sistema difuso y sus propiedades
DESCRIPTION
Variable Lingüística y Reglas Difusas If-ThenTRANSCRIPT
3.1.1 De Variables Numéricas a Variables Lingüísticas.
3.1.2 Hedges Lingüístico.
3.1 Variable Lingüística y Reglas Difusas If-Then
Unidad 3Unidad 3SISTEMA DIFUSO Y SUS SISTEMA DIFUSO Y SUS
PROPIEDADESPROPIEDADES
3.1.1 De variables numéricas a 3.1.1 De variables numéricas a variables lingüísticasvariables lingüísticas
Generalmente en la vida cotidiana, las palabras frecuentemente son utilizadas para describir variables.
Por ejemplo: “Hoy hace calor”, o equivalentemente “la temperatura es alta hoy”, se utiliza la palabra “alta” para describir la variables “temperatura hoy”.
Esto es, la variable “temperatura hoy” toma la palabra “alta” como su valor.
También, la variable “temperatura hoy” puede tomar números como sus valores: 25°C, 19°C, etc.
Cuando una variable toma palabras en lenguaje natural como sus valores, es llamada “variable lingüística”.
Definición 3.1:Definición 3.1:
Si una variable puede tomar palabras en lenguaje natural como sus valores, se denomina una variable lingüística, donde las palabras son caracterizadas por conjuntos difusos definidos en el universo de discurso en el cual la variable es definida.
Ejemplo 3.1Ejemplo 3.1
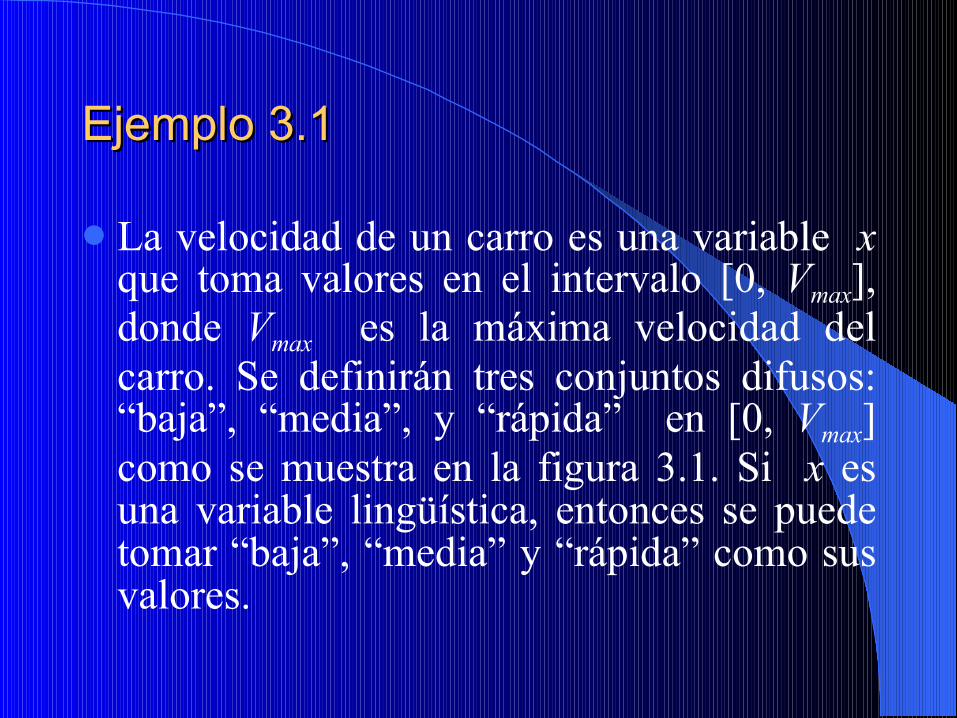
La velocidad de un carro es una variable xque toma valores en el intervalo [0, Vmax], donde Vmax es la máxima velocidad del carro. Se definirán tres conjuntos difusos: “baja”, “media”, y “rápida” en [0, Vmax] como se muestra en la figura 3.1. Si x es una variable lingüística, entonces se puede tomar “baja”, “media” y “rápida” como sus valores.

Por lo que, se puede decir que “x es pequeña”, “x es mediana”, y “x es rápida”. Por su puesto, x también puede tomar números en el intervalo [0, Vmax] como sus valores, por ejemplo, x = 50 mph, 35 mph, etc.
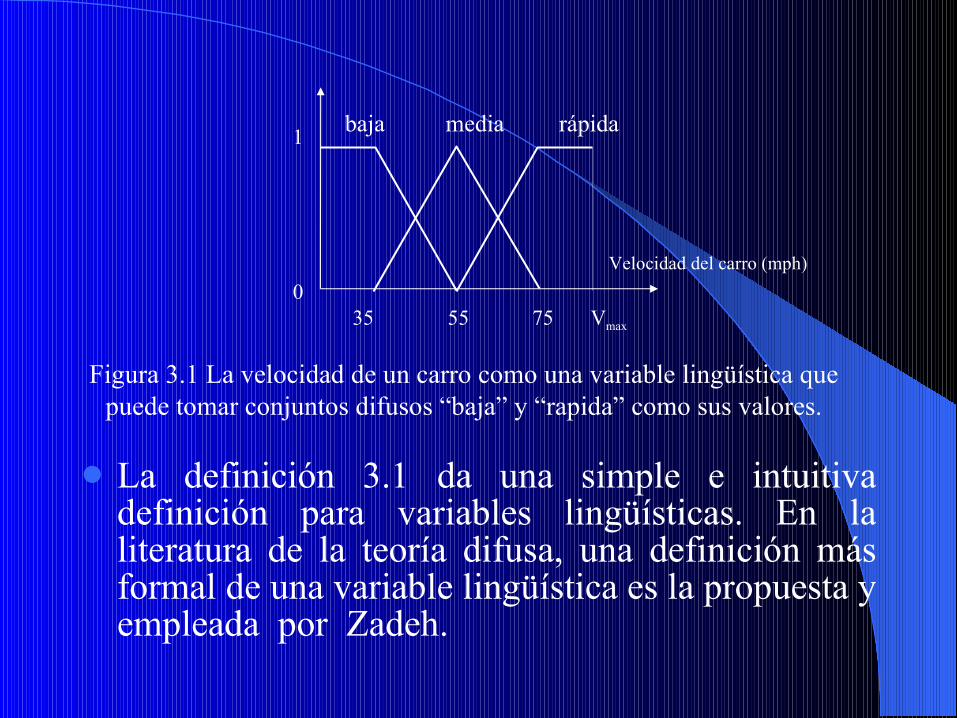
La definición 3.1 da una simple e intuitiva definición para variables lingüísticas. En la literatura de la teoría difusa, una definición más formal de una variable lingüística es la propuesta y empleada por Zadeh.
1
035 55 75 Vmax
baja media rápida
Velocidad del carro (mph)
Figura 3.1 La velocidad de un carro como una variable lingüística que puede tomar conjuntos difusos “baja” y “rapida” como sus valores.
Definición 3.2:Definición 3.2: Una variable lingüística es caracterizada por
(X, T, U, M) donde: X es el nombre de la variable lingüística; en el
ejemplo 3.1, X es la velocidad del carro. T es el conjunto de valores lingüísticos que X puede
tomar; en el ejemplo 3.1, T = {baja, media, rápida}. U es el dominio físico actual en el cual la variable
lingüística X toma sus valores cuantitativos (crisp); en el ejemplo 3.1, U = [0, Vmax].
M es una regla semántica que relaciona cada valor lingüístico en T con un conjunto difuso en U; en el ejemplo 3.1, M relaciona “baja”, “media”, “rapida” con las funciones de membresía mostradas en la Fig. 3.1.
De las dos definiciones anteriores se puede ver que las variables lingüísticas son extensiones de variables numéricas en el sentido de que pueden tomar los conjuntos difusos como sus valores, como se muestra en la Fig. 3.2.
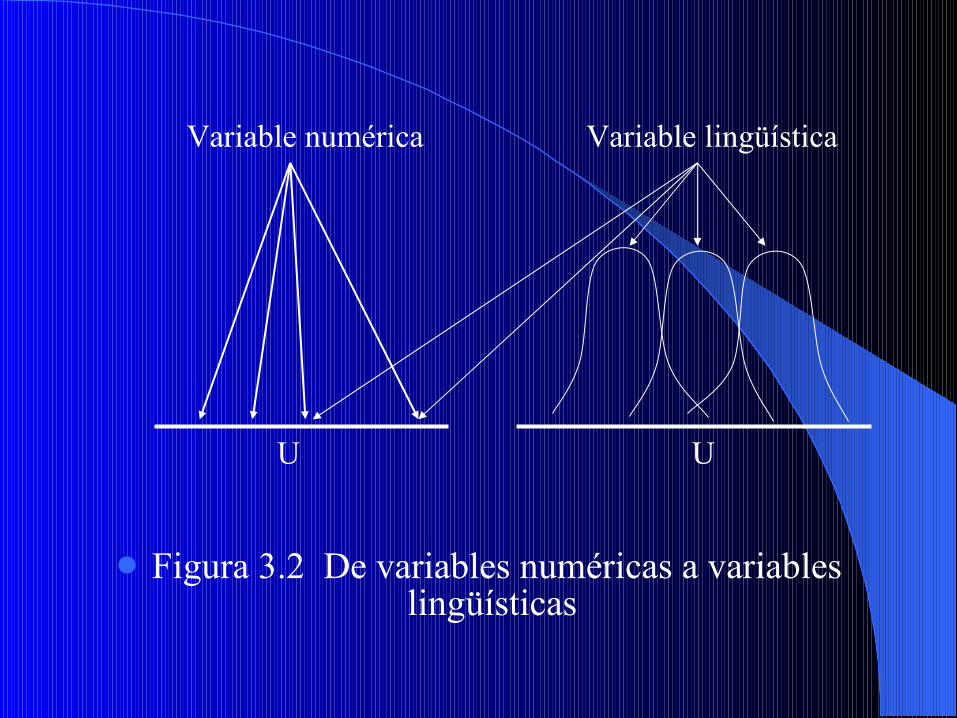
Figura 3.2 De variables numéricas a variables lingüísticas
U U
Variable numérica Variable lingüística
¿Porqué es importante el concepto ¿Porqué es importante el concepto de variable lingüística?de variable lingüística?
Por que las variables lingüísticas son los elementos más fundamentales en la representación del conocimiento humano.
Por ejemplo, cuando se utiliza una pistola radar para medir la velocidad de los carros ésta entrega números como, 39mph, 42mph, etc.; cuando se le pregunta a una persona que diga cual es la velocidad de un carro, el/ella con frecuencia dice en palabras algo como “es rápida”, “es baja”, etc.
Por lo tanto, al introducir el concepto de variable lingüística, se pueden formular descriptores vagos en lenguaje natural en términos matemáticos precisos.
Variables Lingüísticas Y Otras Variables Lingüísticas Y Otras Terminologías RelacionadasTerminologías Relacionadas
La Variable Lingüística (VL) juega un papel importante en muchas aplicaciones, especialmente en:– Sistemas Expertos Difusos, y– Control Lógico Difuso.
Básicamente, una VL es una variable cuyos valores son palabras u oraciones en un lenguaje natural o artificial.
Variable DifusaVariable Difusa
Una Variable Difusa esta caracterizada por tres partes (X, U, R(X)), donde:
X es el nombre de la variable,U es el universo de discurso, yR(X) es un subconjunto difuso de U, el cual representa una restricción
difusa impuesta a X.
Ejemplo 3.2:Ejemplo 3.2:
X = “Viejo” con U = {10, 20,...,80}, y
R(X) = 0.1/20+0.2/30+0.3/40+0.4/50+ 0.8/60+1.0/70+1.0/80, es una restricción difusa de Viejo.

Variable Lingüística Variable Lingüística
La VL es una variable de orden mayor que una variable difusa, y toma variables difusas como sus valores.
Una VL se caracteriza por una quíntupla (x, T(x), U, G, M), donde:
Variable LingüísticaVariable Lingüística
x es el nombre de la variable;
T(x) es el conjunto termino de x, esto es el conjunto de nombres de valores lingüísticos de x donde cada valor es una variables difusa definida sobre U;
Variable LingüísticaVariable Lingüística
G es una regla sintáctica que genera los nombres de los valores de x;
y M es una regla semántica para asociar cada valor de x con sus significados.
Ejemplo 3.3:Ejemplo 3.3:
Si velocidad se interpreta como una VL con U =[0,100], o sea, x=“velocidad”, Entonces su conjunto termino T(velocidad) puede ser:
T(velocidad) = {Muy Lento, Lento, Moderado, Rápido, ...}.
......
La regla sintáctica G para generar los nombres (o las etiquetas) de los elementos en T(velocidad) es completamente intuitiva.
La regla semántica M puede ser definida como:
......
M(Lento) = el conjunto difuso para “una velocidad abajo cercana a 40 mph” con una función de membresía µLento .
M(Moderado) = el conjunto difuso para “una velocidad cercana a 55 mph” con una función de membresía µModerado .
......
M(Rápido) = el conjunto difuso para “una velocidad arriba de 70 mph” con una función de membresía µRápido .
Estos términos pueden ser caracterizados por los conjuntos difusos cuyas funciones de membresía son mostradas en la siguiente figura:
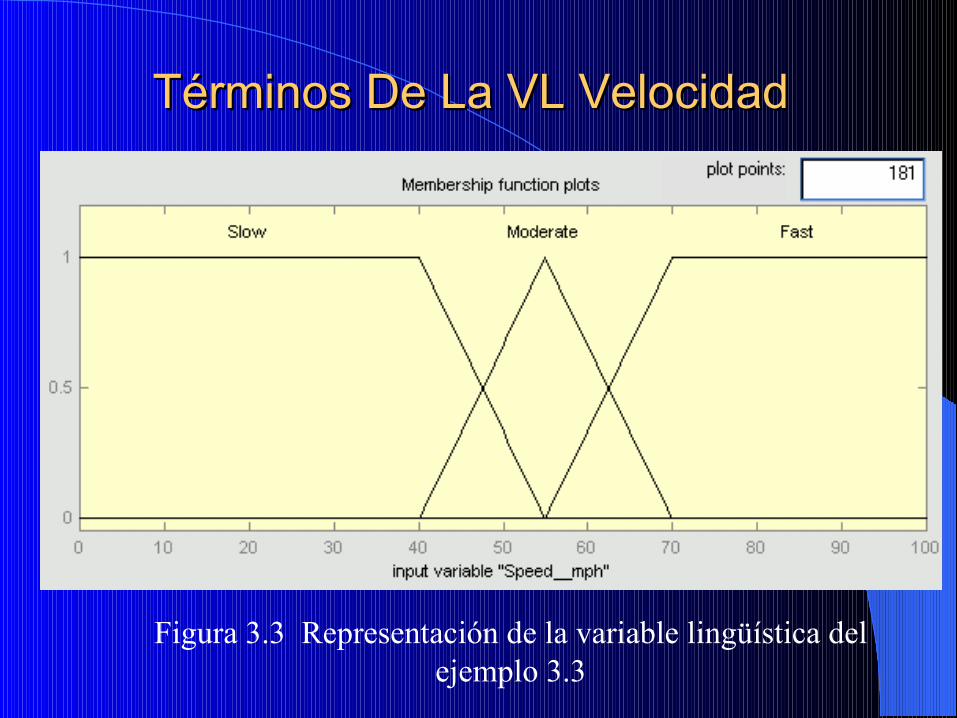
Términos De La VL VelocidadTérminos De La VL Velocidad
Figura 3.3 Representación de la variable lingüística del ejemplo 3.3
Variable LingüísticaVariable Lingüística
En el anterior ejemplo, el conjunto termino solamente contiene un numero pequeño de términos, y así es en la practica la lista de términos de los elementos de T(x), la cual realiza una asociación directa entre cada elemento y su significado M .
Variable LingüísticaVariable Lingüística
Una VL x se dice que es estructurada si su conjunto termino T(x) y su regla semántica M se pueden caracterizar vía un algoritmo, de tal forma que pueden ser vistas como un procedimiento para generar los elementos T(x) y calcular el significado de cada termino T(x).
3.1.2 Hedges Lingüísticos3.1.2 Hedges Lingüísticos Con el concepto de variable lingüística, se
puede tomar palabras como valores de variables (lingüísticas). En la vida diaria, frecuentemente se utiliza más de una palabra para describir una variable. Por ejemplo: si se tiene la velocidad de un carro como una variable lingüística, entonces sus valores deberían ser “no lenta”, “muy lenta”, escasamente rápida”, más o menos media”, etc.
En general, el valor de una variable lingüística es un término compuesto x = x1
x2 ...xn lo cual es un a concatenación de un término atómico x1, x2, ..., xn. Este término atómico puede ser clasificado en tres grupos:
Términos Primarios, los cuales son etiquetas de conjuntos difusos, en el ejemplo 3.1 eran “baja”, “media” y “rápida”.
Complemento “no” y las conectivas “y” y “o”. Hedges, tales como “very”, “slightly”, “more or
less”, etc.
Modificadores Lingüísticos Modificadores Lingüísticos ((hL)hL)
Por lo tanto, hL es un operador para modificar el significado de un conjunto difuso A para crear un nuevo conjunto difuso h(A) .
Ejemplo:“Muy Joven”, “Muy” es un hL.
Operaciones en Conjuntos Operaciones en Conjuntos DifusosDifusos
Las siguientes operaciones en conjuntos difusos son utilizadas en la definición de un hL: Concentración: CON(A); si A es un conjunto difuso en U, entonces very A se define como un conjunto difuso en U con la función de membresía:
( )( )[ ] )1.3()()(
)(
2
2
)(
uu
uu
AAvery
ACON A
µµ
µµ
=
=
Operaciones en Conjuntos Operaciones en Conjuntos DifusosDifusos
Y “more or less A” es un conjunto difuso en U con la función de membresía:
Dilatación: DIL(A)( )[ ] )2.3()( 2/1uu AAlessormere µµ =
( )( ) 2/1)()(
uu ADIL Aµµ =

