tema 4: caracterización de equipos de tomografía computerizada
TRANSCRIPT

1 Fundamentos físicos y equipos
TEMA 4: Caracterización de equipos de tomografía
computerizada
1. TAC
1.1. Fundamentos
1.2. Generaciones
1.3. Elementos del TAC
1.4. TAC helicoidal y secuencial
1.5. Pitch
1.6. TAC multicorte
1.7. Formación de la imagen
1.8. Representación de la imagen. Ancho de ventana y nivel de ventana
1.9. Representación tridimensional
2. ARTEFACTOS
3. BIBLIOGRAFÍA

2 Fundamentos físicos y equipos
1. TAC
El desarrollo de las nuevas generaciones de equipos de TAC helicoidal, junto con la
mejora de los soportes informáticos, ha supuesto una espectacular evolución en el procesado
de la imagen y en la expansión de imágenes tridimensionales, generándose este tipo de
técnica en menor tiempo y con mayor resolución.
Debido a los avances que se han producido tanto en hardware como software, se logra
generar un cambio en el concepto de la tomografía.
En la actualidad, la misma no trata únicamente de la presentación de imágenes axiales
bidimensionales; sino que se pueden presentar estudios en los diferentes planos del espacio
en 2D (multiplanares-MPR), pudiendo además generar imágenes volumétricas ofreciendo
nuevas posibilidades diagnósticas y permitiendo la observación de estructuras desde infinidad
de ángulos.
1.1 Fundamentos
Mientras la mesa avanza a través de la apertura circular de la TC (gantry), el tubo
emisor de rayos X rota alrededor del paciente. Una sola rotación dura alrededor de 1 segundo.
Para cada angulación, un conjunto de detectores diametralmente opuestos al tubo registra la
radiación emergente de la sección irradiada como una radiografía instantánea. El tubo de
rayos X se diseña para dar lugar a un haz delgado, muy colimado, en forma de abanico, que
irradia la sección del cuerpo del paciente (grosor desde 1 mm hasta 10 mm). Un examen
completo comprende de 10 a 50 o más rotaciones del tubo alrededor del paciente.
1.2 Generaciones
Los primeros sistemas experimentales y su desarrollo:
Aunque Allen M. Cormack publico sus primeros resultados experimentales en 1964 en
el cual los coeficientes de atenuación del corte de un objeto fueron reconstruidos desde sus
series de proyecciones angulares, su publicación recibió poca atención en aquella época.
3 Fundamentos físicos y equipos
Algunos años después, Godfrey N. Hounsfield condujo experimentos similares, pero
mucho más extensos usando primero fuentes de radiación gamma y posteriormente una fue
de Rx.
✓ PRIMERA GENERACIÓN (TRASLACIÓN/ROTACIÓN, DETECTOR ÚNICO) O
ESCANERES DE PRIMERA GENERACIÓN (TIPO I)
A inicios de 1972 un prototipo clínico el scanner EMI para la cabeza (EMI marK I) fue
instalado en el hospital de Atkinson Morley, Londres Y probó ser un éxito inmediato con la
primera imagen clínica
Una versión mejorada fue introducida en el mercado de EU en el meeting de RSNA. El
scanner consistía en un tubo de Rx con ánodo estacionario enfriado por aceite circulante. El
haz de Rx era colimado hasta convertirlo en forma de un lápiz de allí su nombre de Haz en lápiz
y después de pasar a través de la cabeza del paciente y una bolsa de agua era detectada por un
cristal de yoduro de sodio acoplado a un tubo foto multiplicador. . Dos detectores lado a lado
con una apertura de 5 x 13 mm fueron empleados para permitir que dos cortes se obtuvieran
simultáneamente.
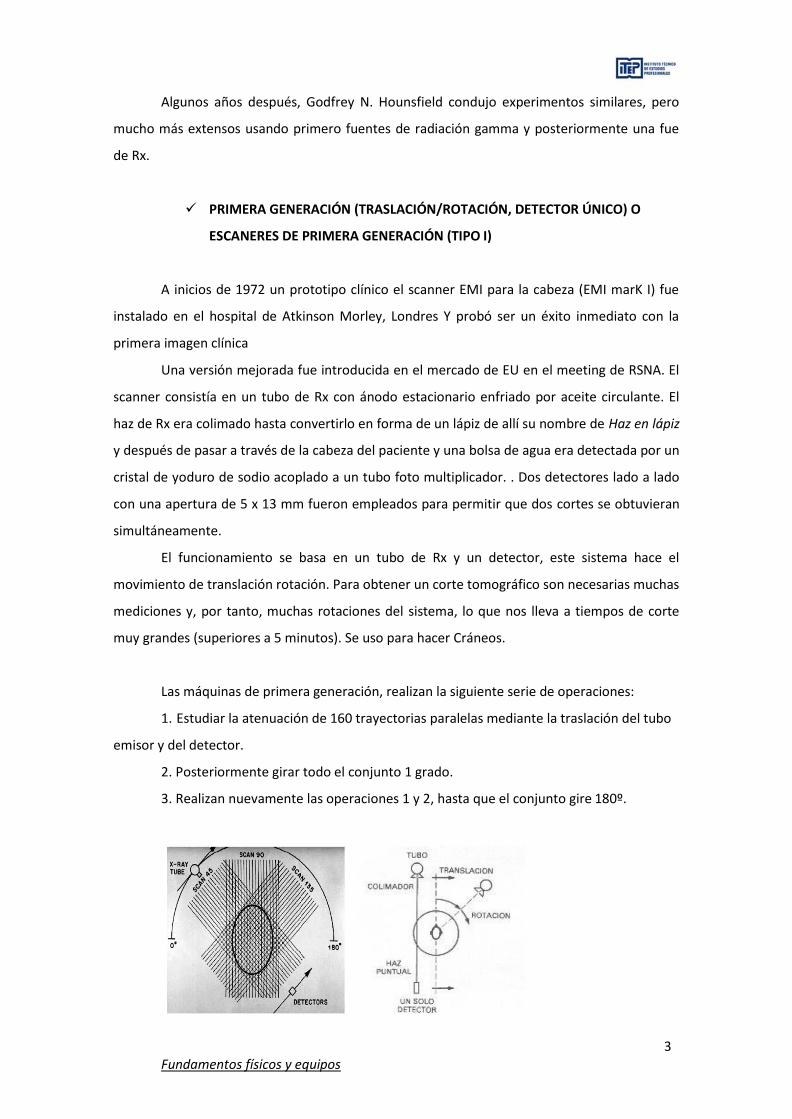
El funcionamiento se basa en un tubo de Rx y un detector, este sistema hace el
movimiento de translación rotación. Para obtener un corte tomográfico son necesarias muchas
mediciones y, por tanto, muchas rotaciones del sistema, lo que nos lleva a tiempos de corte
muy grandes (superiores a 5 minutos). Se uso para hacer Cráneos.
Las máquinas de primera generación, realizan la siguiente serie de operaciones:
1. Estudiar la atenuación de 160 trayectorias paralelas mediante la traslación del tubo
emisor y del detector.
2. Posteriormente girar todo el conjunto 1 grado.
3. Realizan nuevamente las operaciones 1 y 2, hasta que el conjunto gire 180º.

