tÍtulo del proyecto los robots en ambientes …de... · resumen este proyecto se realizó en la...
TRANSCRIPT

TÍTULO DEL PROYECTO
LOS ROBOTS EN AMBIENTES EDUCATIVOS
NOMBRE DE LOS INTEGRANTES
Investigador principal: HORACIO DORIA BELLO
hotmail.com
Coinvestigadores: YULY ZAPPA BERASTEGUI
INTITUCIÓN EDUCATIVA: SAN JOSE DE CARRIZAL
MUNICIPIO: SAN CARLOS
CORPORACION NACIONAL DE EDUCACION SUPERIOR - CUN
VICERRECTORIA DE PROYECTOS ESPECIALES
PROYECTO “FORTALECIMIENTO DE LA CULTURA CIUDADANA Y
DEMOCRÁTICA EN CIENCIA, TECNOLOGÍA E INNOVACIÓN, A TRAVÉS DE
LA INVESTIGACIÓN COMO ESTRATEGIA PEDAGÓGICA APOYADA EN LAS
TIC EN EL DEPARTAMENTO CÓRDOBA”
CONVENIO ESPECIAL DE COOPERACIÓN No. 751 DE 2013
MONTERÍA-CÓRDOBA
2017

RESUMEN
Este proyecto se realizó en la Institución Educativa San José de Carrizal, del
municipio de San Carlos, entre los meses de Abril a octubre de 2017, con el
objetivo de “Establecer la contribución de la robótica como estrategia pedagógica
en la promoción del aprendizaje significativo y el desarrollo de competencias de
los estudiantes de los grados 8, 9 y 10 de la I.E San José de Carrizal en las
aéreas de matemática, física y tecnología e informática. Se trabajó con una
muestra de 100 estudiantes seleccionados mediante una convocatoria pública, es
decir, participaron por voluntad propia. Es un estudio de corte cualitativo, con
método de investigación-acción, desarrollado en tres etapas: diagnóstica, diseño-
aplicación y valoración. Los resultados dan cuenta de la importancia del trabajo
por proyectos, de carácter colaborativo. Que integra la teoría y la práctica de
manera situada y concreta, en este caso en la elaboración de prototipos de robots
con diferentes características y funciones, aplicando conocimientos de
matemáticas, física y tecnología e informática, además de conocimientos de sus
propias experiencias de vida.

Contenido
INTRODUCCIÓN ............................................................................................................... 5
1. PROBLEMA .............................................................................................................. 11
1.1. DESCRIPCIÓN DEL PROBLEMA. ........................................................................ 11
1.2. FORMULACIÓN DEL PROBLEMA. ................................................................... 14
2. OBJETIVOS. .............................................................................................................. 14
2.1. Objetivo General. ................................................................................................. 14
2.2. Objetivos Específicos...................................................................................... 14
3. JUSTIFICACIÓN ...................................................................................................... 15
4. MARCO DE REFERENCIA....................................................................................... 16
4.1. ANTECEDENTES. ................................................................................................ 16
4.2. MARCO TERÓRICO ............................................................................................ 21
Definición de Robótica............................................................................................... 23
5. METODOLOGÍA. ...................................................................................................... 31
5.1. Tipo de Investigación. ..................................................................................... 31
5.2 Diseño de Investigación. ........................................................................................ 32
5.3. POBLACION Y MUESTRA .................................................................................... 34
6. RESULTADOS Y DISCUSIÓN. ................................................................................ 34
6.1. Fase Diagnóstica. ............................................................................................ 34
6.2. Fase de diseño y aplicación............................................................................ 38
6.2.1. Resultados de la primera guía. ................................................................ 39
6.2.2. Resultados de la segunda guía. .............................................................. 42
6.3. Fase de Valoración: ......................................................................................... 46
7. CONCLUSIONES Y RECOMENDACIONES. ........................................................... 48
8. REFERENCIAS BIBLIOGRÁFICAS. ........................................................................ 50

4
ANEXOS
9. ANEXOS .................................................................................................................. 52
9.1. Guía de Electrónica Básica ............................................................................. 52
9.2. GUÍA DE PROGRAMACIÓN CON ARDUINO .................................................. 86
10. DIARIO DE CAMPO ............................................................................................. 97
5
INTRODUCCIÓN
La robótica es el bum de la tecnología moderna incluida en el campo educativo,
que se puede definir como la ciencia y la tecnología de los robots. Se ocupa del
diseño, manufactura y aplicaciones de los robots. La robótica combina diversas
disciplinas como son: la mecánica, la física, la electrónica, la informática, la
inteligencia artificial y la ingeniería de control, teniendo como base fundamental la
corriente eléctrica, los sistemas mecánicos, los sistemas electrónicos como
sensores ópticos, de ultrasonido, infrarrojos, magnéticos, de proximidad,
resistencias, motores, circuitos eléctricos como generadores, conductores, de
control y de protección que se utilizan para crear movimientos a los robots, bajo
estas perspectivas nuestro proyecto guarda relación con el proceso de
enseñanza-aprendizaje de estos mecanismos puesto que se utiliza la
programación de microchip de memorias para que ejecuten las ordenes de
movimientos programadas a cada robots, juegos de luces, alarmas construidas. El
desarrollo de este proyecto está basado en la placa electrónica Arduino con su
respectivo lenguaje de programación donde los estudiantes aprenden a darle
órdenes a cada robot para que estos la ejecuten una vez terminados.
En la I.E San José de Carrizal no se venía trabajando un proyecto de investigación
con estas características, que incluyera los aprendizajes significativos en las
diferentes áreas del saber. Por ello, desde el año 2015 se comenzó a trabajar este
proyecto para mejorar el quehacer pedagógico en el proceso de enseñanza-
aprendizaje con alumnos de los grados 8, 9 y 10 de bachillerato en la Institución
Educativa San José de Carrizal, involucrando las áreas de Matemática, Física y
Tecnología e Informática, tomando como referente otros trabajos como
antecedentes para esta investigación.
Respecto del problema concreto del cual parte este estudio se precisa que el
rendimiento académico de los estudiantes en las áreas de matemática, física y
6
tecnología e informática era muy deficiente, entre otras, por las siguientes
situaciones:
1. En charlas con las maestras de matemática se comentaba que los alumnos
presentaban bajo rendimiento académico, de manera reiterada, debido a que los
estudiantes presentaban dificultades en las competencias de comunicación,
razonamiento y resolución de problemas; se les dificulta el despeje de variables en
las ecuaciones, realizar cálculos mentales, el uso de instrumentos para realizar
mediciones, realizar construcciones con el uso de reglas y compás: por otra parte,
no cuentan con textos talleres para el desarrollo de la asignatura.
2. En una reunión con la profesora del área de física de la institución educativa
San José de carrizal, comentaba que los estudiantes mostraban poco interés en
las clases teóricas por la falta de comprensión, debido a que no detallaban los
objetos para su interpretación por la distracción en clase
3. En el área de tecnología e informática se presentan varias dificultades, ya que
la informática es una parte de la tecnología que aborda el manejo y proceso de la
información a través de sus diferentes aplicaciones de software, las cuales
manejan comandos de ejecución exactos: Por ello, una de las dificultades más
pronunciadas de los alumnos es la parte teórica, debido a que muestran poco
interés por comprender e interpretar los conceptos que el maestro imparte sobre
las temáticas desarrolladas en clase: De la misma manera, los alumnos pretenden
realizar prácticas en los computadores sin leer el material teórico, dificultando la
ejecución de las actividades programadas en los computadores. Además, no leen
los mensajes que las aplicaciones presentan en sus menús y mucho menos las
ayudas que pueden ser de mucha utilidad al momento de realizar las prácticas de
actividades como creaciones de texto en Microsoft Word, creaciones de
presentaciones en PowerPoint y manejo de hoja de cálculo en Excel en los
computadores.
4. La otra variable del problema está referida a la falta de propuestas
metodológicas por parte de los docentes, que ayuden a mejorar el trabajo escolar

7
de los estudiantes en las áreas mencionadas. Propuestas que ofrezcan otras
formas de trabajo más dinámicas y contextualizadas con los intereses de los
estudiantes y acorde con las condiciones actuales de la escuela en cuanto a
disposición de recursos, pues se considera que si hay tantas dificultades como las
señaladas en los puntos anteriores, y a eso se le agrega que las metodologías que
usan los maestros son de corte tradicional y poco creativas e innovadoras,
lógicamente, menos se podrá avanzar hacia mejores niveles de calidad en la
educación de los estudiantes.
Atendiendo a todas estas situaciones problémicas se formuló la siguiente pregunta
de investigación: ¿Cuál es la contribución de la robótica cómo estrategia
pedagógica en el desarrollo de competencias de los estudiantes de grado 8, 9, y
10 en las áreas de matemática, física y tecnología e informática, en la institución
educativa San José de carrizal?
A partir de ahí, bajo el aval institucional y la participación de los profesores de las
áreas mencionadas arriba, más la decisión voluntaria de un grueso número de
estudiantes de participar en un proyecto conjunto, se formularon los siguientes
objetivos de trabajo: Objetivo General: Establecer la contribución de la robótica
como estrategia pedagógica en la promoción del aprendizaje significativo y el
desarrollo de competencias de los estudiantes de los grados 8, 9 y 10 de la I.E
San José de Carrizal en las aéreas de matemática, física y tecnología e
informática. Específicos: 1. Diagnosticar los niveles de competencias de los
estudiantes de los grados 8, 9 y 10 en las áreas de matemática, física y tecnología
e informática, 2. Diseñar y aplicar estrategias pedagógicas mediadas por la
robótica para desarrollar las competencias que permitan el aprendizaje
significativo de los estudiantes, en las matemática, física y tecnología e
informática, y 3. Valorar los avances en los niveles de competencias de los
estudiantes en las aéreas de matemática, física, tecnología e informática, después
de aplicar las estrategias pedagógicas mediadas por la robótica.

8
Este es un estudio de tipo cualitativo con un método de acción-participación que
involucra a docentes y estudiantes en la comprensión de los fundamentos de la
electrónica (robótica) y su aplicación en el trabajo académico de aula para
fortalecer el desarrollo de competencias en las áreas de matemática, física y
tecnología e informática. La investigación-acción es un método de trabajo que
favorece la acción colectiva y participativa de los actores que en ella intervienen.
Jhon Elliott y Stephen Kemmis (2000) establece que: “la investigación-acción se
relaciona con los problemas prácticos cotidianos experimentados por los
profesores en vez de con los problemas teóricos definidos por los investigadores
puros en el entorno de una disciplina del saber, de igual manera sostiene que el
propósito de la investigación acción consiste en profundizar la comprensión del
profesor acerca de sus propios problemas de enseñanza.
El trabajo, participativo se realizó a partir de la organización de semilleros de
investigación con estudiantes de los grados 8, 9 y 10 de bachillerato de la
Institución Educativa San José de Carrizal.
Este estudio se realizó en tres fases, en concordancia con los tres objetivos
específicos, así:
• Fase diagnóstica: tuvo como propósito identificar los niveles de
competencias que tenían los estudiantes de los grados 8, 9 y 10 en las áreas de
matemática, física y tecnología e informática.
En esta fase se utilizó como técnica la revisión de los informes académicos
bimestrales de 2015 y 2016 emitidos por los maestros de las áreas de matemática,
física y tecnología e informática y por los resultados de las pruebas saber en los
procesos sintéticos de calidad educativa.
• Fase de diseño y aplicación: consistió en la elaboración de las estrategias
pedagógicas mediadas por la robótica para desarrollar las competencias que
permitan el aprendizaje significativo de los estudiantes, en las matemática, física
y tecnología e informática.

9
En esta fase se usaron técnicas como: guías de electrónica básica, con el
propósito de que los alumnos se apropiaran de conceptos básicos sobre el
manejo, uso y aplicabilidad de conocimientos en el diseño y armado de circuitos
electrónicos en la construcción de juegos de luces, alarmas y robots, utilizando
placas electrónicas de Arduino y de ensamble.
Guías de programación con Arduino: con la finalidad de programar los chips de
memorias, los sensores de ultrasonidos y sensores infrarrojos con la ejecución de
comandos de órdenes transmitidas por un computador a la placa de Arduino para
realizar movimientos en diferentes direcciones que los robots las reciban y las
ejecuten.
Diario de campo: Se utilizó con el fin de sistematizar detalladamente las
experiencias que los alumnos iban obteniendo a medida que se avanzaba en el
proceso teórico-práctico de la investigación y obtención de productos.
• Fase de Valoración: en esta fase se analizaron los avances y limitaciones
del estudio en relación con los niveles de competencias de los estudiantes en las
áreas de matemática, física, tecnología e informática, después de aplicar las
estrategias pedagógicas mediadas por la robótica, se establecieron los siguientes
instrumentos de valoración, se usaron las siguientes técnicas:
Diario de campo: aquí se retomaron las limitaciones y los avances anotados en
cada sesión que tuvieron los estudiantes durante el proceso de capacitación
teórico-práctico de diseño, armado y programado con el software de la plataforma
Arduino de los juegos de luces, alarmas y robots.
Mesa Redonda: a partir de unas preguntas guías elaboradas por el maestro,
previamente, se abrió el debate para discutir las limitaciones y avances en el
desarrollo de las actividades que fueron programadas en las sesiones de clase y
determinar que estrategias se podían implementar para superar las dificultades y
mejorar las competencias de los alumnos en las áreas de matemática, física y

10
tecnología e informática en el avance del proyecto. De igual forma se destacaron
los aprendizajes y avances académicos favorecidos por el desarrollo del proyecto.
Para el ejercicio investigativo se tomó una muestra de 100 estudiantes de los
grados 8, 9 y 10. Esta muestra se seleccionó por voluntad propia de los
estudiantes que una vez socializado el proyecto decidieron participar en él.
Los resultados de esta experiencia muestran avances importantes en la
construcción y aplicación de robots de diferentes especificaciones y funciones por
parte de los estudiantes, aplicando para ello conocimientos de las diferentes
áreas, especialmente matemáticas, física y tecnología e informática. Se destaca
en este aspecto la conjugación que se hace entre la teoría y la práctica, cosa poco
común en la pedagogía tradicional que se viene utilizando en la institución.
Este trabajo deja como enseñanza principal que el trabajo pedagógico de aula
tiene que alejarse de la perspectiva tradicional de enseñar contenidos
fragmentados en las distintas áreas del saber. Esto quiere decir que es necesario
integrar contenidos de diferentes asignaturas, alrededor de proyectos de aula en
los que los estudiantes le encuentres sentido a las teorías mediante su aplicación
en la práctica.
De ahí se desprende una recomendación para docentes y directivos: hacer un
esfuerzo por transformar las metodologías tradicionales de enseñanza en las
diferentes áreas, impulsando el trabajo por proyectos, propiciando así el trabajo
conjunto y colaborativo, dándole sentido a los contenidos a través de su aplicación
práctica. De esta manera se recomienda incluir esta posibilidad de trabajo en el
currículo de la Institución, para que se generalice una nueva dinámica de trabajo
en el aula, acorde con las nuevas formas de acceso al conocimiento, haciendo
uso efectivo de la tecnologías de información, con el propósito de lograr mejores
desarrollos en la calidad educativa de los estudiantes.
11
1. PROBLEMA
1.1. DESCRIPCIÓN DEL PROBLEMA.
En la I.E San José de Carrizal no se venía trabajando un proyecto de investigación
con estas características, que incluyera los aprendizajes significativos en las
diferentes áreas del saber. Por ello, desde el año 2015 se comenzó a trabajar este
proyecto para mejorar el quehacer pedagógico en el proceso de enseñanza-
aprendizaje con alumnos de los grados 8, 9 y 10 de bachillerato en la Institución
Educativa San José de Carrizal, involucrando las áreas de Matemática, Física y
Tecnología e Informática, tomando como referente otros trabajos como
antecedentes para esta investigación.
La sede principal de la Institución Educativa San José de Carrizal está ubicada en el
Corregimiento de Carrizal, Municipio de San Carlos, lugar en el, que se han identificado
problemas de aprendizaje, y también de tipo económico que han ocasionado el bajo
rendimiento educativo de los estudiantes. Además, cabe señalar que los estudiantes que
asisten a la sede principal de la Institución provienen de diferentes caseríos aledaños del
corregimiento de Carrizal, donde se vivencian muchas necesidades económicas, sociales
y culturales. Los padres o acudientes presentan un bajo nivel educativo (generalmente
tienen solo estudios primarios), y muy pocos con educación básica secundaria o nivel
profesionales. Cabe aclarar que un alto porcentaje de alumnos vive con padres separados
o con abuelos, padrastros o su hogar está conformado por tíos y abuelos. La difícil
economía familiar y el creciente desempleo ocasionan que los adolescentes se dediquen
a labores del campo a temprana edad para poder ayudar a la familia.
La sede principal de la Institución está diseñada para atender 28 grupos, desde el grado
preescolar y transición hasta undécimo de educación media académica, aunque en la
actualidad cuenta con 28 grupos, albergando un total de 749 estudiantes. No cuenta con
orientación escolar y tiene 32 docentes con título universitario, nombrados por la
Secretaria de Educación Departamental de Córdoba, la mayoría con especialización y
maestría, y 3 funcionarios administrativos, el Rector, el Coordinador y una Secretaria.

12
Respecto del problema concreto del rendimiento académico de los estudiantes en las
áreas de matemática, física y tecnología e informática se precisa, entre otras las
siguientes situaciones:
1. En charlas con las maestras de matemática se comentaba que los alumnos
presentaban bajo rendimiento académico, de manera reiterada, debido a que los
estudiantes presentaban dificultades en las competencias de comunicación,
razonamiento y resolución de problemas; se les dificulta el despeje de variables en las
ecuaciones, realizar cálculos mentales, el uso de instrumentos para realizar
mediciones, realizar construcciones con el uso de reglas y compás: por otra parte, no
cuentan con textos talleres para el desarrollo de la asignatura. Debido a las
deficiencias insuperadas, los educandos pasan a cursos superiores con lagunas en
sus conocimientos, y ello influye en sus aprendizajes posteriores: se ha perdido la
cultura del esfuerzo. Se observa también, falta de responsabilidad frente a sus
deberes escolares, y presentan problemas de atención, motivación e interés. En
cuanto al lenguaje, tienen graves fallas en comprensión lectora, falta disciplina,
agilidad mental, trabajo en casa, entre otros, actitud de fobia hacia las matemáticas,
de un cierto porcentaje de estudiantes, muchos estudiantes con graves problemas
emocionales, problemática extra académica cuya solución escapa de las manos de
los docentes, los niños viven en hogares constituidos de tal forma que en muchos
casos no existen las figuras materna y/o paterna y poco acompañamiento de los
padres, acudiente en el proceso de formación de los estudiantes.
2. En una reunión con la profesora del área de física de la institución educativa
San José de carrizal, comentaba que los estudiantes mostraban poco interés
en las clases teóricas por la falta de comprensión, debido a que no detallaban
los objetos para su interpretación por la distracción en clase. Estas dificultades
se presentaron más que todo por la falta de laboratorio y elementos mínimos
para el desarrollo del área, limitándose únicamente con las enseñanzas que
imparte el maestro. Por ejemplo, en los procesos físicos de refracción de la
luz, transmisión de ondas, caída libre de un cuerpo en cuanto a velocidad y
reposo del mismo y por el poco acompañamiento de los padres o acudientes
en la educación de sus hijos.