Ejemplo 3.4Ejemplo 3.4
Si U = {1, 2, ..., 5} y el conjunto difuso “pequeño” se define como:
Pequeño =1/1 +0.8/2 + 0.6/3 +0.4/4 + 0.2/5
Entonces utilizando las Ecs. (3.1) y (3.2) se tiene que:
Muy pequeña = 1/1 +0.64/2 + 0.36/3 + 0.16/4 + 0.04/5 Muy muy pequeña = 1/1 + 0.4096/2 + 0.1296/3 +
0.0256/4 + 0.0016/5 Más o menos pequeña = 1/1 + 0.8944/2 + 0.7746/3 +
0.6325/4 + 0.4472/5
Operaciones en Conjuntos Operaciones en Conjuntos DifusosDifusos
Otras operaciones son: Intensificación: INT(A)
( )( ) ( ) [ ]( )( )
)3.3(,121
5.0,0,2)(
2
2
)(
−−
∈=
formaotradeu
uuu
A
AAINT A µ
µµµ
Algunos Algunos hLhL
VERY(A) = CON(A) = A2, HIGHLY(A) = A3, FAIRLY (MORE OR LESS) = DIL(A) = A1/2, ROUGHLY(A) = DIL[DIL(A)], PLUS(A) = A1.25, MINUS(A) = A0.75,

Algunos Algunos hLhL
RATHER(A) = INT[CON(A)] AND NOT[CON(A)],
SLIGHTLY(A) = INT[PLUS(A) AND NOT VERY(A)],
SORT OF(A) = INT[DIL(A)] AND INT[DIL(NOT(A))],
PRETTY(A) = INT(A) AND NOT[INT(CON(A))],
Los conjuntos difusos resultantes deberían ser normalizados si el modificador (hL) no es igual a 1.
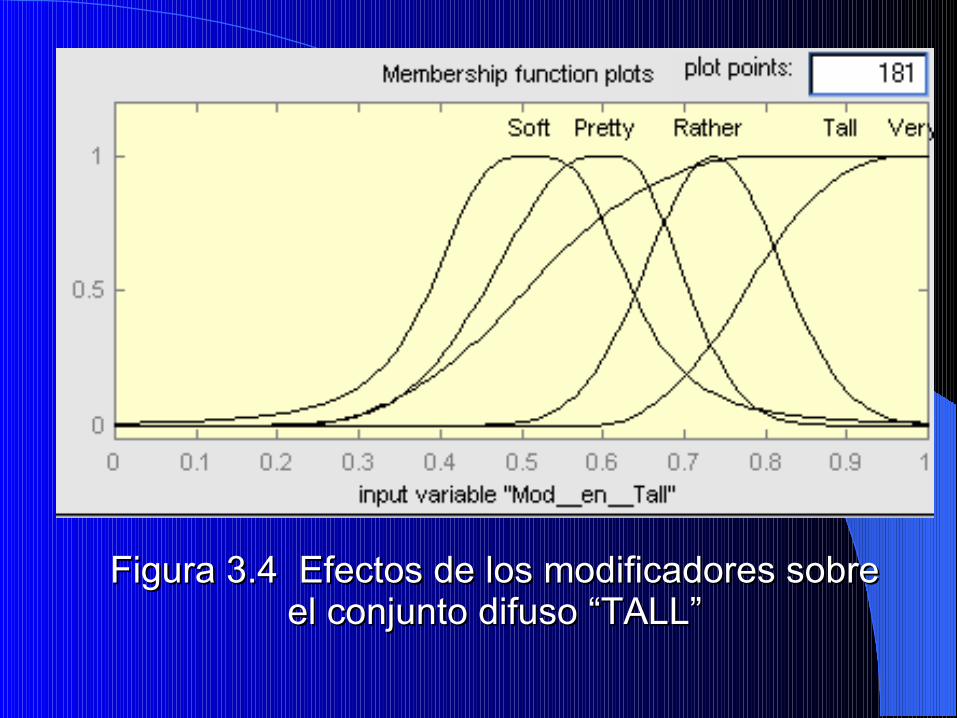
Figura 3.4 Efectos de los modificadores sobre Figura 3.4 Efectos de los modificadores sobre el conjunto difuso “TALL”el conjunto difuso “TALL”
Modificadores LingüísticosModificadores Lingüísticos
Con la ayuda de los hL, se puede definir un conjunto término de una VL, por ejemplo:
T(edad) = {Viejo, MUY Viejo, MUY MUY Viejo,...},
En el cual a “Viejo” se le conoce como Término Primario
Y la regla sintáctica correspondiente G, la cual puede generar recursivamente el conjunto término T(edad), puede ser el siguiente algoritmo recursivo:
Ti+1 = {Viejo}∪{MUY Ti}, i=0, 1, 2,...,Donde T0=∅, Por ejemplo, for i= 0,1,2,3 se tienen:
T0 = ∅,T1 = {Viejo},T2 = {Viejo, MUY Viejo},T3 = {Viejo, MUY Viejo, MUY MUY Viejo}.
Además, la regla semántica M que puede asociar a cada Ti un significado puede ser el siguiente algoritmo recursivo:
M(Ti+1) = M(T i) ∪ Viejoi+1 , i=1,2,3,...
Considerando las dos expresiones anteriores, “Edad” se considera una variable lingüística estructurada.
Ejemplo : Variables Lingüísticas Y Ejemplo : Variables Lingüísticas Y Valores Lingüísticos.Valores Lingüísticos.
Si edad es interpretada como una variable lingüística, entonces su conjunto término T(edad) puede ser:
( )
=
,
,,,,,,
,,,
,,,,,
viejomuynoyjovenmuyno
viejomuynoviejomenosomasviejomuyviejonoviejo
viejomedionoviejomedio
jovenmuynojovenmuyjovennojoven
edadT
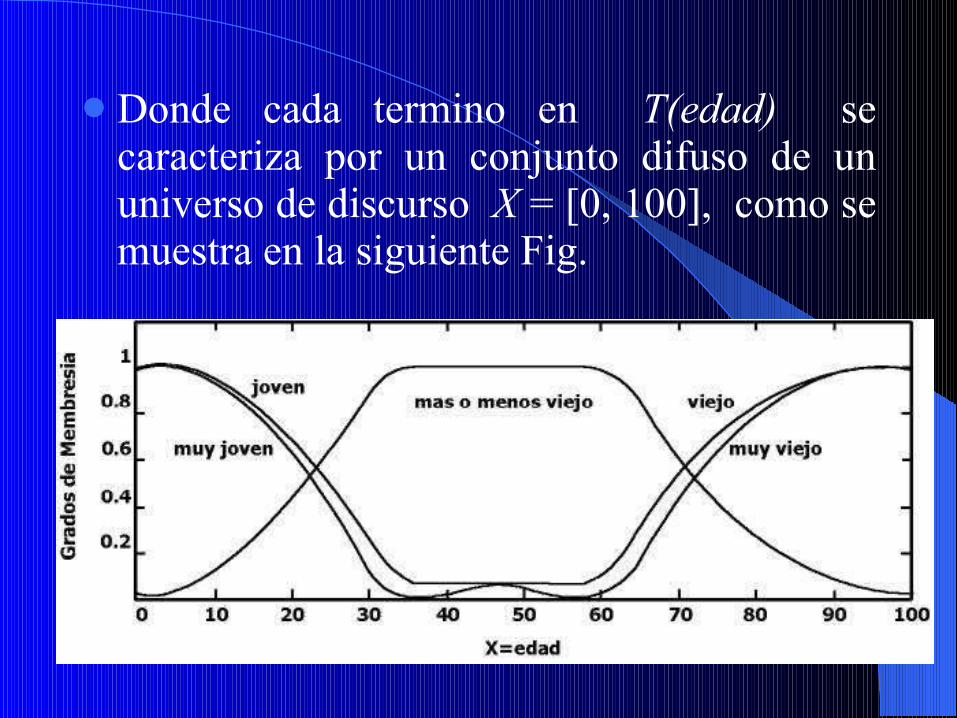
Donde cada termino en T(edad) se caracteriza por un conjunto difuso de un universo de discurso X = [0, 100], como se muestra en la siguiente Fig.
Del ejemplo anterior, se observa que el conjunto termino consiste de varios términos primarios (joven, viejo) modificados por la negación ("no") y/o los adverbios (muy, mas o menos, completamente, extremadamente, etc.), y entonces ligados por conectivas tales como “y”, “o”, y “ni”.
Universo De Discurso Universo De Discurso
Establecimiento Del Universo De Discurso Para Las Variables
Lingüísticas
Se especifica el universo de discurso para una variable de entrada y/o salida, cómo el rango de valores posibles que puede tomar la variable en cuestión para la aplicación actual.
Dado que el universo de discurso para cada variable debe ser trasladado a variables lingüísticas (conjuntos difusos (CD)), se ha tratado de normalizar que el número de conjuntos difusos definido para cada variable sea un número impar, recomendando que se inicie especificando 7 conjuntos para cada variable.
La determinación final del número de conjuntos difusos definidos para cada variable se determina heurísticamente, pues aún cuando se conocen los efectos de tener pocos o muchos conjuntos definidos en el universo, finalmente se establecen los conjuntos definitivos observando un funcionamiento satisfactorio del sistema.
Se recomienda especificar una cantidad de conjuntos difusos más densa en aquellas zonas donde se requieran cambios grandes en los parámetros de salida del sistema a cambios pequeños de sus parámetros de entrada.

