sistema de vision artificial para el …repository.udistrital.edu.co/bitstream/11349/8339/1... ·...
TRANSCRIPT
1
SISTEMA DE VISION ARTIFICIAL PARA EL CONTROL DE PROTOTIPOS
DE VEHICULOS NO TRIPULADOS
EDWAR ARMANDO ROMERO GARZON
YEFERSON SOTELO ORTIZ
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
TECNOLOGÍA MECÁNICA
BOGOTÁ
2016
SISTEMA DE VISION ARTIFICIAL PARA EL CONTROL DE PROTOTIPOS
DE VEHICULOS NO TRIPULADOS
EDWAR ARMANDO ROMERO GARZON
YEFERSON SOTELO ORTIZ
TRABAJO DE GRADO PARA OPTAR POR EL TÍTULO DE TECNÓLOGO
MECÁNICO
DOCENTE DIRECTOR: ING. JOHN ALEJANDRO FORERO CASALLAS
GRUPO DE INVESTAGACION: DISING
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
TECNOLOGÍA MECÁNICA
BOGOTÁ
2
2016
INTRODUCCIÓN
En los últimos años la industria ha tenido una transformación muy importante debido a
la necesidad de satisfacer a un cliente, el cual cada vez es más difícil de sorprender, por
lo que fue necesario implementar procesos de automatización en el desarrollo de la
producción. Estos procesos se han visto mejorados con el tiempo, debido principalmente
al gran auge y desarrollo tecnológico que se da en la utilización de vehículos no
tripulados y su integración en diversos campos.
Este proyecto surgió debido a la necesidad de mejorar los procesos de automatización,
hacerlos más rápidos y económicos. Trabajando en un entorno pequeño comparado con
las grandes celdas de manufactura que existen en la industria, pero solucionando
problemas importantes como lo es el desplazamiento aleatorio entre las estaciones.
En esta monografía, se propone la implementación de un sistema de visión artificial para
el control de vehículo no tripulados, a partir de esto, se explica el reconocimiento
tecnológico y operativo de la plataforma móvil; se exponen los componentes necesarios
para la utilización del sistema de visión artificial. se presenta el sistema de visión artificial
y el algoritmo de control. Finalmente, se muestran los resultados de la puesta en marcha
del sistema.
3
1. PLANTEAMIENTO DEL PROBLEMA
Para la industria en general, y las actividades o aplicaciones de la vida civil, los últimos
años han sido de gran transformación y avance, debido principalmente al gran auge y
desarrollo tecnológico que se ha venido dando en la utilización de vehículos no
tripulados y su integración en diversos campos de nuestras vidas, lo que ha cambiado
ampliamente los procesos de producción y tareas en gran parte del mundo. Sin
embargo, países no industrializados y de bajos recursos económicos, aún son ajenos al
gran cambio tecnológico que conlleva a la posibilidad de mejorar significativamente
muchas tareas y procesos que bien podrían ser resueltas con mayor efectividad y sin
poner en peligro la integridad física de las personas que las desempeñan. En países
como los Estados Unidos o Rusia, desde hace un largo tiempo han comenzado a operar
nuevos sistemas de defensas nacionales utilizando vehículos no tripulados apoyados
en las más modernas tecnologías cuyos países son dominantes en este sector y quienes
constantemente marcan pautas de desarrollo en dicha área [1].
Surgen entonces los cuestionamientos: ¿Cuál es la posibilidad de generar sistemas de
control y desplazamiento para vehículos no tripulados terrestres sin tener grandes
recursos económicos? y ¿Cómo lograr que dichos sistemas de control y desplazamiento
se puedan aplicar a variados procesos de producción obteniendo resultados eficientes
especialmente en las celdas de manufactura flexible?
Fundamentados en este contexto, en el presente proyecto se investigará en qué grado
se puede desarrollar un sistema de control y desplazamiento para vehículos no
tripulados terrestres, el cual no conlleve a la utilización de grandes recursos económicos
pero buscando resultados eficientes, además de realizarse una amplia investigación
sobre los distintos métodos de control y desplazamiento en los vehículos no tripulados,
con el fin de escoger alguno, el cual pueda suplir satisfactoriamente y llegue a cumplir
un papel deseable basados en sistemas de producción como lo son las celdas de
manufactura. Para lo dicho se contará con la ayuda de software de ingeniería que pueda
contribuir a la elaboración del sistema de control y desplazamiento con aplicación de
estos en vehículos tipo Lego Mindstorm®, evaluando dichos resultados y posibles
aplicaciones en los procesos industriales, para así promover su aplicación y estudio de
este tipo de tecnología.
