tecnicas de muestreo y reconstruccion - … de clase (ppt...sistemas de control muestreados k xk()t...
TRANSCRIPT
TECNICAS DE MUESTREO Y RECONSTRUCCION
Tema 2
Indice
Sistemas de Control MuestreadosMuestreoTransformada EstrelladaReconstrucción Conversion D/AConversion A/D
Sistemas de Control Muestreados
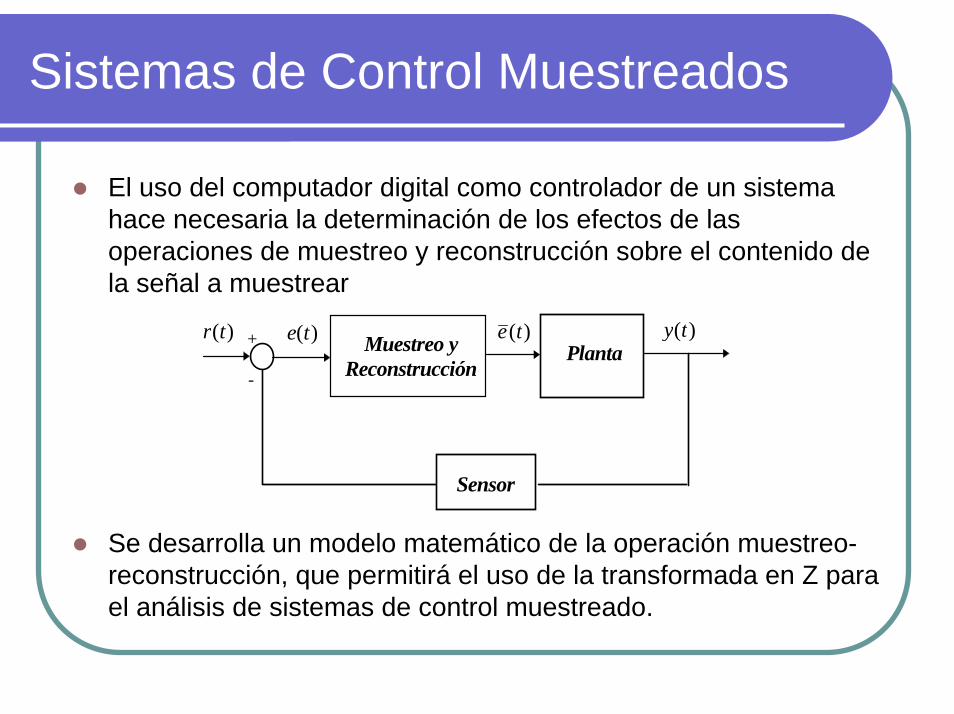
El uso del computador digital como controlador de un sistema hace necesaria la determinación de los efectos de las operaciones de muestreo y reconstrucción sobre el contenido de la señal a muestrear
Se desarrolla un modelo matemático de la operación muestreo-reconstrucción, que permitirá el uso de la transformada en Z para el análisis de sistemas de control muestreado.
Muestreo yReconstrucción
Planta
Sensor
y t( )e t( )r t( ) +
-
e t( )
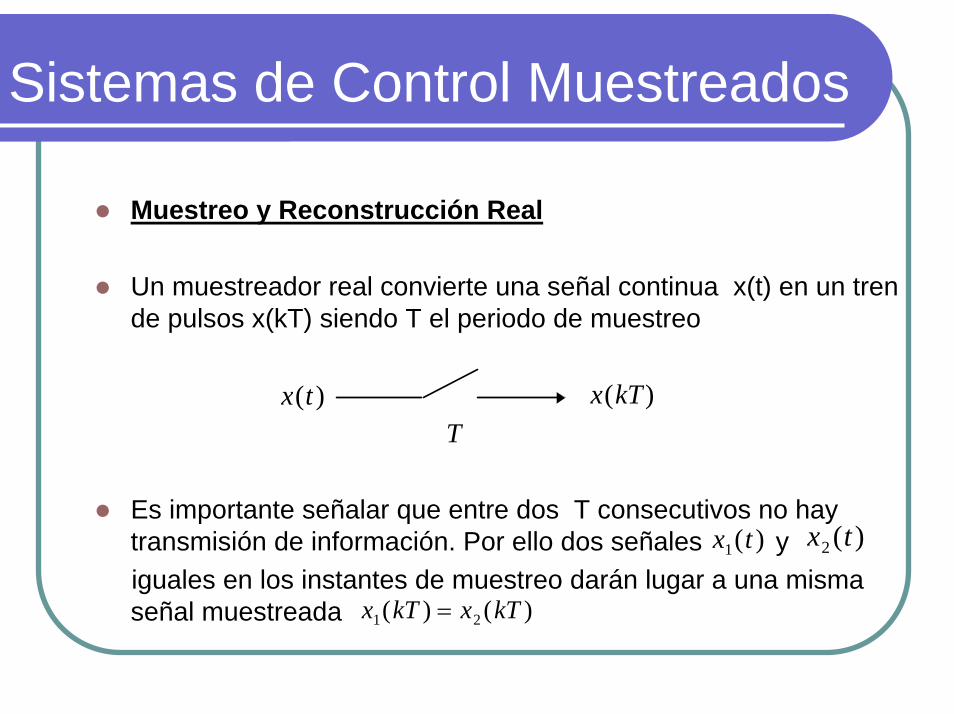
Muestreo y Reconstrucción Real
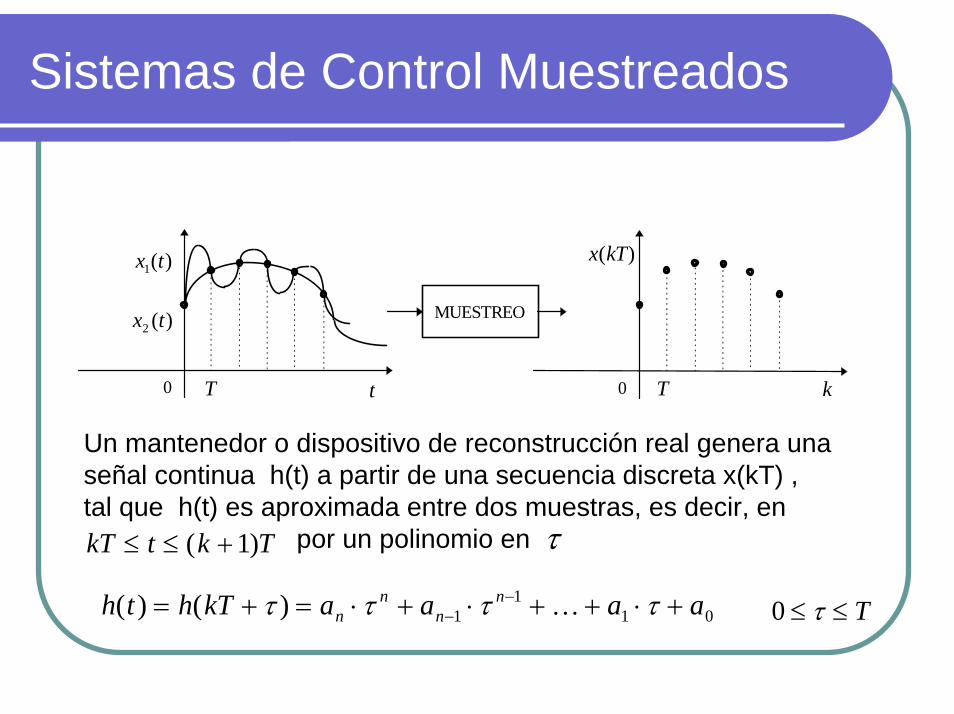
Un muestreador real convierte una señal continua x(t) en un tren de pulsos x(kT) siendo T el periodo de muestreo
Es importante señalar que entre dos T consecutivos no hay transmisión de información. Por ello dos señales y iguales en los instantes de muestreo darán lugar a una misma señal muestreada
Sistemas de Control Muestreados
x t( ) x kT( )T
x t1( ) x t2 ( )
x kT x kT1 2( ) ( )=
Sistemas de Control Muestreados
k
x kT( )
0t
x t1( )
0
MUESTREO
TT
x t2 ( )
Un mantenedor o dispositivo de reconstrucción real genera una señal continua h(t) a partir de una secuencia discreta x(kT) , tal que h(t) es aproximada entre dos muestras, es decir, en
por un polinomio en kT t k T≤ ≤ +( )1 τ
h t h kT a a a ann
nn( ) ( )= + = ⋅ + ⋅ + + ⋅ +−−τ τ τ τ11
1 0K 0 ≤ ≤τ T
Sistemas de Control Muestreados
Para n= 0, se tiene el mantenedor de orden 0, que utiliza un solo valor de x(kT), y para , mantenedor de orden n, que utiliza n+1 valores de x(kT) para generar , concretamente
A medida que aumenta n, mejora la precisión en la aproximación. No obstante, este mantenedor produce grandes desfases entre x(kT) y h(t) que hacen inestable el sistema de control en bucle cerrado.