Una de las cualidades que caracterizan a los sistemas difusos es el manejo de información ambigua, esta característica la adquieren debido a la forma en que se especifican los conjuntos difusos cubriendo el universo de discurso de las variables de entrada y/o salida, por lo que la ambigüedad que puede ser admitida por el sistema depende del grado de traslape entre los conjuntos definidos.
Respecto del grado de traslape que deben tener dos conjuntos contiguos, se recomienda en 25% del área total al inicio del desarrollo (conjuntos simétricos), aún cuando se sabe que el funcionamiento del sistema no es muy bueno con estos conjuntos, también se recuerda que esto no es una generalización, pues su adecuación depende del grado de precisión deseado en la respuesta del sistema.
ConsideracionesConsideraciones para para la la especificación de los especificación de los CD´sCD´s::
1) Cada punto en el universo de discurso debe pertenecer al dominio de al menos una función de membresía; al mismo tiempo, debe pertenecer al dominio de no más de dos funciones de membresía.
2) Ningún par de funciones de membresía deben tener el mismo punto de máxima membresía.
CCconsideraciones consideraciones para para la la especificación de los especificación de los CD´sCD´s::
3) Cuando dos funciones de membresía se traslapan, la suma de los grados de membresía para cualquier punto en el traslape debe ser menor o igual a uno.
4) Cuando dos funciones de membresía se traslapan, el traslape no debe cruzar el punto de máxima membresía de cualquier función de membresía.
Durante la especificación de los conjuntos difusos que cubren los extremos inferior (función Z) y superior (función S) del universo de discurso considerado, es de gran importancia que se hagan de una manera adecuada, ya que estas funciones son muy importantes para la estabilidad del funcionamiento del sistema, pues evalúan las situaciones extremas consideradas para el establecimiento del universo de discurso.
3.1.3 Fundamentos de Reglas Difusas.
3.1.4 Dos Tipos de Reglas Difusas.
3.1 Variable Lingüística y Reglas Difusas If-Then
Unidad 3Unidad 3SISTEMA DIFUSO Y SUS SISTEMA DIFUSO Y SUS
PROPIEDADESPROPIEDADES
3.1.3.1.33 Fundamentos de Reglas Fundamentos de Reglas Difusas.Difusas.
Una regla difusa if-then es un esquema de representación de conocimiento para capturar el conocimiento (generalmente conocimiento humano) que es impreciso e inexacto por naturaleza.
Esto se logra al utilizar las variables lingüísticas para describir condiciones elásticas (condiciones que pueden ser satisfechas por un grado) en la parte “if” de la regla difusa.
La característica principal de la inferencia difusa basada en reglas es su capacidad para ejecutar inferencia bajo una combinación (matching) parcial.
Esto es, se calcula el grado del dato de entrada al combinar las condiciones de una regla. La Fig. 3.5 ilustra una forma de calcular el grado de combinación entre una entrada difusa A’ y una condición difusa A:
( ) ( )( ) )4.3(,minsup)',(deg ' xxAAreematching AAx
µµ=
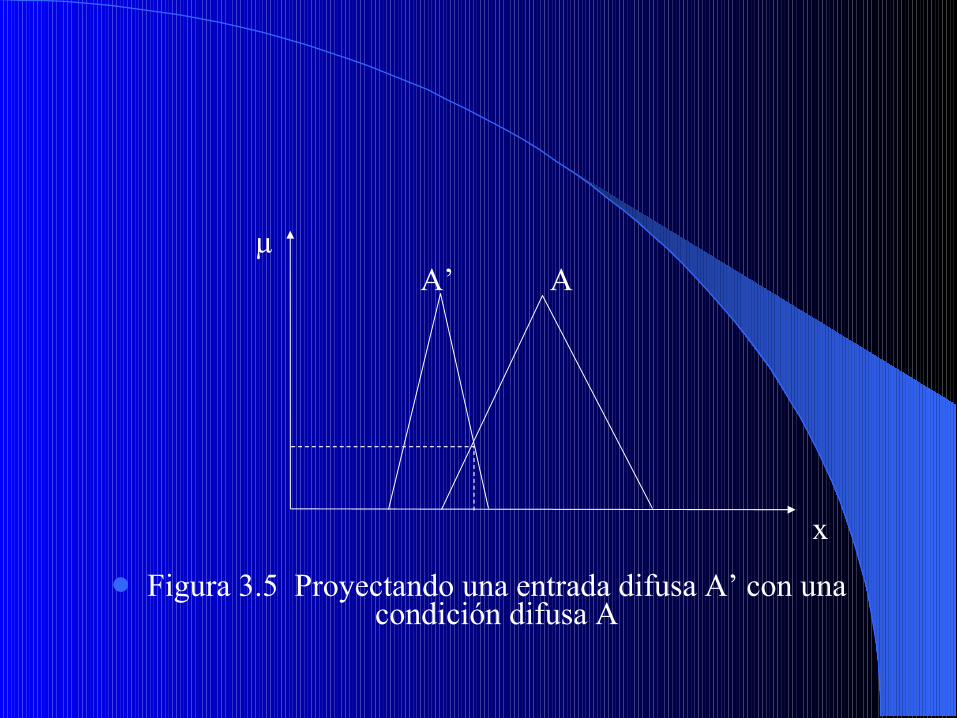
Figura 3.5 Proyectando una entrada difusa A’ con una condición difusa A
µ
x
A’ A
El grado de combinación (matching degree) es combinado con el consecuente (la parte “then”) de una regla para formar una conclusión inferida por la regla difusa.
A mayor grado de combinación, más cercana la conclusión inferida al consecuente de la regla.
Las palabras juegan un papel importante en los sistemas basados en regla. La condición elástica y el consecuente de una regla difusa frecuentemente son descritas con palabras (etiquetas lingüísticas) cuyos significados son imprecisos.
Dichas palabras facilitan la extracción y la documentación del conocimiento humano en una forma fácil y explicita, especialmente los que son imprecisos por naturaleza.
Las “palabras” en las reglas difusas difieren de los
símbolos en las reglas clásicas de la inteligencia artificial (AI) –el significado de los simbolos para una variable numérica frecuentemente es descrito utilizando intervalos, mientras que el significado de las palabras en una regla difusa es caracterizado mediante funciones de membresía que suavisan las fronteras estrictas de los intervalos.
3.1.4 Dos Tipos de Reglas 3.1.4 Dos Tipos de Reglas DifusasDifusas
Existen dos tipos de reglas difusas: 1) reglas de proyección difusa, y 2) reglas de implicación difusa.
Una regla de proyección difusa describe una relación de proyección funcional entre las entradas y una salida utilizando términos lingüísticos, mientras una regla de implicación difusa describe una relación de implicación lógica generalizada entre dos formulas lógicas que involucran variables lingüísticas y términos lingüísticos imprecisos.
El fundamento de una regla de proyección difusa es una grafica difusa, mientras que la base de una regla de implicación difusa es en el sentido limitado de la lógica difusa (no general; referido a una generalización de los sistemas lógicos clásicos de dos-valores).
Los dos tipos de reglas difusas también están relacionados a diferentes disciplinas.
Las reglas de proyección difusa son relacionadas a otras técnicas de aproximación de funciones en sistemas de identificación y redes neuronales artificiales, mientras que las reglas de implicación difusa son relacionadas a la lógica clásica de dos-valores y a la lógica multivaluada.
Material Anexo a 3.1.3 Fundamentos de
Reglas Difusas.
Unidad 3Unidad 3SISTEMA DIFUSO Y SUS SISTEMA DIFUSO Y SUS
PROPIEDADESPROPIEDADES
Lógica Difusa Y Razonamiento Aproximado

3.1.4.1 Reglas de Proyección 3.1.4.1 Reglas de Proyección DifusaDifusa
En muchos problemas del mundo real, se busca la relación funcional entre un conjunto de parámetros observables y uno o varios parámetros cuyos valores se desconocen.
Los controladores lógicos difusos utilizan reglas que aproximan una proyección (típicamente no lineal) desde el estado observado a una acción de control deseada. De hecho, la mayoría de las aplicaciones industriales de lógica difusa utilizan reglas de proyección difusa.
Cuando se quiere aproximar una función, una regla difusa puede aproximar un segmento pequeño de la función, la función entera es aproximada por un conjunto de reglas de proyección difusas. A la colección de reglas de proyección difusa se le conoce como modelo basado en reglas difusas o simplemente modelo difuso.
La diferencia principal entre las reglas difusas y las reglas no difusas para la aproximación de una función cae en sus capacidades de “razonamiento interpolativo”, el cual permite que la salida de una regla difusa multiple sea unificada para una entrada dada. El concepto de razonamiento interpolativo se puede ver como un tipo de modelado basado en particiones en sistemas de identificación.
Las técnicas para la aproximación de una función puede ser clasificadas en tres categorías: técnicas globales, técnicas de super-imposición, y técnicas basadas en partición.
La aproximación de una función basada en reglas difusas es una técnica basada en partición. Generaliza la partición clásica al permitir una subregión de traslape parcial con las subregiones vecinas. Se referirá a ésta como una partición difusa. En la región donde se traslapan las subregiones parcialmente la una con la otra, la función es aproximada utilizando un tipo de técnica de interpolación.
3.1.4.2 Reglas de Implicación 3.1.4.2 Reglas de Implicación DifusasDifusas
Las reglas de implicación difusas son una generalización de la “implicación” en lógica de dos valores.
La inferencia de las implicaciones difusas generaliza dos tipos de inferencia lógica utilizando las implicaciones en lógica clásica: modus ponens y modus tollens. A continuación se ilustrará brevemente estas inferencias lógicas utilizando la siguiente implicación:
IF el IQ de una persona es alto THEN la persona es inteligente.
Dada la implicación y el hecho de que “El IQ de Juan es alto”, el modus ponensposibilita el poder inferir que “Juan es inteligente”.
Por otro lado, si se tiene la implicación y el hecho de que “Juan no es inteligente”, el modus tollens posibilita el poder inferir que “El IQ de Juan no es alto”.
Limitaciones en la Lógica ClásicaLimitaciones en la Lógica Clásica Si bien, en la lógica clásica se pueden ejecutar los
dos tipos de inferencia mencionados, ellos están limitados en dos formas. Primero, dichas inferencias insisten en combinaciones perfectas. Si el IQ de Juan es mas o menos alto, por ejemplo, no se puede llevar a cabo la inferencia con el modus ponens de la implicación planteada debido a que “mas o menos inteligente” no es identico a “inteligente”. Sin embargo, nuestro sentido “comun de razonamiento” generalmente sugiere que se puede inferir que “Juan es mas o menos inteligente”.
Segundo, dichas inferencias no pueden manejar la incertidumbre. Por ejemplo, si Juan dice que su IQ es alto pero no puede presentar algún documento que avale su afirmación, se tendría algo de incertidumbre acerca de su afirmación. Sin embargo, bajo tales circunstancias, la lógica no puede razonar a cerca de la incertidumbre.
Esquema de Razonamiento de L. A. Esquema de Razonamiento de L. A. Zadeh:Zadeh:
Las limitaciones que presenta la lógica clásica motivaron a L. A. Zadeh a desarrollar un esquema de razonamiento que generaliza la lógica clásica, tal que:
(1) se pueda dirigir o manejar el razonamiento de “sentido-común” bajo un ajuste parcial, y (2) se pueda razonar acerca del grado de certidumbre de una declaración.
En particular, las implicaciones lógicas son generalizadas para permitir un ajuste o combinación parcial. En el ejemplo, esto significa que se puede inferir que “Juan es algo inteligente” de “el IQ de Juan es algo alto” y la implicación difusa “IF el IQ de Juan es alto, THEN Juan es inteligente”, como se muestra a continuación:
Dado: El IQ de Juan es alto → Juan es inteligente.
El IQ de Juan es algo alto.
Inferencia: Juan es algo inteligente.
La segunda limitación de la lógica clásica (la no habilidad de tratar con la incertidumbre) ha motivado otra extensión de la lógica clásica: la lógica multivaluada.
La lógica difusa difiere de la lógica multivaluada en que también maneja la primera limitación de la lógica clásica (la restricción a un ajuste perfecto).
La razón de que una implicación difusa pueda manejar el primer problema es que utiliza las variables lingüísticas en sus antecedentes (parte IF).
Consecuentemente, la declaración en el antecedente describe una condición elásticaque puede ser satisfecha parcialmente.
En el ejemplo, “El IQ de una persona” es una variable lingüística en el antecedente, y “el IQ de una persona es alto” describe una condición elastica acerca del IQ de una persona.
Lo anterior posibilita a una persona con un IQ algo alto a ajustar parcialmente la condición. Obviamente, el grado para el cual la condición en una implicación difusa es ajustada influye en la inferencia que puede ser hecha de la implicación difusa.
Las distinciones entre las reglas de implicación difusa y las reglas de proyección difusas son sutiles, más sin embargo importante.
El Prof. Zadeh menciona que la lógica difusa tiene cuatro facetas principales:
(1) la faceta lógica, (2) la faceta de teoría de conjuntos, (3) la faceta relacional, (4) la faceta epistemic.
Las reglas de implicación difusa están primariamente en la faceta lógica, mientras que las reglas de proyección difusa están en la faceta relacional por que la proyección funcional es un tipo de relación.
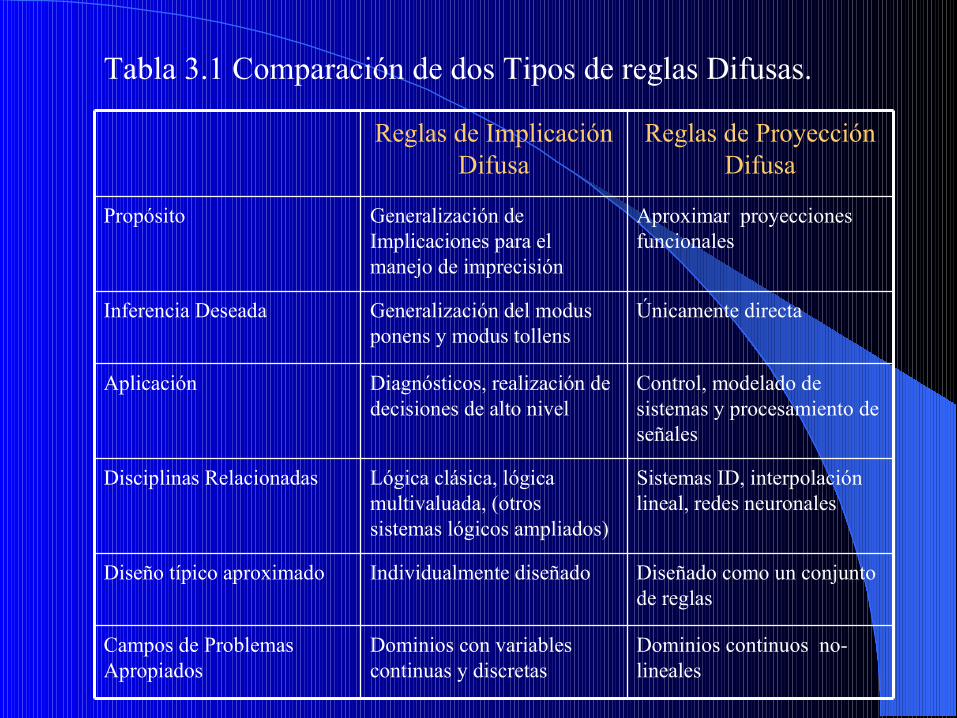
Se resumen algunas de las principales diferencias entre estos dos tipos de reglas difusas en la tabla 3.1.
Dominios continuos no-lineales
Dominios con variables continuas y discretas
Campos de Problemas Apropiados
Diseñado como un conjunto de reglas
Individualmente diseñadoDiseño típico aproximado
Sistemas ID, interpolación lineal, redes neuronales
Lógica clásica, lógica multivaluada, (otros sistemas lógicos ampliados)
Disciplinas Relacionadas
Control, modelado de sistemas y procesamiento de señales
Diagnósticos, realización de decisiones de alto nivel
Aplicación
Únicamente directaGeneralización del modus ponens y modus tollens
Inferencia Deseada
Aproximar proyecciones funcionales
Generalización de Implicaciones para el manejo de imprecisión
Propósito
Reglas de Proyección Difusa
Reglas de Implicación Difusa
Tabla 3.1 Comparación de dos Tipos de reglas Difusas.
Material Anexo a: 3.1.4.2 Reglas de
implicación difusa.
Unidad 3Unidad 3SISTEMA DIFUSO Y SUS SISTEMA DIFUSO Y SUS
PROPIEDADESPROPIEDADES
Implicaciones difusas y el razonamiento aproximado
Modelos Basados en Reglas–DifusasModelos Basados en Reglas–Difusas para Aproximar una Funciónpara Aproximar una Función
Por conveniencia se referirá a un modelo que describa una relación de proyección funcional utilizando un conjunto de reglas de proyección difusas como un modelo difuso basado-en reglas, o simplemente modelo difuso.
Un modelo difuso describe una proyección (función) de un conjunto de variables de entrada a un conjunto de variables de salida.
¿Qué es un modelo difuso?¿Qué es un modelo difuso?
Un modelo difuso es un modelo que se obtiene por la fusión de múltiples modelos locales que son asociados con sub-espacios difusos del espacio de entada dado.
Un sub-escacio difuso es una región cuya frontera permite una transición gradual desde “dentro de la región” hacia “fuera de la región”.
Por lo tanto, generalmente un sub-espacio difuso está parcialmente traslapado con sus vecinos sub-espacios difusos.
Un modelo difuso contiene un conjunto de sub-espacios difusos que forman una descomposición difusa (también llamada partición difusa) del espacio de entrada.
El resultado de la fusión de múltiples modelos difusos generalmente es una conclusión difusa, la cual es convertida a una salida crisp final a través de un proceso de defusificación.
Por todo lo anterior, los cuatro conceptos principales en los modelos difusos basados en reglas son: (1) Partición difusa, (2) proyección de sub-regiones difusas a modelos locales, (3) fusión de múltiples modelos locales, (4) defusificación.

