trabajo fin de grado - bibing.us.esbibing.us.es/proyectos/abreproy/90584/fichero/tfg... · figura...
TRANSCRIPT
i
Trabajo Fin de Grado
Grado en Ingeniería Aeroespacial
Puesta en Vuelo de Planeadores por Torno: Análisis y
Mejora de Sistemas Existentes
Autor: Andrés Jesús García Moreno
Tutor: Diego Jerónimo Morillo Galeote
Dep. Proyectos
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016

ii
iii
Trabajo Fin de Grado
Grado en Ingeniería Aeroespacial
Puesta en Vuelo de Planeadores por Torno: Análisis
y Mejora de Sistemas Existentes
Autor:
Andrés Jesús García Moreno
Tutor:
Diego J. Morillo Galeote
Profesor asociado
Departamento de Proyectos
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2016

iv

v
Trabajo Fin de Grado: Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas
Existentes
Autor: Andrés Jesús García Moreno
Tutor: Diego J. Morillo Galeote
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes
miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:

vi
Sevilla, 2016
El Secretario del Tribunal

vii
A mi familia, por haberme
dado esta maravillosa
oportunidad que ellos, no
pudieron tener.
En especial, a mi padre y a mi
tío Antonio, por inculcarme la
pasión por el vuelo, el aire y el
viento, que no son lo mismo.

viii

ix
Resumen
En este documento se pretende, en primer lugar, estudiar la situación actual de los sistemas de puesta
en vuelo por torno de planeadores, también llamados veleros. Se explicará al detalle en qué consiste
este deporte; características particulares de los planeadores, análisis de los sistemas involucrados en
la puesta en vuelo, estado del arte, estudio operativo del lanzamiento de los veleros usando modelos
matemáticos o análisis del comportamiento real que tienen las personas involucradas en el proceso.
Por otro lado, se desarrollará un modelo de análisis, basado en el modelo matemático, para estudiar
la mejora de algún o algunos sistemas existentes y ver así lo resultados de la implementación. Como
objetivo de mejora se sugiere la creación de un calculador de performances además del desarrollo de
un simulador de lanzamientos para su uso como entrenamiento de pilotos y operadores de torno. Por
último, se mostrarán evidencias de que es posible y viable dotar al sistema de automatismo y ser
capaces de controlar automáticamente variables como la tensión del cable en todo instante.

x

xi
Índice
Resumen ix
Índice xi
Índice de Figuras xiii
Índice de Tablas xvi
1 Introducción y Objetivos 1
1.1 Contexto del trabajo 1
1.2 Objetivo del trabajo 2
1.3 Alcance del trabajo 3
2 Descripción del Sistema y Estado-Del-Arte 5
2.1 Subsistema velero 5
2.1.1 Superficies de control y mandos de vuelo 7
2.1.2 Cockpit e instrumentación 8
2.2 Subsistema motor-torno 11
2.2.1 Motor 11
2.2.2 Torno 12
2.3 Subsistema cable-suelta 13
2.3.1 Cable 13
2.3.2 Suelta 16
2.4 Subsistema adicional guillotina 17
3 Normativa Aplicable 19
3.1 Subparte B -- Vuelo 19
3.2 Subparte C – Estructura 19
3.3 Subparte G – Limites Operacionales 20
4 Análisis de Sistemas Tradicionales de Operación 21
4.1 Operación del sistema desde el torno 21
4.2 Operación del sistema desde el velero 24
4.3 Conclusiones y objetivos de mejora 27
5 Modelado del Sistema 29
5.1 Hipótesis de partida 29
5.2 Modelado de la atmósfera 29
5.3 Modelado del avión 31
5.3.1 Sistema de ecuaciones con entrada tensión de cable 36
5.3.2 Sistema de ecuaciones con entrada velocidad del cable 36
5.3.3 Modelado del avión durante el rodaje 37
5.4 Modelado del motor-torno 38
5.5 Modelado del cable 42
5.6 Leyes de control 45

xii
5.7 Modelado del sistema completo 45
5.8 Implementación en Matlab/Simulink sistema completo 45
5.8.1 Bloque motor 46
5.8.2 Bloque torno 47
5.8.3 Bloque velero Simulink 48
5.8.4 Entradas y salidas del modelo 50
5.8.5 Condiciones iniciales y otros parámetros del Modelo 52
5.9 Modelado del sistema a velocidad constante 53
5.10 Implementación en Matlab/Simulink sistema V constante 54
6 Análisis de Leyes Básicas Y Estudio de Performances 57
6.1 Resultados del sistema completo - Ley de control piloto y torno 57
6.1.1 Análisis de la trayectoria 61
6.1.2 Análisis de la tensión del cable 63
6.1.3 Análisis de la velocidad aerodinámica 64
6.1.4 Análisis del resto de variables 64
6.1.5 Variables normalizadas 66
6.2 Resultado del lanzamiento a velocidad constante y tensión conocida 68
6.2.1 Análisis de la trayectoria 68
6.2.2 Análisis del resto de variables y normalización 71
6.3 Estudio de Performances 73
7 Modelado y Análisis de los Sistemas de Mejora Propuestos 79
7.1 Modelado del Simulador 79
7.2 Calculador de performances para cada velero y condiciones 81
7.3 Lanzamiento con sistema de control de tensión 83
8 Conclusiones 87
8.1 Conclusiones del análisis de las variables 87
8.2 Conclusiones del estudio de performances 88
8.3 Resultados obtenidos con las aplicaciones desarrolladas 89
8.4 Tendencias futuras 90
Anexos 93
Bibliografía 105

xiii
ÍNDICE DE FIGURAS
Figura 2—1 Esquema Lanzamiento de Velero Por Torno 5
Figura 2—2 Planeador ASW 28 6
Figura 2—3 Motovelero Stemme S10 6
Figura 2—4 Planeador L-13 Blanik 6
Figura 2—5 Archaeopteryx 6
Figura 2—6 Partes de un Velero 6
Figura 2—7 Diferentes Cambios en la Actitud de una Aeronave 7
Figura 2—8 Mandos de Vuelo en un Velero 8
Figura 2—9 Instrumentación Típica de un Velero 8
Figura 2—10 Lana en la Visera de un Velero 9
Figura 2—11 Efecto de una Térmica 10
Figura 2—12 Vuelo de Ladera 10
Figura 2—13 Onda de Montaña 10
Figura 2—14 Torno Simple 12
Figura 2—15 Torno de Doble Cable 12
Figura 2—16 Torno de 6 Bobinas 13
Figura 2—17 Cable Tocando el Terreno en un Despegue 14
Figura 2—18 Fusibles por Colores 15
Figura 2—19 Terminal del Cable Usado en Lanzamiento de Veleros 16
Figura 2—20 Actuador de Suelta Rápida del Cable 16
Figura 2—21 Guillotina 17
Figura 4—1 Velero en el Momento de la Rotación 22
Figura 4—2 Velero Ascendiendo con Ángulo de 45º 23
Figura 4—3 Velero en el Momento de la Suelta del Cable 24
Figura 4—4 Corredor de Ala 25
Figura 4—5 Continuidad del Movimiento 26
Figura 5—1 Perfil de Gradiente de Viento de Hellmann para varios Terrenos 30
Figura 5—2 Modelo de Perfil de Viento del Problema 31
Figura 5—3 Esquema del Sistema Velero-Cable 31
Figura 5—4 Definición de Ángulo de Tensión Aplicada 33
Figura 5—5 Velocidad en Ejes Tierra del Sistema 33
Figura 5—6 Velocidad en Ejes Cable 34
xiv
Figura 5—7 Esquema Sistema Motor-Torno 39
Figura 5—8 Momentos de Inercia Solidos Rígidos 41
Figura 5—9 Curva Catenaria Para Varios Cables 42
Figura 5—10 Curva Catenaria Para Varios Cables, Zona Velero 43
Figura 5—11 Diferencia Angular Entre el Cable Real y el Ideal 43
Figura 5—12 Variaciones en la Trayectoria Según Cable Usado 44
Figura 5—13 Diferencia en las Alturas Conseguidas Según Cable Usado 44
Figura 5—14 Esquema del Sistema de Lanzamiento por Torno Completo 45
Figura 5—15 Modelo Completo Simulink 46
Figura 5—16 Bloque Motor Simulink 47
Figura 5—17 Bloque Torno Simulink 47
Figura 5—18 Bloque Velero / Cable Simulink 48
Figura 5—19 Interior Bloque Velero / Cable Simulink 49
Figura 5—20 Entradas del Modelo 50
Figura 5—21 Registro de Datos Motor 51
Figura 5—22 Registro de Datos Velero 51
Figura 5—23 Registro de otras variables 51
Figura 5—24 Bloque Finalización del Lanzamiento 53
Figura 5—25 Modelo Simulink V y T Constantes 55
Figura 6—1 Ley de Control Tornero 57
Figura 6—2 Ley de Control Piloto 58
Figura 6—3 Mapa Motor Vortec 2016 V-8 60
Figura 6—4 Curva Mapa Motor Modelada 61
Figura 6—5 Trayectoria del Lanzamiento 62
Figura 6—6 Influencia del Viento en la Trayectoria 62
Figura 6—7 Tensión del Cable 63
Figura 6—8 Velocidad Aerodinámica 64
Figura 6—9 Factor de Carga 65
Figura 6—10 Régimen de Vueltas del Motor 65
Figura 6—11 Potencia Desarrollada en el Despegue 66
Figura 6—12 Variables Normalizadas Ley Control Piloto y Torno 66
Figura 6—13 Variables Normalizadas Momento de la Rotación 67
Figura 6—14 Suavizado Señal Entrada Tensión 68
Figura 6—15 Trayectoria del Lanzamiento con V Constante 69
Figura 6—16 Variación de la Trayectoria con la Tensión 70
Figura 6—17 Variación de la Trayectoria con la Velocidad 70
Figura 6—18 Coeficiente de Sustentación y Factor de Carga con V Constate 71
xv
Figura 6—19 Variables Normalizadas para V Constante 72
Figura 6—20 Rate Of Climb en función de Tensión y Velocidad 74
Figura 6—21 Ángulo de Asiento en función de Tensión y Velocidad 75
Figura 6—22 Rate Of Climb en función de Tensión y Elevación 76
Figura 6—23 Ángulo de Asiento en función de Tensión y Elevación 77
Figura 6—24 Ley de Performance Óptima 78
Figura 7—1 Modelo Simulink Simulador de Puesta en Vuelo de Veleros 79
Figura 7—2 Actuaciones en Joystick Usado en Simulador 80
Figura 7—3 Pantalla en Tiempo Real del Simulador 80
Figura 7—4 Calculador de Perfomances Display 82
Figura 7—5 Calculador de Performances Evolución Variables 83
Figura 7—6 Modelo Simulink Controlador de Tensión 84
Figura 7—7 Evolución de la Tensión Controlada con PID 85
Figura 7—8 Perfil de Velocidad con Control de Tensión 86

xvi
ÍNDICE DE TABLAS
Tabla 2-1 Datos estimados para cálculo de potencia necesaria 12
Tabla 2-2 Cables usados en lanzamientos por torno 14
Tabla 5-1 Valores del exponente de Hellman en función de la rugosidad del terreno 30
Tabla 5-2 Conjunto de variables del problema avión-cable 32
Tabla 5-3 Variables de control del problema 35
Tabla 5-4 Coeficientes para fuerzas arrastre y rodadura 38
Tabla 5-5 Conjunto variables del problema motor-torno 39
Tabla 5-6 Condiciones iniciales para el arranque de la integración 52
Tabla 6-1 Parámetros velero ASK21 58
Tabla 6-2 Otros parámetros de entrada 60
Tabla 6-3 Valores máximos alcanzados para normalizar 67
Tabla 6-4Valores de entrada tensión y velocidad 68
Tabla 6-5 Valores máximos alcanzados para normalizar 72

1
1 INTRODUCCIÓN Y OBJETIVOS
os planeadores o veleros son un tipo de aeronave sin motor, que junto con el parapente y el ala
delta, comparten la práctica del denominado, vuelo libre. Este tipo de vuelo se caracteriza por
carecer de planta propulsora y por ello, las únicas fuerzas que actúan sobre la aeronave son las
fuerzas aerodinámicas, el propio peso y las fuerzas derivadas de la energía de la atmósfera.
1.1 Contexto del trabajo
El velero en particular, es el medio usado para la práctica del deporte denominado vuelo a vela, el
cual, tiene como principal objetivo permanecer en el aire el mayor tiempo posible, entre otros.
Debido a la naturaleza del deporte, se requiere una aeronave con alta eficiencia aerodinámica,
disminuyendo así, la velocidad vertical de planeo y aumentando por ello la distancia recorrida y el
tiempo de vuelo. Esto se consigue usando alas muy esbeltas que reducen la resistencia aerodinámica.
También forman parte de este deporte, las propiedades atmosféricas, así como el relieve geográfico
del entorno, jugando un papel clave en el comportamiento del velero. Los practicantes de este
deporte son sabios conocedores de las famosas “térmicas” que se generan en la atmósfera, así como
de las corrientes ascendentes que se generan en las laderas de las montañas. Ambos fenómenos,
ayudan a aumentar la permanencia del velero en vuelo.
Debido a no tener propulsión propia, el velero necesita un sistema o sistemas auxiliares para
despegar y conseguir una altura y posición deseadas en el espacio. A estos sistemas se les denomina
“Sistemas de Puesta en Vuelo” o simplemente “Sistemas de Envuelo”. También se nombrarán a los
mismos en esta memoria como “Sistemas de Lanzamiento de Planeadores”.
Principalmente existen dos sistemas de puesta en vuelo. En primer lugar, está el sistema de remolque
por aeronave a motor, en el cual, otra aeronave motopropulsada, remolca con un cable al velero hasta
la altura y posición deseada. Cuando se llega a ese punto, el velero suelta el cable mediante un
sistema mecánico, liberándose así de la aeronave auxiliar y comenzando su planeo libre.
En segundo lugar, está el sistema de lanzamiento mediante torno. Éste, consiste en un torno actuado
por un motor generalmente de combustión. El torno se sitúa en un extremo de la pista de despegue de
forma que el velero quede en el otro. El motor del torno le comunica a éste un par, el cual genera
movimiento a una bobina acoplada. En la bobina, un cable (el cual está unido en su extremo al
velero) se irá enrollando, comunicándole velocidad al velero y haciéndolo así despegar. Cuando el
velero se encuentre a un ángulo algo menor al de la vertical del torno, un sistema mecánico soltará el
cable, finalizando así la fase de lanzamiento.
Este último sistema será el objeto de estudio de este trabajo, analizando a fondo su funcionamiento
L
Tira de la palanca a tope y reza para que no se
rompa el cable.
- Antonio García -

Introducción y Objetivos
2
2
actual y desarrollando posibles mejoras.
Finalmente, decir que el lanzamiento por torno es, a día de hoy, una tarea compleja a la vez que
peligrosa, siendo íntegramente controlada y realizada por personas físicas.
Dentro del lanzamiento existen dos papeles fundamentales. Por un lado, el “lanzador o tornero”, el
cual, necesita tener una amplia experiencia para realizar el lanzamiento con éxito y por otro lado, el
piloto, el cual, es consciente de la criticidad que tiene el momento del lanzamiento.
La principal motivación de la que nace este estudio, es la falta de información acerca del proceso de
lanzamiento mediante torno. Existe mucha literatura sobre técnicas de vuelo de planeadores, en
cuanto a planeo y condiciones atmosféricas, sin embargo, es muy escasa la información relativa al
lanzamiento. A pesar de ello, el sistema torno es el que, en definitiva, le aporta al velero la altura
necesaria para comenzar su vuelo libre, por lo que, se considera una parte del proceso crucial en el
deporte.
Es por ello, que se considera atractivo a la vez que necesario, dedicar un estudio a este tipo de
sistemas, estudiar si existe o no optimización de los mismos, alguna posible mejora o cualquier
resultado después de un análisis que ayude al proceso global y enfocado, como no podría ser de otra
forma, a los interesados en este deporte.
1.2 Objetivo del trabajo
Este trabajo tiene como objetivos los siguientes puntos.
Analizar el estado-del-arte de los sistemas de lanzamiento de planeadores por torno, tanto en
la faceta puramente mecánica como en la faceta de control (operación) y seguridad.
En base al estudio anterior, seleccionar algún sistema o subsistema susceptible de mejora.
Definir el objetivo de mejora y desarrollarlo. Como objetivo de mejora se sugiere la
sustitución parcial o total del operador de torno mediante un sistema de control automático.
Analizar y comparar pros y contras del sistema mejorado respecto a los sistemas sin mejorar,
extrayendo las correspondientes conclusiones finales.
La primera acción de este encargo, fue analizar los objetivos y ver en qué medida podían ser
cumplidos. A lo largo de esta memoria, se verá como los objetivos han ido adecuándose a la
naturaleza del problema.
Por un lado, en este trabajo, no se hablará de sistema como dispositivo físico encargado de
desarrollar una función, si no como conjunto de procedimientos relacionados entre sí, que regulan el
funcionamiento de un grupo. Por ello, se verá como se hace especial hincapié en el análisis de la
operación del sistema completo y evolución de las principales variables, primero en la realidad y
segundo, buscando el reflejo en los modelos matemáticos desarrollados.
Se intentará dar un poco de luz acerca de este tipo de prácticas y se hará un estudio de performances
donde se vea como se puede o no, optimizar una puesta en vuelo de veleros.
Por otro lado y para aprovechar el modelo matemático desarrollado, se crearán aplicaciones prácticas
de uso particular como son, un calculador de actuaciones y performances para cualquier tipo de
veleros y un simulador de lanzamientos, con el que cualquier usuario puede verse envuelto en un
lanzamiento completo de forma virtual.
Por último y como respuesta de uno de los objetivos planteados anteriormente, se mostrará evidencia
de que es posible desarrollar un controlador automático que libere carga de trabajo al operador de
torno o incluso lo sustituya.

3
3 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
1.3 Alcance del trabajo
El alcance del trabajo está definido por el estudio y desarrollo teórico de la puesta en vuelo de
planeadores y de la mejora de los sistemas existentes considerados, así como el desarrollo de las
aplicaciones citadas. Sería objeto de otro trabajo, la implementación o comparación de las mejoras
aquí consideradas en el mundo real, pudiendo así cuantificar cuanto se acerca a la realidad el modelo
teórico.
También se considera fuera del alcance del trabajo, la posible comercialización de las aplicaciones
desarrolladas en este documento, aunque se comentará el alto atractivo que pudieran tener de cara al
público interesado en este deporte.

Introducción y Objetivos
4
4

5
2 DESCRIPCIÓN DEL SISTEMA Y ESTADO-DEL-ARTE
l sistema de lanzamiento por torno se compone básicamente de los siguientes subsistemas:
velero, motor-torno, cable-suelta y guillotina. Podría considerarse también, la interacción
humana que hace posible el lanzamiento como otro subsistema aunque eso se desarrollara más
adelante. En el siguiente esquema gráfico se puede ver la posición de cada uno de los subsistemas de
manera sencilla.
Figura 2—1 Esquema Lanzamiento de Velero Por Torno
2.1 Subsistema velero
Este subsistema es el velero en sí. En este apartado se explicará con detalle las partes, características
y otras cualidades de los veleros.
Como se ha comentado anteriormente, los veleros son aeronaves de alta eficiencia aerodinámica, por
lo que su diseño aerodinámico es bastante particular. Tanto el fuselaje como las alas, están diseñados
con formas esbeltas para minimizar la zona expuesta y así la resistencia. El ala posee gran
alargamiento, parámetro clave que relaciona la geometría con la eficiencia aerodinámica. En cuanto
a la cabina o cokpit, debido al espacio reducido, es bastante compacta. Los veleros suelen ser
monoplazas o biplazas.
A continuación se representan algunos de los modelos de planeadores más usados en la actualidad.
En la Figura 2—2 y Figura 2—4 se pueden observar veleros usados en la actualidad, tanto modernos
como más antiguos. En las otras figuras se observan por otro lado las últimas tendencias en
planeadores, donde se ve como algunos incorporan motor y otros incluso despegan a pie.
E
Descripción del Sistema y Estado-Del-Arte
6
6
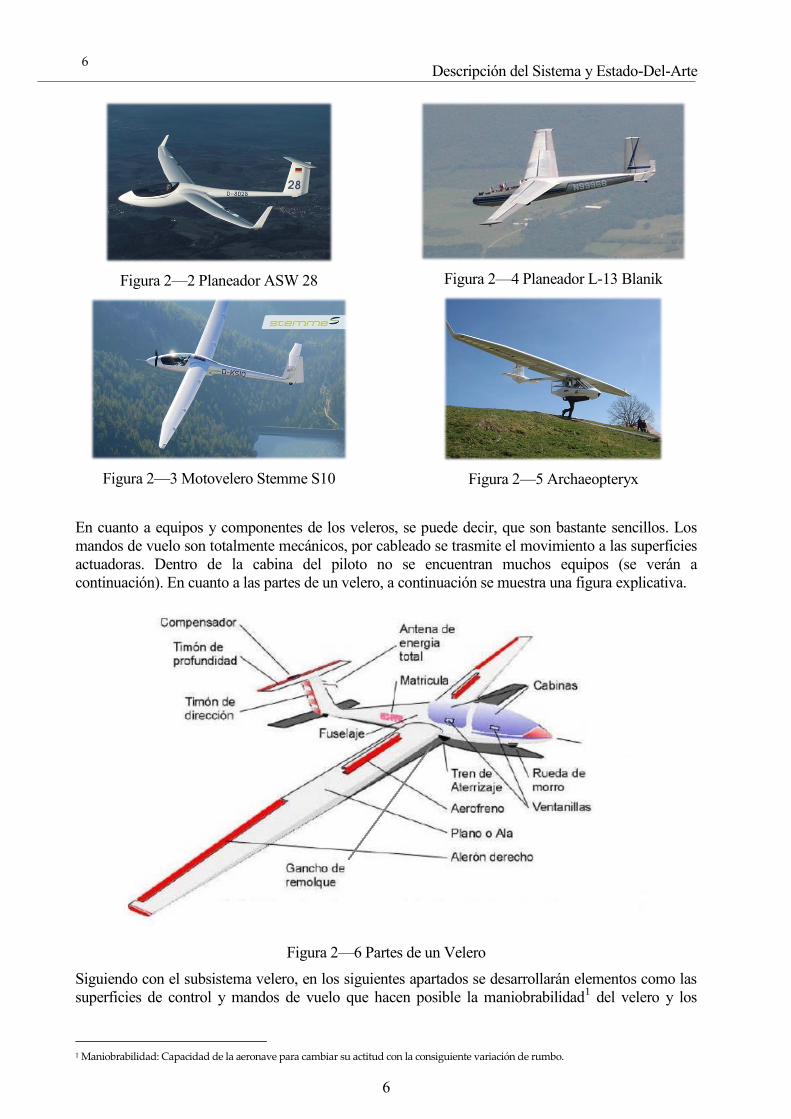
Figura 2—2 Planeador ASW 28
Figura 2—3 Motovelero Stemme S10
Figura 2—4 Planeador L-13 Blanik
Figura 2—5 Archaeopteryx
En cuanto a equipos y componentes de los veleros, se puede decir, que son bastante sencillos. Los
mandos de vuelo son totalmente mecánicos, por cableado se trasmite el movimiento a las superficies
actuadoras. Dentro de la cabina del piloto no se encuentran muchos equipos (se verán a
continuación). En cuanto a las partes de un velero, a continuación se muestra una figura explicativa.
Figura 2—6 Partes de un Velero
Siguiendo con el subsistema velero, en los siguientes apartados se desarrollarán elementos como las
superficies de control y mandos de vuelo que hacen posible la maniobrabilidad1 del velero y los
1 Maniobrabilidad: Capacidad de la aeronave para cambiar su actitud con la consiguiente variación de rumbo.

7
7 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
elementos de instrumentación que ayudan a la correcta navegación.
2.1.1 Superficies de control y mandos de vuelo
Las superficies actuadoras de un velero son las siguientes:
Timón de profundidad
Superficie que se utiliza para crear un momento de cabeceo en el avión.
Timón de dirección
Superficie que genera un momento de guiñada en el velero.
Alerones
Superficie que generan el momento de alabeo en el velero.
Flaps
Elementos que aumentan la superficie sustentadora, sirviendo principalmente para reducir la
velocidad de entrada en pérdida1 del aparato, dando la posibilidad así, de aterrizar a una velocidad
menor.
Aerofreno
Superficie alojada en la parte superior del ala (extradós) que al activarse, rompen la capa límite del
ala2 generando mayor resistencia con el objetivo de reducir la velocidad. Son elementos comunes en
los veleros ya que éstos pueden alcanzar velocidades muy altas y en el aterrizaje es necesario su uso.
Para aclarar cómo afecta en la actitud del avión cada uno de los momentos, se representa la siguiente
figura.
Figura 2—7 Diferentes Cambios en la Actitud de una Aeronave
Para accionar cada superficie de control están los mandos de vuelo, que se basan simplemente en el
stick o palanca y los pedales.
Stick o palanca
Con este mando de vuelo se actúa sobre los alerones y el timón de profundidad, como en cualquier
otra aeronave, provocando momentos de alabeo o cabeceo, respectivamente. Cabe destacar que
debido al diseño de estas aeronaves los movimientos de palancas deben ser muy precisos, ya que
debido a la alta velocidad que pueden alcanzar y la longitud de los alerones (que depende
1 Entrada en pérdida: situación en la que la velocidad aerodinámica de la aeronave es lo suficientemente baja como para no lograr una sustentación que iguale al propio peso del aparato, resultando así, la pérdida de altura sin control de la aeronave. 2 Capa límite: Línea imaginaria a partir de la cual, la corriente de aire deja de ser laminar y estar adherida a la superficie aerodinámica, provocando por ello, torbellinos de corriente turbulenta que aumentan la resistencia.

Descripción del Sistema y Estado-Del-Arte
8
8
directamente en el efecto que tienen) hace que le doten de una maniobrabilidad muy acusada.
Pedales
Como en todas las aeronaves, los pedales actuados por los pies, sirven para actuar sobre el timón de
dirección y así provocar un momento de guiñada al velero, útil para compensar los giros
combinándolo con los alerones o corregir resbalamientos.
En la siguiente figura se muestra la posición de los mandos de vuelo en un velero típico.
Figura 2—8 Mandos de Vuelo en un Velero
2.1.2 Cockpit e instrumentación
Como se ha avanzado anteriormente, un velero no cuenta con demasiados equipos de ayuda a la
navegación. Sin embargo, no por ello, los usados son menos importantes. A continuación se
representa una configuración típica de la cabina de un velero en la que se puede ver los instrumentos
usados.
Figura 2—9 Instrumentación Típica de un Velero

9
9 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Se puede decir que la instrumentación arriba indicada corresponde a un velero bastante
evolucionado. Antiguamente y en la actualidad, se puede ver algunos planeadores en los que no
existen sistemas de GPS o sobre todo Turn & Slip. Se explica a continuación cada uno de los
instrumentos por separado.
Indicador de velocidad de aire (o velocidad aerodinámica)
Este instrumento da información de la velocidad que tiene el velero con respecto al viento en todo
momento, siendo ésta la más importante a conocer. Nótese que esta velocidad no es la velocidad que
tiene el velero con respecto a tierra ya que estas dos magnitudes varían en función de la velocidad del
viento en la zona de vuelo correspondiente.
Compás
El compás o brújula da información sobre el rumbo que lleva la aeronave en grados.
GPS
Información detallada de la posición del velero y todas sus aplicaciones (distancias recorridas,
programación de rutas, etc.)
Horizonte artificial
Este instrumento aporta la inclinación que tiene el velero con respecto al horizonte del terreno.
Radio
Elemento primordial para establecer comunicaciones con personas en tierra.
Turn & Slip
Instrumento recientemente incorporado en los veleros que da información acerca del resbalamiento1
con el que se está volando en ese momento.
A pesar de que este instrumento es relativamente nuevo, la información acerca del resbalamiento
siempre ha sido recibida por un instrumento mucho más simple al igual que efectivo. El elemento del
que se habla es conocido como la “lana”. Sí, una simple lana puesta estratégicamente en la visera de
la cabina del piloto era y sigue siendo suficiente para medir el resbalamiento con el que vuela
cualquier aeronave. Debido a la simpleza que siempre ha caracterizado a los planeadores es muy
común ver esto incorporado en ellos. La siguiente figura muestra el elemento en sí mismo.
Figura 2—10 Lana en la Visera de un Velero
1 Resbalamiento: Se vuela con resbalamiento cuando el eje longitudinal de la aeronave no es paralelo a la dirección relativa del viento. Es decir, notamos una componente del viento por alguno de los lados del velero.

Descripción del Sistema y Estado-Del-Arte
10
10
Altímetro
Elemento que aporta la información de la altitud que posee el velero en todo momento.
Variómetro real y compensado
Instrumento esencial en el deporte con planeadores. Este elemento aporta la velocidad vertical de
subida o de bajada con la que vuela el velero. En otras palabras, aporta el ratio con el que el velero
baja o sube, ratio expresado en metros por segundo. Es importante diferenciar los dos tipos de
variómetros usados, pero antes de ello, es recomendable recordar y explicar los siguientes conceptos.
Como se adelantó en la introducción, un velero, al carecer de motor, se ayuda de la energía que tiene
la atmósfera para aumentar su tiempo de vuelo. La energía de la que se habla pertenece a corrientes
ascendentes de aire, las cuales, aportan altura al velero (energía potencial) o simplemente, le hacen
no descender sin necesidad de perder velocidad. Estas corrientes ascendentes de aire se deben
principalmente a tres fenómenos atmosféricos: térmicas o corrientes calientes, vuelo de ladera y onda
de montaña. En la siguiente imagen se representa gráficamente cada una de ellos.
Figura 2—11 Efecto de una Térmica
Figura 2—12 Vuelo de Ladera
Figura 2—13 Onda de Montaña
El primer fenómeno, la térmica, es bien conocido por todos aunque nunca supiéramos que era. En el
cielo, a veces se observa como un grupo de aves vuelan en círculo sin necesidad de remar con las
alas. Esto, es debido a que se encuentran en una columna ascendente o térmica, la cual, usan para
ganar altura sin necesidad de remar. El segundo de ellos, también la vemos en las aves. Todos hemos
visto alguna vez, sobre todo en zonas de costas, cómo las gaviotas vuelan por los bloques de pisos de
primera línea de playa cuando el viento incide perpendicularmente en ellos. La incidencia, además
del efecto térmico del sol, hace que se genere la corriente ascendente que ayuda a estas aves, volar
sin necesidad, una vez más, de remar. El último de los fenómenos, la onda de montaña es más difícil

11
11 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
de ver aunque sí es muy común su uso en el deporte del vuelo a vela y nace de la perturbación que
generan grandes obstáculos como las montañas en el fluido atmosférico.
Surge la necesidad entonces, de tener un instrumento que indique al piloto si se encuentra en una
zona de corriente ascendente o no. El variómetro natural o sin compensar, solo distingue las
diferencias de altura, pero no, a qué son debidas. Es decir, si el piloto acciona la palanca pidiendo al
velero que ascienda, éste lo hará siempre que tenga velocidad suficiente y el variómetro indicará
velocidad vertical positiva. No significa esto, que el velero esté en una zona de corrientes
ascendentes, ya que le velero no está ganando energía, simplemente está convirtiendo su energía
cinética (velocidad) en energía potencial (altura).
El variómetro compensado tiene en cuenta únicamente la variación de energía total del velero,
calculándose como la energía cinética más la energía potencial. Es decir, este instrumento indicará si
el velero gana o pierde altura debido a fuentes externas que aporten o absorban energía al sistema
completo. Esta información, a diferencia de la aportada por el variómetro sin compensar, ayuda al
piloto a averiguar si se encuentra en zona favorable (corrientes ascendentes) y por ello, intentar
mantenerse dentro de ella.
Normalmente, el variómetro compensado cuenta con un indicador sonoro a base de pitidos, con el
que el piloto, sin necesidad de mirar hacia el panel de instrumentación, es capaz de obtener dicha
información. La ganancia de energía y por tanto el descubrimiento por parte del instrumento de una
zona favorable para el vuelo, se vería reflejado en pitidos intermitentes, los cuales aumentan su
frecuencia a medida que aumenta la ascendencia del velero.
2.2 Subsistema motor-torno
En este subsistema aparecen dos componentes claves, el motor y el torno.
El motor es el elemento que comunica potencia al sistema completo. Generalmente se usan motores
de combustión diésel debido a que la curva RPM-Par de potencia es favorable con respecto a los
motores de gasolina.
El torno va acoplado mecánicamente al motor. En él, va adaptada una bobina donde se encuentra el
cable, que remolcará al velero cuando el eje de potencia del motor le comunique velocidad y
empiece a dar vueltas recogiendo el cable, como si de un carrete de pesca se tratara.
Debido a la alta cilindrada necesaria en estos motores (a continuación se demostrará), el consumo
sería elevado, sin embargo, el consumo por lanzamiento de cada velero es escaso, debido a que
típicamente, un lanzamiento dura en torno a 40 segundos. Es por ello, que este sistema de en vuelo es
muy usado en clubes de vuelo a vela, siendo más económico que el remolque por otra aeronave.
Contando con el consumo de combustible y con el mantenimiento tanto del sistema motor-torno
como del cable, el coste de un lanzamiento está en torno a 3 €.
2.2.1 Motor
Actualmente, como ya se ha mencionado anteriormente, se suelen usar motores de combustión diésel
ya que cuentan con una curva de par motor más estable en función del régimen de vueltas. Se
adelanta que los motores usados son de gran cilindrada y de una potencia entorno a los 250 CV. Para
demostrar la necesidad o no de estos motores, se realiza a continuación un pequeño y simple cálculo.