4 Fundamentos físicos y equipos
La máquina tarda unos cinco minutos en realizar la operación completa. Los datos,
previa conversión analógico-digital se almacenan en un disco. Estos datos pueden procesarse
en la computadora mientras se realiza la siguiente exploración completa. Con los resultados
obtenidos, mediante un conversor digital-analógico, se puede realizar la presentación de los
diferentes planos en una pantalla. La imagen se produce utilizando la escala de Hounsfield.
• Principio de T-R
• Haz en lápiz
• Rotación de 180º
• Time de corte: 4.5 – 5 min.
• Proceso de trasladarse-parar-rotar (180 veces)
✓ SEGUNDA GENERACIÓN (TRASLACIÓN/ROTACIÓN, MÚLTIPLES DETECTORES)
O ESCÁNERES DE SEGUNDA GENERACIÓN (TIPO II)
Aplicando estos principios para escanear el cuerpo así como la cabeza fue el siguiente
paso lógico, y condujo al desarrollo de la segunda generación el escáner EMI 5000.
Los detectores y el haz de Rx escaneaban al paciente linealmente. Cada detector
muestreaba durante el movimiento traslación arreglo tubo-detector y resultaba en 30 vistas
con 0,33° de diferencia angular entre las vistas obtenidas por los detectores vecinos. El tubo de
Rx y el arreglo de detectores deberían entonces rotar 10° y el movimiento de traslación fue
repetido.
En esta generación se utilizan varios detectores y un haz de Rx en abanico (lo que
aumentaba la radiación dispersa), con esto se consigue que el tiempo de corte se reduzca
entre 20 y 60 seg.
5 Fundamentos físicos y equipos
✓ TERCERA GENERACIÓN (ROTACIÓN/ROTACIÓN) O ESCÁNERES DE TERCERA
GENERACIÓN
En la geometría de tercera generación, los rayos de las vistas son todas adquiridas
simultáneamente.
Los scanner de tercera generación fueron maquetados por GE, Philips, Siemens,
Toshiba, Elsint y Shimatzu. El top de la línea fueron los modelos que tenían aproximadamente
750 detectores y un tiempo de scan en 360º de 2 a 4 seg.
El escáner de TC de tercera generación utiliza una disposición curvilínea que contiene
múltiples detectores y un haz en abanico. El número de detectores y la anchura del haz en
abanico, de entre 30 y 60° y el haz en abanico y la matriz de detectores permiten ver al
paciente completo en todos los barridos.
La disposición curvilínea de detectores se traduce en una longitud constante de la
trayectoria del conjunto fuente-detector, lo que ofrece ventajas a la hora de reconstruir las
imágenes. Esta característica de la matriz de detectores de tercera generación permite además
obtener una mejor colimación del haz de Rx, con la reducción de la radiación dispersa.
Una de las principales desventajas de los escáneres de tercera generación es la
aparición ocasional de artefactos, debida a un fallo de algún un detector
Esta es la generación de tomógrafos computados más utilizada en la actualidad.
Este sistema ofrece dos ventajas importantes: Primero, el tiempo de exploración se
reduce considerablemente, llegando a sólo 2 o 3 segundos. Y segundo, se aprovecha en forma
eficiente la radiación del tubo.

