivos protegidos tres.
Esto indica que de los mapas de riesgo con la característica particular de estar presentes en el país es el 30% del total de mapas y el resto se encuentra ausente o erradicado.
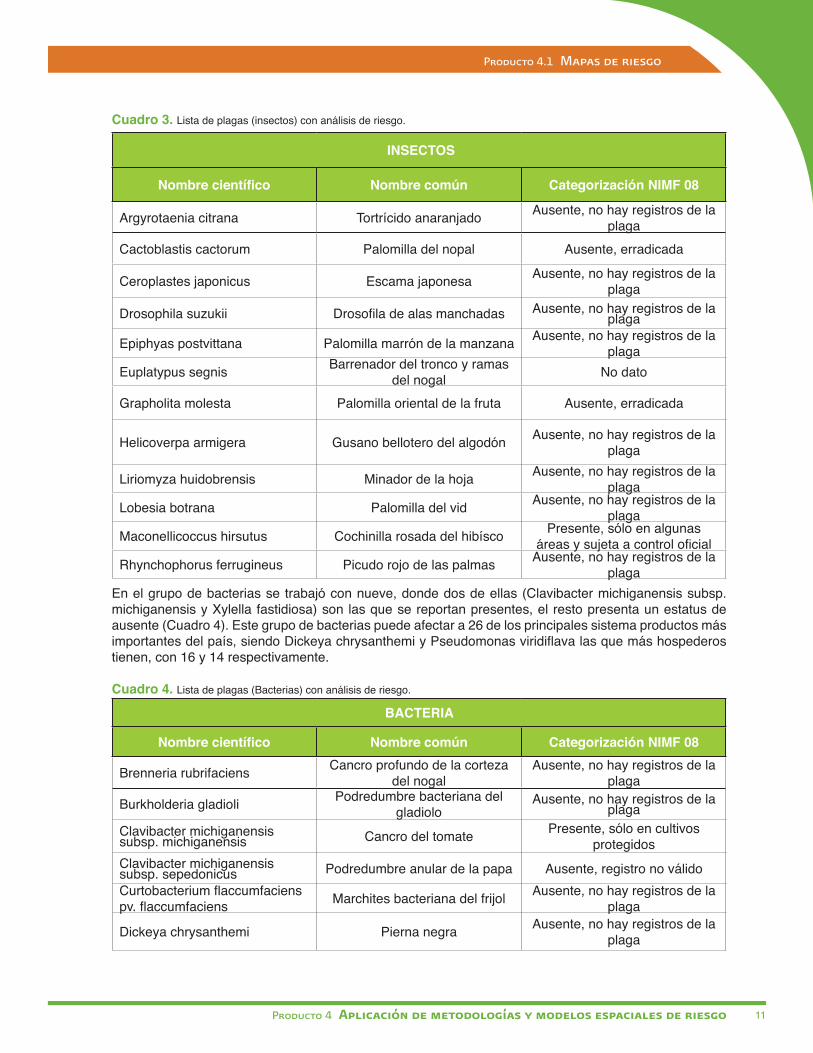
Para el grupo de insectos se diseño 12 mapas de riesgos, donde sólo uno se reporta como presente (restringido a unas áreas y bajo control oficial) Maconellicoccus hirsitus, dos fueron erradicados y el resto presenta un estatus de ausente y sin ningún registro (Cuadro 3). El SIAP en su página de internet (http://www.siap.gob.mx/) reporta los 50 principales cultivos de importancia económica para el país, de ese número de cultivos, los insectos reportados en la Cuadro 3 afecta a 33 de ellos, siendo Maconellicoccus hirsitus y Helicoverpa armígera los que más afectan con 26 y 14 respectivamente.
Producto 4.1 Mapas de riesgo
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 11
Cuadro 3. Lista de plagas (insectos) con análisis de riesgo.
INSECTOS
Nombre científico Nombre común Categorización NIMF 08
Argyrotaenia citrana Tortrícido anaranjado Ausente, no hay registros de la plaga
Cactoblastis cactorum Palomilla del nopal Ausente, erradicada
Ceroplastes japonicus Escama japonesa Ausente, no hay registros de la plaga
Drosophila suzukii Drosofila de alas manchadas Ausente, no hay registros de la plaga
Epiphyas postvittana Palomilla marrón de la manzana Ausente, no hay registros de la plaga
Euplatypus segnis Barrenador del tronco y ramas del nogal No dato
Grapholita molesta Palomilla oriental de la fruta Ausente, erradicada
Helicoverpa armigera Gusano bellotero del algodón Ausente, no hay registros de la plaga
Liriomyza huidobrensis Minador de la hoja Ausente, no hay registros de la plaga
Lobesia botrana Palomilla del vid Ausente, no hay registros de la plaga
Maconellicoccus hirsutus Cochinilla rosada del hibísco Presente, sólo en algunas áreas y sujeta a control oficial
Rhynchophorus ferrugineus Picudo rojo de las palmas Ausente, no hay registros de la plaga
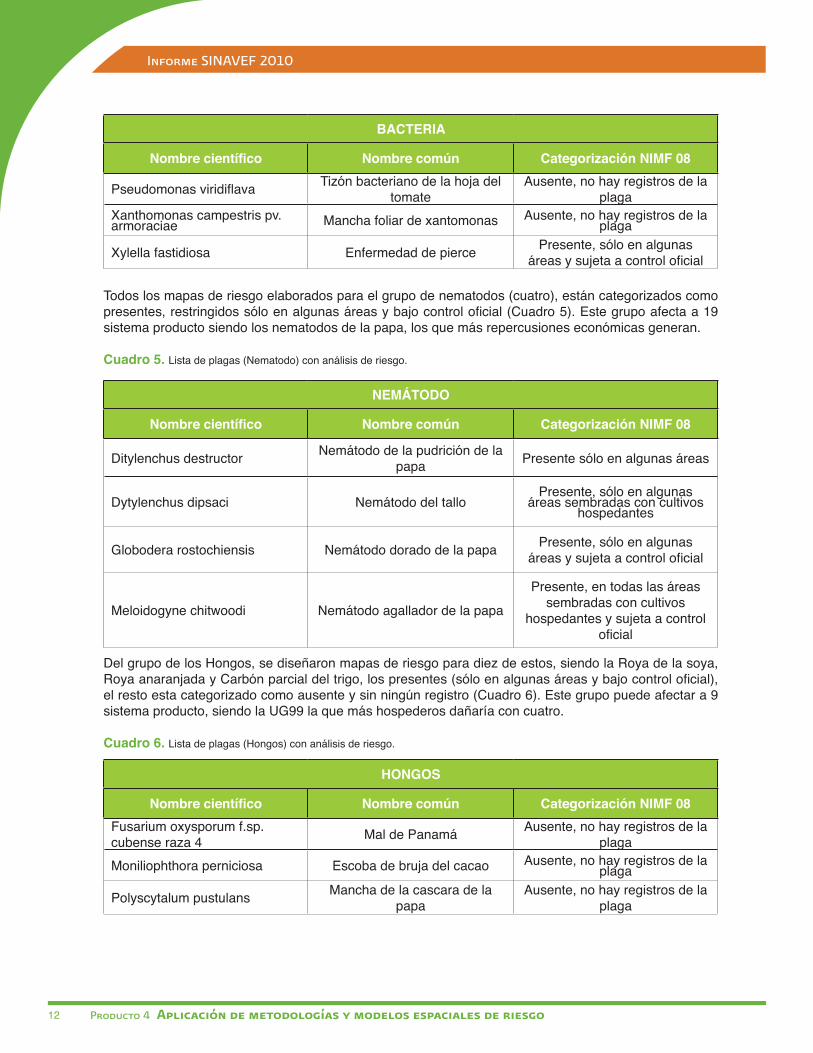
En el grupo de bacterias se trabajó con nueve, donde dos de ellas (Clavibacter michiganensis subsp. michiganensis y Xylella fastidiosa) son las que se reportan presentes, el resto presenta un estatus de ausente (Cuadro 4). Este grupo de bacterias puede afectar a 26 de los principales sistema productos más importantes del país, siendo Dickeya chrysanthemi y Pseudomonas viridiflava las que más hospederos tienen, con 16 y 14 respectivamente.
Cuadro 4. Lista de plagas (Bacterias) con análisis de riesgo.
BACTERIA
Nombre científico Nombre común Categorización NIMF 08
Brenneria rubrifaciens Cancro profundo de la corteza del nogal
Ausente, no hay registros de la plaga
Burkholderia gladioli Podredumbre bacteriana del gladiolo
Ausente, no hay registros de la plaga
Clavibacter michiganensis subsp. michiganensis Cancro del tomate Presente, sólo en cultivos
protegidosClavibacter michiganensis subsp. sepedonicus Podredumbre anular de la papa Ausente, registro no válidoCurtobacterium flaccumfaciens pv. flaccumfaciens Marchites bacteriana del frijol Ausente, no hay registros de la
plaga
Dickeya chrysanthemi Pierna negra Ausente, no hay registros de la plaga
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo12
BACTERIA
Nombre científico Nombre común Categorización NIMF 08
Pseudomonas viridiflava Tizón bacteriano de la hoja del tomate
Ausente, no hay registros de la plaga
Xanthomonas campestris pv. armoraciae Mancha foliar de xantomonas Ausente, no hay registros de la
plaga
Xylella fastidiosa Enfermedad de pierce Presente, sólo en algunas áreas y sujeta a control oficial
Todos los mapas de riesgo elaborados para el grupo de nematodos (cuatro), están categorizados como presentes, restringidos sólo en algunas áreas y bajo control oficial (Cuadro 5). Este grupo afecta a 19 sistema producto siendo los nematodos de la papa, los que más repercusiones económicas generan.
Cuadro 5. Lista de plagas (Nematodo) con análisis de riesgo.
NEMÁTODO
Nombre científico Nombre común Categorización NIMF 08
Ditylenchus destructor Nemátodo de la pudrición de la papa Presente sólo en algunas áreas
Dytylenchus dipsaci Nemátodo del talloPresente, sólo en algunas
áreas sembradas con cultivos hospedantes
Globodera rostochiensis Nemátodo dorado de la papa Presente, sólo en algunas áreas y sujeta a control oficial
Meloidogyne chitwoodi Nemátodo agallador de la papa
Presente, en todas las áreas sembradas con cultivos
hospedantes y sujeta a control oficial
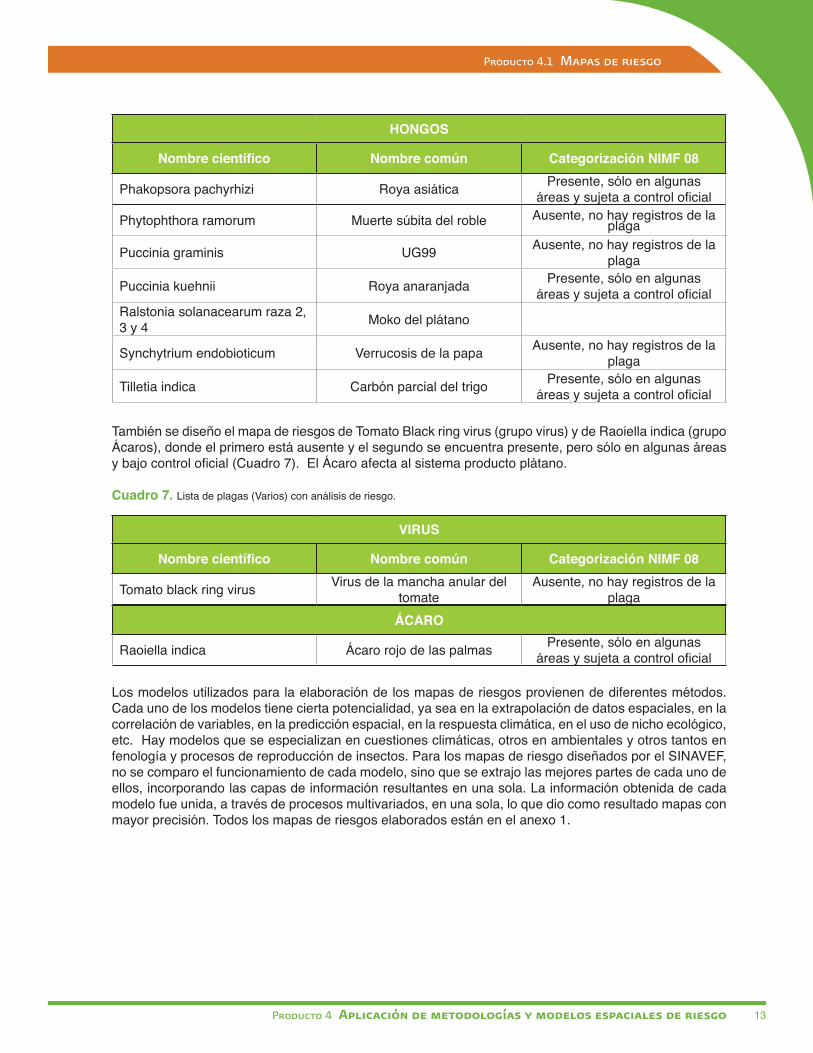
Del grupo de los Hongos, se diseñaron mapas de riesgo para diez de estos, siendo la Roya de la soya, Roya anaranjada y Carbón parcial del trigo, los presentes (sólo en algunas áreas y bajo control oficial), el resto esta categorizado como ausente y sin ningún registro (Cuadro 6). Este grupo puede afectar a 9 sistema producto, siendo la UG99 la que más hospederos dañaría con cuatro.
Cuadro 6. Lista de plagas (Hongos) con análisis de riesgo.
HONGOS
Nombre científico Nombre común Categorización NIMF 08Fusarium oxysporum f.sp. cubense raza 4 Mal de Panamá Ausente, no hay registros de la
plagaMoniliophthora perniciosa Escoba de bruja del cacao Ausente, no hay registros de la
plaga
Polyscytalum pustulans Mancha de la cascara de la papa
Ausente, no hay registros de la plaga
Producto 4.1 Mapas de riesgo
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 13
HONGOS
Nombre científico Nombre común Categorización NIMF 08
Phakopsora pachyrhizi Roya asiática Presente, sólo en algunas áreas y sujeta a control oficial
Phytophthora ramorum Muerte súbita del roble Ausente, no hay registros de la plaga
Puccinia graminis UG99 Ausente, no hay registros de la plaga
Puccinia kuehnii Roya anaranjada Presente, sólo en algunas áreas y sujeta a control oficial
Ralstonia solanacearum raza 2, 3 y 4 Moko del plátano
Synchytrium endobioticum Verrucosis de la papa Ausente, no hay registros de la plaga
Tilletia indica Carbón parcial del trigo Presente, sólo en algunas áreas y sujeta a control oficial
También se diseño el mapa de riesgos de Tomato Black ring virus (grupo virus) y de Raoiella indica (grupo Ácaros), donde el primero está ausente y el segundo se encuentra presente, pero sólo en algunas áreas y bajo control oficial (Cuadro 7). El Ácaro afecta al sistema producto plátano.
Cuadro 7. Lista de plagas (Varios) con análisis de riesgo.
VIRUS
Nombre científico Nombre común Categorización NIMF 08
Tomato black ring virus Virus de la mancha anular del tomate
Ausente, no hay registros de la plaga
ÁCARO
Raoiella indica Ácaro rojo de las palmas Presente, sólo en algunas áreas y sujeta a control oficial
Los modelos utilizados para la elaboración de los mapas de riesgos provienen de diferentes métodos. Cada uno de los modelos tiene cierta potencialidad, ya sea en la extrapolación de datos espaciales, en la correlación de variables, en la predicción espacial, en la respuesta climática, en el uso de nicho ecológico, etc. Hay modelos que se especializan en cuestiones climáticas, otros en ambientales y otros tantos en fenología y procesos de reproducción de insectos. Para los mapas de riesgo diseñados por el SINAVEF, no se comparo el funcionamiento de cada modelo, sino que se extrajo las mejores partes de cada uno de ellos, incorporando las capas de información resultantes en una sola. La información obtenida de cada modelo fue unida, a través de procesos multivariados, en una sola, lo que dio como resultado mapas con mayor precisión. Todos los mapas de riesgos elaborados están en el anexo 1.


