sistemas de recepcion
DESCRIPTION
GEODESIATRANSCRIPT

SISTEMAS DE RECEPCION
CURSO:GEODESIA SATELITAL
ESTUDIANTE:GALVEZ ALVARADO, Jamie Augusto
CODIGO:
20102063F (2010-I)
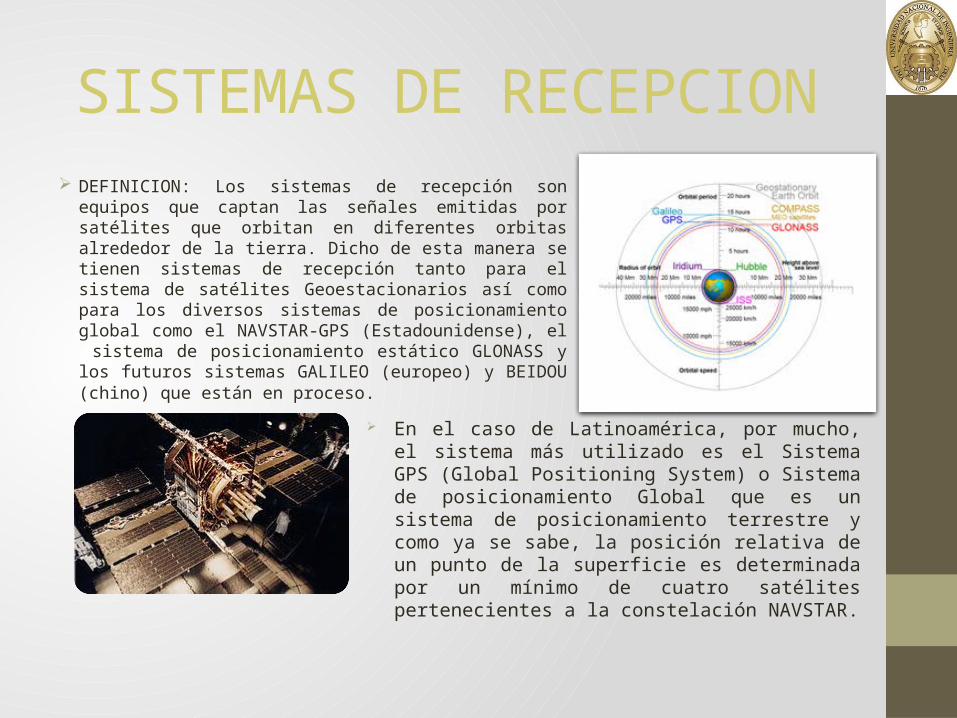
SISTEMAS DE RECEPCION DEFINICION: Los sistemas de recepción son equipos que
captan las señales emitidas por satélites que orbitan en diferentes orbitas alrededor de la tierra. Dicho de esta manera se tienen sistemas de recepción tanto para el sistema de satélites Geoestacionarios así como para los diversos sistemas de posicionamiento global como el NAVSTAR-GPS (Estadounidense), el sistema de posicionamiento estático GLONASS y los futuros sistemas GALILEO (europeo) y BEIDOU (chino) que están en proceso.
En el caso de Latinoamérica, por mucho, el sistema más utilizado es el Sistema GPS (Global Positioning System) o Sistema de posicionamiento Global que es un sistema de posicionamiento terrestre y como ya se sabe, la posición relativa de un punto de la superficie es determinada por un mínimo de cuatro satélites pertenecientes a la constelación NAVSTAR.
SISTEMAS DE RECEPCION
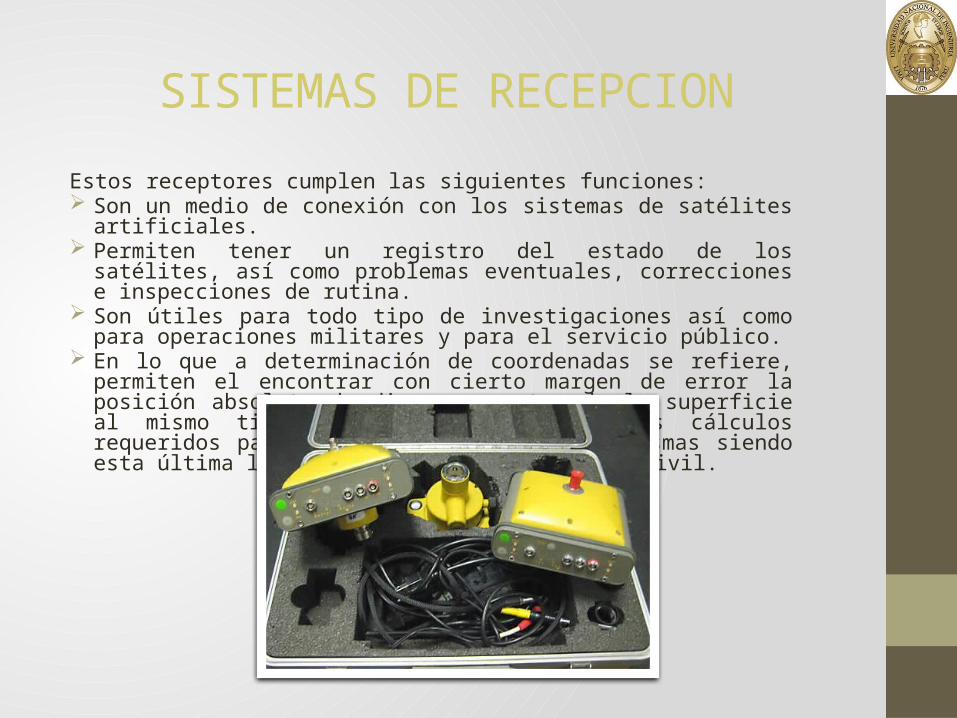
Estos receptores cumplen las siguientes funciones: Son un medio de conexión con los sistemas de satélites artificiales. Permiten tener un registro del estado de los satélites, así como problemas
eventuales, correcciones e inspecciones de rutina. Son útiles para todo tipo de investigaciones así como para operaciones militares
y para el servicio público. En lo que a determinación de coordenadas se refiere, permiten el encontrar con
cierto margen de error la posición absoluta de diversos puntos de la superficie al mismo tiempo que toma parte en los cálculos requeridos para la determinación de las mismas siendo esta última la más importante para la Ing. Civil.