2. ESTADO DEL ARTE
4
Como es bien sabido, los vehículos no tripulados se refieren generalmente a cualquier
tipo de vehículo que se pueda conducir sin un piloto en el interior de este. Los hay tanto
aéreos como terrestres normalmente llamados por sus siglas en inglés UGV y UAV
(Unmanned Ground Vehicle y Unmanned Aerial Vehicle) respectivamente. Por ejemplo,
Packbots®, robots para uso por parte de policías y militares o Roomba®, un aspirador
doméstico robótico, son vehículos terrestres no tripulados fabricados por
iRobotCorporation®. Los vehículos no tripulados básicamente son accionados por un
operador usando algún dispositivo controlador a una distancia relativa de dicho vehículo.
Además, los vehículos no tripulados pueden ser accionados a lo largo de una trayectoria
predeterminada de manera automática. Esta trayectoria puede ser almacenada en un
ordenador o puede ser comunicada directamente al vehículo no tripulado [2].
Se abarcará principalmente con referencias internacionales donde se han realizado la
mayor cantidad de estudios: el caso de la construcción de un robot no tripulado de bajo
costo desarrollado por Centre forIntelligentSystemsResearch, en Geelong, Australia, en
el cual desarrollaron un sistema de desplazamiento del robot OzTug que requiere seguir
una trayectoria predefinida mientras se mantiene una velocidad de avance especificada
por un usuario, donde se basaron en un sistema de control de visión de lógica difusa
que les permitió realizar un seguimiento de las rutas predefinidas buscando solución al
desplazamiento del vehículo en una gran gama de escenarios, donde la utilización de
entornos virtuales mediante Webots [3] dio la facilidad a los investigadores de evaluar
rápidamente configuraciones propuestas sin la necesidad de crear prototipos físicos,
dando como resultado un equilibrio entre el desarrollo óptimo del vehículo y costos [4].
Se llevan a cabo simulaciones durante las cuales el robot realizó las trayectorias
ejecutadas comportándose de manera que sigue la trayectoria predefinida.
Por la misma vía pero enfocado a otro tipo de metodología y dando lugar a nuevas
soluciones, se promovió en la NationalUniversity of Sciences and Technology (NUST)
ubicada en Rawalpindi, Pakistán, una novedosa solución para la mayor tarea en un
sistema de transporte inteligente la cual es el control de dirección autónoma, sin más,
se abordó de manera precisa y eficiente el control de los vehículos no tripulados
mediante la incorporación de un algoritmo muy conocido Ant-Miner (cAnt-Miner), que es
adaptado de AntColonyOptimization [5], la singularidad del algoritmo propuesto se
encuentra en su capacidad de dirigir con precisión el vehículo en caminos estructurados
y en caminos no estructurados en tiempo real, sin necesidad de un meticuloso cálculo.
El algoritmo utiliza primero los bordes de carretera para evaluar la dirección de la
trayectoria a través de la clasificación mediante cAnt-Miner. Posteriormente, se conduce
el vehículo de acuerdo con la particular dirección utilizando un controlador de lógica
difusa. La sinergia del algoritmo evolutivo, cAntMiner, para el desarrollo de la trayectoria
con el control de lógica difusa permite dirección autónoma, con alta eficacia. La
metodología del algoritmo utilizado se aventaja con respecto a otros algoritmos que,
aunque han producido prometedores resultados, se han convertido computacionalmente
caros para la aplicación en tiempo real o el compromiso en la precisión [6]. Además de
eso, algunos de los sistemas se basan en una integración de sensores altamente
complejos.
Por otro lado, uno de los grandes avances en los vehículos no tripulados son los
llamados vehículos guiados automáticamente o AGVs por sus siglas en inglés
5
(Automated Guided Vehicles), estos sistemas requerían una serie de estructuras para
su funcionamiento como lo podrían ser cables, por lo que necesitaban rutas
preprogramadas, dificultando su posible modificación o expansión de la celda, es decir,
siendo inflexibles e ineficiente. Esta preocupación llevó a que se hicieran avances en
esta área, como la que hicieron unos estudiantes de la University of Ontario Institute of
Technology, en Oshawa, Ontario, en el cual desarrollaron un sistema para el control de
múltiples vehículos autónomos usando robots Lego Mindstorms® [7], logrando unos
dispositivos de control y unos protocolos de comunicación muy eficientes.
