unidad aicle: introducciÓn a la robÓtica -...
TRANSCRIPT
PROYECTO 2016-1-ES01-KA201-024990
UNIDAD AICLE: INTRODUCCIÓN A LA ROBÓTICA NIVEL: 4º Curso del Grado en Ingeniería Informática LENGUA: Francés ÁREA: Arquitectura y Tecnología de Computadores TEMPORALIZACIÓN: 2 sesiones NIVEL DE LENGUA SEGÚN EL MCER: A2
PROYECTO 2016-1-ES01-KA201-024990
1
UNIDAD AICLE:
INTRODUCCIÓN A LA ROBÓTICA
NIVEL: 4º Curso del Grado en Ingeniería Informática
LENGUA: Francés ÁREA: Arquitectura y Tecnología de Computadores
TEMPORALIZACIÓN: 2 sesiones NIVEL DE LENGUA SEGÚN EL MCER: A2
1. CONTEXTO
La asignatura optativa Tecnología y Arquitectura Robótica realiza una introducción al mundo de la Robótica, partiendo de que el alumno no
tiene conocimientos previos en esta materia. En la asignatura se explican las diferentes formas en que un robot puede percibir lo que
ocurre a su alrededor y aplicar su “inteligencia” para resolver los problemas. Además, se describen muchas de las aplicaciones actuales
en las que se están utilizando robots, incluyendo, entre otras
aplicaciones en la medicina, industria, en navegación espacial, robótica militar, robótica en el hogar, etc.
Así mismo, se revisan artículos actuales que muestren de forma
práctica aplicaciones donde se utilizan los robots cotidianamente. Finalmente, se proponen debates en clase para fomentar la
participación activa en el desarrollo de las sesiones.
Las prácticas de laboratorio se desarrollan sobre robots LEGO Mindstorms, de tal manera que se pueda aprender a resolver diferentes
situaciones asociadas al manejo de una plataforma robótica en una situación real.
PROYECTO 2016-1-ES01-KA201-024990
2
2. TIPOLOGÍA TEXTUAL DE LAS ACTIVIDADES Y TAREAS
Entrada/ Recepción de textos
Textos explicativos sobre robótica. Textos descriptivos.
Explicaciones del profesor
Imágenes
Salida/ Producción de textos Preguntas y respuestas guiadas para obtener las soluciones correctas.
Texto narrativo: explicaciones, definiciones, resúmenes que deben
producir los alumnos. Esquema final
3. COMPETENCIAS ESPECÍFICAS (verificadas por ANECA en grados y másteres oficiales)
Competencias Específicas (Tecnología Específica):
CEC5: Capacidad para adquirir, obtener, formalizar y representar
el conocimiento humano en una forma computable para la resolución de problemas mediante un sistema informático en
cualquier ámbito de aplicación, particularmente los relacionados con aspectos de computación, percepción y actuación en
ambientes o entornos inteligentes.
CEC6: Capacidad para desarrollar y evaluar sistemas interactivos y de presentación de información compleja y su aplicación a la
resolución de problemas de diseño de interacción persona computadora.
4. OBJETIVOS
Objetivos lingüísticos
- Comprender la idea general y las ideas principales de textos orales, relacionados con los contenidos de la materia, de forma
guiada.
PROYECTO 2016-1-ES01-KA201-024990
3
- Comprender las ideas principales de textos escritos, así como
instrucciones sencillas y con apoyo visual sobre la robótica. - Redactar textos sencillos, utilizando el léxico adecuado y
respetando las reglas elementales de composición de textos y de ortografía y puntuación.
- Usar de forma guiada las TICs para actividades relativas a la robótica: diccionario, vídeo, soluciones de las actividades,
ejercicios, informes, …
Objetivos de área
Introducir al alumno en el mundo de la robótica. Entender y saber utilizar diferentes tecnologías de percepción de
señales y de actuación en entornos robóticos. Describir y ser capaz de utilizar diferentes propuestas de
arquitecturas para el diseño de robots y la planificación de su comportamiento.
Desarrollar las habilidades y aptitudes necesarias para la resolución de problemas y misiones sencillas en plataformas
robóticas reales. Fomentar el espíritu crítico en los estudiantes hacia diferentes
herramientas y aplicaciones de la robótica, valorando su
importancia y su continua evolución.