Material Anexo a: Modelos Basados en
Reglas–Difusas para Aproximar una Función
Unidad 3Unidad 3SISTEMA DIFUSO Y SUS SISTEMA DIFUSO Y SUS
PROPIEDADESPROPIEDADES
ESTRUCTURA BÁSICA Y ESTRUCTURA BÁSICA Y OPERACIÓN DE LOS SISTEMAS DE OPERACIÓN DE LOS SISTEMAS DE
CONTROL LÓGICOS DIFUSOSCONTROL LÓGICOS DIFUSOS
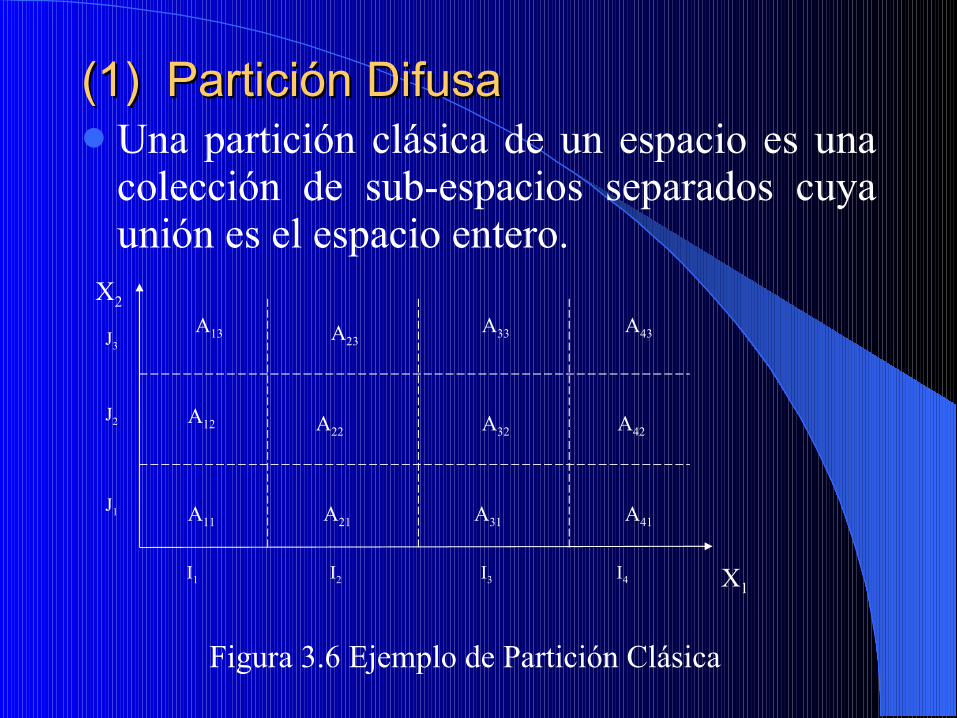
(1) Partición Difusa(1) Partición Difusa Una partición clásica de un espacio es una
colección de sub-espacios separados cuya unión es el espacio entero.
X2
X1I1 I3 I2 I4
J1
J2
J3
A11
A12
A21 A31
A22 A32 A42
A41
A13 A23 A33 A43
Figura 3.6 Ejemplo de Partición Clásica
En la Fig. 3.6 se ejemplifica la partición clásica para un espacio de entrada, el cual toma en cuanta dos variables X1 y X2 .
La partición se construye al dividir primeramente el eje X1 en cuatro intervalos, y después el rango X2 en tres intervalos. En cada par de intervalos Ik y Jl se especifica un sub-espacio Akl que puede ser descrito como: X1 ε Ik y X2 ε Jl .
Una partición difusa generaliza la partición clásica de tal forma que la transición entre un sub-espacio y otro vecino es suave.
Como se vera después, esta generalización posibilita lo que se conoce como: el razonamiento interpolativo en los modelos difusos.
La Fig. 3.7 muestra una partición difusa para un sistema que controla el contraste de una TV basada en dos entradas: (1) la distancia entre la persona y la TV, y (2) la iluminación en el cuarto.
La distancia entre la persona y la TV se denota por d, y es clasificada por tres conjuntos difusos: cerca, medio, y lejos.
La brillantes en el cuarto se denota por b, y es clasificada por dos conjunto difusos: claro y oscuro.
La partición difusa del espacio de entrada completo está formado por seis sub-regiones difusas especificadas por parejas de conjuntos difusos, (una para cada variable). La Fig. 3.7 muestra dos de las seis sub-regiones difusas:
d es medio y b es oscuro. d es lejos y b es oscuro.
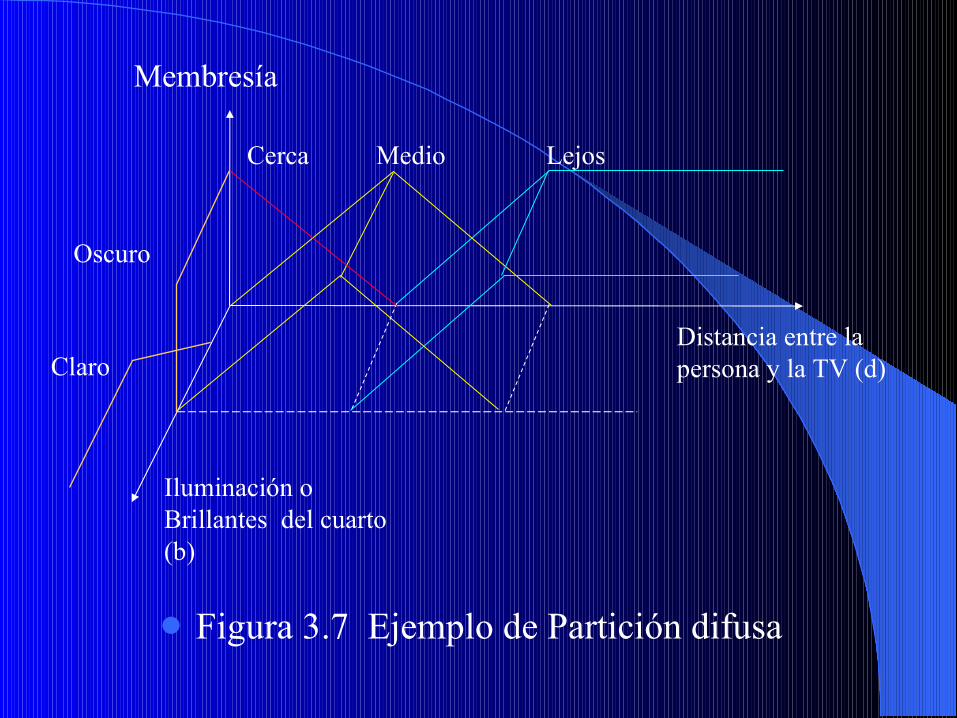
Figura 3.7 Ejemplo de Partición difusa
Cerca Medio Lejos
Claro
Oscuro
Membresía
Iluminación o Brillantes del cuarto (b)
Distancia entre la persona y la TV (d)
Una partición difusa de un espacio es una colección de sub-espacios difusos cuyas fronteras están parcialmente traslapadas y cuya unión es el espacio entero.
Aun que existen diferentes operadores para escoger y realizar la operación de unión en conjuntos difusos, el que es más factible de para definir la partición difusa es el operador de adición.
Así es que, se puede formalmente definir la partición difusa de espacios S como una colección de sub-espacios difusos Ai de S que satisface la siguiente condición:
( ) )5.3(1 SxxiA
∈∀=∑ µ
Esto es, para cualquier elemento de un espacio, su grado de membresía en todo el sub-espacio siempre tendera a 1.
Asumiendo que se utiliza el operador aditivo para calcular la unión, es fácil mostrar que la condición de la Ec. (3.5) es equivalente a:
)6.3(SAii
=∪
Aun que muchos sistemas difusos desarrollados en el mundo real satisfacen la Ec. (3.5), no todos los investigadores en la comunidad de la lógica difusa adoptan dicha definición para la partición difusa.
Una definición más simple de la partición difusa es la que remplaza la condición suma-a-uno de la Ec. (3.5), con la condición que el grado de membresía en todo el subespacio sumará un número más grande que 0, pero no que 1.
Se llamará una colección de subconjuntos difusos Ai de S una colección difusa débil de S si y solo si satisface la siguiente condición:
La condición “más grande que 0” requiere que cada elemento en el espacio S sea cubierto por al menos un subespacio difuso en lo particular.
( ) )7.3(10 SxxiA ∈∀≤< ∑ µ
Intuitivamente, esto significa que una partición difusa no deja ningún “hueco” .
La condición “suma a 1” de una partición difusa puede ser relajada a la condición “suma menor o igual a 1” debido a que el razonamiento interpolativo de un modelo difuso incluye un paso de normalización.
Es obvio que una partición difusa siempre es una partición difusa débil, pero no viceversa.
NOTA:NOTA: Al generalizar la capacidad de
razonamiento interpolativo en la lógica difusa utiliza tanto la “distancia” como el “grado de membresía” (en vez de utilizar solo “el grado de membresía”), los investigadores en lógica difusa han generalizado la notación de la “partición difusa” al quitar la condición “más grande que 0”, por ejemplo:
1)( <∑ xAi i
Esto es porque aun si un elemento x no es cubierto por cualquier subespacio difuso, el razonamiento interpolativo basado en distancia todavía puede ser ejecutado en x al utilizar subespacios en la partición difusa que sean cercanos a x.
Sin embargo, el término “partición difusa”, puede no ser apropiado para describir tales conjunto de un subespacio difuso porque su analogía con la notación convencional de “partición” es muy debil.
Un termino más apropiado puede ser “casos difusos” o “parches difusos”.
Es importante enfatizar que “partición difusa” y “razonamiento interpolativo” son como las dos caras de una moneda.
Al extender una generalmente se extiende la otra. Las dos juntas hacen posible para la lógica difusa aprovechar el compromiso entre el costo y la precisión.
(2) Proyección de un Subespacio (2) Proyección de un Subespacio Difuso a un Modelo LocalDifuso a un Modelo Local
Un modelo local para un subespacio del espacio de entrada total describe la relación de proyección entre las entrada y las salidas del sistema en el subespacio pequeño.
Un modelo global para un espacio de entrada describe la relación entrada-salida del sistema para el espacio de entrada total.
Ya que la amplitud del modelo local es menor que el de un modelo global, generalmente es más fácil desarrollar un modelo local. En particular, un modelo global no-lineal (cuya función de proyección entrada-salida no es lineal) frecuentemente puede ser aproximado por un conjunto de modelos locales lineales.
3.1.5 Fundamentos Teóricos de 3.1.5 Fundamentos Teóricos de Reglas de Proyección DifusaReglas de Proyección Difusa

Lógica Difusa Y Razonamiento Aproximado
Material Anexo a 3.1.3 Fundamentos de Reglas
Difusas.
Lógica DifusaLógica Difusa
La Lógica es una base para el La Lógica es una base para el razonamientorazonamiento. La lógica bivalente . La lógica bivalente clásica trata con clásica trata con proposicionesproposiciones las cuales pueden ser las cuales pueden ser verdaderasverdaderas (valor lógica 1) o (valor lógica 1) o falsasfalsas (valor (valor lógico 0), lo que se conoce como lógico 0), lo que se conoce como valor de verdadvalor de verdad de la proposición. de la proposición.
En general, las proposiciones En general, las proposiciones son oraciones expresadas en son oraciones expresadas en algún lenguaje y pueden ser algún lenguaje y pueden ser representadas en una representadas en una forma forma canónicacanónica::
x es P,x es P,xx es el sujeto y es el sujeto y PP designa el designa el
predicadopredicado el cual caracteriza una el cual caracteriza una propiedad del sujeto.propiedad del sujeto.
Operaciones LógicasOperaciones Lógicas
Las operaciones lógicas son Las operaciones lógicas son funciones (lógicas) de dos funciones (lógicas) de dos proposiciones y son definidas vía proposiciones y son definidas vía Tablas de VerdadTablas de Verdad..
Si se tienen dos proposiciones Si se tienen dos proposiciones AA y y BB, las cuales pueden ser verdaderas , las cuales pueden ser verdaderas o falsas. Entonces se pueden tener o falsas. Entonces se pueden tener cuatro operaciones lógicas básicas cuatro operaciones lógicas básicas que son:que son:
La conjunción (La conjunción (∧∧), “), “AA y y BB”.”.La disyunción (La disyunción (∨∨), “), “AA o o B B”.”.La implicación (o condicional) La implicación (o condicional)
((⇒⇒), “si ), “si AA entonces entonces BB”.”.La equivalencia (o bidireccional) La equivalencia (o bidireccional)
((⇔⇔), “), “AA si y solo si si y solo si BB”.”.
Razonamiento LógicoRazonamiento Lógico
El procedimiento de razonamiento es El procedimiento de razonamiento es realizado a través de algunas realizado a través de algunas reglas reglas de inferencia. de inferencia. Algunas reglas de Algunas reglas de inferencia importantes son:inferencia importantes son:
((AA ∧∧ ( (AA⇒⇒BB))))⇒⇒BB (modus ponens) (modus ponens)((¬¬BB ∧∧ ( (AA⇒⇒BB))))⇒¬⇒¬AA (modus tollens) (modus tollens)((((AA⇒⇒BB))∧∧((BB⇒⇒CC))))⇒⇒((AA⇒⇒CC) (silogismo) (silogismo
hipotético)hipotético)
El resultado de las proposiciones El resultado de las proposiciones anteriores siempre es cierto no anteriores siempre es cierto no importando cuales sean los valores importando cuales sean los valores de verdad de las proposiciones de verdad de las proposiciones AA y y BB..
El El modus ponensmodus ponens se utiliza para el se utiliza para el control difuso; y el control difuso; y el modus tollensmodus tollens se utiliza en sistemas expertos.se utiliza en sistemas expertos.
Generalidades de un sistema Generalidades de un sistema experto difusoexperto difuso
Un sistema experto consiste de Un sistema experto consiste de una base de conocimiento y de una base de conocimiento y de una maquina de inferencia. La una maquina de inferencia. La base de conocimiento puede ser base de conocimiento puede ser descompuesta en una base de descompuesta en una base de datos y una base de reglas. datos y una base de reglas.
La importancia de los sistemas La importancia de los sistemas llamados llamados "sistemas expertos "sistemas expertos difusos"difusos",, radica en sus radica en sus habilidades de poder representar habilidades de poder representar y razonar con imprecisión, lo y razonar con imprecisión, lo cual es inherente a los sistemas cual es inherente a los sistemas expertos.expertos.
Base de conocimiento en la Base de conocimiento en la Lógica Difusa.Lógica Difusa.
Un hecho general en una Un hecho general en una base base de conocimientode conocimiento, especifica el , especifica el valor de algún atributo para valor de algún atributo para algún objeto que tenga la formaalgún objeto que tenga la forma: : X es AX es A, donde , donde XX denota una denota una variable que toma sus valores variable que toma sus valores dentro de algún universo U, y dentro de algún universo U, y AA representa un conjunto difuso representa un conjunto difuso en U.en U.
Un hecho general Un hecho general X es AX es A, es , es transformado en una ecuación de transformado en una ecuación de asignación asignación R (X) = AR (X) = A, lo que , lo que significa que el conjunto difuso significa que el conjunto difuso AA es considerado como una es considerado como una restricción difusa "restricción difusa "R (X)R (X)", sobre ", sobre los valores que la variable los valores que la variable XXpueda tomar.pueda tomar.
En el marco de la teoría de la En el marco de la teoría de la posibilidad un hecho de la forma posibilidad un hecho de la forma X es AX es A, es traducido en una , es traducido en una ecuación de ecuación de asignación de asignación de posibilidadposibilidad::
es la es la posibilidadposibilidad de que X tome el de que X tome el valor u, dada la información de valor u, dada la información de X X es Aes A
AuX
=∏
Una de las ventajas de los Una de las ventajas de los sistemas expertos difusos es que sistemas expertos difusos es que no es necesario un no es necesario un ajusteajusteperfecto perfecto entre los antecedentes entre los antecedentes de las reglas y la información de las reglas y la información dada acerca de una de sus dada acerca de una de sus variables.variables.
Por ejemplo, un hecho podría ser Por ejemplo, un hecho podría ser de la forma de la forma X es A’X es A’, donde , donde A’ A’ es es un subconjunto difuso de U y un subconjunto difuso de U y A’A’≠≠AA..
Entonces, las dos piezas de Entonces, las dos piezas de información dentro de la base de información dentro de la base de conocimientoconocimiento, “X es A, “X es A” y “” y “Si X es Si X es A entonces Y es BA entonces Y es B”, podrían ser ”, podrían ser ligadas por medio de una conectiva ligadas por medio de una conectiva adecuada, para poder obtener adecuada, para poder obtener información acerca de información acerca de YY..
Es así, que a partir de esta Es así, que a partir de esta información se pueden inferir las información se pueden inferir las restricciones sobre restricciones sobre YY, mediante , mediante su proyección en su proyección en BB. Esto . Esto conlleva, a los conlleva, a los modus ponens modus ponens generalizados (MPG)generalizados (MPG)..
Modus Ponens GeneralizadoModus Ponens Generalizado
Los modelos matemáticos en los que Los modelos matemáticos en los que se basa la inferencia difusa, provienen se basa la inferencia difusa, provienen de la lógica proposicional, la cual es de la lógica proposicional, la cual es una área de la lógica tradicional que una área de la lógica tradicional que trata con las condiciones de variables trata con las condiciones de variables lógicas que representan proposiciones lógicas que representan proposiciones y que se extienden hacia la lógica y que se extienden hacia la lógica difusa, a través del uso de difusa, a través del uso de proposiciones que se expresan proposiciones que se expresan mediante un lenguaje sintético.mediante un lenguaje sintético.
Uno de los principales Uno de los principales objetivosobjetivosde la lógica proposicional es el de la lógica proposicional es el estudio de las reglas mediante estudio de las reglas mediante las cuales se pueden producir las cuales se pueden producir nuevas variables lógicas en nuevas variables lógicas en función de otras variables lógicas función de otras variables lógicas dadas.dadas.
Existe una regla básica de Existe una regla básica de implicación difusa, comúnmente implicación difusa, comúnmente utilizada en el razonamiento utilizada en el razonamiento aproximado, llamada aproximado, llamada modus modus ponens generalizadosponens generalizados ( (MPGMPG). ).
El modus ponensEl modus ponens establece establece que, dadas dos proposiciones que, dadas dos proposiciones aa y y aa→→bb llamadas premisas llamadas premisas, , donde “donde “→→“ representa a alguna “ representa a alguna función de implicación o relación función de implicación o relación difusa, difusa, el valor de verdad de el valor de verdad de la proposición la proposición bb o o conclusión puede ser conclusión puede ser inferido.inferido.
Para entender el significado del Para entender el significado del MPG, considérese una MPG, considérese una base de base de hechoshechos y una y una base de reglasbase de reglas que que contengan información contengan información imprecisa. Los hechos pueden imprecisa. Los hechos pueden ser representados de la forma ser representados de la forma ““X es AX es A” (donde ” (donde XX, representa a , representa a una variable o sujeto y una variable o sujeto y AA es un es un conjunto difuso o predicado conjunto difuso o predicado difuso).difuso).
Respecto a las reglas que se utilizan más Respecto a las reglas que se utilizan más comúnmente en los sistemas de control comúnmente en los sistemas de control difusos, generalmente éstas se proponen difusos, generalmente éstas se proponen bajo el siguiente esquema:bajo el siguiente esquema:
SÍ < condición/ones >, ENTONCES <acción/es> (A.1)SÍ < condición/ones >, ENTONCES <acción/es> (A.1)
En un lenguaje natural se tiene:En un lenguaje natural se tiene: Si X es A, entonces Y es BSi X es A, entonces Y es B (A.2)(A.2)
donde:donde:
A y B son conjuntos difusos definidos en los A y B son conjuntos difusos definidos en los universos U y V (ent/sal) respectivamente.universos U y V (ent/sal) respectivamente.
La regla de la ecuación (A.1) es vista La regla de la ecuación (A.1) es vista también como una también como una proposición proposición condicional canónicacondicional canónica, la cual induce , la cual induce una una distribución de posibilidad distribución de posibilidad condicionalcondicional de de YY dada dada XX, denotada , denotada por: por:
( )∏ XY

En la lógica difusa el modus En la lógica difusa el modus ponens se formula mediante la ponens se formula mediante la llamada llamada regla composicional de regla composicional de inferenciainferencia, , la cual permite la cual permite calcular la distribución de calcular la distribución de posibilidad de “posibilidad de “Y es BY es B”, dadas la ”, dadas la distribución condicional de “distribución condicional de “Sí X Sí X es A, entonces Y es Bes A, entonces Y es B” y la de ” y la de “ “X es AX es A”. ”.
Esta regla equivale a la Esta regla equivale a la operación de composición operación de composición realizada mediante:realizada mediante:
La formulación más general de reglas La formulación más general de reglas se simboliza mediante el esquema se simboliza mediante el esquema de de Modus ponensModus ponens. .
( ) ( ) ( ){ } Vvvuuminv RAUu
AR ∈∀=∈
,,sup µµµ
Lógica Difusa Y Razonamiento Aproximado
Material Anexo a 3.1.3 Fundamentos de Reglas
Difusas.
Lógica Difusa y Lógica Difusa y Razonamiento Aproximado:Razonamiento Aproximado:
Proposiciones DifusasProposiciones Difusas
Material Anexo a 3.1.4.2 Reglas de Implicación
Difusa.
Proposiciones DifusasProposiciones Difusas
• Para proveer la capacidad del Para proveer la capacidad del razonamiento aproximado, la lógica razonamiento aproximado, la lógica difusa permite la utilización de difusa permite la utilización de predicados difusos, modificadores de predicados difusos, modificadores de predicados difusos, cuantificadores predicados difusos, cuantificadores difusos, difusos, y y calificadores difusoscalificadores difusos en en las proposiciones.las proposiciones.
Predicados Difusos
• En la LD, el predicado puede ser difuso, En la LD, el predicado puede ser difuso, por ejemplo: por ejemplo: Alto, Joven, Pronto, Amigo Alto, Joven, Pronto, Amigo dede,,
• Por lo tanto, se puede tener una Por lo tanto, se puede tener una proposición como “María es Joven.”proposición como “María es Joven.”
• La mayoría de los predicados en lenguaje La mayoría de los predicados en lenguaje natural son Difusos.natural son Difusos.
Modificadores De Predicados Difusos
• En lógica clásica el único modificador es la En lógica clásica el único modificador es la negación, NO.negación, NO.
• En la LD además existe: VERY, RATHER, En la LD además existe: VERY, RATHER, MORE OR LESS, SLIGHTLY, A LITTLE, MORE OR LESS, SLIGHTLY, A LITTLE, EXTREMELY.EXTREMELY.
• Tales modificadores se utilizan para Tales modificadores se utilizan para generar los valores de una variable generar los valores de una variable lingüística.lingüística.• This house is EXTREMELY Expensive”This house is EXTREMELY Expensive”
Cuantificadores Difusos (CD)Cuantificadores Difusos (CD)
• En LD un CD se interpreta como un En LD un CD se interpreta como un número difuso o una proporción difusa número difuso o una proporción difusa que provee una caracterización que provee una caracterización imprecisa de la cardinalidad de uno o imprecisa de la cardinalidad de uno o mas conjuntos difusos o no-difusos.mas conjuntos difusos o no-difusos.
• Los CD deben ser utilizados para Los CD deben ser utilizados para representar el significado de la representar el significado de la probabilidad contenida en las probabilidad contenida en las proposiciones.proposiciones.
• La LD permite el uso de La LD permite el uso de cuantificadores difusos, como por cuantificadores difusos, como por ejemplo: ejemplo: Most, Many, Several, Few, Most, Many, Several, Few, Much of, Frequently, Occasionally, Much of, Frequently, Occasionally, About Five.About Five.
• Proposición difusa:Proposición difusa:• ““Many students are happy”Many students are happy”
Calificadores Difusos (CalD)
• En la LD se tienen cuatro tipos de En la LD se tienen cuatro tipos de calificadores:calificadores:
• Calificación verdadera difusa (Calificación verdadera difusa (ττ),),• Calificación de probabilidad difusa,(Calificación de probabilidad difusa,(λλ))• Calificación de posibilidad difusa, (Calificación de posibilidad difusa, (ππ))• Calificación de usualidad difusa. Calificación de usualidad difusa.
“Usually (p)=Usually(Xes F)”“Usually (p)=Usually(Xes F)”
Lógica Difusa y Razonamiento Aproximado:
Razonamiento Aproximado
Razonamiento AproximadoRazonamiento Aproximado
• Como en cualquier lógica, las reglas Como en cualquier lógica, las reglas de inferencia en la LD gobiernan la de inferencia en la LD gobiernan la deducción de una proposición deducción de una proposición qq desde un conjunto de premisas.desde un conjunto de premisas.
• En la LD tanto las premisas como En la LD tanto las premisas como las conclusiones son proposiciones las conclusiones son proposiciones difusas. difusas.
• Existen cuatro modos principales de Existen cuatro modos principales de razonamiento difuso (o razonamiento razonamiento difuso (o razonamiento aproximado) en la LD:aproximado) en la LD:
• Razonamiento Categórico,Razonamiento Categórico,• Razonamiento Cualitativo,Razonamiento Cualitativo,• Razonamiento silogístico,Razonamiento silogístico,• Razonamiento disposicional.Razonamiento disposicional.
Razonamiento CategóricoRazonamiento Categórico
• Las premisas están en forma canónica Las premisas están en forma canónica ““XX es es AA” o en forma canonica ” o en forma canonica condicional “SI condicional “SI XX es es AA, Entonces , Entonces YY es es BB”, donde ”, donde AA y y BB son predicados son predicados difusos. difusos.
• Notación:Notación:– XX, , YY, , ZZ,...,...≡≡ variables (difusas) que toman variables (difusas) que toman
valores en los universos valores en los universos UU, , VV, , WW,...,...– AA, , BB, , CC,...,...≡≡ Predicados difusos. Predicados difusos.
• Las principales reglas de inferencia del Las principales reglas de inferencia del razonamiento categórico en LD son:razonamiento categórico en LD son:
Regla de proyección de inferencia,Regla de proyección de inferencia,Conjunción o regla de producto cartesiano de Conjunción o regla de producto cartesiano de
inferencia,inferencia,Disyunción o Regla de particularización de Disyunción o Regla de particularización de
inferencia,inferencia,Regla de Negación,Regla de Negación,Regla de vinculación de inferencia,Regla de vinculación de inferencia,Regla composicional de inferencia,Regla composicional de inferencia,Modus ponens generalizado,Modus ponens generalizado,Principio de extensión.Principio de extensión.
Razonamiento CualitativoRazonamiento Cualitativo
• En LD, el razonamiento cualitativo se En LD, el razonamiento cualitativo se refiere a un modo de razonamiento refiere a un modo de razonamiento en el cual la relación entrada-salida en el cual la relación entrada-salida de un sistema se expresa como una de un sistema se expresa como una colección de reglas difusas IF-THEN colección de reglas difusas IF-THEN en la cual las pre-condiciones y en la cual las pre-condiciones y consecuentes involucran variables consecuentes involucran variables difusas o lingüísticas. difusas o lingüísticas.
• Por ejemplo, si Por ejemplo, si X X y y Y Y son variables de son variables de entrada y entrada y ZZ es la variable de salida, la es la variable de salida, la relación entre, relación entre, XX, , YY, y , y Z Z se puede se puede expresar de la sisguiente forma:expresar de la sisguiente forma:– IF IF X X es es AA11 AND AND Y Y es es BB11, THEN , THEN ZZ es es CC11
– IF IF X X es es AA22 AND AND Y Y es es BB22, THEN , THEN ZZ es es CC22
– ... ... ...... ... ...
– IF IF X X es es AAnn AND AND YY es es BBnn, THEN Z es , THEN Z es CCnn
• Donde: Donde: AAii, , BBii, y , y CCii, , i=1,...,n,i=1,...,n, son son subconjuntos difusos de sus respectivos subconjuntos difusos de sus respectivos universos de discurso.universos de discurso.
• Dado que Dado que ZZ depende de depende de XX y y YY en las en las reglas anteriores, se puede emplear la reglas anteriores, se puede emplear la regla composicional de inferencia para regla composicional de inferencia para calcular el valor de calcular el valor de ZZ dado los valores de dado los valores de XX y y YY. .
Razonamiento SilogísticoRazonamiento Silogístico
• Al contrario del razonamiento Al contrario del razonamiento Categórico, éste está relacionado con Categórico, éste está relacionado con inferencias de premisas que inferencias de premisas que contienen cuantificadores difusos. contienen cuantificadores difusos.
• En su forma genérica, un silogismo En su forma genérica, un silogismo difuso se puede expresar como:difuso se puede expresar como:
pp= = QQ11 A´s A´s son son B´sB´s
qq= = QQ 22 C´s C´s son son D´sD´s
r r = = QQ33 E´s E´s son son F´sF´s
• Donde:Donde:
• A, B, C, D, E,A, B, C, D, E, y y F F son predicados son predicados difusos ínter-relacionados; difusos ínter-relacionados; QQ11, Q, Q22, son , son cuantificadores difusos dados; ycuantificadores difusos dados; y
• QQ33 es el cuantificador a ser decidido. es el cuantificador a ser decidido.
• Los seis silogismos difusos mas Los seis silogismos difusos mas importantes son:importantes son:
• Intersección o silogismo producto,Intersección o silogismo producto,• Silogismo por encadenamiento,Silogismo por encadenamiento,• Silogismo conjunción consecuente,Silogismo conjunción consecuente,• Silogismo disyunción consecuente,Silogismo disyunción consecuente,• Silogismo conjunción precondición,Silogismo conjunción precondición,• Silogismo disyunción precondición.Silogismo disyunción precondición.
Razonamiento Disposicional Razonamiento Disposicional
• En éste, las premisas son En éste, las premisas son disposiciones que deben contener, disposiciones que deben contener, explícitamente o implícitamente, el explícitamente o implícitamente, el cuantificador difuso “habitualmente” cuantificador difuso “habitualmente” (“Usually”); o sea que, las (“Usually”); o sea que, las proposiciones (proposiciones (preponderantemente pero preponderantemente pero
no necesariamenteno necesariamente) siempre son ) siempre son verdaderas.verdaderas.
• Algunas reglas de inferencia de Algunas reglas de inferencia de razonamiento disposicional son:razonamiento disposicional son:
• Regla de proyección disposicional de inferencia.Regla de proyección disposicional de inferencia.• Regla de implicación disposicional de inferencia,Regla de implicación disposicional de inferencia,• Modus ponens disposicional,Modus ponens disposicional,• Hipersilogismo de encadenamiento Hipersilogismo de encadenamiento
disposicional,disposicional,• Silogismo de conjunción consecuente Silogismo de conjunción consecuente
disposicional.disposicional.
Lógica Difusa y Lógica Difusa y Razonamiento Aproximado:Razonamiento Aproximado:
Modelo de Inferencia Modelo de Inferencia DifusaDifusa
Múltiples Reglas con Múltiples Reglas con Múltiples Múltiples
Antecedentes.Antecedentes.
Reglas con n antecedentes y m Reglas con n antecedentes y m consecuentes consecuentes
La interpretación de múltiples La interpretación de múltiples reglas generalmente se reglas generalmente se interpreta como la unión de las interpreta como la unión de las relaciones difusas relaciones difusas correspondientes a las reglas correspondientes a las reglas difusas. Por lo tanto, para un difusas. Por lo tanto, para un problema de problema de modus ponen modus ponen generalizadogeneralizado del siguiente tipo: del siguiente tipo:
premisa 1 (hecho) premisa 1 (hecho) xx es A' y es A' y yy es B', es B', premisa 2 (regla 1) Si premisa 2 (regla 1) Si xx es A es A11 y y yy es B es B11
entonces z es Centonces z es C11,,
premisa 2 (regla 2) Si premisa 2 (regla 2) Si xx es A es A22 y y yy es B es B2 2
entonces entonces zz es C es C22,, ____________________________________________________________________ Consecuente (conclusión):Consecuente (conclusión): z es C'z es C'
Se puede emplear el razonamiento Se puede emplear el razonamiento difuso mostrado en la Fig. A.1 difuso mostrado en la Fig. A.1 como un procedimiento de como un procedimiento de inferencia para derivar la inferencia para derivar la resultante salida el conjunto difuso resultante salida el conjunto difuso C'C'..
Para verificar este procedimiento Para verificar este procedimiento de inferencia, se tomara a de inferencia, se tomara a RR11 = = AA11 x B x B11 →→ C C11 y R y R22 = A = A22 x B x B22 →→ C C22. .

Debido a que el operador de Debido a que el operador de composición max-min composición max-min ( ()) es es distributivo, se puede usar el distributivo, se puede usar el operador operador ∪∪ para obtener la para obtener la siguiente expresión:siguiente expresión:
( ) ( )( )[ ] ( )[ ]
21
21
21'
CC
RBARBA
RRBAC
′∪′=′×′∪′×′=
∪′×′=
Donde C'Donde C'11 y C' y C'22 son los conjuntos son los conjuntos difusos inferidos por las reglas 1 y difusos inferidos por las reglas 1 y 2, respectivamente. 2, respectivamente.
La Fig. A.1 muestra gráficamente La Fig. A.1 muestra gráficamente la operación del razonamiento la operación del razonamiento difuso para múltiples reglas con difuso para múltiples reglas con múltiples antecedentes.múltiples antecedentes.
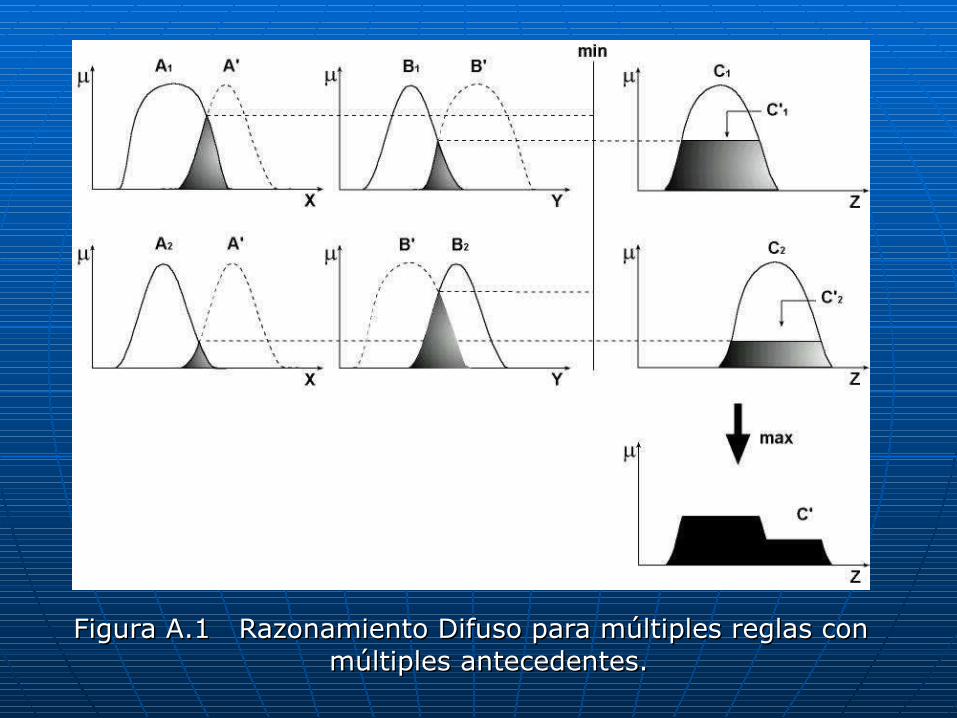
Figura A.1 Razonamiento Difuso para múltiples reglas con Figura A.1 Razonamiento Difuso para múltiples reglas con múltiples antecedentes.múltiples antecedentes.
Cuando una regla difusa dada asume la Cuando una regla difusa dada asume la forma "forma "Si x es A o y es B entonces Si x es A o y es B entonces z es Cz es C," entonces la fuerza del disparo ," entonces la fuerza del disparo esta dado como el máximo grado de esta dado como el máximo grado de apareamiento sobre la parte del apareamiento sobre la parte del antecedente para una condición dada.antecedente para una condición dada.
Esta regla difusa es equivalente a la unión Esta regla difusa es equivalente a la unión de las dos reglas difusas "de las dos reglas difusas "si x es A si x es A entonces z es Centonces z es C" y "" y "si y es B si y es B entonces z es Centonces z es C".".
Definición De Los Planos Definición De Los Planos De Inferencia.De Inferencia.
Inferencia en sistemas con Inferencia en sistemas con múltiples reglas:múltiples reglas:
(min, max, min)(min, max, min)
Planos De InferenciaPlanos De Inferencia
Se ha visto que para encontrar una Se ha visto que para encontrar una conclusión difusa, en el caso de una conclusión difusa, en el caso de una sola regla, es necesario utilizar sola regla, es necesario utilizar solamente operadores de conjunción solamente operadores de conjunción difusa, llámese implicación difusa o difusa, llámese implicación difusa o conectiva "conectiva "yy", por el hecho de ", por el hecho de representar alguna norma-t.representar alguna norma-t.
Planos De InferenciaPlanos De Inferencia
Cuando se consideran sistemas con Cuando se consideran sistemas con múltiples reglas, se introducen los múltiples reglas, se introducen los operadores de unión difusa para ligar operadores de unión difusa para ligar las acciones resultantes de cada las acciones resultantes de cada regla y así, obtener una respuesta regla y así, obtener una respuesta global difusa. Estos operadores global difusa. Estos operadores pueden ser cualesquier conorma-t.pueden ser cualesquier conorma-t.
Planos De InferenciaPlanos De Inferencia
Cada operador distinto dentro del Cada operador distinto dentro del proceso de inferencia difusa, va proceso de inferencia difusa, va definiendo un plano de inferencia, definiendo un plano de inferencia, comparándose esto con los comparándose esto con los circuitos combinatorios simples de circuitos combinatorios simples de la lógica booleana, del tipo suma la lógica booleana, del tipo suma de productos, donde se ubican de productos, donde se ubican solamente dos planos de solamente dos planos de operadores distintos: el plano "Y" operadores distintos: el plano "Y" y el plano "O". y el plano "O".
Planos De InferenciaPlanos De Inferencia
Como se vio anteriormente, se Como se vio anteriormente, se requiere de la conectiva "requiere de la conectiva "yy" " ((minmin max min) cuando es max min) cuando es necesario combinar varios necesario combinar varios antecedentes antes de llegar a antecedentes antes de llegar a una conclusión; el uso de esta una conclusión; el uso de esta conectiva se refiere al primer conectiva se refiere al primer plano de inferencia (plano de inferencia (al menosal menos).).

Planos De InferenciaPlanos De Inferencia
Cuando una sola regla apunta Cuando una sola regla apunta a un consecuente, ésta se a un consecuente, ésta se aplica directamente sobre él aplica directamente sobre él mismo, a través del uso de mismo, a través del uso de una función de implicación una función de implicación (min max (min max minmin).).
Planos De InferenciaPlanos De Inferencia
Sin embargo, en todos los Sin embargo, en todos los sistemas de la lógica difusa sistemas de la lógica difusa es común encontrar más de es común encontrar más de una regla que apunten a un una regla que apunten a un mismo consecuente. mismo consecuente.
Para poder Para poder elegirelegir a la regla que a la regla que deba trascender al consecuente deba trascender al consecuente ((la regla con mayor peso o la regla con mayor peso o fuerzafuerza), es necesario considerar ), es necesario considerar a algún operador conorma-t que a algún operador conorma-t que represente a la conectiva "o" represente a la conectiva "o" (min (min maxmax min), de manera que min), de manera que sirva como operador de liga sirva como operador de liga entre reglas.entre reglas.
Planos De Inferencia
Planos De InferenciaPlanos De Inferencia
La aplicación de esta La aplicación de esta conectiva se refiere al conectiva se refiere al segundo plano de inferencia segundo plano de inferencia ((a lo mása lo más).).
Planos De InferenciaPlanos De Inferencia
De este último resultado, se De este último resultado, se concluye la inferencia al aplicar concluye la inferencia al aplicar esta fuerza mediante una función esta fuerza mediante una función de implicación al conjunto difuso de implicación al conjunto difuso elegido en el consecuente (min elegido en el consecuente (min max max minmin), esta última ), esta última operación se denota como el operación se denota como el tercer plano de inferencia tercer plano de inferencia ((entoncesentonces).).

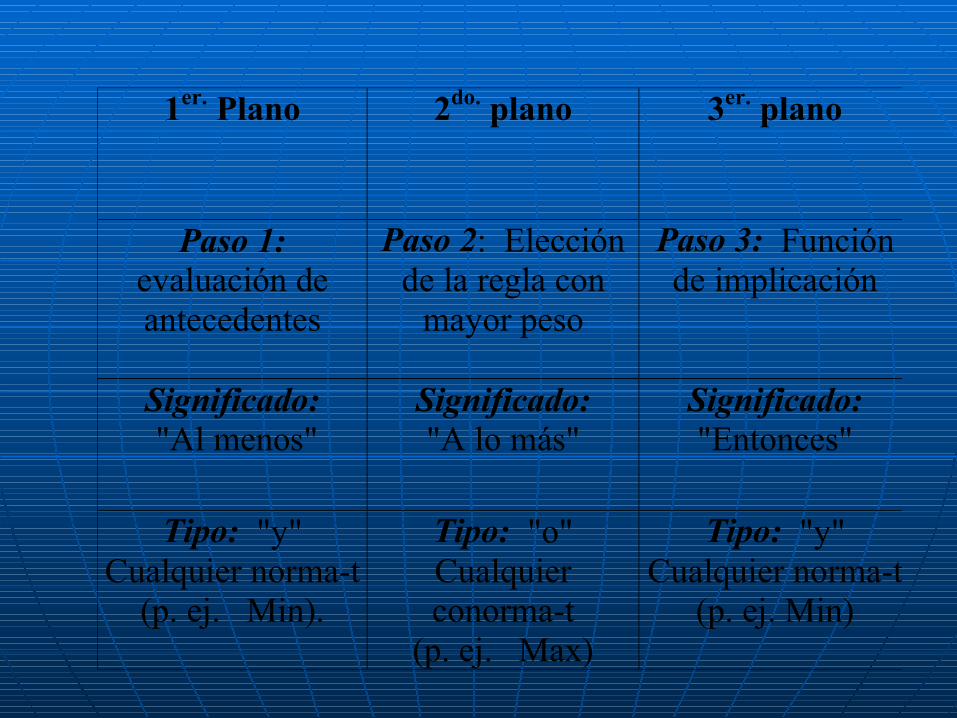
Planos de Inferencia en una Planos de Inferencia en una Unidad de Inferencia DifusaUnidad de Inferencia Difusa
1er. Plano 2do. plano 3er. planoPaso 1: evaluación de antecedentes Paso 2: Elección de la regla con
mayor pesoPaso 3: Función de implicación
Significado: "Al menos"
Significado:"A lo más"
Significado:"Entonces"
Tipo: "y"Cualquier norma-t
(p. ej. Min).
Tipo: "o"Cualquier conorma-t
(p. ej. Max)
Tipo: "y"Cualquier norma-t
(p. ej. Min)
1er. Plano 2do. plano 3er. plano
Paso 1:evaluación deantecedentes
Paso 2: Elecciónde la regla con
mayor peso
Paso 3: Funciónde implicación
Significado: "Al menos"
Significado:"A lo más"
Significado:"Entonces"
Tipo: "y"Cualquier norma-t
(p. ej. Min).
Tipo: "o"Cualquierconorma-t
(p. ej. Max)
Tipo: "y"Cualquier norma-t
(p. ej. Min)
Lógica Difusa y Lógica Difusa y Razonamiento Razonamiento Aproximado:Aproximado:
Proposiciones DifusasProposiciones Difusas
Material Anexo a 3.1.4.2 Reglas de Implicación
Difusa.
ESTRUCTURA BÁSICA Y ESTRUCTURA BÁSICA Y OPERACIÓN DE LOS SISTEMAS OPERACIÓN DE LOS SISTEMAS
DE CONTROL LÓGICOS DE CONTROL LÓGICOS DIFUSOSDIFUSOS
Material Anexo a: Material Anexo a: Modelos Basados en Reglas–DifusasModelos Basados en Reglas–Difusas
para Aproximar una Funciónpara Aproximar una Función
IntroducciónIntroducción
En 1973 a raíz de un reciente articulo de En 1973 a raíz de un reciente articulo de ZadehZadeh llamado llamado "Analysis of complex "Analysis of complex systems and decision processes"systems and decision processes", el , el profesor profesor Ebrahim MamdaniEbrahim Mamdani de la de la universidad de Londres y su alumno universidad de Londres y su alumno Sedrak AssilianSedrak Assilian construyeron el primer construyeron el primer sistema de control automático basado en sistema de control automático basado en reglas difusas. reglas difusas.
Dicho sistema fue diseñado para Dicho sistema fue diseñado para mantener la presión de una caldera y mantener la presión de una caldera y la velocidad del pistón constante en la velocidad del pistón constante en una maquina de vapor; el sistema una maquina de vapor; el sistema aprendía por sí mismo. aprendía por sí mismo.
El sistema usaba información de El sistema usaba información de tres tipos, para lo cual se crearon tres tipos, para lo cual se crearon tres escalas movibles; dos sobre tres escalas movibles; dos sobre el estado de la caldera (entrada), y el estado de la caldera (entrada), y otro un comando (salida), estas otro un comando (salida), estas escalas son:escalas son:
1.- 1.- Error de presión (FP): ¿Qué tan Error de presión (FP): ¿Qué tan lejos está la presión deseada?.lejos está la presión deseada?.
2.- Cambio en el error de presión 2.- Cambio en el error de presión (CEP): ¿Qué tan rápido la presión (CEP): ¿Qué tan rápido la presión se acerca o se aleja de la se acerca o se aleja de la deseada?.deseada?.
3.- Cambio en calor (CC): ¿Cuál es 3.- Cambio en calor (CC): ¿Cuál es la respuesta correcta? (Comando la respuesta correcta? (Comando de salida).de salida).
Después establecieron siete Después establecieron siete propiedades lingüísticas para cada propiedades lingüísticas para cada escala:escala:

PB - Positivo Grande.PB - Positivo Grande. PM - Positivo Media.PM - Positivo Media. PS - Positivo pequeño.PS - Positivo pequeño. ZE - Cero.ZE - Cero. NS - Negativo pequeño.NS - Negativo pequeño. NM - Negativo media.NM - Negativo media. NB - Negativo grande.NB - Negativo grande.
Todos estos conjuntos difusos Todos estos conjuntos difusos sobrepuestos son del mismo tamaño y sobrepuestos son del mismo tamaño y forma (triangular), y fueron espaciados forma (triangular), y fueron espaciados uniformemente a lo largo de cada línea.uniformemente a lo largo de cada línea.
Después se construyo la red de reglas Después se construyo la red de reglas usando estos conjuntos. Con esto no solo usando estos conjuntos. Con esto no solo describieron el trabajo del sistema en describieron el trabajo del sistema en términos simples. Si no que capturaron la términos simples. Si no que capturaron la experiencia de operadores expertos.experiencia de operadores expertos.
El sistema de control completo es El sistema de control completo es representado por la figura 6.1, en la representado por la figura 6.1, en la cual los cuadros en blanco no son cual los cuadros en blanco no son necesarios debido a que en la practica necesarios debido a que en la practica el sistema nunca estará en ellos. Cada el sistema nunca estará en ellos. Cada cuadro es una regla; por ejemplo:cuadro es una regla; por ejemplo: Regla 1: Regla 1: IFIF EPEP es PS es PS AND AND CEPCEP es ZE es ZE
THENTHEN CCCC es NS es NS Regla 2: Regla 2: IFIF EPEP es ZE es ZE AND AND CEPCEP es ZE es ZE
THENTHEN CCCC es ZE es ZE Regla 3: Regla 3: IFIF EPEP es PS es PS AND AND CEPCEP es NS es NS
THENTHEN CCCC es NS es NS
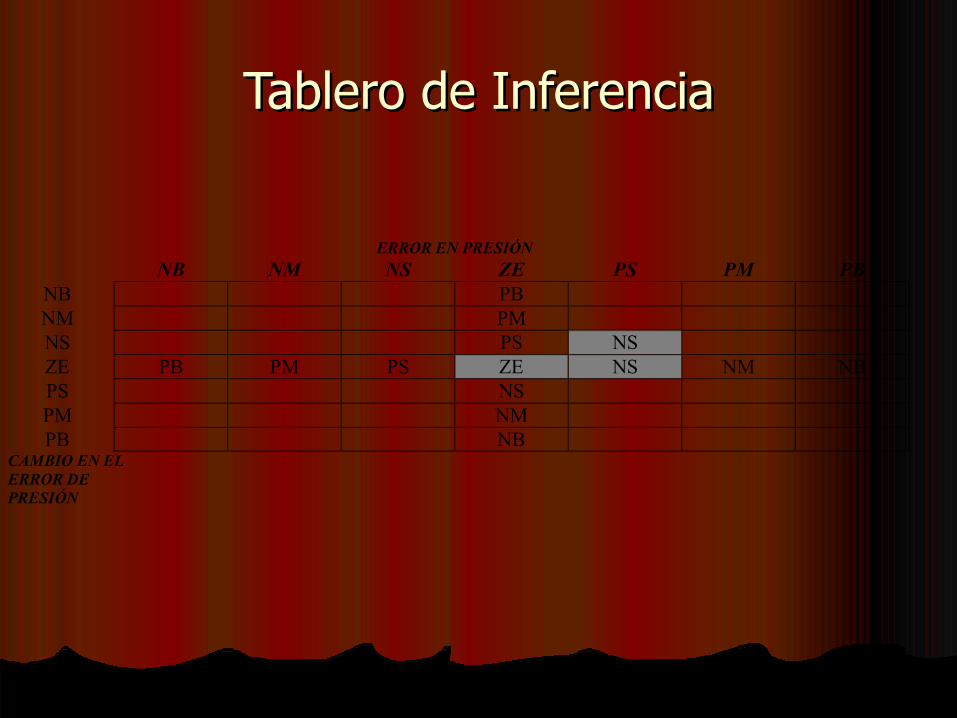
Tablero de InferenciaTablero de Inferencia
ERROR EN PRESIÓN
NB NM NS ZE PS PM PBNB PBNM PMNS PS NSZE PB PM PS ZE NS NM NBPS NSPM NMPB NB
CAMBIO EN ELERROR DEPRESIÓN
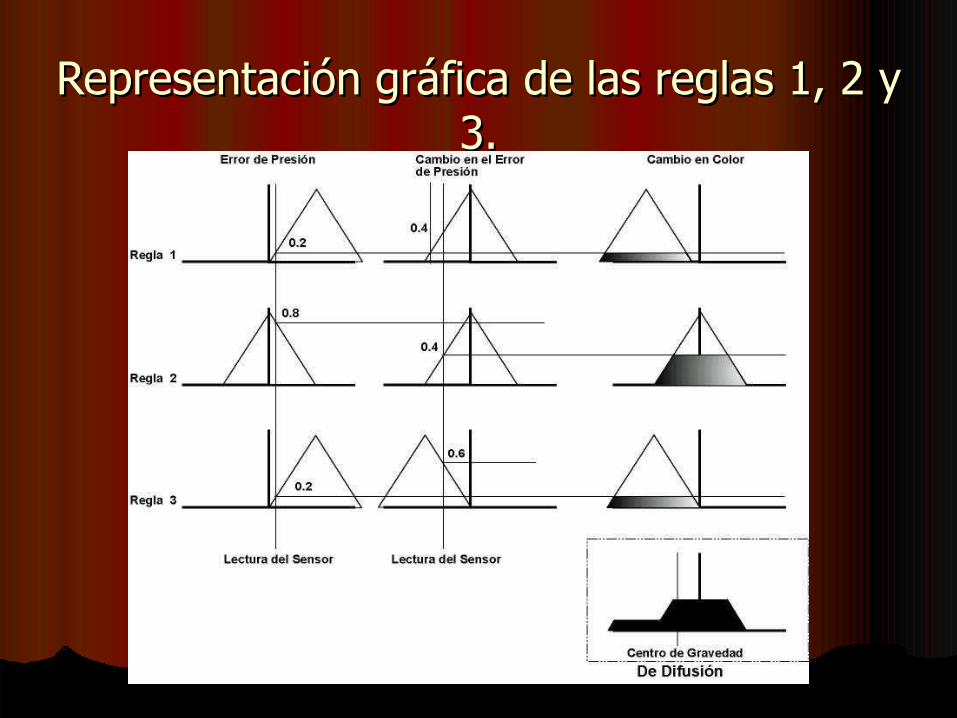
Representación gráfica de las reglas 1, 2 y Representación gráfica de las reglas 1, 2 y 3.3.

Espacios de Espacios de Entrada/SalidaEntrada/Salida..
Tablero de Inferencia.Tablero de Inferencia.
Espacios de Entrada/SalidaEspacios de Entrada/Salida
Un tablero de inferencia es una Un tablero de inferencia es una representación geométrica de los representación geométrica de los conjuntos difusos y se emplea para conjuntos difusos y se emplea para especificar esquemáticamente la especificar esquemáticamente la combinación deseada de combinación deseada de entradas/salidas.entradas/salidas.

Los tableros de inferencia tienen la Los tableros de inferencia tienen la forma de una matriz de acciones, la forma de una matriz de acciones, la cual utiliza N conjuntos difusos cual utiliza N conjuntos difusos ((variable lingüísticavariable lingüística), definidos en ), definidos en una variable de entrada de un una variable de entrada de un sistema de control como el número sistema de control como el número de renglones y, los M conjuntos de renglones y, los M conjuntos difusos definidos para una segunda difusos definidos para una segunda variable de entrada, como el variable de entrada, como el número de columnasnúmero de columnas
Cada celda en el arreglo es llenada Cada celda en el arreglo es llenada con el nombre de uno de los P con el nombre de uno de los P conjuntos difusos definidos para conjuntos difusos definidos para alguna variable de salida.alguna variable de salida.
De esta forma es posible crear el De esta forma es posible crear el algoritmo de control para el algoritmo de control para el sistema, plasmando en reglas de sistema, plasmando en reglas de control la relación de control la relación de combinaciones entradas/salidas. combinaciones entradas/salidas.
Tablero De InferenciaTablero De Inferencia
La creación de un tablero debe La creación de un tablero debe considerar en primer lugar la considerar en primer lugar la especificación de las áreas que son especificación de las áreas que son intuitivamente más obvias, y sí el intuitivamente más obvias, y sí el sistema que esta siendo modelado es sistema que esta siendo modelado es complejo, se describen enseguida las complejo, se describen enseguida las reglas que son vagas, aunque reglas que son vagas, aunque intuitivamente correctas.intuitivamente correctas.
Es conveniente que los cambios Es conveniente que los cambios entre celdas adyacentes sean lo entre celdas adyacentes sean lo más graduales posibles, dado que más graduales posibles, dado que si existen cambios bruscos estos se si existen cambios bruscos estos se verán reflejado como áreas con verán reflejado como áreas con variaciones abruptas, ésto durante variaciones abruptas, ésto durante el análisis del funcionamiento del el análisis del funcionamiento del sistema, que a su vez produce sistema, que a su vez produce cambios a la salida del sistema cambios a la salida del sistema poco gradualespoco graduales
Si se cuenta con "n" variables de Si se cuenta con "n" variables de entrada, y "m" conjuntos difusos entrada, y "m" conjuntos difusos definidos en cada una se tiene que, definidos en cada una se tiene que, para una sola salida el número de para una sola salida el número de reglas que se pueden definir esta reglas que se pueden definir esta dado por la siguiente expresión:dado por la siguiente expresión:
.nmreglasdenúmero =
¿Cuántas Reglas Definir?
Si se tiene que: m = 7 y n = 2; Si se tiene que: m = 7 y n = 2; por lo tanto el número de reglas por lo tanto el número de reglas que se pueden definir para este que se pueden definir para este sistema sería:sistema sería:
.4972 reglasreglasdenúmero ==
Lo cual solamente representa las combinaciones posibles que se pueden realizar en relación con las variables y conjuntos definidos en los antecedentes.