Descripción del Sistema y Estado-Del-Arte
12
12
Tabla 2-1 Datos estimados para cálculo de potencia necesaria
Magnitud Velero Valor
Peso estimado 500 Kg x 9,8 m/s2 ≈ 5.000 N
Velocidad típica 30 m/s
Factor Seguridad Cable (η) 1.3
Conversión KW » CV 1.34
Usando los datos de la tabla anterior podemos hacer una primera estimación de la potencia que debe
ser capaz de desarrollar el motor elegido para un lanzamiento de veleros.
5.000 30 1,3 195 260P F V KW CV (2.1)
De la ecuación (2.1) se observa cómo efectivamente, para el lanzamiento de un velero, se necesita
ese rango de potencias. Es por ello que es típico ver en sistemas torno, motores del tipo V8 y
similares.
El motor es controlado de forma manual por el operador de torno, el cual tiene la palanca de gas a
modo de acelerador. Todos los motores dedicados a lanzamientos por torno cuentan con embrague
automático ya que no sería posible que fuera manual debido a la naturaleza de la operación. Esto es
así porque se requiere que el motor comunique una fuerza uniforme al torno y sin interrupciones.
Además, el operador de torno o tornero debe tener un sistema sencillo de actuación, ya que al mismo
tiempo, debe estar atento a la subida del velero y a la comunicación vía radio con el piloto (estos
conceptos se detallarán en el capítulo 4).
2.2.2 Torno
El torno no es más que una gran bobina que hace de carrete para recoger el cable que está conectado
al velero.
Suelen tener un diámetro considerable, para tener capacidad de albergar gran longitud de cable, lo
normal suele ser unos 1000 metros. El motor le comunica a éste la fuerza de rotación mediante un
sistema de transmisión, la cual, en algunos tornos más modernos, es hidráulica, de tal forma que
actúa como freno automático que desembraga el sistema si ve que la tensión suministrada al cable es
más alta de lo que debiera.
A continuación se representan algunas imágenes de tornos típicos.
Figura 2—14 Torno Simple
Figura 2—15 Torno de Doble Cable

13
Figura 2—16 Torno de 6 Bobinas
El conjunto motor y torno forman por tanto, la fuente de potencia que hace que el velero coja la
altura deseada. Para hacer un lanzamiento, el proceso sería el siguiente: posicionar el torno en un
extremo de la pista de despegue, coger el extremo del cable, desenrollar la longitud de cable deseada
(teniendo en cuenta que la altura final suele ser un 45% de la longitud del cable inicial), conectar el
cable al sistema de suelta del velero, comprobar la conexión y los equipos del velero y torno,
establecer comunicación por radio entre el operador de torno y piloto y proceder a la aceleración y
remolque.
Como se observa en las figuras, existen tornos de una bobina o incluso de hasta 6 posiciones,
pudiendo así hacer 6 lanzamientos de veleros consecutivos, que quiere decir, sin necesidad de tener
que recoger el cable y devolverlo al extremo de la pista para conectarlo con el siguiente velero.
2.3 Subsistema cable-suelta
El conjunto cable-suelta es el elemento con el que se transmite la fuerza del motor-torno al velero. Es
un conjunto crítico en el lanzamiento de los veleros, ya que pone en riesgo la seguridad del mismo si
no se tienen en cuenta ciertos aspectos, como el mantenimiento, adecuación del sistema a cada velero
o revisión de la instalación.
2.3.1 Cable
El cable debe ser flexible para que pueda enrollarse fácilmente en el torno a la vez que resistente, ya
que debe soportar cargas a tracción de hasta 10.000 Newtons. Este elemento aunque en primera
instancia no parezca un elemento importante del sistema completo, sí que lo es. El tipo de cable
usado en un lanzamiento hace que se tengan distintas respuestas del sistema ante una misma
configuración. Esto se debe al peso del mismo, ya que al usar una longitud entorno a los 1.000
metros, hace que incluso siendo un cable ligero tenga un peso suficiente como para alterar la
respuesta del sistema, siempre desfavorablemente como se verá más adelante.
Se verá como el peso del cable hace que éste tome la forma curva conocida como catenaria1,
variando el ángulo con el que “se tira” del velero y perjudicando así el lanzamiento. Además del
peso, también influye la resistencia aerodinámica2 del mismo que tiene debido al viento relativo que
incide en él. Este otro efecto hace que se perjudique más aun el lanzamiento.
1 Catenaria: Curva matemática que iguala a la curva real que toma un elemento tipo cuerda apoyado en sus dos extremos. 2 Resistencia aerodinámica del cable: Fuerza opuesta al movimiento del cable, que depende directamente de la zona expuesta al viento, relacionada con el diámetro del cable.
Descripción del Sistema y Estado-Del-Arte
14
14
Todo esto se verá de forma numérica en el apartado dedicado al modelado del cable, pero se puede
adelantar a la vista de los resultados reales y lo indicado anteriormente, que interesa tener un cable
con el menor diámetro posible (menor resistencia aerodinámica) y por otro lado, con la menor
densidad lineal, para así, reducir el peso del mismo.
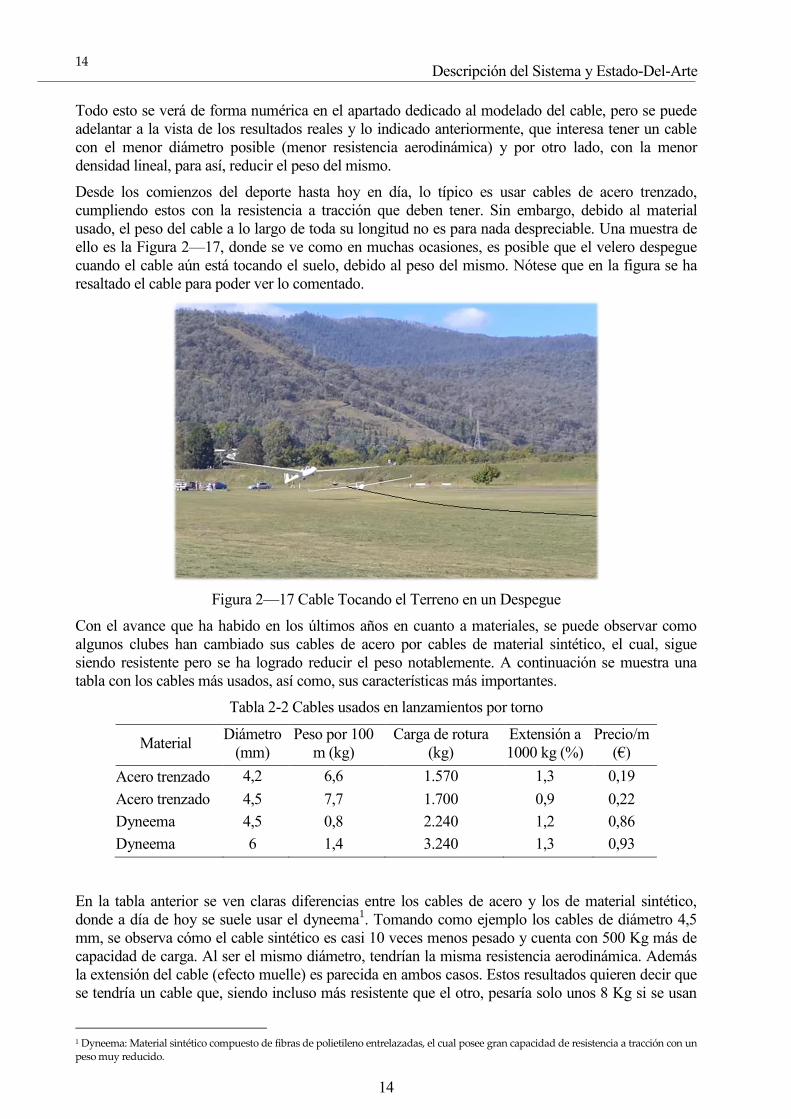
Desde los comienzos del deporte hasta hoy en día, lo típico es usar cables de acero trenzado,
cumpliendo estos con la resistencia a tracción que deben tener. Sin embargo, debido al material
usado, el peso del cable a lo largo de toda su longitud no es para nada despreciable. Una muestra de
ello es la Figura 2—17, donde se ve como en muchas ocasiones, es posible que el velero despegue
cuando el cable aún está tocando el suelo, debido al peso del mismo. Nótese que en la figura se ha
resaltado el cable para poder ver lo comentado.
Figura 2—17 Cable Tocando el Terreno en un Despegue
Con el avance que ha habido en los últimos años en cuanto a materiales, se puede observar como
algunos clubes han cambiado sus cables de acero por cables de material sintético, el cual, sigue
siendo resistente pero se ha logrado reducir el peso notablemente. A continuación se muestra una
tabla con los cables más usados, así como, sus características más importantes.
Tabla 2-2 Cables usados en lanzamientos por torno
Material Diámetro
(mm)
Peso por 100
m (kg)
Carga de rotura
(kg)
Extensión a
1000 kg (%)
Precio/m
(€)
Acero trenzado 4,2 6,6 1.570 1,3 0,19
Acero trenzado 4,5 7,7 1.700 0,9 0,22
Dyneema 4,5 0,8 2.240 1,2 0,86
Dyneema 6 1,4 3.240 1,3 0,93
En la tabla anterior se ven claras diferencias entre los cables de acero y los de material sintético,
donde a día de hoy se suele usar el dyneema1. Tomando como ejemplo los cables de diámetro 4,5
mm, se observa cómo el cable sintético es casi 10 veces menos pesado y cuenta con 500 Kg más de
capacidad de carga. Al ser el mismo diámetro, tendrían la misma resistencia aerodinámica. Además
la extensión del cable (efecto muelle) es parecida en ambos casos. Estos resultados quieren decir que
se tendría un cable que, siendo incluso más resistente que el otro, pesaría solo unos 8 Kg si se usan
1 Dyneema: Material sintético compuesto de fibras de polietileno entrelazadas, el cual posee gran capacidad de resistencia a tracción con un peso muy reducido.
15
15 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
1000 metros, en comparación con los 77 Kg que pesaría el cable de acero y teniendo además, un
margen mayor ante la rotura.
Como se verá en el modelado del cable, esta diferencia de peso influye de forma notable en el
comportamiento del sistema completo.
Como todo en esta vida, el cable sintético tiene sus desventajas. La primera de ellas es la diferencia
de precio. El acero es unas cinco veces más barato que el cable de dyneema y además, al estar
compuesto únicamente por fibras entrelazadas sin ningún tipo de protección, sufre un desgaste muy
elevado, por lo que requerirá además de un cuidado especial y la sustitución más temprana del
mismo, para evitar así, una rotura en pleno lanzamiento.
Todos los cables, independientes del material utilizado para su fabricación, cuentan en el extremo
más pegado al velero, con un trozo de cuerda con varios componentes que se detallan a continuación.
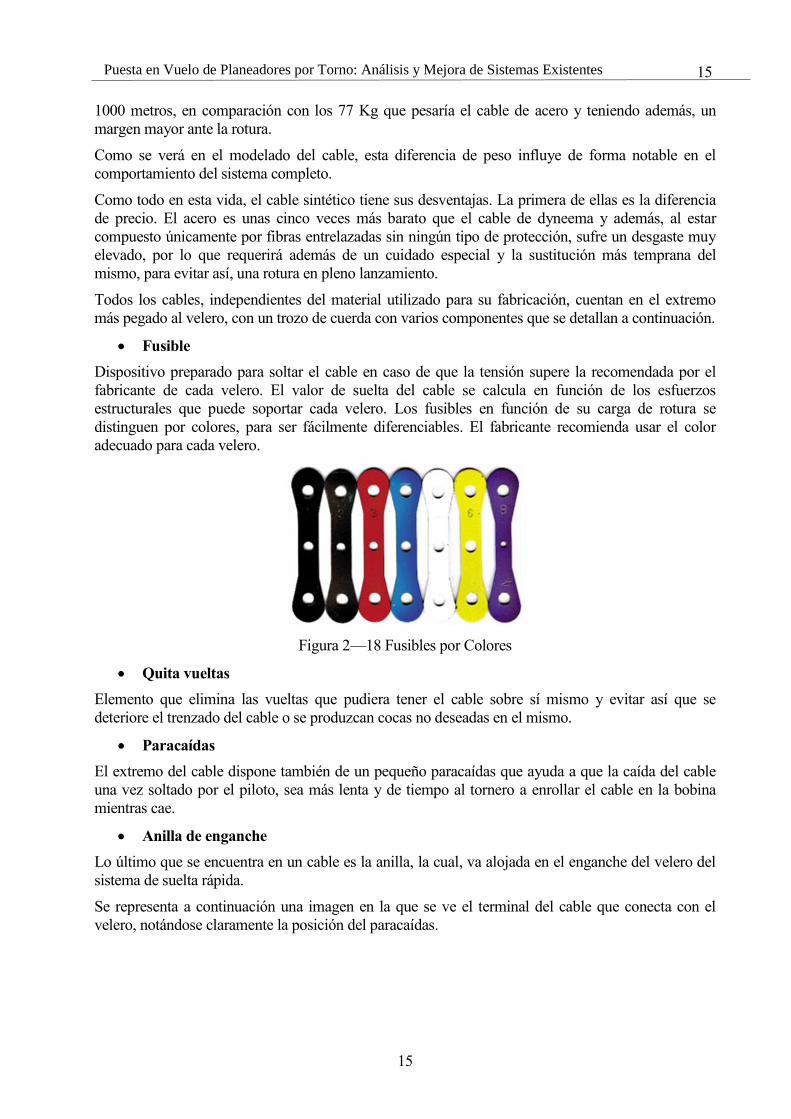
Fusible
Dispositivo preparado para soltar el cable en caso de que la tensión supere la recomendada por el
fabricante de cada velero. El valor de suelta del cable se calcula en función de los esfuerzos
estructurales que puede soportar cada velero. Los fusibles en función de su carga de rotura se
distinguen por colores, para ser fácilmente diferenciables. El fabricante recomienda usar el color
adecuado para cada velero.
Figura 2—18 Fusibles por Colores
Quita vueltas
Elemento que elimina las vueltas que pudiera tener el cable sobre sí mismo y evitar así que se
deteriore el trenzado del cable o se produzcan cocas no deseadas en el mismo.
Paracaídas
El extremo del cable dispone también de un pequeño paracaídas que ayuda a que la caída del cable
una vez soltado por el piloto, sea más lenta y de tiempo al tornero a enrollar el cable en la bobina
mientras cae.
Anilla de enganche
Lo último que se encuentra en un cable es la anilla, la cual, va alojada en el enganche del velero del
sistema de suelta rápida.
Se representa a continuación una imagen en la que se ve el terminal del cable que conecta con el
velero, notándose claramente la posición del paracaídas.
Descripción del Sistema y Estado-Del-Arte
16
16
Figura 2—19 Terminal del Cable Usado en Lanzamiento de Veleros
2.3.2 Suelta
El subsistema suelta del velero es quizás el más crítico de todos. Se trata del alojamiento de la anilla
que está en el extremo del cable de remolque y sirve de unión del mismo con el velero en sí.
La posición de este alojamiento con respecto a la longitud del velero está minuciosamente calculada
de tal forma que coincide con el centro de gravedad del mismo para un correcto remolque del cable,
permitiendo así que la rotación del velero, dependa exclusivamente del velero en sí mismo y no de la
tensión del cable.
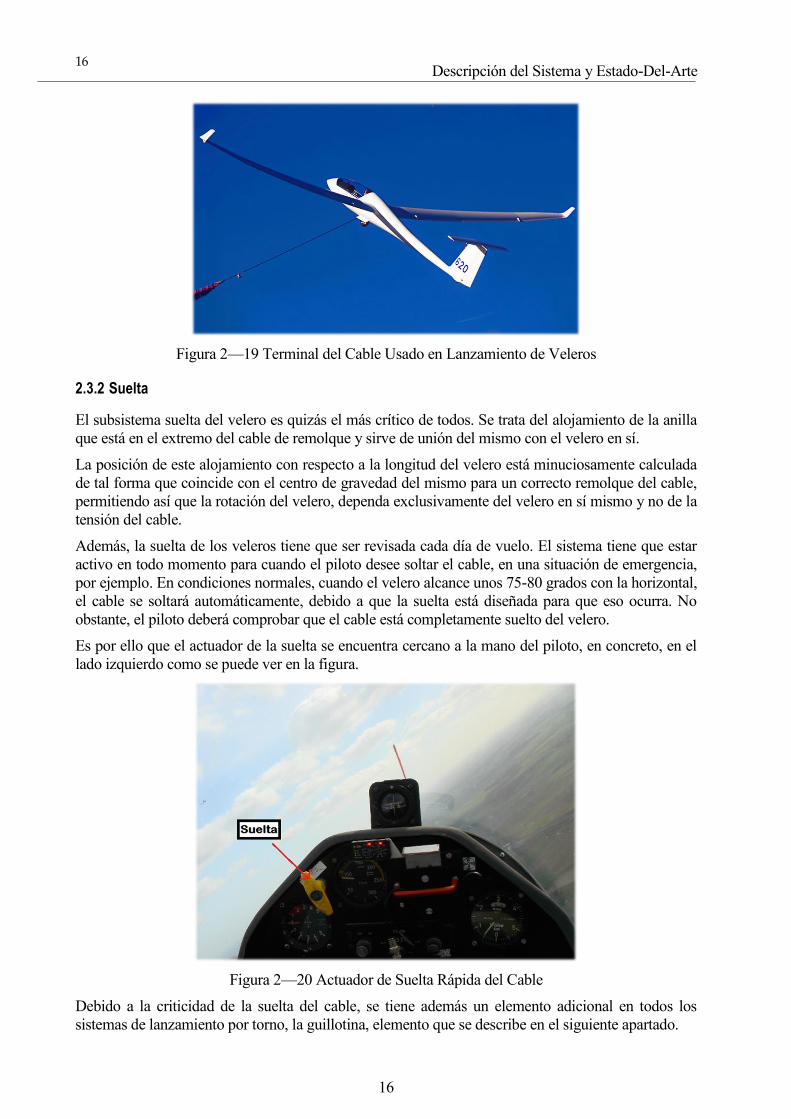
Además, la suelta de los veleros tiene que ser revisada cada día de vuelo. El sistema tiene que estar
activo en todo momento para cuando el piloto desee soltar el cable, en una situación de emergencia,
por ejemplo. En condiciones normales, cuando el velero alcance unos 75-80 grados con la horizontal,
el cable se soltará automáticamente, debido a que la suelta está diseñada para que eso ocurra. No
obstante, el piloto deberá comprobar que el cable está completamente suelto del velero.
Es por ello que el actuador de la suelta se encuentra cercano a la mano del piloto, en concreto, en el
lado izquierdo como se puede ver en la figura.
Figura 2—20 Actuador de Suelta Rápida del Cable
Debido a la criticidad de la suelta del cable, se tiene además un elemento adicional en todos los
sistemas de lanzamiento por torno, la guillotina, elemento que se describe en el siguiente apartado.

17
17 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
2.4 Subsistema adicional guillotina
La guillotina es un elemento indispensable por razones de seguridad.
Todo velero que alcanza la zona de suelta de cable en un lanzamiento debe deshacerse de el con el
sistema de suelta rápida. Aunque es muy poco probable que ocurra, en el caso de que el sistema
tuviera algún problema mecánico y no suelte el cable, el operario de torno tendría la posibilidad de
guillotinar el cable en todo momento.
La guillotina se encuentra en el torno, en la zona por donde sale el cable y su actuador está a mano
del tornero, para que en cualquier momento pueda hacer uso del mismo. Este sistema requiere pues,
una revisión exhaustiva para comprobar el funcionamiento del mismo.
Las guillotinas se diseñan en función del cable que tenga que ser capaz de cortar, influirá el material
y el diámetro del mismo. A pesar de tener este elemento siempre activo, se debe recurrir a él en
última instancia.
Un problema a considerar, es qué ocurriría en caso de que se tenga que activar dicho sistema y el
velero no pueda deshacerse del cable. Como se puede intuir, el planeador se quedaría volando con el
cable colgando bajo el, aumentando el riesgo de que este se enganche en cualquier arbusto u otro
obstáculo que se encuentre por su paso. Es por ello, que en una situación así, se le recomienda al
piloto volar en círculos cerrados alrededor de la pista de despegue hasta que pueda aterrizar.
Figura 2—21 Guillotina

Descripción del Sistema y Estado-Del-Arte
18
18

19
3 NORMATIVA APLICABLE
l vuelo a vela y por tanto los veleros, tienen un hueco dentro de la extensa normativa
aeronáutica [1]. Toda la norma relacionada con este tipo de aeronaves se encuentra en la JAR-
221 o CS-22
2, donde se habla de veleros sin motor y también motoveleros de menos de 750 Kg
y un máximo de 2 tripulantes.
Esta normativa habla de los requerimientos de certificación que deben cumplir este tipo de
aeronaves, normativa que está dentro de la Conferencia Europea de Aviación Civil (JAA) o más
reciente, Agencia Europea de Seguridad Aérea (EASA).
En este capítulo se extraerá la información contenida en la normativa que influye directamente en el
contenido de este estudio. Es decir, se extraerá la información relativa al lanzamiento por torno de
veleros. La CS-22 se divide en dos tomos, el primero de ellos, trata de los requisitos de certificación
y el segundo a los criterios de aceptación de dichos requerimientos. La información necesaria para
este trabajo, se encuentra en el primero de ellos.
3.1 Subparte B -- Vuelo
CS 22.335 (e)
“La velocidad de diseño de un lanzamiento por torno, Vw, no debe ser menor de 110 km/h”
CS 22.335 (f)
“La máxima velocidad de diseño VD, debe ser elegida por el fabricante, pero no debe ser menor
que:
3
min
118D
WV
S Cd
(km/h) for sailplanes of Category U (3.1)
3,5 200D
WV
S
(km/h) for sailplanes of Category A (3.2)
Donde:
W
S Máxima carga alar, (daN/m
2).
Cdmin=Mínimo coeficiente de resistencia del velero”
3.2 Subparte C – Estructura
CS 22.583 (a)
“El velero debe ser remolcado a una velocidad aproximada Vw, con una tensión en el cable aplicada
en el alojamiento de enganche, formando el mismo, un ángulo entre 0º y 75º con la horizontal”
1 JAR: Requerimientos Comunes de Aviación, relativos al diseño, fabricación y operación de las aeronaves. 2 CS: Especificaciones de Certificación,equivalente a la JAR.
E

Normativa Aplicable
20
20
CS 22.581 (b)
“Qnom es la carga que debe soportar el cable de remolque. Debe ser mayor que 1,3 veces el peso
máximo del velero y no menor a 5.000 N”.
CS 22.585 (a)
“El alojamiento del cable en el velero debe ser diseñado para soportar una carga de 1,5 veces
Qnom”
3.3 Subparte G – Limites Operacionales
CS 22.1505 (b)
“La velocidad máxima de vuelo, VNE, no debe exceder 0,9 veces la velocidad demostrada en los test
de vuelo, VDF”
CS 22.1505 (c)
“La velocidad VDF, no debe ser menor que 0,9 veces la velocidad máxima de diseño especificada en
CS 22.335 (f)”
CS 22.1518 (b)
“La máxima velocidad de lanzamiento por torno no debe exceder VW , establecida en CS 22.335 (e)
y no debe exceder VDF”
De la normativa descrita, lo más importante para el desarrollo del trabajo pueden ser los límites en
cuanto a cable a usar, ángulos típicos del cable de remolque o el límite inferior que tiene la velocidad
de remolque ( WV ).
Los valores recomendados y valores límite de WV y tensión del cable en el remolque serán
aportados por el fabricante de cada velero.

21
4 ANÁLISIS DE SISTEMAS TRADICIONALES DE
OPERACIÓN
n este capítulo vamos a describir cómo interactúan todos los sistemas descrito en el capítulo 2.
Ya se adelantó, que un lanzamiento por torno es controlado, a día de hoy, íntegramente por
personas físicas. Se verá en los siguientes apartados, cómo es esa interacción en particular.
4.1 Operación del sistema desde el torno
El control del torno lanzador se puede resumir al control del operario de torno. La persona que
controla el motor que da potencia al sistema completo es el máximo responsable del lanzamiento.
Debido a la complejidad del mismo, se requiere que la persona encargada posea gran experiencia en
el campo y así evitar problemas que puedan aumentar el riesgo que ya tiene de por sí, un lanzamiento
por torno.
El objetivo de todo lanzamiento, es poner el velero lo más alto posible con los metros de cable
usados. Todo ello, teniendo en cuenta las limitaciones del sistema, como tensiones de rotura de cable,
factor de carga del velero o velocidades máximas de remolque.
El funcionamiento básico del sistema es el siguiente: el tornero tiene una palanca a modo de
acelerador con el que acelera más o menos el motor instalado en el torno. Esto se traduce a un
incremento de la velocidad del torno y con ello la gran bobina donde se encuentra el cable enrollado.
Si el tornero aumenta la velocidad de recogida del cable, se aumentará la velocidad transmitida al
velero y con ello la tensión aplicada al cable. Lo crítico de un lanzamiento por torno es saber
comunicar cada velocidad de torno a cada instante del proceso, para que así, no se superen los límites
operacionales tanto los asociados al cable (roturas) como al velero (exceso de aceleraciones).
Para analizar la operación de un lanzamiento desde el punto de vista del tornero se separa el
lanzamiento en las siguientes fases.
Rodaje
En esta primera fase, el operador de torno debe comunicarse con el piloto para esperar la señal del
OK y empezar a remolcar. La comunicación entre ambos es a través de radio. Debido a que lo
normal es que el velero se encuentre a más de un kilómetro de distancia, el operador de torno no
puede obtener ninguna información visual.
El tornero arrancará el motor, comprobará el sistema guillotina y esperará la señal del piloto. Antes
de que empiece el remolque se debe tensar el cable, debido a que se pueden haber quedado
curvaturas en el mismo. Normalmente una persona externa aguanta el velero mientras el tornero
cuidadosamente recoge unos centímetros de cable. Con esto, además de tensar el cable, se
comprueba que no existen obstáculos, que el sistema de anclaje al velero está correcto y en definitiva
que el torno y cable están listos para el remolque.
Cuando el piloto está listo, un mensaje de voz, “remolcando” se trasmite por radio y tornero
empezará a remolcar.
El comienzo del remolque debe ser suave para evitar que el primer tirón que llegue al velero sea
demasiado brusco. En el momento que el velero se empiece a mover el tornero debe acelerar
E

