anÁlisis estructural no-lineal del bordo de la presa de
TRANSCRIPT
REPORTE PARCIAL
ANÁLISIS ESTRUCTURAL NO-LINEAL
DEL BORDO DE LA PRESA DE JALES DE
LA PLANTA PELETIZADORA, ALZADA-
COLIMA
PROYECTO:
ELABORACION Y DESARROLLO DEL PROYECTO EJECUTIVO DE LA
INGENIERÍA DE DETALLE PARA LA CONSTRUCCIÓN DEL NUEVO VASO DE
ALMACENAMIENTO FORMADA POR TRES BORDOS NUEVOS Y
CRECIMIENTOS DE LOS EXISTENTES, EN LA PRESA DE JALES DE LA
PLANTA PELETIZADORA DE ALZADA, EN EL MUNICIPIO DE CUAUHTEMOC,
COL.
RESPONSABLE
DR. GUILLERMO M. ROEDER CARBO
17 de abril, 2008
2
ACCIÓN SÍSMICA EN EL MODELO NUMÉRICO
INTRODUCCIÓN
El peso propio de la construcción con el material del bordo saturado y la acción sísmica son
problemas de mucha importancia en el estudio de la estabilidad estructural de la presa de
jales de Alzada-Colima.
Con relación a la acción sísmica, debido a la poca cantidad de registros de aceleraciones en
Colima, definir la respuesta por este efecto en la presa en una fase crítica de este trabajo.
Por ello , en esta parte del informe, se procurará de manera aproximada, en base a modelos
matemáticos, definir esta acción haciendo un estudio con las herramientas numéricas
disponibles.
El movimiento sísmico es complicado y éste se considera un proceso estocástico de alta
complejidad. Así, basado en estas teorías, se puede generara registros sísmicos sintéticos
siguiendo lineamiento adecuados de análisis para poder exigir a la estructura la máxima
resistencia posible; por este motivo, este estudio hace una revisión de los resultados
producto de estas generaciones.
Se debe aclarar que los registros que se presentan en este trabajo son exclusivos para el
estado de Colima, por el ámbito donde se encuentra la presa de jales.
OBTENCIÓN DE REGISTROS SINTÉTICOS
A continuación se describe el procedimiento de cálculo de registros sintéticos compatibles
con el espectro de respuesta de velocidad de uno de los registros elegidos. Para el cálculo
de estos registros se ha utilizado el programa SIMQKE (Gasparini y Vanmarcke, 1976).

3
Registros en el estado de Colima
El estado de Colima es uno de los de mayor actividad sísmica del país. Pero, a pesar de
esto, los registros aún no han sido suficientes para poder establecer una base de datos que
permita especificar un espectro de diseño adecuado. Para resolver este problema, se empleó
las técnicas numéricas antes mencionadas para definir veinte registros que puedan ser
empleados en el análisis de la estructura con elementos finitos.
Para establecer la duración probable de los registros se usó valores del 5% y 95% de
intensidad de Arias de los registros para estimar la duración de la parte intensa del
movimiento. La intensidad de Arias, Ia, se calcula con la siguiente expresión:
( )( )2
02
tT
aI x t dtg
π=⋅ ∫ (1)
Donde g es la aceleración de la gravedad, x(t) son los valores de aceleración en el tiempo t.
Así se tiene la siguiente tabla con tres de los registros que se eligieron de la base de datos
de sismos para el Estado de Colima. Uno de los registros generados se presenta a
continuación en la Fig. 1.
Se observa que en el registro de aceleraciones, el cual está en m/seg2, muestra algunos
picos en ciertas frecuencias; pero, los valores de aceleración en estas frecuencias se
reemplazaron por la aceleración promedio para que el proceso de simulación con estos
registros no arroje resultados inconvenientes, el proceso de generación con los datos
planteados a partir del registro de velocidades del 09/octubre de 1995, fueron los más
adecuados, en los anexos se presentan los resultados usando este registro.

4
Aceleraciones sintéticas
-7
-5
-3
-1
1
3
5
7
0 10 20 30 40 50 60 70
Tiempo (seg)
Ace
lera
ció
n (
m/s
eg2 )
N00E:0.6G
Figura 1 Registro sintético generado con aceleración máxima de 0.6g
MODELO GENERAL DEL BORDO CON ELEMENTOS
FINITOS
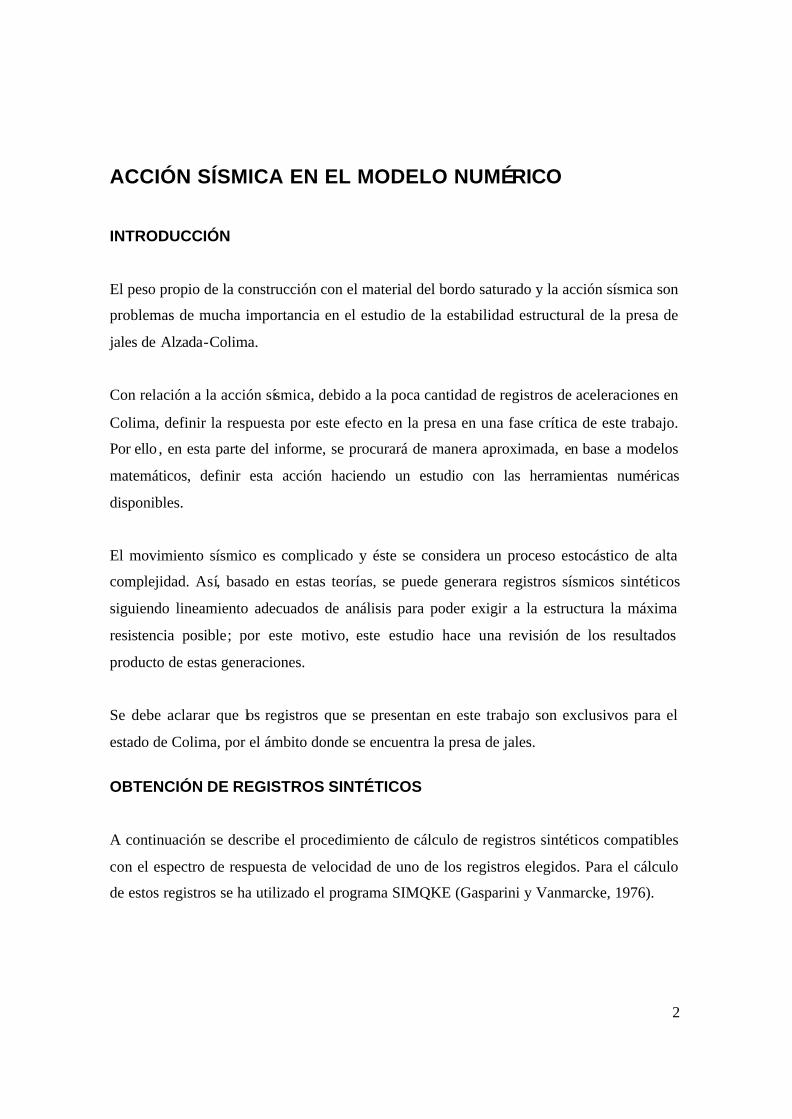
La geometría del modelo de análisis se ha uniformizado por las dimensiones que se
presentan para cada uno de los bordos 6 7 y 8. Para fines prácticos se considera que las
variaciones geométricas por el recubrimiento en los taludes son despreciables y que se
puede suponer que éstos son líneas rectas. Se ha considerado que sólo se presentan
componentes horizontales en la base de la presa.
El análisis propuesto en este trabajo consta de cuatro fases. En la Fig. 2 se muestran los
modelos geométricos de elementos finitos de estas etapas.
El modelo de comportamiento de material es de plasticidad de Mohr-Coulomb (Roeder,
2004) para el caso de la presa. Las propiedades inelásticas se obtuvieron de los ensayos
triaxiales que se muestran en los documentos del proyecto. Las grandes deformaciones
plásticas que se observen en los resultados indicarán el colapso del material. Los grados de
libertad en el caso de modelos planos de deformación, utilizados comúnmente en estos
análisis, son dos que son paralelos a los ejes globales X y Y. Las condiciones de frontera de

5
desplazamientos son iguales a cero en la base del bordo respecto a estos grados de libertad
considerados.
Para simular la acción hidrodinámica del líquido se suponen masas concentradas se
calculan con las fórmulas de Westergaard. Estas masas se incluyen en los nudos del talud
aguas arriba de la presa.
Para el análisis completo de fases de la presa se consideran las siguientes etapas:
• Análisis no lineal estático del peso propio de la construcción, esto se realizó con
diez incrementos 0.1 g en aceleración, hasta completar la magnitud de la gravedad
(g).
• Análisis no lineal estático de carga hidrostática, se lleva a cabo incrementando la
intensidad de la carga con diez pasos de 0.1 la magnitud máxima en cada punto de
presión que se encuentra aguas arriba de la presa.
• Análisis dinámico no-lineal, en este caso se realizó un análisis con un registro
sintético obtenido de la planta térmica que se encuentra en Manza nillo. El sismo
sem illa que se empleó es el que ocurrió el 9 de octubre de 1995, cuya magnitud fue
de 7.5 en la escala de Richter y con aceleraciones máximas de 0.4g
aproximadamente. La aceleración máxima objetivo a la que se somete la
construcción es de 0.6g. Además, se incluyen los efectos hidrodinámicos debido al
empuje del agua y sedimentos en la presa originado por el movimiento del terreno.
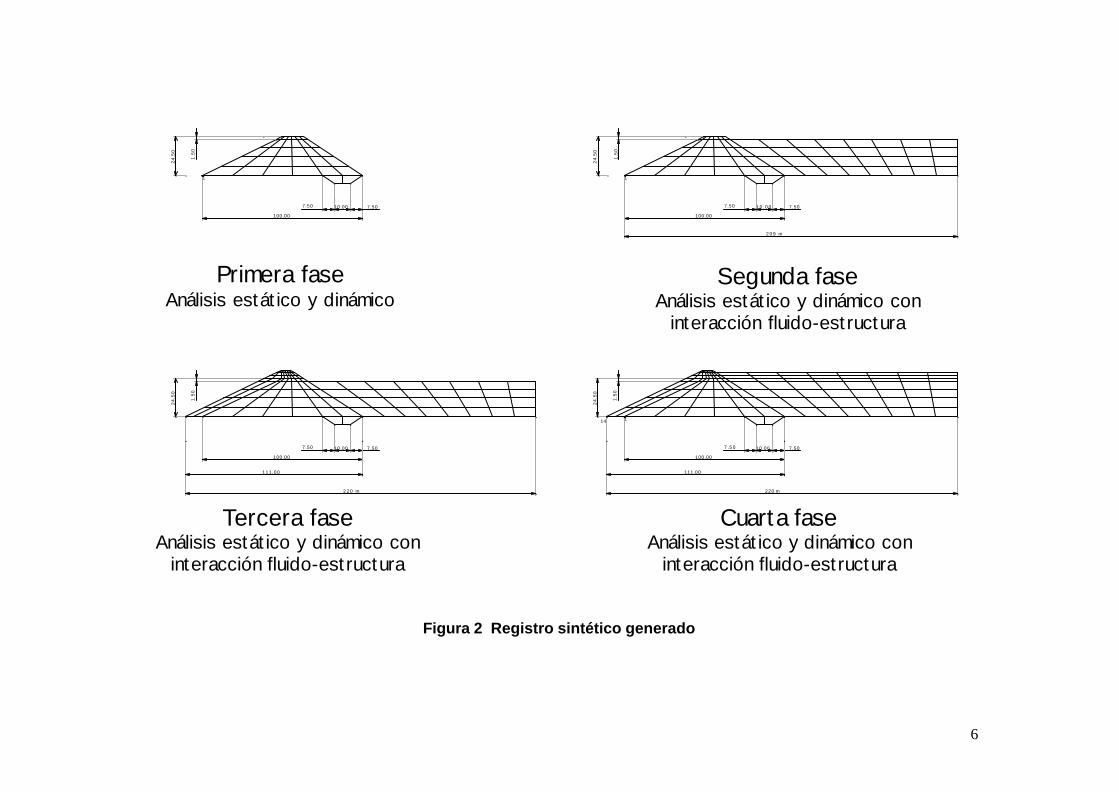
Los parámetros de los materiales que se emplean en los análisis se han obtenido del estudio
de mecánica de sue los solicitados por la empresa minera. En las siguientes tablas se
resumen estas características del material usando un peso volumétrico del líquido en la
presa de 1.8 T/m3.
6
100.00
7.50 10.00 7.50
24.5
0
1.5
0
1
Primera faseAnálisis estático y dinámico
100.00
7.50 10.00 7.50
24.5
0
1.5
0
1
Segunda faseAnálisis estático y dinámico con
interacción fluido-estructura
209 m
100.00
7.50 10.00 7.50
24.5
0
1.5
0
Tercera faseAnálisis estático y dinámico con
interacción fluido-estructura
220 m
111.00
100.00
7.50 10.00 7.50
24.5
0
1.5
0
1
Cuarta faseAnálisis estático y dinámico con
interacción fluido-estructura
14
220 m
111.00
Figura 2 Registro sintético generado
7
Material de bordo, casos dinámicos
E
(MPa)
ν φ f Resistencia de corte
(Ton/m2)
3.3E+3 0.25 0.00 15.0
Tabla 1 Propiedades de los materiales
Material de bordo, casos estáticos
E
(Ton/m2)
ν φ f Densidad
(Ton-seg2/m4)
Cohesión
(Ton/m2)
3.3E+3 0.25 30.00 1.9E-3 5.0
Tabla 2 Propiedades de los materiales
Usando el programa SIMQKE (Gasparini y Vanmarcke, 1976) se calcularon las
aceleraciones del terreno utilizando al espectro de velocidades obtenido de registros de
aceleraciones de la Termoeléctrica de Manzanillo capturado el 9 de octubre de 1995. A
pesar que se puede utilizar el espectro de aceleraciones que se presenta en el Manual de
Diseño Sísmico de Obras Civiles de la Comisión Federal de Electricidad (CFE, 1995) para
generar artificialmente acelerogramas; se decide en este trabajo, calcular los registros
sintéticos con el espectro de velocidades obtenido del registro de la Termoeléctrica de
Manzanillo usando un amortiguamiento de 5%, pues se observa que los valores de seudo-
aceleración del espectro de diseño de la CFE son mucho menores que los que presenta el
sismo de Manzanillo , como se aprecia en la Fig. 3.

8
Espectro de aceleraciones para Colima
0.00.20.40.60.81.01.21.41.61.8
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Periodo (seg)
A/g Manzanilo, 95
Espectro CFE
Figura 3 Espectros de Manzanillo con 5% de amortiguamiento y el de diseño
de la CFE
Espectro de velocidades N00E
0.00
50.00
100.00
150.00
200.00
250.00
0.00 0.50 1.00 1.50 2.00 2.50 3.00
Periodo (seg)
Sv
(cm
/seg
)
ξ=1%
ξ=2%
ξ=3%ξ=4%
ξ=5%
ξ=6%
ξ=7%
ξ=8%
ξ=9%
ξ=10%
Figura 4 Espectros de velocidades del sismo de Manzanillo 09/10/95
A pesar de la condición aleatoria de la respuesta sísmica ante eventos futuros exige un
estudio probabilístico, la posibilidad de realizar una investigación de estas características
resulta oneroso en tiempo. Además, la limitante de no contar con registros confiables en
Colima también imposibilita la etapa de verificación de estos acelerogramas sintéticos con
los correspondientes a los de un sismo de alta intensidad que se hayan producido a lo largo
del tiempo en el estado.
9
Para describir el posible comportamiento de la presa se escogió las componentes N00E y
N90E de los registros capturado por los equipos de medición de la Central Térmoeléctrica
de Manzanillo, para generar los correspondientes sintéticos. De la población generada se
seleccionó el más idóneo con una aceleración máxima de 0.6g (5.886 m/seg2); algunos de
los demás registros se encuentran en el disco compacto que se está entregando a la empresa
cliente.
Antes de la generación, se procedió a corregir la línea de base para que la velocidad
obtenida por integración dentro del lapso de tiempo que ocurrió todo el evento.
DISCUSIÓN DE LOS RESULTADOS
A continuación se presentan de manera gráfica algunos de los resultados obtenidos del
análisis por elementos finitos de la estructura en estudio. Los resultados que se presentan
corresponden a la primera y cuarta fases, donde se muestran los desplazamientos, esfuerzos
principales y deformaciones plásticas equivalentes.
Primera fase: finalización de la construcción de la presa
Análisis estático no-lineal
Para el análisis no- lineal de esta construcción se emplean algunos procedimientos
avanzados de solución de ecuaciones no- lineales. El método en cuestión es el de
Newton-Raphson, empleando una relación constitutiva de plasticidad asociada de
Mohr-Coulomb (ver apéndices).
El primer análisis, denominado primera fase, sólo considera la configuración de la
construcción hasta una elevación del bordo de 24.5 m. Sólo se involucra el peso
propio del material constituyente de la presa. Las deformaciones inelásticas
equivalentes y su localización mostrarán el daño y su influencia en la estabilidad
global de la estructura. Los desplazamientos totales obtenidos por el peso propio del

10
material, incluyendo en el análisis los esfuerzos iniciales calculados en el análisis
elástico, indica configuración geométrica en los taludes de la construcción.
Figura 5 Desplazamientos en dirección X por peso propio
Figura 6 Desplazamientos en dirección Y por peso propio
Figura 7 Norma de los Desplazamientos por peso propio

11
Figura 8 Resultados elásticos de Desplazamientos por peso propio
En las Figs. 5 y 8 se pueden apreciar los gráficos que representan los
desplazamientos, el primero de los mencionados, es un gráfico de contornos donde
se muestran que las diferencias de colores representan la posible geometría de la
deformación en la estructura. La segunda gráfica es más explícita y presenta la
configuración de desplazamientos cuando sólo se considera que el comportamiento
del material de la presa es elástico. Aunque la Fig. 5 es respecto al análisis no-lineal,
y se debería comparar con los resultados observados en la Fig.7, se trata de observar
las diferencias que existen en nomenclatura para la interpretación de resultados. La
Fig. 5 sólo representa una componente de desplazamiento respecto al eje global X,
lo cual para consideraciones científicas o técnicas carece de seriedad, pues los
desplazamientos en una cantidad física que depende de la magnitud y su dirección,
como si lo muestra las Figs. 5 y 8, representando la forma vectorial de esta cantidad.
Así, para fines de claridad, se adoptarán las representaciones que se observan en las
Figs. 5 y 8. Ya comparando estas dos gráficas, se pueden ver las diferencias en
disposiciones geométricas obtenidas de un análisis elástico y uno inelástico

12
suponiendo que el material se comporta según modelos de plasticidad de Coulomb.
La consideración de los esfuerzos iniciales en el suelo es importante para describir
realmente su estado de tensiones. Por ello, también se demuestra que los resultados
que se obtienen son consistentes con lo observado experimentalmente, es decir, la
representación clara de l fenómeno de dilatancia en los medios continuos como el
material de la presa.
Figura 9 Resultados no-lineales de Desplazamientos por peso propio
Los resultados preliminares de desplazamientos en los modelos numéricos no-
lineales, demuestran la consistencia de emplear un modelo de plasticidad para
representar el comportamiento inelástico del material; ya con este antecedente, a
continuación se describen la configuración de los esfuerzos principales y la
localización de deformaciones inelásticas, asociadas al daño en la presa.

