tapa sym 180.qxd:maquetación 1 6/1/16 3:14 p.m. página 1publicidad.ventadewebs.com.ar/desde...
TRANSCRIPT
tapa SyM 180.qxd:Maquetación 1 6/1/16 3:14 p.m. Página 1
Descarga de CD
16 Saber Electrónica Nº 320
editorial Quark srl, saber internacional s.a. de C.V., el Club se y la revista saberelectrónica presentan este nuevo producto multimedia. Como lector de saberelectrónica puede descargar este Cd desde nuestra página web, grabar la imagen en undisco virgen y realizar el curso que se propone. Para realizar la descarga tiene que teneresta revista al alcance de su mano, dado que se le harán preguntas sobre su contenido.Para realizar la descarga, vaya al sitio: www.webelectronica.com.ar, haga clic en el íconopassword e ingrese la clave “Cd-1429”. deberá ingresar su dirección de correo electró-nico y, si ya está registrado, de inmediato podrá realizar la descarga siguiendo las ins-trucciones que se indiquen. si no está registrado, se le enviará a su casilla de correo ladirección de descarga (registrarse en webelectronica es gratuito y todos los sociosposeen beneficios).
Módulo 1: Teoría
1- Fuentes Conmutadas. Introducción. Configuraciones Básicas 2- Pasos para seguir la reparación de Fuentes Conmutadas en TV Color3- Fuentes Reguladas. Reguladores. Fuentes Reguladas de Tensión4- Operación y fallas en Fuentes Conmutadas5- Principios de Diseño. Generalidades sobre las Fuentes de AlimentaciónConmutadas (FAC)6- Reparación de Fuentes de PC. Detección de fallas 7- Reparación de Fuentes Conmutadas, basado en un TV Noblex con chasisSamsung.8- Teoría de operación de las Fuentes de Alimentación Conmutada. Principiosde Operación
Módulo 2: diagraMas
1- Fuente Sony KV252- Fuente Telefunken VCR DV113- Fuente BECO-TVT4- Fuente Daewo 2590/28955- Fuente Daewo C-50NA6- Fuente Funai 25007- Fuente Funai MS148- Fuente Funai MS209- Fuente Genérica DMS1410- Fuente Goldstar 2529CE11- Fuente Goldstar 2122 12- Fuente Goldstar 213313- Fuente Goldstar PC3314- Fuente JVC 14015- Fuente JVC 215516- Fuente JVC AV2017- Fuente JVC AVJ2118- Fuente LG 1420/2119- Fuente LG 2420/2120- Fuente LG 242021- Fuente LG252922- Fuente Nokia 716423- Fuente Panasonic 1421S124- Fuente Panasonic 2170
25- Fuente Panasonic 25V70
26- Fuente Panasonic 2832
27- Fuente Panasonic 2150
28- Fuente Record 4029
29- Fuente Salora 2128
30- Fuente Samsung 5035
31- Fuente Samsung 5324/5062
32- Fuente Samsung 6202/7202
33- Fuente Sharp 21Tfn1
34- Fuente Sony 21M111
35- Fuente Sony 1431
36- Fuente Sony 2155
37- Fuente Sony KV14M
38- Fuente Sony 1431CD
39- Fuente Sony 2161/62/63
etc.
Módulo 3: PrograMas e insTruMenTos VirTuales
GENERADORES:
BIP Electronics Labs 3.0
Sine Wave Generator
BIP FreeWare Fun
ANALIZADORES
LF SPECTRUM ANALYSER
OSCILOSCOPIOS
PBD
Scope, Xilscope
Módulo 4: Videos
Funcionamiento de las Fuentes Conmutadas
Necesidad de las Fuentes Conmutadas
Tips para la Reparación de Fuentes Conmutadas
Cómo Saber si Una Fuente está Oscilando
Mediciones en Fuentes Conmutadas
Reparación de Fuentes de Consolas de Videojuegos
Todo SobreTodo Sobre
Fuentes ConmutadasFuentes Conmutadas
pags 16 ok:ArtTapa 23/02/14 12:48 Page 16

TÉCNICO SUPERIOR EN ELECTRÓNICA
CONSTITUCIÓN DE LA CARRERA Y FORMA DE ESTUDIO
En febrero de 2012, en Saber Electrónica Nº 295, comenzamos el dictado de lacarrera de “Técnico Superior en Electrónica”, con una extensión de 3 años, divididaen 6 etapas, de 6 lecciones mensuales cada etapa.
Se trata de un sistema de estudio que se basa en guías de estudio impresas enpapel y CDs Multimedia Interactivos.
El alumno puede estudiar a razón de una lección por mes y “no podrá rendirexámenes libres” lo que significa que sin importar los estudios previos que posea, elalumno podrá rendir un examen por mes como máximo y 6 exámenes por año comomínimo. Esto significa que el tiempo mínimo para completar la carrera es de 3 añosy el tiempo máximo queda fijo en 6 años.
Para realizar el estudio la mecánica es la siguiente:
1) El alumno debe descargar gratuitamente el CD correspondiente a la primeralección de la primera etapa desde nuestra web: www.webelectronica.com.ar, hacien-do clic en el ícono password e ingresando la clave CURSOE1L1.
2) El alumno deberá explorar el contenido del CD y si desea realizar los estudiosde la carrera debe inscribirse gratuitamente como alumno regular siguiendo lospasos sugeridos en el CD.
3) El alumno estudiará todas las secciones correspondientes a cada lección ypodrá realizar consultas por Internet, asistir a videoconferencias y a las clases deapoyo que se programen.
4) A partir del momento en que se inscribe como alumno, tiene un tiempo máximode 3 meses para rendir el primer Test de Evaluación por Internet. En caso de no hacer-lo será dado de baja y no podrá retomar los estudios hasta que transcurra un períodomínimo de 6 meses, luego del cual deberá volver a inscribirse como alumno regular.
5) El Test se aprueba con 7 puntos y en caso de reprobar se le enviará un nuevoexamen que deberá realizar luego de transcurrido un tiempo mínimo de un mes, conun máximo de 3 meses. Si vuelve a reprobar deberá solicitar un nuevo Test, el cualtendrá un costo equivalente a $25.
TeoríaCURSO DE TÉCNICO SUPERIOR EN ELECTRÓNICA
Técnico en Electrónicay Microcontroladores
Damos comienzo a la quinta etapa de la carrera de TécnicoSuperior en Electrónica, dedicada a la electrónica digital com-pleja, en la que se estudia todo lo correspondiente a los micro-controladores y su aplicación en Sistemas Electrónicos.Para poder abordar este módulo de estudio es preciso que elalumno haya estudiado y aprobado las cuatro etapas anterio-res, cuya constitución mencionamos a continuación.
ETAPA 5
Técnico en Electrónica y Microcontroladores 17
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 17
6) Una vez aprobado el test de evaluación podrá solicitar la descarga del CDMultimedia correspondiente a la segunda lección. A partir de la segunda lección,cada CD multimedia tiene costo.
7) La mecánica para el estudio de cada lección de las diferentes etapas es elmismo que lo ya explicado en los puntos (2) a (6).
8) Cuando culmine los estudios de cada etapa el alumno recibirá un TítuloIntermedio”. Otorgándosele un Diploma que acredita los logros obtenidos. Al culmi-nar los estudios de cada etapa, el título obtenido es el siguiente:
8.1) Etapa 1: Idóneo en Electrónica8.2) Etapa 2: Técnico en Semiconductores8.3) Etapa 3: Técnico en Electrónica Digital8.4) Etapa 4: Técnico en Sistemas de Audio8.5) Etapa 5: Técnico en Electrónica y Microcontroladores8.6) Etapa 6: Técnico en Telecomunicaciones
9) Al obtener el título de la sexta etapa automáticamente se graduará comoTécnico Superior en Electrónica.
SOBRE EL ESTUDIO DE CADA LECCIÓN
Cada lección o guía de estudio se compone de 3 secciones: teoría, práctica ytaller. Con la teoría aprende los fundamentos de cada tema que luego fija con lapráctica. En la sección “taller” se brindan sugerencias y ejercicios técnicos. Para quenadie tenga problemas en el estudio, los CDs multimedia del Curso en CD están con-feccionados de forma tal que Ud. pueda realizar un curso en forma interactiva,respetando el orden, es decir estudiar primero el módulo teórico y luego realizar lasprácticas propuestas.
Por razones de espacio, en la revista Saber Electrónica sólo se edita una partede la guía de estudio, razón por la cual puede descargarlas de nuestra web, sincargo, ingresando a www.webelectronica.com.ar, haciendo clic en el ícono passworde ingresando la clave dada en cada revista. La guía está en formato pdf, por lo cualal descargarla podrá imprimirla sin ningún inconveniente para que tenga la leccióncompleta.
El CD de la lección 1, de la etapa 1, lo puede descargar GRATIS y así podrá com-probar la calidad de esta CARRERA de Técnico Superior en Electrónica. A partir de lalección 2, el CD de cada lección tiene un costo de $25, Ud. lo abona por diferentesmedios de pago y le enviamos las instrucciones para que Ud. lo descargue desde laweb con su número de serie. Con las instrucciones dadas en el CD podrá hacer pre-guntas a su "profesor virtual" - Robot Quark- (es un sistema de animación contenidoen los CDs que lo ayuda a estudiar en forma amena) o aprender con las dudas de sucompañero virtual - Saberito- donde los profesores lo guían paso a paso a través dearchivos de voz, videos, animaciones electrónicas y un sin fin de recursos prácticosque le permitirán estudiar y realizar autoevaluaciones (Test de Evaluaciones) per-iódicas para que sepa cuánto ha aprendido. Puede solicitar las instrucciones dedescarga del CD que corresponde a esta lección, es decir, el CD Nº1 de la CuartaEtapa y/o los CDs de las lecciones tanto de la Primera Etapa como de la SegundaEtapa de este Curso enviando un mail a [email protected] o lla-mando al teléfono de Buenos Aires (11) 4301-8804.
SOBRE EL RECONOCIMIENTO DE LA UNIVERSIDAD TECNOLÓGICA NACIONAL
En la medida que vamos completando la edición de cada etapa, presentamos elplan de estudio realizado ante las autoridades competentes de la UniversidadTecnológica Nacional de la República Argentina con el objeto de que los títulos que
Lección 1, Etapa 5
18 Etapa 5
Esta es la primera lección de la quinta etapa delCur so de Elec tró ni ca Mul ti me dia, In te rac ti vo, deen se ñan za a dis tan cia y por me dio de In ter netque presentamos en Saber Electrónica Nº 295.
El Cur so se com po ne de 6 ETA PAS y ca da unade ellas po see 6 lec cio nes con teo ría, prác ti -cas, ta ller y Test de Eva lua ción. La es truc tu radel cur so es sim ple de mo do que cual quierper so na con es tu dios pri ma rios com ple tospue da es tu diar una lec ción por mes si le de di -ca 8 ho ras se ma na les pa ra su to tal com pren -sión. Al ca bo de 3 años de es tu dios cons tan -tes po drá te ner los co no ci mien tos que lo acre -di ten co mo Téc ni co Su pe rior en Elec tró ni ca.
Ca da lec ción se com po ne de una guía de es -tu dio y un CD mul ti me dia in te rac ti vo.
El alum no tie ne la po si bi li dad de ad qui rir unCD Mul ti me dia por ca da lec ción, lo que lo ha -bi li ta a rea li zar con sul tas por In ter net so brelas du das que se le va yan pre sen tan do.
Tan to en Ar gen ti na co mo en Mé xi co y en va -rios paí ses de Amé ri ca La ti na al mo men to dees tar cir cu lan do es ta edi ción se pon drán enven ta los CDs del “Curso Multimedia deElectrónica en CD”, el vo lu men 1 de la pri-mera etapa co rres pon de al es tu dio de la lec -ción Nº 1 de es te cur so (aclaramos que enSaber Electrónica Nº 295 publicamos la guíaimpresa de la lección 1), el vo lu men 6 de di -cho Curso en CD co rres pon de al es tu dio de lalec ción Nº 6.
Ud. está leyendo la parte teórica de la primeralección de la quinta etapa y el CD correspon-diente es el de la Etapa 5, Lección 1.
Para adquirir el CD correspondiente a cadalección debe enviar un mail a: [email protected]. El CD correspondiente a la lección 1 esGRATIS, y en la edición Nº 295 dimos lasinstrucciones de descarga. Si no poee larevista, solicite dichas instrucciones de des-carga gratuita a: [email protected]
A partir de la lección Nº 2 de la primera eta-pas, cuya guía de estudio fue publicada enSaber Electrónica Nº 296, el CD (de cada lec-ción) tiene un costo de $25 (en Argentina) ypuede solicitarlo enviando un mail a [email protected]
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 18
Teoría
entregamos sean reconocidos por la mencionada Alta Casa de Estudio. A junio de2013 la UTN reconocía los estudios correspondientes a las etapas 1 y 2 (Idóneo enElectrónica y Técnico en Semiconductores) y el Club Saber Electrónica comenzabalas acciones para el reconocimiento de la tercera etapa. Ya hemos presentado elplan de estudio y las lecciones correspondientes a la TERCERA ETAPA y el mes próx-imo haremos lo propio con la CUARTA ETAPA. Los alumnos que poseen los Diplomasotorgados por el Club Saber Electrónica pueden solicitar el Reconocimiento de laUTN sin tener que rendir ningún examen adicional, abonando un canon por gastosadministrativos que a junio de 2013 eran de $200 por etapa.
SOBRE LA QUINTA ETAPA: “TÉCNICO EN ELECTRÓNICA Y MICROCONTROLADORES”
EL estudiante ya tiene todos los conocimientos necesarios como para desem-peñarse como Técnico en Electrónica en empresas, fábricas, industrias, etc. y eshora de especializarse.
Al comenzar los estudios de esta etapa el alumno ya posee conocimiento sobrelas leyes fundamentales de la electrónica y estudió el comportamiento de los semi-conductores, habiendo realizado prácticas con instrumental básico de taller.También estudió las familias lógicas, el comportamiento de las principales com-puertas, conoce las leyes fundamentales de la electrónica digital, sabe realizar sín-tesis de funciones y se capacitó en el funcionamiento de programas simuladores quele permiten tomar experiencia con circuitos integrados complejos. Está capacitadoen el manejo de las técnicas digitales y su interacción con las diferentes tecnologíaselectrónicas. Es por eso que en esta etapa se especializa en una de las ramas másimportantes de la electrónica digital: “Los Microcontroladores”.
En la primera lección se estudia qué son los microcontroladores, cuáles son suscaracterísticas, las diferentes estructuras, dónde se los emplea, cómo fueron evolu-cionando y cuáles son los bloques que los integran.
La segunda lección está destinada a explicar la estructura interna de los micro-controladores de Microchip, nos referimos a los PICs, quizá los más conocidos delmercado. El alumno aprenderá a programar en lenguaje Assembler y hará prácticascon dichos componentes.
La tercera lección trata sobre una familia basada en los PICs de Microchip; nosreferimos a los microcontroladores PICXE, quienes poseen un entorno de desarrollobastante amigable con el que el alumno aprenderá a manejarlos en forma intuitiva,mediante diagramas de flujo y la conversión de programas a lenguaje Basic.
En la cuarta lección se estudian los microcontroladores AVR de Atmel, mostran-do la diferencia existente con los PIC de Microchip y cuáles son sus ventajas.Comienza a programar en lenguaje C y empieza a desarrollar sistemas microproce-sados.
Llega el momento de conocer a la plataforma Arduino, tema excluyente de laquinta lección de esta quinta etapa y, quizá, la más importante desde el punto devista de su formación como “Técnico en Microcontroladores” ya que combina lasdiferentes plataformas, incorporando la conocida “Basic Stamp” para el desarrollode sistemas complejos con microcontroladores.
La última lección de la quinta etapa está destinada al estudio de microcontro-ladores específicos, comenzando por los MCH de Motorola, siguiendo con los TDA dePhillips, los COP de National, etc.
Al término de esta lección, y luego de rendir los Test de EvaluaciónCorrespondientes, tendrá el Título de “Técnico en Electrónica y Microcontroladores”.
A continuación, damos comienzo a esta etapa, estudiando la “parte teórica” dela primera lección, en la que aprenderemos “qué son los microcontroladores”.
Técnico en Electrónica y Microcontroladores 19
CURSO DE TÉCNICO SUPERIOR EN ELECTRÓNICA
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 19
INTRODUCCIÓN
Se pretende explicar conceptos cuya vigencia se mantendrá en un periodo mas
o menos largo, centrándose en una familia de microcontroladores tradicional.
La forma de estructurar el tema responde a la experiencia de que, para quien por
primera vez estudia microcontroladores, resulta más sencillo aprender primero lo
referente a la construcción interna del dispositivo y la arquitectura general de los
microcontroladores y una vez entendido pasar entonces a los detalles.
QUÉ ES UN MICROCONTROLADOR
Los microcontroladores están conquistando el mundo. Están presentes en nues-
tro trabajo, en nuestra casa y en nuestra vida, en general. Se pueden encontrar con-
trolando el funcionamiento de los ratones y teclados de los computadoras, en los
teléfonos, en los hornos microondas y los televisores de nuestro hogar. Pero la inva-
sión acaba de comenzar y el siglo XXI será testigo de la conquista masiva de estos
diminutos computadores, que gobernarán la mayor parte de los aparatos que fabri-
quemos y usaremos los humanos.
CONTROLADOR Y MICROCONTROLADOR
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno
de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento
de un horno eléctrico dispone de un sensor que mide constantemente su tempera-
tura interna y actúa sobre las resistencias para mantener la temperatura dentro del
rango establecido.
Aunque el concepto de controlador ha permanecido invariable a través del tiem-
po, su implementación física ha variado frecuentemente. Hace tres décadas, los con-
troladores electrónicos se construían exclusivamente con componentes de lógica
discreta, posteriormente se emplearon los microprocesadores, que se rodeaban con
chips de memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos
los elementos del controlador se han podido incluir en un solo circuito integrado, el
cual recibe el nombre de microcontrolador. Realmente consiste en un sencillo pero
completo ordenador contenido en un circuito integrado.
Un microcontrolador es un circuito integrado de alta escala de integración que
Lección 1, Etapa 5
20 Etapa 5
Desde la invención del circuito integrado, el desarrollo constan-te de la electrónica digital ha dado lugar a dispositivos cada vezmás complejos. Entre ellos los microprocesadores y los micro-controladores. El objetivo principal de esta lección es que elalumno logre un entendimiento básico de los microcontrolado-res y obtenga los conocimientos necesarios para la programa-ción de estos dispositivos y para el diseño de sistemas digitalesy/o analógicos basados en ellos.
ETAPA 5 - LECCIÓN Nº 1
Qué son los Microcontroladores
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 20
Teoría
incorpora la mayor parte de los elementos que configuran un controlador y que con-
tiene todos los componentes fundamentales de un ordenador, aunque de limitadas
prestaciones y que se suele destinar a gobernar una sola tarea.
En su memoria sólo reside un programa que controla en funcionamiento de una
tarea determinada, sus líneas de entrada/salida se conectan a los sensores y actua-
dores del dispositivo a controlar y, debido a su pequeño tamaño, suele ir integrado
en el propio dispositivo al que gobierna.
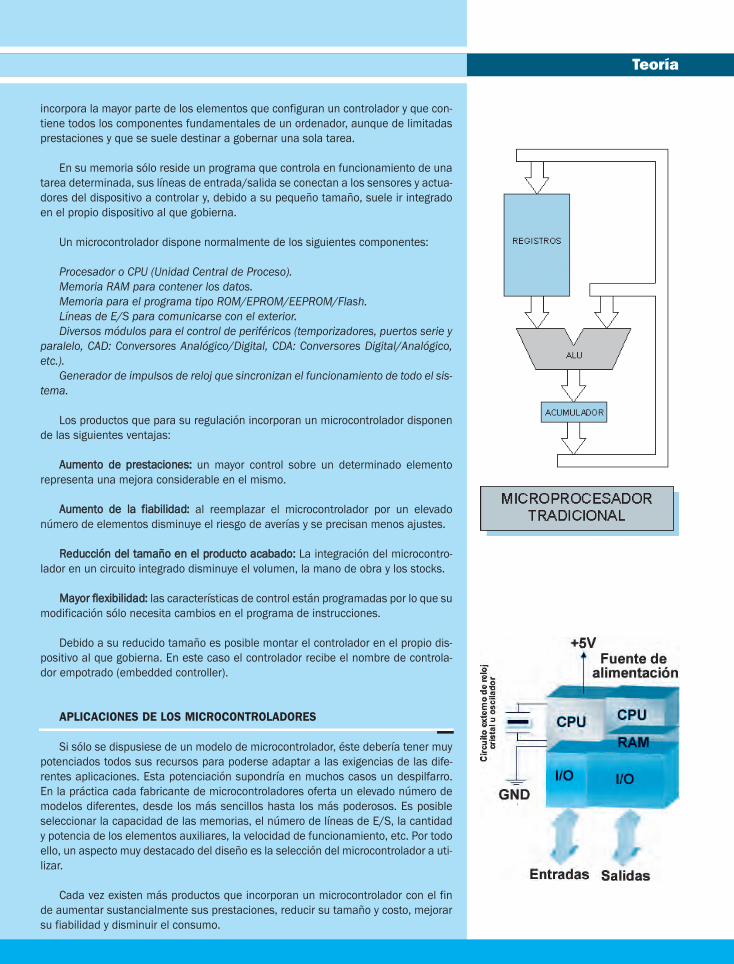
Un microcontrolador dispone normalmente de los siguientes componentes:
Procesador o CPU (Unidad Central de Proceso).Memoria RAM para contener los datos.Memoria para el programa tipo ROM/EPROM/EEPROM/Flash.Líneas de E/S para comunicarse con el exterior.Diversos módulos para el control de periféricos (temporizadores, puertos serie y
paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores Digital/Analógico,etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el sis-tema.
Los productos que para su regulación incorporan un microcontrolador disponen
de las siguientes ventajas:
Aumento de prestaciones: un mayor control sobre un determinado elemento
representa una mejora considerable en el mismo.
Aumento de la fiabilidad: al reemplazar el microcontrolador por un elevado
número de elementos disminuye el riesgo de averías y se precisan menos ajustes.
Reducción del tamaño en el producto acabado: La integración del microcontro-
lador en un circuito integrado disminuye el volumen, la mano de obra y los stocks.
Mayor flexibilidad: las características de control están programadas por lo que su
modificación sólo necesita cambios en el programa de instrucciones.
Debido a su reducido tamaño es posible montar el controlador en el propio dis-
positivo al que gobierna. En este caso el controlador recibe el nombre de controla-
dor empotrado (embedded controller).
APLICACIONES DE LOS MICROCONTROLADORES
Si sólo se dispusiese de un modelo de microcontrolador, éste debería tener muy
potenciados todos sus recursos para poderse adaptar a las exigencias de las dife-
rentes aplicaciones. Esta potenciación supondría en muchos casos un despilfarro.
En la práctica cada fabricante de microcontroladores oferta un elevado número de
modelos diferentes, desde los más sencillos hasta los más poderosos. Es posible
seleccionar la capacidad de las memorias, el número de líneas de E/S, la cantidad
y potencia de los elementos auxiliares, la velocidad de funcionamiento, etc. Por todo
ello, un aspecto muy destacado del diseño es la selección del microcontrolador a uti-
lizar.
Cada vez existen más productos que incorporan un microcontrolador con el fin
de aumentar sustancialmente sus prestaciones, reducir su tamaño y costo, mejorar
su fiabilidad y disminuir el consumo.
Técnico en Electrónica y Microcontroladores 21
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 21

Algunos fabricantes de microcontroladores superan el millón de unidades de un
modelo determinado producidas en una semana. Este dato puede dar una idea de
la masiva utilización de estos componentes.
Los microcontroladores están siendo empleados en multitud de sistemas pre-
sentes en nuestra vida diaria, como pueden ser juguetes, horno microondas, frigorí-
ficos, televisores, ordenadores, impresoras, módems, el sistema de arranque de
nuestro coche, etc. Y otras aplicaciones con las que seguramente no estaremos tan
familiarizados como instrumentación electrónica, control de sistemas en una nave
espacial, etc. Una aplicación típica podría emplear varios microcontroladores para
controlar pequeñas partes del sistema. Estos pequeños controladores podrían
comunicarse entre ellos y con un procesador central, probablemente más potente,
para compartir la información y coordinar sus acciones, como, de hecho, ocurre ya
habitualmente en cualquier PC.
Los microcontroladores se encuentran por todas partes:
Sistemas de comunicación: en grandes automatismos como centrales y en telé-fonos fijos, móviles, fax, etc.
Electrodomésticos: lavadoras, hornos, frigoríficos, lavavajillas, batidoras, televi-sores, vídeos, reproductores DVD, equipos de música, mandos a distancia, consolas,etc.
Industria informática: Se encuentran en casi todos los periféricos; ratones, tecla-dos, impresoras, escáner, etc.
Automoción: climatización, seguridad, ABS, etc.Industria: Autómatas, control de procesos, etc.Sistemas de supervisión, vigilancia y alarma: ascensores, calefacción, aire acon-
dicionado, alarmas de incendio, robo, etc.Otros: Instrumentación, electromedicina, tarjetas (smartcard), sistemas de nave-
gación, etc.
La distribución de las ventas según su aplicación es la siguiente, figura 1. Una
tercera parte se absorbe en las aplicaciones relacionadas con los ordenadores y sus
periféricos. La cuarta parte se utiliza en las aplicaciones de consumo (electrodo-
mésticos, juegos, TV, vídeo, etc.) El 16% de las ventas mundiales se destinó al área
de las comunicaciones. Otro 16% fue empleado en aplicaciones industriales. El resto
de los microcontroladores vendidos en el mundo, aproximadamente un 10% fueron
adquiridos por las
industrias de automo-
ción.
También los
modernos microcon-
troladores de 32 bits
van afianzando sus
posiciones en el mer-
cado, siendo las áreas
de más interés el pro-
cesamiento de imáge-
nes, las comunicacio-
nes, las aplicaciones
militares, los procesos
industriales y el con-
trol de los dispositivos
de almacenamiento
masivo de datos.
Lección 1, Etapa 5
22 Etapa 5
Figura 1
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 22

Teoría
La figura 2 muestra un ejemplo de
aplicación de un microcontrolador en el
automóvil.
EL MERCADO DE LOS MICROCONTROLADORES
Aunque en el mercado de la microin-
formática la mayor atención la acaparan
los desarrollos de los microprocesadores,
lo cierto es que se venden cientos de
microcontroladores por cada uno de
aquéllos.
La figura 3 muestra la producción
mundial de microcontroladores por año.
Existe una gran diversidad de micro-
controladores. Quizá la clasificación más
importante sea entre microcontroladores de 4, 8, 16 ó 32 bits. Aunque las presta-
ciones de los microcontroladores de 16 y 32 bits son superiores a los de 4 y 8 bits,
la realidad es que los microcontroladores de 8 bits dominan el mercado y los de 4
bits se resisten a desaparecer. La razón de esta tendencia es que los microcontrola-
dores de 4 y 8 bits son apropiados para la gran mayoría de las aplicaciones, lo que
hace absurdo emplear micros más potentes y consecuentemente más caros. Uno de
los sectores que más tira del mercado del microcontrolador es el mercado automo-
vilístico. De hecho, algunas de las familias de microcontroladores actuales se desa-
rrollaron pensando en este sector, siendo modificadas posteriormente para adap-
tarse a sistemas más genéricos. El mercado del automóvil es además uno de los
más exigentes: los componentes
electrónicos deben operar bajo con-
diciones extremas de vibraciones,
choques, ruido, etc. y seguir siendo
fiables. El fallo de cualquier compo-
nente en un automóvil puede ser el
origen de un accidente.
En cuanto a las técnicas de fabri-
cación, cabe decir que prácticamen-
te la totalidad de los microcontrola-
dores actuales se fabrican con tec-
nología CMOS (Complementary
Metal Oxide Semiconductor). Esta
tecnología supera a las técnicas
anteriores por su bajo consumo y
alta inmunidad al ruido.
RECURSOS EN UN SOLO CHIP
Al estar todos los microcontrola-
dores en un solo circuito integrado,
su estructura fundamental y sus
características básicas son muy
parecidas. Todos deben disponer de
Técnico en Electrónica y Microcontroladores 23
Figura 2
Figura 3
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 23
los bloques esenciales Procesador, memoria de datos y de instrucciones, líneas de
E/S, oscilador de reloj y módulos controladores de periféricos. Sin embargo, cada
fabricante intenta enfatizar los recursos más idóneos para las aplicaciones a las que
se destinan preferentemente.
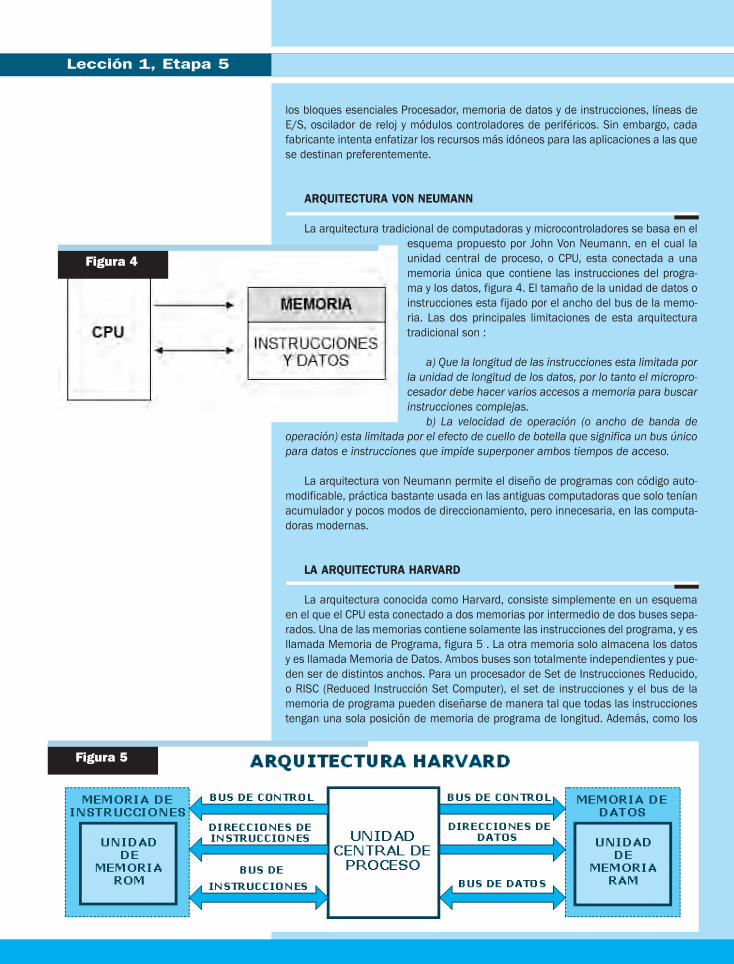
ARQUITECTURA VON NEUMANN
La arquitectura tradicional de computadoras y microcontroladores se basa en el
esquema propuesto por John Von Neumann, en el cual la
unidad central de proceso, o CPU, esta conectada a una
memoria única que contiene las instrucciones del progra-
ma y los datos, figura 4. El tamaño de la unidad de datos o
instrucciones esta fijado por el ancho del bus de la memo-
ria. Las dos principales limitaciones de esta arquitectura
tradicional son :
a) Que la longitud de las instrucciones esta limitada porla unidad de longitud de los datos, por lo tanto el micropro-cesador debe hacer varios accesos a memoria para buscarinstrucciones complejas.
b) La velocidad de operación (o ancho de banda deoperación) esta limitada por el efecto de cuello de botella que significa un bus únicopara datos e instrucciones que impide superponer ambos tiempos de acceso.
La arquitectura von Neumann permite el diseño de programas con código auto-
modificable, práctica bastante usada en las antiguas computadoras que solo tenían
acumulador y pocos modos de direccionamiento, pero innecesaria, en las computa-
doras modernas.
LA ARQUITECTURA HARVARD
La arquitectura conocida como Harvard, consiste simplemente en un esquema
en el que el CPU esta conectado a dos memorias por intermedio de dos buses sepa-
rados. Una de las memorias contiene solamente las instrucciones del programa, y es
llamada Memoria de Programa, figura 5 . La otra memoria solo almacena los datos
y es llamada Memoria de Datos. Ambos buses son totalmente independientes y pue-
den ser de distintos anchos. Para un procesador de Set de Instrucciones Reducido,
o RISC (Reduced Instrucción Set Computer), el set de instrucciones y el bus de la
memoria de programa pueden diseñarse de manera tal que todas las instrucciones
tengan una sola posición de memoria de programa de longitud. Además, como los
Lección 1, Etapa 5
24 Etapa 5
Figura 4
Figura 5
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 24
Teoría
buses son independientes, el CPU puede estar accediendo a los datos para comple-
tar la ejecución de una instrucción, y al mismo tiempo estar leyendo la próxima ins-
trucción a ejecutar. Podemos observar claramente que las principales ventajas de
esta arquitectura son:
a) El tamaño de las instrucciones no esta relacionado con el de los datos, y porlo tanto puede ser optimizado para que cualquier instrucción ocupe una sola posi-ción de memoria de programa, logrando así mayor velocidad y menor longitud deprograma.
b) El tiempo de acceso a las instrucciones puede superponerse con el de losdatos, logrando una mayor velocidad de operación.
Una pequeña desventaja de los procesadores con arquitectura Harvard, es que
deben poseer instrucciones especiales para acceder a tablas de valores constantes
que pueda ser necesario incluir en los programas, ya que estas tablas se encontra-
ran físicamente en la memoria de programa (por ejemplo en la EPROM de un micro-
procesador).
EL PROCESADOR O CPU
Es el elemento más importante del microcontrolador y determina sus principales
características, tanto a nivel hardware como software. Se encarga de direccionar la
memoria de instrucciones, recibir el código OP de la instrucción en curso, su deco-
dificación y la ejecución de la operación que implica la instrucción, así como la bús-
queda de los operandos y el almacenamiento del resultado.
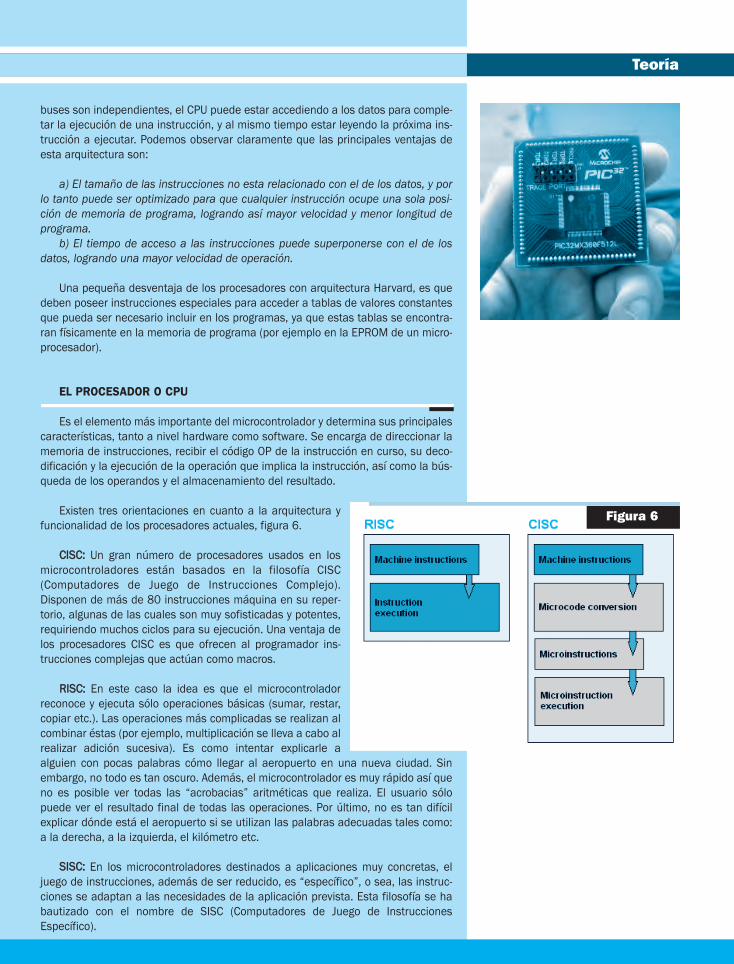
Existen tres orientaciones en cuanto a la arquitectura y
funcionalidad de los procesadores actuales, figura 6.
CISC: Un gran número de procesadores usados en los
microcontroladores están basados en la filosofía CISC
(Computadores de Juego de Instrucciones Complejo).
Disponen de más de 80 instrucciones máquina en su reper-
torio, algunas de las cuales son muy sofisticadas y potentes,
requiriendo muchos ciclos para su ejecución. Una ventaja de
los procesadores CISC es que ofrecen al programador ins-
trucciones complejas que actúan como macros.
RISC: En este caso la idea es que el microcontrolador
reconoce y ejecuta sólo operaciones básicas (sumar, restar,
copiar etc.). Las operaciones más complicadas se realizan al
combinar éstas (por ejemplo, multiplicación se lleva a cabo al
realizar adición sucesiva). Es como intentar explicarle a
alguien con pocas palabras cómo llegar al aeropuerto en una nueva ciudad. Sin
embargo, no todo es tan oscuro. Además, el microcontrolador es muy rápido así que
no es posible ver todas las “acrobacias” aritméticas que realiza. El usuario sólo
puede ver el resultado final de todas las operaciones. Por último, no es tan difícil
explicar dónde está el aeropuerto si se utilizan las palabras adecuadas tales como:
a la derecha, a la izquierda, el kilómetro etc.
SISC: En los microcontroladores destinados a aplicaciones muy concretas, el
juego de instrucciones, además de ser reducido, es “específico”, o sea, las instruc-
ciones se adaptan a las necesidades de la aplicación prevista. Esta filosofía se ha
bautizado con el nombre de SISC (Computadores de Juego de Instrucciones
Específico).
Técnico en Electrónica y Microcontroladores 25
Figura 6
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 25
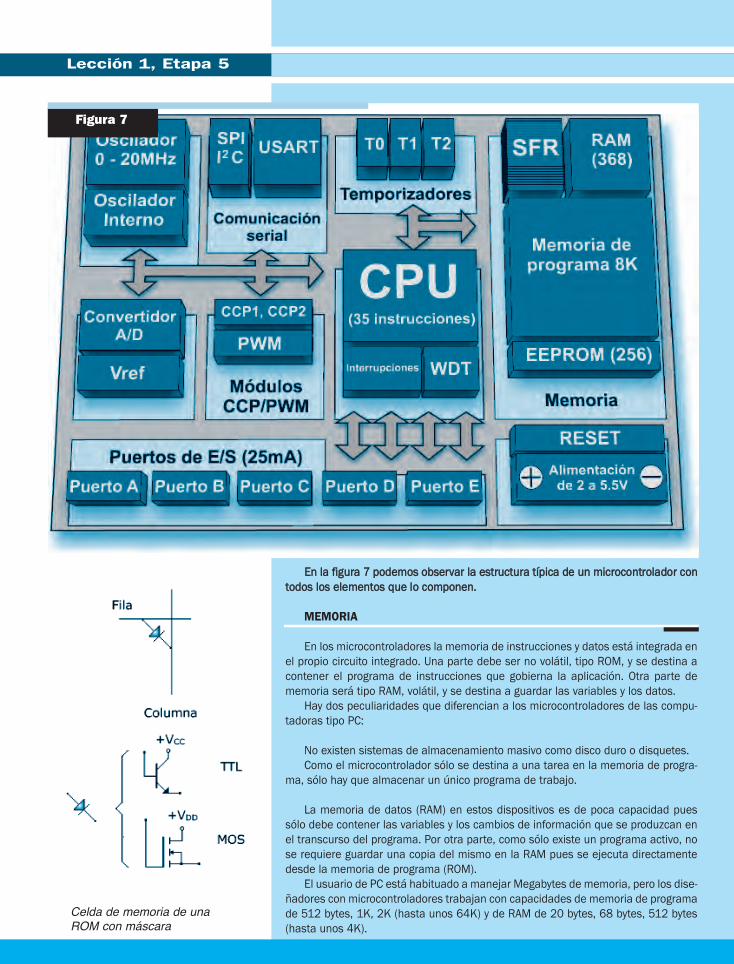
En la figura 7 podemos observar la estructura típica de un microcontrolador con
todos los elementos que lo componen.
MEMORIA
En los microcontroladores la memoria de instrucciones y datos está integrada en
el propio circuito integrado. Una parte debe ser no volátil, tipo ROM, y se destina a
contener el programa de instrucciones que gobierna la aplicación. Otra parte de
memoria será tipo RAM, volátil, y se destina a guardar las variables y los datos.
Hay dos peculiaridades que diferencian a los microcontroladores de las compu-
tadoras tipo PC:
No existen sistemas de almacenamiento masivo como disco duro o disquetes.
Como el microcontrolador sólo se destina a una tarea en la memoria de progra-
ma, sólo hay que almacenar un único programa de trabajo.
La memoria de datos (RAM) en estos dispositivos es de poca capacidad pues
sólo debe contener las variables y los cambios de información que se produzcan en
el transcurso del programa. Por otra parte, como sólo existe un programa activo, no
se requiere guardar una copia del mismo en la RAM pues se ejecuta directamente
desde la memoria de programa (ROM).
El usuario de PC está habituado a manejar Megabytes de memoria, pero los dise-
ñadores con microcontroladores trabajan con capacidades de memoria de programa
de 512 bytes, 1K, 2K (hasta unos 64K) y de RAM de 20 bytes, 68 bytes, 512 bytes
(hasta unos 4K).
Lección 1, Etapa 5
26 Etapa 5
Figura 7
Celda de memoria de unaROM con máscara
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 26
Práctica
Según el tipo de memoria de programa que dispongan los micro-
controladores, la aplicación y utilización de los mismos es diferente. Se
describen las cinco versiones de memoria no volátil que se pueden
encontrar en los microcontroladores del mercado:
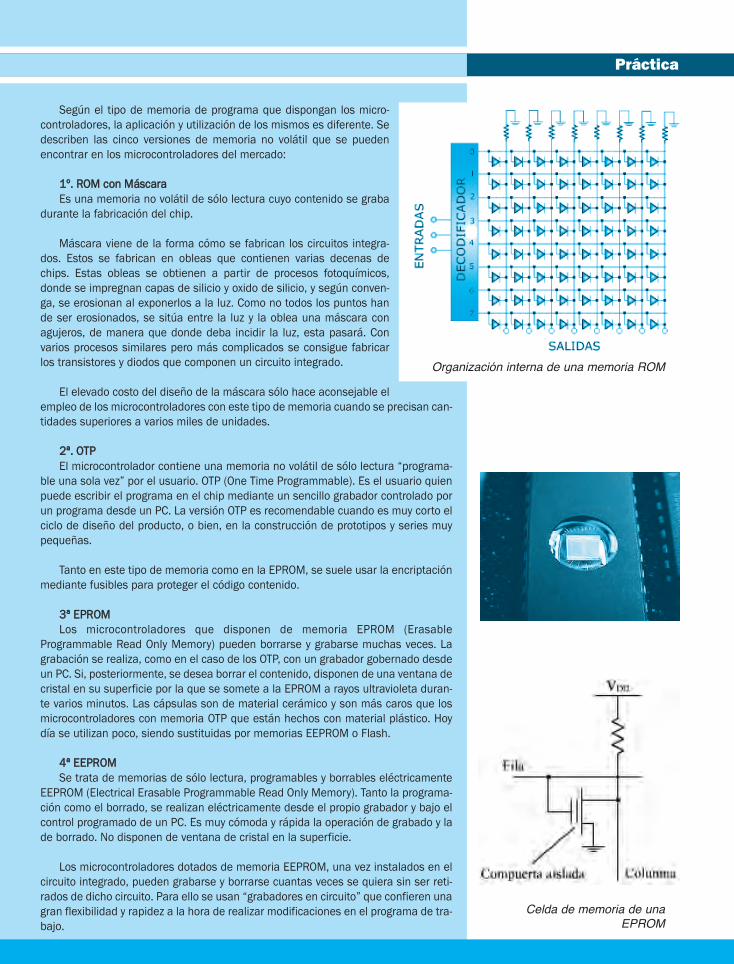
1º. ROM con Máscara
Es una memoria no volátil de sólo lectura cuyo contenido se graba
durante la fabricación del chip.
Máscara viene de la forma cómo se fabrican los circuitos integra-
dos. Estos se fabrican en obleas que contienen varias decenas de
chips. Estas obleas se obtienen a partir de procesos fotoquímicos,
donde se impregnan capas de silicio y oxido de silicio, y según conven-
ga, se erosionan al exponerlos a la luz. Como no todos los puntos han
de ser erosionados, se sitúa entre la luz y la oblea una máscara con
agujeros, de manera que donde deba incidir la luz, esta pasará. Con
varios procesos similares pero más complicados se consigue fabricar
los transistores y diodos que componen un circuito integrado.
El elevado costo del diseño de la máscara sólo hace aconsejable el
empleo de los microcontroladores con este tipo de memoria cuando se precisan can-
tidades superiores a varios miles de unidades.
2ª. OTP
El microcontrolador contiene una memoria no volátil de sólo lectura “programa-
ble una sola vez” por el usuario. OTP (One Time Programmable). Es el usuario quien
puede escribir el programa en el chip mediante un sencillo grabador controlado por
un programa desde un PC. La versión OTP es recomendable cuando es muy corto el
ciclo de diseño del producto, o bien, en la construcción de prototipos y series muy
pequeñas.
Tanto en este tipo de memoria como en la EPROM, se suele usar la encriptación
mediante fusibles para proteger el código contenido.
3ª EPROM
Los microcontroladores que disponen de memoria EPROM (Erasable
Programmable Read OnIy Memory) pueden borrarse y grabarse muchas veces. La
grabación se realiza, como en el caso de los OTP, con un grabador gobernado desde
un PC. Si, posteriormente, se desea borrar el contenido, disponen de una ventana de
cristal en su superficie por la que se somete a la EPROM a rayos ultravioleta duran-
te varios minutos. Las cápsulas son de material cerámico y son más caros que los
microcontroladores con memoria OTP que están hechos con material plástico. Hoy
día se utilizan poco, siendo sustituidas por memorias EEPROM o Flash.
4ª EEPROM
Se trata de memorias de sólo lectura, programables y borrables eléctricamente
EEPROM (Electrical Erasable Programmable Read OnIy Memory). Tanto la programa-
ción como el borrado, se realizan eléctricamente desde el propio grabador y bajo el
control programado de un PC. Es muy cómoda y rápida la operación de grabado y la
de borrado. No disponen de ventana de cristal en la superficie.
Los microcontroladores dotados de memoria EEPROM, una vez instalados en el
circuito integrado, pueden grabarse y borrarse cuantas veces se quiera sin ser reti-
rados de dicho circuito. Para ello se usan “grabadores en circuito” que confieren una
gran flexibilidad y rapidez a la hora de realizar modificaciones en el programa de tra-
bajo.
Técnico en Electrónica y Microcontroladores 27
Organización interna de una memoria ROM
Celda de memoria de unaEPROM
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 27
El número de veces que puede grabarse y borrarse una memoria EEPROM es fini-
to, por lo que no es recomendable una reprogramación continua. Hoy día están sien-
do sustituidas por memorias de tipo Flash.
Se va extendiendo en los fabricantes la tendencia de incluir una pequeña zona
de memoria EEPROM en los circuitos programables para guardar y modificar cómo-
damente una serie de parámetros que adecuan el dispositivo a las condiciones del
entorno. Este tipo de memoria es relativamente lenta.
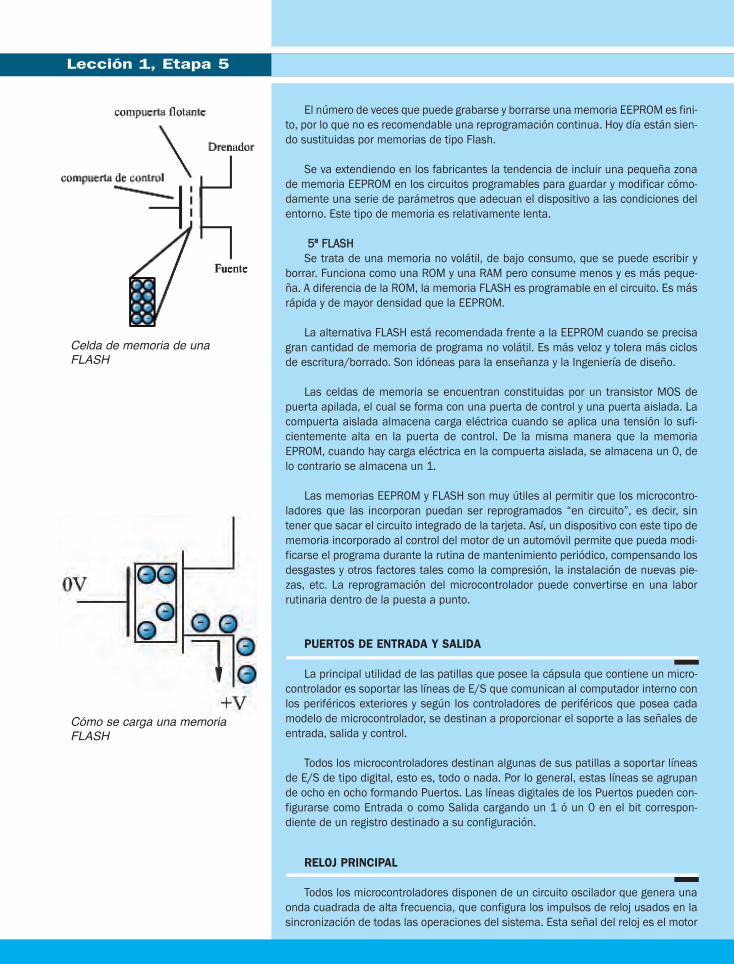
5ª FLASH
Se trata de una memoria no volátil, de bajo consumo, que se puede escribir y
borrar. Funciona como una ROM y una RAM pero consume menos y es más peque-
ña. A diferencia de la ROM, la memoria FLASH es programable en el circuito. Es más
rápida y de mayor densidad que la EEPROM.
La alternativa FLASH está recomendada frente a la EEPROM cuando se precisa
gran cantidad de memoria de programa no volátil. Es más veloz y tolera más ciclos
de escritura/borrado. Son idóneas para la enseñanza y la Ingeniería de diseño.
Las celdas de memoria se encuentran constituidas por un transistor MOS de
puerta apilada, el cual se forma con una puerta de control y una puerta aislada. La
compuerta aislada almacena carga eléctrica cuando se aplica una tensión lo sufi-
cientemente alta en la puerta de control. De la misma manera que la memoria
EPROM, cuando hay carga eléctrica en la compuerta aislada, se almacena un 0, de
lo contrario se almacena un 1.
Las memorias EEPROM y FLASH son muy útiles al permitir que los microcontro-
ladores que las incorporan puedan ser reprogramados “en circuito”, es decir, sin
tener que sacar el circuito integrado de la tarjeta. Así, un dispositivo con este tipo de
memoria incorporado al control del motor de un automóvil permite que pueda modi-
ficarse el programa durante la rutina de mantenimiento periódico, compensando los
desgastes y otros factores tales como la compresión, la instalación de nuevas pie-
zas, etc. La reprogramación del microcontrolador puede convertirse en una labor
rutinaria dentro de la puesta a punto.
PUERTOS DE ENTRADA Y SALIDA
La principal utilidad de las patillas que posee la cápsula que contiene un micro-
controlador es soportar las líneas de E/S que comunican al computador interno con
los periféricos exteriores y según los controladores de periféricos que posea cada
modelo de microcontrolador, se destinan a proporcionar el soporte a las señales de
entrada, salida y control.
Todos los microcontroladores destinan algunas de sus patillas a soportar líneas
de E/S de tipo digital, esto es, todo o nada. Por lo general, estas líneas se agrupan
de ocho en ocho formando Puertos. Las líneas digitales de los Puertos pueden con-
figurarse como Entrada o como Salida cargando un 1 ó un 0 en el bit correspon-
diente de un registro destinado a su configuración.
RELOJ PRINCIPAL
Todos los microcontroladores disponen de un circuito oscilador que genera una
onda cuadrada de alta frecuencia, que configura los impulsos de reloj usados en la
sincronización de todas las operaciones del sistema. Esta señal del reloj es el motor
Lección 1, Etapa 5
28 Etapa 5
Celda de memoria de unaFLASH
Cómo se carga una memoriaFLASH
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 28
Práctica
del sistema y la que hace que el programa y los contadores avancen. Generalmente,
el circuito de reloj está incorporado en el microcontrolador y sólo se necesitan unos
pocos componentes exteriores para seleccionar y estabilizar la frecuencia de traba-
jo. Dichos componentes suelen consistir en un cristal de cuarzo junto a elementos
pasivos o bien un resonador cerámico o una red R-C.
Aumentar la frecuencia de reloj supone disminuir el tiempo en que se ejecutan
las instrucciones pero lleva aparejado un incremento del consumo de energía y de
calor generado.
RECURSOS ESPECIALES
Cada fabricante oferta numerosas versiones de una arquitectura básica de
microcontrolador. En algunas amplía las capacidades de las memorias, en otras
incorpora nuevos recursos, en otras reduce las prestaciones al mínimo para aplica-
ciones muy simples, etc. La labor del diseñador es encontrar el modelo mínimo que
satisfaga todos los requerimientos de su aplicación. De esta forma, minimizará el
costo, el hardware y el software.
Los principales recursos específicos que incorporan los microcontroladores son:
Temporizadores o “Timers”.Perro guardián o “Watchdog”.Protección ante fallo de alimentación o “Brownout”.Estado de reposo o de bajo consumo.Conversor A/D.Conversor D/A.Comparador analógico.Modulador de anchura de impulsos o PWM.Puertos de comunicación.
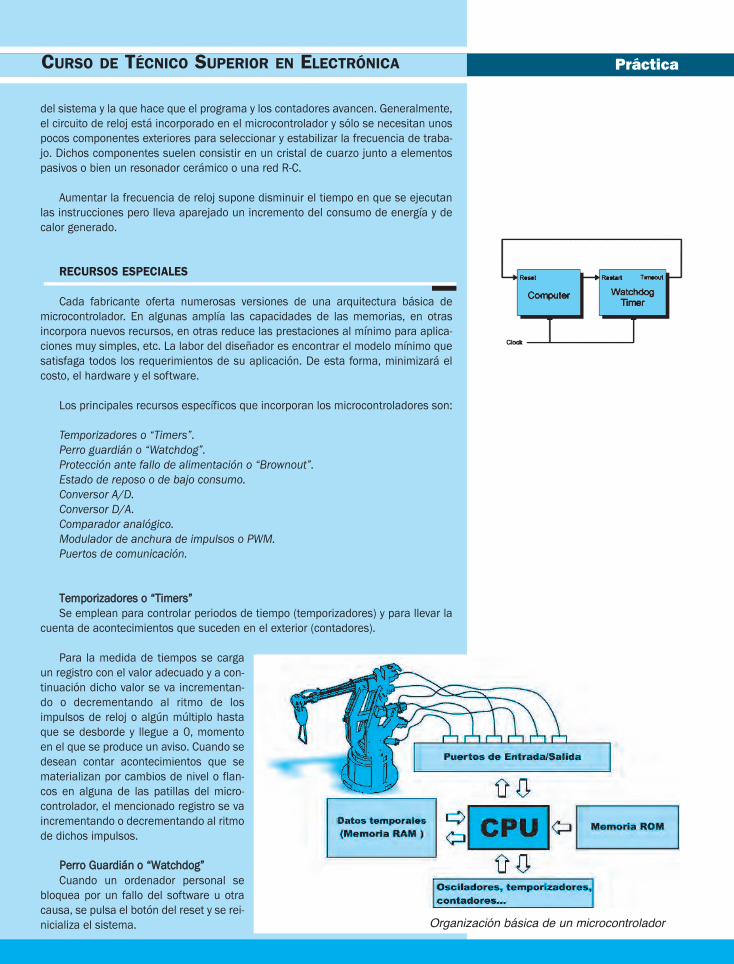
Temporizadores o “Timers”
Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la
cuenta de acontecimientos que suceden en el exterior (contadores).
Para la medida de tiempos se carga
un registro con el valor adecuado y a con-
tinuación dicho valor se va incrementan-
do o decrementando al ritmo de los
impulsos de reloj o algún múltiplo hasta
que se desborde y llegue a 0, momento
en el que se produce un aviso. Cuando se
desean contar acontecimientos que se
materializan por cambios de nivel o flan-
cos en alguna de las patillas del micro-
controlador, el mencionado registro se va
incrementando o decrementando al ritmo
de dichos impulsos.
Perro Guardián o “Watchdog”
Cuando un ordenador personal se
bloquea por un fallo del software u otra
causa, se pulsa el botón del reset y se rei-
nicializa el sistema.
Técnico en Electrónica y Microcontroladores 29
CURSO DE TÉCNICO SUPERIOR EN ELECTRÓNICA
Organización básica de un microcontrolador
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 29

En la mayoría de los casos y a diferencia de un ordenador per-
sonal, un microcontrolador funciona sin el control de un supervisor
y de forma continuada las 24 horas del día y 365 días al año. El
Perro guardián consiste en un temporizador que, cuando se des-
borda y pasa por 0, provoca un reset automáticamente en el siste-
ma.
Se debe diseñar el programa de trabajo que controla la tarea de
forma que refresque o inicialice al Perro guardián antes de que pro-
voque el reset. Si falla el programa o se bloquea, el programa no
refrescará al Perro guardián y, al completar su temporización, pro-
vocará el reset del sistema.
Protección Ante Fallo de Alimentación o “Brownout”
Se trata de un circuito que resetea al microcontrolador cuando
el voltaje de alimentación (VDD) es inferior a un voltaje mínimo
(“brownout”). Mientras el voltaje de alimentación sea inferior al de
brownout el dispositivo se mantiene reseteado, comenzando a funcionar normal-
mente cuando sobrepasa dicho valor. Esto es muy útil para evitar datos erróneos por
transiciones y ruidos en la línea de alimentación.
Estado de Reposo ó de Bajo Consumo
Son abundantes las situaciones reales de trabajo en que el microcontrolador
debe esperar, sin hacer nada, a que se produzca algún acontecimiento externo que
lo ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los apa-
ratos portátiles), los microcontroladores disponen de una instrucción especial
(SLEEP), que los pasa al estado de reposo o de bajo consumo, en el cual los reque-
rimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se
“congelan” sus circuitos asociados, quedando sumido en un profundo “sueño” el
microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento
esperado, el microcontrolador se despierta y reanuda su trabajo. Para hacernos una
idea, esta función es parecida a la opción de Suspender en el menú para apagar el
equipo (en aquellos PCs con administración avanzada de energía).
Conversor A/D (CAD)
Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital)
pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen
disponer de un multiplexor que permite aplicar a la entrada del CAD diversas seña-
les analógicas desde las patillas del circuito integrado.
Conversor D/A (CDA)
Transforma los datos digitales obtenidos del procesamiento del computador en
su correspondiente señal analógica que saca al exterior por una de las patillas de la
cápsula. Existen muchos dispositivos de salida que trabajan con señales analógicas.
Comparador Analógico
Algunos modelos de microcontroladores disponen internamente de un
Amplificador Operacional que actúa como comparador entre una señal fija de refe-
rencia y otra variable que se aplica por una de las patillas de la cápsula. La salida
del comparador proporciona un nivel lógico 1 ó 0 según una señal sea mayor o
menor que la otra.
También hay modelos de microcontroladores con un módulo de tensión de refe-
rencia que proporciona diversas tensiones de referencia que se pueden aplicar en
los comparadores.
Modulador de Ancho de Pulsos o PWM
Son circuitos que proporcionan en su salida impulsos de anchura variable, que
Lección 1, Etapa 5
30 Etapa 5
Reset por caida de tensión
Circuito típico de activaciónde estado de reposo
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 30
Práctica
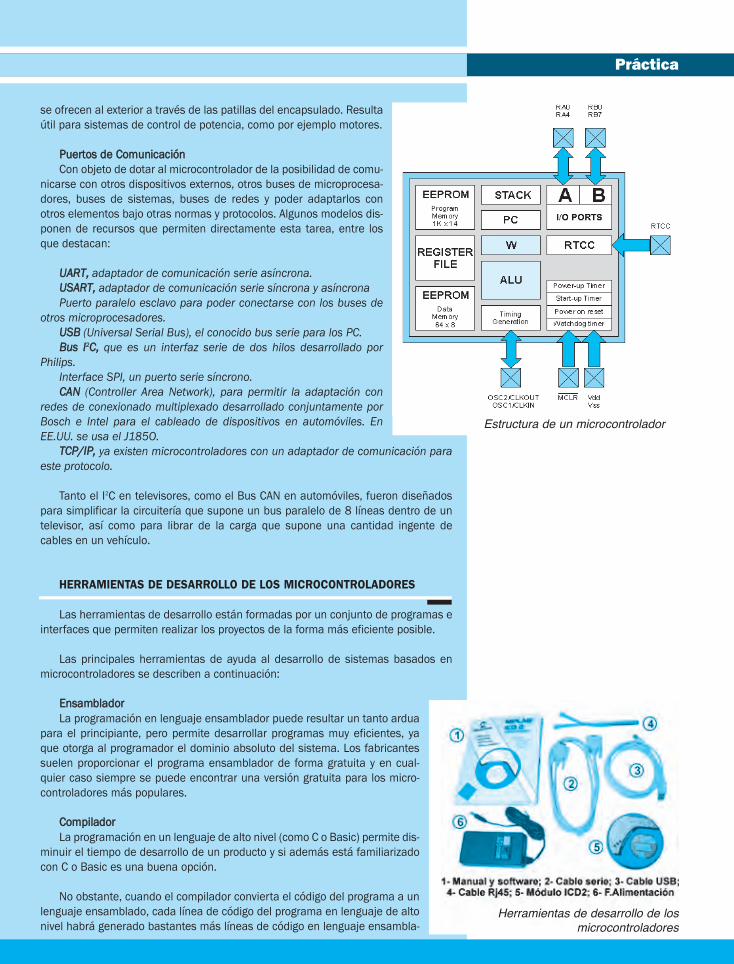
se ofrecen al exterior a través de las patillas del encapsulado. Resulta
útil para sistemas de control de potencia, como por ejemplo motores.
Puertos de Comunicación
Con objeto de dotar al microcontrolador de la posibilidad de comu-
nicarse con otros dispositivos externos, otros buses de microprocesa-
dores, buses de sistemas, buses de redes y poder adaptarlos con
otros elementos bajo otras normas y protocolos. Algunos modelos dis-
ponen de recursos que permiten directamente esta tarea, entre los
que destacan:
UART, adaptador de comunicación serie asíncrona.USART, adaptador de comunicación serie síncrona y asíncronaPuerto paralelo esclavo para poder conectarse con los buses de
otros microprocesadores.USB (Universal Serial Bus), el conocido bus serie para los PC.Bus I2C, que es un interfaz serie de dos hilos desarrollado por
Philips.Interface SPI, un puerto serie síncrono.CAN (Controller Area Network), para permitir la adaptación con
redes de conexionado multiplexado desarrollado conjuntamente porBosch e Intel para el cableado de dispositivos en automóviles. EnEE.UU. se usa el J185O.
TCP/IP, ya existen microcontroladores con un adaptador de comunicación paraeste protocolo.
Tanto el I2C en televisores, como el Bus CAN en automóviles, fueron diseñados
para simplificar la circuitería que supone un bus paralelo de 8 líneas dentro de un
televisor, así como para librar de la carga que supone una cantidad ingente de
cables en un vehículo.
HERRAMIENTAS DE DESARROLLO DE LOS MICROCONTROLADORES
Las herramientas de desarrollo están formadas por un conjunto de programas e
interfaces que permiten realizar los proyectos de la forma más eficiente posible.
Las principales herramientas de ayuda al desarrollo de sistemas basados en
microcontroladores se describen a continuación:
Ensamblador
La programación en lenguaje ensamblador puede resultar un tanto ardua
para el principiante, pero permite desarrollar programas muy eficientes, ya
que otorga al programador el dominio absoluto del sistema. Los fabricantes
suelen proporcionar el programa ensamblador de forma gratuita y en cual-
quier caso siempre se puede encontrar una versión gratuita para los micro-
controladores más populares.
Compilador
La programación en un lenguaje de alto nivel (como C o Basic) permite dis-
minuir el tiempo de desarrollo de un producto y si además está familiarizado
con C o Basic es una buena opción.
No obstante, cuando el compilador convierta el código del programa a un
lenguaje ensamblado, cada línea de código del programa en lenguaje de alto
nivel habrá generado bastantes más líneas de código en lenguaje ensambla-
Técnico en Electrónica y Microcontroladores 31
Estructura de un microcontrolador
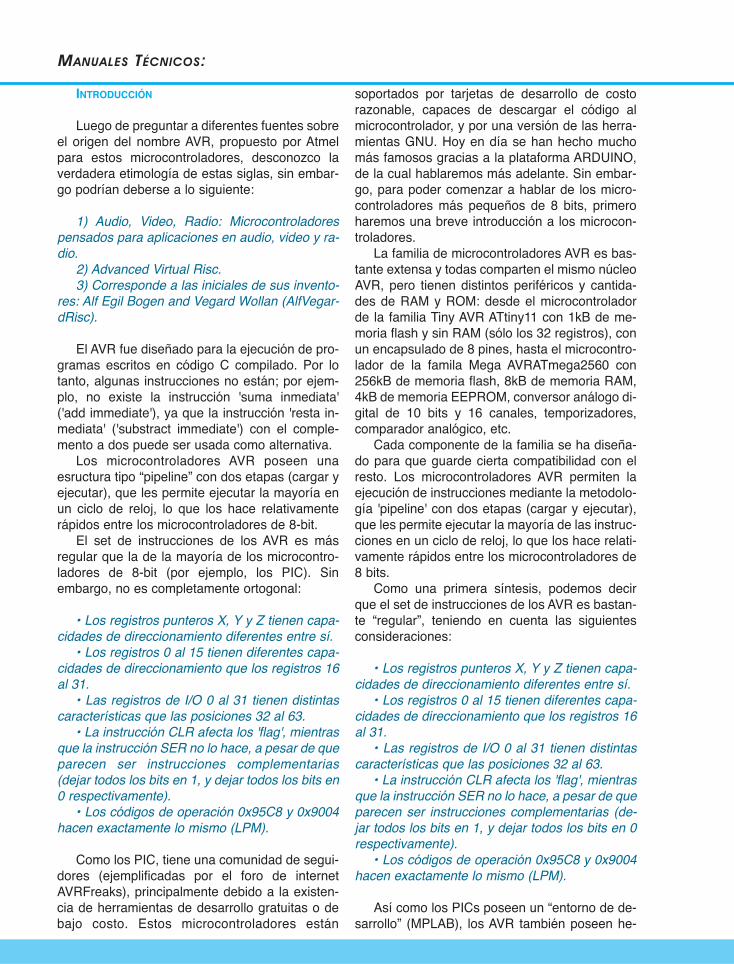
Herramientas de desarrollo de losmicrocontroladores
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 31
dor, normalmente en una relación de uno a tres. Esto
significa que para utilizar un lenguaje de alto nivel
necesitaremos un microcontrolador con una capaci-
dad de memoria relativamente grande.
Si el programa que estamos desarrollando necesi-
ta utilizar números con decimales, o con notación
científica o se utilizan operaciones complejas, como
pueden ser las trigonométricas, es casi obligado utili-
zar un lenguaje de alto nivel. Pero si lo que se va a
hacer es manipular bits en registros, entradas, salidas
y cálculos sencillos, el lenguaje ensamblado es la
mejor opción.
Las versiones más potentes de compiladores sue-
len ser muy caras, aunque para los microcontrolado-
res más populares pueden encontrarse versiones
demo limitadas e incluso compiladores gratuitos.
Como compilador gratuito puede utilizarse el compilador C GNU, que es un com-
pilador C de código abierto tan bueno como los compiladores C comerciales pero
que sin embargo tiene un proceso de instalación que no es sencillo. Además hay que
comprobar que arquitecturas de microcontrolador soporta. Algunas de las cuales
son MSP430 de TI, AVR de Atmel y HC11 de Motorola, (ver www.gnu.org y
www.fsf.org). También puede conseguirse un compilador C GNU en binario ya cons-
truido. Por ejemplo para la arquitectura ARM puede conseguirse un compilador C
GNU binario para win32 desde www.gnuarm.com, que trabaja con línea de coman-
dos e incluye un depurador de código. Para obtener un entorno de desarrollo (IDE)
para windows que pueda utilizarse con el conjunto de herramientas GNU puede uti-
lizarse la aplicación VIDE, que puede conseguirse en www.objectcentral.
com/vide.htm.
Simulador
Se trata de software que es capaz de ejecutar en un PC programas realizados
para el microcontrolador. Los simuladores permiten tener un control absoluto sobre
la ejecución de un programa, siendo ideales para la depuración de los mismos. Su
gran inconveniente es que es difícil simular la entrada y salida de datos del micro-
controlador. Tampoco cuentan con los posibles ruidos en las entradas, pero, al
menos, permiten el paso físico de la implementación de un modo más seguro y
menos costoso, puesto que ahorraremos en grabaciones de chips para la prueba in-
situ.
Placas de Evaluación
Se trata de pequeños sistemas con un microcontrolador ya montado y que sue-
len conectarse a un PC desde el que se cargan los programas que se ejecutan en el
microcontrolador. Las placas suelen incluir visualizadores LCD, teclados, LEDs, fácil
acceso a los pines de E/S, etc. Pueden incluir un programa de control o sistema ope-
rativo que recibe el nombre de programa monitor. El programa monitor de algunas
placas de evaluación, aparte de permitir cargar programas y datos en la memoria del
microcontrolador, puede permitir en cualquier momento realizar ejecución paso a
paso, monitorizar el estado del microcontrolador o modificar los valores almacena-
dos los registros o en la memoria.
Por motivos de espacio, debemos terminar el tema aquí, sin embargo aclaramosque en el CD correspondiente a esta lección encontrará la información completatanto de la sección Teoría como de las secciones Práctica y Taller. J
Lección 1, Etapa 5
32 Etapa 5
Placa de entrenamiento paraaprender microcontroladores
Tec Sup E5 L1.qxd:LECC 1 .qxd 23/02/14 13:10 Page 32
Microcontroladores Atmel
Microcontroladores 33
Generalidades y CaraCterístiCas de los
MiCroControladores atMelLos AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los
AVR fue concebida por dos estudiantes en el “Norwegian Institute of Technology” y, pos-
teriormente, refinada y desarrollada en Atmel Norway, empresa subsidiaria de Atmel, fun-
dada por los dos arquitectos del chip. El AVR es un microcontrolador (CPU) de arqui-
tectura Harvard con 32 registros de 8 bits. Algunas instrucciones sólo operan en un sub-
conjunto de estos registros. La concatenación de los 32 registros, los registros de entra-
da/salida y la memoria de datos conforman un espacio de direcciones unificado, al cual
se accede a través de operaciones de carga/almacenamiento. A diferencia de los micro-
controladores PIC, el stack se ubica en este espacio de memoria unificado, y no está
limitado a un tamaño fijo. El AVR fue diseñado desde un comienzo para la ejecución efi-
ciente de código C compilado. Por lo tanto, algunas instrucciones tales como 'suma
inmediata' ('add immediate' en inglés) no están incluidas, ya que puede usarse la ins-
trucción 'resta inmediata' ('substract immediate' en inglés) con el complemento dos
como una alternativa. El set de instrucciones AVR está implementado físicamente y dis-
ponible en el mercado en diferentes dispositivos, que comparten el mismo núcleo AVR
pero tienen distintos periféricos y cantidades de RAM y ROM: desde el microcontrolador
de la familia Tiny AVR ATtiny11 con 1kB de memoria flash y sin RAM (sólo los 32 regis-
tros), y 8 pines, pasando por el microcontrolador de la familia Mega AVRATmega2560
con 256kB de memoria flash, 8kB de memoria RAM, 4kB de memoria EEPROM, conver-
sor análogo digital de 10 bits y 16 canales, temporizadores, comparador analógico,
JTAG, etc. Hay una gran compatibilidad entre los diferentes modelos.
Coordinación: Ing. Horacio Daniel Vallejo - [email protected]
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page33
MAnuAles Técnicos:
IntroDuCCIón
Luegodepreguntaradiferentesfuentessobreel origen del nombreAVR, propuesto porAtmelpara estos microcontroladores, desconozco laverdaderaetimologíadeestassiglas,sinembar-gopodríandebersealosiguiente:
1) Au dio, Vi deo, Ra dio: Mi cro con tro la do res
pen sa dos pa ra apli ca cio nes en au dio, vi deo y ra -
dio.
2) Ad van ced Vir tual Risc.
3) Co rres pon de a las ini cia les de sus in ven to -
res: Alf Egil Bo gen and Ve gard Wo llan (Alf Ve gar -
dRisc).
ElAVRfuediseñadoparalaejecucióndepro-gramas escritos en código C compilado. Por lotanto,algunasinstruccionesnoestán;porejem-plo, no existe la instrucción 'suma inmediata'('addimmediate'),yaquelainstrucción'restain-mediata' ('substract immediate') con el comple-mentoadospuedeserusadacomoalternativa.Los microcontroladores AVR poseen una
esructuratipo“pipeline”condosetapas(cargaryejecutar),quelespermiteejecutarlamayoríaenun ciclo de reloj, lo que los hace relativamenterápidosentrelosmicrocontroladoresde8-bit.El set de instrucciones de los AVR es más
regularqueladelamayoríadelosmicrocontro-ladores de 8-bit (por ejemplo, los PIC). Sinembargo,noescompletamenteortogonal:
• Los registros punteros X, Y y Z tienen capa-
cidades de direccionamiento diferentes entre sí.
• Los registros 0 al 15 tienen diferentes capa-
cidades de direccionamiento que los registros 16
al 31.
• Las registros de I/O 0 al 31 tienen distintas
características que las posiciones 32 al 63.
• La instrucción CLR afecta los 'flag', mientras
que la instrucción SER no lo hace, a pesar de que
parecen ser instrucciones complementarias
(dejar todos los bits en 1, y dejar todos los bits en
0 respectivamente).
• Los códigos de operación 0x95C8 y 0x9004
hacen exactamente lo mismo (LPM).
ComolosPIC,tieneunacomunidaddesegui-dores (ejemplificadas por el foro de internetAVRFreaks),principalmentedebidoa laexisten-ciadeherramientasdedesarrollogratuitasodebajo costo. Estos microcontroladores están
soportados por tarjetas de desarrollo de costorazonable, capaces de descargar el código almicrocontrolador,yporunaversióndelasherra-mientasGNU.HoyendíasehanhechomuchomásfamososgraciasalaplataformaARDUINO,delacualhablaremosmásadelante.Sinembar-go,parapodercomenzarahablarde losmicro-controladoresmás pequeños de 8 bits, primeroharemosunabreveintroducciónalosmicrocon-troladores.LafamiliademicrocontroladoresAVResbas-
tanteextensaytodascompartenelmismonúcleoAVR, pero tienendistintos periféricos y cantida-desdeRAMyROM:desdeelmicrocontroladorde la familiaTinyAVRATtiny11con1kBdeme-moriaflashysinRAM(sólolos32registros),conunencapsuladode8pines,hastaelmicrocontro-lador de la famila Mega AVRATmega2560 con256kBdememoriaflash,8kBdememoriaRAM,4kBdememoriaEEPROM,conversoranálogodi-gital de 10 bits y 16 canales, temporizadores,comparadoranalógico,etc.Cadacomponentedelafamiliasehadiseña-
doparaqueguardeciertacompatibilidadconelresto. Los microcontroladores AVR permiten laejecucióndeinstruccionesmediantelametodolo-gía 'pipeline'condosetapas(cargaryejecutar),quelespermiteejecutarlamayoríadelasinstruc-cionesenunciclodereloj,loqueloshacerelati-vamenterápidosentrelosmicrocontroladoresde8bits.Como una primera síntesis, podemos decir
queelsetdeinstruccionesdelosAVResbastan-te “regular”, teniendo en cuenta las siguientesconsideraciones:
• Los re gis tros pun te ros X, Y y Z tie nen ca pa -
ci da des de di rec cio na mien to di fe ren tes en tre sí.
• Los re gis tros 0 al 15 tie nen di fe ren tes ca pa -
ci da des de di rec cio na mien to que los re gis tros 16
al 31.
• Las re gis tros de I/O 0 al 31 tie nen dis tin tas
ca rac te rís ti cas que las po si cio nes 32 al 63.
• La ins truc ción CLR afec ta los 'flag', mien tras
que la ins truc ción SER no lo ha ce, a pe sar de que
pa re cen ser ins truc cio nes com ple men ta rias (de -
jar to dos los bits en 1, y de jar to dos los bits en 0
res pec ti va men te).
• Los có di gos de ope ra ción 0x95C8 y 0x9004
ha cen exac ta men te lo mis mo (LPM).
AsícomolosPICsposeenun“entornodede-sarrollo” (MPLAB), losAVR tambiénposeenhe-
34 Microcontroladores
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page34
GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
rramientasdedesarrollogratuitasodebajocos-tocapacesdedescargarelcódigoalmicrocontro-ladorutilizandounaversiónde lasherramientasdelicencialibreGNU.Ahorabien,comoesprobablequeesteartícu-
lo esté siendo leído por estudiantes y/o princi-piantes,vamosadarunabreveintroducciónqueexpliquequéesunmicrocontroladoryparaquése loemplea.Paraestepropósitoemplearemosdefiniciones realizadasporEmilioTobosoensupágina www .per so .wa na doo.e s/e mi lio to bo so.Cabeaclararqueenellibro“PICparaEstudian-tes”,deEditorialQuark,Ud,puedeencontrarbi-bliografíaextensasobreeltemayqueenlapági-nadelSr.Tobosotambiénpodráencontrarabun-dante informaciónorientadaalosmicrocontrola-doresPICs,
In tro DuC CIón a los MI Cro Con tro la Do res
Desdelainvencióndelossemiconductores,eldesarrollodelatecnologíadigitalhadadolugaradispositivos cada vezmás complejos y rápidos.Entreelloslosmicroprocesadoresylosmicrocon-troladores.Losmicrocontroladoresseencuentranennuestrotrabajo,ennuestracasayennuestravida.Controlanelfuncionamientodelostecladosdelascomputadoras,estánenlosteléfonoscelu-lares,enloshornosdemicroondasy,engeneral,entodoaparatoelectrónicoqueposeaungradodeautomatismo.Sedicequeuncontroladoresundispositivo
queseempleaparamanejarunoovariosproce-sos.Porejemplo,paravertelevisión,uncontrola-dorevalúalaseñalqueingresaporlaantenaylaprocesaparaquealapantallayelparlantellegueconelmismonivelpromedio,sinimportarelnivelde laseñal ingresante,siemprequeestédentrode determinados parámetros. Hasta hace unos35 años, los controladores se construían concomponentes electrónicos de lógica discreta;posteriormente se emplearon losmicroprocesa-dores,apoyadosconchipsdememoriaydisposi-tivosdeE/Ssobreunatarjetadecircuitoimpreso.Desdecomienzosdelos90todosloselementosdelcontroladorsehanpodido incluirenunsolocircuitointegrado,elcualrecibeelnombredemi-crocontrolador.Esdecir, unmicrocontroladoresunchipqueposeeensuinterioraunmicroproce-sador,memoriadeprograma,memoriadedatosypuertosparacomunicarseconelexterior.Unmicrocontrolador es un circuito integrado
de alta escala de integración que incorpora lamayorpartedeloselementosqueconfiguranuncontroladoryquecontienetodosloscomponen-tesfundamentalesdeunordenador,aunquedeli-mitadas prestaciones y que se suele destinar agobernarunasolatarea.En lamemoriadeprogramadeberesidirun
conjuntodesentencias(programa)quecontrolanelfuncionamientodeunatareadeterminada,suslíneasdeentrada/salidaseconectanalossenso-resyactuadoresdeldispositivoacontrolary,de-bidoasupequeñotamaño,sueleirintegradoenelpropiodispositivoalqueautomatiza.Según lodicho,unmicrocontroladordispone
normalmentedelossiguientescomponentes:
• Pro ce sa dor o CPU (Uni dad Cen tral de Pro -
ce so).
• Me mo ria RAM pa ra con te ner los da tos.
• Me mo ria pa ra el pro gra ma ti po RO M/E PRO -
M/EE PROM /Flash.
• Lí neas de E/S pa ra co mu ni car se con el ex -
te rior.
Tambiénpuedeposeerotrosbloquesdeapo-yoqueflexibilizanaúnmássuuso,talescomo:
• Mó du los pa ra el con trol de pe ri fé ri cos: tem -
po ri za do res, puer tos se rie y pa ra le lo, CAD: Con -
ver so res Ana ló gi co /Di gi tal, CDA: Con ver so res Di -
gi ta l/A na ló gi co, etc.
• Ge ne ra dor de im pul sos de re loj que sin cro -
ni zan el fun cio na mien to de to do el sis te ma.
• Sis te mas de pro tec ción de so bre co rrien te o
cor to cir cui to.
Cadafabricantedemicrocontroladoresofertaunelevadonúmerodemodelosdiferentes,desdelosmás sencillos hasta losmás poderosos. Sepuedeseleccionarlacapacidaddelasmemorias,elnúmerodelíneasdeE/S,lacantidadypoten-cia de los elementos auxiliares, la velocidaddefuncionamiento, etc. Por todo ello, un aspectomuyimportantedeldiseñodeunsistemamicro-controladoeslaseleccióndelmicrocontroladorautilizar.Una aplicación típica podría emplear varios
microcontroladoresparacontrolarpequeñaspar-tesdelsistema.Estospequeñoscontroladorespodríancomu-
nicarseentreellosyconunprocesadorcentral,probablementemáspotente,paracompartirlain-formaciónycoordinarsusaccionescomo,dehe-
Microcontroladores 3 5
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page35
MAnuAles Técnicos:
cho,ocurreyahabitualmenteencualquierPC.Al-gunas aplicaciones de los microcontroladoresson:
• En sis te mas de co mu ni ca ción: cen tra les te le fó -
ni cas, trans mi so res, re cep to res, té le fo nos fi jos, ce lu -
la res, fax, etc.
• En elec tro do més ti cos: la va rro pas, hor nos de mi -
croon das, he la de ras, la va va ji llas, te le vi so res, re pro -
duc to res de DVD, mi ni com po nen tes, con tro les re mo -
tos, etc.
• In dus tria in for má ti ca: Se en cuen tran en ca si to -
dos los pe ri fé ri cos; ra to nes, te cla dos, im pre so ras, es -
cá ner, etc.
• Do mó ti ca: sis te mas de alar ma y se gu ri dad, con -
trol de pro ce sos ho ga re ños a dis tan cia, etc.
• Au to ma ción: cli ma ti za ción, se gu ri dad, ABS, etc.
• In dus tria: Au tó ma tas, con trol de pro ce sos, etc.
• Otros: Ins tru men ta ción, elec tro me di ci na, as cen -
so res, ca le fac ción, ai re acon di cio na do, sis te mas de
na ve ga ción, etc.
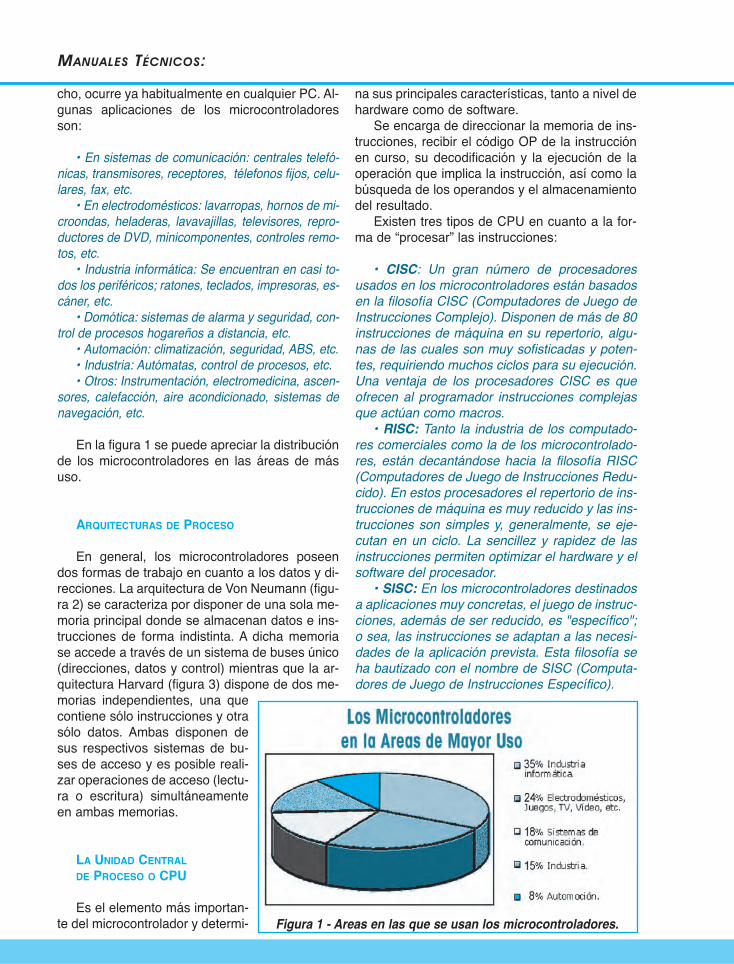
Enlafigura1sepuedeapreciarladistribuciónde losmicrocontroladores en las áreas demásuso.
ar quI teC tu ras De Pro Ce so
En general, los microcontroladores poseendosformasdetrabajoencuantoalosdatosydi-recciones.LaarquitecturadeVonNeumann(figu-ra2)secaracterizapordisponerdeunasolame-moriaprincipaldondesealmacenandatoseins-trucciones de forma indistinta.A dichamemoriaseaccedeatravésdeunsistemadebusesúnico(direcciones,datosycontrol)mientrasquelaar-quitecturaHarvard(figura3)disponededosme-morias independientes, una quecontienesóloinstruccionesyotrasólo datos. Ambas disponen desus respectivos sistemas de bu-sesdeaccesoyesposiblereali-zaroperacionesdeacceso(lectu-ra o escritura) simultáneamenteenambasmemorias.
la unI DaD Cen tral
De Pro Ce so o CPu
Eselelementomásimportan-tedelmicrocontroladorydetermi-
nasusprincipalescaracterísticas,tantoaniveldehardwarecomodesoftware.Seencargadedireccionarlamemoriadeins-
trucciones,recibirelcódigoOPdelainstrucciónencurso, sudecodificacióny laejecuciónde laoperaciónqueimplicalainstrucción,asícomolabúsquedadelosoperandosyelalmacenamientodelresultado.ExistentrestiposdeCPUencuantoalafor-
made“procesar”lasinstrucciones:
• CISC: Un gran nú me ro de pro ce sa do res
usa dos en los mi cro con tro la do res es tán ba sa dos
en la fi lo so fía CISC (Com pu ta do res de Jue go de
Ins truc cio nes Com ple jo). Dis po nen de más de 80
ins truc cio nes de má qui na en su re per to rio, al gu -
nas de las cua les son muy so fis ti ca das y po ten -
tes, re qui rien do mu chos ci clos pa ra su eje cu ción.
Una ven ta ja de los pro ce sa do res CISC es que
ofre cen al pro gra ma dor ins truc cio nes com ple jas
que ac túan co mo ma cros.
• RISC: Tan to la in dus tria de los com pu ta do -
res co mer cia les co mo la de los mi cro con tro la do -
res, es tán de can tán do se ha cia la fi lo so fía RISC
(Com pu ta do res de Jue go de Ins truc cio nes Re du -
ci do). En es tos pro ce sa do res el re per to rio de ins -
truc cio nes de má qui na es muy re du ci do y las ins -
truc cio nes son sim ples y, ge ne ral men te, se eje -
cu tan en un ci clo. La sen ci llez y ra pi dez de las
ins truc cio nes per mi ten op ti mi zar el hard wa re y el
soft wa re del pro ce sa dor.
• SISC: En los mi cro con tro la do res des ti na dos
a apli ca cio nes muy con cre tas, el jue go de ins truc -
cio nes, ade más de ser re du ci do, es "es pe cí fi co";
o sea, las ins truc cio nes se adap tan a las ne ce si -
da des de la apli ca ción pre vis ta. Es ta fi lo so fía se
ha bau ti za do con el nom bre de SISC (Com pu ta -
do res de Jue go de Ins truc cio nes Es pe cí fi co).
36 Microcontroladores
Figura 1 - Areas en las que se usan los microcontroladores.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page36

GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
la Me Mo rIa
Lamemoriadeprogramaydatosestáintegra-daenelpropiocircuitointegrado.Unapartedebesernovolátil,tipoROM,ysedestinaacontenerel programa de instrucciones que gobierna laaplicación.OtrapartedememoriaserátipoRAM,volátil,ysedestinaaguardarlasvariablesylosdatos.Lamemoriadedatos(RAM)enestosdisposi-
tivosesdepocacapacidadpuessólodebecon-tenerlasvariablesyloscambiosdeinformaciónqueseproduzcaneneltranscursodelprograma.Porotraparte,comosóloexisteunprogramaac-tivo,noserequiereguardarunacopiadelmismoenlaRAMpuesseejecutadirectamentedesdelamemoriadeprograma(ROM).El usuario de PC está habituado a manejar
Megabytes de memoria, pero los diseñadorescon microcontroladores trabajan con capacida-desdememoriadeprogramade512bytes,1kB,2kByhastaunos128kBydeRAMde32bytes,68bytes,512bytes(hastaunos4kB).Existen distintos tipos dememorias y en un
microcontrolador se puede encontrar cualquieradeellas:
• ROM con más ca ra: Es una me mo ria no vo -
lá til de só lo lec tu ra, cu yo con te ni do se gra ba du -
ran te la fa bri ca ción del chip. El tér mi no más ca ra
vie ne de la for ma co mo se fa bri can los cir cui tos
in te gra dos. Es tos se fa bri can en obleas que con -
tie nen va rias de ce nas de chips. Es tas obleas se
ob tie nen a par tir de pro ce sos fo to quí mi cos, don -
de se im preg nan ca pas de si li cio y óxi do de si li -
cio, y se gún con ven ga, se ero sio nan al ex po ner -
los a la luz. Co mo no to dos los pun tos han de ser
ero sio na dos, se si túa en tre la luz y la oblea una
más ca ra con agu je ros, de ma ne ra que don de de -
ba in ci dir la luz, és ta pa sa rá. Con va rios pro ce sos
si mi la res, pe ro más com pli ca dos, se con si gue fa -
bri car los tran sis to res y dio dos que com po nen un
cir cui to in te gra do. El al to pre cio del di se ño de la
más ca ra só lo ha ce acon se ja ble el em pleo de los
mi cro con tro la do res, con es te ti po de me mo ria,
cuan do se pre ci san can ti da des su pe rio res a va -
rios mi les de uni da des.
• OTP: Es una me mo ria no vo lá til de só lo lec -
tu ra "pro gra ma ble una so la vez" por el usua rio.
OTP (One Ti me Pro gram ma ble). Es el usua rio
quien pue de es cri bir el pro gra ma en el chip me -
dian te un sen ci llo gra ba dor con tro la do por un pro -
gra ma des de una PC. La ver sión OTP es re co -
men da ble cuan do es muy cor to el ci clo de di se ño
del pro duc to, o bien, en la cons truc ción de pro to -
ti pos y se ries muy pe que ñas.
• EPROM: Era sa ble Pro gram ma ble Read
OnIy Me mory, pue den bo rrar se y gra bar se mu -
chas ve ces. La gra ba ción se rea li za, co mo en el
ca so de los OTP, con un gra ba dor go ber na do
des de una PC. Si, pos te rior men te, se de sea bo -
rrar el con te ni do, dis po nen de una ven ta na de
cris tal en su su per fi cie, por la que se so me te a la
EPROM a ra yos ul tra vio le ta du ran te va rios mi nu -
tos. Las cáp su las son de ma te rial ce rá mi co y son
más ca ros que los mi cro con tro la do res con me -
mo ria OTP, que es tán he chos con ma te rial plás ti -
co. Hoy día se uti li zan po co, sien do sus ti tui das
por me mo rias EE PROM o Flash.
• EE PROM: Elec tri cal Era sa ble Pro gram ma -
ble Read OnIy Me mory, son me mo rias de só lo
lec tu ra, pro gra ma bles y bo rra bles eléc tri ca men te
EE PROM a tra vés de la apli ca ción de una ten -
sión de pre dis po si ción Vpp. Tan to la pro gra ma -
ción co mo el bo rra do se rea li zan eléc tri ca men te
des de el pro pio gra ba dor y ba jo el con trol pro gra -
ma do de una PC. Es
muy có mo da y rá pi da la
ope ra ción de gra ba do y
la de bo rra do. No dis po -
nen de ven ta na de cris tal
en la su per fi cie. Los mi -
cro con tro la do res do ta -
dos de me mo ria EE -
PROM una vez ins ta la -
dos en el cir cui to, pue -
Microcontroladores 3 7
Fifgura 2 - Arquitectura Von Neuman.
Fifgura 3 - Arquitectura Hardvard.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page37
MAnuAles Técnicos:
den gra bar se y bo rrar se cuan tas ve ces se quie ra
sin ser re ti ra dos de di cho cir cui to. Pa ra ello se
usan "gra ba do res en cir cui to" que con fie ren una
gran fle xi bi li dad y ra pi dez a la ho ra de rea li zar
mo di fi ca cio nes en el pro gra ma de tra ba jo. El nú -
me ro de ve ces que pue de gra bar se y bo rrar se
una me mo ria EE PROM es fi ni to, por lo que no es
re co men da ble una re pro gra ma ción con ti nua. Hoy
día es tán sien do sus ti tui das por me mo rias de ti po
Flash. Se va ex ten dien do en los fa bri can tes la
ten den cia de in cluir una pe que ña zo na de me mo -
ria EE PROM en los cir cui tos pro gra ma bles, pa ra
guar dar y mo di fi car có mo da men te una se rie de
pa rá me tros que ade cúan el dis po si ti vo a las con -
di cio nes del en tor no.
Es te ti po de me mo ria
es re la ti va men te len ta.
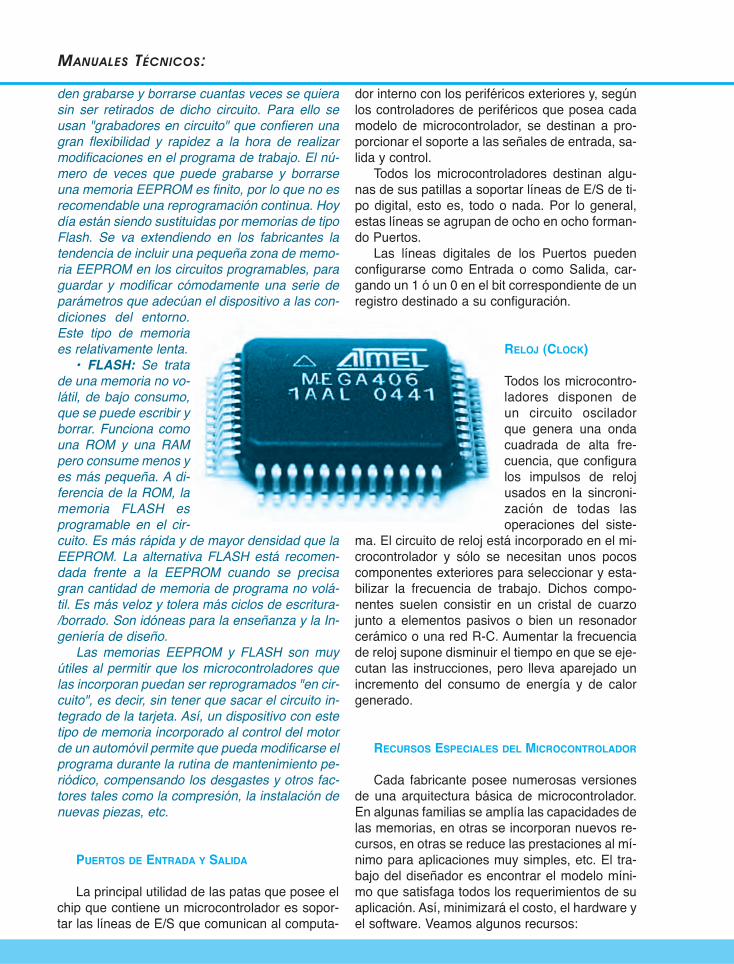
• FLASH: Se tra ta
de una me mo ria no vo -
lá til, de ba jo con su mo,
que se pue de es cri bir y
bo rrar. Fun cio na co mo
una ROM y una RAM
pe ro con su me me nos y
es más pe que ña. A di -
fe ren cia de la ROM, la
me mo ria FLASH es
pro gra ma ble en el cir -
cui to. Es más rá pi da y de ma yor den si dad que la
EE PROM. La al ter na ti va FLASH es tá re co men -
da da fren te a la EE PROM cuan do se pre ci sa
gran can ti dad de me mo ria de pro gra ma no vo lá -
til. Es más ve loz y to le ra más ci clos de es cri tu ra -
/bo rra do. Son idó neas pa ra la en se ñan za y la In -
ge nie ría de di se ño.
Las me mo rias EE PROM y FLASH son muy
úti les al per mi tir que los mi cro con tro la do res que
las in cor po ran pue dan ser re pro gra ma dos "en cir -
cui to", es de cir, sin te ner que sa car el cir cui to in -
te gra do de la tar je ta. Así, un dis po si ti vo con es te
ti po de me mo ria in cor po ra do al con trol del mo tor
de un au to mó vil per mi te que pue da mo di fi car se el
pro gra ma du ran te la ru ti na de man te ni mien to pe -
rió di co, com pen san do los des gas tes y otros fac -
to res ta les co mo la com pre sión, la ins ta la ción de
nue vas pie zas, etc.
Puer tos De en tra Da y sa lI Da
Laprincipalutilidaddelaspatasqueposeeelchipquecontieneunmicrocontroladoressopor-tarlaslíneasdeE/Squecomunicanalcomputa-
dorinternoconlosperiféricosexterioresy,segúnloscontroladoresdeperiféricosqueposeacadamodelo demicrocontrolador, se destinan a pro-porcionarelsoportealasseñalesdeentrada,sa-lidaycontrol.Todos los microcontroladores destinan algu-
nasdesuspatillasasoportarlíneasdeE/Sdeti-podigital, estoes, todoonada.Por logeneral,estaslíneasseagrupandeochoenochoforman-doPuertos.Las líneas digitales de los Puertos pueden
configurarse comoEntrada o comoSalida, car-gandoun1óun0enelbitcorrespondientedeunregistrodestinadoasuconfiguración.
re loj (CloCk)
Todos losmicrocontro-ladores disponen deun circuito osciladorque genera una ondacuadrada de alta fre-cuencia,queconfiguralos impulsos de relojusados en la sincroni-zación de todas lasoperaciones del siste-
ma.Elcircuitoderelojestáincorporadoenelmi-crocontrolador y sólo se necesitan unos pocoscomponentesexterioresparaseleccionaryesta-bilizar la frecuencia de trabajo. Dichos compo-nentes suelen consistir en un cristal de cuarzojunto a elementos pasivos o bien un resonadorcerámicoounaredR-C.Aumentarlafrecuenciaderelojsuponedisminuireltiempoenqueseeje-cutan las instrucciones,pero llevaaparejadounincremento del consumo de energía y de calorgenerado.
re Cur sos es Pe CIa les Del MI Cro Con tro la Dor
Cada fabricanteposeenumerosas versionesdeunaarquitectura básica demicrocontrolador.Enalgunasfamiliasseamplíalascapacidadesdelasmemorias,enotrasseincorporannuevosre-cursos,enotrassereducelasprestacionesalmí-nimoparaaplicacionesmuysimples,etc.El tra-bajodeldiseñadoresencontrarelmodelomíni-moquesatisfagatodoslosrequerimientosdesuaplicación.Así,minimizaráelcosto,elhardwareyelsoftware.Veamosalgunosrecursos:
38 Microcontroladores
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page38
GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
Tem po ri za do res y Con ta do res
Lostemporizadoresseempleanparacontro-larperíodosdetiempoyloscontadoresparalle-varlacuentadeacontecimientosquesucedenenelexterior.Para lamedidade tiempossecargaun registro conel valoradecuadoya continua-ción dicho valor se va incrementando o decre-mentandoal ritmode los impulsosderelojoal-gúnmúltiplohastaquesedesbordeylleguea0,momentoenelqueseproduceunavisoatravésdelcambiodeinformaciónenunavariableore-gistro (registro de código de condiciones, porejemplo).Cuando se desean contar acontecimientos
quesematerializanporcambiosdeniveloflan-cosenalgunadelaspatillasdelmicrocontrolador,el mencionado registro se va incrementando odecrementandoalritmodedichosimpulsos.
Pe rro Guar dián o "Watch dog"
Normalmente,cuandounordenadorpersonalsebloqueaporunfallodel software u otracausa, sepulsael bo-tóndelresetysereini-cia el sistema. Unmi-crocontrolador suelefuncionarsinelcontrolde un supervisor y deforma continuada las24horasdeldía.ElPe-rro Guardián consisteen un temporizadorque, cuando se des-borda y pasa por 0,provocaunresetauto-máticamenteenelsis-temaygeneralmenteseusapara“detectar”fallasdeprogramasqueocasionaríanqueelmicrosequede trabajando dentro de un loop indefinida-mente.Sedebediseñarelprogramade trabajoque controla la tarea de forma que refresque oinicialicealPerroGuardiánantesdequeprovo-queelreset.Sifallaelprogramaosebloquea,elprograma no refrescará al PerroGuardián y, alcompletar su temporización, provocará el resetdelsistema.
Sleep, Es ta do de Re po so ó de Ba jo Con su mo
Enmuchas situacionesde trabajo enqueelmicrocontroladordebeesperar,sinhacernada,aque se produzca algún acontecimiento externoque le ponga de nuevo en funcionamiento, es
precisoahorrarpilas;comoenelcasodeloscon-trolesremotos,dondeelsistemaestáalaesperadequeelusuariooprimaunatecla.Paraahorrarenergía,losmicrocontroladoresdisponendeunainstrucciónespecial(SLEEPenalgunosmicros),quelespasaalestadodereposoodebajocon-sumo,enelcual losrequerimientosdepotenciasonmínimos.Endichoestadosedetieneelrelojprincipaly
se"congelan"suscircuitosasociados,quedandoelmicrocontroladorsumidoenunprofundo"sue-ño".Alactivarseunainterrupciónocasionadaporel acontecimiento esperado, elmicrocontroladorsedespiertayreanudasutrabajo.Parahacernosunaidea,estafunciónesparecidaalaopcióndeSuspenderenelmenúparaapagarelequipo(enaquellas PCs con administración avanzada deenergía).
Pro ce sa mien to de Se ña les Ana ló gi cas
Los microcontroladores que incorporan unConversorA/D (Analó-gico/Digital) puedenprocesar señales ana-lógicas, tan abundan-tesenlasaplicaciones.Suelendisponerdeunmultiplexor que permi-te aplicar a la entradadel CAD diversas se-ñales analógicas des-de las patillas del cir-cuitointegrado.PorotraparteunCDAoconversorD/A trans-forma los datos digita-les obtenidos del pro-
cesamiento de la computador en su correspon-diente señal analógica que saca al exterior porunadelaspatillasdelacápsula.Existenmuchosdispositivos de salida que trabajan con señalesanalógicas.Algunosmodelos demicrocontroladores dis-
ponen internamente de unAmplificador Opera-cional,queactúacomocomparadorentreunase-ñalfijadereferenciayotravariablequeseaplicaporunadelaspatillasdelacápsula.Lasalidadelcomparadorproporcionaunnivellógico1ó0se-gúnunaseñalseamayoromenorquelaotra.Tambiénhaymodelosdemicrocontroladores
conunmódulodetensióndereferenciaquepro-porcionadiversastensionesdereferenciaquesepuedenaplicarenloscomparadores.
Microcontroladores 3 9
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page39
MAnuAles Técnicos:
Pro tec ción "Brow nout"
Estaprotecciónlarealizauncircuitoquerese-teaalmicrocontroladorcuandolatensióndeali-mentación(VDD)esinferioraunmínimo("brow-nout").Mientras la tensióndealimentaciónsea infe-
rioraldebrownout,eldispositivosemantienere-seteado, comenzando a funcionar normalmentecuandosobrepasadichovalor.Estoesmuyútilparaevitardatoserróneosportransicionesyrui-dosenlalíneadealimentación.
Mo du la dor de An cho de Pul sos o PWM
Son circuitos que proporcionan en su salidaimpulsosdeanchuravariable,queseofrecenalexterioratravésdelaspatillasdelencapsulado.Esútilparasistemasdecontroldepotencia,co-moporejemplomotores.
Puer tos de Co mu ni ca ción
Para que el micro se pueda comunicar conotrosdispositivos,otrosbusesdemicroprocesa-dores,busesdesistemas,busesderedesypo-der adaptarlos con otros elementos bajo otrasnormasyprotocolosesprecisoagregarleunida-desopuertosdecomunicación.Algunos modelos disponen de recursos que
permitendirectamente esta tarea, entre los quedestacan:
• UART, adap ta dor de co mu ni ca ción se rie
asin cró ni ca.
• USART, adap ta dor de co mu ni ca ción se rie
sin cró ni ca y asin cró ni ca.
• Puer to pa ra le lo es cla vo pa ra po der co nec -
tar se con los bu ses de otros mi cro pro ce sa do res.
• USB (Uni ver sal Se rial Bus).
• Bus I2C, que es una in ter faz se rie de dos hi -
los de sa rro lla do por Phi lips.
• In ter fa ce SPI, un puer to se rie sin cró ni co.
• CAN (Con tro ller Area Net work), pa ra per mi -
tir la adap ta ción con re des de co ne xio na do mul ti -
ple xa do de sa rro lla do con jun ta men te por Bosch e
In tel pa ra el ca blea do de dis po si ti vos en au to mó -
vi les. En EE.UU. se usa el J185O.
• TC P/IP, ya exis ten mi cro con tro la do res con
un adap ta dor de co mu ni ca ción pa ra es te pro to co -
lo.
Tan to el I2C en te le vi so res, co mo el Bus CAN
en au to mó vi les, fue ron di se ña dos pa ra sim pli fi car
el cir cui to que su po ne un bus pa ra le lo de 8 lí neas
den tro de un te le vi sor, así co mo pa ra li brar de la
car ga que su po ne una can ti dad in gen te de ca bles
en un ve hí cu lo.
los MI Cro Con tro la Do res aVr
La empresaAtmel ha desarrollado una grancantidaddemicrocontroladoresendiferentesga-mas,deformasimilara loquehahecho laem-presaMicrochipconnuestrosviejosamigos:“losPICs”.Quizá, el más popular es el ATMEL
AT90S1200,queesalgoasí comoel16F84deMicrochip(encuantoapopularidadserefiere).Acontinuaciónserealizaalgunosdatoscomparati-vosentreelAT90S1200yelPIC16F84:
Nº de ins truc cio nes: AVR - 89, PIC - 35
Re gis tros RAM: AVR - 32, PIC - 68
Ve lo ci dad: AVR - 12MHz, PIC: 20MHz
Me mo ria de Pro gra ma: AVR - 1kBy te FLASH
(512 lí neas de pro gra ma, 16bits por inst.),
PIC:1kx14 (1024 lí neas de pro gra ma de 14 bit ca -
da una).
Me mo ria EE PROM li bre: AVR - 64By tes, PIC
- 64By tes
Sa li das: AVR - 15, PIC - 13
TI MER: AVR - 1 de 8bit (con pres ca ler des de
CK has ta CK/1024), PIC - 1 de 8 bit (con pres ca -
ler des de 1:2 has ta 1:256)
Com pa ra dor Ana ló gi co (NO ADC): AVR - 1
PIC - NO PO SEE
Watch dog: Am bos po seen
Os ci la dor in ter no: Am bos po seen, en el AVR
só lo ha bi li ta ble con pro gra ma ción pa ra le la
Ni ve les de pi la (STACK): AVR - 3, PIC - 8
In te rrup cio nes: AVR - re set, in ter na, ex ter na,
ti mer y por com pa ra dor ana ló gi co, PIC - 5 in te -
rrup cio nes
Básicamente,losAVRtienen3registrosparacadapuertodesalidaasaber:
• DDRB - Sir ve pa ra de cir qué pa tas son de
en tra da o sa li da, “0” es en tra da, “1” es sa li da (es
in ver so a los PIC).
• PINB - Re gis tro que sir ve pa ra en tra das so -
la men te.
• PORTB - Re gis tro que sir ve pa ra sa li das so -
la men te.
Esto significa que para leer una entrada sedebeusarelregistroPINBmientrasqueparaes-cribirdatosenunasalidasedebeemplearelre-gistroPORTB(obviamentesihacemosreferenciaalaspatasdelpuertoB).EnelATMELAT90S1200elPortBtiene8bits
40 Microcontroladores
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page40
GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
dedatos,adiferenciadelPORTDquetienesólo7.Elbit7delPORTDnoseemplea;PORTDtam-bién consta de 3 registros: DDRD, PORTD yPIND.
los at Mel De uso au to Mo trIz
Por al gún mi cro de be mos em pe zar…
Cuandocomenzamosarealizarartículosconmicrocontroladores PIC en Saber Electrónica,allápor1998,elegimosel16F84ynuestro“mo-deloomentor”eraelviejoyconocidoDavidTate.Conversandoconel Ing. IsmaelCervantesyenbaseal trabajo queestá realizandoel Ing. LuísRoberto Rodríguez, llegué a la conclusión quedebíarecurrira lafuenteyasídeterminéquelomejoresrealizar ladescripcióndevariosmode-los,tareaqueiremosdesarrollandoendiferentesediciones de nuestra querida revista. En estaoportunidadespecificaremosalgunascaracterís-ticasydescribiremoselfuncionamientodelase-riedeusoautomotorATtiny25/45/85.Asuvez,paraconcluir,daremosloscircuitosdeprograma-dores de algunos modelos con licencia libreGNU.
la se rIe at tIny 25/45/85
El ATtiny 25/45/85 es un microcontroladorCMOSde8bitsdebajapotenciabasadoenlaar-quitecturaRISCmejoradadelAVR.Mediante laejecucióndepoderosasinstruccionesenunsolociclodereloj,elATtiny25/45/85lograunaproduc-ciónquealcanza1MIPSporMHz,permitiéndoleal diseñador de sistemas optimizar la relaciónconsumodepotencia-velocidaddeprocesamien-to.Lasprincipalescaracterísticasdeldispositivo
sonlassiguientes:
* Al to de sem pe ño, ba ja po ten cia.
* Ar qui tec tu ra RISC avan za da:
-120 ins truc cio nes po de ro sas, la ma yo ría
con eje cu ción de un so lo ci clo de re loj.
-32x8 re gis tros de tra ba jo de pro pó si to
ge ne ral.
-ope ra ción to tal men te es tá ti ca.
* Pro gra ma y Me mo ria de Da tos no vo lá ti les:
-2/4/8 kby tes de Me mo ria Flash Pro gra -
ma ble en el sis te ma, con du ra ción: 10000 ci clos
de es cri tu ra /bo rra do.
-128/256/512 by tes de EE PROM pro gra -
ma ble en el sis te ma, con du ra ción: 100000 ci clos
de es cri tu ra /bo rra do.
-128/256/512 by tes de SRAM in ter na.
-Ce rro jo de pro gra ma ción pa ra au to pro -
gra mar la Me mo ria Flash y Se gu ri dad de Da tos
de EE PROM.
* Ca rac te rís ti cas Pe ri fé ri cas:
-Con ta dor /Tem po ri za dor de 8 bits con
Pres ca ler y dos ca na les PWM.
-Con ta dor /Tem po ri za dor de Al ta Ve lo ci -
dad de 8 bits con Pres ca ler se pa ra do:
·Dos Sa li das PWM de Al ta Fre cuen cia
con Re gis tros de Com pa ra ción de Sa li da se pa ra -
dos.
·Ge ne ra dor Pro gra ma ble de Tiem po
Muer to.
-In ter faz Se rie Uni ver sal con De tec tor de
Con di ción de Co mien zo.
-ADC de 10 bits:
·Cua tro Ca na les de Una So la Sa li da.
·Dos Pa res de Ca na les ADC Di fe ren cia -
les con Ga nan cia Pro gra ma ble (1x, 20x).
-Tem po ri za dor Pro gra ma ble de Vi gi lan -
cia con Os ci la dor se pa ra do den tro del in te gra do.
-Com pa ra dor Ana ló gi co den tro del in te -
gra do.
* Ca rac te rís ti cas Es pe cia les del Mi cro con -
tro la dor:
-Sis te ma de De pu ra ción de bug WI RE
den tro del in te gra do.
-Pro gra ma ble den tro del Sis te ma a tra -
vés del Puer to SPI.
-Fuen tes de In te rrup ción Ex ter nas e In -
ter nas.
-Mo dos de Des can so en Ba ja Po ten cia,
de Re duc ción de Rui do de ADC, y de Re duc ción
de Po ten cia.
-Cir cui to Me jo ra do de Rei ni cia li za ción de
En cen di do.
-Cir cui to Pro gra ma ble de De tec ción de
Brown-out (es ta do en que la ten sión es en tre un
8 y un 12% in fe rior al va lor tí pi co) .
-Os ci la dor Ca li bra do in ter no.
* En tra das /Sa li das y En cap su la dos:
-Seis Lí neas Pro gra ma bles de En tra da -
/Sa li da.
-SOIC de 8 pa tas.
Microcontroladores 4 1
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page41

MAnuAles Técnicos:
* Ten sión de Fun cio na mien to:
-2,7 a 5,5V
* Ran go de Ve lo ci da des:
-AT tiny25/45/85: 0-8 MHz@2,7-5,5V, 0-
16MHz @4,5-5,5V.
* Ran go de Tem pe ra tu ras del Au to mó vil:
-de -40ºC a +125ºC
* Ba jo Con su mo de Po ten cia:
-Mo do Ac ti vo: 1MHz, 2,7V : 500µA
-Mo do de Po ten cia Re du ci da: 2µA con 2,7V.
Lafigura4muestraladisposicióndetermina-lesdeestemicrocontrolador.
DIa gra Ma en Blo ques
Enlafigura4sepuedeobservareldiagramaenbloquesdelaserieATtiny25/45/85deATmel.El núcleo delAVR combina un conjunto rico
de instrucciones con 32 registros de trabajo depropósitogeneral.Los32registrosestándirectamenteconecta-
dosa laUnidadAritmético-Lógica (ALU),permi-tiendoque2registrosindependientesseaccedanenunasolainstrucciónejecutadaenunciclodereloj.Laarquitecturaresultanteesmáseficienteen
loquerespectaacódigo,en tantoque lograunrendimientohasta10vecessuperiorquelosmi-crocontroladoresconvencionalesCISC.De las características enunciadas anterior-
mente,sobreelATtiny25/45/85podemosdesta-carlassiguientes:2/4/8kBdeMemoriaFlashPro-gramable en el Sistema, 128/256/512 bytes deEEPROM,128/256/256bytesdeSRAM,6líneasdeentrada/salidadepropósitogeneral,32regis-trosdetrabajodepropósitogeneral,unTempori-zador/Contadorde8bitsconmodosdecompara-ción,unTemporizador/Contadordealtavelocidadde8bits,una InterfazSerieUniversal, Interrup-cionesInternasyExternas,unADCde4canalesde10bits,unTemporizadorProgramabledeVigi-lanciaconOsciladorInternoy3modosdeahorrodepotenciaseleccionablesporsoftware.ElmododeDescansodetienelaCPUentan-
to que permite que la SRAM, el Temporizador-/Contador,el ADC,elComparadorAnalógico,yel sistema de Interrupción sigan trabajando. ElmododeReduccióndePotenciaguardaelconte-
nidodelosregistros,inhabilitandotodaslasfun-cionesdel integradohasta la siguiente Interrup-ciónoReinicialización.ElmododeReduccióndeRuidodelADCdetienelaCPUytodoslosmódu-losdeE/SexceptoelADC,afindeminimizarelruido de conmutación durante las conversionesdelADC.Eldispositivosefabricausandolatecnología
dememoriano-volátilyaltadensidaddeATMEL.Elsistemadeinterfazserialquemanejaelin-
tegradopermitequelaMemoriadeProgramasereprogrameenelsistemaatravésdeunainterfazserie(SPI)medianteunprogramadorconvencio-naldememoriasno-volátilesomedianteuncódi-godecarga incorporadoenel integradoqueseejecutaenelnúcleodelAVR.El AVR tiene un soporte basado en herra-
mientasdedesarrollodel sistema ydeprogra-maciónqueincluyen:CompiladoresC,Macroen-sambladores,Depurador/SimuladoresdeProgra-ma, Emuladores en el Circuito y Conjuntos deComponentesdeEvaluación.
Estemicrocontroladorhasidodesarrolladoyfabricadodeacuerdoconlosrequerimientosmásexigentes de la norma internacional ISO-TS-16949quedefinelosgradosdecalidadparausoautomotriz.
Des CrIP CIón De los PI nes:
Vcc: Tensióndealimentación.
gnD: Masa,tierra.
Puer to B (PB5… PB0): El Puerto B es unpuertodeE/Sbidireccionalde6bitsconresisto-res pull-up internos (seleccionables para cadabit).LosbuffersdesalidadelpuertoBtienenca-racterísticassimétricasdeexcitaciónconaltaca-pacidad,tantodefuentecomodesumidero.Co-moentradas,laspatasdelPuertoBqueexterna-menteseponenen0entregaráncorrientesiseactivanlosresistorespull-up.LaspatasdelPuer-toB son del tipo tri-state cuando se activa unacondición de reinicialización, aunque el reloj noestéfuncionando.
re set: EntradadeReinicialización.Un0enestapata,durantemásdeunpulsomínimo,ge-neraráunareinicializaciónaunqueelrelojnoes-téfuncionando.
42 Microcontroladores
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page42
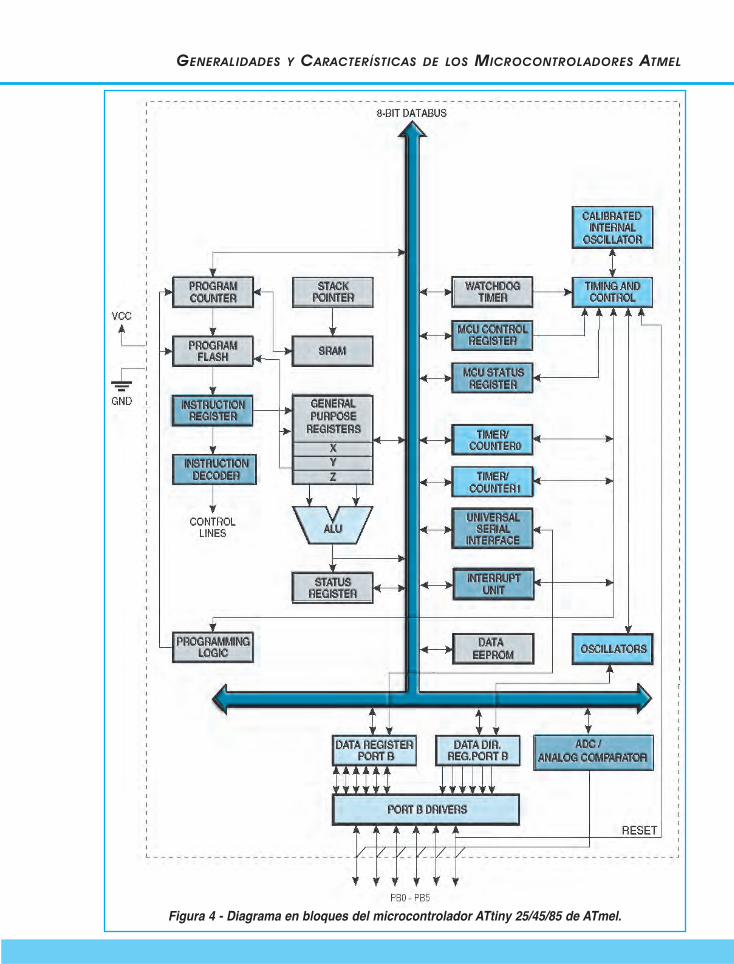
GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
Microcontroladores 4 3
Figura 4 - Diagrama en bloques del microcontrolador ATtiny 25/45/85 de ATmel.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page43
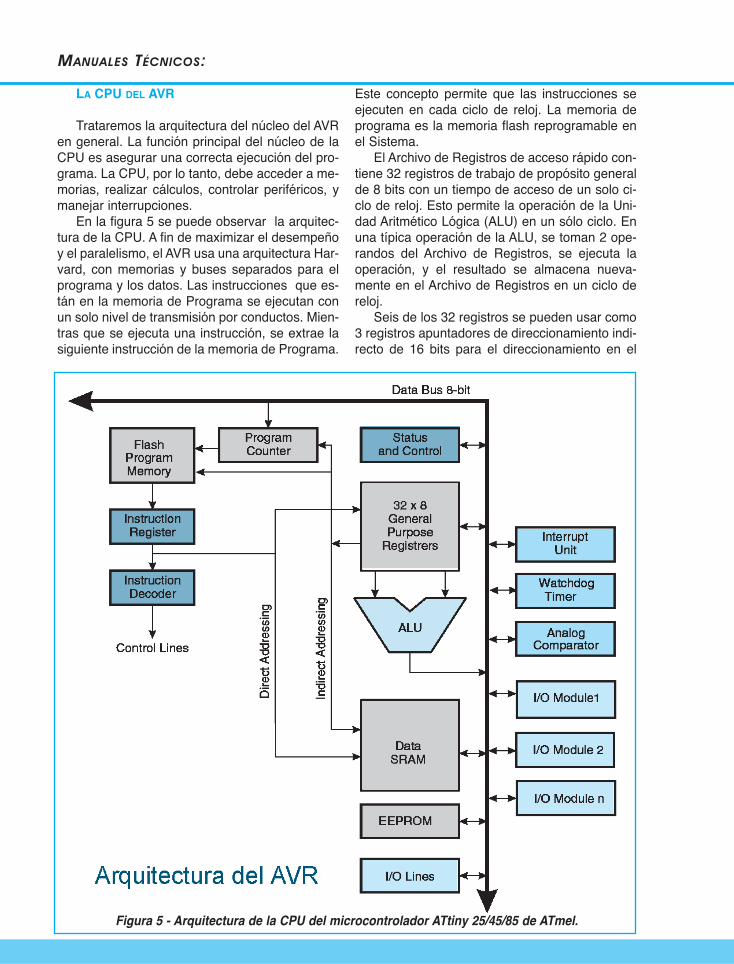
MAnuAles Técnicos:
la CPu Del aVr
TrataremoslaarquitecturadelnúcleodelAVRengeneral.LafunciónprincipaldelnúcleodelaCPUesasegurarunacorrectaejecucióndelpro-grama.LaCPU,porlotanto,debeaccederame-morias, realizar cálculos, controlar periféricos, ymanejarinterrupciones.Enlafigura5sepuedeobservarlaarquitec-
turadelaCPU.Afindemaximizareldesempeñoyelparalelismo,elAVRusaunaarquitecturaHar-vard, conmemorias y buses separados para elprogramaylosdatos.Lasinstruccionesquees-tánenlamemoriadeProgramaseejecutanconunsoloniveldetransmisiónporconductos.Mien-trasqueseejecutaunainstrucción,seextraelasiguienteinstruccióndelamemoriadePrograma.
Este concepto permite que las instrucciones seejecuten en cada ciclo de reloj. Lamemoria deprogramaeslamemoriaflashreprogramableenelSistema.ElArchivodeRegistrosdeaccesorápidocon-
tiene32registrosdetrabajodepropósitogeneralde8bitsconuntiempodeaccesodeunsoloci-clodereloj.EstopermitelaoperacióndelaUni-dadAritméticoLógica(ALU)enunsólociclo.EnunatípicaoperacióndelaALU,setoman2ope-randos del Archivo de Registros, se ejecuta laoperación, y el resultado se almacena nueva-menteenelArchivodeRegistrosenunciclodereloj.Seisdelos32registrossepuedenusarcomo
3registrosapuntadoresdedireccionamientoindi-recto de 16 bits para el direccionamiento en el
44 Microcontroladores
Figura 5 - Arquitectura de la CPU del microcontrolador ATtiny 25/45/85 de ATmel.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page44

GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
EspaciodeDatos,permitiendoeficientescálculosdedirecciones.Unodeestosapuntadoresdedi-recciones tambiénsepuedeusarcomoapunta-dordedireccionesparatablasdeconsultaenlamemoriaFlashdePrograma.Estosregistrosfun-cionalesagregadossonlosregistrosX,YyZde16bits.LaALUsoportaoperacionesaritméticasyló-
gicasentreregistrosoentreunaconstanteyunregistro.Lasoperacionesdeunsoloregistrotam-biénsepuedenejecutarenlaALU.Luegodeunaoperaciónaritmética,elRegistrodeEstadoseac-tualizaparareflejarlainformaciónsobreelresul-tadodelaoperación.ElProgramatieneinstruccionesdesaltocon-
dicionaleincondicionaleinstruccionesdellama-da,capacesdedireccionarenformadirectatodoelespaciodedirecciones.Lamayoríadelasins-truccionesdelAVRtienenunsoloformatodepa-labrade16bits.CadadireccióndememoriadeProgramacontieneunainstrucciónde16ode32bits.Durante las interrupciones y las llamadas a
subrutina,elContadordeProgramadedirecciónderetorno(PC)sealmacenaenlaPila.LaPilaseubicaenlaSRAMdedatosgenerales,yencon-secuenciaeltamañodelaPilasóloestálimitadoporeltamañototaldelaSRAMysuuso.TodoslosprogramasdelusuariodebeninicializarelSPenlarutinadereinicialización(antesqueseeje-cutenlassubrutinasolasinterrupciones).ElPun-terodePila(SP)sepuedeleer/escribireneles-paciodeE/S.LaSRAMdedatossepuedeacce-der fácilmentemediante 5modos diferentes dedireccionamiento soportados en la arquitecturadelAVR.Los espacios dememoria en la arquitectura
delAVRsontodoslinealesyregulares.Unmódulo de interrupción flexible tiene sus
registrosdecontrolenelespaciodeE/SconunbitadicionaldeHabilitaciónde InterrupciónGlo-balenelRegistrodeEstado.Todaslasinterrup-cionestienenunVectordeInterrupciónseparadoenlatabladeVectoresdeInterrupción.Lasinte-rrupciones tienen una prioridad de acuerdo con
suposiciónenlatabla.Cuantomásbajaesladi-reccióndelVectordeInterrupciones,másaltaeslaprioridad.ElespaciodememoriadeE/Scontiene64di-
reccionespara funcionesperiféricasde laCPUcomoRegistrosdeControl,SPI,yotrasfuncionesdeE/S.LamemoriadeE/Ssepuedeaccederdi-rectamente, o como las posiciones del EspaciodeDatosqueestánacontinuacióndelasdelAr-chivodeRegistros,0x20-0x5F.
la unI DaD arIt Mé tI Co-ló gI Ca (alu)
LaALUdel AVRdealtodesempeño trabajaenconexióndirectacontodoslos32registrosdetrabajodepropósitogeneral.Dentrodeunsolocicloderelojseejecutanlasoperacionesaritmé-ticasentreregistrosdepropósitogeneraloentreunregistroyunoinmediato.Lasoperacionesdela ALU se dividen en 3 categorías principales:aritméticas,lógicas,yfuncionesconbits.Algunasimplementacionesdelaarquitecturatambiénpro-veen un poderoso multiplicador que soporta lamultiplicaciónconsigno, sinsignoyel formatofraccional.
el re gIs tro De es ta Do
El Registro de Estado contiene informaciónsobreelresultadodelainstrucciónmásreciente-menteejecutada.Estainformaciónsepuedeusarparaalterarelflujodelprogramaafindeejecutaroperacionescondicionales.NotemosqueelRe-gistrodeEstadoseactualizadespuésde todaslasoperacionesdelaALU.Esto,enmuchosca-sos,evita lanecesidaddeusar instruccionesdecomparación especiales, resultando un códigomáscompactoymásrápido.ElRegistrodeEstadonosealmacenaauto-
máticamentecuandose ingresaaunarutinadeinterrupciónysevuelveaalmacenarcuandoseregresadeunainterrupción.Estosemanejame-dianteelsoftware.
Microcontroladores 4 5
Figura 6 - El registro de estado del microcontrolador ATtiny 25/45/85 de ATmel.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page45

MAnuAles Técnicos:
ElRegistrodeEstadodelAVR(SREG)poseeunaestructuracomolamostradaenlafigura6.
Bit 7-I: Ha bi li ta ción Glo bal de In te rrup ción.
Estebitdebeponerseen1paraquesehabi-liten las interrupciones. El control individual dehabilitación de interrupción se ejecuta luego enregistrosdecontrolseparados.Siseponeen0,nosehabilitaningunainterrupción,independien-tementedecómoesténlasposicionesindividua-lesdehabilitacióndeinterrupción.ElbitIsepo-ne en 0mediante hardware después que hayaocurridounainterrupción,yseponeen1median-telainstrucciónRETIparapermitirinterrupcionessubsiguientes.ElbitItambiénsepuedeponeren1yen0mediantelasinstruccionesSEIyCLI.
Bit 6 -T: Al ma ce na mien to de Co pia de Bit.
Las instrucciones de copia de bit BLD (BitLoaD)yBST(BitStore)usanelbitTcomofuen-teodestinodelbitoperado.UnbitdeunregistrodelArchivo de Registros se puede copiar en TmediantelainstrucciónBST,yunbitenTsepue-decopiarenunbitdeunregistrodelArchivodeRegistrosmediantelainstrucciónBLD.
Bit 5 - H: Ban de ra de Se mi-aca rreo.
Este bit H indica un semi-acarreo en algunas operacio-nes aritméticas. El semi-aca-rreo es útil en la aritméticaBCD.
Bit 4 - S: Bit de Sig no.
El bit S siempre es unaOexclusivaentrelaBanderaNe-gativaN y la Bandera deRe-balseVconcomplementoa2.
Bit 3 - V: Ban de ra de Re -
bal se con com ple men to a 2.
Estebitsoportaunaaritmé-ticadecomplementoa2.
Bit 2 - N: Ban de ra Ne ga ti va.
Estebit indicaunresultadonegativoenunaoperaciónarit-méticaológica.
Bit 1 - Z: Ban de ra Nu la.
Estebit indicaunresultadonuloenunaoperaciónaritméti-caológica.
Bit 0 - C: Ban de ra de Aca rreo.
Este bit indica un acarreo en una operaciónaritméticaológica.
re gIs tros De Pro Pó sI to ge ne ral
ElArchivo de Registros se optimiza para elconjunto de instrucciones RISC mejorado delAVR.Afindelograreldesempeñoylaflexibilidadrequeridas,elArchivodeRegistrossoportalossi-guientesesquemasdeE/S:
• Un ope ran do de sa li da de 8 bits y una en tra -
da de re sul ta dos de 8 bits.
• Dos ope ran dos de sa li da de 8 bits y una en -
tra da de re sul ta dos de 8 bits.
• Dos ope ran dos de sa li da de 8 bits y una en -
tra da de re sul ta dos de 16 bits.
• Un ope ran do de sa li da de 16 bits y una en -
tra da de re sul ta dos de 16 bits.
Lafigura7muestralaestructuradelos32re-gistros de trabajo de propósito general de laCPU.Lamayoría de las instrucciones que operan
enelArchivodeRegistrostienenaccesodirecto
46 Microcontroladores
Figura 7 - Los registros de trabajo del micro.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page46

GenerAlidAdes y cArAcTerísTicAs de los MicroconTrolAdores ATMel
a todos los registros, y lamayoría deellas soninstruccionesdeunsolociclo.Comoseveenlafigura7,acadaregistrose
leasignaunadireccióndememoriadeDatos,lascualessemapeandirectamenteenlasprimeras32posicionesdelEspaciodeDatosdelusuario.Aunquenoseimplementanfísicamentecomopo-siciones de memoria de SRAM, esta organiza-ción dememoria proporciona una gran flexibili-dadenelaccesodelosregistros,yaquelosre-gistros apuntadoresX,Y yZ puedenapuntar acualquierregistrodelarchivo.
los re gIs tros X, y y z
LosregistrosR26..R31tienenalgunasfuncio-nes adicionales a su uso de propósito general.Estossonpunterosdedireccionesde16bitspa-ra el direccionamiento indirecto del espacio dedatos.Los3registrosX,YyZdedireccionamien-toindirectosedefinencomosedescribeenlafi-gura8.Enlosdistintosmodosdedireccionamien-toestosregistrosdedireccionestienenfuncionestalescomodesplazamientofijo,incrementoauto-máticoydecrementoautomático.
Puntero De PIla
La Pila se usa principalmente para guardardatos temporarios, guardar variables locales yguardar direcciones de regreso después de lasinterrupcionesydelasllamadasasubrutinas.ElRegistro del Puntero de Pila siempre apunta altopedelaPila.LaPilaseimplementacreciendodeposicionesdememoriamásaltasamásbajas.EstoimplicaqueelcomandoPUSHdisminuyeelPunterodePila.ElPunterodePilaapuntaaláreadePiladela
SRAMdedatosdondeestánubicadas laspilasdeSubrutinaeInterrupción.EsteespaciodePilaenlaSRAMdedatosdebeserdefinidoporelpro-gramaantesdequeseejecutecualquierllamadaasubrutinaosehabilitecualquierinterrupción.ElPuntero de Pila debe ponerse en un punto porencimade0x60;sedecrementaen1cuandoseponeundatoenlaPilaconlainstrucciónPUSH,ysedecrementaen2cuandosepone ladirec-ciónderegresoenlaPilaconllamadaasubruti-naointerrupción.Seincrementaen1cuandoseextraeundatodelaPilaconlainstrucciónPOP,yseincrementaen2cuandoseextraeundatodelaPilaconregresodesubrutinaREToregresode
Microcontroladores 4 7
Figura 8 - Registros de propósito general X, Y y Z.
Figura 9 - Registro puntero de pila de un ATMEL.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page47
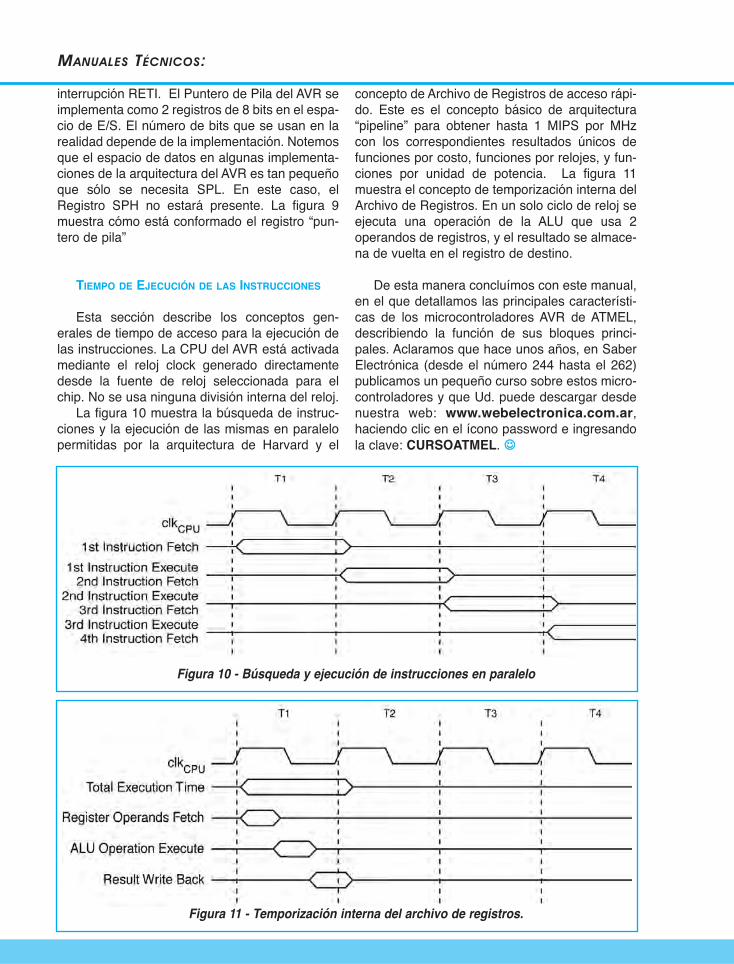
MAnuAles Técnicos:
interrupciónRETI.ElPunterodePiladelAVRseimplementacomo2registrosde8bitsenelespa-ciodeE/S.Elnúmerodebitsqueseusanenlarealidaddependedelaimplementación.Notemosqueelespaciodedatosenalgunasimplementa-cionesdelaarquitecturadelAVRestanpequeñoque sólo se necesita SPL. En este caso, elRegistro SPH no estará presente. La figura 9muestracómoestáconformadoelregistro“pun-terodepila”
tIeMPo De ejeCuCIón De las InstruCCIones
Esta sección describe los conceptos gen-eralesdetiempodeaccesoparalaejecucióndelasinstrucciones.LaCPUdelAVRestáactivadamediante el reloj clock generado directamentedesde la fuente de reloj seleccionada para elchip.Noseusaningunadivisióninternadelreloj.Lafigura10muestralabúsquedadeinstruc-
cionesy laejecucióndelasmismasenparalelopermitidas por la arquitectura de Harvard y el
conceptodeArchivodeRegistrosdeaccesorápi-do. Este es el concepto básico de arquitectura“pipeline” para obtener hasta 1 MIPS por MHzcon los correspondientes resultados únicos defuncionesporcosto,funcionesporrelojes,yfun-ciones por unidad de potencia. La figura 11muestraelconceptodetemporizacióninternadelArchivodeRegistros.Enunsolocicloderelojseejecuta una operación de la ALU que usa 2operandosderegistros,yelresultadosealmace-nadevueltaenelregistrodedestino.
Deestamaneraconcluímosconestemanual,enelquedetallamoslasprincipalescaracterísti-cas de los microcontroladoresAVR deATMEL,describiendo la función de sus bloques princi-pales.Aclaramosquehaceunosaños,enSaberElectrónica (desdeelnúmero244hastael262)publicamosunpequeñocursosobreestosmicro-controladoresyqueUd.puededescargardesdenuestra web: www.webelectronica.com.ar,haciendoclicenelíconopasswordeingresando
laclave:CursoatMel.J
48 Microcontroladores
Figura 10 - Búsqueda y ejecución de instrucciones en paralelo
Figura 11 - Temporización interna del archivo de registros.
Manual-Atmel:*Cap4-telefonia23/02/1413:19Page48
Proyectos Electrónicos 49
normalmente asociamos alvúmetro como un instrumentodecorativo que da una indica-ción de la potencia que estágenerando un amplificador; sinembargo el uso de este aparatopuede extenderse a un sin finde aplicaciones, en las que serequiere tener una medida dela potencia puesta en juego enun circuito. en este artículo proponemos el armado de algunos circuitos sencillos,tanto con compuertas digitales como con circuitos integrados de usos específicos.
Por: Luis Horacio rodríguez - e-mail: [email protected]
IntroduccIón
El vúmetro fue desarrollado originalmente en1939 por Bell Labs para la medición y la normaliza-ción de los niveles en las líneastelefónicas.Actualmente suelen incluirse en equiposde audio para mostrar un nivel de señal en unidadesde volumen.
Básicamente un vúmetro es un medidor de volu-men. Hoy en día, existen vúmetros construidos demuchas formas diferentes, podemos encontrarlosanalógicos, otros a base de LEDs normalmente ver-des, amarillos y rojos e, incluso, representando lasunidades de volumen en forma de barra en una pan-talla LCD.
Vúmetro cmoS
Los VU de LED se pueden elaborar siguiendodiferentes técnicas. Por ejemplo, el uso de transisto-res individuales para la excitación de los LEDs puedeaumentar bastante la complejidad del montaje y su
tamaño y por ello se suele preferir el empleo de cir-cuitos integrados.
Por medio de un circuito integrado CMOS, propo-nemos el armado de un sensible VUmetro del tipo“barra móvil” para 4 LEDs, fácilmente expansible a 8.Con el proyecto indicado tendremos una escala deLED que se puede acoplar prácticamente a cualquieraparato de sonido, tiene pocos componentes, uncosto bastante accesible y puede ser armado hastapor principiantes.
Se trata de un proyecto muy interesante y deexcelente desempeño que utiliza un integrado digitalcomún de costo bastante bajo (mucho menos que losdedicados especiales para “bargraph” o barras deLEDs) y que exige mucho menos componentes exter-nos que una versión transistorizada.
El proyecto básico se hace para la excitación de 4LEDs a partir de un canal de cualquier sistema deaudio, exigiendo alrededor de 200mW para su exci-tación, pero su ampliación a 8 LEDs es simple y sepueden aplicar potencias mayores, hasta más de 100watt al circuito con la simple utilización de un resistor(Rx) de valor apropiado.
MM onta jeonta je
VúmetrosInstrumentos medIdores de PotencIa
Mont - Vu como medidor.qxd:lx1435.qxd 23/02/14 13:24 Page 49

La alimentación del circuito, se hace con una ten-sión de 9V a 12V lo que significa que tanto podemosusarlo con una fuente en un equipo de audio domés-tico como en el automóvil, alimentado por subatería.
El circuito integrado CD4093 consiste en4 puertas disparadoras Schmitt (NANDSchmitt Triggers) “NO-Y” que se caracterizanpor una histéresis bastante acentuada.
Si conectamos una de las entradas decada compuerta de este integrado al polopositivo de la alimentación, o sea, al nivellógico 1 (alto), las transformaremos en com-puertas inversoras. Esto significa que,cuando la tensión en la entrada de cada unade las puertas alcanza un valor determinado(Vp), la salida conmuta rápidamentepasando del nivel alto al nivel bajo.
En las entradas de las compuertasconectamos un divisor de tensión al que apli-camos la señal de audio después de rectifi-cada y filtrada.
Para obtener la tensión necesaria para laconmutación de cada puerta, podemos ele-var la impedancia de la señal a través de unpequeño transformador de salida que tam-bién sirve para aislar el circuito de la fuentede señal de audio (en el circuito de la figura1 no está contemplado dicho transformador yse trata de cualquier transformador de salidade audio, incluso los empleados en las viejas
radios transistorizadas). De esta forma, el nivel enque cada una de las puertas conectadas como inver-sores dispara, pasando del nivel alto hacia el bajo y
Montajes
50 Proyectos Electrónicos
Figura 1
Figura 2
Mont - Vu como medidor.qxd:lx1435.qxd 23/02/14 13:24 Page 50
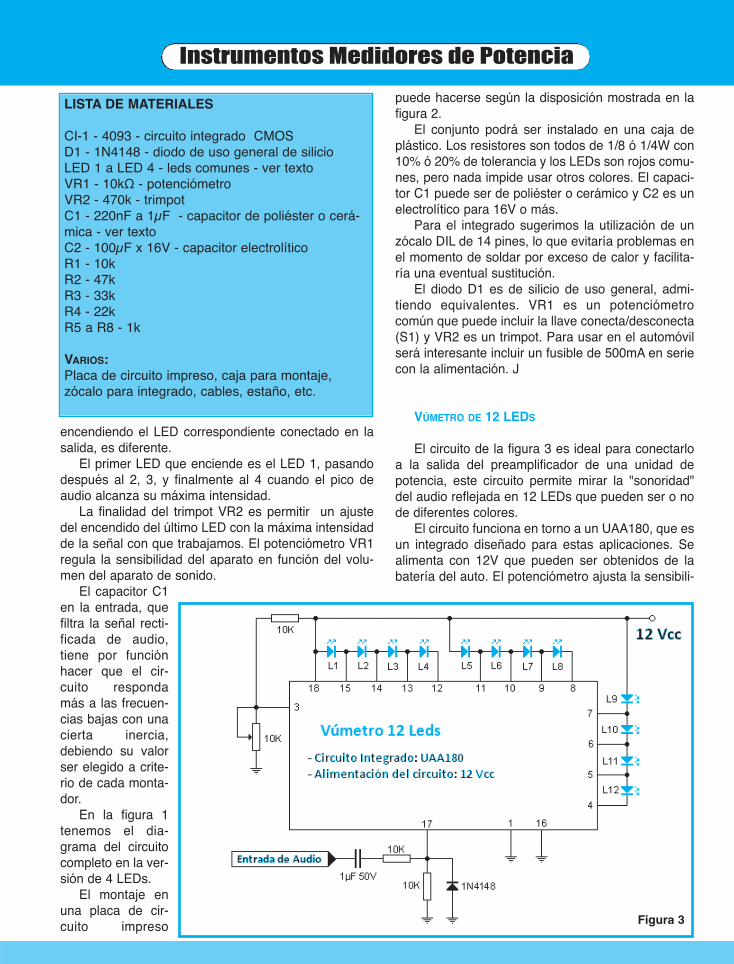
encendiendo el LED correspondiente conectado en lasalida, es diferente.
El primer LED que enciende es el LED 1, pasandodespués al 2, 3, y finalmente al 4 cuando el pico deaudio alcanza su máxima intensidad.
La finalidad del trimpot VR2 es permitir un ajustedel encendido del último LED con la máxima intensidadde la señal con que trabajamos. El potenciómetro VR1regula la sensibilidad del aparato en función del volu-men del aparato de sonido.
El capacitor C1en la entrada, quefiltra la señal recti-ficada de audio,tiene por funciónhacer que el cir-cuito respondamás a las frecuen-cias bajas con unacierta inercia,debiendo su valorser elegido a crite-rio de cada monta-dor.
En la figura 1tenemos el dia-grama del circuitocompleto en la ver-sión de 4 LEDs.
El montaje enuna placa de cir-cuito impreso
puede hacerse según la disposición mostrada en lafigura 2.
El conjunto podrá ser instalado en una caja deplástico. Los resistores son todos de 1/8 ó 1/4W con10% ó 20% de tolerancia y los LEDs son rojos comu-nes, pero nada impide usar otros colores. El capaci-tor C1 puede ser de poliéster o cerámico y C2 es unelectrolítico para 16V o más.
Para el integrado sugerimos la utilización de unzócalo DIL de 14 pines, lo que evitaría problemas enel momento de soldar por exceso de calor y facilita-ría una eventual sustitución.
El diodo D1 es de silicio de uso general, admi-tiendo equivalentes. VR1 es un potenciómetrocomún que puede incluir la llave conecta/desconecta(S1) y VR2 es un trimpot. Para usar en el automóvilserá interesante incluir un fusible de 500mA en seriecon la alimentación. J
Vúmetro de 12 LedS
El circuito de la figura 3 es ideal para conectarloa la salida del preamplificador de una unidad depotencia, este circuito permite mirar la "sonoridad"del audio reflejada en 12 LEDs que pueden ser o node diferentes colores.
El circuito funciona en torno a un UAA180, que esun integrado diseñado para estas aplicaciones. Sealimenta con 12V que pueden ser obtenidos de labatería del auto. El potenciómetro ajusta la sensibili-
Instrumentos Medidores de Potencia
Proyectos Electrónicos 51
LIStA de mAterIALeS
CI-1 - 4093 - circuito integrado CMOSD1 - 1N4148 - diodo de uso general de silicioLED 1 a LED 4 - leds comunes - ver textoVR1 - 10kΩ - potenciómetroVR2 - 470k - trimpotC1 - 220nF a 1µF - capacitor de poliéster o cerá-mica - ver textoC2 - 100µF x 16V - capacitor electrolíticoR1 - 10k R2 - 47k R3 - 33k R4 - 22k R5 a R8 - 1k
VArIoS: Placa de circuito impreso, caja para montaje,zócalo para integrado, cables, estaño, etc.
Figura 3
Mont - Vu como medidor.qxd:lx1435.qxd 23/02/14 13:24 Page 51

dad. La entrada se conecta al parlante actual delestéreo. Abajo se observa la placa de circuitoimpreso del lado de las pistas.
Este esquema está encabezado por el circuitointegrado SIEMENS UAA180 cuyas aplicaciones sondel tipo vúmetro, sensor de nivel, tacómetro, medidorde intensidad de campo, etc.Este integrado poseeuna serie de comparadores internos, que proporcio-nan 12 salidas individuales y escalonadas para laexcitación de LEDs, de acuerdo al nivel de señal deentrada.
Como vemos en el esquema, los LEDs están divi-didos en 3 cuartetos, primer cuarteto conectadodesde el pin 18 al 12, el segundo conectado desde elpin 11 al 8, y el tercero conectado desde el pin 7 al 4.
Por tanto, los LEDs van conectados desde el pin18 al 4, esto quiere decir que la diferencia de voltaje(ΔV) entre los pines 18 y 4 es lo que corresponde ala gama de valores de medida, de volumen en nues-tro caso.
Cuando ΔV18-4 es mayor o igual que 1V, labanda de la luz se desliza suavemente a lo largo dela escala, es decir, encendiendo los LEDs gradual-mente en sentido 18-4.Con el aumento de tensiónde la ΔV18-4, el deslizamiento se vuelve más rápidoe intenso.En el momento en que la ΔV18-4 es apro-ximadamente 4V, se producen los saltos bruscos deluz de un diodo LED a otro.
Para nuestra suerte y simplicidad del circuito, elpropio circuito integrado UAA180, tiene las salidasinternamente limitadas en corriente, lo que nos per-mite evitar el uso de una resistencia limitadora decorriente por cada LED.
El condensador a la entrada de audio, simple-mente realiza una función de desacoplo de la señalde audio para mejor interpretación del circuito inte-grado.
El potenciómetro, se encarga de ajustar la sensi-bilidad de los LEDs, esto significa que para uncorrecto funcionamiento del vúmetro, deberá estarajustado de forma queestén todos los LEDs ilu-minados en el momentoen que el circuito inte-grado recibe los semici-clos con más amplitud dela señal de audio.
El consumo del circuitoen funcionamiento, conLEDs de 10mm, es muybajo, del orden de 100mA.
Este vúmetro esmonofónico y debemos
conectarlo a una salida de audio de un canal para sucorrecto funcionamiento.
Si lo conectamos a una salida de audio estéreo,funcionará, pero se solaparán las señales de audiode los dos canales y el vúmetro funcionaría deacuerdo a la suma de las señales de audio, produ-ciendo que no se distingan bien en la señalizaciónvisual de los LEDs, los bajos, agudos y medios.
Si quisiéramos conectarlo a una salida estéreo yque funcionara perfectamente, tendríamos que reali-zar este circuito por duplicado, y conectar cada unode los circuitos a un canal. Los equipos de audio bási-cos (2 altavoces + subwoofer) son los ideales paraconectar un vúmetro estéreo, ya que conectaríamoscada uno de los circuitos a cada una de las salidas delos parlantes o altavoces.
Otra opción interesante es en lugar de poner unaseñal de audio directa a la entrada, poner un micró-fono. Esto requiere de un pequeño circuito extra parala alimentación del micrófono y la amplificación de laseñal de audio captada por este.
Para medir la potencia de sonido de un orador,ase puede conectar la salida de un micrófono alvúmetro por medio de un preamplificador.
El circuito que he utilizado para la pre-amplifica-ción de un micrófono electret se muestra en la figura4. El circuito original, utilizaba un transistor NPN
2N3904, pero la amplifi-cación era muy pobre, locambié por un transistorcon mucha más gananciaen corriente, como elBC517 y la mejoría fueinstantánea. El regulador de tensiónes para alimentación delcircuito y el micrófono,que puede ser alimen-tado con voltajes desde
3-9 volt. J
Montajes
52 Proyectos Electrónicos
Figura 4
Mont - Vu como medidor.qxd:lx1435.qxd 23/02/14 13:24 Page 52
Proyectos Electrónicos 53
El oído humano no escucha todoslos sonidos al mismo “volumen”,teniendo cierta tendencia a“bajarlo”, o a captar con menosvolumen aquellos sonidos que sonde baja frecuencia, o sea, sonidosgraves (bombo, bajo, etc.) y tam-bién a ciertas frecuencias altas(pero no tanto como las bajas). Lamayoría de los equipos de audiomodulares modernos no incluyencontrol de audibilidad o “loud-ness”. Estos controles son impor-tantes, pues aumentan la gananciade los amplificadores en los extremos de la banda audible, mejorando así la cali-dad de sonido principalmente en la reproducción de música orquestada. Aún aque-llos que poseen control de tonos o ecualizadores suelen producir “sonidos metá-licos”. El proyecto que describimos se puede colocar a la entrada de la señal y“suaviza” la respuesta, produciendo sonidos agradables.
Por: Luis Horacio rodríguez - e-mail: [email protected]
IntroduccIón
En la reproducción, la mayoría de los amplifica-dores tienden simplemente a compensar la maneracómo las frecuencias son reforzadas o atenuadas,llevando una grabación o programa de radio a adqui-rir la forma original que no siempre es la más agra-dable.
La música orquestada, por ejemplo, pierde muchode las notas más bajas y de las más altas si se hacesolamente una compensación natural, o ecualizaciónque la lleve a la forma natural. Si reforzamos un pocomás que lo normal los extremos de la banda de fre-cuencias audibles, la música se vuelve más agrada-ble pues los instrumentos de notas bajas y altaspasan a “aparecer”. Es el caso del violín, del triánguloy de los platillos en el extremo superior de la banda,y del trombón, bombo y tuba en el extremo superiorde la banda, como muestra la figura 1.
La diferencia de “volúmenes” que escuchamos ensonidos de diferente frecuencia se vuelve cada vezmas pequeña mientras más alto escuchemos lamúsica en nuestro sistema de audio. Lo que haceeste “botoncito” de loudness, que antes traían todos
MM onta jeonta je
Controles de sonoridad
Figura 1
Mont-Sonoridad.qxd:lx1435.qxd 23/02/14 13:26 Page 53

los equipos de música y que ahora se asombra si love en un equipo nuevo, es subir un poco el volumenpara esas frecuencias que el oído tiende a bajar.
No se deja siempre accionado porque, como diji-mos, a volúmenes altos este efecto (para nuestrosoídos) tiende a disminuir, lo q significa que siempreque escuchemos música a bajo volumen el controlde loudness debe estar accionado, lo cual nos va agarantizar una verdadera sensación de sonido real yplacentero y vamos a escuchar lo que realmente elartista y productores dejaron plasmado en esa pistade música.
A volúmenes altos de reproducción no hace faltaeste circuito, ya que habría una exageración deamplificación de sonidos de esas frecuencias bajas.
En verdad la sonoridad (que seria que tan alto lopercibimos) depende también de otros factores,como la duración, el timbre, el comportamiento en eltiempo, etc.
controL dE SonorIdAd con cIrcuIto IntEgrAdo
El circuito presentado puede ser intercalado entreel preamplificador con señal de 200 a 500mV desalida y la entrada del amplificador, proporcionandoun refuerzo de hasta 18dB en el extremo inferior dela banda y hasta 8dB en el extremo superior, mante-niendo normal la reproducción entre los 200 y los5000Hz que corresponden a los medios.
Usando solamente un transistor, esta etapa tieneun consumo muy bajo y puede aprovechar la propiafuente del amplificador, siempre que la misma poseauna tensión entre 18 y 22V. La placa para este con-trol puede separarse o incluirse en el diseño del pro-
pio amplificador. Las características son las siguien-tes:
Tensión de alimentación ±15V
Refuerzo graves: 15dB en 80Hz (máx)
Refuerzo agudos: 8dB en 15kHz (máx)
Corriente de alimentación: 2mA (tip)
Impedancia de entrada: 22kΩ
Nivel de señal de entrada: 200 a 500mV
El prototipo se trata de un control formado poruna red dependiente de la frecuencia, colocada enparalelo con el control de volumen, que da más ate-nuación en frecuencias medias que en bajas y altas.
En el diagrama de la figura 2 vemos un sistemaactivo de la red mencionada dependiente de la fre-cuencia. Está formado por un buffer de entrada con-formado por un amplificador operacional (IC1a) y unamplificador sumador (IC1b), al que llegan dos seña-les.
Una de las señales que llega al sumador lo hacepor el canal compuesto por el control de volumen P1y R6, elementos que poseen una red “shunt” correc-tora de frecuencia formada por C1-C2 y R2-R5.
La red amplifica las señales de bajas frecuenciasde hasta 20Hz, en un valor máximo de 24dB mientrasque las señales de alta frecuencia de hasta 20kHzson amplificadas con un máximo de 8dB.
La relación R3/R4 determina la máxima amplifica-ción de las señales de tono grave, y el valor de C2 dala frecuencia de corte. La resistencia R2 tiene la fun-ción de asegurar que no se lleve a cabo ningunaamplificación a frecuencias por encima de 20kHz.
Como consecuencia de la red correctora no sepuede reducir el volumen completamente, ocasionará
Montajes
54 Proyectos Electrónicos
Figura 2
Mont-Sonoridad.qxd:lx1435.qxd 23/02/14 13:26 Page 54
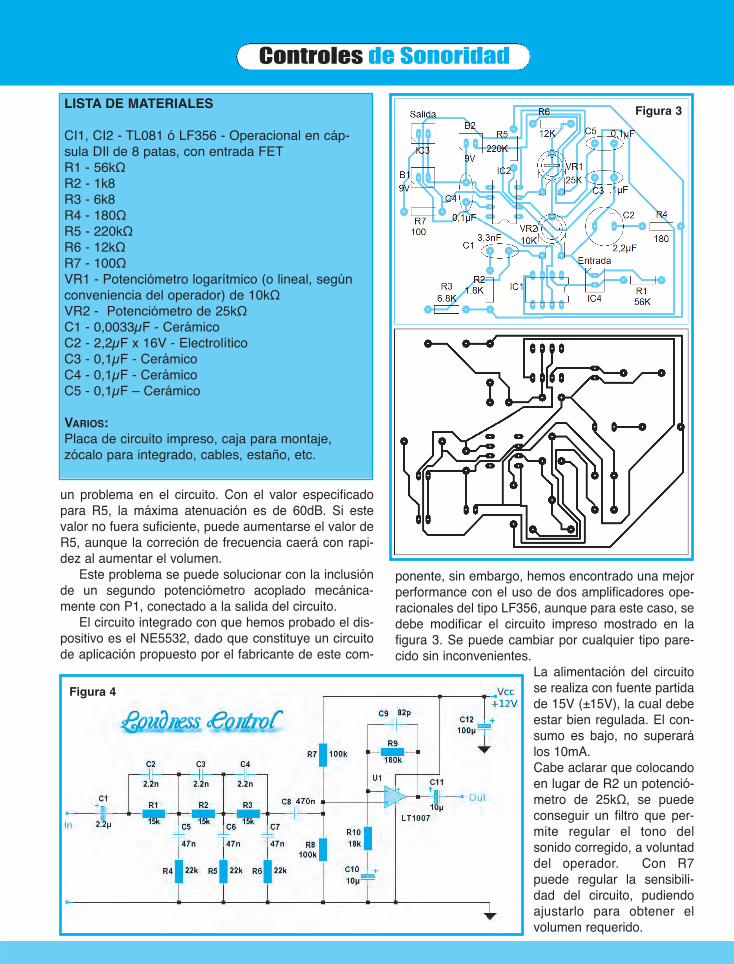
un problema en el circuito. Con el valor especificadopara R5, la máxima atenuación es de 60dB. Si estevalor no fuera suficiente, puede aumentarse el valor deR5, aunque la correción de frecuencia caerá con rapi-dez al aumentar el volumen.
Este problema se puede solucionar con la inclusiónde un segundo potenciómetro acoplado mecánica-mente con P1, conectado a la salida del circuito.
El circuito integrado con que hemos probado el dis-positivo es el NE5532, dado que constituye un circuitode aplicación propuesto por el fabricante de este com-
ponente, sin embargo, hemos encontrado una mejorperformance con el uso de dos amplificadores ope-racionales del tipo LF356, aunque para este caso, sedebe modificar el circuito impreso mostrado en lafigura 3. Se puede cambiar por cualquier tipo pare-cido sin inconvenientes.
La alimentación del circuitose realiza con fuente partidade 15V (±15V), la cual debeestar bien regulada. El con-sumo es bajo, no superarálos 10mA.Cabe aclarar que colocandoen lugar de R2 un potenció-metro de 25kΩ, se puedeconseguir un filtro que per-mite regular el tono delsonido corregido, a voluntaddel operador. Con R7puede regular la sensibili-dad del circuito, pudiendoajustarlo para obtener elvolumen requerido.
Controles de Sonoridad
Proyectos Electrónicos 55
Figura 3LIStA dE MAtErIALES
CI1, CI2 - TL081 ó LF356 - Operacional en cáp-sula DIl de 8 patas, con entrada FETR1 - 56kΩR2 - 1k8R3 - 6k8R4 - 180ΩR5 - 220kΩR6 - 12kΩR7 - 100ΩVR1 - Potenciómetro logarítmico (o lineal, segúnconveniencia del operador) de 10kΩVR2 - Potenciómetro de 25kΩC1 - 0,0033µF - CerámicoC2 - 2,2µF x 16V - ElectrolíticoC3 - 0,1µF - CerámicoC4 - 0,1µF - CerámicoC5 - 0,1µF – Cerámico
VArIoS: Placa de circuito impreso, caja para montaje,zócalo para integrado, cables, estaño, etc.
Figura 4
Mont-Sonoridad.qxd:lx1435.qxd 23/02/14 13:26 Page 55
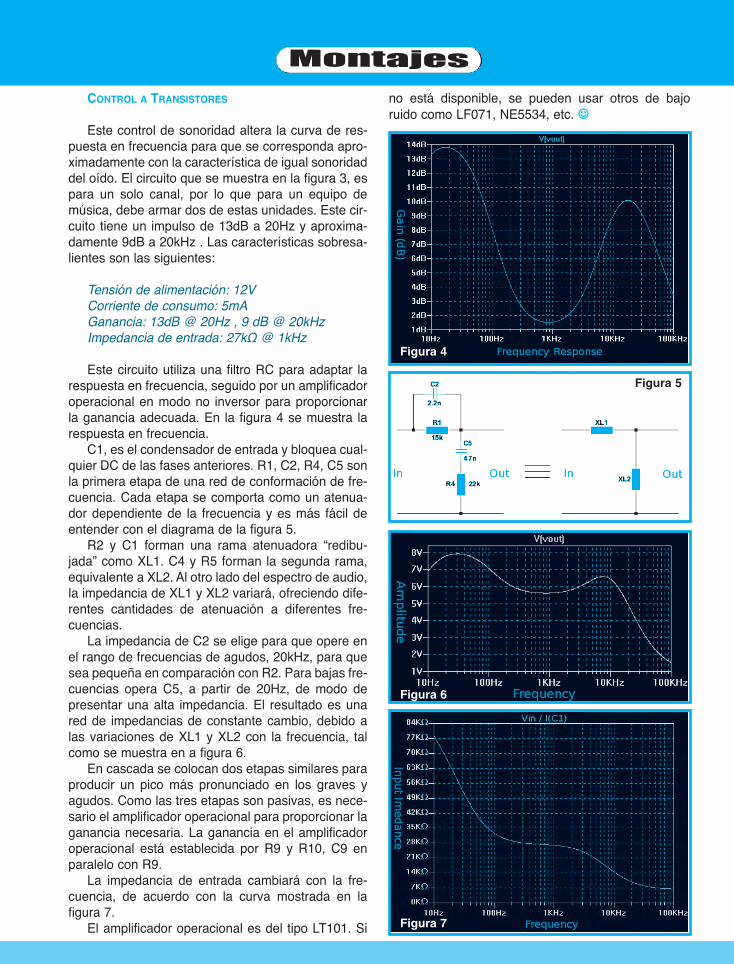
controL A trAnSIStorES
Este control de sonoridad altera la curva de res-puesta en frecuencia para que se corresponda apro-ximadamente con la característica de igual sonoridaddel oído. El circuito que se muestra en la figura 3, espara un solo canal, por lo que para un equipo demúsica, debe armar dos de estas unidades. Este cir-cuito tiene un impulso de 13dB a 20Hz y aproxima-damente 9dB a 20kHz . Las características sobresa-lientes son las siguientes:
Tensión de alimentación: 12V
Corriente de consumo: 5mA
Ganancia: 13dB @ 20Hz , 9 dB @ 20kHz
Impedancia de entrada: 27kΩ @ 1kHz
Este circuito utiliza una filtro RC para adaptar larespuesta en frecuencia, seguido por un amplificadoroperacional en modo no inversor para proporcionarla ganancia adecuada. En la figura 4 se muestra larespuesta en frecuencia.
C1, es el condensador de entrada y bloquea cual-quier DC de las fases anteriores. R1, C2, R4, C5 sonla primera etapa de una red de conformación de fre-cuencia. Cada etapa se comporta como un atenua-dor dependiente de la frecuencia y es más fácil deentender con el diagrama de la figura 5.
R2 y C1 forman una rama atenuadora “redibu-jada” como XL1. C4 y R5 forman la segunda rama,equivalente a XL2. Al otro lado del espectro de audio,la impedancia de XL1 y XL2 variará, ofreciendo dife-rentes cantidades de atenuación a diferentes fre-cuencias.
La impedancia de C2 se elige para que opere enel rango de frecuencias de agudos, 20kHz, para quesea pequeña en comparación con R2. Para bajas fre-cuencias opera C5, a partir de 20Hz, de modo depresentar una alta impedancia. El resultado es unared de impedancias de constante cambio, debido alas variaciones de XL1 y XL2 con la frecuencia, talcomo se muestra en a figura 6.
En cascada se colocan dos etapas similares paraproducir un pico más pronunciado en los graves yagudos. Como las tres etapas son pasivas, es nece-sario el amplificador operacional para proporcionar laganancia necesaria. La ganancia en el amplificadoroperacional está establecida por R9 y R10, C9 enparalelo con R9.
La impedancia de entrada cambiará con la fre-cuencia, de acuerdo con la curva mostrada en lafigura 7.
El amplificador operacional es del tipo LT101. Si
no está disponible, se pueden usar otros de bajo
ruido como LF071, NE5534, etc. J
Montajes
56 Proyectos Electrónicos
Figura 4
Figura 5
Figura 7
Figura 6
Mont-Sonoridad.qxd:lx1435.qxd 23/02/14 13:26 Page 56
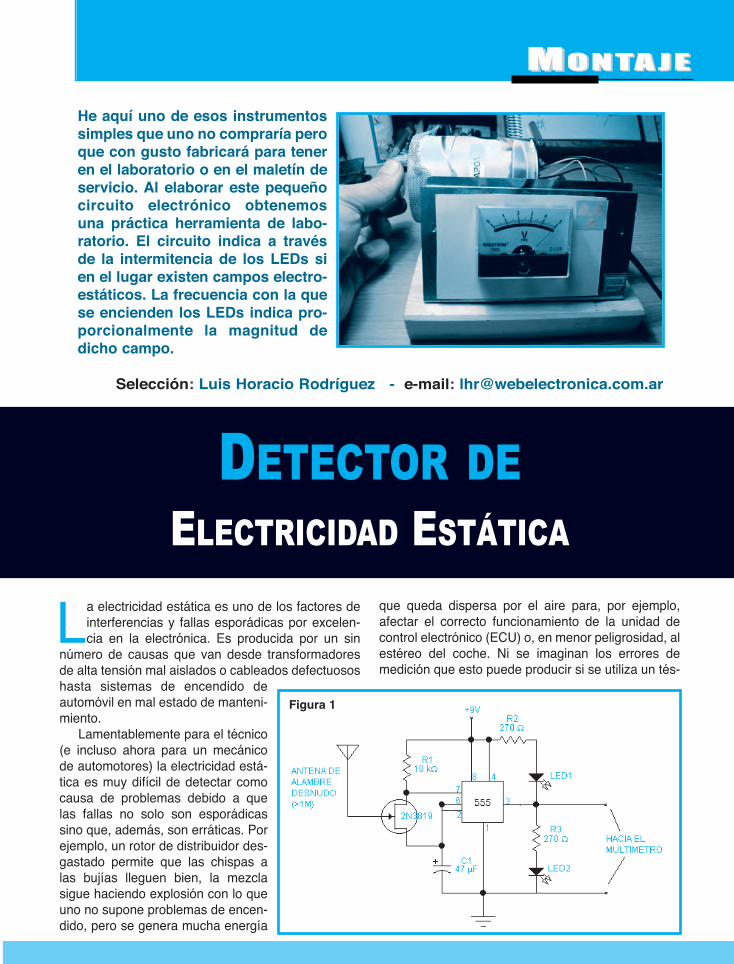
Proyectos Electrónicos 57
He aquí uno de esos instrumentossimples que uno no compraría peroque con gusto fabricará para teneren el laboratorio o en el maletín deservicio. Al elaborar este pequeñocircuito electrónico obtenemosuna práctica herramienta de labo-ratorio. El circuito indica a travésde la intermitencia de los LEDs sien el lugar existen campos electro-estáticos. La frecuencia con la quese encienden los LEDs indica pro-porcionalmente la magnitud dedicho campo.
Selección: Luis Horacio Rodríguez - e-mail: [email protected]
La electricidad estática es uno de los factores deinterferencias y fallas esporádicas por excelen-cia en la electrónica. Es producida por un sin
número de causas que van desde transformadoresde alta tensión mal aislados o cableados defectuososhasta sistemas de encendido deautomóvil en mal estado de manteni-miento.
Lamentablemente para el técnico(e incluso ahora para un mecánicode automotores) la electricidad está-tica es muy difícil de detectar comocausa de problemas debido a quelas fallas no solo son esporádicassino que, además, son erráticas. Porejemplo, un rotor de distribuidor des-gastado permite que las chispas alas bujías lleguen bien, la mezclasigue haciendo explosión con lo queuno no supone problemas de encen-dido, pero se genera mucha energía
que queda dispersa por el aire para, por ejemplo,afectar el correcto funcionamiento de la unidad decontrol electrónico (ECU) o, en menor peligrosidad, alestéreo del coche. Ni se imaginan los errores demedición que esto puede producir si se utiliza un tés-
MMontajeontaje
Detector De
electriciDaD estática
Figura 1
Mont - Estatica.qxd:lx1435.qxd 23/02/14 13:27 Page 57
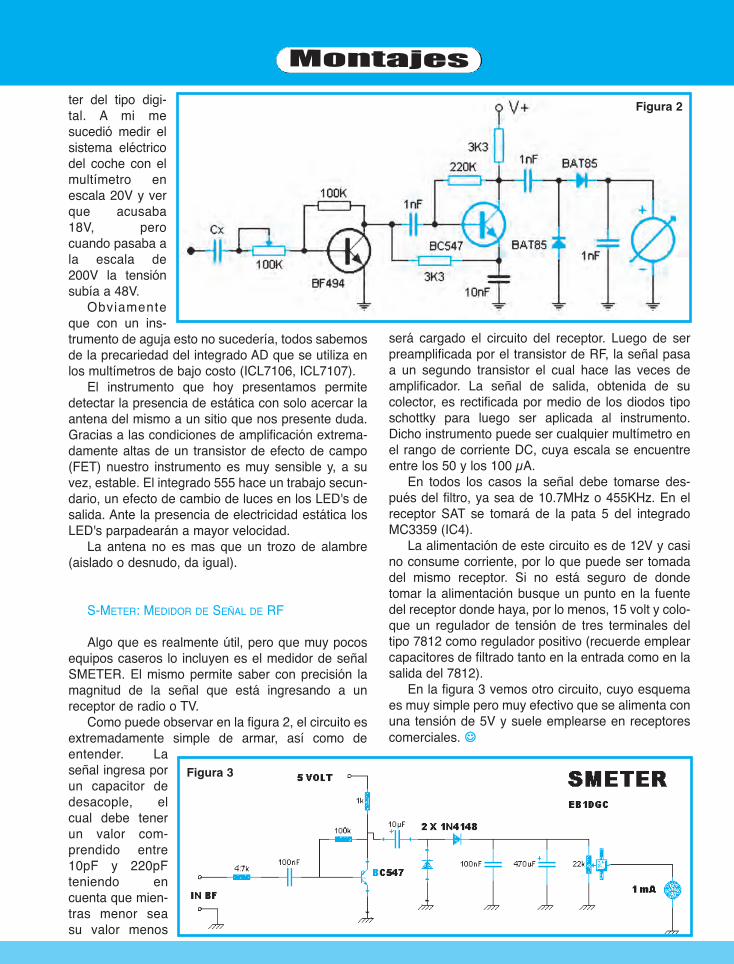
ter del tipo digi-tal. A mi mesucedió medir elsistema eléctricodel coche con elmultímetro enescala 20V y verque acusaba18V, perocuando pasaba ala escala de200V la tensiónsubía a 48V.
Obviamenteque con un ins-trumento de aguja esto no sucedería, todos sabemosde la precariedad del integrado AD que se utiliza enlos multímetros de bajo costo (ICL7106, ICL7107).
El instrumento que hoy presentamos permitedetectar la presencia de estática con solo acercar laantena del mismo a un sitio que nos presente duda.Gracias a las condiciones de amplificación extrema-damente altas de un transistor de efecto de campo(FET) nuestro instrumento es muy sensible y, a suvez, estable. El integrado 555 hace un trabajo secun-dario, un efecto de cambio de luces en los LED's desalida. Ante la presencia de electricidad estática losLED's parpadearán a mayor velocidad.
La antena no es mas que un trozo de alambre(aislado o desnudo, da igual).
S-METER: MEDIDOR DE SEñAL DE RF
Algo que es realmente útil, pero que muy pocosequipos caseros lo incluyen es el medidor de señalSMETER. El mismo permite saber con precisión lamagnitud de la señal que está ingresando a unreceptor de radio o TV.
Como puede observar en la figura 2, el circuito esextremadamente simple de armar, así como deentender. Laseñal ingresa porun capacitor dedesacople, elcual debe tenerun valor com-prendido entre10pF y 220pFteniendo encuenta que mien-tras menor seasu valor menos
será cargado el circuito del receptor. Luego de serpreamplificada por el transistor de RF, la señal pasaa un segundo transistor el cual hace las veces deamplificador. La señal de salida, obtenida de sucolector, es rectificada por medio de los diodos tiposchottky para luego ser aplicada al instrumento.Dicho instrumento puede ser cualquier multímetro enel rango de corriente DC, cuya escala se encuentreentre los 50 y los 100 µA.
En todos los casos la señal debe tomarse des-pués del filtro, ya sea de 10.7MHz o 455KHz. En elreceptor SAT se tomará de la pata 5 del integradoMC3359 (IC4).
La alimentación de este circuito es de 12V y casino consume corriente, por lo que puede ser tomadadel mismo receptor. Si no está seguro de dondetomar la alimentación busque un punto en la fuentedel receptor donde haya, por lo menos, 15 volt y colo-que un regulador de tensión de tres terminales deltipo 7812 como regulador positivo (recuerde emplearcapacitores de filtrado tanto en la entrada como en lasalida del 7812).
En la figura 3 vemos otro circuito, cuyo esquemaes muy simple pero muy efectivo que se alimenta conuna tensión de 5V y suele emplearse en receptorescomerciales. J
Montajes
58 Proyectos Electrónicos
Figura 2
Figura 3
Mont - Estatica.qxd:lx1435.qxd 23/02/14 13:27 Page 58
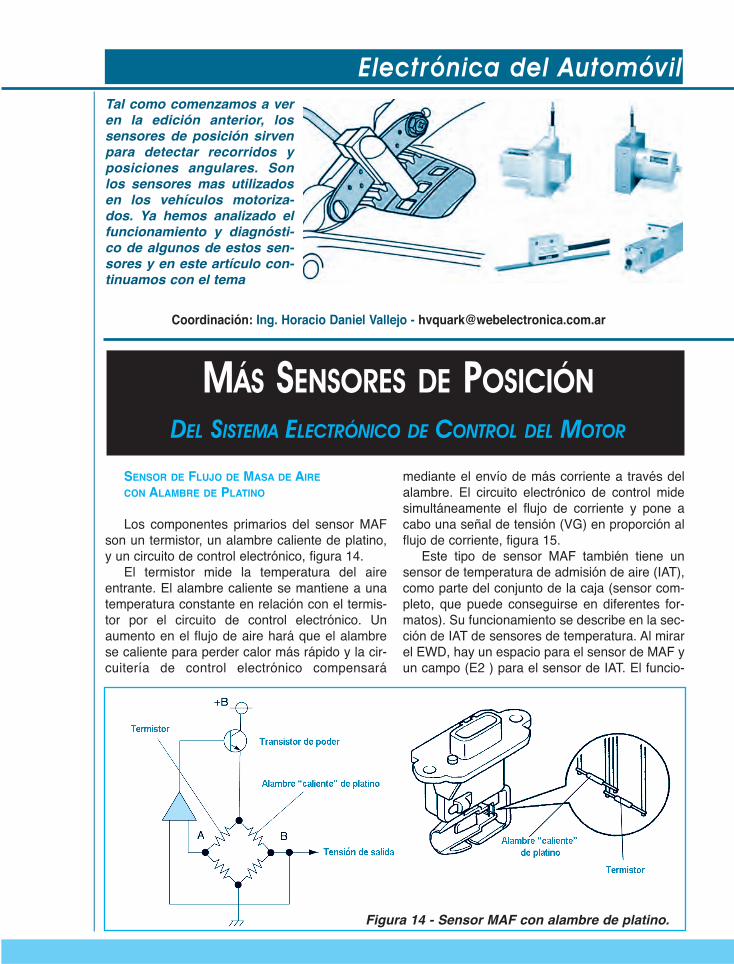
SenSor De Flujo De MaSa De aIre
Con alaMbre De PlatIno
Los componentes primarios del sensor MAFson un termistor, un alambre caliente de platino,y un circuito de control electrónico, figura 14.
El termistor mide la temperatura del aireentrante. El alambre caliente se mantiene a unatemperatura constante en relación con el termis-tor por el circuito de control electrónico. Unaumento en el flujo de aire hará que el alambrese caliente para perder calor más rápido y la cir-cuitería de control electrónico compensará
mediante el envío de más corriente a través delalambre. El circuito electrónico de control midesimultáneamente el flujo de corriente y pone acabo una señal de tensión (VG) en proporción alflujo de corriente, figura 15.
Este tipo de sensor MAF también tiene unsensor de temperatura de admisión de aire (IAT),como parte del conjunto de la caja (sensor com-pleto, que puede conseguirse en diferentes for-matos). Su funcionamiento se describe en la sec-ción de IAT de sensores de temperatura. Al mirarel EWD, hay un espacio para el sensor de MAF yun campo (E2 ) para el sensor de IAT. El funcio-
Electrónica del Automóvil 59
electrónica del automóvil
Más sensores de PosiciónDel SiStema electrónico De control Del motor
Tal como comenzamos a ver
en la edición anterior, los
sensores de posición sirven
para detectar recorridos y
posiciones angulares. Son
los sensores mas utilizados
en los vehículos motoriza-
dos. Ya hemos analizado el
funcionamiento y diagnósti-
co de algunos de estos sen-
sores y en este artículo con-
tinuamos con el tema
Coordinación: Ing. Horacio Daniel Vallejo - [email protected]
Figura 14 - Sensor MAF con alambre de platino.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 59
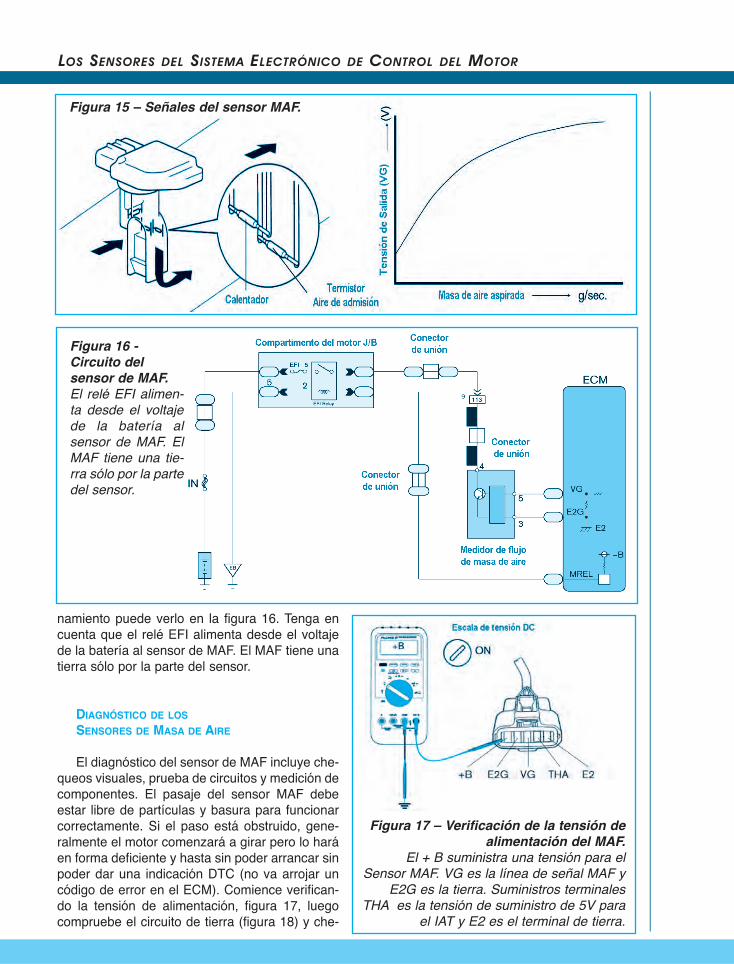
namiento puede verlo en la figura 16. Tenga encuenta que el relé EFI alimenta desde el voltajede la batería al sensor de MAF. El MAF tiene unatierra sólo por la parte del sensor.
DIagnóStICo De loS
SenSoreS De MaSa De aIre
El diagnóstico del sensor de MAF incluye che-queos visuales, prueba de circuitos y medición decomponentes. El pasaje del sensor MAF debeestar libre de partículas y basura para funcionarcorrectamente. Si el paso está obstruido, gene-ralmente el motor comenzará a girar pero lo haráen forma deficiente y hasta sin poder arrancar sinpoder dar una indicación DTC (no va arrojar uncódigo de error en el ECM). Comience verifican-do la tensión de alimentación, figura 17, luegocompruebe el circuito de tierra (figura 18) y che-
loS SenSoreS Del SiStema electrónico De control Del motor
60 Electrónica del Automóvil
Figura 16 -
Circuito del
sensor de MAF.
El relé EFI alimen-
ta desde el voltaje
de la batería al
sensor de MAF. El
MAF tiene una tie-
rra sólo por la parte
del sensor.
Figura 17 – Verificación de la tensión de
alimentación del MAF.
El + B suministra una tensión para el
Sensor MAF. VG es la línea de señal MAF y
E2G es la tierra. Suministros terminales
THA es la tensión de suministro de 5V para
el IAT y E2 es el terminal de tierra.
Figura 15 – Señales del sensor MAF.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 60

quee el correcto funcionamiento del sensor comose sugiere en la figura 19. El + B suministra unatensión para el Sensor MAF. VG es la línea deseñal MAF y E2G es la tierra. Suministros termi-nales THA es la tensión de suministro de 5V parael IAT y E2 es el terminal de tierra. La comproba-ción del circuito de tierra del MAF se realiza conun medidor de resistencia. Debe verificar queE2G tenga 0Ω respecto del chasis.
La mayoría de los sensores MAF se puedencomprobar mediante el suministro de energía yuna señal de tierra colocados en los terminalesadecuados. Debe colocar un voltímetro entre VGy tierra y ver cómo varía la tensión cuando sesopla (aire) sobre la entrada del sensor.
MeDIDor De Flujo De aIre De PaletaS
El medidor de flujo de aire de paletas propor-ciona al ECM una medida exacta de la cargacolocada en el motor. El ECM utiliza este dato
para calcular la duración de la inyección básicade combustible (mezcla) y el ángulo de avancepara el encendido. Medidores de Flujo de Aire depaletas (figura 20) constan de los siguientes com-ponentes:
• Placa de medición.
• Placa de compensación.
• Retorno por muelle.
• Potenciómetro.
• Pasaje para derivación de aire.
• Tornillo de ajuste de ralentí (ajustado en
fábrica).
• Interruptor de la bomba de combustible .
• Sensor de temperatura del aire (IAT).
En la figura 21 puede ver cómo funciona elmedidor de paletas. La placa de medición se des-vía en proporción al volumen de flujo de aire deadmisión. La cámara de amortiguación ayuda areducir el movimiento rápido de la placa de medi-ción.
SenSoreS De PoSición
Electrónica del Automóvil 61
Figura 18 - Circuito de
tierra del MAF.
La comprobación del cir-
cuito de tierra del MAF
se realiza con un medi-
dor de resistencia. Debe
verificar que E2G tenga
0Ω respecto del chasis.
Figura 19 - Comprobación de
MAF Operación.
La mayoría de los sensores
MAF se pueden comprobar
mediante el suministro de ener-
gía y una señal de tierra colo-
cados en los terminales ade-
cuados. Debe colocar un voltí-
metro entre VG y tierra y ver
cómo varía la tensión cuando
se sopla (aire) sobre la entrada
del sensor.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 61

Durante el funcionamiento del motor, el flujode aire de admisión reacciona contra la placa demedición (y muelle de retorno) y desvía la placaen proporción al volumen de flujo de aire quepasa a la placa. Una placa de compensación(que está unida a la placa de medición) se
encuentra dentro de una cámara de amortigua-ción y actúa como un "amortiguador " para evitarel movimiento rápido o la vibración de la placa demedición.
El movimiento de la placa de medición setransfiere a través de un eje a una corredera
loS SenSoreS Del SiStema electrónico De control Del motor
62 Electrónica del Automóvil
Figura 20 - Medidor de flujo de aire de paletas.
Figura 21 – Operación
del medidor de
flujo de aire de paletas.
El flujo de aire de admisión
reacciona contra la placa
de medición y desvía la
placa en proporción al volu-
men de flujo de aire que
pasa a la placa. Dentro de
una cámara de amortigua-
ción hay una placa de com-
pensación, que está unida
a la placa de medición y
actúa como un "amortigua-
dor " para evitar el movi-
miento rápido o la vibración
de la placa de medición.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 62
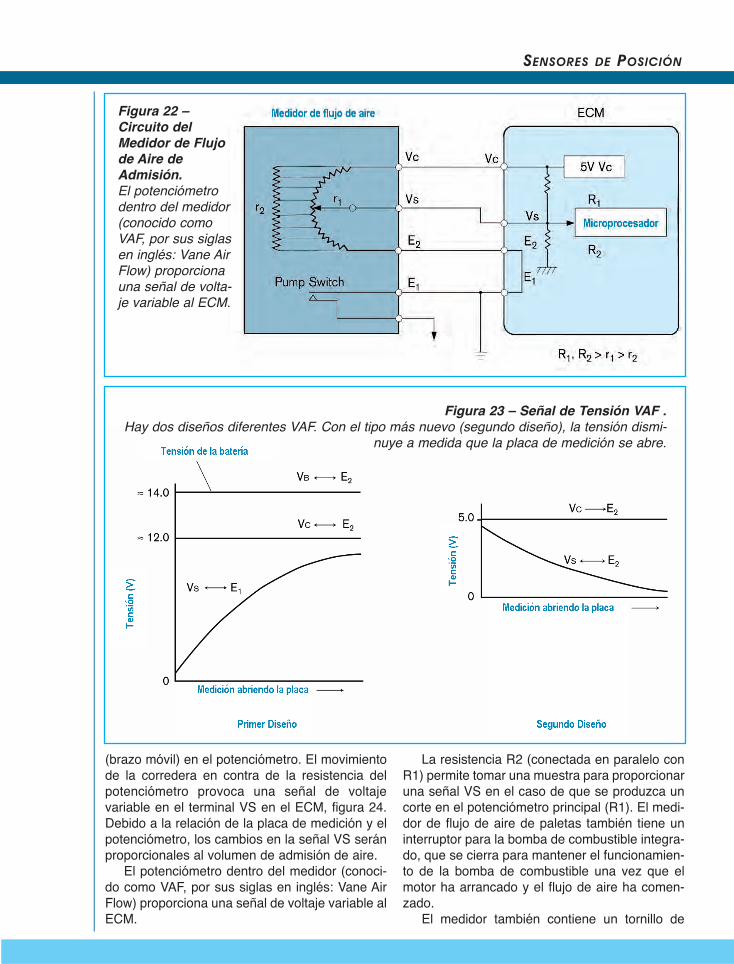
(brazo móvil) en el potenciómetro. El movimientode la corredera en contra de la resistencia delpotenciómetro provoca una señal de voltajevariable en el terminal VS en el ECM, figura 24.Debido a la relación de la placa de medición y elpotenciómetro, los cambios en la señal VS seránproporcionales al volumen de admisión de aire.
El potenciómetro dentro del medidor (conoci-do como VAF, por sus siglas en inglés: Vane AirFlow) proporciona una señal de voltaje variable alECM.
La resistencia R2 (conectada en paralelo conR1) permite tomar una muestra para proporcionaruna señal VS en el caso de que se produzca uncorte en el potenciómetro principal (R1). El medi-dor de flujo de aire de paletas también tiene uninterruptor para la bomba de combustible integra-do, que se cierra para mantener el funcionamien-to de la bomba de combustible una vez que elmotor ha arrancado y el flujo de aire ha comen-zado.
El medidor también contiene un tornillo de
SenSoreS De PoSición
Electrónica del Automóvil 63
Figura 22 –
Circuito del
Medidor de Flujo
de Aire de
Admisión.
El potenciómetro
dentro del medidor
(conocido como
VAF, por sus siglas
en inglés: Vane Air
Flow) proporciona
una señal de volta-
je variable al ECM.
Figura 23 – Señal de Tensión VAF .
Hay dos diseños diferentes VAF. Con el tipo más nuevo (segundo diseño), la tensión dismi-
nuye a medida que la placa de medición se abre.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 63

ajuste de ralentí, ajustado de fábrica, que estácubierto por un tapón a prueba de manipulacio-nes. El manual de reparación no proporciona pro-cedimientos acerca del restablecimiento de estetornillo en los casos en que ha sido manipulado.
tIPoS De MeDIDoreS VaF
Hay dos tipos principales de medidores VAF.El primer diseño es el tipo más antiguo. Se utilizavoltaje de la batería para la tensión de alimenta-ción. Con este tipo de VAF, cuando la placa demedición se abre, la señal de tensión aumenta,
tal como se desprende de la figura 23. Hay dosdiseños diferentes de sensores de flujo de aire(VAF), y por eso se muestran dos gráficas. Con eltipo más nuevo (segundo diseño), la tensión dis-minuye a medida que la placa de medición seabre.
Como puede apreciar, “hay mucho parahablar y discutir” sobre este tipo de sensores, espor eso que en el CD: “Los Sensores del
Sistema Electrónico del Automóvil” que puededescargar desde nuestra web: www.webelectro-nica.com.ar, haciendo clic en el ícono password
e ingresando la clave: sensoauto. J
loS SenSoreS Del SiStema electrónico De control Del motor
64 Electrónica del Automóvil
Figura 24 - Karman Vortex
Medidor de flujo de aire.
Utiliza un espejo móvil y el
fototransistor para medir el
flujo de aire de admisión.
Este tipo de metro opera sin
restringir el flujo de aire.
Ele Auto - Sensores Pos 2.qxd:*Cap 4 - telefonia 23/02/14 13:31 Page 64
Saber Electrónica Nº 319 65
EdicionarGEntinanº169octUbrE2014
directorIng.HoracioD.Vallejo
redacciónGrupoQuarkSRL
JefedeProducciónJoséMariaNieves(GrupoQuarkSRL)
StaffAlejandroVallejo
LilianaVallejo
FabianAlejandroNieves
GrupoQuarkSRL
PublicidadAlejandroVallejo
EditorialQuarkSRL(4301-8804)
WebManager-club[email protected]
distribución:capital: CarlosCancellaroeHijosSH,Guten-berg3258-Cap.interior:DistribuidoraBertránS.A.C.,Av.VélezSársfield1950-Cap.Fed.
Uruguay:RODESOL: Ciudadela 1416 -
Montevideo.
impresión: I mp r e s i o n e s B a r r a c a s . C a p . F e d . B s . A s .
La Edi to rial no se res pon sa bi li za por el con te ni do de las no tas fir ma -
das. To dos los pro duc tos o mar cas que se men cio nan son a los efec -
tos de pres tar un ser vi cio al lec tor, y no en tra ñan res pon sa bi li dad de
nues tra par te. Es tá pro hi bi da la re pro duc ción to tal o par cial del ma te -
rial con te ni do en es ta re vis ta, así co mo la in dus tria li za ción y/o co mer -
cia li za ción de los apa ra tos o ideas que apa re cen en los men cio na dos
tex tos, ba jo pe na de san cio nes le ga les, sal vo me dian te au to ri za ción
por es cri to de la Edi to rial.
EditorialQUarKS.r.l.
Propietariadelosderechosen
castellanodelapublicaciónmensual
SabErElEctrónica
GrupoQuarkSRLSanRicardo2072,CapitalFe-
deral(1273)TEL.(005411)4301-8804
Pags65y66:ArtTapa23/02/1413:34Page65

Pags65y66:ArtTapa23/02/1413:34Page66
Proyectos Electrónicos 67
IntroduccIón
Hace unos meses, Editorial Quark desarrolló tres Paquetes Educativos sobre ARDUINO; en los quese incluyen kits y componentes para realizar sus propias prácticas. Si Ud. adquirió el Paquete Educativo:“Desarrollos con Arduino”, tenga en cuenta que no se proveen los componentes de la fuente de ali-mentación y tampoco la placa adaptadora para conexión a USB, es decir, podrá conectar la placa a unpuerto COM de su computadora.
AA rtículortículo dede ttApAApA
KIT ArduIno onBoArd ATmegA 328
ConsTruyendo un ArduIno
soBre un ProToBoArd
En los últimos años se han desarrollado innumerables aplicaciones en las que es necesario
contar con los conocimientos básicos en el desarrollo y programación de microcontroladores.
La mayoría de los sistemas programables actuales tienen por lo menos un microcontrolador
encargado del control operativo del sistema. Existen en el mercado muchos fabricantes de
microcontroladores, por mencionar algunos: MICROCHIP, ATMEGA, MOTOROLA entre otras.
Estos fabricantes proveen del software especializado para la programación de sus microcon-
troladores y otorgan gran cantidad de información para el usuario. Actualmente, ARDUINO, una
empresa italiana, ha desarrollado placas microcontroladas educativas con grandes prestacio-
nes. Esta placa posee microcontroladores ATMEGA encargados del control de la placa. Hay
disponibles gran cantidad de proyectos que se han desarrollado a través de esta noble
interfaz. En el Artículo de tapa de esta edición le indicamos cómo armar una placa ARDUINO
con circuito impreso, en este tutorial mostramos como puede hacer un montaje compatible con
Arduino, sobre una placa entrenadora, con un microcontrolador ATmel Atmega8/168/328 de
AVR y una placa adaptadora FTDI FT232.También puedes necesitar un Arduino Mini USB para
cargar en el micro el archivo de bootloader para que el proyecto reconozca el IDE de Arduino.
Autor: Federico Prado - e-mail: [email protected]
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 67
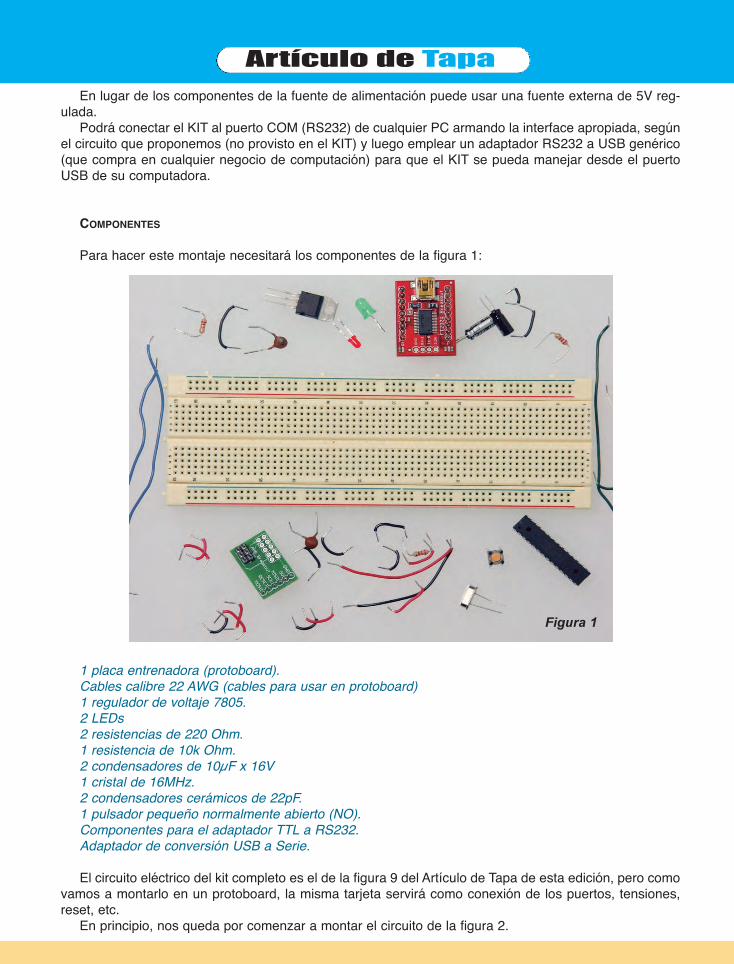
Artículo de tapa
68 Microcontroladores
En lugar de los componentes de la fuente de alimentación puede usar una fuente externa de 5V reg-ulada.
Podrá conectar el KIT al puerto COM (RS232) de cualquier PC armando la interface apropiada, segúnel circuito que proponemos (no provisto en el KIT) y luego emplear un adaptador RS232 a USB genérico(que compra en cualquier negocio de computación) para que el KIT se pueda manejar desde el puertoUSB de su computadora.
comPonEntEs
Para hacer este montaje necesitará los componentes de la figura 1:
1 placa entrenadora (protoboard).Cables calibre 22 AWG (cables para usar en protoboard)1 regulador de voltaje 7805.2 LEDs2 resistencias de 220 Ohm.1 resistencia de 10k Ohm.2 condensadores de 10µF x 16V1 cristal de 16MHz.2 condensadores cerámicos de 22pF.1 pulsador pequeño normalmente abierto (NO).Componentes para el adaptador TTL a RS232.Adaptador de conversión USB a Serie.
El circuito eléctrico del kit completo es el de la figura 9 del Artículo de Tapa de esta edición, pero comovamos a montarlo en un protoboard, la misma tarjeta servirá como conexión de los puertos, tensiones,reset, etc.
En principio, nos queda por comenzar a montar el circuito de la figura 2.
Figura 1
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 68
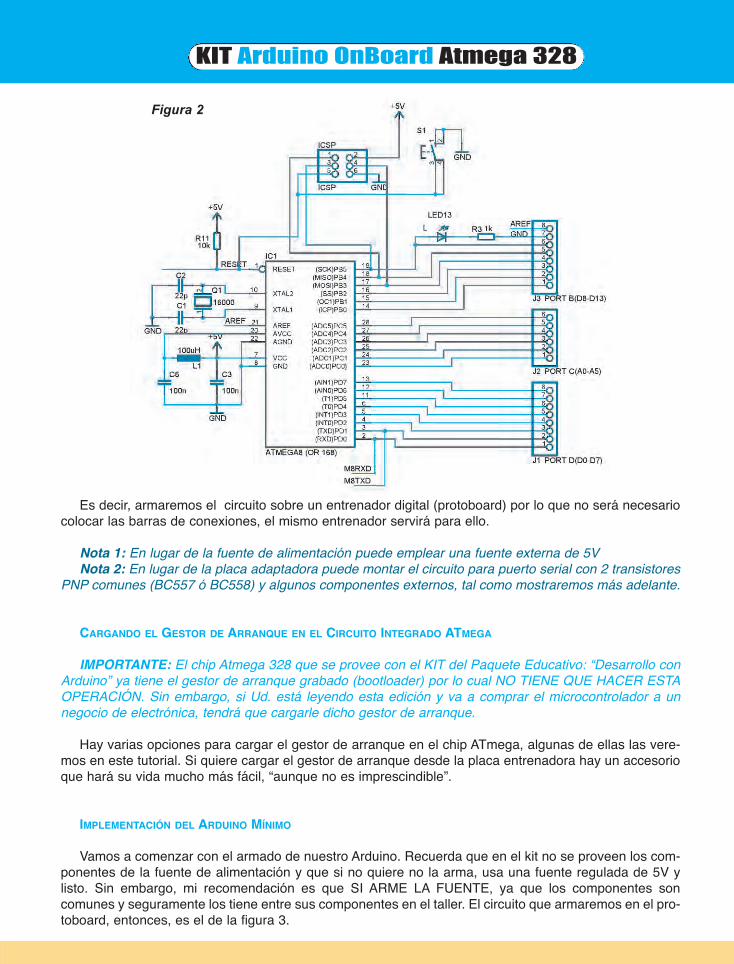
KIt Arduino onBoard Atmega 328
Proyectos Electrónicos 69
Es decir, armaremos el circuito sobre un entrenador digital (protoboard) por lo que no será necesariocolocar las barras de conexiones, el mismo entrenador servirá para ello.
Nota 1: En lugar de la fuente de alimentación puede emplear una fuente externa de 5VNota 2: En lugar de la placa adaptadora puede montar el circuito para puerto serial con 2 transistores
PNP comunes (BC557 ó BC558) y algunos componentes externos, tal como mostraremos más adelante.
cArgAndo El gEstor dE ArrAnQuE En El cIrcuIto IntEgrAdo AtmEgA
IMPORTANTE: El chip Atmega 328 que se provee con el KIT del Paquete Educativo: “Desarrollo conArduino” ya tiene el gestor de arranque grabado (bootloader) por lo cual NO TIENE QUE HACER ESTAOPERACIÓN. Sin embargo, si Ud. está leyendo esta edición y va a comprar el microcontrolador a unnegocio de electrónica, tendrá que cargarle dicho gestor de arranque.
Hay varias opciones para cargar el gestor de arranque en el chip ATmega, algunas de ellas las vere-mos en este tutorial. Si quiere cargar el gestor de arranque desde la placa entrenadora hay un accesorioque hará su vida mucho más fácil, “aunque no es imprescindible”.
ImPlEmEntAcIón dEl ArduIno mínImo
Vamos a comenzar con el armado de nuestro Arduino. Recuerda que en el kit no se proveen los com-ponentes de la fuente de alimentación y que si no quiere no la arma, usa una fuente regulada de 5V ylisto. Sin embargo, mi recomendación es que SI ARME LA FUENTE, ya que los componentes soncomunes y seguramente los tiene entre sus componentes en el taller. El circuito que armaremos en el pro-toboard, entonces, es el de la figura 3.
Figura 2
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 69
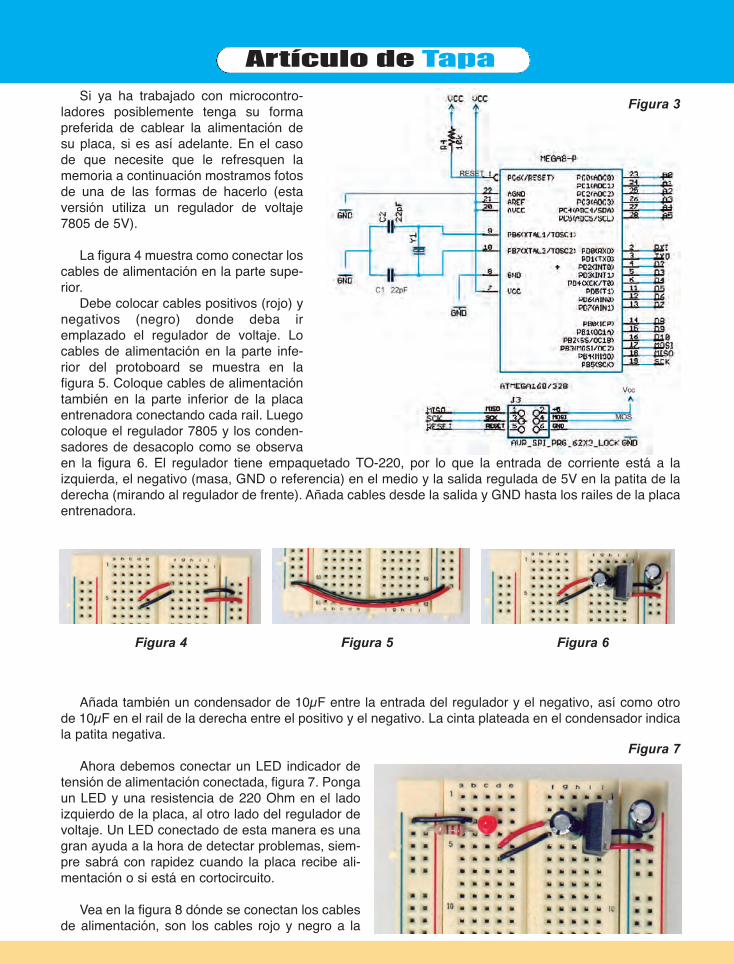
Artículo de tapa
70 Microcontroladores
Si ya ha trabajado con microcontro-ladores posiblemente tenga su formapreferida de cablear la alimentación desu placa, si es así adelante. En el casode que necesite que le refresquen lamemoria a continuación mostramos fotosde una de las formas de hacerlo (estaversión utiliza un regulador de voltaje7805 de 5V).
La figura 4 muestra como conectar loscables de alimentación en la parte supe-rior.
Debe colocar cables positivos (rojo) ynegativos (negro) donde deba iremplazado el regulador de voltaje. Locables de alimentación en la parte infe-rior del protoboard se muestra en lafigura 5. Coloque cables de alimentacióntambién en la parte inferior de la placaentrenadora conectando cada rail. Luegocoloque el regulador 7805 y los conden-sadores de desacoplo como se observaen la figura 6. El regulador tiene empaquetado TO-220, por lo que la entrada de corriente está a laizquierda, el negativo (masa, GND o referencia) en el medio y la salida regulada de 5V en la patita de laderecha (mirando al regulador de frente). Añada cables desde la salida y GND hasta los railes de la placaentrenadora.
Añada también un condensador de 10µF entre la entrada del regulador y el negativo, así como otrode 10µF en el rail de la derecha entre el positivo y el negativo. La cinta plateada en el condensador indicala patita negativa.
Ahora debemos conectar un LED indicador detensión de alimentación conectada, figura 7. Pongaun LED y una resistencia de 220 Ohm en el ladoizquierdo de la placa, al otro lado del regulador devoltaje. Un LED conectado de esta manera es unagran ayuda a la hora de detectar problemas, siem-pre sabrá con rapidez cuando la placa recibe ali-mentación o si está en cortocircuito.
Vea en la figura 8 dónde se conectan los cablesde alimentación, son los cables rojo y negro a la
Figura 3
Figura 4 Figura 5 Figura 6
Figura 7
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 70
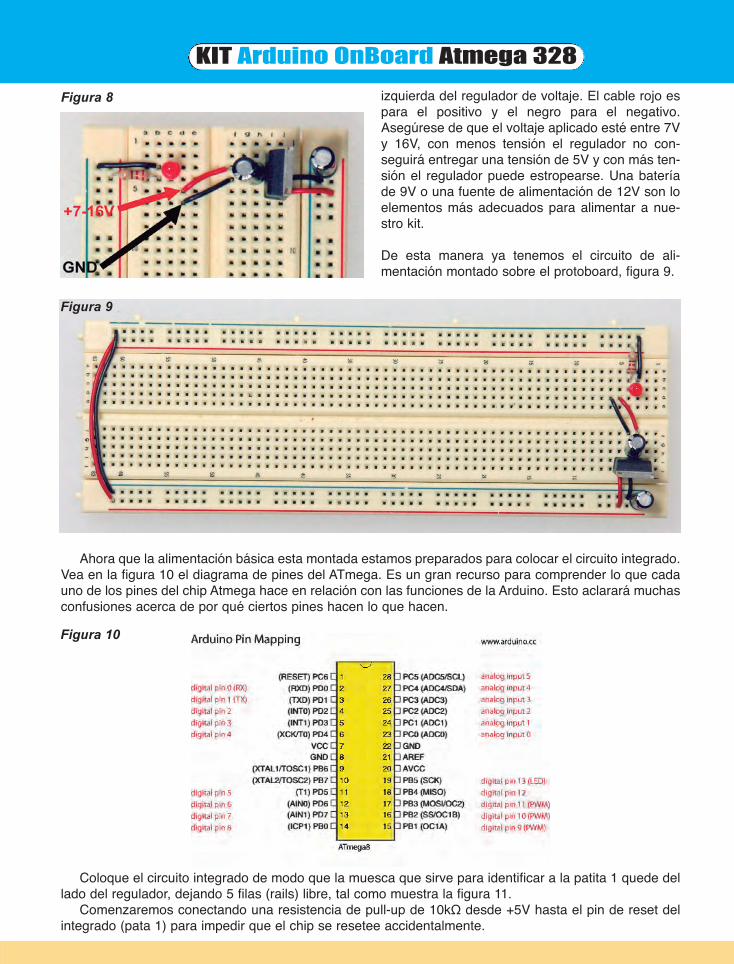
KIt Arduino onBoard Atmega 328
Proyectos Electrónicos 71
izquierda del regulador de voltaje. El cable rojo espara el positivo y el negro para el negativo.Asegúrese de que el voltaje aplicado esté entre 7Vy 16V, con menos tensión el regulador no con-seguirá entregar una tensión de 5V y con más ten-sión el regulador puede estropearse. Una bateríade 9V o una fuente de alimentación de 12V son loelementos más adecuados para alimentar a nue-stro kit.
De esta manera ya tenemos el circuito de ali-mentación montado sobre el protoboard, figura 9.
Ahora que la alimentación básica esta montada estamos preparados para colocar el circuito integrado.Vea en la figura 10 el diagrama de pines del ATmega. Es un gran recurso para comprender lo que cadauno de los pines del chip Atmega hace en relación con las funciones de la Arduino. Esto aclarará muchasconfusiones acerca de por qué ciertos pines hacen lo que hacen.
Coloque el circuito integrado de modo que la muesca que sirve para identificar a la patita 1 quede dellado del regulador, dejando 5 filas (rails) libre, tal como muestra la figura 11.
Comenzaremos conectando una resistencia de pull-up de 10kΩ desde +5V hasta el pin de reset delintegrado (pata 1) para impedir que el chip se resetee accidentalmente.
Figura 8
Figura 9
Figura 10
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 71
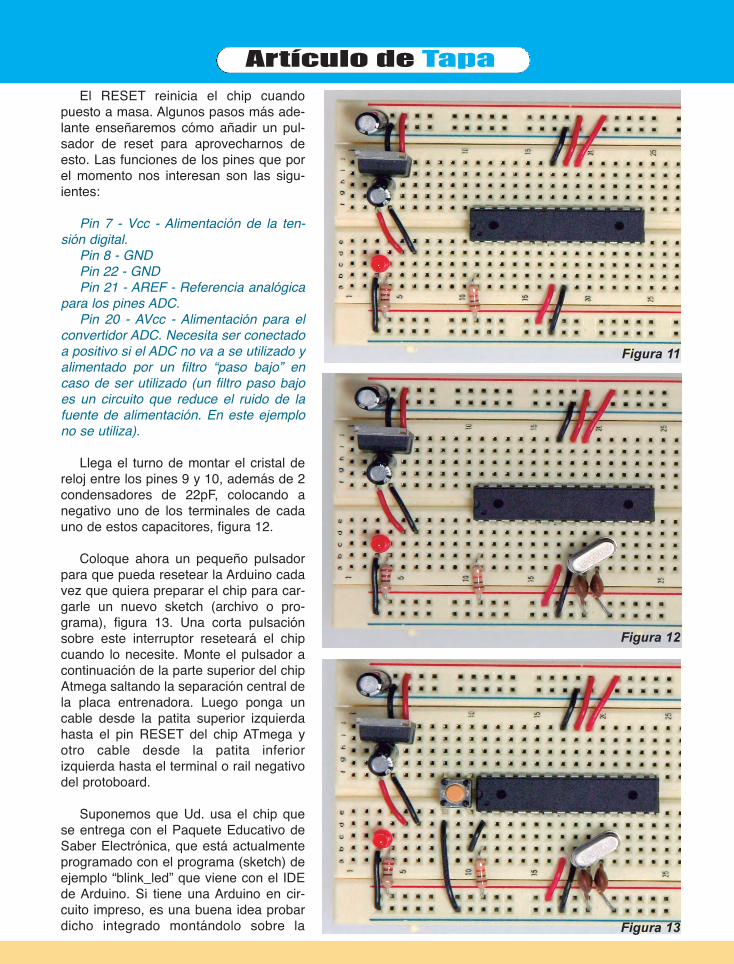
Artículo de tapa
72 Microcontroladores
El RESET reinicia el chip cuandopuesto a masa. Algunos pasos más ade-lante enseñaremos cómo añadir un pul-sador de reset para aprovecharnos deesto. Las funciones de los pines que porel momento nos interesan son las sigu-ientes:
Pin 7 - Vcc - Alimentación de la ten-sión digital.
Pin 8 - GNDPin 22 - GNDPin 21 - AREF - Referencia analógica
para los pines ADC.Pin 20 - AVcc - Alimentación para el
convertidor ADC. Necesita ser conectadoa positivo si el ADC no va a se utilizado yalimentado por un filtro “paso bajo” encaso de ser utilizado (un filtro paso bajoes un circuito que reduce el ruido de lafuente de alimentación. En este ejemplono se utiliza).
Llega el turno de montar el cristal dereloj entre los pines 9 y 10, además de 2condensadores de 22pF, colocando anegativo uno de los terminales de cadauno de estos capacitores, figura 12.
Coloque ahora un pequeño pulsadorpara que pueda resetear la Arduino cadavez que quiera preparar el chip para car-garle un nuevo sketch (archivo o pro-grama), figura 13. Una corta pulsaciónsobre este interruptor reseteará el chipcuando lo necesite. Monte el pulsador acontinuación de la parte superior del chipAtmega saltando la separación central dela placa entrenadora. Luego ponga uncable desde la patita superior izquierdahasta el pin RESET del chip ATmega yotro cable desde la patita inferiorizquierda hasta el terminal o rail negativodel protoboard.
Suponemos que Ud. usa el chip quese entrega con el Paquete Educativo deSaber Electrónica, que está actualmenteprogramado con el programa (sketch) deejemplo “blink_led” que viene con el IDEde Arduino. Si tiene una Arduino en cir-cuito impreso, es una buena idea probardicho integrado montándolo sobre la
Figura 11
Figura 12
Figura 13
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 72
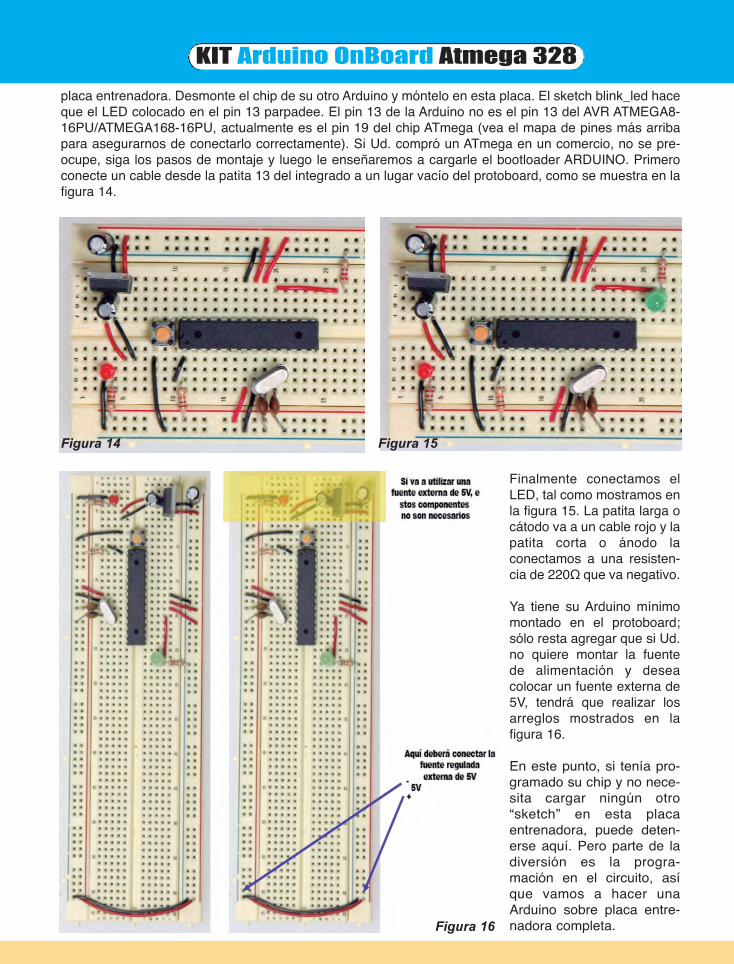
KIt Arduino onBoard Atmega 328
Proyectos Electrónicos 73
placa entrenadora. Desmonte el chip de su otro Arduino y móntelo en esta placa. El sketch blink_led haceque el LED colocado en el pin 13 parpadee. El pin 13 de la Arduino no es el pin 13 del AVR ATMEGA8-16PU/ATMEGA168-16PU, actualmente es el pin 19 del chip ATmega (vea el mapa de pines más arribapara asegurarnos de conectarlo correctamente). Si Ud. compró un ATmega en un comercio, no se pre-ocupe, siga los pasos de montaje y luego le enseñaremos a cargarle el bootloader ARDUINO. Primeroconecte un cable desde la patita 13 del integrado a un lugar vacío del protoboard, como se muestra en lafigura 14.
Finalmente conectamos elLED, tal como mostramos enla figura 15. La patita larga ocátodo va a un cable rojo y lapatita corta o ánodo laconectamos a una resisten-cia de 220Ω que va negativo.
Ya tiene su Arduino mínimomontado en el protoboard;sólo resta agregar que si Ud.no quiere montar la fuentede alimentación y deseacolocar un fuente externa de5V, tendrá que realizar losarreglos mostrados en lafigura 16.
En este punto, si tenía pro-gramado su chip y no nece-sita cargar ningún otro“sketch” en esta placaentrenadora, puede deten-erse aquí. Pero parte de ladiversión es la progra-mación en el circuito, asíque vamos a hacer unaArduino sobre placa entre-nadora completa.
Figura 14 Figura 15
Figura 16
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 73

Artículo de tapa
74 Microcontroladores
PrEPArAcIón dEl KIt PArA conEctArlo A lA comPutAdorA
Nuestro Arduino mínimo se puede conectar tanto al puerto USB deuna computadora como al puerto seral (puerto COM ó RS232),
Ahora vamos a añadir la placa adaptadora de USB a Serie a nues-tra Arduino sobre placa entrenadora.
Si Ud. tiene el KIT Arduino OnBoard Atmega 328 que se incluye enel Paquete educativo producido por Saber Electrónica no se pre-ocupe, ya que esta placa adaptadora no está incluida, pero leenseñaremos a armar un circuito sencillo para la conexión al puertoserial de su computadora.
Hay muchos tipos de placas adaptadoras y Ud. debe fijarse cuál esla que consigue en su localidad. La figura 17 muestra la disposiciónde pines de la adaptadora FT232 de Sparkfun.
Es curiosocomo estáhecho el mar-cado de los pines de la Sparkfun FT232, simple-mente dela la vuelta. En esta situación vamos ausar VCC (para suministrar 5V desde el puertoUSB de nuestro ordenador a nuestra placa),GND; TXD, y RXD.
Si no ha añadido los pines macho a su placaadaptadora tienes que hacerlo ahora. Conecta elpin VCCIO de la placa adaptadora a +5V y GNDa masa, figura 18.
Ahora llegó el momento de comunicar la placaadaptadora de USB a Serie con nuestra recién
montada Arduino. Conectamos el RX (pin 2) de nuestro chip ATmega con el TX de la placa USB a Serie,y conectamos el TX (pin 3) de nuestro chip ATmega con el RX de la placa de USB a Serie, figura 19.
Figura 17
Figura 18
Figura 19
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 74
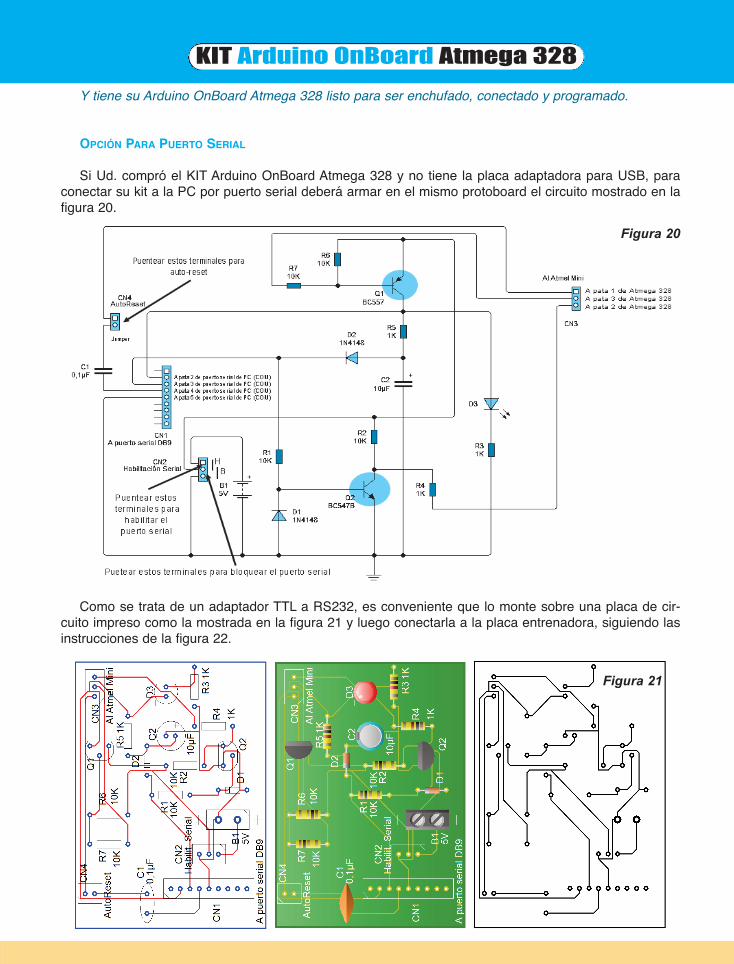
KIt Arduino onBoard Atmega 328
Proyectos Electrónicos 75
Y tiene su Arduino OnBoard Atmega 328 listo para ser enchufado, conectado y programado.
oPcIón PArA PuErto sErIAl
Si Ud. compró el KIT Arduino OnBoard Atmega 328 y no tiene la placa adaptadora para USB, paraconectar su kit a la PC por puerto serial deberá armar en el mismo protoboard el circuito mostrado en lafigura 20.
Como se trata de un adaptador TTL a RS232, es conveniente que lo monte sobre una placa de cir-cuito impreso como la mostrada en la figura 21 y luego conectarla a la placa entrenadora, siguiendo lasinstrucciones de la figura 22.
Figura 20
Figura 21
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 75

Artículo de tapa
76 Microcontroladores
Todos los componentes son comunes y X1 es un conector DB9 para conectarlo al puerto COM de suPC (puerto serial).
Si Ud. no tiene ninguna experiencia en electrónica, puede solicitarle a algún técnico que se la arme, oenvíenos un mail y le mandaremos un instructivo paso a paso de cómo montarla en el mismo protoboard.
Ya tiene su ARDUINO montado y listo para usar, sólo resta saber cómo podemos cargarle al micro-controlador el bootloader para que pueda comunicarse con el IDE de Arduino (si es que Ud. no tiene elkit que viene con el Paquete Educativo de Saber Elecrónica), pero ese es tema de un próximo artículo.Si Ud. no desea esperar hasta la próxima edición, puede descargar el manual completo de este kit desdenuestra web: www.webelectronica.com.ar, haciendo clic en el ícono password e ingresando la clave:
arduino. J
Figura 22
Mont Esp - Arduino mínimo.qxd:lx1435.qxd 23/02/14 13:40 Page 76

4ª forros.qxd:Maquetación 1 15/01/14 12:45 Página 1