universidad nacional de ingenierÍacybertesis.uni.edu.pe/bitstream/uni/3625/1/lopez_gr.pdf ·...
TRANSCRIPT

UNIVERSIDAD NACIONAL DE INGENIERÍA
FACULTAD DE CIENCIAS
ESCUELA PROFESIONAL DE FÍSICA
TESIS PARA OPTAR EL TÍTULO PROFESIONAL DE LICENCIADO EN FÍSICA
TITULADO:
EVALUACION Y MEDICION DE LAS VIBRACIONES DE UN EDIFICIO POR MEDIO DE LA TECNICA LASER PHOTO
DEFLECTION (LPD)
PRESENTADO POR:
BACH. ROOSVELT LOPEZ GARCIA
ASESOR:
DR. ANÍBAL VALERA PALACIOS
LIMA-PERU
2011

Dedicatoria
El presente trabajo se lo dedico a mi familia y a todas aquellas personas que de alguna manera me ayudaron a realizar esta contribución a la sociedad.

1 INTRODUCCION ........................... ............................................................ 1
2 MARCO TEORICO ........................ ~-· ......................................................... 2
2.1 Fuente de vibración interna ...... ·····-···· .................................................. .3
2.1.1 Equipos mecánicos .....••. - ................................................. 3
2.1.2 Los ocupantes del edificio_ ................................................ .3
2.2 Fuente de vibración externa .... _ ...................................................... .3
2.2.1 Los vientos ..................................................................... 3
2.2.2 Explosiones .................................................................... 3
2.2.3 Impactos ....................•................................................... 3
2.2.4 Temblores de tierra ........................................................... 3
2.2.5 Actividades relacionadas coon la construcción ......................... .3
2.2.6 Trafico automotriz .......................................................... 4
2.2.7 Ferrocarriles ................................................................. 4
2.3 Modelo sencillo de fenómeno de nresonancia .................................... 9
2.4 Transformada de Fourier ... ········-··········································· .... 16
2.4.1 Series de Fourier ......... ····-·························· .................... 16
3 PARTE EXPERIMENTAL .................... -· ............................................... ... 24
3.1 EVALUACIONDEESPECTROS .......................................................... 24
3.1.1 Señal. ................................................................................. 24
3.1.2 Tiempo de grabación de la semal.. ............................................... 24
3.1.3 Muestra ................................................................................ 24
3.1.4 Tamaño de muestra .................................................................. 25

3.1.5 Tiempo de importación ............................................................. 25
3.1.6 Tiempo de FFT ................ - .................................................... 25
3.1.7 Espectro .............................................................................. 25
3.1.8 Posición temporal. .............•.................................................... 26
3.2 El sistema LPD ................................................................................ 26
3.3 Ruido ........................................................................................... 27
3.4 Vibraciones aleatorias ........................................................................ 28
3.4.1 Equipos utilizados ................................................................... 29
3.4.2 Procedimiento experimentaL .................................................... 29
3.4.3 Montaje experimenta1. ............................................................. 30
3 .4.4 Espectros del pabellón R ............................................................ 40
3.5 Vibraciones deterministas ................................................................... 69
3.5.1 Equipos utilizados ................................................................... 71
3.5.2 Procedimiento experimental ....................................................... 71
3.5.3 Montaje experimental. .............................................................. 73
3.5.4 Espectros del pabellón Q ............................................................ 77
4 SIMULACION EN EL ETABS ..................................................................... 85
4.1 El programa ETABS ................... -..................................................... 85
4.2 Simulación del pabellón Q ................................................................... 86
4.2.1 Esclerómetro .......................................................................... 88
4.3 Espectros de la simulación .................................................................. 97
5 CONCLUSIONES Y RECOMENDACIONES .............................................. 111
6 BffiLIOGRAFIA .................................................................................... 113
EV ALUACION Y MEDICION DE LAS VIBRACIONES DE UN EDIFICIO POR MEDIO DE LA TECNICA LASER PHOTO
DEFLECTION (LPD)
CAPÍTULOl
INTRODUCCIÓN
El análisis de los periodos de vibración de un edificio, juegan un papel muy
importante en el diseño estructural, especialmente el primer periodo ya que es un
componente dominante en las vibraciones inducidas por los vientos y los sismos.
Conocer el comportamiento dinámico de los edificios bajo excitación sísmica es de gran
importancia en zonas propensas a terremotos, por esta razón muchos países tienen
equipados algunos de sus edificios con instrumentos y monitores grabando la respuesta de
los edificios a los sismos.
Antes de que ocurra un terremoto es importante identificar los parámetros actuales que
rigen el comportamiento dinámico de la construcción (periodo y formas modales). Esta
información se obtiene generalmente por medio de pruebas de vibración forzada o
ambiental, usando para ello el Microtremor, sistemas acoplados de GPS, etc., los cuales
utilizan ciertas técnicas y principios fisicos para su funcionamiento. Hay una técnica
denominada Deflexión laser que se aplica en espectroscopia, pero no hay trabajos
relacionados (resultado de la evaluación bibliográfica) aplicando esta técnica a la
estimación de vibraciones de edificios.
En el Laboratorio de Óptica y Semiconductores de la Facultad de Ciencias de la
Universidad Nacional de Ingeniería el Dr. Aníbal Valera Palacios, profesor principal de la
Facultad de Ciencias y jefe del laboratorio ha desarrollado una técnica laser no
convencional (técnica no destructiva) para la evaluación de vibraciones de estructuras.
1
Esta técnica denominada Laser Photo Deflection (LPD) ya ha sido usado y con el cual ha
sido posible evaluar estructuras pequeñas, como por ejemplo: paredes y techos. Como
certificación de la efectividad del Método en Mención, cabe mencionar una serie de
evaluaciones realizadas en el Laboratorio de Estructuras de la UNI (CISMID) en el mes de
enero del año 2008 y de cuyos resultados principales se formuló una primera publicación
científica [2].
Por ello el objetivo del presente trabajo ha sido aplicar el Método de Foto Deflexión Laser
a la vibración de edificios ubicados en la Universidad Nacional de Ingeniería (pabellón R
facultad de ciencias y pabellón Q de la FIEE) con el fin de obtener las frecuencias
fundamentales de las mismas.
CAPÍTUL02
MARCO TEÓRICO
Todas las estructuras al poseer masa y elasticidad son capaces de vibrar con su
frecuencia natural. Estas vibraciones pueden ser causadas por fuentes tales como motores,
compresores, vientos, terremotos, etc. Si la frecuencia de estas fuentes de vibración
coincide con una de las frecuencias naturales de la estructura, ésta entrará en resonancia y
su amplitud de vibración puede alcanzar magnitudes lo suficientemente grandes como para
dañar o incluso destruir la estructura. Para evitar la resonancia es necesario conocer las
frecuencias naturales de vibración de los diferentes modos de vibración de la estructura así
como también el espectro de frecuencias de las fuentes de vibración con las que la
estructura pueda entrar en contacto. En un edificio existen dos clases de vibraciones, las
que provienen de una fuente interna y las que provienen de una fuente externa.
2

2.1 FUENTE DE VIBRACIÓN INTERNA
La mayor parte de las vibraciones que se generan en el interior de los edificios son
provocadas por:
2.1.1 Equipos mecánicos
Está constituido por maquinas y equipos que tengan componentes que roten o se desplacen
periódicamente (ascensores, ventiladores, bombas, etc.)
2.1.2 los ocupantes del edificio
Los ocupantes mediante la marcha, el salto, la danza y la carrera pueden ongmar
vibraciones.
2.2 FUENTE DE VIBRACIÓN EXTERNA
Las fuentes de vibraciones externas son generalmente debidas a:
2.2.1 Los vientos
La intensidad de las presiones que ejercen los vientos sobre las estructuras varía en el
tiempo. Esto induce efectos vibratorios sobre ellas.
2.2.2 Explosiones
Una explosión produce ondas de presión en el aire, o movimientos del terreno. Ambos
efectos afectan estructuras localizadas cerca del lugar de la explosión.
2.2.3 Impactos
El hecho de que una masa sufra una colisión con otra, induce una fuerza impulsiva
aplicada sobre las dos masas, la cual induce vibraciones.
2.2.4 Temblores de tierra
El efecto sobre las estructuras de los movimientos del terreno producidos por la ocurrencia
de un sismo conduce a vibraciones importantes de la estructura.
2.2.5 Actividades relacionadas con la construcción
3

2.2.6 Tráfico automotriz
2.2. 7 Ferrocarriles
Periódicas
(a)
(b)
No periódicas
(e) --
(d)
Fig.2.1
111 111 111 111
Motor girando con su eje desequilibrado, en un edificio.
Rotación de la hélice en ia popa del buque.
Onda de presión de una explosión, en un edificio.
Terremoto en un tanque de agua.
. Aquí mostramos cómo se comportan las fuentes excitadoras conforme transcurre el tiempo (a) periódica simple (b) periódica compleja (e) impulsiva (d) de larga duración.
Cuando tratamos con sistemas estructurales reales como un edificio es necesario, en
general, considerar varios grados de libertad, cada uno correspondiente a una coordenada
independiente. Como los edificios son sistemas continuos entonces tienen infinitos grados
4

de libertad, sin embargo es posible reducir su número a uno finito considerando el hecho
que los desplazamientos intermedios de los elementos pueden ser expresados en función de
los desplazamientos de los nudos (punto de unión de vigas y columnas) extremos.
En el caso de los edificios sometidos a ondas sísmicas, la excitación principal son
aceleraciones horizontales (y una vertical que es poco importante en general o que en caso
de serlo puede ser tratada independientemente). Esto se traduce en fuerzas de inercia
horizontales que originan en .la estructura una deformación lateral y cuyos grados de
libertad independientes importantes son los desplazamientos horizontales de los nudos.
Existen otras consideraciones aplicables a este caso, como el hecho de que la masa esta
principalmente concentrada en el nivel de cada entrepiso y por consiguiente las fuerzas de
inercia son fuerzas horizontales aplicadas al nivel de cada entrepiso, esto sugiere que los
grados de libertad dinámicos independientes son aquellos asociados con la dirección de las
fuerzas. Lo cierto es que un edificio sometido a la acción de un sismo, como se dijo
anteriormente es un sistema de varios grados de libertad por lo que es importante analizar
teóricamente el tratamiento de dichos sistemas. El modelo más simple de un sistema de
varios grados de libertad corresponde a una serie de masas interconectadas por resortes sin
peso como se muestra en la figura 2.2. Este modelo se denomina sistema de acoplamiento
cercano. Estrictamente solo es aplicable a las vibraciones laterales de un edificio con vigas
infinitamente rígidas y despreciando la deformación axial de las columnas, o también a
algún sistema vibratorio cuyas deformaciones sean principalmente desplazamientos
laterales. Por esta razón se denomina modelo tipo cortante. Existen otros modelos más
exactos como el modelo de acoplamiento lejano el cual considera que todas las masas están
interconectadas, ver figura 2.3.
S

M3
M2
Ml Ml M2 M3
Fig.2.2
Esta figura muestra un edificio de 3 pisos que puede ser modelado por tres masas interconectadas por resortes, a esto se denomina sistema de acoplamiento cercano.
Fig.2.3
Esta figura muestra el modelo de acoplamiento lejano.
Los parámetros más importantes en la vibración de un edificio, como en cualquier
estructura, son las frecuencias naturales, las formas de los modos y el amortiguamiento.
6

Las frecuencias naturales de un edificio son las frecuencias de sus oscilaciones libres.
Cuando la frecuencia de la fuente externa coincide con una de las frecuencias naturales, la
estructura (o una parte de la estructura) toma la forma del modo en que éste oscila
libremente en esa frecuencia.
En la figura 2.4 se muestra un modelo simplificado que se utiliza para estudiar las
oscilaciones transversales de un edificio de cuatro pisos. Se supone que la masa de cada
uno de los pisos, incluyendo las terminaciones, divisiones y vigas, y además las porciones
de columnas y muros que constituyen la mitad inferior y superior del nivel considerado se
encuentran concentrados en el centro de masa de la losa respectiva. Se supone que las
estructuras verticales pueden sufrir deformación transversal o de corte y que la losa es
infinitamente rígida en su plano. Las masas y los esfuerzos de corte son en general
diferentes en los diferentes pisos. En este modelo las masas m¡ solamente pueden tener
desplazamientos laterales. El sistema tiene cuatro grados de libertad. Las ecuaciones de
movimiento para las cuatro masas forman un sistema homogéneo de cuatro ecuaciones con
cuatro incógnitas. Este sistema homogéneo tiene solución solamente para cuatro valores de
la frecuencia, denominadas frecuencias naturales de oscilación. Para cada una de estas
frecuencias el sistema tiene una forma característica de vibración denominada modo. En la
figura 2.5 se muestran los tres primeros modos de oscilación del edificio de cuatro pisos.
Los modos se ordenan de acuerdo a valores crecientes de la frecuencia.
Cuando sobre el edificio actúa una fuente externa que varía sinusoidalmente con una
frecuencia próxima a una de las frecuencias naturales de oscilación de la estructura,
sabemos que entra en resonancia, el cual debe ser evitado para que la estructura no sufra
daños.·
7

M4
M3
M2
Ml
Fig.2.4
Modelo de un edificio de 4 pisos que soporta solamente esfuerzos de corte. Además indicamos el grado de desplazamiento lateral de cada piso con las flechas.
modo 1 ti
Fig.2.5
··.\· .. ·· ...
\ .....
---1 ---1
..... ·· .·• .·
... ···
modo2 f2
modo3 13
En esta figura mostramos La formas de oscilación de los tres primeros modos de oscilación de un edificio de cuatro pisos.
8

El amortiguamiento es siempre bueno en los edificios y en cualquier estructura porque
reducen la amplitud de la vibración. El amortiguamiento es un fenómeno asociado con la
fricción y las micro-fracturas internas que no es simple de estimarlo a priori. Los valores
que se le asigna al amortiguamiento en estos modelos son aproximados y están
generalmente basados en mediciones experimentales en los edificios. Las estructuras
modernas tienen en general menos amortiguamiento que las estructuras antiguas. Esto se
debe a los revestimientos más livianos, losas de mayor tamaño, menos particiones, etc.
Todas las estructuras tienen un amortiguamiento propio, pero hay dispositivos que
incrementan el amortiguamiento disipando energía cuando la estructura se mueve.
La amortiguación que normalmente existe en una estructura es relativamente pequeña y
prácticamente no afecta al cálculo de las frecuencias naturales y de los modos normales.
Por lo tanto, el efecto de la amortiguación se desprecia, cuando se determinan las
frecuencias naturales y los modos normales de sistemas estructurales.
En consecuencia, en la práctica, el problema característico de una estructura amortiguada
se resuelve omitiendo la amortiguación y usando los mismos métodos empleados en las
estructuras sin amortiguación.
2.3 Modelo sencillo de fenómeno de resonancia
Mostremos un modelo sencillo de fenómeno de resonancia, para ello consideremos
un edificio de un solo piso de tal manera que es excitada con una fuerza armónica
Las estructuras, en muchos casos, están sujetas a la acción de maquinarias en rotación, que
producen excitaciones armónicas debido a la presencia inevitable de masas excéntricas en
las partes rotantes. Además, aun en aquellos casos en que la excitación no es armónica, la
respuesta de la estructura puede obtenerse mediante el método de Fourier.
9
Loza
_J_J__j_L_)_)l_¡_ur-. F
a)
Fig.2.6.
b)
u
e) d)
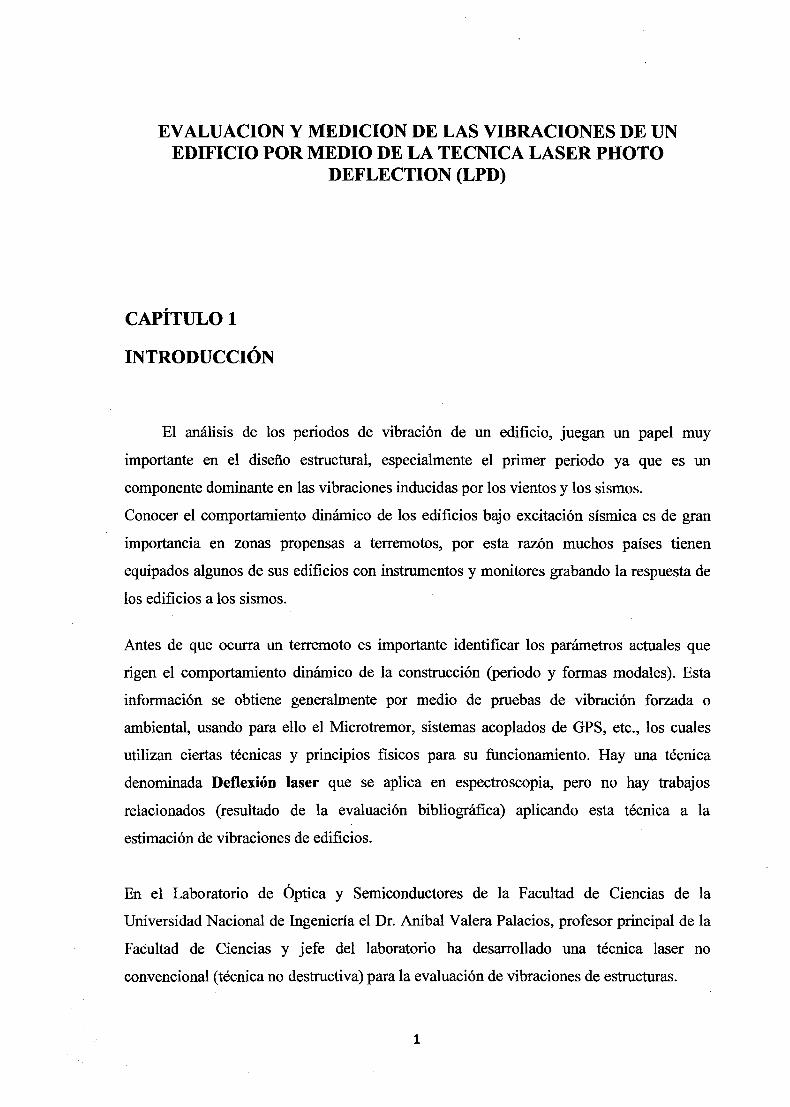
Estamos considerando la loza muy rígida de tal manera que no experimenta deformación y además estamos considerando que toda la masa está concentrada en la loza. (a) Edificio de un piso (b) Toda la masa concentrada en la loza. (e) y ( d) Modelos equivalentes del edificio.
La fuera F(t) aplicada al oscilador de la figura 6 (d) es armónica y está dada por:
F(t) = F0 sen(fit) (2.1)
Donde F0 es la amplitud y O la frecuencia de la fuerza excitadora. La ecuación
diferencial que se obtiene aplicando las leyes del movimiento de Newton es:
mü + ku = F(t) (2.2)
Donde "m" es la masa, "k" la constante elástica, "F" la fuerza excitadora y "u" el
desplazamiento o la solución de la ecuación diferencial, es lo que denominamos la
respuesta del sistema.
10