Si se considera que tales combinaciones Si se considera que tales combinaciones pueden apuntar a "M" conjuntos pueden apuntar a "M" conjuntos definidos en el consecuente, entonces definidos en el consecuente, entonces el número total de reglas distintas que el número total de reglas distintas que se pueden definir esta dado por la se pueden definir esta dado por la siguiente expresión:siguiente expresión:
Así se tiene que el sistema acepta Así se tiene que el sistema acepta 7(49) = 343 reglas distintas.7(49) = 343 reglas distintas.
( ).nmMsdisponiblereglasdenúmero =
Componentes De Un CLDComponentes De Un CLD
Una etapa de Fusificación, una Una etapa de Fusificación, una etapa de evaluación de reglas, una etapa de evaluación de reglas, una etapa de defusificación y una base etapa de defusificación y una base de conocimientode conocimiento. La base de . La base de conocimiento, está compuesta a la conocimiento, está compuesta a la vez, por los conjuntos difusos vez, por los conjuntos difusos definidos para las entradas y definidos para las entradas y salidas del sistema y el conjunto de salidas del sistema y el conjunto de reglas difusas.reglas difusas.
Etapa De FusificaciónEtapa De Fusificación
La Fusificación es el proceso de La Fusificación es el proceso de asignar o calcular un valor que asignar o calcular un valor que represente un grado de membresía (o represente un grado de membresía (o valor subjetivo) para todos los valor subjetivo) para todos los conjuntos difusos definidos sobre conjuntos difusos definidos sobre alguna variable de entrada, dado que alguna variable de entrada, dado que el estado actual de dicha variable se el estado actual de dicha variable se toma como una cantidad no difusa.toma como una cantidad no difusa.
Etapa De Evaluación De Etapa De Evaluación De ReglasReglas
Esta etapa, realiza la evaluación de Esta etapa, realiza la evaluación de las reglas difusas que están las reglas difusas que están contenidas en la base de las reglas, contenidas en la base de las reglas, en espera de lograr una meta en espera de lograr una meta determinada. La combinación de determinada. La combinación de operadores que se utilice en la operadores que se utilice en la implementación de los planos de implementación de los planos de inferencia determina el método de inferencia determina el método de inferencia utilizado.inferencia utilizado.
Dictado De Reglas DifusasDictado De Reglas Difusas
1.1. Dentro de una matriz se coloca Dentro de una matriz se coloca sobre su eje sobre su eje xx una entrada y una entrada y sobre el eje sobre el eje yy la otra entrada la otra entrada con sus etiquetas con sus etiquetas correspondientes, y en cada correspondientes, y en cada una de sus coordenadas se una de sus coordenadas se establece la salida deseadaestablece la salida deseada..
1.1. El primer paso a realizar es llenar El primer paso a realizar es llenar las áreas en donde las acciones las áreas en donde las acciones son intuitivamente más obvias. Se son intuitivamente más obvias. Se inicia por los casos extremos inicia por los casos extremos como las orillascomo las orillas..
2.2. Después de ello se procede a Después de ello se procede a llenar los campos menos obvios, llenar los campos menos obvios, con lo cual se obtiene la matriz con lo cual se obtiene la matriz completamente llena completamente llena
La La matriz se pasa a la forma de matriz se pasa a la forma de reglas de inferencia difusa las reglas de inferencia difusa las cuales son de la forma cuales son de la forma “ “ if..then..”if..then..”
La Estructura Básica De Un CLDLa Estructura Básica De Un CLD
a)a) Una Una base de reglasbase de reglas, la cual contiene una , la cual contiene una selección de reglas difusas;selección de reglas difusas;
b)b) Una Una base de datosbase de datos (o diccionario), la cual (o diccionario), la cual define las funciones de membresía usadas define las funciones de membresía usadas en las reglas difusas;en las reglas difusas;
c)c) Y un Y un mecanismo de razonamientomecanismo de razonamiento, el cual , el cual ejecuta el procedimiento de inferencia sobre ejecuta el procedimiento de inferencia sobre las reglas y los hechos dados para derivar las reglas y los hechos dados para derivar una salida razonable o conclusión.una salida razonable o conclusión.
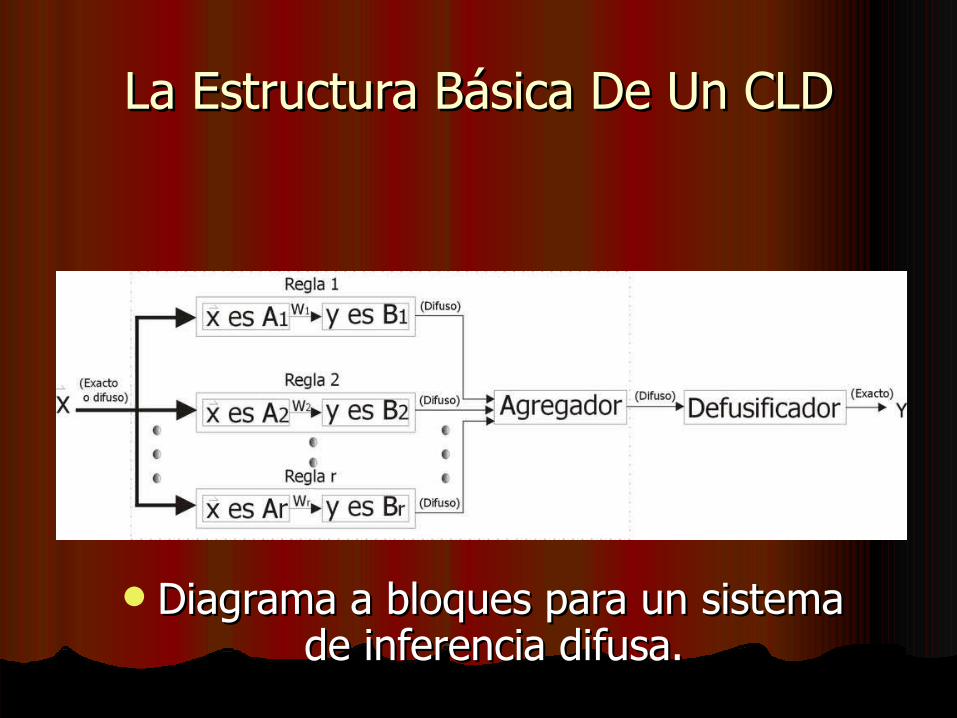
La Estructura Básica De Un CLDLa Estructura Básica De Un CLD
Diagrama a bloques para un sistema Diagrama a bloques para un sistema de inferencia difusa.de inferencia difusa.
Etapa De Etapa De DefusificaciónDefusificación
Defusificar significa trazar una Defusificar significa trazar una "línea "línea recta"recta" en algún punto del universo de en algún punto del universo de discurso de la variable de salida, el discurso de la variable de salida, el objetivo de todas las funciones de objetivo de todas las funciones de defusificación es el proceso de defusificación es el proceso de encontrar el mejor lugar a lo largo del encontrar el mejor lugar a lo largo del universo de discurso para trazar esta universo de discurso para trazar esta línea.línea.
La etapa de defusificación parte de La etapa de defusificación parte de un conjunto de funciones de un conjunto de funciones de membresía definidas sobre alguna membresía definidas sobre alguna variable de salida de un CLD, y variable de salida de un CLD, y están truncadas en altura por él están truncadas en altura por él ultimo plano de inferencia, como ultimo plano de inferencia, como resultado de haber evaluado a resultado de haber evaluado a todas las reglas correspondientes a todas las reglas correspondientes a cada conjunto difuso de salidacada conjunto difuso de salida
Métodos De Defusificación Métodos De Defusificación
En general, existen CINCO métodos En general, existen CINCO métodos para defusificar un conjunto difuso para defusificar un conjunto difuso AA de un universo de discurso de un universo de discurso ZZ, donde , donde el conjunto difuso el conjunto difuso AA generalmente generalmente se representa por una función de se representa por una función de membresía de salida agregada.membresía de salida agregada.
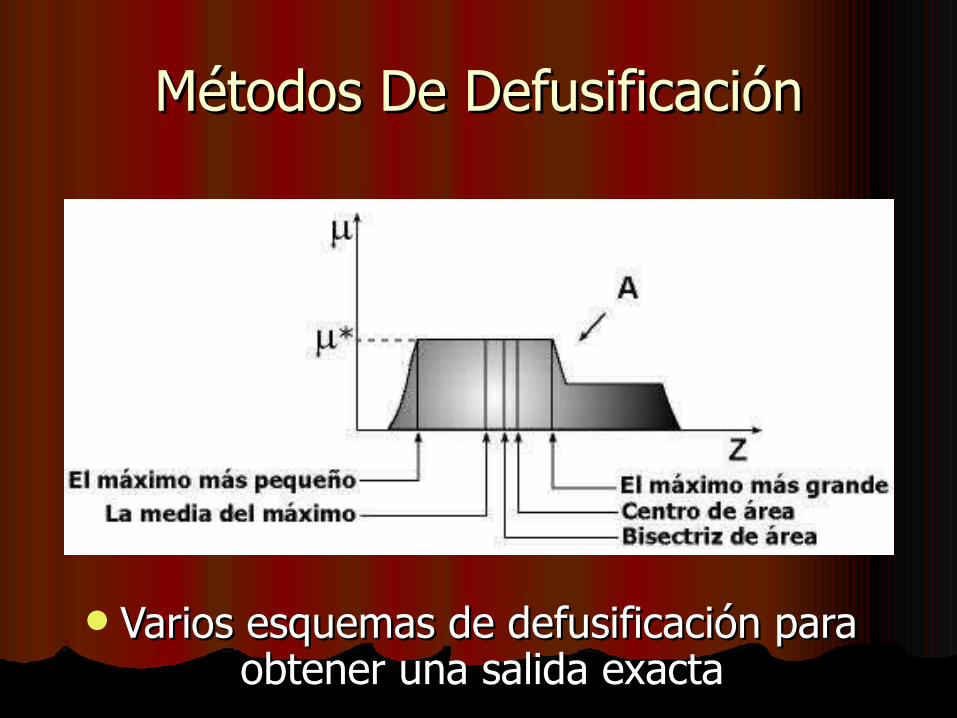
Métodos De DefusificaciónMétodos De Defusificación
Varios esquemas de defusificación para Varios esquemas de defusificación para obtener una salida exactaobtener una salida exacta
Métodos De DefusificaciónMétodos De Defusificación
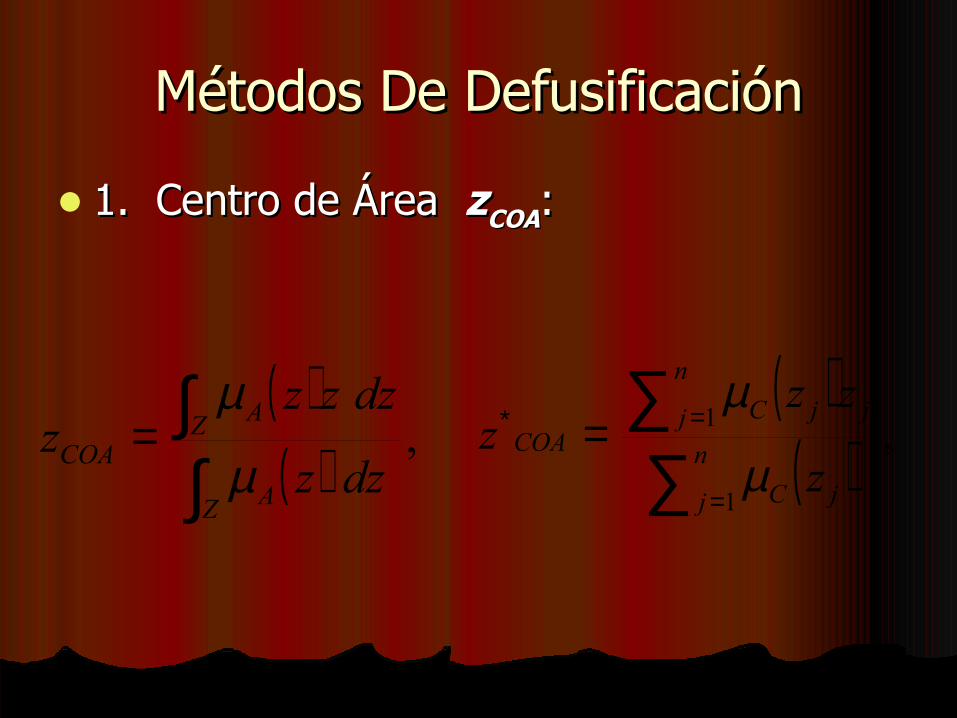
1. Centro de Área 1. Centro de Área zzCOACOA::
( )( )
,∫∫=
Z A
Z A
COAdzz
dzzzz
µ
µ ( )( ) ,
1
1
∑∑
=
=∗ = n
j jC
n
j jjCCOA
z
zzz
µ
µ
Métodos De DefusificaciónMétodos De Defusificación
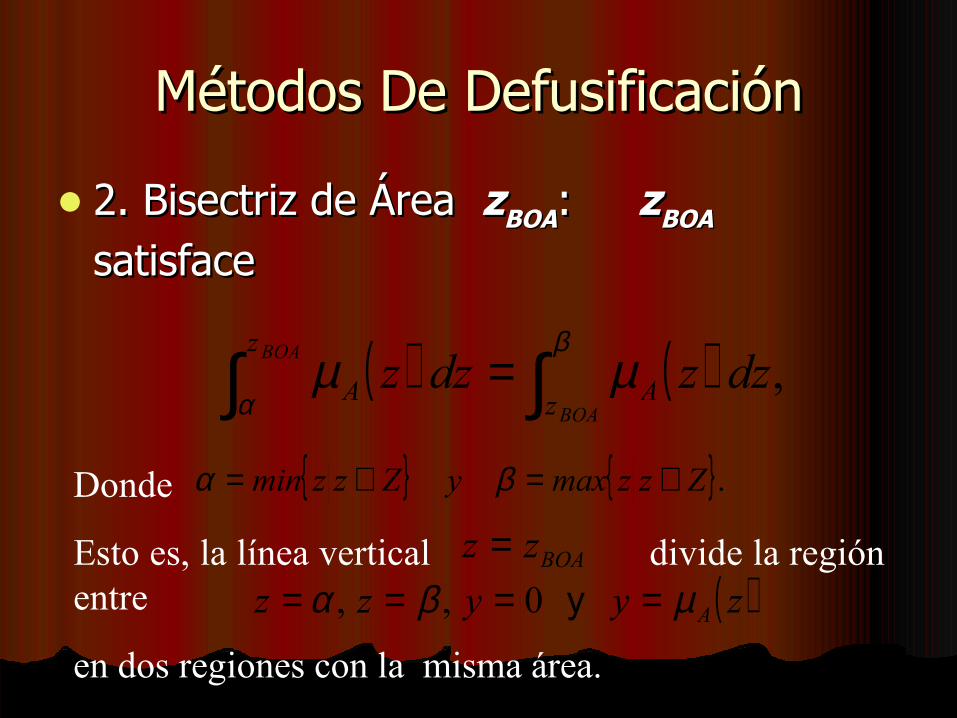
2. Bisectriz de Área 2. Bisectriz de Área zzBOABOA: : zzBOABOA satisfacesatisface
( ) ( )∫ ∫=BOA
BOA
z
z AA dzzdzzα
βµµ ,
{ } { }.ZzzmaxyZzzmin ∈=∈= βα
BOAzz =( )zyyzz Aµβα ==== y0,,
Donde
Esto es, la línea vertical divide la región entre
en dos regiones con la misma área.
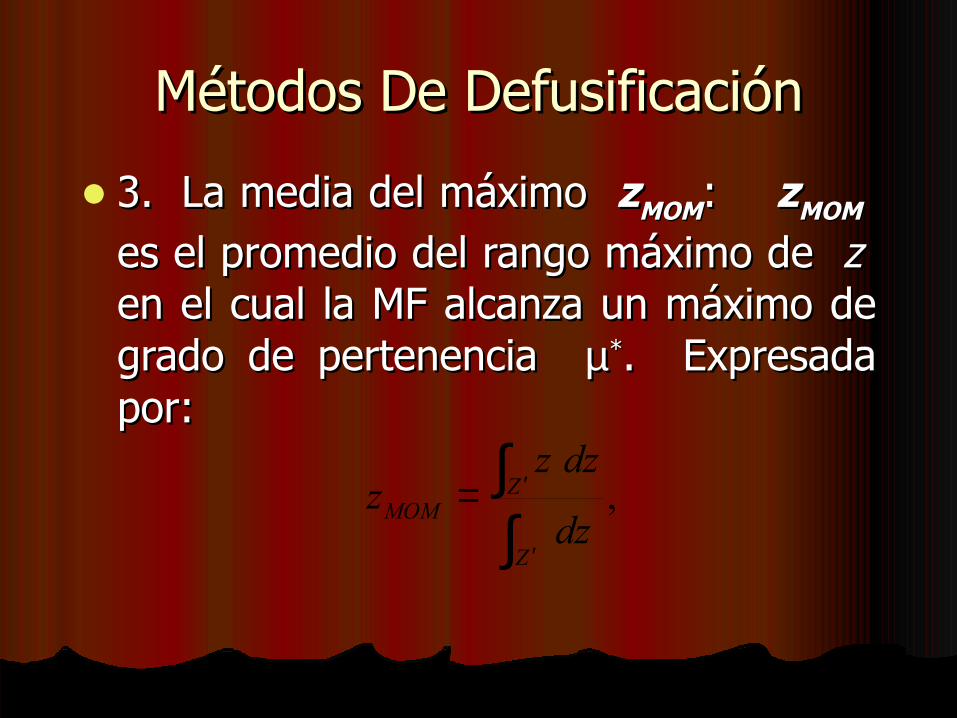
Métodos De DefusificaciónMétodos De Defusificación
3. La media del máximo 3. La media del máximo zzMOMMOM: : zzMOMMOM es el promedio del rango máximo de es el promedio del rango máximo de zz en el cual la MF alcanza un máximo de en el cual la MF alcanza un máximo de grado de pertenencia grado de pertenencia µµ**. Expresada . Expresada por:por:
,∫∫
′
′=Z
ZMOM
dz
dzzz
Métodos De DefusificaciónMétodos De Defusificación
4. El máximo más pequeño 4. El máximo más pequeño zzSOMSOM: : zzSOMSOM es el es el mínimo (en términos de magnitud) del máximo mínimo (en términos de magnitud) del máximo de de zz..
5. El máximo más grande 5. El máximo más grande zzLOMLOM: : zzLOMLOM es el es el máximo (en términos de magnitud) del máximo máximo (en términos de magnitud) del máximo de de zz..
Debido a sus obvios resultados, Debido a sus obvios resultados, zzSOMSOM, y , y zzLOMLOM no son usados tan frecuentemente como los no son usados tan frecuentemente como los otros tres métodos de defusificación.otros tres métodos de defusificación.
ESTRUCTURA BÁSICA Y ESTRUCTURA BÁSICA Y OPERACIÓN DE LOS SISTEMAS OPERACIÓN DE LOS SISTEMAS
DE CONTROL LÓGICOS DE CONTROL LÓGICOS DIFUSOSDIFUSOS
Material Anexo a: Material Anexo a: Modelos Basados en Reglas–DifusasModelos Basados en Reglas–Difusas
para Aproximar una Funciónpara Aproximar una Función