vision artificial
TRANSCRIPT
UNIVERSIDAD POLITECNICA SALESIANA
1
VISION ARTIFICIAL
Oscar David Sari VillaUNIVERSIDAD POLITÉCNICA SALESIANA
Carrera de Ingeniería Electrónica Y [email protected]
Resumen—En este documento se presenta uninforme de las diversas formas de visión artificial,sus diferentes usos y aplicaciones, como porejemplo la visión artificial aplicada a la detecciónde transeúntes para que de esta manera con pocopersonal humano se pueda realizar un trabajoamplio que originalmente requeriría muchaspersonas.
PALABRAS CLAVES: Procesamiento deimágenes, seguimiento visual, conteo de personas,detección de flujo vehicular.
I. INTRODUCCIÓN
El proceso general que realizaremos es la dedetectar el movimiento ya sea de personas u otroobjeto mediante el uso de aparatos electrónicos osoftware como por ejemplo el Display IMG,TeamSoftware, Irmotion, Goratech Ireport. De estamanera facilitaremos el trabajo de las personas yaestas no tendrán que estar todo el tiempo tras lascámaras de vigilancia.Sea cual sea el mecanismo o software que vayamosa utilizar debe poseer la capacidad de detectar,analizar e informar sobre cualquier evento quesuceda en área determinada [1] [2] [3].Los sistemas de visión artificial deben tener la grancapacidad de detectar objetos tal y cual como lohacen los seres humanos, mediante la detección deobjetos estos deben tomar decisiones pero esto ya sevincula con la inteligencia artificial que en este casono hablares mucho de ello [4].
II. ESTRUCTURA DEL SOFTWARE
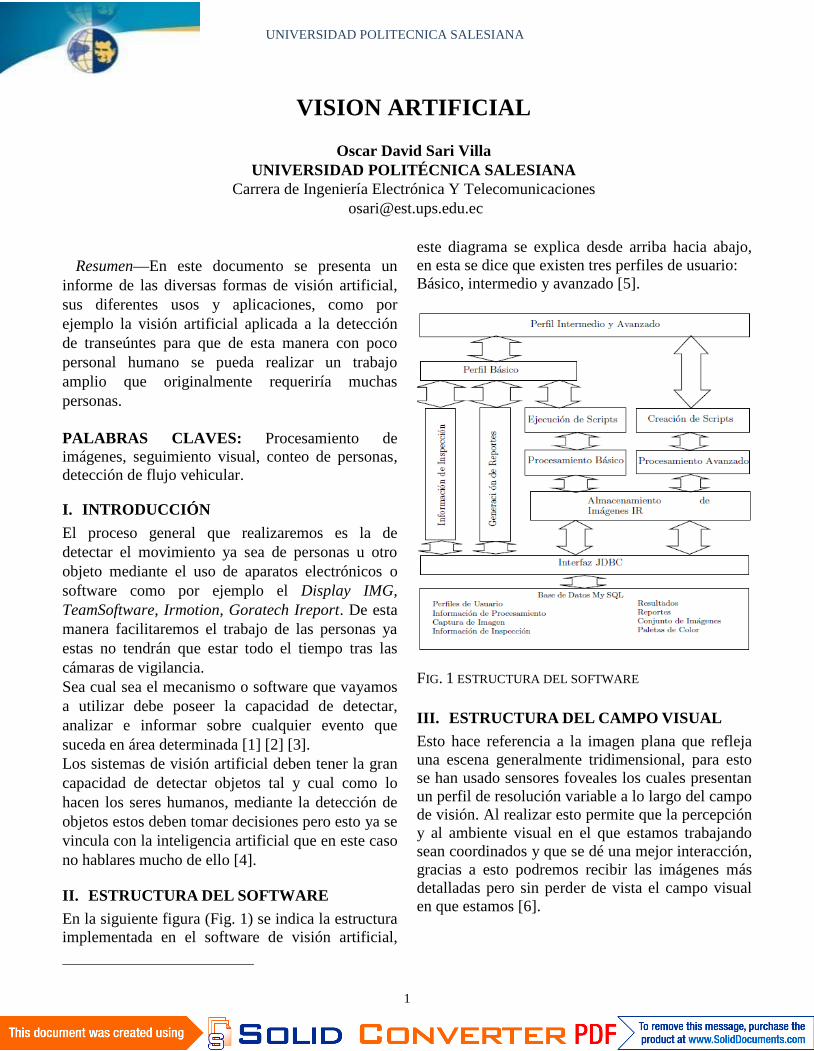
En la siguiente figura (Fig. 1) se indica la estructuraimplementada en el software de visión artificial,
este diagrama se explica desde arriba hacia abajo,en esta se dice que existen tres perfiles de usuario:Básico, intermedio y avanzado [5].
