análisis de sistemas en el dominio del tiempo -...
TRANSCRIPT
Tema 3
ANÁLISIS DINÁMICO DE SISTEMAS
Tema 3
Análisis de Sistemas en el Dominio del Tiempo
Gijón - Febrero 2005 1
Indice
• 4.1. Análisis de los sistemas
ANÁLISIS DINÁMICO DE SISTEMAS
• 4.1. Análisis de los sistemas
• 4.2. Respuesta impulsional
• 4.3. Respuesta a un escalón
• 4.4. Respuesta a una señal cualquiera
• 4.5. Estabilidad
• 4.6. Criterio de estabilidad de Routh
• 4.7. Sistemas de primer orden
• 4.8. Sistemas de segundo orden
Gijón - Febrero 2005 2
• 4.8. Sistemas de segundo orden
• 4.9. Sistemas de orden superior
• 4.10. Retardo puro

Análisis de los Sistemas• Conocido el modelo matemático del sistema se realiza el análisis de su
comportamiento dinámico. Y(s)X(s) G(s)
g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
•Se utilizan señales de excitación sencillas y con transformada de Laplace.
• El análisis se puede realizar en el dominio del tiempo o en el dominio de
x(t) y(t)g(t)
t
δ(t)∞ ↑
t
u0(t)
1
1 t
f(t)
1
1 t
f(t)
1
Gijón - Febrero 2005 3
• El análisis se puede realizar en el dominio del tiempo o en el dominio de la frecuencia. f(t)
M
t
-M
π/ω 2·π/ω
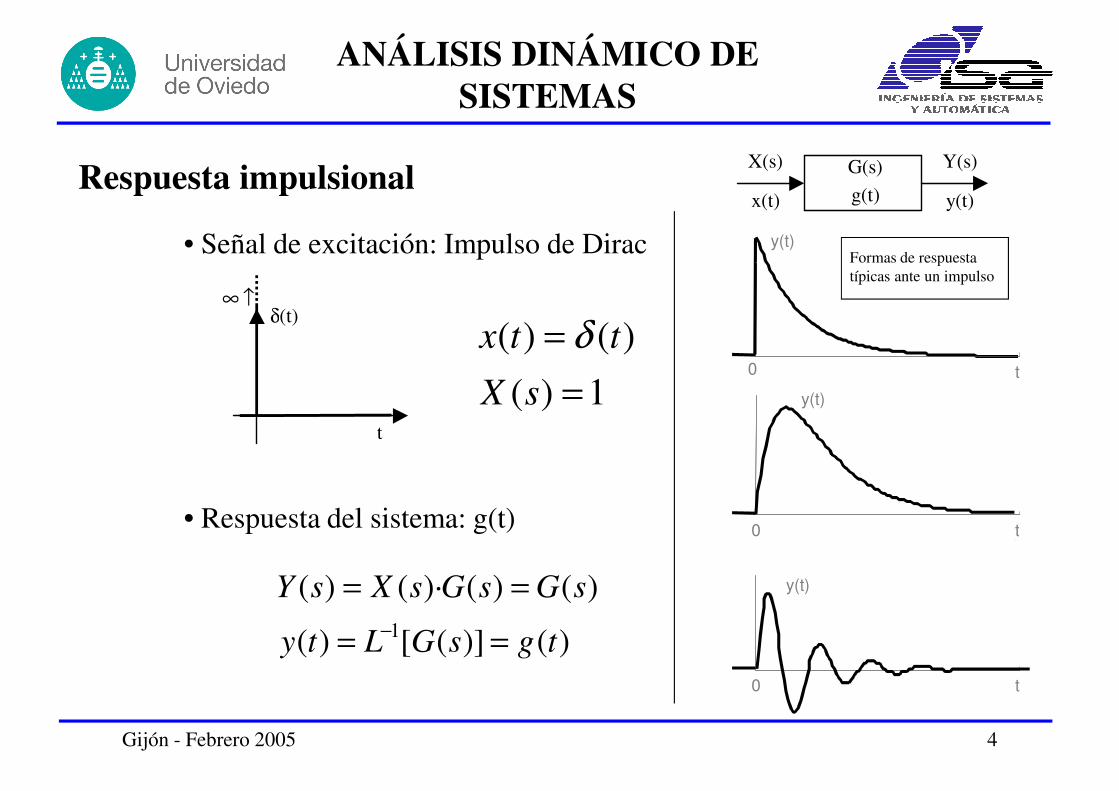
Respuesta impulsional
• Señal de excitación: Impulso de Dirac
Y(s)X(s) G(s)
x(t) y(t)g(t)
y(t)Formas de respuesta
ANÁLISIS DINÁMICO DE SISTEMAS
• Respuesta del sistema: g(t)
t
δ(t)∞ ↑
1)(
)()(
=
=
sX
ttx δt0
0 t
y(t)
Formas de respuesta
típicas ante un impulso
Gijón - Febrero 2005 4
• Respuesta del sistema: g(t)
)()]([)(
)()()·()(
1 tgsGLty
sGsGsXsY
==
==−
0 t
y(t)
0 ty(t)
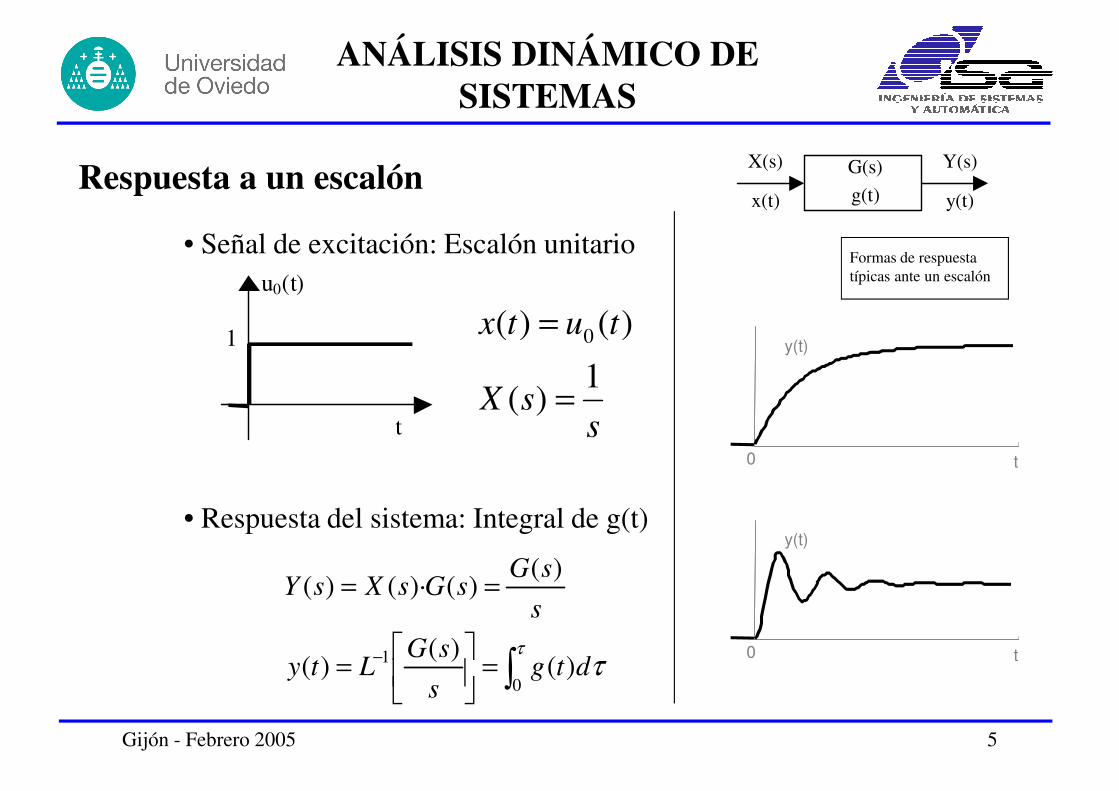
Respuesta a un escalón
• Señal de excitación: Escalón unitario
Y(s)X(s) G(s)
x(t) y(t)g(t)
Formas de respuesta