5. CONTENIDOS
Concepto de robot.
Robots industriales: concepto; grado de libertad; articulaciones; clasificación (por la geometría, por el método de control); estudio
cinemático; estudio dinámico. Comprensión de textos escritos de forma guiada y con apoyo
visual de mensajes que contengan información sobre robots. Interpretación de mensajes que contengan informaciones de
robótica. Adquisición del léxico relativo a la robótica.
PROYECTO 2016-1-ES01-KA201-024990
4
6. CRITERIOS DE EVALUACIÓN
Reconocer la idea general de un texto y elaborar textos sencillos
a partir de un modelo. Utilizar con corrección los conceptos empleados: robot, robot
industrial, grado de libertad, eslabón, articulación, clasificación por la geometría, clasificación por el método de control, control
en robots industriales, mecánica del robot.
Participar en situaciones comunicativas sobre robots. Comunicar por escrito (y oralmente, si es posible) un problema.
Redactar textos sencillos a partir de modelos sobre robots. Conocer y utilizar correctamente el léxico específico del tema en
la L1 y en la L2.
7. INSTRUMENTOS DE EVALUACIÓN
Búsqueda de la información necesaria para elaborar la actividad.
Reproducción de frases y léxico de la unidad. Producción de textos escritos.
Tarea final: realización del esquema de la unidad. Hoja de Auto-evaluación.
ACTUALIZACIÓN DEL PEL (Portfolio Europeo de las Lenguas)
Al término de la secuencia, los alumnos/as:
Pondrán al día su Biografía Lingüística con respecto a los
descriptores referidos a la L2 del nivel en que cada uno se halle en cada destreza (habrá alumnos/as en A1 y otros en los
primeros estadios de A2). Incluirán la tarea final en el Dossier del PEL, una vez evaluado
y corregido.
PROYECTO 2016-1-ES01-KA201-024990
5
ACTIVIDADES DEL ALUMNO:
CAHIER DE TRAVAIL
THECNOLOGIE ET ARCHITECTURE ROBOTIQUE:
PROYECTO 2016-1-ES01-KA201-024990
6
CONCEPTES BASIQUES. EVOLUTION DE LA ROBOTIQUE
1- Lisez le texte ci-dessous. Faites une lecture profonde.
NIVEAUX DE COMPLEXITÉ
Il faudrait déterminer un niveau de complexité a partir duquel un dispositif
automatique peut être considéré comme un robot.
Les trois niveaux de complexité d’un dispositif de manipulation sont:
- Téléopération: C’est la manipulation à distance par un opérateur
humain. Dans ce niveau sont, par exemple, les bras robotiques
developpés à partir de la deuxième guerre mondiale pour la
manipulation de matériel radioactif.
- Téléprésence: Une téléopération à laquelle on rajoute en plus des
capteurs que informent l’opérateur de l’état de la tâche, idéalement,
comme si celui-ci se trouvait dans l’endroit d’execution de celle-là. Les
dispositifs mobiles pour desactiver des explosifs avec des caméras et
des capteurs de contact ou force sont des exemples de ce cas-là.
- Autonomie: Le robot fait son travail en prenant les décisions
adéquates à partir du programme stocké, et des signaux reçus des
capteurs à chaque instant, sans avoir besoin d’intervention de
l’opérateur pendant l’exécution de la tâche.
2- Explique à tes camarades ce que tu viens de lire.
3- QU’EST-CE QU’UN ROBOT?
Je pense qu’un robot est ______________________________
________________________________________________________
________________________________________________________
PROYECTO 2016-1-ES01-KA201-024990
7
DÉFINITION DE ROBOT
- Il existe certaines difficultés pour établir une définition formelle de
ce que c’est un robot.
- L’idéal serait que tout robot soit autonome, même avec la capacité pour
varier son programme et apprendre.
- Les définitions sont très variées:
Machine ou engin électronique programmable, capable de
manipuler des objets et de réaliser des opérations avant
réservées seulement à des personnes (RAE)
- Selon la Robot Industries Assotatio, (RIA), un robot est:
“Un manipulateur reprogrammable multifonctionnel, préparé
pour bouger du matériel, parties, outils ou dispositifs spécialisés
en employant des mouvements programmés variables pour
l’exécution des différentes tâches”.