Para resolver la ecuación diferencial se puede recumr al método de variación de
parámetros o al de coeficientes indeterminados. Aplicando el método de coeficientes
indeterminados tenemos:
(2.3)
Donde uhes la solución homogénea y Up la solución particular.
Si las condiciones iniciales en el instante t = O se toman iguales a cero, es decir el
desplazamiento inicial cero y la velocidad inicial cero, resolviendo se tiene [4]
u(t) = Fo [ 1.a ] [sin nt- (n) sin wt]
k 1-(-)2 .w w
(2.4)
En la ecuación 2.4 se puede ver que la respuesta viene dada por la superposición de dos
términos armónicos de frecuencias diferentes. Por lo tanto, el movimiento resultante no es
armónico, ver figura 2. 7. Se puede observar también, en la ecuación 4 que cuando la
frecuencia forzada O. es igual a la frecuencia natural ''w" la amplitud del movimiento
tiende a amentar infinitamente. Un sistema que actúa bajo una excitación externa con una
frecuencia forzada O. que coincide con la frecuencia natural ''w" se dice que está en
resonancia. En estas circunstancias, la amplitud aumenta gradualmente hacia el infinito,
ver figura 2.8.
11

Sin embargo, los materiales comúnmente usados en la práctica están sujetos a límites de
resistencia y los fallos estructurales ocurrirán mucho antes de que las amplitudes puedan
alcanzar valores extremadamente altos. [ 4]
•
Fig.2.7
-Fuente excitadora.
-
- -- ..
Respuesta del
•
-Si la fuente excitadora tiene una frecuencia 0=2.5 Hz y la frecuencia del sistema es w=5 Hz, entonces no hay resonancia. Note que, en la respuesta del sistema existe un máximo desplazamiento. Note también que la respuesta ya no es armónica.
12

Respuesta del
sistema.
7.1lol
-7.1'1'1-
excitadora
-wlll
Fig. 2.8
Ahora si la fuente excitadora tiene una frecuencia 0=4.9 Hz y como la frecuencia del sistema es w=5 Hz, entonces estamos cerca de la resonancia ya que el valor de 0=4.9 Hz es próximo al valor de w=5 Hz. Note como la amplitud de la respuesta del sistema aumenta conforme transcurre el tiempo, debido a que el sistema está casi en resonancia.
En la situación anterior hemos analizado y obtenido la respuesta dinámica para una
estructura modelada como un sistema de un solo grado de libertad. El modelo con un solo
grado de libertad provee la respuesta dinámica exacta solamente cuando la estructura
puede asumir, durante su movimiento, una forma única de desplazamiento. En caso
contrario, cuando la estructura puede desplazarse en más de una forma durante su
desplazamiento, la solución que se obtiene con un modelo con un grado de libertad será
solamente una aproximación al verdadero comportamiento dinámico.
13
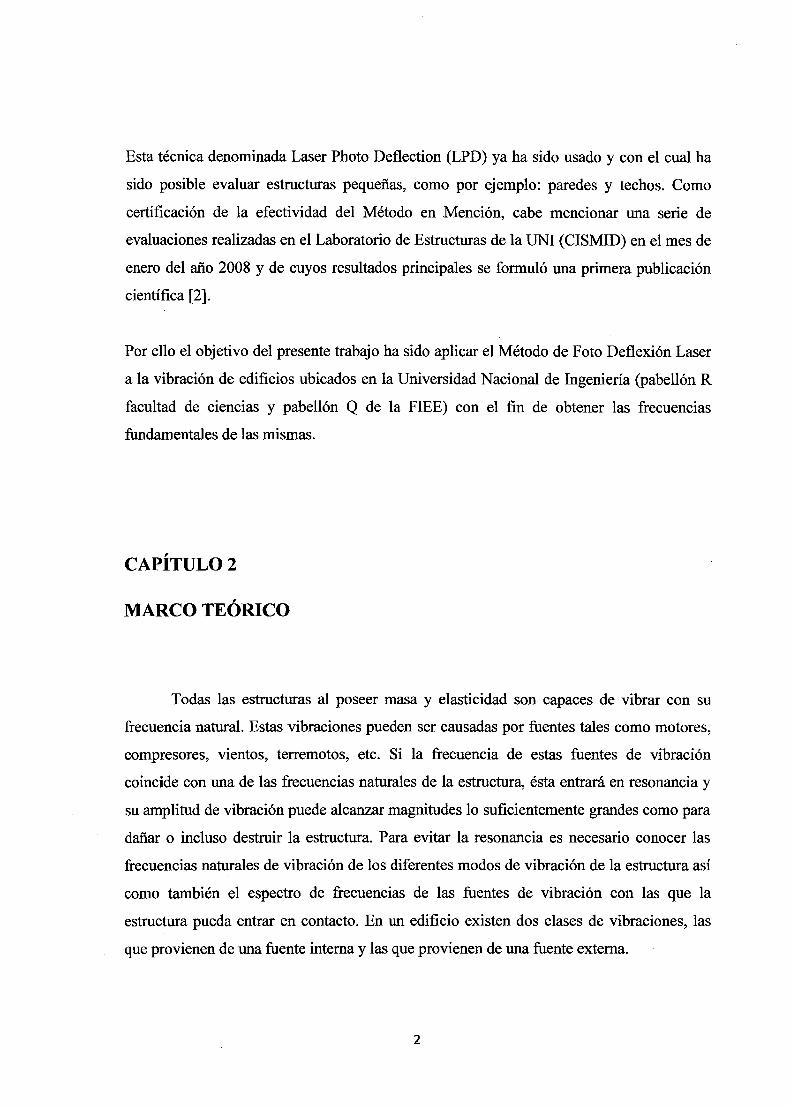
Las estructuras no siempre pueden describirse dinámicamente empleando un modelo con
un solo grado de libertad y, en general, es necesario modelar las estructuras como sistemas
de múltiples grados de libertad, cada uno correspondiente a una coordenada independiente.
Consideremos un modelo tipo cortante de n grados de libertad, como muestra la figura 2.9
F,. ... ¡:::::::::::::::::::::::::::::: mn 1 1 1
::::::::::::::::::::::::::::::
............... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
F.--~=· ·=·=·=·=· =· =· ·=·=·=·=· =· j· ............... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 .............. .
Fig.2.9
Edificio de n grados de libertad.
($----. F,. 1 1 1 1
kn: 1
Haciendo diagrama de cuerpo libre de cada masa y aplicando las leyes de la mecánica, la
correspondiente ecuación puede escribirse matricialmente como:
MÜ+KU=F (2.5)
Donde M es la matriz de masa del sistema, K la matriz de rigidez y F es el vector de
fuerzas aplicadas.
14

U y Ü los vectores de desplazamiento y aceleración respectivamente.
Es útil estudiar el comportamiento de un sistema sin amortiguamiento cuando está
sometido a una perturbación inicial. Las ecuaciones del movimiento son:
MÜ +KU =O (2.6)
Donde "O" representa un vector con n componentes, todas ellas cero.
Las condiciones iniciales son:
U(O) = U0 y Ü(O) = Uo
Si el movimiento es armónico, U tendrá la siguiente forma:
U= Xsen(wt + l/J) (2.7)
Luego la ecuación 6 se transforma en:
(2.8)
El problema es determinar si es que hay valores de w 2 y vectores correspondientes X que
satisfacen esta ecuación matricial, además de la solución trivial w = O, X= O [5]
La ecuación anterior permite obtener las frecuencias naturales de la estructura.
15

Un sistema de n grados de libertad tendrá por consiguiente n frecuencias naturales y n
formas modales o modos asociados.
2.4 Transformada de Fourier.
Las oscilaciones que se dan en nuestro entorno son anarmónicas es decir no se
representan exactamente mediante funciones senos o cosenos. Las ondas puras no tienen
existencia fisica en la práctica, este hecho enfatiza el significado práctico de las
perturbaciones anarmónicas.
2.4.1 Series de Fourier
El fisico francés Jean-Baptiste Joseph Fourier demostró que una función
anarmónica f(x) de periodo espacial 'A se puede representar sumando funciones armónicas
(senos o cosenos) de diferente frecuencia y amplitud es decir se puede representar por una
serie a la que se denomina serie de Fourier.
Matemáticamente
A f(x) = 2°+L~=1(Amcosmkx+Bmsenmkx)
Donde k 2rr
A.
(2.9)
Ahora el . proceso de determinación de los coeficientes A0 , Am y Bm para una función
periódica específica f(x) recibe el nombre de análisis de Fourier.
Si conocemos f(x) entonces los coeficientes están dados por:
z¡A. A 0 =A
0 f(x)dx
16

zJA. Am = .ít 0
f (x) cosmkxdx
2 rA. Bm =¡Jo f(x)senmkxdx
Ejemplo
Veamos la serie de Fourier que corresponde a una onda cuadrada
{
+1 cuando f(x) =
-1 cuando ~<x<~} -<x<.ít 2
(2.10)
(2.11)
2 Se verifica que Am = o y Bm =- (1- cosmn) por lo que los coeficientes de
TC
Fourier son: ..
4 4 4 B1 = -, B2 = O , B3 = -, B4 = O , B5 = - .............. .
TC 3TC Src
La serie adquiere, considerando A.=2n (A. es el periodo espacial de la onda cuadrada) la
siguiente forma:
4{ 1 1 } f(x) =- sen(x) + -sen(3x) + -sen(Sx) + ... TC 3 5
(2.12)
17
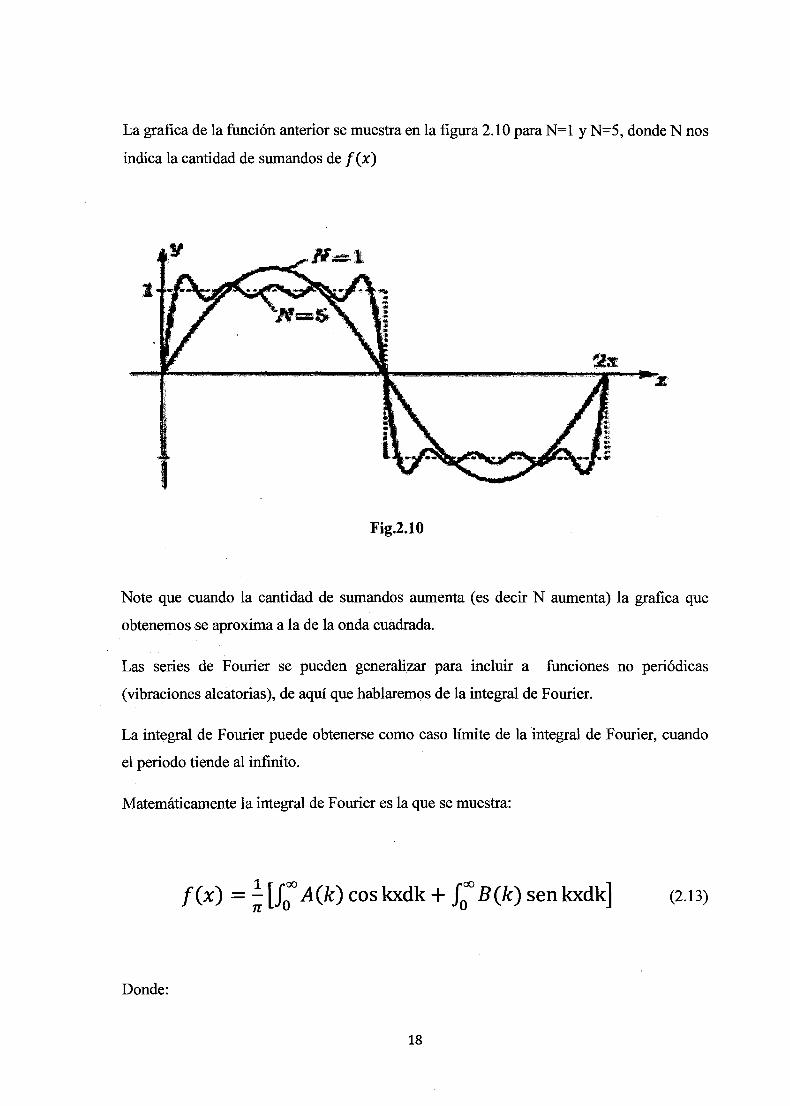
La grafica de la función anterior se muestra en la figura 2.1 O para N= 1 y N=S, donde N nos
indica la cantidad de sumandos de f(x)
Fig.2.10
Note .que cuando la cantidad de sumandos aumenta (es decir N aumenta) la grafica que
obtenemos se aproxima a la de la onda cuadrada.
Las series de Fourier se pueden generalizar para incluir a funciones no periódicas
(vibraciones aleatorias), de aquí que hablaremos de la integral de Fourier.
La integral de Fourier puede obtenerse como caso límite de la integral de Fourier, cuando
el periodo tiende al infinito.
Matemáticamente la integral de F ourier es la que se muestra:
f(x) =: [J0
00
A(k) cos kxdk + f0
00
B(k) sen kxdk] (2.13)
Donde:
18

A(k) . [}cx)coskxdx
B(k) = J:f(x) senkxdx (2.14)
Las cantidades A(k) y B(k) se interpretan como las amplitudes de las contribuciones seno
y coseno en el rango de la frecuencia espacial angular entre k y k + dk.
Generalmente se dice que A(k) y B(k) son las transformadas seno y coseno de Fourier,
respectivamente.
La integral de Fourier se puede representar también de manera compleja.
Matemáticamente
f(x) = :n J:F(k)e-íkx dk (2.15)
Siempre que:
F(k) = J:f(x)eikx dx (2.16)
Se dice que F(k) es la transformada de Fourier de f(x).
Si hacemos el cambio de x por el tiempo t y k por la frecuencia v entonces las expresiones
quedan como:
1 Joo · t f(t) = Zn _00
F(v)e-tv dv (2.17)
F(v) = J:f(t)eivt dt (2.18)
19

Fig. 2.11
1,0
0,5
....... 0,0
~
Q) "O
::::>
"" o. E <
-0,5
-1,0
o
1,0
0,8
0,6
0,4
0,2
2
tiempo(t)
(a)
3 4
0,0 +-~...--r--'f-,--,-~--.~--.-~-,-~r--.---,~--,-~-.--~--r-....----l 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
Frequency (Hz)
(b)
(a) Señal armónica f(t) cuya frecuencia es 1Hz. (b) Transformada de Fourier de f(t), y como f(t) es una señal armónica obtendremos su única frecuencia, el cual es indicado por el pico. Note que el pico se da a la frecuencia de 1Hz.
20
-~ O)
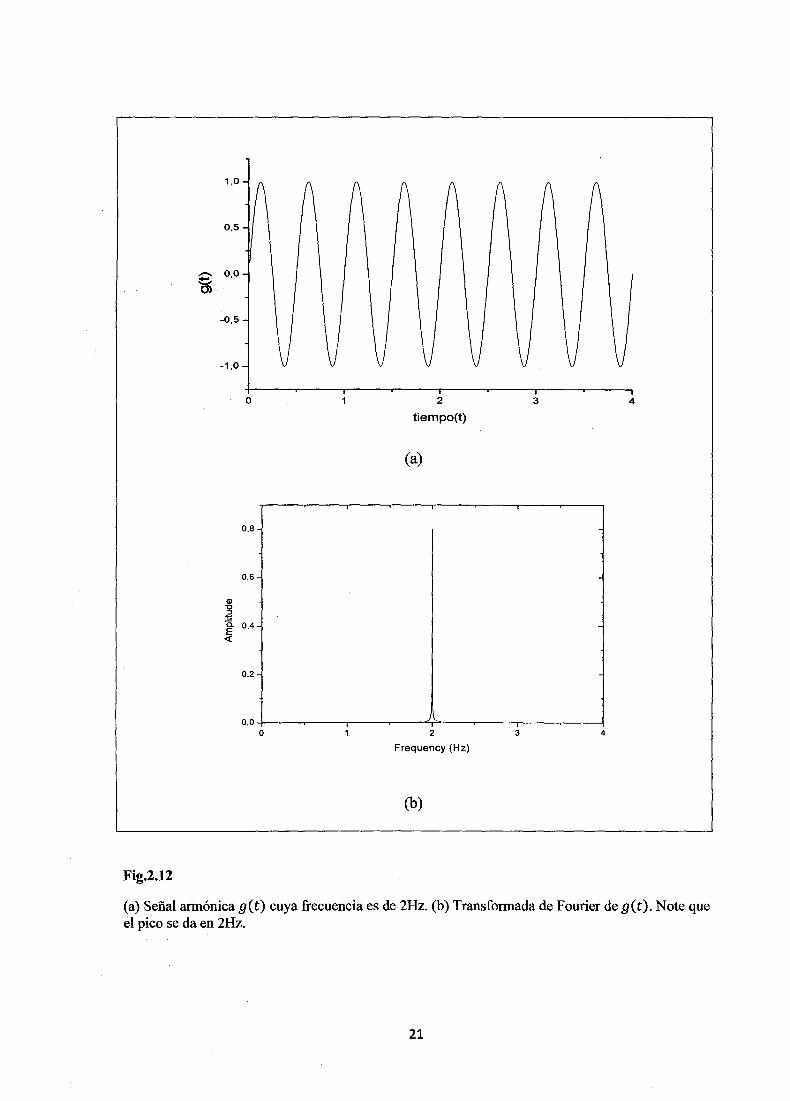
Fig.2.12
1,0
0,5
0,0
-0,5
-1,0
o
0,8
0,6
G)
~ a. 0,4
~
0,2
2
tiempo(t)
(a)
3
0,0 +----,.-------,----.------',,"'--~--.---.-------t o 2
Frequency (Hz)
(b)
3 4
4
(a) Señal armónica g(t) cuya frecuencia es de 2Hz. (b) Transformada de Fourier de g(t). Note que el pico se da en 2Hz.
21

2,0
1,5
1,0
0,5
z:-~ 0,0
+ z:-~ -0,5
-1,0
-1,5
-2,0 o 2 4 6 8 10
tiempo (t)
(a)
1,0
0,8
0,6 Q) "C :::1
"" a. E 0,4 <(
0,2
0,0 o 2 3 4
Frequency (Hz)
(b)
fig.2.13
(a) Mostramos una señal anarmónica que es la suma de las dos anteriores es decir: h(t) = f(t) + g(t). (b) Transformada de Fourier de h(t), note que se obtienen los picos correspondientes a 1Hz y 2Hz.
22

Note que del dominio del tiempo pasamos al dominio de las frecuencias, el cual es muy
útil si es que deseamos las frecuencias de determinadas señales. Las señales aquí mostradas
fueron elaboradas en el programa ORIGIN
Veamos algunos ejemplos para indicar que es lo que hace la transformada de Fourier
Nota.
Como hemos visto la transformada de Fourier es una operación matemática que convierte
una señal o función en el dominio de una determinada variable o variables (el tiempo, el
espacio .... etc.) al dominio de la frecuencia. Dependiendo del caso se hablará de frecuencia
temporal, espacial, ...... etc.
No es, una función que altere la señal, sino que simplemente nos la muestra en un nuevo
dominio.
La transformada de Fourier surgió como una operación sobre funciones o señales continuas
(analógicas), involucrando integrales que no siempre pueden resolverse con facilidad. Sin
embargo, con la digitalización de las señales analógicas, la aplicación de la transformada
de Fourier se simplifico enormemente estando sólo limitado por la velocidad de cálculo de
la computadora y la complejidad de la señal digitalizada.
Surge así la transformada discreta de Fourier, el cual para calcularla se usa ciertos
algoritmos optimizados que permiten la operación en un menor tiempo, por lo que se habla
de transformada rápida de Fourier (FFT).
De hoy en adelante nos referiremos a la FFT, ya que el programa ORIGIN lo calcula de
esta manera.
23