6 Fundamentos físicos y equipos
✓ CUARTA GENERACIÓN O ESCÁNERES DE CUARTA GENERACIÓN (ROTACIÓN-
ESTACIONARIA)
Jay Stein de AS&E propusieron la geometría de la cuarta generación consistiendo en un
arreglo de detectores estacionarios y un tubo de Rx que rotaba a través de un círculo dentro
de este arreglo.
Los escáneres de cuarta generación poseen sólo movimiento rotatorio. El tubo de Rx
gira, pero la matriz de detectores no. La detección de la radiación se realiza mediante una
disposición circular fija de detectores. El haz de rayos X tiene forma de abanico, con
características similares a las de los haces usados en equipos de tercera generación. Estas
unidades alcanzan tiempos de barrido de 1 segundo y pueden cubrir grosores de corte
variables, así como suministrar las mismas posibilidades de manipulación de la imagen que los
modelos de generaciones anteriores.
La matriz de detectores fijos de los escáneres de cuarta generación no produce una
trayectoria de haz constante desde la fuente a todos los detectores, sino permite calibrar cada
detector y normalizar su señal durante cada barrido.
El principal inconveniente de los escáneres de cuarta generación es la alta dosis que
recibe el paciente, bastante superior a la que se asocia a los otros tipos de escáneres.
En la cuarta generación de tomógrafos se distinguen dos modelos:
Rotación/Estacionario y Rotación/Nutación.
7 Fundamentos físicos y equipos
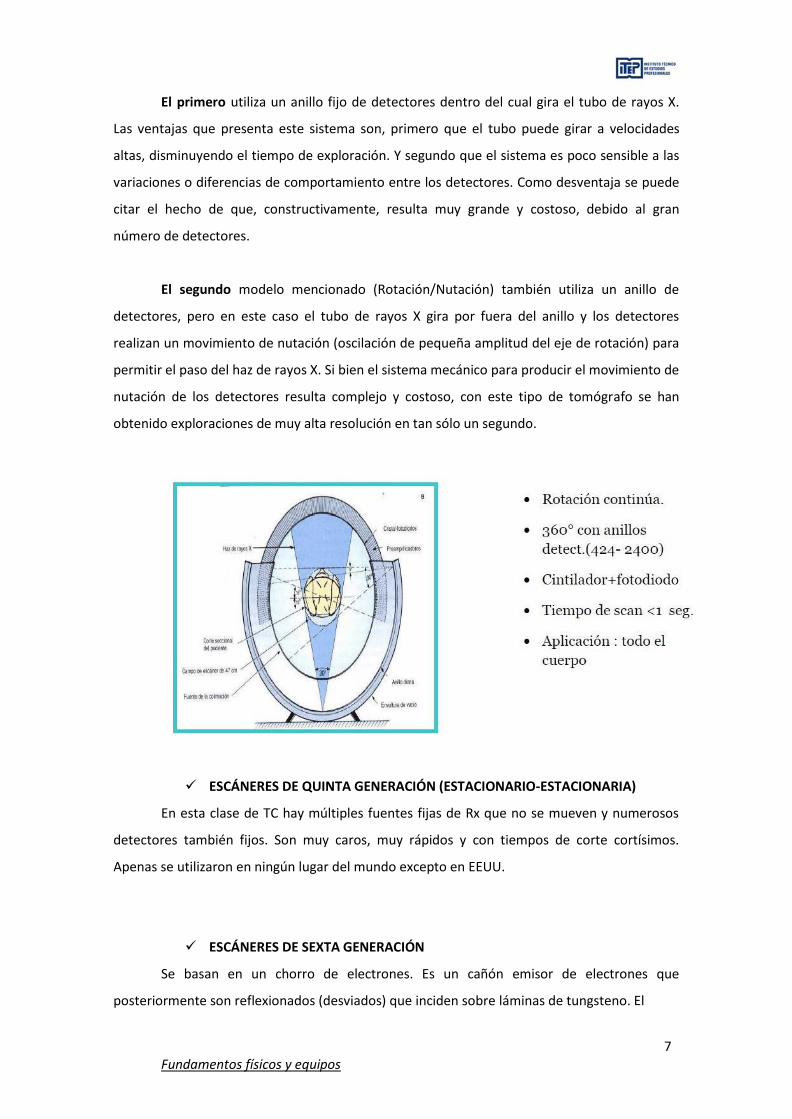
El primero utiliza un anillo fijo de detectores dentro del cual gira el tubo de rayos X.
Las ventajas que presenta este sistema son, primero que el tubo puede girar a velocidades
altas, disminuyendo el tiempo de exploración. Y segundo que el sistema es poco sensible a las
variaciones o diferencias de comportamiento entre los detectores. Como desventaja se puede
citar el hecho de que, constructivamente, resulta muy grande y costoso, debido al gran
número de detectores.
El segundo modelo mencionado (Rotación/Nutación) también utiliza un anillo de
detectores, pero en este caso el tubo de rayos X gira por fuera del anillo y los detectores
realizan un movimiento de nutación (oscilación de pequeña amplitud del eje de rotación) para
permitir el paso del haz de rayos X. Si bien el sistema mecánico para producir el movimiento de
nutación de los detectores resulta complejo y costoso, con este tipo de tomógrafo se han
obtenido exploraciones de muy alta resolución en tan sólo un segundo.
✓ ESCÁNERES DE QUINTA GENERACIÓN (ESTACIONARIO-ESTACIONARIA)
En esta clase de TC hay múltiples fuentes fijas de Rx que no se mueven y numerosos
detectores también fijos. Son muy caros, muy rápidos y con tiempos de corte cortísimos.
Apenas se utilizaron en ningún lugar del mundo excepto en EEUU.
✓ ESCÁNERES DE SEXTA GENERACIÓN
Se basan en un chorro de electrones. Es un cañón emisor de electrones que
posteriormente son reflexionados (desviados) que inciden sobre láminas de tungsteno. El
8 Fundamentos físicos y equipos
detector está situado en el lado opuesto del Gantry por donde entran los fotones. Consigue 8
cortes contiguos en 224 mseg. Apenas se utilizaron en ningún lugar el mundo excepto en
EEUU, eran carísimos y enormes, poco útiles.
Hoy en día ya se habla de generaciones de tomógrafos multicorte.
1.3 Elementos del TAC
Consta de los siguientes elementos:
1. Gantry. En su interior contiene un tubo de rayos X, la matriz de detectores. Contiene
otros elementos como el generador de alta tensión o todos los dispositivos necesarios para el
giro del sistema tubo-detectores etc.
- Tubo de rayos x. Se trata de un tubo de rayos X como los descritos en los
temas anteriores. Se utilizan tubos de rotatorios para facilitar la disipación
del calor y son tubos que proporcionan foco fino.
- Matriz de detectores. Los primeros escáneres de TC tenían un solo
detector. Los más modernos utilizan numerosos detectores, en
disposiciones que llegan hasta contener 2.400 elementos de dos
categorías: detectores de centelleo y detectores de gas.
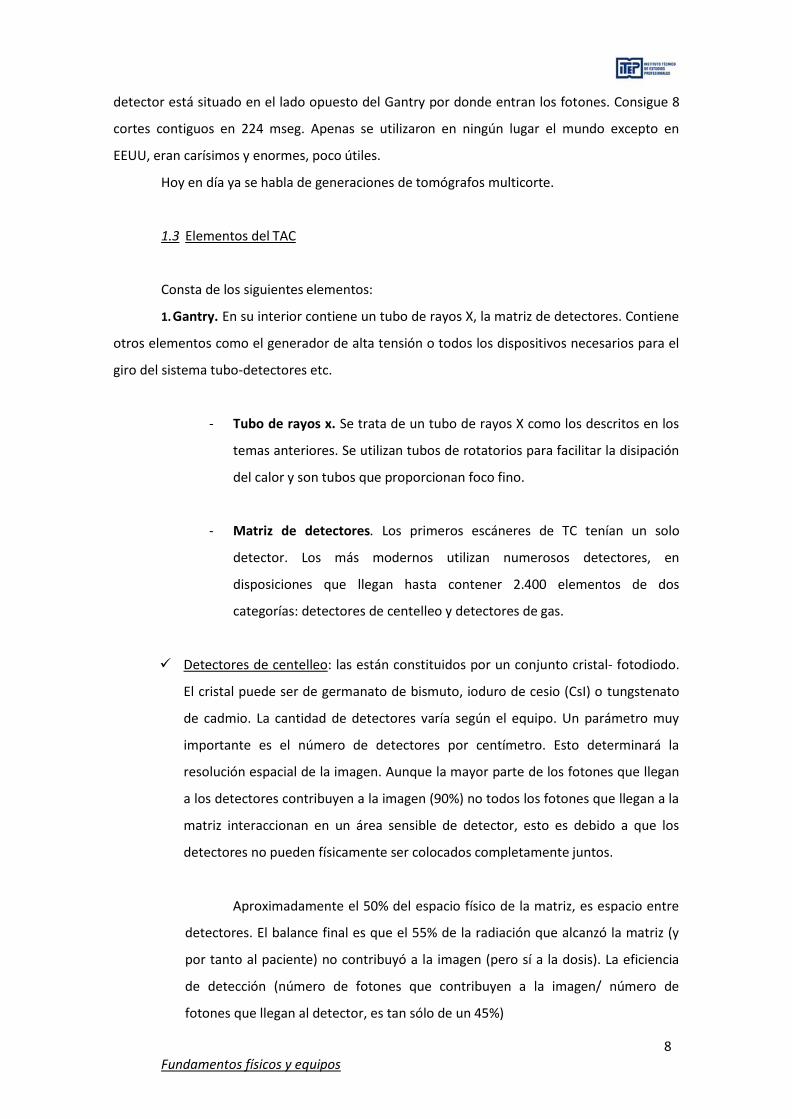
✓ Detectores de centelleo: las están constituidos por un conjunto cristal- fotodiodo.
El cristal puede ser de germanato de bismuto, ioduro de cesio (CsI) o tungstenato
de cadmio. La cantidad de detectores varía según el equipo. Un parámetro muy
importante es el número de detectores por centímetro. Esto determinará la
resolución espacial de la imagen. Aunque la mayor parte de los fotones que llegan
a los detectores contribuyen a la imagen (90%) no todos los fotones que llegan a la
matriz interaccionan en un área sensible de detector, esto es debido a que los
detectores no pueden físicamente ser colocados completamente juntos.
Aproximadamente el 50% del espacio físico de la matriz, es espacio entre
detectores. El balance final es que el 55% de la radiación que alcanzó la matriz (y
por tanto al paciente) no contribuyó a la imagen (pero sí a la dosis). La eficiencia
de detección (número de fotones que contribuyen a la imagen/ número de
fotones que llegan al detector, es tan sólo de un 45%)

9 Fundamentos físicos y equipos
✓ Detectores de gas: consisten en una gran cámara metálica de gas con separadores
espaciados a intervalos regulares de aproximadamente 1 mm (los detectores
tienen una anchura de 1mm) que dividen la cámara total en un gran número de
cámaras pequeñas y cada una de ellas funciona como un detector. El conjunto se
sella herméticamente y se llena con un gas inerte (Xe y/o Kr). La ionización de cada
cámara es proporcional a la cantidad de radiación incidente. La eficacia intrínseca
de estos detectores es del 45% (es decir, el número total de fotones que son
detectados / número de fotones que llegan al detector), pero la distancia entre las
cámaras puede reducirse hasta que se alcance la misma eficiencia total que en el
caso de los de centelleo (45%).
- Generador de alta tensión. El gantry contiene el generador de alta tensión que
es necesario aplicar no sólo al tubo, sino a los detectores. Recordemos que las
cámaras de ionización trabajan con alta tensión y que los detectores de centelleo
trabajan con tubos fotomultiplicadores que requieren de voltajes aplicados en
sus dínodos.
- Colimadores: Existen dos tipos de colimadores. El colimador prepaciente y el
colimador pos-paciente.
Los colimadores prepaciente se encuentran en el tubo, son colimadores que se
encuentran a distintas distancias del foco produciendo un haz con poca divergencia, es
decir, los fotones viajan de forma casi paralela. Este colimador va a marcar la anchura de
corte del haz y determinará la anchura del haz que incide sobre el paciente
contribuyendo a la dosis.
Los colimadores pos-paciente se encuentran sobre los detectores. Su función es
reducir la apertura para evitar que lleguen a los detectores fotones dispersos que
contribuyan a una degradación de la imagen