Análisis de Sistemas Tradicionales de Operación
22
22
notablemente el motor del torno para que el velero gane rápidamente una velocidad por encima de la
de entrada en pérdida y este pueda empezar a ganar altura. Desde el principio de la operación, el
tornero recibe la velocidad aerodinámica del velero de forma repetitiva y cantada por el piloto,
mediante el sistema radio.
Rotación
En el momento en el que el velero empieza a ganar altura, comienza la rotación. El tornero, si le llega
la vista y la atmósfera ese día se lo permite, verá como el velero cambia drásticamente su ángulo de
subida y empieza así la famosa trepada1. Este momento es quizás, el más crítico de todos, debido a
que el cable sufre un incremento fuerte de tensión. El tornero debe regular la velocidad suministrada
al torno para que el cable no sufra mayor tensión de la que soporta y no provoque así una rotura del
mismo.
Si una rotura de cable o del fusible ocurriera en este momento, se pondría en serio peligro la
integridad del velero, ya que se le dejará de aportar tensión en un momento en el que se encuentra
con un ángulo de ascenso considerable (unos 45º) y además a una distancia muy pequeña del terreno.
Debido a esos dos hechos, el piloto tendría poco margen de recuperar el vuelo nivelado del velero
antes de llegar al suelo, aumentando el riesgo de un impacto contra el mismo.
Figura 4—1 Velero en el Momento de la Rotación
Ascenso
Mientras que la rotación es un instante pequeño en comparación con todo el lanzamiento, la fase de
ascenso o coloquialmente trepada, es quizás la más larga de todas. La correcta operación del torno en
esta fase será la que determine la altura final conseguida en el lanzamiento. Es por ello, que se debe
controlar cuidadosamente la velocidad del torno, ajustándola según la evolución del vuelo del velero.
Como se dijo en el primer apartado, la velocidad con la que vuela el velero es cantada a través del
sistema radio desde el piloto al tornero. En función del valor en cada instante, el tornero decidirá si
incrementar la velocidad del torno o reducirla, además de estar siempre pendiente de la tensión que
pueda tener el cable. Los fabricantes de cada velero, indican en los manuales de vuelo la velocidad
de remolque óptima y será esta, el objetivo a perseguir del tornero.
Cabe destacar en esta fase, las perturbaciones que provoca la atmósfera. Debido a que el velero está
cruzando la atmosfera verticalmente, se puede encontrar con mucha variabilidad en la misma
(presión, corrientes, temperaturas, etc). Esto hace que varíe irregularmente la velocidad
aerodinámica, lo que provoca que el control del lanzamiento se complique más aún.
Se ha mencionado que el tornero debe estar pendiente de la tensión del cable, pero realmente, esta
1 Trepada: Término usado coloquialmente en aeronáutica para referirse a un tramo de ascenso con un ángulo considerable.
23
23 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
información es imposible de conocer. No existe ningún sistema que indique la tensión del cable en
cada momento, por lo que la única forma que tiene el tornero de saberlo es exprimiendo su
experiencia. Los operadores más experimentados intuyen la tensión que pueda tener un cable
simplemente por la curvatura del mismo por ejemplo, o por como el torno este remolcando en ese
momento (si lo encuentra forzado o no). Otra forma de conocer si se está aportando suficiente
potencia al torno es viendo la actitud del velero. Si se encuentra demasiado horizontal, significará
que se está recogiendo el cable más lento de lo normal y el velero no es capaz de coger la velocidad
suficiente para subir. Si por el contrario, el velero está demasiado encabritado significará que la
velocidad es demasiado grande y el piloto está intentando frenar el velero. En el siguiente apartado se
explicará como el piloto puede actuar sobre la velocidad del velero actuando únicamente sobre la
palanca de mando de vuelo.
Existen tornos más modernos que cuentan con trasmisión hidráulica y son capaces de regular en
cierta medida las revoluciones del torno en función del torque que experimenta, reduciendo las rpm
en caso de que aumente demasiado el torque o aumentándolas en el caso contrario. Aun así son
sistemas de ayuda que en ningún momento aseguran que el cable alcance una tensión mayor a la que
soporta el mismo o el fusible incorporado.
Debido a estos hechos, siempre que se quiera realizar un lanzamiento por torno, se debe contar de un
operador de torno con una experiencia considerable en el campo, para reducir las posibilidades de
cualquier problema que pueda ocurrir y causar un accidente o simplemente para que el lanzamiento
sea eficiente.
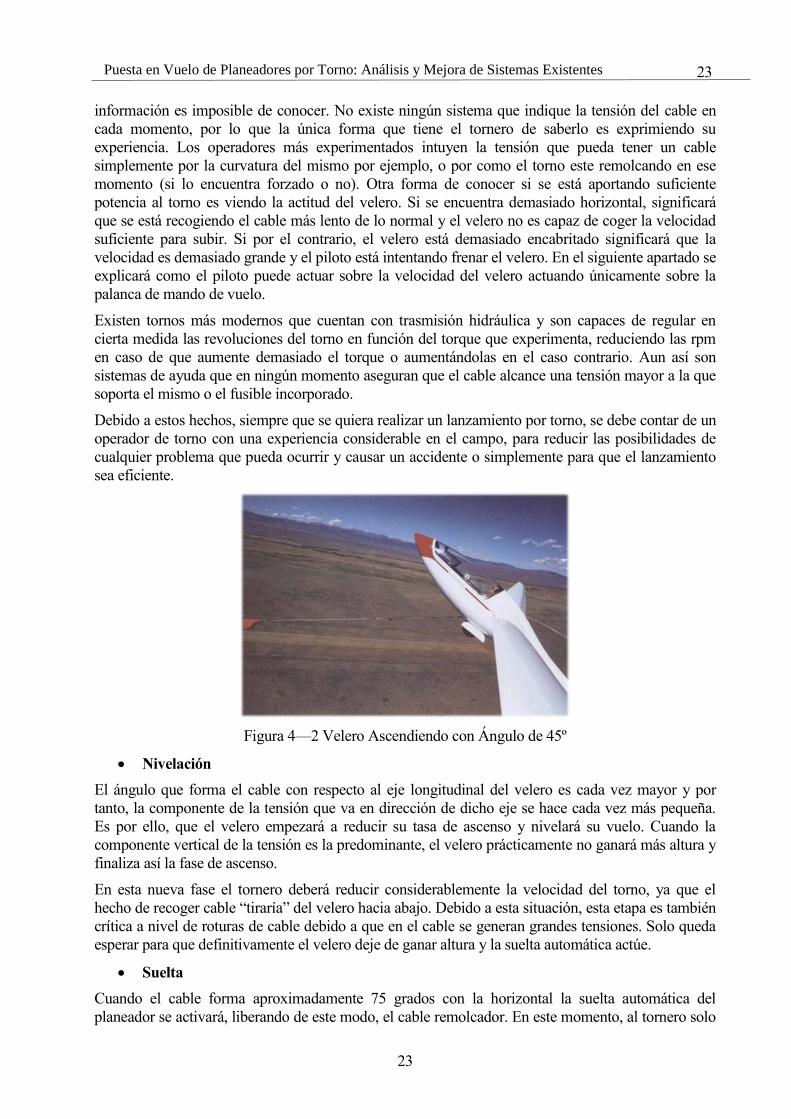
Figura 4—2 Velero Ascendiendo con Ángulo de 45º
Nivelación
El ángulo que forma el cable con respecto al eje longitudinal del velero es cada vez mayor y por
tanto, la componente de la tensión que va en dirección de dicho eje se hace cada vez más pequeña.
Es por ello, que el velero empezará a reducir su tasa de ascenso y nivelará su vuelo. Cuando la
componente vertical de la tensión es la predominante, el velero prácticamente no ganará más altura y
finaliza así la fase de ascenso.
En esta nueva fase el tornero deberá reducir considerablemente la velocidad del torno, ya que el
hecho de recoger cable “tiraría” del velero hacia abajo. Debido a esta situación, esta etapa es también
crítica a nivel de roturas de cable debido a que en el cable se generan grandes tensiones. Solo queda
esperar para que definitivamente el velero deje de ganar altura y la suelta automática actúe.
Suelta
Cuando el cable forma aproximadamente 75 grados con la horizontal la suelta automática del
planeador se activará, liberando de este modo, el cable remolcador. En este momento, al tornero solo

Análisis de Sistemas Tradicionales de Operación
24
24
le queda ir controlando la velocidad del torno de modo que el cable se vaya recogiendo al mismo
ritmo que va cayendo lentamente, gracias al paracaídas que lleva incorporado.
Es de crucial importancia que el tornero esté atento al momento de la suelta del cable. Si ve que han
pasado esos 75 grados con la horizontal y el velero no suelta el cable, debe recurrir a accionar la
guillotina, ya que, puede ser muy peligroso que el velero siga avanzando sin que el cable se suelte.
Figura 4—3 Velero en el Momento de la Suelta del Cable
4.2 Operación del sistema desde el velero
La operación del sistema desde el velero se reduce en este lugar, al piloto. Este, deberá controlar la
palanca de mandos de vuelo de modo que el lanzamiento sea satisfactorio.
Al igual que el tornero debe ser experimentado para un lanzamiento correcto, el piloto que controla
el velero también lo debe ser. Sin embargo, es imposible tener experiencia sin volar, por lo que los
primeros vuelos suelen darse en biplaza en los que el alumno va conociendo la dinámica del
remolque y poco a poco se va familiarizando con el mismo.
De la misma forma que en el apartado anterior, la operación del sistema por parte del piloto se
separará en varias etapas.
Rodaje
Previo al rodaje, el piloto debe comprobar que los mandos de vuelo funcionan a la perfección y que
el sistema de suelta del cable actúa con normalidad. Una vez preparado, lo indicará al tornero
mediante radio. En ese momento el velero empezará a rodar y a acelerar con fuerza.
Cabe mencionar en este momento, la existencia de una tercera persona, necesaria para el correcto
despegue del velero. Como se ve en todas las figuras expuestas en este documento, el velero carece
de un sistema de tren de aterrizaje estable, es decir, solo dispone de una rueda o varias, pero situadas
en el mismo eje longitudinal de la aeronave. Esto se debe a la necesidad de eliminar todo elemento
que provoque un aumento en la resistencia aerodinámica y sea innecesario para el vuelo. Con este
sistema de tren de aterrizaje cuando el velero se encuentra en reposo estará necesariamente,
apoyando uno de sus wingtips1 en el terreno.
Nace la necesidad entonces del llamado corredor de ala2. Esta persona es la encargada de acompañar
al velero en la primera fase del rodaje aguantando en el aire uno de los wingtips. El corredor hará
este acompañamiento hasta que el velero adquiera la velocidad aerodinámica suficiente para que con
controles de alabeo (alerones), sea capaz por sí mismo, de mantenerse estable.
1 Wingtips: Se llama así a los extremos de punta de ala. 2 Corredor de ala: Nombre coloquial con el que se conoce a la persona que aguanta un extremo de ala en el aire en la primera fase del rodaje.

25
25 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 4—4 Corredor de Ala
Una vez que el velero empieza a rodar el piloto mantendrá estable longitudinalmente al velero y
esperará a alcanzar la velocidad de entrada en pérdida. Una vez alcanzada esta, podrá tirar de la
palanca hacia atrás para que el velero despegue y empiece a subir.
Rotación
Una vez el piloto está en el aire comienza la rotación como ya se comentó en el apartado anterior.
Aquí el piloto tendrá que soportar el mayor factor de carga1 del proceso del lanzamiento. A su vez, es
un momento crítico debido a que como ya se sabe, el cable alcanza en este punto un pico de tensión.
Sin embargo, el piloto incapaz de controlar este fenómeno, su único objetivo será no perder de vista
el anemómetro y mantener la velocidad aerodinámica a la recomendada por el fabricante.
Ascenso
Después del instante de la rotación, que dura pocos segundos, viene la etapa de subida. Al igual que
en el caso de la operación desde el punto de vista del torno, de esta etapa dependerá en mayor
medida la altura final conseguida en el lanzamiento.
El piloto deberá no exceder la VW2 y para ello su única entrada al sistema es la palanca de mando.
Recurriendo a la expresión de la energía total de un sistema:
21
2C PE E E mv mgh (4.1)
y la relación del CL 3 con la sustentación (L),
21
2LL V SC (4.2)
se puede llegar a la siguiente conclusión.
Si el piloto tira de la palanca de mandos hacia sí mismo, deflexiona el timón de profundidad de tal
forma que aumenta el coeficiente de sustentación. Esto, hará aumentar la sustentación y por ello la
altura del velero. Para que una conservación de la energía total del velero se cumpla, si aumenta la
altura (aumentando la energía potencial), debe disminuir la velocidad (disminuyendo la energía
cinética). Es por ello que cualquier piloto de aeronaves (sea del tipo que sea), tiene intrínseco en la
1 Factor de Carga: Fuerzas G que la aeronave experimenta en dirección y sentido de la gravedad. 2 VW: Velocidad de diseño del lanzamiento por torno. Según normativa (ver capítulo de Normativa aplicable), no se puede exceder durante el lanzamiento. 3 Coeficiente de Sustentación: Valor que depende de la geometría del ala y de la deflexión del timón de profundidad en cada momento.
Análisis de Sistemas Tradicionales de Operación
26
26
consciencia de piloto, que cuando se tira de palanca, el avión gana altura y reduce velocidad y
viceversa.
En definitiva, el piloto deberá jugar adecuadamente con la palanca en todo momento para lograr la
velocidad aerodinámica deseada. Esto es cien por cien verdad en ausencia de otra fuente de energía.
Sin embargo, durante el lanzamiento, el torno provoca mediante el cable, una fuerte tensión, que
actúa a modo de propulsión. Debido a que el velero se encuentra sólidamente rígido al cable, no
dispone de libertad plena y una variación de altura no siempre puede significar una reducción de
velocidad.
Este último hecho, es una de las razones por la que una trepada en velero remolcado es muy
compleja para un principiante, es una experiencia totalmente distinta que las sufridas en el resto de
aeronaves.
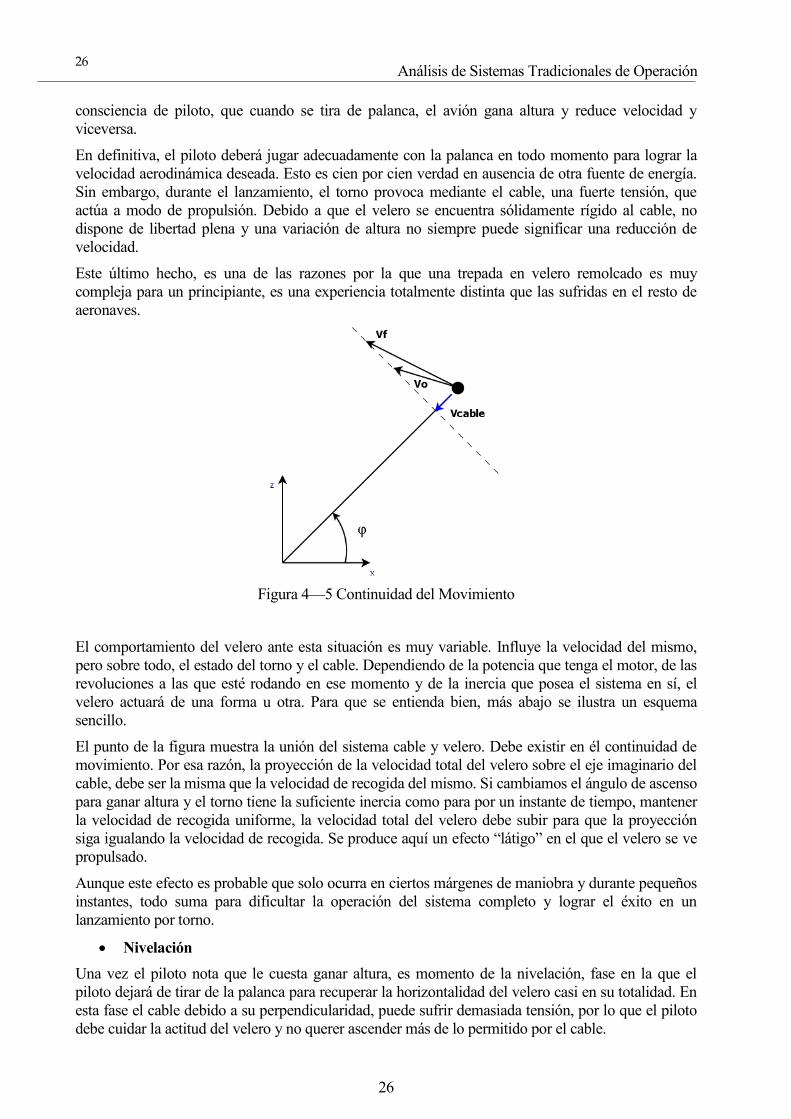
Figura 4—5 Continuidad del Movimiento
El comportamiento del velero ante esta situación es muy variable. Influye la velocidad del mismo,
pero sobre todo, el estado del torno y el cable. Dependiendo de la potencia que tenga el motor, de las
revoluciones a las que esté rodando en ese momento y de la inercia que posea el sistema en sí, el
velero actuará de una forma u otra. Para que se entienda bien, más abajo se ilustra un esquema
sencillo.
El punto de la figura muestra la unión del sistema cable y velero. Debe existir en él continuidad de
movimiento. Por esa razón, la proyección de la velocidad total del velero sobre el eje imaginario del
cable, debe ser la misma que la velocidad de recogida del mismo. Si cambiamos el ángulo de ascenso
para ganar altura y el torno tiene la suficiente inercia como para por un instante de tiempo, mantener
la velocidad de recogida uniforme, la velocidad total del velero debe subir para que la proyección
siga igualando la velocidad de recogida. Se produce aquí un efecto “látigo” en el que el velero se ve
propulsado.
Aunque este efecto es probable que solo ocurra en ciertos márgenes de maniobra y durante pequeños
instantes, todo suma para dificultar la operación del sistema completo y lograr el éxito en un
lanzamiento por torno.
Nivelación
Una vez el piloto nota que le cuesta ganar altura, es momento de la nivelación, fase en la que el
piloto dejará de tirar de la palanca para recuperar la horizontalidad del velero casi en su totalidad. En
esta fase el cable debido a su perpendicularidad, puede sufrir demasiada tensión, por lo que el piloto
debe cuidar la actitud del velero y no querer ascender más de lo permitido por el cable.

27
27 Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
En esta etapa prima más esperar el momento de la suelta y llegar a él con suficiente velocidad, para
que cuando se libere el cable, se pueda convertir la energía cinética en algunos metros más de altura.
Suelta
Como se ha mencionado anteriormente, el cable lleva un sistema automático de liberación. Aun así,
es mandatorio que el piloto una vez el cable se suelte, compruebe repetidamente que el cable está
suelto, accionando él mismo, el sistema de suelta
4.3 Conclusiones y objetivos de mejora
Una vez planteado y descrito todo el sistema de lanzamiento por torno y cumplido por tanto el
primero de los objetivos de este estudio, es hora de extraer las conclusiones y plantear alguna mejora
que pueda ayudar a la optimización del sistema completo.
La primera conclusión que se extrae del estudio realizado es que tanto la seguridad como la
operación del sistema son a día de hoy muy vulnerables a la experiencia de las personas involucradas
en el lanzamiento. Es decir, tanto tornero como piloto deben poseer bastante experiencia en el campo
para poder asegurar un lanzamiento seguro además de eficiente.
En cuanto a seguridad, el mayor problema es la rotura del cable (o fusible). Se explicó en el apartado
de la rotación, que sería peligroso que ocurriera una rotura de cable cuando el velero se encuentra a
muy poca distancia del terrero, ya que debido al encabritado que posee en ese instante, sería difícil
recuperar un vuelo nivelado o planeo controlado antes de llegar al suelo, aumentando por ello, la
probabilidad de sufrir un peligroso impacto. Que ocurra esto o no, dependerá exclusivamente de la
pericia tanto del tornero como del piloto. Además, no existe ningún sistema a día de hoy que aporte
información directa sobre el estado del cable en cada momento, es decir, la tensión con la que está
trabajando.
Otra de las conclusiones que se puede sacar una vez analizado el asunto, es la incertidumbre que se
tiene acerca del resultado que se puede llegar a obtener de un lanzamiento. Es decir, no se conoce a
día de hoy qué altura se puede lograr en un lanzamiento en función de los datos del velero, datos del
torno y datos atmosféricos.
En el siguiente capítulo se va a desarrollar un modelo matemático de todo el sistema con varios
objetivos. El primero será, ver de forma más clara, cualitativa y cuantitativa, que todo lo explicado
anteriormente se cumple, en cuanto a evolución de parámetros y comportamiento del velero. El
segundo de ellos será desarrollar la segunda mejora que se plantea: un calculador de actuaciones y
performances1 que resuelve el problema planteado en la última conclusión. El calculador dará los
resultados que se pueden obtener en un lanzamiento, dados los datos de entrada correspondientes.
Por otro lado, se hará un estudio de variación de las variables más importantes del problema con el
objetivo de buscar la ley óptima de vuelo en el lanzamiento.
Además, se usará el modelo desarrollado para crear un simulador que sea capaz de recrear de la
mejor forma posible un lanzamiento completo, desde el estado de reposo, hasta el momento de suelta
del cable. Este simulador serviría a los Clubes de Vela como sistema de entrenamiento
complementario a la formación que reciben, tanto tornero como piloto.
El sistema contará de una entrada física mediante Joystick, de tal forma que el piloto tenga acceso a
la palanca del velero y el tornero tenga acceso al acelerador del motor.
Por último, se implementará al modelo un controlador de tensión automático. El objetivo del mismo,
será mostrar evidencias de que sería posible, la implementación en este deporte de tornos capaces de
1 Perfomances: Estudio de la operación de una aeronave representando la evolución de las variables más importantes que la definen.

Análisis de Sistemas Tradicionales de Operación
28
28
controlar la tensión del lanzamiento en todo momento y fijarla al valor deseado. Este sistema
supondría la eliminación de la necesidad de experiencia de los torneros en los lanzamientos, factor
crítico, como se ha mencionado con anterioridad.
Además de todo lo comentado, se comentará la posibilidad del aporte de instrumentación extra al
operador de torno. A día de hoy, como se ha explicado, el operador de torno no conoce el estado del
cable a lo largo del lanzamiento. Por otro lado, la velocidad aerodinámica del velero tampoco es una
variable conocida directamente por él.
Se propondrá aportar instrumentación extra al operador de torno, para tener una realimentación
directa y clara sobre las variables más críticas en el lanzamiento de los veleros como son la tensión
del cable y la velocidad a la que vuela la aeronave.

29
5 MODELADO DEL SISTEMA
n este capítulo vamos a plantear un modelo matemático que se acerque lo mejor posible al
sistema real de estudio. El modelo matemático servirá para resolver numéricamente el
problema. Éste, nos dará datos como la trayectoria del lanzamiento, altura final conseguida,
cargas soportadas por el piloto o tiempo total desde el despegue hasta la suelta del cable.
Por un lado, se hará el estudio del sistema completo, que servirá para el análisis general del
funcionamiento del sistema además de hacer de base del desarrollo del simulador de lanzamientos.
Por otro lado, en el final del capítulo se hará la hipótesis de modelo a velocidad y tensión constantes,
que además de servir para entender de manera más sencilla el funcionamiento del sistema, será la
base del calculador de performances.
5.1 Hipótesis de partida
Como todo modelo matemático, se deben establecer unas hipótesis de partida para facilitar el
problema, justificando que estas simplificaciones no afectan de forma considerable al
comportamiento del sistema.
Las hipótesis establecidas en este modelado son las siguientes:
Ecuaciones de Mecánica del Vuelo Simétrico en Plano Vertical.
Se supone la dependencia de resistencia y sustentación del velero como una Polar Parabólica
de coeficientes constantes, no dependen ni del Mach de vuelo ni del número de Reynols.
Variables atmosféricas según modelo ISA.
Viento según gradiente vertical de Hellmann.
Cable considerado como curva catenaria sometida a gravedad pero no a resistencia
aerodinámica.
Motor diésel.
Mapa de motor conocido.
5.2 Modelado de la atmósfera
Para modelar la atmósfera se usará como se ha indicado en el apartado anterior el modelo ISA1. Este
modelo aporta información de la temperatura, densidad, presión o viscosidad del aire en función de
la altitud. Este modelo establece una serie de franjas de altitud en las que la temperatura varía
linealmente. En concreto, en la troposfera2, el gradiente de temperatura está establecido en
6,5 /a K km . Las ecuaciones que presenta este modelo son las siguientes:
0 0( ) ( )T h T a h h , (5.1)
1 ISA: International Standard Atmosphere. 2 Troposfera: Nivel de la atmósfera que va desde altitud cero hasta aproximadamente 11 km.
E

Modelado del Sistema
30
30
0
0
( )( ) ( )
g
aRT h
p h pT
, (5.2)
0
0
1( )( ) ( )
g
aRT h
hT
, (5.3)
donde 0 0 0, ,h p y 0T son los valores a nivel del mar.
Además de la definición de estas variables, se necesita modelar el viento en el campo de vuelo. Para
ello se recurre al modelo de gradiente de viento de Hellmann [2], quien propuso un perfil de viento
semejante al de una capa límite y en dependencia con la rugosidad e irregularidad del terreno.
El modelo establece que la velocidad del viento depende de la altura de forma exponencial siendo la
expresión como sigue:
0 0
( )a
v h h
v h
(5.4)
Donde 0v es la velocidad a la altura 0h , normalmente a 10 metros y a es un coeficiente que
depende del tipo de terreno.
Tabla 5-1 Valores del exponente de Hellman en función de la rugosidad del terreno
Tipo de Terrenos 𝑎
Lugares llanos con hielo o hierba 0,08 ÷ 0,12
Lugares llanos (mar, costa) 0,14
Terrenos poco accidentados 0,13 ÷ 0,16
Zonas rústicas 0,2
Terrenos accidentados o bosques 0,2 ÷ 0,26
Terrenos muy accidentados y ciudades 0,26 ÷ 0,4
Figura 5—1 Perfil de Gradiente de Viento de Hellmann para varios Terrenos
Debido a que los veleros usualmente despegan en zonas llanas y con hierba en los alrededores, se
elige el valor 0,10a para el modelo. De esta forma, se puede representar como quedaría el perfil
de viento suponiendo que a la altura de 10 metros se tiene una velocidad del viento de 18 km/h.

31
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 5—2 Modelo de Perfil de Viento del Problema
5.3 Modelado del avión
Se modela ahora el sistema clave de estudio, que es en sí, el velero, junto con el cable que le aporta
velocidad. Para ello, el primer paso es considerar el esquema de fuerzas que actúan sobre el sistema
en cualquier instante de tiempo y con el velero en vuelo. Suponiendo el velero como un punto en el
plano vertical, el planteamiento es el siguiente.
Figura 5—3 Esquema del Sistema Velero-Cable
0
50
100
150
200
250
300
350
400
450
500
550
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
Alt
ura
(m
)
Velocidad (km/h)
Perfil de Velocidad del Viento de Hellmann

Modelado del Sistema
32
32
Las variables que aparecen en el problema son las que aparecen en la siguiente tabla.
Tabla 5-2 Conjunto de variables del problema avión-cable
Variable Unidades Significado Físico
L N Sustentación
D N Resistencia aerodinámica
V m/s Velocidad aerodinámica
m kg Masa del velero
T N Tensión del cable
R m Longitud del cable
rad Ángulo de asiento de la velocidad aerodinámica
rad Ángulo de elevación del cable
x m Alcance del velero
h m Altura del velero
w m/s Velocidad del viento
g m/s2
Gravedad
LC - Coeficiente de sustentación
DC - Coeficiente de resistencia
0DC - Coeficiente de resistencia parásita
k - Constante de la polar parabólica
n - Factor de carga
De la tabla anterior, todas las variables serán incógnitas del problema, salvo la gravedad, la masa, la
velocidad del viento, el coeficiente de resistencia parásita y la constante de la polar parabólica que se
suponen como datos desde el principio.
Para modelar todo el sistema, se usarán para empezar, las ecuaciones de movimiento de vuelo
simétrico en el plano vertical que se pueden encontrar en los apuntes de Mecánica del Vuelo I [3],
asignatura impartida en el Grado de Ingeniería Aeroespacial. Las ecuaciones que rigen este
movimiento son las siguientes:
cosdx
w Vdt
(5.5)
sindh
Vdt
(5.6)
cos sindV
m T D mgdt
(5.7)
sin cosd
mV T L mgdt
(5.8)
Además, el modelo aerodinámico del velero es el siguiente:
21
2LL V SC (5.9)
21
2DD V SC (5.10)
0
2( )D L D LC C C kC (5.11)
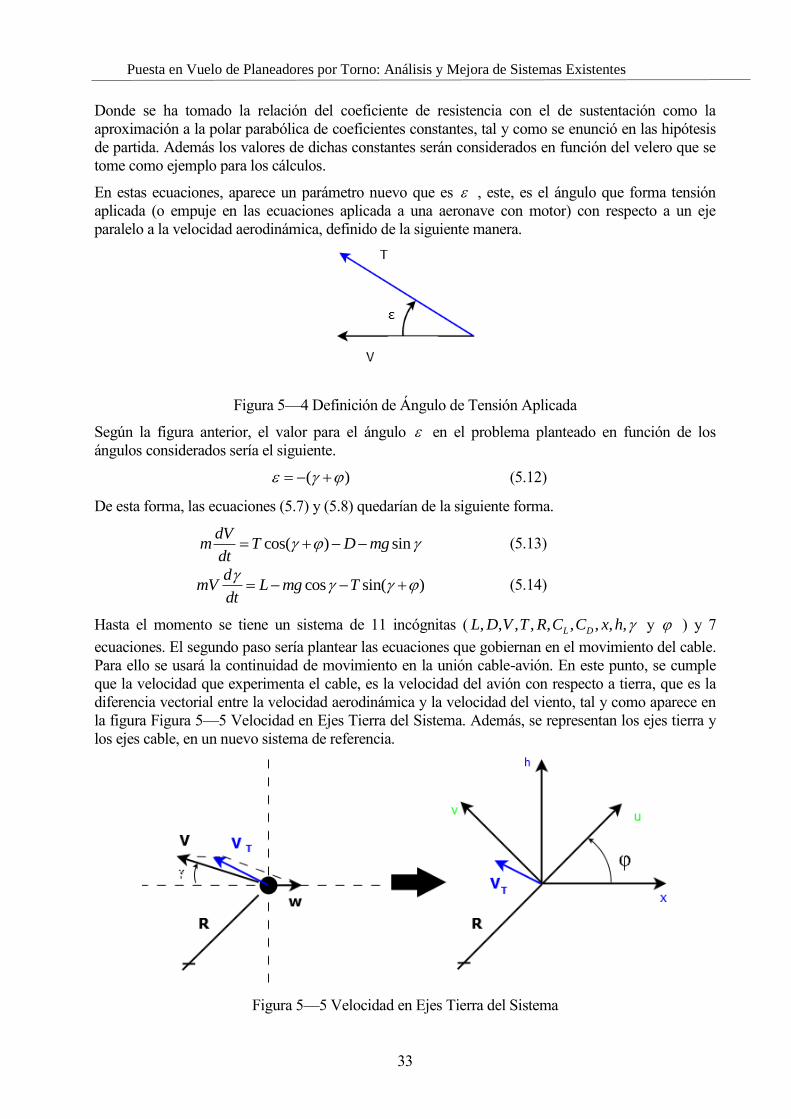
33
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Donde se ha tomado la relación del coeficiente de resistencia con el de sustentación como la
aproximación a la polar parabólica de coeficientes constantes, tal y como se enunció en las hipótesis
de partida. Además los valores de dichas constantes serán considerados en función del velero que se
tome como ejemplo para los cálculos.
En estas ecuaciones, aparece un parámetro nuevo que es , este, es el ángulo que forma tensión
aplicada (o empuje en las ecuaciones aplicada a una aeronave con motor) con respecto a un eje
paralelo a la velocidad aerodinámica, definido de la siguiente manera.
Figura 5—4 Definición de Ángulo de Tensión Aplicada
Según la figura anterior, el valor para el ángulo en el problema planteado en función de los
ángulos considerados sería el siguiente.
( ) (5.12)
De esta forma, las ecuaciones (5.7) y (5.8) quedarían de la siguiente forma.
cos( ) sindV
m T D mgdt
(5.13)
cos sin( )d
mV L mg Tdt
(5.14)
Hasta el momento se tiene un sistema de 11 incógnitas ( , , , , , , , , ,L DL D V T R C C x h y ) y 7
ecuaciones. El segundo paso sería plantear las ecuaciones que gobiernan en el movimiento del cable.
Para ello se usará la continuidad de movimiento en la unión cable-avión. En este punto, se cumple
que la velocidad que experimenta el cable, es la velocidad del avión con respecto a tierra, que es la
diferencia vectorial entre la velocidad aerodinámica y la velocidad del viento, tal y como aparece en
la figura Figura 5—5 Velocidad en Ejes Tierra del Sistema. Además, se representan los ejes tierra y
los ejes cable, en un nuevo sistema de referencia.
Figura 5—5 Velocidad en Ejes Tierra del Sistema

Modelado del Sistema
34
34
La velocidad TV es la velocidad del sistema con respecto a tierra que por el momento está expresada
en el sistema de referencia de tierra (ejes x e y ) y tiene el valor:
cos
sin
x
T
h
V w VV
V V
(5.15)
Para obtener las ecuaciones de movimiento del cable, conviene tener esta magnitud expresada en el
nuevo sistema de referencia, visto desde el propio cable. Para ello se usa una matriz de giro en dos
dimensiones tal y como se muestra a continuación.
C T
C TV L V (5.16)
siendo la matriz de giro,
cos sin
sin cos
C TL
(5.17)
por lo que, desarrollando queda,
cos sin ( cos )cos sin sin
sin cos ( cos )sin sin cos
(sin sin cos cos ) cos cos cos( )
(sin cos cos sin ) sin sin( )
u
C
x
h
u
C
v
v
V V w V VV
V V w V V
VV w w VV
VV w V
sinw
(5.18)
En el último paso se ha usado la relación trigonométrica del seno y coseno de la suma de ángulos.
Las componentes de la velocidad del cable se ven gráficamente en la siguiente figura.
Figura 5—6 Velocidad en Ejes Cable
De la gráfica anterior, una vez pasada la velocidad a ejes cable, se pueden establecer las ecuaciones
de movimiento del cable tal y como sigue:
vVd
dt R
(5.19)

35
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
u
dRV
dt (5.20)
donde, haciendo uso de las expresiones resultantes de (5.18), las ecuaciones quedarían:
sin( ) sind
R V wdt
(5.21)
cos cos( )dR
w Vdt
(5.22)
En resumen, las ecuaciones (5.5),(5.6),(5.9),(5.10),(5.11),(5.13),(5.14),(5.21) y (5.22) forman un
sistema de ecuaciones diferenciales ordinarias de 9 ecuaciones y 11 variables dependientes. Además
6 de las variables son derivadas (variables de estado) y 5 variables no derivadas. Para cerrar el
problema se necesitan dos variables de control. Solo de esta forma, el problema tendría solución.
Las variables de control que de forma natural resultarían más evidentes en el sistema, quedan
reflejadas en la siguiente tabla. Solo serían necesaria dos de ellas.
Tabla 5-3 Variables de control del problema
Variable de Control Tipo de Control
LC Control del Piloto
T Control de Torno
dR
dt Control de Torno
Se explica con más detalle el porqué de la elección de estas variables.
Coeficiente de Sustentación
Este parámetro está relacionado directamente con el piloto ya que, se puede demostrar, cómo dicho
coeficiente depende directamente de la posición de la palanca que en cada momento use el piloto que
controla la aeronave. La relación que existe es la siguiente:
0 e
L L l l eC C C C (5.23)
Donde el factor lC es el coeficiente de sustentación asociado al ángulo de ataque
1 y
el eC es el
coeficiente de sustentación asociado a la deflexión del elevador e .
Que el piloto actúe sobre la palanca de mandos, influye directamente en la deflexión del elevador.
Debería de ser pues, esta deflexión, la variable de control del problema. Sin embargo, este nivel de
detalle, corresponde al estudio del problema dinámico de estabilidad longitudinal del avión, distinto
al de actuaciones de punto que se ha considerado en este trabajo. Es por ello que se tome el
coeficiente de sustentación total como posible variable de control del problema, siendo este, la
variable más dependiente de la mencionada deflexión del elevador. Se desconoce por tanto, la
relación que existe entre el movimiento en grados de la palanca y la variación del coeficiente de
sustentación. Esto último, no influirá en el correcto estudio del problema.
Tensión del Cable
Esta propuesta variable de control es la fuerza que el cable actuado por el torno, le aplica
directamente al velero, que dependerá del par que esté aplicando el motor del torno en cada momento
1 Ángulo de ataque: ángulo con el que incide el viento relativo en una aeronave con respecto al eje longitudinal.