Mapas de diagnóstico4.2

Producto 4.2 Mapas de diagnóstico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 17
Una parte significativa del interés humano se ha enfocado en representar su organización espacial. Las cosas u objetos que lo rodean, mejor conocidos como fenómenos geográficos, son procesos de diferente índole (culturales, sociales, económicos, físicos, políticos, etc.) que suceden dentro de un espacio, se modifican y modifican su propio entorno, de ahí la importancia de su representación. Además, conocer exactamente la ubicación de donde ocurren esos fenómenos ayuda a entender los procesos de interac-ción entre el medio y el hombre. Por tal motivo, el interés de cartografiar los fenómenos fitosanitarios es de suma importancia para el SINAVEF, ya que ubicarlos espacialmente hace que se cree un análisis del motivo de su aparición, de las condiciones del medio para que se haya presentado, las medidas que se pueden tomar para eliminar el problema, entre otros. Así, la estandarización de la presentación cartográfica hace que la información sea más legible, clara y atractiva para el usuario, cumpliendo con la transmisión de la información del último eslabón de la cadena Informativa. Los mapas de diagnóstico nacional e internacional deben ser un referente para ubicar, y así poder analizar, las principales plagas que afectan al mundo y como estas pueden presentar un riesgo para México. Además, con el desarrollo de la cartografía se cumple la vigilancia externa, que está orientada a la obtención y registro de la infor-mación fitosanitaria internacional.
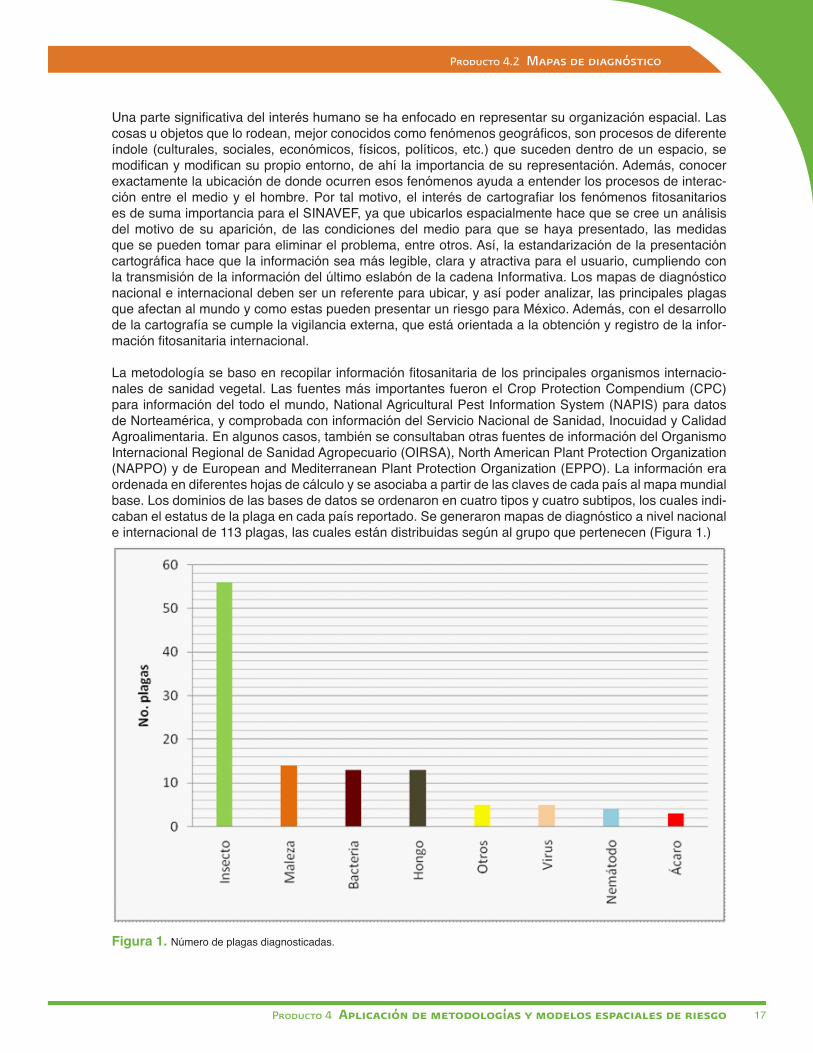
La metodología se baso en recopilar información fitosanitaria de los principales organismos internacio-nales de sanidad vegetal. Las fuentes más importantes fueron el Crop Protection Compendium (CPC) para información del todo el mundo, National Agricultural Pest Information System (NAPIS) para datos de Norteamérica, y comprobada con información del Servicio Nacional de Sanidad, Inocuidad y Calidad Agroalimentaria. En algunos casos, también se consultaban otras fuentes de información del Organismo Internacional Regional de Sanidad Agropecuario (OIRSA), North American Plant Protection Organization (NAPPO) y de European and Mediterranean Plant Protection Organization (EPPO). La información era ordenada en diferentes hojas de cálculo y se asociaba a partir de las claves de cada país al mapa mundial base. Los dominios de las bases de datos se ordenaron en cuatro tipos y cuatro subtipos, los cuales indi-caban el estatus de la plaga en cada país reportado. Se generaron mapas de diagnóstico a nivel nacional e internacional de 113 plagas, las cuales están distribuidas según al grupo que pertenecen (Figura 1.)
Figura 1. Número de plagas diagnosticadas.
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo18
Diagnóstico de HLB
El Huanglongbing (HLB) es una de las enfermedades más destructivas que actualmente tienen los cítri-cos en el mundo. Producida por al menos tres especies de bacterias del género Candidatus Liberibacter, que no han podido ser cultivadas artificialmente, y que están limitadas al floema de las plantas (Floyd et al, 2006). En el norte del continente americano, predomina Candidatus Liberibacter asiaticus, que es transmitida por el vector Diaphorina citri y que afecta a todas las variedades de cítricos comerciales. La enfermedad puede tener una diseminación rápida, que es difícil de controlar y disminuye la vida útil de la planta, tanto jóvenes como adultas. El HLB se detectó por primera vez en México en julio del 2009, en la localidad del Cuyo, municipio de Tzimín, Yucatán. Para diciembre del mismo año, se tenía reportes en 12 municipios de cuatro estados. Actualmente se reportan en 84 municipios de los estados de Jalisco, Nayarit, Colima, Sinaloa, Michoacán, Campeche, Yucatán y Quintana Roo con positivos a Candidatus Liberibacter (Anexo 2). En cambio, la D. citri se reportó en 2002, en el estado de Campeche, hoy se en-cuentra en los 23 estados citrícolas del país, aunque sólo en los estados afectados por HLB se reportaran psílidos positivos a la bacteria (DGSV. 2010).
Los principales mecanismos de dispersión del HLB son a través del insecto vector y por la movilización de material vegetal propagativo infectado. Este último, según datos del Análisis de Riesgo de Plagas (ARP) elaborado por el SENASICA, establece que el HLB tiene probabilidades de dispersarse en el país, ya que existe una amplia zona de hospederos (526 mil hectáreas de cítricos), se movilizan (interno – externo) grandes cantidades de material propagativo vegetal, no tiene estacionalidad, tanto la bacteria como el vector pueden sobrevivir a diferentes condiciones de transporte y almacenamiento, no existe un trata-miento para eliminarlo y tienen una alta adaptabilidad al medio ambiente. También existen mecanismos naturales de dispersión, donde se ha establecido que el viento es uno de los más importantes para el psílido. Por las características biológicas de D. citri, su desplazamiento por sí solo no es representativo, pero cuando una tormenta tropical o huracán se presenta, influye en la dispersión y provoca un escenario de alto riesgo. En este sentido, México recibió 16 de estos fenómenos por el lado del Pacífico y siete por el Golfo de México y el Caribe, en el periodo de 2006 – 2009, por lo que existe la posibilidad de dispersión del psílido, provenientes de países como Cuba, Republica Dominicana, Belice y E.U.A. (Florida, Lousiana y Texas) lugares que son afectados continuamente por huracanes y que sus masas de aire circulan con dirección hacia las zonas citrícolas de la Península de Yucatán y de la Planicie del Golfo de México. Por el lado del Pacífico, los huracanes tienen pocas posibilidades de transportar psílidos infectivos a la parte continental, ya que la mayoría se forma en el océano y no atraviesan otros países. Por esta razón, se de-duce que la presencia de HLB en Nayarit, Colima y Jalisco se debió a la movilización de material vegetal infectado. Esta hipótesis se respalda por el hecho de la cercanía con Puerto Vallarta y Manzanillo, puntos de ingreso de mercancías agropecuarias de importación.
En México, los cítricos se cultivan principalmente en tres regiones ecológicas: en selvas cálido-húmedas (66.1%), selvas cálido-secas (21.1%) y en las grandes planicies (12.8%). Esto nos indica que la mayor parte de la citricultura (87.2%) del país se desarrolla sobre ambientes tropicales cálidos. Estos eco-sistemas, en los últimos años han sido impactados ambientalmente, sobre todo por la deforestación y la sequía. Según datos históricos, en el país se ha presentado sequía fuerte y severa en el 73% de las áreas selváticas (NCDC. 2010). Una de las consecuencias ambientales de la sequía es el estrés de la vegetación (falta de acción fotosintética por escaces de humedad) por lo que los cultivos tienden a pre-sentar signos de enfermedad cuando ya están infectadas o a ser vulnerables cuando todavía no lo están. Con esto se establece la hipótesis de que el HLB se manifiesta cuando el índice de sequía aumenta. Las condiciones de temperatura se mantendrán anómalas hasta el mes de mayo o junio, con + 1.2° C. La precipitación disminuirá en la mayor parte del país, en los meses de marzo, abril, y mayo, con porcen-tajes superiores al 40%, coincidiendo con brotaciones de primavera que son favorables para el desarrollo del psílido, por lo que podría manifestarse el HLB más ampliamente en sitios ya afectados (CONAGUA, 2010).

