vibraciones mecanicas 1.pptx
TRANSCRIPT
TEMA
VIBRACIONES LIBRES YAMORTIGUADAS
UPLA
DINAMICA Y VIBRACIONES
1.1. Introducción: grados de libertad y magnitudes características
VIBRACIÓN MECÁNICA:
Oscilación repetida en torno a una posición de equilibrio
- Vibraciones convenientes: péndulo para regular un reloj, cuerda
pulsada de una guitarra
- Vibraciones inconvenientes: vibraciones en estructuras a causa de
terremotos, del viento, circulación de vehículos, máquinas.....

1) Fuerza adicional: desplazamiento equilibrio
2) Fuerza recuperadora: vuelta a posición equilibrio
3) Posición equilibrio: velocidad no nula
SISTEMAS CON UN GRADO DE LIBERTAD
GRADO DE LIBERTAD:
Variables necesarias y suficientes para especificar la posición de un sistema mecánico
EJEMPLOS:
- disco que se mueve en el plano: tres grados de libertad
desplazamiento x, y
ángulo de rotación alrededor CM
- sólido rígido: seis grados de libertad
tres traslaciones elementales
tres rotaciones, seis coordenadas
- sistema con un grado de libertad ≠ sistema simple:
motor de automóvil: ángulo de giro del cigüeñal
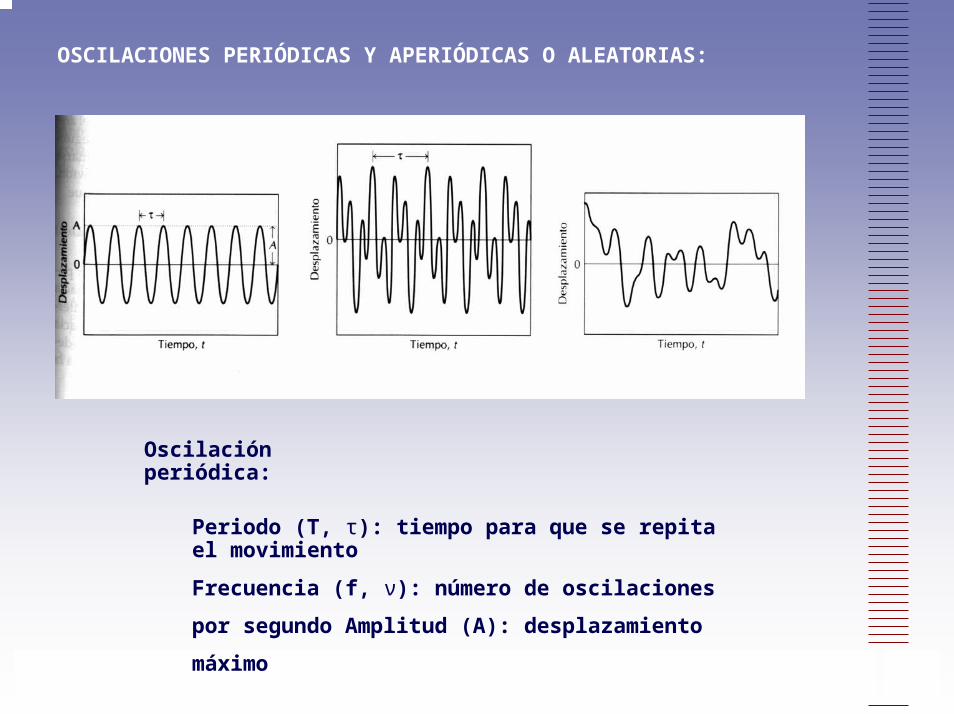
OSCILACIONES PERIÓDICAS Y APERIÓDICAS O ALEATORIAS:
Oscilación periódica:
Periodo (T, τ): tiempo para que se repita el movimiento
Frecuencia (f, ν): número de oscilaciones por segundo
Amplitud (A): desplazamiento máximo
CLASIFICACIÓN DE LAS VIBRACIONES MECÁNICAS:
VIBRACIONES LIBRES: fuerzas gravitatorias o fuerzas elásticas
1) NO AMORTIGUADAS:
-fuerzas de rozamiento (resistencia del aire,
viscosidad....) son despreciables
-se repiten indefinidamente
2) AMORTIGUADAS:
- fuerzas de rozamiento no despreciables
- tienden a desaparecer
VIBRACIONES FORZADAS:
- compensación de pérdida de energía de la oscilación amortiguada
- fuerzas externas

Diseño y construcción de puentes y edificios:
FENÓMENO DE LA RESONANCIA:
- Edificación: oscilador con un conjunto de frecuencias naturales (rigidez,
masa y detalles de la construcción)