Modelado del Sistema
36
36
y este a su vez, de la potencia que el tornero esté suministrando al torno. Es por ello que se considera
como variable de control asociada a la actuación del operador de torno.
Velocidad de recogida del cable
Esta variable al igual que la anterior, está asociada al operador de torno pero esta vez, teniendo en
cuenta la velocidad con la que el cable se recoge en la bobina del torno, que dependerá a su vez de
las RPM1 en las que el operador de torno esté solicitando al motor.
En resumen, como variables de control para la resolución del sistema avión y cable se podrán tener
dos de las tres variables mencionadas.
5.3.1 Sistema de ecuaciones con entrada tensión de cable
El sistema de ecuaciones completo de 9 ecuaciones, se puede dividir en dos grupos, ecuaciones no
diferenciales y ecuaciones diferenciales. Las primeras pertenecen al modelo aerodinámico. Estas,
podrían sustituirse en el grupo de ecuaciones diferenciales ordinarias (EDO), quedando de esta forma
un sistema formado por 6 ecuaciones definidas y de 6 variables dependientes y 2 variables de
control.
Este sistema por tanto, para el caso de entrada tensión del cable, quedaría de la siguiente forma:
( , , )Lf C T (5.24)
Donde es el vector de estado siguiente:
V R x h (5.25)
5.3.2 Sistema de ecuaciones con entrada velocidad del cable
Para el caso de la entrada velocidad del cable, además de sustituir el modelo aerodinámico en las
ecuaciones diferenciales2, se deben hacer algunas variaciones en la estructura del sistema y sus
ecuaciones con el objetivo de facilitar su resolución.
Debido a que se tiene como dato dR
dt, dejaría de tener sentido tener esa ecuación diferencial como
tal. Se decide pues, derivar la expresión (5.22), quedando:
sin cos( ) sin( )( )R w V V (5.26)
El objetivo de dicha derivación, es simplemente, usarlo como herramienta matemática para hacer
aparecer en la ecuación la derivada de la velocidad, una de las variables de estado de estudio.
Además se despeja la variable de la tensión de la ecuación (5.13)
1
sincos( )
T D mg mV
(5.27)
y se sustituye en la (5.14)
cos tan( ) sin tan( ) tan( )mV L mg D mg mV (5.28)
Con estos cambios, se elimina la ecuación (5.13) del sistema EDO y se reduce el problema a 5
ecuaciones con 7 incógnitas3, que una vez resuelto, daría posibilidad a calcular el resto de variables
1 RPM: Revoluciones por minuto del eje de potencia del motor del torno. 2 Por comodidad y evitar extensiones en las expresiones no se ha sustituido las ecuaciones en el texto. 3 Nótese que aunque aparezca la nueva variable de la aceleración del cable, esta sigue siendo dato, al serlo la velocidad.

37
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
del problema, las del modelo aerodinámico y la tensión. Las ecuaciones que forman el sistema EDO
en este caso son las ecuaciones (5.28), (5.21), (5.26), (5.5) y (5.6).
Este sistema quedaría por tanto de la forma siguiente:
A B (5.29)
donde en este caso las matrices A y B , son matrices que dependen a su vez del vector de estado:
V x h (5.30)
y de las variables de control LC y R (calculada a partir de R ).
Las matrices quedan definidas como:
tan( ) 0 0 0
0 0 0 0
cos( ) sin( ) sin sin( ) 0 0
0 0 0 1 0
0 0 0 0 1
m mV
R
A V w V
(5.31)
y
cos sin tan( ) tan( )
sin( ) sin
cos
sin
L mg mg D
V w
B R
w V
V
(5.32)
Este sistema será el que se usará de aquí en adelante. La solución tiene la siguiente forma:
1
A B
(5.33)
5.3.3 Modelado del avión durante el rodaje
Aunque no se ha comentado nada hasta el momento, no sería cierto afirmar, que el conjunto de
ecuaciones anteriormente descritas rigen el lanzamiento del velero en todo momento. De hecho, en el
tramo del rodaje o despegue, estas ecuaciones no son válidas y se considera necesario desarrollar un
nuevo sistema de ecuaciones exclusivo para este tramo del lanzamiento.
Se podría hacer la suposición de que el lanzamiento comienza con el velero en vuelo, pero debido a
la no complejidad de las ecuaciones a desarrollar se decide implementarlas, además, esto dotará al
cálculo de mayor acercamiento a la realidad.
En este tramo se tiene un movimiento rectilíneo acelerado cuyas ecuaciones son las siguientes:
dx
w Vdt
(5.34)
0dh
dt (5.35)
dV
Rdt
(5.36)

Modelado del Sistema
38
38
r a
dVT D m F F
dt (5.37)
0d
dt
(5.38)
0d
dt
(5.39)
Por tanto, el bloque de cálculo de variaciones tendrá dos tramos. Primeramente, el despegue o rodaje,
y posteriormente el tramo en vuelo, siendo este el más representativo del lanzamiento.
En el bloque de ecuaciones anterior, aparecen dos nuevas fuerzas. Por un lado, rF es la fuerza de
rodadura debido al tren de aterrizaje del velero. Por otro lado, aF es la fuerza de arrastre que genera
el cable al estar deslizando por el suelo. Se calculan de la siguiente forma:
r rF C W (5.40)
a r cF R (5.41)
Donde el valor rC es el coeficiente de rodadura que multiplicado por el peso del velero da como
resultante la fuerza de rodadura. El valor r es el coeficiente de rozamiento del cable usado en
contacto con el suelo, que multiplicado por la longitud en cada momento del mismo y por la
densidad lineal del velero, da como resultado la fuerza de arrastre del cable. Los valores de dichos
coeficientes que dependen de la naturaleza de los elementos que intervienen en el problema son los
siguientes.
Tabla 5-4 Coeficientes para fuerzas arrastre y rodadura
Variable de Control Valor
rC 0,0055
r 0,2
5.4 Modelado del motor-torno
Para acercar el estudio a la realidad se estudiará además un modelo matemático para simular el
funcionamiento del sistema motor-torno. Para ello se parte de un motor diésel del que se conoce su
mapa de motor1.
Antes de plantear el modelo ha de tenerse en cuenta cuales deben ser las variables de salida del
mismo. El objetivo final es poder enlazar este subsistema con el desarrollado en el anterior apartado
y así tener un modelo que incluya, motor, torno, cable y velero. Por ello, lo aconsejable será, que el
modelo a desarrollar en este apartado tenga como variables de salida la velocidad y aceleración de
recogida del cable, dR
dt y
2
2
d R
dt, o la tensión del cable, T , siendo la primera la más natural de las
dos.
Como entradas del sistema motor-torno, se elegirá el control del operador de torno, el cual, es capaz
de variar la palanca que suministra más o menos combustible al motor (acelerador). Como se verá
más adelante, todas las variables del problema están relacionadas entre sí y el hecho de haber elegido
1 Mapa de motor: Relación experimental de los parámetros importantes de un motor: Par, RPM y Potencia.

39
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
la velocidad del cable como variable de salida, hace que la tensión se convierta en entrada del
mismo.
El modelo se basará en el cálculo del par motor que el motor es capaz de aportar en cada momento,
en función de la demanda de acelerador y de la curva de par, esta última en función del régimen de
vueltas en las que esté trabajando el motor.
Las variables que aparecerán en el problema se representan en la siguiente tabla.
Tabla 5-5 Conjunto variables del problema motor-torno
Variable Unidades Significado Físico
- Acelerador
M rad/s Velocidad eje motor
N r.p.m Régimen de vueltas motor
MQ N·m Par o torque motor
- Factor multiplicación
MAXQ N·m Par máximo motor
MT - Rendimiento eje transmisión
TQ N·m Par que llega al torno
RQ N·m Par resistente
r m Radio bobina torno
T rad/s Velocidad rotación torno
T N
Tensión cable
TP W Potencia desarrollada torno
MP W Potencia desarrollada motor
TI
Kg·m2
Inercia del torno a rotación
El esquema es el siguiente:
Figura 5—7 Esquema Sistema Motor-Torno
El sistema se compone de dos bloques, el primero es el bloque motor. Las entradas del mismo son la
posición del acelerador y las revoluciones en las que esté operando en dicho momento, el eje
principal del torno. Mediante el mapa motor, supuesto conocido, se podrá calcular el par motor, que
MOTOR
TO
RN
O

Modelado del Sistema
40
40
se genera en cada instante. Además, se debe resaltar que se supone respuesta inmediata del motor. Es
decir, el par generado por el motor es instantáneo, por lo que no tiene retardo temporal como si lo
tendría un conjunto motor real, debido al propio mecanismo o a la combustión de la mezcla.
Antes del sistema torno, se encuentra la transmisión y caja de reducción, donde se contará con el
factor de multiplicación correspondiente. Además, la caja reductora tiene un rendimiento, que hace
que se pierda parte de la potencia que genera el motor.
El bloque torno tiene la entrada par motor, una vez pasado por la caja reductora y a su vez, el que se
llamará, par resistente. Este último, es el debido a la tensión aplicada en el cable en cada momento,
multiplicada por el radio de la bobina del torno. El resultado, como se dijo anteriormente, será la
velocidad de rotación del torno, o haciendo los cálculos pertinentes, la velocidad de recogida del
cable. La variable de salida dependerá en último lugar, de la inercia del sistema bobina y cable
enrollado.
Las ecuaciones que gobiernan lo expresado anteriormente son las siguientes.
Motor
( )M MAXQ Q N (5.42)
1
602
MN
(5.43)
M T (5.44)
M M MP Q (5.45)
donde ( )MAXQ N es el valor del par máximo para el régimen de vueltas, N , extraído de la curva del
par motor en función del régimen. Se ha hecho la suposición de que el par motor tiene dependencia
lineal con el par máximo en cada régimen a través de un factor, el acelerador. Este factor irá de cero
a uno, siendo el valor cero el que se tendría con el motor en régimen de ralentí y uno el que se tendría
a máximo par. A su vez, MP , es la potencia que desarrolla el motor que servirá para calcular el par
suministrado al torno.
Torno
T MT MP P (5.46)
T T TP Q (5.47)
RQ T r (5.48)
TT
dQ I
dt
(5.49)
TddRr
dt dt
(5.50)
Estas 8 ecuaciones y las 10 variables incógnitas , , , , , , , , ,M M T R T T MN Q Q Q P P T forman el sistema
de ecuaciones que define el funcionamiento del sistema motor-torno. Para su resolución, serán
necesarias dos variables de control. Como ya se adelantó en el comienzo del apartado, las variables
de control o variables de entrada para cerrar el problema, serán la tensión que tiene el cable en cada
momento y la posición de palanca del operador de torno, acelerador.
El resto de parámetros que aparecen en las ecuaciones se suponen conocidos, como el factor de
multiplicación, par máximo (sacado de la curva par-régimen), radio de la bobina, rendimiento del
eje de transmisión o inercia del torno. Este último al ser menos trivial, se explicará su cálculo a
continuación.
Para calcular la inercia del torno se superponen las inercias que aportan por un lado la bobina del
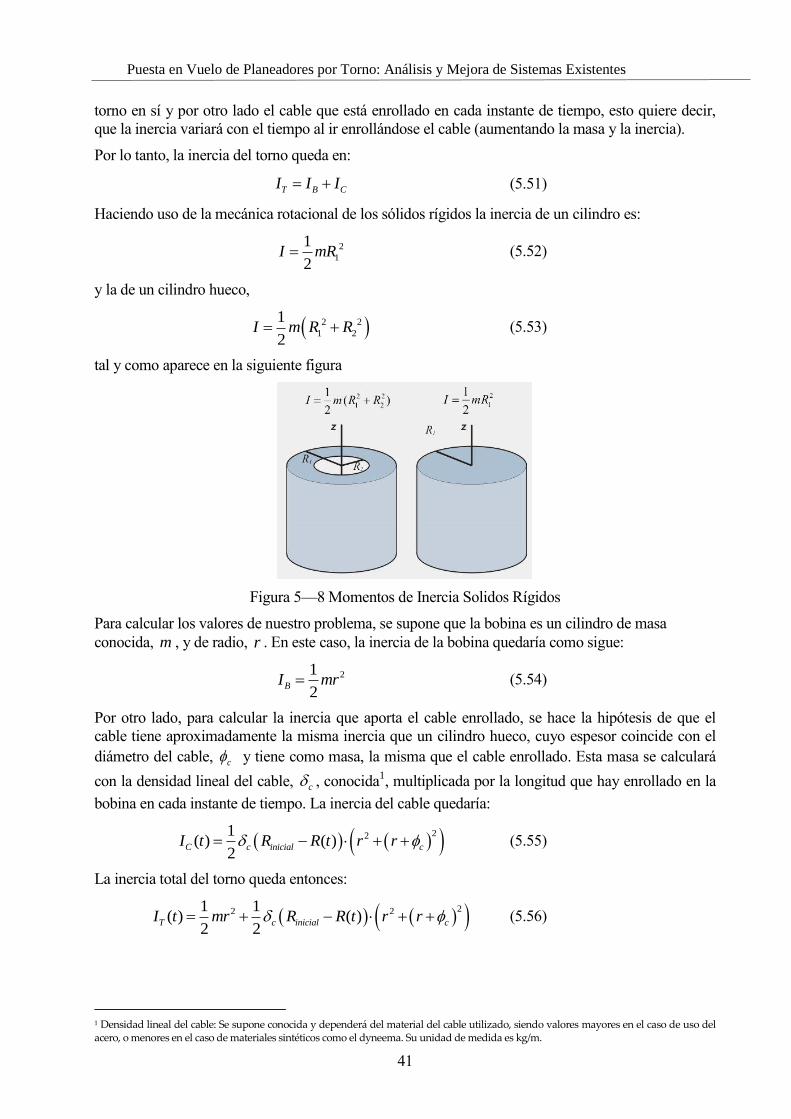
41
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
torno en sí y por otro lado el cable que está enrollado en cada instante de tiempo, esto quiere decir,
que la inercia variará con el tiempo al ir enrollándose el cable (aumentando la masa y la inercia).
Por lo tanto, la inercia del torno queda en:
T B CI I I (5.51)
Haciendo uso de la mecánica rotacional de los sólidos rígidos la inercia de un cilindro es:
2
1
1
2I mR (5.52)
y la de un cilindro hueco,
2 2
1 2
1
2I m R R (5.53)
tal y como aparece en la siguiente figura
Figura 5—8 Momentos de Inercia Solidos Rígidos
Para calcular los valores de nuestro problema, se supone que la bobina es un cilindro de masa
conocida, m , y de radio, r . En este caso, la inercia de la bobina quedaría como sigue:
21
2BI mr (5.54)
Por otro lado, para calcular la inercia que aporta el cable enrollado, se hace la hipótesis de que el
cable tiene aproximadamente la misma inercia que un cilindro hueco, cuyo espesor coincide con el
diámetro del cable, c y tiene como masa, la misma que el cable enrollado. Esta masa se calculará
con la densidad lineal del cable, c , conocida1, multiplicada por la longitud que hay enrollado en la
bobina en cada instante de tiempo. La inercia del cable quedaría:
221( ) ( )
2C c inicial cI t R R t r r (5.55)
La inercia total del torno queda entonces:
22 21 1( ) ( )
2 2T c inicial cI t mr R R t r r (5.56)
1 Densidad lineal del cable: Se supone conocida y dependerá del material del cable utilizado, siendo valores mayores en el caso de uso del acero, o menores en el caso de materiales sintéticos como el dyneema. Su unidad de medida es kg/m.

Modelado del Sistema
42
42
5.5 Modelado del cable
El cable en el sistema de lanzamiento por torno tiene un papel clave, ya que debido a su extensa
longitud, provoca una penalización en todos los sentidos al resultado del problema. Es por ello que se
decide realizar un modelo del mismo, con el objetivo de calcular en qué medida puede penalizar el
cable al sistema de estudio.
Para su modelado se usa la ecuación de la catenaria, que es la ecuación que define la curvatura de
una cuerda apoyada por sus dos extremos, sometida a una tensión en el plano horizontal y a la fuerza
gravitatoria.
La ecuación de la catenaria viene dada por la siguiente expresión [4]:
22
21c
H
d y dy
dx T dx
(5.57)
Donde c es la densidad lineal del cable ya definida en el apartado anterior y HT , es la componente
horizontal de la tensión del cable en los extremos.
La ecuación anterior tiene la siguiente solución:
1 2( ) cosh cH
c H
Ty x x C C
T
(5.58)
Donde las constantes 1C y 2C se determinarán con las condiciones de contorno en ambos extremos
del cable. Esta ecuación se resuelve numéricamente mediante una función desarrollada en Matlab
expresada en el ANEXO A. La siguiente figura muestra varias soluciones de la catenaria para valores
típicos del problema planteado y varios valores de densidad lineal.
Figura 5—9 Curva Catenaria Para Varios Cables
Haciendo un zoom en la zona más cercana al velero, se puede observar con mayor detalle cómo
afecta la gravedad en cada uno de los cables.
0
50
100
150
200
250
300
0 200 400 600 800 1000
Alt
ura
(m
)
Alcance (m)
Comparación Cable Ideal y Real
Cable Ideal
δc = 0.008 Kg/m
δc = 0.077 Kg/m
δc = 0.2 Kg/m
δc = 0.5 Kg/m
Trayectoria

43
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 5—10 Curva Catenaria Para Varios Cables, Zona Velero
Como era de esperar, se observa como la curvatura del cable aumenta a medida que sube la densidad
lineal.
En la siguiente imagen se representa la diferencia de ángulos en el punto de amarre con el velero,
entre los cables reales e ideales para el caso del cable de acero 0,077c y del cable de Dyneema
0,008c . Esta diferencia se representa en función de la elevación del cable, es decir, se muestra la
diferencia entre los dos modelos de cables con el ideal en todo instante del lanzamiento del velero.
Figura 5—11 Diferencia Angular Entre el Cable Real y el Ideal
Se obtiene como resultado que la diferencia máxima entre usar el modelo real y el modelo ideal es de
1 grado en el caso más desfavorable (cable de acero). Lo interesante será ver qué supone esta
diferencia en los resultados del problema, en cuanto a altura conseguida por ejemplo. Para poder
hacer el estudio de la influencia en el problema y no tener que calcular una catenaria en cada instante
de tiempo, se introduce el efecto del cable como una penalización en el ángulo de elevación del
cable. Para ir al caso más desfavorable, se tomará para cada cable, el valor máximo de la diferencia
en todo el lanzamiento y se sumará a la elevación del cable en cada instante para así introducir la
penalización. En la siguiente figura se observa la influencia.
230
235
240
245
250
255
260
265
270
600 620 640 660 680 700
Alt
ura
(m
)
Alcance (m)
Comparación Cable Ideal y Real
Cable Ideal
δc = 0.008 Kg/m
δc = 0.077 Kg/m
δc = 0.2 Kg/m
δc = 0.5 Kg/m
Trayectoria
0
0,2
0,4
0,6
0,8
1
1,2
0 20 40 60 80 100
Dif
ere
nci
a (°
)
Elevación Cable (°)
Diferencia Cables Real-Ideal
Cable Acero
Cable Dyneema
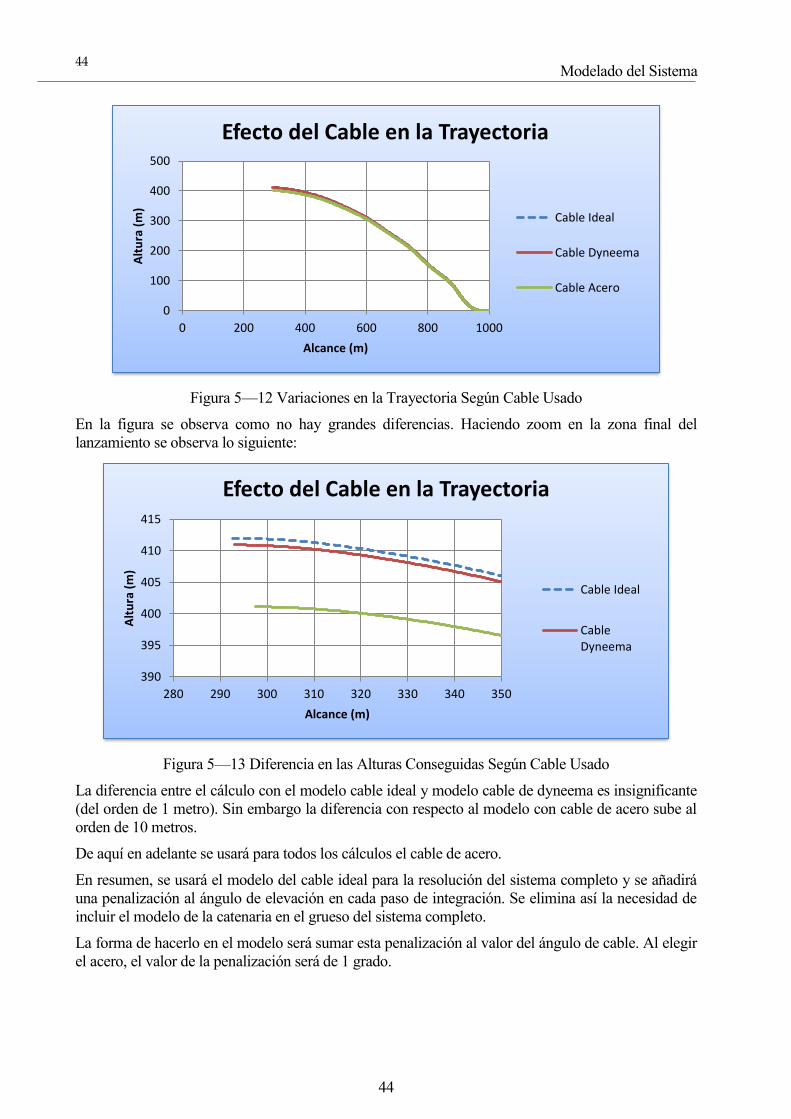
Modelado del Sistema
44
44
Figura 5—12 Variaciones en la Trayectoria Según Cable Usado
En la figura se observa como no hay grandes diferencias. Haciendo zoom en la zona final del
lanzamiento se observa lo siguiente:
Figura 5—13 Diferencia en las Alturas Conseguidas Según Cable Usado
La diferencia entre el cálculo con el modelo cable ideal y modelo cable de dyneema es insignificante
(del orden de 1 metro). Sin embargo la diferencia con respecto al modelo con cable de acero sube al
orden de 10 metros.
De aquí en adelante se usará para todos los cálculos el cable de acero.
En resumen, se usará el modelo del cable ideal para la resolución del sistema completo y se añadirá
una penalización al ángulo de elevación en cada paso de integración. Se elimina así la necesidad de
incluir el modelo de la catenaria en el grueso del sistema completo.
La forma de hacerlo en el modelo será sumar esta penalización al valor del ángulo de cable. Al elegir
el acero, el valor de la penalización será de 1 grado.
0
100
200
300
400
500
0 200 400 600 800 1000
Alt
ura
(m
)
Alcance (m)
Efecto del Cable en la Trayectoria
Cable Ideal
Cable Dyneema
Cable Acero
390
395
400
405
410
415
280 290 300 310 320 330 340 350
Alt
ura
(m
)
Alcance (m)
Efecto del Cable en la Trayectoria
Cable Ideal
CableDyneema
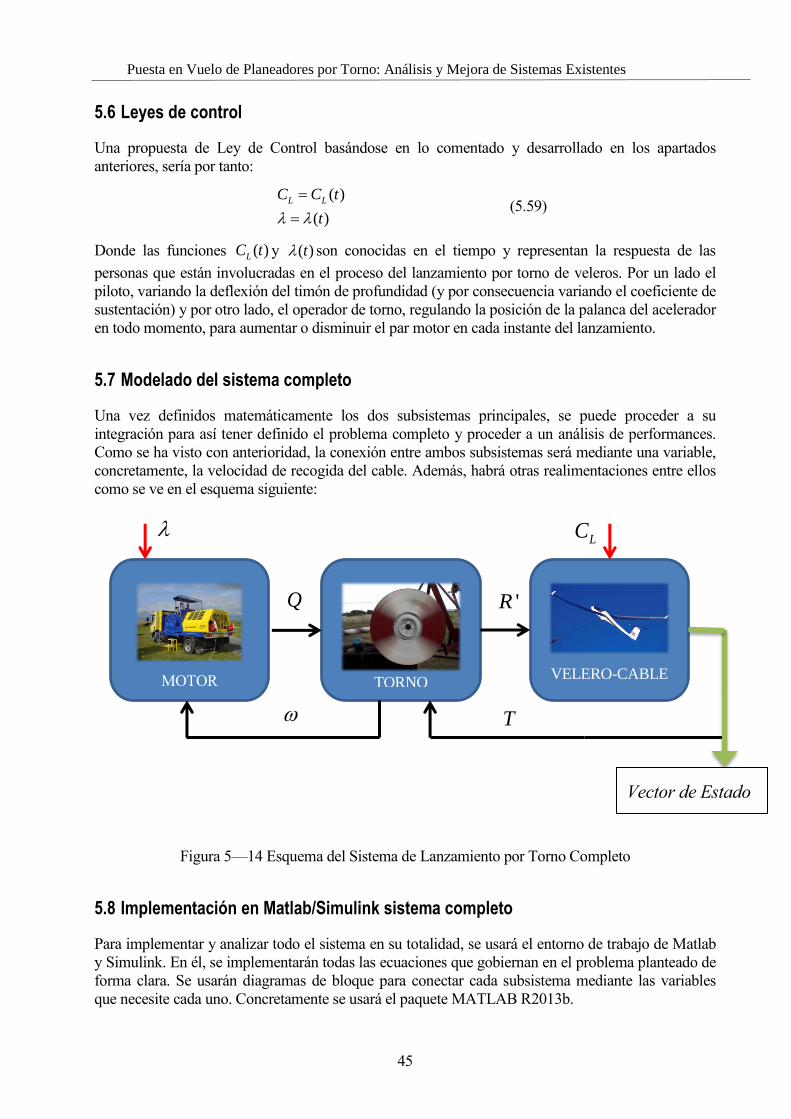
45
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
5.6 Leyes de control
Una propuesta de Ley de Control basándose en lo comentado y desarrollado en los apartados
anteriores, sería por tanto:
( )
( )
L LC C t
t
(5.59)
Donde las funciones ( )LC t y ( )t son conocidas en el tiempo y representan la respuesta de las
personas que están involucradas en el proceso del lanzamiento por torno de veleros. Por un lado el
piloto, variando la deflexión del timón de profundidad (y por consecuencia variando el coeficiente de
sustentación) y por otro lado, el operador de torno, regulando la posición de la palanca del acelerador
en todo momento, para aumentar o disminuir el par motor en cada instante del lanzamiento.
5.7 Modelado del sistema completo
Una vez definidos matemáticamente los dos subsistemas principales, se puede proceder a su
integración para así tener definido el problema completo y proceder a un análisis de performances.
Como se ha visto con anterioridad, la conexión entre ambos subsistemas será mediante una variable,
concretamente, la velocidad de recogida del cable. Además, habrá otras realimentaciones entre ellos
como se ve en el esquema siguiente:
Figura 5—14 Esquema del Sistema de Lanzamiento por Torno Completo
5.8 Implementación en Matlab/Simulink sistema completo
Para implementar y analizar todo el sistema en su totalidad, se usará el entorno de trabajo de Matlab
y Simulink. En él, se implementarán todas las ecuaciones que gobiernan en el problema planteado de
forma clara. Se usarán diagramas de bloque para conectar cada subsistema mediante las variables
que necesite cada uno. Concretamente se usará el paquete MATLAB R2013b.
MOTOR TORNO
VELERO-CABLE
Q
'R
T
LC
Vector de Estado
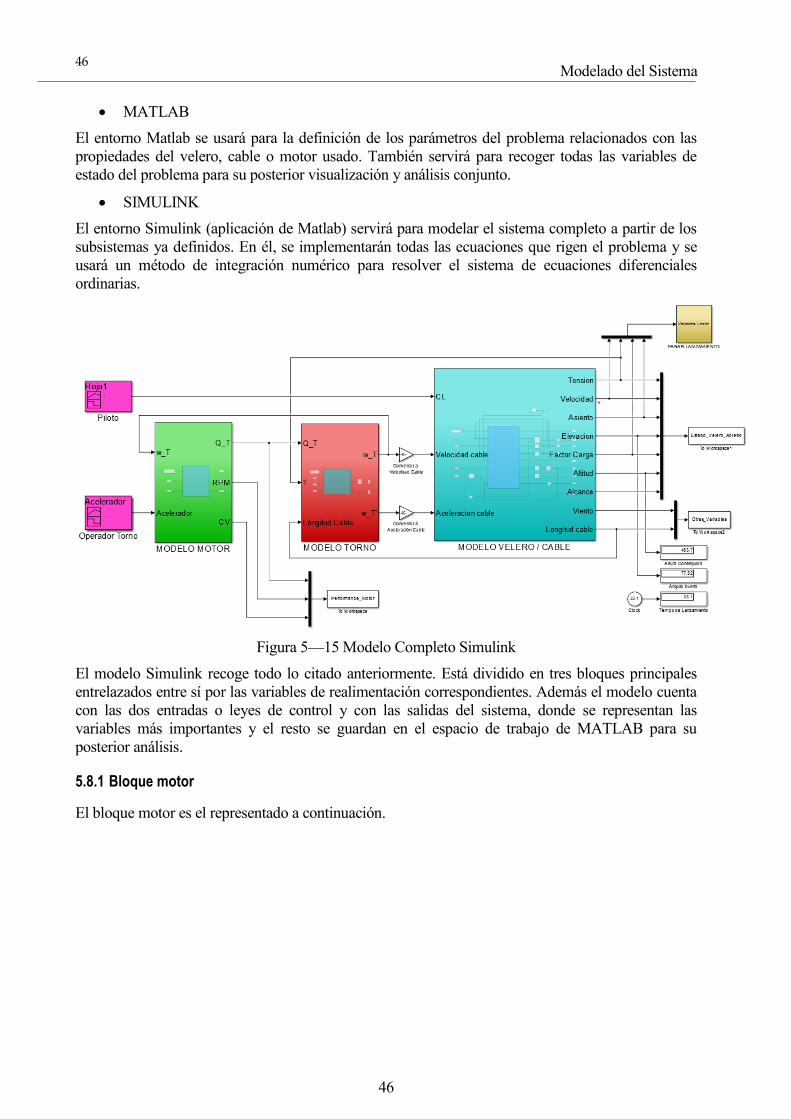
Modelado del Sistema
46
46
MATLAB
El entorno Matlab se usará para la definición de los parámetros del problema relacionados con las
propiedades del velero, cable o motor usado. También servirá para recoger todas las variables de
estado del problema para su posterior visualización y análisis conjunto.
SIMULINK
El entorno Simulink (aplicación de Matlab) servirá para modelar el sistema completo a partir de los
subsistemas ya definidos. En él, se implementarán todas las ecuaciones que rigen el problema y se
usará un método de integración numérico para resolver el sistema de ecuaciones diferenciales
ordinarias.
Figura 5—15 Modelo Completo Simulink
El modelo Simulink recoge todo lo citado anteriormente. Está dividido en tres bloques principales
entrelazados entre sí por las variables de realimentación correspondientes. Además el modelo cuenta
con las dos entradas o leyes de control y con las salidas del sistema, donde se representan las
variables más importantes y el resto se guardan en el espacio de trabajo de MATLAB para su
posterior análisis.
5.8.1 Bloque motor
El bloque motor es el representado a continuación.