SISTEMAS DE RECEPCION
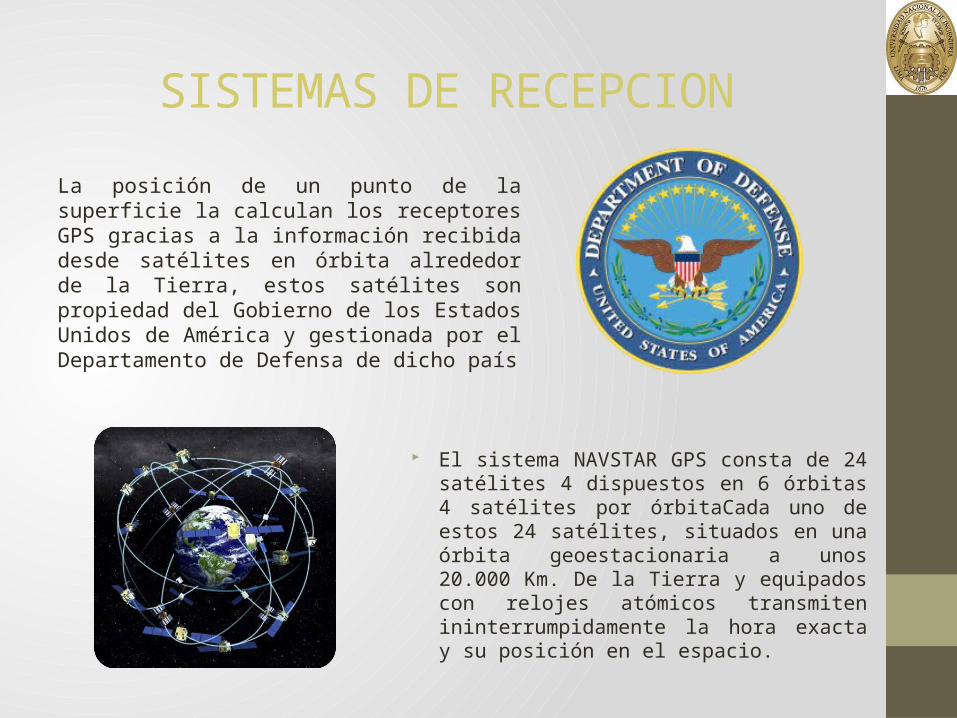
La posición de un punto de la superficie la calculan los receptores GPS gracias a la información recibida desde satélites en órbita alrededor de la Tierra, estos satélites son propiedad del Gobierno de los Estados Unidos de América y gestionada por el Departamento de Defensa de dicho país
El sistema NAVSTAR GPS consta de 24 satélites 4 dispuestos en 6 órbitas 4 satélites por órbitaCada uno de estos 24 satélites, situados en una órbita geoestacionaria a unos 20.000 Km. De la Tierra y equipados con relojes atómicos transmiten ininterrumpidamente la hora exacta y su posición en el espacio.
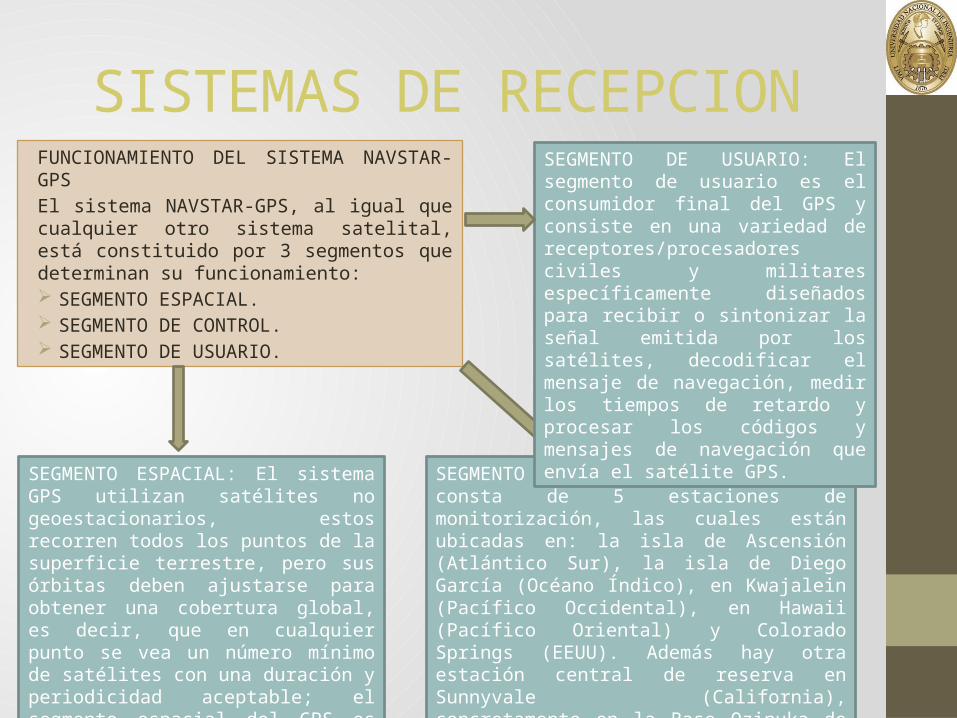
SISTEMAS DE RECEPCIONFUNCIONAMIENTO DEL SISTEMA NAVSTAR-GPSEl sistema NAVSTAR-GPS, al igual que cualquier otro sistema satelital, está constituido por 3 segmentos que determinan su funcionamiento: SEGMENTO ESPACIAL. SEGMENTO DE CONTROL. SEGMENTO DE USUARIO.