FIG. 1 ESTRUCTURA DEL SOFTWARE
III. ESTRUCTURA DEL CAMPO VISUAL
Esto hace referencia a la imagen plana que reflejauna escena generalmente tridimensional, para estose han usado sensores foveales los cuales presentanun perfil de resolución variable a lo largo del campode visión. Al realizar esto permite que la percepcióny al ambiente visual en el que estamos trabajandosean coordinados y que se dé una mejor interacción,gracias a esto podremos recibir las imágenes másdetalladas pero sin perder de vista el campo visualen que estamos [6].
UNIVERSIDAD POLITECNICA SALESIANA
2
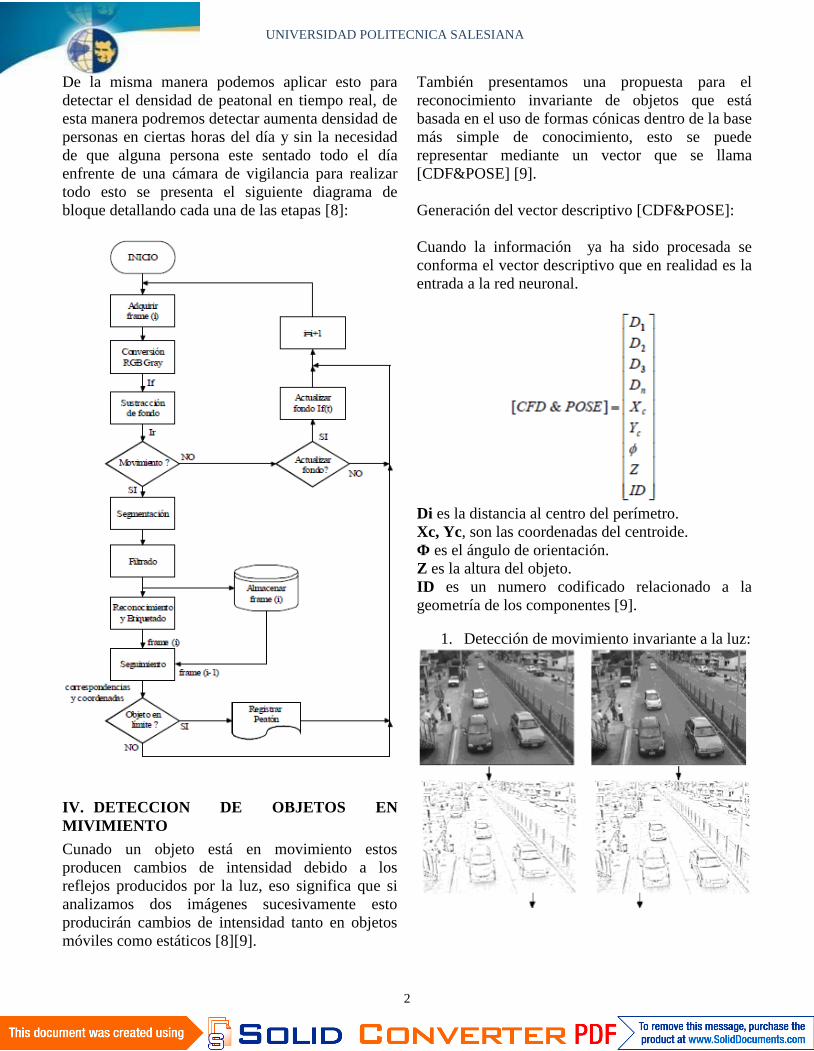
De la misma manera podemos aplicar esto paradetectar el densidad de peatonal en tiempo real, deesta manera podremos detectar aumenta densidad depersonas en ciertas horas del día y sin la necesidadde que alguna persona este sentado todo el díaenfrente de una cámara de vigilancia para realizartodo esto se presenta el siguiente diagrama debloque detallando cada una de las etapas [8]:
IV. DETECCION DE OBJETOS ENMIVIMIENTO
Cunado un objeto está en movimiento estosproducen cambios de intensidad debido a losreflejos producidos por la luz, eso significa que sianalizamos dos imágenes sucesivamente estoproducirán cambios de intensidad tanto en objetosmóviles como estáticos [8][9].