Producto 4.2 Mapas de diagnóstico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 19
Hasta ahora, el HLB ha presentado un comportamiento espacial específico, ya que las detecciones se han hecho sobre selvas con sequías fuertes y sobre una franja latitudinal entre los 17°30´ y 22°30´norte, donde entran hasta ahora todos los municipios con positivos a la bacteria. Con esto se puede deducir que sitios con estas condiciones presentan mayor riesgo a ser afectadas o a mostrar síntomas en caso de que ya hayan sido infectadas. En el caso de las zonas citricolas del norte del país los muestreos llevados acabo en la frontera norte (Mexicali y Tecate, BC.) no han presentado síntomas al HLB.
El monitoreo de psílidos infectados en los municipios afectados se hace a partir de la dirección de los vientos. Jalisco y Nayarit, la dirección del viento predominante en marzo y abril de 2010 es hacia la porción oriente del país, teniendo posibles deposiciones en la parte del Golfo de México. Estas condicio-nes de viento se han mantenido desde principios de febrero, por lo que puede implicar movilización de vectores hacia zonas continentales. En la península de Yucatán, el viento tiene dirección predominante desde el mes de enero de N-S, con posible movilización de vector hacia el sur de Quintana Roo. En las nuevas detecciones del estado de Campeche, los vientos pueden transportar psílidos hacia la parte norte de Belice, sin afectaciones al país (SCOPE. 2010). Las condiciones climáticas de estos sitios van a mantenerse hasta finales de abril, según datos del Servicio Meteorológico Nacional, y a pesar de que no se tiene reportado ninguna tormenta tropical o huracán en los próximos dos meses, se recomienda darle seguimiento. Todos los mapas que muestran la diseminación de la bacteria y la propagación del vector, se encuentran en el anexo 2.

4.3 Mapas de pronóstico

Producto 4.3 Mapas de pronostico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 23
Los métodos de pronóstico para la distribución geográfica de especies son importantes para una varie-dad de aplicaciones en ecología y conservación. Aunque también se ha aplicado a estudios aplicados a la propagación de especies invasoras, impactos de cambio climático y patrones espaciales de especies (Phillips et al., 2008). Para trabajar con métodos de modelización se requieren un conjunto de ocur-rencias conocidas como variables predictivas, tales como información topográfica, climática, edafológi-ca, biogeográfica y de teledetección. Existen muchas técnicas para modelizar, que van desde modelos climáticos y de regresión logística, hasta los árboles de decisión multivariable y “Splins” de regresión. Los métodos de modelización son diferentes, trabajan de forma diferente, por lo que los resultados nunca son iguales entre ellos. Máxima entropía (Maxent) es un modelador que trabaja a partir del método gen-eral de predicción o inferencias a partir de información incompleta, siendo sus orígenes en la mecánica estadística. En estimación de máxima densidad de entropía, la verdadera distribución de una especie se representa como una distribución de probabilidad p sobre el conjunto x de los sitios del área de estudio. Por lo tanto asigna un valor p no negativo a cada sitio x y los valores p (x) suman uno. La distribución de probabilidad debe respetar una serie de limitaciones derivadas de la ocurrencia de datos. Las limitaciones se basan en la calidad y numero de variables ambientales (Phillips, 2006; y Phillips et al, 2008). Estas variables ambientales con las que trabaja maxent son de tipo continuo y categórica. El primero toma va-lores reales arbitrarios que corresponden a las cantidades medidas, como la altitud, la precipitación anual y la temperatura máxima; el tipo categórica toman sólo un número limitado de valores discretos, como el tipo de suelo o el tipo de vegetación (Phillips et al, 2008).
Aplicación de maxent a escala nacional e Internacional
El uso de maxent fue dirigido hacia conocer los sitios con similitudes climáticas para la reproducción o establecimiento de una plaga. Para ello se uso la base ya diseñada por Tellez et al. (2004), donde se creó un archivo ASCII que almacena 19 variables climáticas. Dichas variables se muestran en el siguiente cuadro:
Cuadro 1. Parámetros usados en el modelo de máxima entropía
No. Parámetros
1 Temperatura promedio anual
2 Oscilación diurna de la temperatura
3 Isotermalidad
4 Estacionalidad de la temperatura
5 Temperatura máxima promedio del periodo más cálido
6 Temperatura mínima promedio del periodo más frío
7 Oscilación anual de la temperatura
8 Temperatura promedio del trimestre más lluvioso
9 Temperatura promedio del trimestre más seco
10 Temperatura promedio del trimestre más cálido
11 Temperatura promedio del trimestre más frío
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo24
No. Parámetros
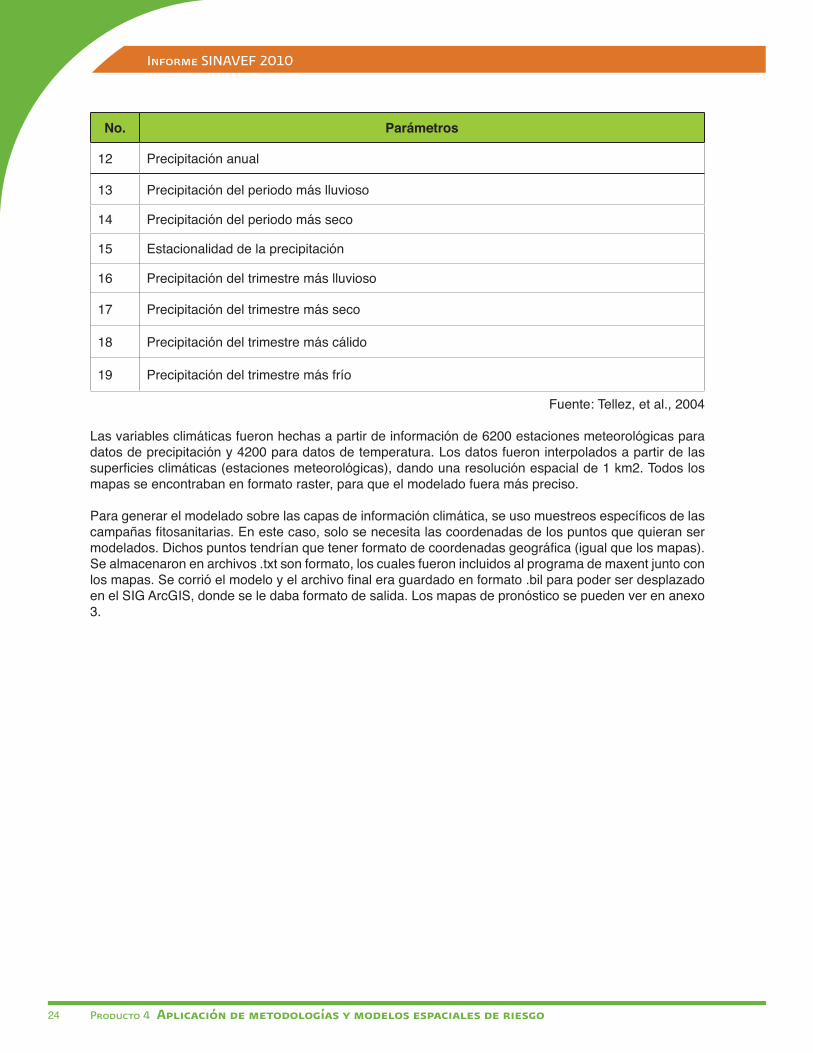
12 Precipitación anual
13 Precipitación del periodo más lluvioso
14 Precipitación del periodo más seco
15 Estacionalidad de la precipitación
16 Precipitación del trimestre más lluvioso
17 Precipitación del trimestre más seco
18 Precipitación del trimestre más cálido
19 Precipitación del trimestre más frío
Fuente: Tellez, et al., 2004
Las variables climáticas fueron hechas a partir de información de 6200 estaciones meteorológicas para datos de precipitación y 4200 para datos de temperatura. Los datos fueron interpolados a partir de las superficies climáticas (estaciones meteorológicas), dando una resolución espacial de 1 km2. Todos los mapas se encontraban en formato raster, para que el modelado fuera más preciso.
Para generar el modelado sobre las capas de información climática, se uso muestreos específicos de las campañas fitosanitarias. En este caso, solo se necesita las coordenadas de los puntos que quieran ser modelados. Dichos puntos tendrían que tener formato de coordenadas geográfica (igual que los mapas). Se almacenaron en archivos .txt son formato, los cuales fueron incluidos al programa de maxent junto con los mapas. Se corrió el modelo y el archivo final era guardado en formato .bil para poder ser desplazado en el SIG ArcGIS, donde se le daba formato de salida. Los mapas de pronóstico se pueden ver en anexo 3.



