sistema para la localización automática de fallas en
TRANSCRIPT

Sistema para la localización automática de fallas en líneas de
transmisión
William Elías Padilla Almeida
Universidad Nacional de Colombia
Facultad de Minas, Departamento de Energía Eléctrica y Automática
Medellín, Colombia
2016


Sistema para la localización automática de fallas en líneas de
transmisión
William Elías Padilla Almeida
Trabajo de investigación presentado como requisito parcial para optar al título de:
Magister en Ingeniería - Ingeniería Eléctrica
Director:
Ph. D. German Darío Zapata Madrigal
Línea de Investigación:
Sistemas eléctricos de Potencia
Grupo de Investigación:
Grupo de Teleinformática y Teleautomática (Grupo T&T)
Universidad Nacional de Colombia
Facultad de Minas, Departamento de Energía Eléctrica y Automática
Medellín, Colombia
2016


Resumen y Abstract V
Resumen
Este documento propone y diseña un prototipo de sistema para localización automática de
fallas en líneas de transmisión, basándose en la utilización de diferentes métodos de
localización de fallas desarrollados por diferentes autores. Para llegar a esto se analizó el
principio matemático y se le realizaron pruebas a diversos métodos, permitiendo
desarrollar por medio de la herramienta redes de Petri una metodología para la utilización
de cada método de forma paralela. Finalmente, se implementó un prototipo del sistema
por medio del cual se probó la metodología desarrollada con la utilización de fallas
simuladas en ATPDraw y limitando los datos de entrada al sistema, obteniéndose un
porcentaje de efectividad en la localización del 90% de las fallas.
Palabras clave: Línea de Transmisión, Localización de Fallas, Redes de Petri,
Sistema de Potencia.
Abstract
This paper proposes and designs a prototype system for automatic fault localization in
transmission lines, based on the use of different fault localization methods developed by
different authors. In order to do so, the mathematical principle was analyzed and tests were
carried out over different methods, allowing for the development, through the Petri nets
tool, of a methodology for the use of each method in a parallel manner. Finally, a prototype
of the system was implemented through which the developed methodology was proven
with the use of simulated faults in ATPDraw and the limiting of the system input data,
obtaining an effectivity percentage in the location of 90% of the failures.
Keywords: Transmission Line, Fault Location, Petri Nets, Power System.

Contenido VI
Contenido
Pág.
Resumen .......................................................................................................................... V
Lista de figuras ............................................................................................................ VIII
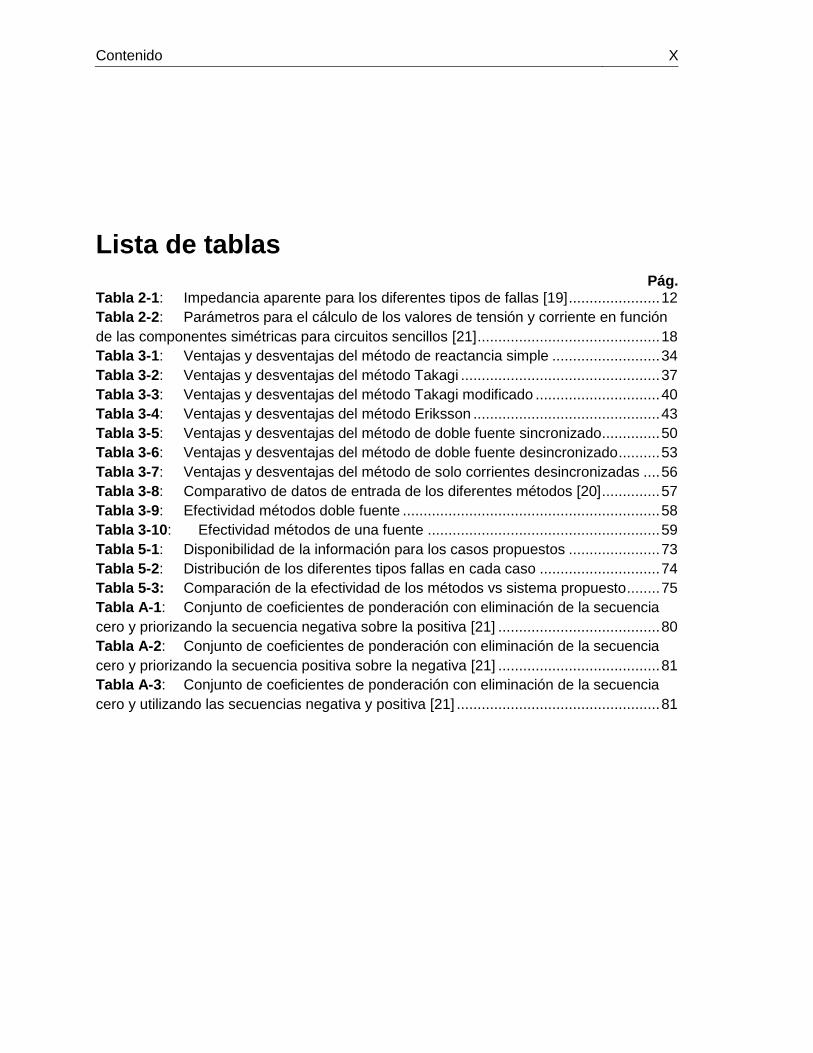
Lista de tablas ................................................................................................................. X
Introducción .................................................................................................................... 1
1. Estado del arte ......................................................................................................... 3 1.1 Cálculo de los parámetros eléctricos en líneas de transmisión ........................... 3 1.2 Métodos para la localización de fallas en líneas de transmisión .......................... 5
1.2.1 Métodos de localización desde un extremo ..................................................... 5 1.2.2 Métodos de localización de dos extremos ....................................................... 6
1.3 Otros métodos de localización de fallas .............................................................. 7 1.4 Sincronización de registros de fallas ................................................................... 7 1.5 Aplicaciones de localización de fallas en tiempo real .......................................... 8
2. Métodos de localización de fallas ........................................................................... 9 2.1 Método de reactancia simple ............................................................................ 11 2.2 Método Takagi .................................................................................................. 13 2.3 Método Takagi modificado ................................................................................ 14 2.4 Método Eriksson ............................................................................................... 15 2.5 Método Novosel ................................................................................................ 16 2.6 Método de localización con factores de distribución de corriente de falla .......... 17 2.7 Método de localización de dos extremos sincronizados .................................... 19 2.8 Método de dos extremos desincronizados ........................................................ 22 2.9 Método de solo corrientes desincronizadas ...................................................... 24
3. Análisis y comparación de métodos de localización de fallas ........................... 27 3.1 Análisis del método de reactancia simple ......................................................... 30
3.1.1 Datos de entrada ........................................................................................... 30 3.1.2 Análisis de resultados.................................................................................... 31
3.2 Análisis del método Takagi ............................................................................... 34 3.2.1 Datos de entrada ........................................................................................... 34 3.2.2 Análisis de resultados.................................................................................... 35
3.3 Análisis del método Takagi Modificado ............................................................. 38 3.3.1 Datos de entrada ........................................................................................... 38 3.3.2 Análisis de resultados.................................................................................... 38
3.4 Análisis del método Eriksson ............................................................................ 40

Contenido VII
3.4.1 Datos de entrada ........................................................................................... 40 3.4.2 Análisis de resultados .................................................................................... 41
3.5 Análisis del método Novosel ............................................................................ 44 3.5.1 Datos de entrada ........................................................................................... 44 3.5.2 Análisis de resultados .................................................................................... 44
3.6 Análisis del método de factores de distribución de corrientes de falla .............. 45 3.6.1 Datos de entrada ........................................................................................... 45 3.6.2 Análisis de resultados .................................................................................... 46
3.7 Análisis del método doble fuente sincronizado ................................................. 47 3.7.1 Datos de entrada ........................................................................................... 47 3.7.2 Análisis de resultados .................................................................................... 47
3.8 Análisis del método doble fuente desincronizado ............................................. 50 3.8.1 Datos de entrada ........................................................................................... 50 3.8.2 Análisis de resultados .................................................................................... 51
3.9 Análisis del método de solo corrientes desincronizadas ................................... 53 3.9.1 Datos de entrada ........................................................................................... 53 3.9.2 Análisis de resultados .................................................................................... 54
4. Metodología para el cálculo automático de localización de fallas ...................... 61 4.1 Redes de Petri ................................................................................................. 61 4.2 Metodología ..................................................................................................... 62
4.2.1 Identificación de línea y fase fallada y carga de información .......................... 62 4.2.2 Prioridad en la utilización de los métodos ...................................................... 65 4.2.3 Ejecución de los métodos de localización ...................................................... 67
5. Prototipo y pruebas del sistema ........................................................................... 69 5.1 Prototipo diseñado ........................................................................................... 69 5.2 Pruebas del sistema ......................................................................................... 73
6. Conclusiones y recomendaciones ........................................................................ 77 6.1 Conclusiones .................................................................................................... 77 6.2 Recomendaciones ............................................................................................ 79
A. Anexo: Coeficientes de ponderación para cálculo de corriente total de falla ... 80
B. Anexo: Resultados método factores de distribución de corrientes de fallas .... 82
C. Anexo: Redes de Petri desarrolladas ................................................................... 87
Bibliografía .................................................................................................................... 92

Contenido VIII
Lista de figuras
Pág. Figura 2-1: Diagrama unifilar de una línea de transmisión en falla [20] ....................... 9
Figura 2-2: Errores ocasionados por resistencia de falla en circuito [19] .................. 11
Figura 2-3: Unifilar y circuito equivalente de una línea de transmisión [19]. .............. 19
Figura 2-4: Modelo de línea de parámetros distribuidos de secuencia positiva. [21]. 21
Figura 2-5: Modelo de línea de parámetros concentrados [21]. ................................ 23
Figura 2-6: Conexión de las redes de secuencia para falla monofásica [10]. ............ 25
Figura 3-1: Sistema de potencia simulado. ATPDraw ............................................... 28
Figura 3-2: Método reactancia simple para falla monofásica desde extremo A ........ 31
Figura 3-3: Método reactancia simple para falla bifásica aislada desde extremo A .. 32
Figura 3-4: Método reactancia simple para falla bifásica a tierra desde extremo A ... 32
Figura 3-5: Método reactancia simple para falla trifásica desde extremo A .............. 32
Figura 3-6: Modelo de falla bifásica a tierra .............................................................. 34
Figura 3-7: Método Takagi para falla monofásica desde el extremo A ...................... 35
Figura 3-8: Método Takagi para falla bifásica aislada desde el extremo A ............... 36
Figura 3-9: Método Takagi para falla bifásica a tierra desde el extremo A ................ 36
Figura 3-10: Método Takagi para falla trifásica desde el extremo A ........................... 36
Figura 3-11: Método Takagi modificado para falla monofásica desde el extremo A .... 39
Figura 3-12: Método Eriksson para falla monofásica desde el extremo A ................... 41
Figura 3-13: Método Eriksson para falla bifásica aislada desde el extremo A ............. 42
Figura 3-14: Método Eriksson para falla bifásica a tierra desde el extremo A ............. 42
Figura 3-15: Método Eriksson para falla trifásica desde el extremo A......................... 42
Figura 3-16: Método Novosel para falla monofásica desde el extremo A ................... 45
Figura 3-17: Método Novosel para falla monofásica desde el extremo B ................... 45
Figura 3-18: Método DF Sincronizado para falla monofásica desde el extremo A ...... 48
Figura 3-19: Método DF Sincronizado para falla bifásica aislada desde el extremo A 48
Figura 3-20: Método DF Sincronizado para falla bifásica a tierra desde el extremo A 48
Figura 3-21: Método DF Sincronizado para falla trifásica desde el extremo A ............ 49
Figura 3-22: Método DF Desincronizado para falla monofásica desde extremo A ...... 51
Figura 3-23: Método DF Desincronizado para falla bifásica aislada desde extremo A 51
Figura 3-24: Método DF Desincronizado para falla bifásica a tierra desde extremo A 52
Figura 3-25: Método DF Desincronizado para falla trifásica desde extremo A ............ 52
Figura 3-26: Método solo corrientes para falla monofásica desde el extremo A ......... 54
Figura 3-27: Método solo corrientes para falla bifásica aislada desde el extremo A ... 54
Figura 3-28: Método solo corrientes para falla bifásica a tierra desde el extremo A ... 55
Figura 3-29: Método solo corrientes para falla trifásica desde el extremo A ............... 55

Estado del arte IX
Figura 4-1: Ejemplo de SOE de una falla ................................................................. 63
Figura 4-2: Red de Petri –RP– identificación de la línea y fase fallada. CPN Tools . 64
Figura 4-3: RP carga de archivo COMTRADE del extremo A. CPN Tools ............... 64
Figura 4-4: RP carga de archivo COMTRADE del extremo B. CPN Tools ............... 65
Figura 4-5: RP priorización de métodos para falla monofásica. CPN Tools ............. 66
Figura 4-6: RP ejecución del método doble fuente sincronizado. CPN Tools ........... 67
Figura 5-1: Ventana de selección del prototipo ........................................................ 70
Figura 5-2: Ventana de impedancias equivalentes ................................................... 71
Figura 5-3: Ventana de resultado del prototipo ........................................................ 71
Figura 5-4: Ventana ejemplo de evaluación de los métodos .................................... 72
Figura B-1: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla monofásica desde el extremo A ..................... 82
Figura B-2: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla monofásica desde el extremo A ........................................ 82
Figura B-3: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla monofásica desde el extremo A ....................................... 83
Figura B-4: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla bifásica desde el extremo A ........................... 83
Figura B-5: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla bifásica desde el extremo A .............................................. 83
Figura B-6: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla bifásica desde el extremo A ............................................. 84
Figura B-7: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla bifásica a tierra desde el extremo A ............... 84
Figura B-8: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla bifásica a tierra desde el extremo A .................................. 84
Figura B-9: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla bifásica a tierra desde el extremo A ................................. 85
Figura B-10: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla trifásica desde el extremo A ........................... 85
Figura B-11: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla trifásica desde el extremo A .............................................. 85
Figura B-12: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla trifásica desde el extremo A ............................................. 86
Figura C-1: Método RP priorización de métodos para fallas bifásicas. CPN Tools ... 87
Figura C-2: Método RP priorización de métodos para fallas trifásicas. CPN Tools ... 88
Figura C-3: RP ejecución del método doble fuente desincronizado. CPN Tools ....... 89
Figura C-4: RP ejecución del método solo corrientes desincronizado. CPN Tools ... 89
Figura C-5: RP ejecución del método distribución de corriente. CPN Tools.............. 90
Figura C-6: RP ejecución del método Eriksson. CPN Tools ..................................... 90
Figura C-7: RP ejecución del método distribución de corriente. CPN Tools.............. 91
Figura C-8: RP ejecución del método reactancia simple. CPN Tools........................ 91
Contenido X
Lista de tablas
Pág. Tabla 2-1: Impedancia aparente para los diferentes tipos de fallas [19] ...................... 12
Tabla 2-2: Parámetros para el cálculo de los valores de tensión y corriente en función
de las componentes simétricas para circuitos sencillos [21] ............................................ 18
Tabla 3-1: Ventajas y desventajas del método de reactancia simple .......................... 34
Tabla 3-2: Ventajas y desventajas del método Takagi ................................................ 37
Tabla 3-3: Ventajas y desventajas del método Takagi modificado .............................. 40
Tabla 3-4: Ventajas y desventajas del método Eriksson ............................................. 43
Tabla 3-5: Ventajas y desventajas del método de doble fuente sincronizado .............. 50
Tabla 3-6: Ventajas y desventajas del método de doble fuente desincronizado .......... 53
Tabla 3-7: Ventajas y desventajas del método de solo corrientes desincronizadas .... 56
Tabla 3-8: Comparativo de datos de entrada de los diferentes métodos [20] .............. 57
Tabla 3-9: Efectividad métodos doble fuente .............................................................. 58
Tabla 3-10: Efectividad métodos de una fuente ........................................................ 59
Tabla 5-1: Disponibilidad de la información para los casos propuestos ...................... 73
Tabla 5-2: Distribución de los diferentes tipos fallas en cada caso ............................. 74
Tabla 5-3: Comparación de la efectividad de los métodos vs sistema propuesto ........ 75
Tabla A-1: Conjunto de coeficientes de ponderación con eliminación de la secuencia
cero y priorizando la secuencia negativa sobre la positiva [21] ....................................... 80
Tabla A-2: Conjunto de coeficientes de ponderación con eliminación de la secuencia
cero y priorizando la secuencia positiva sobre la negativa [21] ....................................... 81
Tabla A-3: Conjunto de coeficientes de ponderación con eliminación de la secuencia
cero y utilizando las secuencias negativa y positiva [21] ................................................. 81

Introducción
Los sistemas de potencia en la actualidad son de vital importancia para la sociedad, debido
a que la vida tal y como se conoce está basada en la utilización de energía eléctrica para
realizar muchas de las actividades del día a día del ser humano adicionalmente, existe una
relación entre el –PIB– y la demanda de energía eléctrica del país [1], es por estas razones
que se convierte en un objetivo prioritario mantener los equipos que componen el sistema
de potencia con la mayor disponibilidad posible, de modo que se preste un servicio con
excelente calidad para los usuarios finales.
Teniendo en cuenta lo anterior, el análisis de la localización de fallas en líneas de
transmisión se vuelve importante para las empresas de transporte de energía, las cuales
conviven a diario con fallas permanentes y fugaces en las líneas. Esto ha llevado a que a
lo largo del tiempo diferentes autores hayan centrado sus esfuerzos investigativos en el
desarrollo de métodos y algoritmos para la localización de fallas en líneas de transmisión,
los cuales generalmente utilizan como variables de entrada datos de impedancia,
corrientes y tensiones. Por otro lado, en la actualidad los valores de corrientes y tensiones
durante las fallas pueden ser obtenidos por medio de registros oscilográficos, generados
por los relés modernos de protección y registradores de fallas, que miden en cada extremo
de la línea de trasmisión las variables de corriente y tensión antes, durante y después de
la falla. Con los métodos y registros oscilográficos, es posible calcular la localización de
todas las fallas (fugaces y permanentes) que se presenten en todo el sistema y reducir los
tiempos de restablecimiento de las líneas de transmisión ante fallas de tipo permanente y
adicionalmente, utilizar la localización de las fallas de tipo fugaz (tales como descargas
atmosféricas), como insumo en el análisis preventivo para el mantenimiento en las líneas.
El procedimiento para el cálculo de localización de la falla se puede realizar manualmente
ingresando los valores de tensiones y corrientes tomados de los registros oscilográficos en
una hoja de cálculo, pero este procedimiento al ser manual aumenta el riesgo de incurrir
en errores de digitación o de interpretación por parte de la persona que realiza el análisis.

2 Introducción
Adicionalmente, una línea de transmisión puede fallar en cualquier momento y el personal
especializado en la realización del cálculo es posible que no se encuentre disponible,
porque se encuentra por fuera de su horario laboral o es fin de semana. Es por esta razón,
que la automatización de este proceso juega un papel importante en la continuidad del
servicio de transporte de energía y busca mantener altos estándares de calidad del
servicio.

1. Estado del arte
Para poder entender el problema que se quiere abordar se hace necesario conocer la
situación actual de la investigación de los métodos de localización de fallas a nivel
internacional, por lo cual se realizó una búsqueda bibliográfica de diversos métodos para
la localización de fallas en líneas de transmisión y así conocer cuáles son las tendencias
a la hora de resolver este problema. Adicionalmente, también se revisaron artículos de
aplicaciones para la localización de fallas en tiempo real o automáticas, buscando detectar
aplicaciones similares a la que se quiere plantear por medio de este trabajo.
Para abordar el tema de la localización de fallas en líneas de transmisión, en primera
instancia, es importante realizar una revisión del cálculo de los parámetros eléctricos en
las líneas, esto se debe principalmente a que los métodos de localización generalmente
se definen a partir de un modelo basado en parámetros eléctricos y por ende se debe tener
completa certeza que los parámetros utilizados (los cuales son una variable definida)
tengan el menor error posible.
1.1 Cálculo de los parámetros eléctricos en líneas de transmisión
Típicamente, el cálculo de los parámetros eléctricos en líneas de transmisión es realizado
a través de una metodología que utiliza los parámetros físicos de las líneas, tales como la
altura de los conductores a tierra, radio de cada uno y separación entre estos como se
muestra la referencia [2], pero se debe tener cuidado a la hora de realizar los cálculos de
los parámetros debido a que se pueden hacer simplificaciones erradas cuando se asumen
consideraciones que puede no ser aplicables para el fenómeno a estudiar [3]. También es
posible realizar una medida real con equipos especializados de los parámetros eléctricos
de una línea de transmisión, pero cuando se tienen líneas de transmisión en operación, no
es fácil que la empresa dueña del equipo programe una salida de la misma solo con el fin
de realizar una prueba de parámetros eléctricos [3].
4 Sistema para la localización automática de fallas en líneas de transmisión
Tomando en cuenta lo descrito en el párrafo anterior, en la bibliografía se encuentran
diversos métodos o algoritmos que permiten realizar el cálculo de los parámetros de las
líneas de transmisión utilizando las medidas de corriente y tensión a ambos lados del
circuito, tales como los definidos en la referencia [4], en la cual se muestran cuatro métodos
para determinar los parámetros de líneas de transmisión cortas mediante la utilización de
medidas sincronizadas. La utilización de las medidas sincronizadas a través de Unidades
de Medición Fasorial o PMU (por sus siglas en inglés) es muy común en la mayoría de los
métodos o algoritmos encontrados [4] [5] [6] [7], pero en la práctica en Colombia, no se
cuenta con este tipo de equipos en todas las bahías de las líneas del sistema de potencia,
por lo cual una opción a considerar es la utilización de los registros oscilográficos de fallas
en formato COMTRADE generados por los relés de protección numéricos, tecnología muy
extendida en Colombia y en el resto del mundo. Pero se debe tener en cuenta, que se
requiere una sincronización de estos registros oscilográficos.
Por otro lado, uno de los problemas existentes con los métodos para el cálculo de los
parámetros eléctricos de las líneas de transmisión es asumir que los valores medidos
utilizados en los cálculos no presentan errores de medida o ruido [4], lo cual no es correcto
debido a que los equipos utilizados para medir, como son los transformadores de corriente
y tensión, presentan errores debido a su construcción y una reducción en el error se ve
reflejada en el aumento considerable en su precio. En la bibliografía se encuentra que el
error de medida puede ser ignorado para ciertos casos [6], pero este concepto se debe
tomar con cautela, porque para eliminar la influencia del ruido eléctrico, debe ser estudiado
el efecto que este puede llegar a tener en el método de cálculo de los parámetros y las
variables que afecta.
Ahora bien, para esto la referencia [8] da una alternativa, demostrando que se pueden
detectar, identificar y remover valores erróneos en la medida, permitiendo mejorar la
precisión en el cálculo de los parámetros.