ANÁLISIS DINÁMICO DE SISTEMAS
• Respuesta del sistema: Integral de g(t)
ssX
tutx
1)(
)()( 0
=
=
t
u0(t)
1
t
y(t)
0
Formas de respuesta
típicas ante un escalón
Gijón - Febrero 2005 5
• Respuesta del sistema: Integral de g(t)
∫=
=
==
− ττ
0
1)(
)()(
)()()·()(
dtgs
sGLty
s
sGsGsXsY
t
y(t)
0
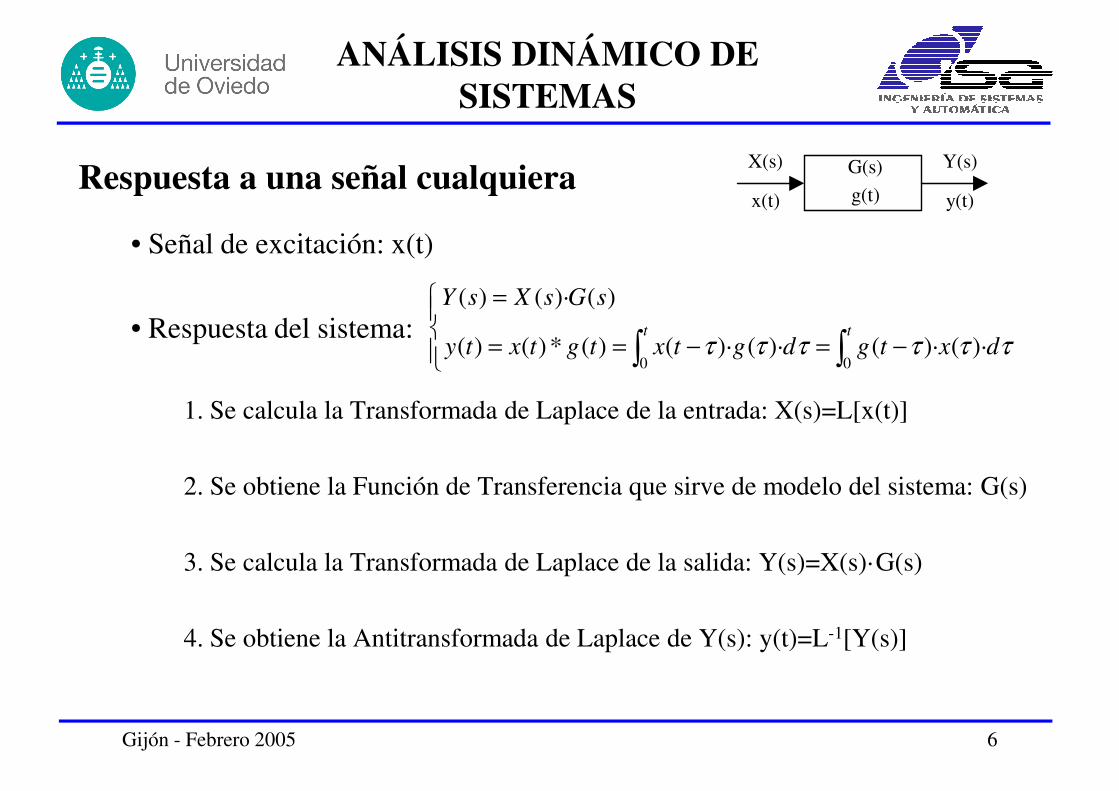
Respuesta a una señal cualquiera
• Señal de excitación: x(t)
Y(s)X(s) G(s)
x(t) y(t)g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
• Respuesta del sistema:
1. Se calcula la Transformada de Laplace de la entrada: X(s)=L[x(t)]
2. Se obtiene la Función de Transferencia que sirve de modelo del sistema: G(s)
−=−==
=
∫∫tt
dxtgdgtxtgtxty
sGsXsY
00)·()·()·()·()(*)()(
)()·()(
ττττττ
Gijón - Febrero 2005 6
3. Se calcula la Transformada de Laplace de la salida: Y(s)=X(s)·G(s)
4. Se obtiene la Antitransformada de Laplace de Y(s): y(t)=L-1[Y(s)]
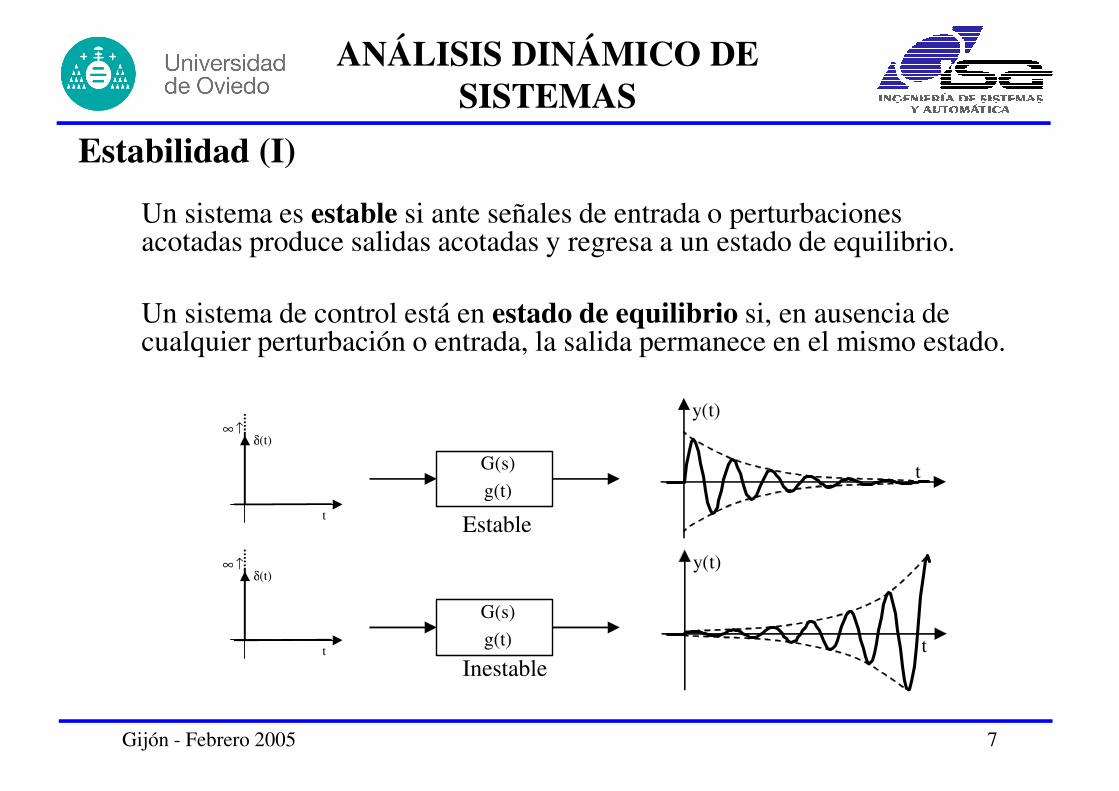
Estabilidad (I)
Un sistema es estable si ante señales de entrada o perturbaciones acotadas produce salidas acotadas y regresa a un estado de equilibrio.
ANÁLISIS DINÁMICO DE SISTEMAS
Un sistema de control está en estado de equilibrio si, en ausencia de cualquier perturbación o entrada, la salida permanece en el mismo estado.
y(t)
t
Estable
G(s)
g(t)
t
δ(t)∞ ↑
Gijón - Febrero 2005 7
y(t)
t
Estable
Inestable
G(s)
g(t) t
δ(t)∞ ↑
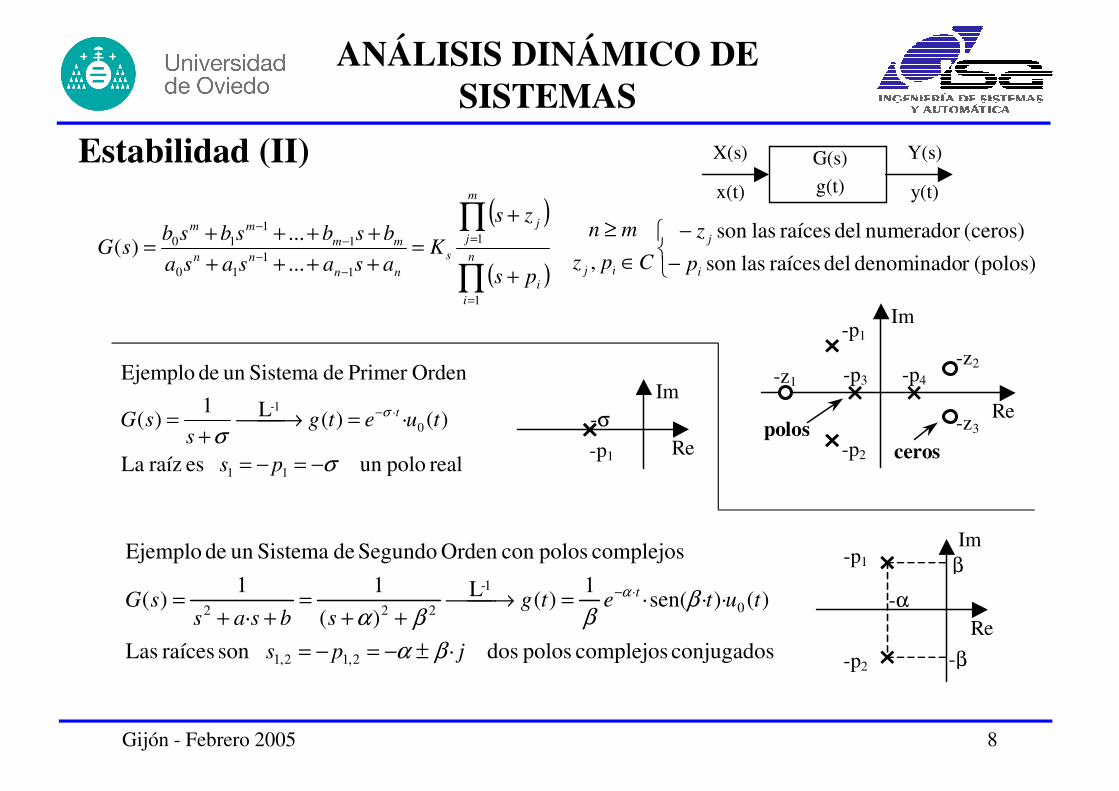
Estabilidad (II)
( )
( )
−
−
∈
≥
+
+
=++++++++
=
∏
∏=
−−
−−
(polos)r denominado del raíces lasson
(ceros)numerador del raíces lasson
,...
...)(
1
1
1
1
10 j
ijn
m
j
j
snn
mm
mm
p
z
Cpz
mn
ps
zs
Kasasasa
bsbsbsbsG
Y(s)X(s) G(s)
x(t) y(t)g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
( ) −∈+
++++ ∏=
−− (polos)r denominado del raíces lasson ,...