- Cette définition n’est pas correcte et suffisamment générale, dans le
sens qu’elle ne restreint pas la technologie utilisée pour la construction
du robot, ni la méthode pour le programmer.
- Les caractéristiques importantes qui apparaissent dans cette
définition et qui différencient un robot d’autres dispositifs
manipulateurs, comme des machines- outil ou similaires, sont:
o La multifonctionnalité, c’est à dire, le robot doit être
suffisamment versatil pour exécuter des tâches variées, pas
prévues a priori par son programmeur.
o La programmabilité, c’est à dire, la capacité de changer d’une
tâche à une autre seulement en changeant le programme (la
séquence d’instructions) qu’il doit exécuter.
- Problemes:
Notions de penser, raisonnement, résolution de problèmes,
émotions, conscience …
- Selon Arkin, un robot est:
Une machine capable d’extraire une information de son
entourage et d’utiliser des connaissances sur son monde pour
bouger d’une façon qui obéisse ses propos.
PROYECTO 2016-1-ES01-KA201-024990
8
- Selon Mataric, un robot est:
Un système autonome qui existe dans le monde réel, peut
percevoir son entourage et peut agir sur lui pour réussir certains
objectifs.
4- Écris ta définition de robot après la lecture des paragraphes
antérieurs:
________________________________________________________
________________________________________________________
________________________________________________________
5- Cherche sur internet d’autres définitions de robot