- Oscilación forzada: fuerza debida a sacudidas del terreno en terremoto
FRECUENCIA ONDAS SÍSMICAS ≈ FRECUENCIA NATURAL EDIFICIO
1.2. Vibraciones libres no amortiguadas
FUERZA RECUPERADORA:
- proporcional al desplazamiento: kx
- dirigida hacia posición de equilibrio
- movimiento periódico: MOVIMIENTO ARMÓNICO SIMPLE
- modelo de partida para vibraciones en aplicaciones técnicas
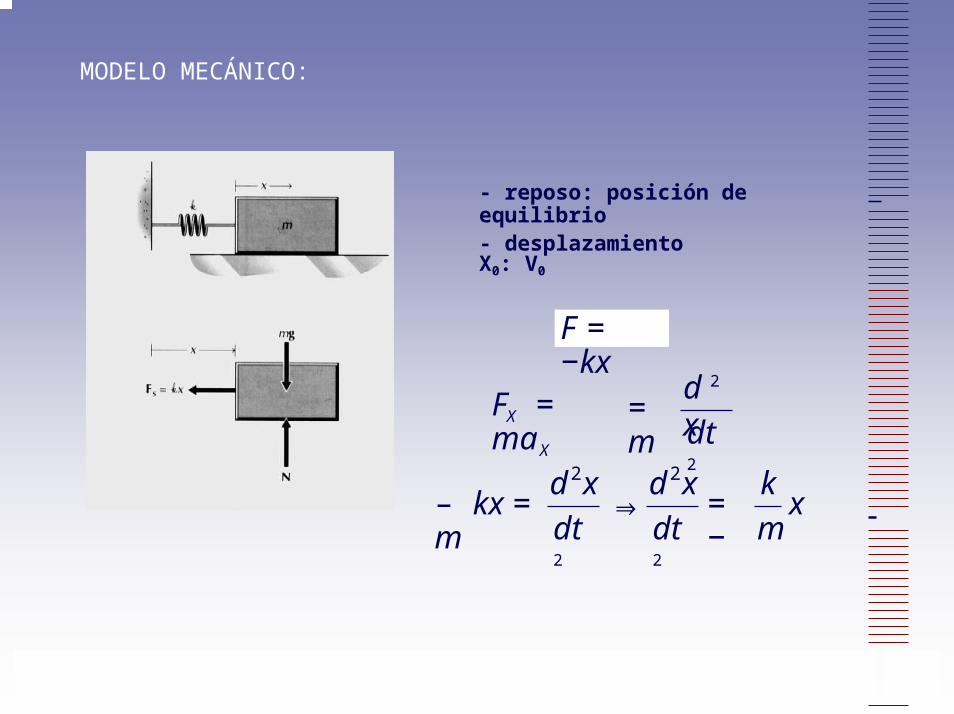
MODELO MECÁNICO:
- reposo: posición de equilibrio
- desplazamiento X0: V0
F = −kx
d 2 xFX = maX
= m dt 2
2 2d x d x k– kx = m
⇒ = −
x dt 2 dt 2 m
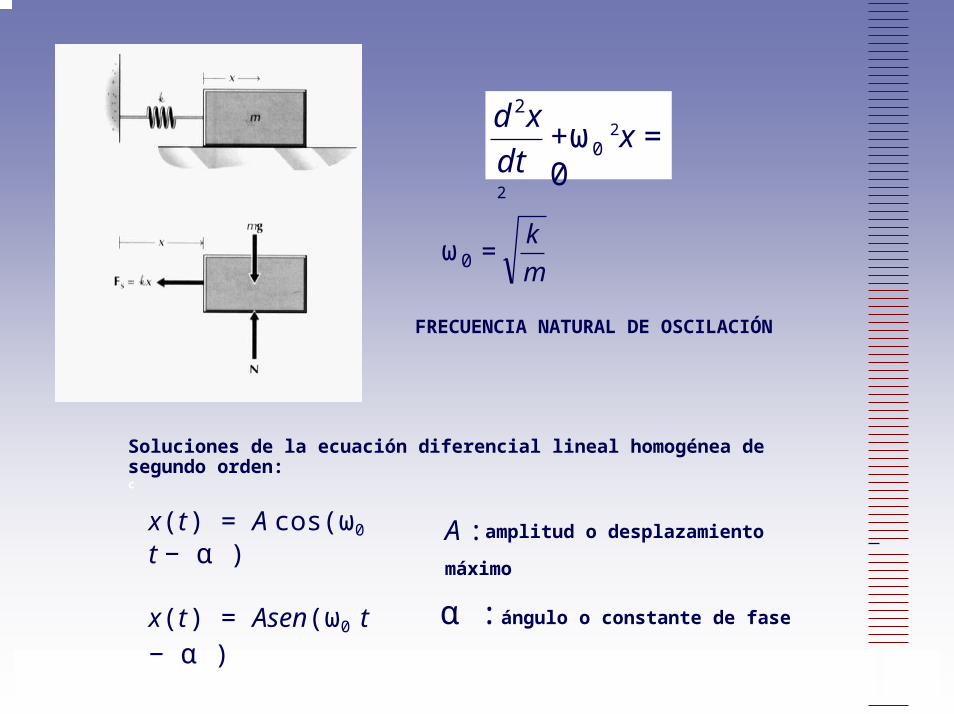
2d x+ω 2x = 0
0dt 2
kω =0 m
FRECUENCIA NATURAL DE OSCILACIÓN
Soluciones de la ecuación diferencial lineal homogénea de segundo orden:
c
x(t) = A cos(ω0 t − α )
x(t) = Asen(ω0 t − α )
A :amplitud o desplazamiento máximo
α :ángulo o constante de fase
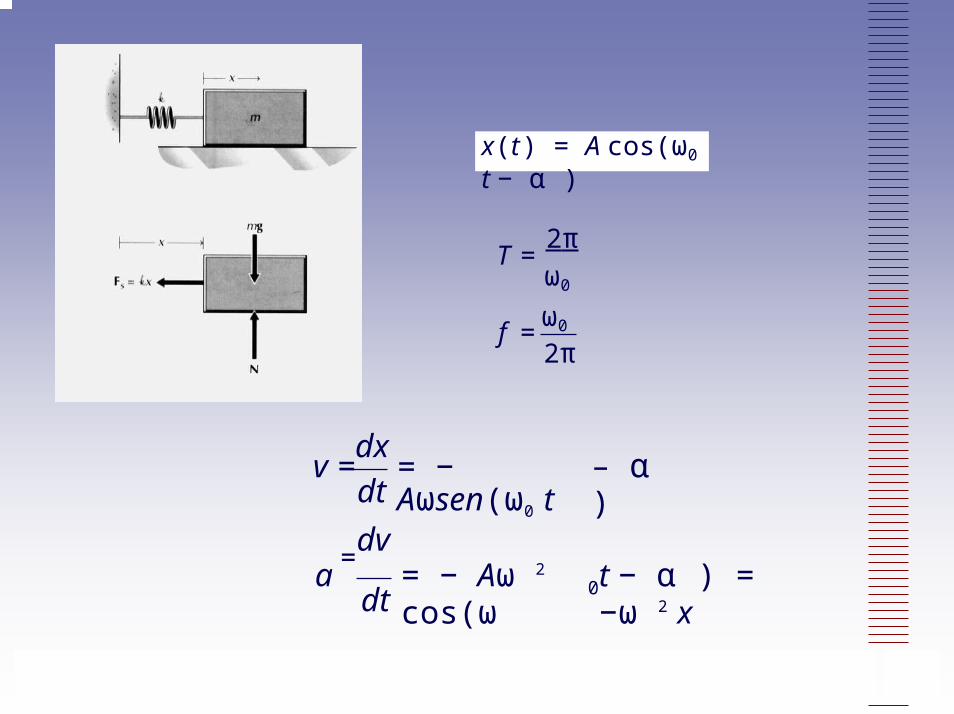
x(t) = A cos(ω0 t − α )
2πω0
ω0
T =
f = 2π
dx= − Aωsen(ω0 t
– α )
v = dt
=dv
= − Aω 2
cos(ωt − α ) = −ω 2 x
a 0dt
