3. tipos de tramo en una vía -...
TRANSCRIPT

Capítulo 3: Tipos de tramo en una vía
14
CAPÍTULO 3: TIPOS DE TRAMO EN UNA VÍA

Capítulo 3: Tipos de tramo en una vía
15
1. INTRODUCCIÓN
En esta sección se describirán todos los tipos de tramo que podemos encontrarnos en un
trazado ferroviario (rectas, tramos circulares, transiciones horizontales, transiciones verticales
y combinaciones entre ellas), además de exponer las ecuaciones paramétricas que los definen
y así utilizarlas para caracterizar la línea central. Como se puede apreciar se ha hecho una
distinción al trazado en planta y al trazado en alzado. Esto significa que rectas, curvas y
transiciones horizontales se definen como curvas planas y si se quiere dar una tercera
dimensión se tendrá que recurrir a transiciones verticales para elevar el trazado o
simplemente cambiar su pendiente.
Como se vio en apartados anteriores, será necesario tener la posición, la tangente (primera
derivada con respecto de s1), la normal y la binormal (obtenida como el producto vectorial
entre la tangente y la normal) para poder asegurar la continuidad de tramo a tramo, con lo
que también se proporcionarán sus expresiones.
Cabe destacar que las siguientes expresiones se dan en los ejes del cada tramo i. Mediante los
giros y traslaciones pertinentes se obtiene la posición, tangente, etc. en ejes globales. Como
convenio se tomará sentido inicial del avance en ejes locales el del eje OiXi positivo, el origen
se situará en el origen de coordenadas locales (Oi) y su pendiente en dicho punto será nula.
2. RECTAS
La característica principal de las rectas es que su curvatura es nula. En un trazado ferroviario
podemos tener tanto rectas en plano como en pendiente. Con los giros pertinentes podemos
pasar de un tipo a otro. La parametrización de una recta en ejes del tramo i resulta inmediata:
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
1
0 ;
0
sPr
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
1
0 ;
0
Pit
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
0
1 ;
0
Pin
(3.1)
La dirección del vector normal se toma en la dirección positiva del eje Yi por convenio.

Capítulo 3: Tipos de tramo en una vía
16
Figura 3.1: Tramo recto
3. CURVAS
Llamaremos curvas a aquellos tramos con curvatura (o radio) constante, es decir, arcos de
circunferencia. Denotando Kh como la curvatura horizontal, es decir, la curvatura en el plano
en el que está contenida la vía, obtenemos la siguiente parametrización:
1
1
sin( )
1 cos( );
0
h
h
h
h
K sK
K sK
⋅⎛ ⎞⎜ ⎟⎜ ⎟
− ⋅⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
Pr
( )( )
1
1
cos
sin ;
0
h
h
K s
K s
⋅⎛ ⎞⎜ ⎟= ⋅⎜ ⎟⎜ ⎟⎝ ⎠
Pit
( )( )
1
1
sin
cos ;
0
h
h
K s
K s
− ⋅⎛ ⎞⎜ ⎟= ⋅⎜ ⎟⎜ ⎟⎝ ⎠
Pin
(3.2)
Estas ecuaciones son simplemente las ecuaciones de la circunferencia. Los casos que tienen
curvatura constante vertical no son aplicables para el diseño de vías de ferrocarril ya que los
cambios de pendiente se hacen normalmente mediante curvas de transición exclusivamente,
con lo que no se da la posibilidad de usar este tipo de tramo en el programa. Estos casos son
más propios de vías para montañas rusas, por ejemplo.
Figura 3.2: Tramo curvo

Capítulo 3: Tipos de tramo en una vía
17
Nótese que esta curva es por definición a izquierdas. Para obtener curvas a derechas basta con
introducir la curvatura con signo negativo. Es muy importante que el ángulo de peralte tenga
el mismo signo que la curvatura, ya que en caso contrario el peralte estaría perjudicando el
comportamiento en curvas, en vez de mejorarlo.
4. CURVAS DE TRANSICIÓN
En las curvas de transición existe una diferencia entre transiciones horizontales y
verticales.
4.1. Transiciones horizontales
4.1.1. Definición de la clotoide
Las curvas de transición se utilizan para aminorar el efecto de las fuerzas centrífugas al entrar
en una curva (salir de ella o pasar de una curva a otra), de manera que estas aumenten
(disminuyan) progresivamente hasta llegar a dicha curva (recta) y no aparezcan (desaparezcan)
de repente, provocando así grandes fuerzas laterales. A lo largo de las transiciones el peralte
aumentará linealmente desde el peralte inicial al final porque no es posible introducir
instantáneamente un peralte, ya que se daría una discontinuidad en la vía en forma de
escalón.
Las curvas de transición horizontales clásicas son las clotoides [4] (espirales de Cornú o
espirales de Euler). Estas curvas tienen la propiedad de que su curvatura es monótona
creciente con respecto del parámetro de posición según la ley:
1R sLρ
= (3.3)
Donde R es el radio de la circunferencia osculadora a la curva de transición en la tangente
común (s1=L), ρ es el radio de la circunferencia osculadora a la curva de transición en el punto
definido por s1, s1 es la longitud de arco medida desde el origen de coordenadas y L la longitud