________________________________________________________
________________________________________________________
________________________________________________________
Source: __________________________________________________
6- Commente avec tes camarades à haute voix quels sont les problèmes
que l’on trouve pour donner une définition de robot.
7- Lis le texte suivant, après avoir écouté l’explication de ton
professeur:
ROBOTIQUE INDUSTRIELLE
- Les robots industriels sont nés de la convergence de technologies de
controle automatique et, en particulier du controle des machines-outil,
des manipulateurs téléopérés, et de l’application des ordinateurs en
temps réel.
- Ils sont des engins mécaniques et electroniques destinés à réaliser de
façon automatique déterminé des processus de fabrication ou
manipulation.
- Le controle automatique de processus implique réaliser des machines
qui permettent de gouverner un processus sans l’intervention des
agents extérieurs.
PROYECTO 2016-1-ES01-KA201-024990
9
8- Qu’est-ce qu’un robot industriel?
________________________________________________________
________________________________________________________
________________________________________________________
9- Lis le texte suivant. Écoute ton professeur.
CLASSIFICATIONS DES ROBOTS INDUSTRIELS
- Il existe aujourd’hui une grande quantité de robots, parmi eux certains
très spécifiques, donc il est difficile d’établir une seule classification
valable.
- Malgré cela, il y a plusieurs critères qui facilitent cette tâche.
- Degré de liberté qui représente chacune des coordonnées
indépendantes nécessaires pour décrire l’état d’un système mécanique.
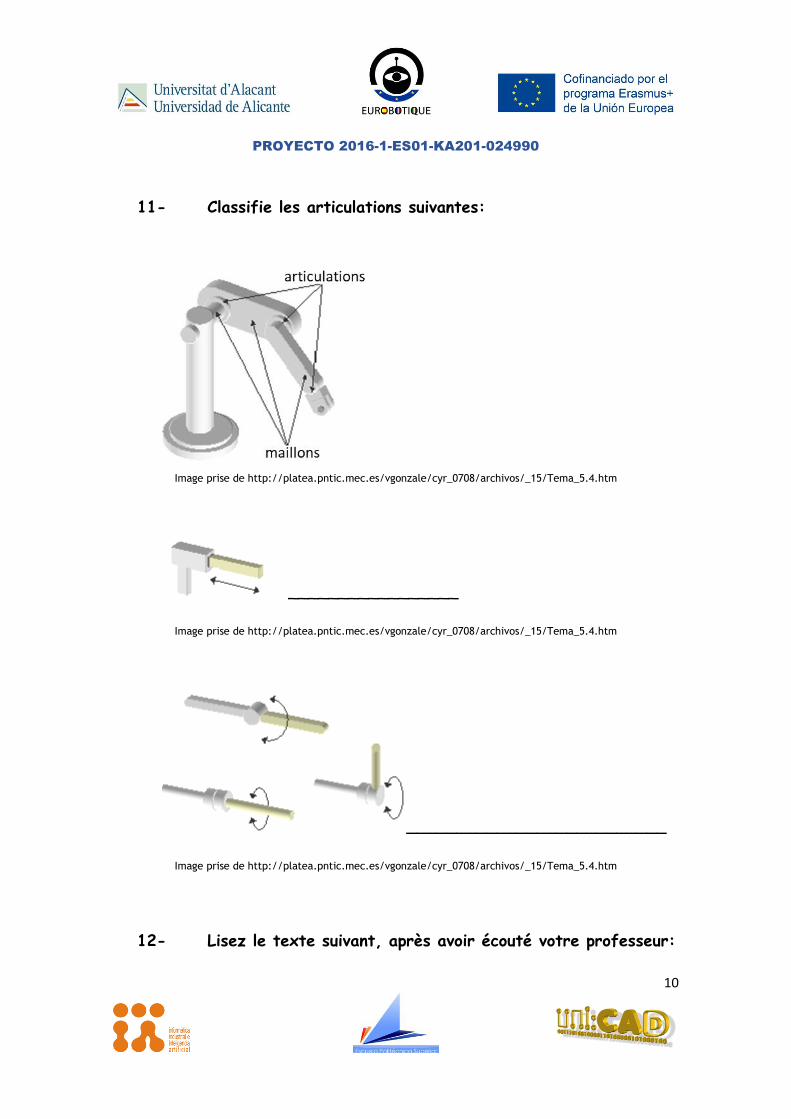
- Un manipulateur robotique est constitué d’une séquence d’élements
structurels rigides, appelés liens ou maillons, conectés entre eux par
des articulations, qui permettent le mouvement relatif tous les deux
maillons consécutifs.
- Une articulation peut être:
o Linéaire
o Rotationnel
10- Complète les informations antérieures avec les explications
de ton professeur et le résultat de tes recherches sur internet:
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
PROYECTO 2016-1-ES01-KA201-024990
10
11- Classifie les articulations suivantes:
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
_________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
__________________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0708/archivos/_15/Tema_5.4.htm
12- Lisez le texte suivant, après avoir écouté votre professeur:
PROYECTO 2016-1-ES01-KA201-024990
11
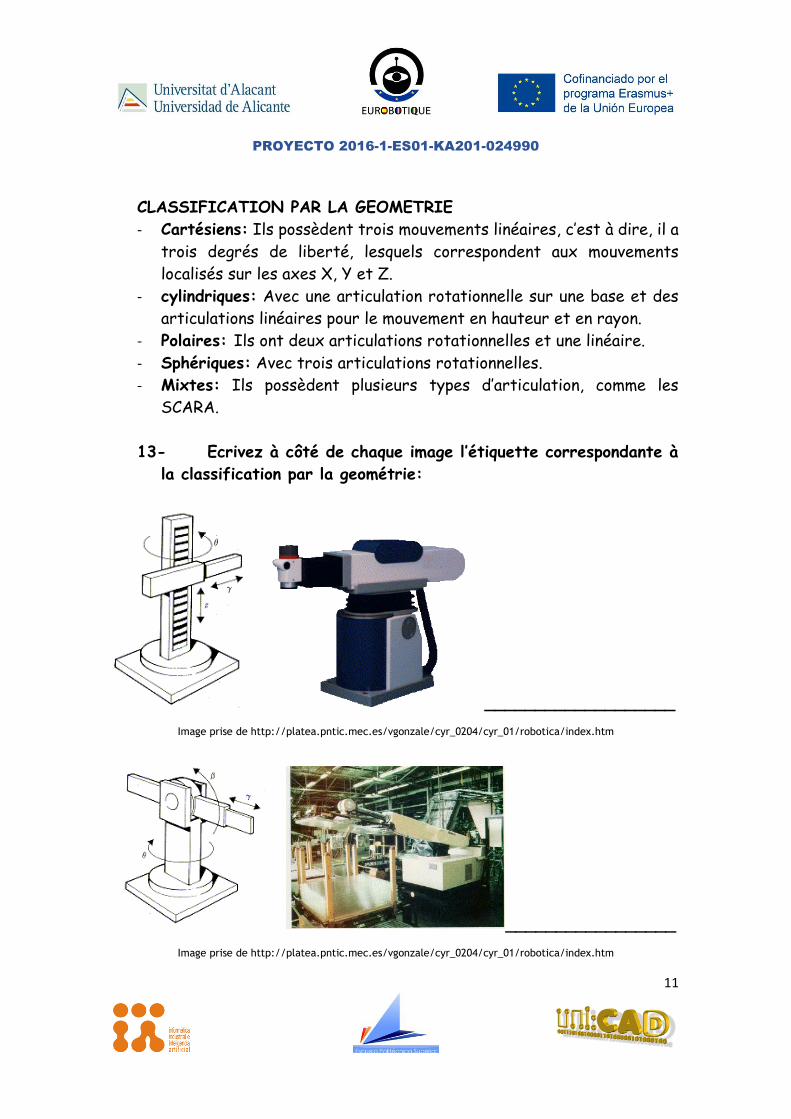
CLASSIFICATION PAR LA GEOMETRIE
- Cartésiens: Ils possèdent trois mouvements linéaires, c’est à dire, il a