13
3. En el área de tecnología e informática se presentan varias dificultades, ya que la
informática es una parte de la tecnología que aborda el manejo y proceso de la
información a través de sus diferentes aplicaciones de software, las cuales manejan
comandos de ejecución exactos: Por ello, una de las dificultades más pronunciadas de
los alumnos es la parte teórica, debido a que muestran poco interés por comprender e
interpretar los conceptos que el maestro imparte sobre las temáticas desarrolladas en
clase: De la misma manera, los alumnos pretenden realizar prácticas en los
computadores sin leer el material teórico, dificultando la ejecución de las actividades
programadas en los computadores. Además, no leen los mensajes que las
aplicaciones presentan en sus menús y mucho menos las ayudas que pueden ser de
mucha utilidad al momento de realizar las prácticas de actividades como creaciones
de texto en Microsoft Word, creaciones de presentaciones en PowerPoint y manejo de
hoja de cálculo en Excel en los computadores. Otra dificulta es que la institución no
cuenta con material bibliográfico y con acceso a Internet para que los estudiantes
investiguen, y tienen poca ayuda de los padres de familia, desde el hogar, en la
formación educativa de sus hijos.
4. La otra variable del problema está referida a la falta de propuestas metodológicas por
parte de los docentes, que ayuden a mejorar el trabajo escolar de los estudiantes en
las áreas mencionadas. Propuestas que ofrezcan otras formas de trabajo más
dinámicas y contextualizadas con los intereses de los estudiantes y acorde con las
condiciones actuales de la escuela en cuanto a disposición de recursos, pues se
considera que si hay tantas dificultades como las señaladas en los puntos anteriores,
y a eso se le agrega que las metodologías que usan los maestros son de corte
tradicional y poco creativas e innovadoras, lógicamente, menos se podrá avanzar
hacia mejores niveles de calidad en la educación de los estudiantes. De ahí la
necesidad de formular propuestas de investigación pedagógica que se consoliden
dentro del Proyecto Educativo Institucional y el Currículo de las diferentes áreas, de
carácter colectivo, involucrando a estudiantes, padres de familia, docentes y directivos
docentes, que contribuyan a mejorar las condiciones de trabajo y el rendimiento
académico de los estudiantes en las distintas áreas del saber.
14
1.2. FORMULACIÓN DEL PROBLEMA.
¿Cuál es la contribución de la robótica cómo estrategia pedagógica en el
desarrollo de competencias de los estudiantes de grado 8, 9, y 10 en las áreas
de matemática, física y tecnología e informática, en la institución educativa San
José de carrizal?
2. OBJETIVOS.
2.1. Objetivo General.
Establecer la contribución de la robótica como estrategia pedagógica en la
promoción del aprendizaje significativo y el desarrollo de competencias de los
estudiantes de los grados 8, 9 y 10 de la I.E San José de Carrizal en las aéreas de
matemática, física y tecnología e informática.
2.2. Objetivos Específicos.
Diagnosticar los niveles de competencias de los estudiantes de los grados 8, 9
y 10 en las áreas de matemática, física y tecnología e informática.
Diseñar y aplicar estrategias pedagógicas mediadas por la robótica para
desarrollar las competencias que permitan el aprendizaje significativo de los
estudiantes, en las matemática, física y tecnología e informática.
Valorar los avances en los niveles de competencias de los estudiantes en las
aéreas de matemática, física, tecnología e informática, después de aplicar las
estrategias pedagógicas mediadas por la robótica.
15
3. JUSTIFICACIÓN
En la actualidad el “boom” alrededor de la economía creativa, el emprendimiento y
los desarrollos tecnológicos, impone retos a la manera en la que vemos la
educación. Por ello, en este proyecto se hace énfasis en el manejo de las
herramientas electrónicas y mecánicas para la compresión de las áreas de
matemática, física y tecnología e informática, que permitan aclarar y profundizar
los conocimientos adquiridos; teniendo en cuenta habilidades y destrezas;
despertando curiosidad, interés y la capacidad para diseñar modelos robóticos, y
de esta manera generar una constante motivación hacia el aprendizaje del
desarrollo tecnológico en los estudiantes de los grados octavo, noveno y décimo.
Del mismo modo, esta investigación es importante porque permitió crear el
semillero de robótica con los estudiantes, con el propósito de complementar el
proceso de aprendizaje que promueva la adaptación, comprensión y uso
significativo de la tecnología, integrando como metodología el aprendizaje
colaborativo, el cual brinda a los estudiantes la experiencia de construir
conocimiento en equipo, la oportunidad de aplicarlo en su cotidianidad, de
involucrar otros miembros de la familia o de la comunidad y orientar el trabajo
hacia la realización de ejercicios prácticos que puedan ser utilizados para la
resolución de necesidades específicas de su entorno. De esta manera, la razón de
ser del proyecto es sembrar la semilla del conocimiento y despertar vocación
científica que permita a los alumnos generar mejores oportunidades de vida,
mayor desarrollo social e incremento de las posibilidades de inserción de los
miembros de la comunidad dentro de las nuevas dinámicas que impone el mundo
moderno enmarcadas en la tecnología.
El presente proyecto aportará a la formación de una generación de niños y
jóvenes sensibilizados con el desarrollo actual de la ciencia y la tecnología,
conscientes del potencial creativo y de aprendizaje que poseen, propiciando

16
ambientes de aprendizaje óptimos para la creación, la innovación de ideas y
valores que puedan ser transferido a la cotidianidad.
4. MARCO DE REFERENCIA.
4.1. ANTECEDENTES.
Para esta investigación, se realizó un rastreo bibliográfico de investigaciones
realizadas por otros investigadores en los últimos cinco (5) años en el ámbito
nacional e internacional, relacionados con el uso de la robótica educativa. A
continuación se reseñan tres (3) investigaciones a nivel de Colombia y una (1) a
nivel internacional.
En primer lugar se registra el trabajo del investigador Brian Moreno Betancur y
Esteban Velásquez Toro (2013), titulado “Prototipo de mano mecatrónica para
aplicaciones en robótica industrial”. Este trabajo tuvo como objetivo, Diseñar y
construir un prototipo de mano mecatrónica, controlada por un guante
instrumentado, a fin de probar su capacidad de maniobrabilidad y agarre en
volúmenes geométricos, realizado en la ESCUELA DE INGENIERÍA DE
ANTIOQUIA DE ENVIGADO, Colombia. El estudio se abordó a través de una
metodología que incluye tres (3) etapas, con el desarrollo de actividades incluidas.
Dentro de los resultados de esta investigación se destacan. La mano mecatrónica
construida tiene la capacidad de manipular volúmenes geométricos y soportar una
carga considerable, toda vez que con base al diseño de detalle elaborado, se
construyeron las piezas idóneas para la correcta funcionalidad del prototipo; en el
cual se integran los elementos físicos que permiten dotar al sistema con la
maniobrabilidad y el agarre propio de una mano humana, y así lograr emular sus
movimientos básicos.
El guante instrumentado que se implementó en el sistema, permitió que el mismo
pudiera trabajar de manera sencilla, toda vez que al ejecutar algunos movimientos
básicos con el guante, el elemento terminal tipo mano mecatrónica interpretaba

17
dichos movimientos de manera apropiada, de acuerdo con la disposición y la
cantidad de flexo sensores propias de este diseño. Para una mayor fidelidad de
los movimientos en un futuro desarrollo, es recomendable implementar más flexo
sensores o en su defecto, utilizar otro tipo de sensores que permitan emular más
exactamente los movimientos realizados con un guante instrumentado.
La característica inalámbrica del prototipo implementado fue desarrollada
mediante comunicación Bluethoot con ayuda de un dispositivo móvil. Este
protocolo es muy fiable, dadas las características que presenta, pues facilita la
comunicación entre el equipo móvil y la mano mecatrónica, eliminando de tal
forma los cables y conectores entre éstos, y generando así una pequeña red
inalámbrica entre el dispositivo móvil y el prototipo, en donde la sincronización es
bastante óptima. Para complementar esta propiedad se incorporó una batería tipo
LiPo, dotando de esta manera al prototipo con una independencia absoluta de
cables. Esta propiedad permite, de ser necesario, que el sistema en su conjunto
sea ejecutado a una distancia segura para el operador.
Con las pruebas efectuadas, se logró comprobar el buen desempeño del prototipo
en la ejecución de los movimientos básicos que emulan la mano humana, de
forma predefinida, por medio de un guante instrumentado y por medio de un
dispositivo móvil inalámbricamente. Adicionalmente se logró verificar el agarre del
prototipo, el cual permite manipular algunos volúmenes geométricos de manera
adecuada.
En segundo lugar se referencia el trabajo de la investigadora Evelyn Garnica
Estrada (2013), titulado “Robots Herramientas para las Aulas de Clase”. Este
trabajo tuvo como objetivo, Utilizar los robots como herramientas de aprendizajes
a través de plataformas robóticas multifunción en las aulas de clase. Realizado
en la Corporación Universitaria Republicana de la ciudad de Bogotá Colombia,
mayo de 2013. La investigación se abordó a través de una metodología
conductista, cognitivista, constructivista y el conectivista.
18
Alguno de los conceptos en que se apoya esta investigación, tiene que ver con “el
uso de robots como instrumento de apoyo a la formación de los estudiantes incide
en la generación de nuevos métodos y técnicas dentro de las metodologías
tradicionales empleadas. La estrategia didáctica necesaria para transformar los
procesos tradicionales de enseñanza, consiste en abordar un conjunto de
procedimientos, apoyados en técnicas de enseñanza a través de elementos
complementarios, que tienen por objeto llevar a buen término la acción didáctica,
es decir, alcanzar los objetivos de aprendizaje” (Abeli, 1995).
En tercer lugar se registra el trabajo del investigador Nelson Barrera Lombana
(2014), titulado “Uso de la robótica educativa como estrategia didáctica en el
aula”. Este trabajo tuvo como objetivo, motivar a los estudiantes y a los
educadores para que formulen y apliquen estrategias educativas innovadoras que
utilicen como instrumento didáctico plataformas robóticas y dispositivos
tecnológicos que hayan concluido su vida útil, realizado en la Universidad
Pedagógica y Tecnológica de Colombia. El estudio se aplicó a través de una
metodología de corte cualitativo, de investigación-acción en el aula, propuesto por
Kurt Lewin (Flick, 2004). Dentro de los resultados de esta investigación se
destacan los siguientes aspectos: se establecieron la unidades de sentido
deductivas, que a su vez se componían de sub-categorías deductivas que fueron
clasificadas en tres grandes categorías, así: a) unidad de sentido psicológica que
se compone de las categorías actitudinal, emocional y motivacional; b) unidad de
sentido intelectual, integrada por las categorías interpretativa, argumentativa y
propositiva; y c) unidad de sentido sociológica, compuesta de las categorías
inclusiva y cooperativa. Con base en estas unidades de sentido se desarrollaron
las siguientes actividades: observaciones participantes y orientación de
entrevistas no estructuradas focalizadas. A partir de los datos recopilados,
tabulados e interpretados, emergieron las unidades de sentido inductivas, que son

19
manifestaciones a nivel pormenorizado de las unidades de sentido deductivas,
estas surgen de la praxis investigativa.
En cuarto lugar se registra el trabajo del investigador Alfredo Gabriel Rivamar
(2011), titulado “Roboeduca: red de robótica educativa. Un espacio para el
aprendizaje constructivista y la innovación”. Este trabajo tuvo como objetivo,
realizar proyectos en los que mediante el diseño, la construcción y la
programación de robots los estudiantes puedan, por una parte, visualizar, explorar
y comprobar conceptos de razonamiento de las áreas de conocimiento
involucradas, y por la otra, formular y experimentar alternativas para solucionar
problemas o realizar tareas. Se busca además, estimular el desarrollo de
habilidades para trabajar colaborativamente con sus compañeros y para tomar
decisiones como equipo, esto se refiere a poder escucharse, a discutir y a respetar
las ideas y opiniones de otros, realizado en la Institución: ISFD y TN° 1003
“Normal Superior de Argentina. El estudio se abordó a través de una metodología
A-Modalidad 1 a 1: En el marco de pensar el ingreso de las TIC en las
Instituciones educativas en relación con nuevos saberes y como respuestas a
ciertas demandas del mundo del trabajo, y acompañando la progresiva
apropiación de aquellas y su uso para mejorar las prácticas áulicas habituales y
explorar nuevas con el objeto de mejorar la calidad educativa y formar jóvenes de
las escuelas secundarias para el mundo que las TIC han contribuido a crear, se
emplea el modelo 1 a 1 haciendo uso de los equipos de computación portátiles
distribuidos desde el gobierno nacional a docentes y alumnos en forma individual
de modo que cada uno tenga acceso directo, ilimitado, específico y ubicuo a la
tecnología de la información, de manera simultánea, contribuyendo a la
conformación de vinculaciones entre sí y con otras redes que exceden el tiempo
de concurrencia a la escuela. Dentro de los resultados de esta investigación se
destacan los siguientes elementos:
Prototipo del robot desarrollado utilizando las plataformas LEGO RCX o NXT.
Cuaderno de campo en formato digital.

20
Weblog del alumno.
Wiki del curso.
Webquest sobre diferentes propuestas realizadas por los estudiantes y/o el
docente facilitador.
Memoria de cada proyecto en Google Docs.
Registro fotográfico de cada proyecto realizado.
Instructivo de la construcción y registro del funcionamiento en formato digital. 21
Video demostrativo del funcionamiento del robot, para cada proyecto realizado, en
YouTube.
Comprensión de los roles involucrados en un proyecto de robótica educativa.
Participación en redes sociales y foros de intercambio.
Los trabajos revisados dan cuenta de que la robótica como recurso de enseñanza
y aprendizaje, requieren plantearse en función de las capacidades y desempeños
que se esperan consolidar en la población meta. Estas capacidades son el punto
de partida para delinear los énfasis de contenido, los desempeños deseados, las
tecnologías que se necesitan, los procesos de capacitación y seguimiento que hay
que diseñar. La robótica educativa es propicia para apoyar habilidades
productivas, creativas, digitales y comunicativas; y se convierte en un motor para
la innovación cuando produce cambios en las personas, en las ideas y actitudes,
en las relaciones, modos de actuar y pensar de los estudiantes y los educadores.
Si esos cambios son visibles en la práctica cotidiana, entonces estamos ante una
innovación porque la robótica habrá transcendido sus intuiciones y se reflejara en
sus acciones y productos.
Este proyecto, en sus objetivos, se referencia como similar con los revisados
anteriormente, dado que estos han abordado indagaciones y aplicaciones
precisas y particulares, por ejemplo, Prototipo de mano mecatrónica para

21
aplicaciones en robótica industrial, Robots Herramientas para las Aulas de clase,
Roboeduca: red de robótica educativa. Un espacio para el aprendizaje
constructivista y la innovación y uso de la robótica educativa como estrategia
didáctica en el aula.
Todos ellos en busca de mejorar los desarrollos de competencias de los
estudiantes en cuanto a la apropiación de las tecnologías de la informática para
mejorar el nivel educativo de los estudiantes en diferentes áreas del Saber.
En concordancia con lo anterior, un balance de estos trabajos que permitió ubicar
este proyecto en el sentido de que aborda aspectos distintos de la robótica, en
cuanto usa la robótica para el desarrollo de competencias significativas y mejorar
el aprendizaje, generar situaciones de rendimiento, de aplicación y participación
más efectiva en los procesos de formación integral de los estudiantes involucrados
en la investigación, porque muestra que la robótica educativa aplicada como
estrategia pedagógica en las áreas de matemática, física y tecnología e
informática promueve el desarrollo de competencias lógicas en los sistemas
numéricos, sistemas geométricos y en los sistemas de cómputos en programación
básica de Arduino.
De esta manera promueve en los docentes la innovación, en sus propuestas
pedagógicas de enseñanza-aprendizaje y despertar en los estudiantes la
curiosidad por indagar, investigar, hacerse interrogantes sobre cosas
desconocidas que pueden conocer y aplicarlas para la adquisición de
competencias que les permitan desarrollar habilidades y destrezas en la utilización
de nuevas herramientas para su propio beneficio.
4.2. MARCO TERÓRICO
La robótica es el bum de la tecnología moderna incluida en el campo educativo,
que se puede definir como la ciencia y la tecnología de los robots. Se ocupa del
diseño, manufactura y aplicaciones de los robots. La robótica combina diversas
disciplinas como son: la mecánica, la física, la electrónica, la informática, la

22
inteligencia artificial y la ingeniería de control, teniendo como base fundamental la
corriente eléctrica, los sistemas mecánicos, los sistemas electrónicos como
sensores ópticos, de ultrasonido, infrarrojos, magnéticos, de proximidad,
resistencias, motores, circuitos eléctricos como generadores, conductores, de
control y de protección que se utilizan para crear movimientos a los robots, bajo
estas perspectivas nuestro proyecto guarda relación con el proceso de
enseñanza-aprendizaje de estos mecanismos puesto que se utiliza la
programación de microchip de memorias para que ejecuten las ordenes de
movimientos programadas a cada robots, juegos de luces, alarmas construidas. El
desarrollo de este proyecto está basado en la placa electrónica Arduino con su
respectivo lenguaje de programación donde los estudiantes aprenden a darle
órdenes a cada robot para que estos la ejecuten una vez terminados.
Del mismo modo la robótica contribuye al desarrollo de la creatividad, innovación,
habilidades y destrezas en los estudiantes, lo cual va a permitir el avance
significativo de la práctica pedagógica de los docentes en el aula de clase y el
fortalecimiento del proceso de enseñanza-aprendizaje en las distintas áreas del
saber.
Según el artículo de Acuña A. (2006, p.2), se “considera como un motor para la
innovación”; es decir, la robótica educativa como un contexto de aprendizaje que
se apoya en las tecnologías digitales para hacer robótica que poseen cuerpo,
control y movimientos; primero mentales y luego físicos, construidos con diferentes
materiales y controlados por un computador mediante simulaciones o prototipos.
La robótica educativa, cada vez más, se posiciona como un elemento nuevo y
necesario de conocer por las nuevas generaciones. Las empresas e industrias
han incorporado procesos de producción y múltiples elementos que incluyen
automatismos y control, así como también, los ingenieros mecánicos, electrónicos
y los informáticos han asumido estos desarrollos. Sin embargo, en las últimas
décadas se muestra con mayor presencia la necesidad de formarse u obtener

23
alguna especialidad que abarque con mayor profundidad esos temas. En el caso
particular de la robótica educativa en América, existen iniciativas nacionales o
locales en algunas ciudades o países como, México, Brasil, Chile, Colombia,
Estados Unidos y Costa Rica.
A continuación se precisar algunos conceptos y definiciones de este lenguaje
técnico de la tecnología e informática, que son necesarios para la comprensión del
enfoque de este trabajo de investigación, desde el punto de vista teórico:
Definición de Robótica.
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño,
manufactura y aplicaciones de los robots. La robótica combina diversas
disciplinas, como son: la mecánica, la electrónica, la informática, la inteligencia
artificial y la ingeniería de control.
Automatización.
El término automatización se refiere a una amplia variedad de sistemas y procesos
que operan con mínima o sin intervención del ser humano, o para eliminar riesgos
para la manipulación humana.
Historia de Arduino
Arduino fue inventado en el año 2005 por el entonces estudiante del instituto
IVRAE Massimo Banzi,1 quien, en un principio, pensaba en hacer Arduino por una
necesidad de aprendizaje para los estudiantes de computación y electrónica del
mismo instituto, ya que en ese entonces, adquirir una placa de micro
1IVRAE Massimo Banzi. Teoría tomada de la página Web: http://arduinodhtics.weebly.com/historia.html

24
controladores eran bastante caro y no ofrecían el soporte adecuado; no obstante,
nunca se imaginó que esta herramienta se llegaría a convertir en años más
adelante en el líder mundial de tecnologías DIY (Do It Yourself). Inicialmente fue
un proyecto creado no solo para economizar la creación de proyectos
escolares dentro del instituto, si no, que además, Banzi tenía la intención de
ayudar a su escuela a evitar la quiebra de la misma con las ganancias que
produciría vendiendo sus placas dentro del campus a un precio accesible (1 euro
por unidad).
El primer prototipo de Arduino fue fabricado en el instituto IVRAE. Inicialmente
estaba basado en una simple placa de circuitos eléctricos, donde estaban
conectados un micro controlador simple junto con resistencias de voltaje, además
de que únicamente podían conectarse sensores simples como leds u otras
resistencias, y es más, aún no contaba con el soporte de algún lenguaje de
programación para manipularla.
Definición.
Arduino es una plataforma de hardware libre, basada en una placa con un
microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de la
electrónica en proyectos multidisciplinares.
¿Qué es Arduino?
Arduino es una plataforma de hardware y software de código abierto, basada en
una sencilla placa con entradas y salidas analógicas y digitales, en un entorno de
desarrollo que está basado en el lenguaje de programación Processing. Es decir,
una plataforma de código abierto para prototipos electrónicos. Al ser open source,
tanto su diseño como su distribución, puede utilizarse libremente para el
desarrollo de cualquier tipo de proyecto sin necesidad de licencia.
El proyecto fue concebido en Italia en el año 2005 por el zaragozano David
25
Cuartielles, ingeniero electrónico y docente de la Universidad de Mälmo (Suecia) y
Massimo Banzi, italiano, diseñador y desarrollador Web.
Fuente: tomada de la página web: https://www.arduino.cc/usa/arduino-uno-rev3
La teoría de José Alberto Maroto Centeno ( s.f, Página 2) dice que una máquina
simple es un dispositivo en la que tanto la energía que se suministra como la que
se produce se encuentran en forma de trabajo mecánico y todas sus partes son
sólidos rígidos. Las maquinas simples se clasifican en 6 tipos: Palancas, poleas,
ruedas y ejes, planos inclinados, tornillos y cuñas.
Máquina compuesta.
Según Maroto, (s.f, paginas 2,3) las máquinas compuestas son combinaciones de
estos 6 tipos de máquinas simples, que están formadas por dos o más máquinas
simples. Las máquinas empleadas en la actualidad son compuestas, y ejemplos
de ellas pueden ser: polipasto, motor de explosión interna (diesel o gasolina),
impresora de ordenador, bicicleta, cerradura, lavadora.
Transformación del movimiento.
En estos mecanismos, el tipo de movimiento que tiene el elemento de entrada del
mecanismo es diferente del tipo de movimiento que tenga el elemento de salida,
es decir, el tipo de movimiento se transforma en otro distinto, de ahí el nombre de
mecanismo de transformación.