1
1
1
10 iij
i
inn
nn pCpzps
asasasa
Re
Im
-σ
-p1real poloun es raíz La
)(·)(L1)(
OrdenPrimer de Sistemaun de Ejemplo
11
0
·1-
σσ
σ
−=−=
=→+
= −
ps
tuetgs
sGt Re
Im
-z1
-p1
-p2
-p3
-z2
-z3
-p4
polosceros
Gijón - Febrero 2005 8
Re
Im
-α
β
-β
-p1
-p2conjugados complejos polos dos·son raíces Las
)()···sen(1
)(L
)(
1
·
1)(
complejos poloscon Orden Segundo de Sistemaun de Ejemplo
2,12,1
0·
1-
222
jps
tutetgsbsas
sGt
βα
βββα
α
±−=−=
=→++
=++
= −
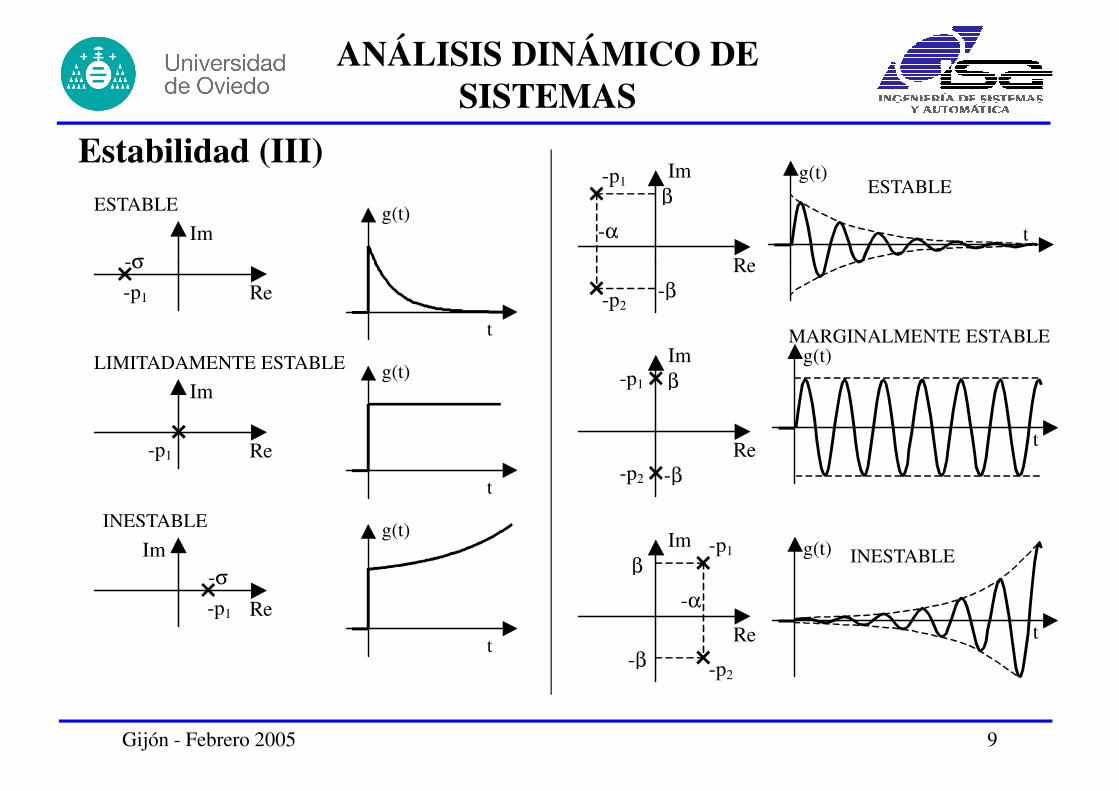
Estabilidad (III)
Im
-σ Re
Im
-α
β-p1
g(t)
g(t)
t
ESTABLEESTABLE
ANÁLISIS DINÁMICO DE SISTEMAS
Re
-σ
-p1
Re
-β-p2
Re
Im
-p1 Re
Im
β
-β
-p1
-p2
t
t
g(t)
g(t)
g(t)
t
INESTABLE
LIMITADAMENTE ESTABLE
MARGINALMENTE ESTABLE
Gijón - Febrero 2005 9
Re
Im
-σ
-p1
Re
Im
-α
β
-β
-p1
-p2
t
g(t)g(t)
t
INESTABLE
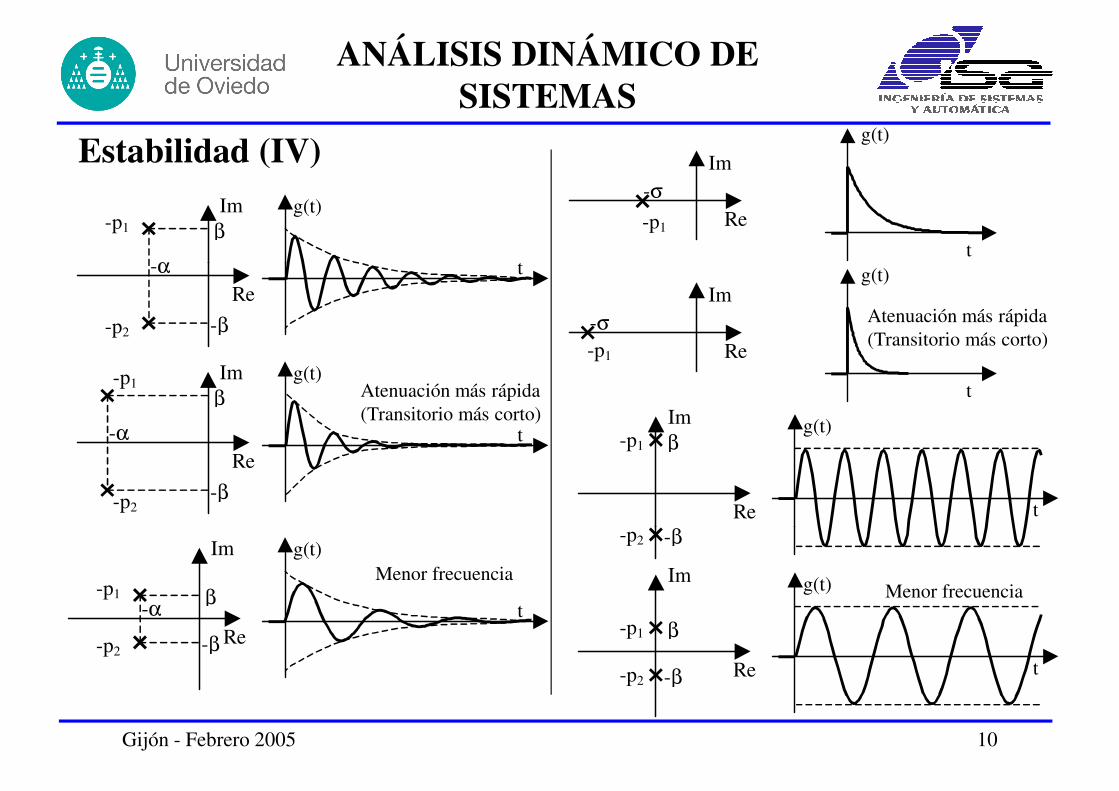
Estabilidad (IV)
Im
-α
β-p1 Re
Im
-σ
-p1
t
g(t)
g(t)
t
ANÁLISIS DINÁMICO DE SISTEMAS
Re
Im
β
-β
-p1
-p
Re
-α
-β-p2
Re
Im
-α
β
-β
-p1
-p2
Re
Im
-σ-p1
t
g(t)
g(t)
t
t
g(t)
t
Atenuación más rápida
(Transitorio más corto)
Atenuación más rápida
(Transitorio más corto)
Gijón - Febrero 2005 10
-β-p2
Re
Im
-α β
-β
-p1
-p2
Re
Im
β
-β
-p1
-p2
g(t)
t
g(t)
t
Menor frecuenciaMenor frecuencia
Estabilidad (V)
• Un sistema es estable si todos sus polos están situados en el semiplano complejo
negativo.
ANÁLISIS DINÁMICO DE SISTEMAS
• Un sistema es inestable si algún polo está situado en el semiplano complejo positivo
o si existen polos múltiples en el eje imaginario o en el origen.
• Un sistema es limitadamente estable si existe un solo polo en el origen, estando los
demás situados en el semiplano negativo.
• Un sistema es marginalmente estable si existe una pareja simple (no múltiples) de
polos complejos conjugados sobre el eje imaginario, estando los restantes polos
situados en el semiplano negativo.
• Los polos situados en el semiplano negativo originan respuestas que se atenúan
Gijón - Febrero 2005 11
• Los polos situados en el semiplano negativo originan respuestas que se atenúan
tanto más rápidamente, cuanto más alejados estén del eje imaginario. Se denominan
en general “polos dominantes” aquellos que están más cerca del mencionado eje.
• Los polos complejos conjugados dan lugar a respuestas cuyas oscilaciones son de
frecuencia tanto más elevada cuanto mayor sea su distancia al eje real.