Estado del arte 5
1.2 Métodos para la localización de fallas en líneas de transmisión
Dentro de la bibliografía revisada se encontraron varios algoritmos para la localización de
fallas en líneas de transmisión, por lo cual solo se mencionan los que se consideran más
importantes por su uso.
Los métodos para la localización de fallas en general pueden ser divididos en tres
categorías: los métodos basados en ondas viajeras, los métodos basados en el uso de
corriente y tensiones de alta frecuencia, y finalmente los métodos que utilizan los valores
de corrientes y tensiones medidas en cada extremo de la línea a la frecuencia fundamental
[9], siendo este último el más usado. Dado que lo que se busca por medio de este trabajo
es utilizar registros oscilográficos en formato COMTRADE, este apartado se enfocará en
la última categoría mencionada.
Los métodos de localización de fallas basadas en las medidas de corriente y tensión a la
frecuencia fundamental a su vez, pueden ser divididos en dos categorías, métodos de
localización desde un extremo y métodos de localización de dos extremos [10].
1.2.1 Métodos de localización desde un extremo
Los autores de la referencia [11] presentan un método para la localización de fallas en
líneas de transmisión utilizando los valores de corrientes y tensiones en un solo extremo,
o los equipos de patio de una sola subestación. A pesar de que el método fue desarrollado
en 1982, es de resaltar del artículo que uno de los grandes inconvenientes encontrados
fue la obtención de los valores digitalizados de la tensión y la corriente, debido al estado
de avance de la tecnología usada en esa época, sin embargo la formulación matemática
del método continua siendo válida y al aplicarla utilizando la tecnología actual (registros
oscilográficos) es muy útil. Como ventaja principal, el método utiliza solo los valores de un
extremo, sin que se requiera un proceso de sincronización con los equipos del otro extremo
de la línea de transmisión lo cual dificulta los cálculos.
Se observa que las redes de transmisión a nivel mundial tienden a ser enmalladas, no solo
una línea de transmisión de energía entre dos subestaciones sino varias, las cuales en
caso de falla en una de estas las otras funcionan como una fuente que aporta corriente a

6 Sistema para la localización automática de fallas en líneas de transmisión
su falla. En algunos casos existen líneas de transmisión conectadas de manera radial,
donde solo se tienen los equipos de medida en una sola subestación, lo cual es más común
en la redes de distribución de energía eléctrica, por lo tanto al revisar los algoritmos para
este tipo de redes se encuentra la existencia de algunos con aplicación en las líneas de
transmisión.
En las referencias [9] y [12], los autores presentan algoritmos de localización con
resultados de cálculos matemáticos a partir de los datos de un extremo de la línea fallada
y como resultado presentan un buen desempeño en la localización para fallas de alta
impedancia, de hasta incluso 200 ohmios, valor de ocurrencia muy poco probable [12]. El
anterior resultado es muy importante porque los algoritmos de localización están muy
influenciados por la resistencia de falla, puesto que es imposible medirla directamente y
adicionalmente es variable a lo largo del tiempo de la falla.
1.2.2 Métodos de localización de dos extremos
El método expuesto en la referencia [10] aplica un método particular utilizando la red de
secuencia negativa obteniendo una alta precisión en las localizaciones. Ahora bien, para
este método a diferencia de otros métodos de localización de doble extremo, donde existe
el inconveniente asociado a la necesidad de la sincronización de los registros medidos en
cada uno, no se requiere sincronización debido a que se trabaja con las componentes de
secuencia negativa presentes en cada subestación. Como elemento adicional también se
puede realizar el cálculo de la impedancia de la falla, lo cual puede brindar información
adicional del origen de la misma, si es vegetación o por otro quemas debajo del circuito, y
con base en esto tomar la decisión de realizar o no una búsqueda de la evidencia de falla
con el fin de solucionarla o realizar las acciones correctivas del caso para minimizar de
nuevo su ocurrencia.
Al igual que con el cálculo de los parámetros eléctricos, dentro de los algoritmos de
localización de fallas, también se encuentra que las PMU son ampliamente utilizadas en
los métodos de localización de fallas, en particular cuando se requiere realizar la
sincronización de las medidas fasoriales en ambos extremos de la línea [13], pero continua
existiendo el problema de la poca cantidad de PMU instaladas en los sistemas de potencia.
Estado del arte 7
1.3 Otros métodos de localización de fallas
También se deben tener en cuenta los métodos de localización de fallas basados en
técnicas diferentes a las que utilizan la componente fundamental de las señales de
corriente y tensión como lo son los métodos basados en ondas viajeras, los cuales
presentan muy buenos resultados y continúan siendo investigados y mejorados como es
el caso presentado en la referencia [14].
En general, dentro de la bibliografía existen distintos métodos o algoritmos utilizados para
la localización de fallas en líneas de transmisión, donde cada uno por separado presenta
una serie de características propias buenas y malas que si son utilizados de manera
conjunta, pueden llegar a construir un sistema muy robusto con combinación de las
principales fortalezas de cada método, mitigando sus defectos individuales.
1.4 Sincronización de registros de fallas
La sincronización de las medidas realizadas por los relés de protección cuando se produce
una falla, en teoría es un tema resuelto, dado que en las subestaciones se cuenta con GPS
que proveen una estampa de tiempo a los relés y por lo tanto no habría necesidad de
realizar una sincronización posterior, pero en la práctica esto no es tan cierto, dado que los
GPS fallan y al revisar la cantidad de registros sincronizados con respecto a los que no lo
estan, los primeros son la minoría [15].
Es por este motivo que se requieren técnicas para la sincronización de los registros
oscilográficos entregados por los relés de protección o por registradores de fallas
instalados en las subestaciones. En la literatura no es muy común encontrar este tipo de
técnicas pero en la referencia [15] se describe una metodología en la cual se realiza el
modelamiento de la línea de transmisión y este modelo se utiliza para la sincronización de
los registros con diferencias de tiempos iniciales de hasta segundos.
Por otro lado, existe la posibilidad de desarrollar algoritmos de sincronización a través del
procesamiento digital de imágenes, de forma que al procesar la imagen de los registros
oscilográficos de una falla se pueda detectar el inicio del evento y contrastarlos con el
extremo remoto y de esta manera identificar un mismo punto en los dos registros. En este
trabajo no se trabajará la sincronización de los registros, por lo cual no se profundizará en

8 Sistema para la localización automática de fallas en líneas de transmisión
este tema y se considerará que los registros ya vienen sincronizados desde la fuente. Este
podría ser una investigación futura a este trabajo.
1.5 Aplicaciones de localización de fallas en tiempo real
Tomando en cuenta lo expuesto hasta el momento, a nivel internacional se está realizando
la investigación en la automatización de la localización de fallas en sistemas de potencia,
encontrando que existe una investigación en la que se diseñó un sistema que a partir de
los registros de los relés de protección y los registradores de falla identifica la línea fallada
y determina el tipo de falla y su localización y puede llegar a entregar la información en
menos de un minuto sin que se requiera la intervención humana y con una alta precisión,
donde esto lo demuestran con una prueba con un sistema real [16].
Por otro lado también se ha investigado un algoritmo para la localización de fallas en
tiempo real en redes de distribución, el cual está basado en el cálculo de flujos de potencia
para lo cual usa los datos de tensión y corriente de pre-falla y post-falla que de acuerdo
con los autores presenta una alta precisión [17]. También se ha llegado al punto de utilizar
la información de área amplia, lo cual permite en sistemas muy complejos identificar la
localización de fallas simultáneas en diferentes ubicaciones [18].
Hasta el momento, en este documento se ha realizado una descripción del estado del arte
acerca del tema de localización de fallas, pasando desde el cálculo de los parámetros de
las líneas de transmisión, por los tipos de algoritmos de localización de fallas,
sincronización de registros hasta aplicaciones en tiempo real para la localización de fallas,
encontrando que existe una variedad de métodos que permiten realizar la localización de
fallas en sistemas de potencia y cada uno cuenta con características propias
diferenciadoras, y es por este motivo que antes de escoger el mejor método de localización
se debe tener en cuenta cuál es el que mejor se amolda a las características del sistema
de potencia bajo análisis.
Por otro lado, las aplicaciones de localización de fallas en tiempo real muestran que el
avance de la tecnología permite implementar nuevas maneras de aplicar los conceptos
teóricos de métodos de localización desarrollados en el pasado y cuya fundamentación
teórica continua vigente.

2. Métodos de localización de fallas
Como se mencionó anteriormente, este trabajo buscar desarrollar un sistema automático
para la localización de fallas en líneas de transmisión por medio de la utilización de
diferentes métodos o algoritmos de localización de fallas que han sido desarrollados en la
literatura mundial. Es por esta razón que en este capítulo se describirán diferentes métodos
de localización de fallas que serán utilizados en este trabajo con el fin de desarrollar el
sistema propuesto. Este trabajo va muy de la mano con el documento IEEE Guide for
Determining Fault Location on AC Transmission and Distribution Lines (IEEE Std
C37.114™-2014) [19], el cual fue publicado en 2015 y tiene como uno de sus propósitos,
ayudar a los ingenieros y operadores de las empresas de transporte de energía en la
aplicación de métodos de localización de falla en sus sistemas. Adicionalmente, es
complementado con la investigación realizada en la referencia [20] y el libro Fault Location
on Power Networks [21], en los cuales se analizan diversos métodos para localización de
fallas en líneas de transmisión.
Para poder entender los métodos de un extremo explicados a continuación, es importante
que iniciar con una breve descripción del principio en que estos se basan. Para esto, en
primera instancia se analiza la siguiente figura, en la cual se muestra el diagrama unifilar
para una falla en una línea de transmisión.
Figura 2-1: Diagrama unifilar de una línea de transmisión en falla [20]

10 Sistema para la localización automática de fallas en líneas de transmisión
En este diagrama se observa que la línea tiene una impedancia 𝑍𝐿1 y en cada extremo de
la línea (Terminales S y R) hay un equivalente Thevenin el cual representa el resto del
sistema. La variable x representa la distancia a la falla en por unidad desde el terminal S y
𝑅𝐹 es la resistencia de la falla. Teniendo esto claro y aplicando las leyes Kirchhoff, la
tensión en el extremo S se puede expresar de la siguiente manera [20]:
𝑉𝑆 = 𝑥𝑍𝐿1𝐼𝑆 + 𝑅𝐹𝐼𝐹 (1)
Y al dividir por 𝐼𝑆 ambos lados de la ecuación se tiene lo siguiente:
𝑍𝑎𝑝𝑎𝑟𝑒𝑛𝑡𝑒 =𝑉𝑆
𝐼𝑆= 𝑥𝑍𝐿1 + 𝑅𝐹 (
𝐼𝐹
𝐼𝑆) (2)
De acuerdo con la referencia [20], la ecuación 2 es la ecuación sobre la cual se basan los
algoritmos de un solo extremo, esta misma referencia indica que este principio cuenta con
muchas incógnitas 𝑥, 𝑅𝐹 y 𝐼𝐹 y por ende lo que buscan los diferentes métodos de
localización de un extremo es eliminar los valores de 𝑅𝐹 y 𝐼𝐹 con el fin de poder calcular
el valor de 𝑥.
Otro punto importante a tener en cuenta en la ecuación 2 es el término 𝑅𝐹 (𝐼𝐹
𝐼𝑆), el cual
depende de la relación entre la corriente a través de la resistencia de falla 𝐼𝐹 y la corriente
medida en el terminal S, 𝐼𝑆, debido a que si estas dos corrientes no están en fase la
resistencia de falla puede ser vista como una impedancia (𝑍𝐹 = 𝑅𝐹 + 𝑗𝑋𝐹) [19]
Dado lo anterior, en la referencia [19] se indica que para analizar que parámetros afectan
el ángulo resultante de la relación 𝐼𝐹
𝐼𝑆, se realiza una separación de las componentes de
pre-falla y falla por medio del principio de superposición, resultando la siguiente ecuación:
𝑍𝑎𝑝𝑎𝑟𝑒𝑛𝑡𝑒 =𝑉𝑆
𝐼𝑆= 𝑥𝑍𝐿1 + 𝑅𝐹 (
1
𝑑𝑠𝑛𝑠) (3)
Donde:

Métodos de localización de fallas 11
Factor de distribución de corriente:
𝑑𝑠 = ∆𝐼𝐺
𝐼𝐹=
𝑍𝑅+(1−𝑥)𝑍𝐿1
𝑍𝑅+𝑍𝐿1+𝑍𝑠= |𝑑𝑠|∡𝛽 (4)
Factor de carga del circuito:
𝑛𝑠 = 𝐼𝐺
∆𝐼𝐺=
𝐼𝐺
𝐼𝐺+𝐼𝐿= |𝑛𝑠|∡𝛾 (5)
Como se puede notar en las ecuaciones 4 y 5, el factor de distribución de corriente depende
las impedancias del sistema, mientras que el factor de carga del circuito está relacionado
con la corriente de carga que se alimenta a través de la línea de transmisión, y por ende
la suma de los ángulos 𝛽 𝑦 𝛾 será la que definirá la parte imaginaria del segundo término
de la ecuación (3) [19] y el efecto sobre la medida de la impedancia aparente medida desde
un extremo de la línea se muestra en la siguiente figura.
Figura 2-2: Errores ocasionados por resistencia de falla en circuito [19]
Lo anteriormente descrito servirá de base para explicar los métodos basados en
impedancia que se analizaran a continuación.
2.1 Método de reactancia simple
El método de reactancia simple está basado en la formulación matemática para el cálculo
de la impedancia aparente desde un extremo de una línea de transmisión, con el cual se

12 Sistema para la localización automática de fallas en líneas de transmisión
puede calcular la localización de cualquier tipo de falla. Para esto se utilizan las medidas
vectoriales de corriente y tensión (fase a tierra para falla monofásica a tierra y fase a fase
para fallas multifásicas), adicionalmente, para las fallas monofásica es necesario contar
con el factor de compensación de puesta a tierra 𝑘0, el cual es una relación entre las
impedancias de secuencia cero y positiva de la línea donde se ubica la falla [19].
En la siguiente tabla se muestra la formulación matemática para el cálculo de cada tipo de
falla. La demostración matemática para llegar a las ecuaciones de la tabla 2.1 son
desarrolladas en la referencia [22].
Tabla 2-1: Impedancia aparente para los diferentes tipos de fallas [19]
Ecuación Tipo de falla Impedancia aparente medida
6 Fase A a tierra 𝑉𝑎
𝐼𝑎 + 𝑘0 ∙ 𝐼𝐸
7 Fase B a tierra 𝑉𝑏
𝐼𝑏 + 𝑘0 ∙ 𝐼𝐸
8 Fase C a tierra 𝑉𝑐
𝐼𝑐 + 𝑘0 ∙ 𝐼𝐸
9 Fases A-B y A-B a tierra 𝑉𝑎 − 𝑉𝑏
𝐼𝑎 − 𝐼𝑏
10 Fases B-C y B-C a tierra 𝑉𝑏 − 𝑉𝑐
𝐼𝑏 − 𝐼𝑐
11 Fases C-A y C-A a tierra 𝑉𝑐 − 𝑉𝑎
𝐼𝑐 − 𝐼𝑎
Fases A-B-C Se puede utilizar cualquiera de las ecuaciones 9, 10 y 11 de esta tabla.
Donde:
𝑘0 =𝑍0𝐿−𝑍1𝐿
3∙𝑍1𝐿 (12)
𝑍1𝐿 = 𝐼𝑚𝑝𝑒𝑛𝑑𝑎𝑐𝑖𝑎 𝑑𝑒 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎 𝑝𝑜𝑠𝑖𝑡𝑖𝑣𝑎 𝑑𝑒 𝑙𝑎 𝑙í𝑛𝑒𝑎 𝑍0𝐿 = 𝐼𝑚𝑝𝑒𝑛𝑑𝑎𝑐𝑖𝑎 𝑑𝑒 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎 𝑐𝑒𝑟𝑜 𝑑𝑒 𝑙𝑎 𝑙í𝑛𝑒𝑎 𝐼𝐸 = 𝐶𝑜𝑟𝑟𝑖𝑒𝑛𝑡𝑒 𝑟𝑒𝑠𝑖𝑑𝑢𝑎𝑙 (3𝐼0)

Métodos de localización de fallas 13
Tendiendo claro lo anterior se puede explicar mejor el método de reactancia simple, el cual
utiliza solo la parte imaginaria del cálculo de la impedancia definido en la tabla 2.1 y lo
compara con la reactancia de secuencia positiva de la línea de transmisión, este método
asume que la corriente en el punto de la falla está en fase con la corriente medida en el
extremo del circuito, lo cual no siempre es cierto [19]. La formulación matemática se
muestra a continuación:
𝐿𝑜𝑐𝑎𝑙𝑖𝑧𝑎𝑐𝑖ó𝑛 [𝑝. 𝑢. ] =𝑖𝑚𝑎𝑔𝑖𝑛𝑎𝑟𝑖𝑜 (𝑖𝑚𝑝𝑒𝑑𝑎𝑛𝑐𝑖𝑎 𝑎𝑝𝑎𝑟𝑒𝑛𝑡𝑒 𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑎)
𝑖𝑚𝑎𝑔𝑖𝑛𝑎𝑟𝑖𝑜 (𝑖𝑚𝑝𝑒𝑛𝑑𝑎𝑐𝑖𝑎 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎 𝑝𝑜𝑠𝑖𝑡𝑖𝑣𝑎 𝑑𝑒 𝑙𝑎 𝑙í𝑛𝑒𝑎) (13)
Como se puede notar, este método es muy sencillo de implementar debido a que solo
requiere de las medidas de tensión y corriente en un extremo del circuito fallado y los
valores de impedancia de secuencia positiva y cero de la línea. Otra de las ventajas que
presenta este método es que cuando la resistencia de la falla es cero (falla franca) el error
puede llegar a cero pero en este mismo sentido si la resistencia de falla aumenta, se
pueden introducir errores grandes en la localización debido al efecto reactancia [19]. De
acuerdo con el la referencia [19], el efecto reactancia radica en la relación que existe entre
la corriente de falla y la corriente en el extremo de línea donde se realiza la medición de la
impedancia aparente, indicando que si ésta relación es un número complejo la resistencia
de falla se puede representar como una impedancia y por ende con una componente
reactiva (inductiva o capacitiva) la cual afectaría el cálculo de localización de la falla. La
misma referencia indica que el efecto reactivo en la resistencia de falla se elimina si la
corriente de aporte a la falla en el extremo remoto a la medida es cero (circuito radial) o
está en fase con la corriente del extremo local, esto ocasiona que al realizar el cálculo de
la impedancia aparente la única componente reactiva presente sea la del tramo de la línea
entre la falla y el extremo en que se realiza la medida. Teniendo todo esto en mente a
continuación se muestra una tabla resumen con las ventajas y desventajas que presenta
el método de reactancia simple.
2.2 Método Takagi
El segundo método de localización de fallas bajo análisis en este documento es el método
de Takagi, el cual fue publicado en el año de 1982 y en su momento una de las limitantes
era la tecnología a utilizar para obtener los registros oscilográficos y por ende los valores

14 Sistema para la localización automática de fallas en líneas de transmisión
de corriente y tensión antes y durante la falla [11]. Este método es una mejora al método
de reactancia simple ya que de acuerdo con el artículo donde fue expuesto, los errores
ocasionados por el flujo de carga de pre-falla, la resistencia de falla y la disposición
asimétrica de la línea de transmisión son corregidos. El método de Takagi plantea la
siguiente ecuación para el cálculo de la localización de la falla:
𝑥 =𝐼𝑚(𝑉𝑠∙∆𝐼𝑠
∗)
𝐼𝑚(𝑍𝐿∙𝐼𝑠∙∆𝐼𝑠∗)
(14)
Donde:
𝑉𝑠 es el tensión durante la falla
∆𝐼𝑠∗ es la diferencia entre la corriente durante la falla y la corriente de pre-falla
𝐼𝑠 es la corriente durante la falla
𝑍𝐿 es la impedancia de la línea de transmisión
Este método asume que la red de transmisión es homogénea, lo cual quiere decir que el
ángulo de las impedancias equivalentes a cada extremo de la línea son iguales al ángulo
de la impedancia de línea, por lo tanto el porcentaje de error será proporcional al grado de
no homogeneidad del sistema bajo análisis [20]. Adicionalmente, como se puede observar
en la formulación del método, no es necesario conocer la impedancia de los equivalentes
Thevenin en cada extremo del circuito. La referencia [19], también indica que al realizar el
cálculo de la localización será mejor utilizar el extremo más fuerte, dado que el ángulo del
factor de distribución de corriente tenderá a cero.
La ventaja que tiene el método Takagi con respecto al método de reactancia simple radica
simplemente en que el primero trata de eliminar la corriente de carga del sistema utilizando
el principio de superposición, lo cual elimina una de las causas de error que presenta el
método de reactancia simple.
2.3 Método Takagi modificado
El tercer método analizado, es una modificación del método explicado en el numeral 2.2.
El método Takagi modificado a diferencia del anterior, utiliza la corriente residual 𝐼𝐸 en vez

Métodos de localización de fallas 15
de ∆𝐼𝐺 y el ángulo β con el fin de considerar la no homogeneidad de las impedancias de
la línea y los equivalentes de Thevenin, esto se muestra en la ecuación 15 [19].
𝑥 =𝐼𝑚(𝑉𝑠∙𝐼𝐸
∗ ∙𝑒−𝑗𝛽)
𝐼𝑚(𝑍𝐿∙𝐼𝑠∙𝐼𝐸∗ ∙𝑒−𝑗𝛽)
(15)
De acuerdo con la referencia [20], para hallar el valor de β primero se calcula un valor
estimado de la localización de la falla utilizando la siguiente ecuación:
𝑥 =𝐼𝑚(𝑉𝑠∙3𝐼𝑠0
∗ )
𝐼𝑚(𝑍𝐿∙𝐼𝑠∙3𝐼𝑠0∗ )
(16)
Y luego con el valor x calculado en la ecuación (16) se calcula el factor de distribución de
corriente 𝑑𝑠, por medio de la siguiente ecuación, en la cual se encuentra el ángulo β:
|𝑑𝑠|∡𝛽 =𝑍𝑅0+(1−𝑥)𝑍𝐿0
𝑍𝑅0+𝑍𝐿0+𝑍𝑠0 (17)
2.4 Método Eriksson
Al igual que con el método Takagi modificado, el método Eriksson requiere de la
impedancias de las fuentes con el fin de poder eliminar los errores ocasionados por la
resistencia de falla, la carga y la no homogeneidad del sistema pero adicionalmente
muestra una alternativa para el cálculo resistencia de falla [20]. Este método, simplemente
reemplaza la ecuación (4) en (3), y al reordenar y simplificar, obtiene una ecuación
cuadrática de la siguiente forma [20]:
𝑥2 − 𝑘1𝑥 + 𝑘2 − 𝑘3𝑅𝐹 = 0 (18)
Donde:
𝑘1 = 𝑎 + 𝑗𝑏 = 1 +𝑍𝑅1
𝑍𝐿1+
𝑉𝑠
𝑍𝐿1∙𝐼𝑠 (19)
16 Sistema para la localización automática de fallas en líneas de transmisión
𝑘2 = 𝑐 + 𝑗𝑑 =𝑉𝑠
𝑍𝐿1∙𝐼𝑠∙ (1 +
𝑍𝑅1
𝑍𝐿1) (20)
𝑘3 = 𝑒 + 𝑗𝑓 =∆𝐼𝑠
𝑍𝐿1∙𝐼𝑠∙ (1 +
𝑍𝑅1+𝑍𝑠1
𝑍𝐿1) (21)
Al resolver la ecuación cuadrática se tiene que:
𝑥 =(𝑎−
𝑒𝑏
𝑓)±√(𝑎−
𝑒𝑏
𝑓)
2−4(𝑐−
𝑒𝑑
𝑓)
2 (22)
Adicionalmente, como ya se mencionó por medio de este método se puede calcular la
resistencia de la falla por medio de la siguiente ecuación:
𝑅𝐹 =𝑑−𝑥𝑏
𝑓 (23)
Por medio del método Eriksson, se puede calcular la localización de fallas trifásica, bifásica
aisladas y a tierra y monofásicas [23], por lo cual puede ser de mayor ayuda que el método
Takagi modificado, el cual solo puede calcular localizaciones de fallas con componente a
tierra dado que utiliza la corriente de secuencia cero para calcular un valor preliminar de la
localización y así hallar el ángulo β.
2.5 Método Novosel
Este es un método diseñado para redes de distribución en el cual se tiene una carga
conectada al final de la línea, por medio de cual además de la localización de falla también
se puede calcular la resistencia de la falla [24], esto resulta bastante interesante, debido a
que por medio de la resistencia de falla es posible identificar la causa de la falla (descarga
atmosférica, quema de vegetación, vegetación, entre otras causas). De acuerdo con la
referencia [20], el primer paso para la aplicación de este método es el cálculo de la
impedancia de carga, para lo cual se puede utilizar la siguiente expresión:
𝑍𝐿𝑜𝑎𝑑 =𝑉𝑠1_𝑝𝑟𝑒𝑓𝑎𝑙𝑙𝑎
𝐼𝑠1_𝑝𝑟𝑒𝑓𝑎𝑙𝑙𝑎− 𝑍𝐿1 (24)