26
Motores.
Un motor eléctrico es un dispositivo rotativo que transforma energía eléctrica en
energía mecánica. Es un dispositivo electromecánico que convierte una serie de
impulsos eléctricos en desplazamientos angulares discretos, lo que significa es
que es capaz de avanzar una serie de grados (paso) dependiendo de sus
entradas de control.
PICmicro
Un PICmicro es un circuito integrado programable. Microchip, su fabricante dice:
Programable Integrated Circuit. Programable quiere decir que se puede planificar
la manera cómo va a funcionar, que se puede adaptar a nuestras necesidades. En
otras palabras que el integrado es capaz de modificar su comportamiento en
función de una serie de instrucciones que es posible comunicarle. PIC Y
PICMICRO para todos los fines prácticos describen el mismo microcontrolador ya
que en 1997 Microchip registró el nombre PICMicro para su línea de
microcontroladores. Las aplicaciones de los PIC son realmente muy numerosas.
Control de Robots Casi se puede asegurar que no hay Robot que no incluya un
PIC en alguna de sus múltiples funciones. Son igualmente importantes en control
de servomecanismos, reconocimiento de voz, tareas secuenciales, etc.
Sensores Ópticos.
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas,
llamadas variables de instrumentación, y transformarlas en variables eléctricas.
Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad
lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza,
torsión, humedad, pH.
Sensor De Proximidad
El sensor de proximidad es un transductor que detecta objetos o señales que se
encuentran cerca del elemento sensor

27
Sensor capacitivo
La función del detector capacitivo consiste en señalar un cambio de estado,
basado en la variación del estímulo de un campo eléctrico. Los sensores
capacitivos detectan objetos metálicos, o no metálicos, midiendo el cambio en la
capacitancia.
Sensor inductivo
Los sensores inductivos de proximidad han sido diseñados para trabajar
generando un campo magnético y detectando las pérdidas de corriente de dicho
campo generadas al introducirse en él los objetos de detección férricos y no
férricos-
Sensor fin de carrera
El final de carrera o sensor de contacto son dispositivos eléctricos, neumáticos o
mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo
una cinta transportadora.
Sensor infrarrojo
El receptor de rayos infrarrojos suele ser un fototransistor o un fotodiodo. El
circuito de salida utiliza la señal del receptor para amplificarla y adaptarla a una
salida que el sistema pueda entender. La señal enviada por el emisor puede ser
codificada para distinguirla de otra y así identificar varios sensores a la vez esto es
muy utilizado en la robótica.
Los sensores infrarrojos pueden ser:
Sensor infrarrojo de barrera.
Sensor auto réflex.
Sensor réflex.
Sensor ultrasónico
28
Los sensores ultrasónicos tienen como función principal la detección de objetos a
través de la emisión y reflexión de ondas acústicas.
Sensor magnético
Los sensores de proximidad magnéticos son caracterizados por la posibilidad de
distancias grandes de la conmutación, detectan los objetos magnéticos que se
utilizan para accionar el proceso de la conmutación.
Los siguientes sensores son herramientas que se pueden trabajar con la placa
electrónica Arduino.
Fuente: tomada de la página web http://tienda.bricogeek.com
Circuito eléctrico
"Un Circuito Eléctrico es un conjunto de elementos conectados entre sí por los
que puede circular una corriente eléctrica".
La corriente eléctrica es un movimiento de electrones, por lo tanto, cualquier
circuito debe permitir el paso de los electrones por los elementos que lo
componen.

29
Generador: producen y mantienen la corriente eléctrica por el circuito. Son la
fuente de energía. Hay 2 tipos de corrientes: corriente continua y alterna (pincha
en el enlace subrayado si quieres saber más sobre c.c. y c.a.).
Pilas y Baterías: son generadores de corriente continua (c.c.).
Alternadores: son generadores de corriente alterna (c.a.).
Conductores: es por donde se mueve la corriente eléctrica de un elemento a otro
del circuito. Son de cobre o aluminio, materiales buenos conductores de la
electricidad, o lo que es lo mismo, que ofrecen muy poca resistencia a que pase la
corriente por ellos. Hay muchos tipos de cables eléctricos diferentes.
Receptores: son los elementos que transforman la energía eléctrica que les llega
en otro tipo de energía. Por ejemplo las bombillas transforma la energía eléctrica
en luminosa o luz, los radiadores en calor, los motores en movimiento, etc.
Elementos de mando o control: permiten dirigir o cortar a voluntad el paso de la
corriente eléctrica dentro del circuito. Tenemos interruptores, pulsadores,
conmutadores, etc.
Elementos de protección: protegen los circuitos y a las personas cuando hay
peligro o la corriente es muy elevada y puede haber riesgo de quemar los
elementos del circuito. Tenemos fusibles, magneto térmicos, diferenciales, etc.
Para simplificar el dibujo de los circuitos eléctricos se utilizan esquemas con
símbolos. Los símbolos representan los elementos del circuito de forma
simplificada y fácil de dibujar.
Veamos los símbolos de los elementos más comunes que se usan en los circuitos
eléctricos.

30
LED.
Según la “Revista Mater Magazine2”. La tecnología conocida como LED (por sus
siglas en Inglés, Light Emitting Diodo, que en español significa Diodo Emisor de
Luz) también conocida como Diodo luminoso consiste básicamente en un material
semiconductor que es capaz de emitir una radiación de electromagnética en forma
de luz.
Fuente: tomado de la página Web:
Símbolos de Electrónica básica
El protoboard o breadbord.
De acuerdo a la página Web “http://www.circuitoselectronicos.org3” El protoboard o
breadbord: Es una especie de tablero con orificios, en la cual se pueden insertar
componentes electrónicos y cables para armar circuitos. Como su nombre lo
indica, esta tableta sirve para experimentar con circuitos electrónicos, con lo que
se asegura el buen funcionamiento del mismo.
Estructura del protoboard: Básicamente un protoboard se divide en tres
regiones:
Fuente: tomada de la página Web: Símbolos de Electrónica básica
2 Revista Mater Magazine
3 http://www.circuitoselectronicos.org
31
A) Canal central: Es la región localizada en el medio del protoboard, se utiliza
para colocar los circuitos integrados.
B) Buses: Los buses se localizan en ambos extremos del protoboard, se
representan por las líneas rojas (buses positivos o de voltaje) y azules (buses
negativos o de tierra) y conducen de acuerdo a estas, no existe conexión física
entre ellas. La fuente de poder generalmente se conecta aquí.
C) Pistas: La pistas se localizan en la parte central del protoboard, se
representan y conducen según las líneas rosas.
5. METODOLOGÍA.
5.1. Tipo de Investigación.
Este es un estudio de tipo cualitativo con un método de acción-participación que
involucra a docentes y estudiantes en la comprensión de los fundamentos de la
electrónica (robótica) y su aplicación en el trabajo académico de aula para
fortalecer el desarrollo de competencias en las áreas de matemática, física y
tecnología e informática. La investigación-acción es un método de trabajo que
favorece la acción colectiva y participativa de los actores que en ella intervienen.
Jhon Elliott y Stephen Kemmis (2000) establece que:
“la investigación-acción se relaciona con los problemas prácticos cotidianos
experimentados por los profesores en vez de con los problemas teóricos
definidos por los investigadores puros en el entorno de una disciplina del
saber, de igual manera sostiene que el propósito de la investigación acción
consiste en profundizar la comprensión del profesor (diagnóstico) de su
problema. Por tanto adopta postura exploratoria frente a cualquier
definicion inicial frente a su propia situación que el profesor pueda
mantener, por lo tanto la investigación-acción adopta una postura teórica
según la acción emprendida para cambiar la situación se suspende

32
temporalmente hasta conseguir una comprensión más profunda del
problema práctico en cuestión, por ello la investigación acción interpreta lo
que ocurre desde el punto de vista de quienes actúan e intervienen en la
situación problema, por ejemplo profesores y alumnos, profesores y
directivos, en este orden de ideas Jhon Elliott establece que los hechos se
interpretan como acciones y transacciones humanas, en vez de como
procesos naturales sujetos a las leyes de la ciencia natural, las acciones y
transacciones de interpretan en relación con las condiciones que ellas
postulan, por ejemplo: la comprensión que el sujeto tiene de su situación y
las creencias que alberga sobre la misma, las intenciones y los objetivos del
sujeto, sus relaciones y decisiones, el reconocimiento de determinadas
normas, principios y valores para diagnosticar, el establecimiento de
objetivos y la selección de cursos de acción” (p., 5).
El trabajo, participativo se realizó a partir de la organización de semilleros de
investigación con estudiantes de los grados 8, 9 y 10 de bachillerato de la Institución
Educativa San José de Carrizal.
5.2 Diseño de Investigación.
Este estudio se realizó en tres fases, en concordancia con los tres objetivos
específicos, así:
Fase diagnóstica: tuvo como propósito identificar los niveles de competencias
que tenían los estudiantes de los grados 8, 9 y 10 en las áreas de matemática,
física y tecnología e informática.
En esta fase se utilizó como técnica la revisión de los informes académicos
bimestrales de 2015 y 2016 emitidos por los maestros de las áreas de
matemática, física y tecnología e informática y por los resultados de las
pruebas saber en los procesos sintéticos de calidad educativa.
Fase de diseño y aplicación: consistió en la elaboración de las estrategias
pedagógicas mediadas por la robótica para desarrollar las competencias que

33
permitan el aprendizaje significativo de los estudiantes, en las matemática,
física y tecnología e informática.
En esta fase se usaron técnicas como: guías de electrónica básica, con el
propósito de que los alumnos se apropiaran de conceptos básicos sobre el
manejo, uso y aplicabilidad de conocimientos en el diseño y armado de
circuitos electrónicos en la construcción de juegos de luces, alarmas y robots,
utilizando placas electrónicas de Arduino y de ensamble.
Guías de programación con Arduino: con la finalidad de programar los chips
de memorias, los sensores de ultrasonidos y sensores infrarrojos con la
ejecución de comandos de órdenes transmitidas por un computador a la placa
de Arduino para realizar movimientos en diferentes direcciones que los robots
las reciban y las ejecuten.
Diario de campo: Se utilizó con el fin de sistematizar detalladamente las
experiencias que los alumnos iban obteniendo a medida que se avanzaba en el
proceso teórico-práctico de la investigación y obtención de productos.
Fase de Valoración: en esta fase se analizaron los avances y limitaciones
del estudio en relación con los niveles de competencias de los estudiantes en
las áreas de matemática, física, tecnología e informática, después de aplicar
las estrategias pedagógicas mediadas por la robótica, se establecieron los
siguientes instrumentos de valoración, se usaron las siguientes técnicas:
Diario de campo: aquí se retomaron las limitaciones y los avances anotados en cada
sesión que tuvieron los estudiantes durante el proceso de capacitación teórico-práctico
de diseño, armado y programado con el software de la plataforma Arduino de los
juegos de luces, alarmas y robots.
Mesa Redonda: a partir de unas preguntas guías elaboradas por el maestro,
previamente, se abrió el debate para discutir las limitaciones y avances en el
desarrollo de las actividades que fueron programadas en las sesiones de clase y
determinar que estrategias se podían implementar para superar las dificultades y
34
mejorar las competencias de los alumnos en las áreas de matemática, física y
tecnología e informática en el avance del proyecto. De igual forma se destacaron los
aprendizajes y avances académicos favorecidos por el desarrollo del proyecto.
5.3. POBLACION Y MUESTRA
La población estudiantil de la Institución Educativa San José de Carrizal, jornada
de la mañana, está conformada por 345 estudiantes, de la cual se tomó una
muestra de 100 estudiantes de los grados 8, 9 y 10. Esta muestra se seleccionó
por voluntad propia de los estudiantes que una vez socializado el proyecto
decidieron participar en él.
6. RESULTADOS Y DISCUSIÓN.
6.1. Fase Diagnóstica.
En esta primera fase, después de haber realizado un análisis de los niveles de
competencias de los estudiantes, según los resultados académicos bimestrales y
prueba saber obtenidos en el año 2016, en el proceso de los índices sintéticos de
calidad educativa en que se encontraban los estudiantes de los grados 8, 9 y 10,
se tuvo como resultados el fortalecimiento de las competencias básicas en la
acción-participación del trabajo en equipo en el proceso de investigación con los
estudiantes en las áreas de matemática y tecnología e informática.
Los resultados de esta fase diagnóstica se describen por grados, de acuerdo con
las dos áreas especificadas arriba.
En primer lugar, los resultados arrojados por el rendimiento académicos para 2016
de los estudiantes de grado octavo (8°) en el área de matemática se evidencia
que el 10% de los estudiantes tuvieron un rendimiento académico, bajo de
acuerdo con los informes académicos bimestrales presentado por los profesores
del área, que con relación al sistema evaluativo institucional se ubican en la
escala valorativa de 1 a 2,9 (bajo) y 88% ubica de en un nivel básico de 3 a 3.9; y
el 2% se ubica de 4 a 4.9 en un nivel alto, sin llegar en un mínimo porcentaje al

35
nivel superior, dejando entrever deficiencias existente de los estudiantes en esta
área.
De igual forma en el grado (8°), en el área de Tecnología e Informática, el 6% de
los estudiantes tuvo un rendimiento académico bajo. De acuerdo con la escala
valorativa del sistema general de evaluación de la institución, el 90% se ubica en
el nivel básico y un 4% se ubica en el nivel alto, quiere decir que el 94% de los
estudiantes de grado octavo no pudieron superar los niveles mínimos de
competencias establecidos por la institución.
Bajo estas perspectivas en el año 2016 el desarrollo de las competencias de los
estudiantes de grado octavo fueron básicamente deficientes en su aprehensión,
poco interés, desmotivación, tal vez se debió a que los docentes no aplicaron las
estrategias pedagógicas que les permitiera avanzar en el proceso de enseñanza-
aprendizaje de sus estudiantes.
Para el grado noveno (9º), el rendimiento académico en el área de matemática en
el año 2016 con relación a los estándares básicos del sistema evaluativo
institucional se ubica un 10% en el nivel bajo, un 85% en el nivel básico y un 5%
en el nivel alto, sin que se llegara a un mínimo en el nivel superior, en el área de
matemática, que cobró la pérdida del año a los estudiantes, dejando al cuerpo de
profesores y directivos bastante preocupados, en relación con que si en realidad
se están aplicando estrategias pedagógicas que demuestren efectividad para que
los estudiantes alcancen las competencias necesarias y superen sus dificultades
en esta área
De igual manera la prueba SABER arrojó resultados bastante preocupantes ya
que en el año 2016 el 30% de los estudiantes se ubicaron en la escala valorativa
del ICFES en insuficiente, el 56% en la escala mínima, el 15% en la escala
satisfactorio y 0% en la escala avanzado de acuerdo al índice sintético de calidad
educativa. Así se representa en la siguiente tabla:

36
INSUFICIENTE MÍNIMO SATISFACTORIO AVANZADO
Fuente: tomada de la página web ICFES.GOV.CO.
Como se puede notar en la gráfica, los resultados de Prueba SABER en el área
de matemática de grado noveno, no se han podido nivelar con los puntajes del
Departamento de Córdoba y los puntajes promedios nacionales. Lo único que sí
se ha podido superar es el promedio del Municipio de San Carlos, con relación a
las demás instituciones educativas que ofrecen el servicio público educativo en
este municipio.
Analizando los resultados del informe académico bimestral presentado por el
profesor del área de tecnología e informática en el grado noveno del año 2016 con
relación a los estándares básicos del sistema evaluativo institucional se encontró
que un 10% de los estudiantes reprobaron el año escolar, ubicados en un nivel
bajo, de 1 a 2,9 en la escala evaluativa institucional; un 88% en el nivel básico; y
un 2% en el nivel alto, sin que se muestren avances significativos superiores, que
es el máximo nivel evaluativo establecido por la institución en el currículo,
De la misma forma los resultados obtenidos en grado décimo en el área de
matemática se observó que en un 89% de los estudiantes tuvieron un rendimiento
académico básico, no superando el mínimo del sistema evaluativo de la
institución, y un 5% con un nivel bajo en la escala valorativa de 1 a 2.9 en 2016,
sumado a la deserción escolar que fue del 6%: Esto quiere decir que,

37
posiblemente, las prácticas educativas tradicionalistas aplicadas por los docentes
presentan deficiencias en el proceso de enseñanza-aprendizaje en esta área.
Observando los resultados académicos en el área de física en grado décimo se
estableció que el 3% de los estudiantes para el año 2016 tuvieron rendimiento
académico bajo de acuerdo a la escala valorativa que va de 1 a 2.9, un 95% se
ubicó en la escala valorativa de 3 a 3.9 en el nivel básico, un 2% se ubicó en el
nivel alto, de 4 a 4.5, como se puede apreciar los resultados académicos
obtenidos por los estudiantes en esta área no ha sido satisfactorio para alcanzar
los niveles medios de las competencias que debieran tener los alumnos en este
grado.
Así mismo en el área de Tecnología e Informática los resultados en el rendimiento
académico bimestral, se pudo constatar que un 2% estuvo por debajo del mínimo
necesario para alcanzar los objetivos, es decir, que se ubicaron en la escala
valorativa del sistema de evaluación institucional en un nivel bajo de 1 a 2.9 y un
95% en el nivel básico en la escala 3 a 3.9 y el 3% se ubicó en el nivel alto de la
escala valorativa, no alcanzando el nivel superior, esto demuestra que las
estrategias pedagógicas que se vienen aplicando no permiten desarrollar en los
estudiantes sus capacidades para superar sus dificultades en el desarrollo de
competencias y potencialidades en los procesos cognitivos de los estudiantes.
En conclusión, se observa que en las tres áreas se vienen desarrollando desde
una visión tradicionalista, según la cual los docentes que enseñan estas áreas
aplican estrategias metodológicas, en las que el maestro es el que explica la clase
y los alumnos repiten el conocimiento, es decir, que hay poca creación de
conocimiento nuevo que generen los estudiantes para compartir criterios de
discusión sobre temas desarrollados en clase. De esta forma, la evaluación de los
estudiantes es limitada, ya que depende en su gran mayoría de preguntas
directas con temáticas repetitivas que no ponen a pensar al alumno sobre
circunstancias más allá de la lectura de un texto, cuando se realizan talleres con
preguntas de análisis crítico. La solución de situaciones problémicas, se les

38
dificulta debido a que es poca la agilidad mental para resolverlos, y si son
exámenes tipo prueba saber se observa la dificultad que poseen para interpretar y
dar respuesta a las preguntas de forma acertada.
Al analizar estas debilidades que presentaron los alumnos en la fase diagnóstica
en el proceso de enseñanza-aprendizaje, se construyó una guía de electrónica
básica, la cual permitió desarrollar un orden de secuencias de conocimientos
aplicados de la electricidad, electrónica y diseño de circuitos electrónicos para
desarrollar en teoría y hacerlo real en la práctica de laboratorio, la cual permitió
comprender las funciones básicas en el manejo, uso y transformación de la
energía a través de elementos como resistencia, voltaje, amperaje, intensidad de
corriente y elementos electrónicos con funciones específicas, desarrollando en los
estudiantes estrategias pedagógicas como la manipulación y transformación de la
corriente eléctrica en la obtención de elementos como juegos de luces, alarmas
con la tarjeta Arduino y protoboard (Ver anexos: “Guía de Electrónica básica”).
6.2. Fase de diseño y aplicación
Esta fase consistió en la elaboración y aplicación de las estrategias pedagógicas
mediadas por la robótica para desarrollar las competencias que permitan el
aprendizaje significativo de los estudiantes, en las matemática, física y tecnología
e informática.
Dentro de la estrategia metodológica de esta fase se aplicaron dos guías de
trabajo. En la primera, se orientó la realización de un trabajo introductorio con el
que se buscó sentar las bases del conocimiento mínimo necesario para el trabajo
con electrónica y robótica, en la adquisición de nuevos conceptos clave que
permitieron dar paso a un siguiente nivel. De esta forma, el propósito de esta guía
fue lograr un mayor nivel de apropiación de las diferentes temáticas y un mayor
dominio de los nuevos recursos mediante el ejercicio de la experimentación. En la
segunda guía se partió de las bases adquiridas previamente en la primera guía y
sucesivamente sobre la segunda guía se trabajó con habilidades específicas que
permitieron a los estudiantes comprender la lógica para la elaboración de códigos de

39
programación, habilidades para la interpretación de los mismos y destrezas para el
ajuste de bloques de código con el propósito de ejecutar tareas específicas más
complejas de los nuevos recursos adquiridos en la programación de los robot.
6.2.1. Resultados de la primera guía.
De esta forma la guía de electrónica básica se orientó y
explicó para que los estudiantes comenzaran a
construir en primer lugar un circuito electrónico Básico
de encender y apagar un LED con cables, protoboard,
resistencias, bombillas LED y tarjeta Arduino.
Los alumnos trabajaron en equipo, donde
cada uno aportó ideas del diseño del circuito
para armarlo. Una vez armado, un alumno
inserta el códec de programación de la
computadora a la tarjeta Arduino, donde van
las órdenes para encender el LED, Después
los alumnos agregaron un Suiche en serie entre la resistencia y el led, teniendo
como resultado que al presionar el suiche se enciende el led y al soltarlo este se
apaga.
Como segunda actividad se construyó un circuito electrónico que simulara un
semáforo utilizando los siguientes materiales:
Arduino, Protoboard, 1 Led Verde, 1 Led Amarillo, 1 Led Rojo, 3 Resistencias
330 ohm y Varios cables.
Los alumnos en grupo comenzaron a identificar en el diseño del circuito dónde
iban a conectar cada cable de la tarjeta Arduino a la protoboard: entradas
positivas y negativas. Una vez ubicados los cables, conectaron las bombillas led
40
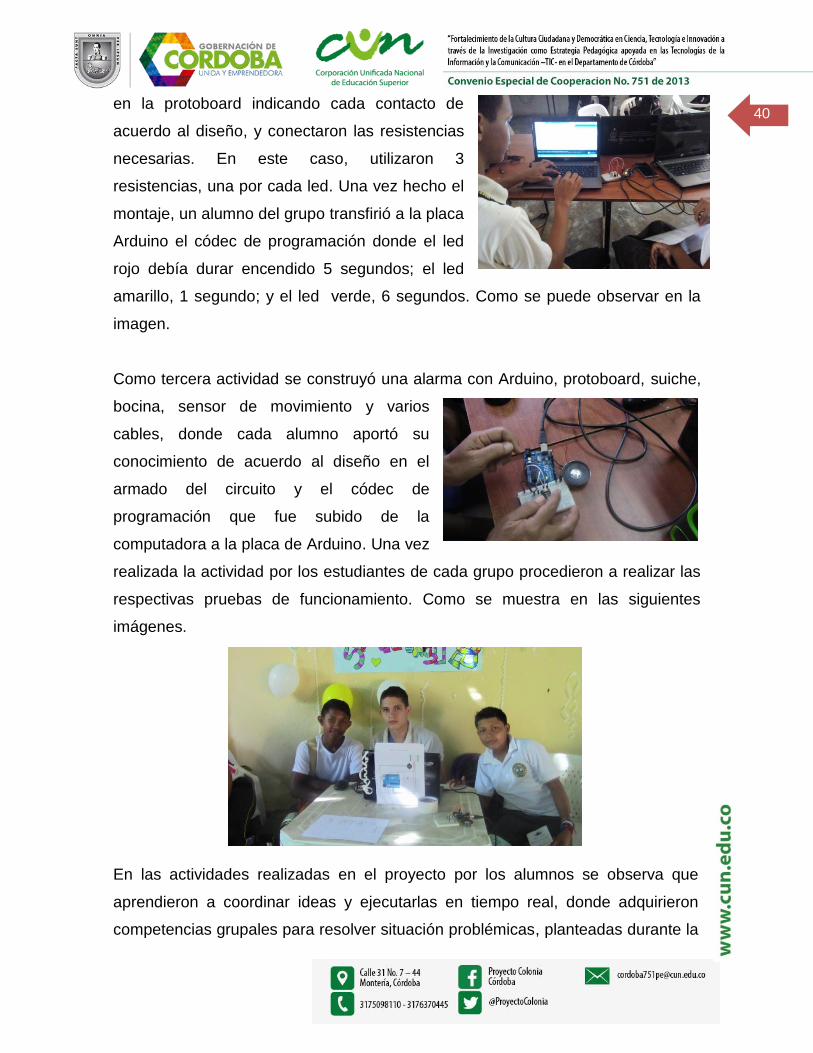
en la protoboard indicando cada contacto de
acuerdo al diseño, y conectaron las resistencias
necesarias. En este caso, utilizaron 3
resistencias, una por cada led. Una vez hecho el
montaje, un alumno del grupo transfirió a la placa
Arduino el códec de programación donde el led
rojo debía durar encendido 5 segundos; el led
amarillo, 1 segundo; y el led verde, 6 segundos. Como se puede observar en la
imagen.
Como tercera actividad se construyó una alarma con Arduino, protoboard, suiche,
bocina, sensor de movimiento y varios
cables, donde cada alumno aportó su
conocimiento de acuerdo al diseño en el
armado del circuito y el códec de
programación que fue subido de la
computadora a la placa de Arduino. Una vez
realizada la actividad por los estudiantes de cada grupo procedieron a realizar las
respectivas pruebas de funcionamiento. Como se muestra en las siguientes
imágenes.
En las actividades realizadas en el proyecto por los alumnos se observa que
aprendieron a coordinar ideas y ejecutarlas en tiempo real, donde adquirieron
competencias grupales para resolver situación problémicas, planteadas durante la