Capítulo 3: Tipos de tramo en una vía
18
de dicha curva, contada desde su punto de entrada o salida (punto de curvatura nula). Véase la
figura 3.3.
Figura 3.3: Parámetros de la clotoide en un punto cualquiera
Por definición de la propia clotoide, se cumplirá ⋅ = = 2R L cte A , de lo que podemos obtener
(ver [4]) la expresión (3.4).
( )21 /
2
s Aα = (3.4)
Como se ve en la figura 3.3, α es el ángulo que forma la curva en el punto s con la tangente de
entrada. Este ángulo nos servirá para obtener la matriz de orientación de la curva en un punto
s (3.5).
α αα α
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
cos sin 0
sin cos 0
0 0 1
iG (3.5)
El signo de α dependerá de si el giro es en sentido horario o antihorario, lo que se discutirá
más adelante.
Para definir los vectores de posición en coordenadas locales se necesita la ecuación de la
clotoide en coordenadas cartesianas. Sin embargo, la definición en coordenadas cartesianas es
más complicada, pues intervienen en ella las integrales de Fresnel [4]. Se acude al desarrollo
en serie de las funciones circulares para integrar, con lo que tendremos:
( ) ( )( )( )
1 2
1 1 100 0
coscos 1
4 1 2 !2
s n n
n
Ax s ds d s
n n
α α αα αα
∞
=
= ⋅ = ⋅ = ⋅ −+∑∫ ∫ (3.6)
Capítulo 3: Tipos de tramo en una vía
19
( ) ( )( )( )
1 2 1
1 1 1 100 0
sinsin 1
4 3 2 1 !2
s n n
n
Ay s ds d s s
n n
α α αα αα
+∞
=
= ⋅ = ⋅ ⋅ = ⋅ −+ +∑∫ ∫ (3.7)
De esta manera, gracias a (3.6) y (3.7) se ha obtenido la posición sobre un punto de la clotoide
en coordenadas locales (del tramo).
Por lo que se puede ver en (3.6) y (3.7), para obtener la curva parametrizada de la espiral
necesitamos primero conocer el parámetro α para lo que antes es necesario el cálculo de la
constante A, propia de cada clotoide.
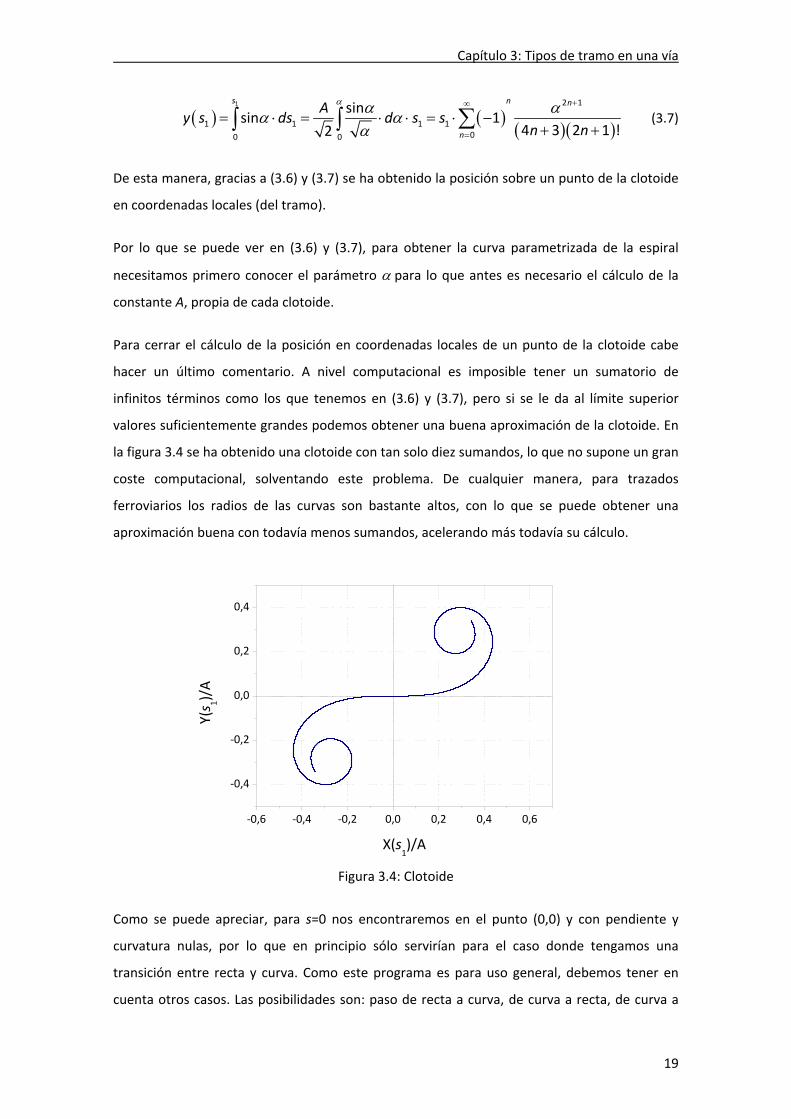
Para cerrar el cálculo de la posición en coordenadas locales de un punto de la clotoide cabe
hacer un último comentario. A nivel computacional es imposible tener un sumatorio de
infinitos términos como los que tenemos en (3.6) y (3.7), pero si se le da al límite superior
valores suficientemente grandes podemos obtener una buena aproximación de la clotoide. En
la figura 3.4 se ha obtenido una clotoide con tan solo diez sumandos, lo que no supone un gran
coste computacional, solventando este problema. De cualquier manera, para trazados
ferroviarios los radios de las curvas son bastante altos, con lo que se puede obtener una
aproximación buena con todavía menos sumandos, acelerando más todavía su cálculo.
‐0,6 ‐0,4 ‐0,2 0,0 0,2 0,4 0,6
‐0,4
‐0,2
0,0
0,2
0,4
Y(s 1)/A
X(s1)/A
Figura 3.4: Clotoide
Como se puede apreciar, para s=0 nos encontraremos en el punto (0,0) y con pendiente y
curvatura nulas, por lo que en principio sólo servirían para el caso donde tengamos una
transición entre recta y curva. Como este programa es para uso general, debemos tener en
cuenta otros casos. Las posibilidades son: paso de recta a curva, de curva a recta, de curva a