47
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 5—16 Bloque Motor Simulink
Se representa a la izquierda el bloque principal y a la izquierda lo que se encuentra en su interior.
Acorde con lo visto en los anteriores apartados, el modelo motor tiene como entradas el acelerador
(operación del tornero) y las revoluciones en el eje, con el objetivo de calcular el régimen en el que
está trabajando el motor.
Las salidas son el par motor producido y trasladado al eje del torno (pasando por la reductora), el
régimen de vueltas de operación en cada instante y la potencia desarrollada en CV1.
La performance del motor se calcula mediante una función Matlab creada dentro del modelo. El
código de la misma, se representa detalladamente en el ANEXO B.
5.8.2 Bloque torno
El bloque desarrollado para modelar el torno es el siguiente:
Figura 5—17 Bloque Torno Simulink
De igual forma, se representa a la izquierda el bloque torno principal y a la derecha lo que hay en su
interior. En este caso, vuelve a haber una función de Matlab acoplada que se encarga de hacer los
cálculos pertinentes para poder extraer la variable buscada. Esta función se describe en el ANEXO
C.
A diferencia del anterior, este bloque tiene un integrador, que servirá para pasar la variable de la
aceleración angular del eje de la bobina del torno a la velocidad. Como todo integrador, necesita una
1 CV: Caballos de Vapor. Unidad de medida de potencia.

Modelado del Sistema
48
48
condición inicial. Suponemos que el sistema parte desde el reposo por lo que la condición inicial de
este integrador es cero.
Igualmente, en línea con lo visto a lo largo de esta memoria, las entradas del subsistema torno son, la
tensión del cable, el par que se aplica desde el eje de trasmisión y además la longitud del cable en
cada instante. Este último tiene el objetivo de calcular con exactitud la cantidad de cable que se va
recogiendo en la bobina, cambiando de esta forma la inercia a la rotación del sólido del conjunto
bobina-cable.
Como variables de salida se tienen la velocidad y aceleración del cable en cada instante de tiempo.
Nótese que para cambiar de las variables de rotación en la bobina a las de cable, es necesario un
conversor, en este caso, en función del radio de la bobina utilizada.
5.8.3 Bloque velero Simulink
Este bloque es el más complejo de todos, ya que alberga todo el sistema de ecuaciones de vuelo y
cinemática del cable. El bloque Simulink es el siguiente:
Figura 5—18 Bloque Velero / Cable Simulink
Este bloque se ha diseñado en función al apartado 5.3 de esta memoria y en concreto, el 5.3.2, donde
se eligió como sistema para análisis el que tenía como entradas el coeficiente de sustentación,
proveniente directamente de la actuación de velero y por otro lado, la cinemática del cable, que la
aporta el bloque justo anterior.
Como salida, este bloque tendrá todas las variables de estado del problema, tensión, velocidad,
ángulo de asiento del velero y de elevación del cable, altitud y alcance conseguidos y otros como el
factor de carga sufrido por el piloto, el viento en función de la altura o la longitud del cable en cada
instante.
Es importante tener en cuenta, que con esta forma de resolución del sistema EDO, se tendrá como
resultado la evolución de las variables a lo largo de todo el lanzamiento y para cada instante de
tiempo, definido por el paso de integración.
El interior del bloque velero se representa a continuación:

49
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 5—19 Interior Bloque Velero / Cable Simulink
El interior del bloque se compone básicamente de una función Matlab, que calcula las variaciones de
las variables de estado y un bloque de integradores que tienen como salida las propias variables de
estado.
Recordando lo visto en el apartado 5.3.2, el sistema velero se resume a resolver el sistema matricial
de la ecuación (5.33), que da como resultado la variación para cada instante de tiempo de las
variables de estado que serán posteriormente integradas.
La función implementada se describe en su totalidad en el ANEXO D. Aun así, se explica aquí
brevemente su funcionamiento.
Primeramente, se reciben como entradas los datos característicos del problema mediante el bloque
“From Workspace”1. Este bloque contiene información sobre el velero usado (peso y datos
aerodinámicos obtenidos del cliente), propiedades del cable y bobina (diámetro, longitud, densidad
lineal, peso de la bobina) y propiedades del motor (potencia máxima, factor de reducción).
Seguidamente, la función implementada adquiere además como entrada, el vector estado actual del
sistema, cuya información, viene a modo de realimentación de los integradores del bloque. Como se
vio en la creación del sistema a resolver, el cálculo de las variaciones de cada variable, venía de
calcular un sistema matricial que a su vez dependía de las variables de estado en cada instante y de
los parámetros de control.
Además, se decide añadir como entrada, la altura del velero en cada instante para calcular las
1 Entorno de Matlab que permite almacenar datos para su uso en modelos Simulink o en cualquier otra aplicación de Matlab.

Modelado del Sistema
50
50
condiciones atmosféricas según el modelo ISA.
Dentro de la función Matlab se encuentran una serie de cálculos previos al cálculo de variaciones. El
primero de ellos, se corresponde con el cálculo de las condiciones atmosféricas que influyen en el
problema planteado, como son, la densidad y el viento. A continuación, se realizan los cálculos
correspondientes al modelo aerodinámico en función de las variables de entrada, como son, la
sustentación y resistencia aerodinámicas ( L , DC y D ) y el factor de carga n .
El factor de carga, se calcula con la expresión:
L
nW
(5.60)
El último grupo de cálculos previos se corresponde con valores que se repiten en el sistema matricial
y por comodidad, se decide calcular previamente.
Después de todos los cálculos previos se tiene el conjunto de códigos que resuelven el sistema de
estudio.
Volviendo al bloque del modelo del velero, como último grupo antes de las salidas del mismo, se
tienen el conjunto de integradores. Estos serán los encargados de integrar todas las variables de
estado para dar como resultado, el vector de estado en el instante de tiempo siguiente al anterior.
Estos valores, volverían a realimentar a la función Matlab y cerraría así el bucle de integración.
Por último, tal y como se vio en el apartado correspondiente, para incluir la penalización de usar el
modelo ideal en lugar del modelo real del cable y su catenaria, se decide añadir un factor en forma de
suma, al ángulo de elevación del velero. Este factor es el llamado “Delta_Cable”.
5.8.4 Entradas y salidas del modelo
Una vez definidos los tres bloques que componen el modelo, así como, la realimentación que existe
entre ellos, se definen en este apartado, las entradas y salidas del mismo.
Entradas del sistema
Como ya se explicó, las entradas del sistema serán las correspondientes a la propia operación de las
personas implicadas en el lanzamiento, también llamadas, leyes de control. Por un lado, el piloto, que
aplicará un determinado coeficiente de sustentación en función de la palanca de profundidad. Por
otro, el tornero, que actuará directamente sobre el acelerador del motor usado.
Figura 5—20 Entradas del Modelo

51
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
El valor en cada instante de tiempo de las señales de entrada se definirá en los apartados siguientes, y
variará según se definan las leyes de control correspondientes.
Salidas del sistema
Como salidas del sistema se tienen tres bloques principales, acoplando sensores en cada una de las
variables del problema que se considere registrar para su futuro análisis.
Por un lado, se decide recoger la performance del motor, por lo que se crea un bloque de
acumulación de datos que guarda en el “Workspace” de Matlab las variables necesarias.
Figura 5—21 Registro de Datos Motor
En concreto las variables que se registran son, el régimen de trabajo (RPM), par suministrado ( TQ ) y
potencia desarrollada en CV.
Por otro lado se recogen las variables más importantes del sistema, el vector estado del velero.
Figura 5—22 Registro de Datos Velero
Las variables registradas son las correspondientes al vector del estado además del factor de carga y
tensión del cable.
Por último, se recogen, algunas variables más del problema, como son, la longitud del cable (R) y el
perfil de viento con gradiente vertical.
Figura 5—23 Registro de otras variables
Con todo lo explicado anteriormente, queda definida la estructura del Modelo implementado en
Simulink para la resolución del sistema de estudio. Se definen a continuación, otros elementos
usados y parámetros para la correcta ejecución del sistema.

Modelado del Sistema
52
52
5.8.5 Condiciones iniciales y otros parámetros del Modelo
Una vez definido el modelo y puestos a resolver el problema, es necesario asociar al sistema de
ecuaciones diferenciales ordinarias unas condiciones iniciales para que el proceso de resolución
pueda lanzarse. Una condición inicial será necesaria para cada variable que aparezca integrada en el
sistema. A continuación se añade una tabla donde se recogen las condiciones indicadas:
Tabla 5-6 Condiciones iniciales para el arranque de la integración
Variable de estado Valor inicial Significado Físico
T 0 Bobina parte del reposo
V ( 0) ( 0)R t w h Velocidad inicial cable más viento
R ( 0)R t Longitud del cable inicial
0 Velero horizontal
0 Cable en el suelo
x ( 0)R t Longitud del cable inicial
h 0 Velero en el terreno
El método de integración del sistema EDO en Simulink ha sido ode4 (Runge-Kutta). Además, el
paso de integración elegido ha sido 0,1t .
Hay que definir por otro lado, la condición intermedia que hace que el bloque de ecuaciones
aplicable para cada instante sea las ecuaciones en aire o en vuelo. Dicha condición viene dada por la
naturaleza del problema y se da cuando la velocidad supere un valor considerado previamente y
llamado, “velocidad liftoff”1. Esta velocidad aerodinámica, será siempre superior a la de la entrada
en pérdida. La condición sería:
0LOV V h (5.61)
Si se cumple la condición, las ecuaciones serían las de rodaje, por el contrario, serían las de vuelo.
Cabe destacar que se incluye que la altura sea menor que cero. Esto se hace para asegurar que en
ningún momento del lanzamiento, con el avión en vuelo, se cambien las ecuaciones al bloque de
rodaje (por el hecho de bajar el factor de carga de la unidad), hecho que es posible que ocurra si el
piloto empuja la palanca hacia adelante consiguiendo dicho valor del factor de carga.
Para cerrar la simulación faltaría decidir el tiempo máximo de ejecución. Como a priori es imposible
saber cuándo finalizará el lanzamiento, se decide usar el sentido común. La finalización del
lanzamiento ocurre cuando tiene lugar la suelta del cable.
En un lanzamiento real, el momento de suelta del cable se realiza cuando el velero no es capaz de
conseguir más altura y es un sistema automático el que suelta el cable. Este sistema automático está
diseñado de tal forma que el cable se suelta cuando este forma con la horizontal un determinado
ángulo.
En el Modelo Simulink se decide usar un bloque, que para la simulación cuando se cumple una cierta
condición. La condición que se usará será la siguiente:
0 (5.62)
que se traduce a que el velero deje de ganar altura.
1 Velocidad LiftOff (VLO): Velocidad previamente definida a la que es seguro y recomendable comenzar el despegue. Esta velocidad, estará siempre por encima del valor de la velocidad de entrada en pérdida.

53
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Por otro lado, es necesario implementar otro bloque que pare el lanzamiento si se supera algún valor
límite durante el mismo. Las variables que tienen valores límites son: la tensión (rotura fusible), la
velocidad aerodinámica y el factor de carga máximo, estos últimos, aportados por el fabricante del
velero.
Físicamente en el modelo, el bloque que realiza esta acción es el siguiente:
Figura 5—24 Bloque Finalización del Lanzamiento
A la izquierda de representa el bloque general y a la derecha lo que se encuentra en su interior,
compuesto por los cuatro STOP1.
5.9 Modelado del sistema a velocidad constante
Se considera interesante hacer el estudio del sistema a velocidad y tensión constantes y ver cómo
cambian las ecuaciones haciendo estas suposiciones. Como se verá en el capítulo siguiente, este
modelo, ayuda a entender el funcionamiento del sistema. Además, será la base para el calculador de
performances.
Este planteamiento sería similar a suponer que el piloto del velero es capaz de seguir una velocidad
aerodinámica constante, además conocida. Además, se propone como segunda entrada del sistema la
tensión del cable, conocida en cada instante de tiempo. En este punto se podría obviar el conjunto
motor y torno y estudiar únicamente el sistema avión velero.
Se desarrollan a continuación las ecuaciones del problema teniendo en cuenta dichas
consideraciones.
cosdx
w Vdt
(5.63)
sindh
Vdt
(5.64)
0 cos( ) sinT D mg (5.65)
cos sin( )d
mV L mg Tdt
(5.66)
1
sin( ) sind
V wdt R
(5.67)
1 STOP: Bloque de Simulink que para una simulación ante una determinada condición en su señal de entrada.

Modelado del Sistema
54
54
cos cos( )dR
w Vdt
(5.68)
21
2LL V SC (5.69)
21
2DD V SC (5.70)
0
2( )D L D LC C C kC (5.71)
Ahora, se tiene un sistema de 9 ecuaciones y 9 variables dependientes desconocidas, por lo que el
problema está cerrado y puede calcularse su solución en un rango de tiempo.
Si se desarrolla la ecuación (5.65) usando las expresiones (5.70) y (5.71) se llega a una expresión
para el coeficiente de sustentación que se toma como ley de pilotaje que hace que la velocidad se
mantenga constante.
0
0 0
0
2
2 2
2 2
2
2
2
1
2
1 10 cos( ) sin cos( ) ( ) sin
2 2
1 2( ) cos( ) sin cos( ) sin
2
2cos( ) sin
L
L
D D
D
L
D
L
DT V SC mg T V S C kC mg
V S C kC T mg C kC T mgV S
CC T mg
k V S k
(5.72)
En el análisis del problema a velocidad constante se debe tener en cuenta que se pueden exceder en
algún momento los valores límites de algunas variables.
Una de ellas es el coeficiente de sustentación, calculado justo arriba. Toda aeronave tiene un
coeficiente de sustentación máximo al que puede volar, definido por la velocidad de entrada en
pérdida. Por tanto, en el problema con velocidad constante, se deberá controlar esta variable y tararla
al valor máximo en caso de que superara dicho valor. De esta forma, saldrán resultados coherentes.
Además, el factor de carga es otro parámetro que habrá con controlar ya que no puede exceder al
recomendado por el fabricante. Se verá que al limitar el coeficiente de sustentación indirectamente se
limita dicho factor.
5.10 Implementación en Matlab/Simulink sistema V constante
De igual forma al modelo completo, se ha desarrollado en Simulink los bloques necesarios para
implementar las ecuaciones citadas. El modelo tiene el siguiente aspecto:

55
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 5—25 Modelo Simulink V y T Constantes
El modelo es bastante más simple que el desarrollado para el sistema completo. El único bloque que
comparte con el anterior citado, es el bloque del modelo del velero, en cuyo interior, se encuentra los
diagramas de flujo y variables, donde lo único que cambian son las ecuaciones implementadas en la
función de Matlab y que se representan en el ANEXO E.
Además, como se ha dicho en el apartado anterior, se implementa un comprobador del coeficiente de
sustentación en cada momento para que no supere el límite permitido. Ya que la velocidad y la
tensión, son valores de entrada, no se pone esta vez, la comprobación de estos parámetros con
respecto a sus valores límite.
Por último, las entradas del modelo, como no podría ser de otra forma, serían el valor de la tensión y
la velocidad.
El bloque entrada tensión trata de una señal que va de cero a uno y un factor de multiplicación, que
será el valor de la tensión en casi todo el lanzamiento. La señal normalizada sirve para hacer que el
valor de la tensión deseada en el modelo se alcance de forma suave y no se imponga desde el
principio, evitando valores de salida alejados de la realidad en el arranque de la simulación.

Modelado del Sistema
56
56

57
6 ANÁLISIS DE LEYES BÁSICAS Y ESTUDIO DE
PERFORMANCES
espués de tener el sistema de estudio definido matemáticamente, así como el modelo
Simulink, se procede a analizar el sistema para obtener la evolución de las variables
consideradas.
El resultado del análisis dependerá de las leyes de control introducidas. A continuación se analizan
varias posibilidades usando los modelos creados en el capítulo anterior.
6.1 Resultados del sistema completo - Ley de control piloto y torno
Este análisis corresponde a la situación más real del problema. Para definir las leyes de control se
recurre a la naturaleza del sistema y experiencia previa que se tiene del funcionamiento del mismo.
Ley de control tornero
Se implementa aquí la interacción que tendría el tornero con el sistema a través del acelerador del
motor, que se traduce a una modificación de la carga motor y directamente, en variación del par
motor suministrado. La ley propuesta es la siguiente:
Figura 6—1 Ley de Control Tornero
Cuando un lanzamiento comienza, el tornero acelera bruscamente el motor del torno para
implementarle al velero la aceleración necesaria y despegar en los menos metros de pista posibles.
Cuanto antes despegue, mayor cable se tendrá para ganar altura. Una vez que se produce la rotación,
se debe relajar la solicitación del torno, con el objetivo de no aumentar demasiado la tensión del
cable. En la subida, se mantiene una aceleración aproximadamente constante.
Esto que ocurre en la realidad, es lo que se ha intentado implementar para el modelo. La figura
anterior muestra cualitativamente la evolución descrita.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 5 10 15 20 25 30 35 40
λ
Tiempo (s)
Ley Control Tornero
D

Análisis de Leyes Básicas Y Estudio de Performances
58
58
Ley de control piloto
Se implementa aquí la interacción que tendría el piloto con el sistema a través de la palanca, que
como se ha repetido varias veces, se traduce a una modificación del coeficiente de sustentación que
posee el velero en cada instante. La ley propuesta es la siguiente:
Figura 6—2 Ley de Control Piloto
Para comenzar, se tiene coeficiente de sustentación bajo para no dificultar la fase de aceleración
innecesariamente. Se aproxima el tiempo que tardaría el velero en llegar a la velocidad de despegue y
se asegura que para ese instante, se tenga un coeficiente de sustentación suficiente como para
ascender. A continuación, una vez el velero ha despegado, se baja el coeficiente hasta mantenerlo
constante para no hacer crecer mucho la tensión del cable. A lo largo del ascenso, el coeficiente de
sustentación se decide subir poco a poco para ir frenando al velero y no exceda de la velocidad límite
marcada por el fabricante para el remolque.
Esta ley se ha definido en base a la experiencia previamente adquirida de la propia naturaleza del
problema.
Datos adicionales del lanzamiento
Velero elegido: ASK21, fabricante Alexander Schleider Gmbh & Co. Velero biplaza de fabricación
en material compuesto [5].
Tabla 6-1 Parámetros velero ASK21
Parámetro del velero Descripción Valor
0W Peso en vacío 360 kg
MAXW Peso máximo en despegue 600 kg
S Superficie alar 17,95 m2
Alargamiento 16,1
NEV (en vuelo)1 Velocidad máxima 280 Km/h
NEV (remolque por torno) Velocidad máxima 150 Km/h
WV Velocidad remolque recomendada2 110-120 Km/h
1 VNE: Velocidad “Never Exceed”. Velocidad que el fabricante recomienda no rebasar. Existen varias, según la parte del vuelo. 2 Velocidad aerodinámica a la que el fabricante recomienda volar durante el lanzamiento por torno.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 5 10 15 20 25 30 35
CL
Tiempo (s)
Ley de Control Piloto

59
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
STALLV Velocidad de entrada en pérdida 69 Km/h
MAXE Eficiencia aerodinámica máxima (L/D)1 31
MAXE
W
S
Carga alar para eficiencia máxima 31 kg/m2
MAXEV Velocidad para eficiencia máxima 90 Km/h
Fusible Fusible límite tensión cable Negro (Rotura: 1000 kg)
Factor de carga Fuerzas G verticales 5,3/-2,65
Los valores necesarios para el cálculo del sistema, serán la superficie alar, peso total y coeficientes
constantes de la polar parabólica.
Se hará la suposición de que el peso del velero más el peso de los pilotos sumará un total de 500 kg.
Para el cálculo de los coeficientes constantes 0DC y k se recurre a los apuntes de Mecánica del
Vuelo I, donde se tiene lo siguiente:
0
2
L
L
L
D D
CCLE
D C C k C
(6.1)
Como el dato que se tiene del fabricante es la eficiencia máxima, se calcula la expresión en función
del coeficiente de sustentación, el cual, será el coeficiente de sustentación óptimo:
0
2 20 2 0L Lopt opt
MAX D
L
dEE C k C k C
dC (6.2)
Quedando,
0
opt
D
L
CC
k (6.3)
Además, este valor se puede calcular con la siguiente expresión:
2
2
1 2
2 MAX opt opt
MAX
E L L
E
WW L SV C C
SV
(6.4)
Por otro lado, retomando la ecuación (6.1) y calculando la eficiencia máxima se tiene:
0
00 0
0
2
1
2
Lopt
opt
D
MAXDD L D
D
CC k
ECC k C C k
C kk
(6.5)
Se tiene pues, con las ecuaciones (6.3) y (6.5) un sistema de ecuaciones para los dos coeficientes de
la polar parabólica.
Resolviendo el sistema de ecuaciones con los valores aportados por el fabricante, se tiene como
resultado:
1 Eficiencia aerodinámica: Parámetro que define la capacidad de una aeronave para tener mayor o menor ángulo mínimo de planeo. En veleros se caracteriza por ser mayor al resto de aeronaves, ya que están diseñados para ello.

Análisis de Leyes Básicas Y Estudio de Performances
60
60
0,0214k (6.6)
Además de:
0
0,0122DC (6.7)
Definidos estos parámetros aerodinámicos, se toman el resto de datos del problema como aparece en
la tabla:
Tabla 6-2 Otros parámetros de entrada
Parámetro del problema Descripción Valor
inicialR Longitud inicial cable 1000 m
10hw Viento a 10 m de altura 18 Km/h
MAXQ Par máximo del motor 400 Nm
Factor multiplicación reductora 10
c Diámetro cable acero 4,5 mm
c Densidad lineal del cable de acero 0,077 kg/m
r Radio bobina torno 0,6 m
m Masa bobina torno 50 kg
Hay que tener en cuenta que el par máximo del motor, como se vio en el apartado correspondiente,
depende del régimen de trabajo del motor según el mapa motor del fabricante. El motor elegido es un
motor diésel V-8 de 4,8 litros, el cual, tiene una potencia máxima de 285 CV a 5.400 RPM y ofrece
un par motor máximo de 400 Nm a 4.600 RPM.
El mapa motor del motor, aportado por el fabricante, es el siguiente:
Figura 6—3 Mapa Motor Vortec 2016 V-8
Para poder hacer uso del mapa motor en el modelo, se decide crear una curva que se asemeje lo
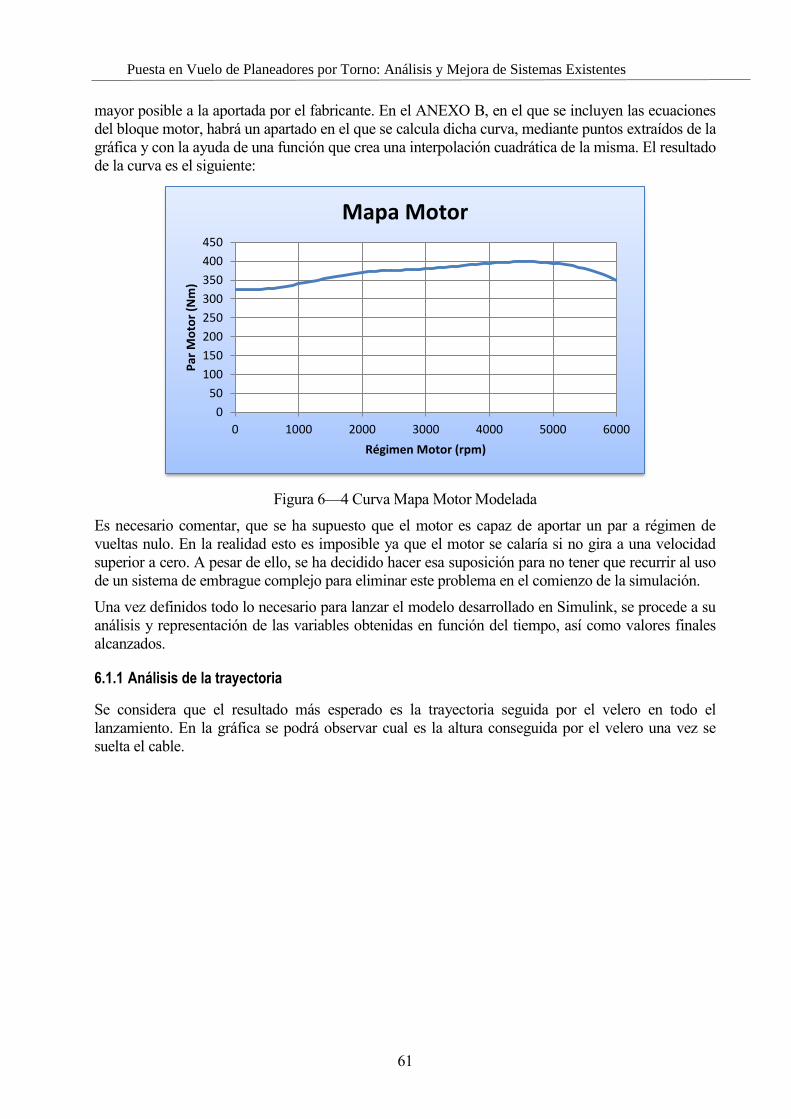
61
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
mayor posible a la aportada por el fabricante. En el ANEXO B, en el que se incluyen las ecuaciones
del bloque motor, habrá un apartado en el que se calcula dicha curva, mediante puntos extraídos de la
gráfica y con la ayuda de una función que crea una interpolación cuadrática de la misma. El resultado
de la curva es el siguiente:
Figura 6—4 Curva Mapa Motor Modelada
Es necesario comentar, que se ha supuesto que el motor es capaz de aportar un par a régimen de
vueltas nulo. En la realidad esto es imposible ya que el motor se calaría si no gira a una velocidad
superior a cero. A pesar de ello, se ha decidido hacer esa suposición para no tener que recurrir al uso
de un sistema de embrague complejo para eliminar este problema en el comienzo de la simulación.
Una vez definidos todo lo necesario para lanzar el modelo desarrollado en Simulink, se procede a su
análisis y representación de las variables obtenidas en función del tiempo, así como valores finales
alcanzados.
6.1.1 Análisis de la trayectoria
Se considera que el resultado más esperado es la trayectoria seguida por el velero en todo el
lanzamiento. En la gráfica se podrá observar cual es la altura conseguida por el velero una vez se
suelta el cable.
0
50
100
150
200
250
300
350
400
450
0 1000 2000 3000 4000 5000 6000
Par
Mo
tor
(Nm
)
Régimen Motor (rpm)
Mapa Motor

Análisis de Leyes Básicas Y Estudio de Performances
62
62
Figura 6—5 Trayectoria del Lanzamiento
En la figura se muestra la trayectoria seguida por el velero en el proceso de lanzamiento. Cabe
indicar que el punto (0,0) se corresponde con la posición del torno. La altura máxima conseguida está
en torno a los 450 metros, cerca de la mitad de la longitud del cable usado. Este resultado se asemeja
bastante a la realidad.
Se aprovecha este apartado para analizar la influencia del viento en el lanzamiento.
Figura 6—6 Influencia del Viento en la Trayectoria
Se observa como a medida que baja el viento de cara o incluso se tiene viento de cola, se empeoran
los resultados. Esto coincide exactamente con la realidad ya que siempre es preferible hacer un
lanzamiento de cara al viento. El motivo es sencillo, al haber viento en contra, para el sistema velero
es una componente de velocidad aerodinámica positiva y gratuita que le sirve para volar.
0
100
200
300
400
500
0 200 400 600 800 1000
Alt
ura
(m
)
Alcance (m)
Trayectoria del Lanzamiento
0
50
100
150
200
250
300
350
400
450
500
0 200 400 600 800 1000
Alt
ura
(m
)
Alcance (m)
Influencia del Viento
Viento de cara
Sin Viento
Viento de cola