41
intervención del proyecto en las áreas de matemática, física y tecnología e
informática.
De esta manera los estudiantes aplicaron los conocimientos algorítmicos y lógicos
en el área de matemática, en el área de Física los conocimientos de Tensión,
resistencia, intensidad de corriente, circuitos y conducción de corriente a través de
conectores, en el área de tecnología e informática los conocimientos de lógica de
programación, diagrama de flujo, codificación y ejecución de comandos de
órdenes, además del uso de la software de aplicación y manejo de la
computadora.
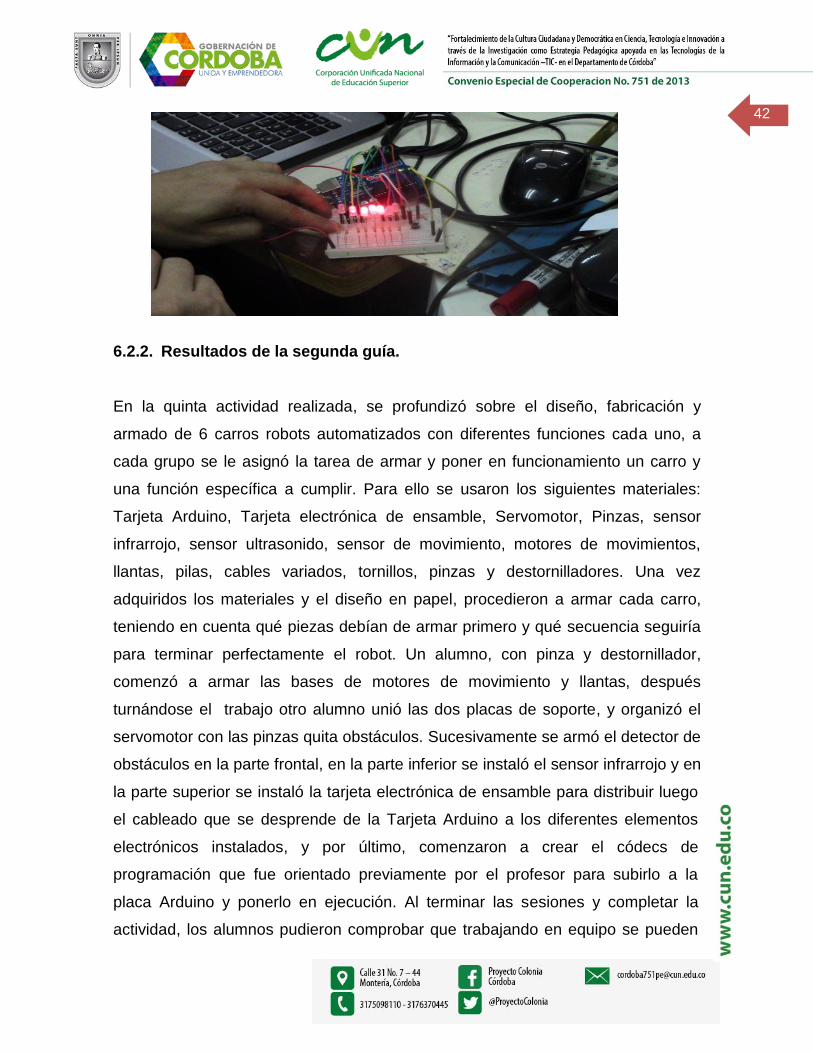
En la cuarta actividad se fue profundizando el conocimiento en circuitos más
complejos elevando el nivel de conocimiento en la
construcción del juego de luces del auto fantástico, para
ello los estudiantes utilizaron los siguientes elementos:
Arduino, protoboard, 8 led, 8 resistencias, un suiche,
varios cables como se observa en la imagen.
Para comenzar a armar el juego de luces cada grupo reunido comenzó a
identificar la entrada de corriente y el cable neutral, que va conectado del Arduino
a la protoboard y viceversa, después identificar el positivo de cada led irlos
conectando en serie en la protoboard y conectar una resistencia 330 ohmios para
reducir el voltaje a cada led, conectar un suiche para darle intensidad de
luminosidad a los led, y por último, escribieron el códec en la plataforma de
Arduino y los enviaron de la computadora a la tarjeta para su ejecución, una vez
terminado el proceso realizaron la prueba y adquirieron nuevas competencias de
aprendizaje, tales como: Conocimientos básicos de corriente eléctrica, voltaje,
resistencia, potencia e intensidad dentro de un circuito eléctrico, capacidad para
interpretar y armar un circuito eléctrico que simule las luces del auto fantástico
que se puedan utilizar como luces navideñas. En la siguiente imagen se
evidencia el resultado de ese proceso.
42
6.2.2. Resultados de la segunda guía.
En la quinta actividad realizada, se profundizó sobre el diseño, fabricación y
armado de 6 carros robots automatizados con diferentes funciones cada uno, a
cada grupo se le asignó la tarea de armar y poner en funcionamiento un carro y
una función específica a cumplir. Para ello se usaron los siguientes materiales:
Tarjeta Arduino, Tarjeta electrónica de ensamble, Servomotor, Pinzas, sensor
infrarrojo, sensor ultrasonido, sensor de movimiento, motores de movimientos,
llantas, pilas, cables variados, tornillos, pinzas y destornilladores. Una vez
adquiridos los materiales y el diseño en papel, procedieron a armar cada carro,
teniendo en cuenta qué piezas debían de armar primero y qué secuencia seguiría
para terminar perfectamente el robot. Un alumno, con pinza y destornillador,
comenzó a armar las bases de motores de movimiento y llantas, después
turnándose el trabajo otro alumno unió las dos placas de soporte, y organizó el
servomotor con las pinzas quita obstáculos. Sucesivamente se armó el detector de
obstáculos en la parte frontal, en la parte inferior se instaló el sensor infrarrojo y en
la parte superior se instaló la tarjeta electrónica de ensamble para distribuir luego
el cableado que se desprende de la Tarjeta Arduino a los diferentes elementos
electrónicos instalados, y por último, comenzaron a crear el códecs de
programación que fue orientado previamente por el profesor para subirlo a la
placa Arduino y ponerlo en ejecución. Al terminar las sesiones y completar la
actividad, los alumnos pudieron comprobar que trabajando en equipo se pueden
43
lograr los objetivos propuestos y adquirir competencias en el aprendizaje de
conocimientos nuevos, que puedan aplicar en las áreas de matemática, física y
tecnología e informática. Las siguientes imágenes ilustran ese proceso de trabajo
y de aprendizaje colectivo.
De igual manera la segunda guía de programación con Arduino en el área de
tecnología e informática permitió programar los chips de memorias, los sensores
de ultrasonidos, sensores infrarrojos y sensores de movimientos, con la ejecución
de comandos de órdenes transmitidas por un computador a la placa de Arduino
para activar los juegos de luces, alarmas y los movimientos en diferentes
direcciones de los robots, y el manejo de la programación básica de la plataforma
de Arduino como estrategia pedagógica permitió fortalecer en esta área el sistema
de diagramación de flujo, el sistema de secuencia lógica, codificación y
programación de una memoria para que ejecute órdenes de comandos dirigidos a
funciones específicas de los robots como se muestra en la imágenes.

44
Por último se obtuvo un producto terminado de 5 robots con el mismo diseño pero
con diferentes funciones y uno diferente, que se pueden utilizar educativamente o
empresarialmente, los cuales se presentan a continuación:
1. Robot seguidor de línea: en esta imagen se
muestra el sensor de infrarrojo y el funcionamiento
que detecta la línea negra con un rayo de luz
invisible al ojo humano, siguiéndola sin salirse de
su trayectoria.
2. Robot evasor de obstáculos: en esta imagen se
muestra el funcionamiento del sensor de ultrasonido,
el cual envía una señal por medios de ondas como
las emitidas por los murciélagos para detectar
comida al recibir de vuelta el mensaje el robot
detecta el obstáculo y lo evade.
3. Robot de ataque: en esta imagen se muestra el modo de
funcionamiento del servomotor que con el detector de
obstáculos cierra las pinzas para agarrar cuando encuentra
un obstáculo y lo retira para seguir la marcha, con este
elemento se podían explicar diferentes conceptos geometría
en el área de matemática como por ejemplo la apertura del
ángulo y el cierre para apretar los obstáculos encontrados en el camino.
4. Robot retira obstáculos: en esta práctica se trabajaron
con todos los sensores del robot, de forma que pudiera
seguir una línea negra, y por medio del ultrasonido
detectar objetos para sujetarlos con la pinza y retirarlos
de su trayectoria.

45
5. Robot Tele-operado: esta práctica se desarrolló en el
proyecto y se llevaron 6 bluetooth para manejar por
medio de una aplicación móvil el robot desde un
celular, en la imagen se observa cómo el robot tele-
operado mueve un objeto con el servomotor apretando
y soltando las pinzas, con movimientos atrás, adelante,
izquierda y derecha en diferentes direcciones desde el
dispositivo móvil con botones programados para
ejecutar todas las funciones del robot.
6. Robot a control remoto: en esta práctica se diseñó un
robot diferente, y se trabajaron con todos los sensores
del robot de forma que pudiera ser manejado por un
control para seguir adelante, retroceder, girar a la
derecha y girar a la izquierda y detectar obstáculos.
En conclusión se observa el fortalecimiento en el área de Física, el sistema de
medidas eléctricas, desplazamiento, fuerza, velocidad y mecánica de algunos
elementos en el diseño de circuitos electrónicos, en el área de matemática,
fortalece el sistema lógico, algorítmico, numérico, métrico, geométrico y de
medidas y en tecnología e informática el manejo de herramientas tecnológicas en
los procesos de armado de los robot y la programación lógica del lenguaje de
Arduino a través de los computadores.
46
6.3. Fase de Valoración:
En charlas realizadas con los estudiantes y anotadas en el diario de campo,
sostuvieron que era un sistema novedoso para ellos, que les permitió comprender
y fortalecer los conocimientos básicos de energía y electrónica, aplicado bajo un
ambiente tecnológico con una metodología de enseñanza-aprendizaje diferente a
las clases diarias impartidas por los profesores, pues, para ellos era de mucha
importancia aprender a manipular y crear cosas nuevas en la adquisición de
competencias cognitivas, para comprender los procesos matemáticos, la física y la
tecnología e informática, ya que trabajar en equipo les facilitaba llevar la teoría a la
práctica y desarrollar habilidades mentales en la construcción y elaboración de
circuitos y programación de los robot.
En conclusión los testimonios dados por algunos alumnos como Carmen Melisa
Hernández Rodríguez de grado octavo, manifestó que aprendió de la robótica
como introducirle información y los mecanismos que utilizamos en el trabajo y
como medir la altura de las personas, Cesar Miguel Meza Montalvo del grado
noveno expresó que la robótica para él era algo sencillo y que no le prestaba
atención y que ahora sí que es espectacular y que aprendió muchas cosas de la
robótica como controlar un robot por medio de los computadores y como darle al
robot toda la información con la computadora para que ande y se mueva y realice
todas sus funciones, lo que más le gustó fue el robot evasor de obstáculos y que
este trabaja con el servomotor y seguidor de línea, en una tercera entrevista a la
alumna Ruth Esther Sánchez Alarcón del grado décimo expreso que le gustó
robótica porque aprendió muchas cosas, como programar la placa Arduino,
también hacer que el carro agarre los obstáculos y los saque del camino y le
parece muy importante en la vida de ellos.
En charlas con los padres de familia que fueron invitados a la muestra expositiva
algunos quedaron impactados con el trabajo que sus hijos venían desarrollando
en esta investigación, ya que ellos pensaban que este proyecto no les dejaba
enseñanza a los estudiantes y que era una pérdida de tiempo, pero al ver la

47
realidad de lo que eran capaces de realizar sus hijos, y construir máquinas
automáticas les cambio la forma de pensar y de querer motivar a los estudiantes
investigadores en el desarrollo del proyecto.
En cuanto al cuerpo de docentes expresaron que es una forma de aplicar nuevas
estrategias pedagógicas y de ver el proceso de enseñanza-aprendizaje como un
libro abierto, donde existe un sinfín de posibilidades para trabajar las áreas de
matemática, física y tecnología e informática de forma transversal, y que la
tecnología como innovación le aporta a estas áreas fundamentos valederos, que
trascienden en la adquisición de nuevas herramientas metodológicas como lo es la
guía de electrónica básica y guía de programación con la plataforma de Arduino,
en la aprehensión del conocimiento y desarrollo de competencias para el
mejoramiento educativo de los estudiantes.
Bajo estas perspectivas se puede observar que las clases tradicionalistas todavía
se están impartiendo en la escuela, concepto que debe ser transformado a una
nueva forma de enseñanza pedagógica y de aplicaciones de nuevas estrategias
que les permitan a los estudiantes utilizar herramientas tecnológicas e innovar, es
decir, dejar la viaja escuela y enseñar para el futuro.

48
7. CONCLUSIONES Y RECOMENDACIONES.
Este trabajo deja como enseñanza principal que el trabajo pedagógico de aula
tiene que alejarse de la perspectiva tradicional de enseñar contenidos
fragmentados en las distintas áreas del saber. Esto quiere decir que es necesario
integrar contenidos de diferentes asignaturas, alrededor de proyectos de aula en
los que los estudiantes le encuentres sentido a las teorías mediante su aplicación
en la práctica. Por eso, las actividades prácticas se desarrollaron sin ningún
percance y en el transcurso de ellas se pudo percibir que los estudiantes han
adquirido diferentes habilidades que les permitieron hablar con claridad acerca de
lo que se estaba trabajando en las sesiones de capacitación.
Los docentes que participamos en esta investigación, estamos muy motivados
y con ganas de aplicar los conocimientos del trabajo realizado, al desarrollo de
las clases diarias a los estudiantes y con las diferentes herramientas
pedagógicas desarrolladas en la investigación, puesto que se ha comprendido
la trascendencia del trabajo en equipo, real y situado. Esto crea, además,
confianza en los estudiantes respecto de lo que les proponen los maestros en
sus clases, lo que conduce a una buena disposición para el aprendizaje
significativo.
Se percibe de una forma muy evidente que a los estudiantes le emociona y les
gusta la temática presentada, en todo momento están pendientes de las
explicaciones ofrecidas por el formador y participaron activamente realizando
preguntas y comentarios que ayudan a la realización de las diferentes
actividades propuestas. De esta manera le dan sentido al estudio, a la
adquisición de conocimientos nuevos, a la vez que son capaces de dar valor a
sus esfuerzos y comprender que el conocimiento nuevo se construye desde

49
uno mismo, desde sus propias prácticas. Tanto docentes como estudiantes
llegan a estas comprensiones.
Los estudiantes lograron adquirir los diferentes conceptos explicados durante
la investigación, esto se pudo comprobar el día de la muestra en la cual a ellos
les toco realizar el rol de expositores.
La metodología utilizada durante el programa fue la apropiada logrando
transmitir de la mejor manera los conceptos a estudiantes, docentes, padres
de familia, directivos y demás miembros de la comunidad educativa en general.
Los directivos quedaron satisfechos con el proyecto y esperan que el docente
investigador, docentes y estudiantes sigan creando proyectos de investigación
educativos que permitan alcanzar en sus estudiantes un aprendizaje
significativo y desarrollar competencias que les permitan mejorar su forma de
vida.
De ahí se desprende una recomendación para docentes y directivos: hacer un
esfuerzo por transformar las metodologías tradicionales de enseñanza en las
diferentes áreas, impulsando el trabajo por proyectos, propiciando así el trabajo
conjunto y colaborativo, dándole sentido a los contenidos a través de su
aplicación práctica. De esta manera se recomienda incluir esta posibilidad de
trabajo en el currículo de la Institución, para que se generalice una nueva
dinámica de trabajo en el aula, acorde con las nuevas formas de acceso al
conocimiento, haciendo uso efectivo de la tecnologías de información, con el
propósito de lograr mejores desarrollos en la calidad educativa de los
estudiantes.

50
8. REFERENCIAS BIBLIOGRÁFICAS.
Ministerio de Educación Nacional (s.f). Cartilla robótica ambiental págs. 68.
Computadores para educar.
Ministerio de Educación Nacional (s.f). Manual de sensores págs. 147. Computadores
para educar.
Fuente: tomada de la página web http://tienda.bricogeek.com
Ministerio de Educación Nacional (s.f). Cartilla simbología electrónica básica págs. 4.
Computadores para educar.
Manual de programación Arduino. Tomado de la página web: http://dfists.ua.es/~j
pomares/arduino/page_02.htm,
Roboeduca: red de robótica educativa. Un espacio para el aprendizaje
constructivista y la innovación. Consultado en:
http://www.electronicaestudio.com/docs/mundodelos_pic.pdf
Símbolos electronicos.pdf. Consultado en: https://electronica-
analogica.wikispaces.com/file/view/
Fuente consultada en: link www.scielo.org.co/pdf/prasa/v6n11/v6n11a10.pdf.
Fuente tomada de la página web: https://www.arduino.cc/usa/arduino-uno-rev3.
Fuente: tomada de la página web http://tienda.bricogeek.com
Fuente: tomado de la página Web: Símbolos de Electrónica básica (escribir esta
Brian Moreno y Esteban Velásquez. Prototipo de mano mecatrónica para
aplicaciones en robótica industrial. Consultado en: https://es.
scribd.com/document/330215699/MECA0110-pdf.
Fuente: tomada de la página web ICFES.GOV.CO.

51
Garnica, Evelyn (2013). Robots Herramientas para las Aulas de Clase. Consultado
en: https://cdn. educ.ar/repositorio/Download/file?file_id=0d99dc0f-e30f-439d-
9bca-459dcf751f19
Rivamar, Alfredo. Roboeduca: red de robótica educativa un espacio para el
aprendizaje constructivista y la innovación. Consultado en:
https://cdn.educ.ar/repositorio/ Download /file?file_id= 0d99dc0f-e30f-439d-9bca-
459dcf751f19.
Barrera Nelson. Uso de la robótica educativa como estrategia didáctica en el
aula. Consultado en: http://www.scielo.org.co/pdf/prasa/v6n11/v6n11a10.pdf.

52
9. ANEXOS
PROEYECTO DE ROBÓTICA EN AMBIENTES ESCOLARES.
GUÍA DE ELECTRÓNICA BÁSICA Y GUIA DE PROGRAMACION CON
ARDUINO
9.1. Guía de Electrónica Básica
Sesión 1: Electrónica creativa.
Objetivo General.
Comprender los sistemas electrónicos para aplicarlos en diseños y construir
circuitos electrónicos, que les permitan a los estudiantes ampliar sus
conocimientos en las áreas de matemática, física y tecnología e informática.
Competencias básicas que los estudiantes estarán en capacidad de desarrollar al
finalizar esta guía.
1. Área de Matemática.
¿Qué es la electrónica?
La electrónica es una rama de las ciencias, específicamente de la física y la
ingeniería, que se encarga de estudiar y diseñar sistemas cuyo principio de
funcionamiento se basa en el manejo controlado de un flujo microscópico de
corriente.
Usando electrónica podemos construir y diseñar sistemas autónomos que se
encarguen de realizar alguna tarea específica, como por ejemplo el tiempo que

53
tarda en encenderse una bombilla, el control de temperatura de un sistema de
calefacción o incluso un robot.
¿Para qué sirve la electrónica?
Esa es una pregunta muy común, la electrónica tiene un papel muy importante en
nuestras vidas, estamos tan acostumbrados a
ella que ni siquiera la notamos en nuestro día a
día, usando la electrónica podemos construir y
diseñar sistemas autónomos que se encarguen
de realizar tareas específicas, como por ejemplo
el control de iluminación de un cuarto, las luces
automáticas en la noche o incluso para la
construcción de un robot.
¿En dónde está presente la electrónica?
Muchas de las cosas que vemos a nuestro alrededor
funcionan con sistemas electrónicos desde unos
audífonos comunes que usas para escuchar tu música
favorita, hasta supercomputadores.
También podemos pensar en sistemas mucho más avanzados como sondas
espaciales, control inteligente para vehículos, cámaras digitales, etc.