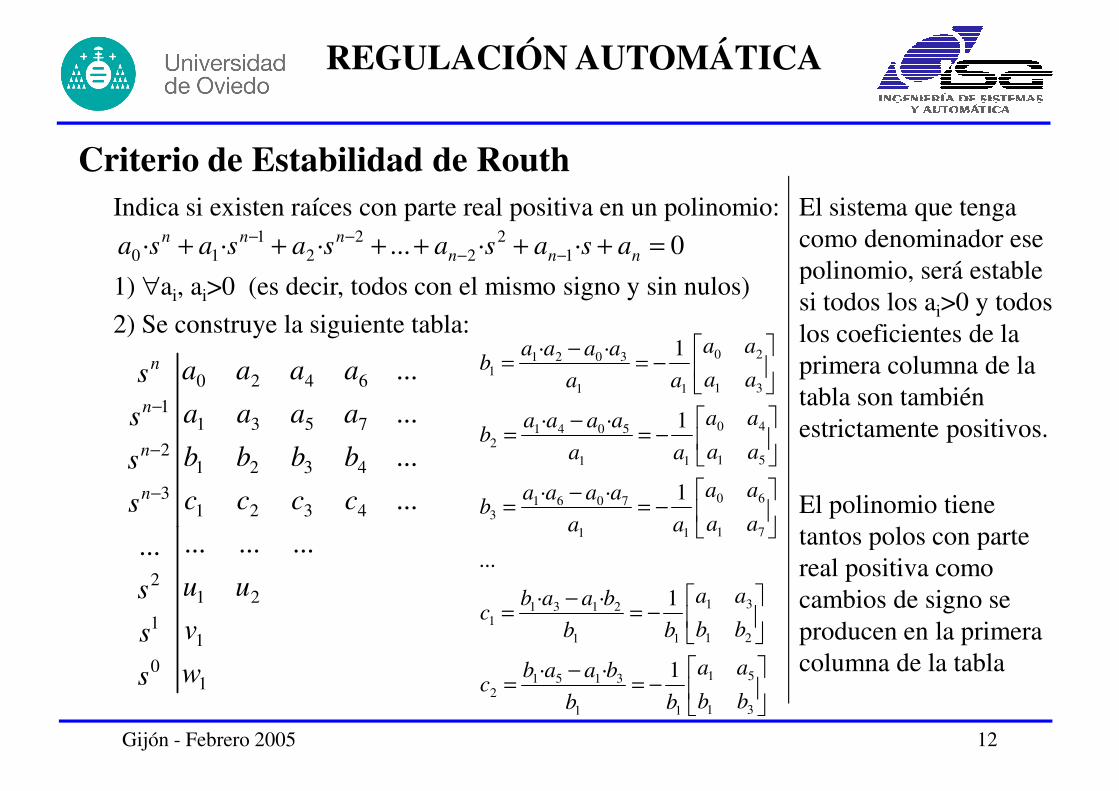
Criterio de Estabilidad de RouthIndica si existen raíces con parte real positiva en un polinomio:
0··...··· 12
22
21
10 =++++++ −−−−
nnn
nnn asasasasasa
El sistema que tenga
como denominador ese
polinomio, será estable
REGULACIÓN AUTOMÁTICA
1) ∀ai, ai>0 (es decir, todos con el mismo signo y sin nulos)
2) Se construye la siguiente tabla:
4321
4321
7531
6420
3
2
1
.........
...
...
...
...
cccc
bbbb
aaaa
aaaa
s
s
s
s
n
n
n
n
−
−
−
12210 −− nnnpolinomio, será estable
si todos los ai>0 y todos
los coeficientes de la
primera columna de la
tabla son también
estrictamente positivos.
El polinomio tiene
tantos polos con parte
−=
−=
−=
−=
−=
−=
71
60
11
70613
51
40
11
50412
31
20
11
30211
1··
1··
1··
aa
aa
aa
aaaab
aa
aa
aa
aaaab
aa
aa
aa
aaaab
Gijón - Febrero 2005 12
1
1
21
0
1
2
............
w
v
uu
s
s
s
tantos polos con parte
real positiva como
cambios de signo se
producen en la primera
columna de la tabla
−=
−=
−=
−=
31
51
11
31512
21
31
11
21311
7111
1··
1··
...
bb
aa
bb
baabc
bb
aa
bb
baabc
aaaa

Sistemas de Primer Orden (I)Y(s)X(s) G(s)
x(t) y(t)g(t)sT
KsG
·1)(
+=
y(t)
0,37·K/T
K/T
K: ganancia estática o en régimen permanente
ANÁLISIS DINÁMICO DE SISTEMAS
• Respuesta impulsional: X(s)=1
)(·)]([)]([)( 0
11tue
T
KsGLsYLty T
t−−− ===
• Respuesta a un escalón: X(s)=1/s
)()·1·()(
)]([)( 0
11 tueKsG
LsYLty T
t−−− −=
==
tT
t
y(t)
T
0,63·K
K
3·T
0,95·K
Tangente en el origen
(pendiente K/T)
y(t) T
K: ganancia estática o en régimen permanente
T: constante de tiempo
Gijón - Febrero 2005 13
)()·1·()]([)( 0 tueKs
LsYLty T−===
• Respuesta a una rampa: X(s)=1/s2
)(]···)·([)(
)]([)( 02
11tueTKTtK
s
sGLsYLty T
t−−− +−=
== tT
-K·T
(pendiente K)
T
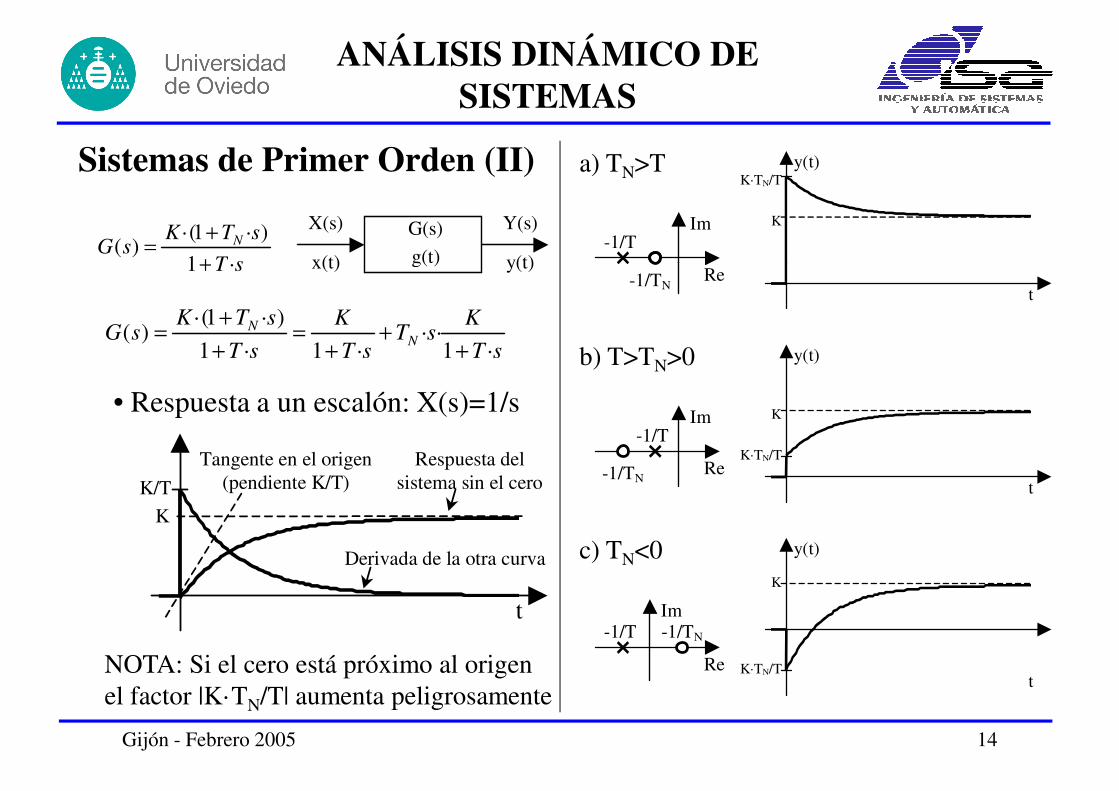
Sistemas de Primer Orden (II)
Y(s)X(s) G(s)
x(t) y(t)g(t)sT
sTKsG N
·1
)·1·()(
+
+=
y(t)
K
K·TN/T
Im-1/T
a) TN>T
ANÁLISIS DINÁMICO DE SISTEMAS
x(t) y(t)g(t)
sT
KsT
sT
K
sT
sTKsG N
N
·1··
·1·1
)·1·()(
++
+=
+
+=
sT ·1+
• Respuesta a un escalón: X(s)=1/s
K
K/T
Tangente en el origen
(pendiente K/T)
Respuesta del
sistema sin el cero
t
t
y(t)
K
K·TN/T
Re-1/TN
Re
Im-1/T
-1/TN
b) T>TN>0
Gijón - Febrero 2005 14
t
Derivada de la otra curva
t
y(t)
K
K·TN/TRe
Im-1/T -1/TN