También presentamos una propuesta para elreconocimiento invariante de objetos que estábasada en el uso de formas cónicas dentro de la basemás simple de conocimiento, esto se puederepresentar mediante un vector que se llama[CDF&POSE] [9].
Generación del vector descriptivo [CDF&POSE]:
Cuando la información ya ha sido procesada seconforma el vector descriptivo que en realidad es laentrada a la red neuronal.
Di es la distancia al centro del perímetro.Xc, Yc, son las coordenadas del centroide.Φ es el ángulo de orientación.Z es la altura del objeto.ID es un numero codificado relacionado a lageometría de los componentes [9].
1. Detección de movimiento invariante a la luz:
UNIVERSIDAD POLITECNICA SALESIANA
3
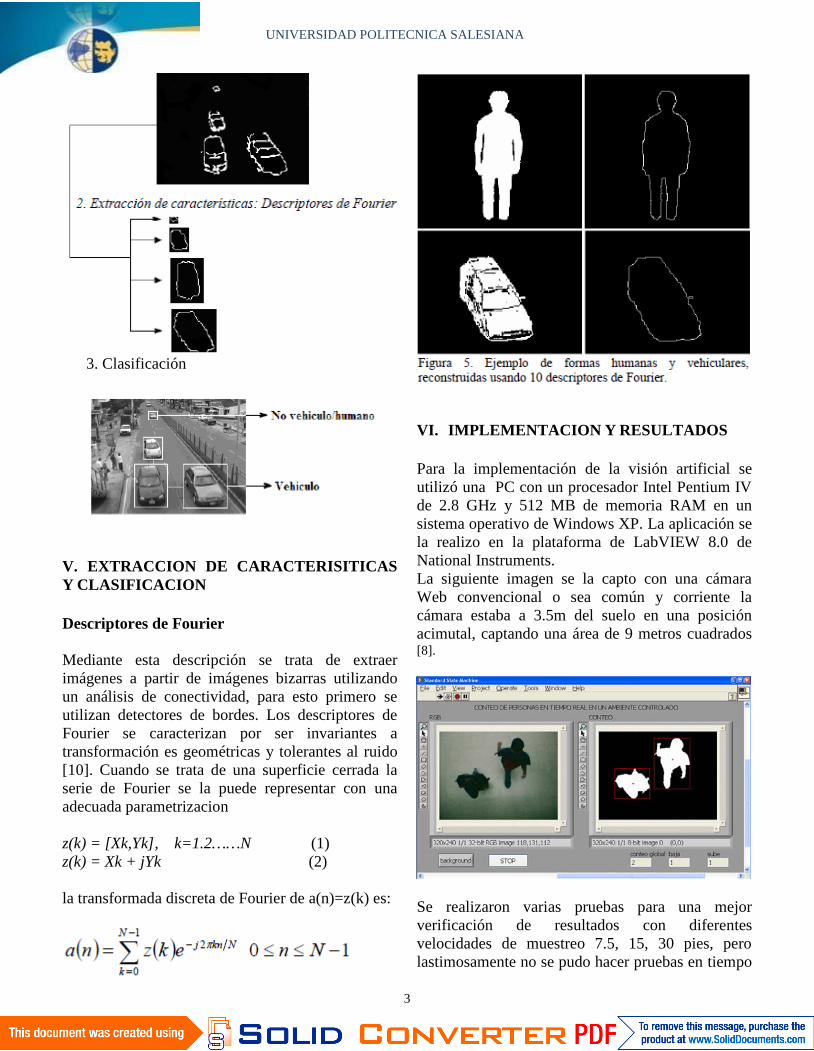
3. Clasificación
V. EXTRACCION DE CARACTERISITICASY CLASIFICACION
Descriptores de Fourier