10 Fundamentos físicos y equipos
2. Camilla. Sostiene al paciente en una posición cómoda, está construida con un
material de bajo número atómico, como fibra de carbono. La camilla ha de desplazarse con
suavidad sin movimientos bruscos y con una velocidad constante
3. Ordenador. La tomografía computarizada no sería posible si no se dispusiera de un
ordenador digital ultrarrápido. Se requiere resolver simultáneamente del orden de 30.000
ecuaciones; por tanto, es preciso disponer de un ordenador de gran capacidad. Con todos
estos cálculos el ordenador reconstruye la imagen.
La mayoría de los ordenadores requieren un entorno especial y controlado; en
consecuencia, muchas instalaciones de TC deben disponer de una sala contigua dedicada al
equipo informático. En la sala del ordenador se han de mantener condiciones de humedad y
temperatura.
4. Consola de control. Numerosos escáneres de TC disponen de dos consolas, una para
el técnico que dirige el funcionamiento del equipo y la otra para el radiólogo que consulta las
imágenes y manipula su contraste, tamaño y condiciones generales de presentación visual. La
consola del operador contiene dispositivos de medida y control para facilitar la selección de los
factores técnicos radiográficos adecuados, el movimiento mecánico del gantry y la camilla del
paciente y los mandatos comunicados al ordenador para activar la reconstrucción y
transferencia de la imagen. La consola de visualización del médico acepta la imagen
reconstruida desde la consola del operador y la visualiza con vistas a obtener el diagnóstico
adecuado.

11 Fundamentos físicos y equipos
5. Almacenamiento de las imágenes. Existen numerosos formatos de imágenes útiles
en el campo de la radiología. Los escáneres actuales almacenan los datos de las imágenes en
discos duros del ordenador.
1.4 TAC helicoidal y secuencial
Hablaremos de TAC helicoidal o de TAC secuencial en función del modo en el que el
TAC realiza la adquisición de la información con respecto al movimiento de la camilla durante
el tiempo de disparo. En el secuencial la camilla está quieta mientras el tubo realiza una
rotación completa mientras que en el helicoidal el tubo gira mientras la camilla se desplaza.
Este hecho supone grandes diferencias en la reconstrucción de la imagen