13
Figura 10 Resultados no-lineales de esfuerzos por peso propio
La Fig. 10 muestra el estado de tensiones principales que se produce en el cuerpo de
la presa por efectos del peso propio. Las líneas largas, que están prácticamente
verticales en la parte inferior central de la presa, son representaciones de la
compresión por efecto de soporte del su peso. En aquellas zonas, por el fenómeno
de dilatancia, asociado en elasticidad al efecto de Poisson, ocasionan líneas
perpendiculares a las líneas de compresión, casi horizontales, que originan esfuerzos
de tracción relacionadas al daño, pero, en este caso, son de muy baja magnitud. Este
daño aparente, debido a consideraciones de un modelo numérico, se presenta en la
Fig. 11 como concentraciones de deformaciones plásticas equivalentes, la cual se
toma como una medida de la magnitud del daño. Las dimensiones de los triángulos
están en función del tamaño de las deformaciones equivalentes. Para dar una idea
ingenieril, se debe indicar que en esta representación de daño, éste es pequeño
debido a que las deformaciones son bajas, 4.109 mm por metro, por ello, a pesar que
las dimensiones de los triángulos pueden parecer exageradas, la graficación se hace
de esta manera con el propósito de observar donde se registran los primeros daños
por efectos de peso propio, que no afecta en absoluto la estabilidad de la
14
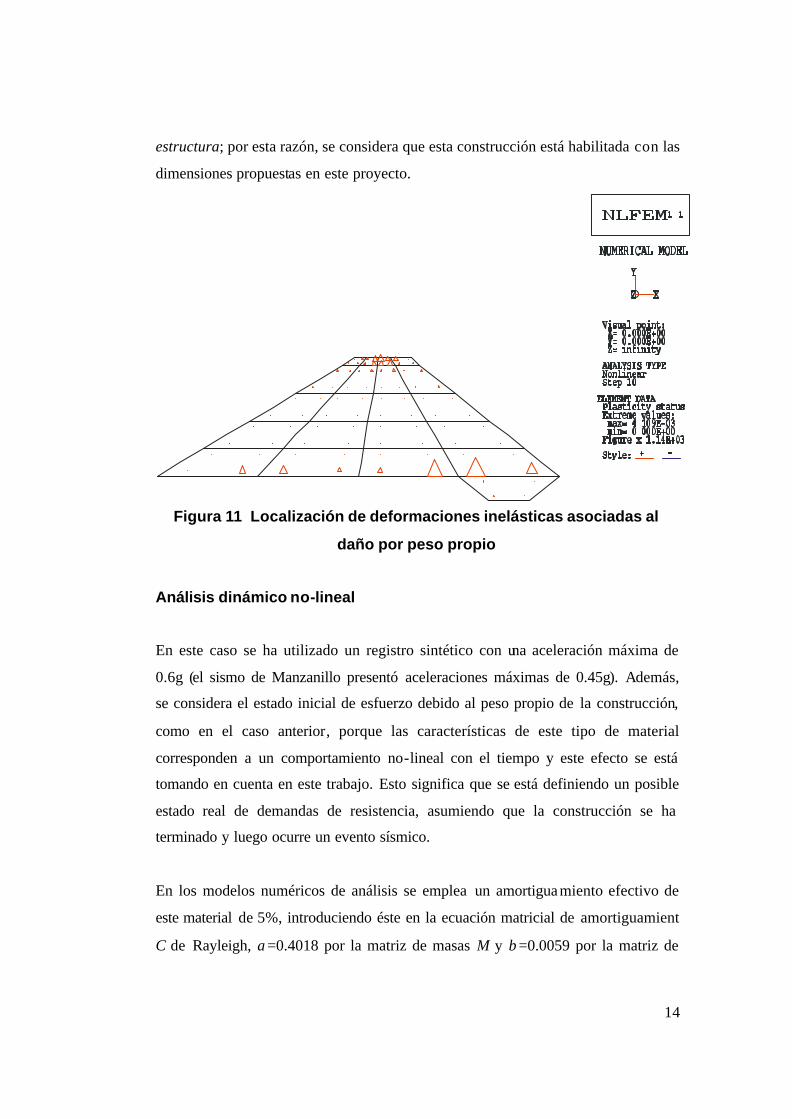
estructura; por esta razón, se considera que esta construcción está habilitada con las
dimensiones propuestas en este proyecto.
Figura 11 Localización de deformaciones inelásticas asociadas al
daño por peso propio
Análisis dinámico no-lineal
En este caso se ha utilizado un registro sintético con una aceleración máxima de
0.6g (el sismo de Manzanillo presentó aceleraciones máximas de 0.45g). Además,
se considera el estado inicial de esfuerzo debido al peso propio de la construcción,
como en el caso anterior, porque las características de este tipo de material
corresponden a un comportamiento no-lineal con el tiempo y este efecto se está
tomando en cuenta en este trabajo. Esto significa que se está definiendo un posible
estado real de demandas de resistencia, asumiendo que la construcción se ha
terminado y luego ocurre un evento sísmico.
En los modelos numéricos de análisis se emplea un amortiguamiento efectivo de
este material de 5%, introduciendo éste en la ecuación matricial de amortiguamient
C de Rayleigh, α=0.4018 por la matriz de masas M y β=0.0059 por la matriz de

15
rigidez tangente K, valor que se usa en las ecuaciones no-lineales de movimiento
dinámico como se observa en la siguiente expresión:.
C M Kα β= ⋅ + ⋅ (2)
Se debe considerar que, por las características propias del modelo constitutivo, el
cual es un modelo de fricción, la respuesta inelástica también considera las
características disipadoras precisadas en las relaciones matemáticas que definen el
comportamiento no- lineal del material; es decir, el modelo implícitamente, mediante
la fricción interna , desarrolla la estabilidad numérica en las ecuaciones dinámicas.
Para modelar las cargas debidas al sismo se emplea la parte más intensa del registro.
La duración de este sismo se establece a partir de los valores del 5% y 95% de la
intensidad de Arias. La duración se muestra en la tabla 3. Estos resultados permiten
definir, en un diagrama de intensidades de tipo trapezoidal, las características del
movimiento, especialmente la parte intensa de éste. Con este valor se establecen los
tiempos de elevación a la fase intensa y la duración del decaimiento del movimiento
sísmico.
Las ecuaciones no- lineales de movimiento se integran mediante el método de
Newmark usando como parámetros de integración δ=0.5 y α=0.25 para que este
proceso de integración sea incondicionalmente estable con pasos de integración de
tiempo de 0.01 seg como se tiene en los registros de aceleración.
Los resultados del análisis dinámico, a cada 6.6 segundos del registro, se reportan en
las siguientes gráficas, hasta 66 segundos de duración de registro sintético con una
aceleración máxima de 0.6g.

16
Descripción 1 2 3 4Nombre de archivo MZ029510.092 MZ019510.061 MZ019510.092 MZ019510.092Estación TERMOELECTRICA TERMOELECTRICA TERMOELECTRICA TERMOELECTRICAClave de la estación MZ02 MZ01 MZ01 MZ01Intervalo de registro 0.01 0.01 0.01 0.01Hora (GMT) 15:35:51 05:13:24 15:35:51 15:35:51Fecha (GMT) 09/10/1995 06/10/1995 09/10/1995 09/10/1995Coordenadas de la estaciónLatitud(N) 19.07 19.07 19.07 19.07Longitud(W) 104.34 104.34 104.34 104.34Altitud (msnm) 0.0 0.0 0.0 0.0Coordenadas del epicentroLatitud(N) 18.74 18.53 18.74 18.74Longitud(W) 104.67 104.8 104.67 104.67Profundidad (Km) 5.00 137.00 5.00 5.00Distancia Epicentral(Km) 50.57 77.22 50.57 50.57Aceleración máxima (gals)V 61.49 67.02 302.86 302.86N00E 78.89 106.34 387.62 387.62N90E 79.04 183.21 387.13 387.13Duración del registroMagnitud 7.1 5.2 7.5 7.1V 15.33 45.3 154.62 154.62N00E 15.33 45.3 154.62 154.62N90E 15.33 45.3 154.62 154.62Intensidad de Arias-N00EIa(cm/seg) 1.30E+01 8.28E+00 4.40E+02 4.04E+02Duración (seg) 13.3 7.41 38.8 39.8Punto inicial (Ti) 108 750 1133 1141Punto final (Tf) 1434 1491 5013 5120Intensidad de Arias-N90EIa(cm/seg) 1.14E+01 1.91E+01 4.66E+02 4.12E+01Duración (seg) 12.6 4.86 45.6 58.7Punto inicial (Ti) 142 739 1132 116Punto final (Tf) 1400 1225 5688 5989Tiempos de función de intensidad (seg)Trise 0.000 0.000 0.000 0.000T level 12.164 3.610 16.427 12.164T tlvl 12.164 3.610 16.427 12.164
Tabla 3 Cálculo de duración de fase intensa de registros
Figura 12 Desplazamientos a 6.6 seg de evolución del sismo sintético

17
Figura 13 Esfuerzos a 6.6 seg de evolución del sismo sintético
Figura 14 Localización de nuevas deformaciones inelásticas a 6.6 seg
de evolución del sismo sintético

18
Figura 15 Desplazamientos a 66 seg de evolución del sismo sintético
Figura 16 Esfuerzos a 66 seg de evolución del sismo sintético
19
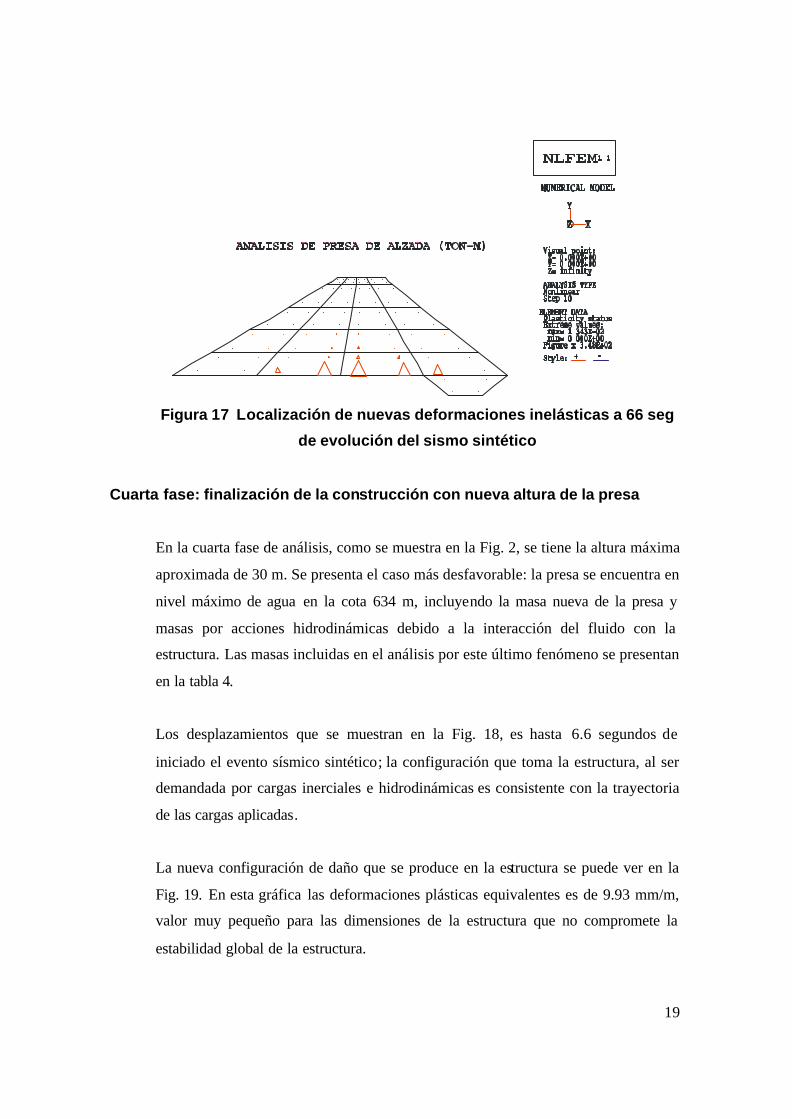
Figura 17 Localización de nuevas deformaciones inelásticas a 66 seg
de evolución del sismo sintético
Cuarta fase: finalización de la construcción con nueva altura de la presa
En la cuarta fase de análisis, como se muestra en la Fig. 2, se tiene la altura máxima
aproximada de 30 m. Se presenta el caso más desfavorable: la presa se encuentra en
nivel máximo de agua en la cota 634 m, incluyendo la masa nueva de la presa y
masas por acciones hidrodinámicas debido a la interacción del fluido con la
estructura. Las masas incluidas en el análisis por este último fenómeno se presentan
en la tabla 4.
Los desplazamientos que se muestran en la Fig. 18, es hasta 6.6 segundos de
iniciado el evento sísmico sintético; la configuración que toma la estructura, al ser
demandada por cargas inerciales e hidrodinámicas es consistente con la trayectoria
de las cargas aplicadas.
La nueva configuración de daño que se produce en la estructura se puede ver en la
Fig. 19. En esta gráfica las deformaciones plásticas equivalentes es de 9.93 mm/m,
valor muy pequeño para las dimensiones de la estructura que no compromete la
estabilidad global de la estructura.

20
Nudo mx my mxy
58 9.486 2.372 4.743 59 17.990 4.498 8.995 61 16.951 4.238 8.475 62 15.844 3.961 7.922 64 14.653 3.663 7.327 65 13.357 3.339 6.678 67 11.920 2.980 5.960 68 10.285 2.571 5.142 70 5.254 1.314 2.627 82 2.021 0.505 1.010 84 2.163 0.541 1.082 130 2.141 0.535 1.071 132 1.748 0.437 0.874 133 1.236 0.309 0.618 135 0.000 0.000 0.000
Tabla 4 Masas equivalentes usando la ecuación parabólica de Westergaard
Figura 18 Desplazamientos a 6.6 seg de evolución del sismo sintético
De los resultados obtenidos de los experimentos numéricos se puede observar que el
máximo esfuerzo cortante a los 46.20 seg de la simulación numérica fue de 14.56
T/m2 (1.456 kg/cm2) valor menor al de 1.5 kg/cm2 para el cortante no drenado del

21
ensayo triaxial. Lo que demuestra que la estructura no sufre de daño considerable ni
los taludes son susceptibles a fallar.
Figura 19 Localización de nuevas deformaciones inelásticas a 6.6 seg
de evolución del sismo sintético
Figura 20 Desplazamientos a 66 seg. de evolución del sismo sintético

22
Figura 21 Localización de nuevas deformaciones inelásticas a 66 seg
de evolución del sismo sintético
Consideraciones y Recomendaciones
En este estudio se han realizado las simulaciones de distintas etapas de la construcción de la
presa que se han pensado como las más demandantes de resistencia. En todas las fases de
análisis, cuyos resultados se presentan en el disco compacto de información, las
localizaciones de deformaciones asociadas a daño no se han propagado de forma repentina
en el cuerpo de la presa durante las simulaciones, mostrando además que los valores de
deformaciones son muy bajos. La máxima deformación inelástica que se presenta es en la
cuarta fase, la más crítica para la estructura, en este caso 4.904 cm/m. Se hace hincapié que
el registro sintético se diseño para que tenga una aceleración máxima de 0.6g (588.6
m/seg2) que es mayor al valor máximo correspondiente del registro de Manzanillo en
octubre del año 95 (0.4g=392.4 m/seg2). Además, el máximo esfuerzo cortante encontrado
en la simulación se produjo a los 46.2 segundos de iniciado la carga sísmica sobre la
estructura. Este cortante tiene un valor de 14.56 T/m2.

23
Con base a los resultados se afirma que, para efectos dinámicos, la resistencia cortante que
se debe obtener con la mezcla de los materiales de banco debe ser mínimo de 1.5 kg/cm2
para que soporte adecuadamente eventos sísmicos similares a los presentados en este
trabajo.
Para la carga estática por peso propio y presión lateral del líquido contenido por la presa, el
ángulo de fricción interna debe ser mayor o igual a los 30º con una cohesión que supere las
5 T/m2 (0.5 kg/cm2).
Estos valores deben se deben reflejar en campo y deben ser certificados por un laboratorio
de mecánica de suelos competente para garantizar la calidad de la construcción.

24
APÉNDICES

25
APÉNDICE A
A.1 ACCIÓN SÍSMICA EN EL MODELO NUMÉRICO
A.1.1 INTRODUCCIÓN A LAS SEÑALES SÍSMICAS
Un terremoto, seísmo, sismo o temblor de tierra es un movimiento vibratorio del suelo que
modifica el estado de reposo relativo de los cuerpos que se apoyan directamente sobre él.
Cuando un sismo se presenta causa muchas veces temor y pánico, porque se mueve aquello
que los sentidos nos dicen que debe ser firme y porque en ocasiones destruyen las
construcciones.
En años recientes se ha avanzado mucho en el conocimiento del origen de los sismos y de
los mecanismos geológicos involucrados. La ciencia que se dedica al estudio de las
características de los sismos es una rama de la geofísica que se llama sismología (Aki y
Richards, 2002).
Debido a la gran importancia que en el contexto de la sismología tiene n las señales, el
propósito de ésta parte del informe cons iste en presentar las ideas y las nociones necesarias
para entender el concepto de las señales y como interactúa con la sismología. No es
únicamente en dicha área donde las señales han adquirido importancia; también en otros
campos del conocimiento, tales como telecomunicaciones, aeronáutica, acústica, ingeniería
biomédica, medicina en general, sistemas de generación y distribución de energía eléctrica,
control de procesos de transformación y de manufactura, uso doméstico y entretenimiento.