Capítulo 3: Tipos de tramo en una vía
20
curva aumentando la curvatura y de curva a curva disminuyendo la curvatura. A continuación
se verá como se han solucionado estos casos.
4.1.2. Paso de recta a curva
Como ya se ha comentado, la ecuación de la espiral está ya adecuada para este caso.
Solamente queda definir los vectores tangente y normal.
( )( )
cos
sin ;
0
αα
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
Pit
( )( )
sin
cos ;
0
αα
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
Pin
(3.8)
4.1.3. Paso de curva a recta
Necesitamos recorrer la clotoide en sentido contrario, de manera que empiece por el punto
con radio R y acabe con curvatura nula. Además, tenemos que hacer que la curva empiece en
el origen de coordenadas y con pendiente nula. El procedimiento para lograrlo es el siguiente:
o Trasladamos el punto de radio R al origen
Figura 3.5: Traslación
o Aplicamos simetría con respecto al eje OY mediante la matriz (3.9).
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
1 0 0
0 1 0
0 0 1
Aux (3.9)

Capítulo 3: Tipos de tramo en una vía
21
Figura 3.6: Simetría
o Giramos un ángulo α (este α es el correspondiente al punto con radio R), definido
en el punto 4.1.1, en sentido antihoraio (α positivo) con la matriz G definida en
este capítulo.
Figura 3.7: Giro en sentido antihorario
o Además, deberemos hacer un cambio de variable para que cambie el sentido en el
que se recorre la clotoide (3.10).
= −1 1's L s (3.10)
Donde L es el punto en el que comienza la clotoide visto desde el punto con
curvatura nula.
De esta manera recorreremos la espiral empezando por el punto de radio R y acabaremos con
radio infinito.
Los vectores tangente y normal serán los siguientes:
( )( )
cos
sin ;
0
αα
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
P iit G
( )( )
sin
cos ;
0
αα
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
P iin G
(3.11)