Ellos definieron el protocolo en el cual indicaban que iba a controlar el PC y que iba a
controlar el AGV. Así para realizar una trayectoria el PC necesita el nodo de ubicación
del AGV (el PC envía un mensaje al vehículo y este le responde con la ubicación actual),
así como el nodo de destino, una vez teniendo estos dos puntos el PC usa un algoritmo
para determinar la ruta que debe tomar el AGV y le envía la orden al AGV. Una vez el
vehículo recibe la orden sigue las acciones necesarias para llegar al nodo requerido en
la distancia más corta posible. Al tener varios AGV y un trabajo, el PC mira cuantos
están ocupados y cuantos desocupados, luego con los desocupados determina su
posición actual y analiza la ruta de cada uno de ellos al trabajo requerido, por ultimo elije
el que tenga la ruta más corta [8].
Siguiendo con el sistema de control de los UGVs, los estudiantes de Department of
Mechanical Engineering, Hanyang University, de Seul, Korea, desarrollaron un prototipo
de robot de transporte no tripulado para su aplicación en la construcción. El robot
transporta materiales de construcción después de una trayectoria de referencia pre-
configurada. La configuración del prototipo fue considerada en tres partes: la trayectoria
del vehículo, el sistema de control y un sistema multisensor, donde el sistema de
sensores del robot móvil fue considerada como la parte más importante pues esta influye
en el desarrollo de las anteriores, y a su vez se compone de tres partes. En primer lugar
están los codificadores de información de la odometría o el estudio de la estimación de
la posición de vehículos con ruedas durante la navegación, en segundo lugar es utilizado
una IMU (Sistema de Medición de Inercia) el cual es el componente principal de los
sistemas de navegación inercial usados en aviones, naves espaciales, buques y misiles
guiados entre otros. En este uso, los datos recolectados por los sensores de una IMU
permiten a un computador seguir la posición del aparato, usando un método conocido
como navegación por estima con el fin de proporcionar un ángulo de partida sin errores
de acumulación durante el desplazamiento del vehículo. El tercero es un sensor
ultrasónico para evitar obstáculos, el cual se subdivide en seis sensores de sonar (o
ultra sensores sónicos) para evitar obstáculos. Si uno de los sensores de sonar lee un
objeto que está más cerca de 30 cm, el robot de transporte se detiene temporalmente.
Con dicho prototipo los autores concluyeron que para describir un sistema de
navegación el uso de sensores resulta altamente útil y eficaz [9], dejando ver su
viabilidad frente a la determinación de trayectorias utilizando sistemas de
posicionamiento global (GPS) el cual no es de mayor complejidad y no es objeto de
estudio.
Uno de los principales desafíos con vehículos no tripulados móviles es su localización y
posicionamiento en ambientes interiores. La solución a dicho problema fue dada en
6
IDMEC/IST, Institute of Mechanical Engineering, situado en Lisboa, Portugal, en donde
se desarrolló un sistema en el cual se consideró que la navegación y los cambios de
posicionamiento en un UGV no debían representar grandes problemas. El sistema se
aventaja en la manera en que el robot es capaz de encontrar su posición sin necesidad
de cables a tierra, puntos de referencia o láser balizas. El robot utiliza imágenes
obtenidas desde su techo para calcular su posición y navegar entre las coordenadas.
Como se dijo anteriormente, la principal contribución es la ausencia de servicios
externos para resolver en el AGV tal problema de localización, lo que permite la rápida
configuración. El desarrollo del trabajo lo basaron en la metodología de la utilización de
mosaicos visuales para construir simultáneamente un mapa y estimar la posición. Para
lograr ese objetivo les fue necesario superar los tres pasos siguientes: la cartografía o
visión general del medio, la localización y la navegación.
La localización del robot la realizaron suponiendo que el robot está en el centro de la
imagen. En realidad, en los ambientes interiores, los autores utilizaron un robot con una
cámara apuntando hacia el techo. Prestando atención al hecho de que el robot navega
en el suelo, se planificó la posición del robot la cual corresponde al centro de la imagen
actual en el mapa global construido iterativamente. La orientación de la cámara es
similar a la minerva robot [10], donde la cámara también está apuntando al techo con el
fin de alcanzar los mejores resultados. Mediante programación en Matlab®, se
procesaron imágenes y videos para la obtención de un mosaico general, el cual les
permitió crear el mapa del entorno en el que el robot opera y desarrolla su navegación
y desplazamiento [11].