trois degrés de liberté, lesquels correspondent aux mouvements
localisés sur les axes X, Y et Z.
- cylindriques: Avec une articulation rotationnelle sur une base et des
articulations linéaires pour le mouvement en hauteur et en rayon.
- Polaires: Ils ont deux articulations rotationnelles et une linéaire.
- Sphériques: Avec trois articulations rotationnelles.
- Mixtes: Ils possèdent plusieurs types d’articulation, comme les
SCARA.
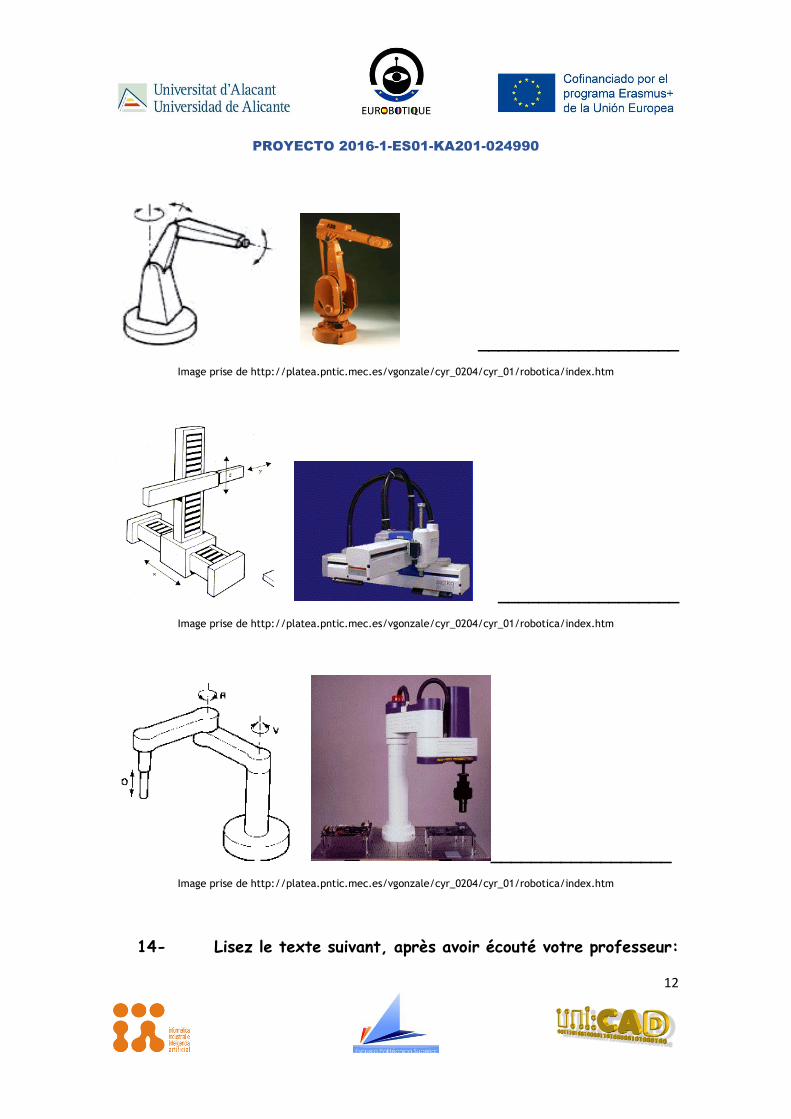
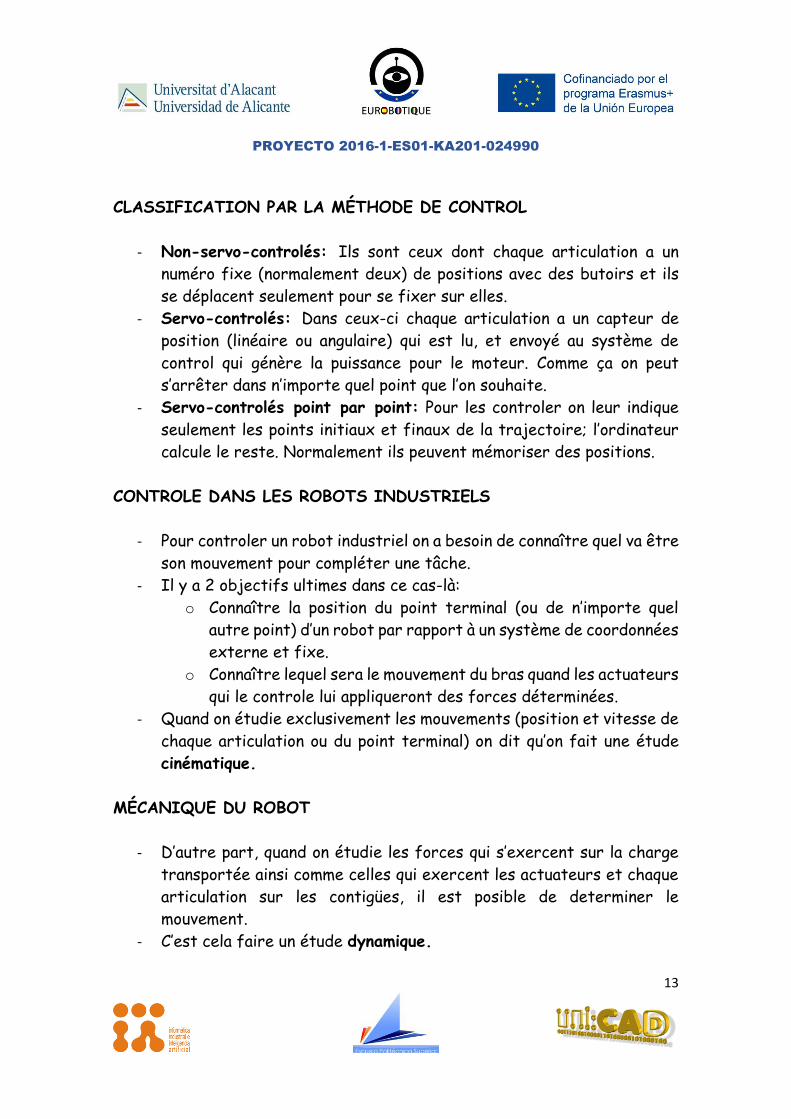
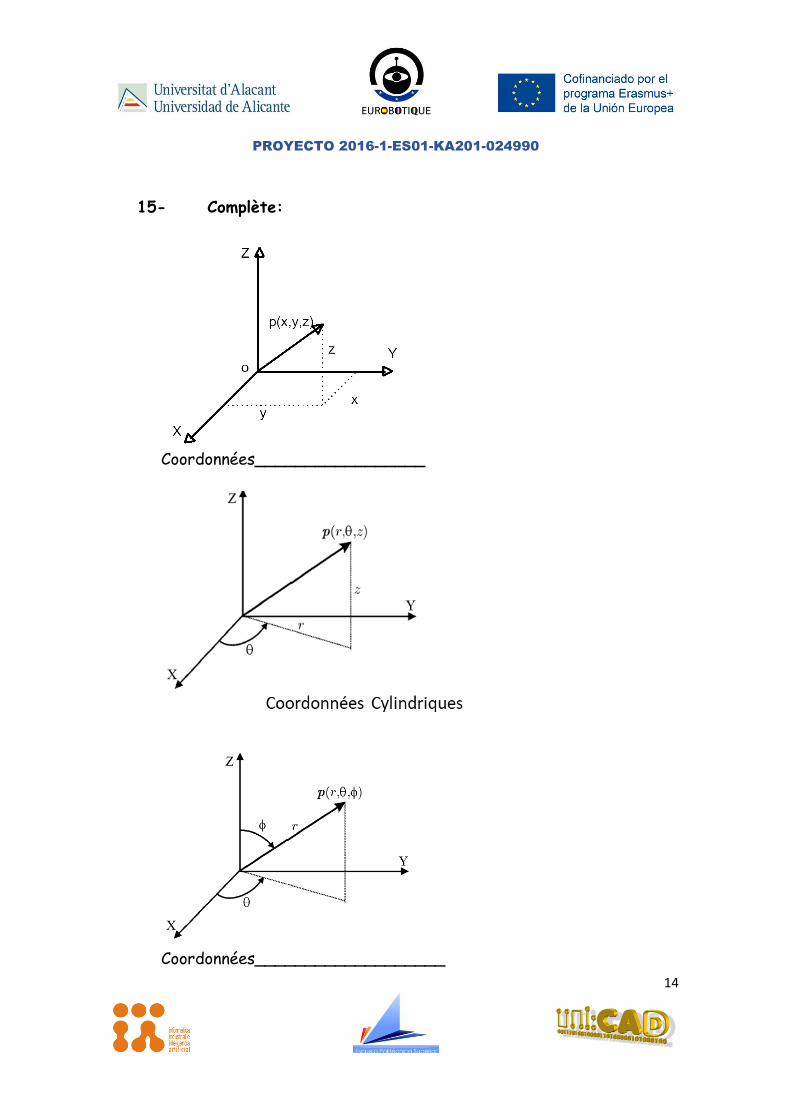
13- Ecrivez à côté de chaque image l’étiquette correspondante à
la classification par la geométrie:
___________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/index.htm
_________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/index.htm
PROYECTO 2016-1-ES01-KA201-024990
12
____________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/index.htm
__________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/index.htm
__________________
Image prise de http://platea.pntic.mec.es/vgonzale/cyr_0204/cyr_01/robotica/index.htm
14- Lisez le texte suivant, après avoir écouté votre professeur:
PROYECTO 2016-1-ES01-KA201-024990
13
CLASSIFICATION PAR LA MÉTHODE DE CONTROL
- Non-servo-controlés: Ils sont ceux dont chaque articulation a un
numéro fixe (normalement deux) de positions avec des butoirs et ils