63
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
6.1.2 Análisis de la tensión del cable
En la siguiente figura se muestra la evolución de la tensión del cable.
Figura 6—7 Tensión del Cable
Se observa como en el comienzo del lanzamiento tiene una subida considerable debido a la fuerte
aceleración que solicita el operador de torno, según la ley impuesta. El pico que existe en la zona
entre 4 y 6 segundos se debe a la rotación provocada en el despegue, momento en el que la tensión se
hace máxima, tal y como se comentó en el apartado de operaciones. Se observa como antes del
despegue, ocurre una caída de tensión. Esto se debe a la propia ley definida de operación de torno, la
cual, contemplaba una bajada del par suministrado y así se ve reflejado en la tensión. La única
diferencia, como ya se ha dicho antes, es que a partir del segundo 4 aproximadamente, el velero
despegue y rota, aumentando mucho la tensión del cable, independientemente de que el torno haya
reducido su velocidad de recogida.
Este hecho, hace pensar que es muy crítica la relación entre las variables y la evolución en el tiempo
de las variables de estado, no solo dependerán de una variable de entrada, si no de todas las variables
del problema así como de la zona en la que se encuentre del lanzamiento.
Por otro lado, la tensión no supera los 5000 Newtons, estando muy por debajo del límite del fusible
(10.000 N). Esto hace pensar que quizás, se pueda hacer un lanzamiento con leyes más agresivas en
cuanto a par suministrado o motor elegido y así conseguir una altura superior.
El hecho de que la evolución de las variables sea con oscilación e irregularidades se debe a la propia
naturaleza del sistema, que como se podría decir, “todo depende de todo”. Además, hay que tener en
cuenta, que se usa un modelo de motor de respuesta instantánea sin ningún tipo de amortiguamiento.
Esto último, se aleja de la realidad, ya que todo sistema mecánico posee una amortiguación natural
que hace que la evolución de las variables de salida sea más suave.
Esa respuesta tan rápida del propio motor, puede dar lugar a inestabilidades en el sistema.
0
1000
2000
3000
4000
5000
6000
0 5 10 15 20 25 30 35
Ten
sió
n (
N)
Tiempo (s)
Tensión del Cable

Análisis de Leyes Básicas Y Estudio de Performances
64
64
6.1.3 Análisis de la velocidad aerodinámica
A continuación, se muestra la evolución de la velocidad aerodinámica del velero.
Figura 6—8 Velocidad Aerodinámica
En cuanto a la velocidad, se puede decir que sube hasta el momento del despegue y luego oscila en
torno a un margen aproximadamente constante. Se vuelve a observar como por el momento, todas
las variables mostradas, sufren una pequeña oscilación. Esto se debe a la propia dinámica del sistema
como se ha dicho. Además, al ser un modelo en bucle abierto, donde el sistema ni las leyes de
control conocen las variables de salida (no hay realimentación), se producen estas oscilaciones. Estas
oscilaciones no pueden ser corregidas por las entradas, al estar ya previamente definidas.
A pesar de ello, los resultados obtenidos están cerca de los recomendados por el fabricante en el caso
de la velocidad (120-140 km/h) y no superior a 150 km/h.
De todos modos, si se superaran los límites permitidos por el fabricante sería normal, ya que las leyes
de control impuestas han sido aproximadas y no se conocen a priori los resultados.
6.1.4 Análisis del resto de variables
Una vez vista las variables más importantes del problema, se aprovechan los resultados para observar
otras variables, como el factor de carga, régimen del motor o potencia desarrollada en cada instante
de tiempo.
Factor de carga
El factor de carga debe ser un parámetro controlado en todo momento, ya que es crítico tanto para la
resistencia estructural de la aeronave, así como la propia fortaleza física del piloto del velero. Según
fabricante el valor máximo permitido era 5,3 veces la gravedad.
0
20
40
60
80
100
120
140
160
0 5 10 15 20 25 30 35 40
Ve
loci
dad
(km
/h)
Tiempo (s)
Velocidad Aerodinámica

65
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 6—9 Factor de Carga
En la figura se ve que el máximo alcanzado está entorno al segundo 5, aunque muy por debajo del
límite. Este instante tiempo coincide con el de tensión máxima y como se verá justo ahora, coincide
con el momento de la rotación.
Al igual que ocurría con la tensión, el factor de carga tiene margen para aumentar, por lo que de igual
forma, el resultado hace ver, que se podría hacer un lanzamiento más agresivo.
Régimen de trabajo del motor
A continuación se muestra las vueltas a la que se ve sometido el eje de motor. Esto servirá para ver si
se ha dimensionado bien dicho motor. Como se vio anteriormente, se estableció un factor de
multiplicación, que transforma las vueltas de motor en las vueltas del eje de trasmisión, a modo de
caja reductora.
Figura 6—10 Régimen de Vueltas del Motor
El valor obtenido se encuentra en el margen 4.500-1.500 r.p.m, valor típico de un motor tipo diésel,
por lo que se puede decir que el motor está bien dimensionado. Cabe destacar, que un motor real,
tiene varios factores de multiplicación, según la marcha engranada. Debido a que se hizo la
0,0
0,5
1,0
1,5
2,0
2,5
0 5 10 15 20 25 30 35 40
Fact
or
de
Car
ga
Tiempo (s)
Factor de Carga
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0 5 10 15 20 25 30 35 40
Ré
gim
en
Vu
elt
as (
r.p
.m.)
Tiempo (s)
Régimen de Motor
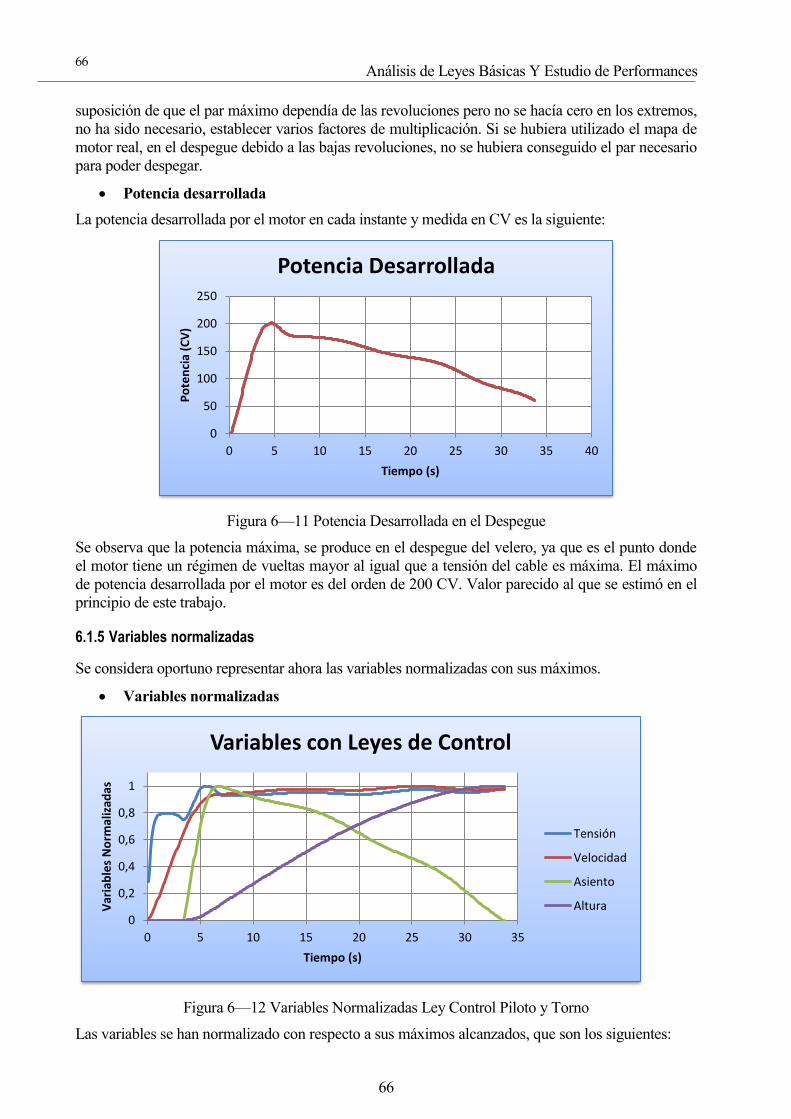
Análisis de Leyes Básicas Y Estudio de Performances
66
66
suposición de que el par máximo dependía de las revoluciones pero no se hacía cero en los extremos,
no ha sido necesario, establecer varios factores de multiplicación. Si se hubiera utilizado el mapa de
motor real, en el despegue debido a las bajas revoluciones, no se hubiera conseguido el par necesario
para poder despegar.
Potencia desarrollada
La potencia desarrollada por el motor en cada instante y medida en CV es la siguiente:
Figura 6—11 Potencia Desarrollada en el Despegue
Se observa que la potencia máxima, se produce en el despegue del velero, ya que es el punto donde
el motor tiene un régimen de vueltas mayor al igual que a tensión del cable es máxima. El máximo
de potencia desarrollada por el motor es del orden de 200 CV. Valor parecido al que se estimó en el
principio de este trabajo.
6.1.5 Variables normalizadas
Se considera oportuno representar ahora las variables normalizadas con sus máximos.
Variables normalizadas
Figura 6—12 Variables Normalizadas Ley Control Piloto y Torno
Las variables se han normalizado con respecto a sus máximos alcanzados, que son los siguientes:
0
50
100
150
200
250
0 5 10 15 20 25 30 35 40
Po
ten
cia
(CV
)
Tiempo (s)
Potencia Desarrollada
0
0,2
0,4
0,6
0,8
1
0 5 10 15 20 25 30 35
Var
iab
les
No
rmal
izad
as
Tiempo (s)
Variables con Leyes de Control
Tensión
Velocidad
Asiento
Altura

67
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Tabla 6-3 Valores máximos alcanzados para normalizar
Variable Tensión (N) Velocidad (Km/h) Asiento (º) Factor Carga Altura (m)
Valor
Máximo 5166 N 138 Km/h 40,4 2,35 452
En la figura mostrada, se ve a simple vista cómo han evolucionado conjuntamente y para cada
instante de tiempo las variables más importantes del problema.
Lo más importante que se ve en la figura es la evidencia de que los máximos de las variables,
tensión, velocidad y asiento ocurren en el mismo instante, en la rotación, ya que se ve como la altura
empieza a hacerse positiva.
Después de este momento, las variables de tensión y velocidad se mantienen aproximadamente
constantes y el ángulo de asiento empieza a decaer hasta el momento que se hace nulo, por lo que se
deja de ascender y termina el lanzamiento.
Debido al interés en la zona de la rotación, se decide hacer un zoom en la zona.
Variables normalizadas en el momento de la rotación
Figura 6—13 Variables Normalizadas Momento de la Rotación
Se representa aquí además el factor de carga y se observa claramente como en el rango de tiempo 4-6
se produce el ascenso del velero y la consiguiente rotación inicial.
Se ve claramente, como alcanzan sus valores máximos, las variables, tensión, factor de carga, asiento
o velocidad.
Por este motivo, se puede asegurar que el instante más crítico y en el que se tendrá que poner mayor
atención es en la rotación del velero.
Todo esto, cuadra con lo comentado en el apartado de operación de este tipo de sistemas.
0
0,2
0,4
0,6
0,8
1
0 2 4 6 8 10
Var
iab
les
No
rmal
izad
as
Tiempo (s)
Variables en la Rotación
Tensión
Velocidad
Asiento
Factor Carga
Altura
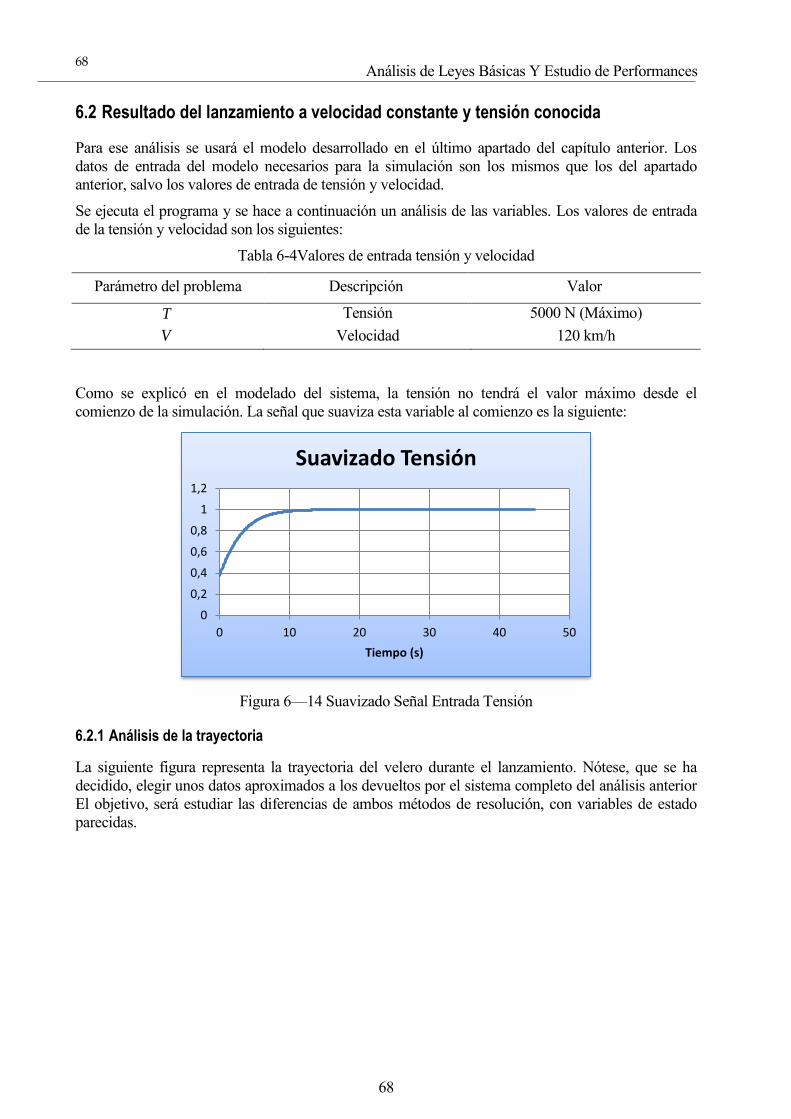
Análisis de Leyes Básicas Y Estudio de Performances
68
68
6.2 Resultado del lanzamiento a velocidad constante y tensión conocida
Para ese análisis se usará el modelo desarrollado en el último apartado del capítulo anterior. Los
datos de entrada del modelo necesarios para la simulación son los mismos que los del apartado
anterior, salvo los valores de entrada de tensión y velocidad.
Se ejecuta el programa y se hace a continuación un análisis de las variables. Los valores de entrada
de la tensión y velocidad son los siguientes:
Tabla 6-4Valores de entrada tensión y velocidad
Parámetro del problema Descripción Valor
T Tensión 5000 N (Máximo)
V Velocidad 120 km/h
Como se explicó en el modelado del sistema, la tensión no tendrá el valor máximo desde el
comienzo de la simulación. La señal que suaviza esta variable al comienzo es la siguiente:
Figura 6—14 Suavizado Señal Entrada Tensión
6.2.1 Análisis de la trayectoria
La siguiente figura representa la trayectoria del velero durante el lanzamiento. Nótese, que se ha
decidido, elegir unos datos aproximados a los devueltos por el sistema completo del análisis anterior
El objetivo, será estudiar las diferencias de ambos métodos de resolución, con variables de estado
parecidas.
0
0,2
0,4
0,6
0,8
1
1,2
0 10 20 30 40 50
Tiempo (s)
Suavizado Tensión

69
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 6—15 Trayectoria del Lanzamiento con V Constante
Se observa en este caso como la trayectoria es bastante suave, ya que se ha eliminado todo el
dinamismo que provoca la inercia de la bobina del torno y el bloque motor. Por otro lado, se observa
que el despegue es inminente. Esto es obvio, ya que el valor de la velocidad de vuelo impuesta y
constante supera a la velocidad de liftoff, por lo que el velero desde el primer instante está volando,
no hay fase de rodaje.
Los datos utilizados en cuanto a características de velero y condiciones atmosféricas han sido los
mismos con respecto al modelo completo de entrada acelerador y coeficiente de sustentación, por lo
que se pueden comparar cuantitativamente los resultados tal y como se comentó anteriormente.
Se puede entonces decir, que la altura final conseguida es significantemente mayor, se ha superado la
barrera de los 500 metros.
Se puede entonces prever, que el sistema dará mejores resultados si se mantienen los valores de
velocidad y tensión constantes en todo el lanzamiento. Aunque esto es solo una previsión.
Es interesante ver como varían los resultados en función de los parámetros de entrada de tensión y
velocidad.
Variación de la trayectoria con respecto a la tensión
La figura siguiente muestra la variación de la trayectoria y altura conseguida para tres valores
distintos de tensión aplicada.
0
100
200
300
400
500
600
0 200 400 600 800 1000
Alt
ura
(m
)
Alcance (m)
Trayectoria del Lanzamiento

Análisis de Leyes Básicas Y Estudio de Performances
70
70
Figura 6—16 Variación de la Trayectoria con la Tensión
Como era de esperar, se observa como a medida que se aumenta la tensión aplicada en el cable, el
velero gana más altura.
Por ello se puede afirmar que el lanzamiento óptimo en cuanto a tensión del cable, será lanzar con la
máxima tensión posible, recomendada por el fabricante y que no exceda a la tensión a la que está
tarado el fusible usado.
Variación de la trayectoria con respecto a la velocidad
De igual forma que con la tensión, se aporta la siguiente figura, que muestra como varía la
trayectoria en función de la velocidad aerodinámica de vuelo.
Figura 6—17 Variación de la Trayectoria con la Velocidad
El análisis de la variación con la velocidad, no es tan obvio como el de la tensión. En la figura, se
observa como en la primera etapa del lanzamiento, a mayor velocidad de vuelo, mayor tasa de
ascenso del velero. Sin embargo, a medida que se llega al final del velero, las tendencias cambian y
es la curva asociada a la velocidad de vuelo más baja la que consigue una altura final mayor.
0,0
100,0
200,0
300,0
400,0
500,0
600,0
700,0
0,0 200,0 400,0 600,0 800,0 1000,0
Alt
ura
(m
)
Alcance (m)
Trayectoria del Lanzamiento
T=5000 N
T=6500 N
T=8000 N
0,0
100,0
200,0
300,0
400,0
500,0
600,0
0,0 200,0 400,0 600,0 800,0 1000,0
Alt
ura
(m
)
Alcance (m)
Trayectoria del Lanzamiento
V=120 Km/h
V=130 Km/h
V=140 Km/h
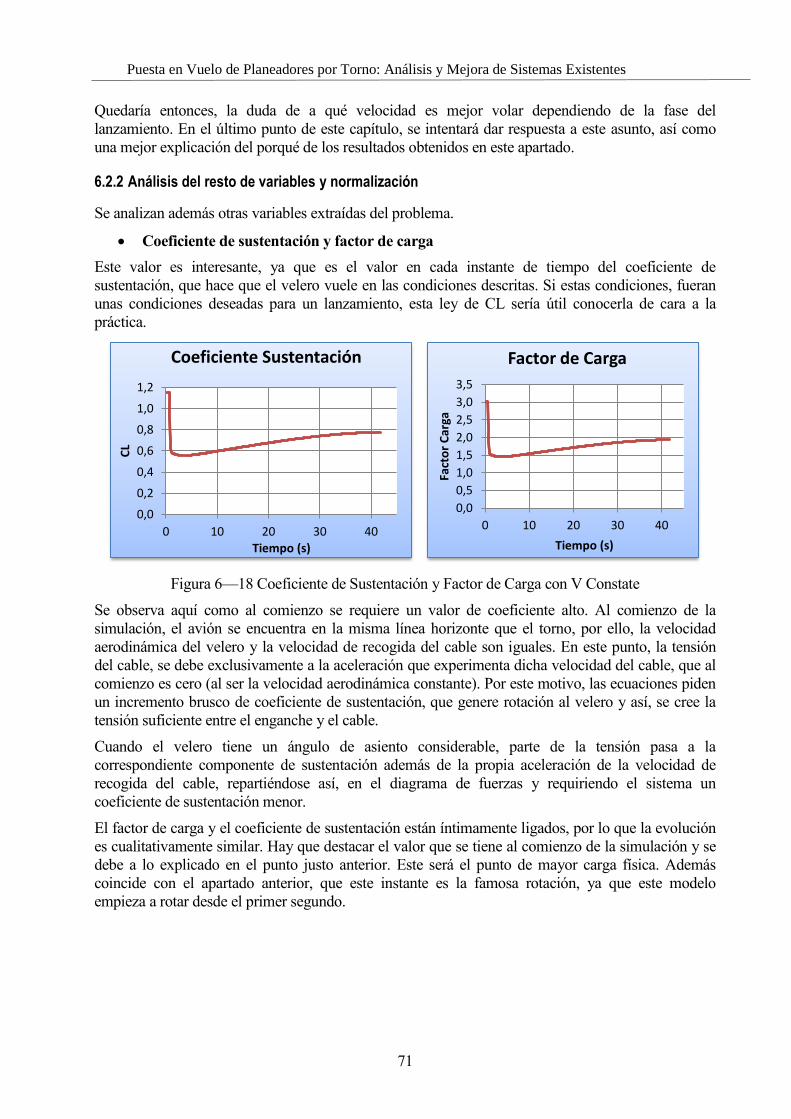
71
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Quedaría entonces, la duda de a qué velocidad es mejor volar dependiendo de la fase del
lanzamiento. En el último punto de este capítulo, se intentará dar respuesta a este asunto, así como
una mejor explicación del porqué de los resultados obtenidos en este apartado.
6.2.2 Análisis del resto de variables y normalización
Se analizan además otras variables extraídas del problema.
Coeficiente de sustentación y factor de carga
Este valor es interesante, ya que es el valor en cada instante de tiempo del coeficiente de
sustentación, que hace que el velero vuele en las condiciones descritas. Si estas condiciones, fueran
unas condiciones deseadas para un lanzamiento, esta ley de CL sería útil conocerla de cara a la
práctica.
Figura 6—18 Coeficiente de Sustentación y Factor de Carga con V Constate
Se observa aquí como al comienzo se requiere un valor de coeficiente alto. Al comienzo de la
simulación, el avión se encuentra en la misma línea horizonte que el torno, por ello, la velocidad
aerodinámica del velero y la velocidad de recogida del cable son iguales. En este punto, la tensión
del cable, se debe exclusivamente a la aceleración que experimenta dicha velocidad del cable, que al
comienzo es cero (al ser la velocidad aerodinámica constante). Por este motivo, las ecuaciones piden
un incremento brusco de coeficiente de sustentación, que genere rotación al velero y así, se cree la
tensión suficiente entre el enganche y el cable.
Cuando el velero tiene un ángulo de asiento considerable, parte de la tensión pasa a la
correspondiente componente de sustentación además de la propia aceleración de la velocidad de
recogida del cable, repartiéndose así, en el diagrama de fuerzas y requiriendo el sistema un
coeficiente de sustentación menor.
El factor de carga y el coeficiente de sustentación están íntimamente ligados, por lo que la evolución
es cualitativamente similar. Hay que destacar el valor que se tiene al comienzo de la simulación y se
debe a lo explicado en el punto justo anterior. Este será el punto de mayor carga física. Además
coincide con el apartado anterior, que este instante es la famosa rotación, ya que este modelo
empieza a rotar desde el primer segundo.
0,0
0,2
0,4
0,6
0,8
1,0
1,2
0 10 20 30 40
CL
Tiempo (s)
Coeficiente Sustentación
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
0 10 20 30 40
Fact
or
Car
ga
Tiempo (s)
Factor de Carga

Análisis de Leyes Básicas Y Estudio de Performances
72
72
Variables normalizadas
A continuación se representan las variables normalizadas, que al igual que en el apartado anterior, se
considera de interés su análisis.
Figura 6—19 Variables Normalizadas para V Constante
Los valores se han normalizado con respecto a sus máximos, representados en la tabla siguiente:
Tabla 6-5 Valores máximos alcanzados para normalizar
Variable Tensión (N) Velocidad (Km/h) CL Asiento (º) Factor Carga Altura (m)
Valor
Máximo 5000 N 120 Km/h 1,21 37,5 3,02 529
La evolución de las variables es cualitativamente similar, teniéndose al comienzo valores altos,
debido de nuevo a la rotación del velero.
Como primera conclusión al análisis, se demuestra que existe un instante crítico del lanzamiento y es
la rotación. Ya se comentó en el apartado de operación del sistema, que es este, el momento más
exigente de la puesta en vuelo, debido a que las variables alcanzan sus máximos y aumenta por ello
el riesgo a sobrepasarlas.
0,0
0,2
0,4
0,6
0,8
1,0
1,2
0,0 5,0 10,0 15,0 20,0 25,0 30,0 35,0 40,0
Var
iab
les
No
rmal
izad
as
Tiempo (s)
Variables con V Constante
Tensión
Velocidad
CL
Asiento
Factor Carga
Altura

73
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
6.3 Estudio de Performances
Recordando los objetivos del trabajo, se planteó hacer un estudio de las performances del velero para
poder intuir en qué medida se puede variar los parámetros del problema y conseguir leyes de vuelo
que hagan la altura máxima, en definitiva, definir leyes de lanzamiento óptimas si es que las hubiera.
De la misma forma se intentará justificar los resultados obtenidos en los apartados anteriores.
Para este apartado a modo de simplificación del estudio se estudiará el modelo en un punto en
concreto del lanzamiento, definido por un valor del ángulo de elevación del cable. Por otro lado, se
hace la hipótesis de que en ese instante de tiempo el problema es cuasi-estacionario. La anterior
condición queda definida por las siguientes expresiones:
0 (6.8)
0V (6.9)
Además se estudiará únicamente el modelo Velero, eliminando así la influencia del torno, motor o
cable. Por último, también será un parámetro conocido el valor de la tensión en el cable para el punto
elegido.
Con todo ello, las ecuaciones del vuelo para el velero en estas condiciones quedan:
0 cos( ) sinT D mg (6.10)
0 cos sin( )L mg T (6.11)
Con estas dos ecuaciones y definidos las variables de tensión y ángulo del cable, quedarían 3 únicas
variables libres, la velocidad, ángulo de asiento y coeficiente de sustentación.
A continuación se coge la ecuación (6.11) y se despeja de ella el coeficiente de sustentación,
quedando:
2
2
10 cos sin( )
2
2sin( ) cos
L
L
SV C mg T
C T mgSV
(6.12)
Se sustituye ahora el coeficiente de sustentación en la ecuación (6.10).
0
0
2 2
2
2
2
10 cos( ) sin
2
1 20 cos( ) sin( ) cos sin
2
D L
D
T SV C k C mg
T SV C k T mg mgSV
(6.13)
La ecuación final (6.13) representa la relación que existe entre la velocidad aerodinámica de vuelo y
el ángulo de asiento del velero, ligado este último, a la ganancia de altura. Se puede entonces,
representar curvas relacionando estas dos variables con dicha ecuación para varios valores de la
tensión del cable aplicada, así como, del ángulo de elevación del cable.
Dicha ecuación se implementa mediante una función en Matlab representada en el ANEXO F. La
función, se decide resolver por método de iteración. Se creará un vector de datos asociados a las
velocidades de vuelo y para cada uno de los valores se resolverá la ecuación y se obtendrá el valor
del asiento que hace que se cumpla dicha ecuación.
Además del estudio de la velocidad con respecto al ángulo de asiento, también se hará con respecto a

Análisis de Leyes Básicas Y Estudio de Performances
74
74
la velocidad de subida (ROC1). Esta variable se representa como ZV o directamente como ROC. Se
calcula de la siguiente forma:
sinzV ROC V (6.14)
A continuación se representan las curvas obtenidas, usando como ejemplo el velero ASK21.
ROC para posición de cable dada
Figura 6—20 Rate Of Climb en función de Tensión y Velocidad
Para esta variable, se observa que a medida que la velocidad de vuelo sube, también lo hace la
misma, por lo que, para una posición de cable dada y para un valor de tensión, interesa volar a
velocidad aerodinámica máxima para conseguir el mayor ratio de ascenso. Se supone que se llegará a
la altura deseada más rápido, cuando mayor sea este ratio en cada instante del lanzamiento.
Además como era de esperar, a medida que la tensión sube, siempre subirá esta variable, ya que se
tendrá más empuje para el ascenso.
En este y en el resto de los casos, la velocidad máxima en el tramo de remolque por torno está
limitada por el fabricante, por lo que, aunque se quisiera volar por encima de ella, no se podría.
1 ROC: Rate of Climb o ratio de ascenso del velero. Es la velocidad vertical de la aeronave.

75
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Gamma para posición de cable dada
Figura 6—21 Ángulo de Asiento en función de Tensión y Velocidad
Se representa ahora la variable del asiento, que recordando su naturaleza, era el ángulo que formaba
el vector velocidad aerodinámica, con la horizontal. En definitiva, esta variable aporta el ángulo con
el que el velero está subiendo. Se supone, que se conseguirá mayor altura, cuanto mayor sea este
ángulo en cada uno de los instantes del lanzamiento.
Analizando la gráfica, se observa de nuevo, que a mayor tensión en el cable mayor ángulo de
ascenso, llegando incluso a valores próximos a los 45 grados con la tensión cercana a la tensión de
fusible recomendada por cliente (máxima a la que se puede remolcar). Queda claro, por tanto, que
para volar al mayor ángulo de ascenso posible, interesará una tensión grande.
Lo interesante de esta gráfica a es el hecho de que, una vez fijada la tensión, existe una velocidad
aerodinámica que maximiza el ángulo de subida. Es decir, para volar a mayor ángulo de ascenso no
interesa la mayor velocidad aerodinámica posible, sino que hay otros valores de la velocidad,
menores a la máxima, que hacen que el lanzamiento tenga mejores resultados.
Esto explica el resultado obtenido en el estudio de trayectorias en función de la velocidad, donde no
se tenía una interpretación clara de los resultados y no era obvia la relación existente entre la
velocidad de vuelo durante el lanzamiento y la altura final conseguida.
Otro aspecto importante que se extrae de la gráfica es que el máximo del ángulo de ascenso ocurre a
una velocidad de vuelo mayor, a medida que sube la tensión. Es decir, si se tiene una tensión
aplicada en el cable mayor, el valor de la velocidad que hace máximo el ángulo de subida será
mayor. Esto tiene sentido físico y es que si tenemos más empuje, se puede permitir el velero volar a
una velocidad mayor sin penalizar la ganancia de altura.