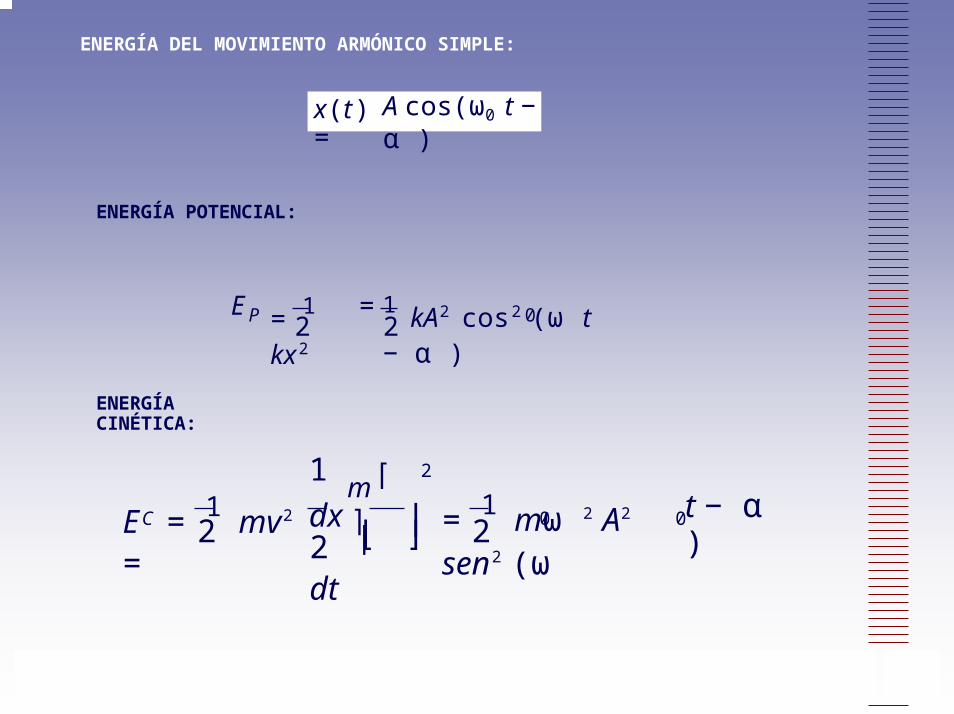
ENERGÍA DEL MOVIMIENTO ARMÓNICO SIMPLE:
A cos(ω0 t − α )
x(t) =
ENERGÍA POTENCIAL:
= 1 kx2 1 kA2 cos2 (ω t − α )
E =P 02 2
ENERGÍA CINÉTICA:
2
E = 1 mv2
=
1 m⎡ dx
⎤ = 1 mω 2 A2 sen2
(ω
t − α )2 ⎢ dt
⎥C 0 02 2⎣ ⎦
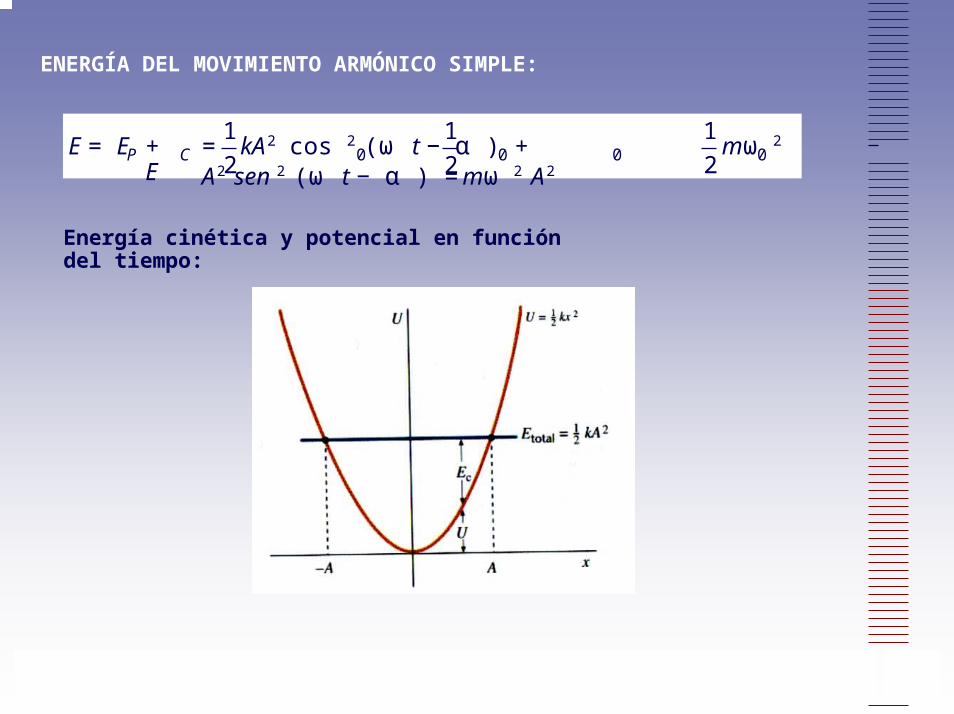
ENERGÍA DEL MOVIMIENTO ARMÓNICO SIMPLE:
1 1 1= kA2 cos 2 (ω t − α ) + mω 2 A2
sen 2 (ω t − α ) = mω 2 A2
E = E
+ E
P C 0 0 0 02 2 2
Energía cinética y potencial en función del tiempo:
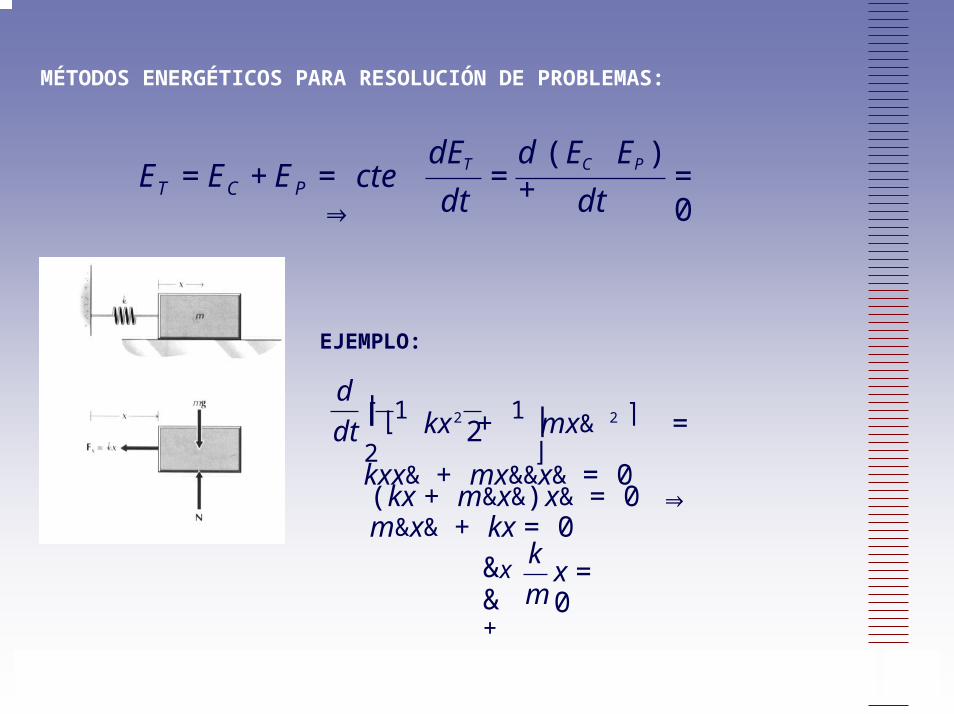
MÉTODOS ENERGÉTICOS PARA RESOLUCIÓN DE PROBLEMAS:
d (EC
+dET EP )= + = cte
⇒= =
0E E ET C P dt dt
EJEMPLO:
d⎡ 1 kx2 + 1 mx& 2 ⎤ = kxx& +
mx&&x& = 0
⎢⎣ 2
⎥⎦
dt 2
(kx + m&x&)x& = 0 ⇒ m&x& + kx = 0
k&x& +
x = 0m
1.3. Vibraciones libres amortiguadas
- VIBRACIONES NO AMORTIGUADAS: idealización
pérdidas de energía por rozamiento pequeñas
intervalos de tiempo cortos
- FUERZAS RESISTIVAS: proporcional a la velocidad y en sentido
opuesto
= −λv
Fr
Oscilación en un fluido: aire, agua....