CAPÍTUL03
PARTE EXPERIMENTAL.
3.1 Evaluación de las señales
Las evaluaciones se realizaron usando dos programas, el NERO-W A VE EDITOR
4 y EL ORIGIN 6.0, ahora para realizar las evaluaciones de manera sistemática hemos
tenido que realizar algunas definiciones.
Veamos:
3.1.1 Señal: Es el nombre del archivo donde se guarda la señal obtenida del detector
LPD.
3.1.2 Tiempo de grabación de la señal: Es el tiempo que se empleo en grabar la señal
del detector (LPD) a la computadora con el programa NERO-WAVE EDITOR.
3.1.3 Muestra: Es aquella parte de la señal que seleccionamos para su análisis.
24

La reglon sombreada Indica una muestra de diez segundos
~.Inicio 'tit"'rcro$ofr·offt.::e- ~ =· ··frr. ·,, E:c::-~ "'<,t"t)0".Jfo:2::.:::
Fig.3.1
Mostramos una señal en el NERO-W A VE EDITOR donde la región sombreada nos indica una muestra
3.1.4 Tamaño de muestra: Es el tiempo de grabación de la muestra. Por ejemplo en la
figura 7 se indica una muestra de 1 Oseg.
3.1.5 Tiempo de importación: Es el tiempo que se demora el programa ORIGIN en
importar una muestra del NERO-W A VE EDITOR
3.1.6 Tiempo de FFT: Es el tiempo que se demora el programa ORIGIN en realizar la
transformada rápida de F ourier (FFT) de una determinada muestra.
3.1.7 Espectro: Es la gráfica que muestra el programa ORIGIN luego de realizar la FFT
de una muestra.
3.1.8 Posición temporal: Es el instante de tiempo donde empieza una determinada
muestra.
25

Fig.3.2
Indicamos la posición temporal de la muestra como (02-49-20) que significa 2 horas con 49 minutos y 20 segundos.
3.2 El sistema LPD (Laser Photo Deflection)
La figura 6 muestra el sistema LPD (Laser Photo deflection) aplicada a la
generación y detección de vibraciones estructurales.
26
Pared
Espejo ~~ "'
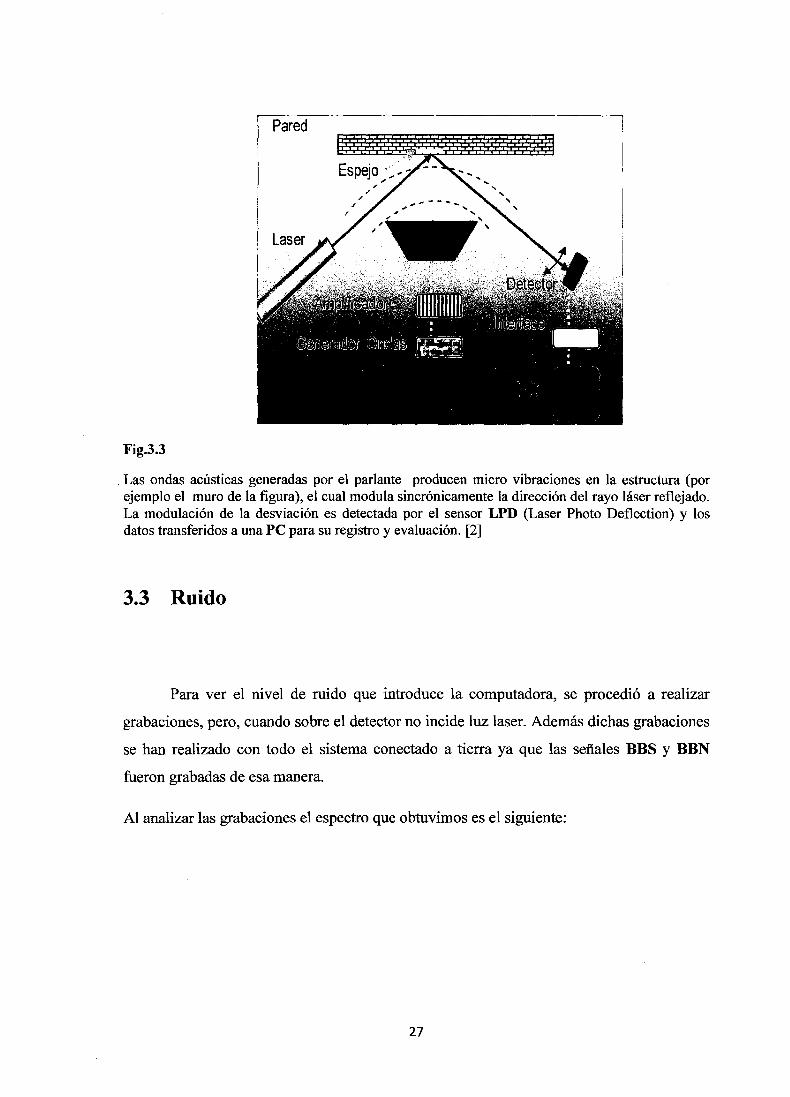
Fig.3.3
, Las ondas acústicas generadas por el parlante producen micro vibraciones en la estructura (por ejemplo el muro de la figura), el cual modula sincrónicamente la dirección del rayo láser reflejado. La modulación de la desviación es detectada por el sensor LPD (Laser Photo Deflection) y los datos transferidos a una PC para su registro y evaluación. [2]
3.3 Ruido
Para ver el nivel de ruido que introduce la computadora, se procedió a realizar
grabaciones, pero, cuando sobre el detector no incide luz laser. Además dichas grabaciones
se han realizado con todo el sistema conectado a tierra ya que las señales BBS y BBN
fueron grabadas de esa manera.
Al analizar las grabaciones el espectro que obtuvimos es el siguiente:
27
180 1 1 1 1
CX)
160- o o -«>
140 -
120 -
Q) 100 -"O :::J
:!:::: o. 80 E <(
60
X X X 40 X N (t') X X «> 11 11 v LO
11 11 1'- (t') 11 11
LO LO 20 N LO 1'- LO o LO CX)
~ CX) N o v ui CX) ...... N v r--.: ...... CX) cri LO 1'-
1 .J, .1 • .1 1 m o 1 1 1
o 20 40 60 80 100
Frequency {Hz)
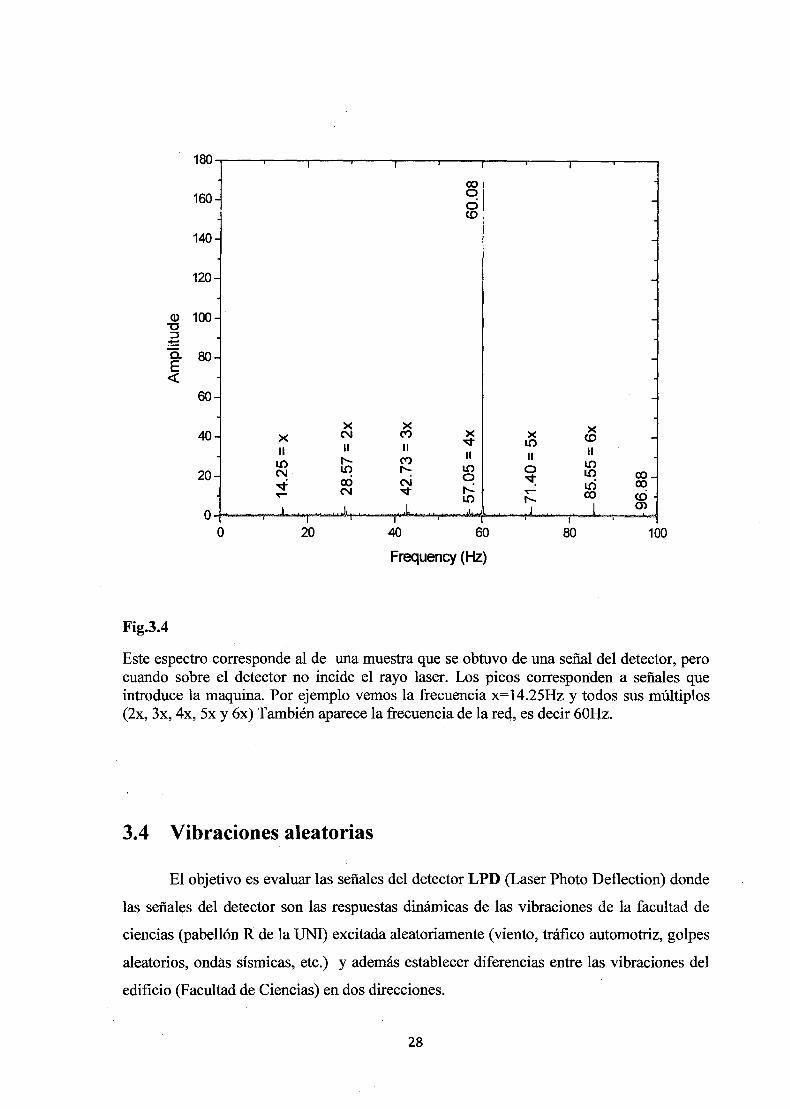
Fig.3.4
Este espectro corresponde al de una muestra que se obtuvo de una señal del detector, pero cuando sobre el detector no incide el rayo laser. Los picos corresponden a señales que introduce la maquina. Por ejemplo vemos la frecuencia x=14.25Hz y todos sus múltiplos (2x, 3x, 4x, 5x y 6x) También aparece la frecuencia de la req, es decir 60Hz.
3.4 Vibraciones aleatorias
El objetivo es evaluar las señales del detector LPD (Laser Photo Deflection) donde
las señales del detector son las respuestas dinámicas de las vibraciones de la facultad de
ciencias (pabellón R de la UNI) excitada aleatoriamente (viento, tráfico automotriz, golpes
aleatorios, ondas sísmicas, etc.) y además establecer diferencias entre las vibraciones del
edificio (Facultad de Ciencias) en dos direcciones.
28

Las direcciones son mutuamente perpendiculares, a las cuales hemos denominado BBS y
BBN (las siglas no significan nada, sólo, indican dos direcciones de oscilación del edificio)
3.4.1 Equipos utilizados
1 Un laser semi conductor
2 Un Detector LPD (Laser Photo Deflection)
3 UnaPc.
3.4.2 Procedimiento experimental
Se instaló ellaser semi conductor en la esquina superior del edificio y el detector en
la parte inferior de la misma. Luego se encendió la Pe para que empiece a grabar señales
del detector.
29
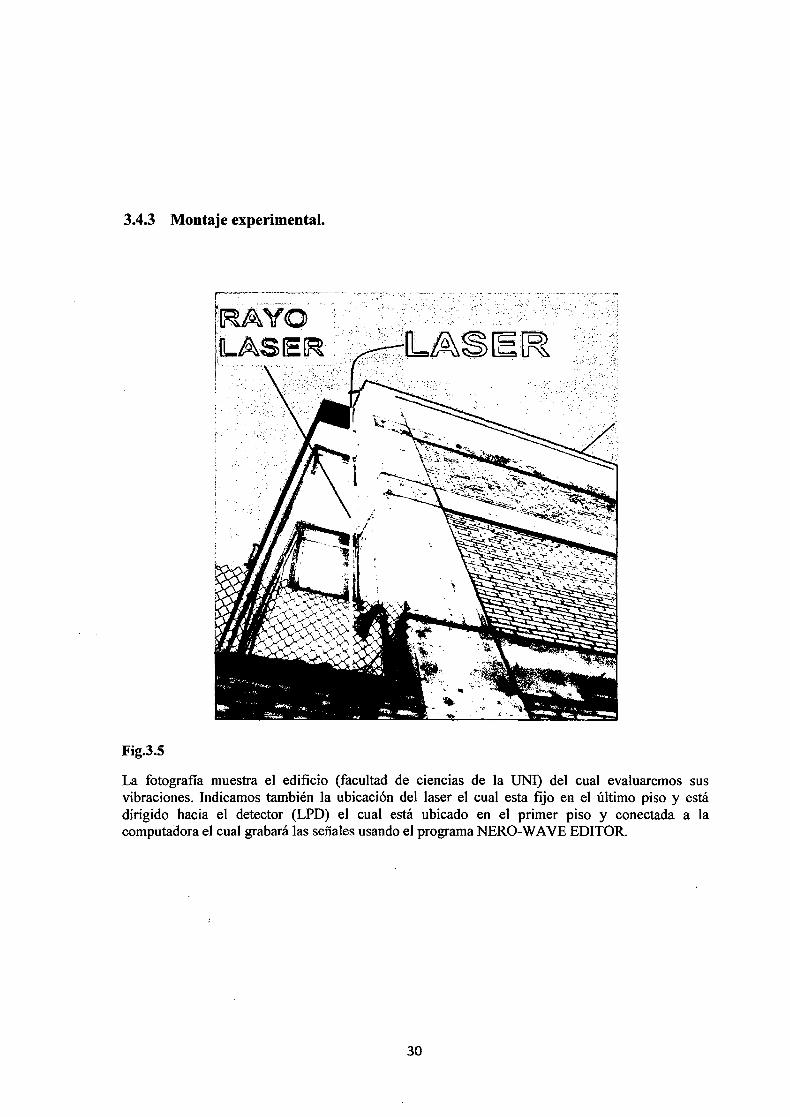
3.4.3 Montaje experimental.
Fig.3.5
¡AAVO~ , " fb.:~S!S~-'
--· ,,e·
·· .. _.·.;:.:-.
" .: . ': ~
La fotografia muestra el edificio (facultad de ciencias de la UNI) del cual evaluaremos sus vibraciones. Indicamos también la ubicación del laser el cual esta fijo en el último piso y está dirigido hacia el detector (LPD) el cual está ubicado en el primer piso y conectada a la computadora el cual grabará las señales usando el programa NERO-W A VE EDITOR.
30

Fig.3.6
, , ,
, , , ,
, , , ,
, , ,
Detector
(LPD)
Oscilación V
... ...
Oscilación X
{BBS)
El edificio tiene varios grados de libertad, pero nosotros hemos medido sólo en dos direcciones; el dibujo muestra las dos direcciones en las cuales hemos medido las vibraciones. Oscilaciones en la dirección "X" a la cual hemos denominado BBS y oscilaciones en la dirección "Y" a la cual hemos denominado BBN. También el dibujo nos muestra el montaje experimental que permitió analizar las vibraciones del edificio de cuatro pisos (pabellón Rlfacultad de ciencias de la UNI) las cuales, como se dijo, son originadas por viento, tráfico automotriz, golpes aleatorios, ondas sísmicas, etc. Las señales del detector LPD son grabadas en la computadora (PC) y posteriormente analizadas.
31
DlETIECüOR
(a)
k. ..
. ~
,. ·~ \
(b)
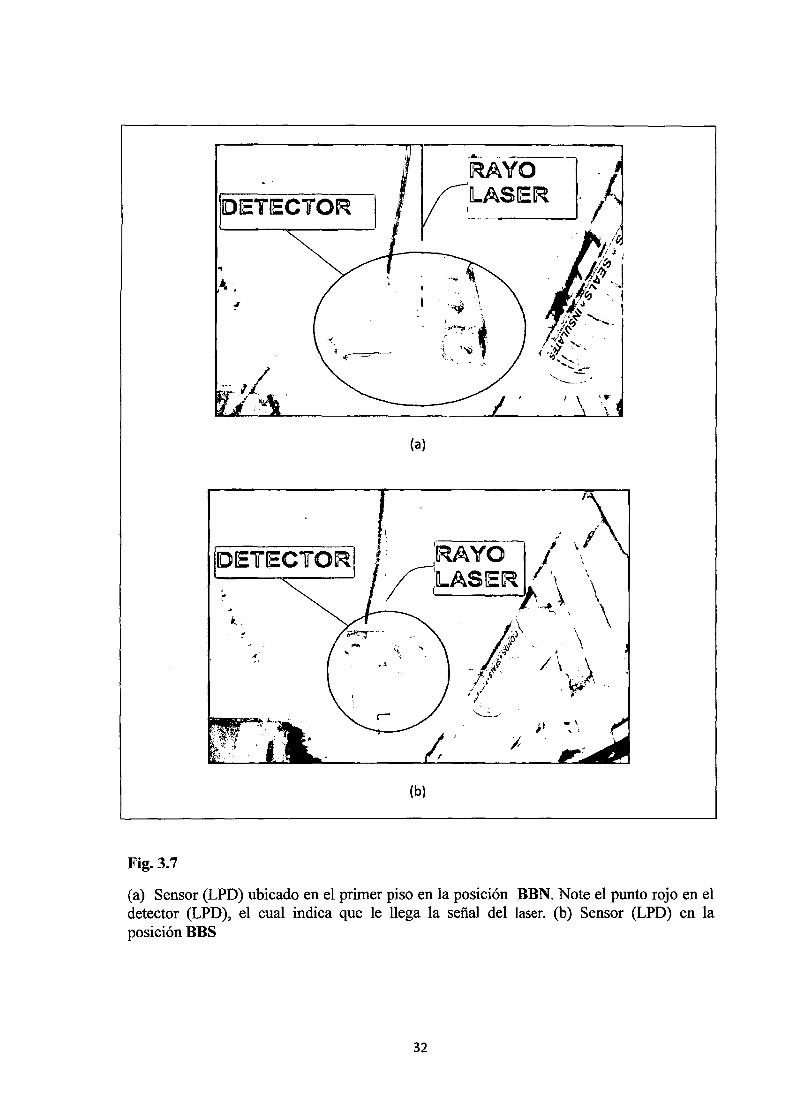
Fig. 3.7
(a) Sensor (LPD) ubicado en el primer piso en la posición BBN. Note el punto rojo en el detector (LPD), el cual indica que le llega la señal del laser. (b) Sensor (LPD) en la posición BBS
32
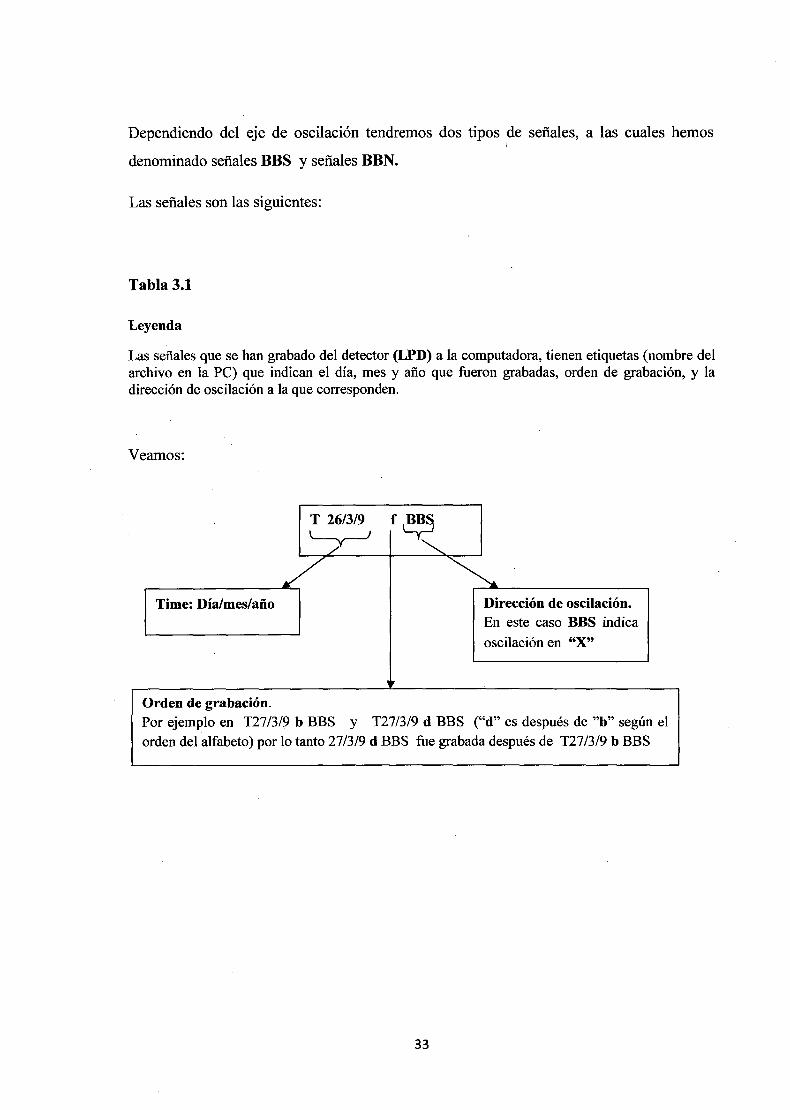
Dependiendo del eje de oscilación tendremos dos tipos de señales, a las cuales hemos \
denominado señales BBS y señales BBN.
Las señales son las siguientes:
Tabla 3.1
Leyenda
Las señales que se han grabado del detector (LPD) a la computadora, tienen etiquetas (nombre del archivo en la PC) que indican el día, mes y año que fueron grabadas, orden de grabación, y la dirección de oscilación a la que corresponden.
Veamos:
T 26/3/9 f~ ~·
/' '""-/ ~
Time: Día/mes/año Dirección de oscilación. En este caso BBS indica
oscilación en "X"
Orden de grabación. Por ejemplo en T27/3/9 b BBS y T27/3/9 d BBS ("d" es después de "b" según el orden del alfabeto) por lo tanto 27/3/9 d BBS fue grabada después de T27 /3/9 b BBS
33