SEGMENTO ESPACIAL: El sistema GPS utilizan satélites no geoestacionarios, estos recorren todos los puntos de la superficie terrestre, pero sus órbitas deben ajustarse para obtener una cobertura global, es decir, que en cualquier punto se vea un número mínimo de satélites con una duración y periodicidad aceptable; el segmento espacial del GPS es una constelación de satélites en órbitas semisíncronas alrededor de la Tierra.
SEGMENTO DE CONTROL: este segmento consta de 5 estaciones de monitorización, las cuales están ubicadas en: la isla de Ascensión (Atlántico Sur), la isla de Diego García (Océano Índico), en Kwajalein (Pacífico Occidental), en Hawaii (Pacífico Oriental) y Colorado Springs (EEUU). Además hay otra estación central de reserva en Sunnyvale (California), concretamente en la Base Ozinuka de la U.S. Air Force. La Estación Maestra de Control (MCS) está localizada en la base aérea de Falcon Colorado
SEGMENTO DE USUARIO: El segmento de usuario es el consumidor final del GPS y consiste en una variedad de receptores/procesadores civiles y militares específicamente diseñados para recibir o sintonizar la señal emitida por los satélites, decodificar el mensaje de navegación, medir los tiempos de retardo y procesar los códigos y mensajes de navegación que envía el satélite GPS.
SISTEMAS DE RECEPCION
FUNCIONAMIENTO DEL RECEPTOR GPSLos receptores GPS reciben la información precisa de la hora y la posición del satélite comparándola con el tiempo de llegada de la señal para calcular distancias.
El GPS recibe exactamente, recibe dos tipos de datos, los datos de Almanaque, que consisten en una serie de parámetros generales que permiten determinar la ubicación de los satélites necesarios para la triangulación y las Efemérides que hace referencia a los datos precisos, únicamente, del satélite que está siendo captado por el receptor GPS, son parámetros orbitales exclusivos de ese satélite y se utilizan para calcular la distancia exacta del receptor al satélite. Con estos datos y captado el receptor; se hace la triangulación respectiva hallando así la posición del receptor con cierto margen de error el cual puede variar en el intervalo de 15-100 metros RMS.
Un metro RMS o error cuadrático medio es el valor teórico del error promedio de una medición y la ecuación que lo define es:
SISTEMAS DE RECEPCION
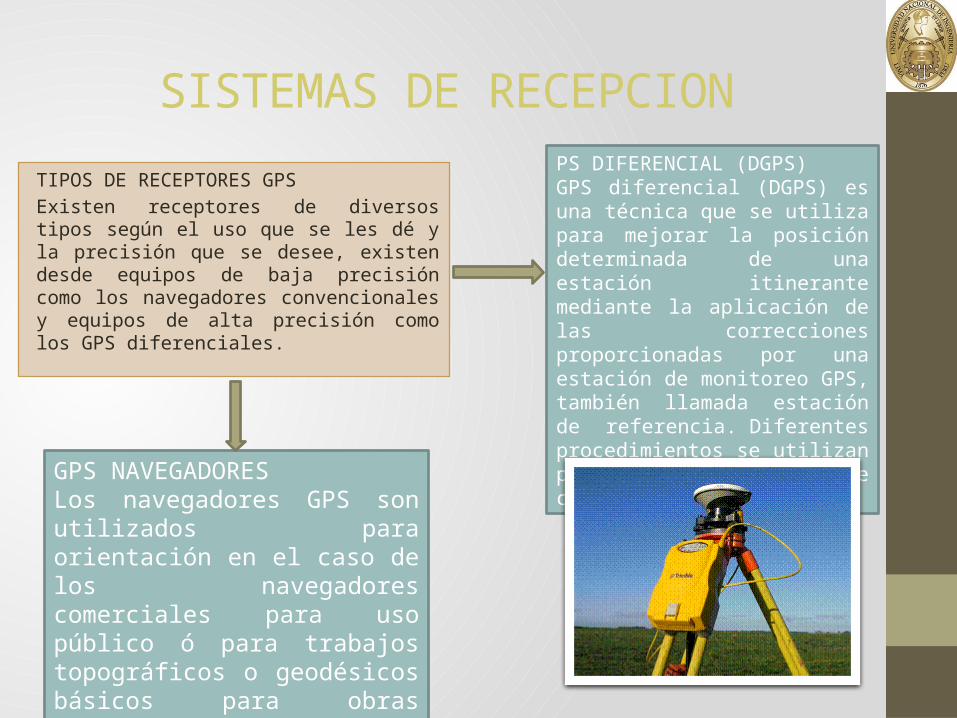
TIPOS DE RECEPTORES GPSExisten receptores de diversos tipos según el uso que se les dé y la precisión que se desee, existen desde equipos de baja precisión como los navegadores convencionales y equipos de alta precisión como los GPS diferenciales.