12 Fundamentos físicos y equipos
Las hasta finales de los años 80 del siglo pasado la adquisición sobre la zona anatómica
que se iba a estudiar se realizaba de manera secuenciales decir: una rotación del tubo de rayos
X era seguida de un movimiento longitudinal en la mesa.
Las adquisiciones de información en una rotación completa correspondían a
información procedente de un mismo corte. El proceso secuencial resultaba lento porque
después de cada rotación de 360°, los cables que conecta los componentes en rotación (tubo
de rayos X y detectores) con la electrónica del gantry debían rebobinarse. De este modo entre
corte y corte había un tiempo empleado en rebobinar el cableado para poder proceder a una
nueva rotación.
El barrido tomográfico de un corte junto con la parada y el rebobinado de los
componentes implica del orden de 10 segundos, de los cuales sólo de 1 a 2 se emplean en la
adquisición del de datos.
Uno de los problemas que tiene el tac secuencial es el hecho de que las imágenes de
los diferentes cortes se hacen individualmente, por tanto, las regiones que caen en las zonas
entre dos cortes son zonas de las que la reconstrucción del objeto tiene peor calidad.
✓ Rotación continua: slip rings
Suprimir el retraso entre corte y corte requiere una tecnología non stop, es decir, la
rotación continua del tubo y de los detectores. Esto se consigue mediante un diseño
consistente en unos anillos por los que se deslizan el tubo y los detectores. A través de estos
anillos se transmite la tensión al tubo y a los detectores sin conexiones fijadas, de modo similar
a la conexión empleada por los coches de choque. Esto supone un avance y una disminución
de los tiempos de adquisición puesto que se elimina el tiempo necesario para el rebobinado
13 Fundamentos físicos y equipos
del cableado, sin embargo, la técnica sigue sin estar optimizada, puesto que sigue
necesitándose un tiempo para el desplazamiento de la camilla entre corte y corte
Es importante que tengamos en cuenta que la rotación continua mediante la técnica
de slip rings no se trata de un tipo concreto de TAC, de lo que estamos hablando es de una
mejora en la tecnología que permitió eliminar el cableado que hacía girar los dispositivos. Este
sistema puede ser utilizado tanto en técnica secuencial como en técnica helicoidal.
La solución idónea pasa porque el tubo gire de forma continua simultáneamente al
movimiento de la camilla de forma que se eliminan las tanto los tiempos necesarios para el
rebobinado (con la técnica slip rings) así como el tiempo necesario para el desplazamiento de
la camilla entre corte y corte.
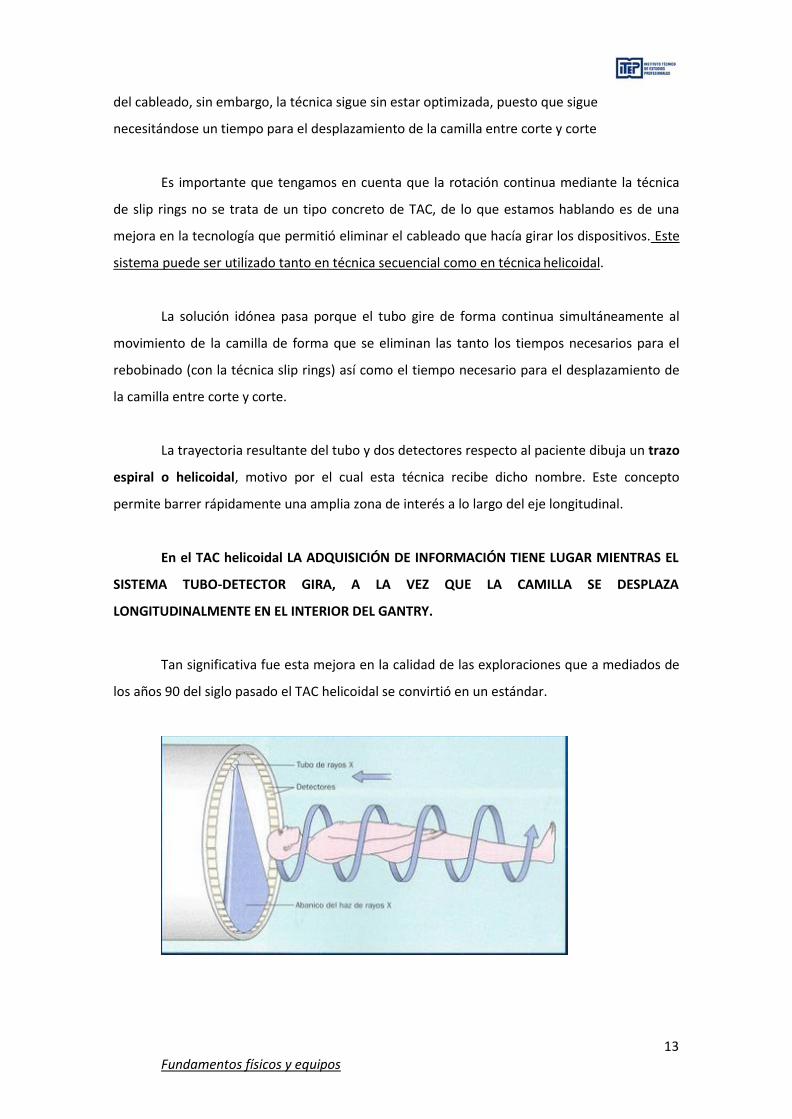
La trayectoria resultante del tubo y dos detectores respecto al paciente dibuja un trazo
espiral o helicoidal, motivo por el cual esta técnica recibe dicho nombre. Este concepto
permite barrer rápidamente una amplia zona de interés a lo largo del eje longitudinal.
En el TAC helicoidal LA ADQUISICIÓN DE INFORMACIÓN TIENE LUGAR MIENTRAS EL
SISTEMA TUBO-DETECTOR GIRA, A LA VEZ QUE LA CAMILLA SE DESPLAZA
LONGITUDINALMENTE EN EL INTERIOR DEL GANTRY.
Tan significativa fue esta mejora en la calidad de las exploraciones que a mediados de
los años 90 del siglo pasado el TAC helicoidal se convirtió en un estándar.
14 Fundamentos físicos y equipos
1.5 Pitch
Un concepto importante en el tac helicoidal es la velocidad con la que la mesa se
desplaza a través del gantry en relación con el tiempo de rotación del tubo y el grosor de corte.
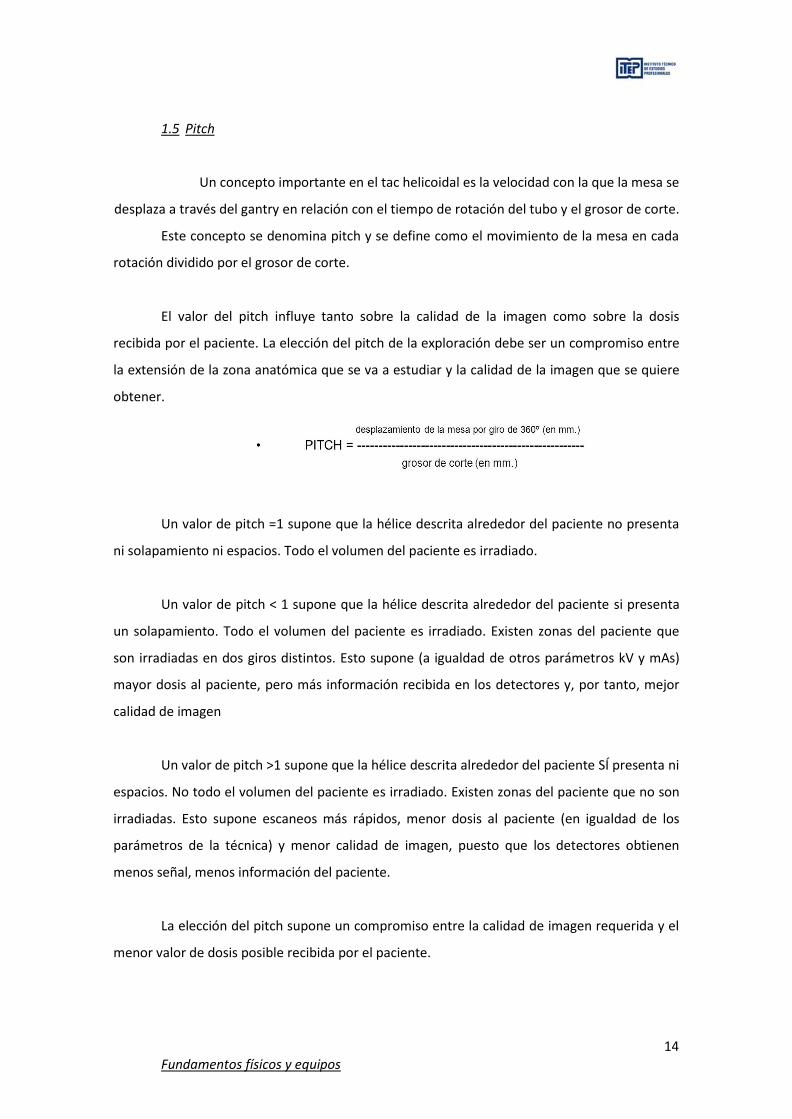
Este concepto se denomina pitch y se define como el movimiento de la mesa en cada
rotación dividido por el grosor de corte.
El valor del pitch influye tanto sobre la calidad de la imagen como sobre la dosis
recibida por el paciente. La elección del pitch de la exploración debe ser un compromiso entre
la extensión de la zona anatómica que se va a estudiar y la calidad de la imagen que se quiere
obtener.
Un valor de pitch =1 supone que la hélice descrita alrededor del paciente no presenta
ni solapamiento ni espacios. Todo el volumen del paciente es irradiado.
Un valor de pitch < 1 supone que la hélice descrita alrededor del paciente si presenta
un solapamiento. Todo el volumen del paciente es irradiado. Existen zonas del paciente que
son irradiadas en dos giros distintos. Esto supone (a igualdad de otros parámetros kV y mAs)
mayor dosis al paciente, pero más información recibida en los detectores y, por tanto, mejor
calidad de imagen
Un valor de pitch >1 supone que la hélice descrita alrededor del paciente SÍ presenta ni
espacios. No todo el volumen del paciente es irradiado. Existen zonas del paciente que no son
irradiadas. Esto supone escaneos más rápidos, menor dosis al paciente (en igualdad de los
parámetros de la técnica) y menor calidad de imagen, puesto que los detectores obtienen
menos señal, menos información del paciente.
La elección del pitch supone un compromiso entre la calidad de imagen requerida y el
menor valor de dosis posible recibida por el paciente.
15 Fundamentos físicos y equipos
1.6 TAC multicorte
Se denominan TACMC a aquellos cuyos sistemas de detectores son matrices con varias
filas o hileras de detectores, de manera, que es posible la realización de varios cortes
simultáneamente.
El proceso tiene lugar de forma que, el haz que irradia al paciente en cada giro, es
recibido en una matriz de detectores, donde cada una de las filas contribuye a la generación de
un corte.
Estas matrices pueden ser de configuración fija o de configuración adaptable. En la
configuración fija los detectores tienen todo el mismo tamaño en la dirección axial, mientras
que en la configuración adaptable, los detectores de las distintas hileras tienen tamaños
distintos. El número de cortes que se realizan en cada rotación completa viene marcado por el
número de canales que disponga el TAC
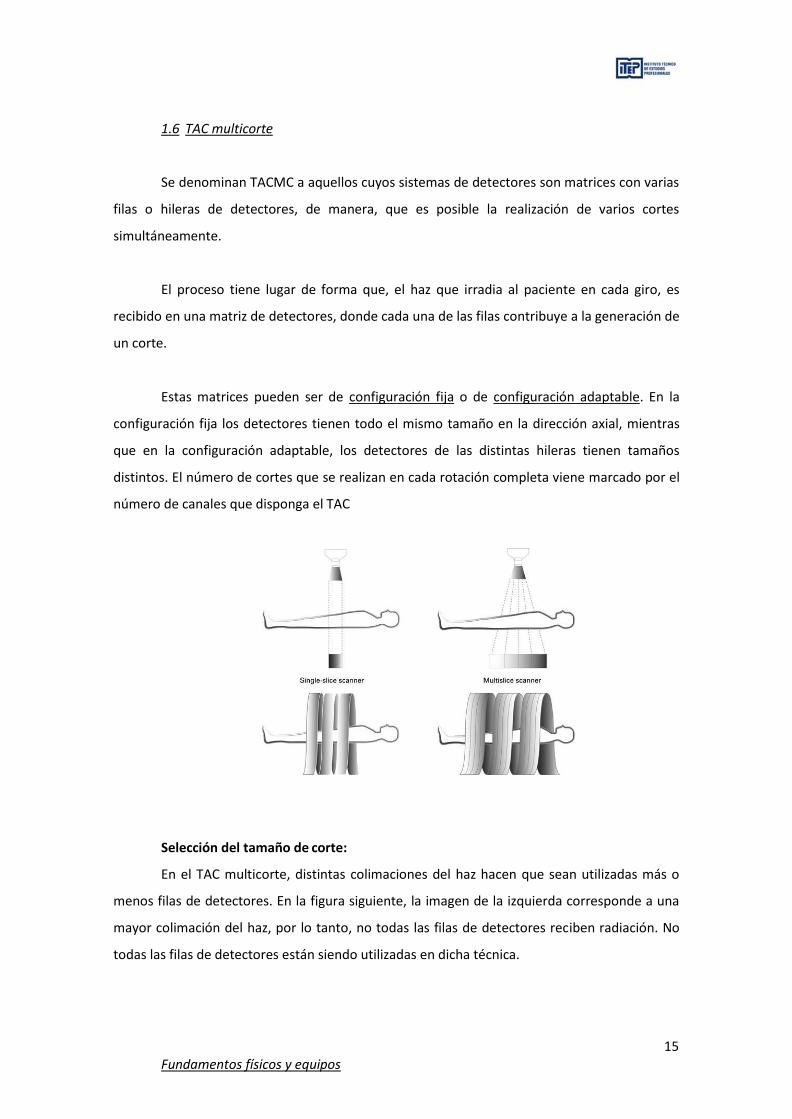
Selección del tamaño de corte:
En el TAC multicorte, distintas colimaciones del haz hacen que sean utilizadas más o
menos filas de detectores. En la figura siguiente, la imagen de la izquierda corresponde a una
mayor colimación del haz, por lo tanto, no todas las filas de detectores reciben radiación. No
todas las filas de detectores están siendo utilizadas en dicha técnica.