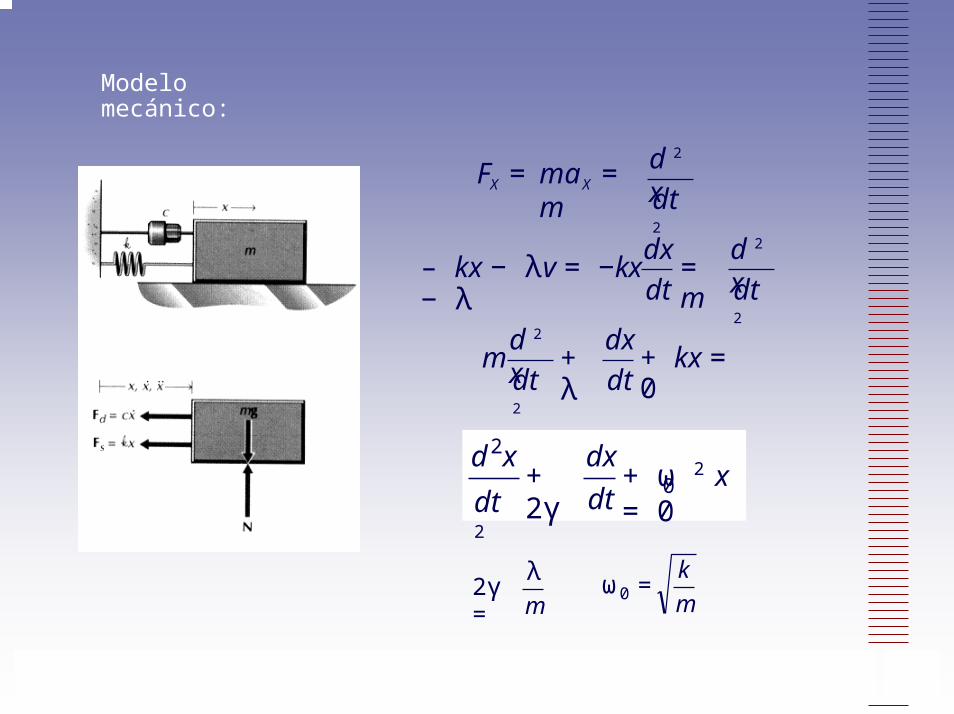
Modelo mecánico:
d 2 xFX =maX = mdt 2
d 2 xdx– kx − λv = −kx − λ
= m dt 2dt
d 2 x dx+ λ
+ kx = 0
mdt 2 dt
2d x dx+ ω 2 x = 0
+ 2γ
0dt 2 dt
λ kω2γ
==0 mm
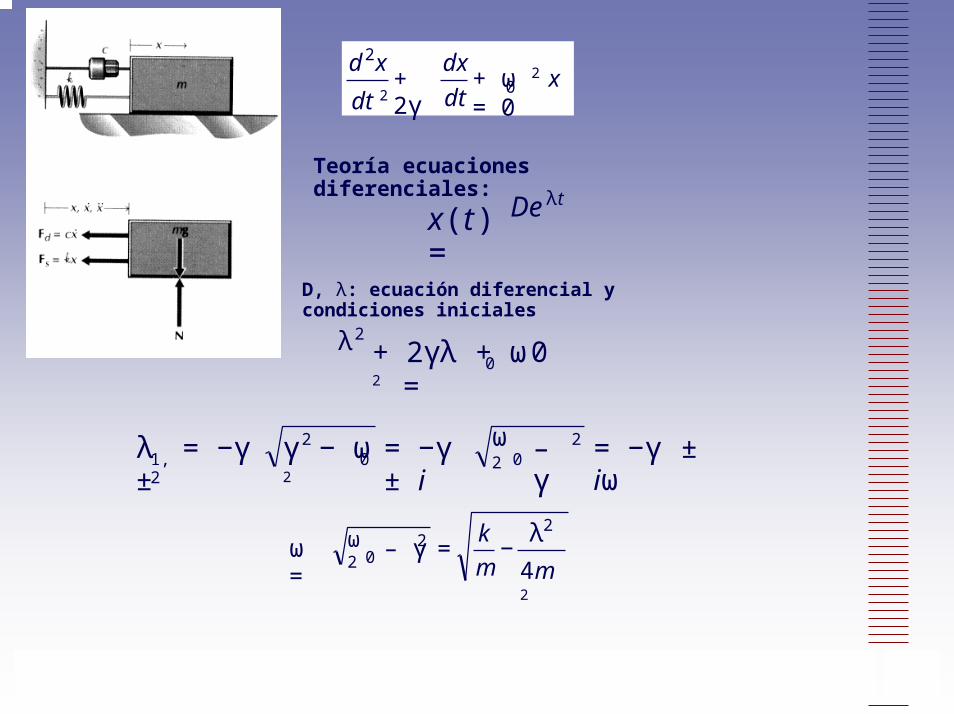
2d x dx+ ω 2 x = 0
+ 2γ
0dt 2 dt
Teoría ecuaciones diferenciales:
Deλtx(t) =
D, λ: ecuación diferencial y condiciones iniciales
λ2+ 2γλ + ω 2 =
00
γ − ω 2
2 ω 22λ = −γ
±= −γ ± i
– γ
= −γ ± iω
1,2 0 0
2λkω 2
2ω =
– γ=
−04m 2m
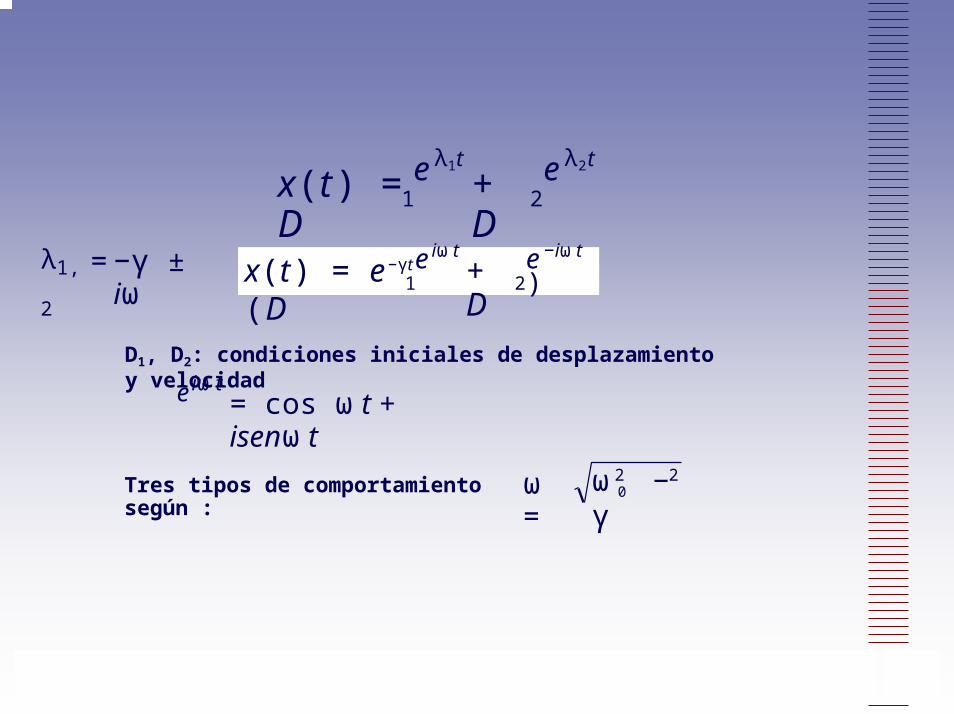
eλ1t eλ2t
x(t) = D
+ D
1 2
λ1,2 −γ ± iω
= x(t) = e−γt
(D