GPS NAVEGADORESLos navegadores GPS son utilizados para orientación en el caso de los navegadores comerciales para uso público ó para trabajos topográficos o geodésicos básicos para obras Ingenieriles que sirven de referencia para trabajos posteriores.
PS DIFERENCIAL (DGPS)GPS diferencial (DGPS) es una técnica que se utiliza para mejorar la posición determinada de una estación itinerante mediante la aplicación de las correcciones proporcionadas por una estación de monitoreo GPS, también llamada estación de referencia. Diferentes procedimientos se utilizan para la generación de correcciones.
SISTEMAS DE RECEPCION
NAVEGADORES DE USO PUBLICO: En este tipo de sistemas de recepción tenemos navegadores GPS para usos de orientación, sirven para generar rutas hacia un destino en particular. Sus usos son variados y abarcan navegadores móviles para automóviles, navegadores de mano para excursiones, guía de calles u orientación por medio de brújula electrónica.
NAVEGADORES DE USO INGENIERIL: Este tipo de navegadores tienen una precisión mejor que los anteriores debido a algunas propiedades que éste presenta, además presenta una gran variedad de funciones que permiten determinar las coordenadas de uno o varios puntos y almacenarlas en su memoria.
GPS NAVEGADOR: Se puede clasificar en dos ámbitos de acuerdo a su uso.
LAS MARCAS EXISTENTES EN ESTE TIPO DE NAVEGADORES SON: GARMIN, MAGALLAN, NAVMAN, ROUTE-66, TOM, MITAC-MIO, VIAMICHELIN, BECKER, HAICOM, GLOBALSAT, HOLUX, KEOMO, ROYALTEK, FORTUNA, EMTAC, FALCOM, ARKON HP, AIRIS, ALAN, LEADTEK, COMP GPS, FUJITSU-SIEMENS, ASUS, HERBERT RICHTER, WAYFINDER, REALTRACK, QSTARZ, QUINTEZZ, WOXTER, PALM, KRUSELL, HACER, KIRRIO, PARROT, QTEK, I-MATE, SUUNTO, NOKIA, INFORAD, ADAPT, HTC, I-KIDS, SIEMENS VDO, RIKALINE.
Algunas de las propiedades que mejoran el rendimiento de este navegador son: WAYPOINTS MEDIAS DE POSICIÓN RUTAS TRACKS FUNCIONES DE PERSONALIZACIÓN
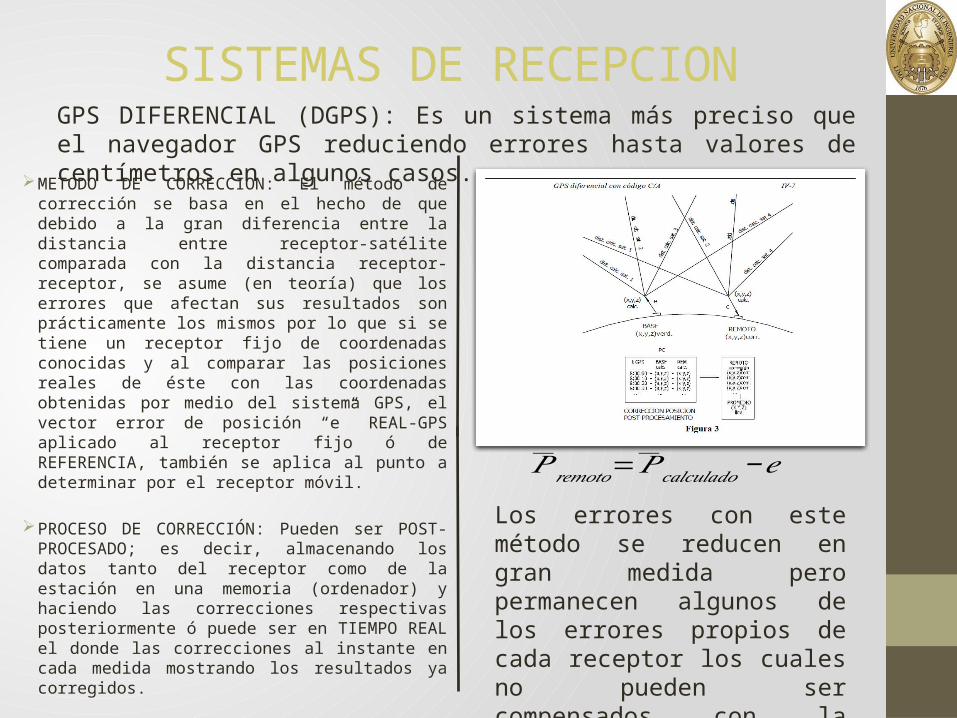
SISTEMAS DE RECEPCIONGPS DIFERENCIAL (DGPS): Es un sistema más preciso que el navegador GPS reduciendo errores hasta valores de centímetros en algunos casos.
METODO DE CORRECCION: El método de corrección se basa en el hecho de que debido a la gran diferencia entre la distancia entre receptor-satélite comparada con la distancia receptor-receptor, se asume (en teoría) que los errores que afectan sus resultados son prácticamente los mismos por lo que si se tiene un receptor fijo de coordenadas conocidas y al comparar las posiciones reales de éste con las coordenadas obtenidas por medio del sistema GPS, el vector error de posición “e” REAL-GPS aplicado al receptor fijo ó de REFERENCIA, también se aplica al punto a determinar por el receptor móvil.
PROCESO DE CORRECCIÓN: Pueden ser POST-PROCESADO; es decir, almacenando los datos tanto del receptor como de la estación en una memoria (ordenador) y haciendo las correcciones respectivas posteriormente ó puede ser en TIEMPO REAL el donde las correcciones al instante en cada medida mostrando los resultados ya corregidos.