c) TN<0
NOTA: Si el cero está próximo al origen
el factor |K·TN/T| aumenta peligrosamente
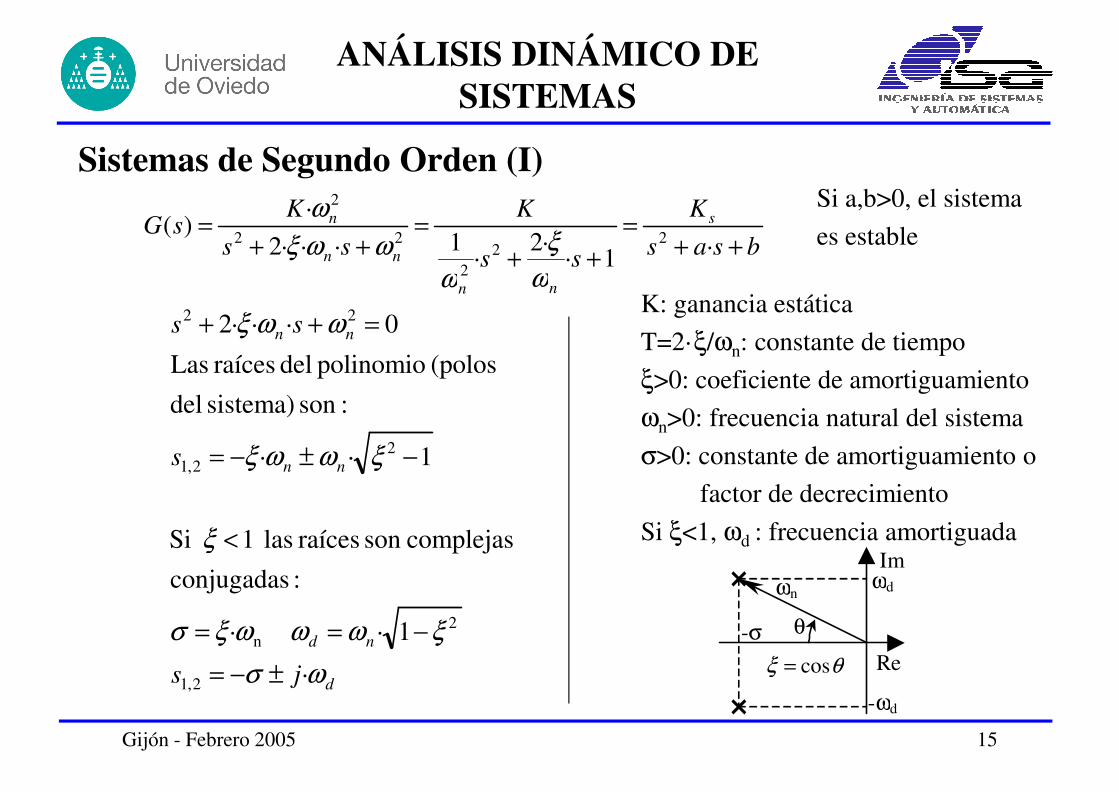
Sistemas de Segundo Orden (I)
bsas
K
ss
K
ss
KsG s
nn
n
++=
++=
++=
·1·
·2·
1···2
·)(
22
2
22
2
ωξ
ωωωξ
ω Si a,b>0, el sistema
es estable
ANÁLISIS DINÁMICO DE SISTEMAS
ssnn
nn ++ 1··2 ωω
K: ganancia estática
T=2·ξ/ωn: constante de tiempo
ξ>0: coeficiente de amortiguamiento
ωn>0: frecuencia natural del sistema
σ>0: constante de amortiguamiento o
factor de decrecimiento
Si ξ<1, ω : frecuencia amortiguada
nn
nn
s
ss
ξ
ξωωξ
ωωξ
complejasson raíces las 1 Si
1··
:son sistema) del
(polos polinomio del raíces Las
0···2
22,1
22
<
−±−=
=++
Gijón - Febrero 2005 15
Si ξ<1, ωd : frecuencia amortiguada
d
nd
js ωσ
ξωωωξσ
ξ
·
1··
:conjugadas
complejasson raíces las 1 Si
2,1
2n
±−=
−==
<
Re
Im
-σ
-ωd
ωdωn
θ
θξ cos=

Sistemas de Segundo Orden (II)
22
2
···2
·)(
nn
n
ss
KsG
ωωξω
++=
Re
Im
ξ<1 ξ=0
ξ>1 ξ>1 ξ=infξ→inf
ξ=1
−±−=
=++
1··
0···2
22,1
22
ξωωξ
ωωξ
nn
nn
s
ss
ANÁLISIS DINÁMICO DE SISTEMAS
nn
a) Si ξ>1: dos raíces reales
b) Si ξ=1: una raíz doble
c) Si 0<ξ<1: dos raíces complejas conjugadas
Re
ξ=0ξ<1ξ=1
−±−= 1··2,1 ξωωξ nns
1· 22,1 −±−= ξωσ ns
ns ωσ −=−=2,1
Re
Im
s1s2
a)
Re
Im
-σ
b)
Gijón - Febrero 2005 16
c) Si 0<ξ<1: dos raíces complejas conjugadas
d) Si ξ=0: dos raíces imaginarias puras
djs ωσ ·2,1 ±−=
nd jjs ωω ··2,1 ±=±=
Re
Im
-σωd
-ωd
c)
Re
Im
ωd
-ωd
d)

Sistemas de Segundo Orden (III): respuesta impulsional
a) Si ξ>1: sistema sobreamortiguado
2· BAK ω ·=−=
ωnK
Y(s)X(s) G(s)
x(t) y(t)g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
b) Si ξ=1: sistema críticamente amortiguado
c) Si 0<ξ<1: sistema subamortiguado
)(····)( 0
·2tuetKty
tnn
ωω −=
2122
2
···2
·)(
ss
B
ss
A
ss
KsG
nn
n
−+
−=
++=
ωωξω
[ ] )(···)( 0
·2·1 tueBeAtytsts +=
1·2
·
2 −=−=
ξ
ωnKBA
x(t) y(t)g(t)
ξ=0y(t)
ξ=0.2
ξ=1
ξ=2
Gijón - Febrero 2005 17
c) Si 0<ξ<1: sistema subamortiguado
d) Si ξ=0: sistema sin amortiguamiento
)(·)···sen(1
·)( 0
·
2tuet
Kty
t
dn σω
ξ
ω −
−=
t
)()···sen(·)( 0 tutKty nn ωω=
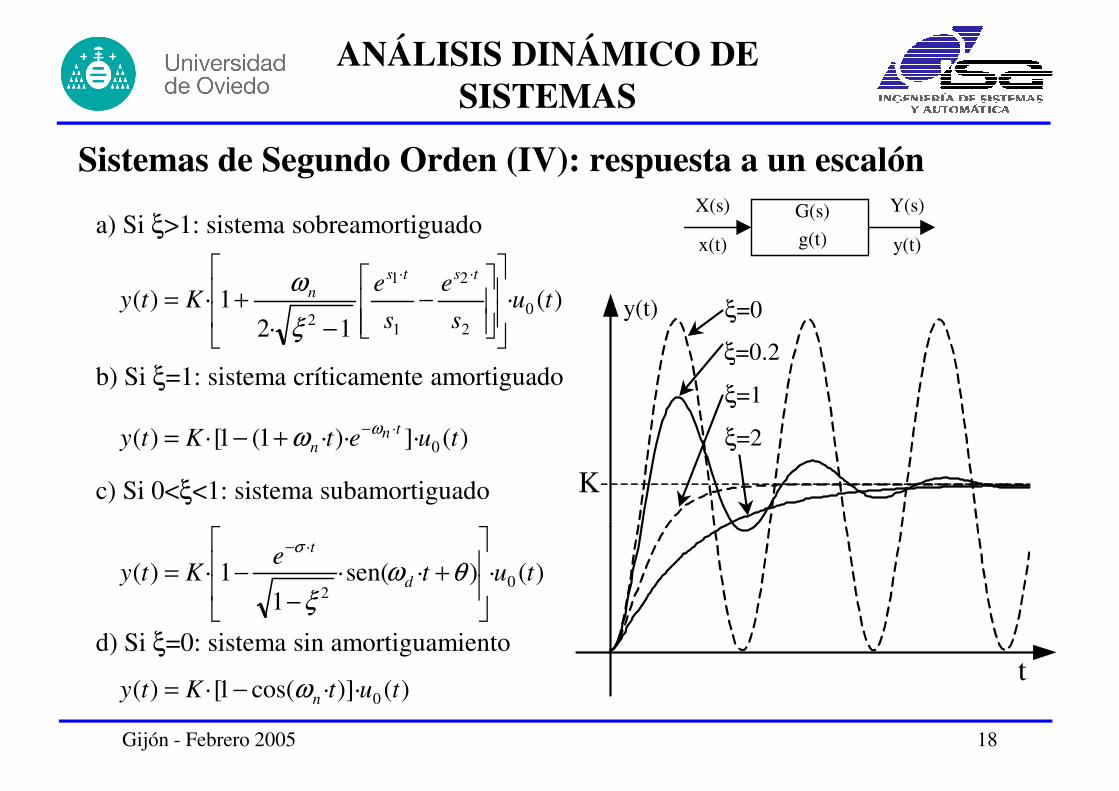
Sistemas de Segundo Orden (IV): respuesta a un escalón
a) Si ξ>1: sistema sobreamortiguado
Y(s)X(s) G(s)
x(t) y(t)g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