26
En cada una de esas áreas del conocimiento, las señales utilizadas son de distinta
naturaleza, en acústica se trata de señales generadas por fuentes de sonido como la voz, la
música o cualquier clase de ruido; en control de procesos pueden ser señales de tipo
térmico, mecánico o eléctrico generado por los mismos procesos; en medicina pueden ser
señales eléctricas o magnéticas generadas por el organismo humano; y en particular en el
área de sismología se trata de señales mecánicas, es decir movimientos o vibraciones de la
corteza terrestre.
Sin embargo, todas ellas tienen algo en común: cada señal tiene una o más características
que reflejan el comportamiento de uno o varios fenómenos físicos; es decir que alguna de
sus características contiene información acerca de los fenómenos físicos que entran en
juego.
Para analizar esto con más detalle, se estudia el área de interés: la sismología. El fenómeno
físico participante en la generación de un sismo es el movimiento brusco de las capas que
forman la corteza terrestre. La liberación de energía, produce movimientos en la superficie
terrestre, ocasionando lo que se conoce como sismo. Dicho movimiento tiene ciertas
características, tales como intensidad y naturaleza ondulatoria. Si el movimiento de la
superficie terrestre se traduce de alguna manera a una señal eléctrica, las características de
la señal sísmica se preservan, pero en este caso se cuenta con una señal que puede ser
estudiada con mayor facilidad que la señal mecánica original (Santiago, 2004).
A.1.2 CARACTERÍSTICAS FUNDAMENTALES DE LAS SEÑALES
De la explicación anterior se aprecia la dependencia que existe entre el tiempo y una señal,
en otras palabras: conforme avanza el tiempo los movimientos de la tierra cambian de
sentido y también conforme avanza el tiempo, la intensidad de los movimientos disminuye
hasta que todo vuelve a un estado de reposo.
Dos parámetros son suficientes para caracterizar esta señal. En primer lugar el parámetro A
determina la altura de la vibración y recibe el nombre de amplitud de onda. En segundo

27
lugar, el parámetro T, determina la duración de un ciclo de vibración y recibe el nombre de
período. El período se define como el tiempo que tarda la vibración en repetirse.
Frecuentemente se representa el movimiento armónico como la proyección sobre una línea
recta, de un punto que se mueve en una circunferencia a velocidad constante. La cantidad ?
es la velocidad angular, la cual está generalmente en unidades de radianes por segundo
(rad/s) y se le denomina frecuencia circular. Como el movimiento se repite cada 2p
radianes, se tiene :
22 f
Tπ
ω π= = (A.1)
en donde f es la frecuencia del movimiento armónico.
En el tratamiento de vibraciones el concepto de frecuencia se utiliza para describir la
rapidez con la que una vibración se repite. La rapidez de vibración es inversamente
proporcional a la duración del período, por lo tanto se define el concepto de frecuencia f
como el inverso del período, es decir f = 1 / T. De este modo la frecuencia es un indicador
directo de la velocidad de la vibración, y por lo tanto es más intuitivo. Sus unidades son las
de ciclos por unidad de tiempo. Cuando la unidad de tiempo es el segundo, la unidad de
frecuencia se llama Hertz, Hz (Aki y Richards, 2002).
A.2 CLASIFICACIÓN DE LAS SEÑALES
El mejor método de representación de señales en una situación dada, depende del tipo de
señal que se considere. A continuación se mencionan algunas de las clasificaciones más
útiles de señales que son necesarias para representar las señales sísmicas.
A.2.1 Señales periódicas
Una señal periódica es la que se repite exactamente a si misma después de un intervalo de
tiempo fijo.
28
A.2.2 Señales deterministas
En una señal determinista sus valores no tienen incertidumbre. Casi siempre puede
escribirse una expresión matemática para tales señales.
A.2.3 Señales aleatorias
Una señal aleatoria es aquella sobre la que se tiene algún grado de incertidumbre antes de
que ocurra realmente. Esta señal se puede considerar como perteneciente a un conjunto de
señales, todas ellas diferentes.
La importancia de las señales aleatorias para este trabajo, radica en que las señales sísmicas
forman parte de ellas, por lo que una vez definidos los conceptos básicos de las señales, es
necesario introducir los conceptos necesarios para el tratamiento de las señales aleatorias,
empezando por definir algunos términos estadísticos de las funciones aleatorias.
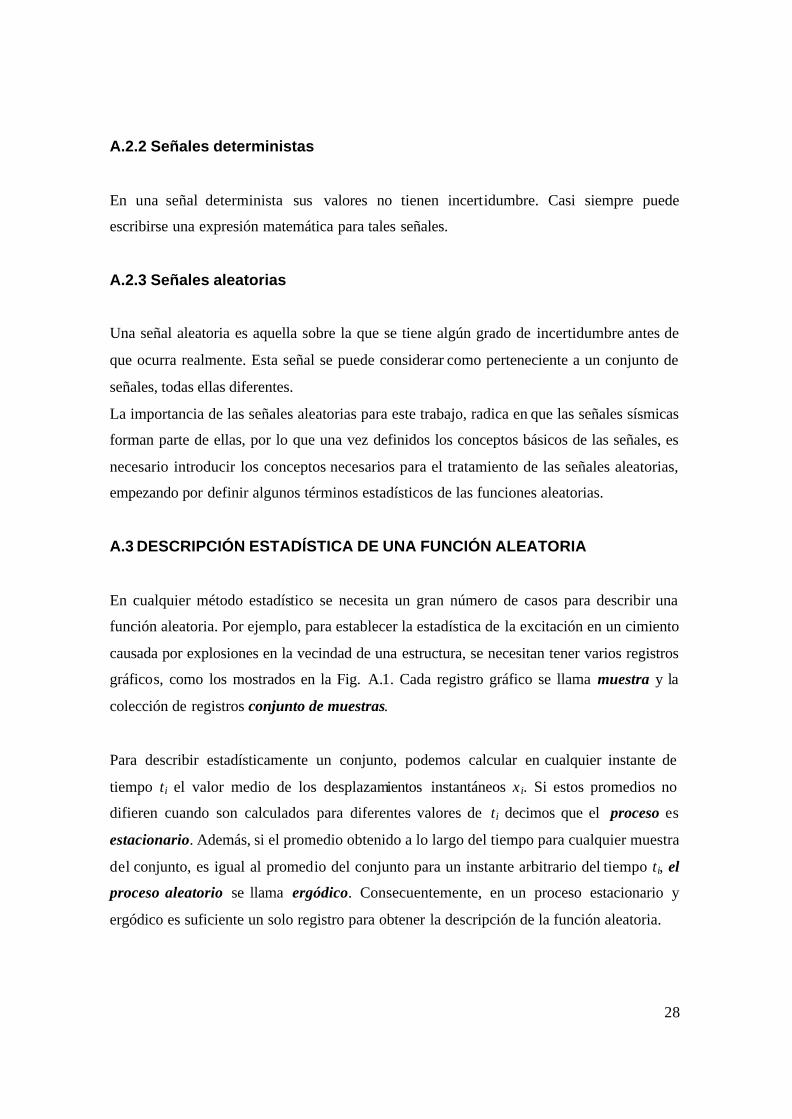
A.3 DESCRIPCIÓN ESTADÍSTICA DE UNA FUNCIÓN ALEATORIA
En cualquier método estadístico se necesita un gran número de casos para describir una
función aleatoria. Por ejemplo, para establecer la estadística de la excitación en un cimiento
causada por explosiones en la vecindad de una estructura, se necesitan tener varios registros
gráficos, como los mostrados en la Fig. A.1. Cada registro gráfico se llama muestra y la
colección de registros conjunto de muestras.
Para describir estadísticamente un conjunto, podemos calcular en cualquier instante de
tiempo ti el valor medio de los desplazamientos instantáneos x i. Si estos promedios no
difieren cuando son calculados para diferentes valores de ti decimos que el proceso es
estacionario. Además, si el promedio obtenido a lo largo del tiempo para cualquier muestra
del conjunto, es igual al promedio del conjunto para un instante arbitrario del tiempo ti, el
proceso aleatorio se llama ergódico. Consecuentemente, en un proceso estacionario y
ergódico es suficiente un solo registro para obtener la descripción de la función aleatoria.

29
Figura A.1 Registros de aceleraciones en Colima como conjunto de variables aleatorias en el tiempo
La función aleatoria del tiempo, representada en la Fig. A.2, ha sido registrada en un
intervalo de tiempo T. Varios valores son útiles para describir esta función aleatoria. Los
más comunes son la media (o promedio) x que se define como:
( )0
1 T
x x t dtT
= ∫ (A.2)
Figura A.2 Esquema de una función aleatoria en el tiempo
x(t)
t
T

30
y la media cuadrática definida de la siguiente manera:
( )2 2
0
1 T
x x t dtT
= ∫ (A.3)
Estos dos valores, la media y la media cuadrática, nos dan medidas del valor medio de la
función aleatoria x(t). La medida de en cuánto difiere la función x(t) respecto de su media
está dada por la varianza, que se define como:
( )2
2
0
1 T
x x x t dtT
σ = − ⋅ ∫ (A.4)
Cuando la expresión bajo la integral de la ec. (A.4) se desarrolla e integra, se encuentra que:
( )22 2x x xσ = − (A.5)
que expresa que la varianza puede calcularse como la diferencia entre la media cuadrática y
el cuadrado de la media. En muchos casos la media es igual a cero y, por lo tanto la
varianza es igual a la media cuadrática. La desviación estándar s x de x(t) es la raíz
cuadrada de la varianza.
La correlación es una medida de la similitud entre dos cantidades. Como se aplica a ondas
de vibración, la correlación es un análisis en el dominio del tiempo útil para detectar
señales periódicas ocultas, y para determinar otra información relacionada a sus
características espectrales que se discuten mejor utilizando transformadas de Fourier. Si se
consideran los dos registros gráficos x1(t) y x2(t) mostrados en la Fig. A.3, la correlación
entre éstos dos registros se calcula multiplicando sus ordenadas para cada tiempo ti y
calculando el valor medio, dividiendo la suma de los productos por el número de ellos. Es
evidente que la correlación determinada de esta forma será mayor cuánto más similares
sean los dos registros. Para registros no similares, algunos de los productos serán positivos
y otros negativos así que su suma será más pequeña.

31
Figura A.3 Correlación entre dos funciones aleatoria en el tiempo
Considerando ahora, los dos registros mostrados en la Fig. A.4 en que la función x1(t) es
idéntica a x(t) pero desplazada hacia la izquierda en la cantidad t , esto es, x1(t) = x(t + t ).
Aquí si t = 0, se tiene correlación completa. Cuando t crece, la correlación decrecerá.
Puesto que el segundo registro de la Fig. A.4 puede considerarse atrasado con respecto al
primero, o el primer gráfico avanzado con respecto al segundo, es evidente que R(t ) = R(-t )
es una función simétrica con respecto al origen t=0 y es siempre menor que R(0).
Funciones que son altamente aleatorias, como la función representada en la Fig. A.2,
pierden su similitud en un corto desplazamiento de tiempo. La autocorrelación de tales
funciones, por lo tanto, tiene un pronunciado valor para t = 0 y decae rápidamente cuando t
se aleja de cero, como lo muestra la Fig. A.5
x1(t)
x2(t)
t
ti
t

32
Figura A.4 Autocorrelación para la función x(t) aleatoria en el tiempo
A.4 FUNCIÓN DE DENSIDAD ESPECTRAL Si un proceso aleatorio x(t) es normalizado o ajustado de manera que la media del proceso
sea cero, entonces, siempre que x(t) no contenga componentes periódicas, la función de
autocorrelación Rx(t ) tiende a cero a medida que t aumenta de valor (ver ec. A.6).
Figura A.5 Autocorrelación para un proceso aleatorio
( )lim 0xRτ
τ→∞
= (A.6)
x1(t)
x(t)
x(t)
τ
x1(t)=x(t+τ) t
t
R(τ)
τ

33
Si se aplica la transformada de Fourier para la función de autocorrelación Rx(t ) y se obtiene
la siguiente función:
( ) ( )12
ix xS R e dωτω τ τ
π
∞−
∞
= ⋅∫ (A.7)
En la ec. 7.A., Sx(? ) es la función de densidad espectral de x(t). Si se aplica la
transformada inversa de Fourier a la función Sx(? ) se obtiene la función de autocorrelación:
( ) ( ) ix xR S e dωττ ω τ
∞
∞
= ⋅∫ (A.8)
La propiedad más importante de Sx(? ) se hace notoria cuando t = 0 en la ec. A.8. En este caso:
( ) ( )0x xR S dω τ∞
∞
= ⋅∫ (A.9)
que como se había mencionado en párrafos anteriores RX(0) es igual a la media cuadrática,
esto es:
( )2xx S dω τ
∞
∞
= ⋅∫ (A.10)
La media cuadrática de un proceso aleatorio viene, por lo tanto, dada por el área bajo el
gráfico de la función de densidad espectral. El desarrollo anterior describe una de las
formas en que se puede obtener la función de densidad espectral a partir de la función de
autocorrelación.
La importancia del estudio de esta función radica en que la función de densidad espectral
de una señal representa su energía por unidad de frecuencia y muestra las contribuciones
relativas de energía de las distintas componentes de la frecuencia. El área bajo la función de
densidad espectral proporciona la energía dentro de una banda de frecuencias dada.

34
A.5 RUIDO BLANCO
Un proceso aleatorio cuya función de densidad espectral tiene valores distintos de cero
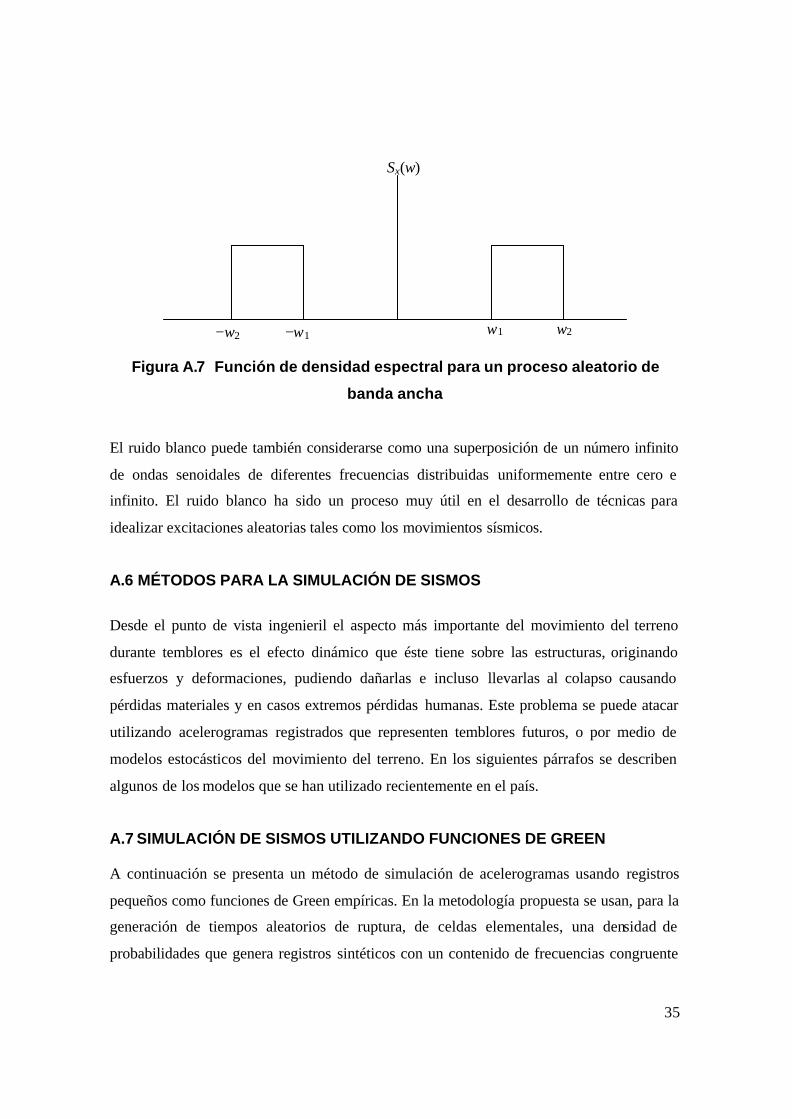
solamente en un intervalo angosto de frecuencias, como se muestra en la Fig. A.6, se
conoce con el nombre de proceso de banda angosta. Por el contrario, un proceso de banda
ancha es uno cuya función de densidad espectral no es cero en un intervalo ancho de
frecuencias. La historia en el tiempo de un proceso de banda ancha está compuesta por la
superposición de muchas frecuencias, como se ilustra en la Fig. A.7. En el límite, cuando la
banda de frecuencias se extiende desde ? 1 = 0 a ? 2 = ∞ el espectro se llama ruido blanco
por analogía con el color blanco que se obtiene mediante la superposición de todos los
colores del espectro luminoso. Según la ec. A.10, la media cuadrática de un proceso con
ruido blanco debe ser infinito; por lo tanto, el proceso de ruido blanco es sólo un concepto
teórico. En la práctica a un proceso se le llama de ruido blanco cuando las frecuencias en su
ancho de banda se extienden bastante más allá de las frecuencias de interés.
Figura A.6 Función de densidad espectral para un proceso aleatorio de
banda angosta
Sx(ω)
ω1+∆ω ω1 −ω1−∆ω −ω1 ω
35
Figura A.7 Función de densidad espectral para un proceso aleatorio de
banda ancha
El ruido blanco puede también considerarse como una superposición de un número infinito
de ondas senoidales de diferentes frecuencias distribuidas uniformemente entre cero e
infinito. El ruido blanco ha sido un proceso muy útil en el desarrollo de técnicas para
idealizar excitaciones aleatorias tales como los movimientos sísmicos.
A.6 MÉTODOS PARA LA SIMULACIÓN DE SISMOS
Desde el punto de vista ingenieril el aspecto más importante del movimiento del terreno
durante temblores es el efecto dinámico que éste tiene sobre las estructuras, originando
esfuerzos y deformaciones, pudiendo dañarlas e incluso llevarlas al colapso causando
pérdidas materiales y en casos extremos pérdidas humanas. Este problema se puede atacar
utilizando acelerogramas registrados que representen temblores futuros, o por medio de
modelos estocásticos del movimiento del terreno. En los siguientes párrafos se describen
algunos de los modelos que se han utilizado recientemente en el país.
A.7 SIMULACIÓN DE SISMOS UTILIZANDO FUNCIONES DE GREEN A continuación se presenta un método de simulación de acelerogramas usando registros
pequeños como funciones de Green empíricas. En la metodología propuesta se usan, para la
generación de tiempos aleatorios de ruptura, de celdas elementales, una densidad de
probabilidades que genera registros sintéticos con un contenido de frecuencias congruente
ω2 ω1 −ω1 −ω2
Sx(ω)

36
con el modelo sismológico ? 2, en toda la banda de interés. Por tratarse de un modelo de
simulación sobre bases físicas, no es necesario recurrir a funciones de modulación ni en el
tiempo ni en la frecuencia. Una suposición importante es la de dividir el área de falla en
varias partes y emplear en cada una de estas partes una función de Green.
A.7.1Conceptos básicos del método
Antes de describir la metodología empleada para la generación de sismos sintéticos es
necesario describir algunos conceptos que son necesarios para entender el método.
A.7.1.1 Caída de esfuerzos : Diferencia entre los esfuerzos que existen en la tierra antes y
después de un sismo.
A.7.1.2 Frecuencia de esquina : El espectro de Fourier de desplazamientos de un registro
sísmico tiene la forma de la Fig. A.8. En ella se puede apreciar que el espectro de Fourier
de desplazamiento del suelo registrado en cualquier sismógrafo puede simularse como una
función que es plana en bajas frecuencias, luego decae como ? -1 para frecuencias
intermedias, para luego decaer como ? -2 para altas frecuencias. Este modelo se utiliza en
muchas aplicaciones de ingeniería sísmica para simular el contenido de frecuencias que
debemos esperar en un sismo. El valor de la frecuencia donde se pasa de ? -1 a ? -2 se le
denomina frecuencia de esquina fe.
Figura A.8 Representación de la frecuencia de esquina
f
Amplitud de espectro de Fourier de Velocidades
Plano ω-1
ω-2
fe

37
A.7.1.3 Tiempo de ruptura : Es el tiempo que tarda la falla en romper desde el origen hasta
el área máxima de ruptura, también conocida como el área de falla.
A.7.1.4 Función de Green: El campo de desplazamientos o aceleraciones debido a una
fuente sísmica simple, o puntual, es llamado función de Green y en el caso más sencillo
esta fuente es una fuerza puntual. En este caso la función de Green es la respuesta del
medio elástico en el espacio y tiempo.
A.8 DESCRIPCIÓN DEL MÉTODO
El método de simulación de temblores usando registros de eventos pequeños como
funciones de Green empíricas fue propuesto por Hartzell (1978). La idea central del
procedimiento es que un acelerograma generado por un temblor de pequeña magnitud está
muy probablemente asociado a una fuente sísmica simple, por lo que las complejidades
observadas en el acelerograma son atribuibles exclusivamente a las modificaciones que
sufren las ondas por efectos de trayecto y de sitio. El registro del temblor pequeño puede
considerarse como la función de Green del medio, es decir, la aceleración que se produce
en el sitio de registro cuando en la fuente se aplica una dislocación puntual. Para simular un
acelerograma asociado a un temblor de diferente magnitud bastaría conocer la historia de
las dislocaciones elementales en la fuente correspondiente y efectuar la convolución de esta
función de fuente con la función de Green. Se han desarrollado diferentes técnicas para
llevar a cabo simulaciones siguiendo esta idea. En esta metodología se muestra otra técnica
que, partiendo de la propuesta de Joyner y Boore (1988) –la cual se presenta en el Apéndice
A-, supera algunas de sus limitaciones y produce acelerogramas simulados con el contenido
de frecuencias predicho por el modelo de fuente de Brune (1970) y que presentan
envolventes realistas en el dominio del tiempo y evolución razonable del contenido
espectral sin tener que recurrir a funciones de modulación.