Así mismo, los estudiantes de la University of Tokyo, en Tokyo, Japón, desarrollaron un
sistema de localización de navegación de un vehículo agrícola muy similar al GPS, pero
con la ventaja que sirve tanto en lugares exteriores como en interiores. Al usarlo en un
campo agrícola tienen la ventaja de que es un entorno fijo, es decir, sus áreas de trabajo
no cambian, por lo tanto se pueden configurar unos puntos de referencia en las esquinas
del campo.
Así, el sistema está constituido por un robot móvil que está equipado con una cámara
omnidireccional (proporcionan una vista de 360 grados) que suministra información
suficiente, un procesador de imagen, cuatro puntos de referencia y un computador. El
sensor de visión detecta los puntos de referencia y se los envía al PC para que el
determine la posición absoluta de la cámara y así del vehículo. Con una posible
aplicación en cualquier área de trabajo como en la planificación de una ruta y además
con capacidad de evitar obstáculos satisfactoriamente [12]. Este sistema es más
económico que un sistema de GPS, además es muy eficaz gracias a su pequeño margen
de error.
En el 2011, se realizó un sistema en el cual se controlan y se coordinan remotamente
varios robots unos detrás de otros, parecido a un enjambre. Esto lo desarrollo la
University of Patras, en Rio, Grecia, y se basaron en el control del error dinámico, que
es el encargado de controlar la trayectoria de cada robot. Para demostrar el sistema
7
usaron los kits educativos de los Lego Mindstorms® NXT, que fueron controlados desde
una estación base remota de red inalámbrica con múltiples canales bluetooth.
Para comenzar, partieron del problema simple que era un enjambre de dos robots uno
líder y otro seguidor, en el cual cada robot del enjambre se modela como un vehículo no
holonómico (ya que no es capaz de cambiar su dirección instantáneamente, sino que
tiene que realizar varias maniobras previas para desplazarse en el sentido lateral).
Luego, tomaron en cuenta el error dinámico basado en el error de la trayectoria del
vehículo líder, logrando así, con un algoritmo reducir los errores de desviación y obtener
un seguimiento de la trayectoria con una precisión aceptable. Con esto, la trayectoria
del robot líder será la señal de referencia del vehículo seguidor y tendrá un error de
desviación mucho mayor, por lo tanto, se usan distintos parámetros y se aumenta o se
disminuye la velocidad de los seguidores para reducir al mínimo los errores de
trayectoria [13].
Un aporte muy importante en el sistema de visión (cámaras panorámicas) de los
vehículos no tripulados se puede demostrar en el trabajo realizado en Fraunhofer
Institute for Intelligent Analysis and InformationSystems (IAIS), St. Augustin, Alemania,
donde se evidencia el interés en aumentar la seguridad y la eficiencia en el control de
vehículos autónomos, sobre todo en las tareas de inspección y operaciones de rescate,
las cuales conllevan a una interacción hombre-máquina muy eficaz y que requiere de un
fácil manejo. Los autores llegaron a la conclusión de que la percepción del medio
ambiente representa un problema fundamental en el campo de visión para un vehículo
no tripulado, por tanto, el uso de sistemas de visión ofrecen un panorama general del
paisaje, los cuales proporcionan información visual para el control y desplazamiento de
los vehículos no tripulados [14]. Al final demostraron que con los sistemas de visión se
pueden construir mapas en línea y conociendo la información espacial y sus
características, éstas se transformarán en puntos de referencia los cuales representarán
un mapa del medio donde dichos vehículos se desplazarán.
Siguiendo la misma tónica y ahora poniendo en consideración la situación de los
estudios de vehículos no tripulados en la industria nacional, se deja entrever a
continuación el uso de estos dispositivos como apoyo y refuerzo para las actividades de
las Fuerzas Militares de Colombia en su lucha contra el terrorismo, en particular la
Fuerza Aérea de Colombia pues se utilizan vehículos no tripulados de tipo aéreo.
Los aviones no tripulados se utilizaron en Colombia para detectar movimientos de las
FARC y cargamentos de drogas al menos desde el 2006, según un cable de WikiLeaks®
divulgado por el diario El Espectador y la revista Semana. Los equipos usados en el país
en esa ocasión, según describe el cable, eran ScanEagle® con capacidad de trasmitir
en tiempo real imágenes mientras sobrevuela su objetivo.