Métodos de localización de fallas 17
Y una vez obtenido el valor de la impedancia de carga se debe utilizar la expresión 22, con
los siguientes valores de a, b c, d, e y f:
𝑘1 = 𝑎 + 𝑗𝑏 = 1 +𝑍𝐿𝑜𝑎𝑑
𝑍𝐿1+
𝑉𝑠
𝑍𝐿1∙𝐼𝑠 (25)
𝑘2 = 𝑐 + 𝑗𝑑 =𝑉𝑠
𝑍𝐿1∙𝐼𝑠∙ (1 +
𝑍𝐿𝑜𝑎𝑑
𝑍𝐿1) (26)
𝑘3 = 𝑒 + 𝑗𝑓 =∆𝐼𝑠
𝑍𝐿1∙𝐼𝑠∙ (1 +
𝑍𝐿𝑜𝑎𝑑+𝑍𝑠1
𝑍𝐿1) (27)
De acuerdo con las referencias [20] y [24], este método está diseñado para redes radiales
por lo cual presenta una gran limitación en el sentido de que no puede ser utilizado para
localizar fallas en líneas de transmisión las cuales presenten fuente en ambos extremos.
A pesar de esto, se le realizaran pruebas en líneas de transmisión con fuentes en sus dos
extremos con el fin de evaluar su desempeño.
2.6 Método de localización con factores de distribución de corriente de falla
En la referencia [21], se presenta una formulación matemática para la localización de fallas
en líneas de transmisión basada en el algoritmo de Takagi [11], pero aplicado a redes
trifásicas. De acuerdo con la referencia mencionada, la corriente total de falla se calcula
con la ecuación 28:
𝐼𝐹 = 𝑎𝐹0𝐼𝐹0 + 𝑎𝐹1𝐼𝐹1 + 𝑎𝐹2𝐼𝐹2 (28)
Donde 𝑎𝐹0, 𝑎𝐹1 y 𝑎𝐹2 son los coeficientes de ponderación para el cálculo de la corriente
total de falla (ver anexo A) y 𝐼𝐹0, 𝐼𝐹1 y 𝐼𝐹2 son las componentes de secuencia de la
corriente total de falla.
A partir de estas ecuaciones (1 y 28) la referencia [21] llega a la siguiente expresión para
el cálculo de la localización de falla:
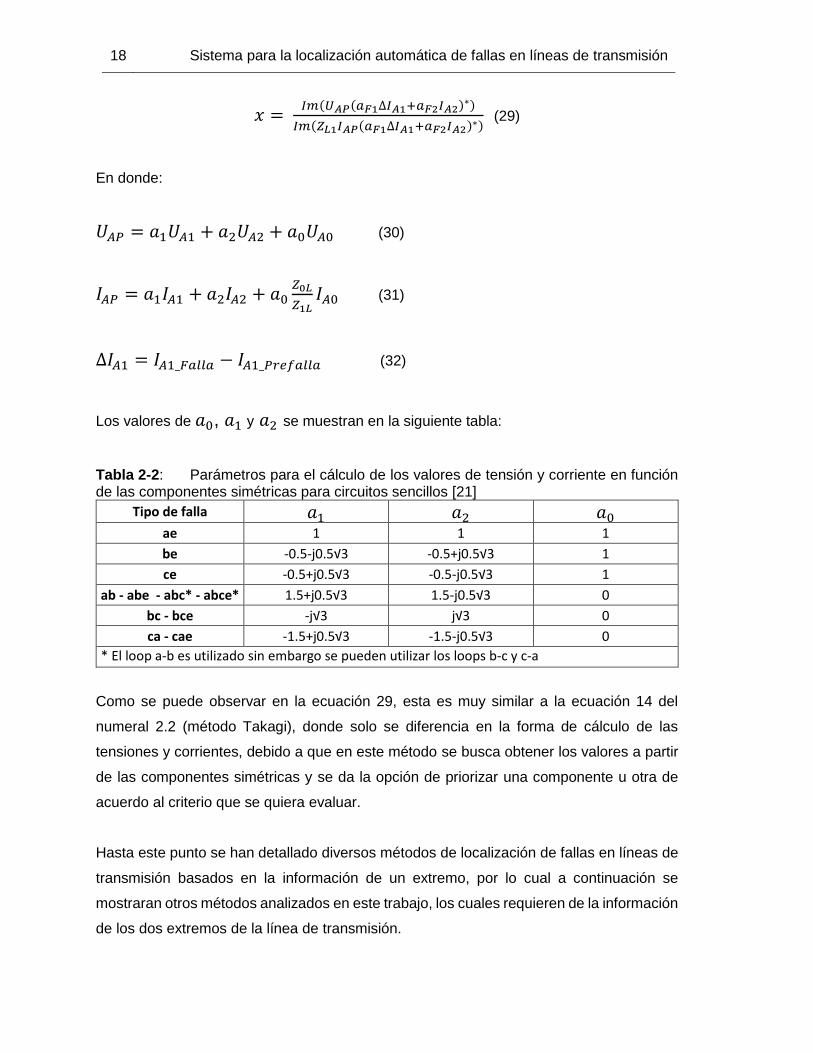
18 Sistema para la localización automática de fallas en líneas de transmisión
𝑥 = 𝐼𝑚(𝑈𝐴𝑃(𝑎𝐹1∆𝐼𝐴1+𝑎𝐹2𝐼𝐴2)∗)
𝐼𝑚(𝑍𝐿1𝐼𝐴𝑃(𝑎𝐹1∆𝐼𝐴1+𝑎𝐹2𝐼𝐴2)∗) (29)
En donde:
𝑈𝐴𝑃 = 𝑎1𝑈𝐴1 + 𝑎2𝑈𝐴2 + 𝑎0𝑈𝐴0 (30)
𝐼𝐴𝑃 = 𝑎1𝐼𝐴1 + 𝑎2𝐼𝐴2 + 𝑎0𝑍0𝐿
𝑍1𝐿𝐼𝐴0 (31)
∆𝐼𝐴1 = 𝐼𝐴1_𝐹𝑎𝑙𝑙𝑎 − 𝐼𝐴1_𝑃𝑟𝑒𝑓𝑎𝑙𝑙𝑎 (32)
Los valores de 𝑎0, 𝑎1 y 𝑎2 se muestran en la siguiente tabla:
Tabla 2-2: Parámetros para el cálculo de los valores de tensión y corriente en función de las componentes simétricas para circuitos sencillos [21]
Tipo de falla 𝑎1 𝑎2 𝑎0
ae 1 1 1
be -0.5-j0.5√3 -0.5+j0.5√3 1
ce -0.5+j0.5√3 -0.5-j0.5√3 1
ab - abe - abc* - abce* 1.5+j0.5√3 1.5-j0.5√3 0
bc - bce -j√3 j√3 0
ca - cae -1.5+j0.5√3 -1.5-j0.5√3 0
* El loop a-b es utilizado sin embargo se pueden utilizar los loops b-c y c-a
Como se puede observar en la ecuación 29, esta es muy similar a la ecuación 14 del
numeral 2.2 (método Takagi), donde solo se diferencia en la forma de cálculo de las
tensiones y corrientes, debido a que en este método se busca obtener los valores a partir
de las componentes simétricas y se da la opción de priorizar una componente u otra de
acuerdo al criterio que se quiera evaluar.
Hasta este punto se han detallado diversos métodos de localización de fallas en líneas de
transmisión basados en la información de un extremo, por lo cual a continuación se
mostraran otros métodos analizados en este trabajo, los cuales requieren de la información
de los dos extremos de la línea de transmisión.

Métodos de localización de fallas 19
2.7 Método de localización de dos extremos sincronizados
Al igual que los métodos de localización de un extremo, los métodos de dos extremos
analizados en este trabajo son los basados en impedancia y se pueden clasificar en
sincronizados y no sincronizados [20], pero ambos se basan en el mismo principio
matemático que se muestra a continuación [19]:
Figura 2-3: Unifilar y circuito equivalente de una línea de transmisión [19].
A partir del circuito equivalente de la Figura 2-3 se pueden obtener 2 ecuaciones a partir
de las dos mallas que se presentan a lado y lado de la falla.
𝑉𝑆 = 𝑥𝑍𝐿1𝐼𝑆 + 𝑉𝐹 (33)
𝑉𝑅 = (1 − 𝑥)𝑍𝐿1𝐼𝑅 + 𝑉𝐹 (34)
Donde 𝑉𝐹 es la tensión en el punto donde se presenta la falla. Al tener dos ecuaciones con
dos incógnitas 𝑉𝐹 y x, reemplazamos 𝑉𝐹 y se obtiene la siguiente ecuación:
𝑥 = 𝑉𝑆−𝑉𝑅+𝑍𝐿1𝐼𝑅
𝑍𝐿1(𝐼𝑆+𝐼𝑅) (35)

20 Sistema para la localización automática de fallas en líneas de transmisión
Como se puede observar en la ecuación 35, por medio de esta ecuación se puede
encontrar el valor de la localización (x) de una falla en una línea de transmisión, dado que
todos los valores de la ecuación son conocidos, pero para poder llegar a un resultado
certero, los valores de corrientes y tensiones de ambos extremos deben estar
sincronizados.
Por otro lado, para realizar el cálculo es posible utilizar las componentes simétricas
(secuencia cero, positiva y negativa) y dependiendo de la componente que se utilice se
tendrán unos u otros beneficios [20]. De acuerdo con la referencia [20], utilizando las
valores de tensiones y corrientes de secuencia positiva no se requiere conocer de ante
mano el tipo de falla que se presentó para poder realizar el cálculo, como sucede con los
métodos de un extremo explicados anteriormente, pero dado que la red de secuencia
negativa es la que más ventajas ofrece debido a que no se tiene que lidiar con problemas
de carga del circuito, acoples mutuos, entre otros inconvenientes, esta es la más
recomendada para realizar el cálculo de localización, con el único inconveniente de que la
red de secuencia negativa se encuentra en todas las fallas excepto en la falla trifásica, por
lo cual se hace necesario que para este tipo de falla se utilicen exclusivamente valores de
corriente y tensión de secuencia positiva.
Dado lo planteado anteriormente, dentro de este trabajo se aplicará este procedimiento
utilizando los valores de secuencia negativa para calcular la localización de fallas
monofásicas y bifásicas aisladas y a tierra y valores de secuencia positiva para calcular la
localización de fallas trifásicas.
Dicho lo anterior, se puede decir que es muy sencillo realizar el cálculo de la localización
por medio de los registros sincronizados, considerando que generalmente en las
subestaciones se cuenta con GPS los cuales tienen una misma referencia y por ende tanto
registradores de fallas como relés de protección se encuentran sincronizados a este, pero
la realidad es un poco distinta.
De acuerdo con la experiencia vivida por el autor de este documento al realizar análisis de
fallas, a pesar de contar con GPS en las subestaciones, los registros oscilográficos
generados por relés de protección y registradores de fallas generalmente no están
sincronizados con el nivel de precisión necesario para poder realizar el cálculo de la
Métodos de localización de fallas 21
localización. De acuerdo con [19], diferencias de milisegundos (de acuerdo con las figuras
mostradas en la referencia [19] valores entre los 4 y los 6 milisegundos) pueden afectar en
gran medida el resultado de la localización, por lo tanto, este puede llegar a ser un
problema bastante importante que puede introducir un error considerable.
Ahora bien, en la referencia [25] se describe una técnica para localización de fallas por
medio de los datos de los dos extremos de la línea sin necesidad de que estén
sincronizados, cuya importancia radica en la metodología o algoritmo que se planteada, la
cual a partir de datos desincronizados estos puedan ser sincronizados por medio de un
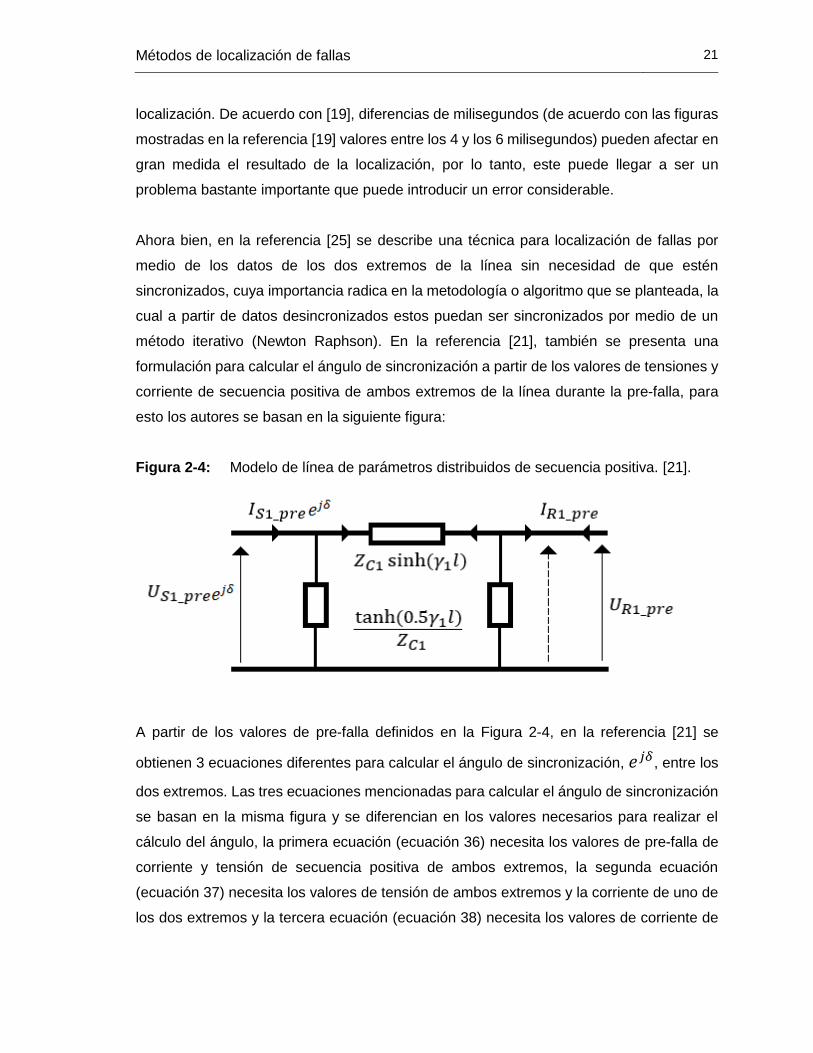
método iterativo (Newton Raphson). En la referencia [21], también se presenta una
formulación para calcular el ángulo de sincronización a partir de los valores de tensiones y
corriente de secuencia positiva de ambos extremos de la línea durante la pre-falla, para
esto los autores se basan en la siguiente figura:
Figura 2-4: Modelo de línea de parámetros distribuidos de secuencia positiva. [21].
A partir de los valores de pre-falla definidos en la Figura 2-4, en la referencia [21] se
obtienen 3 ecuaciones diferentes para calcular el ángulo de sincronización, 𝑒𝑗𝛿, entre los
dos extremos. Las tres ecuaciones mencionadas para calcular el ángulo de sincronización
se basan en la misma figura y se diferencian en los valores necesarios para realizar el
cálculo del ángulo, la primera ecuación (ecuación 36) necesita los valores de pre-falla de
corriente y tensión de secuencia positiva de ambos extremos, la segunda ecuación
(ecuación 37) necesita los valores de tensión de ambos extremos y la corriente de uno de
los dos extremos y la tercera ecuación (ecuación 38) necesita los valores de corriente de

22 Sistema para la localización automática de fallas en líneas de transmisión
los dos extremos y la tensión de uno de los dos extremos. A continuación se muestran las
tres ecuaciones definidas en la referencia [21]:
𝑒𝑗𝛿 =−𝑍𝐶1𝐼𝑅1_𝑝𝑟𝑒+tanh(0.5𝛾1𝑙)𝑈𝑅1_𝑝𝑟𝑒
𝑍𝐶1𝐼𝑆1_𝑝𝑟𝑒+tanh(0.5𝛾1𝑙)𝑈𝑆1_𝑝𝑟𝑒 (36)
𝑒𝑗𝛿 =𝑈𝑅1_𝑝𝑟𝑒
cosh(𝛾1𝑙)𝑈𝑆1_𝑝𝑟𝑒−𝑍𝐶1 sinh(𝛾1𝑙)𝐼𝑆1_𝑝𝑟𝑒 (37)
𝑒𝑗𝛿 =−𝑍𝐶1𝐼𝑅1_𝑝𝑟𝑒
− sinh(𝛾1𝑙)𝑈𝑆1_𝑝𝑟𝑒+cosh(𝛾1𝑙)𝑍𝐶1𝐼𝑆1_𝑝𝑟𝑒 (38)
Teniendo en cuenta lo sencillo del método de sincronización definido en la referencia [21]
principalmente, la utilización de métodos de dos extremos sincronizados se vuelve más
aplicable en la industria. Por lo tanto, en este trabajo se utilizarán las ecuaciones 36, 37 y
38 para sincronizar registros que tengan una estampa de tiempo con un diferencia menor
a un ciclo (16.666 ms), debido a que de acuerdo a lo analizado, este método de
sincronización no funcionaría si la desincronización es mayor a un ciclo.
Un tema que obligatoriamente se debe tocar en lo relacionado con la sincronización es la
utilización de PMU´s, pero debido a que esta tecnología aún no está muy extendida en
Colombia y que se requiere de una PMU en cada bahía del sistema de potencia con el fin
de poder realizar el cálculo en todas las líneas del sistema, en este trabajo no se optó por
considerar métodos basados en PMU´s.
2.8 Método de dos extremos desincronizados
A diferencia del método presentado en el numeral anterior, la referencia [21], presenta un
método de localización que elimina la necesidad de sincronizar los registros de fallas, el
cual se basa en la siguiente figura.

Métodos de localización de fallas 23
Figura 2-5: Modelo de línea de parámetros concentrados [21].
A partir de la Figura 2 5 se pueden extraer dos ecuaciones de las dos mallas a cada lado
de la falla de forma análoga a lo realizado en el numeral 2.7, pero con la diferencia que en
este caso los valores de corriente y tensión de uno de los extremos están afectados por el
término 𝑒𝑗𝛿, el cual representa el ángulo de sincronización
𝑉𝐹𝑖 = 𝑉𝑆𝑖𝑒𝑗𝛿 − 𝑥𝑍𝐿𝑖𝐼𝑆𝑖𝑒𝑗𝛿 (39)
𝑉𝐹𝑖 = 𝑉𝑅𝑖 − (1 − 𝑥)𝑍𝐿𝑖𝐼𝑅𝑖 (40)
Y al igualar las ecuaciones 39 y 40 se obtiene:
𝑒𝑗𝛿 =𝑉𝑅𝑖−𝑍𝐿𝑖𝐼𝑅𝑖+𝑥𝑍𝐿𝑖𝐼𝑅𝑖
𝑉𝑆𝑖−𝑥𝑍𝐿𝑖𝐼𝑆𝑖 (41)
Al sacar la magnitud de la ecuación 41 y reorganizar sus términos se tiene una ecuación
cuadrática de la forma:
𝐴𝑥2 + 𝐵𝑥 + 𝐶 = 0 (42)
Donde:
𝐴 = |𝑍𝐿𝑖𝐼𝑆𝑖|2 − |𝑍𝐿𝑖𝐼𝑅𝑖|2 (43)

24 Sistema para la localización automática de fallas en líneas de transmisión
𝐵 = −2𝑅𝑒[𝑈𝑆𝑖(𝑍𝐿𝑖𝐼𝑆𝑖)∗ + (𝑈𝑅𝑖 − 𝑍𝐿𝑖𝐼𝑅𝑖)(𝑍𝐿𝑖𝐼𝑅𝑖)∗] (44)
𝐶 = |𝑈𝑆𝑖|2 − |𝑈𝑅𝑖 − 𝑍𝐿𝑖𝐼𝑅𝑖|2 (45)
Se puede observar que con el método propuesto en la referencia [21], no es necesario la
sincronización exacta de los registros, pero al igual que otros métodos como el que se
explicará en el siguiente numeral dependen de valores de fallas en estado estable y
resistencia de falla no varíen en el tiempo, porque de lo contrario se hará necesario la
sincronización [19].
De acuerdo con la referencia [20], para implementar este método de localización los
valores de secuencia negativas se recomiendan para realizar el cálculo de la localización
de fallas desbalanceadas, mientras que los valores de secuencia positiva son utilizados
para el cálculo de la localización de falla trifásicas.
2.9 Método de solo corrientes desincronizadas
De acuerdo con la búsqueda bibliográfica, el método más referenciado que se encontró en
la literatura es el definido en la referencia [10], este método basa su desarrollo matemático
en la figura 2-6, específicamente en la red de secuencia negativa, esto con el fin de eliminar
todos los errores que presentan las secuencia cero y positiva.
A partir de la red de secuencia negativa de la figura 2-6, los autores de la referencia [10]
obtienen la siguiente expresión:
𝐼𝑅2 =𝐼𝑆2𝑍𝑆2+𝑥(𝐼𝑆2𝑍𝐿2)
𝑍𝑅2+𝑍𝐿2−𝑥𝑍𝐿2) (46)
Y a esta ecuación le sacan la magnitud con el fin de evitarse la sincronización de los
registros:
|𝐼𝑅2| =|𝐼𝑆2𝑍𝑆2+𝑥(𝐼𝑆2𝑍𝐿2)|
|𝑍𝑅2+𝑍𝐿2−𝑥𝑍𝐿2)| (47)

Métodos de localización de fallas 25
Figura 2-6: Conexión de las redes de secuencia para falla monofásica [10].
Finalmente, la ecuación queda de la forma 𝑎𝑥2 + 𝑏𝑥 + 𝑐 = 0, la cual puede ser resuelta
por medio de la fórmula de solución de una ecuación cuadrática:
𝑥 = −𝑏±√𝑏2−4𝑎𝑐
2𝑎 (48)
Al resolver esta fórmula, se toma el resultado que está entre 0 y 1.
Lo resultados obtenidos por medio de este método tiene errores muy bajos y tampoco se
requiere determinar el tipo de falla para poder realizar el cálculo de la localización, pero
debido a la utilización de la secuencia negativa el método no es útil para fallas trifásicas,
por lo cual para las fallas trifásicas, es posible realizar el mismo método pero con la red de

26 Sistema para la localización automática de fallas en líneas de transmisión
secuencia positiva. Otra de las desventajas que presenta este método, es que para poder
realizar el cálculo de la localización de la falla, los fasores de corriente y tensión se deben
tomar en el estado estable de la falla y en el caso de que la resistencia de la falla sea
variable en el tiempo, se hace necesario sincronizar los registros debido a que de lo
contrario los valores de tensión y corriente medidos en ambos extremos tendrán
magnitudes y ángulos diferentes y debido a que la formulación matemática está basada
en la tensión en el punto de la falla en un instante de tiempo específico, es necesario que
los datos sean sincronizados [19].
Este método es muy similar al presentado en el numeral 2.8, pero con la diferencia que
utiliza los valores de impedancia de la fuente en ambos extremos de la línea, por lo cual
en el caso de que se cuente con estos valores solo serían necesarios los valores de
corriente en ambos extremos del circuito tal como se plantea en [20]. Dado lo anterior, en
este trabajo este método fue utilizado considerando que de antemano se conocen las
impedancias de los equivalentes de cada extremo de la línea, tamo como lo indican en la
referencia [20].