Análisis de Leyes Básicas Y Estudio de Performances
76
76
Recordando que en el ascenso o descenso de un velero se produce un intercambio de energía entre la
cinética y la potencial, si se quiere tener mayor cinética, se perjudicará la altura y viceversa. Sin
embargo, al haber una fuente externa de energía, se puede permitir aumentar la cinética sin
perjudicar la potencial o viceversa. En este caso, la fuente de energía es la tensión del cable.
ROC para tensión dada
Figura 6—22 Rate Of Climb en función de Tensión y Elevación
En esta representación gráfica se estudia ahora, la evolución del ratio de ascenso en función una vez
más de velocidad y para varios valores de la posición del cable o elevación, la cual, representa la fase
en la que el velero se sitúa en el lanzamiento. Quizás este estudio sea más interesante de cara a ver
cómo evolucionan las variables a lo largo de un lanzamiento con tensión constante.
A diferencia de la evolución con la tensión, a medida que el ángulo del cable se hace mayor, la
capacidad que tiene el velero de ascender se va reduciendo, llegando a cero para ángulos del cable
cercanos a la suelta del mismo, como era de esperar. Esto se debe a que el ángulo del cable con
respecto a la horizontal es el ángulo con el que se aplica la tensión al velero, a mayor elevación, la
tensión se aplicará de manera más vertical, aportando al velero menos empuje en el sentido del
avance.
Se llega a un momento en el que el cable está tan perpendicular al velero, que la tensión no tiene
apenas componente en el sentido del avance, actuando como si de un gran peso se tratara y obliga al
velero a descender, por lo que se considera finalizada la fase del ascenso.
Al margen de eso, se ve de nuevo, que independientemente del valor de la posición del cable, es
decir, de la fase del lanzamiento, siempre se cumple que a mayor velocidad de vuelo, mayor ratio de
ascenso. Para elevaciones altas, existe un valor que maximiza el ROC, pero siempre por encima de la
velocidad máxima permitida.

77
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Gamma para tensión dada
Figura 6—23 Ángulo de Asiento en función de Tensión y Elevación
Se representa ahora la evolución del ángulo de ascenso en función de la velocidad a la que esté
volando el velero y para las distintas fases del lanzamiento.
Al igual que ocurre con el ROC, a mayor elevación, el ángulo con el que se puede ascender es
menor, debido al mismo efecto de la reducción de la efectividad de la tensión aplicada al velero.
Como conclusión a esto, se puede afirmar, que el intervalo en el lanzamiento donde se consigue
mayor altura es en la primera mitad del mismo.
Para una fase del lanzamiento dada se vuelve a observar la existencia de una velocidad dentro del
rango de velocidad permitidas de vuelo, que hace que el asiendo sea el mayor posible. Además, es
curioso observar que a mayor elevación del cable, la velocidad que hace que el asiento sea mayor se
va desplazando hacia la derecha, es decir, va aumentando.
Es adecuado comentar, que aunque exista un valor de la velocidad que hace que el ángulo del
ascenso sea máximo, se observa que las curvas son muy planas entorno a ese máximo. Es decir,
variar la velocidad no influirá mucho en el ángulo con el que se está subiendo.
El fabricante para el velero considerado, recomendaba volar entorno a los 120 km/h, efectivamente,
valor que está en el entorno de los máximos calculados.

Análisis de Leyes Básicas Y Estudio de Performances
78
78
Ley de ascenso óptimo
Figura 6—24 Ley de Performance Óptima
Se representa en la gráfica anterior todo lo anteriormente calculado en una misma representación. En
ella, se tiene para cada valor de la tensión aplicada al cable, la velocidad de vuelo a la que habría que
volar para cada fase del lanzamiento de tal modo que se consiga volar al mayor ángulo de asiento
posible.
Se observa que para todo el rango de tensiones, el margen de vuelo óptimo va entre los 100 y los 150
km/h.
Como se vio en la figura justo anterior a esta, volar en este rango de velocidades, aunque haya un
óptimo, no supone una gran variación del ángulo de subida.
Teniendo en cuenta además, que en el caso de la variable del ratio de ascenso, siempre interesaba
volar a mayor velocidad posible, uniendo estos dos aspectos, se puede llegar a la conclusión, que lo
óptimo es volar a la mayor velocidad permitida. Con esta consideración, llegaríamos a una altura
aproximadamente a la óptima, pero en un tiempo mucho menor, ya que el ROC sería alto, por lo que
la eficiencia energética del lanzamiento aumenta.
En resumen, si se quiere maximizar la altura conseguida, habrá que implementar la ley de vuelo de
velocidad variable definida en la Figura 6—24. Pero por otro lado, interesará volar a la mayor
velocidad posible, para llegar a la altura final en el menor tiempo posible. Queda a gusto del usuario.

79
7 MODELADO Y ANÁLISIS DE LOS SISTEMAS DE
MEJORA PROPUESTOS
n esta sección se desarrollan las aplicaciones creadas para el aprovechamiento del modelo
creado y conseguir de esa forma el resto de los objetivos marcados para el trabajo.
7.1 Modelado del Simulador
Para sacar jugo al modelo de lanzamiento de veleros creado, se decide implementar al mismo un
Joystick y hacer que las entradas (leyes de control del sistema) sean aportadas por el mismo, actuado
por el usuario.
El modelo usado es el mismo que en los apartados anteriores pero creando un bloque de entradas
asociado a este dispositivo.
Además, el modelo Simulink cuenta con una interfaz visual para ver el velero en todo instante del
lanzamiento así como las variables más representativas.
El modelo Simulink modificado es el siguiente:
Figura 7—1 Modelo Simulink Simulador de Puesta en Vuelo de Veleros
El bloque representado en color amarillo representa el bloque de entrada directa que hace de interfaz
con el usuario. Este recoge los datos de la posición de palanca y acelerador directamente del Joystick
y los convierte en una señal adecuada para su uso en el modelo. El dispositivo usado, es del
fabricante conocido en el mundo de los videojuegos, “Thrustmaster”. A continuación se representa
E

Modelado y Análisis de los Sistemas de Mejora Propuestos
80
80
una imagen del mismo, así como el método de entrada de las variables mencionadas.
Figura 7—2 Actuaciones en Joystick Usado en Simulador
Además, se mantiene el bloque morado de entrada automática de una Ley de Tornero, por si se
quiere usar el Simulador solo para el entrenamiento del piloto, eliminando así, la variable del
acelerador del motor en el Joystick.
El bloque VR Sink, traslada las señales de las variables de estado del velero a un mundo virtual de
Matlab en el que se ve el velero y su movimiento en 3D en todo instante del lanzamiento.
El tiempo de simulación se ha reducido con el objetivo de hacer que la integración por parte de
Simulink se haga más lenta y la velocidad de ejecución del programa sea aproximadamente en
tiempo real, para así dotar de realismo al lanzamiento.
La pantalla que ve el usuario durante la ejecución del Simulador es la siguiente:
Figura 7—3 Pantalla en Tiempo Real del Simulador

81
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Por un lado, se ve el velero en el aire. Además se representa la trayectoria recorrida así como las
variables principales del sistema, velocidad aerodinámica y tensión del cable en cada instante.
Además, para estas dos últimas variables, se pueden representar como referencia, valores como la
velocidad de entrada en pérdida (valor que no se debe volar por debajo de él), o la tensión de rotura
del cable o del fusible para cada velero, datos aportados por el fabricante.
Después de hacer uso de él, se saca la conclusión ya repetida varias veces a lo largo de este trabajo,
que es la gran influencia de las variables de entrada al resultado del problema, siendo necesaria una
actuación muy fina para conseguir buenos resultados.
La variable más crítica del control es el coeficiente de sustentación en cada momento. Se puede
observar en la simulación, como la velocidad depende muy fuertemente de este parámetro, pero a su
vez, su influencia varía en función de la fase donde se encuentre el velero.
Por ejemplo, en el instante de rotación, un aumento de palanca no supone un descenso de la
velocidad, como ocurre en cualquier avión, por el contrario, este experimenta una subida de
velocidad, debido al efecto “látigo” que ya se explicó al comienzo de esta memoria.
Una vez que el velero se encuentra en la fase de ascenso hay que tener un control muy fino de la
palanca para mantener la velocidad dentro de los márgenes óptimos.
Por último, indicar, que el simulador parará el lanzamiento en los siguientes cuatro casos:
Rotura de cable (tensión alcanza el límite para el fusible usado)
Velocidad de remolque máxima superada
Factor de carga máximo superado
Ángulo de suelta superado
Los datos límites, son aportados por el fabricante y dependerán exclusivamente del velero usado en
el simulador.
7.2 Calculador de performances para cada velero y condiciones
Otra aplicación que se ha desarrollado del modelo creado es un calculador de performances de
lanzamientos. No debe confundirse este punto con el tratado en el análisis de performances de los
veleros. En este, se calculará el resultado que se puede obtener usando un determinado velero en
unas determinadas condiciones del lanzamiento. El estudio de performances del capítulo anterior
tenía como objetivo descubrir la relación de las variables más importantes del problema, pudiendo
así, entender el funcionamiento del sistema de estudio e intentando encontrar una ley que optimizara
el lanzamiento.
Como se dijo en el apartado de estudio de operación del sistema de puesta en vuelo mediante torno,
es imposible a día de hoy prever el resultado que se obtendrá de un lanzamiento, en función de las
características del velero o las condiciones atmosféricas de cada día. El calculador desarrollado,
permite conocer sin necesidad de hacer el lanzamiento en la realidad, datos como la altura final
conseguida, tiempo que puede durar el lanzamiento o factores de carga alcanzados.
Esta aplicación usa el modelo creado para velocidad y tensión constantes desarrollado en el capítulo
anterior. Esto quiere decir, que se elimina del calculador, la actuación del piloto y del tornero.
Debido a que el objetivo de esta mejora es obtener a priori, los valores que podemos alcanzar en un
lanzamiento, se ha decidido hacerlo así. De esta forma, no se dependerá de la “pericia” que tenga el
tornero o piloto y se hacen dos suposiciones:
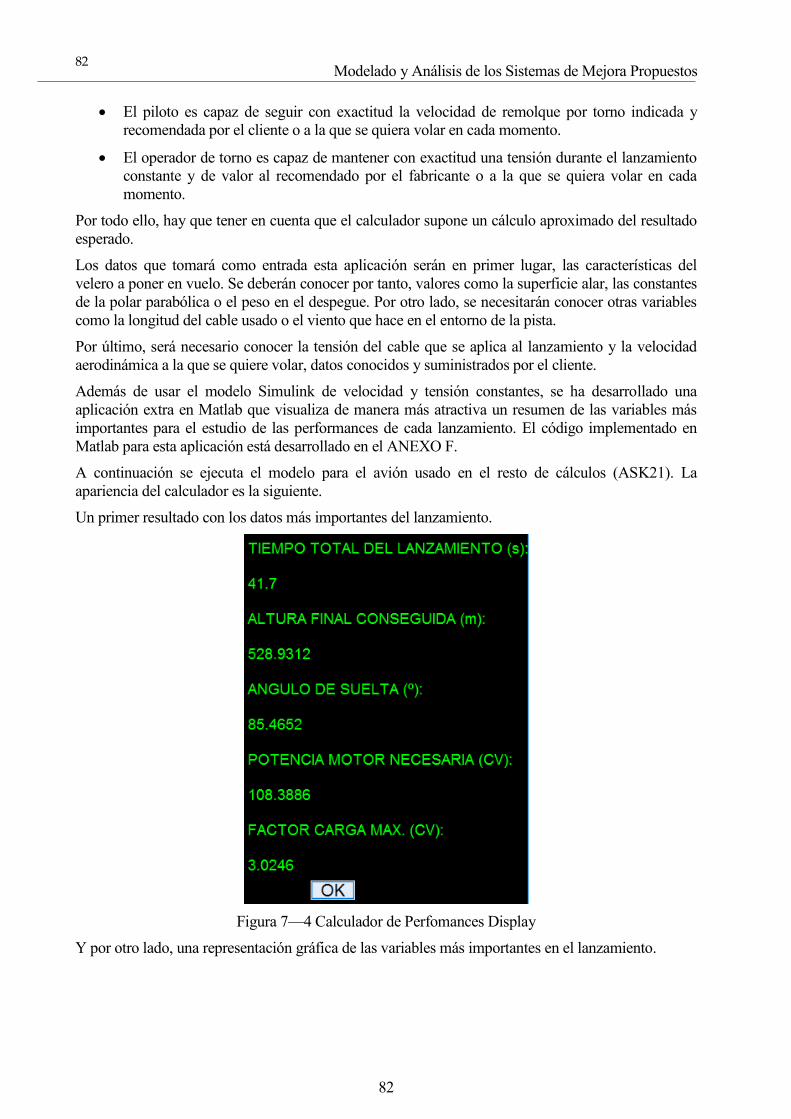
Modelado y Análisis de los Sistemas de Mejora Propuestos
82
82
El piloto es capaz de seguir con exactitud la velocidad de remolque por torno indicada y
recomendada por el cliente o a la que se quiera volar en cada momento.
El operador de torno es capaz de mantener con exactitud una tensión durante el lanzamiento
constante y de valor al recomendado por el fabricante o a la que se quiera volar en cada
momento.
Por todo ello, hay que tener en cuenta que el calculador supone un cálculo aproximado del resultado
esperado.
Los datos que tomará como entrada esta aplicación serán en primer lugar, las características del
velero a poner en vuelo. Se deberán conocer por tanto, valores como la superficie alar, las constantes
de la polar parabólica o el peso en el despegue. Por otro lado, se necesitarán conocer otras variables
como la longitud del cable usado o el viento que hace en el entorno de la pista.
Por último, será necesario conocer la tensión del cable que se aplica al lanzamiento y la velocidad
aerodinámica a la que se quiere volar, datos conocidos y suministrados por el cliente.
Además de usar el modelo Simulink de velocidad y tensión constantes, se ha desarrollado una
aplicación extra en Matlab que visualiza de manera más atractiva un resumen de las variables más
importantes para el estudio de las performances de cada lanzamiento. El código implementado en
Matlab para esta aplicación está desarrollado en el ANEXO F.
A continuación se ejecuta el modelo para el avión usado en el resto de cálculos (ASK21). La
apariencia del calculador es la siguiente.
Un primer resultado con los datos más importantes del lanzamiento.
Figura 7—4 Calculador de Perfomances Display
Y por otro lado, una representación gráfica de las variables más importantes en el lanzamiento.

83
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 7—5 Calculador de Performances Evolución Variables
Como se puede observar, el calculador aporta los siguientes datos: tiempo total del lanzamiento,
altura final conseguida, ángulo de suelta del cable, potencia de motor necesaria, factor de carga
máximo.
En definitiva, esta aplicación supone el conocer para un velero dado y unas condiciones concretas,
los resultados de las variables de forma clara y rápida.
Por otro lado, recordando que la entrada del modelo usado eran tensión y velocidad, se podría
calcular que par de valores hacen que el lanzamiento sea óptimo, aunque como ya se ha visto, la
tensión interesa que sea lo más grande posible.
Sí sería muy útil, usar este calculador, para comprobar cómo se ve penalizado la altura conseguida
con el cambio de esta variable, la tensión, que al fin y al cabo, supone en gran medida, el nivel de
agresividad del lanzamiento, tanto para la actuación del tornero como la del piloto.
7.3 Lanzamiento con sistema de control de tensión
El siguiente apartado, pretende cumplir con el último objetivo del trabajo que recordando, era
demostrar, que es posible, modelar un sistema de control automático que sea capaz de controlar la
tensión del cable en cada instante del lanzamiento y que sea la que interese en cada caso.
En el apartado anterior, se suponía que el operador de torno, era capaz de mantener una tensión del
cable constante a lo largo del lanzamiento. Como se explicó al principio del trabajo, esto no ocurre
tan fácilmente, ya que el operador no tiene realimentación del estado del cable y que se mantenga o
no un valor aceptable de tensión, dependerá de la experiencia del operador.
Sería de gran ayuda, implementar en cada torno usado un sistema de control automático que sea
capaz de calcular la demanda que hay que aportarle al motor en cada instante (acelerador) para que la
tensión se mantenga en el valor deseado.

Modelado y Análisis de los Sistemas de Mejora Propuestos
84
84
Se decide entonces, volver de nuevo al modelo Simulink completo, en el que se tiene todos los
subsistemas entrelazados entre sí.
En el siguiente modelo se ve la modificación que se le ha hecho al modelo original.
Figura 7—6 Modelo Simulink Controlador de Tensión
La única novedad es el bloque de color amarillo, que representa un controlador automático tipo PID.
Dicho controlador, es realimentado con el error que se comete en cada instante de tiempo para la
tensión resultante en el cable.
Se han ajustado los parámetros manualmente hasta conseguir el siguiente resultado. Después de
muchas pruebas, se observa que es suficiente contando con la parte integradora del PID, por lo que la
expresión del calculador queda:
1
( ) ( )u t I e ts
(6.15)
donde 0,002I .
El controlador se basa entonces en una simple variación de la señal acelerador en función del error
cometido. Si el error es cero en algún instante, la señal del acelerador se mantiene constante. Por otro
lado, si se observa que la tensión en el cable es menor a la deseada, el error saldrá positivo y se
convertirá en una variación positiva de la señal. En el caso contrario ocurrirá a la inversa.
Ese sencillo controlador es capaz, como se verá a continuación, de controlar la tensión en todo
instante del lanzamiento.
A continuación se representa la evolución de la tensión en el tiempo.
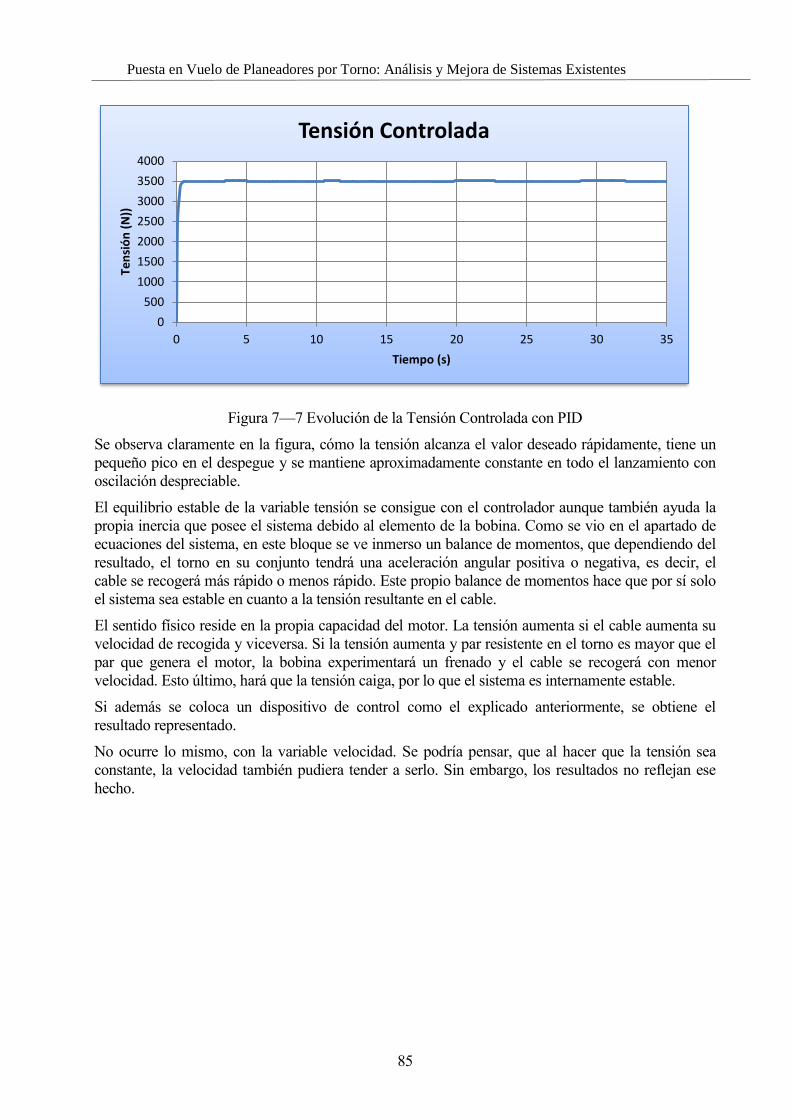
85
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Figura 7—7 Evolución de la Tensión Controlada con PID
Se observa claramente en la figura, cómo la tensión alcanza el valor deseado rápidamente, tiene un
pequeño pico en el despegue y se mantiene aproximadamente constante en todo el lanzamiento con
oscilación despreciable.
El equilibrio estable de la variable tensión se consigue con el controlador aunque también ayuda la
propia inercia que posee el sistema debido al elemento de la bobina. Como se vio en el apartado de
ecuaciones del sistema, en este bloque se ve inmerso un balance de momentos, que dependiendo del
resultado, el torno en su conjunto tendrá una aceleración angular positiva o negativa, es decir, el
cable se recogerá más rápido o menos rápido. Este propio balance de momentos hace que por sí solo
el sistema sea estable en cuanto a la tensión resultante en el cable.
El sentido físico reside en la propia capacidad del motor. La tensión aumenta si el cable aumenta su
velocidad de recogida y viceversa. Si la tensión aumenta y par resistente en el torno es mayor que el
par que genera el motor, la bobina experimentará un frenado y el cable se recogerá con menor
velocidad. Esto último, hará que la tensión caiga, por lo que el sistema es internamente estable.
Si además se coloca un dispositivo de control como el explicado anteriormente, se obtiene el
resultado representado.
No ocurre lo mismo, con la variable velocidad. Se podría pensar, que al hacer que la tensión sea
constante, la velocidad también pudiera tender a serlo. Sin embargo, los resultados no reflejan ese
hecho.
0
500
1000
1500
2000
2500
3000
3500
4000
0 5 10 15 20 25 30 35
Ten
sió
n (
N))
Tiempo (s)
Tensión Controlada

Modelado y Análisis de los Sistemas de Mejora Propuestos
86
86
Figura 7—8 Perfil de Velocidad con Control de Tensión
Se observa como la velocidad sigue oscilando y no se llega al mismo resultado que con la tensión. La
inestabilidad de esta variable se debe a su gran dependencia con el coeficiente de sustentación
aplicado. Debido a esta fuerte dependencia, sería difícil, controlar esta variable sin relacionarlas.
Podría estudiarse la implementación de otro controlador aplicado a la entrada del LC con el objetivo
de controlar la velocidad. Sin embargo, se decide no hacerlo ya que en la naturaleza del deporte, es el
piloto quien tiene la misión de controlar este parámetro y no tiene lógica intentar hacerle su trabajo.
En definitiva, podría desarrollarse un sistema automático de control, para regular la potencia que
demanda el sistema motor y así aliviar de trabajo o incluso sustituir la operación del tornero.
Para poder llevar esto a la realidad, sería necesario además del diseño del controlador, dotar al
sistema de sensores que sean capaces de realimentar a este controlador en cuanto a la tensión del
cable se refiere. Sería necesario pues, idear un sistema a modo de tensiómetro que calcule la tensión
del cable en la zona del fusible (zona donde el cable posee mayor tensión). Además de calcularla, el
dispositivo tendría que ser capaz de mandar una señal inalámbrica a la cabina de operación de torno,
donde se encontraría instalado el controlador.
0
20
40
60
80
100
120
140
0 5 10 15 20 25 30 35
Ve
loci
dad
(K
m/h
)
Tiempo (s)
Velocidad Resultante con Control de Tensión

87
8 CONCLUSIONES
n este último capítulo se pretende poner en pie todos los resultados obtenidos. Por un lado,
comentar cómo han funcionado o no las mejoras desarrolladas y cómo impactarían las mismas,
al deporte del Vuelo a Vela. Por otro lado, se comentará de forma global el sentido de los
resultados obtenidos en el análisis de performances realizado.
8.1 Conclusiones del análisis de las variables
En el capítulo dedicado a ello, se ha observado la evolución de las variables de estado en función de
los parámetros de entrada, tanto en el sistema completo con leyes de control fijadas como en el
sistema aproximado de velocidad constante y ley de tensión fijada.
En los resultados se ve una clara diferencia y es que en el sistema completo, las variables resultantes
son mucho más irregulares, con oscilaciones, picos, etc. Esto se debe a que las leyes han sido
predeterminadas y fijadas de manera independiente, de tal forma que el sistema actúa en bucle
abierto. En la realidad, sería difícil, definir una ley de control al motor sin saber cómo va a reaccionar
el velero. Por otro lado, también sería complicado, aportar al velero una ley de control de palanca, sin
saber cómo va a actuar el torno en todo momento. Este hecho, sumado a la alta dependencia que
tienen las variables de estado con las variables de entrada, hace que los resultados puedan tener este
tipo de irregularidades.
A pesar de ello, se han definido unas leyes de control, basadas en la experiencia con el uso del
modelo implementado, pero se debe mencionar, que por el camino se han obtenido resultados muy
dispares, haciendo ver la fuerte variabilidad de la solución en función de la compenetración de las
dos variables de entrada.
Esto no quiere decir, que sea imposible encontrar una actuación sobre el sistema que sea capaz de
extraer un resultado suave de las variables, como sería una velocidad y tensión constantes en todo el
lanzamiento.
De hecho en el simulador, que no es más que el mismo sistema completo, pero con leyes definidas
en cada instantes por el usuario y realimentadas por la propia evolución del sistema, se pueden
conseguir buenos resultados, aunque como ya se ha mencionado, es complejo y depende mucho de la
experiencia de cada usuario, nada más lejos de la realidad.
En el sistema con velocidad constante, y entrada tensión del cable, se elimina toda la dependencia
con los sistemas que no son el propio velero. Es decir, aquí el sistema se estudia desde los resultados.
En cierta medida, este estudio, sería el análisis de la evolución de las variables que se deberían
aportar al sistema, para conseguir velocidad y tensión constantes y dentro de los márgenes deseados.
Es por ello, que las variables de salida son suaves y sin irregularidades.
E

Conclusiones
88
88
8.2 Conclusiones del estudio de performances
En el análisis de las variables del sistema y su evolución en función de las variables de entrada, se
tiene una primera visión de cómo pueden ser los resultados obtenidos en una puesta en vuelo de
veleros. Sin embargo, habría que hacer decenas de pruebas con diferentes leyes de operación para
ver como varían los resultados en función de dichas leyes.
Se decidió por tanto hacer un estudio de performances, reduciendo el problema a una única ecuación,
que engloba las variables más importantes del problema, haciendo una previa hipótesis (sistema
cuasi-estacionario).
Este estudio permite ver con rapidez la dependencia y relación entre las variables más importantes
del problema.
Se ha visto, como el ratio de ascenso (ROC), aumenta siempre con la tensión del cable aplicada al
igual que con la velocidad de vuelo. Por lo que, si se quiere ascender de forma rápida, interesará
tensión y velocidad máximas, definidas por el fabricante.
Por otro lado, se observa que a diferencia del ratio de ascenso, el ángulo con el que se sube o asiento,
tiene unos máximos en función de la velocidad de vuelo elegida. Es mayor cuanto mayor es la
tensión del cable pero hay valores de la velocidad de vuelo que consigue un máximo para esta
variable. A pesar de ello, se observa como variando la velocidad entorno al punto óptimo, no se
observan grandes variaciones del ángulo, por lo que mientras el velero se mueva en el rango
aportado por el fabricante, tendrá un ascenso óptimo.
En resumen, a más velocidad, mayor velocidad de ascenso, pero hay una ley óptimo de velocidades
que hace que el ángulo de subida sea siempre el máximo, maximizando así, la altura final
conseguida.
Si recordamos el valor que hacía que la eficiencia del velero era máxima, estaba en torno a 90 km/h,
algo menor a los valores obtenidos como óptimos en el estudio de performances. Este valor se
corresponde con el que hace que el velero vuele con un ángulo de planeo máximo, es el punto de
trabajo donde el velero es más eficiente aerodinámicamente.
Se puede entender, que en el resultado del ascenso óptimo, este valor de la velocidad óptima puede
haber sufrido un incremento debido a la aportación de la tensión del cable, la cual, permite que el
velero sea eficiente a unas velocidades un poco mayores, aunque no muy lejanas, teniendo en cuenta,
que el velero puede volar hasta casi los 300 km/h.
En definitiva, este estudio, supone un gran avance en el mundo del vuelo a vela, ya que a pesar de la
importancia del asunto, no existe casi nada de información acerca de estos escasos segundos que
conlleva la puesta en vuelo.
Con él, cada interesado podría ver cuál es el mapa de performances de su velero en la puesta en
vuelo, en función de la tensión que desee aplicar y los parámetros propios de su velero.
Hay que recalcar, que siempre se ha obtenido como resultado que la tensión siempre maximiza el
resultado del lanzamiento. Esto es obvio, pero cabe indicar, que el valor de la tensión está
relacionado fuertemente con el valor del factor de carga experimentado en el velero.
Se deja a elección del piloto a remolcar la elección del factor de carga que desea experimentar, en
función de su experiencia, condiciones físicas, etc.