4.4 Modelado multivariable y de pronóstico

Producto 4.4 Modelado multivariable y de pronóstico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 29
Posiblemente, el aspecto más importante involucrado en el proceso lógico de planeación y administración de cualquier actividad basada en recursos naturales es la interpretación, medición e interrelación de una amplia gama de factores integrantes. La mayor parte de la información empleada en la toma de decisio-nes y planeación está referenciada espacialmente. La necesidad de desarrollar modelos espaciales para la toma de decisiones, ha generado el requerimiento de sistemas que posean la capacidad de manipular extensas bases de datos espaciales y temporales, al mismo tiempo permitir el análisis y modelaje alge-braico de éstas (FAO, 1999; Lindsay, S/F, citado en López, 2005).
A lo largo de la historia, con el propósito de eliminar o contrarrestar las pérdidas ocasionadas por las plagas, el ser humano ha desarrollado diversas tecnologías y ha implementado infinidad de programas de control. Dentro de esto, el desarrollo relativamente nuevo, de dos tecnologías de análisis de patrones espaciales, como los son los Sistemas de Información Geográfica (SIG) y la teledetección, ha abierto nuevos caminos en estudios de entomología aplicada. Los SIG han facilitado a entomólogos, ecólogos y demás interesados en la sanidad vegetal, el análisis de aquellos patrones espaciales complejos que pre-sentan una variación temporal. Tal vez, uno de los principales usos de los SIG dentro de la entomología aplicada está vinculado con el estudio de las relaciones entre las explosiones poblacionales de insectos (“outbreaks”) y las variables ambientales (Cigliano, 2003).
Dentro de muchas áreas de la ciencia se ha tratado de definir a los SIG de acuerdo a las aplicaciones que se le den. Existen términos globales en donde definen al SIG como un sistema de bases de datos en el cual la mayoría de los datos están referidos espacialmente, y operados por un conjunto de procedimien-tos para contestar preguntas sobre entidades espaciales de la base de datos (Smith, 1987; Burrough, 1986). También existen definiciónes más funcionales: conjunto integrado de medios y métodos infor-máticos, capaz de recoger, verificar, intercambiar, almacenar, gestionar, actualizar, manipular, recuperar, trasformar, analizar y mostrar datos espacialmente referenciados. Para este estudio, enfocándolo a cues-tiones entomológicas, el término de SIG es el que permiten integran bases de datos de las más diversas clases y fuentes, modelos de análisis de datos biofísicos, socioeconómicos, estadísticos, espaciales y temporales, sistemas de apoyo a la decisión, equipos y programas informáticos y los recursos humanos en el marco institucional donde opere el sistema. Una de las utilidades más importantes del SIG es su capacidad para elaborar modelos del mundo real a partir de las bases de datos digitales y utilizarlos para simular el efecto de un proceso específico en el tiempo para un determinado escenario. La construcción de modelos constituye un instrumento muy eficaz para analizar las tendencias y determinar los factores que influyen en ellas, o para exponer las posibles consecuencias de las decisiones o proyectos de plani-ficación que repercuten en la utilización y ordenación de los recursos (FAO, 1999).
Por otro lado, los modelos generados en un SIG deben de establecer un conjunto de relaciones que se utilizan para representar y estudiar de forma simple y comprensible una porción de la realidad empírica. Dicho de otra forma, es la representación simplificada de una realidad. Para que los modelos puedan decir algo del objeto que representan, es necesario construir una relación simétrica entre las realidades, es decir, la relación de correspondencia entre el objeto real y el modelo deben ser al menos parcialmente reversibles y permitir la traducción de algunas propiedades del modelo a la realidad. La mayoría de los modelos son estáticos, en donde las propiedades representadas permanecen con valores inmutables. Por ello, el uso de los modelos dinámicos o de simulación hacen acceder a la capacidad de experimentar independientemente del sistema real, permitiendo la independencia temporal y repetir el experimento el número de veces arbitrario (López, 2005).
Para determinar la presencia y distribución de las plagas se puede utilizar modelos multivariables, que son operaciones que nos permiten representar sistemas (abiertos o cerrados) y donde se pueden ob-servar las relaciones más o menos intensas y determinantes con un entorno en el cual es a veces difícil distinguirlos (abstraerlos, separarlos).
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo30
Sin embargo, sabemos que esos modelos son complejos por la gran cantidad de variables que se pueden utilizar y por supuesto esto dificulta tomar decisiones adecuadas para el control, la predicción o comporta-miento de los fenómenos naturales. Para ellos, el uso de los Sistemas de Información Geográfica ayuda a precisar la ubicación de los procesos y fenómenos geográficos, asimismo nos permiten observar interac-ciones entre estos procesos que modelan y dan un significado al espacio geográfico.
Al usar sistemas de información geográfica y la teledetección en los procesos de modelación, se debe enfocar el análisis de una forma espacialmente. El análisis espacial según Oliver Dollfus es fundamental para entender los procesos existentes dentro de una zona en particular, debido a cada elemento que la conforma es localizable y diferenciado, donde lo importante es su situación en relación a un conjunto, en el cual se inscribe y las relaciones que tiene con los diversos medios de los que forman parte (Santos, 2000). El análisis espacial es principal objeto de estudio de la geografía, es la plataforma de la que se parte para analizar todas las relaciones que se presentan en la superficie terrestre y está conformado por múltiples manifestaciones que es su propia espacialidad y temporalidad nos llevan a una totalidad en una proporción similar de la realidad.
El análisis espacial está conformado por cuatro premisas: Localización, que se refiere al ¿Dónde?; Cau-salidad, que hace referencia al ¿Por qué?; Temporalidad, refiriéndose al ¿Cuándo?; y Conectividad, al ¿Con quién más? Estos cuatro elementos están relacionados directamente entre ellos. Más técni-camente, la localización funciona por medio de las coordenadas geográficas, que son representados a través de líneas imaginarias (latitud, Longitud), puede presentar diferentes tipos de proyecciones de acuerdo a la ubicación del fenómeno y presenta escala, elementos que caracterizan el conocimiento cu-antitativo real del fenómeno. La causalidad da conocimiento de las causas y características del fenómeno de un espacio determinado, dando así la razón por la que sucede. La conectividad determina las caracter-ísticas principales del fenómeno y muestra su comportamiento en el lugar y en otros posibles escenarios parecidos, para con esto predecir escenarios futuros. La temporalidad es fundamental dentro del análisis geográfico, ya que implica la creación de escenarios y su constante renovación o transformación, dando así paso a la comparación entre fenómenos de un mismo espacio.
Incorporando el análisis espacial dentro de los sistemas de información geográfica, se puede hablar de diferentes fases en el proceso de análisis. Cuando se habla de inventarios en donde queda inmerso parte de la localización, temporalidad y condición del fenómeno en estudio se hace un uso intensivo dentro de los SIG; cuando se habla de análisis, donde se incorpora la causalidad del fenómeno, se crea tendencia y se modela, se hace un uso medianamente del SIG, ya que empieza a incluir criterios y experiencia de(l) (los) analizador(es); y cuando se llega a la gestión1 la aplicación del SIG es mínima, ya que aquí solo se muestran resultados y se toman decisiones en los niveles más altos de la gestión.