Mediante esta descripción se trata de extraerimágenes a partir de imágenes bizarras utilizandoun análisis de conectividad, para esto primero seutilizan detectores de bordes. Los descriptores deFourier se caracterizan por ser invariantes atransformación es geométricas y tolerantes al ruido[10]. Cuando se trata de una superficie cerrada laserie de Fourier se la puede representar con unaadecuada parametrizacion
z(k) = [Xk,Yk], k=1.2……N (1)z(k) = Xk + jYk (2)
la transformada discreta de Fourier de a(n)=z(k) es:
VI. IMPLEMENTACION Y RESULTADOS
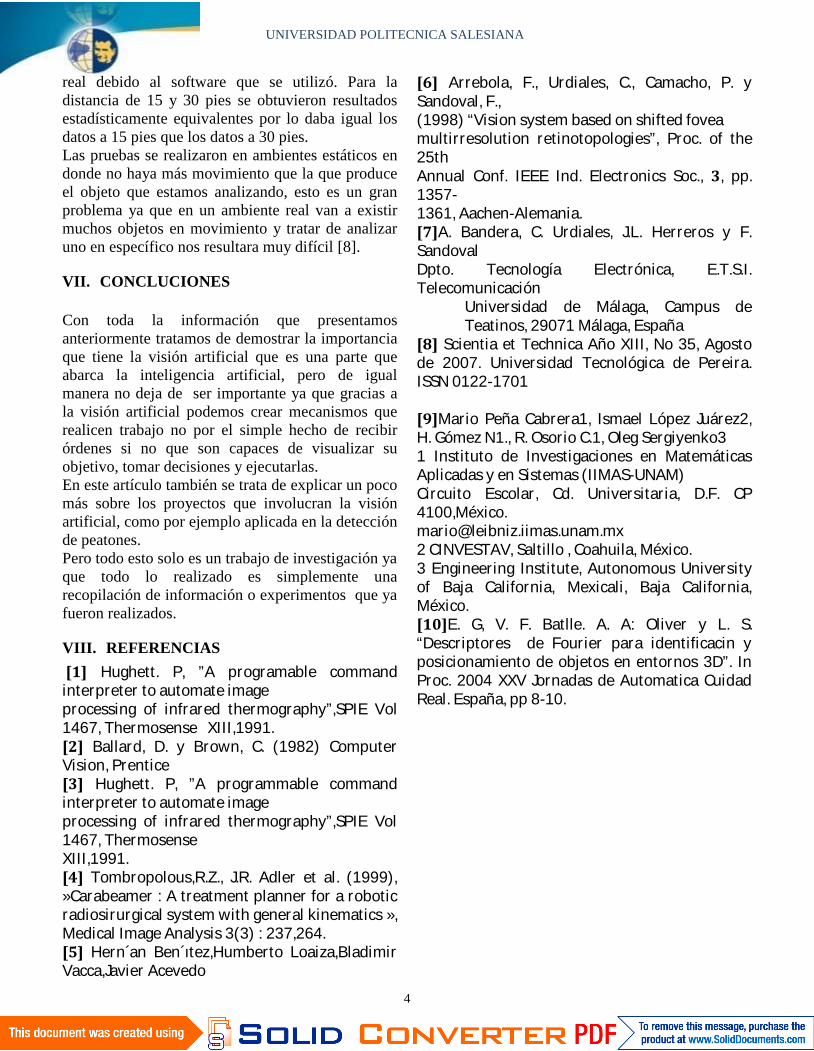
Para la implementación de la visión artificial seutilizó una PC con un procesador Intel Pentium IVde 2.8 GHz y 512 MB de memoria RAM en unsistema operativo de Windows XP. La aplicación sela realizo en la plataforma de LabVIEW 8.0 deNational Instruments.La siguiente imagen se la capto con una cámaraWeb convencional o sea común y corriente lacámara estaba a 3.5m del suelo en una posiciónacimutal, captando una área de 9 metros cuadrados[8].