b) Si ξ=1: sistema críticamente amortiguado
c) Si 0<ξ<1: sistema subamortiguado
)(]·)··1(1·[)( 0
·tuetKty
tnn
ωω −+−=
)(·
1·2
1·)( 0
2
·2
1
·1
2tu
s
e
s
eKty
tsts
n
−
−+=
ξ
ωξ=0y(t)
ξ=0.2
ξ=1
ξ=2
K
Gijón - Febrero 2005 18
d) Si ξ=0: sistema sin amortiguamiento
)(·)··sen(1
1·)( 02
·
tute
Kty d
t
+
−−=
−
θωξ
σ
t)()]··cos(1·[)( 0 tutKty nω−=
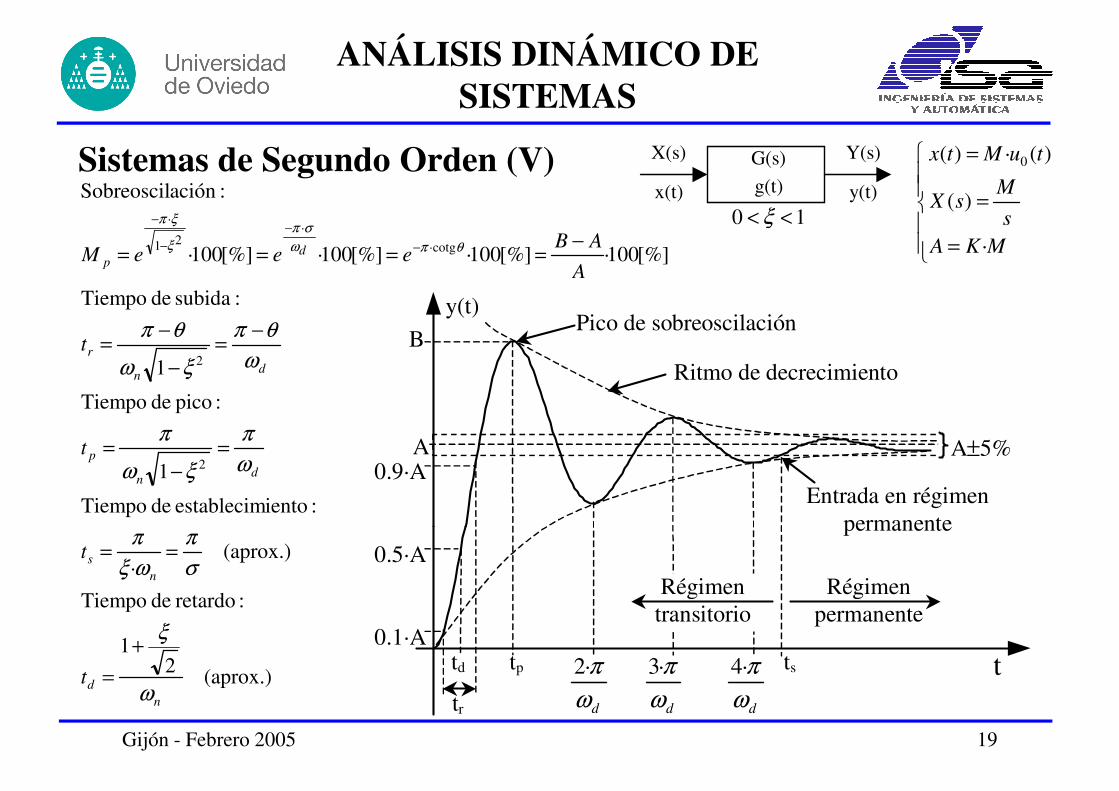
Sistemas de Segundo Orden (V)
[%]100·[%]100·[%]100·[%]100·
:aciónSobreoscil
cotg·
·21
·
dp
A
ABeeeM
θπωσπ
ξ
ξπ
−==== −
−−
−
Y(s)X(s) G(s)
x(t) y(t)g(t)
=
=
=
MKA
s
MsX
tuMtx
·
)(
)(·)( 0
10 << ξ
ANÁLISIS DINÁMICO DE SISTEMAS
:ientoestablecim de Tiempo
1
:pico de Tiempo
1
:subida de Tiempo
[%]100·[%]100·[%]100·[%]100·
2
2
dn
p
dn
r
p
t
t
AeeeM
ππ
ωπ
ξω
π
ωθπ
ξω
θπ
=−
=
−=
−
−=
====
y(t)
A±5%A
B
Entrada en régimen
permanente
Pico de sobreoscilación
0.9·A
Ritmo de decrecimiento
Gijón - Febrero 2005 19
(aprox.)2
1
:retardo de Tiempo
(aprox.)·
n
d
n
s
t
t
ω
ξ
σπ
ωξπ
+
=
==
t
Régimen
permanente
Régimen
transitorio
tstp
tr
td
dωπ·2
dωπ·3
dωπ·4
permanente
0.5·A
0.1·A
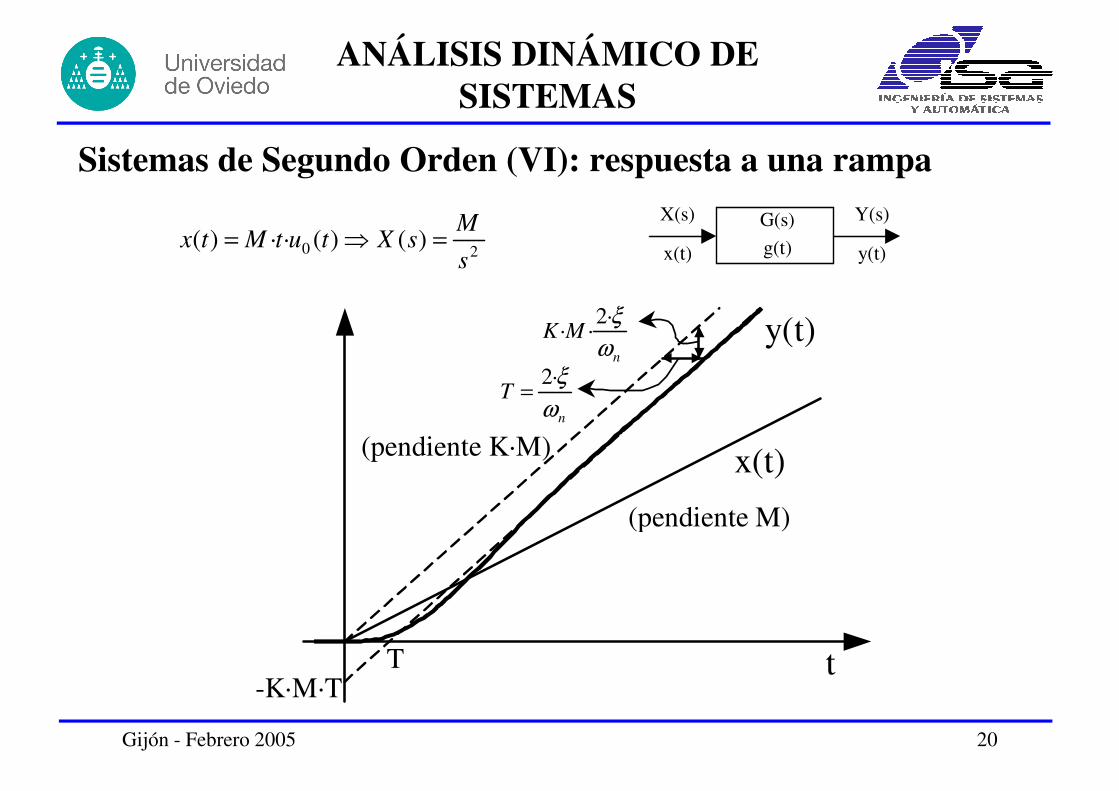
Sistemas de Segundo Orden (VI): respuesta a una rampa
20 )()(··)(s
MsXtutMtx =⇒=
Y(s)X(s) G(s)
x(t) y(t)g(t)
ANÁLISIS DINÁMICO DE SISTEMAS
s x(t) y(t)
y(t)
(pendiente K·M)x(t)
(pendiente M)
n
Tω
ξ·2=
n
MKω
ξ·2··
Gijón - Febrero 2005 20
tT-K·M·T
(pendiente M)

Sistemas de Segundo Orden (VII): cero adicional a polos complejosY(s)X(s) G(s)
x(t) y(t)g(t)
NOTA: Si el cero está próximo al origen
el factor TN aumenta peligrosamente y los
efectos del cero son más notables22
2
···2
)·1(·)(
nn
Nn
ss
sTKsG
ωωξω
++
+=
ANÁLISIS DINÁMICO DE SISTEMAS
y(t)
K
c)
a) Sistema sin cero
22
2
22
2
···2
···
···2
·)(
nn
nN
nn
n
ss
KsT
ss
KsG
ωωξω
ωωξω
+++
++=
• Respuesta a un escalón: X(s)=1/s
efectos del cero son más notablesnn
Re
Ima)
Re
Imb)
TN>0: El sistema es más
rápido y menos amortiguado:
Mp↑, tp↓ y normalmente ts↑
Gijón - Febrero 2005 21
tb) Derivada de a)
d)
Re
Imc)
-1/TNRe
Imd)-1/TN TN<0: El sistema presenta
inicialmente una respuesta
negativa: Mp↑, tp ↑ y
normalmente ts↑
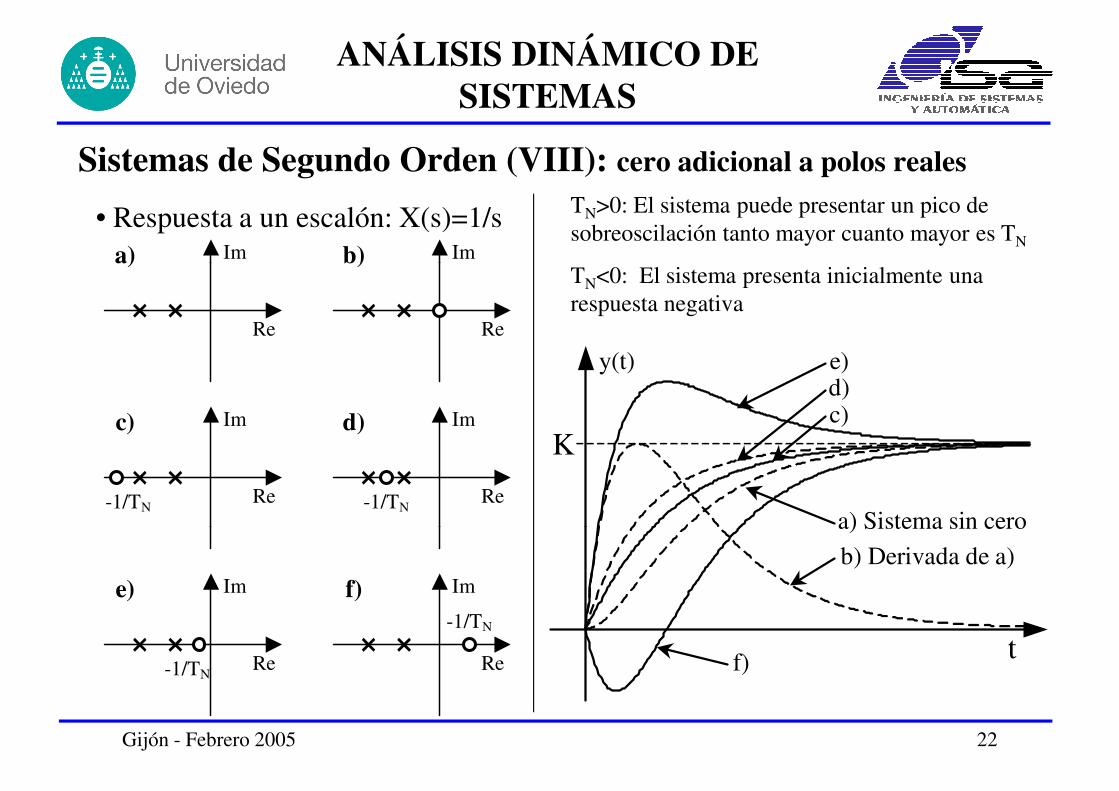
Sistemas de Segundo Orden (VIII): cero adicional a polos reales