También dentro del análisis espacial en el SIG se puede hablar de una complejidad analítica, donde el nivel más bajo se realizan operaciones como la consulta y depurado de datos y se ordenan la información, especificando que no se genera nueva información; en un nivel de complejidad media las funciones van orientadas a la sobreposición de las diferentes capas de información que se hayan obtenido del primer nivel, se busca conectividad entre ellas y así llegar a una posible causalidad del fenómeno en estudio, en este nivel se puede llegar a generar nueva información; por último, en una complejidad alta del análisis, se llega a comprender los procesos causales, se generan modelos espaciales y de simulación que pu-eden llegar a dar alternativas y los nuevos datos generados dan paso al conocimiento de condiciones en espacio y tiempo de otros sitios parecidos. Ejemplo sobre la metodología de modelado multivariable y de pronóstico están en el anexo 4.
Producto 4.4 Modelado multivariable y de pronóstico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 31
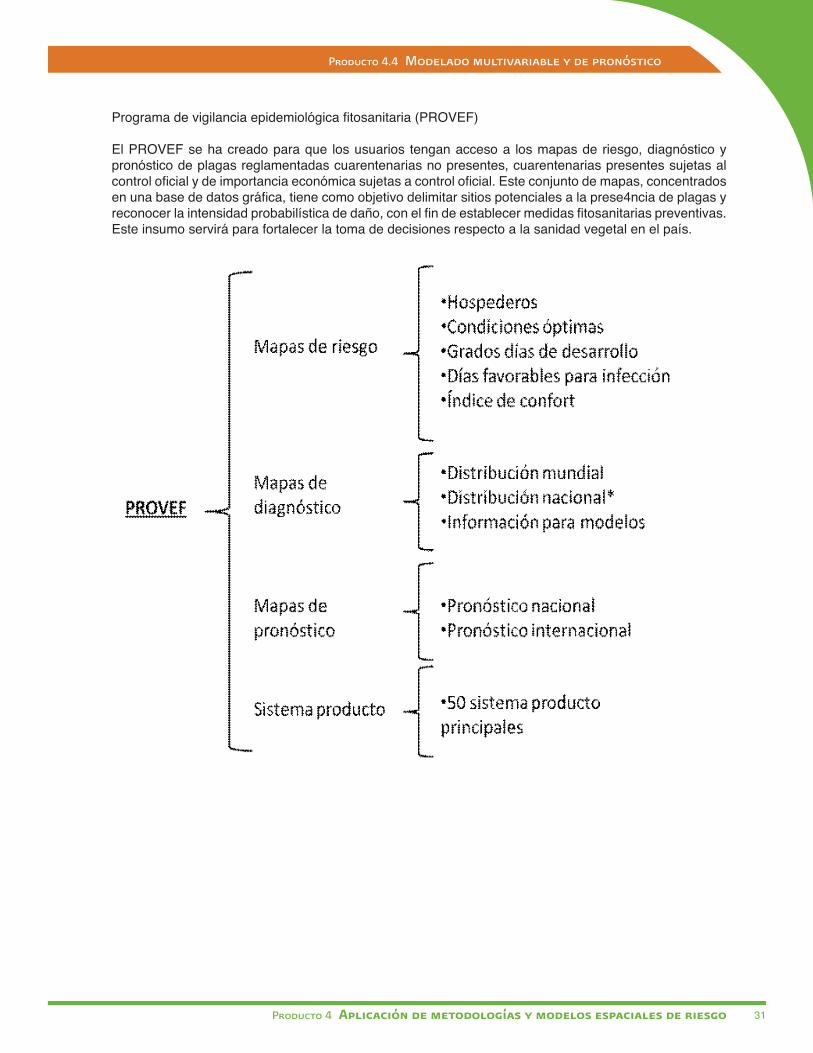
Programa de vigilancia epidemiológica fitosanitaria (PROVEF)
El PROVEF se ha creado para que los usuarios tengan acceso a los mapas de riesgo, diagnóstico y pronóstico de plagas reglamentadas cuarentenarias no presentes, cuarentenarias presentes sujetas al control oficial y de importancia económica sujetas a control oficial. Este conjunto de mapas, concentrados en una base de datos gráfica, tiene como objetivo delimitar sitios potenciales a la prese4ncia de plagas y reconocer la intensidad probabilística de daño, con el fin de establecer medidas fitosanitarias preventivas. Este insumo servirá para fortalecer la toma de decisiones respecto a la sanidad vegetal en el país.
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo32
Referencias Cigliano, M. y Torrusio, S. 2003. Sistemas de Información Geográfica y Teledetección en Entomología: Aplicación en tunaras y langostas (Orthoptera: Acridoinea). Revista Sociedad Entomológica de Argentina. 62 (1-2): 1-14.
Charchar JM, Santo GS, 2001. Effect of temperature on the embryogenic development and hatching of Meloidogyne chitwoodi races 1 and 2 and M. hapla. Nematologia Brasileira, 25(1):71-77; 13 ref.
Cooke, B.M.; Jones, D. Gareth; Kaye, B. 2006. The Epidemiology of Plant Diseases. Springer. (2nd edi-tion).
CONAGUA, 2010. Pronostico de anomalía de lluvia. Comisión Nacional del Agua – Servicio Meteorológi-co Nacional, México. En http://smn.cna.gob.mx/climatologia/pronostico/p-clim02.html
Croft, B. A., M. F. Michels, and R. E. Rice. 1980. Validation of a PETE timing model for the oriental fruit moth in Michigan and central California (Lepidoptera: Olethreutidae). Great Lakes Entomol. Vol. 13:211-217.
Danthanarayana. 1975. The bionomics, distribution and host range of the light brown apple moth, Epi-phyas postvittana (Walk.) (Tortricidae). Australian Journal of Zoology, Vol. 23: 419-437.
DGSV. 2010. Muestreo de la campaña de prevención de introducción de plagas cuarentenarias de los cítricos. Huanglongbing. Dirección General de Protección Fitosanitaria.
Evans K, 1968. The Influence of some factors on the Reproduction of Heterodera rostochiensis. Ph.D. Thesis. London, UK: London University.FAO, 1999. Sistemas de Información Geográfica en el Desarrollo Sostenible. Dirección de Investigación, Extensión y Capacitación de la FAO. Organización de las Naciones Unidas para la Agricultura y la Alimen-tación. En: http://www.fao.org/sd/spdirect/gis/EIgis000.htm
Feil, Helene and Purcell, Alexander. Temperature-dependent growth and survival of Xilella fastidiosa in vitro and in Potted grapevines. Plant Dis. 85:1230-1234.
Floyd, J. M., and C. Krass. 2006. New Pest ResponseGuidelines: Citrus Greening Disease. USDA-APHIS-PPQ- Emergency and Domestic Programs, Riverdale, Maryland.
Hampson, M.C. 1996. A qualitative assesment of wind dispersal of resting spores of Synchytrium endobi-oticum, the causal agente of wart disease of potato. Plant Disease, 80(7):779-782. En EPPO Reporting Service 1996-10-01 Rep. Serv. 1996, N°10.
Lanzoni, A., Bazzocchi, G. G., Burgio, G., and Fiacconi, M. R. 2002. Comparative life history of Liriomyza trifolii and Liriomyza huidobrensis (Diptera: Agromyzidae) on beans: effect of temperature on develop-ment. Environmental Entomology. Vol. 31: 797-803.
Li L., Qin WQ., Ma ZL., Yan W., Huang SC., Peng ZQ. Effect of temperature on the population growth of Rhynchophorus ferrugineus (Coleoptera: Curculionidae) on sugarcane. Environ Entomol. 2010 Jun;39 (3): 999-1003.López, J. 2005. Sistemas de información geográfica en estudios de geomorfología ambiental y recursos naturales: Universidad Nacional Autónoma de México, Facultad de Filosofía y Letras, Serie Seminarios, 187 p.
Producto 4.4 Modelado multivariable y de pronóstico
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 33
Magarey, R. (Editor) 2007a. Workshop on pest risk mapping. Report of Centre for Plant Health Science and Technology – Plant Protection and Quarantine – Animal and Plant Health Inspection Service.
Marchettie. 1976. Phytopathology. Vol. 66 : 4.
Muraleedharan N, Chandrasekharan R, 1981. Observations on the seasonal variations of Acaphylla thep Keifer and Calacarus carinatus (Green) (Acarina: Eriophyidae) in a tea field at the Anamalais (South In-dia). Pestology, 5(6):11-15.
NAPPFAST. 2007. Insect Development Database. The North Carolina State University-APHIS Plant Pest ForecastNCDC. 2010. Monitor de la sequia de América del Norte. National Climatic Data Center, NOAA-Satellite and Information Service. En http://www.ncdc.noaa.gov
Nelson GA, 1984. Survival of Corynebacterium sepedonicum in potato stems and on surfaces held at freezing and above-freezing temperatures. American Potato Journal, 62(1):23-28; [2 tab.].
Phillips, S. y Dudik, 2008. M. Modeling of species distributions with Maxent: new extension and a compre-hensive evaluation. Ecography 31: 161 – 175.
Phillips, S., Anderson, P. y Schapire, R. 2006. Maximum entropy modeling of species geographic distribu-tions. Ecological modeling 190. 231 – 259.
Santos, M. 2000. La naturaleza del espacio. Barcelona: Ariel, 348 p.
Schaad NW, 1982. Detection of seedborne bacterial plant pathogens. Plant Disease, 66(10):885-890.
SCOPE. 2010. Toma de decisiones – Hysplit. Sistema Coordinado de Operaciones para el Manejo de Plagas Reglamentadas y su Epidemiología. SINAVEF- UASLP. En https://scope.zedxinc.com/cgi-bin/login.cgi#
SIAP. 2008. Sistema – producto. Servicio de Información Agroalimentaria Pesquera. SAGARPA. En http://www.siap.gob.mx/ Singh DV, Arora P, Srivastava KD, Nagarajan S, Aggarwal R, 1990. Prediction of the frequency and severi-ty of Karnal bunt occurrence in field, using climatic variables. Indian Journal of Plant Protection, 18(2):225-229.
Talbot, 2004. Etude des principaux parameters biotiques et abiotiques necessaries a l’etablissement d’un modele d’evolution de l’Eudmis de la vigne (Lobesia botrana Schiff.) pour la Region Midi-Pyrenees. Aver-tissements agricoles et lutte integree. Vol.8:1-23.
Téllez, O., Chávez, Y., Gómez, A., Gutiérrez, M. 2004. Modelado bioclimático como herramienta para el manejo forestal: estudio de cuatro especies de Pinus. Revista Ciencia Forestal en México, Vol. 29, Núm. 95. pp. 61 – 82
Younis, A.M., J.A. Ottea. 1993. Some biological aspects, thermal threshold and heat unit requirements for the immature stages of the American bollworm Heliothis armigera. Proceedings Beltwide Cotton Conf., Memphis, Tennessee: Vol. 2: 895-897.