3. Análisis y comparación de métodos de localización de fallas
Luego de revisar el fundamento matemático de diversos métodos de localización de fallas
en líneas de transmisión, estos deben ser analizados, por tal motivo en este capítulo se
realizará el análisis detallado de cada uno de los métodos, el cual incluirá la identificación
de los parámetros de entrada de cada método y los resultados de aplicar los diferentes
métodos de localización a fallas simuladas por medio del programa ATPDraw.
En cuanto a los archivos de pruebas utilizados en este trabajo, se simularon diferentes
tipos de fallas, monofásicas, bifásicas aisladas, bifásica a tierra y trifásicas, con diferentes
valores de resistencia de falla (0.001, 5, 10, 15, 20, 25, 30, 35, 40, 45 y 50 ohmios) lo cual
equivale a 44 fallas, una vez definidos las características de las fallas, cada una de estas
se simuló a lo largo de una línea de transmisión, comenzando al 0% desde el primer
extremo hasta el 100% de la línea, en pasos del 10%, lo cual equivale a simular 44 tipos
de fallas en 11 ubicaciones diferentes a lo largo de la línea, para un total de 484 fallas
diferentes.
El sistema implementado en ATPDraw se muestra en la Figura 3-1, y por medio de este
se realizaron las simulaciones en la línea 3 y a partir de estas simulaciones se extrajeron
968 archivos en el formato *PL4 (484 archivos con los valores de tensiones y corrientes de
la subestación B y 484 con los valores de tensiones y corrientes de la subestación C), los
cuales se convirtieron posteriormente al formato COMTRADE por medio del programa
Converter.exe [26].
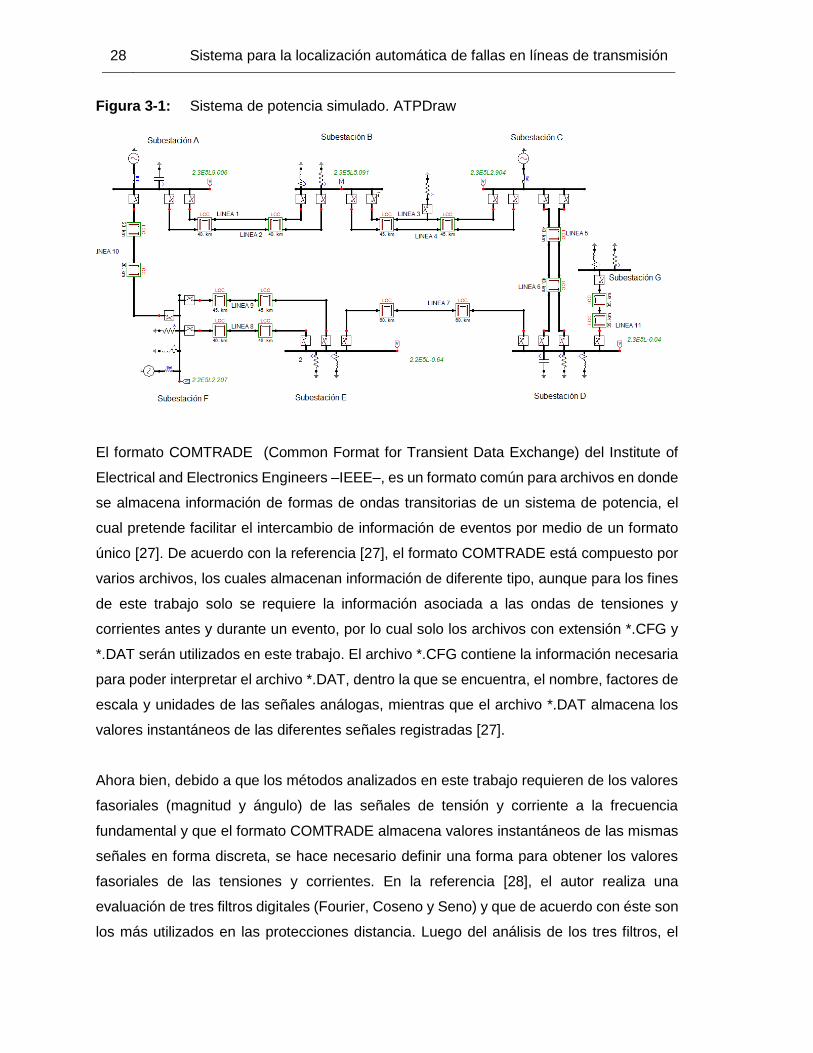
28 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-1: Sistema de potencia simulado. ATPDraw
El formato COMTRADE (Common Format for Transient Data Exchange) del Institute of
Electrical and Electronics Engineers –IEEE–, es un formato común para archivos en donde
se almacena información de formas de ondas transitorias de un sistema de potencia, el
cual pretende facilitar el intercambio de información de eventos por medio de un formato
único [27]. De acuerdo con la referencia [27], el formato COMTRADE está compuesto por
varios archivos, los cuales almacenan información de diferente tipo, aunque para los fines
de este trabajo solo se requiere la información asociada a las ondas de tensiones y
corrientes antes y durante un evento, por lo cual solo los archivos con extensión *.CFG y
*.DAT serán utilizados en este trabajo. El archivo *.CFG contiene la información necesaria
para poder interpretar el archivo *.DAT, dentro la que se encuentra, el nombre, factores de
escala y unidades de las señales análogas, mientras que el archivo *.DAT almacena los
valores instantáneos de las diferentes señales registradas [27].
Ahora bien, debido a que los métodos analizados en este trabajo requieren de los valores
fasoriales (magnitud y ángulo) de las señales de tensión y corriente a la frecuencia
fundamental y que el formato COMTRADE almacena valores instantáneos de las mismas
señales en forma discreta, se hace necesario definir una forma para obtener los valores
fasoriales de las tensiones y corrientes. En la referencia [28], el autor realiza una
evaluación de tres filtros digitales (Fourier, Coseno y Seno) y que de acuerdo con éste son
los más utilizados en las protecciones distancia. Luego del análisis de los tres filtros, el

Análisis y comparación de métodos de localización de fallas 29
autor de la referencia [28] concluye que el filtro más apropiado para realizar el cálculo de
fasores a la frecuencia fundamental (60 Hz) es el Fourier dado que es más preciso que los
otros dos filtros evaluados. De acuerdo con la misma referencia, las ecuaciones para
calcular el valor fasorial a la frecuencia fundamental de una señal son las siguientes:
𝑋𝑟𝑒𝑎𝑙 =2
𝑁𝐶∑ 𝑥(𝑛) cos
2𝜋𝑛
𝑁𝐶
𝑁𝐶−1𝑛=0 𝑋𝑖𝑚𝑎𝑔 = −
2
𝑁𝐶∑ 𝑥(𝑛) sen
2𝜋𝑛
𝑁𝐶
𝑁𝐶−1𝑛=0 (49)
Donde:
𝑋𝑟𝑒𝑎𝑙 es el valor pico de la componente real del fasor a la frecuencia fundamental de la
señal 𝑥(𝑛)
𝑋𝑖𝑚𝑎𝑔 es el valor pico de la componente imaginaria del fasor a la frecuencia fundamental
de la señal 𝑥(𝑛)
𝑁𝐶 es el número de muestras por ciclo de la señal 𝑥(𝑛)
𝑛 es el índice de la muestra
Por lo tanto, para obtener el fasor en magnitud y ángulo, se deben aplicar las siguientes
ecuaciones:
𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 =√𝑋𝑟𝑒𝑎𝑙
2+𝑋𝑖𝑚𝑎𝑔2
√2 𝐴𝑛𝑔𝑢𝑙𝑜 = tan−1 (
𝑋𝑖𝑚𝑎𝑔
𝑋𝑟𝑒𝑎𝑙) (50)
Las ecuaciones 49 y 50 permiten obtener de manera rápida, precisa y sencilla los
principales parámetros de entrada de los diferentes métodos de localización de fallas que
son las señales fasoriales de tensión y corriente a la frecuencia fundamental a partir de los
registros COMTRADE almacenados por los relés y registradores de fallas.
Por otro lado, dado que en este capítulo se realizará el análisis y comparación de cada uno
de los métodos, es importante definir una manera de medir el error de cada método y que
los resultados puedan ser comparables entre sí. Dado lo anterior, se tomó en cuenta la
recomendación de la referencia [19], la cual indica que al analizar varios métodos es mejor
un cálculo de error el cual utilice una referencia común (como lo es la longitud de la línea),
debido a que si el error absoluto de un método es de 1 km, el error relativo será igual si la

30 Sistema para la localización automática de fallas en líneas de transmisión
falla es al inicio o al final de la línea, lo cual no sucede, si como valor de referencia para el
cálculo del error relativo utilizamos la localización real de la falla. Tomando en cuenta lo
anterior, la formulación a utilizar para el cálculo del error de los diferentes métodos se
muestra a continuación:
𝑃𝑜𝑟𝑐𝑒𝑛𝑡𝑎𝑗𝑒 𝑑𝑒 𝑒𝑟𝑟𝑜𝑟 = |𝑋𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜− 𝑋𝑟𝑒𝑎𝑙|
𝐿𝑙𝑖𝑛𝑒𝑎∗ 100% (51)
Donde:
𝑋𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜 = Localización de la falla calculada mediante el método
𝑋𝑟𝑒𝑎𝑙 = Localización de la falla real
𝐿𝑙𝑖𝑛𝑒𝑎 = Longitud de la línea
Teniendo claro lo anterior, a continuación se analizaran los métodos descritos en el
capítulo 2.
3.1 Análisis del método de reactancia simple
3.1.1 Datos de entrada
A partir de las formulas definidas en la Tabla 2-1 y de lo definido en la referencia [20], se
tiene que para implementar el método de reactancia simple se requiere de la siguiente
información:
- Tipo de falla
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
De los cinco datos de entrada necesarios para aplicar el método de reactancia simple, el
dato que puede llegar a presentar mayor variabilidad en el tiempo es la impedancia de
secuencia de cero, dado que este depende de las características del terreno a lo largo del
que se tienda la línea de transmisión.
Análisis y comparación de métodos de localización de fallas 31
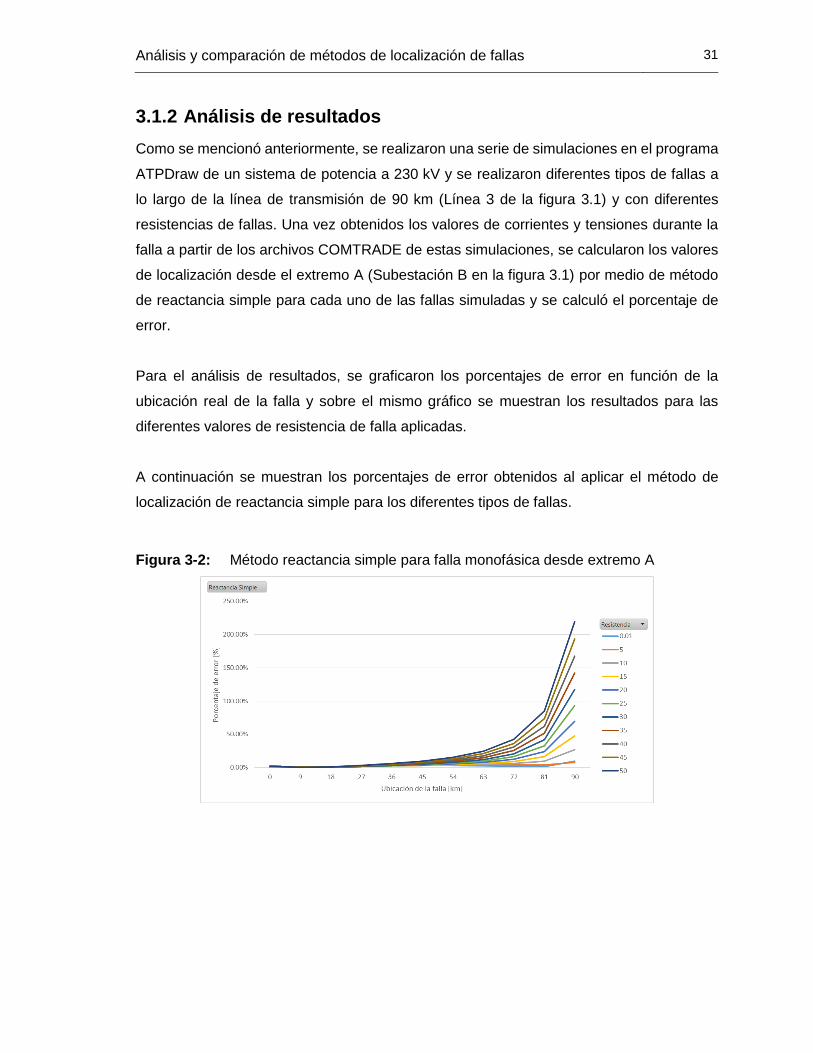
3.1.2 Análisis de resultados
Como se mencionó anteriormente, se realizaron una serie de simulaciones en el programa
ATPDraw de un sistema de potencia a 230 kV y se realizaron diferentes tipos de fallas a
lo largo de la línea de transmisión de 90 km (Línea 3 de la figura 3.1) y con diferentes
resistencias de fallas. Una vez obtenidos los valores de corrientes y tensiones durante la
falla a partir de los archivos COMTRADE de estas simulaciones, se calcularon los valores
de localización desde el extremo A (Subestación B en la figura 3.1) por medio de método
de reactancia simple para cada uno de las fallas simuladas y se calculó el porcentaje de
error.
Para el análisis de resultados, se graficaron los porcentajes de error en función de la
ubicación real de la falla y sobre el mismo gráfico se muestran los resultados para las
diferentes valores de resistencia de falla aplicadas.
A continuación se muestran los porcentajes de error obtenidos al aplicar el método de
localización de reactancia simple para los diferentes tipos de fallas.
Figura 3-2: Método reactancia simple para falla monofásica desde extremo A

32 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-3: Método reactancia simple para falla bifásica aislada desde extremo A
Figura 3-4: Método reactancia simple para falla bifásica a tierra desde extremo A
Figura 3-5: Método reactancia simple para falla trifásica desde extremo A

Análisis y comparación de métodos de localización de fallas 33
En general, por medio de los resultados se observa que este método presenta un buen
desempeño (porcentaje de error menor al 10%) cuando las fallas tienen una resistencia de
falla pequeña (menor a los 5 ohmios), pero en la medida que la impedancia de falla
aumenta y la falla se aleja del punto de medida el error aumenta considerablemente, por
lo cual inmediatamente se puede establecer que este método no es apto para fallas con
altas resistencias de falla, ahora bien, como se detalló en el capítulo 2 de este documento,
esto se debe al efecto reactancia, el cual depende de la resistencia de la falla. Teniendo
en cuenta lo anterior, considero que este método solo debe ser aplicado sobre fallas con
impedancias de falla pequeñas, menor a los 5 ohmios, pero aquí se presenta un nuevo
problema y es el identificar cuantos ohmios tiene una falla ante de aplicar el método. Una
forma práctica puede ser observando el ángulo de la falla, es decir, la diferencia angular
entre la tensión y la corriente de la fase en falla al momento de la perturbación, dado que
esta es una medida indirecta de la resistencia de la falla como se puede observar en la
Figura 2-2, puesto que en la medida que la resistencia de falla sea más grande la diferencia
angular entre la tensión y la corriente de falla va ser menor, pero un nuevo inconveniente
se presenta, y es que cuando la falla es muy cercana al punto de medida, ante una falla
de baja resistencia, como 1 o 2 ohmios, el ángulo de falla también es pequeño, por tal
motivo, para complementar la toma de la decisión acerca de si la falla es de alta o baja
impedancia, debido a que si la magnitud de la tensión cae a valores inferiores a la mitad
de la tensión nominal es muy probable que la falla se encuentre al punto de medida. Los
criterios anteriores están basados en la experiencia del autor en análisis de eventos en
líneas de transmisión.
En cuanto a las fallas bifásicas a tierra, se observa que para todos los valores de
resistencia y localización solo se alcanzó un porcentaje de error máximo de alrededor del
6%, pero al analizar se encuentra que el modelo utilizado para este tipo de falla (Figura
3-6) es una falla franca entre las dos fases falladas y la resistencia que se modifica es la
asociada a tierra, por lo tanto, el resultado obtenido en la Figura 3-4, es el mismo que se
obtiene en la Figura 3-3 para una resistencia de falla igual a 0.01. Por lo tanto, si para la
falla bifásica a tierra tenemos resistencia de falla entre las fases falladas, llegaremos a un
resultado similar al de la Figura 3-3 en los porcentajes de error de método de reactancia
simple.

34 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-6: Modelo de falla bifásica a tierra
Una conclusión general de este método, presenta bajos porcentajes de error para fallas de
baja impedancia (menores a 5 ohmios) y localizadas carca al punto de medida.
A continuación se resumirán las ventajas y desventajas del método de reactancia simple,
las cuales se pudieron extraer de la bibliografía referenciada en este documento y de los
resultados de las pruebas realizadas a este método.
Tabla 3-1: Ventajas y desventajas del método de reactancia simple
VENTAJAS DESVENTAJAS
- Requiere valores de corriente y tensión en un solo extremo de la línea de transmisión.
- No requiere sincronización de registros.
- Requiere valores de tensiones y corrientes de la fase o fases falladas en el momento de la falla.
- No requiere valores de pre-falla. - Alta precisión para resistencias de
falla pequeñas o con corrientes del extremo remoto en cero o en fase con la corriente local.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F).
- Errores considerables para altos valores de resistencia de falla, es decir, se ve afectado por la resistencia de la falla (efecto reactancia).
- Se ve afectado por la carga y homogeneidad del sistema.
- El efecto infeed influye en el resultado - Se requiere conocer el tipo de falla antes
de realizar el cálculo. - Entre más lejana sea la falla mayor es el
porcentaje de error.
3.2 Análisis del método Takagi
3.2.1 Datos de entrada
A partir de la fórmula 14 y de lo definido en la referencia [20], se tiene que para implementar
el método Takagi se requiere de la siguiente información:

Análisis y comparación de métodos de localización de fallas 35
- Tipo de falla
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Corrientes del extremo local durante la pre-falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
Como se puede observar, además de los 5 datos requeridos en el método de reactancia
simple, el método Takagi requiere del valor de corriente de pre-falla con el cual busca
eliminar el la componente de carga y así poder eliminar esta fuente de error por medio del
principio de superposición [20].
3.2.2 Análisis de resultados
Al igual que con el método de reactancia simple, el método Takagi fue probado con 484
fallas tal como se explicó en el numeral 3.1.2, obteniendo los siguientes resultados:
Figura 3-7: Método Takagi para falla monofásica desde el extremo A

36 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-8: Método Takagi para falla bifásica aislada desde el extremo A
Figura 3-9: Método Takagi para falla bifásica a tierra desde el extremo A
Figura 3-10: Método Takagi para falla trifásica desde el extremo A

Análisis y comparación de métodos de localización de fallas 37
Luego de analizar los resultados al aplicar el método Takagi a un gran número de fallas,
se concluye que por medio de este método se obtienen menores porcentajes de error que
con el método de reactancia simple, aunque se requiere un dato adicional, la corriente de
pre-falla. Por otro lado, también se observa un comportamiento similar en el porcentaje de
error de este método, dado que en la medida que la falla se aleja del punto de medida y la
resistencia de falla aumenta el porcentaje de error aumento.
Particularmente, en los resultados para una falla monofásica se observa que para fallas
con resistencia de fallas de hasta 10 ohmios se obtienen porcentajes de error menores al
10%, mientras que para fallas trifásicas se obtienen porcentajes de error de esta magnitud
hasta resistencias de aproximadamente 5 ohmios. En cuanto a las fallas bifásicas, se
observa la misma tendencia que para el método de reactancia simple en cuanto al aumento
del porcentaje de error en la medida que aumenta la resistencia y la distancia a la falla,
pero porcentaje de error en si llegar a ser de casi un tercio del observado en el método de
reactancia simple.
A continuación se resumirán las ventajas y desventajas del método de Takagi, las cuales
se pudieron extraer de la bibliografía referenciada en este documento y de los resultados
de las pruebas realizadas a este método.
Tabla 3-2: Ventajas y desventajas del método Takagi
VENTAJAS DESVENTAJAS
- Solo requiere la información de un extremo de la línea.
- Solo requiere valores de tensiones y corrientes de la fase o fases en el momento de la falla.
- Alta precisión para resistencias de falla igual a cero o con corrientes del extremo remoto en cero o en fase con la corriente local.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F).
- Corrige errores ocasionados por el flujo de carga de pre-falla, la resistencia de falla y la disposición asimétrica de la línea de transmisión.
- Errores considerables para altos valores de resistencia de fallas y fallas alejadas del punto de medida.
- Se ve afectado por la resistencia de la falla (efecto reactancia).
- Se ve afectado por la homogeneidad del sistema.
- El efecto infeed influye en el resultado. - Requiere valores de corrientes de pre-
falla. - Requiere de corrientes de pre-falla en el
extremo local.
38 Sistema para la localización automática de fallas en líneas de transmisión
En conclusión, el método Takagi presenta mejor desempeño que le método de reactancia
simple con la única diferencia que requiere la corriente de pre-falla, por lo tanto, si
contamos con esta información considero que el método Takagi debe ser utilizado en vez
del método de reactancia simple.
3.3 Análisis del método Takagi Modificado
3.3.1 Datos de entrada
A partir de las ecuaciones 15, 16 y 17 y de lo definido en la referencia [20], se tiene que
para implementar el método Takagi modificado se requiere de la siguiente información:
- Tipo de falla
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
- Impedancia de fuente de secuencia cero en el extremo local (Opcional)
- Impedancia de fuente de secuencia cero en el extremo remoto
Con el método Takagi modificado aparecen nuevos valores de entrada, las impedancias
de secuencia cero equivalentes en cada extremo de la línea (impedancia de la fuente
equivalente), y desaparece la necesidad de contar con valores de pre-falla.
3.3.2 Análisis de resultados
A diferencia de los métodos anteriores, el método Takagi modificado fue probado solo con
121 fallas, debido a que de acuerdo con la referencia [20] para la implementación de este
método se requiere de la corriente residual 3I0, para evitar la necesidad de utilizar la
corriente de pre-falla, por lo tanto solo se aplicó en falla monofásicas. Los resultados
obtenidos al aplicar este método a las 121 fallas monofásicas simuladas se muestra a
continuación:

Análisis y comparación de métodos de localización de fallas 39
Figura 3-11: Método Takagi modificado para falla monofásica desde el extremo A
De la Figura 3 11 se puede concluir que el porcentaje de error obtenido por este método
permanece en valores inferiores al 5% para cualquier valor de resistencia de falla y
ubicación de falla menor al 70% de la longitud de la falla, pero al igual que con los dos
métodos analizados hasta el momento, en la medida que la ubicación real de la falla
comienza a aumentar, el método también aumenta el porcentaje de error.
Al analizar las ecuaciones 15, 16 y 17, el cálculo de la localización por medio del método
Takagi modificado dependerá de si se tienen o no las impedancias Thevenin en cada
extremo de la línea con el fin de calcular el valor de β y así poder contrarrestar la no
homogeneidad del sistema [20]. Dado lo anterior, en este trabajo el valor de impedancia
de secuencia cero de la fuente del extremo remoto al extremo donde se tiene la medida,
se calculó con los valores de corrientes y tensiones obtenidos de hacer una falla
monofásica en el extremo remoto, mientras que la impedancia de secuencia cero de la
fuente del extremo local se calcula con las corrientes y tensiones de cada falla analizada.
Por otro lado, de acuerdo con las referencias [19] y [20], por medio de este método se
puede disminuir el porcentaje de error del cálculo de localización de la falla siempre y
cuando los parámetros del sistema sean correctos, pero este es el principal problema que
puede llegar a presentar este método, el cual a pesar de considerarse que solo necesita
las medidas de tensión y corriente de un solo extremo, también requiere el valor de
impedancia equivalente del extremo remoto, el cual no es constante y depende de las
condiciones topológicas y de generación aguas arriba de la barra remota. Otro de los

40 Sistema para la localización automática de fallas en líneas de transmisión
limitantes que presenta este método, es que como se mencionó anteriormente, necesita
de la corriente de secuencia cero para realzar el cálculo inicial de la localización, por lo
cual este método no se puede utilizar para falla monofásicas.
A continuación se resumirán las ventajas y desventajas del método de Takagi modificado,
las cuales se pudieron extraer de la bibliografía referenciada en este documento y de los
resultados de las pruebas realizadas a este método.
Tabla 3-3: Ventajas y desventajas del método Takagi modificado
VENTAJAS DESVENTAJAS
- Solo requiere la información de corrientes y tensiones en un extremo de la línea.
- Alta precisión para resistencias de falla igual a cero o con corrientes del extremo remoto en cero o en fase con la corriente local.
- Buen desempeño para fallas de alta impedancia hasta ubicaciones relativamente alejadas del punto de medición.
- Requiere de valores impedancia equivalente del extremo remoto, por lo cual este valor debe ser conocido con anticipación.
- Calculo de localización solo para fallas monofásicas.
- Altos porcentajes de error para fallas alejadas del punto de medidas con altas resistencias de fallas.
3.4 Análisis del método Eriksson
3.4.1 Datos de entrada
A partir de las ecuaciones del numeral 2.4 y de lo definido en la referencia [20], se tiene
que para implementar el método Eriksson se requiere de la siguiente información:
- Tipo de falla
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Corrientes del extremo local durante la pre-falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
- Impedancia de fuente de secuencia positiva en el extremo local (Opcional)
- Impedancia de fuente de secuencia positiva en el extremo remoto
El método Eriksson al igual que el Takagi modificado, requiere de valores de impedancia
Thevenin del extremo remoto, lo cual como se ha mencionado es una fuente de error

Análisis y comparación de métodos de localización de fallas 41
debido a que estos valores son cambiantes en el tiempo dadas las diferentes topologías
que pueden presentarse en un sistema de potencia, por lo tanto en la medida que estos
valores sean bastantes cercanos a los valores reales se podrá llegar a un valor de
localización bastante aproximado al valor real, pero en la medida que este valor se aleje
de la realidad, el error puede aumentar y lo particular de este tema es que es muy difícil
identificar si el valor utilizado de impedancia Thevenin del extremo remoto es cercano o
alejado del valor real.
3.4.2 Análisis de resultados
El método Eriksson, también se probó con 484 fallas tal como se explicó en el numeral
3.1.2, obteniendo los siguientes resultados:
Figura 3-12: Método Eriksson para falla monofásica desde el extremo A
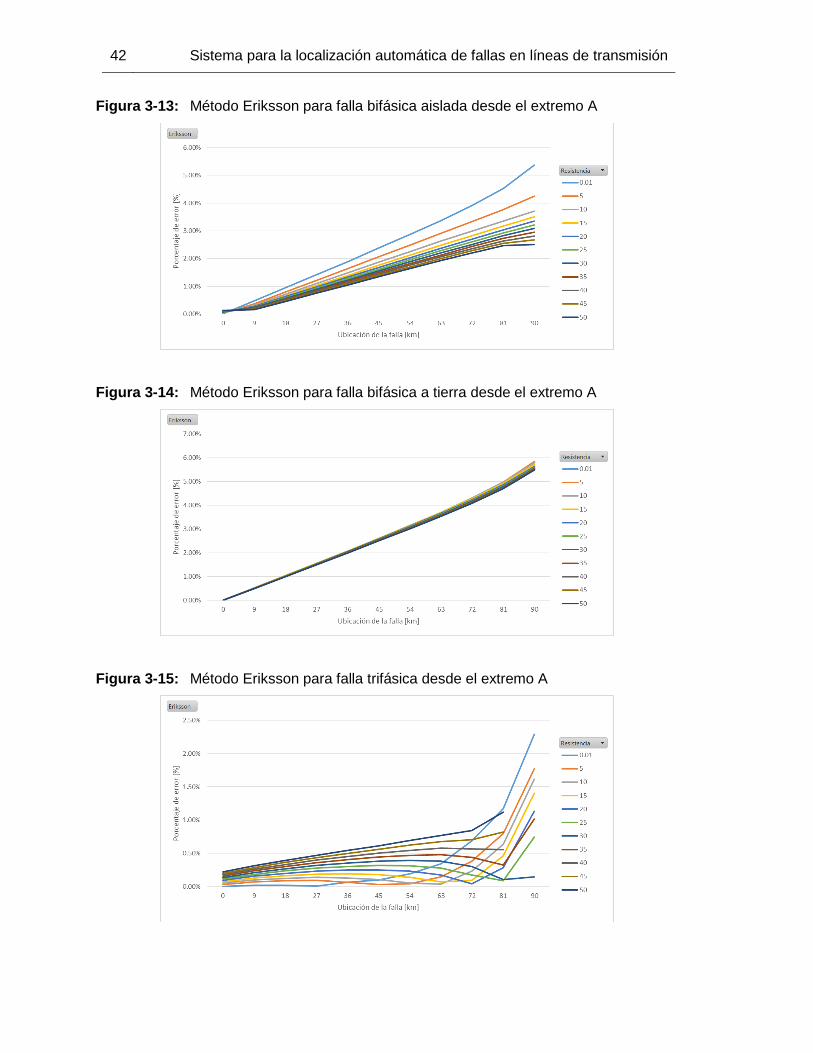
42 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-13: Método Eriksson para falla bifásica aislada desde el extremo A
Figura 3-14: Método Eriksson para falla bifásica a tierra desde el extremo A
Figura 3-15: Método Eriksson para falla trifásica desde el extremo A

Análisis y comparación de métodos de localización de fallas 43
De los resultados obtenidos al aplicar el método Eriksson para todas las fallas simuladas,
la principal característica observada es que los porcentajes de error para las fallas
multifásicas alcanzan valores máximos del 6% incluso para fallas de 50 ohmios en el
extremo remoto de la línea, lo cual es un resultado bastante bueno considerando que solo
se cuenta con la información de un solo extremo.
Ahora bien, para las fallas monofásicas, las cuales representan la mayoría en un sistema
de potencia, el método presenta un buen desempeño, similar al método Takagi modificado,
con la diferencia de que los porcentajes de error para fallas alejadas del punto de medida
y con resistencias de fallas altas son muy inferiores a los obtenidos con el segundo método.
Otra diferencia entre estos dos métodos, es que la impedancia de Thevenin requerida por
el método Eriksson es de secuencia positiva mientras que para el método Takagi
modificado se requiere la impedancia de secuencia cero y finalmente que el primero
requiere los valores de corriente de pre-falla, mientras que el segundo no las requiere.
A continuación se resumirán las ventajas y desventajas del método de Eriksson, las cuales
se pudieron extraer de la bibliografía referenciada en este documento y de los resultados
de las pruebas realizadas a este método.
Tabla 3-4: Ventajas y desventajas del método Eriksson
VENTAJAS DESVENTAJAS
- Solo requiere la información de corrientes y tensiones en un extremo de la línea.
- Buena precisión para fallas multifásicas.
- Buen desempeño para fallas de alta impedancia hasta ubicaciones relativamente alejadas del punto de medición.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F)
- Requiere de valores impedancia equivalente del extremo remoto, por lo cual este valor debe ser conocido con anticipación.
- Requiere valores de corrientes de pre-falla
- Altos porcentajes de error para fallas alejadas del punto de medidas con altas resistencias de fallas.

44 Sistema para la localización automática de fallas en líneas de transmisión
3.5 Análisis del método Novosel
Como se explicó anteriormente, el método Novosel fue diseñado para localizar falla en
líneas de transmisión radiales, pero a pesar de esto se probó este método con el fin probar
si era posible utilizar el método en líneas que fueran radiales, para esto se realizaron
cálculos de localización desde ambos extremos y se analizaron los resultados.
3.5.1 Datos de entrada
A partir de las ecuaciones del numeral 2.5 y de lo definido en la referencia [20], se tiene
que para implementar el método Novosel se requiere de la siguiente información:
- Tipo de falla
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Corrientes del extremo local durante la pre-falla
- Tensiones del extremo local durante la pre-falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
- Impedancia de fuente de secuencia positiva en el extremo local (Opcional)
Dentro de los parámetros de entrada, este método adiciona un dato que en ninguno de los
métodos anteriores no se había solicitado y es la tensión de pre-falla, pero con ventaja no
requiere de valores del extremo remoto.
3.5.2 Análisis de resultados
El método Eriksson, también se probó para los diferentes tipos de falla definidas
anteriormente, pero al analizar los resultados de la Figura 3 16 y la Figura 3 17, se observa
que si se calcula la localización con los registros del extremo A, el porcentaje de error está
por encima de 4000% mientras que cuando se calcula la localización con los registros del
extremo B, el porcentaje de error presenta una curva como las de los métodos de
reactancia simple y Takagi, por tal motivo se tomó la decisión de descartar este método
para ser utilizado dentro del sistema propuesto en este trabajo.

Análisis y comparación de métodos de localización de fallas 45
Figura 3-16: Método Novosel para falla monofásica desde el extremo A
Figura 3-17: Método Novosel para falla monofásica desde el extremo B
3.6 Análisis del método de factores de distribución de corrientes de falla
3.6.1 Datos de entrada
A partir de las ecuaciones del numeral 2.6 y de lo definido en la referencia [21], se tiene
que para implementar el método de factores de distribución de corrientes de falla se
requiere la misma información del método Takagi:
- Tipo de falla

46 Sistema para la localización automática de fallas en líneas de transmisión
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Corrientes del extremo local durante la pre-falla
- Parámetros de secuencia positiva de la línea de transmisión
- Parámetros de secuencia cero de la línea de transmisión
Lo que diferencia este método del método Takagi, es que el primero puede ser
implementado de tres maneras diferentes de acuerdo con la prioridad que se le quiera dar
a una componente de secuencia determinada (positiva o negativa) como se explicó en el
numeral 2.6
3.6.2 Análisis de resultados
Como se mencionó en el numeral 2.6, el método de localización por medio de factores de
distribución de corrientes de falla puede ser aplicado dándole prioridad a la secuencia
positiva, a la secuencia negativa o ambas por igual, por lo tanto el análisis realizado a este
método fue realizado probando las tres alternativas planteadas y de esta manera poder
evaluar cuál de las tres presenta un mejor desempeño, los porcentajes de error obtenidos
para cada falla simulada se muestran en las figuras del anexo B.
Dado que este método requiere los mismos datos de entrada que el método Takagi, se
realizara una comparación entre los dos métodos en particular y así definir cuál de los dos
debe ser aplicado al sistema propuesto en este trabajo.
En lo relacionado con la falla monofásica se observa una ligera diferencia entre los dos
métodos, pero se puede notar que el método de factores de distribución de corrientes de
falla con prioridad a la secuencia positiva tiene mejor despeño que las otras dos opciones
de prioridad y que el método Takagi, mientras que para las fallas bifásicas y bifásicas a
tierra el mejor desempeño se obtiene en el método de factores de distribución de corrientes
de falla con prioridad a la secuencia negativa, finalmente, para la falla trifásica el método
Takagi tiene el mejor desempeño, aunque es muy parecido al método de factores de
distribución de corrientes de falla con prioridad a la secuencia positiva. En conclusión
ambos métodos presentan un buen desempeño aunque el método de factores de
distribución de corrientes de falla presenta menores porcentajes de error en comparación

Análisis y comparación de métodos de localización de fallas 47
al método Takagi, por lo se descartará el método Takagi y se utilizará el método de factores
de distribución de corrientes de falla con prioridad de secuencia positiva para falla
monofásicas y trifásicas (no tiene componente de secuencia negativa), mientras que para
fallas bifásicas aisladas y a tierra se utilizara el método de factores de distribución de
corrientes de falla con prioridad de secuencia negativa.
Como se pudo notar, los métodos descritos anteriormente se basan en las medidas de
tensiones y corrientes desde un extremo y a partir del análisis de estos se encontró que es
muy difícil eliminar el error del cálculo de localización debido a la resistencia de falla y el
método o métodos que lo logran necesitan la impedancia del equivalente Thevenin del
extremo remoto en el momento del evento, valor el cual es muy difícil de obtener si no se
cuenta con el registro de falla del extremo remoto. Por lo anterior, a continuación se
describirán métodos basados en los valores de corrientes y tensiones de ambos extremos
de la línea de transmisión.
3.7 Análisis del método doble fuente sincronizado
3.7.1 Datos de entrada
A partir de las ecuaciones del numeral 2.7 y parte de lo definido en la referencia [20], se
tiene que para implementar el método de doble fuente sincronizado como se planteó en el
numeral 2.7 se requiere de la siguiente información:
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Tensiones y corrientes del extremo remoto durante la falla
- Parámetros de secuencia positiva de la línea de transmisión
- Tensiones y corrientes del extremo local durante la pre-falla
- Tensiones y corrientes del extremo remoto durante la pre-falla.
3.7.2 Análisis de resultados
A continuación se muestran los resultados de aplicar el método de Doble Fuente
Sincronizado (DF Sincronizado) a las 484 fallas simuladas por medio de ATRDraw:

48 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-18: Método DF Sincronizado para falla monofásica desde el extremo A
Figura 3-19: Método DF Sincronizado para falla bifásica aislada desde el extremo A
Figura 3-20: Método DF Sincronizado para falla bifásica a tierra desde el extremo A

Análisis y comparación de métodos de localización de fallas 49
Figura 3-21: Método DF Sincronizado para falla trifásica desde el extremo A
Al analizar el método de doble fuente sincronizado lo primero que se alcanza a observar
es que ante todas las fallas realizadas, el mayor porcentaje de error obtenido es del 3.5%,
el cual se presentó en falla monofásicas, y que al ser comparados con los resultados de
los métodos de localización de un extremo muestran un mejor desempeño que los últimos
con la desventaja de que se necesita la información de ambos extremos.
Ahora bien, en cuanto al efecto que tiene la resistencia de falla en el porcentaje de error
del método, se nota que el efecto no es tan drástico como en los métodos de un extremo,
incluso, para la fallas bifásica y bifásica a tierra, la simulaciones con resistencia de falla de
50 ohmios no son las de mayor porcentaje de error, tanto así que en la falla bifásica a tierra
la falla franca es la de mayor porcentaje de error como se puede ver en la Figura 3-20.
Otra de las características del método es que no requiere conocer el tipo de falla, debido
a que al utilizar la componente de secuencia negativa para todos los tipos de fallas menos
para la falla trifásica, solo se requiere conocer si hay o no componente de secuencia
negativa y en consecuencia evaluar el método según corresponda.
A pesar de los pequeños porcentajes de error que presentan los resultados de este
método, es importante también resaltar que el tema de la sincronización de los registros
juega un papel importantísimo, y es que contar con registros sincronizados o con una
desincronización pequeña es más difícil de lo que parece en el escenario real, dado que
como se comentó anteriormente en este documento, en las subestaciones se cuenta con
GPS, pero no siempre estos funcionan como se espera y más aún, los cristales internos
50 Sistema para la localización automática de fallas en líneas de transmisión
(utilizados para el reloj interno del dispositivo) de los registradores de falla o relés de
protección que almacenan registros oscilográficos no siempre mantienen la hora
actualizada cuando la señal del GPS se pierde por mucho tiempo. En conclusión, el método
de doble fuente sincronizado presenta muy buen desempeño con la desventaja de
depender en gran medida del grado de sincronización de los registros de falla.
A continuación se resumirán las ventajas y desventajas del método de doble fuente
sincronizado, obtenidas de las referencias [19], [20] y [21] y de los resultados de las
pruebas realizadas a este método.
Tabla 3-5: Ventajas y desventajas del método de doble fuente sincronizado
VENTAJAS DESVENTAJAS
- Los porcentajes de error obtenidos con el método son muy pequeños (inferiores al 3%).
- La resistencia de falla no juega un papel importante dentro del porcentaje de error del método.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F).
- No requiere saber el tipo de falla.
- Requiere valores de tensiones y corriente de ambos extremos de la línea.
- Requiere sincronización de registros o con desincronización pequeña (menor a 16.666 ms).
- Requiere valores de pre-falla, con el fin de ajustar la sincronización.
3.8 Análisis del método doble fuente desincronizado
3.8.1 Datos de entrada
A partir de las ecuaciones del numeral 2.8 y parte de lo definido en la referencia [20], se
tiene que para implementar el método de doble fuente desincronizado se requiere de la
siguiente información:
- Longitud de la línea de transmisión
- Tensiones y corrientes del extremo local durante la falla
- Tensiones y corrientes del extremo remoto durante la falla
- Parámetros de secuencia positiva de la línea de transmisión
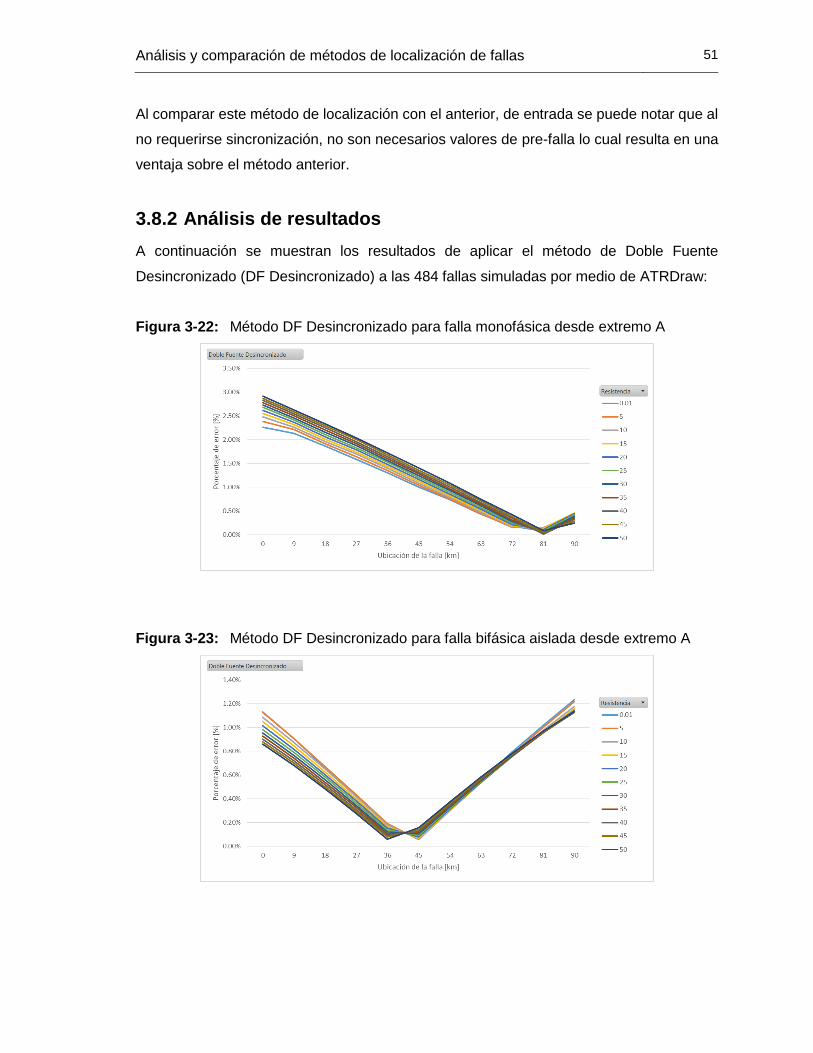
Análisis y comparación de métodos de localización de fallas 51
Al comparar este método de localización con el anterior, de entrada se puede notar que al
no requerirse sincronización, no son necesarios valores de pre-falla lo cual resulta en una
ventaja sobre el método anterior.
3.8.2 Análisis de resultados
A continuación se muestran los resultados de aplicar el método de Doble Fuente
Desincronizado (DF Desincronizado) a las 484 fallas simuladas por medio de ATRDraw:
Figura 3-22: Método DF Desincronizado para falla monofásica desde extremo A
Figura 3-23: Método DF Desincronizado para falla bifásica aislada desde extremo A

52 Sistema para la localización automática de fallas en líneas de transmisión
Figura 3-24: Método DF Desincronizado para falla bifásica a tierra desde extremo A
Figura 3-25: Método DF Desincronizado para falla trifásica desde extremo A
El método de doble fuente desincronizado al igual que el sincronizado, presenta un buen
desempeño en términos del bajo porcentaje de error que tiene para todas las fallas
analizadas, aunque para las fallas trifásicas el error máximo alcanza valores del 5.5%,
como se puede observar en la Figura 3-25. Un inconveniente que puede llegar a presentar
este método en la red de transmisión, es que los sistemas de protección están ajustados
para despejar las fallas lo más rápido posible y por ende las fallas permanecen en el
sistema por tiempos no mayores a los 60 ms o 70 ms incluso tiempos menores, por lo cual
si los registros de ambos extremos vienen desincronizados por un tiempo mayor al tiempo
de despeje de la falla el método no entregará un resultado correcto, ante lo cual se deberá
realizar una sincronización manual de los registros y volver a aplicar el método de
localización.