54
CONCEPTOS BÁSICOS.
CORRIENTE ELÉCTRICA
Primero que todo debemos entender que es un electrón:
comúnmente representado como (e-), es una partícula
subatómica con carga negativa, con la cual se explican todos
los fenómenos eléctricos; parece difícil el concepto verdad,
pero solo imagínate un electrón como un estudiante
cualquiera de tu salón que se desplaza en cualquier
dirección.
Ahora bien, la corriente eléctrica es un flujo microscópico de electrones libres a
través de un conductor; recuerdas el estudiante que imaginamos como un
electrón, bueno, imagina ahora no uno, sino una gran cantidad de estudiantes que
se desplazan por un pasillo escolar, ese desplazamiento de estudiantes o
“electrones” se conoce como corriente eléctrica y se mide en Amperios. Otra forma
de entender el concepto es percibiendo el flujo de agua que corre por una tubería,
donde la tubería equivale al conductor y el agua corriendo a la corriente eléctrica.
VOLTAJE
El voltaje, también llamado “Tensión” o “Diferencia
de potencial” es el encargado de acelerar los
electrones a través del circuito y es necesario para
establecer una corriente eléctrica. Nos podemos
hacer una idea de una fuente de voltaje pensando
en un tanque de agua que se encuentra elevado,
el flujo de agua a través de la tubería es el
equivalente al flujo de electrones dentro del circuito (corriente), el agua en el
tanque representa la cantidad de carga eléctrica y el Voltaje sería el equivalente a
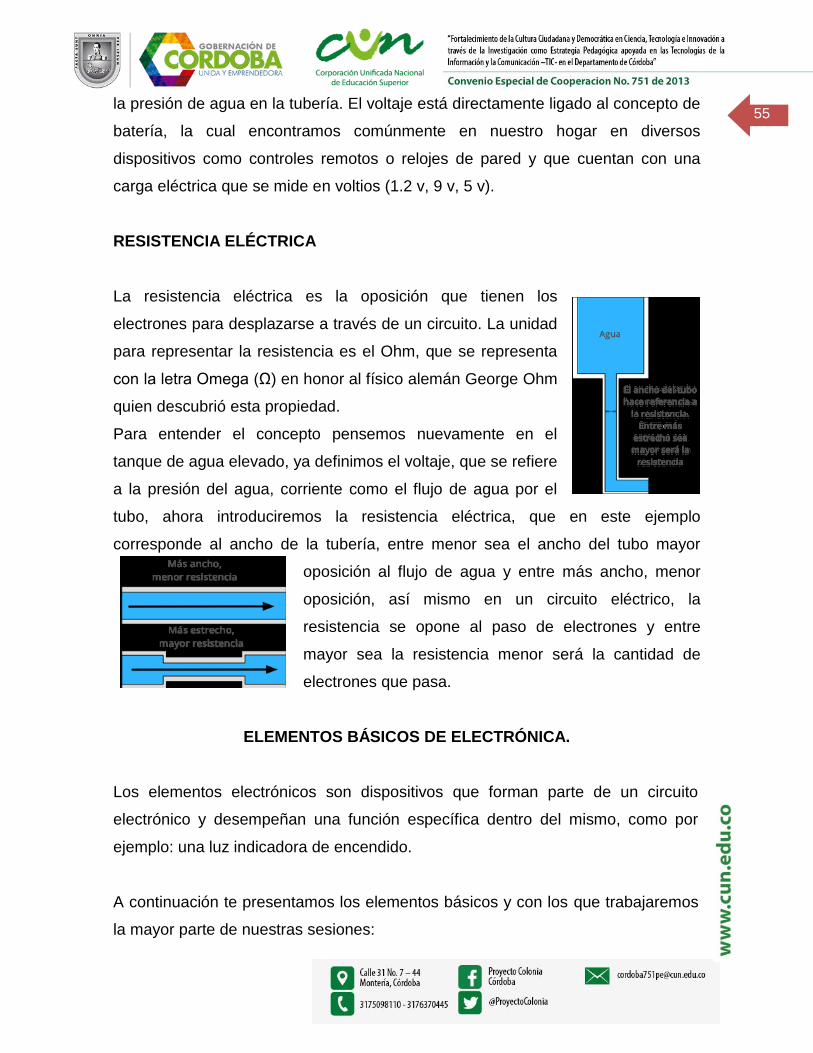
55
la presión de agua en la tubería. El voltaje está directamente ligado al concepto de
batería, la cual encontramos comúnmente en nuestro hogar en diversos
dispositivos como controles remotos o relojes de pared y que cuentan con una
carga eléctrica que se mide en voltios (1.2 v, 9 v, 5 v).
RESISTENCIA ELÉCTRICA
La resistencia eléctrica es la oposición que tienen los
electrones para desplazarse a través de un circuito. La unidad
para representar la resistencia es el Ohm, que se representa
con la letra Omega (Ω) en honor al físico alemán George Ohm
quien descubrió esta propiedad.
Para entender el concepto pensemos nuevamente en el
tanque de agua elevado, ya definimos el voltaje, que se refiere
a la presión del agua, corriente como el flujo de agua por el
tubo, ahora introduciremos la resistencia eléctrica, que en este ejemplo
corresponde al ancho de la tubería, entre menor sea el ancho del tubo mayor
oposición al flujo de agua y entre más ancho, menor
oposición, así mismo en un circuito eléctrico, la
resistencia se opone al paso de electrones y entre
mayor sea la resistencia menor será la cantidad de
electrones que pasa.
ELEMENTOS BÁSICOS DE ELECTRÓNICA.
Los elementos electrónicos son dispositivos que forman parte de un circuito
electrónico y desempeñan una función específica dentro del mismo, como por
ejemplo: una luz indicadora de encendido.
A continuación te presentamos los elementos básicos y con los que trabajaremos
la mayor parte de nuestras sesiones:

56
PROTOBOARD:
Para la realización de la mayor parte de las actividades que realizaremos de aquí
en adelante es necesitamos el uso de una protoboard, esta se considera como
nuestro tablero de experimentos, la cual nos facilitara la interconexión de
elementos electrónicos de forma temporal, ágil y cómoda.
La protoboard presenta un gran número de orificios conectados eléctricamente
entre sí, en forma de patrón, como te la presentamos a continuación.
Vista real protoboard. Vista interconexiones internas protoboard.
Cada uno de las conexiones mostradas corresponde a un nodo o punto de
conexión común.
RESISTENCIA
Es un dispositivo electrónico encargado de reducir la corriente eléctrica que pasa a
través de dos puntos en un circuito, generando de esta manera una resistencia
eléctrica. La cantidad de resistencia eléctrica la indicamos por un valor numérico
precedido de la unidad “ohmios”, por ejemplo 330 Ohmios.
Existen dos tipos de resistencias: Resistencias fijas, las cuales siempre mantienen
un valor resistivo constante, es decir que no cambia con el tiempo y las
Resistencias Variables, que permiten cambiar su valor resistivo en cualquier
momento utilizando algún estimulo externo, como una perilla, la luz, presión, entre
otros.
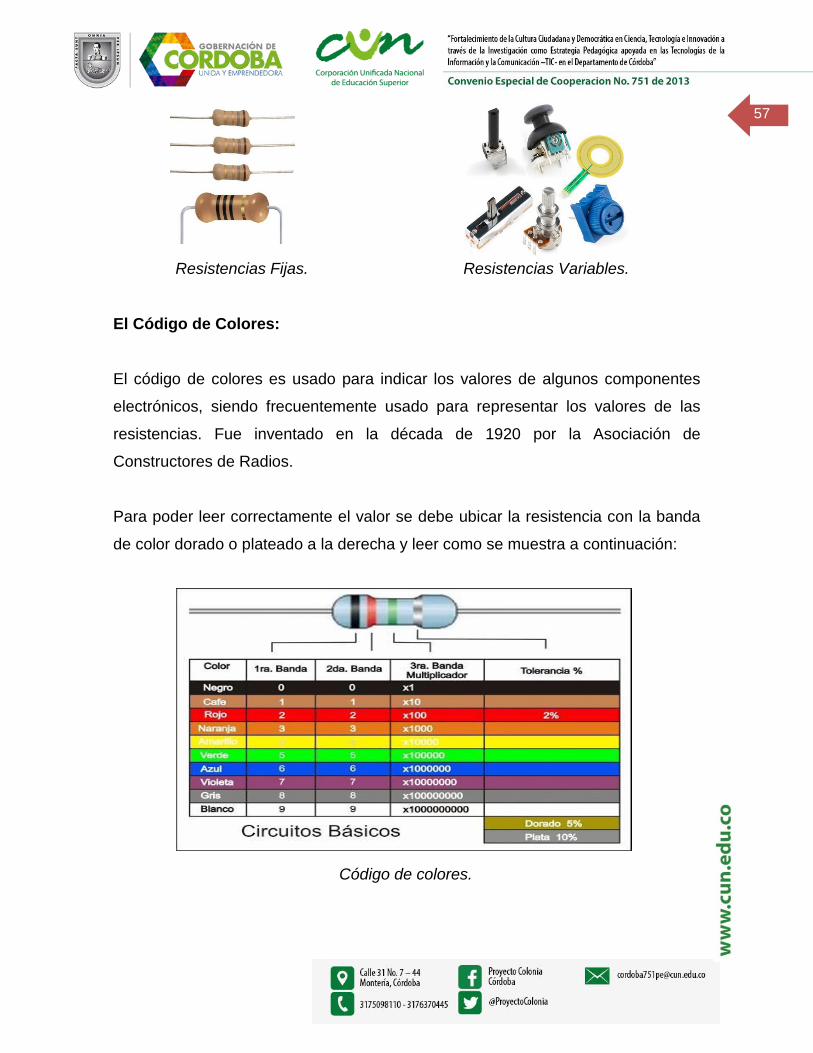
57
Resistencias Fijas. Resistencias Variables.
El Código de Colores:
El código de colores es usado para indicar los valores de algunos componentes
electrónicos, siendo frecuentemente usado para representar los valores de las
resistencias. Fue inventado en la década de 1920 por la Asociación de
Constructores de Radios.
Para poder leer correctamente el valor se debe ubicar la resistencia con la banda
de color dorado o plateado a la derecha y leer como se muestra a continuación:
Código de colores.
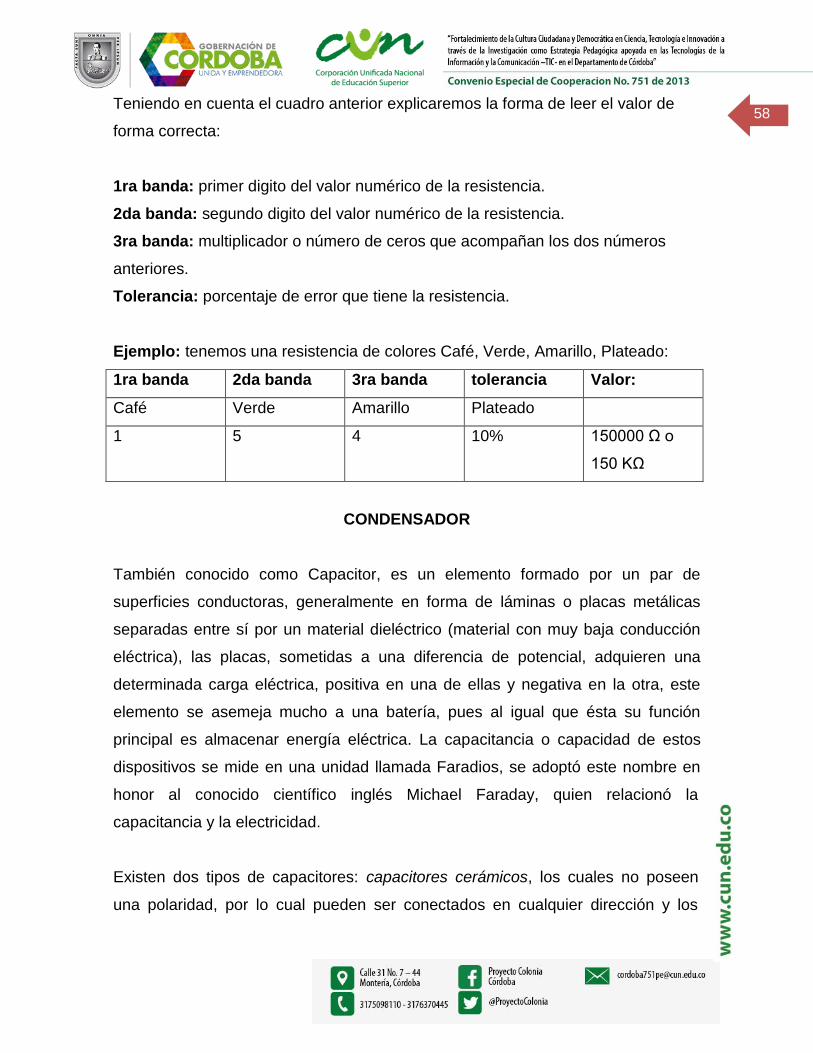
58
Teniendo en cuenta el cuadro anterior explicaremos la forma de leer el valor de
forma correcta:
1ra banda: primer digito del valor numérico de la resistencia.
2da banda: segundo digito del valor numérico de la resistencia.
3ra banda: multiplicador o número de ceros que acompañan los dos números
anteriores.
Tolerancia: porcentaje de error que tiene la resistencia.
Ejemplo: tenemos una resistencia de colores Café, Verde, Amarillo, Plateado:
1ra banda 2da banda 3ra banda tolerancia Valor:
Café Verde Amarillo Plateado
1 5 4 10% 150000 Ω o
150 KΩ
CONDENSADOR
También conocido como Capacitor, es un elemento formado por un par de
superficies conductoras, generalmente en forma de láminas o placas metálicas
separadas entre sí por un material dieléctrico (material con muy baja conducción
eléctrica), las placas, sometidas a una diferencia de potencial, adquieren una
determinada carga eléctrica, positiva en una de ellas y negativa en la otra, este
elemento se asemeja mucho a una batería, pues al igual que ésta su función
principal es almacenar energía eléctrica. La capacitancia o capacidad de estos
dispositivos se mide en una unidad llamada Faradios, se adoptó este nombre en
honor al conocido científico inglés Michael Faraday, quien relacionó la
capacitancia y la electricidad.
Existen dos tipos de capacitores: capacitores cerámicos, los cuales no poseen
una polaridad, por lo cual pueden ser conectados en cualquier dirección y los

59
capacitores polarizados que como su nombre lo indica tienen polaridad y deben
ser conectados de una forma específica.
Capacitores cerámicos. Capacitores polarizados.
LED.
Es un dispositivo emisor de luz que consta de dos terminales eléctricas llamadas
ánodo y cátodo, este elemento tiene polaridad, por lo cual hay que tener cuidado
al momento de conectarlo en un circuito, el ánodo equivale a la terminal positiva y
el cátodo a la negativa, para reconocer fácilmente cada una de sus terminales
procedemos a ubicar un pequeño borde plano presente en su encapsulado, este
borde plano equivale al cátodo.
La popularidad de este dispositivo se ha incrementado debido a sus
características de ahorro energético y bajos precios y está remplazando los
dispositivos que usábamos comúnmente para iluminar nuestros hogares.

60
SUICHE O PULSADOR:
Es un elemento usado para activar señales o enviar pulsos, consta de un botón
que al ser presionado establece contacto entre dos láminas o terminales,
permitiendo el paso de corriente, al dejar de presionar el botón, un resorte hace
recobrar a la lámina su posición inicial, desactivando la señal. Este elemento
funciona como una especie de puente, mientras el botón este sin presionar, el
puente esta abajo y los electrones no pueden desplazarse, al momento que se
presiona el puente baja y los electrones pasan a través de él, generando una
corriente.
REPRESENTACIÓN ESQUEMÁTICA.
Cuando trabajamos con la electrónica necesitamos información de conexiones de
cada elemento y cada elemento tiene una representación esquemática diferente, a
continuación ilustramos los símbolos esquemáticos de los elementos de
electrónica básica:
ELEMENTO SÍMBOLO
ESQUEMÁTICO
Resistencia fija
Resistencia
variable.
Capacitor cerámico.

61
Capacitor
polarizado.
Diodo LED.
Suiches.
Batería.
Actividades prácticas de laboratorio.
Luz LED:
Como mencionamos anteriormente, algunos elementos tienen y se deben
alimentar de una manera específica, como por ejemplo el control remoto de un
televisor, ¿qué pasa si conectas las baterías al revés?... No funciona verdad, pero
se debe tener cuidado, si las baterías tuvieran la suficiente potencia podrían
dañarlo, por este motivo es muy importante tener cuidado al momento de conectar
elementos electrónicos dentro de un circuito. Para practicar realicemos los
siguientes montajes.
¿Qué necesitamos?
rotoboard.

62
Montaje 1:
Montaje 1: Esquemático.
Montaje 1: Vista real.
Montaje 2: encendido y apagado
Ahora agreguemos un Suiches en serie entre la resistencia y el led, como se
muestra a continuación, veras que al presionar el suiche se enciende él led y al
soltarlo este se apaga:
Montaje 2: Esquemático.

63
Montaje 2: Vista real
Sesión 2: Introducción a Arduino.
¿Qué es Arduino y quién lo creo?
Arduino es una plataforma electrónica que se utiliza en un sinfín de aplicaciones;
gracias a su facilidad para ser programado pueden realizarse desde experiencias
artísticas hasta sistemas de medición para proyectos de investigación. El motivo
por el cuál Arduino es una plataforma con tanto éxito, es porque gracias a su
lenguaje se simplificó la forma de programar y no es necesario tener vastos
conocimientos en microcontroladores para utilizarlo, en otras palabras, es muy
sencillo de manejar por cualquier persona que esté interesada en desarrollar
diferentes proyectos, que van desde encender una pequeña luz, hasta controlar un
robot.
El programa de Arduino se debe en gran medida al trabajo realizado por el
Colombiano Hernando Barragán, quien siendo estudiante de Maestría de Diseño
Interactivo en el instituto Ivrea, Italia, desarrolló como tesis de grado la tarjeta de
desarrollo Wiring y el lenguaje de programación para esta tarjeta en el año 2005;
este trabajo es reconocido como uno de los aportes principales en el origen del
proyecto Arduino y es agradecido oficialmente en la página de Arduino
http://arduino.cc/es/Main/Credits#.U1RaYfl5OSo.