se déplacent seulement pour se fixer sur elles.
- Servo-controlés: Dans ceux-ci chaque articulation a un capteur de
position (linéaire ou angulaire) qui est lu, et envoyé au système de
control qui génère la puissance pour le moteur. Comme ça on peut
s’arrêter dans n’importe quel point que l’on souhaite.
- Servo-controlés point par point: Pour les controler on leur indique
seulement les points initiaux et finaux de la trajectoire; l’ordinateur
calcule le reste. Normalement ils peuvent mémoriser des positions.
CONTROLE DANS LES ROBOTS INDUSTRIELS
- Pour controler un robot industriel on a besoin de connaître quel va être
son mouvement pour compléter une tâche.
- Il y a 2 objectifs ultimes dans ce cas-là:
o Connaître la position du point terminal (ou de n’importe quel
autre point) d’un robot par rapport à un système de coordonnées
externe et fixe.
o Connaître lequel sera le mouvement du bras quand les actuateurs
qui le controle lui appliqueront des forces déterminées.
- Quand on étudie exclusivement les mouvements (position et vitesse de
chaque articulation ou du point terminal) on dit qu’on fait une étude
cinématique.
MÉCANIQUE DU ROBOT
- D’autre part, quand on étudie les forces qui s’exercent sur la charge
transportée ainsi comme celles qui exercent les actuateurs et chaque
articulation sur les contigües, il est posible de determiner le
mouvement.
- C’est cela faire un étude dynamique.