16 Fundamentos físicos y equipos
Por otro lado, dada una colimación, es posible seleccionar el número de cortes
realizados, veamos:
Supongamos que disponemos de un TAC con 10 filas de detectores de 0,5 mm (cada
fila tendrá un número enorme de detectores) elegida una colimación determinada, es posible
elegir la realización de 4 cortes de 0,5 mm o bien, 2 cortes de 1mm.
La elección de una u otra se debe a que puede hacerse que los detectores trabajen
como uno sólo, de forma que pueden ser reagrupados.
POR TANTO, LA COLIMACIÓN DETERMINA EL NÚMERO DE FILAS QUE VAN A
UTILIZARSE, Y DENTRO DE HABER ELEGIDO UNA U OTRA COLIMACIÓN SE DISPONE DE VARIAS
CONFIGURACIONES DE ANCHO DE CORTE Y NÚMERO DE CORTES REALIZADOS EN CADA GIRO

17 Fundamentos físicos y equipos
vez.
Por lo tanto, en un TAC multicorte es posible seleccionar el ancho de corte.
En un TAC multicorte, bien sea secuencial o helicoidal, se realizan varios cortes a la
La colimación del haz de radiación va a determinar el ancho total de detectores al que
le va a llegar radiación, por lo tanto, marcha el ancho máximo que podría tener un corte.
Una colimación grande del haz, es decir, haz muy estrecho, supone que en cada corte
irradiamos una porción estrecha del paciente. Una colimación pequeña, supone que el haz es
ancho, es decir, podemos hacer más cortes en un único giro, ¡pero ojo! eso tiene un
inconveniente: a los detectores les llega radiación dispersa que empeora la imagen. Por tanto,
ha de llegarse a un equilibrio entre la calidad de la imagen y la rapidez con la que queremos
realizar el escaneo.

18 Fundamentos físicos y equipos
La flecha roja representa un fotón disperso que contribuirá en la imagen a un corte
que no le corresponde. Ese fotón contribuye al emborronamiento de la imagen.
Colimaciones menores suponen mayores tiempos de escaneo, pero disminuyen mucho
la contribución de la radiación dispersa a la formación dela imagen.
1.7 Formación de la imagen
Los detectores de la matriz obtienen la información de los diferentes cortes. Los
distintos detectores obtienen información a partir de la radiación que les llega. Como el equipo
conoce las características del haz emitido por el tubo. El equipo sabe, por tanto, lo que emite y
lo que le llega, de forma que puede saber cómo ha sido la radiación atenuada.
Los detectores obtienen por tanto información de cómo ha sido atenuado el haz por
los distintos materiales.
El hecho de que el sistema tubo-detectores gire alrededor del paciente y que existan
multitud de detectores en la matriz, hace que el sistema consiga información de cómo atenúan
la radiación unidades pequeñas del objeto. Estas unidades pequeñas se denominan VÓXELES,
y son las UNIDADES TRIDIMENSIONALES DE FORMA TETRAÉDRICA EN LA QUE EL OBJETO
QUEDA DIVIDIDO
En la siguiente imagen se observa una sección del objeto. Al realizar la adquisición, el
TAC obtiene información del COEFICIENTE DE ATENUACIÓN DE CADA VOXEL.
19 Fundamentos físicos y equipos
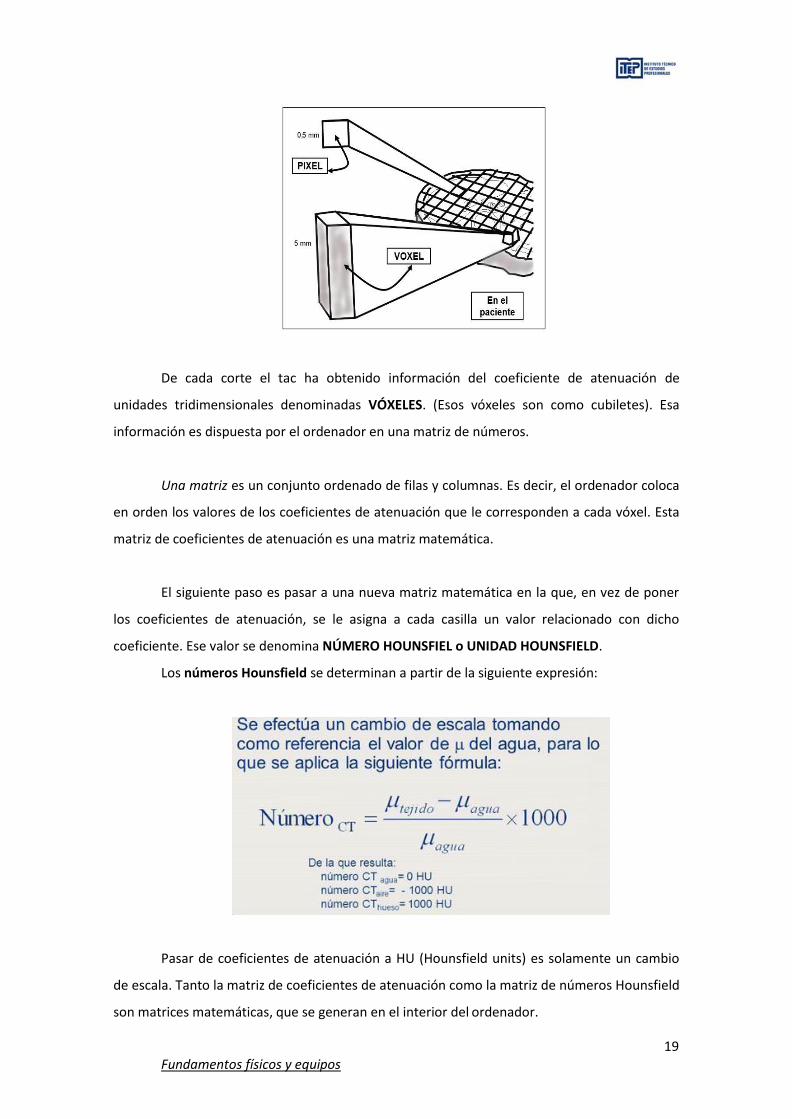
De cada corte el tac ha obtenido información del coeficiente de atenuación de
unidades tridimensionales denominadas VÓXELES. (Esos vóxeles son como cubiletes). Esa
información es dispuesta por el ordenador en una matriz de números.
Una matriz es un conjunto ordenado de filas y columnas. Es decir, el ordenador coloca
en orden los valores de los coeficientes de atenuación que le corresponden a cada vóxel. Esta
matriz de coeficientes de atenuación es una matriz matemática.
El siguiente paso es pasar a una nueva matriz matemática en la que, en vez de poner
los coeficientes de atenuación, se le asigna a cada casilla un valor relacionado con dicho
coeficiente. Ese valor se denomina NÚMERO HOUNSFIEL o UNIDAD HOUNSFIELD.
Los números Hounsfield se determinan a partir de la siguiente expresión:
Pasar de coeficientes de atenuación a HU (Hounsfield units) es solamente un cambio
de escala. Tanto la matriz de coeficientes de atenuación como la matriz de números Hounsfield
son matrices matemáticas, que se generan en el interior del ordenador.