Se realizaron varias pruebas para una mejorverificación de resultados con diferentesvelocidades de muestreo 7.5, 15, 30 pies, perolastimosamente no se pudo hacer pruebas en tiempo
UNIVERSIDAD POLITECNICA SALESIANA
4
real debido al software que se utilizó. Para ladistancia de 15 y 30 pies se obtuvieron resultadosestadísticamente equivalentes por lo daba igual losdatos a 15 pies que los datos a 30 pies.Las pruebas se realizaron en ambientes estáticos endonde no haya más movimiento que la que produceel objeto que estamos analizando, esto es un granproblema ya que en un ambiente real van a existirmuchos objetos en movimiento y tratar de analizaruno en específico nos resultara muy difícil [8].
VII. CONCLUCIONES
Con toda la información que presentamosanteriormente tratamos de demostrar la importanciaque tiene la visión artificial que es una parte queabarca la inteligencia artificial, pero de igualmanera no deja de ser importante ya que gracias ala visión artificial podemos crear mecanismos querealicen trabajo no por el simple hecho de recibirórdenes si no que son capaces de visualizar suobjetivo, tomar decisiones y ejecutarlas.En este artículo también se trata de explicar un pocomás sobre los proyectos que involucran la visiónartificial, como por ejemplo aplicada en la detecciónde peatones.Pero todo esto solo es un trabajo de investigación yaque todo lo realizado es simplemente unarecopilación de información o experimentos que yafueron realizados.
VIII. REFERENCIAS
[1] Hughett. P, ”A programable commandinterpreter to automate imageprocessing of infrared thermography”,SPIE Vol1467, Thermosense XIII,1991.[2] Ballard, D. y Brown, C. (1982) ComputerVision, Prentice[3] Hughett. P, ”A programmable commandinterpreter to automate imageprocessing of infrared thermography”,SPIE Vol1467, ThermosenseXIII,1991.[4] Tombropolous,R.Z., J.R. Adler et al. (1999),»Carabeamer : A treatment planner for a roboticradiosirurgical system with general kinematics »,Medical Image Analysis 3(3) : 237,264.[5] Hern´an Ben´ıtez,Humberto Loaiza,BladimirVacca,Javier Acevedo
[6] Arrebola, F., Urdiales, C., Camacho, P. ySandoval, F.,(1998) “Vision system based on shifted foveamultirresolution retinotopologies”, Proc. of the25thAnnual Conf. IEEE Ind. Electronics Soc., 3, pp.1357-1361, Aachen-Alemania.[7]A. Bandera, C. Urdiales, J.L. Herreros y F.SandovalDpto. Tecnología Electrónica, E.T.S.I.TelecomunicaciónUniversidad de Málaga, Campus deTeatinos, 29071 Málaga, España[8] Scientia et Technica Año XIII, No 35, Agostode 2007. Universidad Tecnológica de Pereira.ISSN 0122-1701[9]Mario Peña Cabrera1, Ismael López Juárez2,H. Gómez N1., R. Osorio C.1, Oleg Sergiyenko31 Instituto de Investigaciones en MatemáticasAplicadas y en Sistemas (IIMAS-UNAM)Circuito Escolar, Cd. Universitaria, D.F. CP4100,Mé[email protected] CINVESTAV, Saltillo , Coahuila, México.3 Engineering Institute, Autonomous Universityof Baja California, Mexicali, Baja California,México.[10]E. G, V. F. Batlle. A. A: Oliver y L. S.“Descriptores de Fourier para identificacin yposicionamiento de objetos en entornos 3D”. InProc. 2004 XXV Jornadas de Automatica CuidadReal. España, pp 8-10.