Análisis y comparación de métodos de localización de fallas 53
A continuación se resumirán las ventajas y desventajas del método de doble fuente
desincronizado, obtenidas de las referencias [20] y [21] y de los resultados de las pruebas
realizadas a este método.
Tabla 3-6: Ventajas y desventajas del método de doble fuente desincronizado
VENTAJAS DESVENTAJAS
- Los porcentajes de error obtenidos con el método son muy pequeños (inferiores al 5.5%).
- La resistencia de falla no juega un papel importante dentro del porcentaje de error del método si esta no es variable.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F).
- No requiere sincronización de registros. - No requiere saber el tipo de falla.
- Requiere valores de tensiones y corriente de ambos extremos de la línea.
- Ante fallas con resistencia de falla variante en el tiempo, si se requiere sincronizar los registros de ambos extremos.
- Ante registros con tiempos de despejes pequeños la desincronización no puede ser mayor al menor de los tiempos de despaje entre los dos extremos.
3.9 Análisis del método de solo corrientes desincronizadas
3.9.1 Datos de entrada
A partir de las ecuaciones del numeral 2.9 y de lo definido en la referencia [20], se tiene
que para implementar el método de solo corrientes desincronizadas se requiere de la
siguiente información:
- Longitud de la línea de transmisión
- Corrientes del extremo local durante la falla
- Corrientes del extremo remoto durante la falla
- Parámetros de secuencia positiva de la línea de transmisión
- Impedancia de fuente de secuencia positiva en el extremo local
- Impedancia de fuente de secuencia positiva en el extremo remoto
- Impedancia de fuente de secuencia negativa en el extremo local
- Impedancia de fuente de secuencia negativa en el extremo remoto
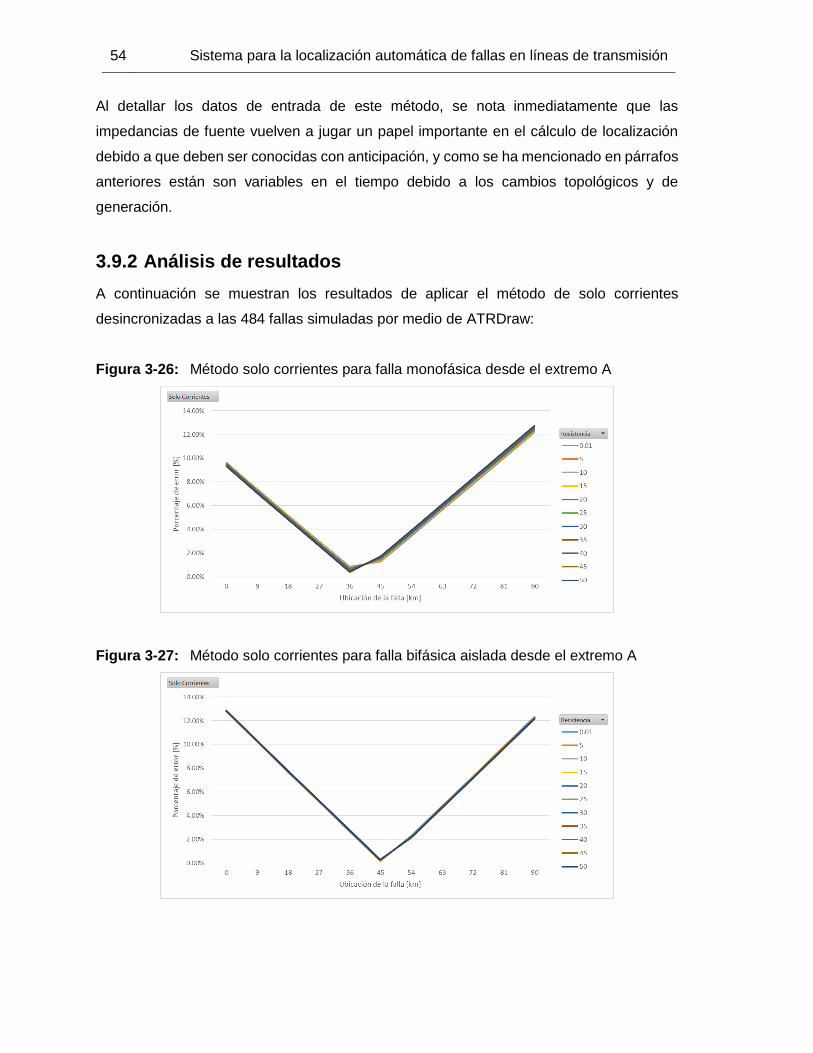
54 Sistema para la localización automática de fallas en líneas de transmisión
Al detallar los datos de entrada de este método, se nota inmediatamente que las
impedancias de fuente vuelven a jugar un papel importante en el cálculo de localización
debido a que deben ser conocidas con anticipación, y como se ha mencionado en párrafos
anteriores están son variables en el tiempo debido a los cambios topológicos y de
generación.
3.9.2 Análisis de resultados
A continuación se muestran los resultados de aplicar el método de solo corrientes
desincronizadas a las 484 fallas simuladas por medio de ATRDraw:
Figura 3-26: Método solo corrientes para falla monofásica desde el extremo A
Figura 3-27: Método solo corrientes para falla bifásica aislada desde el extremo A

Análisis y comparación de métodos de localización de fallas 55
Figura 3-28: Método solo corrientes para falla bifásica a tierra desde el extremo A
Figura 3-29: Método solo corrientes para falla trifásica desde el extremo A
Al analizar los resultados del método de solo corrientes desincronizadas ante los distintos
tipos de fallas simulados, se tiene que los porcentajes de error del método incluso para
fallas de baja resistencia de falla varían desde valores muy cercanos a cero hasta
aproximadamente el 15%, lo cual es ocasionado por la incertidumbre en el valor de las
impedancias de fuente.
La ventaja que presenta este método es que no requiere valores de tensiones y por ende
si contamos con un registro que solo contenga valores de corriente entonces este será el
método ideal, aunque de la experiencia del autor de este documento se conoce que es
muy extraño que se tengan registros oscilográficos que solo contengas valores de
corrientes, por lo tanto, la ventaja que tiene este método deja de ser importante.

56 Sistema para la localización automática de fallas en líneas de transmisión
A continuación se resumirán las ventajas y desventajas del método de solo corrientes
desincronizadas, obtenidas de la referencia [20] y de los resultados de las pruebas
realizadas a este método.
Tabla 3-7: Ventajas y desventajas del método de solo corrientes desincronizadas
VENTAJAS DESVENTAJAS
- Solo requiere valores de corriente de ambos extremos de la línea.
- Calculo de localización para todo tipo de fallas (1F, 2F, 2F-T y 3F).
- No requiere sincronización de registros. - No requiere saber el tipo de falla.
- Los porcentajes de error son bastantes variables.
- Se requiere conocer los valores de impedancia de las fuentes de ambos extremos de la línea.
- Ante fallas con resistencia de falla variante en el tiempo, si se requiere sincronizar los registros de ambos extremos.
- Ante registros con tiempos de despejes pequeños la desincronización no puede ser mayor al menor de los tiempos de despaje entre los dos extremos.
Luego de analizar la bibliografía de los diferentes métodos encontrados y los resultados
de aplicar cada uno de estos métodos a una muestra importante de métodos, se puede
concluir que los métodos de un extremo, pueden ser muy útiles cuando se trata de fallas
muy cercanas al punto de medida y presentan mejor desempeño en la medida que la
resistencia de falla se hace menor, pero considerando que la información que se utiliza es
de un solo extremo el resultado es bastante bueno. Por otro lado, los métodos de dos
extremos presentan un desempeño extraordinario siempre y cuando se superen los
problemas de la información de los dos extremos y de la sincronización de los registros, lo
cual representa la mayor dificultad de la utilización de este tipo de método.
Dentro de los objetivos que se plantearon al iniciar este trabajo, se buscaba identificar
métodos que permitieran determinar una localización fiable de forma conjunta para un
porcentaje superior al 90% de las fallas analizadas, pero luego de analizar los diferentes
métodos de localización se encontró que en los métodos de localización de dos extremos,
los porcentajes de error son bajos, exceptuando el método de solo corrientes, siempre y
cuando la información de entrada disponible para la utilización del método sea la correcta.
Igual sucede con los métodos de un extremo, en donde se pudo observar que en un par
de estos se requiere información de impedancias equivalentes de las fuentes de los
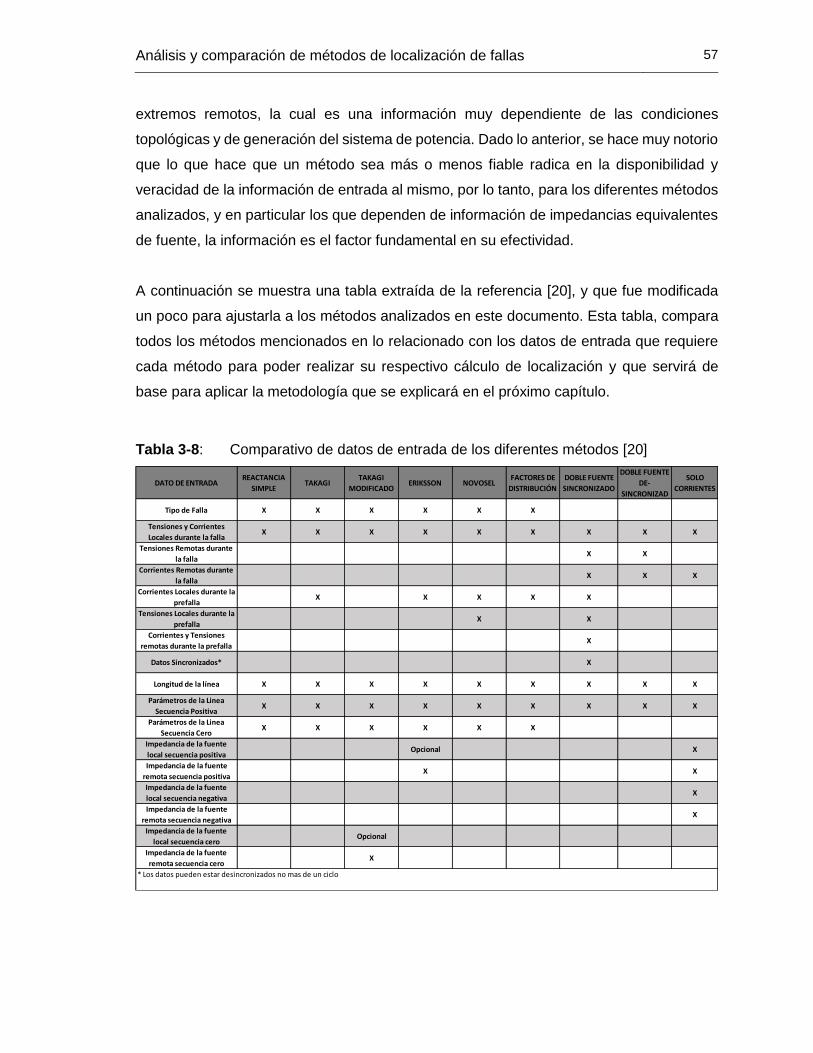
Análisis y comparación de métodos de localización de fallas 57
extremos remotos, la cual es una información muy dependiente de las condiciones
topológicas y de generación del sistema de potencia. Dado lo anterior, se hace muy notorio
que lo que hace que un método sea más o menos fiable radica en la disponibilidad y
veracidad de la información de entrada al mismo, por lo tanto, para los diferentes métodos
analizados, y en particular los que dependen de información de impedancias equivalentes
de fuente, la información es el factor fundamental en su efectividad.
A continuación se muestra una tabla extraída de la referencia [20], y que fue modificada
un poco para ajustarla a los métodos analizados en este documento. Esta tabla, compara
todos los métodos mencionados en lo relacionado con los datos de entrada que requiere
cada método para poder realizar su respectivo cálculo de localización y que servirá de
base para aplicar la metodología que se explicará en el próximo capítulo.
Tabla 3-8: Comparativo de datos de entrada de los diferentes métodos [20]
DATO DE ENTRADAREACTANCIA
SIMPLETAKAGI
TAKAGI
MODIFICADOERIKSSON NOVOSEL
FACTORES DE
DISTRIBUCIÓN
DOBLE FUENTE
SINCRONIZADO
DOBLE FUENTE
DE-
SINCRONIZAD
SOLO
CORRIENTES
Tipo de Falla X X X X X X
Tensiones y Corrientes
Locales durante la fallaX X X X X X X X X
Tensiones Remotas durante
la fallaX X
Corrientes Remotas durante
la fallaX X X
Corrientes Locales durante la
prefallaX X X X X
Tensiones Locales durante la
prefallaX X
Corrientes y Tensiones
remotas durante la prefallaX
Datos Sincronizados* X
Longitud de la línea X X X X X X X X X
Parámetros de la Linea
Secuencia PositivaX X X X X X X X X
Parámetros de la Linea
Secuencia CeroX X X X X X
Impedancia de la fuente
local secuencia positivaOpcional X
Impedancia de la fuente
remota secuencia positivaX X
Impedancia de la fuente
local secuencia negativaX
Impedancia de la fuente
remota secuencia negativaX
Impedancia de la fuente
local secuencia ceroOpcional
Impedancia de la fuente
remota secuencia ceroX
* Los datos pueden estar desincronizados no mas de un ciclo

58 Sistema para la localización automática de fallas en líneas de transmisión
En cuanto a la efectividad de cada uno de los métodos para localizar todos los tipos de
fallas evaluados, que para este trabajo fueron 484 fallas, en la tablas 3.9 y 3.10 , se
muestran la cantidad de fallas en las cuales cada método tuvo un porcentaje de error
menor al 5% (valor que se considera como bueno para este análisis), observándose que
los métodos de doble fuente sincronizado y desincronizado tienen una efectividad del
100% y 99% respectivamente, siempre y cuando se cuente con toda la información,
mientras que el método de solo corrientes y los demás métodos de un extremo presentan
efectividades menores debido a que dependen de información que no se puede extraer de
los registros oscilográficos.
Tabla 3-9: Efectividad métodos doble fuente
Tipo de falla DF Sincronizado DF Desincronizado Solo corrientes
Extremo A [# Fallas]
Extremo B [# Fallas]
Extremo A [# Fallas]
Extremo B [# Fallas]
Extremo A [# Fallas]
Extremo B [# Fallas]
Monofásica 121 121 121 121 49 49
Bifásica Aislada 121 121 121 121 44 44
Bifásica a tierra 121 121 121 121 49 49
Trifásica 121 121 118 117 45 45
Total 484 484 481 480 187 187
Porcentaje 100% 100% 99% 99% 39% 39%

Análisis y comparación de métodos de localización de fallas 59
Tabla 3-10: Efectividad métodos de una fuente
Tipo de falla
Takagi Modificado
Eriksson Distribución
Corriente Reactancia
Extremo A
[# Fallas]
Extremo B
[# Fallas]
Extremo A
[# Fallas]
Extremo B
[# Fallas]
Extremo A
[# Fallas]
Extremo B
[# Fallas]
Extremo A
[# Fallas]
Extremo B
[# Fallas]
Monofásica 98 94 96 83 80 88 70 29
Bifásica 0 0 120 118 86 108 55 87
Bifásica a tierra 0 0 110 108 106 109 101 110
Trifásica 0 0 118 105 85 86 39 45
Total 98 94 444 414 357 391 265 271
Porcentaje 20% 19% 92% 86% 74% 81% 55% 56%
Del análisis de los resultados obtenidos de probar cada método con las diferentes fallas
simuladas y de la bibliografía consultada para su correcto entendimiento se pudo extraer
la prioridad para la aplicación de cada método o dicho de otra manera, el peso que se le
debe dar a cada método en el caso de que todos se puedan utilizar y en consecuencia se
tenga acceso a varios resultados posibles. Del análisis se pudo concluir que el orden en el
que deben ser aplicados los métodos para obtener la localización más confiable en el caso
de que se tenga toda la información necesaria para aplicarlos es el que se muestra a
continuación:
1. Método doble fuente sincronizado
2. Método doble fuente desincronizado
3. Método Takagi Modificado (solo se utiliza en falla monofásica)
4. Método Eriksson
5. Método de factores de distribución de corrientes de falla
6. Método de reactancia simple
7. Método solo corrientes
Se debe aclarar que el método de solo corrientes solo será utilizado en el caso de que se
cuente con registros de ambos extremos y ninguno de estos tenga tensiones de falla.


4. Metodología para el cálculo automático de localización de fallas
En términos generales, por medio de este trabajo se busca llegar a una metodología que
permita calcular la localización de fallas en líneas de transmisión a partir de la información
de corrientes y tensiones antes y durante las fallas, obtenidas de los registros
oscilográficos en formato COMTRADE, almacenados por los registradores de fallas y relés
de protección instalados en las bahías a lado y lado de las líneas de transmisión, por lo
cual, se debieron analizar las características propias de diversos métodos de localización
de fallas y los datos de entrada de cada uno, entre los que se incluyen valores de
corrientes, tensiones, impedancias de las líneas y equivalentes en los extremos de las
líneas al momento de la falla.
Antes de analizar la metodología planteada para realizar el cálculo automático para
localización de falla en líneas de transmisión, es importante recordar que se utilizaron siete
de los métodos analizados, lo cual permite que aquellas fallas que no pueden ser
detectadas por un tipo de método o que presenten alta incertidumbre (porcentaje de error),
si puedan ser localizadas por otro con un menor porcentaje de error.
4.1 Redes de Petri
Para llegar a la metodología para la implementación del sistema planteado en este
documento, se utilizó Redes de Petri –RP–, la cual es una herramienta que permite al
usuario interactuar en un entorno especial para el modelamiento, análisis y diseño de
sistemas de eventos discretos [29]
Las redes de Petri fueron creadas en 1962 por Carl A. Petri y a partir de esa época han
sido usadas para la programación de autómatas [29]. La referencia [29] indica que las
62 Sistema para la localización automática de fallas en líneas de transmisión
redes de Petri como herramienta gráfica son un gran medio de comunicación entre los
usuarios, clientes y requerimientos de ingeniería, mientras que como herramienta
matemática, al permitir modelar el sistema por medio de ecuaciones algebraicas, abre las
puertas al análisis formal del modelo que se está evaluando o analizando.
Teniendo en cuenta lo descrito en el párrafo anterior y otras características de las redes
de Petri descritas en la referencia [29], en el presente trabajo se utilizó esta herramienta
para plantear una metodología de automatización para la selección del algoritmo de
localización de fallas en líneas de transmisión más adecuado de acuerdo a los parámetros
de entrada de estos y de sus características propias, lo cual permitió identificar las
diferentes variables que pueden llegar a interactuar dentro del proceso de selección del
método idóneo y adicionalmente, permitió comprender el proceso de selección en su
totalidad y de esta manera poder implementar un prototipo. Para la implementación de la
red de Petri se utilizó el programa libre CPN Tools [30].
4.2 Metodología
Para poder entender la metodología desarrollada a través de la red de Petri, la red se
dividirá en tres partes: la primera está asociada a la carga de los archivos COMTRADE
necesarios para realizar el cálculo de la localización y la identificación de la línea y fase
fallada, la segunda tiene que ver con la prioridad en la utilización de los métodos y la tercera
con la ejecución en sí de cada método de localización a partir de la información de entrada
disponible, la cual se obtuvo del análisis realizado en el capítulo 3 de este documento.
4.2.1 Identificación de línea y fase fallada y carga de información
Para comenzar el análisis de localización de una falla en una línea de transmisión, la
primera información que se requiere es precisamente la línea de transmisión sobre la que
se presenta la falla y cuál es el tipo de falla que se presenta (monofásica, bifásica, trifásica)
y para obtener esta información es posible utilizar la información del Sequence Of Events
–SOE–, el cual es obtenido de los sistemas SCADA y básicamente es un histórico de la
señalización digital de las subestaciones de un sistema potencia, en donde se tiene
señalización de arranque y disparo de protecciones, posición de interruptores y
seccionadores, entre otras señales.

Metodología para el cálculo automático de localización de fallas 63
Figura 4-1: Ejemplo de SOE de una falla
Teniendo en cuento lo anterior, la primera parte de la red de Petri desarrollada en CPN
Tools, muestra el paso a paso desde que se inicia el sistema hasta que identifica la línea
y fase fallada (tipo de falla). En la Figura 4-2 se puede observar que luego de que inicia el
sistema, comienza la identificación de los datos de entrada, los cuales pueden ser dados
directamente por el usuario (ANALISIS SIN SOE) u obtenidos por medio del análisis del
SOE del evento (ANALISIS CON SOE). En el “ANALISIS SIN SOE” básicamente al usuario
se le da la libertad de seleccionar la línea fallada y el tipo de falla de un listado de líneas y
otro de tipos de fallas, mientras que en el lazo “ANALISIS CON SOE”, el usuario debe
cargar un archivo de SOE y el sistema realizará el análisis del archivo para determinar la
línea fallada y el tipo de falla y en el caso de que no pueda determinar o detecte una línea
o tipo de falla incorrecta, le dará la posibilidad al usuario de modificar los datos de entrada
a su voluntad. Finalmente, los datos de la línea fallada y el tipo de falla se almacenarán
para ser utilizados durante la ejecución del sistema.
Posterior a esto, el sistema comienza con la fase de carga de los archivos COMTRADE de
cada extremo de la línea en el caso de que se cuente con ellos, para lo cual primero se
solicita la información de un extremo (que a partir de ahora se denominará extremo A) y
luego la información del extremo faltante (que a partir de ahora se denominará extremo B).
En el caso de que al abrir el sistema, y se quiera volver a cerrar, al inicio de la red está la
transición “CERRAR SISTEMA”.