• Respuesta a un escalón: X(s)=1/sIma) Imb)
TN>0: El sistema puede presentar un pico de
sobreoscilación tanto mayor cuanto mayor es TN
T <0: El sistema presenta inicialmente una
ANÁLISIS DINÁMICO DE SISTEMAS
y(t) e)
K
a) Sistema sin cero
d)c)
Re
a)
Re
Imd)
-1/TNRe
Imc)
-1/TN
Re
b)TN<0: El sistema presenta inicialmente una
respuesta negativa
Gijón - Febrero 2005 22
t
a) Sistema sin cero
b) Derivada de a)
f)Re
Ime)
-1/TNRe
Imf)-1/TN
Y(s)X(s)
x(t) y(t)22
2
···2
·
nn
n
ss
K
ωωξω
++)···2)(·1(
·)(
22
2
nnd
n
sssT
KsG
ωωξω
+++=
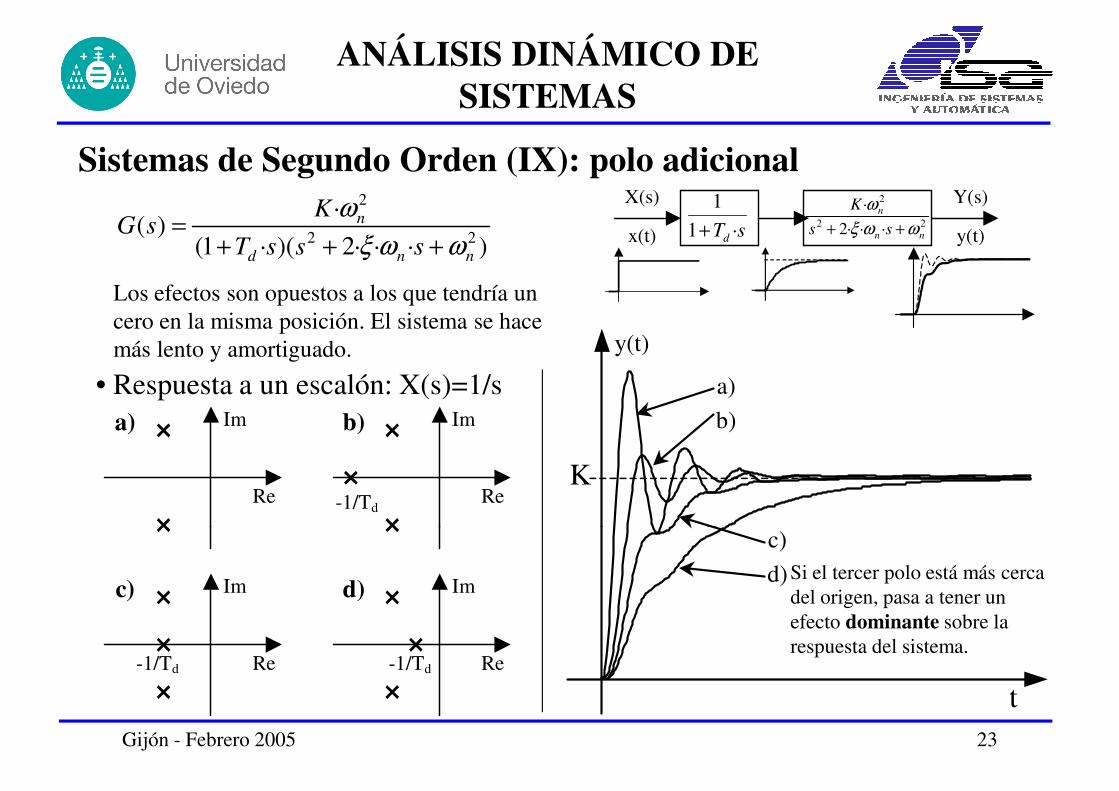
Sistemas de Segundo Orden (IX): polo adicional
ANÁLISIS DINÁMICO DE SISTEMAS
sTd ·1
1
+
y(t)
K
a)
b)
c)
• Respuesta a un escalón: X(s)=1/s
Los efectos son opuestos a los que tendría un
cero en la misma posición. El sistema se hace
más lento y amortiguado.
nnd
Re
Ima)
Re
Imb)
-1/Td
Gijón - Febrero 2005 23
t
d)
c)
Re
Imc)
-1/Td Re
Imd)
-1/Td
Si el tercer polo está más cerca
del origen, pasa a tener un
efecto dominante sobre la
respuesta del sistema.

Gijón - Febrero 2005 24
Sistemas de Orden Superior (I)∏ ∏
= =
−−
−
+++
=++++
++++=
P
p
Q
q nqnq
q
p
nn
mm
mm
sssTK
asasasa
bsbsbsbsG
2
1 1
2
1
11
10
··2
1)··1(·
...
...)(
ωω
ξ
ANÁLISIS DINÁMICO DE SISTEMAS
– Respuesta en Régimen Permanente: Ganancia estática
)0 que (siempre )()()·(·)()( 00 ======∞ →→→∞ NKa
bsGlimsGsXslimtylimy
n
msst
– Respuesta Transitoria:
∏ ∏= =
−−
+++
=++++
=L
l
R
r nrnr
rl
Nnn
nn
sssTs
asasasasG
1 1
21
110
··2
1)··1(·...
)(
ωωξ
• Ante una entrada escalón unitario: X(s)=1/s
Gijón - Febrero 2005 25
– Respuesta Transitoria:
Depende de qué polos y ceros tengan mayor efecto sobre la respuesta del sistema.
Los dominantes serán los más cercanos al eje imaginario.
Se tratará de conseguir un sistema que, siendo de un orden inferior, reproduzca sin
demasiado error la respuesta del sistema de partida
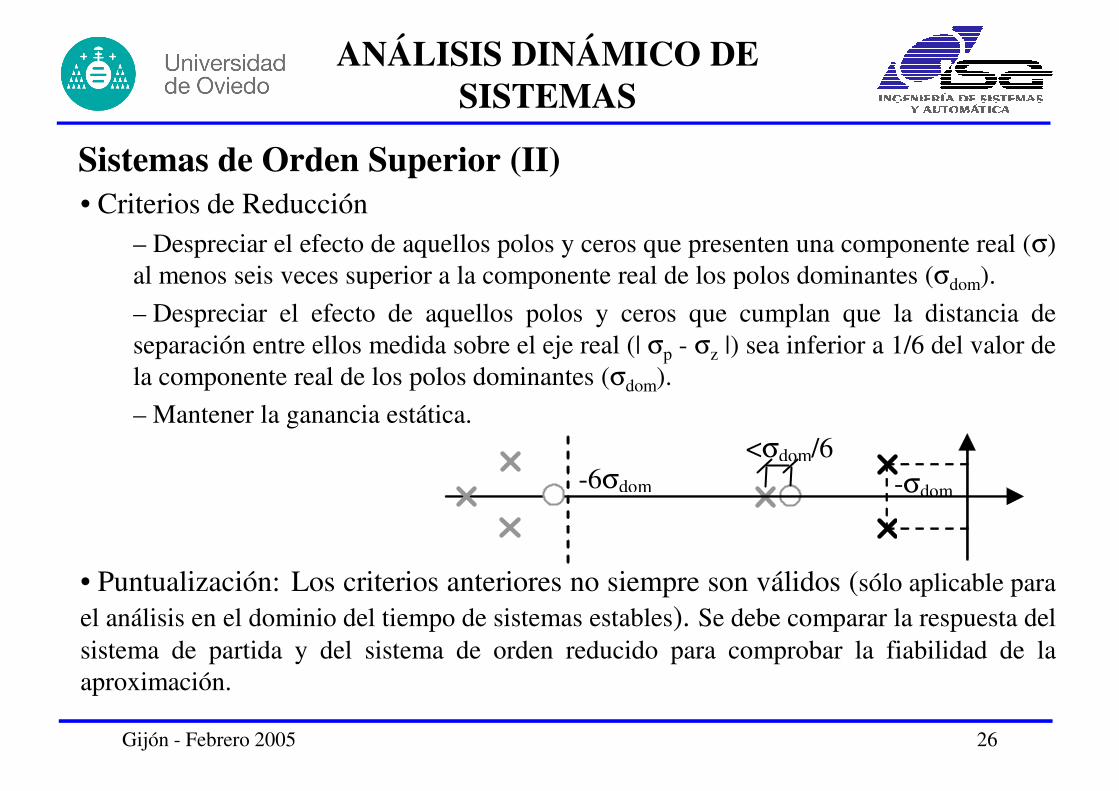
Sistemas de Orden Superior (II)
ANÁLISIS DINÁMICO DE SISTEMAS
• Criterios de Reducción
– Despreciar el efecto de aquellos polos y ceros que presenten una componente real (σ)
al menos seis veces superior a la componente real de los polos dominantes (σ ).al menos seis veces superior a la componente real de los polos dominantes (σdom).