Capítulo 3: Tipos de tramo en una vía
22
La matriz de giro G es la correspondiente al punto de inicio del tramo. Como hemos realizado
un giro de toda la espiral para que la curva saliese tangente al eje OiXi también tenemos que
girar t y n.
4.1.4. Paso de curva a curva aumentando la curvatura
Aquí, al estar recorriendo la clotoide en el sentido “normal” sólo tenemos que hacer una
traslación y un giro, esta vez en sentido horario para que en el punto de comienzo de la
transición empiece con pendiente nula (ver figuras 3.8 y 3.9), con lo que α tendrá signo
negativo. Esto implica que, en este caso, la matriz de giro G se defina según (3.12).
( ) ( )( ) ( )
α αα α
− − −⎛ ⎞⎜ ⎟= − −⎜ ⎟⎜ ⎟⎝ ⎠
cos sin 0
sin cos 0
0 0 1
i‐G (3.12)
Figura 3.8: Traslación
Figura 3.9: Giro en sentido horario
Este procedimiento es idéntico si hay cambio de signo en la curvatura como vemos en las
figuras 3.10 y 3.11.
Figura 3.10: Traslación
Figura 3.11: Giro en sentido horario

Capítulo 3: Tipos de tramo en una vía
23
Procedemos a definir la tangente y la normal en un punto cualquiera de la espiral:
( )( )
cos
sin ;
0
αα
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
P ii ‐t G
( )( )
sin
cos ;
0
αα
−⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
P ii ‐n G
(3.13)
Vemos que los vectores son iguales que en el caso anterior, pero con una definición distinta de
la matriz de giro.
4.1.5. Paso de curva a curva disminuyendo la curvatura
En este caso el procedimiento es exactamente igual que en el paso de curva a recta, solo que
ahora no pararemos el recorrido en el punto de curvatura nula, sino en otro punto con una
curvatura menor de la inicial.
La tangente y la normal también son idénticas al caso descrito anteriormente (de nuevo con la
matriz de giro en sentido antihorario).
4.2. Transiciones verticales
Este tipo de transiciones son más sencillas de implementar, ya que lo único que se ve afectado
es la coordenada zi. Estas transiciones se basan en cambiar de forma lineal la pendiente de la
curva, es decir:
−= + TE
ev
s si i
K (3.14)
Donde i es la nueva pendiente, ie es la pendiente al inicio de la transición (ambas pendientes
en tanto por uno), s es la longitud de arco sobre la curva (s1 para el preprocesador de vías), sTE
es el valor del parámetro al inicio de la transición y Kv viene dada por:
θ= =
−vs e
L LK
i i (3.15)

Capítulo 3: Tipos de tramo en una vía
24
Donde L es la longitud de la transición y θ es el incremento total de pendiente en la transición
en tanto por uno. En nuestro caso la inclinación inicial será nula, ya que la curva tiene que salir
tangente al eje xi.
Siendo lineal la variación de la inclinación (primera derivada), se deduce que la variación de la
cota zi en función de s1 es de segundo grado, parábola de eje vertical, cuyo círculo osculador
en el vértice (posición de s en la que se intersecan las tangentes de entrada y salida en el plano
OZOS) tiene radio Kv.
Figura 3.12: Parámetros de una transición vertical (cambio de pendiente)
En todo punto dentro del acuerdo vertical se demuestra que la diferencia de cota respecto de
la rasante que pasa por la tangente de entrada con inclinación ie vale:
( )−Δ =
2
2TE
ev
s sz
K (3.16)
Para incluir una transición vertical en cualquier tipo de tramo nos basta con sumarle este
término a la coordenada zi.
En cuanto a la tangente, simplemente derivando la expresión anterior y sumándosela a la
coordenada zi del vector tangente sin cambio de pendiente obtenemos el nuevo vector
(expresión 3.17).
En resumen, para obtener cualquier curva (recta, curva o transición horizontal) con cambio de
pendiente nos basta con sumarle a la posición Δze adecuado y a la tangente s/Kv en la posición
Capítulo 3: Tipos de tramo en una vía
25
zi. Nótese que posteriormente habrá que recalcular las derivadas de las matrices de giro para
obtener las segundas derivadas del vector posición, como se explicará más adelante.
sin transición
sin transición
01
0
0
0v
v
sK
sK
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥= + ⎜ ⎟
⎡ ⎤⎢ ⎥ ⎛ ⎞⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎢ ⎥⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ +⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
t t
t
(3.17)