38
A.8.1 Modelo sismológico ? 2
En general y de manera esquemática, el espectro de amplitudes de Fourier, A(? ), del
acelerograma generado por un sismo, puede expresarse de la siguiente manera:
( ) ( ) ( ) ( )A K S T Lω ω ω ω= ⋅ ⋅ ⋅ (A.11)
Donde K es una constante, T(? ) es un término que incluye las modificaciones que sufre el
espectro por efectos de trayecto, y L(? ) representa las amplificaciones por efectos de sitio;
si se supone comportamiento lineal de los materiales por los que atraviesan las ondas
sísmicas, estos dos términos no dependen del tamaño del temblor. S(? ) es el espectro de
aceleración en la fuente sísmica. De acuerdo con el modelo ? 2 propuesto por Aki (Aki y
Richards, 2002), este espectro está dado por:
( )2
02
1c
MS
ωω
ωω
⋅=
+
(A.12)
donde M0 es el momento sísmico y ? c es la llamada frecuencia de esquina, dada por:
( )13
6
0
4.9 10 2c Mσω πβ
∆= ⋅ ⋅ ⋅
(A.13)
donde ß es la velocidad de propagación (en km/s) de las ondas S y ∆s es la caída de
esfuerzos en bar; en la fórmula anterior, M0 está en dinas-cm. Considerando dos eventos
generados en la misma región y registrados en el mismo sitio. Sean M0e, ∆s e y ? ce los
parámetros del sismo de mayor magnitud y M0s, ∆ss y ? cs los parámetros del sismo de
menor magnitud. El cociente entre sus correspondientes espectros, Q(? ), será:

39
( )
2
02
0
1
1
cse
s
ce
MQ
M
ωω
ωω
ω
+
=
+
(A.14)
Puede observarse que para ? = 0, Q(? ) es el cociente de momentos sísmicos, mientras que,
para valores suficientemente grandes de ? ,
( )1 2
2 3 30 0
20 0
e ce e e
s cs s s
M MQ
M Mω σ
ωω σ
∆= = ∆
(A.15)
De acuerdo con este modelo, que cuenta con amplía verificación empírica, la energía de
baja frecuencia crece más rápidamente que la de alta frecuencia al aumentar la magnitud
del temblor. Es entonces claramente incorrecto escalar con una constante un acelerograma
para simular el registro de un temblor de mayor magnitud.
El proceso de suma de funciones de Green empíricas
Considerando una fuente sísmica puntual dividida en N celdas elementales, cada una de las
cuales genera, comenzando en el instante ti, i = 1,...,N, una señal cuyo espectro de Fourier
es ?As(ω), donde ? es un factor de escala arbitrario. El espectro de la señal resultante,
Ae(ω), valdrá:
( ) ( )1
i
Ni t
e si
A A e ωω ξ ω −
=
= ⋅ ⋅∑ (A.16)
Puede probarse que si los tiempos de ruptura ti son aleatorios, independientes e igualmente
distribuidos con densidad de probabilidad p(t), el valor esperado de ( ) ( )2 2,e eA E Aω ω
estará dado por:

40
( ) ( ) ( ) ( )2 2 22 2e sE A A N N N Pω ξ ω ω = ⋅ ⋅ + − ⋅
(A.17)
donde P(? ) es la transformada de Fourier de p(t). El cociente entre los espectros de
amplitudes, R(? ), podrá entonces estimarse con:
( )( )
( )( ) ( )
2
222
e
s
E AR N N N P
A
ωω ξ ω
ω
= ≈ ⋅ + − ⋅ (A.18)
Se observa lo siguiente: P(0) = 1. Esto implica que R(0) = ?N, de donde se desprende que
para que el cociente espectral obtenido del proceso de suma obedezca al modelo de
escalamiento ? 2, debe cumplirse que ?N = M0e/M0s. Por otra parte, considerando que |P(? )|
debe anularse cuando ? 2, las ecs. 15 y 18 implican que ?N1/2 = (M0e/M0s)1/3(∆s e/∆ss)2/3 . De
estas dos condiciones resulta que para cumplir con el escalamiento del modelo ? 2 :
4 43 3
0
0
e e
s s
MNM
σσ
− ∆= ∆
(A.19)
1 43 3
0
0
e e
s s
MM
σξσ
− ∆= ∆
(A.20)
A frecuencias intermedias, R(? ) depende de P(? ), Joyner y Boore (1988) desarrollaron un
método de simulación en que se elige para los tiempos de ruptura de las celdas elementales
una densidad de probabilidades uniforme entre –Tr/2 y Tr/2, siendo Tr la duración total de la
ruptura del evento que se quiere simular dada por 2p/? ce. Con esta hipótesis, p(t) = 1/Tr, por
lo que P(? ) es:

41
( ) 2
2
r
ce
r
ce
T sensenP
T
π ωω ω
ωπ ω
ωω
⋅ ⋅ = =⋅
⋅ (A.21)
El objetivo es diseñar un esquema de suma de funciones de Green empíricas tal que, en
promedio y para todas las frecuencias, se obtengan temblores con un contenido espectral
congruente con el modelo de escalamiento ? 2. Esto implicaría que Q(? ) = R(? ) para
cualquier valor de ? , ecs. (A.14) y (A.18), en vista de lo cual, además de las ecs. (A.19) y
(A.20), se debe satisfacer la siguiente relación:
( )
2
2
2 2 2
12,
1
cs ce
ce cs
ce
a
P a
ωω ωω
ω ωωω
+ ⋅
⋅ = =+
+
(A.22)
Si además se impone la condición de que P(? ) sea real para evitar cambios de fase en el
proceso de suma, resulta que el esquema de suma deseado es uno en que los tiempos de
ruptura de las celdas elementales tienen una densidad de probabilidades que es la anti-
transformada de Fourier del miembro derecho de la ec. (A.22):
( )
2
2
2 2 2
121 ,
21
cs i t ce
ce cs
ce
a
p t e d aω
ωω ωω
π ω ωωω
∞
−∞
+ ⋅
⋅ = =⋅ +
+
∫ (A.23)
En síntesis, el procedimiento propuesto para simular temblores consiste en superponer N
veces la función de Green empírica escalada por un factor ? desfasándola cada vez un
tiempo ti, i=1,...,N, en que los tiempos ti son aleatorios, independientes, e igualmente
distribuidos con una densidad de probabilidades dada por la ec. (A.23).

42
A.8.2 Comentarios finales acerca de la simulación de sismos utilizando
funciones de Green
Mientras la idea del uso de registros de sismos pequeños como funciones empíricas de
Green para estimar futuros movimientos es muy atractiva, hay dos obvias dificultades en su
aplicación práctica. Primero, en algunos sitios, la suposición de que registros pequeños sean
funciones de Green puede ser insostenible para una falla extendida, porque el patrón de
radiación y la distancia hipocentral para diferentes puntos de la fuente finita no pueden ser
aproximados por un registro solamente. Una alternativa puede ser el uso de diversos
registros de eventos pequeños muestreando el plano completo de la falla para el evento
simulado. La segunda dificultad, es el apropiado proceso de suma de las funciones de
Green. El proceso debe al menos estar en concordancia con el presente estado de
conocimiento de relaciones de escala.
En este método se presentó un proceso de suma de funciones de Green, inspirado por los
trabajos de Joyner y Boore (1988) y Wennerberg (1990), el cual obedece la ley de escala ω2
y produce registros cuyas envolventes son realistas en apariencia. Esto se presenta debido a
la forma de la función de densidad de probabilidad de los tiempos de ruptura. Con este
esquema, la ruptura es simulada por medio de celdas que se rompen en tiempos aleatorios.
La generación de movimientos simulados con éste método requiere la especificación del
momento sísmico y de los parámetros de las funciones empíricas de Green y del evento
simulado. Es razonable asumir que el momento y los parámetros de las funciones de Green
son conocidos. Puesto que la magnitud (y por tanto el momento sísmico) del evento
simulado es especificado necesariamente, sólo los parámetros de la función son libres. Una
alternativa en la elección de los parámetros en el evento simulado es tomar estos valores
iguales a los de la función empirica de Green. Esto puede resultar en una estimación
conservadora, puesto que parece ser evidencia sugerida que los parámetros del evento
simulado son usualmente más pequeños que los del sismo pequeño.
43
A pesar de los defectos mencionados arriba, la aplicación del método para datos observados
en México da buenos resultados.
A.9 SIMULACIÓN DE SISMOS COMPATIBLES CON ESPECTROS DE
RESPUESTA Y DE DISEÑO
A continuación se presenta un método de generación de sismos sintéticos que es muy
sencillo en cuánto a sus bases teóricas, por lo que su sencillez permite incorporar otras
características que hacen que el método sea más congruente con las características de un
sitio en particular. Las características de las señales generadas con esta metodología serán:
los sismos sintéticos serán considerados como un proceso aleatorio; los sismos sintéticos
serán considerados como la parte intensa de un sismo real; y finalmente la más importante
de las características es que los sismos sintéticos son estacionarios en el contenido de
frecuencias pero modulados en amplitud.
A.9.1 Metodología empleada
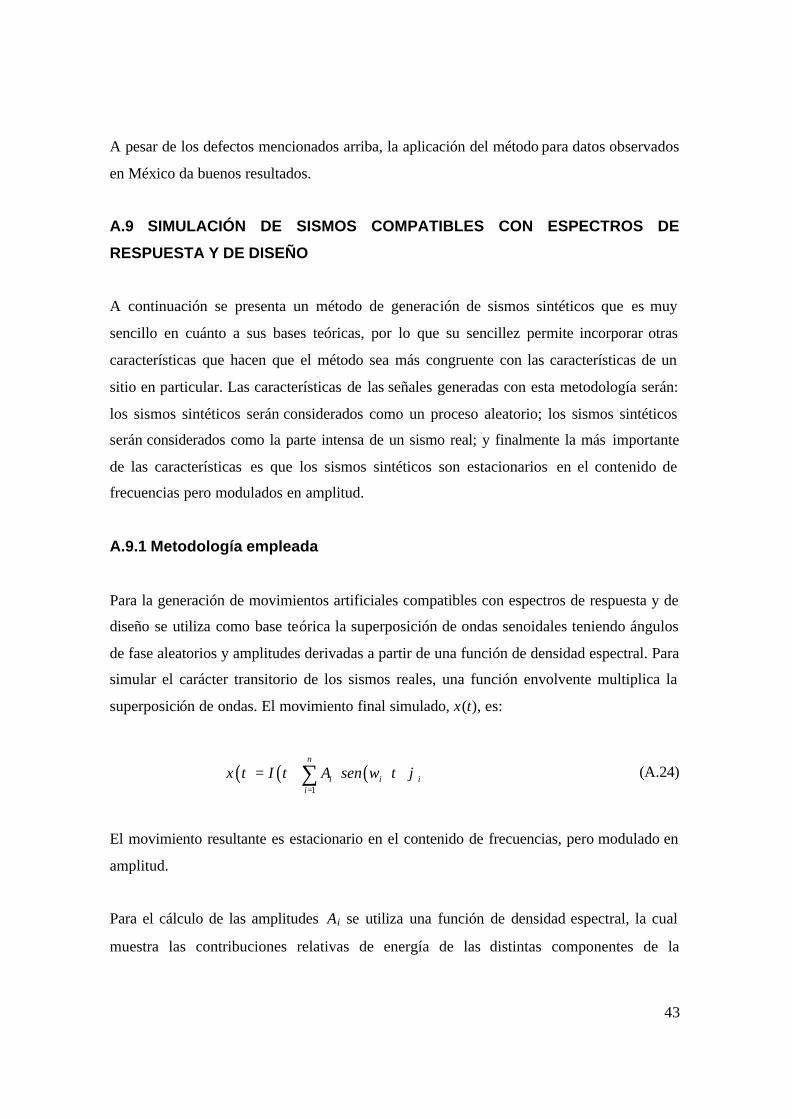
Para la generación de movimientos artificiales compatibles con espectros de respuesta y de
diseño se utiliza como base teórica la superposición de ondas senoidales teniendo ángulos
de fase aleatorios y amplitudes derivadas a partir de una función de densidad espectral. Para
simular el carácter transitorio de los sismos reales, una función envolvente multiplica la
superposición de ondas. El movimiento final simulado, x(t), es:
( ) ( ) ( )1
n
i i ii
x t I t A sen tω ϕ=
= ⋅ ⋅ ⋅ +∑ (A.24)
El movimiento resultante es estacionario en el contenido de frecuencias, pero modulado en
amplitud.
Para el cálculo de las amplitudes Ai se utiliza una función de densidad espectral, la cual
muestra las contribuciones relativas de energía de las distintas componentes de la

44
frecuencia. El área bajo la función de densidad espectral proporciona la energía total del
movimiento estacionario x(t). La Fig. A.9 muestra la re lación existente entre las amplitudes
An del movimiento y las frecuencias del mismo movimiento, esta relación es la función de
densidad espectral G(? ).
Figura A.9 Función de densidad espectral
A.9.2 Generación de la función de densidad a partir de espectros de
respuesta
La función de densidad espectral G(? ) se puede obtener de diferentes maneras, una es a
través de la función de autocorrelación; otra forma es a través del espectro de amplitudes de
Fourier al cuadrado, pero para este estudio se utiliza la desarrollada por Gasparini y
Vanmarcke (1976), la cual establece la relación entre la función de densidad espectral y el
espectro de respuesta de un movimiento real, la cual tiene la forma:
ω
G(ω)
ωi
2
2iA
∆ω
δΩ δΩ
Ω

45
( )( )
( )
122 2
,2, 0
1
14
nn V s p
ns p
ns
SG G d
r
ωωω ω ω
πωζ
⋅ − − ⋅
∫; (A.25)
El factor pico rs,p se puede evaluar de manera aproximada con la siguiente expresión:
( ) ( )( ) ( ) ( )
12
,
0
2 log 2 1 exp log 2
12 log
s p y
y
r n s n
sn s
p
δ π
Ωπ
= ⋅ ⋅ − − ⋅ ⋅ ⋅
= ⋅⋅ −
(A.26)
El factor pico es una función de los momentos espectrales Ωy(s), δy(s) y la duración
equivalente de respuesta estacionaria s0. Esta duración ha sido estimada por Gasparini y
Vanmarcke (1976) como:
( )( )
( )( )
( )( )
2
0 2
22
2
exp 2 12
1
12
n
n
y
y
sy
sy
ss s
s
ess e
ζω
ζω
σ
σ
σ
σ
−
−
= ⋅ − −
−=
−
(A.27)
En periodos cortos, los momentos de la respuesta espectral son iguales a los
correspondientes de la aceleración del terreno. Desde que se logra la que el movimiento sea
estacionario:
( ) ( )( )
( )2
2
,
12
y y
y
y
s s
ss
Ω Ω δ δ
σ
σ
= =
= (A.28)
En periodos moderados o altos:

46
( ) ( )
( )( )
( )( )
12
22
2
4,
1
12
n
n
sy n y
sy
sy
s s
ess e
ζω
ζω
ζΩ ω δ
π
σ
σ
−
−
⋅ = =
−=
−
(A.29)
Se debe tomar en cuenta también que:
21 nt te ζω
ζζ −=
− (A.30)
También se debe señalar que en la ec. (A.25), se ha detectado que la relación entre la
repuesta espectral de velocidad SV y la función de densidad espectral G(ω) no es única. Esta
relación depende de la duración del movimiento más intenso s, el nivel de probabilidad de
excedencia p asignado a SV y al nivel de amortiguamiento ζ involucrado. A función de
densidad espectral, es la clave de la generación de registros de manera probabilística. Para
el cálculo de la función de intensidad I(t) dada en la ec. (A.24) se pueden usar diferentes
formas. Algunas de ellas pueden ser: trapezoidal, exponencial o compuesta. En la siguiente
figura se muestran la función de intensidad trapezoidal empleada en este trabajo.
Figura A.10 Función de intensidad
I(t)
t Televación Tlvl
Tiempo de máxima intensidad
Duración

47
Finalmente, para obtener el sismo sintético se realiza el producto de la sumatoria de ondas
sinusoidales por la función de intensidad arriba mencionada.

48
APÉNDICE B
B.1 TÉCNICAS NUMÉRICAS DE SOLUCIÓN EMPLEADAS EN EL MÉTODO DE
ELEMENTOS FINITOS
El objetivo en esta parte del informe es presentar brevemente los procedimientos numéricos
que se utilizan para el análisis no- lineal de estructuras. En este reporte sólo se consideran
modelos planos de deformación con no- linealidades físicas, ignorándose las no- linealidades
geométricas en los análisis.
También se cree conveniente mencionar que, para el interés particular de cada lector,
durante el desarrollo de este capítulo se señalan las referencias idóneas que profundizan en
los temas que se tratan aquí.
B.1.1 Técnicas numéricas para el análisis no-lineal de estructuras.
El progreso de las técnicas numéricas y el avance científico en la mecánica de sólidos han
tenido un fuerte impacto en la ingeniería estructural. Esta nueva visión de la mecánica
estructural computacional, una disciplina híbrida producto de la mezcla de métodos para el
análisis numérico y la mecánica de sólidos, permite vislumbrar un futuro tecnológico de
mucha relevancia en la ingeniería y ciencias aplicadas (De Bors et al., 1994).
Estos avances tecnológicos se han aplicado al modelado de estructuras de diversos tipos
que requieren un tratamiento numérico exclusivo, especialmente en aquellas donde el
comportamiento inelástico se le asocia al daño observado.