e iω t e −iω t
)+ D
1 2
D1, D2: condiciones iniciales de desplazamiento y velocidad
e iω t= cos ω t + isenω t
2 2ω =
ω 0 − γ
Tres tipos de comportamiento según :
1) SISTEMAS SUBAMORTIGUADOS:
ω 0 f γ
2 2ω =
ω − γ f 00
La solución física debe ser siempre real:
Ae iαAe−iαD =D
=21
−γt
iωt
−iωt
−γt
−iα
iωt
iα −iωt
x(t) = e
+ D2e
) = e
+ Ae e(D1e ( Ae e )
Ae −γt
cos(ωt − α )
x(t) =
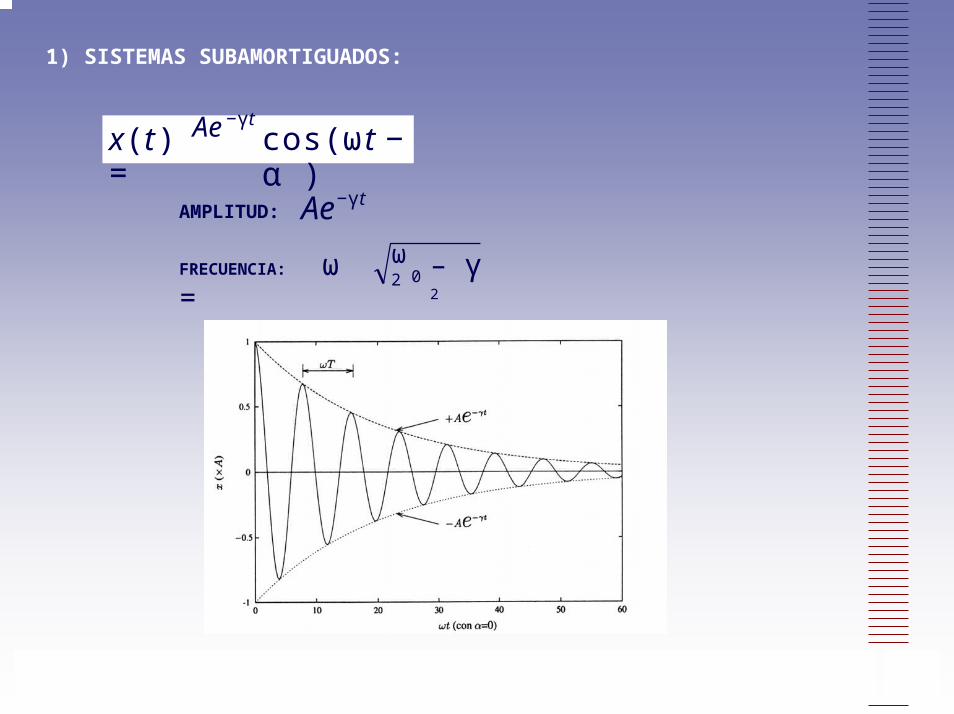
1) SISTEMAS SUBAMORTIGUADOS:
Ae −γtcos(ωt − α )
x(t) =
−γtAeAMPLITUD:
ω 2
– γ 2
FRECUENCIA: ω =
0
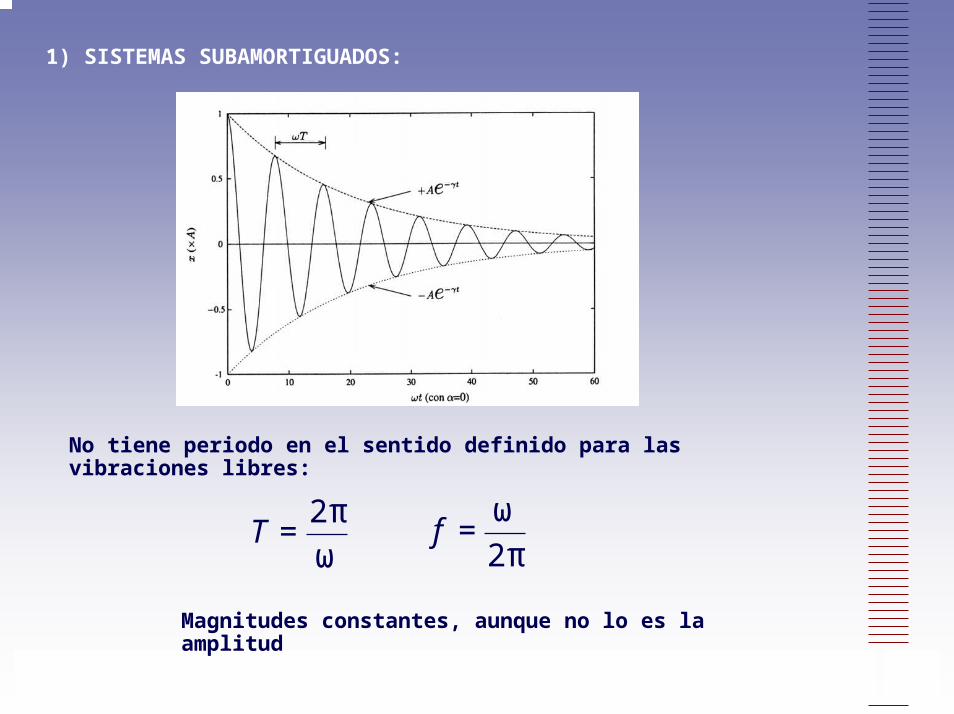