SEÑAL BBS (señales que TIEMPO DE GRABACION corresponden a oscilaciones en X) (hora:minuto:segundo)
T26/3/9fBBS 00:08:22
T27 /3/9bBBS 02:30:05
T27 /3/9dBBS 01:19:43
T27 /3/9GBBS 00:36:44
T27 /3/9iBBS 00:53:13
T2/4/9dBBS 00:58:35
T2/4/9fBBS 00:27.45
T3/4/9cBBS 00:17.52
T3/4/9eBBS 01:05:43
T4/4/9bBBS 01:23:49
T4/4/9dBBS 01:23:27
T5/4/9hBBS 02:04:10
T7/4/9bBBS 01:28:59
T7/4/9hBBS 01:05:11
T7/4/9iBBS 00:29:21
T7/4/9jBBS 02:40:44
T7/4/91BBS 01:47:19
T13/4/9eBBS 01:39:16
T13/4/9fBBS 00:16:29
T13/4/9hBBS 02:07:18
T15/4/9eBBS 01:28:15
34

Tabla 3.2
SEÑAL BBN (señales que TIEMPO DE GRABACION corresponden a oscilaciones en Y) (hora:minuto:segundo)
T26/3/9eBBN 00:41:09
T26/3/9gBBN 00:54:53
T27 /3/9aBBN 00:11:49
T27 /3/9fBBN 00:12:08
T27 /3/9hBBN 00:10:36
T27 /3/9jBBN 03:06:24
T28/3/9dBBN 01:01:13
T5/4/9gBBN 00:11:18
T5/4/9iBBN 03:06:24
T2/4/9bBBN 01:34:54
T2/4/9cBBN 00:36:03
T2/4/9eBBN 02:12:34
T3/4/9bBBN 00:15:37
T3/4/9dBBN 01:37:01
T3/4/9fBBN 00:45:55
T3/4/9gBBN 00:20:50
T3/4/9hBBN 01:04:39
T3/4/9iBBN 00:52:59
T4/4/9cBBN 00:10:15
T4/4/9eBBN 01:21:31
T5/4/9jBBN 03:06:24
T5/4/9kBBN 03:06:24
T7/4/9kBBN 03:06:24
T13/4/9cBBN 03:06:24
T13/4/9dBBN 00:08:01
T13/4/9gBBN 00:15:17
35

Nuestro primer trabajo consistía en averiguar, que tamaño de muestra podía evaluar la
computadora, ya que mientras más grande es la muestra, los picos en el espectro quedan
mejor definido; esto lo sabemos, ya que se realizó un trabajo (tópicos de investigación U
medición de las vibraciones de una pared por el método de interferometría óptica) y se
demostró que la definición de los picos dependía del tamaño de la muestra y además de la
sensibilidad del detector. El tamaño de muestra máxima que podíamos evaluar en esa
oportunidad era 80seg.
Teniendo en cuenta lo anterior, seleccionamos muestras de diversos tamaños de las '
señales BBS y BBN y procedimos a evaluar.
36

Tabla3.3
Tamaño de muestra Tiempo de importación Tiempo de FFT (en segundos) (hora:minuto:segundo) (hora:minuto:segundo)
S 00:00:13 00:00:33 10 00:00:34 00:00:49 1S 00:01:07 Mas de 1Smin 20 00:01:S6 Mas de 13min 22 00:02:1S 00:01:S6 2S 00:03:00 00:01:S7 28 00:04:00 00:02:00 30 00:03:14 Mas de 20min 33 OO:OS:43 Mas de 1Smin 3S 00:06:27 Mas de 1Smin 40 00:09:03 Mas de 20min 43 Mas de 10min so Mas de 10min 60 Mas de 10min
70 Mas de 10min
80 Mas de 10min 8S Mas de Smin
90 Mas de Smin
9S Mas de Smin
100 Mas de Smin
110 Mas de Smin
120 Mas de Smin
130 Mas de Smin
140 Mas de Smin
1SO Mas de Smin
160 Mas de Smin
170 Mas de Smin
180 Mas de Smin
200 Mas de Smin
240 Mas de Smin
300 Mas de Smin
600 Mas de Smin
37

Nota:
Según la tabla 3 el tiempo máximo que la computadora puede evaluar es 28seg, además a
partir de la muestra de 43seg ya no medimos el tiempo de FFT ya que su tiempo de
importación no sabemos realmente cuanto es, sólo indicamos hasta cuanto tiempo hemos
esperado. Por ejemplo para la muestra de 43seg indicamos como tiempo de importación
(más de 10min) queriendo decir que hemos esperado 10 minutos a la computadora para
que termine de evaluar pero la maquina seguía evaluando y no se espero mas ya que un
tiempo de 1 O minutos es mucho para las evaluaciones.
Observación
Al analizar un determinado espectro vimos que el rango de frecuencia que obtuvimos es de
O a 24 000 Hz, pero decidimos evaluar de O a 1OOHz.
Con la intensión de mostrar que el detector, si mide las vibraciones del edificio,
mostraremos dos espectros, uno de día y otro de noche.
38

Fig.3.8
2-21-40: T2068h
80
70
60.11 60
50
Q) -o ::l 40 :!::: i5. E <( 30
20
10
o o 10 20 30 40 50 60 70 80 90 100
Frequency (Hz)
a) Espectro de una muestra que se obtuvo de una señal grabada de noche.
5000
4000
3500
Q) 3000 "C
=ª Ci. 2500 E <(
2000
1500
1000
500
02-18-28: T1349cBBN
15.27Hz
14.92Hz
o 5 1 o 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
Frequency (Hz)
b) Espectro de una muestra que se obtuvo de una señal grabada de día.
Mostramos estos espectros, con la intensión de ver que el detector LPD si mide las vibraciones del edificio. a) Como de noche no hay mucho tráfico automotriz ni tampoco mucha corriente de aire, entonces el edificio vibra poco por lo que predomina la frecuencia de la red (aprox. 60Hz) b) sin embargo de día hay más tráfico automotriz y si es un día soleado, habrá corrientes de aire, los cuales harán que el edificio vibre, haciendo que la frecuencia de la red disminuya en amplitud.
39

3.4.4 Espectros del pabellón R.
500
450
400
350
300 Q)
"O ::J 250 ~
0.. E 200 <(
150
100
50
o
Fig.3.9
o
T27/3/9J BBN:02-49-20 15.83Hz
13Hz
59. 78Hz
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
Frequency (Hz)
En esta figura mostramos el espectro de una muestra que se obtuvo de la señal T27 /3/9j BBN y cuya posición temporal es 02-49-20, además se han colocado las frecuencias de los picos que se obtuvieron. Si queremos obtener este espectro, solo basta evaluar en el ORIGIN la muestra de 28 s cuya posición temporal nos indican. Note también que el pico que representa a la frecuencia de la red (pico aproximadamente de 60Hz) es pequeña comparada con los otros picos.
40

00:1343-T134B:ffi\J
N I r--C\1 LO T"'"
11 N >< I
T"'"
C\1 -q--q-T"'"
11 Q) ~
"'O T"'"
::J :!: N o. I E T"'"
<( <O LO -q- N
N N 11 I I>< o I ro M N
N m I T"'" N I -q- (X) -q- (Ó I LO o C\1 (X) r-- M <O -q- 11 M M 11 o >< (X) 11 ~ <O LO C\1 >< M 11
11 C\1 >< ~ -q-
C\1
o~~~~~~~~~~~~~~~~~~--~~~
o 5 10 15 21 25 3J 35 40 45 ro ffi oo ffi 70 75 ro ffi oo g> 100
Fig.3.10
Note en este espectro (BBN) que hay frecuencias que son múltiplos de una fundamental. Por ejemplo el pico lx=15.27Hz tiene sus múltiplos 2x, 3x. 4x, 5x y 6x así como el pico ly=14.42Hz tiene sus múltiplos 2y, 3y.
41
a. E <(
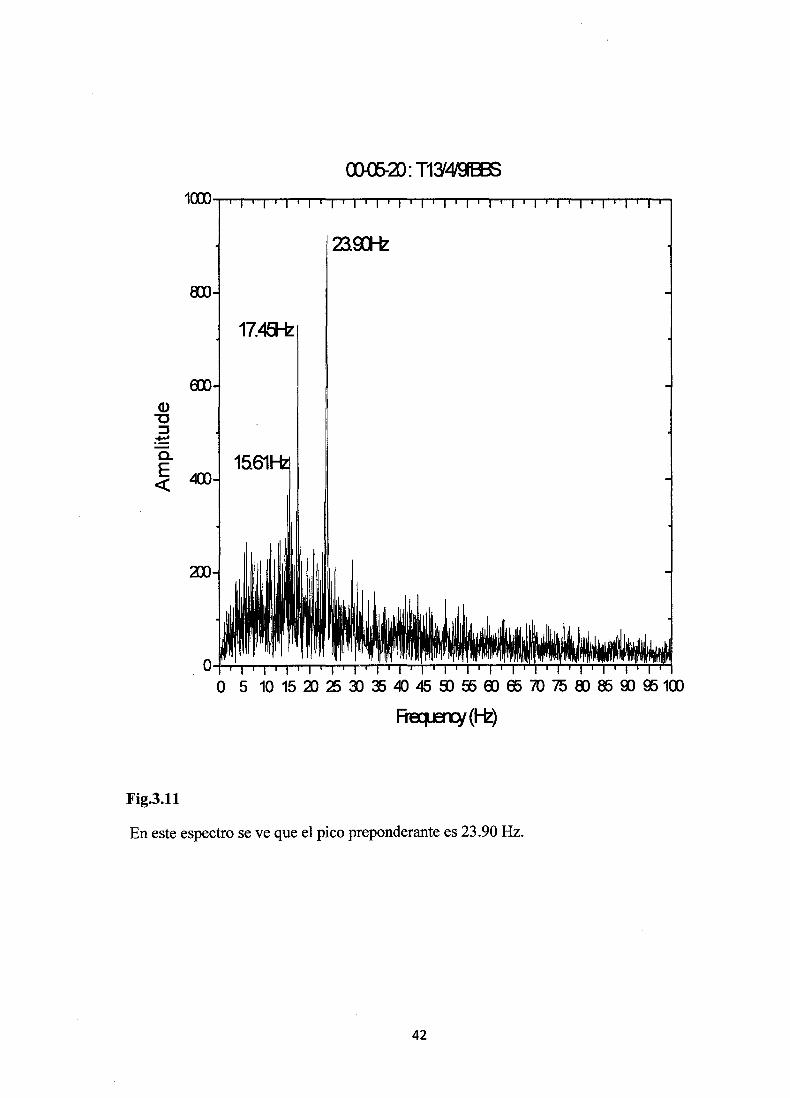
Fig.3.11
17.45-lz
~(Hz)
En este espectro se ve que el pico preponderante es 23.90 Hz.
42

1-3>53: 17~Effi
1fflD
Fig.3.12
En este espectro que corresponde al BBS también existen picos que son múltiplos de otros.
43
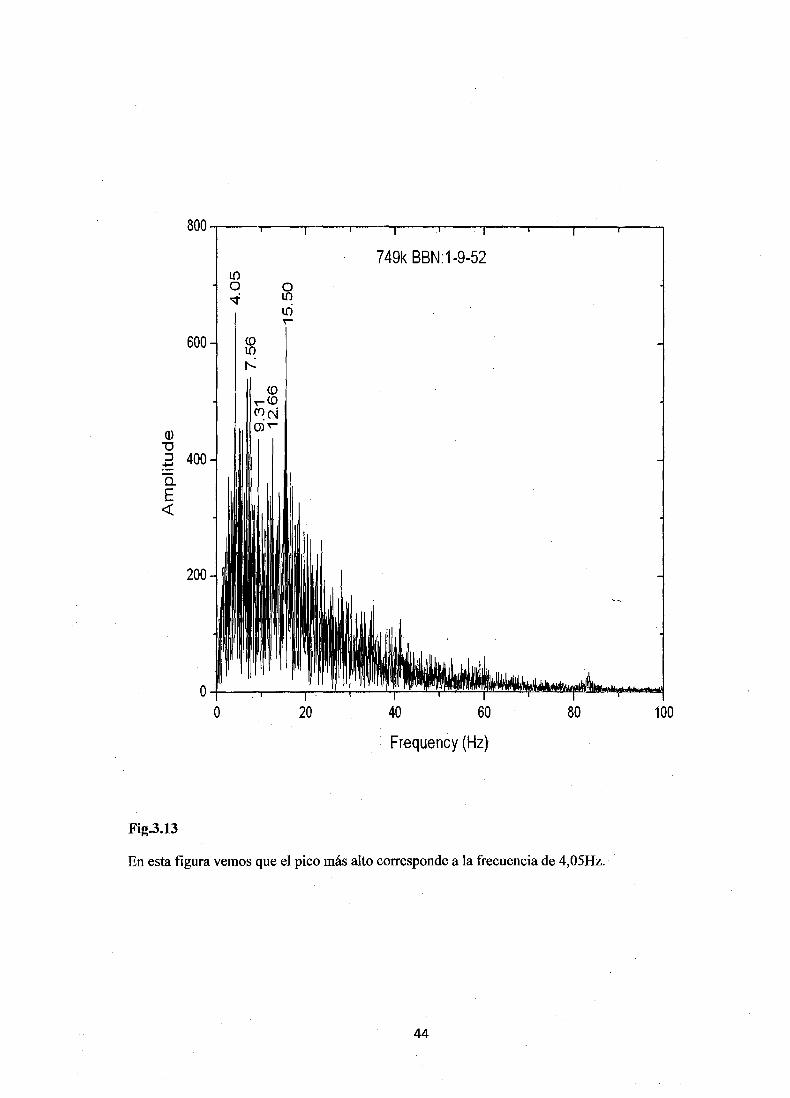
800
7 49k BBN: 1-9-52 LO o o ._r l.{)
L(j T""
600 <O LO 1'--
<O r<D ~N
OJ (j)T""
"' :::J 400 ~
0.. E <(
200
0~--~~~~~~~~~~~~~~~~
o 20 40 60 80 100
Frequency (Hz)
Fig.3.13
En esta figura vemos que el pico más alto corresponde a la frecuencia de 4,05Hz.
44
400
300
o. E 200 <(
100
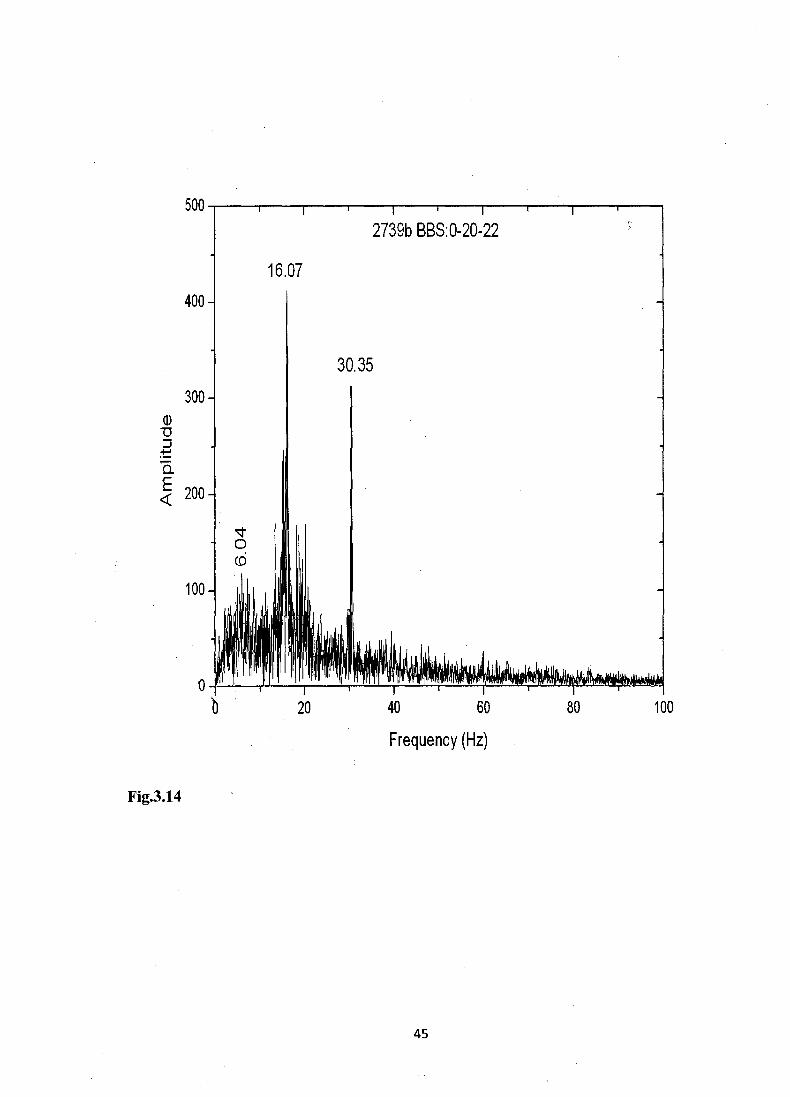
2739b BBS:0-20-22
16.07
30.35
o U~~~~~~~~-~~~-.. b 20 40 60 80 100
Frequency (Hz)
Fig.3.14
45

300
"\t 2639f BBS:0-4-40 o (O
(O ..,..
1'-O)
200 ('1'") ('1'")
l.()
Q) CX)
"'O (O
:::::¡ o :!: ('1'")
Q. N E ..,.. <( d
C\1 100
l.() C\1 "\t CX)
o 20 40 60 80 100
Frequency (Hz)
Fig.3.15
Ahora para diferenciar una señal BBS de una señal BBN realizaremos graficas de
espectros versus frecuencia y así tener una idea, de que frecuencias salen para cada
espectro.
46

oan '-u Q) c.. CJ) Q)
Fig.3.16
100
a:B lil artírw
.. ~ .. ~;· :· .. l.: ... . 1 • •
'¡1' •
. .. ,
• • •• • • • • • • • • •• . . , .. . : ·¡· . .
• t' ., ••. . .. • 1 .
.• ~ta •• .. . ~~··: . . .
.
. . . ;:. , . .. . . ,•
. . . .
. . 1
••
• 1
'
1 1
..
l f.
. .f : ' ' '
. .
1• .
. . . .. . . . ..
. .
05ID~~~~~~~ffiffi00ffi~~ffiffi00~~
fimHda(~)
Esta grafica nos indica que frecuencias están presentes en cada espectro conforme transcurre el tiempo, ya que los espectros son el resultado de evaluar muestras de diversos días. Por ejemplo podemos apreciar que hay ruidos que no están presentes en todos los espectros, mientras que otros, como la frecuencia de la red de aproximadamente 60Hz, si están presentes. Además se ve que las frecuencias que se obtienen en casi todos los espectros están entre 15 y 16Hz, Esto lo podemos apreciar ya que existe casi un continuo en este rango.
47

600
550
500
450
400
350 o ..__
......... 300 (.)
<1> 0... 250 en <1>
200
150
100
50
Fig.3.17
·: . . . .
BBN (oscilación en Y) Ruido
. ..
. • !.·.· '• '
. . . . . . .. ·t. . ... . ·:. '•'t .: .. · : .. \ ••• • '(: • :. ::~ .. : .¡ t-f• .... •• . . ,. . . . ... '.. \ .. -,: . . . . .. . .. . . .. ¡-.· . . . ... ,. ,,, ....... . ~., .... ·.: .. · .... ~, .. · ,, .. ,, . . .. .. . . : . l-¡:.t ... ( . ~ •• • • 1 • . ... . . . . . · ....
. :, \ ~ .... i..:; ., · .. '. . .... , . , ... ~,'"··'-" .. ~ .. 1:. :·,-..... .,. ·~·--· ... ~··l '··=-'
''•'' '•''1 ••• .' ... ·1. 1 ·.j· .. ·:·
.J 1 1
11•
..
··~'-··.e.-········:·, ... .. ,, • ,¡ • • •• '• •• ~ •• •• ' ... 1. 1 ••• ~ •••• •-¡•' .. ... , -.. • ••• ·'. '.:tr'•l A·,.r,''1, 14· .. '::•tt.\'~~,.e~ .. ( 1 ••• f:. ·.·· ..... ~ ~:· ,.;:' .. :· :. .
·... ·~· • • •• • • J • •'. ., •• J: • . . . . ..
JI>·· . .
•• • • •
. .
o 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
frecuencia (Hz)
En esta grafica podemos apreciar también que las frecuencias que están presentes en casi todos los
espectros están entre 15 y 16Hz.
48

A continuación realizaremos los mismo que lo anterior pero para las frecuencias cuya
amplitud relativa o nivel es máxima.
(/) o E
300-
250-
• • 1 •
• ....
, ,,
BBS max (oscilación en X)
Ruido
•
·x 2oo-J •• • . . f •
• • ·ro E (/) o
.Q c.. Q)
"' e o Q) c.. (/) Q)
Fig.3.18
150- . . t 100-
50-
• ••
• •
•• ••
J
• l
·t ~t.
O 1 1 1 1 1 .. 1 1 1 1 1 1 1 1 1 r ' -, --. T 1
o 5 1 o 15 20 25 30 35 40 45 .50 55 60 65 70 75 80 85 90 95 100
frecuencia (Hz)
En esta figura se ve que para los picos máximos también existe un casi continuo entre 15 y 16Hz, es decir, estos picos máximos están presentes en casi todos los espectros evaluados, note también que entre O y 15Hz existen pocos picos máximos.
49

BBN max (oscilación en Y)
600-••
~- "1 • • 500- ¡..~·~ •
(/) 1f:'· o . ' E ... , :: Ruido ·x 400-·m • • 1 E • • (/) • • i • ' o 300- • • o •••• • ·a. •'- ~ • • Q)
.. ~ "'' • o 200- • •• • '--o Q) a. 100-(/) Q) • • • • •• •
0- • • • •
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 l 1 -, 1
o 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95100
frecuencia (Hz)
Fig.3.19
En esta figura vemos también que las frecuencias entre 15 y 16Hz están presentes casi en todos los espectros , pero note en este caso a diferencia de la grafica 3 .18, que entre O y 15Hz existen mayor cantidad de picos máximos.
Ahora con la intención de ver que frecuencias "pesan" mas con respecto a otras,
decidimos realizar graficas de numero de cuentas versus frecuencia.
50

1
l
60
55
50
45
40
35
C/) 30 ca ..... e:
25 Q) ::J o
20
15
10
5
o o 5
Fig.3.20
~
BBS ( oscilacion en X)
X N
11 <O LO X oc) <O
('t)
11 <O (J)
""'" N ¡-....
N
""'" ¡-.... ¡-....
o ('t)
X
""'" 11 LO ~
¡-.... LO
¡-.... o o <O
X X LO <O
11 11 o ('t) ¡-....
('t)
~ LO
¡-.... 00
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95100
frecuencia (Hz)
Esta grafica nos indica para el caso BBS, que frecuencia tiene mayor "peso" con respecto a otras. Por ejemplo vemos que la frecuencia de 15.81Hz "pesa" aproximadamente 50 (ver coordenada en el eje vertical), queriendo decir que de los 300 espectros evaluados, esta frecuencia (15.81Hz) está presente 50 veces. Con respecto al ruido introducido por la PC, notamos que la frecuencia de la red (60.07Hz) ya sea con o sin su máxima amplitud relativa en cada espectro es la que "pesa" más (aproximadamente 54), también indicamos el ruido como 2x, 3x, 4x, 5x y 6x.
51

Para poder apreciar mejor la grafica anterior, analizamos por rangos. Los rangos analizados
son:
[O: 10]Hz; [10: 20]Hz; [20: 40]Hz; [59: 61]Hz;· [81: 85]Hz
Em (cmlcrioo m X}
10 -M LO
9 -
8 CD O')
7 LO - ...r
M
en 6 ctS ...... e: 5 Q) ::J u 4
...r - 1'- N LO LO CX) .......
M ...r <Ó - ('1) ....... 00 ('1)
('1) <D
3
2
M <X> ~CD N·
o N
LO o "'"'""
o
1
o
('1)
1111 111 1 11 1 1
o 1 2 3 4 5 6
frenaria (Hz)
Fig.3.21
N CX)
CD
O') ...r 1'-
V o 00
l 7 8
O') O')
CX)
N M có
9
1'-...r O')
LO en en
10
Vemos que en el rango de [0: 10]Hz que es importancia para el ingeniero estructural, la frecuencia de 5.33Hz "pesa" más (su peso es 9).
52
BBS ( oscilacion en X)
60 cry
55 00 LO ......
50
45
40 N <O LO
35 ......
(/) ""'" 30 ...... m ..... 1'-- <O e
""'" ......
Q) 25 LO ::J ...... o
20
15 OLO 00 N ...... ......
LO<!! cri 00 00 ·{ry ...... 00 <J)
10 cry ...... ...... o ...... ...... ...... 00 00
5 o ......
o 10 11 12 13 14 15 16 17 18 19 20
frecuencia (Hz)
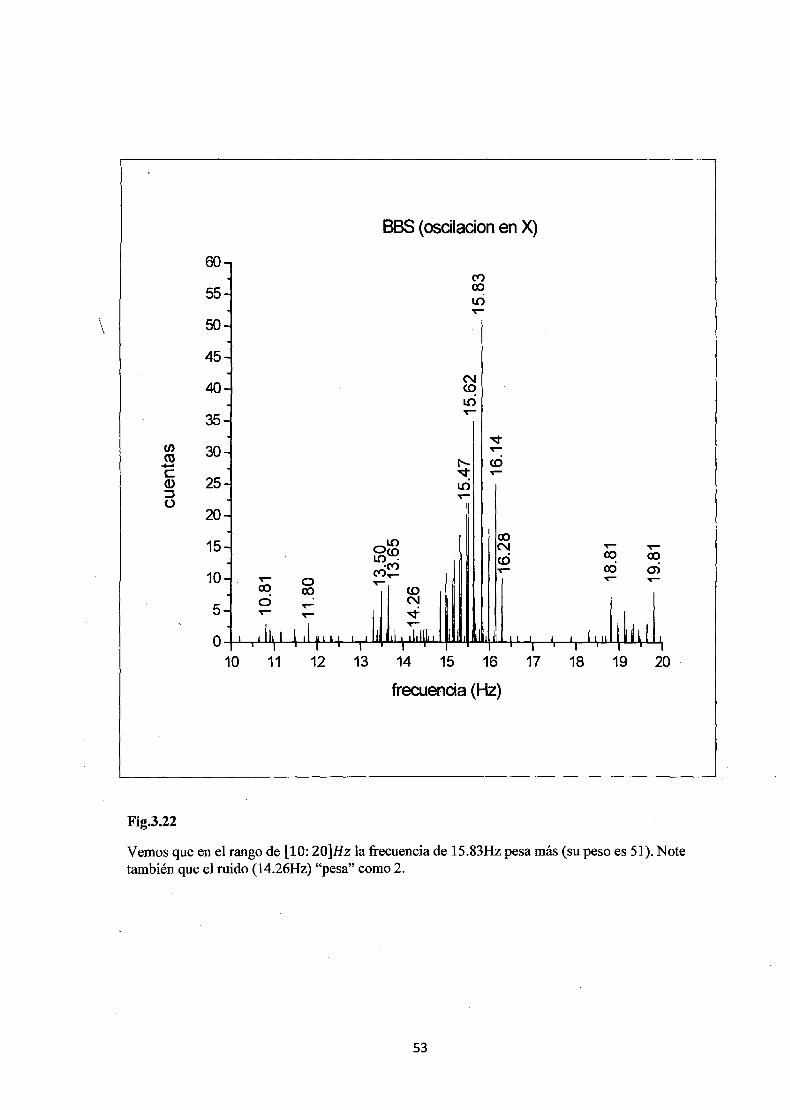
Fig.3.22
Vemos que en el rango de [10: 20]Hz la frecuencia de 15.83Hz pesa más (su peso es 51). Note también que el ruido (14.26Hz) "pesa" como 2.
53

BBS (oscilaciones en X) 30
28 N co 26 (J) (J)
LO N 24 <X)
N 22
20
18 CJ) 16 ro
+-' e Q)
14 :::J 12 (J)
o N ~
10 ~~'-·N
"' 8 N N (0.
~ ":N N
6 MCO oq: o~""'" ~""'" N M(\j· ..q cr)ct') M~ ..q
4 NN "' M 2
o 20 22 24 26 28 30 32 34 36 38 40
frecuencia (Hz)
Fig.3.23
Vemos que en el rango de [20: 40]Hz la frecuencia de 29.62Hz pesa más (su peso es 24).
54

BBS (oscilacion en X)
60- 'V o c:i
55- <O
50-
45-
40-
35-en ro 30--e: ()) ro Q)
25-. ro o
:::J o) c:i (.) 1() <O
20- o N
<O o <O 15- 1'- <O ('1)
('l)o) 'V c:i 1'-1() N N <O
10- o) ()) c:i
1() ()) <O
5-
~1 1()
~ 1~ o " A " A A
1 1 T ~ 1 T T 1 1
59,0 59,2 59,4 59,6 59,8 60,0 60,2 60,4 60,6 60,8 61,0
frecuencia (Hz)
Fig.3.24
Vemos que en el rango de [59: 61]Hz la frecuencia de 60.04Hz (frecuencia de la red) pesa más (su peso es 54).
SS
(/) ro ..... e Q)
5
4
3
-
-
-
~ 2 -
1 -
o 81 ,O
Fig.3.25
c:o ~ ..-c:o
<O N <O c:o ..- ..-(1() (1()
.,-0 1.{)~ ....,.:..-c:oC:O
81,5 82,0
BBS (oscilacion en X)
o o M (1()
1'- <O c:o ("") ("") ..- V c:o N M M M c:o c:o (1() c:o
m I.Ov N N ..- o V 1"-:c:o ("") ..- ("") 1.{)
N N . M ...t ...t ...t c:o c:o~ c:o (1() (1() c:o
1 --. 82,5 83,0 83,5 84,0 84,5 85,0
frecuencia (Hz)
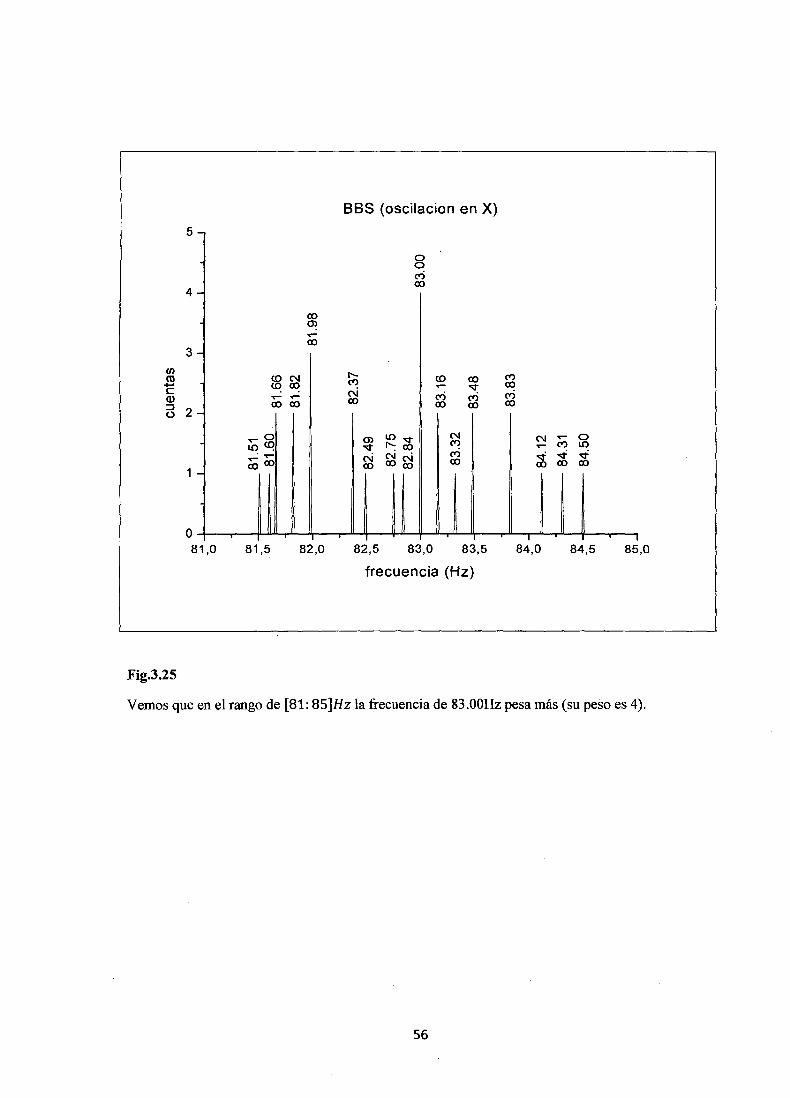
Vemos que en el rango de [81: 85]Hz la frecuencia de 83.00Hz pesa más (su peso es 4).
56

BBN (oscilacion en Y) X
1.0 150 (X) 11 X (X)
(") co 140 V
V m (") 11 1.0
130 Lri ...... N ...... ....... 1.0
120 Lri (X)
110
100 CJ) 90 m ro - 80
1.0 V e: ...... Q) e» N :::J 70 (.) ...... N
X cD 60 (")
1.0 11
50 (X)v 1.0 ......
(")1"-: ('1') 40 . N (X)
r--v (")
30
20
10
o o 10 20 30 40 50 60 70 80 90 100
frecuencia (Hz)
Fig.3.26
Esta grafica nos indica para el caso BBN, que frecuencia tiene mayor "peso" con respecto a otras. Por ejemplo vemos que la frecuencia de 15.44Hz "pesa" aproximadamente 125 (ver coordenada en el eje vertical), queriendo decir que en los 600 espectros evaluados, esta frecuencia (15.81Hz) está presente 125 veces. Con respecto al ruido introducido por la PC, notamos que la frecuencia de la red (59.88Hz) es la que "pesa" más (130), también indicamos el ruido como x, 2x, 3x, 4x, 5x y 6x.
57

Similarmente al caso BBS con la intensión de poder ver mejor que frecuencias pesan más,
analizamos el caso BBN por rangos. Los rangos son los siguientes:
[0: lO]Hz; [10: 20]Hz; [20: 30]Hz; [30: 40]Hz; [40: SO]Hz;
[SO: 60]Hz; [60: 70]Hz; [60: 80]Hz; [80: 90]Hz y [90: 100]Hz.
BBN (oocila::ion en Y)
70 .......
o lO ...- o lO 1'---CX) . ....,.. lO ....... 1'--- V lO('I) m o
M Lri ......: N ....... N C'i m lO 1'---<01'---~
<O 1'--- 1'---0('1)...,.. <O -.ri..r; 1'--- CX) <O <Ó ....,..
00
- t"i o ('1)
lO ....... m m
50
o m - .......
o 1'---o
20 ('1) lO o
10
o _l 111 111 1111 11 1111
o 1 2 3 4 5 6 7 8 9 10
frea.aDa (Hz)
Fig.3.27
Vemos que en el rango de [O: 10]Hz la frecuencia de S.OlHz pesa más con respecto a las otras (su peso es 65).
58

BBN ( oscilacion en Y) 140-
120-
100- "r" CX)
Lri "r"
N 80- co co
(/) t-- ('1) "r"
ro N t-- "r" o) +-' . ·m (J) "r" (J) e ~~ co· t--Q) 60- CX) co~ co (J) ::l o N o "r"
('1) N 1!) "r"
"r" "r" ....,.
CX) "r"
"r" CX)
(J) "r" co "r"
40- t-- o...,. CX)
1'-t-- o ....,.
"r" "r" CX) "r" "r"
20-.
llJ o 10 11 12 13 14 15 16 17 18 19 20
frecuencia (Hz)
Fig.3.28
Vemos que en el rango de [10: 20]Hz la frecuencia de 15.50Hz pesa más (su peso es 125).
59

Fig.3.29
Vemos que en el rango de [20: 30]Hz la frecuencia de 20.12Hz pesa más (su peso es 55).
60

40- BBN (oscilacioo en Y)
35-1'-......
30-1'-("')
...... T""" L{) ......
...... ~<:'! L{) 25-..q-~ -r- N ("')
("') (\")Q ("')(\") co
"'O e) M ...... L{) ("') . 1'-
::J ("') m OC") 00 ~~ co
:!:::: 20- N Me..) c..) Ol.o 00
~ T"""
o. T""" ("') ("') ("') L{) L{) ("') ("') ("')
E co <( 15-
("')
N ...... 00 ....... ("') 001'-("') . m
T""" 00 ("') T"""
("')
00 co ("') 00 en
10-("')
5-
,, 11 1 1 a~~~~~~~~~~~~~~~~~~~~~l
30 31 32 33 34 35 37 38 39 40
frecuerria (Hz)
Fig.3.30
Vemos que en el rango de [30: 40]Hz la frecuencia de 37.47Hz pesa más (su peso es 29).
61

40- BBN ( a;cilacion en Y) ('1) .......
35-N -.;t
30-
25-
"'O tON :::l 20-~ -r-
:!::::: -.;t ~o c.o a. N
('1) • O') O') o c.o -.;t--t
E -.;t('t') ....... -.;t -.;t ....... CX) ....... o -q: ....... -.;t
<( 15- CX) ('1) -.;t CX) CX) -.;t -r-
-.;t -r- o -.;t o -.;t c.o -.;t ('1) c.o -.;t o) -.;t -.;t -.;t
10--.;t
5-
o 111 IJIII 1
40 41 42 43 44 45 46 47 48 49 50
frecuencia (Hz)
Fig.3.31
Vemos que en el rango de [40: SO]Hz la frecuencia de 42.73Hz pesa más (su peso es 34).
62

Fig.3.32
Vemos que en el rango de [SO: 60]Hz la frecuencia de 59.92Hz pesa más (su peso es 130).
63
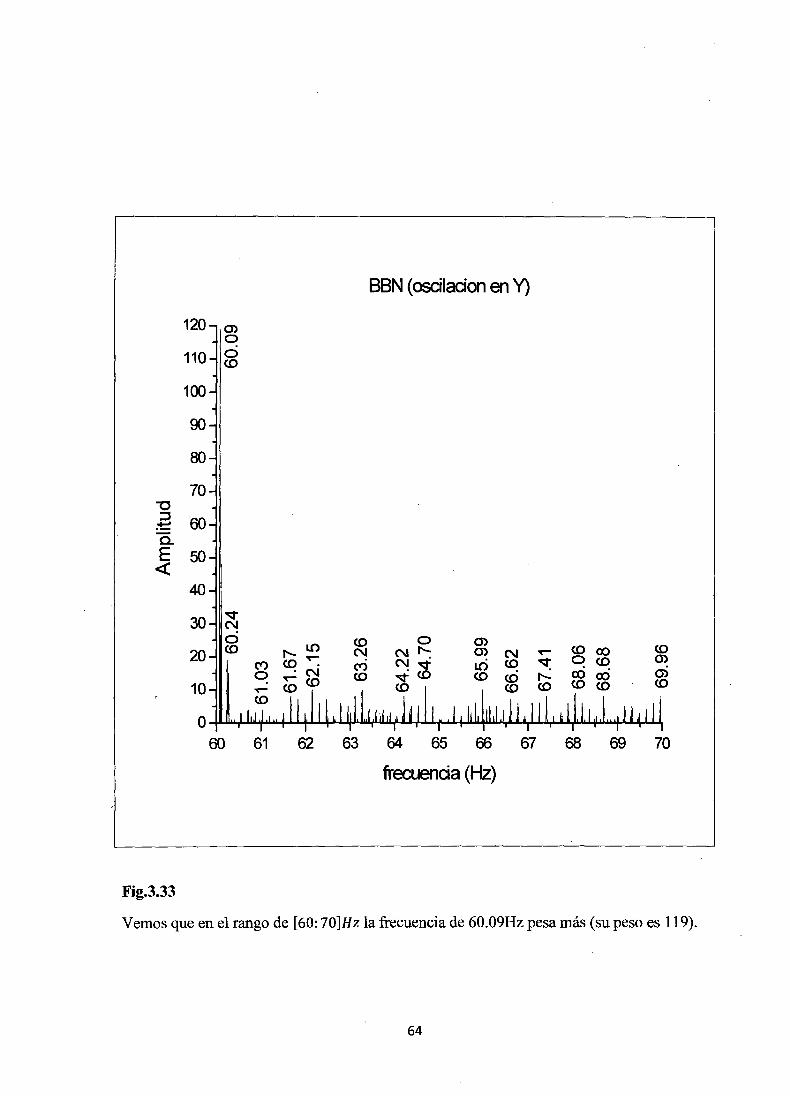
Fig.3.33
Vemos que en el rango de [60: 70]Hz la frecuencia de 60.09Hz pesa más (su peso es 119).
64
BBN (oscilacion en Y)
130
120
110
100
00
80
'U 70 :::J ~
0.. 60 E <( 50
40
30
20
10
o 70 71 72 73 74 75 76 77 78 79 80
frecuencia (Hz)
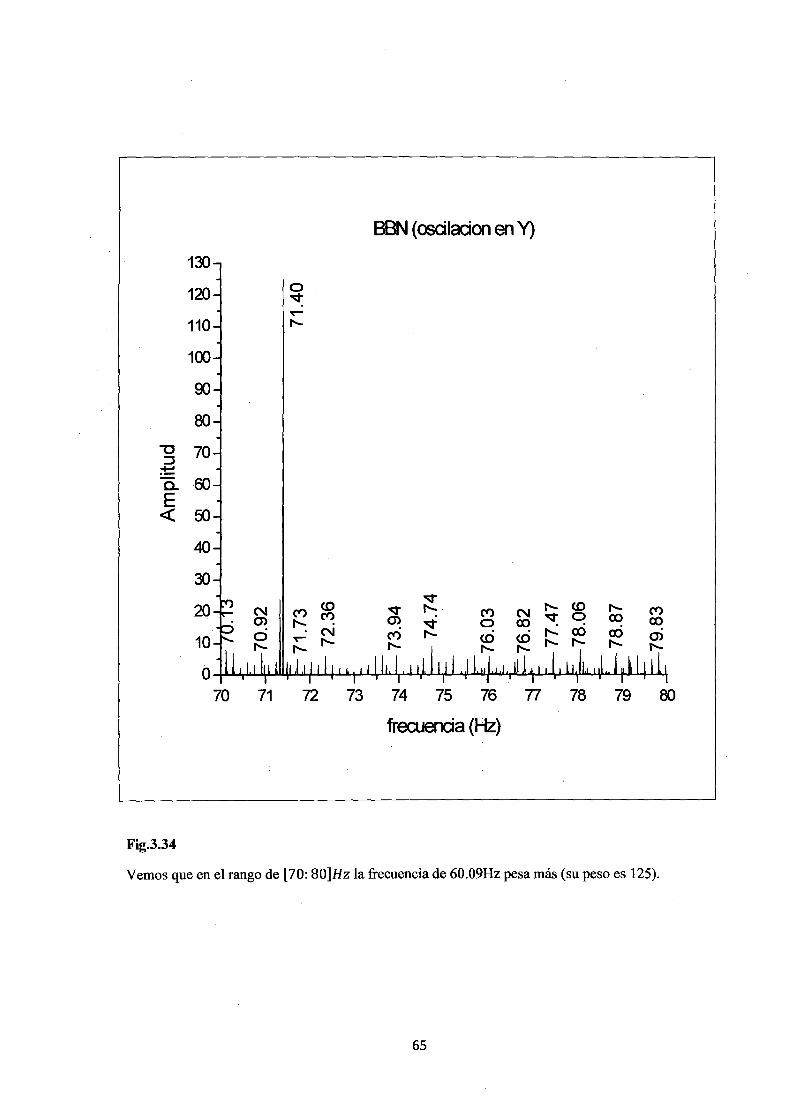
Fig.3.34
Vemos que en el rango de [70: 80]Hz la frecuencia de 60.09Hz pesa más (su peso es 125).
65

110
100
90
80
70
-g 60 ~
E" so <(
Fig.3.35
40
30
20
10
80 81 82 83
BBN ( osciladon en Y)
84 85
LO LO LO CX)
86
frecuenda (Hz)
87 88 89
Vemos que en el rango de [80: 90]Hz la frecuencia de 85.55Hz pesa más (su peso es 114).
66
90

BBN ( oscilacion en Y) 10-
9-
8-LO ('t') ('t') m o T""" m m
7- V <O V
!"-- m o 6- ('t') ('t') <O <O "'C
('t') LO ex) ::J m m N m 5- ('t') LO ~ CX) N o o. o N !"--E m m m
CX) 4- <O <( T""" ('t')
V m 3 ... m m
2-
1-
o l
90 91 92 93 94 95 96 97 98 99 100
frecuencia (Hz)
Fig.3.36
Vemos que en el rango de [90: lOO]Hz la frecuencia de 90.35Hzy la frecuencia de 91.93Hz pesan más (ambos tienen igual peso a 7).
67

130
120
110
100
90
80
w 70 ro .... e: 60 Q) :::::1
() 50
40
30
20
10
o
Fig.3.37
-BBN -BBS
o 5 1 o 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
frecuencia (Hz)
Analizando entre [O: lO]Hz, el pico de mayor peso en BBN es 5.01Hz, mientras que para el BBS el pico de mayór peso es 5.33Hz. Entre [10: 20]Hz, el pico de mayor peso en BBN es 15.44Hz, mientras que en BBS es 15.81Hz.
68
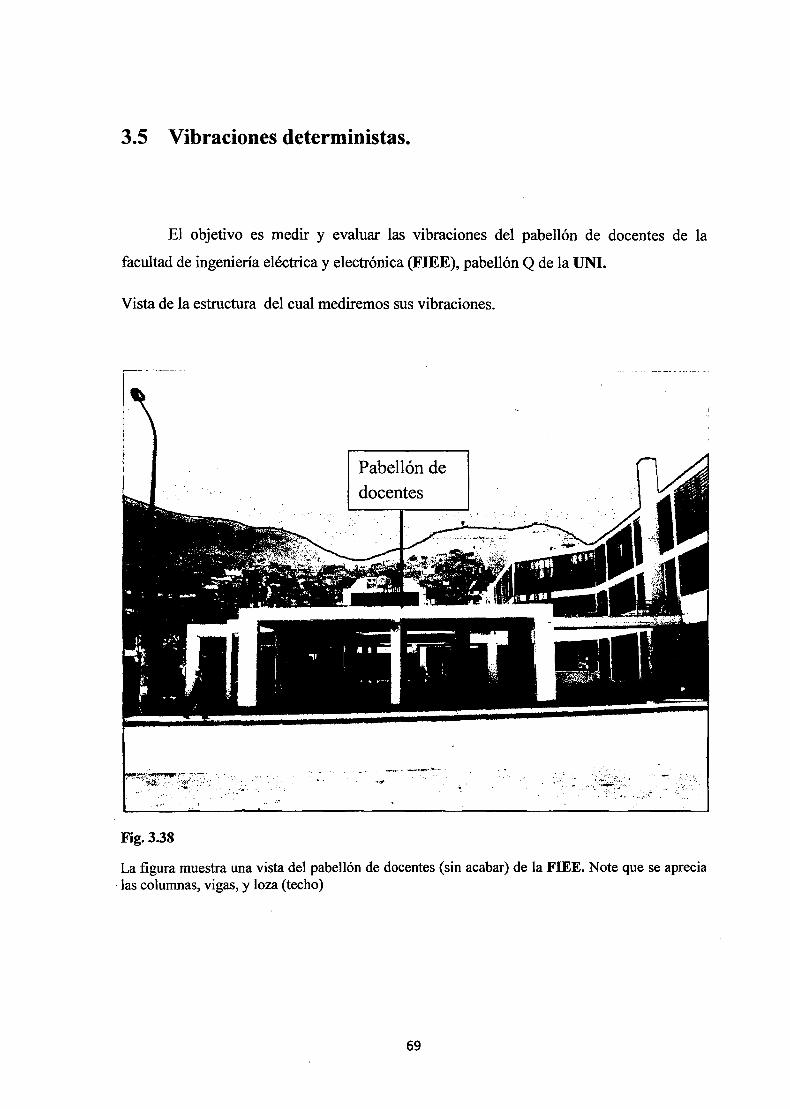
3.5 Vibraciones deterministas.
El objetivo es medir y evaluar las vibraciones del pabellón de docentes de la
facultad de ingeniería eléctrica y electrónica (FIEE), pabellón Q de la UNI.
Vista de la estructura del cual mediremos sus vibraciones.
Fig. 3.38
Pabellón de docentes
·-"'"· ·- .· .
' _..;.~·:~:;::;-... ,.,_··~ ... ·· .. ,.
,•. · .... , ; ~- .~: .. "'
La figura muestra una vista del pabellón de docentes (sin acabar) de la FIEE. Note que se aprecia las columnas, vigas, y loza (techo)
69

Fig. 3.39
La figura muestra otra vista del pabellon de docentes de la FIEE. Ademas indicamos el punto donde excitamos con lds parlantes. Note que es una estructura irregular.
70
3.5.1 Equipos utilizados
l. Dos Parlantes de 1 OOOW cada uno
2. Un laser semi conductor
3. Un Detector LPD (Laser Photo Deflection)
4. UnaPc
5. Un Osciloscopio
6. Un generador
7. Un Amplificador
3.5.2 Procedimiento experimental
Se pegó el espejo en la parte central de la viga pero cerca de la columna, usando
para ello silicona. Luego se colocó ellaser (alimentado con dos pilas cada una de 1.5 V) en
la base de la columna, sujetándolo para ello con un soporte de tornillo, con la condición de
que la luz laser primero se refleje en el espejo y luego llegue al detector LPD, como se
muestra en la figura 3.40.
71

(a)
••• (b)
Fig.3.40
(a) Mostramos la posición del espejo pegado a la viga. (b) mostramos la disposición y posición del sensor LPD y ellaser, los cuales están ubicados en el piso.
72
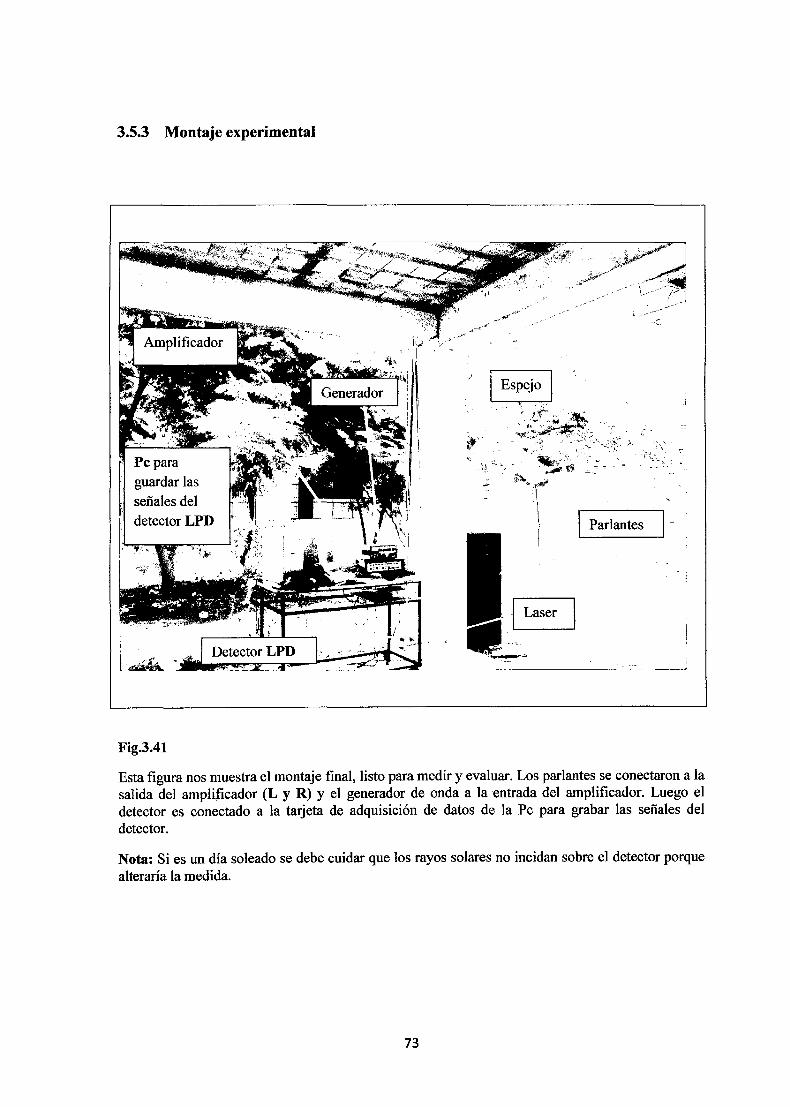
3.5.3 Montaje experimental
Pe para guardar las señales del detector LPD
Fig.3.41
Esta figura nos muestra el montaje final, listo para medir y evaluar. Los parlantes se conectaron a la salida del amplificador (L y R) y el generador de onda a la entrada del amplificador. Luego el detector es conectado a la tarjeta de adquisición de datos de la Pe para grabar las señales del detector.
Nota: Si es un día soleado se debe cuidar que los rayos solares no incidan sobre el detector porque alteraría la medida.
73

Nosotros hemos excitado a la estructura en una sola dirección (eje X)
Fig.3.42
La figura muestra una vista en planta de la estructura e indicamos la dirección de la excitación
Tabla 3.4
Leyenda
Las señales que se han grabado del detector (LPD) a la computadora, tienen etiquetas (nombre de
archivo en la Pe) que nos indican el rango de frecuencias con que la fuente excitadora (parlantes)
ha vibrado, por ejemplo:
0-1 0: indicamos con este nombre de archivo, que hemos barrido de a O a 1 O Hz.
10-20: indicamos con este nombre de archivo, que hemos barrido de a 1 O a 20 Hz y así.
74

Señal (correspondientes a tiempo de grabación de la Observaciones oscilaciones en X) señal (minutos) 0-10 50 No se obtienen picos
10-20 50 No se obtienen picos
20-30 50 No se obtienen picos
30-40 50 No se obtienen picos
40-50 50 Se obtienen picos, pero a partir de 45 Hz
50-60 50 Si se obtienen picos
70-80 50 Si se obtienen picos
80-90 50 Si se obtienen picos
90-100 50 Si se obtienen picos
El tamaño de muestra que hemos considerado para evaluar es de 5 s. Inicialmente
consideramos de 28 s pero nos dimos cuenta que los espectros de ambos tamaños de
muestra no eran muy diferentes para lo que queríamos obtener.
75

Veamos:
Espectro cuyo tamaño de muestra es 28 segundos
400
200
~
7 o~~~~~~~~~~~~~~r~-~-~--~~~----J o 20 40 60 80 100
Frequency (Hz)
Espectro cuyo tamaño de muestra es 5 segundos
400
200
o 20 40 60 60 100
Frequency (Hz)
Fig.3.43
Note que ambos espectros dan la misma información, es decir en ambos aparece el pico de 49.5 Hz. Pero note que el espectro de 28 s es más denso que la de 5segundos y esto se debe a que en la de 28 s se evalúa mayor número de datos comparado con la de 5 segundos.
76