49
Generalmente la solución de un problema no-lineal complejo involucra desarrollar una
serie de etapas de análisis donde cada una de éstas tiene un acoplamiento débil con la etapa
anterior; es decir, la solución final de una es el punto de partida para la siguiente. Este
proceso de continuación posee una jerarquía de procesos que están compuestos de pasos de
carga y fases iterativas durante la aplicación de cada uno de estos pasos (Crisfield, 1991a;
Roeder y Ayala, 2002).
Es importante distinguir los criterios que fijan el tamaño de cada incremento de carga y el
procedimiento iterativo que resuelve las ecuaciones de equilibrio. Se pueden mencionar,
como ejemplos de técnicas que controlan el tamaño del incremento al control de fuerzas, al
control directo y a las distintas versiones de procedimientos de restricción con arco,
incluyendo el control indirecto de desplazamientos. Como paradigmas de procedimientos
iterativos están el método estándar o modificado de Newton Raphson, métodos de iteración
usando la rigidez inicial y otros métodos cuasi-Newton. Otros componentes necesarios en
las estrategias de solución dentro de un esquema incremento- iteración son los criterios de
convergencia y, opcionalmente, las técnicas de aceleración de convergencia, como son las
técnicas de búsqueda de línea, y reglas de control automático de cargas (Press et al., 1992;
Fusco, 1993; Jirásek y Bazant, 2002).
B.1.2 Métodos numéricos para la solución de ecuaciones no-lineales.
El objetivo del análisis no- lineal es obtener la trayectoria que representa el equilibrio de un
sistema estructural sometido a un proceso de cargas que evolucionan con el tiempo. En el
contexto de los elementos finitos esto se lleva a cabo utilizando un procedimiento
incremento- iteración. En cada etapa de análisis de la estructura, los agente externos
causantes del desequilibrio en el sistema, sean fuerzas o desplazamientos, se aplican en
intervalos, comúnmente denominados incrementos, que se van acumulando hasta completar
sus valores finales. De este procedimiento de solución con incrementos se han derivado dos
clases de métodos: métodos puramente de incrementos y métodos correctivos. En el
primero de éstos, enteramente de predicción, no se utilizan fases iterativas para corregir el
no-equilibrio de fuerzas. En el segundo se suceden una o más fases iterativas, después de la

50
fase de predicción, que en conjunto definen la fase correctiva de la etapa de análisis. La
fase correctiva tiene el propósito de eliminar los errores fluctuantes debido al no-equilibrio
de fuerzas y, además, evita la pérdida de precisión en los resultados al ir aumentando la
carga aplicada (Crisfield, 1991a).
En este trabajo de investigación se han aplicado los métodos de incremento- iteración,
presentando, de manera somera, las técnicas numéricas que se utilizan en el análisis no -
lineal de estructuras. Estas técnicas se han implantado en el sistema general de análisis no -
lineal con elementos finitos NLFEM diseñado por el autor de esta tesis (ver apéndices).
B.1.3 Análisis controlado por incrementos de fuerzas.
Con la finalidad de comprender de forma natural cómo se desarrolla el análisis
aprovechando el control de fuerzas, se plantea primero el problema general de equilibrio al
final del incremento n+1hasta terminar de aplicar las fuerzas externas 1ext,n+f :
( )+1 , 1int n e x t n+=f u f (B.1)
En la ec. (B.1) se considera que el vector de fuerzas internas, fint, es función del vector de
desplazamientos un+1. Es conveniente reconfigurar esta ecuación exponiéndola de forma
compacta mediante el vector de fuerzas no-equilibradas ( )1n+uΨ (Zienkiewics y Taylor,
2000b):
( ) ( )1 1 1 1intn+ n+ ext,n+ n+= = − =u f f u 0Ψ Ψ (B.2)
Tomando en cuenta que la solución se obtiene mediante un proceso iterativo, se expande Ψ
en una serie de Taylor en la que se desprecian los términos de órdenes superiores a dos. De
esta operación se obtiene la siguiente expresión:

51
1 Tn
n nn+ δ δ∂
= + = + ≈∂
u K u 0u
ΨΨ Ψ Ψ (B.3)
Así, con las ecs. (B.2) y (B.3) el problema estructural se adapta al patrón de los sistemas de
ecuaciones no- lineales. Estas ecuaciones se resuelven con un proceso estándar de Newton-
Raphson implantado dentro de un esquema de incremento- iteración como se aprecia en la
Fig. B.1 (Crisfield, 1991a).
Figura B.1 Esquema del procedimiento de incremento e iteración.
Cuando los modelos son de gran escala, el método estándar se vuelve excesivamente
demandante en tiempo de cómputo a causa del cálculo de la matriz jacobiana de rigidez
global, KT, que debe ser actualizada con los desplazamientos iterativos, o cuando la
solución está cerca de puntos límites y no puede llegar a un resultado final que converja. En
estos casos es conveniente analizar otras opciones, tales como el empleo de métodos
modificados como el método de la rigidez lineal, o constante, bajo el mismo esquema del
proceso estándar de Newton-Raphson que a la larga pueden exigir mayor número de
iteraciones; sin embargo, cuando existen problemas de bifurcación (Marsden y Hughes,
Desplazamientos
Fuerza
0f
( )11u 0u
1f∆
( )21u ( )3
1u
0uδ 1uδ
1Ψ
2Ψ
3Ψ
Kt

52
1993) se debe tener cuidado al utilizar éstos (Crisfield, 1991b; Bathe, 1996; Jirásek y
Bazant, 2002). Esta técnica de solución se ilustra en el cuadro algorítmico 1.
Cuadro Algorítmico B.1 Procedimiento general de solución: control por fuerzas.
1. Inicio del paso de solución
( ) ( )0 0+1 ,n n n= =u u 0Ψ
2. Ecuaciones no-lineales
( )1 1n n+ +≡ =u 0Ψ Ψ
3. Aproximación de la solución en series de Taylor
( )( )1( 1) ( )
1 1
kkk k
n n nn
δ +++ +
∂ ≈ + = ∂ u 0
uΨ
Ψ Ψ
4. Corrección de la fase de iteración:
( )( ) ( ) ( )
( ) ( )( )( ) ( ) ( ) ( ) ( ) ( ) ( )
1 1( )1
1 ( )1
11 1 1 1
1
,
kk k kk
n n T nn
k k kn T n
kk k k k k k i
n n n n n n ni
δ δ
δ
δ δ
+ ++
++
++ + + +
=
∂ = − = ∂
=
= + = + ∆ ∆ = ∑
u K uu
u K
u u u u u u u
−1
ΨΨ
Ψ
B.2 Control directo de desplazamientos.
Al margen de la selección del algoritmo iterativo, cualquier estrategia de solución colapsa
durante un proceso controlado por fuerzas cuando decae la resistencia de la estructura por
el ablandamiento del material. Esto causa que las fuerzas internas en el modelo estructural
53
no equilibren las cargas externas aplicadas. Este problema se hace más evidente en
procesos donde la magnitud de las fuerzas aumenta monótonamente. En este caso, cuando
la solución se acerca a un punto límite, el control por fuerzas falla al oscilar, o divergir, la
solución.
En muchos análisis se suele considerar como los únicos resultados relevantes el valor
máximo de la carga que soporta una estructura y el desplazamiento que se alcanza en este
máximo. También es común que muchos analistas crean que la divergencia en el proceso
iterativo es un indicador de la falla en la estructura y piensan que el último estado
convergente proporciona la información deseada. Esta suposición es totalmente incorrecta;
en problemas complejos de análisis estructural, las razones de falla del proceso de
incremento- iteración se puede deber a una mala decisión cuando se escoge la técnica
numérica de solución, lo que propicia una mala estimación de la carga real de colapso de la
estructura. Por ello, es recomendable y sano utilizar técnicas numéricas que permitan seguir
la trayectoria de equilibrio después de producirse los desplazamientos en el punto límite
máximo y, en algunos casos, este esfuerzo adicional permite obtener resultados valiosos y
coherentes a la condición física advertida. Por ejemplo, se puede evaluar la ductilidad en
estructuras afín al daño que presentan.
A diferencia del control de fuerzas, el control directo de desplazamientos considera
desplazamientos prescritos, quedando como incógnitas las reacciones en los puntos de
aplicación de éstos. En los experimentos numéricos cuasi-estáticos donde se utilizan el
control directo de desplazamientos, se puede obtener la capacidad máxima de carga que
soporta una estructura. Para aprovechar este tipo de control, es necesario discriminar los
grados de libertad relacionados a los de desplazamientos prescritos o controlados y los
grados de libertad relativos a los desplazamientos sin control o nudos con libertad de
movimiento del vector de desplazamientos globales (Roeder, 2004). Esta discriminación de
los grados de libertad también se aplica al vector de fuerzas de desequilibro ( )1n+uΨ .

54
(a) Control directo de fuerzas (b) Control directo de desplazamientos
Figura B.2 Comparación entre: (a)control por fuerzas y (b)control directo de
desplazamientos
, ,l int,l ext,lint ext
p int,p ext,p
= =
u f fu = f f
u f f (B.4)
Los subíndices p y l se refieren respectivamente a los grados de libertad para los
desplazamientos prescritos y libres o sin control. Reconfigurando la matriz de rigidez
global de la estructura de acuerdo a los grados de libertad definidos anteriormente, se tiene
el siguiente sistema de ecuaciones:
ll lp l l
pl pp p p
δδ
=
K K uK K u
ΨΨ
(B.5)
Con la primera línea de ecuaciones se pueden obtener los desplazamientos en los nudos
libres en función de los desplazamientos prescritos con la siguiente expresión:
( ) ( )1
l ll l lp pδ δ−
= −u K K uΨ (B.6)
El desarrollo numérico de este procedimiento se presenta en el cuadro algorítmico B.2. De
este cuadro es importante indicar que en la primera iteración se tiene que
( )1, 1 , 1 ,p n p n p nδ + += −u u u y en el resto de iteraciones ( )
, 1k
p nδ + =u 0 . Esto implica que se utilice la
u
f
u
f

55
expresión lp pδ−K u sólo en la primera predicción, lo que mejora de manera significativa la
convergencia del proceso de iteración (Jirázek y Bazant, 2002).
Cuadro Algorítmico B.2 Procedimiento general de solución: control directo de
desplazamientos.
1. Inicio del paso de solución
( ) ( ) ( )0 0 0, 1 , , 1,l n l n p n p,n n+ += = =u u u u 0, Ψ
2. Ecuaciones no- lineales
( ) ( ) ( )1
1 1 1
k k kll lp l l
pl pp p pn n n
δδ
+
+ + +
=
K K u
K K u
ΨΨ
3. Solución para los nudos sin desplazamientos prescritos
( ) ( )( ) ( ) ( )( )11 1( ), 1 , 1 , 1 , 1 , 1k k k kk
l n l l n l n lp n p nδ δ−+ +
+ + + + += −u K K uΨ
4. Corrección de la fase de iteración:
( ) ( ) ( ) ( ) ( ) ( ) ( )1
1 1 11 1 , 1 , 1 , 1 , 1 , 1
1
,k
k k k k k k il,n+ l,n+ l n + l n + l n + l n l n
i
δ δ+
+ + ++ +
=
= + = + ∆ ∆ = ∑u u u u u u u
B.3 Control con procedimientos de arco.
El control directo de desplazamientos se puede utilizar en situaciones tales como la
aplicación de una carga en un solo punto de la estructura o cuando se aplica una carga sobre
una placa rígida, de tal manera que se desplacen simultáneamente todos los puntos de la
estructura que se encuentran en contacto con la placa (Crisfield, 1991b; Jirásek y Bazant,

56
2002). En estructuras con materiales cuyas características sean cuasi-frágiles es posible que
este tipo de control fracase durante el análisis no- lineal, debido a que se puede producir un
cambio repentino de signo de la matriz jacobiana tangente1(ver fig. B.4).
Figura B.3 (a) Trayectoria de equilibrio en estructuras cercanamente
frágiles, (b) control de fuerzas, (c) control directo de desplazamientos, (d)
control de arco.
La idea básica de utilizar técnicas flexibles de control para el incremento de cargas es
introducir un factor, que multiplica a un vector de fuerzas que se toma como referencia, al
sistema de ecuaciones que involucran los desplazamientos incógnitas interceptando la
1 Este tipo de comportamiento se le denomina en inglés snapback .
(a) (b)
(c) (d)
Punto límite Punto de retorno
f f
u u
f f
u u
l∆

57
trayectoria de equilibrio con una hiper-superficie (ver Fig. B.4) cuyo radio de curvatura se
calcula a partir del vector de desplazamientos y el factor multiplicador de la carga.
Figura B.4 Diagrama de respuesta con hiper-superficies de restricción:
sistemas de dos grado de libertad
La técnica de trazar un arco, como se observa en la fig. B.5 para el caso de un sistema de
un grado de libertad (Crisfield, 1991a, 1991b), puede aparentar cierta simplicidad de
empleo; pero no se debe ignorar que el incremento del radio del arco se define a partir de
dos variables de características físicas diferentes como son los desplazamientos y el
parámetro adimensional que multiplica al vector de fuerzas (ver ec. B.7).
( ) ( )2Tl θ λ∆ = ∆ ∆ + ⋅ ∆u u (B.7)
El factor de escala ∆λ establece la contribución de las cargas y θ es un parámetro de
conversión, necesario cuando se combinan los desplazamientos con un parámetro
adimensional. Para ser consistente con la presentación de los procedimientos de arco, se
define la siguiente ecuación para la variación de las fuerzas externas:
( ) 0ext λ λ=f f + f (B.8)
Ψ = 0

58
donde 0f es un vector constante y λf es la componente variable de la fuerza externa2. Es
necesario adicionar, durante el proceso de solución, un radio de arco prescrito l l∆ = ∆ . El
desarrollo del análisis se puede apreciar en el cuadro algorítmico 3.
Figura B.5 Esquema del proceso de restricción con arco: sistema de un
grado de libertad
La elección de la raíz se hace según la dirección en que van evolucionando los incrementos
de los desplazamientos en la trayectoria de equilibrio; es decir, si se cumple la siguiente
condición: ( )( ) ( )( )11 1 0
Tk kn nδ +
+ +∆ >u u .
2 La fuerza f0 puede representar efectos de gravedad y f efectos de carga dinámica.
λ
u
λ0
∆λ1 ∆λ2 ∆λ3
u0 ∆u1
∆u2
∆u3
l∆

59
Cuadro Algorítmico B.3 Procedimiento general de solución: control con restricción
de arco.
1. Inicio del paso de solución
( ) ( ) ( ) ( )0 0+1 1, , - ,n n n n n ext n int nλ λ λ+= = = =Ψu u f f u 0
2. Ecuaciones lineales en la i-ésima iteración:
( ) ( ) ( ) ( )( ) ( )1 11 0 1 1 1
k k k k kT n n int n nδ λ δλ+ +
+ + + += + +K u f f - f u f
3. Solución de sistemas de ecuaciones separados y corrección de
desplazamientos
( ) ( ) ( ) ( )( )( ) ( )
( ) ( ) ( ) ( )
11 0 1 1
11
1 1 1 11 1 1 1
k k k kT n n int n
k kT n
k k k kn n n n
δ λ
δ
δ δ δλ δ
++ + +
++
+ + + ++ + + +
= +
= +
K u f f - f u
K u = f
u u u
%
%
4. Solución de ecuación cuadrática debido a la restricción del radio
del arco con ( )11
knδλ +
+ como incógnita
( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( )2 21 1 121 1 1 1 1 1 0
Tk k k k k kn n n n n n lδ δ θ λ δλ+ + +
+ + + + + +∆ + ∆ + + ∆ + − ∆ =u u u u
5. Actualización de los valores del factor multiplicador de cargas y
de los desplazamientos
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
1 11 1 1
11 1 1 1
1 1 1 1 1 11
,
k k kn n n
kk k k k k k i
n n n n n n ni
λ λ δλ
δ δ
+ ++ + +
++ + + +
+ + + + + +=
∆ = ∆ +
= + = + ∆ ∆ = ∑u u u u u u u

60
Como una alternativa a la ecuación cuadrática que se presenta en el cuadro algorítmico 3,
muchos investigadores han propuesto utilizar una ecuación lineal. Retomando la ec. (B.7)
con una longitud de radio de arco prescrita l∆ se tiene la siguiente ecuación:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( )
2 21 1 1 121 1 1 1 1 1 1
1 1 121 1 1 1 1 1
0
2 2 0
Tk k k k k k kn n n n n n n
Tk k k k k kn n n n n n
a l
a a
δ δ θ λ δλ
δ θ λ δλ
+ + + ++ + + + + + +
+ + ++ + + + + +
= ∆ + ∆ + + ∆ + − ∆ =
= + ∆ + ∆ =
u u u u
u u (B.9)
Si se supone que ( )11
kna +
+ es igual a cero. Entonces con ( ) ( ) ( ) ( )1 1 1 11 1 1 1
k k k kn n n nδ δ δλ δ+ + + +
+ + + += +u u u% en la
ec. (B.9) se obtiene lo siguiente:
( )
( )( )( ) ( )
( )( ) ( ) ( )( )
111 1
11
1 21 1 1
2
k Tk knn n
kn Tk k k
n n n
aδ
δλδ θ λ
+++ +
++
++ + +
− − ∆=
∆ + ∆
u u
u u
% (B.10)
Dependiendo del valor de ( )1
kna + el vector de variación iterativa ( ) ( )1 1
1
Tk k+n n+1δ θδλ+
+ u es
ortogonal al vector de incremento secante ( ) ( )1
Tk kn n+1θ λ+
∆ ∆ u (Ramm, 1981, 1982; Crisfield,
1991a, 1991b).
Las versiones lineales para obtener ( )11
knδλ +
+ son más prácticas y evitan el empleo de un
algoritmo de decisión para determinar el valor correcto de la raíz a partir de la ecuación de
segundo grado; pero la versión esférica general presentada en el algoritmo 3 es más estable
para seguir la trayectoria de equilibrio.
Los procedimientos de arco per se son adecuados si la estructura presenta una distribución
de daño uniforme; pero, cuando la distribución de daño es localizado, estos procedimientos
pierden su eficacia. Para estos casos es recomendable emplear el control indirecto de
desplazamientos. Para aplicar este tipo de control se deben tomar en cuenta unas cuantas
componentes de desplazamientos que particularizan el problema. Para definir este tipo de

61
control, se debe recordar que en estructuras muy frágiles el control directo de
desplazamientos conduce al colapso del análisis. Un aspecto importante, que debe tomarse
en cuenta en el deterioro de los materiales, es ser objetivos con el daño observado y
aprovechar la evolución de los desplazamientos en la abertura de una grieta, o
discontinuidad fuerte, como una alternativa de control al ir aplicando fuerzas, registrando la
evolución de los desplazamientos en la grieta como la que ocurre en el modelo
experimental. Esto último, permite obtener un proceso estable de solución aun cuando
ocurran cambios súbitos de signo en el determinante de la matriz jacobiana que se obtiene
de las ecuaciones no- lineales definidas por las fuerzas internas. Este tipo de control
utilizado en el análisis no- lineal de estructuras se ha implantado en el programa NLFEM.
Para la implementación en el sistema de elementos finitos antes mencionado, se toma una
combinación lineal de las componentes de desplazamientos que aumentan monótonamente
durante el proceso completo hacia el colapso. Con las componentes individuales de la
combinación se define un vector, Θ , según los grados de libertad donde se prescriben los
desplazamientos en las grietas y se proyecta el vector de incremento de los desplazamientos
globales ∆u sobre éste. Con esta idea en mente, se puede formular la ecuación de
restricción como: T l∆ = ∆uΘ (B.11)
En la ec. (B.11) se incorporan indirectamente los desplazamientos prescritos, ajustando el
parámetro de fuerzas para reproducir los desplazamientos deseados. Esta técnica se le
denomina control indirecto de desplazamientos. Para evitar utilizar la ecuación cuadrática
que se presenta en el cuadro algorítmico B.3, es recomendable utilizar la ecuación lineal en
función de ( )11
knδλ +
+ en este tipo de control (ver ec. B.12).
( ) ( )( ) ( )11 1 0k kT
n n lδ ++ +∆ + − ∆ =u uΘ (B.12)
Si se utiliza ( ) ( ) ( ) ( )1 1 1 11 1 1 1
k k k kn n n nδ δ δλ δ+ + + +
+ + + += +u u u% se obtiene el incremento del factor que
multiplica el vector de fuerzas:

62
( )( ) ( )
( )
11 1 1
1 11
k kT Tk n n
n kTn
l δδλ
δ
++ + +
+ ++
∆ − ∆ −=
u uu
%Θ ΘΘ
(B.13)
En situaciones particulares se puede utilizar un vector Θ con una sola componente no-nula,
que se puede presentar de la siguiente forma:
0 0 0 0TT
g = ∆Θ … …Θ (B.14)
donde g∆Θ representa el incremento de desplazamientos en la abertura de grieta con el que
se controla el análisis en el grado de libertad activo g. Esto facilita el cálculo de la variación
iterativa del parámetro multiplicador de la carga, dado que solo participan en la ec. (B.14)
las componentes de los incrementos y variaciones iterativas de desplazamientos relativas al
grado de libertad g.
B.4 Control automático de cargas.
En todo el desarrollo anterior se ha supuesto que los incrementos de carga son los
adecuados, de tal manera que la presentación de los métodos se ha concentrado en el
desarrollo del proceso de solución sobreentendiendo que los incrementos tiene valores
constantes. El tamaño del incremento de desplazamientos, o de fuerzas, está limitado por
las características físicas del problema que, en general, se le asocia a la intensidad con que
se presenta el daño durante el análisis de estructuras. Los criterios empleados en este
trabajo se han basan en el ajuste de las cargas por medio de las iteraciones y se ha utilizado
para el procedimiento con arco, modificando el radio de curvatura del arco en función del
número de iteraciones necesarias en un paso previo y el número de iteraciones deseadas
(ver ec. B.15).
12
11
dn n
n
Il lI−
−
∆ = ∆
(B.15)

63
En la ecuación anterior, Id es el número de iteraciones deseadas en el paso actual y In-1 el
número de iteraciones que fueron necesarias en el incremento anterior (Crisfield, 1991a;
Fusco, 1993).
B.5 Plasticidad computacional.
En esta parte del capítulo se presentan algunos de los aspectos relacionados a la integración
implícita de las ecuaciones de flujo que se derivan a partir de la teoría de la plasticidad.
Para la revisión de la teoría de la plasticidad se mencionarán algunas referencias
importantes a lo largo del siguiente desarrollo.
B.5.1 Esquema de integración implícita de Euler.
A continuación se presenta un algoritmo implícito basado en el procedimiento de
integración de Euler donde las variables internas y las deformaciones plásticas se calculan
al final de la etapa de incremento de deformaciones. También la condición de fluencia se
calcula al final de esta etapa. Las ecuaciones de flujo para representar la no - linealidad en el
material se escriben como (Simo y Hughes, 1998; Belytschko et. al, 2000):
( )( )
1 1
1 1 1
1 1
1 1 1
1 1,
n n n
p pn n n n
n+1 n n n
pn n n
n n n+1f f
γ
γ
+ +
+ + +
+ +
+ + +
+ +
= + ∆
= + ∆
= + ∆
= −
=
r
q q h
C :
q
ε ε ε
ε ε
σ ε ε
σ
(B.16)
El conjunto de ecuaciones no- lineales mostrado en las ecs. (B.16), permite encontrar las
variab les ( )1 1 1, ,pn n+ n+ +qε ε a partir del paso previo donde se cumplen los requisitos de
convergencia. La interpretación geométrica de este esquema se resume en la fig. B.6. El
incremento de deformación plástica está dado por la siguiente expresión:

64
1 1 1 1p p pn n n n nγ+ + + +∆ = = ∆ rε ε ε− (B.17)
Figura B.6 Interpretación geométrica del esquema de proyección de los
esfuerzos sobre la superficie de fluencia.
Sustituyendo la ec. (B.16) en la cuarta ecuación de la ecs. (B.17), donde se define el tensor
de esfuerzos 1nσ + , se obtiene:
1 1 1 1 1 1tr p tr
n+ n n n n nγ+ + + + += ∆ = − ∆C : C : rσ σ ε σ− (B.18)
donde 1 1trn n n+ += + ∆C :σ σ ε es el esfuerzo de prueba o predictor elástico; la expresión
1 1n nγ + +−∆ C : r es el corrector plástico. El corrector plástico proyecta el esfuerzo de prueba
sobre la superficie de fluencia a lo largo de una dirección especificada por el flujo plástico.
El predictor elástico está definido por el incremento de la deformación total y la fase
1prn+σ
nσ
1n+r
∂Ε
Ε

65
correctiva está asociada al incremento del parámetro plástico ∆γn+1. Así, durante la fase de
predicción, los valores de las variables internas y la deformación plástica permanecen fijos,
mientras que en la fase correctiva las deformaciones totales permanecen constantes. La
consecuencia directa de esto se puede apreciar en la ec. (B.19), donde:
1 1 1 1p
n+ n n nγ+ + +∆ = ∆ =−∆C : C : rσ ε− (B.19)
El proceso de solución del conjunto de ecuaciones algebraicas, que establece la fase de
corrección plástica se obtiene con un procedimiento de Newton linealizando
sistemáticamente el conjunto de las ecs. (B.18). En la fase correctora, el tensor de
deformación total es constante y por ello la linealización se hace sobre el incremento del
parámetro plástico ∆γn+1.
Para configurar el proceso algorítmico de solución consistente con el método de Newton, se
introduce la siguiente notación para la linealización de una ecuación g(∆γ) = 0, con
∆γ(0)=0, en la k-ésima iteración se escribe lo siguiente:
( )( )
( ) ( ) ( )1 11,k
k k k kkdgg
dδγ γ γ δγ
γ+ ++
+ ∆ = ∆ + ∆ (B.20)
En esta última expresión, la variable ( )1kδγ + representa el incremento de la variable ∆γ en la
k+1-ésima iteración. Para más claridad en las ecuaciones que a continuación se presentan,
se omite en cada una de ellas el subíndice n+1. Re-escribiendo los términos relacionados a
la fase correctiva plástica y la función de fluencia, en las ecs. (B.18), se tiene lo siguiente:
( )
p pn
n
f = f ,
γ
γ
= − + + ∆ =
+ ∆
a r 0
b = - q q h 0
q
ε ε
σ
+ = (B.21)

66
Utilizando la ec. (B.21) en la forma ( )( ) -1k kp∆ = − ∆C :ε σ se obtienen las siguientes
expresiones para el algoritmo de retorno a la superficie de fluencia.
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
1
0
k k k k k k
k k k k k k
k k k k kf f f
γ δγ
γ δγ
−+ ∆ + ∆ ∆ + =
∆ ∆ ∆
∆ + ⋅ ∆ =q
a C : r r 0
b - q h h 0
: qσ
σ
σ
+ + =
+
(B.22)
Donde
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
k k k k k
k k k k k
∆ = ∆ + ⋅ ∆
∆ = ∆ + ⋅ ∆
q
q
r r : r q
h h : h q
σ
σ
σ
σ (B.23)
Los subíndices σ y q denotan la derivada parcial con respecto a estas variables de las
funciones ∆r y ∆h. Las ecs. (B.23) son un conjunto de tres ecuaciones cuyas incógnitas son
∆σ (k), ∆q(k) y δγ(k). Utilizando las dos primeras ecuaciones en las ecs. (B.22) se tiene lo
siguiente:
( )( )
( )( ) ( ) ( ) 1
kk k k k
kδγ
− ∆ = − − ∆ A a r
q% %σ
(B,24)
La matriz ( ) 1k − A y los vectores ( ) ka% y ( ) kr% tienen las siguientes formas:
( )( )
( ) ( )
( )( )
( )
( )
11
, ,k k k
k k k
k k
γ γγ γ
−− + ∆ ∆ = = = ∆ + ∆
q
q
C r r a rA a r
h h b h% %σ
σ Ι− (B.25)
El cuadro algorítmico 4 resume la aplicación del procedimiento de proyección de los
esfuerzos a la superficie de fluencia.
En el contexto de los elementos finitos este procedimiento implícito de retorno,
representado por la solución local de las ecuaciones no lineales de flujo, se aplica en cada

67
punto de integración de un elemento para mantener la condición de persistencia (Simo y
Hudges, 1998).
Con los esfuerzos sobre la superficie de fluencia se evalúa el módulo tangente algorítmico,
obtenido de la linealización sistemática de las ecuaciones de flujo, para calcular la matriz
de rigidez del elemento empleando un esquema de integración definido para dicho
elemento (Belytschko et. al, 2000). Así, el módulo algorítmico implícito, que es función de
los esfuerzos y de las variables internas, se deriva a partir de la siguiente ecuación:
( )
( )
( ) ( )k
k
d ∆ ⊗ ∂ = ∂∆
%%
σ εA : r f : AA - :
0f : A : rq (B.26)
Cuadro Algorítmico 4B.
Esquema implícito de retorno de Euler
1. Inicialización de variables
( ) ( ) ( ) ( ) ( )( )0 00 0 01: 0 : , , 0,p p p
n n nk γ += = = ∆ = = −q q C :ε ε σ ε ε
2. Checar condición de fluencia en la k-ésima iteración:
( ) ( ) ( )( ) ( ) ( )
( ), ,
kk k k k
kf f
= =
%σa
q ab
3. Calculo del parámetro plástico iterativo
( )( ) ( ) ( ) ( )
( ) ( ) ( ) k k k k
k
k k k
fδγ
− ∂ = ∂
f A a
f A r
%%
4. Cálculo de los incrementos del tensor de esfuerzos y de los del vector

68
de variables internas
( )
( )( ) ( ) ( ) ( ) ( )
kk k k k k
kδγ
∆ = − − ∆ % %σ
A a A rq
5. Actualización de las deformaciones plásticas y variables
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )( )
1
1
1
1
1
1 11
k k k k
k
kp p p p
k k k
k k k
k k k pn+
γ γ δγ
+
+
−
+
+
+ +
= + ∆ = − ∆
= + ∆
∆ = ∆ +
= + ∆ =
C :
q q q
C:
ε ε ε ε σ
σ σ σ ε − ε
La ec. (B.26) se debe condensar para lograr la forma establecida en la definición de módulo
tangente que se basa en un esquema inverso de Euler, 1
alg
n
dd +
= σε
C . También, es
necesario investigar la simetría de éste módulo algorítmico pues éste influye en el tipo de
resolución de los sistemas de ecuaciones producto del ensamble de las matrices de rigidez
de los elementos.
B.6 Solución numérica del problema dinámico
Para resolver el problema dinámico del bordo oriente de la presa de jales, se integra
numéricamente la siguiente ecuación de la dinámica:
( ) ( ) ( ) ( ),t t t x t⋅ + ⋅ + ⋅ =M x C x K x F&& & (B.27)
En la ec. (B.27) M representa la matriz de masas consistentes, C la matriz de disipación,
relacionada en muchos casos a un amortiguamiento en el medio continuo por la fricción
interna del material al producirse daño. K es la matriz de rigidez tangente de la estructura o
construcción y F es un vector de fuerzas aplicadas en un determinado lapso de tiempo. En

69
el caso del problema dinámico donde se incluyen acciones sísmicas por aceleraciones en el
terreno, el vector e fuerzas se debe reemplazar por ( )g t− ⋅M x . El vector x(t) corresponde a
los desplazamientos de los nodos en el modelo de elementos finitos. El punto y los dos
puntos sobre este vector de desplazamientos corresponden a la primera derivada y segunda
derivada respecto al tiempo y que representan los vectores de velocidad y aceleración en los
nodos del modelo respectivamente.
El procedimiento usual de integración de estas ecuaciones se hace mediante el método de
Newmark. En este método se emplea una expansión con diferencias finitas hacia delante
usando un diferencial de tiempo ∆t; además, se supone que la velocidad y desplazamiento
de nodos tienen las siguientes expresiones:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
1 +1
21 +1
1-
1-
2
n+ n n n
n+ n n n n
t t t t t
t t t t t t t
δ δ
α α
= + ⋅ + ⋅ ⋅ ∆ = + ∆ ⋅ + ⋅ + ⋅ ⋅ ∆
x x x x
x x x x x
& & && &&
& && && (B.28)
Las variables implicadas en esta ecuación son:
• α, δ son parámetros de integración del procedimiento;
• ∆t es la diferencia de tiempo correspondiente a los pasos n+1 y n;
Se debe indicar que para que el procedimiento sea incondicionalmente estable se tiene que
cumplir que:
21 1 1 1; ; 04 2 2 2
α δ δ α δ ≥ ⋅ + ≥ + + >
(B.29)
Este proceso de solución es totalmente implícito. Para la aplicación directa del
procedimiento se debe replantear la ec. (B.27) de la siguiente forma, la cual representa el
equilibrio dinámico en el sólido.

70
( ) ( ) ( ) ( ) ( ), ,x t t t t t t t t x t t∆ + ∆ ⋅ + ∆ + ⋅ + ∆ + ⋅ + ∆ + ∆ =F = M x C x K x -F 0&& & (B.30)
El equilibrio se cumple cuando es la solución exacta. Al emplear un procedimiento
numérico de solución de ecuaciones no- lineales, las iteraciones son necesarias, por lo que
replanteando en una iteración i para encontrar, dentro del mismo intervalo de tiempo, la
respuesta en la iteración i+1, se tiene lo siguiente:
( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
+1
+1
+1
+1
+1 +1
,
, , ,
, ,
,
, ,
i
i i
i i
iT T
i i i i
x t t
x t t x t t t t t t t t x t t
x t t x t t
t t t t x t tt t
x t t x t t t t t t
∆ + ∆ =
∂∆ + ∆ ∆ + ∆ ⋅ + ∆ + ⋅ + ∆ + ⋅ + ∆ + ∆ ∂∆ + ∆ ∆ + ∆ +
∂ + ∆ ∂ + ∆ ∂ + ∆ ⋅ + ⋅ + − ⋅ ∆ + ∆ ∂ ∂ ∂
∆ + ∆ ∆ + ∆ + + ∆ ⋅ ∆ + ∆ =
F 0
F = F + M x C x K x -Fx
F = F
x x FM C K x
x x x
F = F J x 0
&& &
&& &
(B.31)
Esta ecuación define el esquema de solución no-lineal de Newton-Rahpson, corrigiendo los
desplazamientos para el siguiente paso de tiempo.
B.7 El método de los elementos finitos.
El procedimiento de solución basado en el método de los elementos finitos se establece a
partir del tipo de topología que tendrán las representaciones geométricas de las porciones
del continuo que en conjunto componen todo el medio continuo que se está estudiando.
Generalmente se representan estas porciones con entidades geométricas que tienen
configuraciones conocidas en las cuales se pueden fácilmente ubicar las propiedades de los
puntos interiores a los volúmenes de estas figuras en función de las propiedades en los
nudos que definen la geometría. En el caso de modelos planos, los elementos más usuales
son los tr iangulares y los cuadriláteros. Estos elementos pueden ser representados por
nudos en cada vértice y, en casos más elaborados, en los lados de dichas figuras. En el caso

71
de cuadriláteros de cuatro nudos, nudos en cada esquina de la figura, se puede tener la
configuración que se muestra en la Fig. B.28. En esta figura, las coordenadas para cada uno
de los puntos que se encuentra en esta superficie se pueden representar con el siguiente
polinomio:
( )( )
1 2 3 4
1 2 3 4
,
,
x a a a a
y b b b b
ξ η ξ η ξ η
ξ η ξ η ξ η
= + ⋅ + ⋅ + ⋅ ⋅
= + ⋅ + ⋅ + ⋅ ⋅ (B.22)
Los coeficientes ai y bi en la ec. (B.22), se encuentran a partir de las coordenadas de los
nudos que definen el cuadrilátero.
Figura B.7 Representación de una porción del continuo por elementos
cuadriláteros.
Las matrices de rigidez y de masas quedan definidas por la integración de las funciones de
forma en coordenadas locales sobre todo el volumen, o superficie en este caso, del
elemento. Para mayores referencias de las ecuaciones que definen las matrices de rigidez,
de fuerzas y de masas, se puede consultar a Zienkiewics y Taylor (2000) y Bathe (1995).
x
y 1
2
3
4
ξ
1 2
3 4
η

72
B.8 MODELO NUMÉRICO DE ELEMENTOS FINITOS
En esta parte del reporte se presenta el modelo de elementos finitos que se emplea para las
simulaciones de daño en el bordo debido a cargas estática y dinámicas en el bordo oriente
de la presa de jales. En primer lugar se describe los elementos finitos empleados para
definir la geometría y las condiciones de frontera de los apoyos. También se hace una
descripción de la malla de elementos finitos empleada. Además, se hace mención de las
hipótesis de análisis necesarias para el experimento numérico.
B.8.1 Elementos finitos
Para la descripción del continuo que representa la presas de jales incluyendo el estrato
firme donde se sustenta se han considerado modelos planos de deformación con elementos
de ocho nudos (Bathe, 1995).
Las integraciones en este tipo de tecnología, que sirve para definir la matriz de rigidez del
modelo estructural, siguen el esquema de numeración que se presenta en la figura anterior
para cada tipo de elemento. Así, los elementos cuadriláteros son integrados con un esquema
estándar de Gauss de 2x2, mientras que los elementos de interfase utilizan el esquema de
Lobatto, por las características cinemáticas de este tipo de elementos (Roeder, 2004).
B.9 FÓRMULA GENERALIZADA DE WESTERGAARD PARA INCLUIR
EFECTOS HIDRODINÁMICOS POR SISMO
El trabajo clásico de Westergaard trata básicamente de la inclusión de masa , a parte de las
mismas de las estructura, en el problema dinámico para tomar en cuenta el movimiento de
agua durante un evento sísmico. Las primeras suposiciones son las siguientes:
1. La presa se idealiza como si fuese bidimensional, rígida y con la cara vertical aguas
arriba.