Con apenas 1,2 m de largo y 3 m de extensión de sus alas, el modelo usado en Colombia
era demasiado pequeño para ser visto o escuchado al volar por encima de los 3.000
8
pies, sin embargo, el zoom de su cámara a esa altura divisa con claridad vehículos y
estructuras en tierra. Ese modelo sería al parecer uno desarrollado por la compañía
aeronáutica estadounidense Boeing.
El cable agregó que consideraba que esos modelos eran de costos bajos de operación
porque el UAV, con unos 39 kg de peso, podía volar 15 horas continuas con apenas 5,5
litros de combustible y es operado desde tierra con un control manual remoto y un
teclado [15].
Además, para llevar a cabo nuestro proyecto vamos a usar unos vehículos Lego
Mindstorm® que tiene disponible la Universidad, y para obtener unos óptimos resultados
necesitamos aprender a manejarlos. Un miembro de la IEEE, realizó tres laboratorios
[16] acerca de los sistemas de control, basándose en los vehículos Lego Mindstorm®,
ya que son unos robots relativamente económicos y con la característica que presenta
una interfaz por cable o inalámbrico entre el PC y los distintos componentes del vehículo,
presentando así una interacción en tiempo real entre el sistema y el software. Los tres
laboratorios diseñados son: el primero es un modelado experimental del sistema físico,
es decir, del sistema motor Lego; el segundo es el diseño de control del sistema físico;
y el tercero es el control del estado-espacio y el diseño de los cálculos para el sistema
físico. Además unos estudiantes de la University of Central Florida, en Orlando,
implementaron una teoría de control de PID (Proporcional Integral Derivativo-
Mecanismo de control por retroalimentación) básico en el NXT (Lego Mindstorm®) a
través de una interfaz gráfica usando Ni Labview®
[17].
En este contexto cabe anotar como ítems importantes: en primer lugar que estos
estudios referenciados en cuanto a control y desplazamiento de vehículos no tripulados
y sus diversas aplicaciones han ido en gran aumento durante los últimos años,
especialmente en países industrializados donde se ha demostrado el gran potencial útil
que se puede obtener de la utilización de dichos vehículos, y sin embargo aplicaciones
de este tipo abordadas en nuestro panorama nacional aún son muy escasas y poco
productivas, evidenciando que hay gran viabilidad en el desarrollo en estos campos de
la tecnología en los cuales se puede explorar, con un alto grado la posibilidad de obtener
resultados satisfactorios e innovadores; y en segundo lugar, se deja a luz visible, como
consecuencia de estudios y trabajos ya realizados en el exterior, la posibilidad de
desarrollar sistemas de control y desplazamiento fáciles y de bajos costos, lo cual sería
de gran utilidad poder llevar la aplicación a la industria de una manera eficiente y
económica, lo que nos deja una interesante aplicación enfocada en el desarrollo del
control y desplazamiento de vehículos no tripulados, especialmente en los Lego
Mindstorms®.
Otro ejemplo que se puede analizar para nuestra investigación es lo realizado por unos
estudiantes de ingeniería electrónica de la Universidad Técnica Checa en Praga, donde
utilizando un vehículo LEGO MINDSTORMS NXT que debía ser capaz de seguir una
línea recta marcada en el suelo y al mismo tiempo medir la distancia con el vehículo en
frente de ella, describieron el modelo de la dinámica de un pelotón de vehículos. Los
vehículos lograron esto de la siguiente manera: Un sensor mide la luz reflejada por el
9
piso hasta un nuevo sensor, lo que le da al vehículo una capacidad de viajar a lo largo
de una línea recta. El vehículo está impulsado por dos motores NXT, estos dos motores
son controlados individualmente, lo que permite hacer pequeños ajustes en la dirección
del movimiento del vehículo, mediante el control de los voltajes aplicados a ellos. Un
codificador óptico rotativo está construido en el motor NXT, que proporciona la velocidad
real del motor. Todo el vehículo es propulsado por una batería recargable de 9V.