1) SISTEMAS SUBAMORTIGUADOS:
No tiene periodo en el sentido definido para las vibraciones libres:
ω2πf =T
= ω 2π
Magnitudes constantes, aunque no lo es la amplitud
2) SISTEMAS CRÍTICAMENTE AMORTIGUADOS:
ω 0 = γ
ω = 0
El sistema no oscila:
x(t) = (B + Ct)e−γt
B,C: condiciones iniciales de desplazamiento y velocidad
- amortiguamiento crítico: menor amortiguamiento para no oscilación
- vuelta a la posición de equilibrio siguiendo curva exponencial
- no se puede redefinir periodo y frecuencia
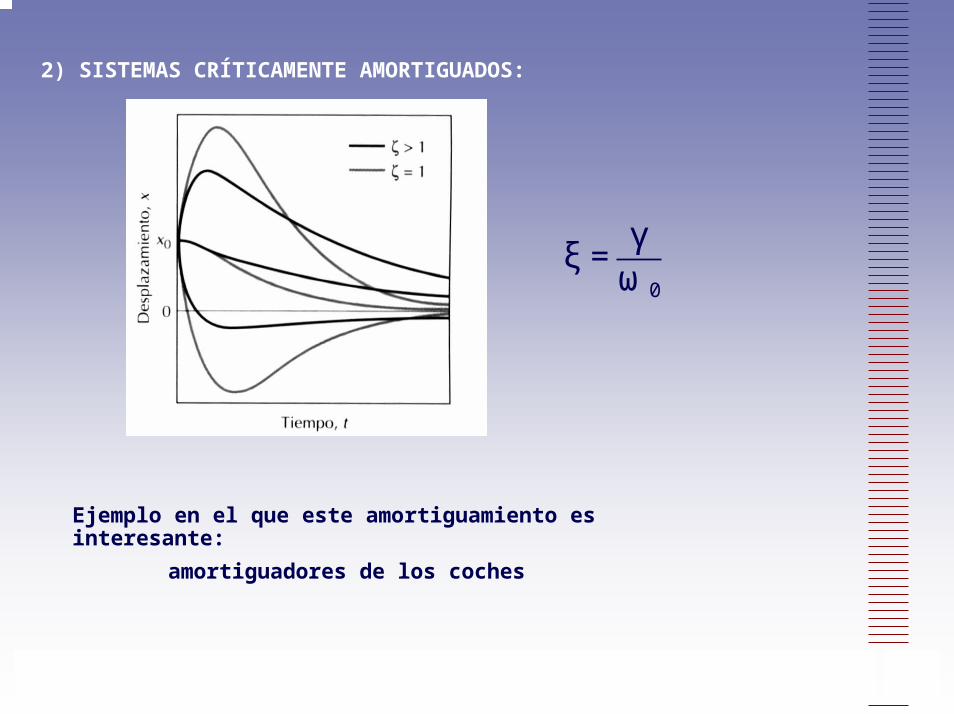
2) SISTEMAS CRÍTICAMENTE AMORTIGUADOS:
γξ =
ω0
Ejemplo en el que este amortiguamiento es interesante:
amortiguadores de los coches
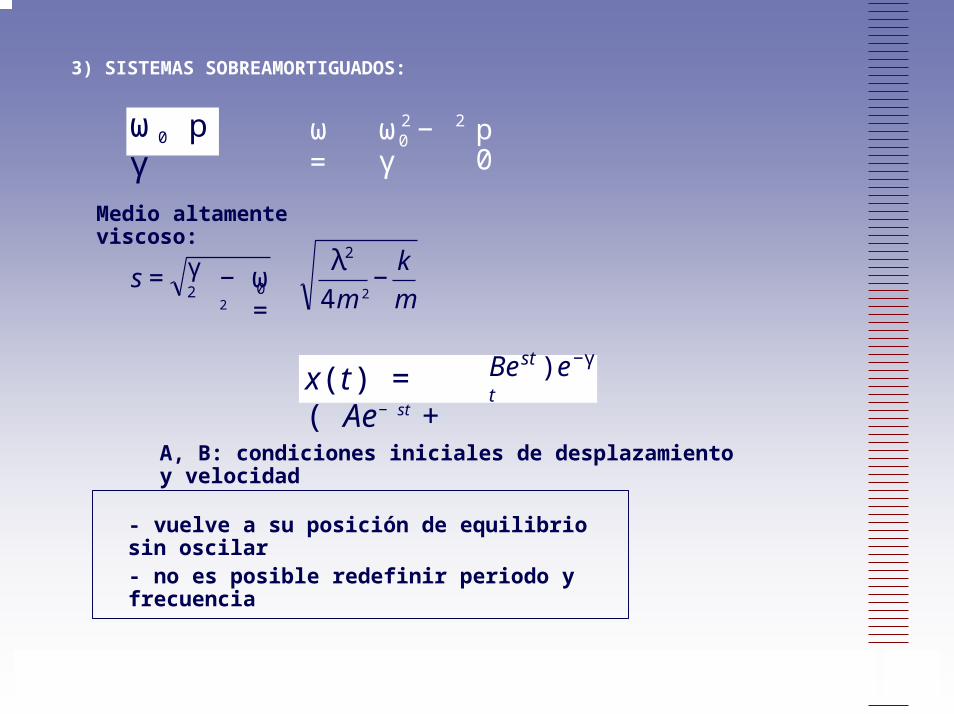
3) SISTEMAS SOBREAMORTIGUADOS:
ω 0 p γ
2 2ω =
ω − γ
p 00
Medio altamente viscoso:
2λ kγ 2
− ω 2
=s = −0 4m2 m
x(t) = ( Ae− st
+
Best )e−γt
A, B: condiciones iniciales de desplazamiento y velocidad
- vuelve a su posición de equilibrio sin oscilar
- no es posible redefinir periodo y frecuencia
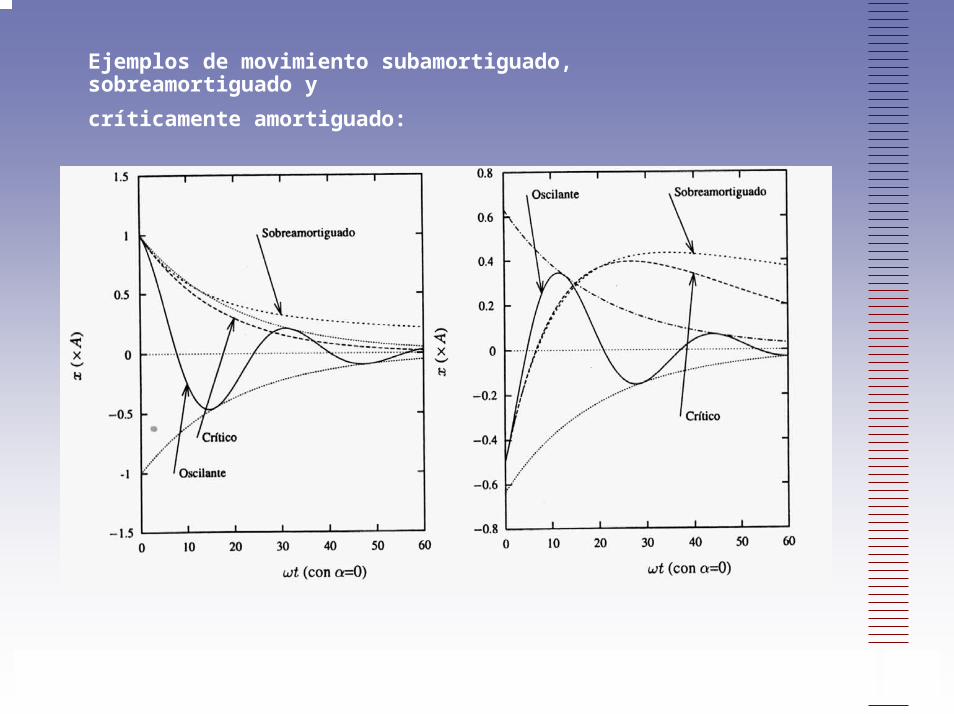
Ejemplos de movimiento subamortiguado, sobreamortiguado y
críticamente amortiguado: