universidad autónoma de baja californiafcqi.tij.uabc.mx/usuarios/jjesuslg/lmep.pdf · 3.- ¿que...
TRANSCRIPT

Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Manual de Prácticas
Laboratorio de Máquinas Eléctricas
Elaboró: Revisión:Juan Jesús López García Diciembre 2009
Comentarios y sugerencias: [email protected]

Práctica 1. Partes Constitutivas de Máquinas Eléctricas 2
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 1
PARTES CONSTITUTIVAS DE MÁQUINAS ELÉCTRICAS
Objetivo: Reconocer las partes físicas de las máquinas eléctricas más comúnmente empleadas en desarrollos tecnológicos de la industria electrónica así como las leyes en las que basan su funcionamiento.
Material: - 1 motor de c.d. - 1 motor de c.a. - 1 motor a pasos - Un multímetro y puntas para multímetro - Medidor de LCR - Un par de cables con banana y caimán - Juego de desarmadores Introducción La primer máquina eléctrica de que se tiene conocimiento es la rueda de Barlow, fue construida hacia 1828 por el matemático y físico inglés Peter Barlow (1776 ó 1766-1862), consistía de un disco metálico colocado en un campo magnético el cuál giraba en torno a su eje. Michael Faraday (1791-1867), químico y físico inglés, descubrió (1831 ó 1855) el fenómeno de inducción magnética e invirtiendo la rueda de Barlow, construyó el aparato conocido como disco de Faraday que fue la primera dínamo conocida. Joseph Henry (1797-1878), físico estadounidense, descubrió el fenómeno de la autoinducción, fundamento de los generadores eléctricos y Nikola Tesla (1857-1943), físico yugoslavo, descubrió el principio de los campos magnéticos rotatorios mediante el cuál diseñó motores y generadores de inducción, con éste último se desarrolló una forma eficiente de generar corriente eléctrica por medios mecánicos-magnéticos. Procedimiento Verificación del Dispositivo Identifique las características impresas en el cuerpo del motor (en caso de existir) y transcríbalas:
UABC Máquinas Eléctricas
Práctica 1. Partes Constitutivas de Máquinas Eléctricas 3
Desarme cuidadosamente el motor de CD. Realice un bosquejo isométrico de las partes que lo componen indicando el nombre técnico de cada una de ellas: Dibuje un diagrama mecánico-eléctrico del motor, para ello determine la interconexión eléctrica entre elementos mediante una inspección visual y corroborar usando un óhmetro, mida la resistencia eléctrica e inductancia de los embobinados y reporte en el esquema los valores:

UABC Máquinas Eléctricas
Práctica 1. Partes Constitutivas de Máquinas Eléctricas 4
Cuestionario 1.- Defina en forma clara y concisa el uso en una máquina rotatoria de los siguientes elementos:
a) Armadura b) Campo c) Rotor d) Estator
e) Delga f) Entrehierro g) Conmutador h) Escobilla
i) Polo j) Inducido k) Inductor
2.- Para la interconexión entre campo y armadura de un motor de cd; dibuje el diagrama de interconexión e indique ventajas y desventajas de una respecto a las otras para las siguientes conexiones: a) shunt ó derivación, b) serie,
c) serie compuesto
3.- ¿Que ventajas posee un motor de cd de imán permanente con respecto a uno de bobina de campo? 4.- ¿Que ventajas posee un motor de cd con bobina de campo con respecto a uno de imán permanente? 5.- ¿Que ventajas posee un motor de cd con mayor cantidad de bobinas en la armadura y segmentos del
conmutador respecto a uno con menor cantidad? 6.- ¿Que ventajas posee un motor de cd con menor cantidad de bobinas en la armadura y segmentos del
conmutador respecto a uno con mayor cantidad? Conclusiones
Práctica 2. Caracterización de Motor Eléctrico 5
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 2
CARACTERIZACIÓN DE MOTOR ELÉCTRICO
Objetivo: Determinar las características físicas de un motor eléctrico de c.d., un motor eléctrico de c.a., y un motor a pasos y determinar las ecuaciones que describen sus respectivos comportamientos.
Material: - 1 motor de c.d. de voltaje máximo conocido
- IGFET de características requeridas - resistencias del valor requerido - encoder digital (véase el apéndice C) - Osciloscopio y puntas para osciloscopio - Multímetro y puntas para multímetro - Fuente de voltaje y puntas para fuente - Generador de funciones y puntas para generador - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción El desarrollo electrónico tiene por naturaleza, la búsqueda de un uso más eficiente de la energía; los motores eléctricos son transductores que convierten energía eléctrica en mecánica, toda conversión tiene -en mayor o menor grado- conversiones de energía no deseadas conocidas como pérdidas (en forma de calor principalmente), por lo que los desarrollos electrónicos tienden a suprimir los elementos mecánicos, ejemplo de ello ha sido la sustitución de las unidades de disco flexible y CD por las unidades de memoria semiconductora no volátil, se prevé que lo mismo ocurrirá con las unidades de DVD en un futuro cercano. Las ventajas son significativas: mayor duración de las baterías de los sistemas portátiles, mayor resistencia a los impactos, mayor tiempo de vida útil de la unidad reproductora, menor peso y, en especial, menor degradación del medio de almacenamiento. Sin embargo existen aplicaciones en donde la conveniencia del uso de motores es extraordinaria, tal es el caso de los discos duros para computadora en donde la relación entre velocidad de acceso, capacidad de almacenamiento y costo es aun incomparable con medios no electromecánicos. Otros ejemplos del uso necesario de motores se presentan en procesos cuya naturaleza es completamente mecánica, como son: forzar el movimiento de aire para ventilar una habitación, el movimiento de la hoja de papel dentro de una máquina copiadora, el cierre de la mano y giro de un brazo robot para inserción automática.
UABC Máquinas Eléctricas
Práctica 2. Caracterización de Motor Eléctrico 6
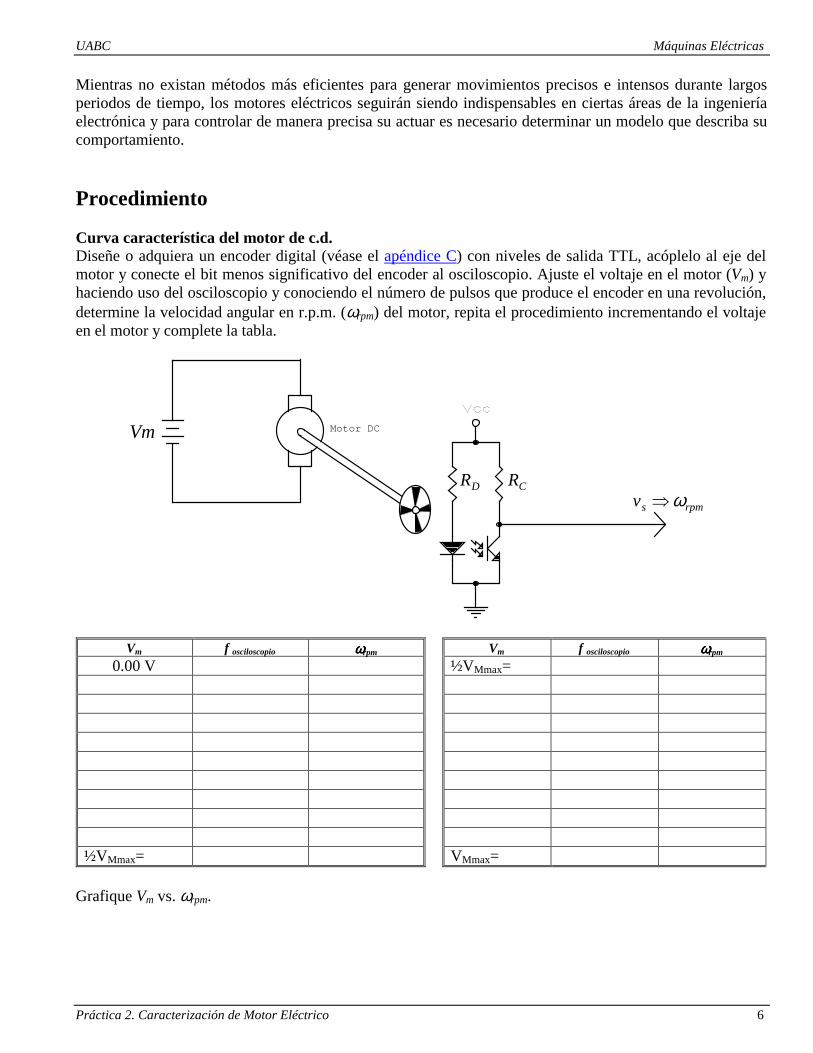
Mientras no existan métodos más eficientes para generar movimientos precisos e intensos durante largos periodos de tiempo, los motores eléctricos seguirán siendo indispensables en ciertas áreas de la ingeniería electrónica y para controlar de manera precisa su actuar es necesario determinar un modelo que describa su comportamiento. Procedimiento Curva característica del motor de c.d. Diseñe o adquiera un encoder digital (véase el apéndice C) con niveles de salida TTL, acóplelo al eje del motor y conecte el bit menos significativo del encoder al osciloscopio. Ajuste el voltaje en el motor (Vm) y haciendo uso del osciloscopio y conociendo el número de pulsos que produce el encoder en una revolución, determine la velocidad angular en r.p.m. (ωrpm) del motor, repita el procedimiento incrementando el voltaje en el motor y complete la tabla.
CRDR
Motor DC
rpmsv ω⇒
Vm
Vm f osciloscopio ωωωωrpm Vm f osciloscopio ωωωωrpm 0.00 V ½VMmax=
½VMmax= VMmax=
Grafique Vm vs. ωrpm.

UABC Máquinas Eléctricas
Práctica 2. Caracterización de Motor Eléctrico 7
a
a De la curva característica que obtuvo determine los parámetros del motor y una ecuación que describa el comportamiento de velocidad respecto al voltaje de entrada e indique el rango de validez de la misma:
<<
= V m
mV
ω
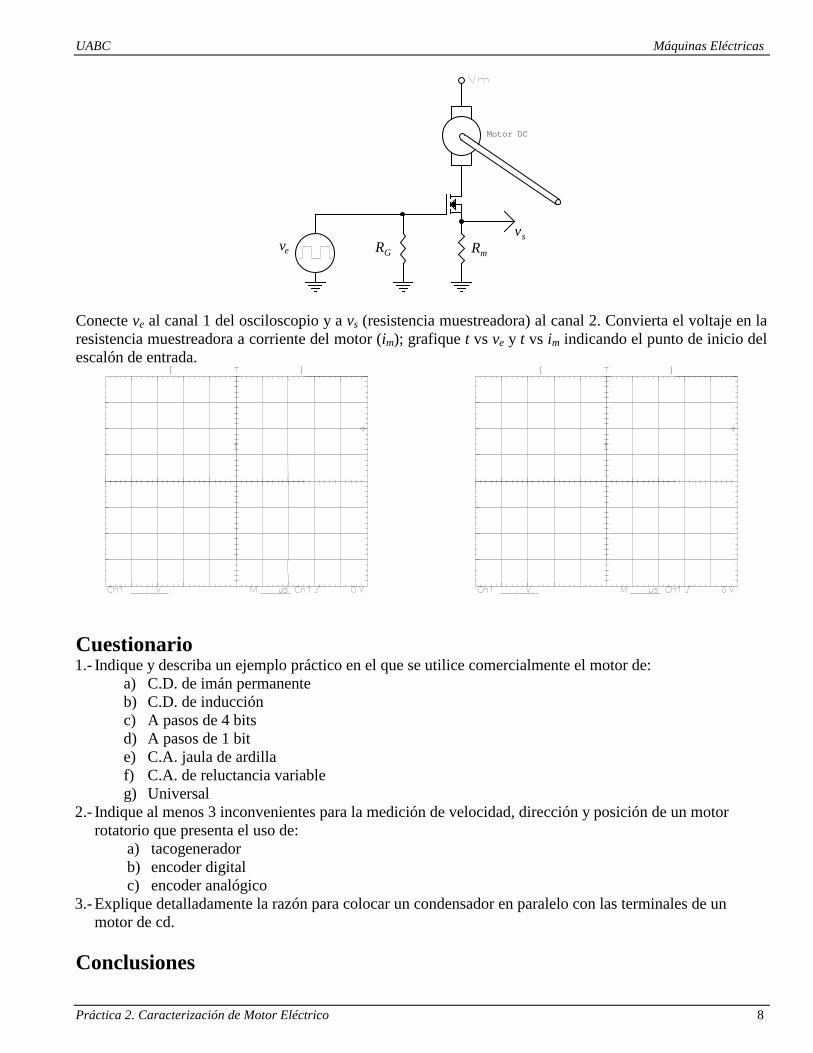
Grafique esta ecuación sobre la misma respuesta experimental como medio de comparación. Transitorio de Corriente en Respuesta al Escalón en un Motor de c.d. Sea rm la resistencia interna que muestra el motor; diseñe un circuito conmutador controlado por voltaje como el mostrado en la figura, use mm rR ⋅≅ 10
1 como resistencia de muestreo; la conmutación del motor debe operar con niveles TTL (interruptor abierto con ‘0’ lógico y cerrado con ‘1’ lógico), calcule la disipación de potencia en los elementos de tal forma que el conjunto opere satisfactoriamente (en caso necesario instale disipador de calor con las características requeridas al transistor). Conecte la salida digital (nivel TTL) del generador de funciones, a la entrada del interruptor controlado por voltaje, ajuste a una frecuencia extremadamente baja (suficientemente baja para que la velocidad del motor llegue a su máximo antes de que la señal de entrada cambie de estado).
UABC Máquinas Eléctricas
Práctica 2. Caracterización de Motor Eléctrico 8
ev GR
Motor DC
mRsv
Conecte ve al canal 1 del osciloscopio y a vs (resistencia muestreadora) al canal 2. Convierta el voltaje en la resistencia muestreadora a corriente del motor (im); grafique t vs ve y t vs im indicando el punto de inicio del escalón de entrada.
Cuestionario 1.- Indique y describa un ejemplo práctico en el que se utilice comercialmente el motor de:
a) C.D. de imán permanente b) C.D. de inducción c) A pasos de 4 bits d) A pasos de 1 bit e) C.A. jaula de ardilla f) C.A. de reluctancia variable g) Universal
2.- Indique al menos 3 inconvenientes para la medición de velocidad, dirección y posición de un motor rotatorio que presenta el uso de:
a) tacogenerador b) encoder digital c) encoder analógico
3.- Explique detalladamente la razón para colocar un condensador en paralelo con las terminales de un motor de cd.
Conclusiones

Práctica 3. Caracterización de Generador Eléctrico 9
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 3
CARACTERIZACIÓN DE GENERADOR ELÉCTRICO
Objetivo: Determinar las características físicas de un generador c.d., y un generador de c.a. y determinar las ecuaciones que describen sus respectivos comportamientos.
Material: - motor de cd - tacogenerador - encoder digital
- Multímetro y puntas para multímetro - Osciloscopio y puntas para osciloscopio - Fuente de voltaje y puntas para fuente - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción La actual sociedad basa su desarrollo en el uso de la energía eléctrica, la vivencia de una sociedad como la nuestra sería impensable sin este recurso. Dentro del ámbito de la electrónica se han desarrollado elementos capaces de generar electricidad sin el requerimiento de movimientos mecánicos, lográndose dispositivos generadores a partir de fuentes de energía renovables (celdas solares, pilas atómicas, termopilas), sin embargo hasta el momento tales dispositivos no poseen la eficiencia para dotar de altas densidades de fluido eléctrico y su operación se ve limitada a condiciones ambientales y de seguridad muy particulares, por ejemplo: luz solar casi permanente como el caso de satélites de comunicaciones, requerimientos extremadamente reducidos de energía como el caso de algunas calculadoras, o en aquellas aplicaciones en donde al término de la vida útil, la destrucción del sistema no afectará al medio ambiente inmediato como es el caso de las pilas atómicas usadas en exploraciones espaciales lejanas; esto reduce su uso a elementos sensores (de intensidad luminosa, radiaciones atómicas y de temperatura) principalmente. La generación de altas densidades de fluido eléctrico que la sociedad demanda solo ha sido posible mediante elementos electromecánicos conocidos como generadores eléctricos; estos elementos basan su funcionamiento en los principios electro-magnéticos para la generación de cargas eléctricas por lo que requieren de movimiento mecánico para operar. En términos generales existen dos tipos de generadores electromecánicos de fluido eléctrico, a) dínamos (generadores), los cuáles producen una señal de corriente directa y, b) alternadores, que producen señales
UABC Máquinas Eléctricas
Práctica 3. Caracterización de Generador Eléctrico 10
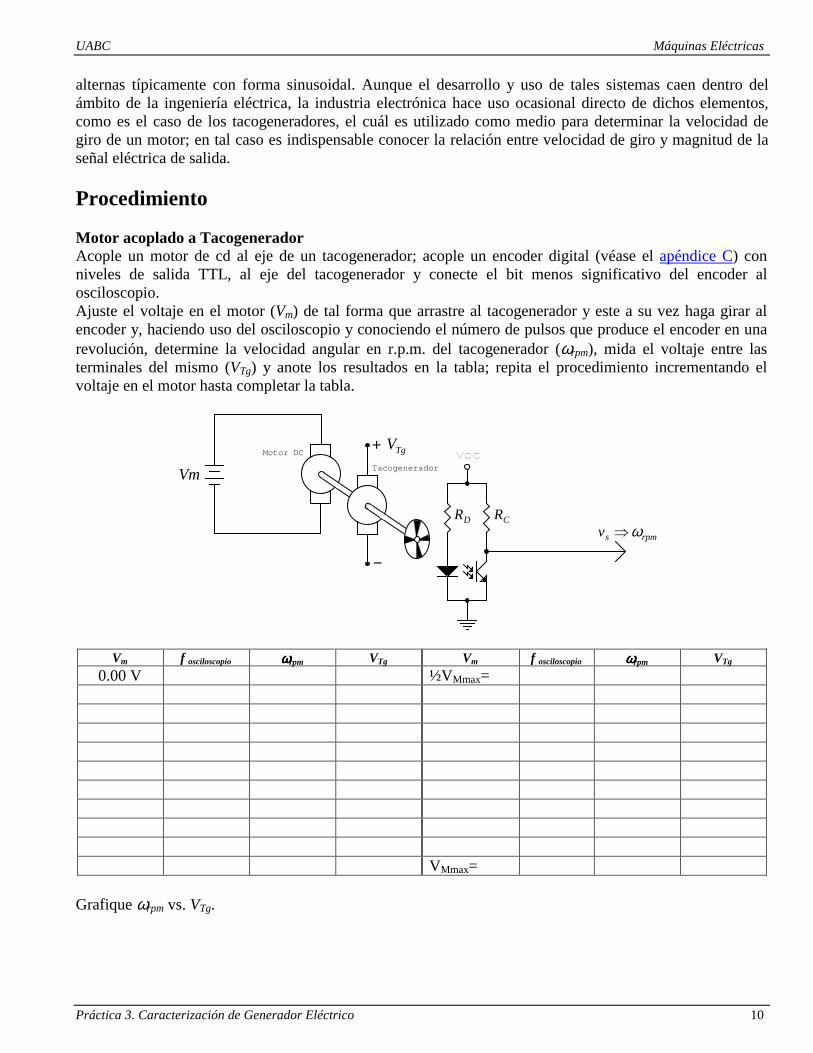
alternas típicamente con forma sinusoidal. Aunque el desarrollo y uso de tales sistemas caen dentro del ámbito de la ingeniería eléctrica, la industria electrónica hace uso ocasional directo de dichos elementos, como es el caso de los tacogeneradores, el cuál es utilizado como medio para determinar la velocidad de giro de un motor; en tal caso es indispensable conocer la relación entre velocidad de giro y magnitud de la señal eléctrica de salida. Procedimiento Motor acoplado a Tacogenerador Acople un motor de cd al eje de un tacogenerador; acople un encoder digital (véase el apéndice C) con niveles de salida TTL, al eje del tacogenerador y conecte el bit menos significativo del encoder al osciloscopio. Ajuste el voltaje en el motor (Vm) de tal forma que arrastre al tacogenerador y este a su vez haga girar al encoder y, haciendo uso del osciloscopio y conociendo el número de pulsos que produce el encoder en una revolución, determine la velocidad angular en r.p.m. del tacogenerador (ωrpm), mida el voltaje entre las terminales del mismo (VTg) y anote los resultados en la tabla; repita el procedimiento incrementando el voltaje en el motor hasta completar la tabla.
CRDR
Motor DC
rpmsv ω⇒
Vm Tacogenerador
TgV
−
+
Vm f osciloscopio ωωωωrpm VTg Vm f osciloscopio ωωωωrpm VTg 0.00 V ½VMmax=
VMmax=
Grafique ωrpm vs. VTg.

UABC Máquinas Eléctricas
Práctica 3. Caracterización de Generador Eléctrico 11
a
a De la curva característica obtenida determine los parámetros del tacogenerador y obtenga la ecuación que describe el comportamiento del voltaje generado respecto a la velocidad de giro:
<<
=
ωωTgV
Grafique esta ecuación sobre la misma respuesta experimental como medio de comparación.
Cuestionario 1.- Describa detalladamente el proceso electromagnético mediante el cuál producen corriente eléctrica los
generadores eléctricos usados en: a) bicicletas b) automóviles
c) central termoeléctrica
2.- ¿Que características mecánico-eléctricas posee un tacogenerador que no tiene un dínamo convencional? Conclusiones
Práctica 4. Control de Motor de CD. 12
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 4
CONTROL DE MOTOR DE C.D.
Objetivo: Diseñar y verificar técnicas comunes para control de motores de c.d. Material: - 1 motor de c.d. de características conocidas
- resistencias, transistores y compuertas lógicas de características requeridas - Multímetro y puntas para multímetro - Fuente lineal de voltaje y puntas para fuente - Osciloscopio y puntas para osciloscopio - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción La interconexión de un motor de C.D. a la fuente de alimentación mediante un interruptor de estado sólido es la técnica más eficiente para encender o apagar un motor, si esto se realiza mediante la técnica de modulación de ancho de pulso entonces es posible modificar la velocidad de giro y si se agrega un conjunto de elementos interruptores en la forma conocida como puente H, se tiene además la capacidad de cambiar el sentido de giro. Todos estos elementos y la conveniente lógica digital, convierten al motor en un elemento de fácil manipulación con un gran número de posibles aplicaciones. Procedimiento Puente H, PWM y Lógica de Control Diseñe (incluya el diseño en el reporte) e interconecte los siguientes circuitos:
a) multivibrador astable con periodo (T) igual o menor a 1/10 de la constante de tiempo prevaleciente del motor, ciclo de trabajo de 0 a 100% ajustable por voltaje (use un potenciómetro conectado a la alimentación como fuente de voltaje variable);
b) un circuito lógico con 3 entradas que cumpla las condiciones indicadas en la tabla y,
A2 A1 A0 S1 S0 Operación 0 0 Q 0 0 Paro 0 1 Q 0 Q Giro a derecha 1 0 Q Q 0 Giro a izquierda 1 1 Q S1 S0 La condición anterior se mantiene

UABC Máquinas Eléctricas
Práctica 4. Control de Motor de C.D. 13
c) un circuito puente-H basado en transistores (el esquema da una sugerencia); calcule la disipación de potencia en los transistores y agregue disipador de calor en caso de ser necesario.
Motor DC
vR
A1
A0
pR
nR nR
1S
0S
pR
Astablesalida delControl de
uR uR
Q
2A
trabajociclo de
Astable con
variable
ev
Alimente todo el circuito con una única fuente de alimentación, en caso de requerir voltajes menores, obténgalos a partir de la fuente principal usando regulador zener con resistencia y transistor. Compruebe la operación del conjunto, reportando la forma de onda, amplitud, frecuencia y ciclo de trabajo en Q, S1 y S0 si A2=0, A1=1 y: a) ve=¾Vcc, b) ve=½Vcc, c) ve=¼Vcc y, d) ve=0.
Q
S1 y S0
UABC Máquinas Eléctricas
Práctica 4. Control de Motor de C.D. 14
Q
S1 y S0
Cuestionario 1.- ¿Qué ventajas presenta un circuito puente H basado en FET sobre uno basado en BJT? 2.- ¿Qué ventajas presenta un circuito puente H basado en BJT sobre uno basado en FET? 3.- ¿Qué ventajas presenta un circuito puente H basado en IGBT sobre uno basado en FET ó BJT, que
desventajas posee? 4.- Investigue la existencia de 3 diferentes circuitos integrados comerciales para el control de velocidad y
dirección de motores de c.d., haga una tabla con el código y las principales características técnicas de cada uno de ellos como medio de comparación. Anexe el diagrama del circuito eléctrico y la figura del encapsulado de cada uno de ellos.
Conclusiones
Práctica 5. Control de Motor a Pasos. 15
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 5
CONTROL DE MOTOR A PASOS
Objetivo: Diseñar y verificar técnicas para el control de motores a pasos. Material: - 1 motor a pasos de 4 bits (unipolar) y características conocidas
- resistencias, transistores y CI digitales de características requeridas - Multímetro y puntas para multímetro - Fuente lineal de voltaje y puntas para fuente - Osciloscopio y puntas para osciloscopio - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción Los motores a pasos son elementos que se activan aplicando pulsos de voltaje sobre sus bobinas La interconexión de un motor a pasos a la fuente de alimentación mediante un interruptor de estado sólido es la técnica más eficiente para activarlo, el control de dirección, velocidad e inclusive, torque, se realiza mediante un grupo de pulsos eléctricos sincronizados. La secuencia y velocidad de estos pulsos se realiza mediante lógica digital, convirtiendo al motor en un elemento de fácil manipulación y múltiples aplicaciones. Procedimiento Control de Velocidad y Dirección de Motor a Pasos Diseñe e interconecte los siguientes circuitos:
a) temporizador con frecuencia variable para ajustar la velocidad del motor; la frecuencia de oscilación debe variar entre ~ 0 Hz y Hz;
b) un circuito lógico con 3 entradas que cumpla las condiciones indicadas en la tabla y,
A2 A1 A0 S3 S2 S1 S0 Operación 0 0 Q 0 0 0 0 Paro 0 1 Q Q-3 Q-2 Q-1 Q0 Giro a derecha 1 0 Q Q0 Q-1 Q-2 Q-3 Giro a izquierda 1 1 Q S3 S2 S1 S0 La condición anterior se mantiene

UABC Máquinas Eléctricas
Práctica 5. Control de Motor a Pasos. 16
c) un circuito manejador basado en transistores (como el mostrado en el esquema) para alimentar un motor a pasos de 2 ó 4 fases de Voltaje y corriente máxima por fase de mA, agregue diodos rectificadores en contra sentido en caso de que el IGFET no los incluya.
vR
A1
A0
Astablesalida delControl de
uR uR
Q
2A
variablefrecuenciaAstable con
ev
GR
GR
GR
GR
3S2S1S0S
Compruebe la operación del conjunto, reportando la forma de onda, amplitud y frecuencia en Q, S3, S2, S1 y S0, si A2=0, A1=1 y: a) 75% de la frecuencia máxima, b) 50% de la frecuencia máxima, c) 25% de la frecuencia máxima.
Q
S3, S2, S1 y S0

UABC Máquinas Eléctricas
Práctica 5. Control de Motor a Pasos. 17
Q
S3, S2, S1 y S0
Q
S3, S2, S1 y S0
Cuestionario 1.- Indique las características técnicas del motor a pasos empleado (voltaje y corriente de operación,
resistencia de los devanados, ángulo por paso). 2.- Clasifique los tipos de motores a pasos en forma de diagrama de árbol. 3.- Explique detalladamente el funcionamiento de los motores a pasos bipolares. 4.- Explique el proceso para invertir la dirección de giro en motores a pasos bipolares 5.- Si los FET requieren únicamente voltaje en la compuerta para controlar la corriente en el drenaje,
explique la razón para colocar una resistencia entre compuerta y “tierra”. 6.- Explique detalladamente la razón para colocar un diodo rectificador en contrasentido al flujo de corriente
entre drenaje y fuente del transistor en el circuito con motor. 7.- Elabore una tabla que incluya número de parte, principales características técnicas, esquema electrónico
y tipo de encapsulado de 3 diferentes circuitos integrados comerciales para control de motores a pasos: a) unipolares y, b) bipolares.
Conclusiones

Práctica 6. Control de Motor de C.A. 18
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 6
CONTROL DE MOTOR DE C.A.
Objetivo: Diseñar y verificar técnicas comunes para control de motores de c.a. Material: - 1 motor de c.a.
- Triac de las características requeridas - Optotriac de las características requeridas - Resistencias del valor requerido - Circuitos digitales de las características requeridas - Multímetro y puntas para multímetro - Fuente lineal de voltaje y puntas para fuente - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción El control de velocidad, dirección y torque en motores de CA requiere el uso de interruptores de estado sólido basados en transistores de efecto de campo o hacer uso de elementos tiristores como son los SCR y TRIAC entre otros. Procedimiento Optoacoplador y Lógica de Control Diseñe (incluya el diseño en el reporte) e interconecte los siguientes circuitos:
a) Manejador de carga en CA usando TRIAC b) Manejador de TRIAC usando OPTOTRIAC (manejo de CA mediante CD) c) Circuito lógico con dos entradas que cumpla con las condiciones indicadas en la tabla
E A S Operación 0 0 1 Apagado 0 1 1 Apagado 1 0 0 Encendido 1 1 S La condición anterior se mantiene

UABC Máquinas Eléctricas
Práctica 6. Control de Motor de C.A. 19
ArranqueParo y
Control de CASA
E
RT
RDRuRu
Alimente el circuito digital con una única fuente de alimentación (en caso de requerir voltajes menores, obténgalos a partir de la fuente principal usando regulador zener con resistencia y transistor). Alimente el motor de CA con el voltaje requerido. Compruebe la operación del circuito reportando voltajes en los puntos indicados y observando la operación del motor bajo las condiciones del Control de Paro y Arranque mostradas, llene la parte correspondiente de la tabla.
E A S (Volts) Voltaje en Optotriac Voltaje en RT Voltaje en
Triac Voltaje en
Motor Operación de Motor
0 0 0 1 1 0 1 1
Cuestionario 1.- Dibuje el esquema de un relevador electromecánico y explique el funcionamiento interno. 2.- Dibuje el esquema de un relevador de estado sólido y explique el funcionamiento interno. 3.- ¿Qué desventajas presenta el uso de un control basado en relevadores electromecánicos sobre uno de
estado sólido? 4.- ¿Qué desventajas presenta el uso de un control basado en TRIAC sobre uno basado en relevadores de
estado sólido? 5.- ¿Qué desventajas presenta el uso de un control basado en relevadores de estado sólido sobre uno basado
en TRIAC? Conclusiones
Práctica 7. Aplicaciones con Motores de C.D. 20
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 7
APLICACIONES CON MOTORES DE C.D.
Objetivo: Diseñar y verificar circuitos típicos para medición y control de motores de cd. Material: - resistencias del valor requerido
- condensadores del valor requerido - motor de cd - diodos rectificadores de las características requeridas - transistores BJT y/o FET de características conocidas - Circuitos integrados digitales de las características requeridas - Multímetro y puntas para multímetro - Fuente lineal de voltaje y puntas para fuente - Osciloscopio y puntas para osciloscopio - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción El conjunto formado por un circuito de control de motor y un medidor de velocidad y posición son partes fundamentales para la obtención de otro dispositivo conocido como servomotor. Procedimiento Ajuste y medición digital de velocidad Agregue al circuito de control de la práctica 4, un circuito para seleccionar velocidad, dicho ajuste deberá introducirse digitalmente (interruptores ó teclado hexadecimal). Agregue a la salida del encoder de la práctica 2, los circuitos necesarios para medir e indicar en (al menos) 3 dígitos de 7 segmentos la velocidad de giro del motor en rpm. Considere para ambos diseños la posibilidad de introducir y leer velocidades entre 000 y 999 rpm de tal forma que al encontrarse operando, ambos datos estén acordes.

UABC Máquinas Eléctricas
Práctica 7. Aplicaciones con Motores de C.D. 21
CR DR
velocidaddigital deLectura
pR
nR nR
pRMotor DC
A1
A01S
0SAstable
salida delControl de
uR uR
Q
2A
trabajociclo de
Astable con
variable
ciclo dedigital del
Ajuste
trabajo
Use el teclado (o los interruptores) y ajuste la velocidad a 0 rpm, con el osciloscopio mida la frecuencia y el ciclo útil aplicado al motor, apunte la velocidad indicada en la pantalla de dígitos, repita el procedimiento para cada velocidad y llene la siguiente tabla:
Teclado ó Interruptores (rpm)
Frecuencia (Hz)
Ciclo útil (%)
Lectura en pantalla (rpm)
0
41 de vel. máx.=
31 de vel. máx.=
21 de vel. máx.=
32 de vel. máx.=
43 de vel. máx.=
vel. máx.= Cuestionario 1.- Si se desea la misma aplicación usando la menor cantidad de hardware (uso mayoritario de software),
dibuje el esquema electrónico del sistema completo e indique la operación de cada una de las partes. 2.- Si se desea realizar la misma aplicación usando firmware, dibuje el esquema electrónico del sistema
completo e indique la operación de cada una de las partes. Conclusiones
Práctica 8. Aplicaciones con Motores de C.A. 22
Universidad Autónoma de Baja California
FACULTAD DE CIENCIAS QUÍMICAS E INGENIERÍA
Ing. en Electrónica
Laboratorio de Máquinas Eléctricas
Práctica No. 8
APLICACIONES CON MOTORES DE C.A.
Objetivo: Diseñar y verificar circuitos típicos de control de motores de ca. Material: - 1 motor de c.a.
- Triac de las características requeridas - Optotriac de las características requeridas - Resistencias del valor requerido - Circuitos digitales de las características requeridas - Multímetro y puntas para multímetro - Fuente lineal de voltaje y puntas para fuente - Tablilla para conexiones (protoboard) - Un par de cables con banana y caimán
Introducción Una de las técnicas de control de velocidad de motores de CA, es la modificación de la frecuencia de alimentación al motor. Un motor de CA que opera a 120 V y 60 Hz. verá reducida su velocidad si la frecuencia se reduce; circuitos que reproducen CA a partir de CA con frecuencia o voltaje diferente a la original se les conoce como convertidores CA a CA, si solo cambia la frecuencia se les conoce como cicloconvertidor, si la señal de CA se obtiene a partir de una señal de CD se le conoce como convertidor CD a CA. Procedimiento Ajuste y medición de velocidad Diseñe un astable con ciclo útil de 50% y frecuencia variable en el rango 0 a 60 Hz. Agregue los circuitos necesarios para ajustar la frecuencia del astable, dicho ajuste deberá introducirse digitalmente (interruptores ó teclado hexadecimal). La señal del astable conmutará al puente-H para generar la fundamental de la señal sinusoidal deseada, la señal se amplía en tensión y se filtra usando un transformador de subida. Agregue al eje del motor un encoder y los circuitos necesarios para medir e indicar en (al menos) 3 dígitos de 7 segmentos la velocidad de giro del motor en rpm.
UABC Máquinas Eléctricas
Práctica 8. Aplicaciones con Motores de C.A. 23
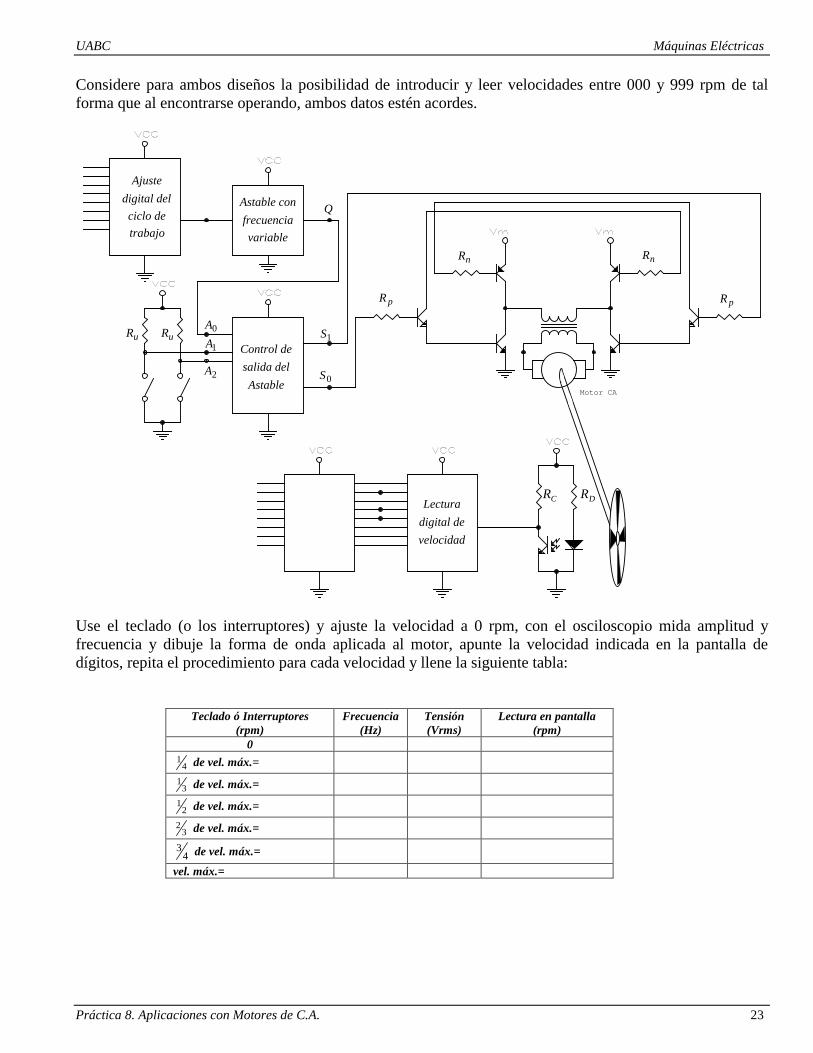
Considere para ambos diseños la posibilidad de introducir y leer velocidades entre 000 y 999 rpm de tal forma que al encontrarse operando, ambos datos estén acordes.
CR DR
velocidaddigital deLectura
pR
nR nR
pR
A1
A01S
0SAstable
salida delControl de
uR uR
Q
2A
variablefrecuenciaAstable con
ciclo dedigital del
Ajuste
trabajo
Motor CA
Use el teclado (o los interruptores) y ajuste la velocidad a 0 rpm, con el osciloscopio mida amplitud y frecuencia y dibuje la forma de onda aplicada al motor, apunte la velocidad indicada en la pantalla de dígitos, repita el procedimiento para cada velocidad y llene la siguiente tabla:
Teclado ó Interruptores (rpm)
Frecuencia (Hz)
Tensión (Vrms)
Lectura en pantalla (rpm)
0
41 de vel. máx.=
31 de vel. máx.=
21 de vel. máx.=
32 de vel. máx.=
43 de vel. máx.=
vel. máx.=

UABC Máquinas Eléctricas
Práctica 8. Aplicaciones con Motores de C.A. 24
4
1 de vel. máx.
3
1 de vel. máx.
2
1 de vel. máx.
3
2 de vel. máx.
4
3 de vel. máx.
vel. máx.
Cuestionario 1.- Investigue al menos tres técnicas de control de velocidad de motores de CA, determine subclases y
anótelas en forma de diagrama de árbol.

UABC Máquinas Eléctricas
Práctica 8. Aplicaciones con Motores de C.A. 25
2.- Realice una tabla comparativa de las ventajas y desventajas entre cada una de las técnicas de control de velocidad de motores de CA mencionadas en el punto anterior.
Conclusiones

Apéndice A. Obtención de Parámetros de Motores 26
Apéndice A OBTENCIÓN DE PARÁMETROS DE MOTORES Un método alternativo para determinar algunos de los parámetros del diodo semiconductor usando los resultados experimentales es el siguiente: sea la ecuación característica del diodo
−= 1DV
nKTq
oD eII
donde, si VD > 0 entonces la exponencial crece rápidamente y el término 1>>DVnKT
q
e por lo que una buena aproximación es
≅ DV
nKTq
oD eII ,
aplicando logaritmos en ambos lados de la ecuación se obtiene
( ) ( ) bmxyIInVnKT
qIIn oDD +=⇔+
=
que es la ecuación de una línea recta si VD es la variable independiente ( x ), ( )In ID la variable dependiente
( y ),
nKTq la pendiente de la recta ( m ) y ( )In Io es el cruce con el eje y . Por lo que si graficamos
DD IvsV en escala lineal obtendremos el primer gráfico, pero si lo hacemos en escala semilogarítmica se obtendrá el segundo gráfico.
0
1
2
3
4
5
6
7
0 0.1 0.2 0.3 0.4 0.5 0.7 0.8 0.90
1
2
3
4
5
6
7
0 0.1 0.2 0.3 0.4 0.5 0.7 0.8 0.9
r VId
D
D
= ∆∆
∆VD
∆ID
Vu
mA
V10-9
10-7
10-6
10-5
10-4
10-3
10-2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-9
-7
-6
-5
-4
-3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
∆ID
∆VD
Io
I∆∆V
qnKT
D
D
=
V
Amp
Del primer gráfico se determinan rd , Re , Rprom y Vu mientras que del segundo se obtiene la corriente de fuga ( I o ) y la constante de fabricación ( n ), para esto, se obtiene la pendiente del gráfico, se asignan valores a q K T, y y se despeja n de la ecuación.
Apéndice B. Obtención de Parámetros de Generadores 27
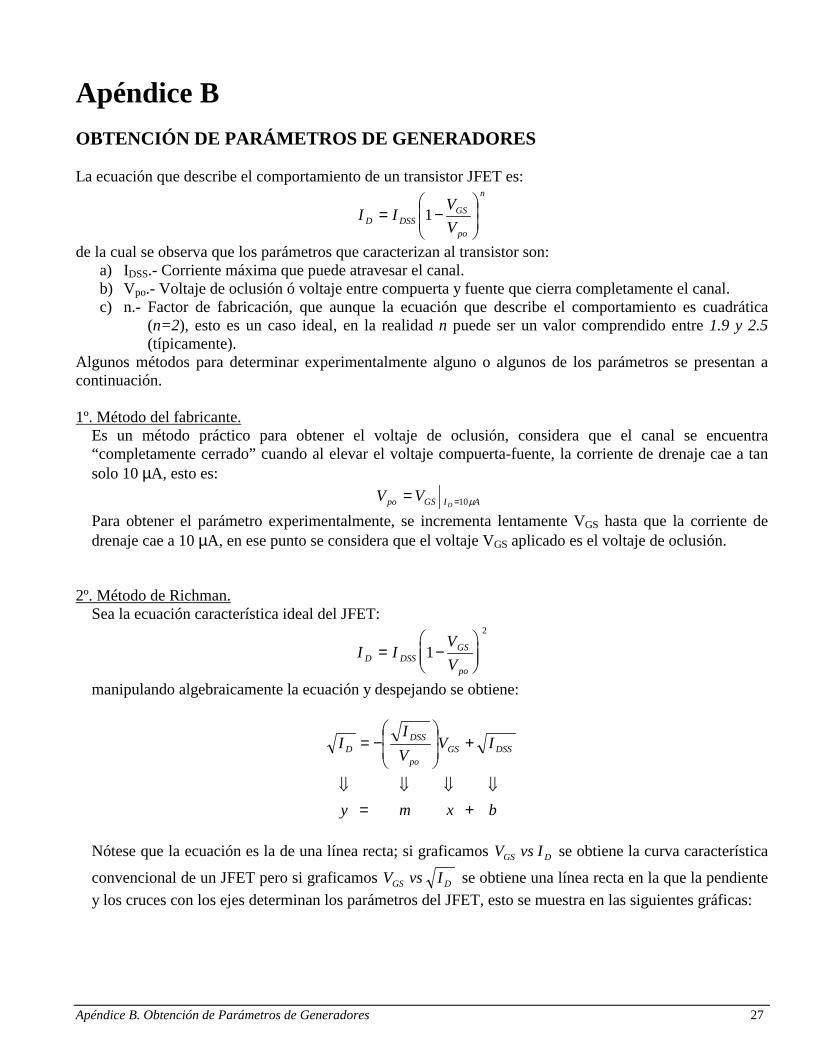
Apéndice B OBTENCIÓN DE PARÁMETROS DE GENERADORES La ecuación que describe el comportamiento de un transistor JFET es:
n
po
GSDSSD V
VII
−= 1
de la cual se observa que los parámetros que caracterizan al transistor son: a) IDSS.- Corriente máxima que puede atravesar el canal. b) Vpo.- Voltaje de oclusión ó voltaje entre compuerta y fuente que cierra completamente el canal. c) n.- Factor de fabricación, que aunque la ecuación que describe el comportamiento es cuadrática
(n=2), esto es un caso ideal, en la realidad n puede ser un valor comprendido entre 1.9 y 2.5 (típicamente).
Algunos métodos para determinar experimentalmente alguno o algunos de los parámetros se presentan a continuación. 1º. Método del fabricante.
Es un método práctico para obtener el voltaje de oclusión, considera que el canal se encuentra “completamente cerrado” cuando al elevar el voltaje compuerta-fuente, la corriente de drenaje cae a tan solo 10 µA, esto es:
AIGSpo DVV µ10==
Para obtener el parámetro experimentalmente, se incrementa lentamente VGS hasta que la corriente de drenaje cae a 10 µA, en ese punto se considera que el voltaje VGS aplicado es el voltaje de oclusión.
2º. Método de Richman.
Sea la ecuación característica ideal del JFET:
I IVVD DSS
GS
po
= −
1
2
manipulando algebraicamente la ecuación y despejando se obtiene:
bxmy
IVVI
I DSSGSpo
DSSD
+=⇓⇓⇓⇓
+
−=
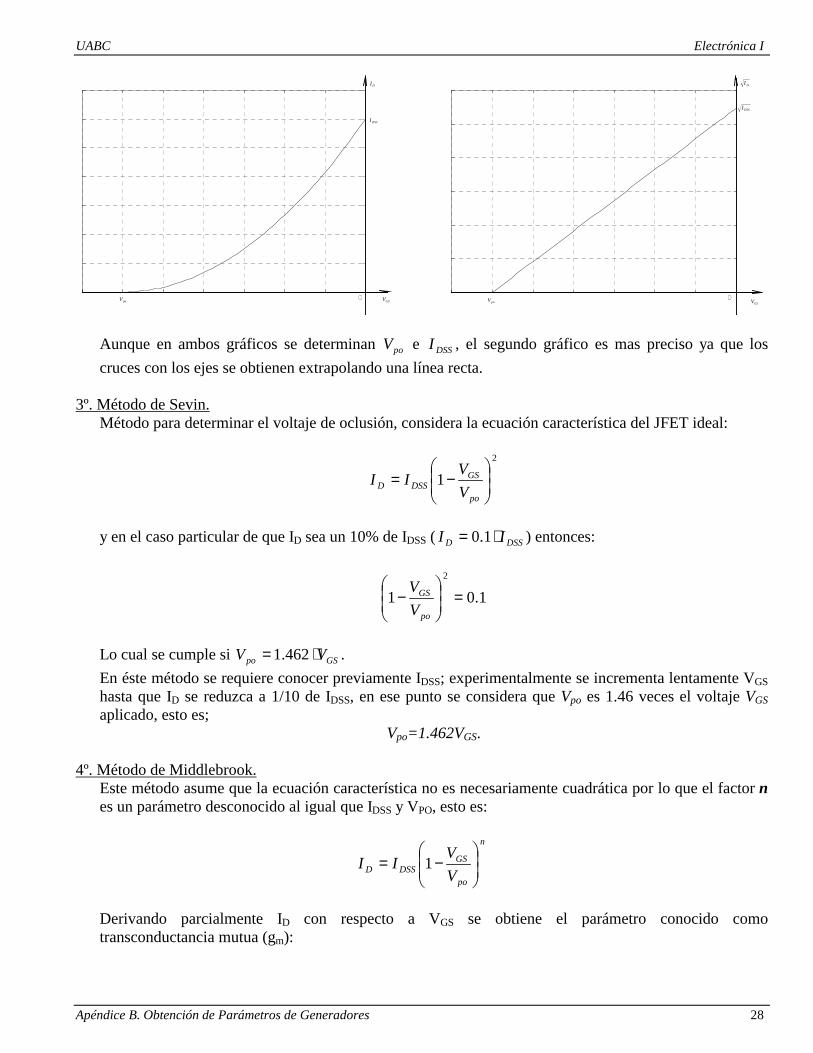
Nótese que la ecuación es la de una línea recta; si graficamos DGS IvsV se obtiene la curva característica
convencional de un JFET pero si graficamos DGS IvsV se obtiene una línea recta en la que la pendiente y los cruces con los ejes determinan los parámetros del JFET, esto se muestra en las siguientes gráficas:
UABC Electrónica I
Apéndice B. Obtención de Parámetros de Generadores 28
DSSI
poV
DI
GSV
poV
GSV
DSSI
DI
Aunque en ambos gráficos se determinan Vpo e I DSS , el segundo gráfico es mas preciso ya que los cruces con los ejes se obtienen extrapolando una línea recta.
3º. Método de Sevin.
Método para determinar el voltaje de oclusión, considera la ecuación característica del JFET ideal:
2
1
−=
po
GSDSSD V
VII
y en el caso particular de que ID sea un 10% de IDSS ( DSSD II ⋅= 1.0 ) entonces:
1.012
=
−
po
GS
VV
Lo cual se cumple si GSpo VV ⋅= 462.1 . En éste método se requiere conocer previamente IDSS; experimentalmente se incrementa lentamente VGS hasta que ID se reduzca a 1/10 de IDSS, en ese punto se considera que Vpo es 1.46 veces el voltaje VGS aplicado, esto es;
Vpo=1.462VGS. 4º. Método de Middlebrook.
Este método asume que la ecuación característica no es necesariamente cuadrática por lo que el factor n es un parámetro desconocido al igual que IDSS y VPO, esto es:
n
po
GSDSSD V
VII
−= 1
Derivando parcialmente ID con respecto a VGS se obtiene el parámetro conocido como transconductancia mutua (gm):

UABC Máquinas Eléctricas
Apéndice B. Obtención de Parámetros de Generadores 29
1
1
1
1
−
−
−
−=
−
−=
∂∂
=
PO
GS
PO
D
n
PO
GS
PO
DSS
GS
Dm
VV
VIn
VV
VIn
VIg
Y manipulando algebraicamente:
bxmy
nVV
ngI PO
GSm
D
1
+=⇓⇓⇓⇓
−
=
Esta es la ecuación de una línea recta, graficando se obtiene lo siguiente:
GSV
po
nV
m
D
gI
poV
n1
Nótese que se hace necesario medir varios parámetros, ID, VGS y gm por lo que de manera práctica, requiere un experimento mas elaborado, uno posible se indica a continuación:

Apéndice C. Medición de Velocidad, Dirección y Posición en el Eje de un Motor Rotatorio 30
Apéndice C MEDICIÓN DE VELOCIDAD, DIRECCIÓN Y POSICIÓN EN EL EJE DE UN MOTOR ROTATORIO Existen varios métodos para medición de las características del giro de un motor rotatorio, algunas se presentan a continuación: 1. Tacogenerador.- En su forma mas simple, es un dínamo cuyo eje se encuentra acoplado (directamente o
a través de engranaje) al eje del motor al que se desea medir la velocidad, al girar este último, arrastra al eje del tacogenerador produciendo entre sus terminales una señal eléctrica cuyo signo y magnitud dependen de la dirección y la velocidad respectivamente. Tal dispositivo debe poseer poca fricción y alta linealidad por lo que su construcción es muy particular, aun así posee umbrales y máximos de velocidad, (por debajo y por arriba de ellos la señal que genera no representa la velocidad de giro), esto le impide medir velocidades de giro muy bajas o muy altas, aunque puede mejorarse con el uso de una transmisión basada en engranes. Otras desventajas del tacogenerador es que provoca una carga extra sobre el motor que reduce el torque útil; con este sistema no es posible determinar la posición angular del eje.
2. Encoder digital.- Es un elemento que consta de una parte fija cercana al eje del motor y una parte móvil acoplada al eje mismo, al girar, la parte móvil conmuta periódicamente un elemento establecido en la parte fija produciendo un pulso, estos pulsos se cuentan durante un intervalo de tiempo específico el cuál se traduce típicamente a revoluciones por minuto (r.p.m.).
La conmutación puede realizarse mediante impacto por elementos mecánicos, variaciones de campo magnético, variaciones de campo eléctrico o variaciones de intensidad luminosa, este último es el utilizado en la mayoría de las aplicaciones; la parte móvil consta de una rueda con zonas opacas y transparentes, la parte fija es un optoacoplador (un emisor de luz, típicamente un LED infrarrojo y un receptor de luz, típicamente un fototransistor, separados una corta distancia); el emisor mantiene una luz constante, al girar la rueda entre emisor y receptor, se producen pulsos de luz que se convierten a pulsos eléctricos en el receptor. Los pulsos pasan a un circuito digital configurado por hardware o software, el cual traduce la cantidad de pulsos durante un tiempo específico a velocidad de giro. Un único optoacoplador y su respectiva rueda produce un tren de pulsos útil únicamente para medir la velocidad de giro, un par de optoacopladores con sus respectivas ruedas y zonas opacas y transparentes diferentemente espaciadas sirve para medir velocidad, dirección y, en caso de paro del motor, posición del eje (cuatro posibles, entre 0 y 90°, entre 90° y 180°, entre 180° y 270° y entre 270° y 360°). Con un grupo de 8 optoacopladores cada uno con su respectiva rueda, podría establecerse la posición angular con la precisión de 360°/256=1.4°. Algunos posibles ruedas para encoder se muestran en la figura Ac1.

UABC Máquinas Eléctricas
Apéndice C. Medición de Velocidad, Dirección y Posición en el Eje de un Motor Rotatorio 31
a) b) c) d) e)
fig. Ac1. Ruedas típicas para encoder digital.
a) decimal (pulsos cada 10°°°°), b)sexagesimal (pulsos cada 30°°°°), c) gray de 4 bits, d) cuadratura y e) 2 bits.
3. Encoder analógico.- Es un elemento que consta de una parte fija cercana al eje del motor y una móvil acoplada al eje del mismo, la parte móvil típicamente es un imán permanente, la parte fija es un circuito integrado con un sensor típicamente de efecto Hall; al girar el imán permanente arrastrado por el eje del motor, el sensor de efecto Hall modifica sus propiedades las cuáles dependen de la velocidad y dirección, el elemento incluye los circuitos necesarios para traducir los efectos en el sensor en velocidad, dirección y posición. El envío es comúnmente mediante una comunicación serial por lo que requiere de un sistema digital configurado por software para facilitar el uso.