La comunicación entre vehículos se realiza mediante la tecnología Bluetooth. El ladrillo
NXT contiene un chip de CSR BlueCoreTM4 permitiendo que el ladrillo para conectar
hasta tres dispositivos Bluetooth en una piconet. Hay una limitación tecnológica de
Bluetooth que permite que sólo 7 esclavos para ser conectados a un maestro en una
piconet. Por lo tanto, la difusión por el líder de todos los demás vehículos a la vez es
imposible. La comunicación en el pelotón se realiza como una interconexión en cadena
de pico redes, cada vehículo está conectado a la parte delantera del vehículo como un
esclavo y el vehículo siguiente como un maestro. Al comienzo de cada transmisión de
datos, un número de control que se envía asegura que el receptor es informado que la
transmisión anterior a acabado [18].
Por último, resulta necesario resaltar que este proyecto es la continuación de un trabajo
realizado por unos estudiantes de Tecnología Mecánica de la Universidad Distrital, en
el cual buscaban mejorar el proceso de la celda de manufactura flexible HAS 200, ellos
desarrollaron su proyecto usando el Kit de robótica educacional de Lego® Mindstorm®
NXT, constituyeron la comunicación entre el vehículo NXT y el PC vía inalámbrica a
través de Bluetooth, estableciendo una conexión maestro (PC) y esclavo (Vehículo). En
este proyecto se utilizó un sistema de visión artificial que consiste en analizar un área
determinada, donde se detectan los elementos a considerar como son los puntos de
paradas, el vehículo NXT y el objeto como obstáculo.
La representación del entorno de navegación del vehículo NXT se basó en el medio
altamente automatizado FMS HAS 200® que permite reproducir y emular el
funcionamiento de una fábrica real, cada estación integra un tramo de cinta
transportadora, lo que permite una gran flexibilidad en la conexión entre estaciones. La
cinta funciona en un solo sentido y sin la posibilidad de omitir una estación durante el
trayecto, lo que genero la necesidad de este proyecto, pues se buscaba que la FMS
HAS 200 fuera capaz de saltar a cualquier estación (usando el algoritmo de
programación) sin tener que seguir la secuencia estándar (sentido horario).
En el entorno de navegación se establecieron puntos específicos, éstos hacen referencia
a la zona de llegada de un producto en cada una de las estaciones de la FMS HAS
200®. Estos puntos se utilizan como origen y destino principal del vehículo NXT, las
imágenes se obtienen por medio de un dispositivo de captación de imagen, en este caso
una cámara USB web.
A partir de la necesidad de interactuar en tiempo real el sensor de visión y el vehículo
NXT, se realizó el procesamiento de la imagen mediante el software VBAI®. Además, el
control del vehículo NXT y la interfaz de usuario se realizan mediante el software
LabVIEW® 2011.
10
Una vez que el vehículo NXT encuentra el obstáculo no tiene la posibilidad de evadirlo,
ya que las acciones que se programaron no permiten que el vehículo sepa en qué
dirección se encuentra el obstáculo, por lo tanto, se decide que se detengan los motores
si el obstáculo se encuentra dentro de los límites establecidos.
Como vemos este trabajo hace un primer acercamiento a la visión artificial y a los
vehículos Lego®, abordando la metodología que se necesita para implementar un
sistema automatizado de visión artificial para el control de vehículos no tripulados, pero
queda entredicho que aún falta mucho camino por recorrer [19].
3. OBJETIVOS
3.1. OBJETIVO GENERAL
Implementar un sistema automatizado de visión artificial para el control simultáneo de
tres prototipos de vehículos terrestres no tripulados.
3.2. OBJETIVOS ESPECIFICOS
• Definir la mejor alternativa entre las plataformas móviles existentes en la UD.
• Reconocer tecnológica y operativamente la plataforma móvil seleccionada.
• Evaluar los distintos medios de transmisión de información existentes para vehículos
no tripulados.
11
• Seleccionar el sistema de visión artificial acorde a las condiciones de trabajo.
• Implementar la plataforma de comunicación para la totalidad de los componentes del
sistema.
• Programar el (los) algoritmo(s) de control requerido(s) para el funcionamiento del
sistema.
• Implementar el sistema de control por visión para mínimo tres prototipos de
vehículos no tripulados.
• Adelantar el correspondiente análisis financiero del proyecto.
4. PROCESOS DE AUTOMATIZACIÓN
Un proceso de automatización se puede definir como una serie de acciones sucesivas
que dan lugar a una secuencia continua, y en esta la mano del hombre no está
involucrada. Los procesos de automatización son cada vez más comunes en la vida
cotidiana, razón que ha llevado a generar controversia en que tan positiva es, pues estos
han llevado a grandes adelantos que han mejorado el estilo de vida del hombre, pero a
su vez, genera gran desempleo, puesto que, las maquinas pasan a hacer el trabajo que
antes hacían las personas.