PROYECTO 2016-1-ES01-KA201-024990
14
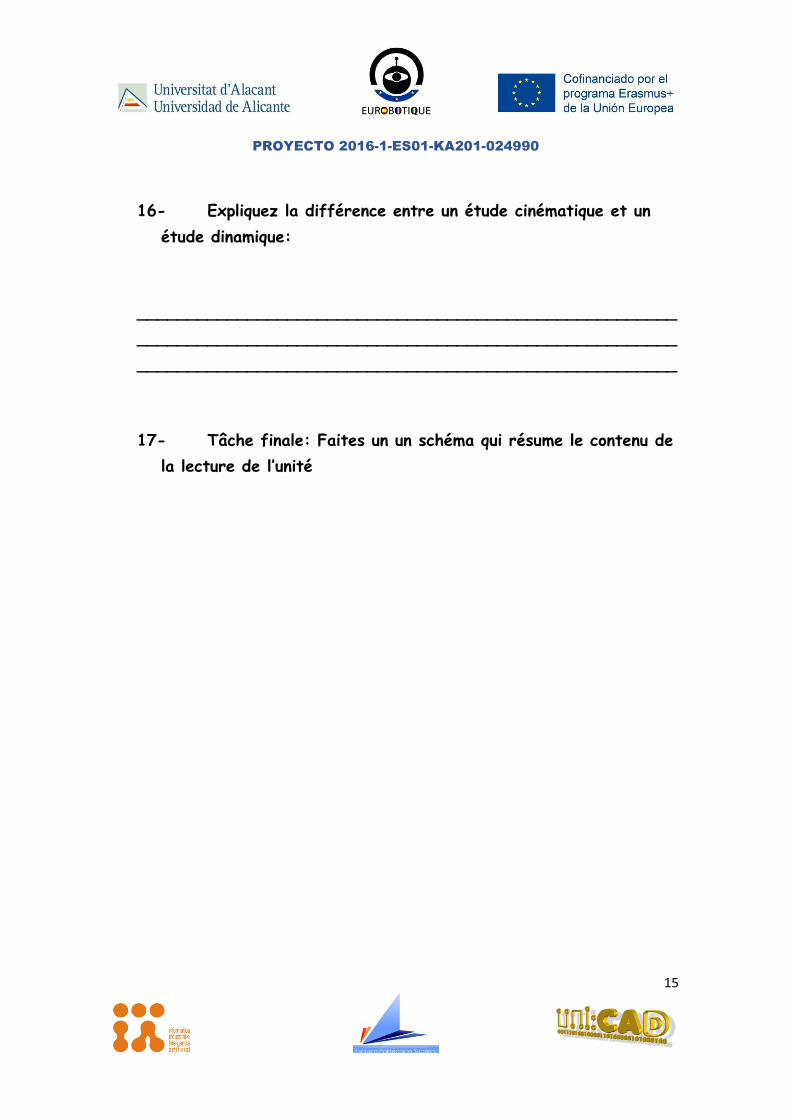
15- Complète:
Coordonnées_________________
Coordonnées___________________
PROYECTO 2016-1-ES01-KA201-024990
15
16- Expliquez la différence entre un étude cinématique et un
étude dinamique:
______________________________________________________
______________________________________________________
______________________________________________________
17- Tâche finale: Faites un un schéma qui résume le contenu de
la lecture de l’unité
PROYECTO 2016-1-ES01-KA201-024990
16
18- ACTIVITÉ: Vocabulaire.
Notez ci-dessous tous les mots nouveaux que vous avez appris tout au
long de l’unité. Écrivez la signification en français, cherchez dans un
dictionnaire pour être sûrs de la correction de vos définitions.
________________________________________________________
________________________________________________________
________________________________________________________
________________________________________________________
________________________________________________________
________________________________________________________
________________________________________________________
PROYECTO 2016-1-ES01-KA201-024990
17
AUTO-EVALUATION
TOUJOURS PARFOIS JAMAIS
Comprendre un texte sur la
robotique
Ecrire un texte simple sur la
robotique
JE PEUX Prendre des notes quand
j’entends parler sur la
robotique
Me rappeler du sens des
termes employés dans l’unité
Expliquer par écrit les sens
d’un texte en français
Expliquer oralement le sens
d’un texte au reste de la
classe en français