64 Sistema para la localización automática de fallas en líneas de transmisión
Figura 4-2: Red de Petri –RP– identificación de la línea y fase fallada. CPN Tools
Como se observa en la Figura 4-3, cuando se llega al nodo “HAY REGISTRO EXTREMO
A” se espera a que el usuario indique si cuenta o no con archivo COMTRADE, en caso de
contar con el archivo este se abre y carga en el sistema y se almacena una variable que
indica que el registro del extremo A esta cargado, en el caso contrario se almacena en la
variable “reg_a” que no hay registro en el extremo A.
Figura 4-3: RP carga de archivo COMTRADE del extremo A. CPN Tools
Luego de la carga del archivo COMTRADE del extremo A, se pasa a la carga del archivo
del extremo B de la línea de transmisión, para lo cual se sigue el mismo procedimiento
descrito anteriormente, con la diferencia de que la variable en la que se almacena la
información de si hay o no archivo del extremo B cargado en el sistema cambia por “reg_b”

Metodología para el cálculo automático de localización de fallas 65
(Figura 4-4). Adicionalmente, en esta parte de la RP se verifica que el sistema tenga
cargado al menos un registro de un extremo, y en el caso de que el usuario indique que
no tiene registros de ninguno de los dos extremos de la línea, el sistema finalizará su
ejecución llegando al nodo “FIN”, debido a que no se contaría con información de corrientes
y tensiones antes y durante la falla. Finalmente, en el caso de contar con registros de al
menos uno de los dos extremos de la línea, el sistema pasa al nodo “ANALISIS” y de
acuerdo con el tipo de falla encontrada en la primera parte de la red, el sistema decidirá
hacia que parte de la debe seguir.
Figura 4-4: RP carga de archivo COMTRADE del extremo B. CPN Tools
4.2.2 Prioridad en la utilización de los métodos
La segunda parte de la metodología para la localización de fallas tiene en cuenta las
conclusiones del capítulo 3, en donde se identificó la prioridad en la utilización de los
métodos, es decir, al momento de tener los registros COMTRADE cuál método debe ser
utilizado en primer lugar, cual en segundo, tercero y así hasta encontrar el método
adecuado de acuerdo con la información de entrada disponible en el momento del análisis.

66 Sistema para la localización automática de fallas en líneas de transmisión
En la Figura 4-5, se muestra la secuencia propuesta para la utilización de los métodos para
una falla monofásica, notándose que el nodo “ANALISIS”, que se encuentra al final de la
primera parte de la red, y nodo “TIPO DE FALLA” son los que sensibilizan la transición
“CALCULO DF SINCRONIZADO”, con la cual se arranca la verificación de las condiciones
para la ejecución del primer método de localización. Para que arranque la ejecución del
segundo método, el primer método debe estar indisponible, luego para que arranque la
ejecución del tercer método el segundo debe estar indisponible y así sucesivamente hasta
que se arranquen todos los métodos y el caso de que todos estén indisponibles, debido a
que no se cuenta con los datos de entrada suficientes para su ejecución, el sistema deberá
sacar un mensaje que indique que no se pudo ejecutar ningún método por falta de
información.
Figura 4-5: RP priorización de métodos para falla monofásica. CPN Tools

Metodología para el cálculo automático de localización de fallas 67
En el caso de que se pueda ejecutar alguno de los métodos y este entregue un resultado,
el sistema finalizará su ejecución, esto se verá en detalle en el numeral 4.2.3. Para las
fallas bifásica aisladas y a tierra y trifásicas, se tienen redes similares a las mostradas en
la Figura 4-5, las cuales se pueden observar en el anexo 0, con la diferencia de que el
método Takagi Modificado no se utilizada debido a que este método solo se utilizó para
localizar fallas monofásicas.
4.2.3 Ejecución de los métodos de localización
La tercera parte de la metodología tiene que ver con la utilización de los métodos de
localización. En la Figura 4-6 se puede observar la red desarrollada para la ejecución del
método doble fuente sincronizado. Gráficamente, esta red se encuentra dividida en tres
columnas, la primera columna contiene los nodos que almacenan la información disponible
para realizar los cálculos, entre la que se encuentra registros de fallas, indicación de si los
registros están sincronizados, corrientes y tensiones de falla y pre-falla en cada extremo e
impedancias de fuente equivalente. La información asociada a las impedancias y longitud
de la línea fallada no se asociaron a ninguna entrada, debido a que estos parámetros son
comunes a todos los métodos, y estos se tomaran de una base de datos de acuerdo a la
línea seleccionada en la parte de la red descrita en el numeral 4.2.1.
Figura 4-6: RP ejecución del método doble fuente sincronizado. CPN Tools

68 Sistema para la localización automática de fallas en líneas de transmisión
La segunda columna contiene las transiciones que indican la disponibilidad o
indisponibilidad de ejecutar el método a partir de la información detallada en la primera
columna, en la Figura 4-6, se nota que si toda la información que necesita el método está
disponible y el nodo “ARRANQUE”, que proviene de la red de priorización explicada en el
numeral anterior, se encuentra activo el método se ejecuta, mientras que si falta
información alguna información se activará la transición que indica que el método está
indisponible y por ende el sistema buscará otro método para realizar el cálculo de la
localización. Finalmente, se tiene la tercera columna, la cual solo aplica en el caso de que
el método de localización se ejecute, para lo cual el sistema validará cual es la tipo de falla
e imprimirá el resultado para el tipo que tenga almacenada.
Como se pudo observar en la segunda parte de la red de Petri desarrollada, la prioridad
en la utilización de los métodos la encabezan los métodos de localización de dos extremos,
debido a sus bajos porcentajes de error, pero el caso de que se cuente con la información
de los dos extremos de la línea pero por algún motivo no se puedan ejecutar ninguno de
los dos métodos de localización de doble fuente (sincronizado o desincronizado) y si se
pueda ejecutar un método de un extremo tanto para el extremo A como para el extremo B,
el sistema entregará el resultado de los dos extremos.
Las redes de Petri de los demás métodos de localización son redes similares a la mostrada
en la Figura 4-6 y se pueden detallar en el Anexo C.

5. Prototipo y pruebas del sistema
Finalmente, luego de seleccionar y probar diferentes métodos de localización de fallas en
líneas de transmisión y de proponer una metodología para utilizarlos de manera paralela
de modo que se pueda obtener un resultado confiable a partir de la información disponible,
este trabajo finaliza con el diseño de un prototipo de un sistema para la localización
automática de fallas en líneas de transmisión. El prototipo fue realizado en la herramienta
Visual Basic for Aplications del programa Excel de Microsoft Office con ayuda de los libros
de las referencias [31] y [32].
Para la implementación del prototipo diseñado en este trabajo se siguió la metodología
planteada en el capítulo 4, lo cual permitió que el desarrollo del algoritmo fuera más sencillo
que si se hubiese realizado desde cero sin una metodología pre establecida. Por otro lado,
en este capítulo se realizarán las pruebas al sistema diseñado y se comparará con los
resultados de cada método de manera independiente ahora considerando limitaciones en
la información de entrada.
5.1 Prototipo diseñado
Al igual que la metodología presentada en el capítulo anterior, el prototipo diseñado para
probar las pruebas se implementó por partes.
La primera parte del prototipo está asociada a identificación de la línea fallada y el tipo de
falla, para esto se desarrolló un código que leyera un SOE del tipo mostrado en la Figura
4-1, de modo que si por medio de este se puede identificar la línea y el tipo de falla, se
solicitará al usuario confirmar lo encontrado, en caso de que no se pueda detectar alguna
de las dos cosas o el usuario indique que el resultado del análisis es incorrecto, se pasará
a una ventana donde se puede seleccionar la línea fallada y el tipo de falla, como la que
se muestra a continuación.
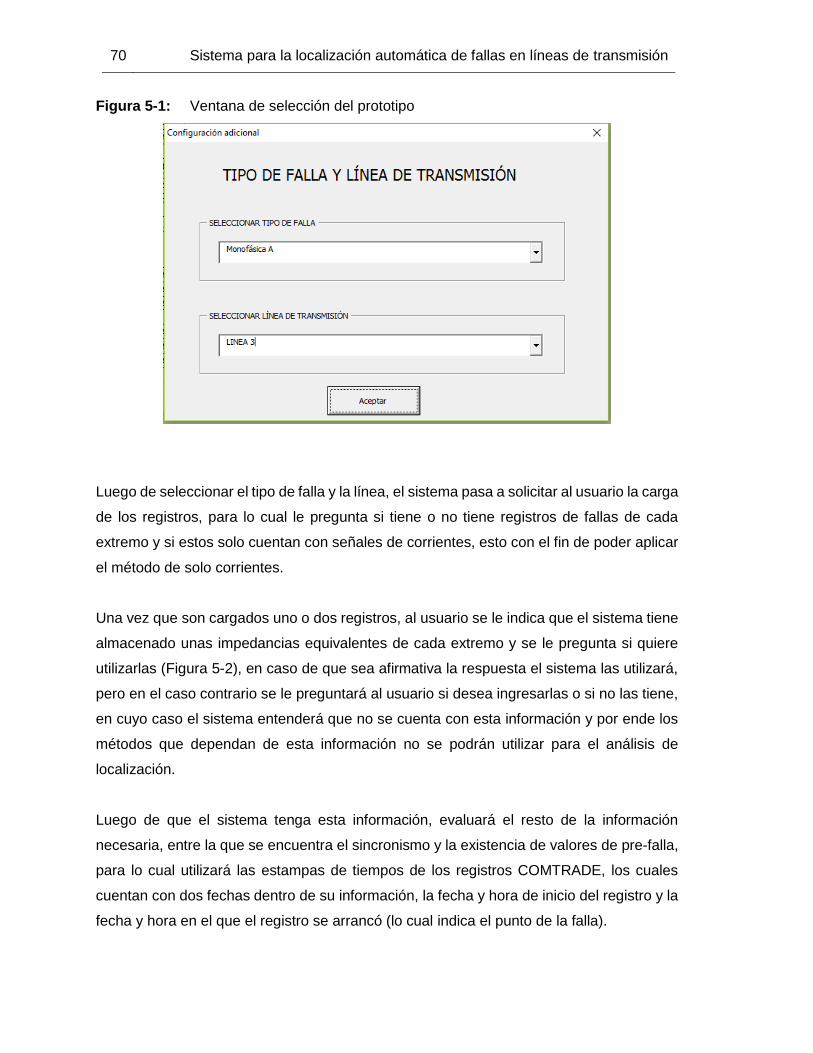
70 Sistema para la localización automática de fallas en líneas de transmisión
Figura 5-1: Ventana de selección del prototipo
Luego de seleccionar el tipo de falla y la línea, el sistema pasa a solicitar al usuario la carga
de los registros, para lo cual le pregunta si tiene o no tiene registros de fallas de cada
extremo y si estos solo cuentan con señales de corrientes, esto con el fin de poder aplicar
el método de solo corrientes.
Una vez que son cargados uno o dos registros, al usuario se le indica que el sistema tiene
almacenado unas impedancias equivalentes de cada extremo y se le pregunta si quiere
utilizarlas (Figura 5-2), en caso de que sea afirmativa la respuesta el sistema las utilizará,
pero en el caso contrario se le preguntará al usuario si desea ingresarlas o si no las tiene,
en cuyo caso el sistema entenderá que no se cuenta con esta información y por ende los
métodos que dependan de esta información no se podrán utilizar para el análisis de
localización.
Luego de que el sistema tenga esta información, evaluará el resto de la información
necesaria, entre la que se encuentra el sincronismo y la existencia de valores de pre-falla,
para lo cual utilizará las estampas de tiempos de los registros COMTRADE, los cuales
cuentan con dos fechas dentro de su información, la fecha y hora de inicio del registro y la
fecha y hora en el que el registro se arrancó (lo cual indica el punto de la falla).

Prototipo y pruebas del sistema 71
Figura 5-2: Ventana de impedancias equivalentes
Finalmente, luego de completar toda la información solicitada por el sistema, este arroja el
resultado con la información disponible, como se muestra en la siguiente figura.
Figura 5-3: Ventana de resultado del prototipo
Ahora bien, si el usuario está interesado en identificar por qué motivo el sistema escogió
este método para localizar la falla, también se dejó la opción de que el usuario pueda ver
la siguiente tabla, en la cual se puede tiene la información con la que cuenta el sistema,
en la columna “VALOR REAL” y en la columna asociada a cada método, se encuentra si
el método que se quiere evaluar tiene la información necesaria o no para realizar el cálculo
(el símbolo verde indica que el valor que aparece en la columna “VALOR REAL” le sirve al
método para realizar el cálculo y el símbolo rojo indica que la información no está
disponible y el método lo necesita). Como se puede ver en este ejemplo, como solo hay
registros en el extremo B y se cuenta con las impedancias equivalentes del extremo A, el
sistema escogió el método Takagi modificado como el ideal. En esta tabla, para que un
método esté disponible para realizar el cálculo todas las celdas bajo el nombre del método
deben tener el símbolo verde. Adicionalmente, se puede observar el valor de localización
que arroja cada si está disponible.

72 Sistema para la localización automática de fallas en líneas de transmisión
Figura 5-4: Ventana ejemplo de evaluación de los métodos
Extremo A Extremo B Extremo A Extremo B Extremo A Extremo B Extremo A Extremo B
Disponibilidad
del MetodoNA Indisponible Indisponible Indisponible Indisponible Disponible Indisponible Disponible Indisponible Disponible Indisponible Disponible
Registros A [REG_A]
Registros B [REG_B]
Registros Sincronizados [SINC]
Tensiones de falla extremo A
[TEN_F_A]Corrientes de falla extremo A
[COR_F_A]Tensiones de Prefalla extremo A
[TEN_P_A]Corrientes de Prefalla extremo A
[COR_P_A]Tensiones de falla extremo B
[TEN_F_B]Corrientes de falla extremo B
[COR_F_B]Tensiones de Prefalla extremo B
[TEN_P_B]Corrientes de Prefalla extremo B
[COR_P_B]Imp. fuente local secuencia positiva
[IMP_P_A]
Imp. fuente remota secuencia
positiva [IMP_P_B]
Imp. fuente local secuencia negativa
[IMP_N_A]
Imp. fuente remota secuencia
negativa [IMP_N_B]
Imp. fuente local secuencia cero
[IMP_C_A]
Imp. fuente remota secuencia cero
[IMP_C_B]
Registro A con Solo Corrientes
Registro B con Solo Corrientes
Tipo de falla Monofásica A
Localización desde
Extremo A [km]NA Indisponible Indisponible Indisponible Indisponible 44.39 Indisponible 45.33 Indisponible 45.2 Indisponible 48.89
Información Indisponible
Información Disponible
VariableDF
Desincronizado
Solo
Corrientes
Takagi Modificado Eriksson Factores de Distribución Reactancia SimpleVALOR REAL
DF
Sincronizado

Prototipo y pruebas del sistema 73
5.2 Pruebas del sistema
Luego de diseñar el prototipo se pasa a la etapa de pruebas, para lo cual se utilizaron las
484 fallas simuladas con las que se probaron uno a uno los diferentes métodos planteados
en este trabajo, la única diferencia es que para la realizar estas pruebas no se utilizó toda
la información (datos de entrada) disponible para la aplicación de los métodos, sino que se
limitaron los datos de entrada al sistema de modo que este se vea obligado a utilizar
diferentes métodos para los diferentes tipos de fallas.
En las pruebas se tomaron las fallas simuladas en ATPDraw y se distribuyeron en 8 casos
diferentes (4 casos con 61 fallas cada uno y 4 casos con 60 fallas cada uno), donde lo que
diferencia a cada caso es la información de entrada disponible para poder realizar el
análisis. En la siguiente tabla, se puede observar la información que se estará disponible
para cada uno de los casos, en donde el símbolo verde indica que la información está
disponible mientras que el símbolo en color rojo indica que la información no está
disponible para ser utilizada en los diferentes métodos.
Tabla 5-1: Disponibilidad de la información para los casos propuestos
Regis tros A [REG_A]
Regis tros B [REG_B]
Regis tros Sincronizados [SINC]
Tens iones de fa l la extremo A [TEN_F_A]
Corrientes de fa l la extremo A [COR_F_A]
Tens iones de Prefa l la extremo A [TEN_P_A]
Corrientes de Prefa l la extremo A [COR_P_A]
Tens iones de fa l la extremo B [TEN_F_B]
Corrientes de fa l la extremo B [COR_F_B]
Tens iones de Prefa l la extremo B [TEN_P_B]
Corrientes de Prefa l la extremo B [COR_P_B]
Imp. fuente loca l secuencia pos i tiva [IMP_P_A]
Imp. fuente remota secuencia pos i tiva [IMP_P_B]
Imp. fuente loca l secuencia negativa [IMP_N_A]
Imp. fuente remota secuencia negativa [IMP_N_B]
Imp. fuente loca l secuencia cero [IMP_C_A]
Imp. fuente remota secuencia cero [IMP_C_B]
Regis tro A con Solo Corrientes
Regis tro B con Solo Corrientes
Información disponible
Información indisponible
Caso 6 Caso 7 Caso 8Información Caso 1 Caso 2 Caso 3 Caso 4 Caso 5

74 Sistema para la localización automática de fallas en líneas de transmisión
Una vez definidos los casos, se realizó la distribución de las 484 fallas simuladas en los 8
casos propuestos en este capítulo, para esto en primera instancia estas se dividieron en 4
grupos de 121 fallas, un grupo por cada tipo de falla (monofásica, bifásica aislada, bifásica
a tierra y trifásica) y a su vez las 121 fallas de cada grupo se distribuyeron en los 8 casos
propuestos de acuerdo a lo mostrado en la Tabla 5 2, en donde se tienen fallas cada 10%
de la línea y con diferentes valores de impedancia de falla (de 0 a 50 Ohmios).
Tabla 5-2: Distribución de los diferentes tipos fallas en cada caso
Simultáneo con las pruebas que se realizaron al prototipo planteado, y tal como se realizó
en el capítulo 3, nuevamente se hicieron pruebas a cada método de manera independiente,
pero con la diferencia de que en estas pruebas la información no estaba completa para
realizar los cálculos de cada uno, lo anterior, con el fin de probar la verdadera efectividad
de cada método ante las diferentes condiciones de entrada. Al igual que las pruebas
realizadas anteriormente, en la siguiente tabla se muestra la cantidad de fallas en las
cuales cada método y el sistema propuesto presentaron un porcentaje de error menor al
5%.
0 5 10 15 20 25 30 35 40 45 50
0 1 2 3 4 5 6 7 8 1 2 3
10 4 5 6 7 8 1 2 3 4 5 6
20 7 8 1 2 3 4 5 6 7 8 1
30 2 3 4 5 6 7 8 1 2 3 4
40 5 6 7 8 1 2 3 4 5 6 7
50 8 1 2 3 4 5 6 7 8 1 2
60 3 4 5 6 7 8 1 2 3 4 5
70 6 7 8 1 2 3 4 5 6 7 8
80 1 2 3 4 5 6 7 8 1 2 3
90 4 5 6 7 8 1 2 3 4 5 6
100 7 8 1 2 3 4 5 6 7 8 1
Ub
icac
ión
re
al d
e la
fal
la [
%]
Resistencia de falla [Ohm]
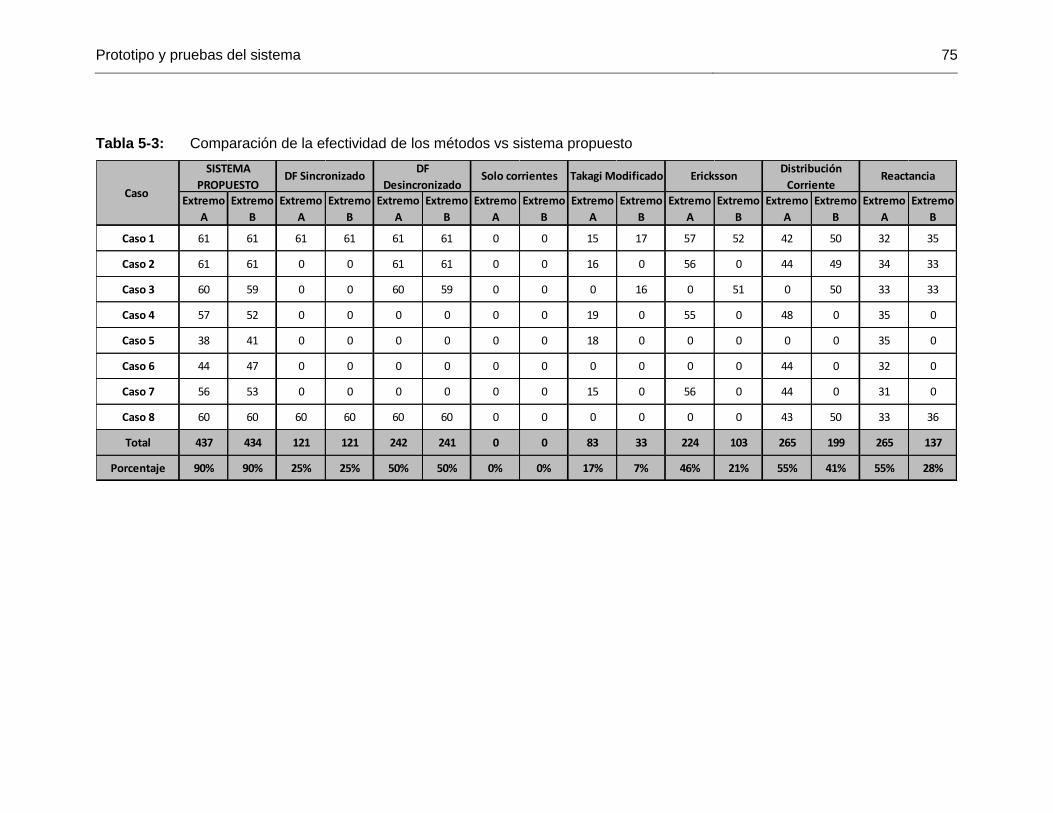
Prototipo y pruebas del sistema 75
Tabla 5-3: Comparación de la efectividad de los métodos vs sistema propuesto
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Extremo
A
Extremo
B
Caso 1 61 61 61 61 61 61 0 0 15 17 57 52 42 50 32 35
Caso 2 61 61 0 0 61 61 0 0 16 0 56 0 44 49 34 33
Caso 3 60 59 0 0 60 59 0 0 0 16 0 51 0 50 33 33
Caso 4 57 52 0 0 0 0 0 0 19 0 55 0 48 0 35 0
Caso 5 38 41 0 0 0 0 0 0 18 0 0 0 0 0 35 0
Caso 6 44 47 0 0 0 0 0 0 0 0 0 0 44 0 32 0
Caso 7 56 53 0 0 0 0 0 0 15 0 56 0 44 0 31 0
Caso 8 60 60 60 60 60 60 0 0 0 0 0 0 43 50 33 36
Total 437 434 121 121 242 241 0 0 83 33 224 103 265 199 265 137
Porcentaje 90% 90% 25% 25% 50% 50% 0% 0% 17% 7% 46% 21% 55% 41% 55% 28%
Caso
SISTEMA
PROPUESTODF Sincronizado
DF
DesincronizadoSolo corrientes Takagi Modificado Ericksson
Distribución
CorrienteReactancia

76 Sistema para la localización automática de fallas en líneas de transmisión
En la Tabla 5 3 se observa que con las nuevas pruebas realizadas, cada uno de los
métodos de localización baja considerablemente su porcentaje de efectividad en
comparación con los resultados obtenidos al aplicar las mismas fallas con toda la
información que necesita cada método, lo cual se muestra en la Tabla 3 9 y la Tabla 3 10.
Lo más notorio es como los métodos de dos extremos, los cuales presentan una alta
efectividad cuando cuentan con los registros de ambos extremos, bajan su efectividad
debido a que al solo contar con el registro de uno de los extremos de la línea, el método
no puede ser utilizado.
Por otro lado, se puede observar que de las 484 fallas que se le aplicaron al sistema
propuesto, en el 90% de ellas el sistema propuesto entregó una localización con un
porcentaje de error menor al 5%, esto tomando en cuenta que al utilizar el prototipo no se
contaba con algunos datos de entrada como se explicó anteriormente, pero debido a la
utilización en paralelo de los 7 métodos se logra obtener un desempeño satisfactorio para
el sistema.
Una particularidad de la Tabla 5 3, es que el método de solo corrientes muestra una
efectividad el 0%, pero este resultado realmente se debe a que en los ocho casos
planteados para la pruebas, en todos se consideró que los valores de tensiones y
corrientes siempre estaban en los registros COMTRADE y como se mencionó
anteriormente, este método solo se utilizará en el caso de que no se cuente con valores
de tensiones en los dos registros, lo cual es algo muy difícil que se presente en la realidad
dado que los registros generados por los relés de protección o registradores de fallas
normalmente cuentan con señales de tensiones y corrientes de manera simultánea. El
motivo principal por el cual no se utiliza este método cuando se tienen registros con valores
de tensiones y corrientes, es que el método depende de las impedancias equivalentes de
las fuentes en ambos extremos de la línea para entregar un resultado confiable.