El mantenedor más utilizado es el H0 (Hold 0), definido por
n ≠ 0h kT( )+ τ
x k n T x k n T x k T x kT(( ) ), (( ) ), , (( ) ), ( )− − + −1 1K
h kT x kT( ) ( )+ =τ 0 ≤ ≤τ T
Sistemas de Control Muestreados
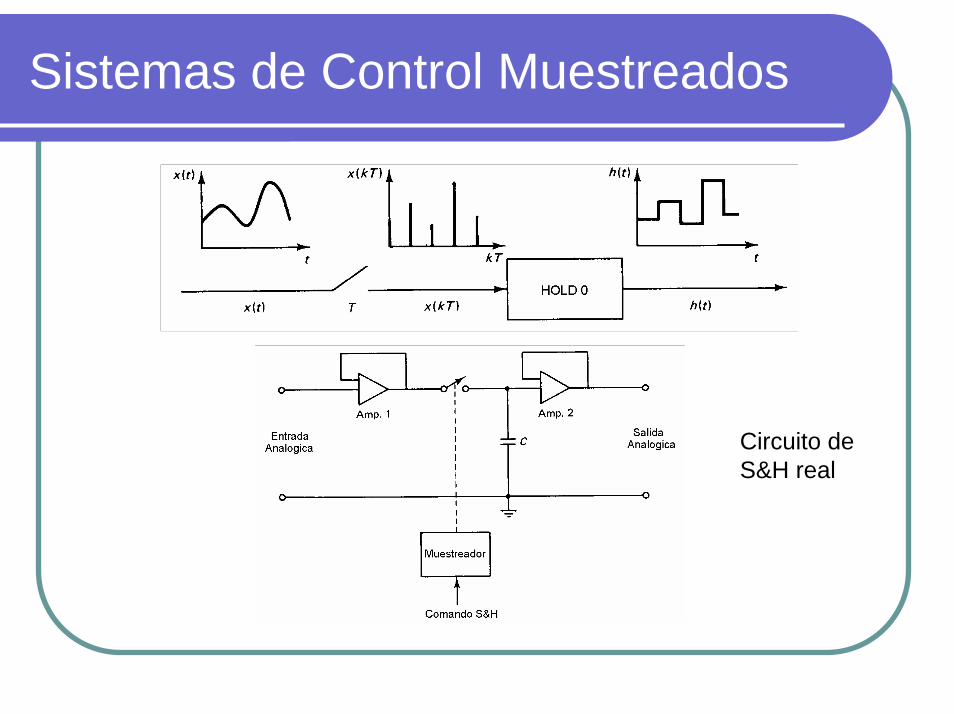
Circuito de S&H real
Sistemas de Control Muestreados
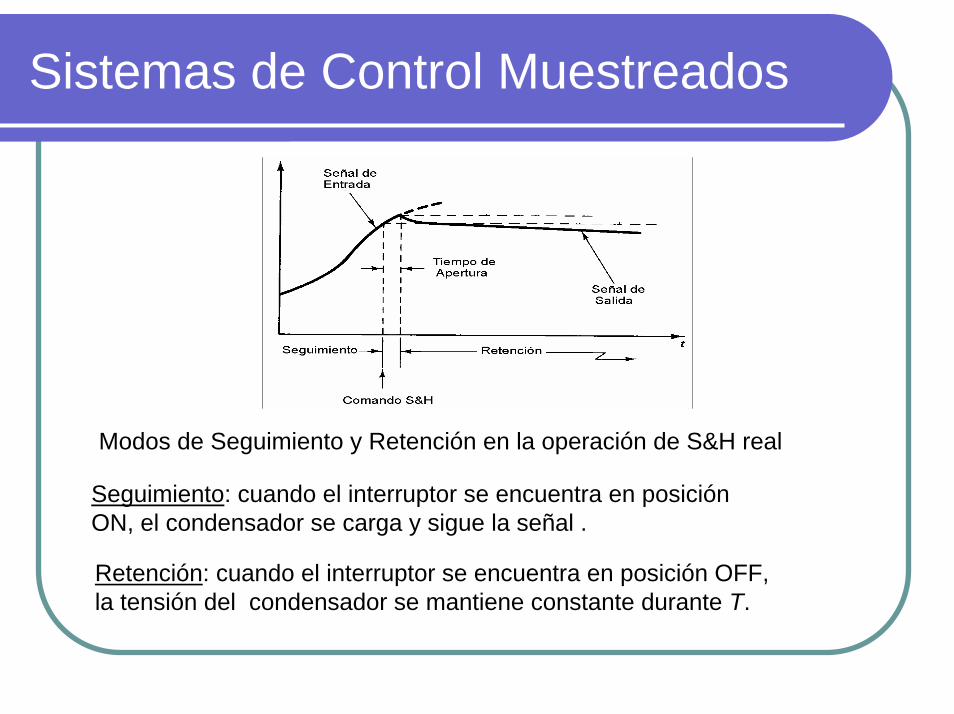
Modos de Seguimiento y Retención en la operación de S&H real
Seguimiento: cuando el interruptor se encuentra en posición ON, el condensador se carga y sigue la señal .
Retención: cuando el interruptor se encuentra en posición OFF, la tensión del condensador se mantiene constante durante T.
Sistemas de Control Muestreados
Modelo Matemático de Muestreo y Reconstrucción
Considerando la operación de muestreo y reconstrucción H0 real, se puede expresar h(t) como
Aplicando la transformada de Laplace
h t h u t u t T h T u t T u t T( ) ( ) ( ( ) ( )) ( ) ( ( ) ( ))= ⋅ − − + ⋅ − − − +0 2 K
[ ]h t x kT u t kT u t k Tk
( ) ( ) ( ) ( ( ) )= ⋅ − − − +=
∞
∑ 10
H s x kTe e
s
kTs k Ts
k( ) ( )
( )
= ⋅−⎛
⎝⎜
⎞⎠⎟
− − +
=
∞
∑1
0
H s x kT ees
kTs
k
Ts
( ) ( )= ⋅⎛⎝⎜
⎞⎠⎟ ⋅
−⎛⎝⎜
⎞⎠⎟−
=
∞ −
∑0
1
Sistemas de Control Muestreados
El primer factor depende de la entrada x(t) y T, se define como la transformada estrellada de x(t), y corresponde a la operación de muestreo ideal
El segundo factor representa una función de transferencia
correspondiente a la operación de reconstrucción ideal
De esta manera, el proceso de muestreo + reconstrucción ideal forman un modelo matemático equivalente al proceso de muestreo + reconstruccion real.
X s x kT e kTs
k
∗ −
=
∞
= ⋅∑( ) ( )0
G sesH
Ts
01
( ) =− −
Sistemas de Control Muestreados
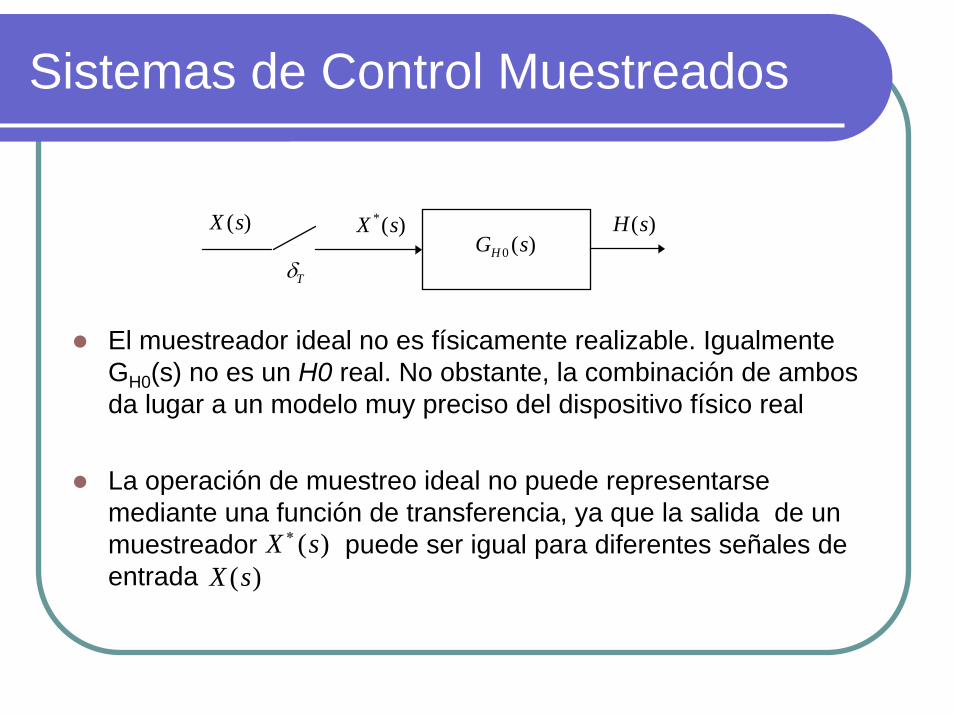
El muestreador ideal no es físicamente realizable. Igualmente GH0(s) no es un H0 real. No obstante, la combinación de ambos da lugar a un modelo muy preciso del dispositivo físico real
La operación de muestreo ideal no puede representarse mediante una función de transferencia, ya que la salida de un muestreador puede ser igual para diferentes señales de entrada
X s( ) X s*( )
δT
G sH 0 ( )H s( )
X s∗( )X s( )
Muestreo
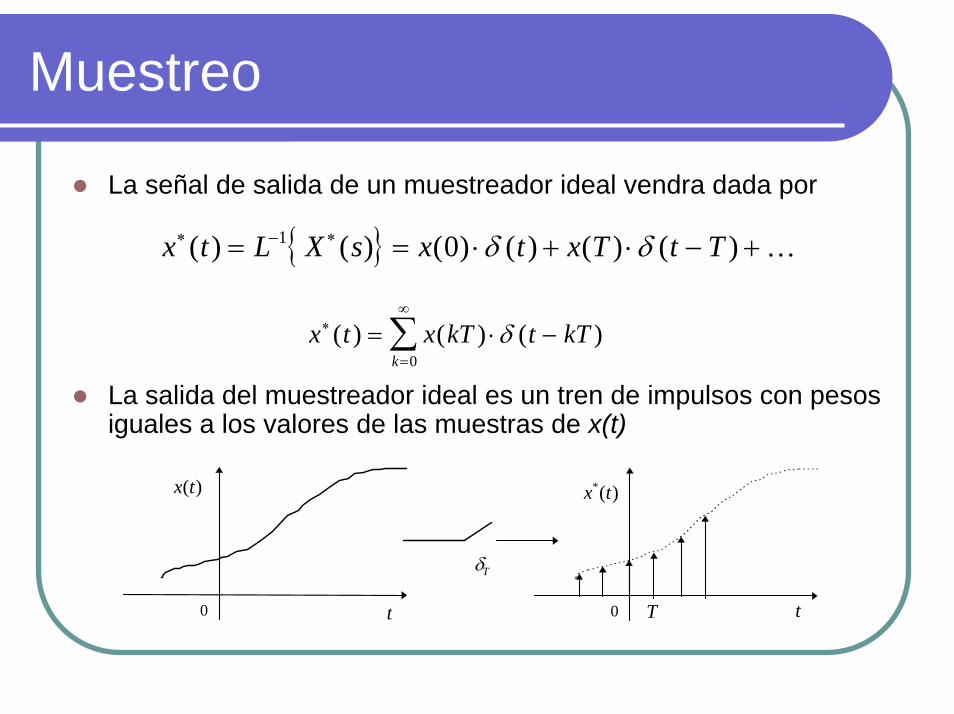
La señal de salida de un muestreador ideal vendra dada por
La salida del muestreador ideal es un tren de impulsos con pesos iguales a los valores de las muestras de x(t)
{ }x t L X s x t x T t T∗ − ∗= = ⋅ + ⋅ − +( ) ( ) ( ) ( ) ( ) ( )1 0 δ δ K
x t x kT t kTk
∗
=
∞
= ⋅ −∑( ) ( ) ( )δ0
t
x t*( )
0t
x t( )
0 T
δT
Muestreo
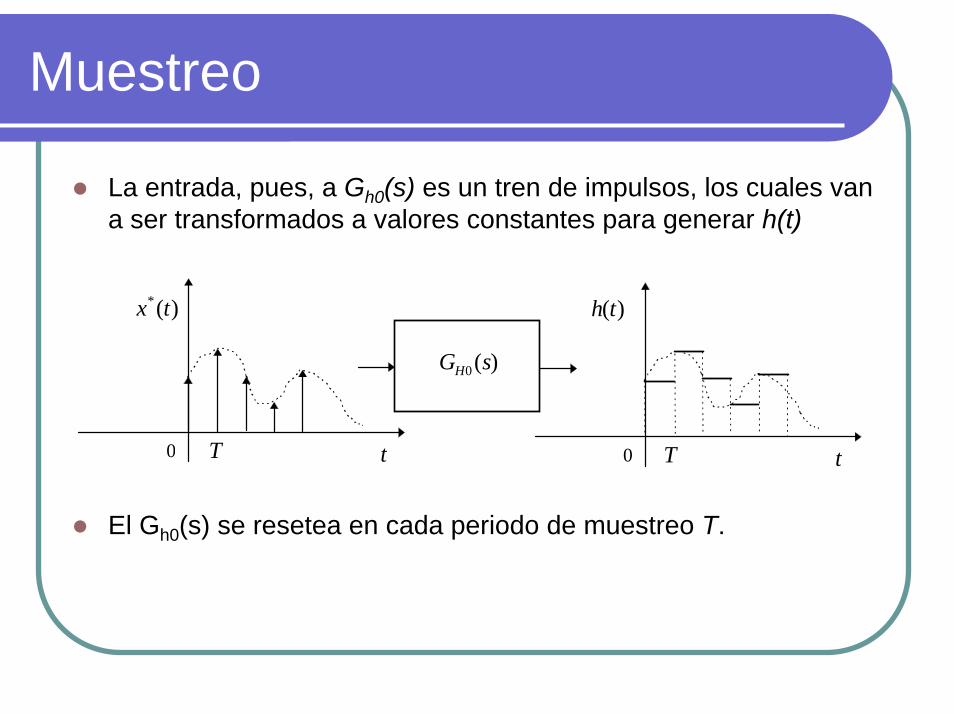
La entrada, pues, a Gh0(s) es un tren de impulsos, los cuales van a ser transformados a valores constantes para generar h(t)
El Gh0(s) se resetea en cada periodo de muestreo T.
G sH0( )
t
x t*( )
0 T t
h t( )
0 T
Transformada Estrellada
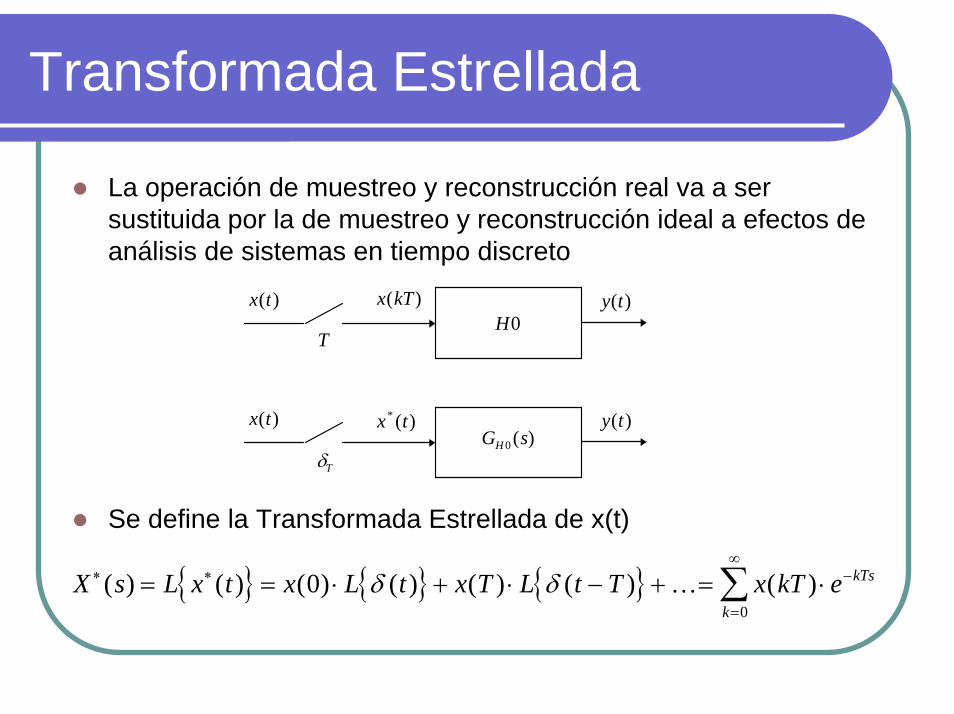
La operación de muestreo y reconstrucción real va a ser sustituida por la de muestreo y reconstrucción ideal a efectos de análisis de sistemas en tiempo discreto
Se define la Transformada Estrellada de x(t)
x t( ) x kT( )
TH0
y t( )
x t( ) x t* ( )
δT
G sH 0 ( )y t( )
{ } { } { }X s L x t x L t x T L t T x kT e kTs
k
∗ ∗ −
=
∞
= = ⋅ + ⋅ − + = ⋅∑( ) ( ) ( ) ( ) ( ) ( ) ( )00
δ δ K
Transformada Estrellada
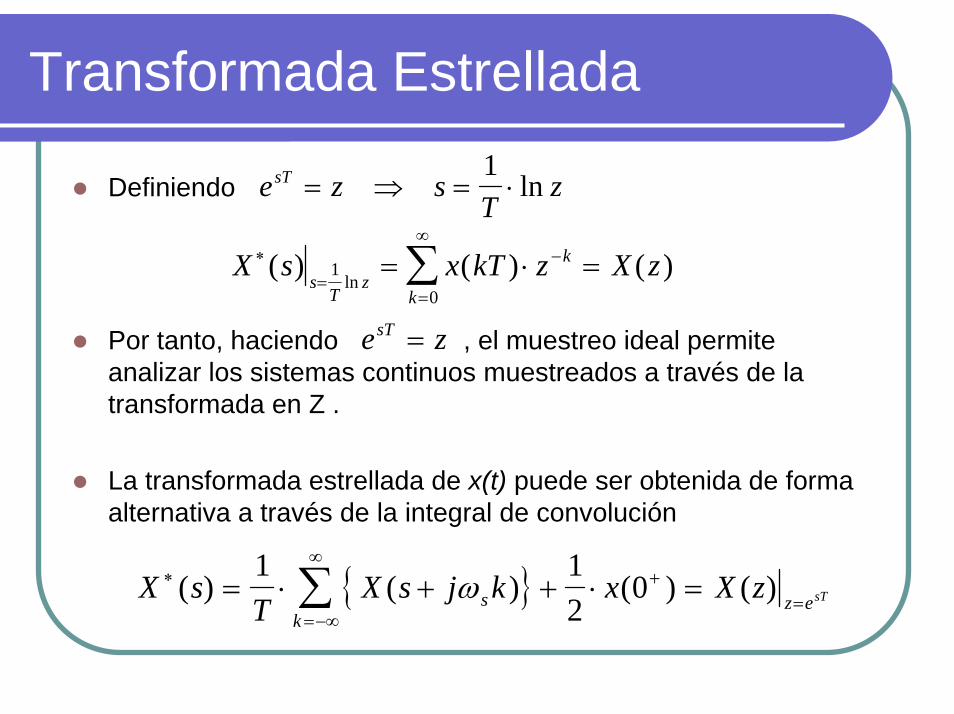
Definiendo
Por tanto, haciendo , el muestreo ideal permite analizar los sistemas continuos muestreados a través de la transformada en Z .
La transformada estrellada de x(t) puede ser obtenida de forma alternativa a través de la integral de convolución
e z sT
zsT = ⇒ = ⋅1
ln
X s x kT z X zs
Tz
k
k
∗=
−
=
∞
= ⋅ =∑( ) ( ) ( )ln
10
e zsT =
{ }X sT
X s j k x X zs z ek
sT∗ +
==−∞
∞
= ⋅ + + ⋅ =∑( ) ( ) ( ) ( )1 1
20ω
Transformada Estrellada
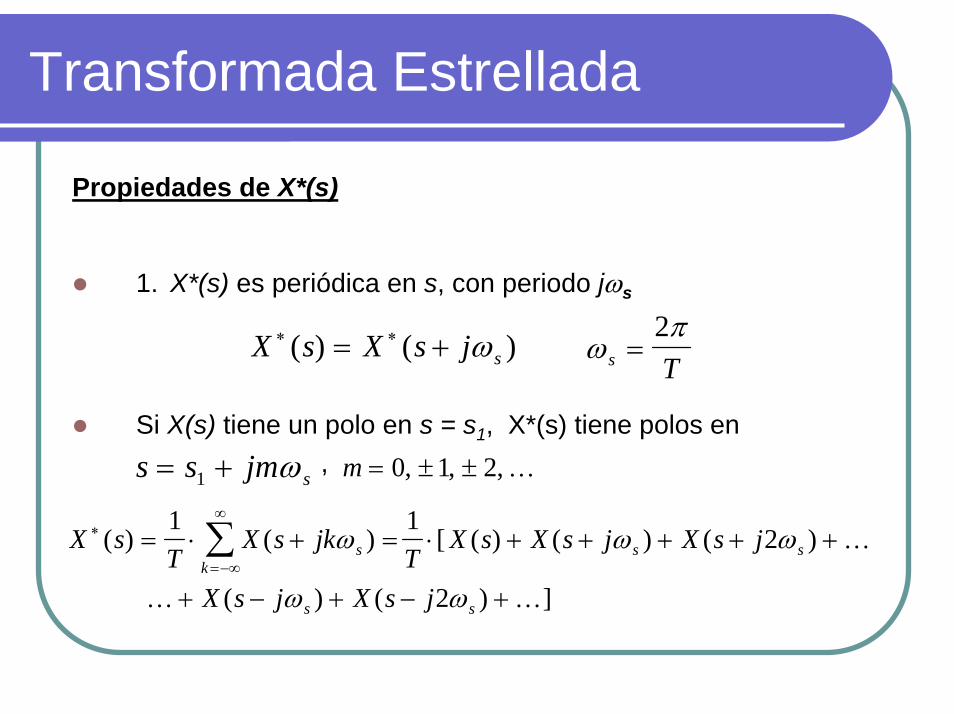
Propiedades de X*(s)
1. X*(s) es periódica en s, con periodo jωs
Si X(s) tiene un polo en s = s1, X*(s) tiene polos en ,
X s X s j s∗ ∗= +( ) ( )ω ω
πs T=
2
s s jm s= +1 ω m = ± ±0 1 2, , ,K
X sT
X s jkT
X s X s j X s j
X s j X s j
sk
s s
s s
∗
=−∞
∞
= ⋅ + = ⋅ + + + + +
+ − + − +
∑( ) ( ) [ ( ) ( ) ( )
( ) ( ) ]
1 12
2
ω ω ω
ω ω
K
K K
Transformada Estrellada
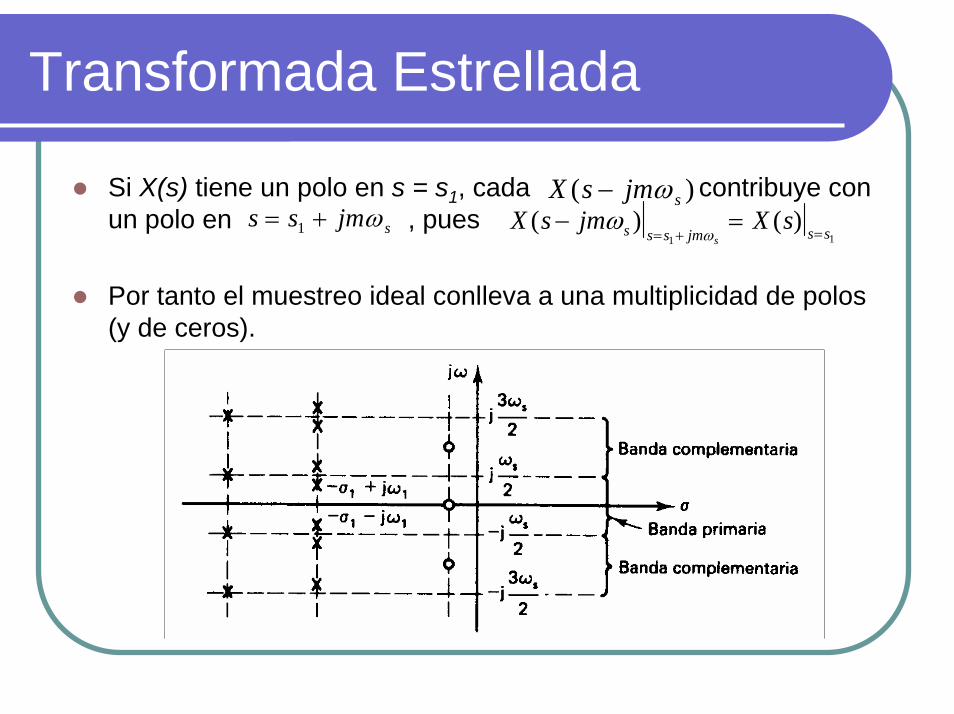
Si X(s) tiene un polo en s = s1, cada contribuye con un polo en , pues
Por tanto el muestreo ideal conlleva a una multiplicidad de polos (y de ceros).
X s jm s( )− ωs s jm s= +1 ω X s jm X ss s s jm s ss
( ) ( )− == + =
ωω1 1
Reconstrucción
La aplicación de la señal de control a la planta requiere la conversión de la señal muestreada a continua, para evitar las componentes de alta frecuencia de la señal de control.
Esta conversión se realiza mediante circuitos de reconstrucción o Hold, que se comportan como filtros paso bajo que atenúan las componentes de alta frecuencia de la señal muestreada. Se van a examinar las caracterisiticas de los circuitos Hold ideal , Hold0y Hold1.
Reconstrucción
Teorema del Muestreo
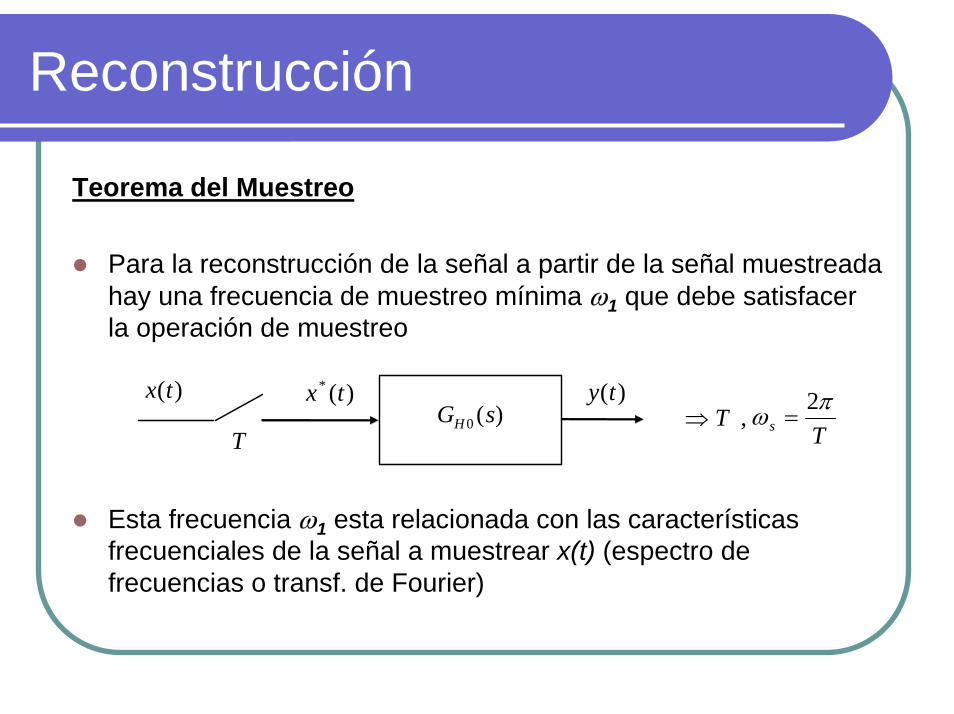
Para la reconstrucción de la señal a partir de la señal muestreada hay una frecuencia de muestreo mínima ω1 que debe satisfacer la operación de muestreo
Esta frecuencia ω1 esta relacionada con las características frecuenciales de la señal a muestrear x(t) (espectro de frecuencias o transf. de Fourier)
x t( ) x t* ( )
TG sH 0 ( )
y t( )⇒ T ,
Tsπω 2
=
Reconstrucción
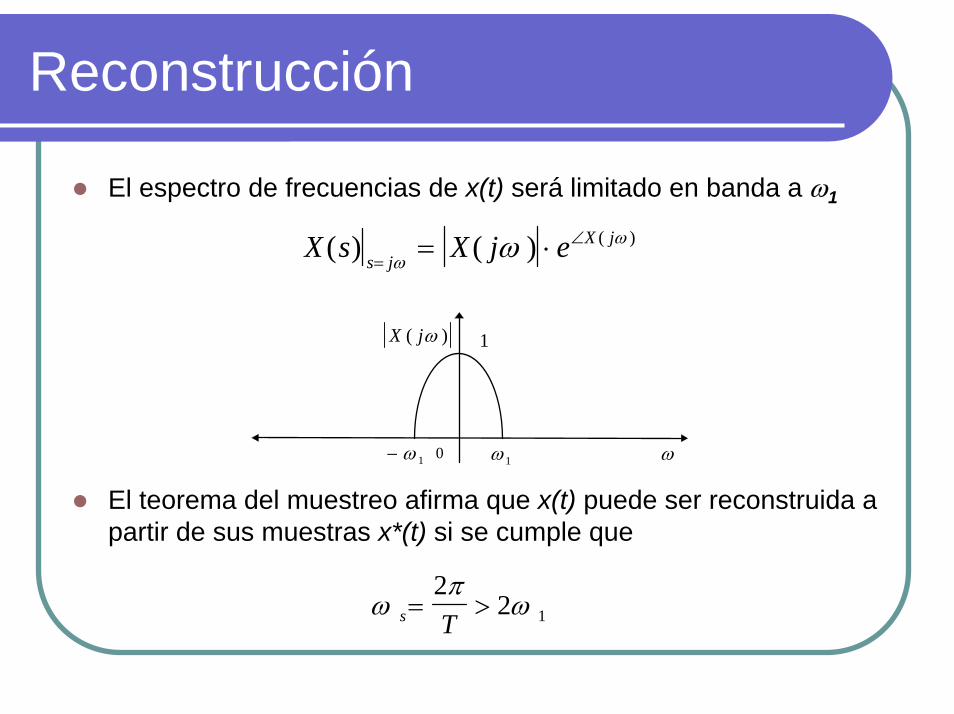
El espectro de frecuencias de x(t) será limitado en banda a ω1
El teorema del muestreo afirma que x(t) puede ser reconstruida a partir de sus muestras x*(t) si se cumple que
X s X j es jX j( ) ( ) ( )
=∠= ⋅ω
ωω
ω
X j( )ω
0 ω 1
1
− ω 1
ωπ
ωs T= >
22 1
Reconstrucción
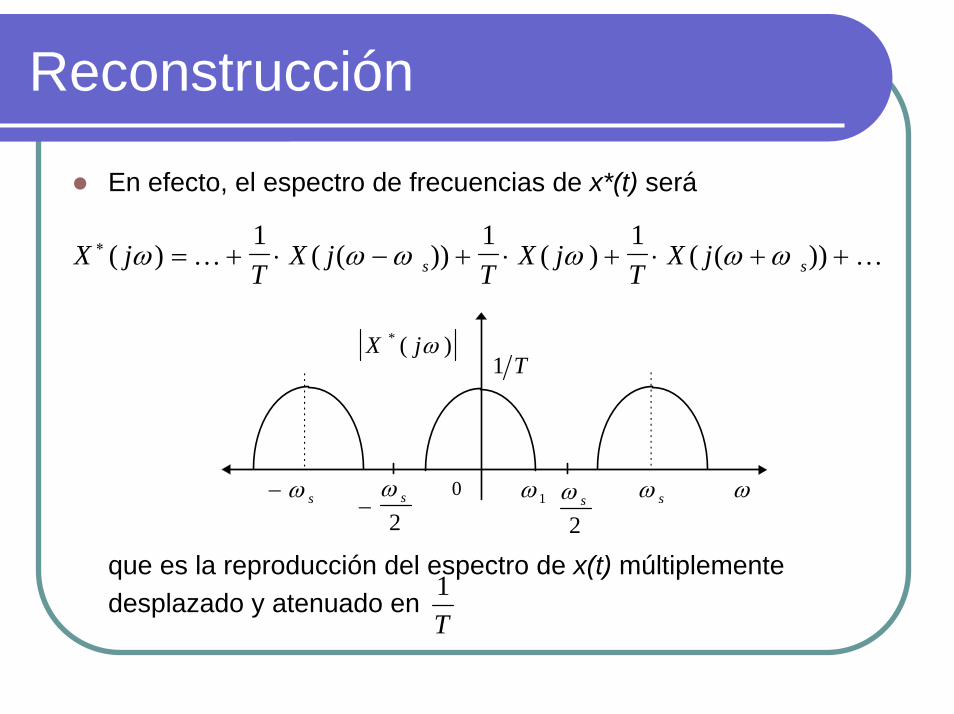
En efecto, el espectro de frecuencias de x*(t) será
que es la reproducción del espectro de x(t) múltiplemente desplazado y atenuado en
X jT
X jT
X jT
X js s∗ = + ⋅ − + ⋅ + ⋅ + +( ) ( ( )) ( ) ( ( ))ω ω ω ω ω ωK K
1 1 1
ω
X j* ( )ω
0 ω 1
1 T
ω s− ω s ω s
2−ω s
2
1T
Reconstrucción
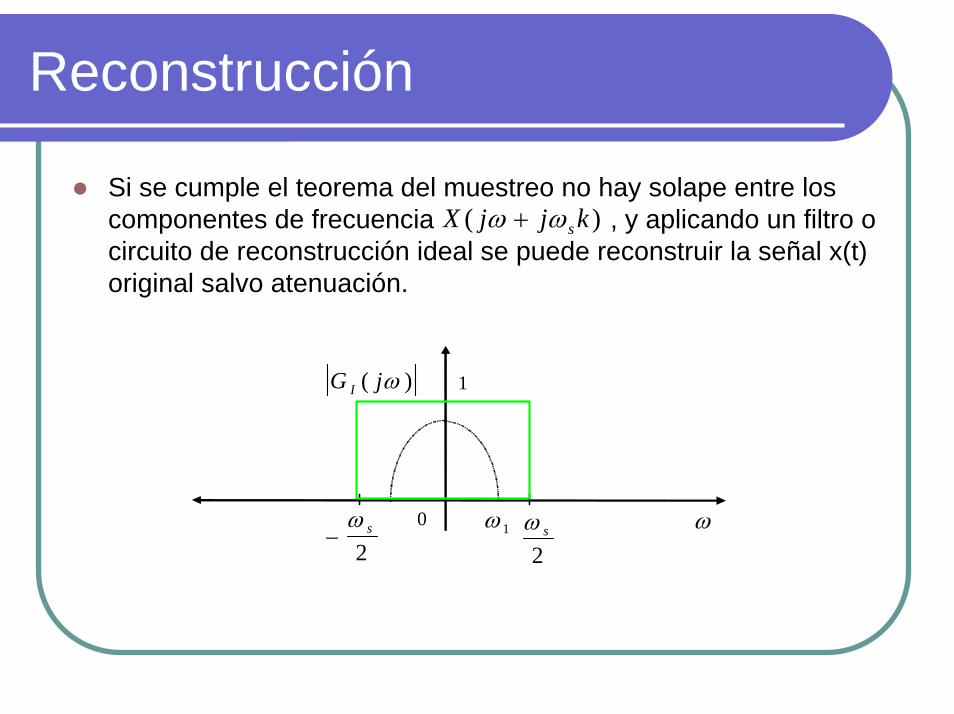
Si se cumple el teorema del muestreo no hay solape entre los componentes de frecuencia , y aplicando un filtro o circuito de reconstrucción ideal se puede reconstruir la señal x(t) original salvo atenuación.
X j j ks( )ω ω+
ω
G jI ( )ω
0 ω 1 ω s
2 −
ω s
2
1
Reconstrucción
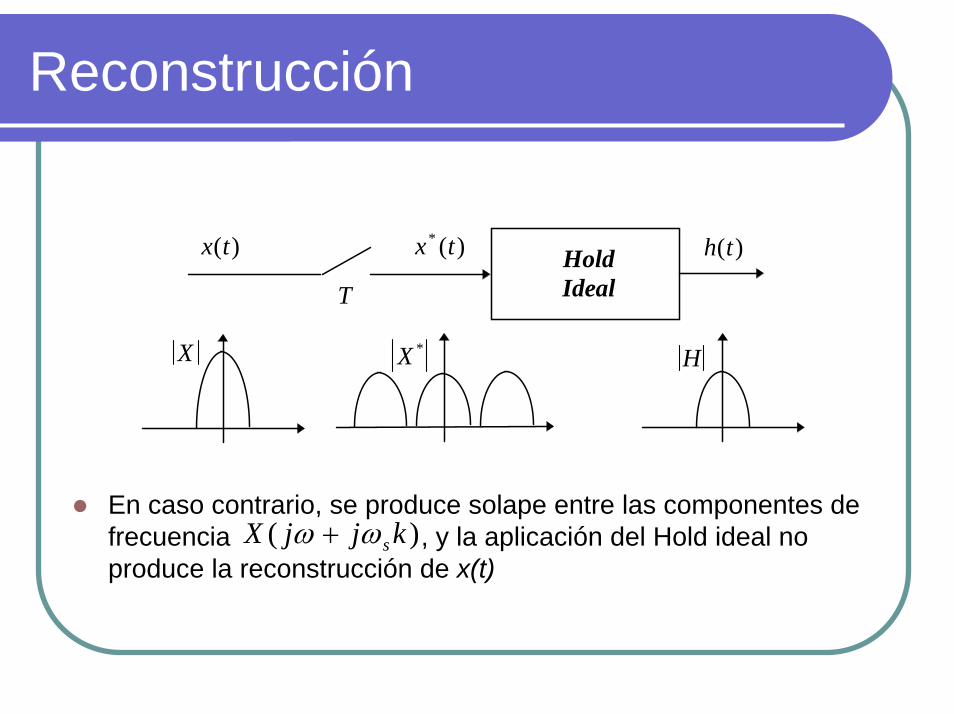
En caso contrario, se produce solape entre las componentes de frecuencia , y la aplicación del Hold ideal no produce la reconstrucción de x(t)
X j j ks( )ω ω+
x t( ) x t* ( )
THoldIdeal
h t( )
X X * H
Reconstrucción
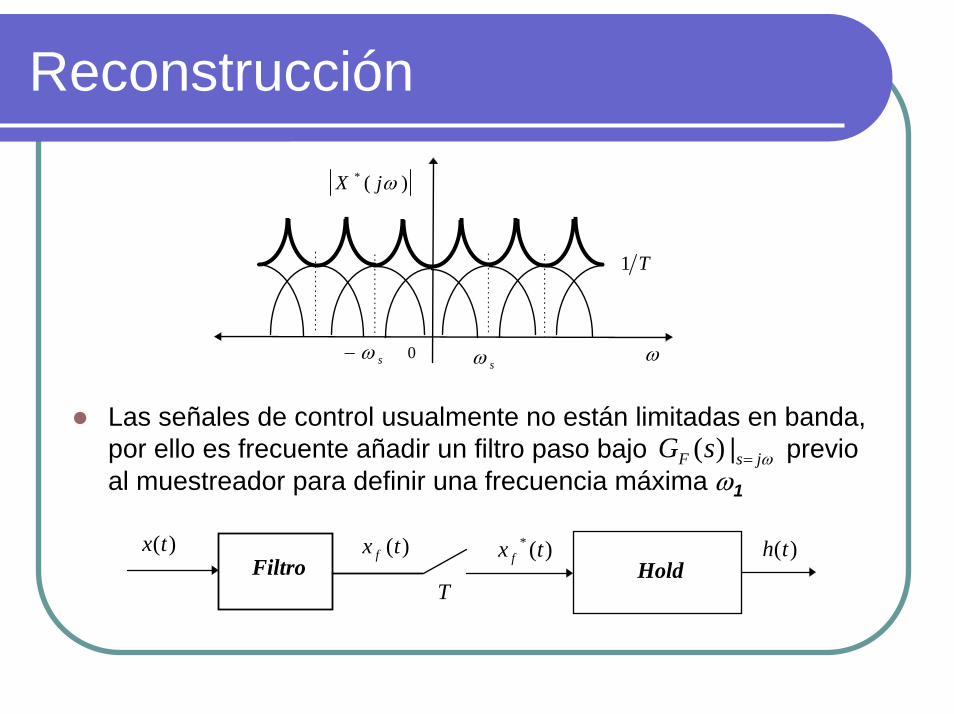
Las señales de control usualmente no están limitadas en banda, por ello es frecuente añadir un filtro paso bajo previo al muestreador para definir una frecuencia máxima ω1
ω
X j* ( )ω
0
1 T
− ω s ω s
x tf* ( )
THold
h t( )x t( ) x tf ( )Filtro
ωjsF sG =|)(
Reconstrucción
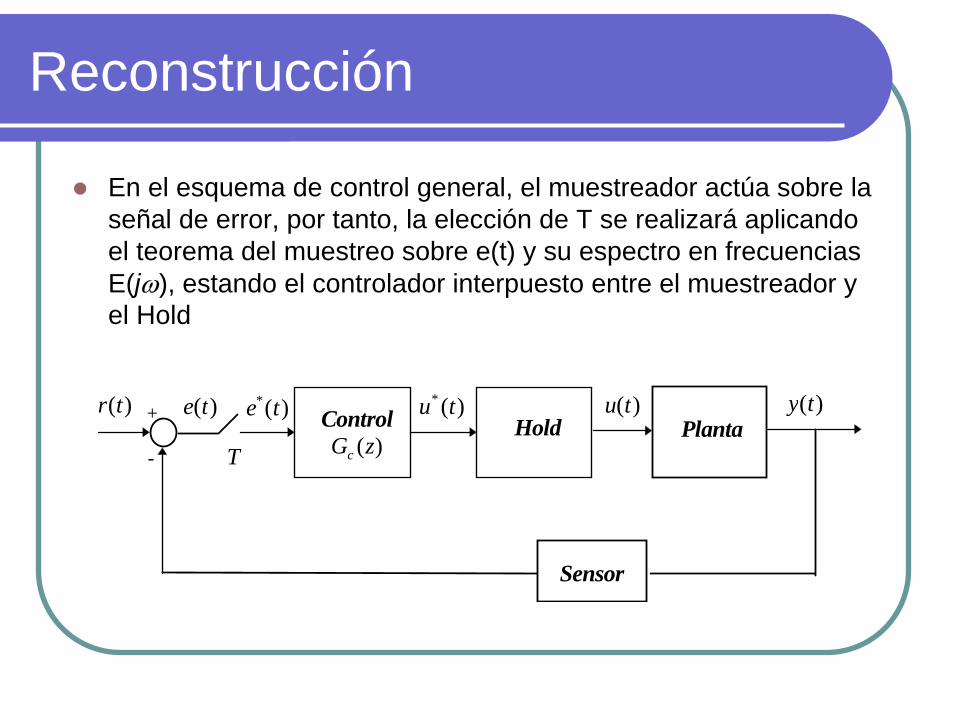
En el esquema de control general, el muestreador actúa sobre la señal de error, por tanto, la elección de T se realizará aplicando el teorema del muestreo sobre e(t) y su espectro en frecuencias E(jω), estando el controlador interpuesto entre el muestreador y el Hold
Hold Planta
Sensor
y t( )e t( )r t( ) +
-
u t( )ControlG zc ( )
u t* ( )
T
e t*( )
Reconstrucción
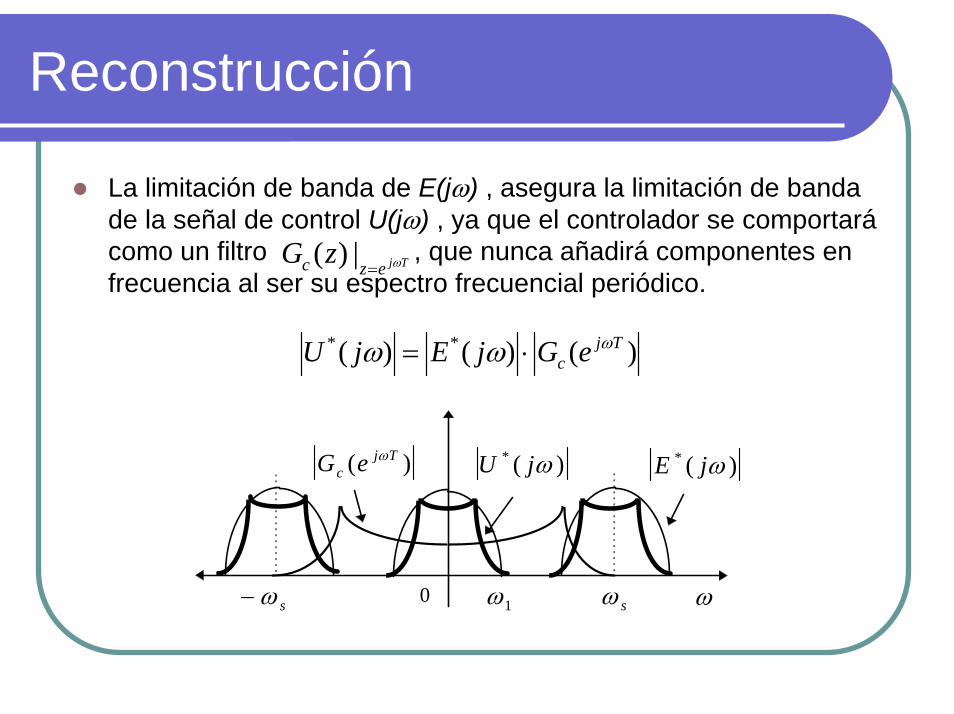
La limitación de banda de E(jω) , asegura la limitación de banda de la señal de control U(jω) , ya que el controlador se comportarácomo un filtro , que nunca añadirá componentes en frecuencia al ser su espectro frecuencial periódico.
Tjezc zG ω=|)(
)()()( ** Tjc eGjEjU ωωω ⋅=
ω
E j* ( )ω
0 ω1 ω s− ω s
G ecj T( )ω U j* ( )ω
Reconstrucción
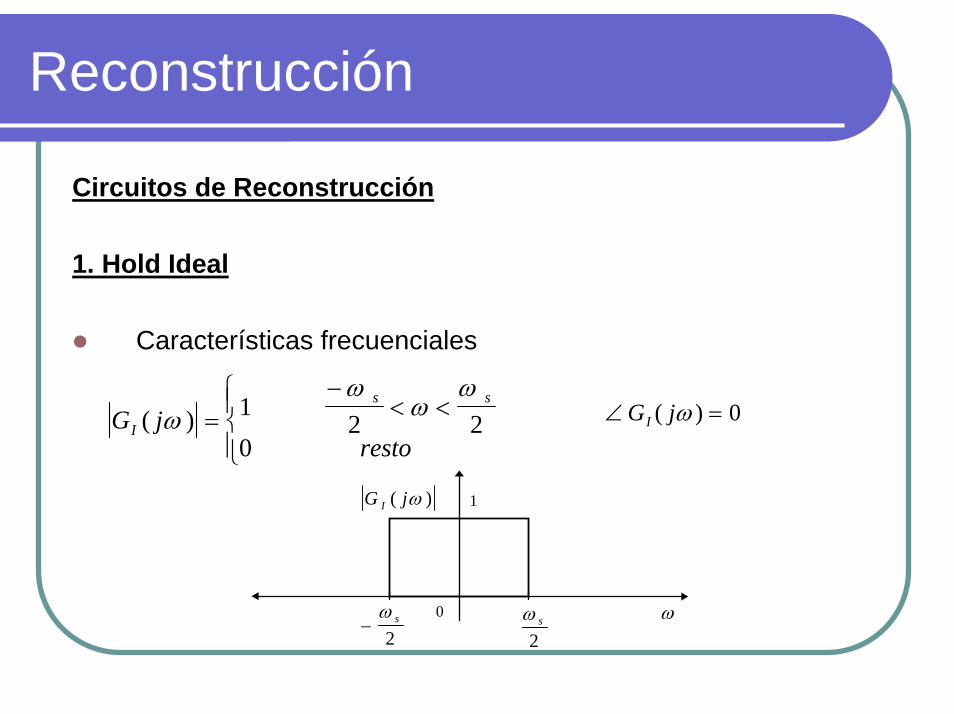
Circuitos de Reconstrucción
1. Hold Ideal
Características frecuenciales
G jresto
I
s s
( )ωω
ωω
=−
< <⎧⎨⎪
⎩⎪
12 2
0 ∠ =G jI ( )ω 0
ω
G jI ( )ω
0 ω s
2−ω s
2
1
Reconstrucción
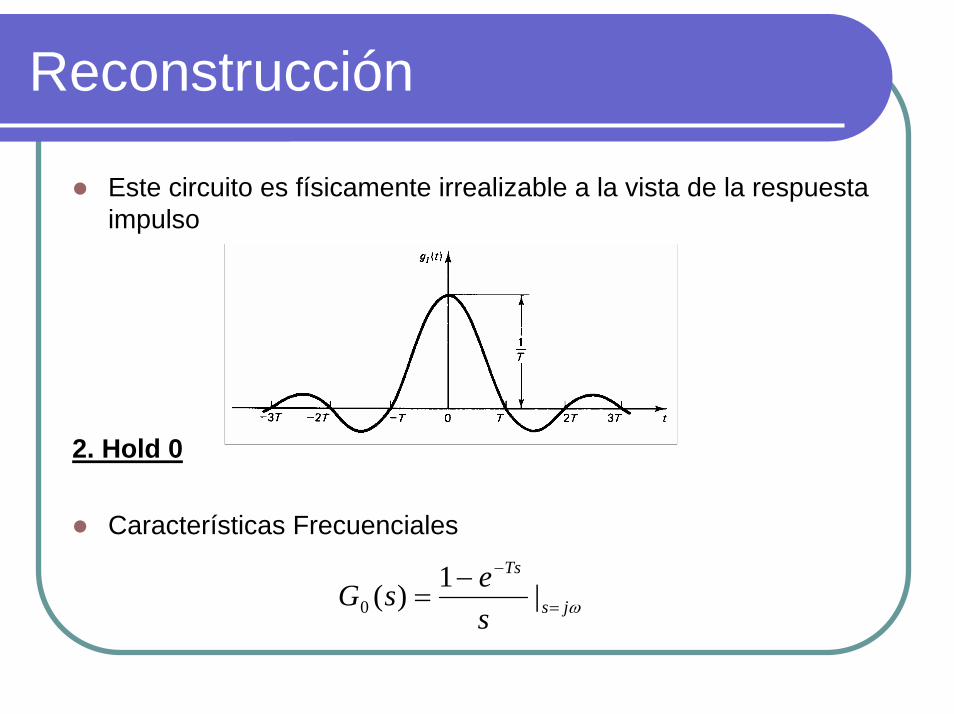
Este circuito es físicamente irrealizable a la vista de la respuesta impulso
2. Hold 0
Características Frecuenciales
ωjs
Ts
sesG =
−−= |1)(0
Reconstrucción
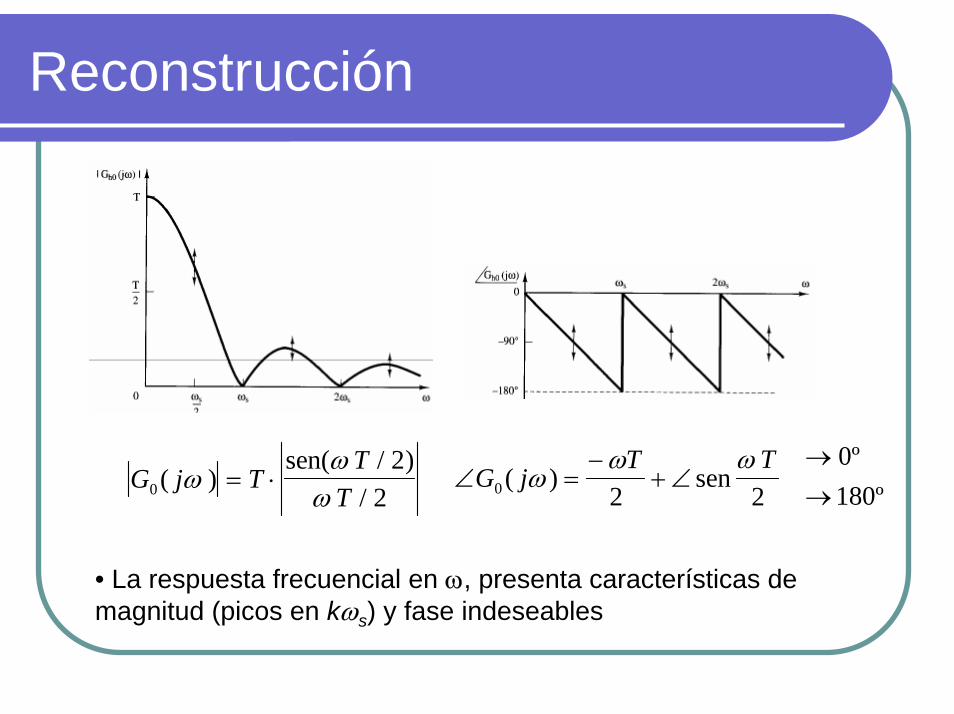
G j TT
T0
22
( )sen( / )
/ω
ωω
= ⋅ ∠ =−
+ ∠→→
G jT T
0 2 20180
( ) senº
ºω
ω ω
• La respuesta frecuencial en ω, presenta características demagnitud (picos en kωs) y fase indeseables
Reconstrucción
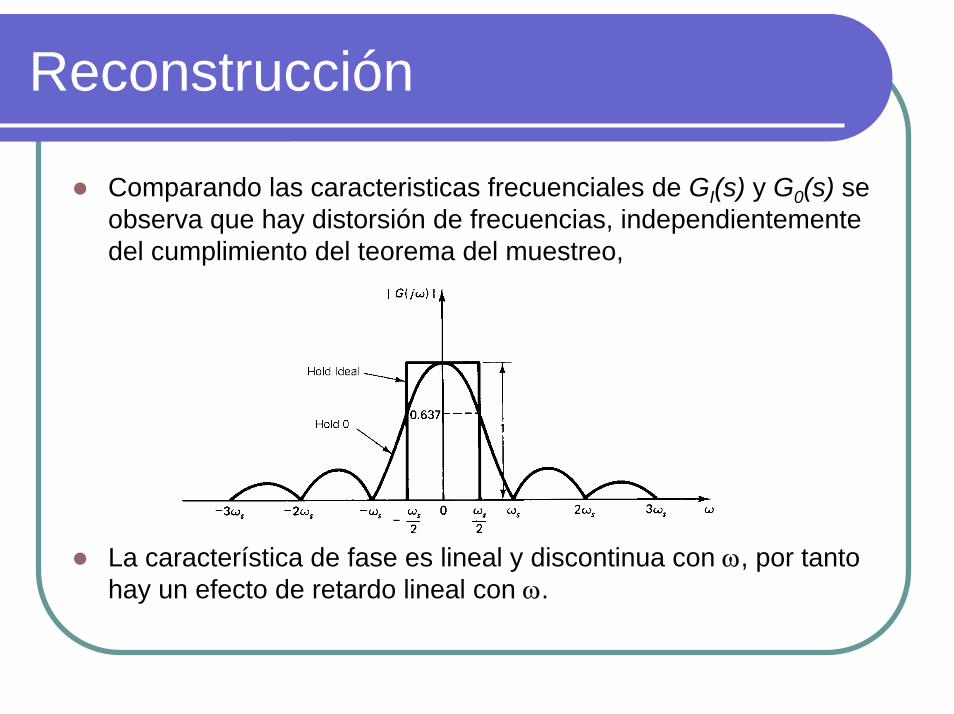
Comparando las caracteristicas frecuenciales de GI(s) y G0(s) se observa que hay distorsión de frecuencias, independientemente del cumplimiento del teorema del muestreo,
La característica de fase es lineal y discontinua con ω, por tanto hay un efecto de retardo lineal con ω.
Reconstrucción
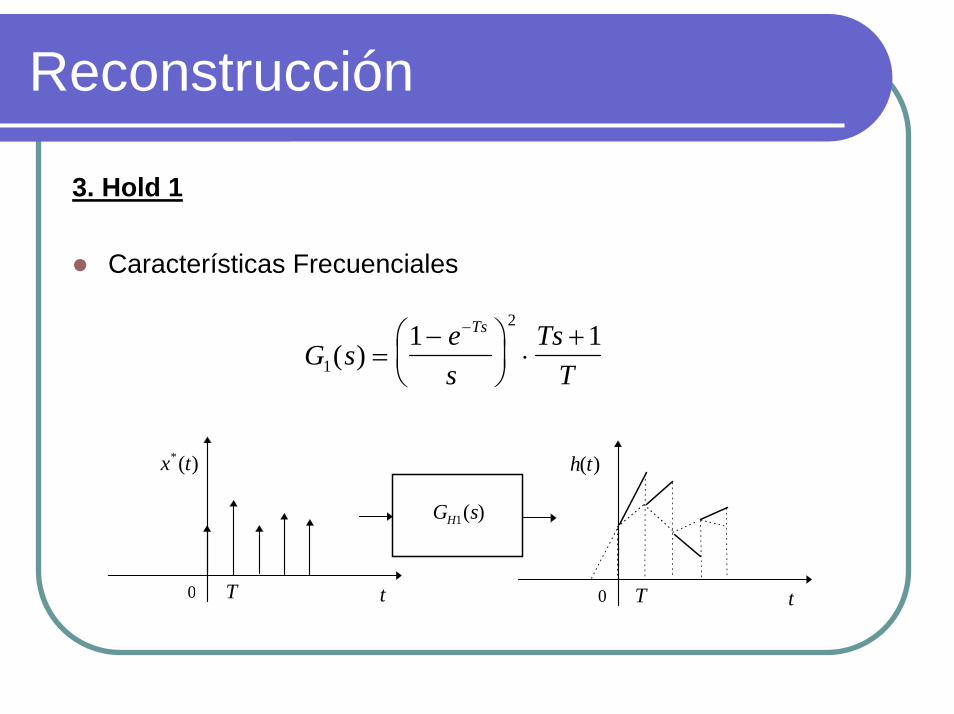
3. Hold 1
Características Frecuenciales
G ses
TsT
Ts
1
21 1
( ) =−⎛
⎝⎜
⎞⎠⎟ ⋅
+−
G sH1( )
t
x t*( )
0 T t
h t( )
0 T
Reconstrucción
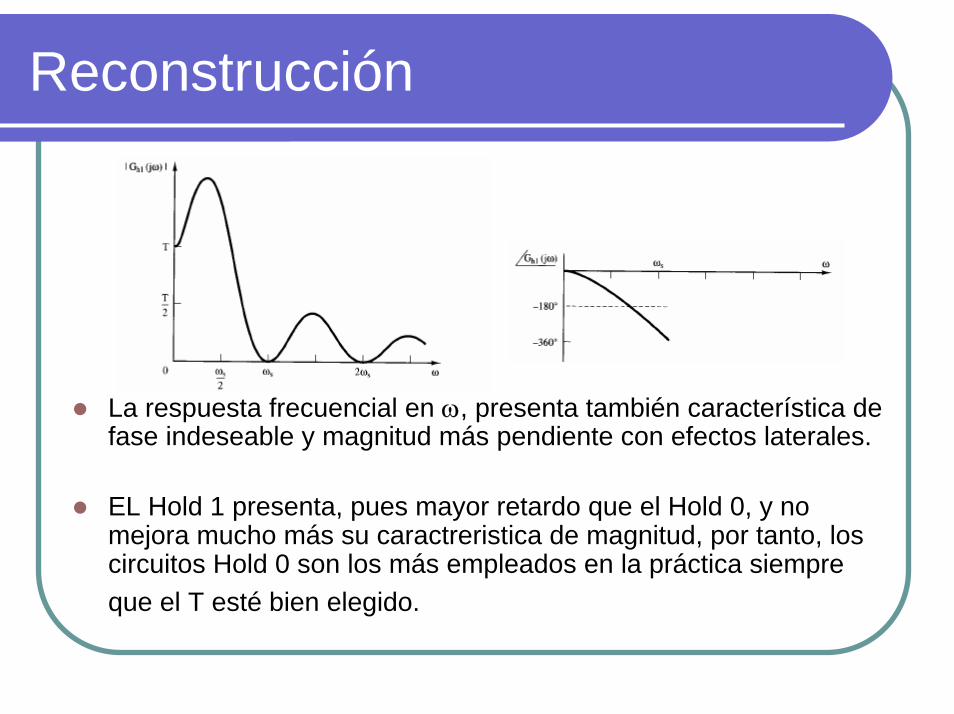
La respuesta frecuencial en ω, presenta también característica de fase indeseable y magnitud más pendiente con efectos laterales.
EL Hold 1 presenta, pues mayor retardo que el Hold 0, y no mejora mucho más su caractreristica de magnitud, por tanto, los circuitos Hold 0 son los más empleados en la práctica siempre que el T esté bien elegido.
Conversión D/A
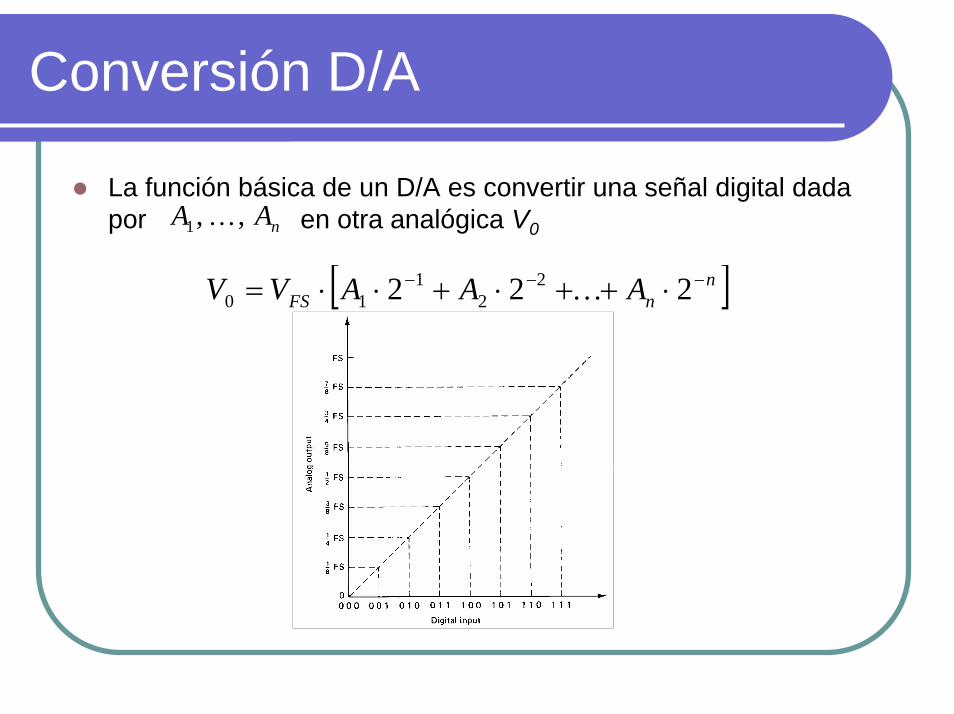
La función básica de un D/A es convertir una señal digital dada por en otra analógica V0A An1, ,K
[ ]nnFS AAAVV −−− ⋅++⋅+⋅⋅= 222 2
21
10 K
Conversión D/A
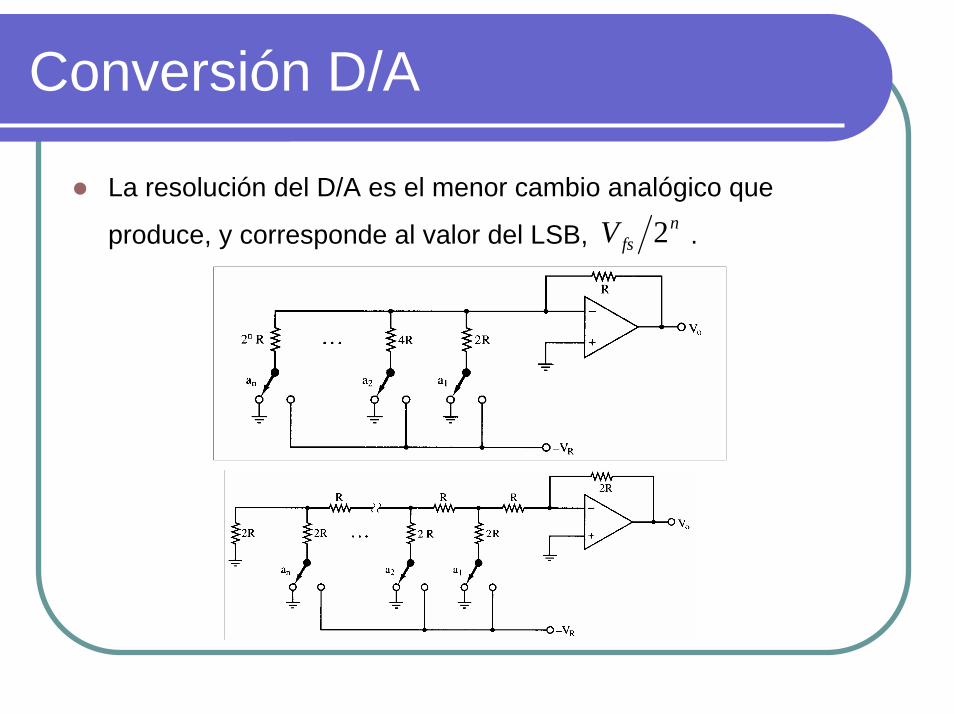
La resolución del D/A es el menor cambio analógico que
produce, y corresponde al valor del LSB, .Vfsn2
Conversión A/D
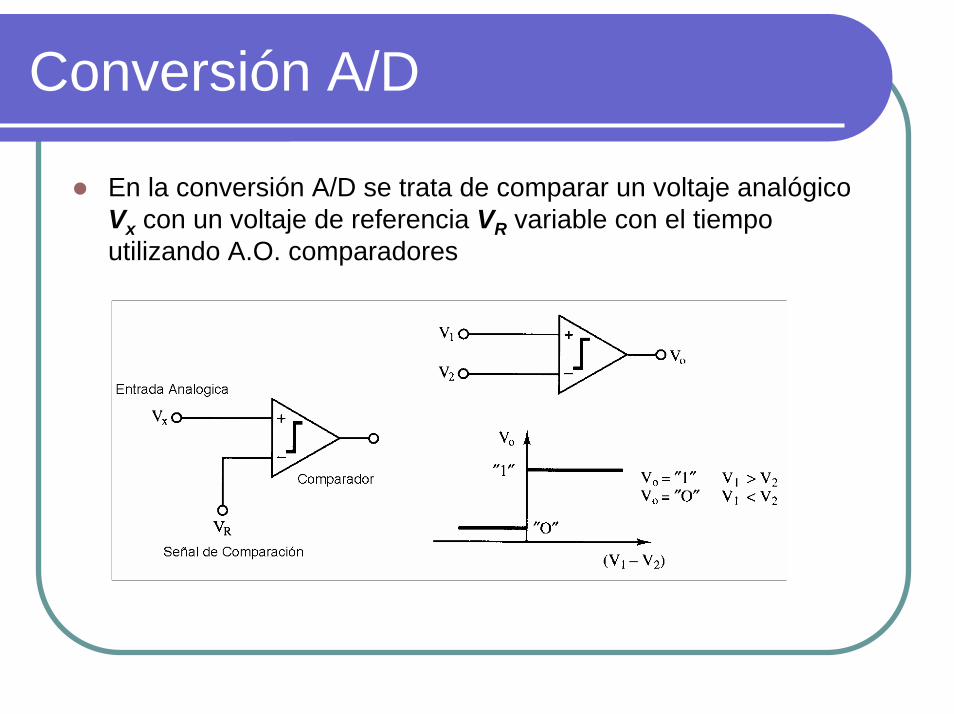
En la conversión A/D se trata de comparar un voltaje analógico Vx con un voltaje de referencia VR variable con el tiempo utilizando A.O. comparadores
Conversión A/D
El voltaje VR es variado para determinar cual de las posibles salidas binarias se aproxima más a Vx, a través de un convertidor D/A
Hay varios tipos de A/D, diferenciados básicamente en la estrategia usada para generar VR variable para obtener los Ai
1. Convertidor de Contador Rampa.2. Convertidor de Seguimiento.3. Convertidor de Aproximaciones Sucesivas.
in
iiFSR AVV −
=
⋅⋅= ∑ 21
Conversión A/D
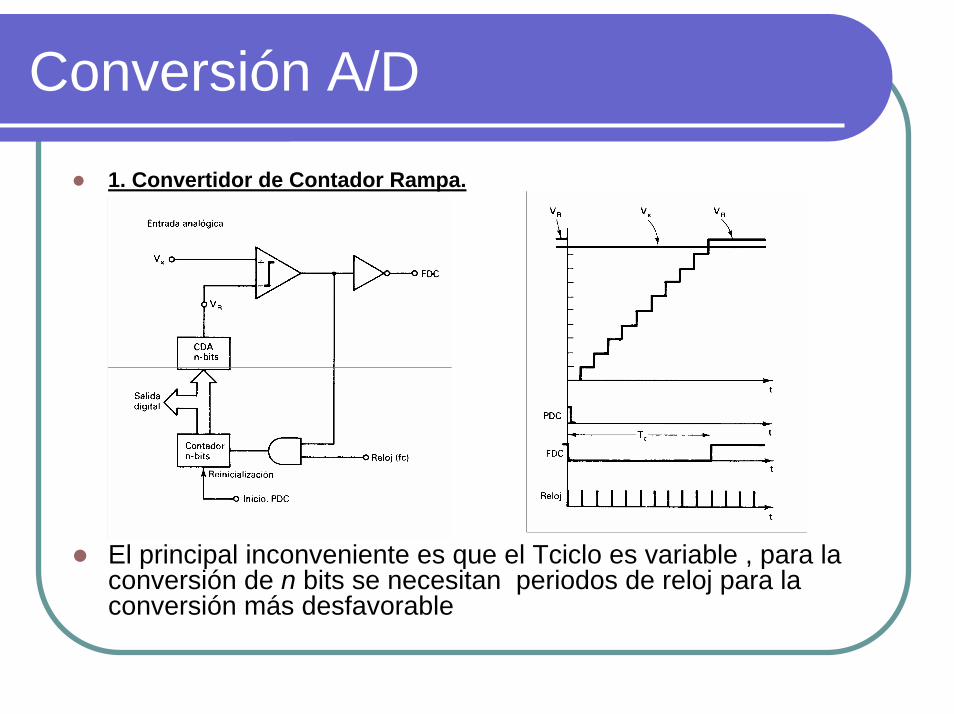
1. Convertidor de Contador Rampa.
El principal inconveniente es que el Tciclo es variable , para la conversión de n bits se necesitan periodos de reloj para la conversión más desfavorable
Conversión A/D
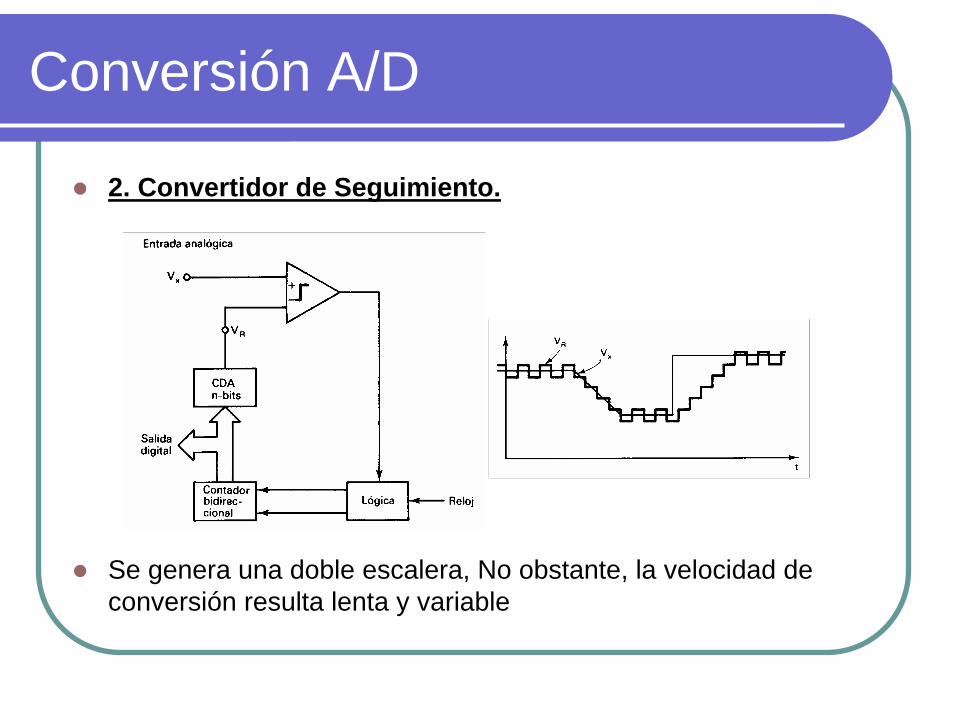
2. Convertidor de Seguimiento.
Se genera una doble escalera, No obstante, la velocidad de conversión resulta lenta y variable
Conversión A/D
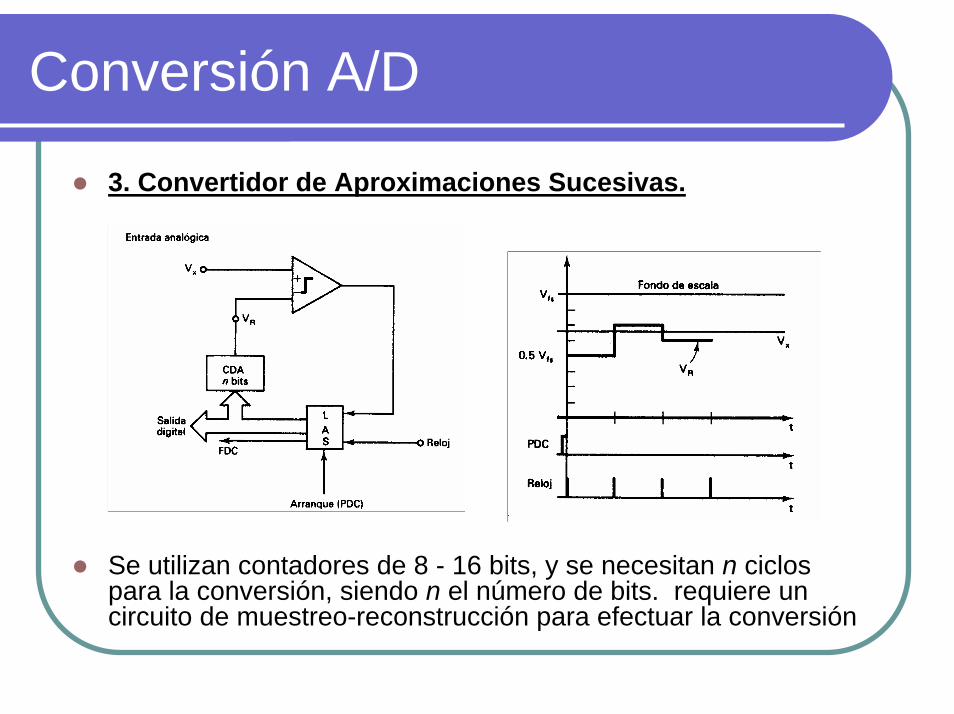
3. Convertidor de Aproximaciones Sucesivas.
Se utilizan contadores de 8 - 16 bits, y se necesitan n ciclos para la conversión, siendo n el número de bits. requiere un circuito de muestreo-reconstrucción para efectuar la conversión
Conversión A/D
Cuantificación
Es la representación de una señal continua en un número finito de valores discretos, o señal binaria. Para representar la señal continua se elegirán 2n valores discretos, siendo n el número de bits.
Los rangos de variación de voltaje analógico pueden ser unipolar o bipolar
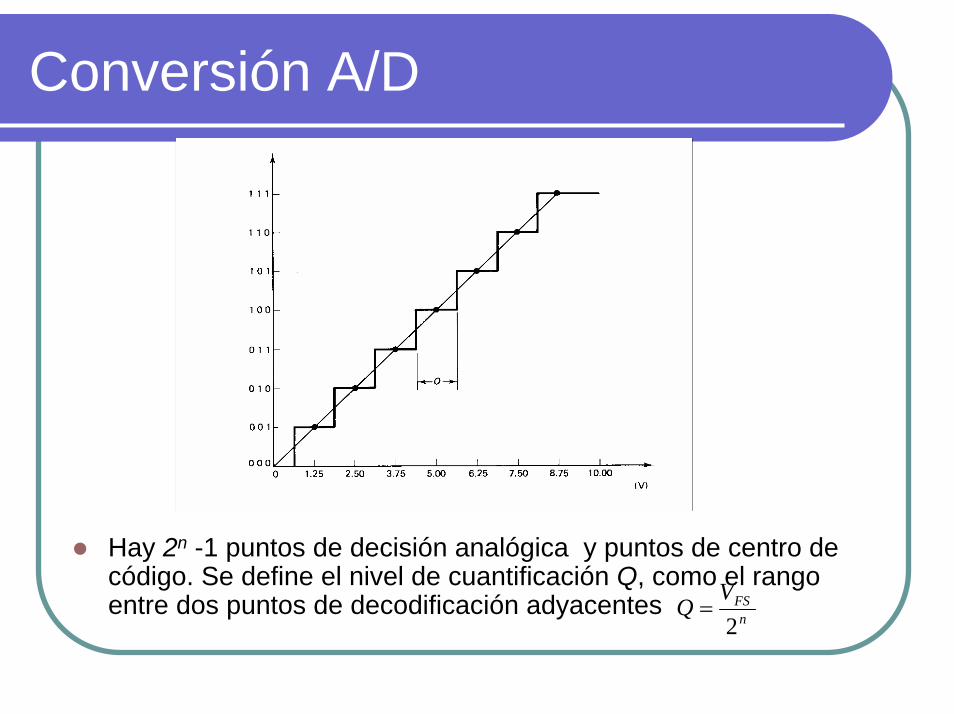
Ejemplo: Cuantificación para un convertidor A/D con n = 3 , unipolar 0-10 V.
Conversión A/D
Hay 2n -1 puntos de decisión analógica y puntos de centro de código. Se define el nivel de cuantificación Q, como el rango entre dos puntos de decodificación adyacentes
nFSV
Q2
=
Conversión A/D
El proceso de conversión produce el redondeo de cada valor analógico al nivel digital más próximo. Esto trae consigo un error de cuantificación eQ, que varía entre 0 y Para disminuirlo se elegirá n elevado.
La cuantificación supone, además, un ruido añadido N(µ,σ)definido por µ = 0 y por tanto, es deseable que n sea elevado (16 - 32 bits).
± ⋅05. Q
σ 22
12=
Q