4.5Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM; NOAA-AVHRR (Con algoritmos de stress en la vegetación, temperatura de suelo, etc)


Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 37
El interés principal de la Percepción Remota está dado por su capacidad de proporcionar información temática que cubra los vacíos del conocimiento que se tiene del territorio o que permita actualizar lo que ya se había inventariado anteriormente. Sin embargo, regularmente las imágenes se restringen a un uso visual o para hacer clasificaciones de coberturas, lo que limita su potencialidad. Una imagen es un con-junto sistemático de medidas cuantitativas sobre el territorio, por lo que si estas mediciones se relacionan con parámetros ambientales de interés se podría localizar patrones de localización espacio-temporales más sistemáticas con intervalos regulares y condiciones comparables (escala, hora de la toma, sensor)
En Percepción Remota es habitual disponer de imágenes obtenidas por diversos sensores que presentan diferentes resoluciones espaciales y espectrales, que permiten obtener información de diversas condi-ciones ambientales en las que se desarrollan las plagas. Potencialmente las variables que se pueden obtener o deducir con imágenes de satélite son numerosas y están relacionadas con las propiedades ópticas de los objetos. La información espectral, determinada por la cantidad de energía que los diversos elementos reflejan y son capturados por el satélite, en las distintas frecuencias del espectro electromag-nético se denomina firmas espectrales y pueden ser usadas para identificar situaciones ambientales en las que las plagas pueden desarrollarse o dispersarse como la salud de la vegetación la temperatura y la humedad de suelo) (Figura 1).
Figura 1 Comportamiento espectral de diversas coberturas de suelo

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo38
Actualmente existen una gran cantidad de satélites en operación que proporcionan información a diver-sas resoluciones espaciales, espectrales y temporales que pueden ser utilizados para estudios epide-miológicos fitosanitarios. Específicamente, los datos espectrales facilitan la adquisición de información sobre tipos de energía que no son accesibles al ojo humano, como el infrarrojo o el térmico, que propor-cionan valiosa información de aspectos ambientales como el vigor vegetal, la humedad o la temperatura del suelo, así como para la discriminación de diversas cuberturas de suelo.
En percepción remota existen un conjunto de parámetros numéricos que permiten evaluar diversas cobe-rturas, entre ellas es el estado de la vegetación y las condiciones de temperatura y humedad del suelo. Estas cantidades están íntimamente relacionadas con la manipulación de los valores de reflectancia (la capacidad que tienen los objetos de reflejar radiación electromagnética) que los pixeles tienen sobre dos o más bandas de una misma imagen satelital, lo que permite la conformación de índices y observar los planos de variación de las coberturas.
Con los datos espectrales se pretenden establecer relaciones de índole general y demostrar la relación física entre el parámetro a estimar (área foliar, humedad, temperatura, vigor vegetal, etc) y la información espectral contenida en la imagen. Una vez comprobada la relación se invierte el modelo para que a través de de las imágenes se pueda estimar esa variable. Esto implica ajustes a la imagen, que involucra mod-elar condiciones atmosféricas, la geometría de la observación, el aporte del sustrato y las condiciones de mezcla de las distintas cubiertas.
Los sensores aportan información en diferentes escalas espectrales, temporales y espaciales, por lo que son útiles tanto para hacer seguimientos y monitoreos, así como para la realización de estudios multi-temporales y la construcción de índices espectrales. Las imágenes aportan información a través de las bandas de manera directa como la temperatura o los compuestos RGB, pero también, al ser una matriz numérica, es factible la realización de índices a través de operaciones matemáticas.
Un índice se crea a partir de un número generado por la combinación de bandas espectrales que tienen relación con el valor presente en un determinado píxel de la imagen. Esta relación matemática de bandas permite generar nuevas bandas con nueva información y realzar elementos que no podían discriminarse con las bandas originales.
Entre los índices más importantes figuran los que conducen a evaluar el estado de salud de la veg-etación, dentro de los cuales el más conocido y usado es el Índice Normalizado Diferencial de Vegetación (NDVI – Normalized Difference Vegetation Index). Este índice, permite obtener el vigor de la vegetación, al conjuntar la información de las bandas roja e infrarroja y formar el denominado Índice Diferencial de Vegetación Normalizado (NDVI – Normalized Difference Vegetation Index) definido como (Tarpley et al., 1984):
NDVI=IRC-R IRC+R
Donde IRC es la reflectancia espectral en la banda infrarrojo cercano y R representa la reflectancia en la banda roja del visible. EL NDVI se basa en el hecho de que la vegetación fotosintéticamente activa absorbe energía en el espectro del rojo y emite en el infrarrojo cercano. La formula produce una medida cuantitativa que está relacionada con las condiciones de la vegetación y su biomasa.
Los valores del NDVI están en función de la energía absorbida o reflejada por las plantas en diversas partes del espectro electromagnético. La respuesta espectral que tiene la vegetación sana, muestra un claro contraste entre el espectro del visible, especialmente la banda roja, y el Infrarojo Cercano (IRC). Mientras que en el visible los pigmentos de la hoja absorben la mayor parte de la energía que reciben, en el IRC, las paredes de las células de las hojas, que se encuentran llenas de agua, reflejan la mayor cantidad de energía.
Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 39
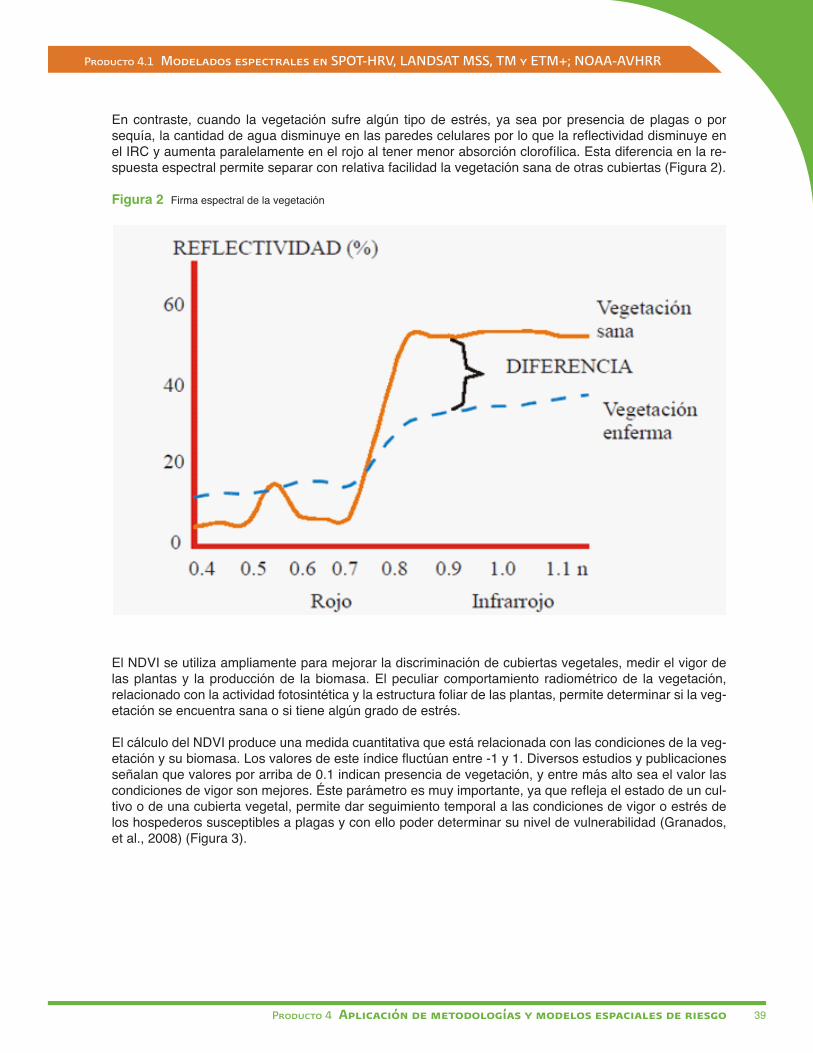
En contraste, cuando la vegetación sufre algún tipo de estrés, ya sea por presencia de plagas o por sequía, la cantidad de agua disminuye en las paredes celulares por lo que la reflectividad disminuye en el IRC y aumenta paralelamente en el rojo al tener menor absorción clorofílica. Esta diferencia en la re-spuesta espectral permite separar con relativa facilidad la vegetación sana de otras cubiertas (Figura 2).
Figura 2 Firma espectral de la vegetación
El NDVI se utiliza ampliamente para mejorar la discriminación de cubiertas vegetales, medir el vigor de las plantas y la producción de la biomasa. El peculiar comportamiento radiométrico de la vegetación, relacionado con la actividad fotosintética y la estructura foliar de las plantas, permite determinar si la veg-etación se encuentra sana o si tiene algún grado de estrés.
El cálculo del NDVI produce una medida cuantitativa que está relacionada con las condiciones de la veg-etación y su biomasa. Los valores de este índice fluctúan entre -1 y 1. Diversos estudios y publicaciones señalan que valores por arriba de 0.1 indican presencia de vegetación, y entre más alto sea el valor las condiciones de vigor son mejores. Éste parámetro es muy importante, ya que refleja el estado de un cul-tivo o de una cubierta vegetal, permite dar seguimiento temporal a las condiciones de vigor o estrés de los hospederos susceptibles a plagas y con ello poder determinar su nivel de vulnerabilidad (Granados, et al., 2008) (Figura 3).

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo40
Figura 3 Seguimiento temporal del comportamiento del NDVI y ENSO en zonas citrícolas de Veracruz
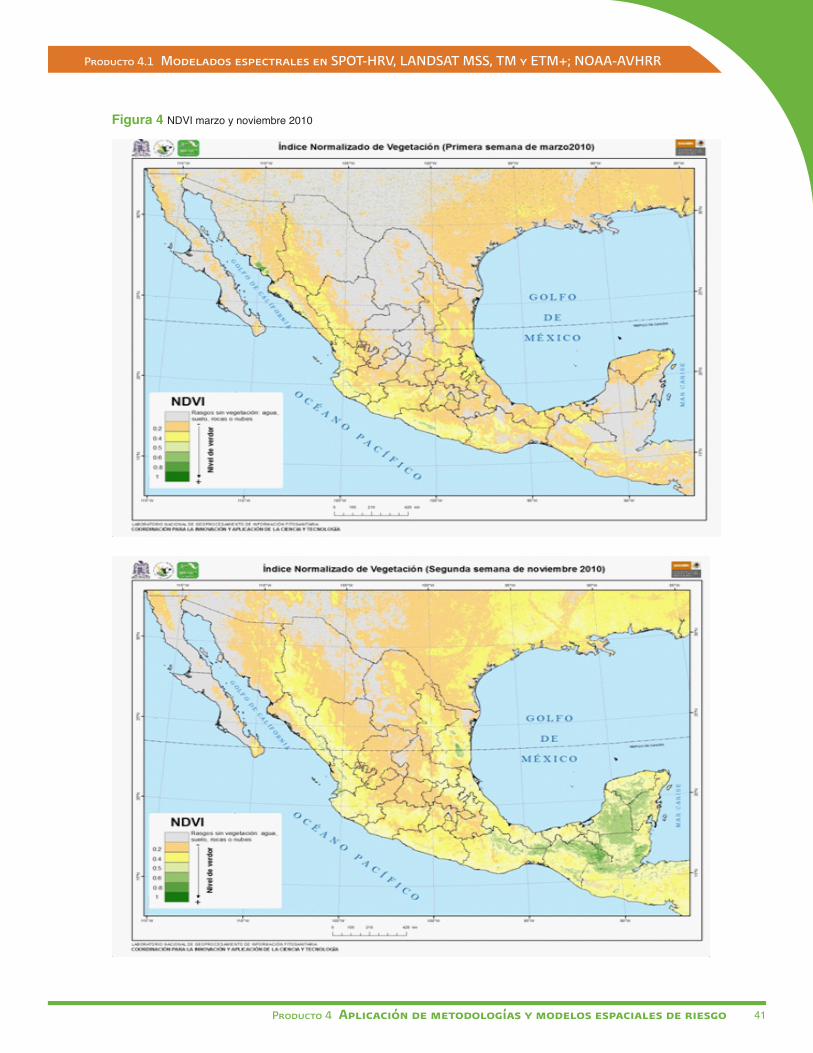
Las imágenes de NDVI provienen del satélite NOAA para tener un cubrimiento de toda la República Mexi-cana y para su conformación se utilizan las Bandas 1y 2 del sensor AVHRR (Tabla 1). Estas imágenes son proporcionadas por el Instituto de Geografía de la UNAM con una cobertura temporal alta, ya que se recibe una imagen diaria, sin embargo, para reducir los efectos de las nubes se realizan compuestos de cada 10 días por lo que al mes se llegan a tener hasta tres compuestos que son los que se utilizan para el análisis (Figura 4).
Tabla 1 Bandas espectrales del sensor AVHRR-NOAA
Banda Rango espectral (micrómetros) Aplicaciones
1 0.58 – 0.68 Seguimiento de nubes, nieve ycapa de hielo
2 0.72 – 1.1 Discriminación de superficies de agua y vegetación. Aplicaciones agrícolas
3 3.55 – 3.93 Temperatura superficial del mar, volcanes e incendios forestales
4 10.3 – 11.3 Temperatura del mar, humedad del suelo
5 11.5 – 12.5 Temperatura del mar, humedad del suelo
Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 41
Figura 4 NDVI marzo y noviembre 2010