Una vez definido el tamaño de muestra se barrió de O Hz.hasta 100Hz con un incremento
de 0.2 Hz cada minuto.
Las muestras que se obtuvieron de cada señal tienen el siguiente formato:
Muestra: 0/3/9 \.. J
]_
/ Hora/minuto/segundo: El nombre de la muestra nos indica su posición temporal
3.5.4 Espectros del pabellón Q
Mostraremos tres espectros de frecuencia del pabellón Q.
77

li\~~i~ ~w~~*~~\iNfJ~i~~N~\~\1tNii w~~:}~ ~·\'r1fi\\~t{~Jr~~,~~V~~ 1
1.
x ~deespedrO X
400~--~----r---~--~----~--~--~----~--~--~
espectro de la muestra 0/9/32
300
Q) "O ;:¡ 200 :!:::: o_ E <(
r--100 C'!
o 20 40 60 80 100
Frequency (Hz)
Fig.3.44
En esta figura mostramos la "muestra (0-9-32)" de la "señal (50-60)" y su espectro de frecuencias que se obtuvo realizando su FFT. Note que la frecuencia con lo cual la estructura fue excitada es: 51.27 Hz. Note también que las amplitudes de las frecuencias bajas (entre O y 10Hz) tienen una amplitud relativa menor que la señal de 60 Hz, que corresponde al ruido.
78

Q) "O
=ª c.. E <(
Fig.3.45
1 Tranr¡pofte x Anaizador de espedro
400.---~r----.----~---T----~---,----~----~--~--~
300
200
100
o 20
espectro de la muestra 0/45/1 O
C')
C'! 00 10
40 60
Frequency (Hz)
80 100
Esta figura nos muestra la "muestra (0-45-10)" de la "señal (50-60)" y su espectro de frecuencias que se obtuvo realizando su FFT. Note que la frecuencia con lo cual la estructura fue excitada es: 58.23 Hz. En este espectro también se puede apreciar que la amplitud relativa de las frecuencias bajas (entre O y 1 O Hz.) es menor que la de 60 Hz, que corresponde al ruido
79

300
200 Q)
-o
~ 0..
E <(
100
o+---~--~~~~~~~~~~~~~~~~ o 20 40 60 80 100
Frequency (Hz)
Fig.3.46
Esta figura nos muestra la "muestra (0-4-50)" de la "señal (0-13)" y su espectro de frecuencias que se obtuvo realizando su FFT. Note en este espectro que salen muchos picos e incluso las frecuencias bajas (entre O y 1 O Hz) tienen ahora mayor amplitud relativa que la frecuencia de 60 Hz.
80
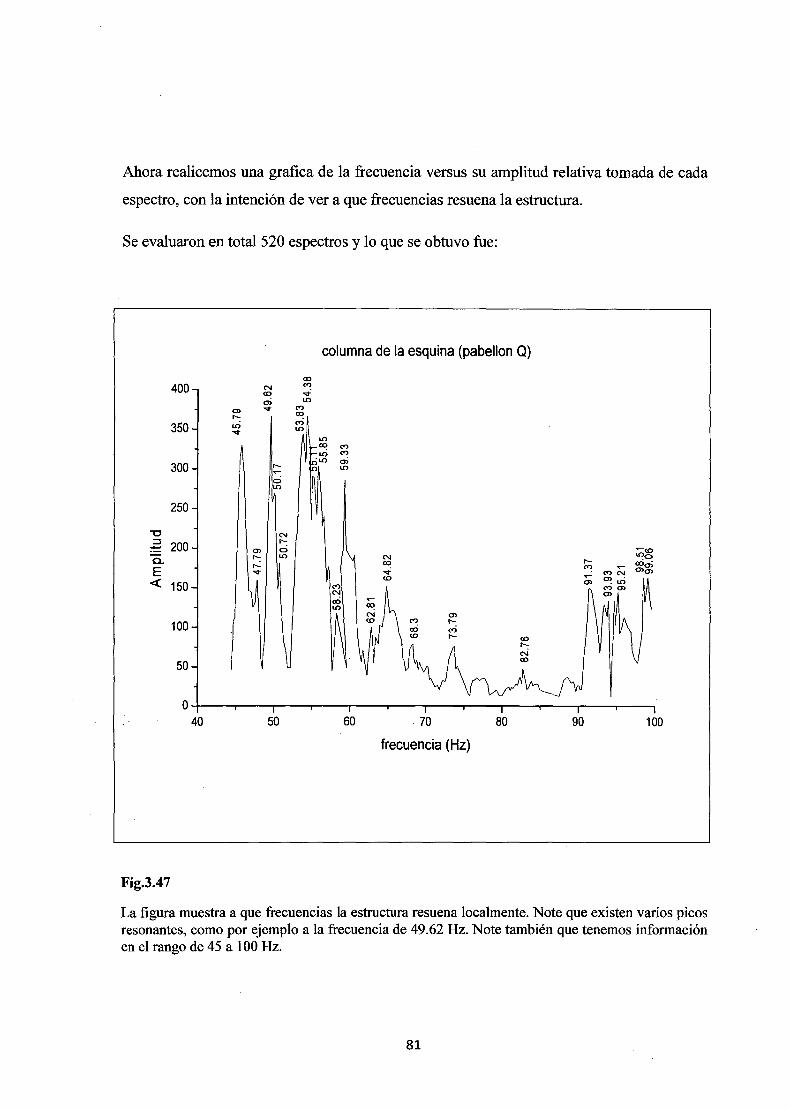
Ahora realicemos una grafica de la frecuencia versus su amplitud relativa tomada de cada
espectro, con la intención de ver a que frecuencias resuena la estructura.
Se evaluaron en total 520 espectros y lo que se obtuvo fue:
Fig.3.47
La figura muestra a que frecuencias la estructura resuena localmente. Note que existen varios picos resonantes, como por ejemplo a la frecuencia de 49.62 Hz. Note también que tenemos información en el rango de 45 a 100Hz.
81

Tabla 3.5
Frecuencia (Hz) Amplitud Relativa
45.79 329.64
47.79 159.54
49.62 366.65
50.17 269.89
50.72 181.12
53.83 343.5
54.38 366.59
55.11 290.64
55.85 302.87
58.23 118.06
59.33 285.79
62.81 99.67
64.82 152
68.3 79.04
73.79 75.66
82.76 47.66
91.37 149.86
93.93 133.35
85.21 145.13
98.51 163.04
99.06 163.16
La tabla 3.5 muestra que el pico cuya frecuencia es 49.62 Hz tiene la mayor amplitud relativa en el
rango de 45 a 100Hz. Esta frecuencia corresponde a un modo local.
82

Veamos algunos espectros más:
200
<L> "'C :::::J ........
0.. ('t)
('t)
E «> <( ""'"
100
45
Fig.3.48
r-N
LO
50
""'" N
o «>
N o
('t)O>
OO..-~ O>
...,....._:co co u-) LO LO
LO «>
55 60
«>
65 70 75 80 Frequency (Hz)
85 90 95
La figura nos muestra el espectro de la "muestra (0-3-13) y señal 0-13" note en este espectro que gran cantidad de picos de la estructura se activan.
83
100

300
<O o
200 r-...... ......
N
Q) o u <O
~ +J
a.. C") r-..-- C")
E ...... N
:::( ......
100
N N
00 LO ......
C")
...... r-
o 20 40 60 80 100 Frequency (Hz)
Fig.3.49
Igualmente en este espectro de la "muestra 0-4-50 y señal 0-13" se activan gran cantidad de picos correspondientes a la frecuencia de la estructura, inclusive la frecuencia de resonancia 1.46 Hz se activa.
84

Capitulo 4
Simulación en el ETABS
El objetivo es realizar la simulación de lo que hicimos en el campo y los resultados
que obtengamos de la simulación serán comparados con las mediciones experimentales.
Para la simulación se uso el programa ET ABS.
4.1 EL PROGRAMA ETABS. [7]
En el medio existe una gran variedad de software para el análisis y diseño de
estructuras de los cuales el ET ABS es uno de los más difundidos. El software ET ABS es
una herramienta que el ingeniero utiliza para llevar a cabo análisis estructurales y diseño de
edificaciones ya sean estas de concreto armado, acero estructural o una combinación de
ambas.
En años anteriores, el llevar a cabo un análisis estructural tomaba un tiempo considerable,
sin embargo en la actualidad este mismo análisis toma algunas horas dependiendo de la
capacidad del computador que se esté usando y de la complejidad de la edificación a
analizar.
Este ahorro en tiempo por parte del ingeniero en lo que corresponde al cálculo le da mayor
espacio para observar con más detenimiento otros detalles como lo son la simetría,
irregularidades, diseño de la estructura, proceso constructivo, etc.
ET ABS posee una interfaz grafica con procedimientos de modelaje, análisis y diseño,
todos integrados usando una base de datos común.
ET ABS también puede manejar los más grandes y complejos modelos de edificios,
incluyendo un amplio rango de comportamientos no lineales, haciéndolo la herramienta
predilecta para ingenieros estructurales en la industria de la construcción.
ET ABS ofrece la mayor cantidad de herramientas de análisis y diseño disponibles para el
ingeniero estructural que trabaja con estructuras de edificios.
85
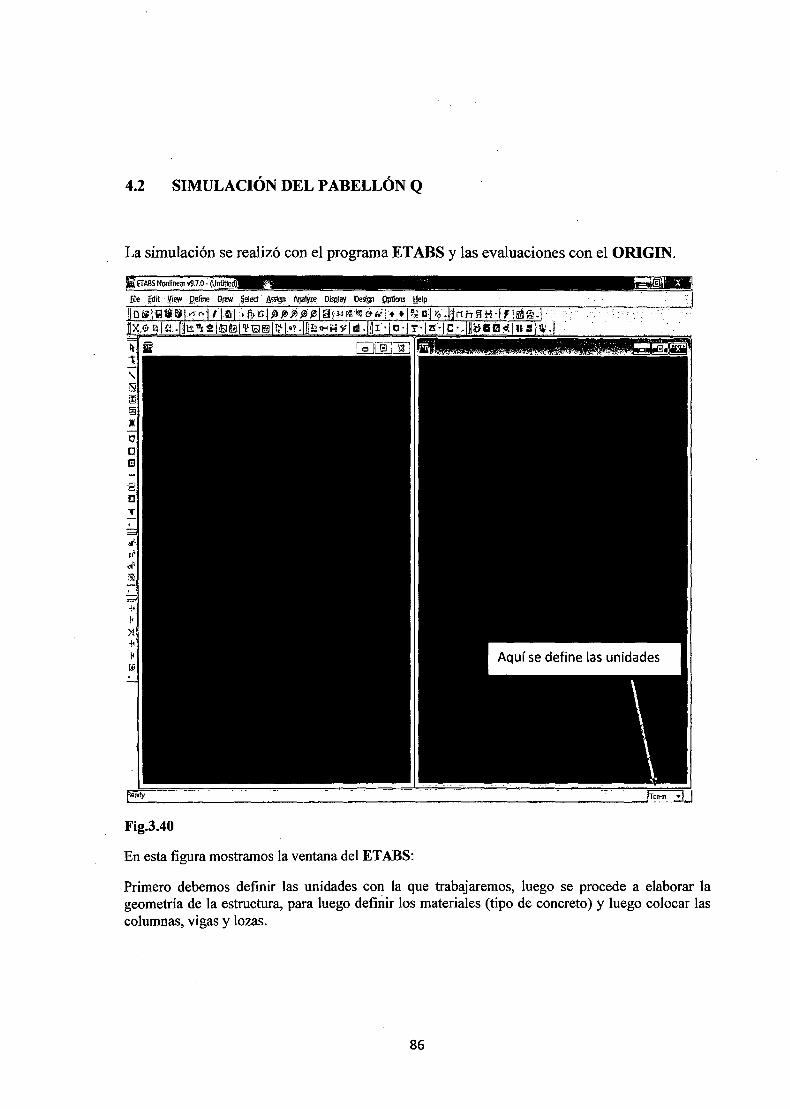
4.2 SIMULACIÓN DEL PABELLÓN Q
La simulación se realizó con el programa ETABS y las evaluaciones con el ORIGIN.
Fig.3.40
En esta figura mostramos la ventana del ET ABS:
Primero debemos definir las unidades con la que trabajaremos, luego se procede a elaborar la geometría de la estructura, para luego definir los materiales (tipo de concreto) y luego colocar las columnas, vigas y lozas.
86

Las dimensiones de la estructura se obtuvieron del plano del pabellón Q (ver figura 3.41).
Fig. 3.41
Plano del pabellón Q, para obtener las dimensiones de las vigas, columnas y lozas (a) vista en planta (b) vista en elevación.
87

Como algunas dimensiones se modifican durante la construcción, entonces para verificar si
las dimensiones del plano eran las correctas, decidimos medir las dimensiones de la
estructura en el campo.
El programa requiere el modulo' de Y oung de la estructura, pero como esta cambia al
transcurrir el tiempo, entonces teníamos que medirlo en el campo. Una de las formas es
realizando la Diamantina, el cual consiste en sacar una muestra de la estructura y llevarlo
al laboratorio de ensayo de materiales para la prueba de carga. Pero, no podíamos realizar
esto ya que tendríamos que perforar la estructura, y se nos permitió trabajar con la
estructura (pabellón Q) con la condición de no realizar perforaciones, por ello usamos una
forma indirecta (no normada). Para ello requerimos· de un instrumento denominado
esclerómetro.
4.2.1 Esclerómetro
Es un instrumento desarrollado para la determinación de la dureza al choque del
hormigón. Se usa en el control no destructivo de la calidad del hormigón en obras
terminadas. La medición precisa de la resistencia a la compresión (que calcula
directamente la capacidad de carga y durabilidad de las estructuras de hormigón) se calcula
impactando el hormigón con una determinada energía y midiendo a continuación el rebote
del martillo. El rebote se corresponde con la dureza del hormigón. Si se utilizan tablas de
conversión, el valor del rebote puede correlacionarse con la resistencia a la compresión.
Este instrumento les permite a los ingenieros medir la resistencia a la compresión de las
estructura de hormigón existentes in situ, para controlar así la calidad del hormigón y
detectar los puntos débiles.
Ensayo
El objetivo del ensayo es evaluar la resistencia a la compresión del concreto.
Equipo utilizado
Para la realización del ensayo se utilizó:
88

• Un esclerómetro (H.W. Kessel.) con sus accesorios.
Procedimiento
• En cada columna a ensayar se ubicaron 16 puntos
• Se verificó que la superficie de contacto fuera lisa
• Se procedió a ubicar el esclerómetro en cada punto, en forma perpendicular
a la columna para luego presionarlo horizontalmente con cuidado
manteniendo la perpendicularidad.
• Luego de escuchar el sonido del resorte interno (señal de que había llegado
a obtener la máxima dureza del concreto), las lecturas fueron observadas
directamente en el esclerómetro por medio de un grafico en papel calibrado,
propio del instrumento.
¡-··· .----/ ..
/
/ ESCLERÓMETRO i
.~--~ .. •~; (a) (b)
Fig.3.42
(a) Mostramos la posición de la columna donde medimos los rebotes, además, note que el esclerómetro siempre se mantiene perpendicular a la columna. (b) Muestra la escala donde se leen los rebotes y el papel calibrado a su costado.
89

Tabla 3.6
Lectura del rebote que Resistencia aproximada indica el esclerornetro. (Kg 1 cm2
)
54 673,2
52 632,4
52 632,4
50 591,4
50 591,4
52 632,4
52 632,4
50 591,4
50 591,4
50 591,4
48 550,2
52 632,4
52 632,4
50 591,4
50 591,4
50 591,4
La resistencia promedio es: 609.3 + 29 .8Kg 1 cm2
90

Fig.3.43
Modelo de edificación usando el programa ETABS. lndicamos también el puntó del cual obtendremos su respuesta.
91

Fig.3.44
Período_! (0.6 s) y f=I.67 Hz, correspondiente al modo fundamental en la dirección x
92

... ,~·.·· /. '(?/
Fig.3.45
Período_2 (0.45 s) f=2.22 Hz, correspondiente a un modo de rotación.
93

Fig.3.46
Período_ 3 (0.43 s) f-=2.33 Hz, correspondiente a la frecuencia fundamental en la dirección Y.
94