20 Fundamentos físicos y equipos
Ejemplo de cálculo de HU:
✓ ¿Qué HU le corresponde al agua? El tejido en este caso es agua, por lo tanto donde
pone coeficiente de atenuación del tejido, he de poner el coeficiente de
atenuación del agua, sustituyendo, obtenemos 0 en el numerador. 0 entre Coef de
atenuación del agua = 0. 0 por 1000 cero. Por tanto, HU del agua = 0.
✓ ¿Qué HU le corresponde al aire? El tejido en este caso es aire, por lo tanto, donde
pone coeficiente de atenuación del tejido, he de poner el coeficiente de
atenuación del aire, sustituyendo, vemos que en el numerador obtenemos
prácticamente - µagua, puesto queµaire es despreciable frente al µagua. En el
numerador obtenemos por tanto - µagua ., que al ser dividido entre -µagua da -1. Esto
multiplicado por 1000 da -1000. Por tanto, HU del aire = -1000.
Por lo tanto, el TAC, de cada corte del objeto (en este caso paciente, ha obtenido una
matriz de números Hounsfield, donde cada número Hounsfield corresponde al material
correspondiente.
El siguiente paso es trasladar esta información a una matriz bidimensional en el
monitor. Esa matriz estará formada unidades denominadas PÍXELES. Cada pixel es un
“cuadradito” al que le será asignado un TONO DE GRIS.
Por tanto,Objeto objeto dividido en vóxeles. De cada vóxel el TAC obtiene
su µ el ordenador del TAC ordena los valores de µ en una matriz. A partir de esta matriz,
genera otra con valores de HU.

21 Fundamentos físicos y equipos
En el monitor donde se visualizará la imagen, la pantalla queda dividida en PÍXELES
(cuadrados bidimensionales). El pixel es la unidad bidimensional de la imagen. Este pixel
tendrá asignado un tono de gris comprendido entre negro y blanco en función de su número
Hounsfield
De cada vóxel el TAC obtiene su coeficiente de atenuación, esto se traduce
finalmente en una matriz de números Hounsfield. El ordenador le asignará un tono de gris a
cada HU.
22 Fundamentos físicos y equipos
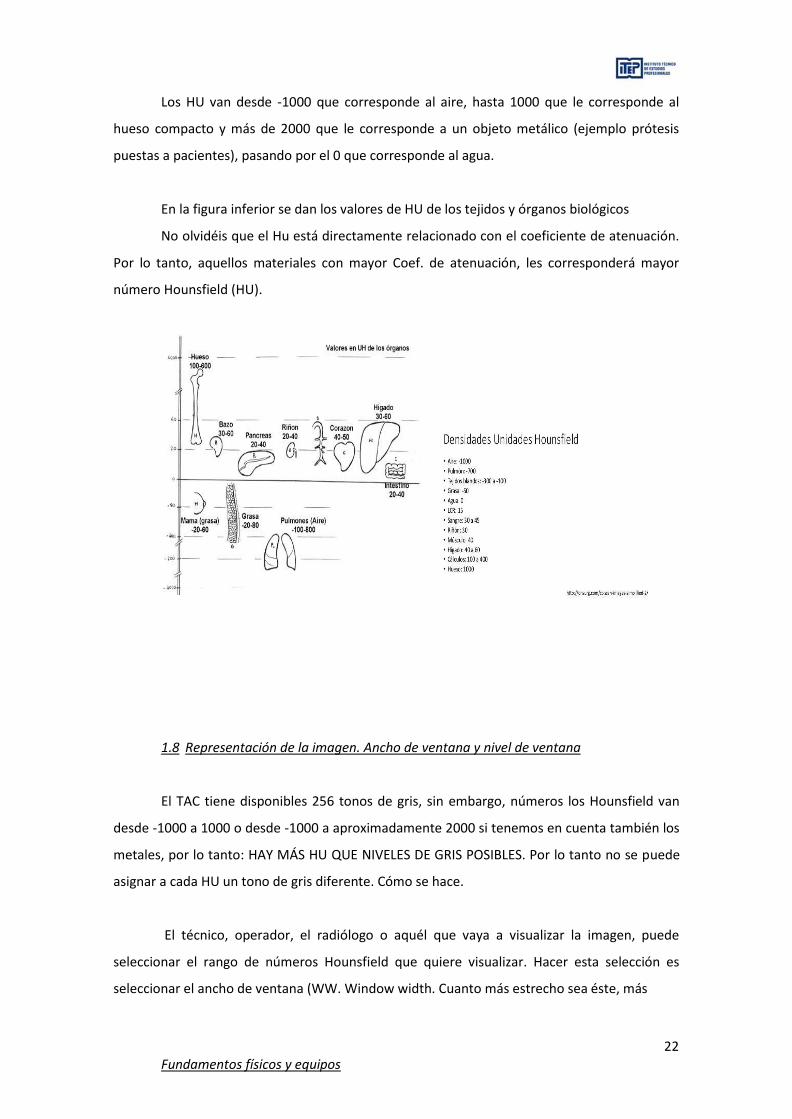
Los HU van desde -1000 que corresponde al aire, hasta 1000 que le corresponde al
hueso compacto y más de 2000 que le corresponde a un objeto metálico (ejemplo prótesis
puestas a pacientes), pasando por el 0 que corresponde al agua.
En la figura inferior se dan los valores de HU de los tejidos y órganos biológicos
No olvidéis que el Hu está directamente relacionado con el coeficiente de atenuación.
Por lo tanto, aquellos materiales con mayor Coef. de atenuación, les corresponderá mayor
número Hounsfield (HU).
1.8 Representación de la imagen. Ancho de ventana y nivel de ventana
El TAC tiene disponibles 256 tonos de gris, sin embargo, números los Hounsfield van
desde -1000 a 1000 o desde -1000 a aproximadamente 2000 si tenemos en cuenta también los
metales, por lo tanto: HAY MÁS HU QUE NIVELES DE GRIS POSIBLES. Por lo tanto no se puede
asignar a cada HU un tono de gris diferente. Cómo se hace.
El técnico, operador, el radiólogo o aquél que vaya a visualizar la imagen, puede
seleccionar el rango de números Hounsfield que quiere visualizar. Hacer esta selección es
seleccionar el ancho de ventana (WW. Window width. Cuanto más estrecho sea éste, más