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo42
La temperatura del suelo es otro indicador para el monitoreo de plagas. La temperatura es una me-dida del calor o energía térmica de las partículas. La temperatura de suelo se constituye en uno de los parámetros más relevantes en la estimación de diversas variables de interés ambiental, tales como la evapotranspiración, inercia térmica, entre otras. En la práctica obtener la estimación de la temperatura del suelo requeriría un alto costo económico para cubrir amplias extensiones de terreno. La solución a estos inconvenientes surge en la década de los años cincuenta con el desarrollo de la tecnología infrarroja y con su posterior utilización a bordo de satélites artificiales; desde el primero de ellos, el Television Infrared Operation Satellite (TIROS), hasta los actuales satélites de la National Oceanic and Atmospheric Admin-istration (NOAA) y Land Satellite (LANDSAT), que permiten el acceso de información de la superficie de la tierra a escala sinóptica (Parra et al, 2006).
El monitoreo de la temperatura del suelo es importante porque se ha comprobado el efecto que tiene ésta en el desarrollo de algunas plagas, por ello su seguimiento es de importancia para localizar posibles zonas de riesgo) (Gregg, 1985). No obstante, uno de los mayores problemas que plantea la medida de la temperatura de suelo desde satélites es la acción combinada de las perturbaciones debidas al efecto atmosférico y la variabilidad en las emisividades de las diferentes coberturas de suelo. En particular, en la ventana del infrarrojo termal (8-13 ¹m), la perturbación atmosférica es debida casi por entero al contenido de vapor de agua en la atmósfera. Por lo tanto, una adecuada estimación de la temperatura de suelo desde datos aportados por satélites, requiere corregir los efectos antes mencionados (Tabla 1).
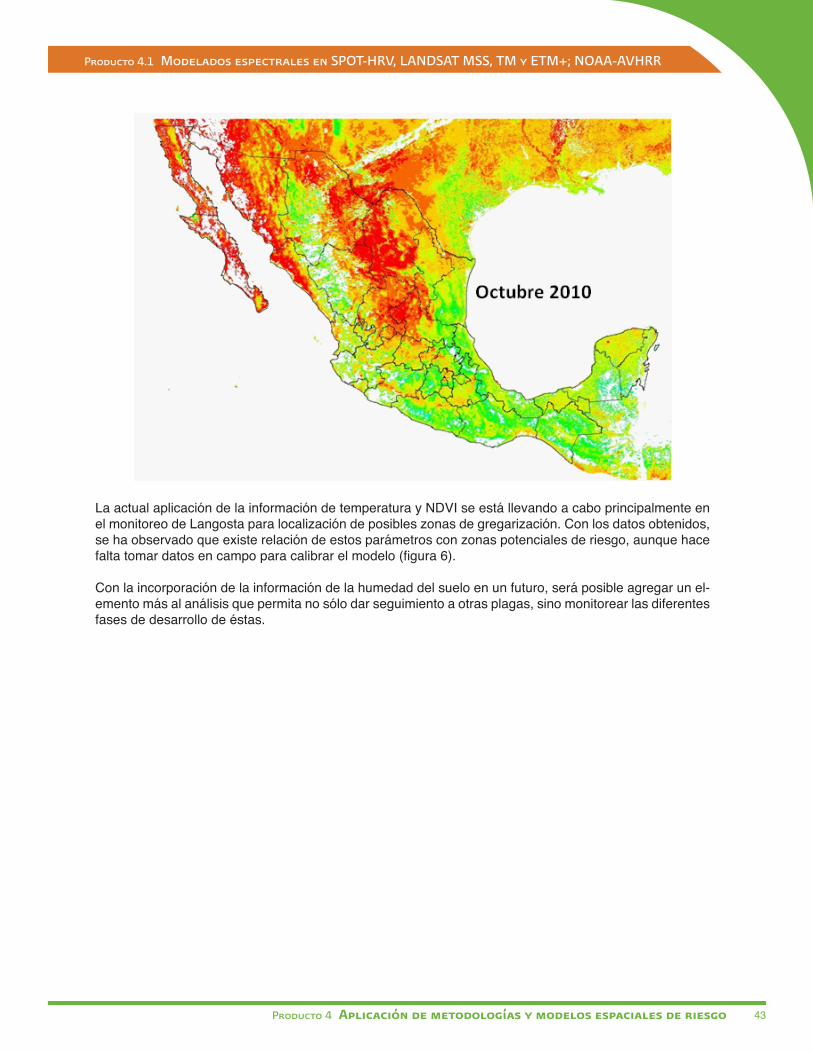
Las imágenes de temperatura son obtenidas de las imágenes NOAA a través de los ATOVS ((Advanced TIROS (Television and Infrared Observational Satellite) Operational Vertical Sounder), son proporcio-nadas por el Instituto de Geografía de la UNAM y su recepción se realiza dos veces por día, una por la mañana y otra por la tarde. La desventaja de estos productos es que la validación no ha sido comprobada suficientemente, por lo que, como se mencionaba anteriormente, se requiere realizar mediciones en campo para su correcta aplicación (Figura 5).
Figura 5 Temperatura de suelo imágenes AVHRR
Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 43
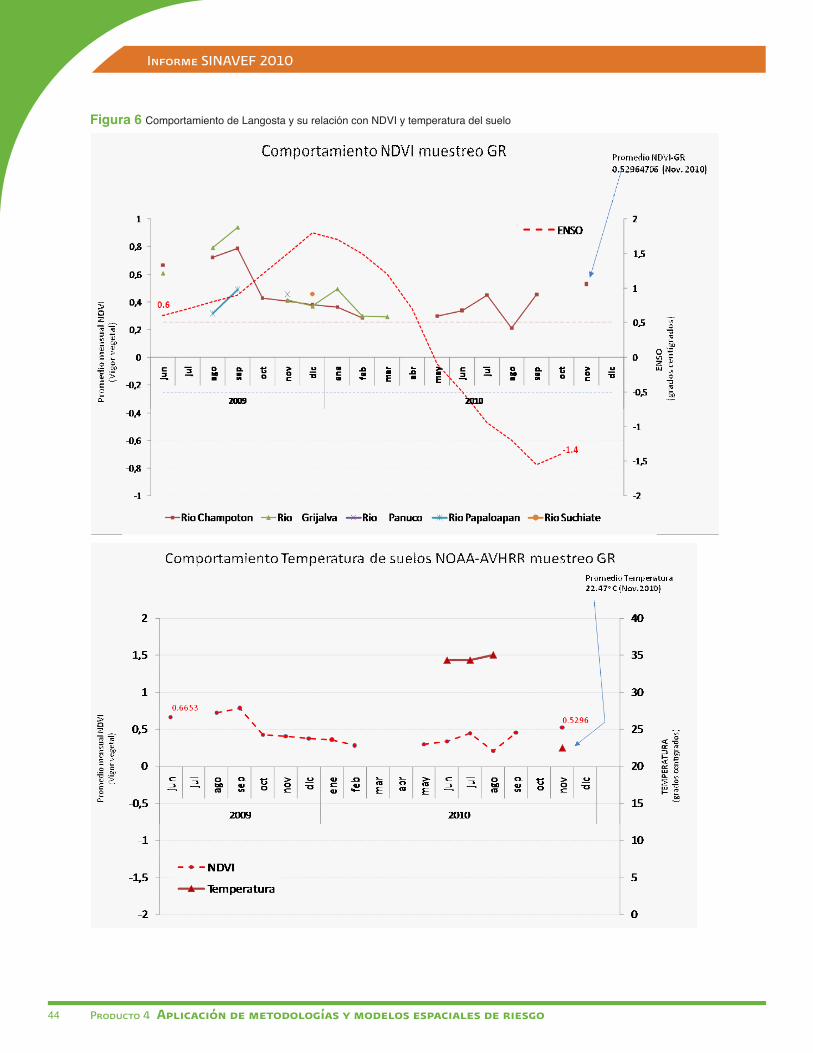
La actual aplicación de la información de temperatura y NDVI se está llevando a cabo principalmente en el monitoreo de Langosta para localización de posibles zonas de gregarización. Con los datos obtenidos, se ha observado que existe relación de estos parámetros con zonas potenciales de riesgo, aunque hace falta tomar datos en campo para calibrar el modelo (figura 6).
Con la incorporación de la información de la humedad del suelo en un futuro, será posible agregar un el-emento más al análisis que permita no sólo dar seguimiento a otras plagas, sino monitorear las diferentes fases de desarrollo de éstas.
Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo44
Figura 6 Comportamiento de Langosta y su relación con NDVI y temperatura del suelo
Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 45
La cubierta vegetal es otro de los factores que influyen en la distribución geográfica de las plagas, al ser los elementos que funcionan como hospederos y a través de los cuales se desarrollan los organismos, conocer su localización y su extensión permite determinar las posibles vías de entrada y dispersión de plagas para estimar los posibles daños asociados con éstas. La utilidad de las imágenes de satélite en inventarios de usos de suelo está ampliamente reconocida por su capacidad de discriminar diversas cu-biertas vegetales de acuerdo con el nivel de detalle de las imágenes que se utilicen. A partir de la clasifi-cación de los valores digitales de la imagen es posible obtener una cartografía o inventario de categorías objeto de estudio. Además, la capacidad de obtener imágenes de diferentes fechas sobre el mismo sitio, permite dar seguimiento a los cambios ocurridos en el tiempo, lo que posibilita analizar las condiciones pasadas y presentes en las que se desarrollan las plagas y poder construir escenarios de riesgo
La clasificación de una imagen digital consiste en categorizar una imagen multibanda. Se pasa de tener unos ND continuos medidos por los sensores a una escala nominal o categórica de manera que cada píxel pertenece a una categoríadefinida previamente. El ND de un píxel clasificado es el identificador de la clase o categoría en la que se haya incluido. Estas clases pueden describir distintos tipos de cubiertas (variable nominal o categórica) o bien intervalos de una misma categoría de interés (variable ordinal).
La clasificación digital se basa exclusivamente en los ND de la imagen que son una traducción digital de un flujo energético recibido por un sensor para una determinada banda del espectro y a los cuales se les designa una categoría. La metodología empleada tiene que ver con la complejidad de la imagen anali-zada y pueden utilizarse los métodos visuales, no supervisados y supervisados, aunque también puede utilizarse de forma mixta.
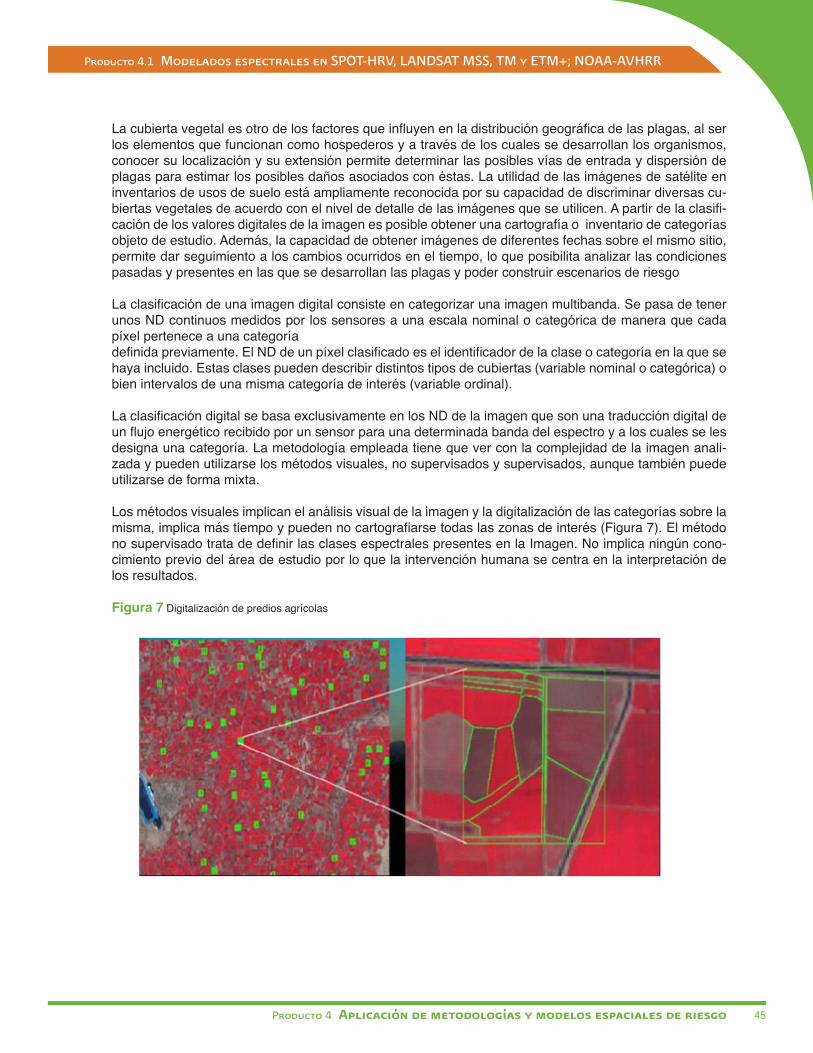
Los métodos visuales implican el análisis visual de la imagen y la digitalización de las categorías sobre la misma, implica más tiempo y pueden no cartografiarse todas las zonas de interés (Figura 7). El método no supervisado trata de definir las clases espectrales presentes en la Imagen. No implica ningún cono-cimiento previo del área de estudio por lo que la intervención humana se centra en la interpretación de los resultados.
Figura 7 Digitalización de predios agrícolas