𝑃𝑟𝑒𝑚𝑜𝑡𝑜=𝑃𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜−𝑒
Los errores con este método se reducen en gran medida pero permanecen algunos de los errores propios de cada receptor los cuales no pueden ser compensados con la teoría planteada para este método.
SISTEMAS DE RECEPCION SISTEMAS DIFERENCIALES GPS DE ÁREA EXTENSA (WAD): El WAD (Wide Area
Diferencial) consiste en una red de estaciones de referencia GPS, que generan correcciones diferenciales en tiempo real sobre un área de influencia extensa, permiten de esta manera aumentar la precisión en la determinación de las posiciones de los satélites, los retrasos atmosféricos y las diferencias de tiempo. Estas mandan las correcciones a una estación maestra (MCS, Master Control Station) que las modela para cada zona de cobertura, donde se monitoriza, actualizando las efemérides, los retardos atmosféricos, y estimando la correlación al estado de los relojes de los satélites. A continuación transmite las correcciones a toda el área de aplicación por medio de un sistema de comunicaciones, que en el caso de WADGPS (Wide Área DGPS) suele ser vía satélite geoestacionario.
Los sistemas diferenciales de área extensa son: EGNOS (Europa), WAAS (EEUU) y MSAS (Japón). Al Servicio Europeo Geoestacionario de Navegación, se le conoce como EGNOS. Este utiliza las señales del GPS, GLONASS y otros satélites geoestacionarios para mejorar la precisión, integridad y disponibilidad de los datos para navegación. En el caso de EGNOS los satélites adicionales geoestacionarios son INMARSAT, AOR-E, INMARSAT IOR y ARTEMIS.
SISTEMAS DE RECEPCION
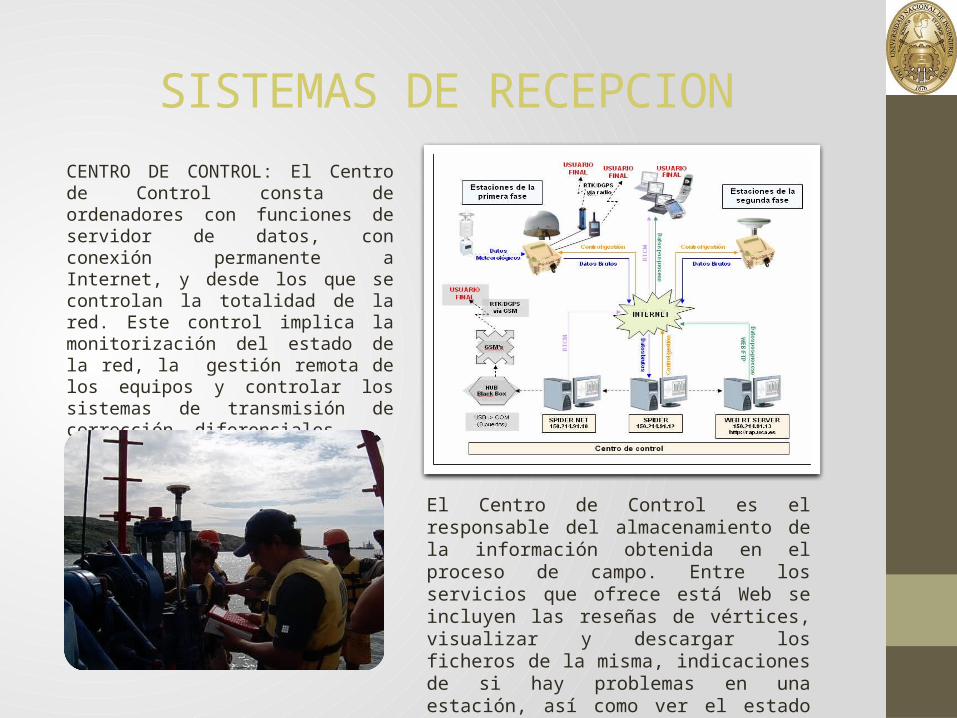
CENTRO DE CONTROL: El Centro de Control consta de ordenadores con funciones de servidor de datos, con conexión permanente a Internet, y desde los que se controlan la totalidad de la red. Este control implica la monitorización del estado de la red, la gestión remota de los equipos y controlar los sistemas de transmisión de corrección diferenciales.
El Centro de Control es el responsable del almacenamiento de la información obtenida en el proceso de campo. Entre los servicios que ofrece está Web se incluyen las reseñas de vértices, visualizar y descargar los ficheros de la misma, indicaciones de si hay problemas en una estación, así como ver el estado en tiempo real del conjunto de la red.