64
¿Cuál crees que es la diferencia de los pines de entrada y los de salida?
La diferencia entre estos pines es el sentido de la información, mientras que los
pines de entrada reciben información, los pines de salida envían órdenes. En la
actividad de hoy aprenderás a decirle al Arduino que use sus pines de salida para
ciertas tareas como encender y apagar Led. Pero antes tienes que conocer la
herramienta de trabajo.
Arduino IDE
El IDE o “Entorno de Desarrollo Integrado” es el software con el cual escribiremos
las instrucciones que queremos que realice la placa Arduino, este IDE se puede
descargar directamente de la página de Arduino:
https://www.arduino.cc/en/Main/Software. Una vez descargado e instalado, se
abrirá una ventana como la que se ve a continuación:
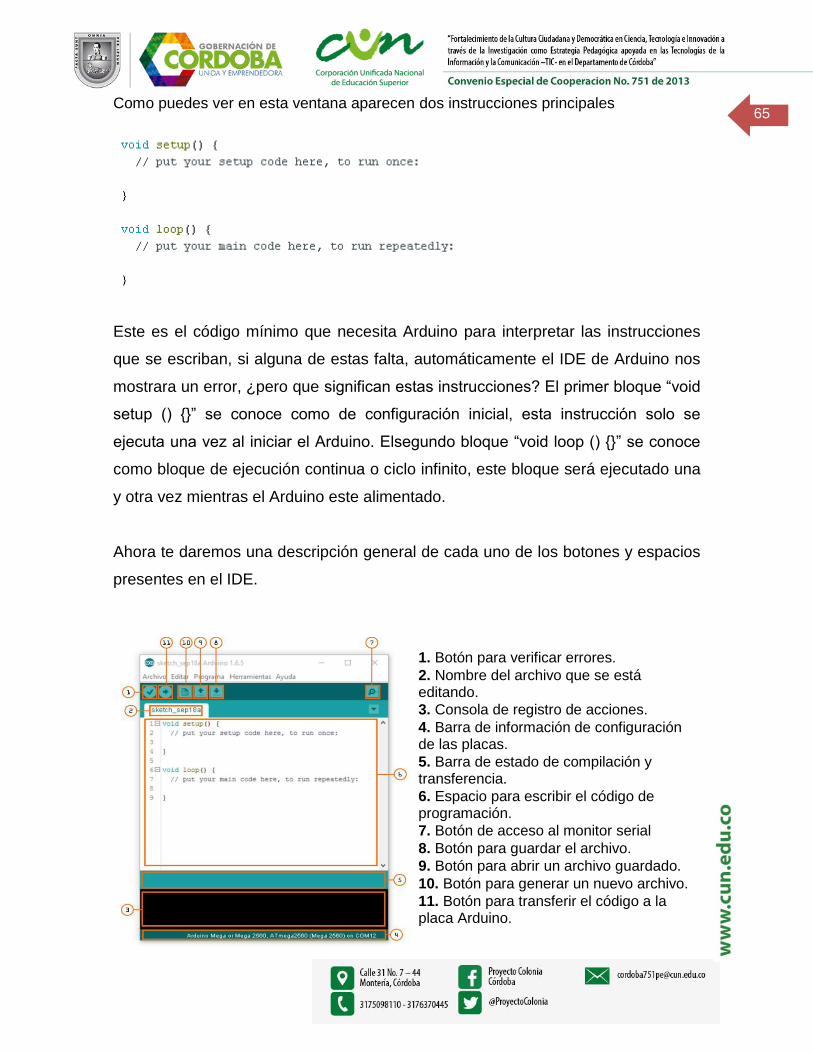
65
Como puedes ver en esta ventana aparecen dos instrucciones principales
Este es el código mínimo que necesita Arduino para interpretar las instrucciones
que se escriban, si alguna de estas falta, automáticamente el IDE de Arduino nos
mostrara un error, ¿pero que significan estas instrucciones? El primer bloque “void
setup () {}” se conoce como de configuración inicial, esta instrucción solo se
ejecuta una vez al iniciar el Arduino. Elsegundo bloque “void loop () {}” se conoce
como bloque de ejecución continua o ciclo infinito, este bloque será ejecutado una
y otra vez mientras el Arduino este alimentado.
Ahora te daremos una descripción general de cada uno de los botones y espacios
presentes en el IDE.
1. Botón para verificar errores.
2. Nombre del archivo que se está editando.
3. Consola de registro de acciones.
4. Barra de información de configuración de las placas.
5. Barra de estado de compilación y transferencia.
6. Espacio para escribir el código de programación.
7. Botón de acceso al monitor serial
8. Botón para guardar el archivo.
9. Botón para abrir un archivo guardado.
10. Botón para generar un nuevo archivo.
11. Botón para transferir el código a la placa Arduino.
66
Instrucciones Básicas: En la siguiente tabla te mostramos algunas de las instrucciones más utilizadas en
la programación de Arduino y las cuales trabajaremos continuamente durante toda
nuestra preparación, si quieres mayor información acerca de estas y otras
instrucciones puedes ir a la página web: https://www.arduino.cc/en/Reference/
HomePage.
Instrucción Descripción pinMode(nPin,Mod) Elemplo: pinMode(13, OUTPUT)
Instrucción para configurar un pin como estrada o salida: nPin: indica el numero un pin que queramos configurar. Mod: indica el modo de Trabajo, si el pin es de entrada escribimos INPUT y si el pin es de Salida escribimos OUTPUT. Configuración del pin numero 13 como salida.
digitalWrite(nPin,Valor)
Ejemplo: digitalWreite(2,HIGH)
Escribe un valor digital en el pin seleccionado. nPin: indica el número un pin que se utilizara. Valor: valor que se escribirá en el pin seleccionado, HIGH (1) o LOW (0). En este ejemplo se le da un valor de HIGH al pin 2.
analogWrite(nPin,Valor); Ejemplo: analogWrite(3,150);
Escribe un valor análogo en el pin seleccionado, se utiliza en los pines PWM(indicados con un ~) nPin: Indica el número un pin que se utilizara. Valor: Valor entre 0 y 255 que se escribirá en el pin seleccionado. En este ejemplo se da un valor de 15º al pin 3.
digitalRead(nPin);
Ejemplo: digitalRead(8);
Lee un valor digital en el pin indicado por nPin. Esta instrucción nos dice si el pin se encuentra en HIGH o en LOW. En este ejemplo se lee el valor del pin 8.
analogRead(A0); Ejemplo: analogRead(A0);
Lee un valor análogo en el pin indicado por nPin. Esta instrucción entrega un valor entre 0 y 1023 de acuerdo al voltaje del pin. En este ejemplo se lee el valor del pin A0
delay(milisecs); Ejemplo: delay(1000);
Es un retardo que detiene la ejecución del programa por el número de milisegundos indicados por milisecs. En este ejemplo se hace un retardo de 1 segundo (1000 milisegundos).
Serial.begin(9600); Configura la velocidad de comunicación serial del Arduino con otros dispositivos como el Computador. El valor de 9600 es la velocidad de la comunicación en baudios.

67
Cargando nuestro primer código:
Arduino cuenta con gran cantidad de ejemplos que se descargan con el IDE,
además en internet se encuentran innumerables aportes presentados por la
comunidad de todo el mundo.
Para poder cargar nuestro primer código, lo primero que debemos hacer es
conectar nuestra placa de Arduino al computador por medio de un cable USB, y
esperamos a que el controlador se instale. Después de esto nos dirigimos al IDE y
abrimos el ejemplo llamado “Blink” de la siguiente manera:
Al hacer esto se abrirá una nueva ventana, el código presente allí hará que el led
conectado en el pin 13 de la placa Arduino encienda durante un segundo y apague
durante un segundo, para cargar este código a la placa y poder probar que
realmente el código funciona, realizamos los siguientes pasos:
Primero verificamos que la placa que vamos a programar coincida con la placa
que tenemos físicamente:

68
Después seleccionamos el puerto en el cual queda conectado el Arduino, estos se
caracterizan porque comienzan con “COM” seguido de un número (en este caso el 3,
pero este pueda variar), además dentro de paréntesis “()” se encuentra el nombre de
la placa conectada físicamente:
Al configurar correctamente lo descrito anteriormente oprimimos y esperamos
hasta que en la barra de estado aparezca el mensaje “Subido”. Con esto hecho,
un pequeño bombillito (led) ubicado en la placa debe empezar a parpadear.
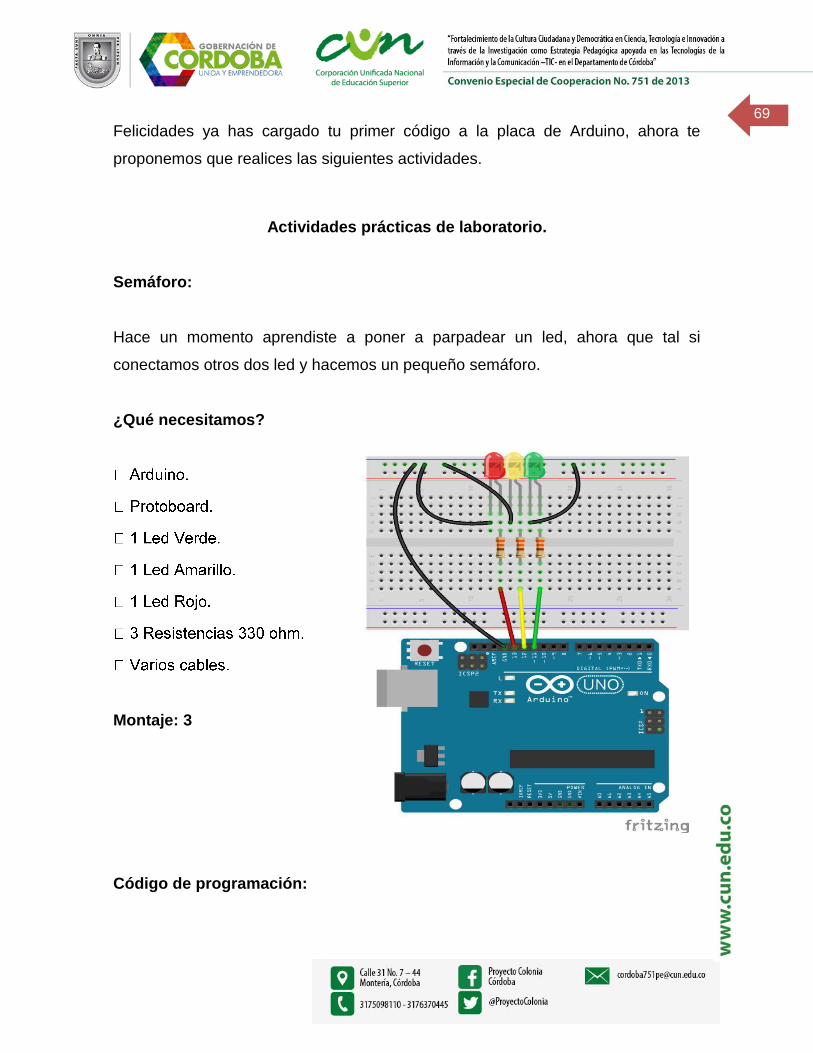
69
Felicidades ya has cargado tu primer código a la placa de Arduino, ahora te
proponemos que realices las siguientes actividades.
Actividades prácticas de laboratorio.
Semáforo:
Hace un momento aprendiste a poner a parpadear un led, ahora que tal si
conectamos otros dos led y hacemos un pequeño semáforo.
¿Qué necesitamos?
Montaje: 3
Código de programación:
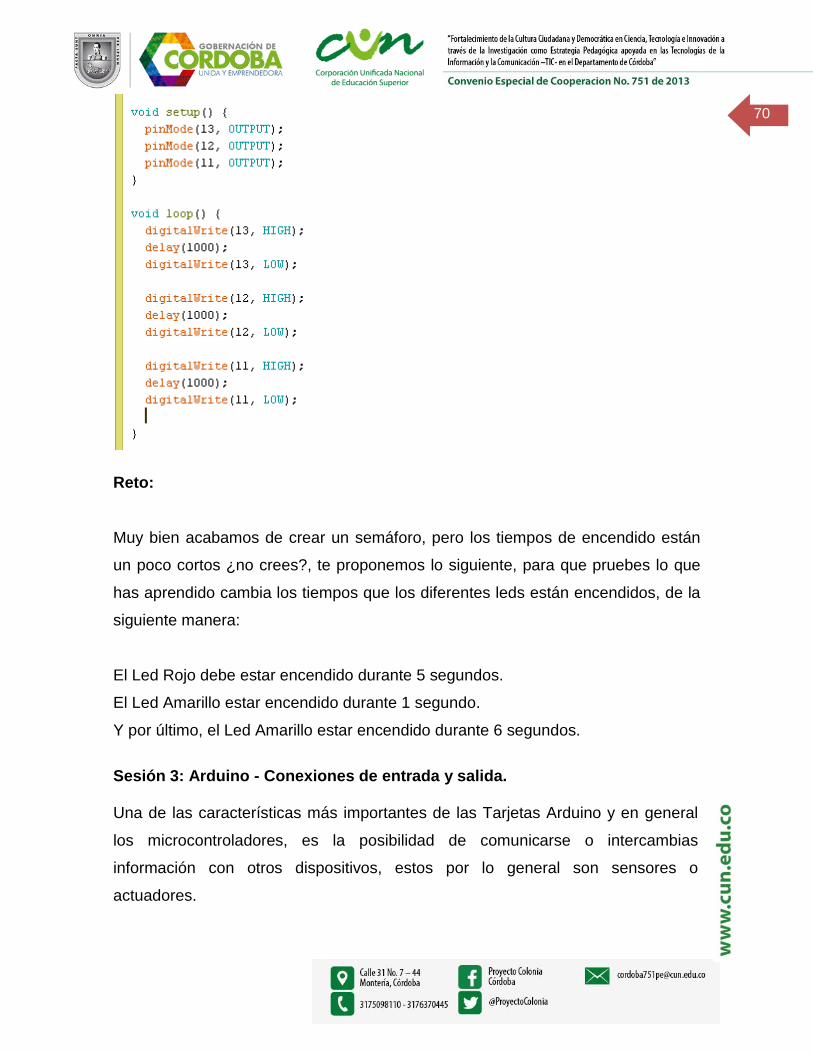
70
Reto:
Muy bien acabamos de crear un semáforo, pero los tiempos de encendido están
un poco cortos ¿no crees?, te proponemos lo siguiente, para que pruebes lo que
has aprendido cambia los tiempos que los diferentes leds están encendidos, de la
siguiente manera:
El Led Rojo debe estar encendido durante 5 segundos.
El Led Amarillo estar encendido durante 1 segundo.
Y por último, el Led Amarillo estar encendido durante 6 segundos.
Sesión 3: Arduino - Conexiones de entrada y salida. Una de las características más importantes de las Tarjetas Arduino y en general
los microcontroladores, es la posibilidad de comunicarse o intercambias
información con otros dispositivos, estos por lo general son sensores o
actuadores.

71
Pines de entrada y pines de salida.
La diferencia entre estos pines es el sentido de la información, mientras que los
pines de entrada del Arduino permiten recibir información de diferentes elementos
como los sensores, para después interpretarla y tomar decisiones, los pines de
salida permiten controlar o enviar información a diferentes elementos externos
como los actuadores, permitiendo desplegar información o realizar diferentes
tareas.
Hay que tener en cuenta que la tarjeta cuenta con diferentes pines de entrada y
salida y a continuación los explicamos.
Señales Análogas y Digitales. Las señales digitales son aquellas que solo presentan 2 estados posibles
encendido (1, HIGH, 5v) o apagado (0, LOW, 0v), por ejemplo un bombillo, esta
encendido o apagado, por otro lado las señales análogas pueden tener diferentes
valores entre un rango especifico, por ejemplo cualquier valor entre o y 255.
72
Los pines Análogos y digitales pueden ser utilizados como entrada o salida, pero
específicamente de la siguiente forma:
PINES ANÁLOGOS DE ENTRADA:
Podemos reconocer estos puertos en la tarjeta porque están numerados como A0,
A1, A2, A3, A4, A5. Estos pines puede tomar valores entre 0 y 1023 que son
proporcionales al voltaje del sensor entre 0 voltios y 5 voltios.
El voltaje y el valor del pin se relacionan con la siguiente fórmula:
= (1023 )
5
Por ejemplo: si un sensor entrega un valor de 2.5 voltios se tendría un valor de
512 en el pin escogido. Te proponemos completes la siguiente tabla para que
practiques como funciona:
Valor del pin análogo. Valor en voltaje del sensor
1 voltios
3.5 voltios
255
PINES ANÁLOGOS DE SALIDA (PWM):
Arduino cuenta con diferentes salidas análogas que están compartidos con los
pines digitales, se pueden reconocer porque están marcados con el símbolo ~
antes del número del pin; en la placa con la que nosotros trabajamos el “Arduino
uno” los pines análogos de salida son el: 3, 5, 6, 9, 10, 11.
Los pines análogos de salida se usan cuando se desea activar elementes con
varios niveles de intensidad como por ejemplo: la velocidad de un motor o la

73
intensidad de luz de un LED. Estos pines pueden entregar voltajes entre 0 voltios y
5 voltios, representados con valores entre 0 y 255, donde 0 (cero) es la menor
intensidad y 255 la mayor intensidad. El voltaje de salida en el pin se calcula con
la siguiente formula:
=(5 )
255
Por ejemplo si escribo el valor de 127 el voltaje de salida del pin seleccionado
estará en 2,5 voltios.
PINES DIGITALES DE ENTRADA O SALIDA:
El Arduino uno cuenta con 14 pines digitales marcada desde 0 hasta 13, estos
pines funcionan como entrada o salida, y tienen dos estados de trabajo, valores
“HIGH” ó “1” de Encendido y valores “LOW” o “0” de Apagado.
Los pines digitales sirven para leer señales de ON-OFF y para activar elementos
que solo tengan estados de Encendido o Apagado, no sirven para elementos con
estados intermedios como por ejemplo la velocidad de un motor o para leer el
voltaje de un sensor
Decisiones en Arduino.
A diario estamos tomando decisiones con respecto a las actividades que vamos a
realizar, estas decisiones están condicionadas por alguno o diferentes factores,
por ejemplo: dependiendo del clima decidimos si llevar una chaqueta o una
camisa fresca, como se muestra:

74
Dentro de un algoritmo este tipo de decisiones las llamamos condicionales, vemos
que en estas primero tenemos una pregunta (SI), de modo que si obtenemos una
respuesta verdadera realizamos alguna acción, por el contrario, si la respuesta es
falsa (sino), realizamos una acción diferente.
En el lenguaje de programación las condiciones se escriben de la siguiente forma:
Veámoslo en un ejemplo: debemos realizar un código de programación para saber si
una persona es mayor de edad:
Veámoslo en un ejemplo: debemos realizar un código de programación para saber
si una persona es mayor de edad:

75
Actividades prácticas de laboratorio. Sensor de temperatura: Vamos a realizar un sensor de temperatura y para eso utilizaremos un nuevo
elemento de nuestro kit, se trata del sensor de temperatura llamado LM35, este es
un sensor digital y te lo mostramos en la siguiente imagen:
¿Qué necesitamos?
ensor de temperatura LM35.
Montaje 4: Vamos a captar la temperatura del ambiente, para esto realizaremos el siguiente
montaje y utilizaremos el monitor serial del Arduino.
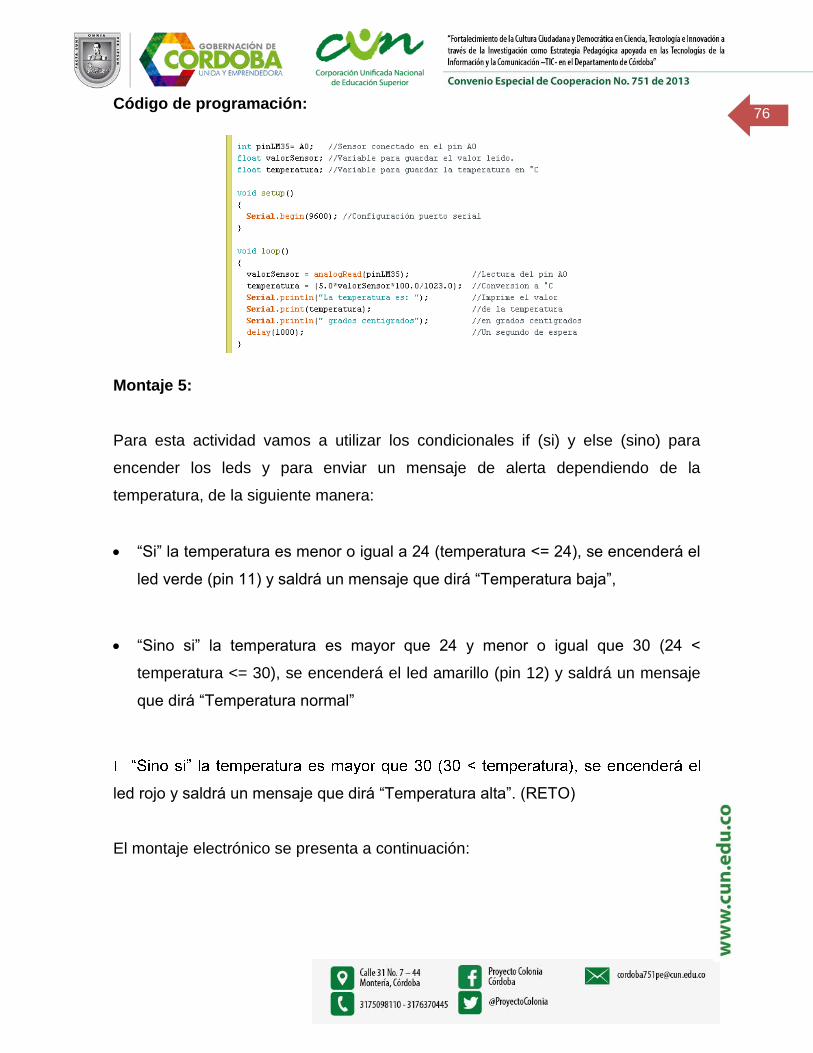
76
Código de programación:
Montaje 5:
Para esta actividad vamos a utilizar los condicionales if (si) y else (sino) para
encender los leds y para enviar un mensaje de alerta dependiendo de la
temperatura, de la siguiente manera:
“Si” la temperatura es menor o igual a 24 (temperatura <= 24), se encenderá el
led verde (pin 11) y saldrá un mensaje que dirá “Temperatura baja”,
“Sino si” la temperatura es mayor que 24 y menor o igual que 30 (24 <
temperatura <= 30), se encenderá el led amarillo (pin 12) y saldrá un mensaje
que dirá “Temperatura normal”
led rojo y saldrá un mensaje que dirá “Temperatura alta”. (RETO)
El montaje electrónico se presenta a continuación:

77
Código de programación:
Reto:

78
Como puedes ver, hay un espacio en el código de programación que pide que
agregues tu código, te proponemos que en ese espacio borres el comentario y
termines de agregar el código que falta para terminar la actividad propuesta,
recuerda que en cualquier momento puedes apoyarte y pedirle consejos al
formador.
Sesión 4: Variando la intensidad. ¿Qué es PWM? PWM (Pulse-width modulation) o señal de modulación por ancho de pulso, es una
técnica para transferir información por medio de una señal cuadrada, donde la
frecuencia es constante y se cambia el tiempo que dura la señal en alto y bajo.
No todos los pines de Arduino pueden generar PWM, solo los que los que están
diseñados para tal fin (3, 5, 6, 9, 10 y 11), y se pueden identificar porque son
pines digitales a los que se les antepone el símbolo ~ . Para usar el PWM con el
Arduino debemos utilizar la función analogWrite (pin, valor) donde “pin” es el pin
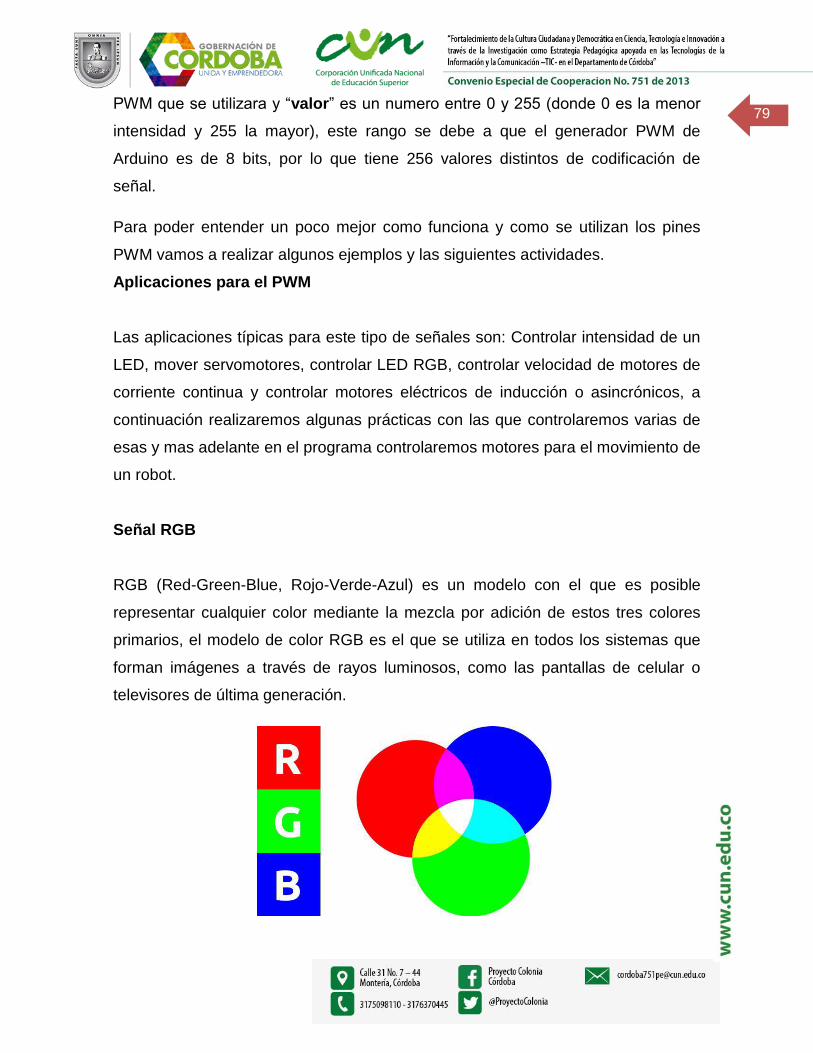
79
PWM que se utilizara y “valor” es un numero entre 0 y 255 (donde 0 es la menor
intensidad y 255 la mayor), este rango se debe a que el generador PWM de
Arduino es de 8 bits, por lo que tiene 256 valores distintos de codificación de
señal.
Para poder entender un poco mejor como funciona y como se utilizan los pines
PWM vamos a realizar algunos ejemplos y las siguientes actividades.
Aplicaciones para el PWM
Las aplicaciones típicas para este tipo de señales son: Controlar intensidad de un
LED, mover servomotores, controlar LED RGB, controlar velocidad de motores de
corriente continua y controlar motores eléctricos de inducción o asincrónicos, a
continuación realizaremos algunas prácticas con las que controlaremos varias de
esas y mas adelante en el programa controlaremos motores para el movimiento de
un robot.
Señal RGB
RGB (Red-Green-Blue, Rojo-Verde-Azul) es un modelo con el que es posible
representar cualquier color mediante la mezcla por adición de estos tres colores
primarios, el modelo de color RGB es el que se utiliza en todos los sistemas que
forman imágenes a través de rayos luminosos, como las pantallas de celular o
televisores de última generación.
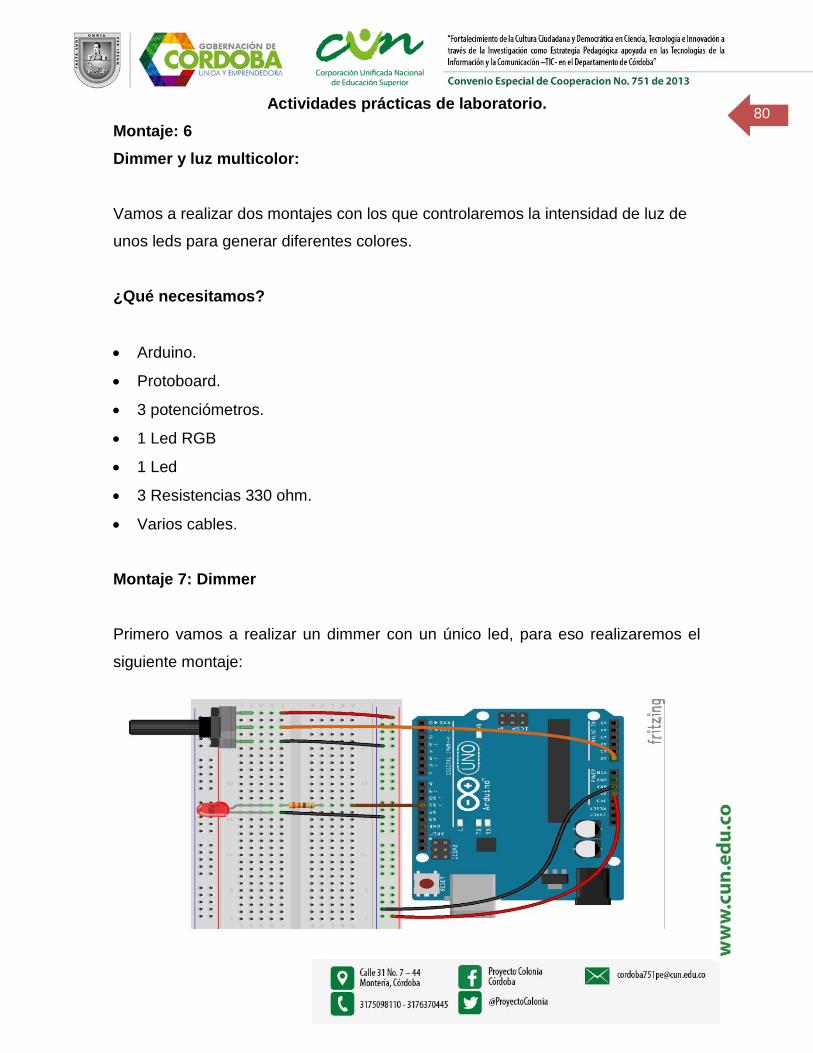
80
Actividades prácticas de laboratorio.
Montaje: 6
Dimmer y luz multicolor:
Vamos a realizar dos montajes con los que controlaremos la intensidad de luz de
unos leds para generar diferentes colores.
¿Qué necesitamos?
Arduino.
Protoboard.
3 potenciómetros.
1 Led RGB
1 Led
3 Resistencias 330 ohm.
Varios cables.
Montaje 7: Dimmer
Primero vamos a realizar un dimmer con un único led, para eso realizaremos el
siguiente montaje:

81
Código de programación:
Montaje 8: Luz multicolor Para la realización de esta práctica utilizaremos el led RGB que se muestra a
continuación:
Con este elemento podremos crear diferentes colores con la combinación de los
tres colores básicos, Rojo, Verde y Azul, por medio del siguiente montaje:
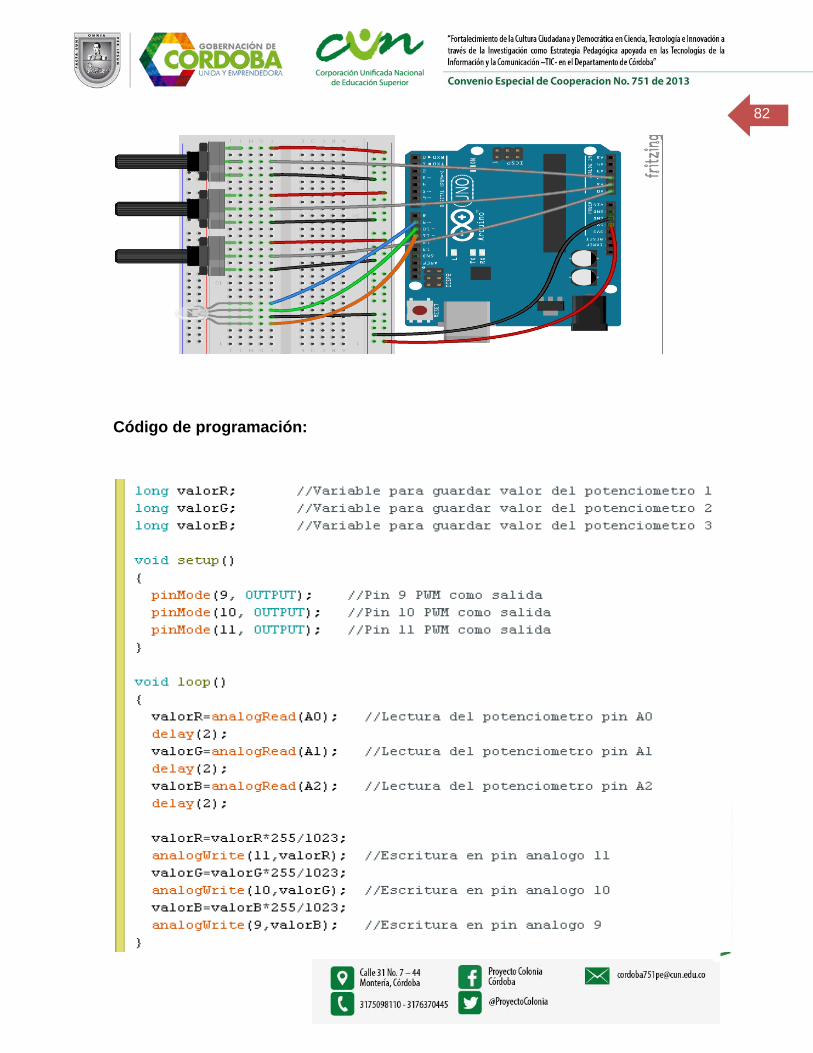
82
Código de programación:
83
Sesión 5: Sonidos con Arduino. Para esta sesión trabajaremos una actividad con la que reproduciremos algunos sonidos, pero sabes ¿qué es un sonido y como es transmite? ¿Qué es el sonido? El sonido se considera como las vibraciones que producen los cuerpos al ser
golpeados y que se transmiten por un medio elástico, donde estas se propagan en
forma de ondas y al llegar a nuestros oídos producen una sensación sonora; hay
que aclarar que el sonido se considera como la propagación de ondas mecánicas
y estas pueden ser audibles o no, lo que quiere decir que aunque muchas
vibraciones llegan a nuestros oídos, no las percibimos todas como sonidos
audibles.
El sonido necesita de un medio elástico para pueda ser transmitido, por ejemplo
en el aire se transmite fácilmente el sonido, pero se transmite mejor a través de
los sólidos y los líquidos, como en el vacío no hay ningún medio elástico, el sonido
no puede ser transmitido, así que cuando veas películas del espacio en las que
suena el cohete de una nave, recuerda que ese efecto solo esta para dar más
realismo a las imágenes, porque realmente así no es como ocurre.

84
El sonido y la frecuencia.
La frecuencia del sonido hace referencia a la cantidad de veces que vibra el
transmisor de la onda en un segundo, La unidad de medida de la frecuencia son
los Hertzios (Hz). Como mencionamos anteriormente no todas las vibraciones son
captadas por nuestros oídos como un sonido, para que el ser humano pueda oír
un determinado sonido, su frecuencia debe estar comprendida aproximadamente
entre los 20 Hz y los 20.000 Hz (o 20 kHz).
Las vibraciones del aire superiores a los 20.000 Hz se denominan ultrasonidos.
Los ultrasonidos son perceptibles por algunas especies animales como los
murciélagos o los delfines, también son utilizados con fines médicos en distintas
terapias curativas, tratamientos o sistemas de diagnóstico. Los infrasonidos, en
cambio, son aquellos cuya frecuencia sonora está por debajo de los 20 Hz. Este
tipo de frecuencia es audible para especies como elefantes, tigres o ballenas.
Podemos diferenciar los sonidos dividiéndolos en dos grupos, Graves y Agudos.
La frecuencia de los tonos agudos oscila entre los 2.000 Hz y los 4.000 Hz,
mientras que los graves van desde los 125 a los 250 Hz. Normalmente las
mujeres tiene una fina y chillona (Voz Aguda) y lo hombres la voz más gruesa y
ronca (Voz Grave).
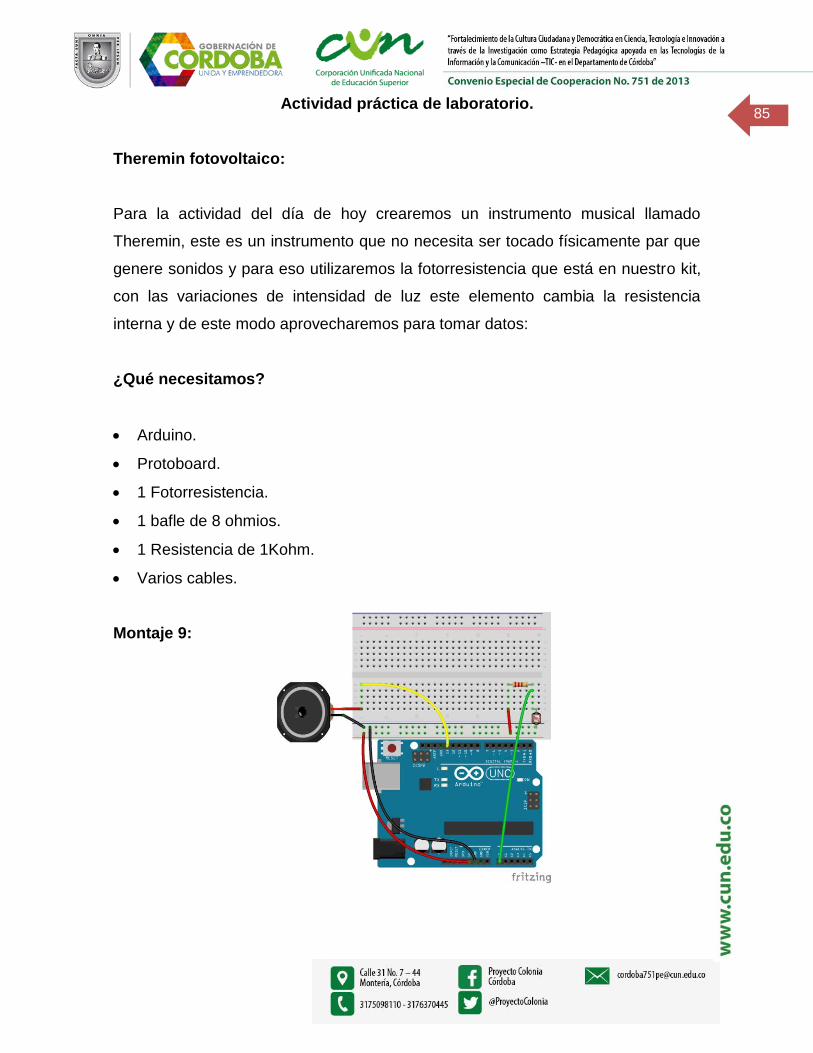
85
Actividad práctica de laboratorio.
Theremin fotovoltaico:
Para la actividad del día de hoy crearemos un instrumento musical llamado
Theremin, este es un instrumento que no necesita ser tocado físicamente par que
genere sonidos y para eso utilizaremos la fotorresistencia que está en nuestro kit,
con las variaciones de intensidad de luz este elemento cambia la resistencia
interna y de este modo aprovecharemos para tomar datos:
¿Qué necesitamos?
Arduino.
Protoboard.
1 Fotorresistencia.
1 bafle de 8 ohmios.
1 Resistencia de 1Kohm.
Varios cables.
Montaje 9:

86
9.2. GUÍA DE PROGRAMACIÓN CON ARDUINO
OBJETIVO GEMNERAL.
Es esta guía los estudiantes ensamblaran mecánica y electrónicamente el robot, lo
programarán de acuerdo las diferentes instrucciones de los elementos que lo
conforman con la tarjeta Arduino y le harán prueba de funcionamiento al finalizar la
práctica, afianzado las competencias de matemática, física y tecnología e
informática.
Sesión 1: Ensamble del robot y prueba de funcionamiento.
¿Sabes que se necesita para armar un robot?
Los robots han sido desde siempre objeto de estudio y experimentación, por
definición un robot es una máquina que está diseñada para simular o cumplir una
tarea específica de manera automática o controlada, sus movimientos y
funcionamiento poseen cierta independencia, pero deben ser siempre
programados o controlados por un ser humano.
Para poder hablar de un robot debemos siempre tener en cuenta 3 elementos
específicos, Mecánica, Electrónica y Programación, todos estos cumplen una
función importante dentro de la robótica y pueden ser descritas de la siguiente
manera.
MECÁNICA:
La parte mecánica de un robot está compuesta por todo el sistema estructural del
mismo, es aquel que se encarga de dar soporte y rigidez al robot, manteniendo la
forma y sostenimiento de todas las partes externas, además dentro de la

87
mecánica se encuentran los actuadores, que se encargan de transmitir el
movimiento hacia el exterior, como los son el giro, desplazamiento, etc.
ELECTRÓNICA: Dentro de la parte electrónica se encuentran todos los elementos que se encargan
de transmitir la información y tomar datos del medio, los principales componentes
dentro de este campo son los sensores, estos se encargan de recoger la
información del entorno y enviarla sistema de control para su procesamiento.
PROGRAMACIÓN: Para poder realizar la programación de un robot se necesita una unidad de
procesamiento, la cual se encarga de analizar la información enviada por los
sensores, tomar decisiones y dar órdenes a los sistemas actuadores. La
programación está definida por condiciones de comparación y existen diferentes
lenguajes con los cuales se puede dar la lógica a la unidad de procesamiento.

88
Comparemos un robot con el cuerpo humano.
Te parecerá extraña esta comparación, pero aunque no lo creas vas a entender
muy claramente cada uno de los sistemas del robot, debate con tus compañeras y
trata de comparar cada uno de los sistemas descritos anteriormente con las partes
de tu cuerpo.
¿Qué lograste definir? ¿Están todas de acuerdo con los resultados? Debatan
ahora entre todos los estudiantes y el docente e intercámbienlas ideas que se
presentaron.
¿Cómo se desplazan los robots? Existen diferentes sistemas de desplazamiento para los robots, y según la forma
pueden tener diferentes clasificaciones:
89
Robots con patas o zoomórficos: se asemejan a la morfología de los animales
terrestres con patas como los mamíferos o arañas.
Robots humanoides o androides: Los robots humanoides asemejan la
morfología humana, dado su grado de complejidad en el control no son muy
eficientes en cuanto a su movilidad.
Robots aéreos: Son robots que se desplazan por el aire, estos pueden der
utilizados de forma no tripulada o por control remoto.
Robots orugas: Los robots orugas son muy adecuados para moverse por
terrenos irregulares con una buena eficiencia, aunque menor que los robots con
ruedas tradicionales.
Robots con ruedas: Son el tipo de robot móvil más común, las ruedas
proporcionan a este tipo de robot una movilidad con una alta eficiencia, pero
suelen estar restringidos a entornos cuyas superficies sean planas o poco
irregulares.
Para continuar nuestro proceso formativo debemos realizar el ensamble del robot;
desde esta sesión y hasta finalizar el proyecto lo utilizaremos para las diferentes
prácticas que tenemos propuestas, por esto es importante que todo el ensamble
mecánico y las conexiones electrónicas estés bien realizadas.
Ensamble mecánico.
Dentro del kit robótico se encuentra la cartilla de ensamble, la cual tiene el paso a
paso del armado y nos ira guiando durante el proceso de ensamble, debemos
seguirla en orden y no saltarnos ningún paso, cuando hallamos terminado debe
quedar el robot como se ve en la siguiente imagen.

90
Conexiones eléctricas. Con nuestro robot armado por completo podemos continuar con las conexiones
eléctricas. Lo motores DC son componentes que no tienen polaridad, se pueden
conectar de cualquier forma a una fuente de energía, lo único que cambia al
conectarlo de una u otra forma es la dirección de giro.
Este comportamiento nos sirve para que nuestro robot pueda moverse hacia
adelante, atrás o para que gire, dependiendo de la dirección de giro que le
configuremos a los dos motores, para esto utilizaremos un Puente H, ¿Pero que

91
es un puente H? un puente H es un elemento que nos sirve para controlar la
dirección y velocidad de un motor DC.
Shield puente H l293d Para controlar un motor DC con un puente h necesitamos utilizar 2 pines digitales
del Arduino, uno que controle la dirección de giro (adelante o atrás) y otro que
controle la velocidad (usando los pines PWM, concepto que vimos hace algunas
sesiones), en este caso el “puente h l293” está fabricado para controlar 2 motores
y esta pre-configurado para utilizar los siguientes pines del Arduino (pin
4=dirección motor 1, Pin 5= velocidad motor 1, pin 7=dirección motor 2, Pin 6=
velocidad motor 2). Conectemos nuestros motores al puente h y realicemos
pruebas de funcionamiento.

92
Cuando tengamos la conexión anterior realizada debemos comprobar que nuestro
robot si se mueva hacia adelante, para eso debemos copiar el siguiente código de
programación en el en IDE de Arduino y comprobar el movimiento del robot.
IMPORTANTE: el siguiente código debemos copiarlo completo y guárdalo en
algún lugar donde lo podamos ubicar fácilmente, este será la base de trabajo que
utilizaremos de aquí en adelante, la recomendación es ponerle un nombre que sea
fácil de recordar y que de alguna información de lo que contiene adentro, por
ejemplo “Funciones de movimiento”.