73
2. El reservorio se extiende al infinito en la dirección aguas arriba.
3. Los desplazamientos de las partículas de fluido son pequeños.
4. Se ignoran las ondas superficiales.
5. Sólo se toma en cuenta el movimiento horizontal del sismo.
Además, supuso que la distribución de presiones, para un liquido incompresible, era de tipo
parabólico. Así, empleando estas hipótesis Westergaard propuso la siguiente expresión para
calcular la presión hidrodinámica:
( ) ( )7 78 8z w w gP = a ? H H z = ? x H H z⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ −&& (B.32)
donde:
a = es la aceleración de la gravedad.
w? = peso unitario del líquido.
x g = Aceleración horizontal del terreno.
? = Densidad del líquido
H = Profundidad de l reservorio, encima de la base del reservorio.
z = Distancia desde la base de la presa.
zP = Presión hidrodinámica a la altura z de la base de la presa, aplicada
normalmente a la superficie de la pared aguas arriba.
La ec. (B.32 ) explica que la presión dinámica se aplica de manera normal en la cara aguas
arriba de la presa a la altura z encima de la base de la presa debido a una aceleración de la
base, esto es, la aceleración total de la cara de la presa a dicha altura. Esta presión es
equivalente a la fuerza de inercia de un prisma de líquido de sección transversal unitaria y
de longitud ( )( )78
H H z⋅ − , firmemente conectado a la cara de la presa. Este cuerpo de
líquido incorpora masa a la presa, además de la que ya posee la estructura. Para generalizar
el concepto de masa adicional, se hacen las siguientes suposiciones:

74
La presión hidrodinámica ejercida sobre cualquier punto aguas arriba de la presa
se debe a aceleración total normal x tn en ese punto de la cara de la presa, es igual
a la fuerza de inercia que produce el cuerpo prismático de líquidode sección
transversal unitaria con longitud ( )( )78
H H z⋅ − , donde z es la altura de ese
punto encima de la base de la presa que está íntimamente ligado la cara de la presa
ejerciendo una presión normal sin fricción.
De acuerdo a esta definición, las masas adicionales se generaliza para ser aplicable a
cualquier geometría de la cara aguas arriba de la presa.
Al discretizar el cuerpo de la presa en elementos finitos, existe cierto nodo i aguas arriba de
la presa con una presión hidrodinámica de:
i ii
tP = a x
n⋅ && (B.34)
donde:
Pi = Presión hidrodinámica en i.
Ai = es el aporte de masa por efectos hidrodinámicos,

75
APÉNDICE C
1:*NONLIN
/NLFEM/DC/ST30 09:19:14 0.00-CPU 0.00-IO 11.-FA BEGIN
2: OUTPUT PRINT
3: DISPLA TOTAL 4: STRESS TOTAL CAUCHY
5: STRAIN PLASTI 6: END OUTPUT
7:*GRAPHI
8:MODEL
9: SELECT ELEMEN 1-41 /
10:END MODEL 11::
12:LAYOUT
13: CHARAC SI=7
14: MODEL.O LI=--
15: NODES. DATA.DF LI=- 16:END LAYOUT
17:SELECT
18: LOAD 1 /
19:END SELECT
20:OUTPUT NONLIN
21:TEXT "Desplazamiento total"
22:DISPLA TOTAL
23:END OUTPUT
24:LAYOUT
25: MODEL LI=-
26: ELEMEN. DATA.F
27:END LAYOUT
28:SELECT
29: LOAD 1 /
30:END SELECT
31:OUTPUT NONLIN
32:TEXT "Esfuerzos principales"
33:STRESS TOTAL PRINCI CL 1 2 34:END OUTPUT
35:OUTPUT NONLIN
36:TEXT "Deformaciones plásticas principales"
37:STRAIN PLASTI PRINCI CL 1 2
38:END OUTPUT
39:OUTPUT NONLIN
40:TEXT "Localización de inelasticidad" 41:STATUS PLASTI
42:END OUTPUT
43::
44:*END
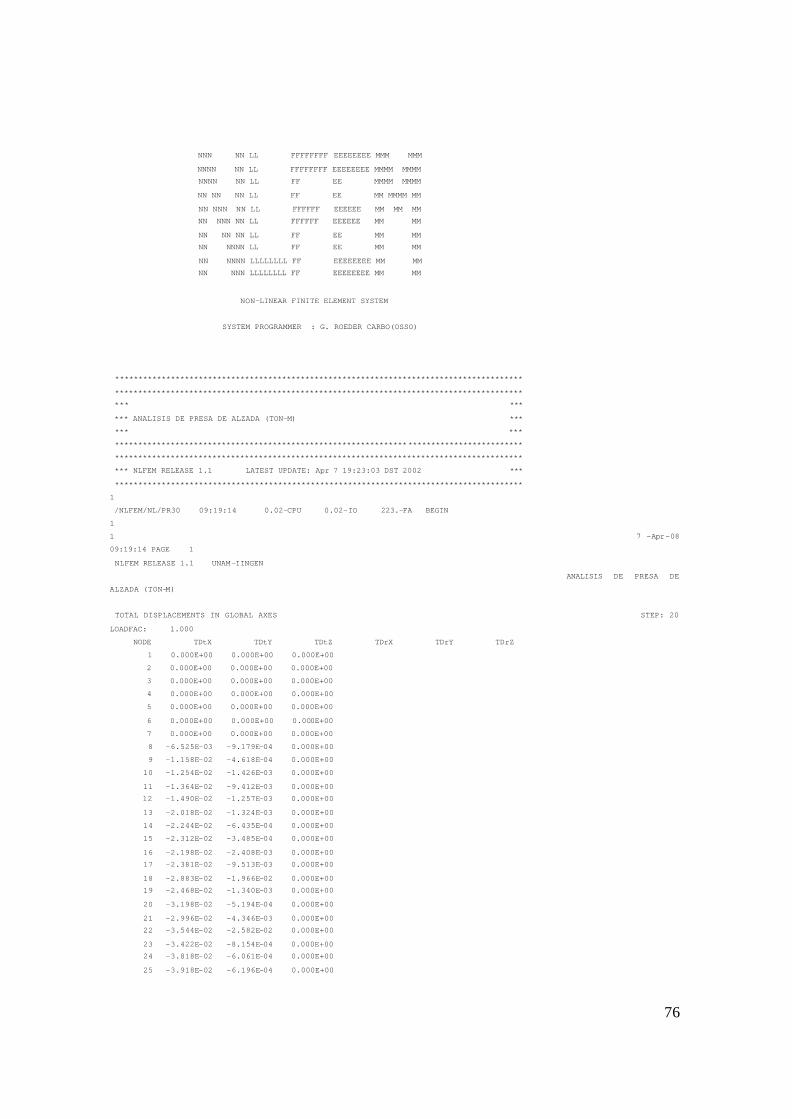
76
NNN NN LL FFFFFFFF EEEEEEEE MMM MMM
NNNN NN LL FFFFFFFF EEEEEEEE MMMM MMMM NNNN NN LL FF EE MMMM MMMM
NN NN NN LL FF EE MM MMMM MM
NN NNN NN LL FFFFFF EEEEEE MM MM MM NN NNN NN LL FFFFFF EEEEEE MM MM
NN NN NN LL FF EE MM MM NN NNNN LL FF EE MM MM
NN NNNN LLLLLLLL FF EEEEEEEE MM MM NN NNN LLLLLLLL FF EEEEEEEE MM MM
NON-LINEAR FINITE ELEMENT SYSTEM
SYSTEM PROGRAMMER : G. ROEDER CARBO(OSSO)
****************************************************************************************
**************************************************************************************** *** ***
*** ANALISIS DE PRESA DE ALZADA (TON-M) ***
*** ***
****************************************************************************************
****************************************************************************************
*** NLFEM RELEASE 1.1 LATEST UPDATE: Apr 7 19:23:03 DST 2002 ***
****************************************************************************************
1
/NLFEM/NL/PR30 09:19:14 0.02-CPU 0.02-IO 223.-FA BEGIN
1
1 7 -Apr-08
09:19:14 PAGE 1
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL DISPLACEMENTS IN GLOBAL AXES STEP: 20
LOADFAC: 1.000
NODE TDtX TDtY TDtZ TDrX TDrY TDrZ
1 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00
5 0.000E+00 0.000E+00 0.000E+00
6 0.000E+00 0.000E+00 0.000E+00
7 0.000E+00 0.000E+00 0.000E+00
8 -6.525E-03 -9.179E-04 0.000E+00
9 -1.158E-02 -4.618E-04 0.000E+00
10 -1.254E-02 -1.426E-03 0.000E+00
11 -1.364E-02 -9.412E-03 0.000E+00 12 -1.490E-02 -1.257E-03 0.000E+00
13 -2.018E-02 -1.324E-03 0.000E+00
14 -2.244E-02 -6.435E-04 0.000E+00
15 -2.312E-02 -3.485E-04 0.000E+00
16 -2.198E-02 -2.408E-03 0.000E+00 17 -2.381E-02 -9.513E-03 0.000E+00
18 -2.883E-02 -1.966E-02 0.000E+00 19 -2.468E-02 -1.340E-03 0.000E+00
20 -3.198E-02 -5.194E-04 0.000E+00
21 -2.996E-02 -4.346E-03 0.000E+00 22 -3.544E-02 -2.582E-02 0.000E+00
23 -3.422E-02 -8.154E-04 0.000E+00 24 -3.818E-02 -6.061E-04 0.000E+00
25 -3.918E-02 -6.196E-04 0.000E+00

77
26 -3.826E-02 -1.922E-03 0.000E+00 27 -3.613E-02 -6.870E-03 0.000E+00
28 -3.573E-02 -1.403E-02 0.000E+00 29 -3.819E-02 -2.974E-02 0.000E+00
30 -4.211E-02 -1.822E-04 0.000E+00
31 -4.395E-02 -1.206E-03 0.000E+00 32 -3.975E-02 -8.734E-03 0.000E+00
33 -4.065E-02 -2.981E-02 0.000E+00 34 -4.696E-02 -6.200E-05 0.000E+00
35 -4.720E-02 -1.041E-03 0.000E+00 36 -4.587E-02 -2.965E-03 0.000E+00
37 -4.370E-02 -6.305E-03 0.000E+00
38 -4.142E-02 -1.084E-02 0.000E+00 39 -4.024E-02 -1.753E-02 0.000E+00
40 -4.150E-02 -2.830E-02 0.000E+00 41 -4.777E-02 -1.604E-03 0.000E+00
42 -4.497E-02 -6.135E-03 0.000E+00
43 -4.123E-02 -1.325E-02 0.000E+00
44 -4.063E-02 -2.602E-02 0.000E+00
45 -4.447E-02 -6.142E-03 0.000E+00 46 -4.317E-02 -8.187E-03 0.000E+00
47 -4.186E-02 -1.039E-02 0.000E+00
48 -4.059E-02 -1.279E-02 0.000E+00
49 -3.961E-02 -1.544E-02 0.000E+00
50 -3.902E-02 -1.868E-02 0.000E+00
51 -3.882E-02 -2.310E-02 0.000E+00
52 0.000E+00 0.000E+00 0.000E+00
53 0.000E+00 0.000E+00 0.000E+00
1 7 -Apr-08
09:19:14 PAGE 2
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL DISPLACEMENTS IN GLOBAL AXES STEP: 20
LOADFAC: 1.000
NODE TDtX TDtY TDtZ TDrX TDrY TDrZ
54 0.000E+00 0.000E+00 0.000E+00
55 0.000E+00 0.000E+00 0.000E+00
56 0.000E+00 0.000E+00 0.000E+00
57 -2.187E-02 -3.491E-02 0.000E+00
58 0.000E+00 0.000E+00 0.000E+00
59 -5.578E-02 -4.871E-02 0.000E+00
60 -3.816E-02 -4.813E-02 0.000E+00
61 -7.988E-02 -7.589E-02 0.000E+00
62 -7.049E-02 -7.877E-02 0.000E+00
63 -4.779E-02 -5.104E-02 0.000E+00
64 -6.260E-02 -7.898E-02 0.000E+00
65 -5.899E-02 -7.420E-02 0.000E+00
66 -4.538E-02 -4.584E-02 0.000E+00 67 -5.347E-02 -6.640E-02 0.000E+00
68 -4.730E-02 -5.637E-02 0.000E+00
69 -3.965E-02 -3.210E-02 0.000E+00
70 -4.158E-02 -4.385E-02 0.000E+00
71 -4.298E-02 -7.807E-03 0.000E+00 72 -4.082E-02 -1.160E-02 0.000E+00
73 -3.907E-02 -1.586E-02 0.000E+00 74 -3.836E-02 -2.198E-02 0.000E+00
75 -4.135E-02 -9.648E-03 0.000E+00
76 -4.058E-02 -1.122E-02 0.000E+00 77 -3.978E-02 -1.279E-02 0.000E+00
78 -3.906E-02 -1.445E-02 0.000E+00 79 -3.848E-02 -1.623E-02 0.000E+00
80 -3.807E-02 -1.833E-02 0.000E+00

78
81 -3.790E-02 -2.089E-02 0.000E+00 82 -4.044E-02 -4.025E-02 0.000E+00
83 -3.814E-02 -2.768E-02 0.000E+00 84 -3.939E-02 -3.669E-02 0.000E+00
85 0.000E+00 0.000E+00 0.000E+00
86 0.000E+00 0.000E+00 0.000E+00 87 -1.439E-03 5.151E-05 0.000E+00
88 -6.361E-03 -1.483E-04 0.000E+00 89 -1.126E-02 -1.012E-03 0.000E+00
90 -1.418E-02 -3.047E-04 0.000E+00 91 -2.355E-02 -3.168E-04 0.000E+00
92 -2.964E-02 -8.731E-04 0.000E+00
93 -3.302E-02 -7.302E-06 0.000E+00 94 -4.092E-02 6.367E-04 0.000E+00
95 -4.482E-02 4.359E-04 0.000E+00 96 -4.550E-02 1.134E-03 0.000E+00
97 -4.585E-02 7.677E-04 0.000E+00
98 -4.615E-02 -1.748E-03 0.000E+00
99 -4.514E-02 4.889E-04 0.000E+00
100 -4.412E-02 -3.775E-05 0.000E+00 101 -4.383E-02 -4.126E-03 0.000E+00
102 -4.234E-02 -1.116E-03 0.000E+00
103 -4.024E-02 -1.000E-02 0.000E+00
104 -4.028E-02 -2.533E-03 0.000E+00
105 -4.031E-02 -6.291E-03 0.000E+00
106 -3.899E-02 -1.027E-02 0.000E+00
1 7 -Apr-08
09:19:14 PAGE 3
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL DISPLACEMENTS IN GLOBAL AXES STEP: 20
LOADFAC: 1.000
NODE TDtX TDtY TDtZ TDrX TDrY TDrZ
107 -3.811E-02 -4.441E-03 0.000E+00
108 -3.761E-02 -1.053E-02 0.000E+00
109 -3.596E-02 -6.673E-03 0.000E+00
110 -3.614E-02 -8.748E-03 0.000E+00
111 -3.603E-02 -1.067E-02 0.000E+00
112 -3.904E-02 -1.290E-02 0.000E+00
113 -3.787E-02 -1.589E-02 0.000E+00
114 -3.723E-02 -1.958E-02 0.000E+00
115 -3.859E-02 -1.162E-02 0.000E+00
116 -3.813E-02 -1.295E-02 0.000E+00
117 -3.767E-02 -1.424E-02 0.000E+00
118 -3.724E-02 -1.554E-02 0.000E+00
119 -3.688E-02 -1.692E-02 0.000E+00
120 -3.661E-02 -1.847E-02 0.000E+00
121 -3.708E-02 -1.290E-02 0.000E+00 122 -3.655E-02 -1.519E-02 0.000E+00
123 -3.609E-02 -1.750E-02 0.000E+00
124 -3.590E-02 -1.173E-02 0.000E+00
125 -3.583E-02 -1.275E-02 0.000E+00
126 -3.579E-02 -1.374E-02 0.000E+00 127 -3.574E-02 -1.472E-02 0.000E+00
128 -3.568E-02 -1.572E-02 0.000E+00 129 -3.560E-02 -1.666E-02 0.000E+00
130 -3.809E-02 -3.208E-02 0.000E+00
131 -3.650E-02 -2.216E-02 0.000E+00 132 -3.696E-02 -2.766E-02 0.000E+00
133 -3.609E-02 -2.356E-02 0.000E+00 134 -3.547E-02 -1.828E-02 0.000E+00
135 -3.554E-02 -2.031E-02 0.000E+00

79
136 -3.446E-02 -8.638E-03 0.000E+00 137 -3.474E-02 -1.162E-02 0.000E+00
138 -3.341E-02 -1.062E-02 0.000E+00 139 -3.362E-02 -1.159E-02 0.000E+00
140 -3.383E-02 -1.244E-02 0.000E+00
141 -3.487E-02 -1.319E-02 0.000E+00 142 -3.500E-02 -1.473E-02 0.000E+00
143 -3.514E-02 -1.632E-02 0.000E+00 144 -3.401E-02 -1.355E-02 0.000E+00
145 -3.411E-02 -1.413E-02 0.000E+00 146 -3.422E-02 -1.470E-02 0.000E+00
147 -3.430E-02 -1.522E-02 0.000E+00
148 -3.437E-02 -1.581E-02 0.000E+00 149 -3.529E-02 -1.861E-02 0.000E+00
150 -3.465E-02 -1.667E-02 0.000E+00 151 -3.482E-02 -1.733E-02 0.000E+00
152 -3.394E-02 -1.300E-02 0.000E+00
1 7 -Apr-08
09:19:14 PAGE 4
NLFEM RELEASE 1.1 UNAM-IINGEN ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL CAUCHY STRESS IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000
ELEMEN IPNT Sxx Syy Szz Sxy Seq
1 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -2.753E-02 5.545E+00 -1.346E+00 7.522E+00 1.449E+01
2 3.509E+00 5.139E+00 -2.241E-01 9.729E+00 1.751E+01
3 -2.819E+00 6.542E+00 -4.099E+00 1.342E+01 2.532E+01
4 5.999E-01 7.693E+00 -2.343E+00 1.193E+01 2.251E+01
2 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -1.126E-01 9.394E+00 -4.041E+00 1.285E+01 2.527E+01
2 1.576E-01 7.781E+00 -3.821E+00 1.345E+01 2.544E+01
3 5.044E+00 2.892E+00 8.381E+00 1.448E+01 2.554E+01
4 -3.131E+00 1.883E+00 -7.636E+00 1.356E+01 2.489E+01
3 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 7.275E-01 -3.992E+00 5.021E+00 1.392E+01 2.534E+01
2 -4.219E+00 -3.387E+00 -9.544E+00 1.456E+01 2.587E+01
3 -5.904E+00 -6.236E+00 -1.040E+01 1.415E+01 2.489E+01
4 -2.398E+00 -8.053E+00 2.865E+00 1.384E+01 2.576E+01
4 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 4.660E+00 5.285E+00 2.735E-01 1.024E+01 1.835E+01
2 6.155E+00 6.079E+00 1.054E+00 9.805E+00 1.772E+01
3 1.524E+00 7.941E+00 -1.754E+00 1.186E+01 2.225E+01
4 2.646E+00 7.222E+00 -1.170E+00 1.083E+01 2.012E+01 5 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 3.084E-01 6.680E+00 -3.557E+00 1.242E+01 2.329E+01
2 -2.510E-01 4.859E+00 -3.659E+00 1.082E+01 2.016E+01
3 -1.245E+00 5.854E-01 -6.871E+00 1.279E+01 2.315E+01 4 -3.491E+00 -1.172E-01 -6.792E+00 1.139E+01 2.056E+01
6 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 -1.438E+00 -3.446E+00 -8.094E+00 1.353E+01 2.417E+01
2 -5.272E+00 -3.967E+00 -8.413E+00 1.122E+01 1.984E+01 3 -4.610E+00 -5.561E+00 -8.397E+00 1.248E+01 2.189E+01
4 -8.650E+00 -4.455E+00 -8.680E+00 1.157E+01 2.049E+01 7 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )

80
1 6.910E+00 6.389E+00 1.444E+00 9.291E+00 1.692E+01 2 7.360E+00 5.487E+00 1.379E+00 9.233E+00 1.685E+01
3 2.942E+00 6.086E+00 -1.135E+00 9.937E+00 1.832E+01 4 3.257E+00 3.767E+00 -1.254E+00 9.388E+00 1.695E+01
8 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 -3.297E-01 3.280E+00 -3.609E+00 1.025E+01 1.872E+01
2 5.657E-01 1.284E+00 -3.194E+00 9.100E+00 1.630E+01 3 -4.346E+00 -1.225E+00 -6.736E+00 1.024E+01 1.838E+01
4 -2.709E+00 -1.695E+00 -5.397E+00 8.699E+00 1.543E+01 9 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -6.272E+00 -2.995E+00 -7.687E+00 9.623E+00 1.718E+01 2 -4.537E+00 -2.685E+00 -6.109E+00 8.271E+00 1.463E+01
3 -8.373E+00 -5.257E+00 -8.131E+00 1.022E+01 1.796E+01 4 -6.747E+00 -3.932E+00 -6.463E+00 8.415E+00 1.482E+01
10 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 7.147E+00 3.838E+00 9.883E-01 8.827E+00 1.619E+01
2 5.558E+00 9.351E-01 -1.247E-01 6.812E+00 1.291E+01 3 3.385E+00 1.852E+00 -1.351E+00 8.360E+00 1.507E+01
4 3.343E+00 -2.238E-01 -1.352E+00 6.432E+00 1.192E+01
1 7 -Apr-08
09:19:14 PAGE 5
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL CAUCHY STRESS IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000
ELEMEN IPNT Sxx Syy Szz Sxy Seq
11 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 1.109E+00 7.467E-02 -2.860E+00 8.179E+00 1.461E+01
11 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
2 1.955E+00 -1.023E+00 -2.048E+00 6.362E+00 1.159E+01
3 -1.234E+00 -1.478E+00 -4.161E+00 7.738E+00 1.369E+01
4 -3.748E-02 -1.615E+00 -2.829E+00 6.051E+00 1.076E+01
12 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -3.203E+00 -2.395E+00 -4.873E+00 7.380E+00 1.297E+01
2 -1.563E+00 -1.471E+00 -3.134E+00 5.717E+00 1.003E+01
3 -5.704E+00 -3.596E+00 -5.511E+00 7.107E+00 1.247E+01
4 -3.351E+00 -2.019E+00 -3.525E+00 5.262E+00 9.225E+00
13 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -3.378E+00 -4.563E+00 -5.382E+00 6.275E+00 1.101E+01
2 -1.294E-01 -3.396E+00 -4.641E+00 7.358E+00 1.337E+01
3 -1.144E+01 -9.073E+00 -9.441E+00 7.148E+00 1.258E+01 4 -1.839E+01 -1.346E+01 -1.378E+01 9.303E+00 1.681E+01
14 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 5.860E-01 -9.413E+00 3.352E+00 1.391E+01 2.675E+01
2 5.956E-01 -6.358E+00 4.271E+00 1.230E+01 2.326E+01 3 -1.402E+01 -7.437E+00 -7.919E+00 1.055E+01 1.935E+01
4 -1.541E+01 -7.854E+00 -8.397E+00 1.236E+01 2.262E+01 15 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -1.561E+01 -7.930E+00 -1.099E+01 1.275E+01 2.308E+01 2 -1.131E+01 -7.108E+00 -8.763E+00 1.220E+01 2.144E+01
3 -1.300E+01 -6.784E+00 -7.113E+00 1.155E+01 2.090E+01 4 -1.221E+01 -6.027E+00 -6.559E+00 9.325E+00 1.721E+01
81
16 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 -9.618E+00 -5.333E+00 -7.507E+00 1.059E+01 1.872E+01 2 -8.541E+00 -5.127E+00 -6.604E+00 8.532E+00 1.507E+01
3 -1.211E+01 -5.681E+00 -6.289E+00 8.518E+00 1.598E+01
4 -1.002E+01 -4.627E+00 -5.241E+00 7.539E+00 1.402E+01 17 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 -7.049E+00 -3.977E+00 -5.407E+00 7.132E+00 1.264E+01
2 -4.773E+00 -2.882E+00 -3.897E+00 5.139E+00 9.052E+00 3 -8.605E+00 -4.159E+00 -4.616E+00 6.566E+00 1.214E+01
4 -6.483E+00 -3.049E+00 -3.544E+00 4.800E+00 8.914E+00
18 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 4.917E+00 3.432E-01 -1.754E-01 5.575E+00 1.081E+01 2 4.127E+00 -9.458E-01 -6.221E-01 4.885E+00 9.787E+00
3 3.067E+00 -1.245E+00 -1.343E+00 5.381E+00 1.029E+01
4 2.996E+00 -1.104E+00 -1.051E+00 4.577E+00 8.914E+00
19 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 2.163E+00 -1.092E+00 -1.556E+00 5.040E+00 9.409E+00
2 1.931E+00 -1.117E+00 -1.414E+00 4.444E+00 8.338E+00
3 3.511E-01 -1.199E+00 -2.113E+00 4.972E+00 8.878E+00
4 6.086E-01 -1.133E+00 -1.763E+00 4.372E+00 7.865E+00
20 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -8.667E-01 -1.295E+00 -2.424E+00 4.833E+00 8.486E+00
2 -2.521E-01 -1.166E+00 -1.950E+00 4.245E+00 7.499E+00
3 -2.238E+00 -1.605E+00 -2.761E+00 4.420E+00 7.722E+00
4 -1.434E+00 -1.255E+00 -2.212E+00 3.854E+00 6.733E+00
1 7 -Apr-08
09:19:14 PAGE 6
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL CAUCHY STRESS IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000
ELEMEN IPNT Sxx Syy Szz Sxy Seq
21 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -3.197E+00 -1.832E+00 -2.834E+00 4.078E+00 7.168E+00
2 -2.405E+00 -1.423E+00 -2.358E+00 3.454E+00 6.060E+00
3 -5.115E+00 -2.439E+00 -2.917E+00 3.784E+00 7.004E+00
4 -4.136E+00 -1.948E+00 -2.448E+00 3.189E+00 5.870E+00
22 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 2.280E+00 1.793E+00 6.720E-01 2.249E+00 4.150E+00
2 8.119E+00 2.953E+00 2.752E+00 5.147E+00 1.036E+01
3 1.184E+00 3.971E+00 -1.870E-01 4.845E+00 9.160E+00 4 5.720E+00 4.061E+00 1.240E+00 7.803E+00 1.407E+01
23 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 1.061E+01 3.202E+00 3.581E+00 6.769E+00 1.377E+01
2 1.196E+01 3.588E+00 4.121E+00 7.247E+00 1.495E+01 3 7.804E+00 4.415E+00 2.006E+00 8.214E+00 1.510E+01
4 8.632E+00 4.539E+00 2.316E+00 8.679E+00 1.602E+01 24 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 1.231E+01 3.756E+00 4.291E+00 7.156E+00 1.492E+01 2 1.327E+01 4.211E+00 4.722E+00 7.723E+00 1.602E+01
3 9.053E+00 5.137E+00 2.628E+00 8.652E+00 1.600E+01 4 1.008E+01 5.497E+00 3.039E+00 8.768E+00 1.640E+01

82
25 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 1.458E+01 4.616E+00 5.232E+00 8.448E+00 1.754E+01 2 1.499E+01 4.296E+00 5.210E+00 8.533E+00 1.800E+01
3 1.036E+01 4.803E+00 2.847E+00 8.957E+00 1.692E+01
4 8.859E+00 2.810E+00 1.909E+00 7.677E+00 1.482E+01 26 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 1.425E+01 3.867E+00 4.859E+00 8.017E+00 1.707E+01
2 1.323E+01 3.380E+00 4.395E+00 7.435E+00 1.593E+01 3 7.167E+00 1.217E+00 9.526E-01 6.258E+00 1.243E+01
4 6.365E+00 7.184E-01 6.640E-01 5.349E+00 1.086E+01
27 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 1.252E+01 3.096E+00 4.128E+00 6.891E+00 1.492E+01 2 1.123E+01 2.645E+00 3.695E+00 5.987E+00 1.316E+01
3 6.010E+00 2.317E-01 5.518E-01 4.677E+00 9.863E+00
4 6.180E+00 5.661E-02 8.469E-01 3.829E+00 8.790E+00
28 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 9.989E+00 2.221E+00 3.262E+00 5.158E+00 1.154E+01
2 7.939E+00 1.695E+00 2.571E+00 3.853E+00 8.878E+00
3 6.122E+00 1.660E-01 1.079E+00 3.306E+00 7.979E+00
4 5.505E+00 -4.224E-02 1.174E+00 2.530E+00 6.686E+00
29 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 4.288E+00 -6.641E-01 -2.471E-01 4.331E+00 8.883E+00
2 4.513E+00 -4.238E-01 1.931E-01 3.489E+00 7.630E+00
3 3.049E+00 -9.889E-01 -8.163E-01 4.069E+00 8.081E+00
4 3.468E+00 -8.602E-01 -3.168E-01 3.322E+00 7.055E+00
30 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 2.169E+00 -1.089E+00 -1.105E+00 3.941E+00 7.567E+00
2 2.831E+00 -9.271E-01 -5.252E-01 3.188E+00 6.578E+00
3 1.095E+00 -1.104E+00 -1.389E+00 3.833E+00 7.045E+00
4 1.911E+00 -8.938E-01 -7.799E-01 3.007E+00 5.890E+00
1 16-Apr-08
09:19:14 PAGE 7
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL CAUCHY STRESS IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000
ELEMEN IPNT Sxx Syy Szz Sxy Seq
31 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 3.209E-01 -1.050E+00 -1.563E+00 3.697E+00 6.621E+00
31 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 2 1.258E+00 -8.827E-01 -9.375E-01 2.862E+00 5.411E+00
3 -6.645E-01 -9.595E-01 -1.734E+00 3.369E+00 5.912E+00
4 3.907E-01 -9.294E-01 -1.141E+00 2.594E+00 4.717E+00
32 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 4.466E+00 -7.376E-01 3.128E-01 2.798E+00 6.798E+00
2 4.496E+00 -1.245E-01 7.455E-01 2.200E+00 5.710E+00 3 3.753E+00 -6.931E-01 7.192E-02 2.765E+00 6.315E+00
4 3.718E+00 -5.061E-01 4.274E-01 2.023E+00 5.201E+00
33 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 3.070E+00 -7.224E-01 -1.803E-01 2.608E+00 5.747E+00 2 3.192E+00 -5.569E-01 2.429E-01 1.826E+00 4.658E+00
3 2.279E+00 -7.846E-01 -4.079E-01 2.399E+00 5.063E+00

83
4 2.620E+00 -4.944E-01 7.942E-02 1.556E+00 3.937E+00 34 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 1.770E+00 -7.458E-01 -5.252E-01 2.252E+00 4.588E+00
2 2.217E+00 -4.969E-01 -2.717E-02 1.400E+00 3.491E+00
3 1.095E+00 -5.853E-01 -6.405E-01 1.976E+00 3.825E+00 4 1.685E+00 -4.283E-01 -1.271E-01 1.192E+00 2.860E+00
35 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 -1.671E+00 -1.136E+00 -1.935E+00 2.943E+00 5.146E+00 2 -4.426E-01 -6.299E-01 -1.228E+00 2.166E+00 3.817E+00
3 -3.263E+00 -1.512E+00 -2.033E+00 2.619E+00 4.797E+00
4 -1.897E+00 -9.277E-01 -1.400E+00 1.698E+00 3.058E+00 36 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 3.506E-01 -5.645E-01 -8.013E-01 1.648E+00 3.042E+00
2 1.169E+00 -2.878E-01 -2.274E-01 9.099E-01 2.127E+00
3 -8.974E-01 -5.212E-01 -9.372E-01 1.070E+00 1.895E+00
4 1.071E-01 -1.924E-01 -4.412E-01 4.261E-01 8.780E-01
37 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 5.582E+00 1.113E+00 1.763E+00 2.810E+00 6.417E+00
2 2.819E+00 3.212E-01 8.379E-01 1.066E+00 2.937E+00
3 4.485E+00 1.196E-02 1.044E+00 1.929E+00 5.256E+00
4 3.213E+00 -1.812E-01 8.372E-01 6.857E-01 3.242E+00
38 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 3.835E+00 -3.455E-01 7.306E-01 1.642E+00 4.714E+00
2 3.289E+00 -4.659E-02 8.616E-01 5.460E-01 3.133E+00
3 3.302E+00 -2.700E-01 5.636E-01 1.434E+00 4.080E+00
4 3.306E+00 -9.041E-03 8.781E-01 4.363E-01 3.067E+00
39 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 3.104E+00 -2.246E-01 5.043E-01 1.257E+00 3.731E+00
2 3.191E+00 -6.458E-02 8.436E-01 3.657E-01 2.978E+00
3 2.638E+00 -2.981E-01 3.399E-01 1.017E+00 3.203E+00
4 2.965E+00 -8.240E-02 7.700E-01 2.700E-01 2.763E+00
40 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 2.299E+00 -2.732E-01 2.570E-01 8.248E-01 2.752E+00
2 2.703E+00 -6.910E-03 7.014E-01 2.094E-01 2.462E+00
3 1.829E+00 -3.027E-01 1.425E-01 6.279E-01 2.231E+00
4 2.232E+00 -7.377E-02 5.148E-01 1.323E-01 2.088E+00
1 7 -Apr-08
09:19:14 PAGE 8
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
TOTAL CAUCHY STRESS IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20 LOADFAC: 1.000
ELEMEN IPNT Sxx Syy Szz Sxy Seq
41 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 1.369E+00 -1.477E-01 5.765E-02 4.602E-01 1.633E+00 2 1.698E+00 -4.532E-02 4.425E-01 2.826E-02 1.558E+00
3 3.659E-01 -6.735E-02 -2.227E-01 1.458E-01 5.856E-01 4 5.670E-01 1.577E-02 5.276E-02 -3.448E-02 5.371E-01
1 7 -Apr-08
09:19:14 PAGE 9 NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE ALZADA (TON-M)

84
PLASTIC STRAIN IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20 LOADFAC: 1.000
ELEMEN IPNT Epxx Epyy Epzz Gpxy Epeq 1 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 -5.803E-05 5.803E-05 5.484E-21 -1.545E-04 3.061E-04 4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 -9.191E-04 9.191E-04 1.998E-20 4.914E-03 3.049E-03
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 -2.566E-03 7.228E-03 -4.314E-03 1.100E-02 1.805E-02
4 -1.038E-03 1.038E-03 -3.577E-19 7.691E-04 1.450E-03 3 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -2.808E-03 7.464E-03 -4.299E-03 1.400E-02 1.945E-02
2 -1.961E-03 1.961E-03 9.227E-19 1.229E-03 2.745E-03
3 -1.919E-03 1.919E-03 1.684E-20 1.580E-02 1.003E-02 4 -1.317E-03 5.733E-03 -3.742E-03 8.383E-03 1.005E-02
4 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
5 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 -1.005E-05 1.005E-05 -1.858E-22 -5.566E-05 3.417E-05
3 -1.678E-03 1.678E-03 -2.888E-19 7.119E-04 1.983E-03
4 -5.153E-04 5.153E-04 2.364E-20 -7.703E-04 1.055E-03
6 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -2.126E-03 2.126E-03 -7.210E-19 1.534E-04 2.457E-03
2 -8.380E-04 8.380E-04 2.564E-20 -4.786E-04 1.295E-03
3 -8.603E-04 8.603E-04 -2.986E-19 6.024E-04 1.053E-03
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
7 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
8 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 4 4.154E-05 -4.154E-05 8.301E-22 -2.903E-07 4.797E-05
9 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 10 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00

85
1 7 -Apr-08 09:19:14 PAGE 10
NLFEM RELEASE 1.1 UNAM-IINGEN ANALISIS DE PRESA DE
ALZADA (TON-M)
PLASTIC STRAIN IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000 ELEMEN IPNT Epxx Epyy Epzz Gpxy Epeq
11 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
11 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
12 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
13 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 3.692E-05 -3.692E-05 1.514E-20 1.578E-05 4.359E-05
14 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -1.297E-03 5.156E-03 -3.261E-03 1.151E-02 8.960E-03
2 -3.124E-03 7.930E-03 -2.984E-03 7.179E-03 8.458E-03
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
15 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 -1.374E-05 1.374E-05 -3.921E-21 8.716E-06 1.664E-05
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
16 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
17 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
18 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
19 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00

86
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 20 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
1 7 -Apr-08 09:19:14 PAGE 11
NLFEM RELEASE 1.1 UNAM-IINGEN ANALISIS DE PRESA DE
ALZADA (TON-M)
PLASTIC STRAIN IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000 ELEMEN IPNT Epxx Epyy Epzz Gpxy Epeq
21 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
22 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
23 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
24 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
25 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
26 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
27 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
28 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00

87
29 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 30 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
1 7 -Apr-08 09:19:14 PAGE 12
NLFEM RELEASE 1.1 UNAM-IINGEN ANALISIS DE PRESA DE
ALZADA (TON-M)
PLASTIC STRAIN IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000 ELEMEN IPNT Epxx Epyy Epzz Gpxy Epeq
31 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
31 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
32 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
33 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
34 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
35 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
36 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
37 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00

88
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 38 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
39 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00 0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00 40 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 ) 1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
1 7 -Apr-08 09:19:14 PAGE 13
NLFEM RELEASE 1.1 UNAM-IINGEN
ANALISIS DE PRESA DE
ALZADA (TON-M)
PLASTIC STRAIN IN LOCAL AXES FOR ELEMENT TYPE CQ16E STEP: 20
LOADFAC: 1.000
ELEMEN IPNT Epxx Epyy Epzz Gpxy Epeq
41 AXES ( 1.00 0.00 0.00 / 0.00 1.00 0.00 / 0.00
0.00 1.00 )
1 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
2 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
3 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
4 0.000E+00 0.000E+00 0.000E+00 0.000E+00 0.000E+00
/NLFEM/GR/EP30 09:19:14 0.03-CPU 0.03-IO 283.-FA BEGIN
PICT.COORD. STORED...... NN= 152
LINES AND FACES STORED.. HE= 41 NL= 96 NF= 41 CL= 0 CF= 3
/NLFEM/GR/DA30 09:19:14 0.03-CPU 0.03-IO 329.-FA BEGIN
GR.NODAL.DATA EVALUATED. HN= 152 HV= 0.11018E+00 LV= 0.00000E+00
/NLFEM/GR/PL30 09:19:14 0.04-CPU 0.03-IO 385.-FA BEGIN
ZOOM : 0.000E+00 0.000E+00 0.000E+00
BOX : 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18
PLOT FILE NAME.......... nlfem064.ps
FRAME PICTURE DRAWN.....
MODEL DRAWN............. NL= 96 NN= 152
NODAL DATA DRAWN........ HN= 152 FA= 0.47150E+02 SC= 0.10000E+01
/NLFEM/GR/DA30 09:19:14 0.09-CPU 0.05-IO 438.-FA BEGIN
GR.ELEM.DATA EVALUATED.. HE= 41 HV= 0.19714E+02 LV=-0.25545E+02
/NLFEM/GR/PL30 09:19:14 0.09-CPU 0.06-IO 490.-FA BEGIN
ZOOM : 0.000E+00 0.000E+00 0.000E+00 BOX : 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18
PLOT FILE NAME.......... nlfem065.ps
FRAME PICTURE DRAWN.....
MODEL DRAWN............. NL= 96 NN= 152
ELEMENT DATA DRAWN...... HE= 41 SC= 0.10000E+00 /NLFEM/GR/DA30 09:19:15 0.15-CPU 0.08-IO 543.-FA BEGIN
GR.ELEM.DATA EVALUATED.. HE= 41 HV= 0.79299E-02 LV=-0.31245E-02 /NLFEM/GR/PL30 09:19:15 0.16-CPU 0.08-IO 593.-FA BEGIN
ZOOM : 0.000E+00 0.000E+00 0.000E+00
BOX : 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 PLOT FILE NAME.......... nlfem066.ps
!! GTX [101] Invalid code in string FRAME PICTURE DRAWN.....
MODEL DRAWN............. NL= 96 NN= 152
89
ELEMENT DATA DRAWN...... HE= 41 SC= 0.10000E+04 /NLFEM/GR/DA30 09:19:15 0.20-CPU 0.11-IO 646.-FA BEGIN
GR.ELEM.DATA EVALUATED.. HE= 41 HV= 0.19453E-01 LV= 0.00000E+00 /NLFEM/GR/PL30 09:19:15 0.21-CPU 0.12-IO 697.-FA BEGIN
ZOOM : 0.000E+00 0.000E+00 0.000E+00
BOX : 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 1.000E+18 -1.000E+18 PLOT FILE NAME.......... nlfem067.ps
!! GTX [101] Invalid code in string FRAME PICTURE DRAWN.....
MODEL DRAWN............. NL= 96 NN= 152 ELEMENT DATA DRAWN...... HE= 41 SC= 0.10000E+03
/NLFEM/DC/END 09:19:15 0.24-CPU 0.13-IO 725.-FA STOP