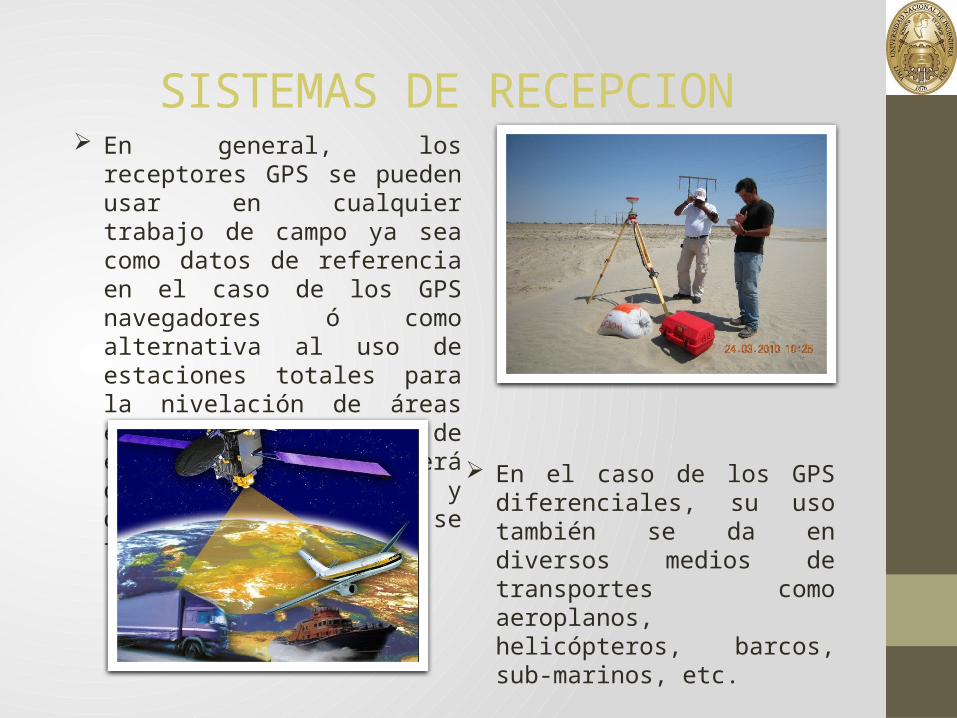
SISTEMAS DE RECEPCION En general, los receptores GPS se
pueden usar en cualquier trabajo de campo ya sea como datos de referencia en el caso de los GPS navegadores ó como alternativa al uso de estaciones totales para la nivelación de áreas extensas. El uso de estos equipos dependerá del acceso económico y del presupuesto que se tenga para la obra
En el caso de los GPS diferenciales, su uso también se da en diversos medios de transportes como aeroplanos, helicópteros, barcos, sub-marinos, etc.
SISTEMAS DE RECEPCION
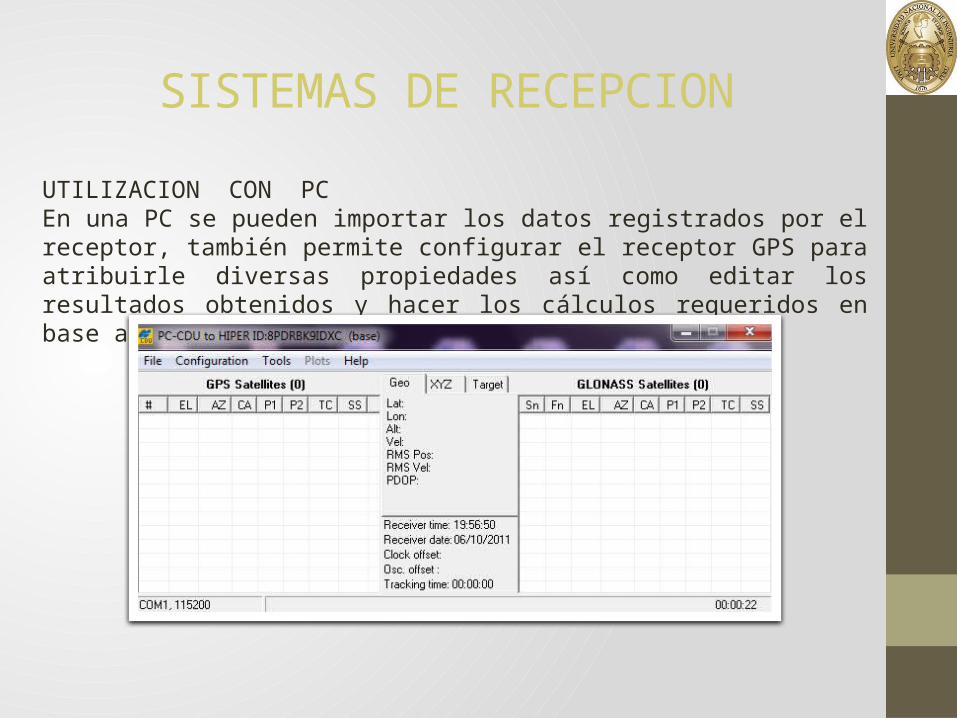
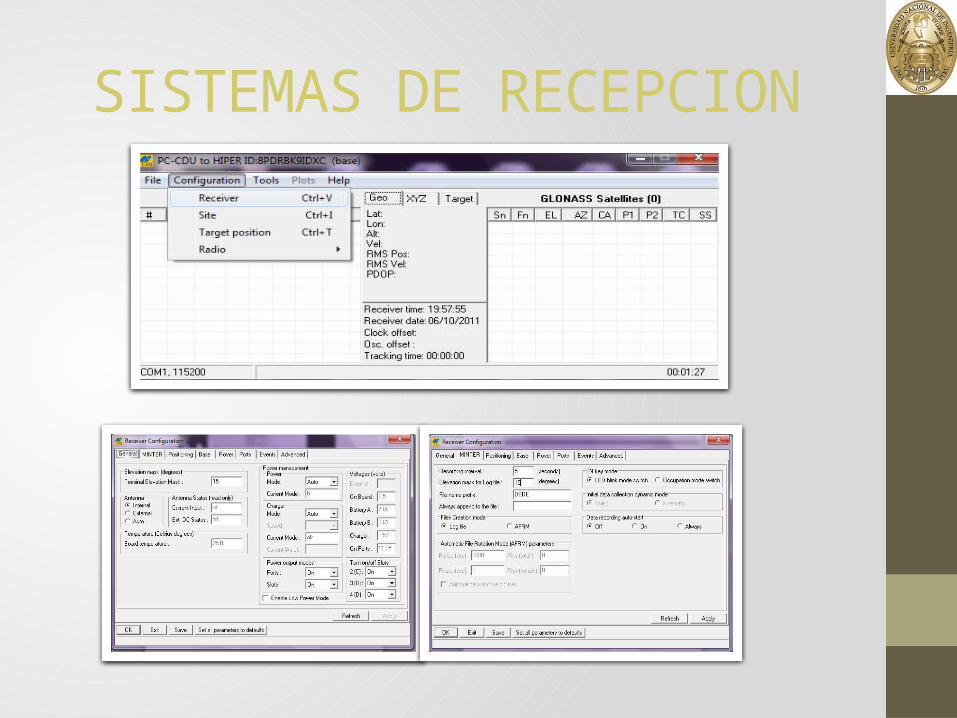
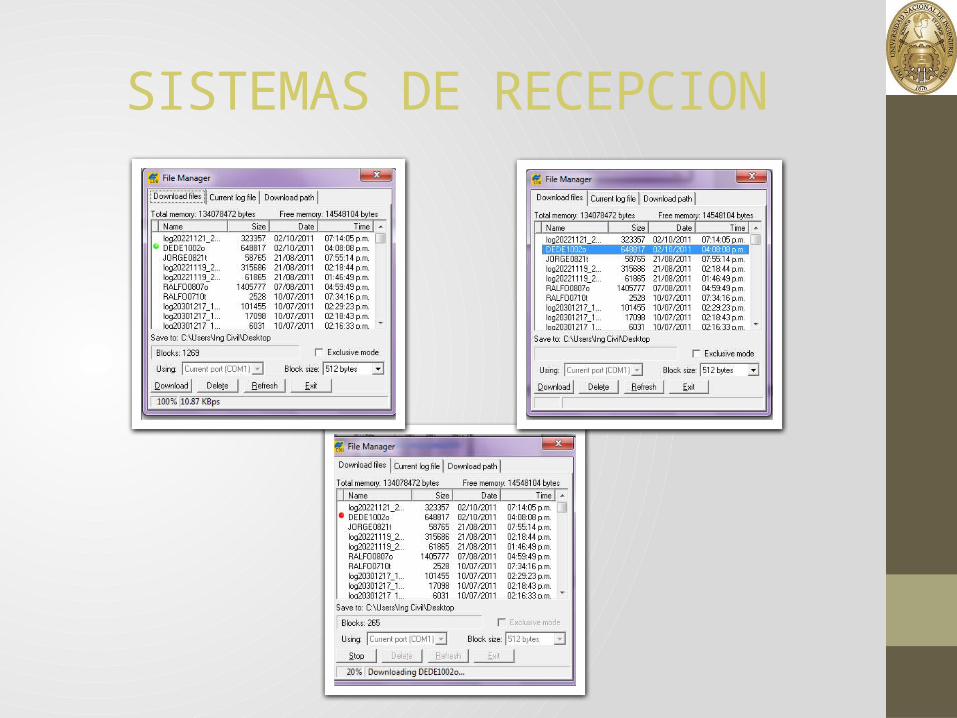