93
Muy bien, cuando este el código copiado por completo y se haya cargado al robot
podemos proceder a conectar nuestra batería y poner en marcha el robot. Si al
conectar el robot este empieza a girar o a andar hacia atrás, debemos corregir la
conexión de los motores, debemos fijarnos cuál es el motor que presenta el
problema e intercambiar los cables de la conexión del puente H, por ejemplo: si el
motor derecho gira hacia adelante, pero el izquierdo gira hacia atrás, debemos
intercambiar los cables del motor izquierdo, de esta forma el robot quedara con la
función anterior avanzando hacia adelante.
Muy bien, tenemos nuestro robot armado por completo y hemos conectado los
motores para su movimiento, los motores no se tendrán que desconectar en
ningún momento y como están en este momento se utilizaran hasta finalizar el
proyecto.

94
Actividad práctica de laboratorio.
Perfecto, para la realización de las siguientes actividades utilizaremos las
funciones de movimiento y giro, estas funciones las creamos y copiamos
anteriormente en un archivo de Arduino, sobre este código vamos a trabajar y
empezaremos a probar que las funciones trabajen de forma correcta, para esto
vamos a invocarlas dentro del “void loop”
Las funciones tienen la siguiente estructura:
Direccion_de_movimiento (PWM_M_Izq , PWM_M_Der , Tiempo);
Direccion_de_movimiento: opción de movimiento, tenemos 4 Adelante, Atrás,
Derecha o Izquierda.
PWM_M_Izq: Velocidad del motor Izquierdo, valor entre 0 y 255, donde 255 es la
máxima velocidad.
PWM_M_Der: Velocidad del motor Derecho, valor entre 0 y 255, donde 255 es la
máxima velocidad.
Tiempo: Tiempo en milisegundo por el cual se ejecutara la instrucción antes dada
(1000 milisegundos = 1 segundo).
Ejemplo: Adelante (120, 120, 2000);
Derecha (150, 120, 1500);
La función “Parar” es la única que tiene una estructura diferente, solo se le debe
indicar el tiempo por el cual estará sin movimiento el robot.
Ejemplo: Parar (500);
Es importante que las funciones estén escritas tal cual como están indicadas, el
programa de Arduino diferencia las mayúsculas de las minúsculas, por tal motivo
no es lo mismo decir

95
Que decir en nuestro programa esta ultima instrucción el Arduino no la reconocerá. Copiemos el siguiente código, carguémoslo en el Arduino y probemos el
funcionamiento, recuerda únicamente vamos a cambiar lo que esta dentro del void
loop.
El código anterior hace que el robot vaya hacia adelante durante 1 segundo, hacia
atrás durante 1 segundo, gire a la derecha un segundo, a la izquierda un segundo
y pare durante un segundo, este programa por estar dentro del “void loop se repite
infinitas veces, mientras el Arduino este alimentado.
Perfecto ya hemos aprendido a utilizar las funciones de movimiento, ahora te
proponemos que realices los siguientes retos, recuerda que solo debes cambiar lo
que está dentro del “void loop”:
1. Que el robot realice la figura de un cuadrado en el piso.
2. Que el robot ande formando un círculo.

96
3. Que el robot realice la figura de un ocho (8)
4. Prueba realizando diferentes figuras y compártela con tus compañeros,
recuerda que la práctica hace al maestro.
97
10. DIARIO DE CAMPO
Actividades de la primera guía de electrónica básica.
Encuentro con estudiantes.
En el primer módulo se estudiaron los conceptos básicos de la electricidad y la
electrónica, se empleó para el trabajo en clase, variedad de dispositivos
electrónicos tales como resistencias, diodos LED, pulsadores y baterías, entre
otros, fundamentales como el voltaje, la corriente, la polaridad de las cargas
electicas, se realizó el montaje de diferentes circuitos de ejemplo los cuales
cumplían funcionalidades muy prácticas (alarmas, juegos de luces, indicadores de
seguridad, sistemas automáticos de iluminación , etc) de amplio uso y de posible
utilidad en infinidad de aplicaciones de uso cotidiano, se realizó también una
introducción al uso de sensores y el tipo de señal que estos dispositivos pueden
manejar, finalmente se realizó una introducción al pensamiento algorítmico y los
principios de la programación, de esta manera, basados en el conocimiento
adquirido, se realizó el cierre del módulo con la exposición de seis proyectos
finales en los que el hardware y el software se integraron para dar vida a los
diferentes montajes, este evento de cierre fue realizado dentro de una muestra
tipo feria realizada al interior de la institucón en donde los alumnos compartieron
con el resto de sus compañeros, profesores y demás miembros de la comunidad
la cual también fue convocada.
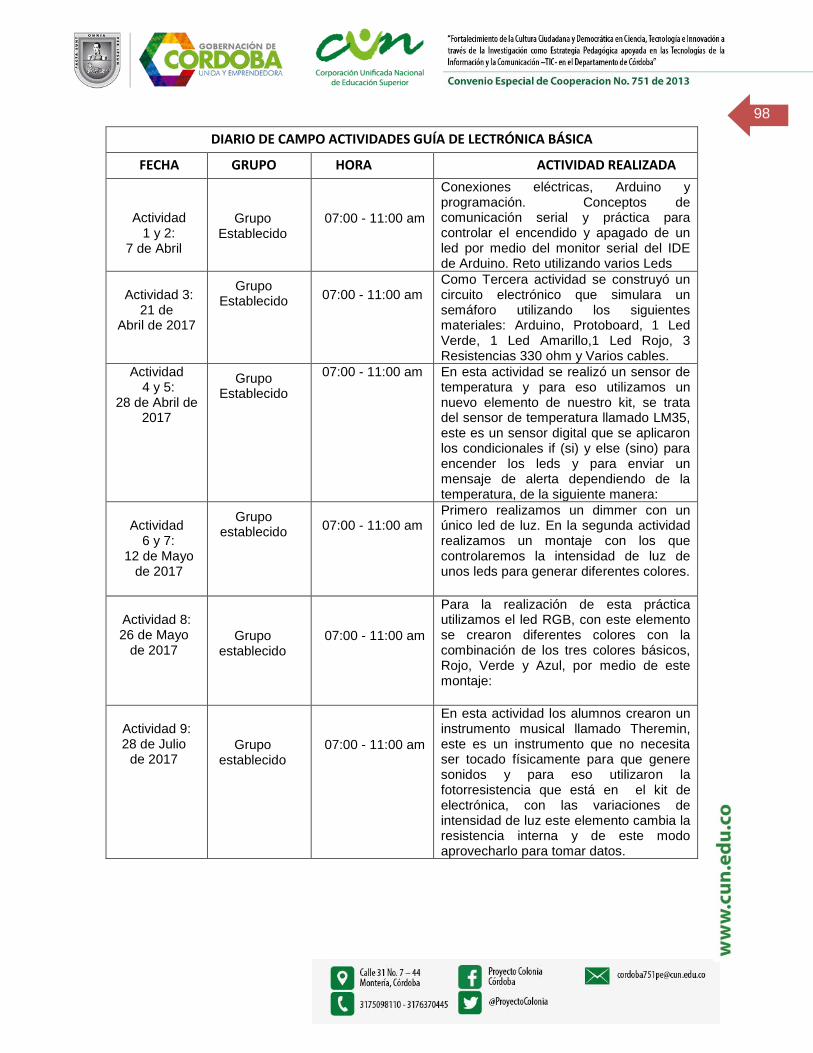
98
DIARIO DE CAMPO ACTIVIDADES GUÍA DE LECTRÓNICA BÁSICA
FECHA GRUPO HORA ACTIVIDAD REALIZADA
Actividad
1 y 2: 7 de Abril
Grupo
Establecido
07:00 - 11:00 am
Conexiones eléctricas, Arduino y programación. Conceptos de comunicación serial y práctica para controlar el encendido y apagado de un led por medio del monitor serial del IDE de Arduino. Reto utilizando varios Leds
Actividad 3:
21 de Abril de 2017
Grupo Establecido
07:00 - 11:00 am
Como Tercera actividad se construyó un circuito electrónico que simulara un semáforo utilizando los siguientes materiales: Arduino, Protoboard, 1 Led Verde, 1 Led Amarillo,1 Led Rojo, 3 Resistencias 330 ohm y Varios cables.
Actividad 4 y 5:
28 de Abril de 2017
Grupo Establecido
07:00 - 11:00 am En esta actividad se realizó un sensor de temperatura y para eso utilizamos un nuevo elemento de nuestro kit, se trata del sensor de temperatura llamado LM35, este es un sensor digital que se aplicaron los condicionales if (si) y else (sino) para encender los leds y para enviar un mensaje de alerta dependiendo de la temperatura, de la siguiente manera:
Actividad
6 y 7: 12 de Mayo
de 2017
Grupo establecido
07:00 - 11:00 am
Primero realizamos un dimmer con un único led de luz. En la segunda actividad realizamos un montaje con los que controlaremos la intensidad de luz de unos leds para generar diferentes colores.
Actividad 8: 26 de Mayo
de 2017
Grupo
establecido
07:00 - 11:00 am
Para la realización de esta práctica utilizamos el led RGB, con este elemento se crearon diferentes colores con la combinación de los tres colores básicos, Rojo, Verde y Azul, por medio de este montaje:
Actividad 9: 28 de Julio
de 2017
Grupo
establecido
07:00 - 11:00 am
En esta actividad los alumnos crearon un instrumento musical llamado Theremin, este es un instrumento que no necesita ser tocado físicamente para que genere sonidos y para eso utilizaron la fotorresistencia que está en el kit de electrónica, con las variaciones de intensidad de luz este elemento cambia la resistencia interna y de este modo aprovecharlo para tomar datos.
99
ACTIVIDADES DE LA GUIA DE PROGRAMACIÓN CON ARDUINO.
ENCUENTRO CON DOCENTES Y ESTUDIANTES: ENSAMBLE DEL ROBOT.
Una de las tareas principales de este primer grupo de talleres consistió en el
ensamble mecánico de los kits, para esta tarea era indispensable contar con un
espacio de trabajo despejado, un alto nivel de concentración, habilidad motriz fina
y sobre todo mucho orden, ya que del correcto armado del prototipo dependió el
éxito de las sesiones de trabajo con el robot. Debido al alto nivel de complejidad y
con el propósito de esta actividad pudiera ser replicada en posteriores actividades
con el primer encuentro formativo el que realizó la mencionada tarea de ensamble
con los docentes y estudiantes vinculados al proceso en este taller se realizó el
procedimiento completo de armado de los prototipos, se verificó el estado inicial
de la piezas y alrededor de la construcción de los robots se socializaron algunas
ideas fundamentales para el cuidado de los dispositivos y la gama de talleres de
que desarrollaron en clase haciendo uso de esta nueva herramienta.
Ya finalizada la tarea de ensamble descrita anteriormente, la siguiente y no
menos importante tarea que debían los estudiantes llevar a cabo consistió en
realizar las conexiones eléctricas entre cada uno de los sensores y dispositivos y
la placa Arduino, durante este ejercicio se reforzaron algunos de los conceptos
previos de electricidad vistos en el primer módulo, se realizó la presentación de los
dispositivos nuevos del kit que no habían
sido estudiados previamente y se realizó
una actividad de refuerzo sobre la
verificación de las conexiones, la cual
desarrolló la habilidad de corregir fallas de
este tipo y de vital importancia para el
trabajo con robótica.

100
Taller de programación.
Superada entonces la tarea de las conexiones, la siguiente tarea (y una de las
más divertidas fase del proceso) sería poner en marcha y empezar a darle vida a
los robots.
Esta actividad partió de la formulación de la necesidad principal requerida para
poner el movimiento los robots: el movimiento de los motores, en equipo se realiza
el análisis del problema y tras un espacio de socialización se concluye
grupalmente que serían necesarias dos señales de control sobre las que se
estudiaron los segmentos de código o funciones de movimiento creadas para el
desplazamiento del robot:
Sentido de giro de los motores: Dirección adelante – atrás
Control de velocidad: PWM
101
A partir de estas ideas, se estudió con detalle nuevamente la estructura de un
programa, las partes que lo componen y la función que realizan los diferentes
segmentos de código.
Como actividad específica se realizó como ejercicio la digitación de los códigos
que constituyen las librerías para el control del movimiento de los motores el cual
se muestra en las imágenes a continuación.
Durante este taller, se trabajó también sobre el procedimiento de detección y
corrección de errores de sintaxis de los códigos, se dio un repaso al procedimiento
de configuración (selección de placa y puerto de comunicación) para la carga de
los programas a la placa Arduino.
Finalmente, se realizaron pruebas de funcionamiento en donde los alumnos
debían realizar modificaciones al código con el fin de ir dibujando trayectorias cada
vez más complejas de acuerdo al nivel de avance.
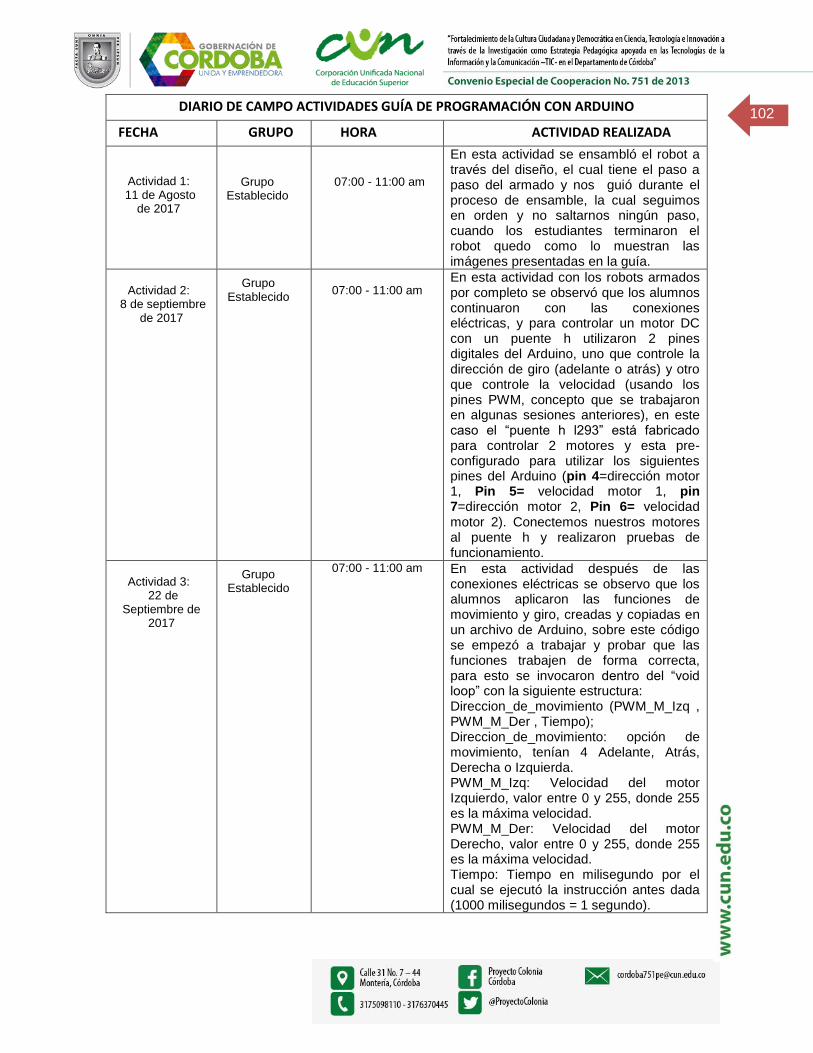
102
DIARIO DE CAMPO ACTIVIDADES GUÍA DE PROGRAMACIÓN CON ARDUINO
FECHA GRUPO HORA ACTIVIDAD REALIZADA
Actividad 1: 11 de Agosto
de 2017
Grupo
Establecido
07:00 - 11:00 am
En esta actividad se ensambló el robot a través del diseño, el cual tiene el paso a paso del armado y nos guió durante el proceso de ensamble, la cual seguimos en orden y no saltarnos ningún paso, cuando los estudiantes terminaron el robot quedo como lo muestran las imágenes presentadas en la guía.
Actividad 2:
8 de septiembre de 2017
Grupo Establecido
07:00 - 11:00 am
En esta actividad con los robots armados por completo se observó que los alumnos continuaron con las conexiones eléctricas, y para controlar un motor DC con un puente h utilizaron 2 pines digitales del Arduino, uno que controle la dirección de giro (adelante o atrás) y otro que controle la velocidad (usando los pines PWM, concepto que se trabajaron en algunas sesiones anteriores), en este caso el “puente h l293” está fabricado para controlar 2 motores y esta pre-configurado para utilizar los siguientes pines del Arduino (pin 4=dirección motor 1, Pin 5= velocidad motor 1, pin 7=dirección motor 2, Pin 6= velocidad motor 2). Conectemos nuestros motores al puente h y realizaron pruebas de funcionamiento.
Actividad 3:
22 de Septiembre de
2017
Grupo Establecido
07:00 - 11:00 am En esta actividad después de las conexiones eléctricas se observo que los alumnos aplicaron las funciones de movimiento y giro, creadas y copiadas en un archivo de Arduino, sobre este código se empezó a trabajar y probar que las funciones trabajen de forma correcta, para esto se invocaron dentro del “void loop” con la siguiente estructura: Direccion_de_movimiento (PWM_M_Izq , PWM_M_Der , Tiempo); Direccion_de_movimiento: opción de movimiento, tenían 4 Adelante, Atrás, Derecha o Izquierda. PWM_M_Izq: Velocidad del motor Izquierdo, valor entre 0 y 255, donde 255 es la máxima velocidad. PWM_M_Der: Velocidad del motor Derecho, valor entre 0 y 255, donde 255 es la máxima velocidad. Tiempo: Tiempo en milisegundo por el cual se ejecutó la instrucción antes dada (1000 milisegundos = 1 segundo).
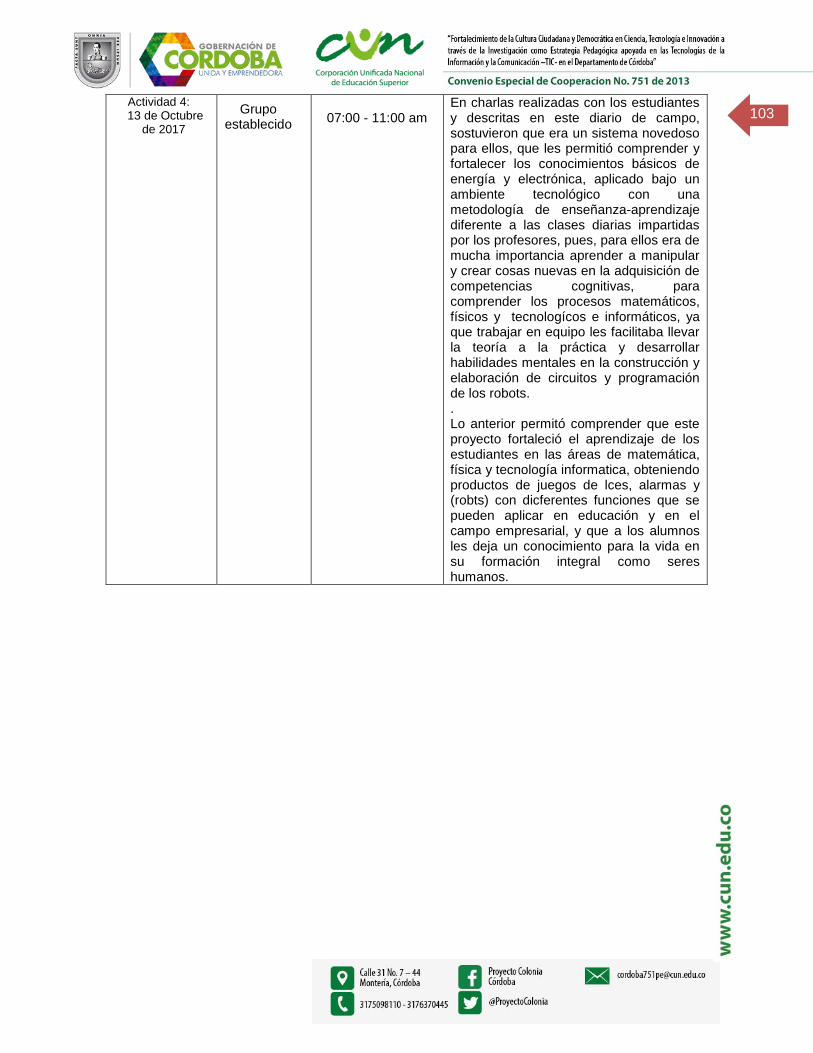
103
Actividad 4: 13 de Octubre
de 2017
Grupo establecido
07:00 - 11:00 am
En charlas realizadas con los estudiantes y descritas en este diario de campo, sostuvieron que era un sistema novedoso para ellos, que les permitió comprender y fortalecer los conocimientos básicos de energía y electrónica, aplicado bajo un ambiente tecnológico con una metodología de enseñanza-aprendizaje diferente a las clases diarias impartidas por los profesores, pues, para ellos era de mucha importancia aprender a manipular y crear cosas nuevas en la adquisición de competencias cognitivas, para comprender los procesos matemáticos, físicos y tecnologícos e informáticos, ya que trabajar en equipo les facilitaba llevar la teoría a la práctica y desarrollar habilidades mentales en la construcción y elaboración de circuitos y programación de los robots. . Lo anterior permitó comprender que este proyecto fortaleció el aprendizaje de los estudiantes en las áreas de matemática, física y tecnología informatica, obteniendo productos de juegos de lces, alarmas y (robts) con dicferentes funciones que se pueden aplicar en educación y en el campo empresarial, y que a los alumnos les deja un conocimiento para la vida en su formación integral como seres humanos.