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo46
Este método asume que los ND de la imagen se agrupan en una serie de conglomerados (o clusters) que se corresponden con grupos de píxeles con un comportamiento espectral homogéneo. El método se basa en la selección de tres parámetros: variables que intervienen en el análisis, criterio para medir la distancia o similitud entre casos, y un criterio para agrupar los casos similares. En Percepción remota las variables son las diferentes bandas espectrales. Los casos son los píxeles que componen la imagen y cada uno de ellos está definido por tantos ND como bandas tengamos. Lo que trata este método es encontrar grupos de píxeles con ND parecidos para asignarlos a alguna de las categorías temáticas que deseemos.
El método supervisado, por su parte, requiere de cierto conocimiento del territorio para asignar clases. Se basa en asignar campos de entrenamiento en la imagen para enseñar al sistema a reconocer y discrimi-nar las diversas categorías. Cuando se tienen las áreas de entrenamiento deseada el ordenador calcula estadísticas a partir de valores digitales en las áreas de entrenamiento asignadas para definir cada una de las clases en la imagen.
Cuando se utiliza un método no supervisado el algoritmo para clasificar la imagen puede ser uno que marque la similitud entre píxeles, u otro que marque las condiciones del proceso de agrupamiento. Para el primero, el método más utilizado se basa en la distancia euclidea aunque se pueden utilizar otros crite-rios como el de la distancia media o la de Mahalanobis. En cuanto al algoritmo de agrupamiento, el más extendido es el denominado ISODATA.
Para la clasificación supervisada se utilizan sobre todo clasificadores de mínima distancia y el de máxima probabilidad. Los clasificadores de mínima distancia se basan en la medida de la distancia euclidiana, el método busca incluir a todos los pixeles no seleccionados en los campo de entrenamiento para asignarlo a alguna categoría establecida que se encuentre más cercana a él, es decir en aquella que minimice la distancia entre el centroide de cada clase. Esta distancia no es una distancia geográfica sino espectral consecuencia de comparar los ND de cada píxel con los del centro de las distintas categorías, para todas las bandas que intervienen en el análisis.
Una vez determinadas las distancias a cada clase, se toma la mínima de todasellas, y se asigna el píxel correspondiente a la clase más próxima (es decir, a la clase para la cual la distancia es menor).
Este algoritmo es relativamente rápido de ejecutar y ofrece buenos resultados cuando no exista un gran solape entre clases. Además, no deja ningún píxel sin clasificar puesto que siempre existe una clase más cercana.
La clasificación de máxima probabilidad considera que los ND de cada categoría se ajustan a una dis-tribución normal. Esto nos permite describir esa categoría por una función de probabilidad, a partir de su vector de medias y matriz de varianza-covarianza. Así podemos calcular la probabilidad de que un determinado píxel pertenezca a una categoría; el cálculo se realiza para todas las categorías definidas y el píxel se clasifica en clase a la cual tenga más probabilidad de pertenecer.

Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 47
Para calcular la probabilidad asociada a un cierto ND se necesita la media y ladesviación típica de cada categoría. En el caso de trabajar con una sola banda laprobabilidad se calcula de la siguiente forma:
Pp(x/A) =probabilidad de que un cierto píxel x (definido por ND x) pertenezca a la clase A,A ND = media de la clase A σ_A^2= varianza de la clase A
Una vez determinada la probabilidad para todas las categorías el píxel será asignado a la clase A, sólo si:
Para el caso de dos bandas, los límites de las categorías tienen una forma elipsoi-dal. Cada una de estas elipses es una línea de isoprobabilidad, es decir todos sus pun-tos tienen la misma probabilidad de pertenecer a la categoría asociada (Figura 8).
Figura 8 Extensión de dos bandas con el algoritmo de máxima probabilidad

Informe SINAVEF 2010
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo48
Con más de dos bandas resulta imposible representar gráficamente este criterio de clasificación y se debe extender la fórmula de la probabilidad. Una vez que el software asigna los píxeles puede establecerse algún criterio que permita asignarlos a una clase sólo si la probabilidad correspondiente es superior a determinado umbral. Este clasificador es el más complejo y, por lo tanto, el que mayor volumen de cálculo requiere, pero es el más robusto y fiable ya que se ajusta fielmente a la distribución original de los datos.
Los métodos de clasificación se realizan sobre imágenes SPOT con resolución a 10 metros en el multi-esprectral y 2.5 en el pancromático, por lo que factible discriminar coberturas agrícolas y vegetales de lo que no lo es (Figura 9) Estas imágenes se obtienen a través de la Secretaria de Marina, vía SENASICA. Las imágenes son procesadas en ERMEX para asegurar que exista el menor cubrimiento de nubes, por lo que cada mosaico a nivel nacional puede tardar en formarse al menos un año. El mosaico nacional con el que se está trabajando actualmente proviene de imágenes de 2008 y 2009 y se está utilizando para actualizar la cobertura de uso de suelo agrícola del país
Figura 9 Clasificación de imágenes de satélite para la obtención de coberturas de suelo
Producto 4.1 Modelados espectrales en SPOT-HRV, LANDSAT MSS, TM y ETM+; NOAA-AVHRR
Producto 4 Aplicación de metodologías y modelos espaciales de riesgo 49
Bibliografía.
Chuvieco, E. 2002. Teledetección ambiental. La observación de la tierra desde el espacio. Ariel.
Goetz, S., Prince, S. y Small, J. 2000. Advances in Satellite Remote Sensing of Environmental Variables for Epidemiological Applications. Advances in Parasitology 47: 289-319 Granados R.; Galindo, M.G.; Contreras, C.; Hérnandez, M.E.; Valdez, G. 2008. Monitoring land cover and land use use NOAA-AVHRR data in the Huasteca Potosina, México. Geocarto International 23(4): 273-285.
Gregg, P. 1985 Reversal of embryonic diapause in the Australian plague locust, Chortoicetes terminifera (Walker), by temperatures above the development threshold. Journal of Insect Physiology 31 (12): 959-962
Jarvis, A.; Zapata, E. 2008. Cambio climático, las plagas y enfermedades en Colombia. CIAT. Colombia. [en linea] disponible en <http://www.slideshare.net/CIAT/andy-jarvis-cambio-climtico-y-plagas-en-colom-bia> [consultado el 16 de octubre de 2010]
Jensen, J. 2007. Remote Sensing of the environment. An Earth resource perspective. Pearson Prentice Hall. Unites Estates.
Lillesand, T., Kiefer, R., Chipman, J. 2007. Remote Sensing and image interpretation. Wiley & Sons. United States.
Parra, J.C., Sobrino J.A., Acevedo P.S. y Morales L.J. 2006. Estimación de la temperatura de suelo desde datos satelitales AVHRR-NOAA aplicando algoritmos de split window. Revista Mexicana de Física 52 (3): 238-245, Junio.
Ray, T.W. 1994. A FAQ on Vegetation in Remote Sensing. Division of Geological and Planetary Science. California Institute of Technology [Online] disponible en [http://www.yale.edu/ceo/Documentation/rsveg-faq.html]. [Consultado 8 de marzo de 2010]
Tarpley, J., Schneider, S y Money, R. 1984. Global vegetation indices from NOAA-7 meteorological satel-lite. J. Clim. Appl. Meteorol. 23: 491-494.


! 4.6