23 Fundamentos físicos y equipos
contraste observará entre las estructuras visualizadas. Otro parámetro importante es el nivel
de ventana (WL: Window Level), que se define como el número Hounsfield correspondiente al
valor central de la ventana.
Por tanto, la imagen queda determinada por los números Hounsfield, el color asignado
depende de los valores de WW y WL. (al igual que la imagen que hacemos con una cámara
digital, es la que es, independientemente de que después le apliquemos filtros. Los diferentes
filtros aplicados a la imagen nos permiten VISUALIZARLA de diferentes modos, pero la imagen
queda determinada por el valor de los coeficientes de atenuación de los diferentes vóxeles
1.9 Representación tridimensional (3D)
El estudio de la representación tridimensional (3D) en medicina se ha expandido
considerablemente en los últimos años. En el campo de la clínica la visualización en 3D puede
ser de mucha utilidad en planeaciones de cirugía, ortopedia, traumas músculo-esqueléticos,
estudios en hígado, análisis de tejidos reconstrucción de vasos sanguíneos, trombosis venosa,

24 Fundamentos físicos y equipos
isquemias y visualización neuronal entre otros, partiendo de estudios de imagenología tales
como ultrasonido, tomografía axial computarizada, resonancia magnética nuclear, medicina
nuclear, de los cuales se extrae información anatómica o funcional del órgano en estudio. Las
posibilidades de despliegue que presentan actualmente la mayoría de las estaciones de trabajo
han permitido obtener resultados espectaculares en el dominio de la representación 3D. Sin
embargo, en la mayoría de los sistemas existentes actualmente, se ha dado énfasis a la etapa
de despliegue, en detrimento de la calidad de la representación; esta situación se agrava
considerando el caso específico de la aplicación a las imágenes médicas, puesto que el médico
se basa en el resultado en 3D para emitir un diagnóstico. Se pueden definir las diversas etapas
que intervienen en la reconstrucción tridimensional de un corte tomográfico, desde su
obtención en el equipo correspondiente hasta su despliegue en un ordenador.
1. ADQUISICION. Normalmente, se obtiene la imagen en dos dimensiones
directamente del equipo cuya modalidad nos interesa utilizar (TAC, RMN, US,
SPECT, etc).
2. REGISTRO (Image Registration). Esta etapa consiste en ubicar en un mismo plano
de referencia una serie de imágenes que contienen al órgano de interés. Al
considerar imágenes multimodales, el problema radica en que cada una de éstas
tiene un plano de referencia propio, por lo que es indispensable en estos casos, la
alineación de las imágenes.
3. SEGMENTACION. La segmentación consiste en extraer objetos de interés a partir
de las imágenes en tonos de gris. La segmentación proporciona información
superficial al generar una imagen binaria de la estructura de interés o proporciona
una imagen con información hacia adentro del volumen. Este tema ha sido
ampliamente investigado, pero no se ha llegado a obtener un método universal
que clasifique automáticamente (aproximadamente) cualquier estructura
anatómica de interés, a partir de cualquier modalidad de imagen, de ahí que se
continúe esta investigación según la aplicación.
4. INTERPOLACION. Los contornos obtenidos en la etapa precedente deben ser
alineados en pila y en caso de que la resolución sea insuficiente, se requiere aplicar
un algoritmo de interpolación entre datos para todas las dimensiones deseadas.
Dentro de los métodos de interpolación existen aquellos que resaltan
25 Fundamentos físicos y equipos
características de calidad o de tiempo de ejecución. Es necesario realizar un
estudio para determinar el mejor método de interpolación que se adapte a la
aplicación que en particular se desee desarrollar. En nuestra área de investigación,
se tiene experiencia en la evaluación de diversos métodos de interpolación
aplicados en diferentes áreas, tales como electroencefalografía, radioterapia,
modelos de curvas y superficies, etc.
5. PRESENTACION DE RESULTADOS EN 3D. La etapa final de la reconstrucción es
quizás la más espectacular. Consiste en desplegar el volumen del órgano en
estudio o de una de sus estructuras en la pantalla del ordenador.
Los dos grandes campos en la representación tridimensional de imágenes médicas son
la representación en superficie (surface rendering) y la representación en volumen (volume
rendering).
En representación en superficie, la visualización y manejo de datos multidimensionales
se basa únicamente en los límites del objeto y el despliegue de la superficie del objeto de
interés está aislado del resto del volumen.
En representación en volumen, se persigue la representación de múltiples estructuras
conque el valor de cada uno está correlacionado con el tipo de material que lo integra. Para
cada versión de despliegue se examina cada vóxel, lo que hace a esta representación muy
costosa computacionalmente. El tema de las ventajas y desventajas de uno u otro tipo de
representación se ha convertido en controversia, pero se puede hacer una diferencia drástica
entre los dos: la representación en volumen es muy útil cuando las estructuras en la escena
son difusas, como puede ser un cáncer dentro de un tejido; por otro lado la representación en
superficie pierde la información del material del objeto que lo limita para fines de comparación
con otros tejidos. La gran ventaja de tener únicamente información sobre los límites del objeto
es que permite una más rápida interacción y manipulación de los datos, además de obtener
una aproximación mejor al detalle y textura de la superficie del objeto.
Para realizar la representación en 3D, se efectúan las transformaciones de movimiento
requeridas, la eliminación de áreas ocultas, la asignación de sombreado o transparencia y la
proyección desde el ángulo deseado. Actualmente existen paquetes comerciales para
cualquier estación de trabajo que realizan funciones de despliegue de estructuras en 3D de
una manera automática, principalmente para aplicaciones de imágenes sintéticas. Sin

26 Fundamentos físicos y equipos
embargo, no cualquier método de sombreado entrega un resultado acorde con lo que se vería
en la realidad. Nuevamente, es necesaria una evaluación de los métodos empleados en esta
etapa, de acuerdo a criterios cualitativos y cuantitativos del especialista.
6. FUSION DE DATOS. El resultado de una reconstrucción tridimensional debe
además ser integrado en el conjunto de imágenes necesario para el diagnóstico;
una etapa adicional en el proceso de análisis es la posibilidad de fusionar
información complementaria extraída de diversas fuentes, sin pérdida de las
características útiles de cada modalidad. Para realizar el proceso de fusión más
adecuado a cada aplicación, se han propuesto diversos métodos, de los cuales el
de más impacto ha sido la transformación por "wavelets", aunque no se ha llegado
a la etapa de validación clínica.
2 ARTEFACTOS EN TC (anexo tema 6, RM)
Debido a que los artefactos que se producen en el tomógrafo son los “mismos2 que en
resonancia; se procederá a su descripción en el tema 6.
Igualmente, se adjunta un artículo detallado de cada artefacto.
3 BIBLIOGRAFIA
http://diposit.ub.edu/dspace/bitstream/2445/5627/1/RX_ones_castellano.pdf
Libro Aran
Página Web Aranformación
http://www.sc.ehu.es/sbweb/ocw-fisica/