UTILIZACION CON PCEn una PC se pueden importar los datos registrados por el receptor, también permite configurar el receptor GPS para atribuirle diversas propiedades así como editar los resultados obtenidos y hacer los cálculos requeridos en base a ellos.
SISTEMAS DE RECEPCION
SISTEMAS DE RECEPCION
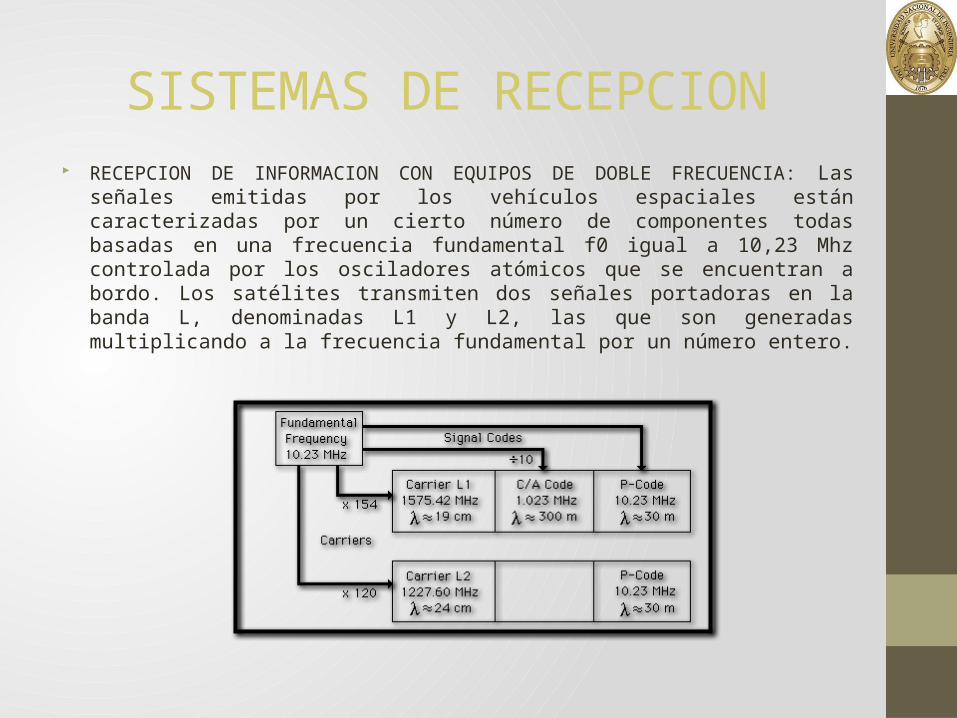
SISTEMAS DE RECEPCION RECEPCION DE INFORMACION CON EQUIPOS DE DOBLE FRECUENCIA: Las señales
emitidas por los vehículos espaciales están caracterizadas por un cierto número de componentes todas basadas en una frecuencia fundamental f0 igual a 10,23 Mhz controlada por los osciladores atómicos que se encuentran a bordo. Los satélites transmiten dos señales portadoras en la banda L, denominadas L1 y L2, las que son generadas multiplicando a la frecuencia fundamental por un número entero.