89
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
8.3 Resultados obtenidos con las aplicaciones desarrolladas
A continuación, se comentará como han sido los resultados de las aplicaciones desarrolladas y sobre
todo, como pueden impactar al deporte del vuelo a vela.
Calculador
Con esta aplicación se ha conseguido de manera rápida y sencilla averiguar cuales podrán ser los
resultados de una puesta en vuelo aportados los parámetros del velero a usar y las condiciones de
remolque (tensión y velocidad deseadas).
Es importante saber, que esta aplicación no le da información al tornero de cómo debe actuar sobre el
torno para conseguir los valores calculados, si no que supone que el tornero es capaz de mantener la
tensión deseada en todo momento.
Dependiendo de si el piloto y el operador de torno pudieran hacer un lanzamiento en el que se
consigan los valores de tensión y velocidad considerados, se conseguirán en mayor o menor medida
los resultados finales calculados previamente en el calculador.
A pesar de no aportar a los usuarios información de cómo se debe proceder, es un avance importante
el conocer a qué velocidad se debería volar para llegar a la altura que se desea.
Este sencillo calculador podría ser usado en escuelas de vuelo a vela previamente a cada
lanzamiento, haciendo un estudio de los valores que se desean y los valores necesarios para llegar a
ello.
A día de hoy, es imposible conocer dichos resultados sin realizar el lanzamiento.
Simulador
Existen en la actualidad muchos simuladores de vuelo, en los que se puede escoger sin ningún tipo
de problema un avión del tipo velero y volar con él. Sin embargo, es difícil encontrar un simulador
que incluya el proceso de puesta en vuelo y más aún, que contemple la operación del tornero en cada
instante.
Es por ello, que se considera un gran avance el desarrollo de este simulador. Después de hacer uso de
él se ha observado que es bastante realista (comprobado con personas que han experimentado alguna
vez un lanzamiento por torno).
Este simulador, permite de manera 100% segura, ya que no se expone a la situación real, practicar un
lanzamiento y entender el funcionamiento del mismo en cada fase del ascenso, tanto para el piloto a
remolcar como para el operador de torno.
Se decía en esta memoria, que los resultados obtenidos en la puesta en vuelo de veleros, dependía
exclusivamente de la experiencia de las personas involucradas, siempre con el riesgo de sufrir una
rotura de cable que ponga en peligro la integridad de la aeronave o el piloto. A día de hoy, la única
forma de adquirir experiencia sería practicando en la realidad lanzamientos de este tipo. Por lo que el
desarrollo del simulador, supondría una gran mejora para los clubes de vuelo a vela, de cara a
experimentar a sus operadores de torno o pilotos.
Es cierto que esto es un primer desarrollo y se han hecho hipótesis que pueden alejar el modelo de la
realidad, sin embargo, es suficiente para tener un primer contacto con este tipo de sistemas sin
necesidad de recurrir a la práctica real.
Controlador de tensión
Se han mostrado evidencias de que es posible implantar un controlador automático que regule la
tensión del cable en todo momento, actuando sobre el acelerador del motor.
Esto reduciría la operación del tornero, evitando así que el resultado del lanzamiento dependa de la

Conclusiones
90
90
experiencia del mismo.
Recordando el alcance del trabajo, se limita el diseño del controlador de manera matemática. Sería
mucho más complejo implantarlo en la realidad, asunto que se discutirá en el siguiente apartado.
La conclusión adicional que se extrae de esta aplicación es que aunque se consiga controlar la
tensión, la velocidad experimentada del velero se puede volver inestable.
Se ha comentado ya en varias ocasiones, que las variables de estado del problema dependen
fuertemente de las variables de entrada y no de manera independiente. Es decir, dependerán del
acople de cada variable de entrada de manera conjunta.
Como conclusión final se puede decir que el sistema completo es altamente complejo, en el sentido
de la evolución de las variables de estado. Es muy difícil, definir unas leyes de control
predeterminadas que consigan un buen resultado del proceso sin ninguna realimentación y por tanto
debe ser el operador de torno y el piloto los que en cada momento de la puesta en vuelo, aporten los
valores de entrada adecuados al sistema para controlar las variables de estado más importantes, como
la velocidad o la tensión del cable. Una vez más, recalcando la importancia de la experiencia de los
mismos.
A pesar de esa dificultad, se considera que han sido suficientemente cumplidos los objetivos del
trabajo, en los que se pedía un análisis del sistema completo y la mejora de alguno de los sistemas
involucrados. Se ha considerado que el mejorar los sistemas involucrados consiste en conocer de
mejor manera como funciona todo el proceso y como se puede aportar información a los usuarios de
cómo proceder para conseguir un lanzamiento seguro a la vez que óptimo.
Además, con el desarrollo en este trabajo del calculador y simulador, se tiene un avance muy
importante en el deporte del vuelo a vela. Seguro que cualquier deportista estaría encantado de
conocer y usar.
8.4 Tendencias futuras
Se ha visto en todo el trabajo, que la manera de conseguir un lanzamiento óptimo es controlar las
variables de velocidad de vuelo y tensión en cada momento. Es por ello, que una posible mejora
futura podría ser, dotar al tornero de instrumentación adicional como podría ser el valor de la tensión
del cable en cada momento, de esta forma, sabría de qué manera debe variar la solicitud de potencia
al motor del torno, para así bajar o subir revoluciones.
No se valora hacer lo mismo con el piloto, ya que si se hace lo mismo con ambas personas, se podría
llegar a una solución inestable del problema, queriendo los dos corregir o mejorar el valor de la
tensión al mismo tiempo. Además, el piloto debe estar concentrado en mantener el velero estable en
la subida y pendiente de la velocidad que le marca el anemómetro.
En cuanto al tema operacional, nuevamente, se llega a la conclusión de que la eficiencia del
lanzamiento, depende de la experiencia o pericia del tornero y piloto, teniendo ambos, pocos
sistemas que le ayuden a conocer la mejor forma de proceder.
Se propone pues, incrementar aún más la instrumentación de la que dispone el tornero. Además de
aportarle el valor de la tensión del cable, se le podría también aportar el valor de la velocidad
aerodinámica del velero en cada momento de forma directa y en tiempo real. De esta forma se
elimina la necesidad de que el piloto tenga que estar “cantando” la velocidad al tornero o que
simplemente el tornero tenga que intuir la velocidad a la que va volando.
Puede parecer poca mejora, pero el hecho de aportarle al operador de torno, los datos de tensión y
velocidad en cada instante, supone la no necesidad, o simplemente, la reducción de la experiencia
necesaria. A día de hoy, como se ha recalcado en este trabajo, este es uno de los problemas que
tienen la mayoría de los clubes de vuelo a vela, no todos disponen de personas con el suficiente

91
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
conocimiento de la actividad como para poder proceder a realizar un remolque. En ocasiones, sí que
se dispone de ella, pero dependen de su presencia para poder volar. Este es una de las razones de
mayor peso por la que los clubes prefieren usar el remolque por avioneta, aun siendo este último,
mucho más caro que la opción del torno.
Con esta aportación se conseguiría que cualquier persona, habiendo realizado su curso de operador
de torno correspondiente, pueda sin necesidad de tener experiencia, proceder a realizar un
lanzamiento con éxito.
Además de ello, podría considerarse como objetivo futuro, el mejorar todo modelo matemático del
sistema, eliminando las hipótesis consideradas, como la del vuelo en plano vertical. Se conseguiría
así estudiar el comportamiento del sistema ante resbalamiento por ejemplo.
El modelado del sistema motor torno, sería el que tendría mayor margen de mejora ya que se han
hecho muchas suposiciones, siendo la más importante, el hecho de que el motor tiene respuesta
inmediata, no siendo así en la realidad y provocando quizás, las oscilaciones debido a la falta de
amortiguamiento, que aparecían en algunos estudios del sistema. Se propone por ejemplo, dotar al
motor de un amortiguamiento de tipo viscoso que dependa de la velocidad de rotación en cada
instante, además de crear un retardo en la respuesta del motor debido a efectos de la combustión del
mismo.
Por último, se podría desarrollar un dispositivo a modo de controlador automático y ver en qué
medida es cierto que el sistema pueda tener un control de la tensión del cable.
Usando la variable de tensión en todo momento en la parte del cable más próxima al velero (mayor
tensión debido al peso), se podría realimentar dicho dispositivo para variar en la medida considerada
la posición del acelerador del motor usado, aumentando o disminuyendo la demanda del mismo.

Conclusiones
92
92

93
ANEXOS
ANEXO A
Código usado en Matlab para el cálculo de la curva catenaria.
%% Cálculo de catenarias a lo largo del lanzamiento
N=length(tension); lambda=0.008;%datos_torno(6); deflexionreal=zeros(1,N-100); deflexionideal=zeros(1,N-100); for j=[100:N] T=tension(j); h1=altitud(j); x1=alcance(j); angulo_cable=elevacion(j);
[y,x,delta]=calculocatenaria(h1,x1,T,angulo_cable,lambda); deflexionideal(1,j-99)=h1/x1; deflexionreal(1,j-99)=delta; % plot(x,y,'r') % hold on % plot([0,x1],[0,h1]) end
% plot(alcance,deflexionideal*180/pi,'r') % hold on % plot(alcance,deflexionreal*180/pi) diferencia=deflexionreal-deflexionideal; plot(deflexionreal*180/pi,diferencia*180/pi,'r') hold on
function [y,x,delta]=calculocatenaria(h1,x1,T,angulo_cable,lambda)
%h1=5; x1=950.3; T=3551.6; elevacion=0.3016*pi/180; lambda=0.08; a=T*cos(angulo_cable)/lambda; fun=@(c)a.*cosh(-c./a)+h1-a.*cosh((x1-c)/a); C1=fzero(fun,1);
C2=-a*cosh(C1/a);
x=[0:1:x1]; N=length(x); y=zeros(1,N); for j=[1:N]
if a*cosh((x(j)-C1)/a)+C2 < 0
y(j)=0;
else y(j)=a*cosh((x(j)-C1)/a)+C2; end end N1=length(y); delta=(y(N)-y(N-1))/(x(N)-x(N-1));
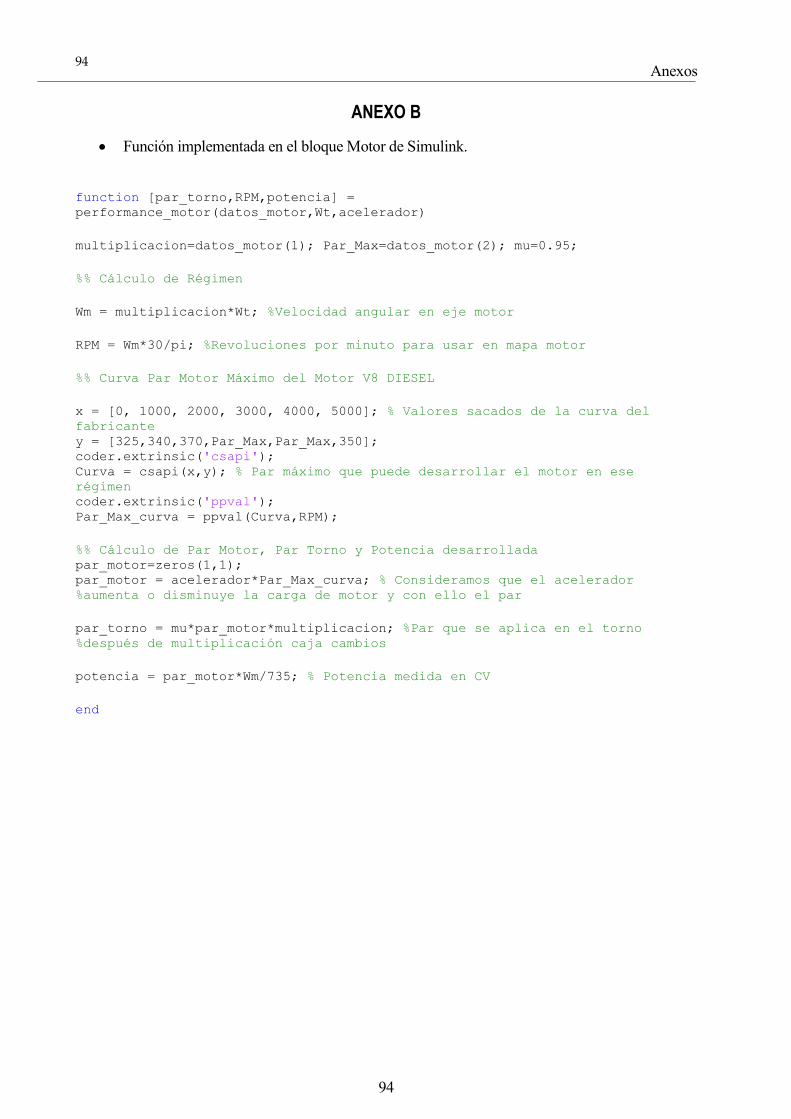
Anexos
94
94
ANEXO B
Función implementada en el bloque Motor de Simulink.
function [par_torno,RPM,potencia] =
performance_motor(datos_motor,Wt,acelerador)
multiplicacion=datos_motor(1); Par_Max=datos_motor(2); mu=0.95;
%% Cálculo de Régimen
Wm = multiplicacion*Wt; %Velocidad angular en eje motor
RPM = Wm*30/pi; %Revoluciones por minuto para usar en mapa motor
%% Curva Par Motor Máximo del Motor V8 DIESEL
x = [0, 1000, 2000, 3000, 4000, 5000]; % Valores sacados de la curva del
fabricante y = [325,340,370,Par_Max,Par_Max,350]; coder.extrinsic('csapi'); Curva = csapi(x,y); % Par máximo que puede desarrollar el motor en ese
régimen coder.extrinsic('ppval'); Par_Max_curva = ppval(Curva,RPM);
%% Cálculo de Par Motor, Par Torno y Potencia desarrollada par_motor=zeros(1,1); par_motor = acelerador*Par_Max_curva; % Consideramos que el acelerador %aumenta o disminuye la carga de motor y con ello el par
par_torno = mu*par_motor*multiplicacion; %Par que se aplica en el torno %después de multiplicación caja cambios
potencia = par_motor*Wm/735; % Potencia medida en CV
end

95
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
ANEXO C
Función implementada en el bloque Torno de Simulink.
function w_prima = performance_torno(datos_torno,Qt,T,longitud_cable)
radio=datos_torno(1); masa_torno=datos_torno(2); diametro_cable=datos_torno(3); long_inicial=datos_torno(4); masa_longitud=datos_torno(5);
%% Calculo Inercias
masa_cable = masa_longitud*(long_inicial - longitud_cable+100);
I_bobina = 0.5*masa_torno*radio^2;
I_cable = 0.5*masa_cable*(radio^2 + (radio+diametro_cable)^2);
I_torno = I_bobina + I_cable;
%% Balance de Momentos que actúan en el eje
w_prima = (Qt - T*radio)/I_torno;

Anexos
96
96
ANEXO D
Función implementada en el bloque Velero/Cable de Simulink.
function
[tension,V_prima,asiento_prima,elevacion_prima,Factor_carga,h_prima,alcance_p
rima,w]=ModeloVelero(datos,V,CL,asiento,elevacion,aceleracion_cable,R,h)
m=datos(1); S=datos(2); CD0=datos(3); k=datos(4); w0=datos(5);
%% Modelo Atmósfera at=0.1; %Coeficiente en funcion del terreno para el perfil de viento
Cr=0.0055; %Coeficiente de rodadura mu=0.2; %Coeficiente de fricción del cable-suelo d=0.008; %Densidad lineal cable w=w0*((h)/10)^at; %Viento con gradiente vertical g=9.81; T0=25+273.14; rho0=1.29; Rgases=287; a=-6.5e-3; %Calculos Atmósfera
ISA T=T0+a*h; rho=rho0*(T/T0)^(-g/a/Rgases-1);
%% Modelo Aerodinámico CD=CD0+k*CL^2; %polar parabolica de coeficientes constantes L=0.5*rho*V^2*S*CL; D=0.5*rho*V^2*S*CD; W=m*g; Factor_carga=L/W; %% Otros cálculos previos seno=sin(asiento+elevacion); coseno=cos(asiento+elevacion); tangente=tan(asiento+elevacion); Fr=Cr*W; Fa=mu*R*d; %% Tramo de Rodaje
if Factor_carga<=1 && h<=0
V_prima=-aceleracion_cable;
tension=D+m*V_prima+Fr+Fa;
asiento_prima=0;
elevacion_prima=0;
alcance_prima=-V+w;
h_prima=0;
else
%% Velero en el aire
A=[m*tangente m*V 0 0 0; 0 0 R 0 0; coseno -V*seno w*sin(elevacion)-V*... seno 0 0; 0 0 0 1 0; 0 0 0 0 1]; B=[L-D*tangente-m*g*cos(asiento)-m*g*sin(asiento)*tangente; V*seno-w*sin... (elevacion); -aceleracion_cable; w-V*cos(asiento); V*sin(asiento)];
Vector_estado_prima=A\B; % Resolución del sistema para cálculo de derivadas

97
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
V_prima=Vector_estado_prima(1);
asiento_prima=Vector_estado_prima(2);
elevacion_prima=Vector_estado_prima(3);
alcance_prima=Vector_estado_prima(4);
h_prima=Vector_estado_prima(5);
tension=(D+m*V_prima+W*sin(asiento))/coseno;
end end

Anexos
98
98
ANEXO E
Función implementada en el bloque Velero/Cable de Simulink para V y T constantes.
function
[CL,R_prima,asiento_prima,elevacion_prima,Factor_carga,h_prima,alcance_prima,
w,Potencia]=ModeloVelero(datos,T,V,asiento,elevacion,R,h)
m=datos(1); S=datos(2); CD0=datos(3); k=datos(4); w0=datos(5); Vs=69/3.6;
%% Calculos atmosféricos at=0.1; %Coeficiente en funcion del terreno para el perfil de viento g=9.81; T0=25+273.14; rho0=1.29; Rgases=287; a=-6.5e-3; %Calculo ISA Tem=T0+a*h; rho=rho0*(Tem/T0)^(-g/a/Rgases-1);
%% Cálculos previos W=m*g; w=w0*((h)/10)^at; %Viento con gradiente vertical seno=sin(asiento+elevacion); coseno=cos(asiento+elevacion); CL=sqrt(2/k/rho/V/V/S*(T*coseno-W*sin(asiento))-CD0/k); CLmax=2*W/rho/S/(Vs^2); if CL > CLmax %Si volamos a más del CLmax, lo taramos CL=CLmax; end L=0.5*rho*V^2*S*CL; Factor_carga=L/W;
%% Cálculo de variaciones de variables de estado asiento_prima=(L-W*cos(asiento)-T*seno)/m/V;
elevacion_prima=(V*seno-w*sin(elevacion))/R;
R_prima=w*cos(elevacion)-V*coseno;
alcance_prima=-V*cos(asiento)+w;
h_prima=V*sin(asiento);
Potencia=-T*R_prima;
end

99
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
ANEXO F
Código de Matlab usado para análisis de Performance del Velero en estático.
close all clear all Tension=[2500:1500:10000]; elevacion=[5:15:80]*pi/180; Emax=31; Vemax=90/3.6; WSemax=31*9.81; Vs=69/3.6; Vwmax=150;%% Valores
fabricante col=[0.2,0.3,0.4,0.5,0.6,0.7]; %% Para pintar gráficas
%% Calculo Coeficientes Polar Parabólica ka=0.5*1.29*17.95; W=558*9.81; CLopt=2*WSemax/1.29/(Vemax^2); CLmax=2*WSemax/1.29/(Vs^2); k=0.5/Emax/CLopt CDo=CLopt/2/Emax %% Mallado de Velocidad V=[50:0.02:180]/3.6; P=length(elevacion); M=length(Tension); N=length(V); %% Calculos para cada valor de Tensión for j=1:M T=Tension(j); phi=20*pi/180; clr=lines(M); for i=1:N funt=@(Vz)T.*(cos(phi)*sqrt(1-(Vz./V(i))^2)-sin(phi)*Vz./V(i))-ka*(CDo+... k*((T.*(Vz./V(i)*cos(phi)+sin(phi)*sqrt(1-(Vz./V(i)).^2))+W.*sqrt... (1-(Vz./V(i))^2))/ka./V(i).^2).^2).*V(i).^2-W*Vz./V(i); Vzt(i)=fzero(funt,1); %% Se resuelve la ecuación por iteración sengammat(i)=Vzt(i)/V(i); end [Vztmax,I]=max(Vzt); [Vsengammatmax,G]=max(sengammat); figure(1) h1(j)=plot(V*3.6,Vzt,'color',[col(7-j),col(7-j),col(7-j)],'LineWidth',1.5) hold on % plot(V(I)*3.6,Vztmax,'r.','MarkerSize',10) xlabel('V (km/h)');ylabel('ROC (m/s)'); title({'ROC -- V para \phi = 20º'}); figure(2) h2(j)=plot(V*3.6,asin(sengammat)*180/pi,'color',[col(7-j),col(7-j),... col(7-j)],'LineWidth',1.5); hold on %plot(V(G)*3.6,asin(sengammat(G))*180/pi,'r.','MarkerSize',10) xlabel('V (km/h)');ylabel('\gamma (º)'); title({'\gamma -- V para \phi = 20º'}); end figure(1) hold on plot([Vs*3.6 Vs*3.6],[0 50],'b--') plot([Vwmax Vwmax],[0 50],'r--') figure (2) hold on plot([69 69],[0 50],'b--') plot([150 150],[0 50],'r--')

Anexos
100
100
legend(h1, num2str((Tension(1:M)/max(Tension))','T=%.1f T_{FUS}')) legend(h2, num2str((Tension(1:M)/max(Tension))','T=%.1f T_{FUS}'))
%% Cálculos para cada valor de ángulo del cable for l=1:P phi=elevacion(l); T=5000; for i=1:N funt=@(Vz)T.*(cos(phi)*sqrt(1-(Vz./V(i))^2)-sin(phi)*Vz./V(i))-ka*(CDo+... k*((T.*(Vz./V(i)*cos(phi)+sin(phi)*sqrt(1-(Vz./V(i)).^2))+W.*sqrt(... 1-(Vz./V(i))^2))/ka./V(i).^2).^2).*V(i).^2-W*Vz./V(i); Vzt(i)=fzero(funt,1); sengammat(i)=Vzt(i)/V(i); end [Vztmax,I]=max(Vzt); [Vsengammatmax,G]=max(sengammat); figure(3) h3(l)=plot(V*3.6,Vzt,'color',[col(7-l),col(7-l),col(7-l)],'LineWidth',1.5); hold on %plot(V(I)*3.6,Vztmax,'r.','MarkerSize',10) xlabel('V (km/h)');ylabel('ROC (m/s)'); title({'ROC -- V para T = 5000 N'}); figure(4) h4(l)=plot(V*3.6,asin(sengammat)*180/pi,'color',[col(7-l),col(7-l),... col(7-l)],'LineWidth',1.5); hold on %plot(V(G)*3.6,asin(sengammat(G))*180/pi,'r.','MarkerSize',10) xlabel('V (km/h)');ylabel('\gamma (º)'); title({'\gamma -- V para T = 5000 N'}); end figure(3) hold on plot([Vs*3.6 Vs*3.6],[-10 50],'b--') plot([Vwmax Vwmax],[-10 50],'r--') figure (4) hold on plot([69 69],[-10 50],'b--') plot([150 150],[-10 50],'r--')
legend(h3, num2str((elevacion(1:P)/max(elevacion))','phi=%.1f phi_{MAX}')) legend(h4, num2str((elevacion(1:P)/max(elevacion))','phi=%.1f phi_{MAX}'))
%% Cálculo de V que hace gamma máximo y ROC máximo para cada phi. % Ley de Subida Máxima, Ley de Subida Más Rápida
elevacion=[5:5:75]*pi/180; %% Se mejora el mallado P=length(elevacion); for j=1:M T=Tension(j); for l=1:P phi=elevacion(l); for i=1:N funt=@(Vz)T.*(cos(phi)*sqrt(1-(Vz./V(i))^2)-sin(phi)*Vz./V(i))-ka*(CDo+... k*((T.*(Vz./V(i)*cos(phi)+... sin(phi)*sqrt(1-(Vz./V(i)).^2))+W.*sqrt(1-(Vz./V(i))^2))/ka./V(i)... .^2).^2).*V(i).^2-W*Vz./V(i); Vzt(i)=fzero(funt,1); sengammat(i)=Vzt(i)/V(i); end [sengammatmax,G]=max(sengammat); [Vztmax,K]=max(Vzt);

101
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
Vgammamax(l)=V(G); VROCmax(l)=V(K); end figure(5) h5(j)=plot(elevacion*180/pi,Vgammamax*3.6,'color',[col(7-j),col(7-j),... col(7-j)],'LineWidth',1.5); xlabel('\phi (º)');ylabel('V_{\gamma_{max}} (km/h)'); title({'V_{\gamma_{max}} -- \phi'}); hold on % figure(6) % h6(j)=plot(elevacion*180/pi,VROCmax*3.6,'color',[col(7-j),col(7-j),... % col(7-j)],'LineWidth',1.5); % xlabel('\phi (º)');ylabel('V_{ROC_{max}} (km/h)'); % title({'V_{ROC_{max}} -- \phi'}); % hold on end figure(5) hold on plot([0 90],[Vs*3.6 Vs*3.6],'b--') plot([0 90],[Vwmax Vwmax],'r--') % figure (6) % hold on % plot([0 50],[Vs*3.6 Vs*3.6],'b--') % plot([0 50],[Vwmax Vwmax],'r--') legend(h5, num2str((Tension(1:M)/max(Tension))','T=%.1f T_{FUS}')) % legend(h6, num2str(Tension(1:M)','T=%.0f N'))

Anexos
102
102
ANEXO G
Código Matlab usado para el cálculo de performances en función del velero y condiciones.
%% Función CALCULADOR DE PERFORMANCES close all % Adquisición de Variables Tiempo=Estado_Velero_CNTS(:,11); V_cable=-Estado_Velero_CNTS(:,1)*3.6; CL=Estado_Velero_CNTS(:,2); R=Estado_Velero_CNTS(:,3); Asiento=Estado_Velero_CNTS(:,4); Elevacion=Estado_Velero_CNTS(:,5); Factor_Carga=Estado_Velero_CNTS(:,6); altitud=Estado_Velero_CNTS(:,7); alcance=Estado_Velero_CNTS(:,8); %Cálculo de energía Potencia_Desarrollada=Estado_Velero_CNTS(:,10); Energia=0; for i=1:length(Potencia_Desarrollada) Energia=Energia+Estado_Velero_CNTS(i,10)*0.1; end %% Representación de datos en gráficas N=length(CL); Lc=datos(7); figure(2) subplot(2,3,1:2) grid on plot(alcance,altitud,'k','MarkerSize',4) xlabel('Pista (m)');ylabel('Altura (m)'); title({num2str(altitud(N),'Trayectoria -- h_m_a_x=%.0f m')}); hold on X=[0 alcance(N)];Z=[0 altitud(N)]; plot(0,0,'k.','MarkerSize',20) plot(alcance(N),altitud(N),'r<','MarkerSize',10) line(X,Z) suelo=area([-Lc*0.8 Lc],[-50 -50]); set(suelo, 'FaceColor', [0.78 0.39 0]); axis([-Lc*0.04,Lc,-50,altitud(N)+40]); grid on subplot(2,3,4) grid on plot(Tiempo,V_cable) xlabel('Tiempo (s)');ylabel('Velocidad Cable (km/h)'); axis([0,Tiempo(N),0,max(V_cable)+5]); title({num2str(max(V_cable),'Velocidad_{max}=%.0f km/h')}); grid on subplot(2,3,3) grid on plot(Tiempo,CL) xlabel('Tiempo (s)');ylabel('CL'); axis([0,Tiempo(N),0,max(CL)]); title({num2str(max(Factor_Carga),'Factor Carga máximo=%.2f')}); grid on subplot(2,3,5) grid on plot(Tiempo,Asiento) xlabel('Tiempo (s)');ylabel('Ángulo Asiento (º)'); axis([0,Tiempo(N),0,50]); title({num2str(Elevacion(N),'Ángulo Suelta=%.2f º')}); grid on
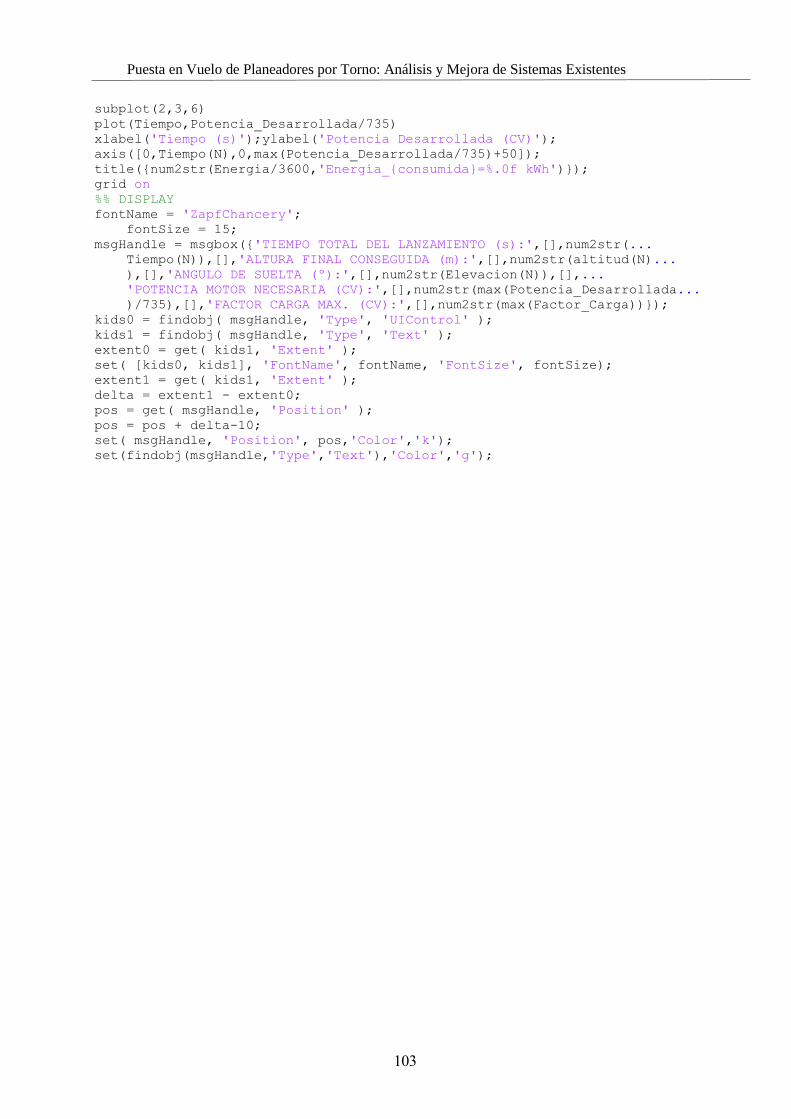
103
Puesta en Vuelo de Planeadores por Torno: Análisis y Mejora de Sistemas Existentes
subplot(2,3,6) plot(Tiempo,Potencia_Desarrollada/735) xlabel('Tiempo (s)');ylabel('Potencia Desarrollada (CV)'); axis([0,Tiempo(N),0,max(Potencia_Desarrollada/735)+50]); title({num2str(Energia/3600,'Energía_{consumida}=%.0f kWh')}); grid on %% DISPLAY fontName = 'ZapfChancery'; fontSize = 15; msgHandle = msgbox({'TIEMPO TOTAL DEL LANZAMIENTO (s):',[],num2str(... Tiempo(N)),[],'ALTURA FINAL CONSEGUIDA (m):',[],num2str(altitud(N)... ),[],'ANGULO DE SUELTA (º):',[],num2str(Elevacion(N)),[],... 'POTENCIA MOTOR NECESARIA (CV):',[],num2str(max(Potencia_Desarrollada... )/735),[],'FACTOR CARGA MAX. (CV):',[],num2str(max(Factor_Carga))}); kids0 = findobj( msgHandle, 'Type', 'UIControl' ); kids1 = findobj( msgHandle, 'Type', 'Text' ); extent0 = get( kids1, 'Extent' ); set( [kids0, kids1], 'FontName', fontName, 'FontSize', fontSize); extent1 = get( kids1, 'Extent' ); delta = extent1 - extent0; pos = get( msgHandle, 'Position' ); pos = pos + delta-10; set( msgHandle, 'Position', pos,'Color','k'); set(findobj(msgHandle,'Type','Text'),'Color','g');

Anexos
104
104

105
BIBLIOGRAFÍA
[1] E. A. S. Agency, Certification Specifications for Sailplanes and Powered Sailplanes CS-22,
2003.
[2] «Energía Eólica,» 2011. [En línea]. Available: http://energiaeolica-
walter.blogspot.com.es/2011/11/fundamentos-aerodinamicos.html.
[3] M. P. C. y. C. P. M. M.A. Gómez Tierno, Mecánica del Vuelo, Garceta, 2012.
[4] B.-. Semendiaev, Ecuación de la Catenaria. Manual de matemáticas para ingenieros y
estudiantes, Editorial Mir, Moscú..
[5] «Alexander-Schleicher,» 2016. [En línea]. Available: http://www.alexander-
schleicher.de/en/flugzeuge/ask-21/.
[6] «Alexander Schleider,» 2016. [En línea]. Available: http://www.alexander-schleicher.de/en/.
[7] «Wikipedia, the free encyclopedia,» 2016. [En línea]. Available:
https://en.wikipedia.org/wiki/LET_L-13_Blan%C3%ADk.
[8] «Stemme,» 2016. [En línea]. Available: http://www.stemme.com/.
[9] «Ruppert-Composite,» 2016. [En línea]. Available: http://www.ruppert-
composite.ch/en/flugzeug/portrait.html.
[10] «Lanzadores Skylaunch,» 2016. [En línea]. Available: http://www.skylaunchuk.com/.
[11] «Portal ayuda Matlab/Simulink,» 2016. [En línea]. Available: http://es.mathworks.com/.