6. Conclusiones y recomendaciones
6.1 Conclusiones
En este documento se ha realizado una descripción del estado del arte acerca del tema de
localización de fallas comenzando en el cálculo de los parámetros de las líneas de
transmisión y pasando por los tipos de métodos de localización de fallas y terminando en
aplicaciones en tiempo real para la localización de fallas, encontrándose que existe una
variedad de métodos que permiten realizar la localización de fallas en sistemas de potencia
y cada uno cuenta con características propias que los diferencian entre sí, y es por este
motivo que antes de buscar el mejor método de localización, lo que se debe tener en cuenta
es cuál es el que mejor se acomoda a las características propias del sistema de potencia
sobre el cual se trabaja.
Dentro de este trabajo se realizó análisis de nueve métodos de localización de fallas en
líneas de transmisión y de este análisis, se logró encontrar que los métodos basados en
información de dos extremos presentan una efectividad muy alta para todo tipo de fallas,
localizaciones y resistencias de fallas, pero también se pudo encontrar que los métodos
que se basan en información de un solo extremo de la línea, presentan un buen
desempeño para fallas cercanas al punto de medida y entre menor sea la resistencia de
falla su porcentaje error también bajará, ahora bien, en la medida que estos dos
parámetros (localización y resistencia de falla) aumentan, los porcentajes de error de los
métodos de un extremo tienden a aumentar debido al efecto reactancia que se presenta al
tener sistemas enmallados y tratar de calcular una impedancia (medida indirecta de la
localización) con la información de un solo extremo, por lo tanto a partir de la bibliografía
consultada y de los resultados de las pruebas de los métodos se puede concluir que los
métodos de localización de un extremo son una alternativa muy viable, pero deben ser
utilizados con precaución, dado que si se desconocen los impactos que puede tener el

78 Sistema para la localización automática de fallas en líneas de transmisión
efecto reactancia en los cálculos, se puede llegar a un análisis inadecuado de la
localización.
Al analizar los diferentes métodos de la bibliografía, se logró encontrar ventajas y
desventajas de cada uno, observándose que a pesar que cada uno tiene características
propias las ventajas y desventajas tienden a repetirse, pero lo que resulta la ventaja o
desventaja más importante en cada método, termina siendo la propia información que
requiere cada uno para su utilización, y es esta información de entrada lo que llevó a poder
definir una metodología para utilizarlos en un orden especifico, permitiendo así alcanzar la
meta de localizar un porcentaje de fallas superior en comparación al porcentaje al que se
podría llegar si solo se utiliza un método de manera aislada.
Luego del análisis de los métodos, se logró encontrar 7 métodos basados en impedancia
que en su conjunto presentan características que permiten localizar con un bajo porcentaje
de error (porcentajes de error menores al 5%) cerca del 90% de las fallas evaluadas, donde
este resultado se vuelve más representativo, cuando tomamos en cuenta que este
porcentaje de efectividad se alcanza con limitación en la información de entrada de los
métodos de localización. Es importante anotar, que en este trabajo se analizaron métodos
basados en impedancia, pero este mismo análisis se puede realizar con otros muchos
métodos que existen en la bibliografía y que no fueron tenidos en cuenta en esta propuesta.
Ya teniendo unos métodos y prioridades de utilización definidas, se utilizó la herramienta
de redes de Petri para definir de una manera formal y practica una metodología que
permitiera diseñar un prototipo del sistema planteado y así poder probarlo. La metodología
diseñada para implementar un sistema de localización automático de fallas en líneas de
transmisión resultó siendo simple pero efectiva para la muestra de fallas evaluadas. La
metodología planteada considera como principal insumo, los datos de entrada de cada
método de localización, pero también toma en cuenta sus características a la hora de
definir cuál método utilizar para entregar un resultado confiable.
Finalmente, se pudo diseñar un prototipo por medio de VBA de Excel, el cual se basó en
la metodología elaborada con la ayuda de las redes de Petri. Por medio de este prototipo
se probaron las diferentes fallas simuladas y se logró obtener el resultado planteado desde
los objetivos de este trabajo. Es importante resaltar que el desarrollo del prototipo, a pesar
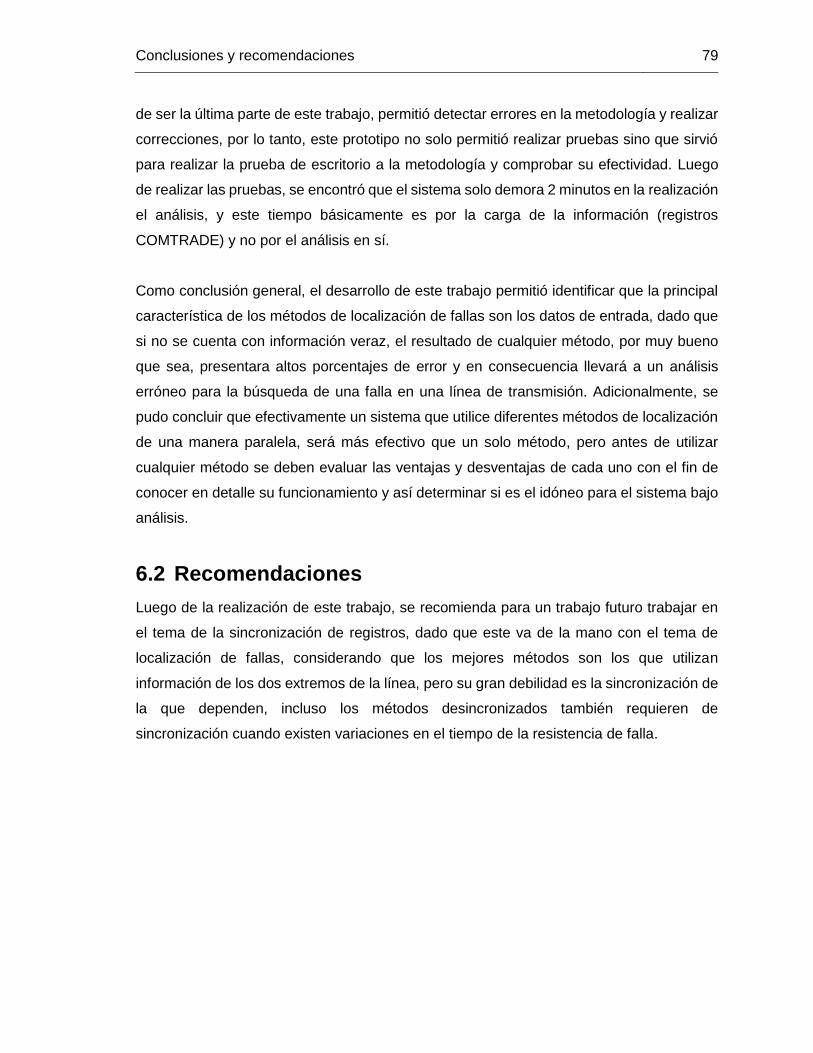
Conclusiones y recomendaciones 79
de ser la última parte de este trabajo, permitió detectar errores en la metodología y realizar
correcciones, por lo tanto, este prototipo no solo permitió realizar pruebas sino que sirvió
para realizar la prueba de escritorio a la metodología y comprobar su efectividad. Luego
de realizar las pruebas, se encontró que el sistema solo demora 2 minutos en la realización
el análisis, y este tiempo básicamente es por la carga de la información (registros
COMTRADE) y no por el análisis en sí.
Como conclusión general, el desarrollo de este trabajo permitió identificar que la principal
característica de los métodos de localización de fallas son los datos de entrada, dado que
si no se cuenta con información veraz, el resultado de cualquier método, por muy bueno
que sea, presentara altos porcentajes de error y en consecuencia llevará a un análisis
erróneo para la búsqueda de una falla en una línea de transmisión. Adicionalmente, se
pudo concluir que efectivamente un sistema que utilice diferentes métodos de localización
de una manera paralela, será más efectivo que un solo método, pero antes de utilizar
cualquier método se deben evaluar las ventajas y desventajas de cada uno con el fin de
conocer en detalle su funcionamiento y así determinar si es el idóneo para el sistema bajo
análisis.
6.2 Recomendaciones
Luego de la realización de este trabajo, se recomienda para un trabajo futuro trabajar en
el tema de la sincronización de registros, dado que este va de la mano con el tema de
localización de fallas, considerando que los mejores métodos son los que utilizan
información de los dos extremos de la línea, pero su gran debilidad es la sincronización de
la que dependen, incluso los métodos desincronizados también requieren de
sincronización cuando existen variaciones en el tiempo de la resistencia de falla.

A. Anexo: Coeficientes de ponderación para cálculo de corriente total de falla
De acuerdo con la referencia [21], los coeficientes de ponderación para el cálculo de la
corriente total de falla en una línea de transmisión dependerán del tipo de falla que se
presente y de la componente simétrica a la que se quiera dar prioridad. Dado lo anterior,
la misma referencia muestra tres tablas de coeficientes dependiendo de la componente
simétrica de preferencia.
Tabla A-1: Conjunto de coeficientes de ponderación con eliminación de la secuencia cero y priorizando la secuencia negativa sobre la positiva [21]
Tipo de falla Corriente total
de falla 𝑎𝐹1 𝑎𝐹2 𝑎𝐹0
ae 𝐼𝐹𝒂 0 3 0
be 𝐼𝐹𝑏 0 -1.5+j1.5√3 0
ce 𝐼𝐹𝑐 0 -1.5-j1.5√3 0
ab 𝐼𝐹𝒂 − 𝐼𝑭𝒃 0 1.5-j0.5√3 0
bc 𝐼𝐹𝑏 − 𝐼𝑭𝒄 0 j√3 0
ca 𝐼𝐹𝑐 − 𝐼𝑭𝒂 0 -1.5-j0.5√3 0
abe 𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 1.5-j0.5√3 0
bce 𝐼𝐹𝑏 − 𝐼𝑭𝒄 -j√3 j√3 0
cae 𝐼𝐹𝑐 − 𝐼𝑭𝒂 1.5-j0.5√3 1.5+j0.5√3 0
abc abce*
𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 (1.5-j0.5√3)** 0
* El loop a-b es utilizado sin embargo se pueden utilizar los loops b-c y c-a ** Este coeficiente es diferente de cero; sin embargo la secuencia negativa no está presente

Anexo B. Resultados método factores de distribución de corrientes de fallas 81
Tabla A-2: Conjunto de coeficientes de ponderación con eliminación de la secuencia cero y priorizando la secuencia positiva sobre la negativa [21]
Tipo de falla Corriente total
de falla 𝑎𝐹1 𝑎𝐹2 𝑎𝐹0
ae 𝐼𝐹𝒂 3 0 0
be 𝐼𝐹𝑏 -1.5-j1.5√3 0 0
ce 𝐼𝐹𝑐 -1.5+j1.5√3 0 0
ab 𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 0 0
bc 𝐼𝐹𝑏 − 𝐼𝑭𝒄 -j√3 0 0
ca 𝐼𝐹𝑐 − 𝐼𝑭𝒂 -1.5+j0.5√3 0 0
abe 𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 1.5-j0.5√3 0
bce 𝐼𝐹𝑏 − 𝐼𝑭𝒄 -j√3 j√3 0
cae 𝐼𝐹𝑐 − 𝐼𝑭𝒂 1.5-j0.5√3 1.5+j0.5√3 0
abc abce*
𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 (1.5-j0.5√3)** 0
* El loop a-b es utilizado sin embargo se pueden utilizar los loops b-c y c-a ** Este coeficiente es diferente de cero; sin embargo la secuencia negativa no está presente
Tabla A-3: Conjunto de coeficientes de ponderación con eliminación de la secuencia cero y utilizando las secuencias negativa y positiva [21]
Tipo de falla Corriente total
de falla 𝑎𝐹1 𝑎𝐹2 𝑎𝐹0
ae 𝐼𝐹𝒂 1.5 1.5 0
be 𝐼𝐹𝑏 -0.75-j0.75√3 -0.75+j0.75√3 0
ce 𝐼𝐹𝑐 -0.75+j0.75√3 -0.75-j0.75√3 0
ab 𝐼𝐹𝒂 − 𝐼𝑭𝒃 0.75+j0.25√3 0.75-j0.25√3 0
bc 𝐼𝐹𝑏 − 𝐼𝑭𝒄 -j0.5√3 j0.5√3 0
ca 𝐼𝐹𝑐 − 𝐼𝑭𝒂 -0.75+j0.25√3 -0.75-j0.25√3 0
abe 𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 1.5-j0.5√3 0
bce 𝐼𝐹𝑏 − 𝐼𝑭𝒄 -j√3 j√3 0
cae 𝐼𝐹𝑐 − 𝐼𝑭𝒂 1.5-j0.5√3 1.5+j0.5√3 0
abc abce*
𝐼𝐹𝒂 − 𝐼𝑭𝒃 1.5+j0.5√3 (1.5-j0.5√3)** 0
* El loop a-b es utilizado sin embargo se pueden utilizar los loops b-c y c-a ** Este coeficiente es diferente de cero; sin embargo la secuencia negativa no está presente

B. Anexo: Resultados método factores de distribución de corrientes de fallas
En este anexo se muestran los resultados de aplicar el método de localización por medio
de factores de distribución de falla:
Figura B-1: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla monofásica desde el extremo A
Figura B-2: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla monofásica desde el extremo A

Anexo B. Resultados método factores de distribución de corrientes de fallas 83
Figura B-3: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla monofásica desde el extremo A
Figura B-4: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla bifásica desde el extremo A
Figura B-5: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla bifásica desde el extremo A

84 Sistema para la localización automática de fallas en líneas de transmisión
Figura B-6: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla bifásica desde el extremo A
Figura B-7: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla bifásica a tierra desde el extremo A
Figura B-8: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla bifásica a tierra desde el extremo A

Anexo B. Resultados método factores de distribución de corrientes de fallas 85
Figura B-9: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla bifásica a tierra desde el extremo A
Figura B-10: Método factores de distribución de corrientes de falla con prioridad a las
secuencias positiva y negativa para falla trifásica desde el extremo A
Figura B-11: Método factores de distribución de corrientes de falla con prioridad a la
secuencia positiva para falla trifásica desde el extremo A

86 Sistema para la localización automática de fallas en líneas de transmisión
Figura B-12: Método factores de distribución de corrientes de falla con prioridad a la
secuencia negativa para falla trifásica desde el extremo A

C. Anexo: Redes de Petri desarrolladas
En este anexo se muestran las redes de Petri desarrolladas en este trabajo:
Figura C-1: RP priorización de métodos para fallas bifásicas. CPN Tools

88 Sistema para la localización automática de fallas en líneas de transmisión
Figura C-2: RP priorización de métodos para fallas trifásicas. CPN Tools

Anexo C. Redes de Petri desarrolladas 89
Figura C-3: RP ejecución del método doble fuente desincronizado. CPN Tools
Figura C-4: RP ejecución del método solo corrientes desincronizado. CPN Tools
90 Sistema para la localización automática de fallas en líneas de transmisión
Figura C-5: RP ejecución del método distribución de corriente. CPN Tools
Figura C-6: RP ejecución del método Eriksson. CPN Tools

Anexo C. Redes de Petri desarrolladas 91
Figura C-7: RP ejecución del método distribución de corriente. CPN Tools
Figura C-8: RP ejecución del método reactancia simple. CPN Tools
Bibliografía
[1] XM Los Expertos en Mercados, “Análisis del PIB y demanda de energía en Colombia
en momentos de crisis económica”, 2009.
[2] “The PerUnitLength Parameters for Multiconductor Lines”, en Analysis of
Multiconductor Transmission Lines, IEEE, 2009, pp. 160–239.
[3] S. Kurokawa, J. Pissolato, M. C. Tavares, C. M. Portela, y A. J. Prado, “A new procedure
to derive transmission-line parameters: applications and restrictions”, IEEE Trans.
Power Deliv., vol. 21, núm. 1, pp. 492–498, ene. 2006.
[4] D. Shi, D. J. Tylavsky, N. Logic, y K. M. Koellner, “Identification of short transmission-
line parameters from synchrophasor measurements”, en Power Symposium, 2008. NAPS
’08. 40th North American, 2008, pp. 1–8.
[5] I.-D. Kim y R. K. Aggarwal, “A study on the on-line measurement of transmission line
impedances for improved relaying protection”, Int. J. Electr. Power Energy Syst., vol.
28, núm. 6, pp. 359–366, jul. 2006.
[6] M. Kato, T. Hisakado, H. Takani, H. Umezaki, y K. Sekiguchi, “Live line measurement
of untransposed three phase transmission line parameters for relay settings”, en 2010
IEEE Power and Energy Society General Meeting, 2010, pp. 1–8.
[7] Y. Du y Y. Liao, “Online estimation of power transmission line parameters, temperature
and sag”, en North American Power Symposium (NAPS), 2011, 2011, pp. 1–6.
[8] Y. Liao y M. Kezunovic, “Online Optimal Transmission Line Parameter Estimation for
Relaying Applications”, IEEE Trans. Power Deliv., vol. 24, núm. 1, pp. 96–102, 2009.
[9] R. Das, M. S. Sachdev, y T. S. Sidhu, “A fault locator for radial subtransmission and
distribution lines”, en IEEE Power Engineering Society Summer Meeting, 2000, 2000,
vol. 1, pp. 443–448 vol. 1.
[10] D. A. Tziouvaras, J. B. Roberts, y G. Benmouyal, “New multi-ended fault location
design for two- or three-terminal lines”, en Developments in Power System Protection,
2001, Seventh International Conference on (IEE), 2001, pp. 395–398.
[11] T. Takagi, Y. Yamakoshi, M. Yamaura, R. Kondow, y T. Matsushima,
“Development of a New Type Fault Locator Using the One-Terminal Voltage and
Current Data”, IEEE Trans. Power Appar. Syst., vol. PAS-101, núm. 8, pp. 2892–2898,
1982.
[12] A. A. A. Eisa y K. Ramar, “Accurate one-end fault location for overhead
transmission lines in interconnected power systems”, Int. J. Electr. Power Energy Syst.,
vol. 32, núm. 5, pp. 383–389, jun. 2010.
[13] F. Chunju, D. Xiuhua, L. Shengfang, y Y. Weiyong, “An Adaptive Fault Location
Technique Based on PMU for Transmission Line”, en IEEE Power Engineering Society
General Meeting, 2007, 2007, pp. 1–6.
Bibliografía 93
[14] F. Deng, X. Zeng, Z. Bo, S. Ma, y L. Zhou, “An Improved Network-Based Traveling
Wave Fault Location Method”, en Power and Energy Engineering Conference
(APPEEC), 2011 Asia-Pacific, 2011, pp. 1–4.
[15] R. Schulze, P. Schegner, y P. Stachel, “Parameter identification of unsymmetrical
transmission lines using accurately re-synchronised fault records”, en IEEE Power
Energy Society General Meeting, 2009. PES ’09, 2009, pp. 1–6.
[16] Y. Gong, M. Mynam, A. Guzman, G. Benmouyal, y B. Shulim, “Automated fault
location system for nonhomogeneous transmission networks”, en Protective Relay
Engineers, 2012 65th Annual Conference for, 2012, pp. 374–381.
[17] L. Yinlei, W. Junyong, y S. Honglei, “A novel online fault locating method for
multiple branch complex distribution networks”, en 2012 IEEE Innovative Smart Grid
Technologies - Asia (ISGT Asia), 2012, pp. 1–5.
[18] J. Ma, D. Xu, y Z. Wang, “A Multi-Fault Location Algorithm Based on Wide Area
Information in Complex Large Power Grid”, en Power and Energy Engineering
Conference (APPEEC), 2012 Asia-Pacific, 2012, pp. 1–4.
[19] “IEEE Guide for Determining Fault Location on AC Transmission and Distribution
Lines”, IEEE Std C37114-2014 Revis. IEEE Std C37114-2004, pp. 1–76, ene. 2015.
[20] S. Das, S. Santoso, A. Gaikwad, y M. Patel, “Impedance-based fault location in
transmission networks: theory and application”, IEEE Access, vol. 2, pp. 537–557, 2014.
[21] M. M. Saha, J. Izykowski, y E. Rosolowski, Fault Location on Power Networks.
[electronic resource]. London : Springer London, 2010., 2010.
[22] A. Chamorro, Protecciones de distancia, Guía de aplicación. 28830 San Fernando
de Henares (Madrid). España: Areva T&D Ibérica, 2005.
[23] L. Eriksson, M. M. Saha, y G. D. Rockefeller, “An Accurate Fault Locator With
Compensation For Apparent Reactance In The Fault Resistance Resulting From
Remore-End Infeed”, IEEE Trans. Power Appar. Syst., vol. PAS-104, núm. 2, pp. 423–
436, feb. 1985.
[24] D. Novosel, D. Hart, Y. Hu, y J. Myllymaki, “System for locating faults and
estimating fault resistance in distribution networks with tapped loads”, US5839093 A.
[25] D. Novosel, D. G. Hart, E. Udren, y J. Garitty, “Unsynchronized two-terminal fault
location estimation”, IEEE Trans. Power Deliv., vol. 11, núm. 1, pp. 130–138, ene.
1996.
[26] M. Ceraolo, Converter.exe. Pisa: Universidad de Pisa, 2000.
[27] “IEEE Standard Common Format for Transient Data Exchange (COMTRADE) for
Power Systems”, IEEE Std C37111-1999, pp. 1–55, oct. 1999.
[28] J. A. Calderón Serna, “Modelo adaptativo de inteligencia artificial para el
diagnóstico de fallas a partir de registros de osciloperturbografía”, Universidad Nacional
de Colombia, Medellín, 2007.
[29] R. Zurawski y M. Zhou, “Petri nets and industrial applications: A tutorial”, IEEE
Trans. Ind. Electron., vol. 41, núm. 6, pp. 567–583, dic. 1994.
[30] “Download << CPN Tools Homepage”. [En línea]. Disponible en:
http://cpntools.org/download. [Consultado: 21-nov-2016].
[31] M. Torres, Aplicaciones VBA con Excel, Primera. Lima, Perú: Macro, 2015.
[32] C. Oceda, Excel for Masters. Lima, Perú: Macro, 2015.