SISTEMAS DE RECEPCION
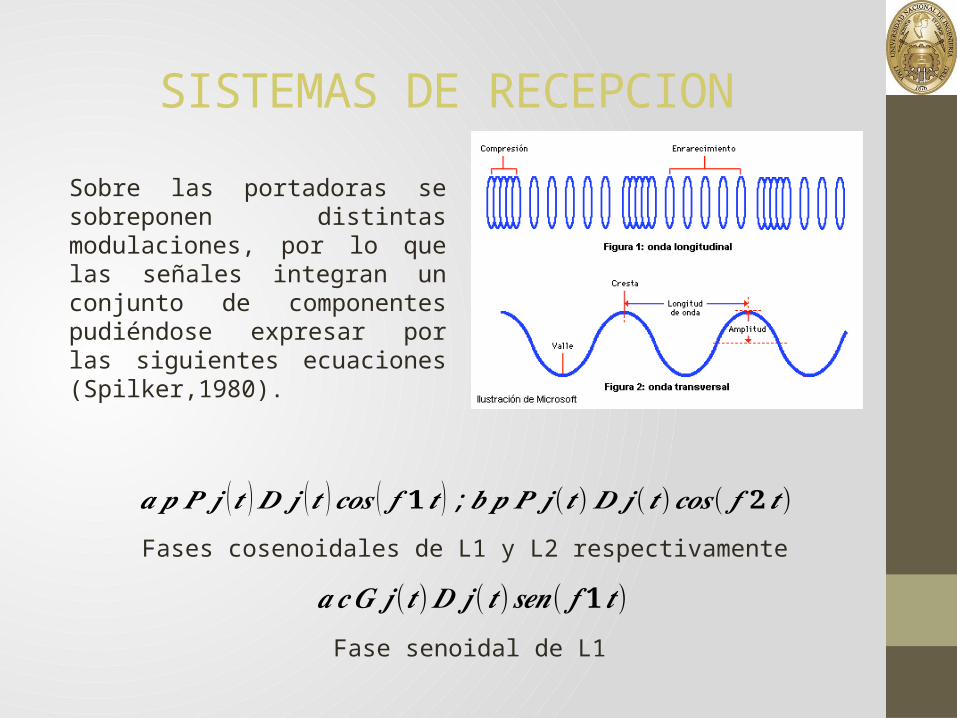
Sobre las portadoras se sobreponen distintas modulaciones, por lo que las señales integran un conjunto de componentes pudiéndose expresar por las siguientes ecuaciones (Spilker,1980).
𝒂𝒑 𝑷 𝒋 (𝒕 ) 𝑫 𝒋 (𝒕 )𝒄𝒐𝒔 ( 𝒇 𝟏𝒕 ) ;𝒃𝒑 𝑷 𝒋(𝒕)𝑫 𝒋 (𝒕)𝒄𝒐𝒔( 𝒇 𝟐𝒕)Fases cosenoidales de L1 y L2 respectivamente
𝒂𝒄𝑮 𝒋(𝒕)𝑫 𝒋 (𝒕)𝒔𝒆𝒏( 𝒇 𝟏𝒕)Fase senoidal de L1
SISTEMAS DE RECEPCION En la expresión anterior, la fase cosenoidal de ambas portadoras es modulada por una
secuencia de pulsos conocida como código P y representada en las ecuaciones anteriores con Pj(t), donde el subíndice j se refiere al satélite j-ésimo. El código P genera un algoritmo que se repite cada 267 días. Observado a lo largo de este período la secuencia no presenta ninguna simetría, razón por la cual se denomina seudoaleatoria. La frecuencia del código P es de 10,23 Mhz.
Ahora; completando el posicionamiento en fase; la fase senoidal de la portadora L1 es modulada por una secuencia de pulsos llamada código C/A representada en la segunda ecuación por Gj(t). Este código se repite cada 1 milisegundo y tiene una frecuencia de 1,023 Mhz.
Los coeficientes ap, ac, bp representan las amplitudes de los códigos P y C/A. Además de los dos códigos, ambas fases de las portadoras L1 y L2 son moduladas por una secuencia de baja frecuencia representada en las ecuaciones por Dj(t).
Con estas ecuaciones y parámetros se determinan en cada caso sea con L1 o L2 distancias desde un satélite de la constelación hacia un punto de la superficie.
SISTEMAS DE RECEPCION Mientras que los equipos diferenciales convencionales trabajan con la fase L1 es decir,
toman sus datos en función a la onda portadora L1 transmitida por el satélite. Los EQUIPOS DE DOBLE FRECUENCIA Trabajan con la portadora L1 y también con la L2, lo cual permite disminuir los errores derivados de la propagación desigual de la señal a través de las distintas capas atmosféricas (sobre todo la ionosfera) y resolver un gran número de ambigüedades.
Con este tipo de equipos se pueden llegar a precisiones por debajo del centímetro con postprocesado para distancias de hasta 10 km, y por debajo del metro para distancias de hasta 500 km.