– Despreciar el efecto de aquellos polos y ceros que cumplan que la distancia de
separación entre ellos medida sobre el eje real (| σp - σz |) sea inferior a 1/6 del valor de
la componente real de los polos dominantes (σdom).
– Mantener la ganancia estática.
-σdom
-6σdom
<σdom/6
Gijón - Febrero 2005 26
• Puntualización: Los criterios anteriores no siempre son válidos (sólo aplicable para
el análisis en el dominio del tiempo de sistemas estables). Se debe comparar la respuesta del
sistema de partida y del sistema de orden reducido para comprobar la fiabilidad de la
aproximación.
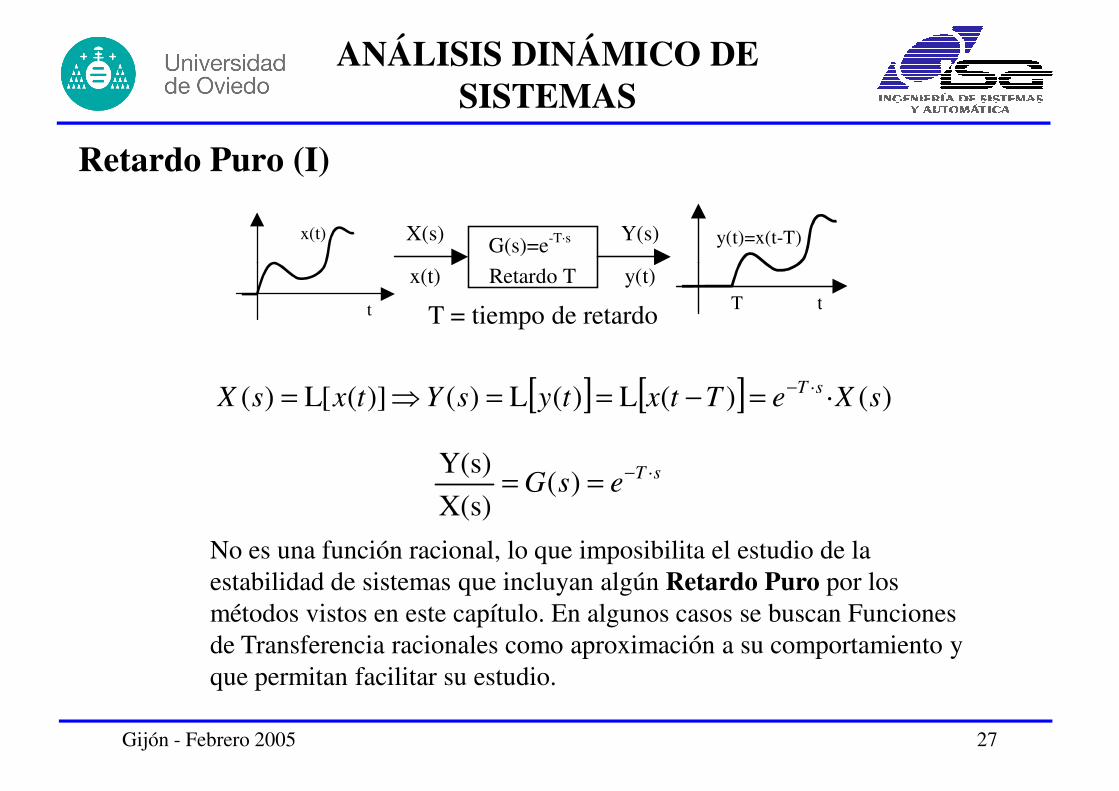
Retardo Puro (I)
x(t) y(t)=x(t-T)Y(s)X(s)G(s)=e
-T·s
ANÁLISIS DINÁMICO DE SISTEMAS
[ ] [ ] )(·)(L)(L)()]([L)( ·sXeTtxtysYtxsX
sT−=−==⇒=
t tT
x(t) y(t)Retardo T
T = tiempo de retardo
sTesG
·)(X(s)
Y(s) −==
Gijón - Febrero 2005 27
No es una función racional, lo que imposibilita el estudio de la
estabilidad de sistemas que incluyan algún Retardo Puro por los
métodos vistos en este capítulo. En algunos casos se buscan Funciones
de Transferencia racionales como aproximación a su comportamiento y
que permitan facilitar su estudio.
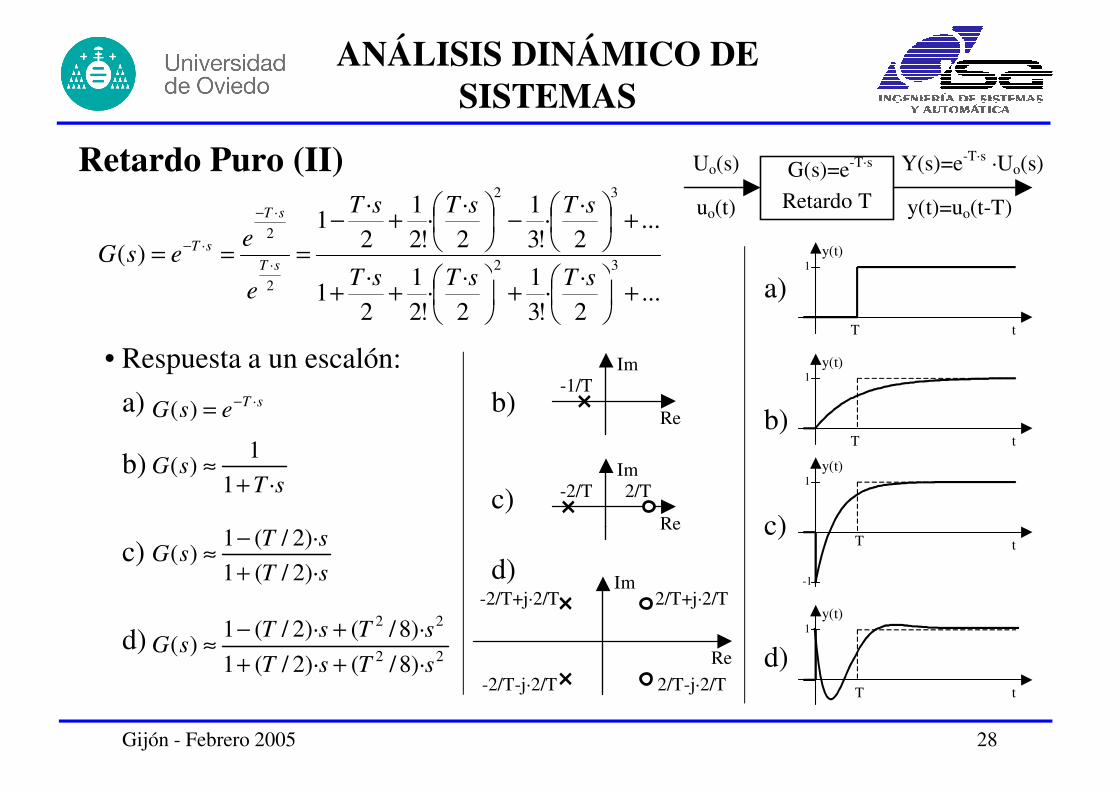
Retardo Puro (II)
·1·1·
...2
··
!3
1
2
··
!2
1
2
·1
)(32
32
·
2
·
·
+
−
+−===
−
−
sTsTsT
sTsTsT
eesG
sT
sT
sT
Y(s)=e-T·s ·Uo(s)Uo(s) G(s)=e-T·s
uo(t) y(t)=uo(t-T)Retardo T
y(t)1
ANÁLISIS DINÁMICO DE SISTEMAS
...2
··
!3
1
2
··
!2
1
2
·1
)(32
2
·
+
+
++
===sTsTsT
e
esGsT
• Respuesta a un escalón:
t
y(t)1
T
y(t)1
t
1
T
sTesG
·)( −=
sTsG
·1
1)(
+≈
sT )·2/(1−
a)
b)
a)
b)
c)Re
Im-2/T 2/T
Re
Im-1/T
b)
c)
Gijón - Febrero 2005 28
t
-1
T
t
y(t)1
T
sT
sTsG
)·2/(1
)·2/(1)(
+
−≈
22
22
)·8/()·2/(1
)·8/()·2/(1)(
sTsT
sTsTsG
++
+−≈
c)
d)
c)
d)
Re
Re
Im2/T+j·2/T
2/T-j·2/T
-2/T+j·2/T
-2/T-j·2/T
d)