. Figura 3.47
.. 95.
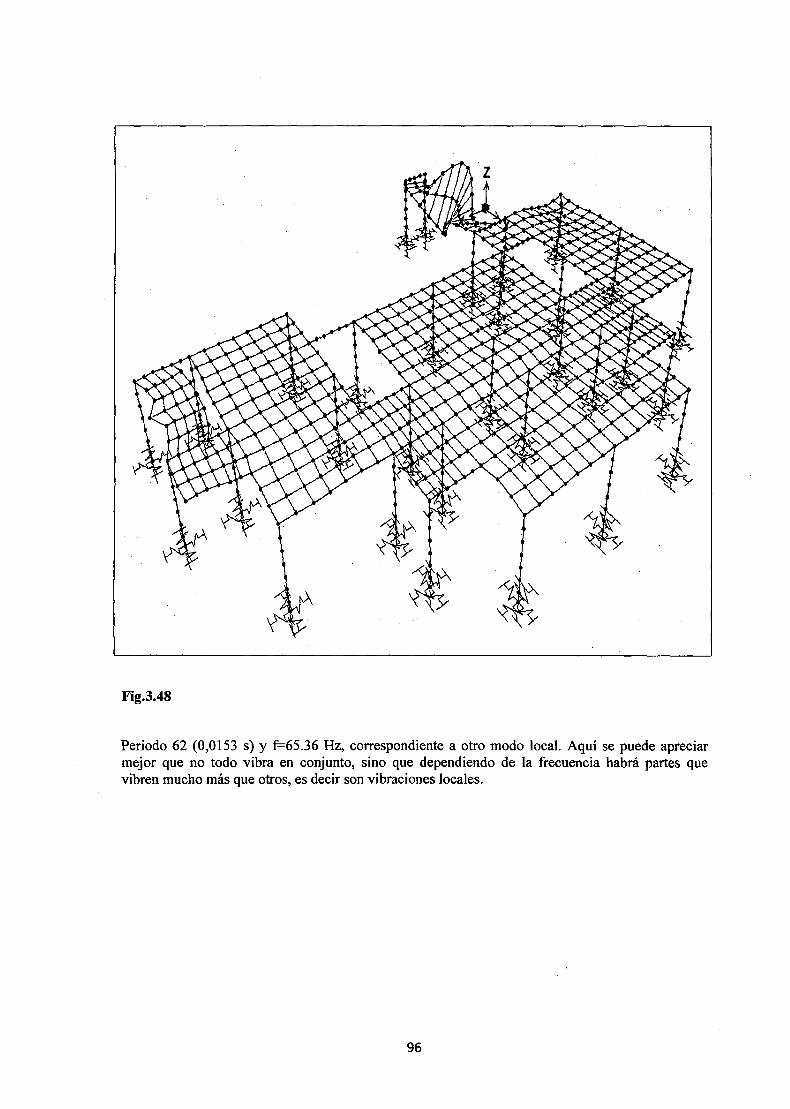
Fig.3.48
Periodo 62 (0,0153 s) y f=65.36 Hz, correspondiente a otro modo local. Aquí se puede apreciar mejor que no todo vibra en conjunto, sino que dependiendo de la frecuencia habrá partes que vibren mucho más que otros, es decir son vibraciones locales.
96
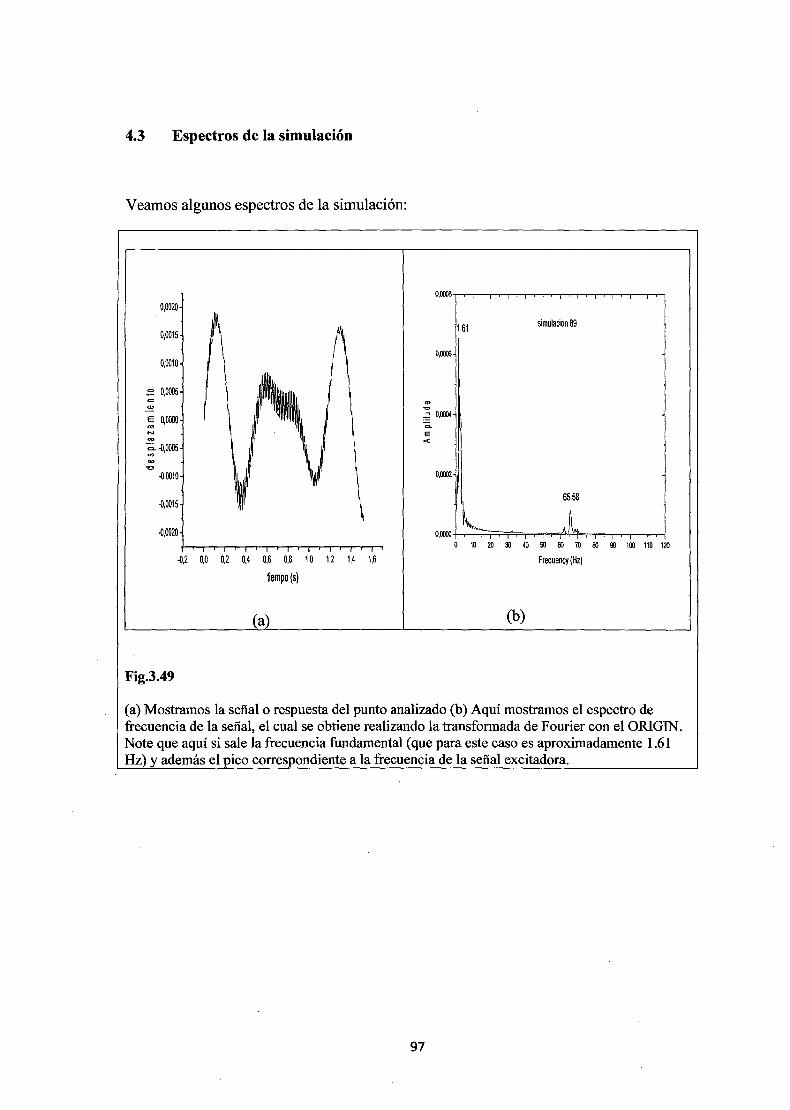
4.3 Espectros de la simulación
Veamos algunos espectros de la simulación:
0,0020
0,0015
0,0010
.8 0,0005
!;; 0,0000 ..... "' ~-íl,0005 .,
-íl,0010
-íl,0015
.(),0020
-íl,2 0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6
tiempo(s)
(a)
Fig.3.49
<l>
""
O,OOXl
~ 0,0004 C>.
E <C
0,0002
1.61 simuladon 89
65.58
0,0000 ~ Afl o w ~ ~ ~ w oo ro oo oo • m w
Frequency (Hz)
(b)
(a) Mostramos la señal o respuesta del punto analizado (b) Aquí mostramos el espectro de frecuencia de la señal, el cual se obtiene realizando la transformada de Fourier con el ORIGIN. Note que aquí si sale la frecuencia fundamental (que para este caso es aproximadamente 1.61 Hz) y además el ico corres ondiente a la frecuencia de la señal excitadora.
97

0,003
0,002
.8 0,001 e::
-~ E
::: 0,000 "' "' Q)
.(),001
.(),002
.(),2 0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6
tiempo (s)
(a)
Fig.3.50
1.67 Hz
O,!XXJ4 <1> .., =
E 68.56Hz
""" üoo:J2
.).)"'-..
20 -ID 60 110 100 120
Frequency (Hz)
(b)
(a) Señal o respuesta del punto analizado (b) Mostramos el espectro de frecuencia de la señal. Note que la frecuencia fundamental es 1.67 Hz y la frecuencia de la señal excitadora es 68.56 Hz.
Teniendo los espectros, procedimos a medir las frecuencias y sus amplitudes para obtener
la siguiente grafica, similar a la forma como se avaluaron los datos experimentales.
98

50
40
....,. 30 N
N lO
"O :::::¡ ..... a. E20 <(
o ....,. NO oolO
00 10 ....,.
40 45 50
Fig.3.51
columna de la esquina (pabellon Q)
(J)
r-...- co co ....,.
(J)
Meo ('1)
00 lO co
o N r-r- lO 00 . co .lO ('1) lO lO ....,.
(J)
lO
r-lO
55 60 65 70
frecuencia (Hz)
00 N o 00 e co 00 r-
75 80 85 90 95 100
Gráfica de frecuencia versus amplitud relativa simulada. Hemos barrido de 45 Hz para adelante con la intención de compararlo con las medidas experimentales
99

Tabla 3. 7.- La tabla muestra la comparación de los picos obtenidos experimentalmente (figura
3.47) con los picos de la simulación (figura 3.51).
Frecuencia Frecuencia de la experimental (Hz) simulación (Hz) 45.79 45.64 49.62 48.82 50.72 50.40 53.83 52.24 54.38 53.87 55.85 55.70 58.23 57 59.33 59.41 62.81 61.79 64.82 65.25 68.3 68.33 73.79 69.46 82.76 80.08
Teniendo en cuenta de la simulación que la frecuencia natural de la estructura es del orden de uno a dos hertz, entonces procedimos a buscarlo en los espectros analizados.
100

200
Q) -o
ª a. E N <( I
100 (")
~
o 5 10 15 20 25 30 35 40 45 50
Frequency (Hz)
Fig.3.52
Mostramos la muestra 0-9-30, de la Señal 0-10. Note que al realizar su transformada de Fourier la frecuencia fundamental es 1.83Hz.
101

~ "' ~ ~
Fig.3.53
200
100 ~ o N
o 5 10 15 20 25 30 35 40 45 50
Frequency (Hz)
Mostramos la muestra 0-20-30, de la Señall0-20. Note que al realizar su transformada de Fourier
la frecuencia fundamental es 2.01Hz.
102

Fig.3.54
200
N ::I: <') Cl()
~~V '•w ~~~ ~~, 1 .
100 ~
o 5 10 15 20 25 30 35 40 45 50
Frequency (Hz)
Mostramos la muestra 0-1-43, de la Señal20-30. Note que al realizar su transformada de Fourier la frecuencia fundamental es l. 83Hz.
103

200
Q) "O ::J ~
c.. E <(
100
o
Fig.3.55
N J: ..-o N
5 10 15 20 25 30
Frequency (Hz)
35 40 45 50
Mostramos la muestra 0-47-40, de la Señal30-40. Note que al realizar su transformada de Fourier la frecuencia fundamental es 1.83Hz.
104
Q) "C ::J :!: a. ~
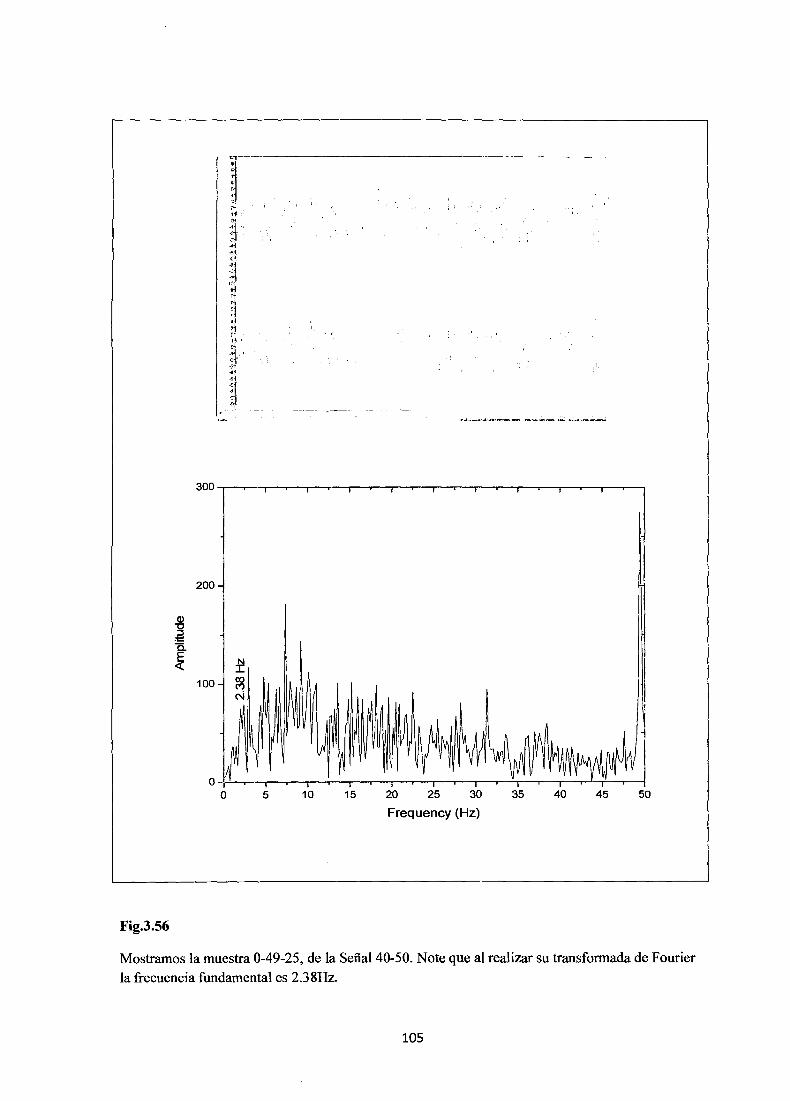
Fig.3.56
200
100
r . o _,
~
10 15 20 25 30
Frequency (Hz)
35 40 45 50
Mostramos la muestra 0-49-25, de la Señal40-50. Note que al realizar su transformada de Fourier la frecuencia fundamental es 2.3 8Hz.
lOS

Fig.3.57
_,
"
o 5 10 15 20 25 30 35 40 45 50
Frequency (Hz)
Mostramos la muestra 0-38-50, de la Señal50-60. Note que al realizar su transformada de Fourier la frecuencia fundamental es 2Hz.
106
100
Q) -o :::¡ ~
a. ~
~ 50 ~ ..-
o 5 10 15 20 25 30 35 40 45 50
Frequency {Hz)
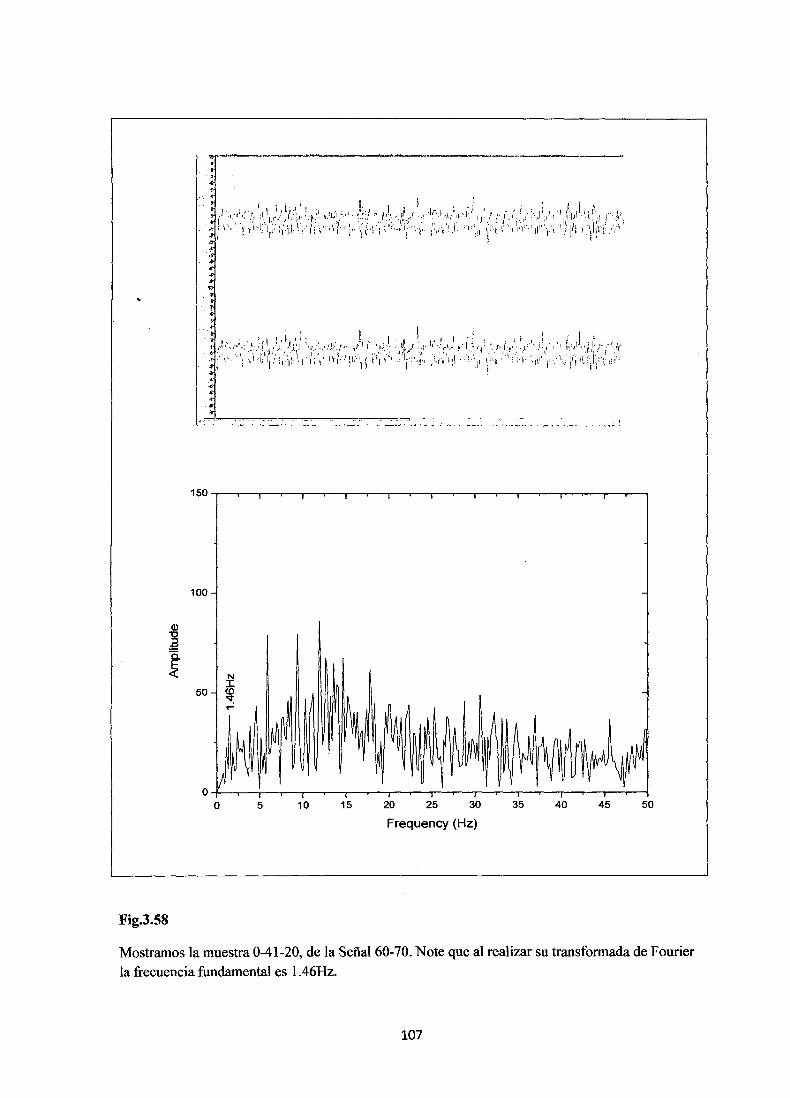
Fig.3.58
Mostramos la muestra 0-41-20, de la Señal 60-70. Note que al realizar su transformada de Fourier
la frecuencia fundamental es 1.46Hz.
107

Q) -e
~ a. E <(
Fig.3.59
·1 ¡'
. . ?::.~~-::-~-:-:~\.._..:~-:.,..,~~m
100
N :e M (l()
80
60
40
20
0+-~-.~-.r-r-.-~-.--------~,--.--~--.---~~ o 5 10 15 20 25 30
Frequency (Hz)
35 40 45 50
Mostramos la muestra 0-25-50, de la Señal 70-80. Note que al realizar su transformada de Fourier la frecuencia fundamental es 1.83Hz.
108

100
Q) "'O
ª a. E <{
50
Fig.3.60
~· 11ltdtijl&~\J.~ ~J!iill.1...ii\~~~~~-J ~~rr1 ¡~1~T'W'1~tft1"n~'rt~fl 1~lTl\Tnl~1''1
N :I: ~ ~
o 5 10 15 20 25 30
Frequency (Hz)
35 40 45 50
Mostramos la muestra 0-41-20, de la Señal 80-90. Note que al realizar su transformada de Fourier
la frecuencia fundamental es 1.5Hz.
109

:-a(j
·-50
3000 ,..-----r-----,,---.,.---,-----,,---...,----r--.-----r---..,
1.65 Hz
2000
Q)
"O ::;:¡
:!::: 0..
E <(
1000
20 40 60 80 100
Frequency (Hz)
Fig.3.61
Mostramos la muestra 0-9-53, de la Señal90-100. Note que al realizar su transformada de Fourier
la frecuencia fundamental es 1.65Hz.
110

Tabla3.8
Señal Frecuencia fundamental (Hz)
0-10 1.83
10-20 2.01
20-30 1.83
30-40 2.01
40-50 2.38
50-60 2
60-70 1.46
70-80 1.83
80-90 1.5
90-100 1.6
ffundamental = 1.85 + 0.28Hz
CAPITULO S
OBSERVACIONES, CONCLUSIONES Y RECOMENDACIONES
l. Observaciones
Para las evaluaciones trabajamos con una PC Corel2duo de 2.13GHz y 0.99GB de
RAM y usamos dos programas el ORIGIN 6.0 y el NERO W A VE-EDITOR
111

11. Conclusiones
a) De la figura 3.8 podemos concluir que el detector (LPD) si mide las vibraciones del
edificio.
b) De la figura 3.16 y 3.17 podemos concluir que en BBN y BBS existe un casi
continuo entre 15 y 16Hz, es decir las frecuencias en este rango salen en casi todos
los espectros evaluados.
e) ·· De la figura 3.18 y 3.19 concluimos que existe diferencias al medir en BBN y BBS
ya que entre O y 10Hz obtenemos mayor cantidad de picos máximos en BBN, que
enBBS.
d) Analizando de O a 1OHz, concluimos que el pico preponderante para el BBS es
5.33Hz con un peso de 9, de los 300 espectros evaluados (ver figura 3.21) y el pico
preponderante en BBN es 5.01Hz con un peso de 65, de los 600 espectros
evaluados (ver figura 3.27).
e) De la figura 3.18 y 3.19 también concluimos que el pico máximo preponderante en
promedio para el BBS es 15.6Hz, con una desviación estándar de 0.3Hz y para el
BBN es 15.7Hz con una desviación estándar de 0.2Hz.
f) De la figura 3.20 y 3.26 concluimos que la frecuencia preponderante para el BBN
es 15.50Hz con un peso de 125 (de los 600 espectros evaluados), mientras que la
frecuencia preponderante para el BBS es 15.82Hz con un peso de 51 (de los 300
espectros evaluados).
g) De la figura 3.4 7 podemos concluir que para la estructura analizada (pabellón Q FIEE UNI) el sensor LPD detecta frecuencias desde los 45Hz.
h) De la tabla 3.7 podemos concluir que muchos de los picos obtenidos experimentalmente también se obtienen al realizar la simulación.
i) De la figura 3.61 podemos concluir que usando la técnica LPD si se obtiene la
frecuencia fundamental de la estructura.
112

BIBLIOGRAFIA
l. Aníbal Valera, Edward Romero, José Florindez "Detection ofbuilding vibration applying laser photo deflection response" TECNIA vol. 18, N° 1, pp 21-28, enero-junio de 2008.
2. Anibal Valera, Arturo Ortiz " Evaluation of structurg vibration using an optical non conventional method "TECNIA vol. 17, N° 2, pp 4 7-54, Dic. 2007.
3. Arturo Ortiz Vargas Machuca "Estudio de vibraciones estructurales por métodos ópticos" /tesis de ingemería física/Fac. Ciencias/UN!. Nov. 2008.
4. Mario Paz "Dinámica estructural" editorial reverte, pp. 219, 220, 230, 285. New York2002.
5. Javier Pique del Pozo, Hugo Scaletti Farina "Análisis sísmico de edificios" libro 9, colección del ingeniero civil1990-1991, pp. 3-1, 3-2, Lima-Perú.
6. Luis Enrique García Reyes "Dinámica estructural aplicada al diseño sísmico", pp. 13-14, octubre 1999, Bogotá-Colombia .
. 7. Ray W. Clough, Joseph Penzien "Dynamics ofstructures", pp 1-3,33-44,65-72, computers and structures 2003.
8. Manual del ETABS "www.manualespdf.es"
113