La automatización se ve principalmente relacionada con las industrias manufactureras y
de procesos. La industria manufacturera se caracteriza por sus máquinas movidas por
control numérico ayudadas por un ordenador como núcleo de sistema de fabricación
flexible. En esta industria se evidencia el uso de estaciones robotizadas que permiten
gran calidad en un entorno competitivo. El principal reto que afronta la automatización
en este tipo de industria es establecer tareas a las máquinas, disposición de la planta,
sistemas flexibles que fabriquen diferentes productos, etc. Para la industria de procesos,
12
como la cementera, farmacéutica, entre otras. En estas industrias se destacan las
aplicaciones de logaritmos de control avanzado, o la formación de operarios expertos
en las salas de control mediante simuladores. Cabe destacar, que tanto la industria
manufacturera, como la industria de procesos realizan grandes esfuerzos en la
optimización del proceso, ya sea, para mejorar la calidad o tratando de reducir costos
(Ponsa & Granollers, 2015).
4.1. CELDAS DE MANUFACTURA FLEXIBLE (FMC)
Las celdas de manufactura flexible corresponden a un conjunto de componentes
electromecánicos, que trabajan de manera coordinada para conseguir la fabricación en
serie de un producto. El término flexible se refiere a que la celda no está restringida a
solo un tipo de proceso, sino que puede acomodarse fácilmente a cualquier producto,
usualmente con productos de las mismas características físicas y dimensionales.
Los beneficios de una FMC son muchos, como el control de la producción que se puede
hacer, la reducción en el tiempo del proceso y evitar el movimiento innecesario de la
materia prima. [20]
4.2. VISIÓN ARTIFICIAL
Se puede definir la “Visión Artificial” como un campo de la “Inteligencia Artificial” que,
mediante la utilización de las técnicas adecuadas, permite la obtención, procesamiento
y análisis de cualquier tipo de información especial obtenida a través de imágenes
digitales
La visión artificial la componen un conjunto de procesos destinados a realizar el análisis
de imágenes. Estos procesos son: captación de imágenes, memorización de la
información, procesado e interpretación de los resultados.
Con la visión artificial se pueden:
• Automatizar tareas repetitivas de inspección realizadas por operadores.
• Realizar controles de calidad de productos que no era posible verificar por
métodos tradicionales.
• Realizar inspecciones de objetos sin contacto físico.
• Realizar la inspección del 100% de la producción (calidad total) a gran velocidad.
• Reducir el tiempo de ciclo en procesos automatizados.
• Realizar inspecciones en procesos donde existe diversidad de piezas con
cambios frecuentes de producción.
Las principales aplicaciones de la visión artificial en la industria actual son:
• Identificación e inspección de objetos.
• Determinación de la posición de los objetos en el espacio.
13
• Establecimiento de relaciones espaciales entre varios objetos (guiado de robots)
• Determinación de las coordenadas importantes de un objeto.
• Realización de mediciones angulares. Mediciones tridimensionales.
4.2.1. MÉTODOS DE CAPTACIÓN DE LAS IMÁGENES.
4.2.1.1 DIGITAL.
La función obtenida tras el resultado de la medida o muestreos realizados a intervalos
de tiempo espaciados regularmente, siendo el valor de dicha función un número positivo
y entero. Los valores que esta función toma en cada punto dependen del brillo que
presenta en esos puntos la imagen original.
Píxel
Una imagen digital se considera como una cuadrícula. Cada elemento de esa cuadrícula
se llama Píxel. La resolución estándar de una imagen digital se puede considerar de
512x484 Pixel.
Nivel de grises
Cuando una imagen es digitalizada, la intensidad del brillo en la escena original
correspondiente a cada punto es cuantificada, dando lugar a un número denominado
“nivel de gris”.
Imagen binaria
Es aquella que sólo tiene dos niveles de gris: negro y blanco. Cada píxel se convierte en
negro o blanco en función del llamado nivel binario o UMBRAL.
Escena
Es un área de memoria donde se guardan todos los parámetros referentes a la
inspección de un objeto en particular: Cámara utilizada, imágenes patrón memorizadas,
tolerancias, datos a visualizar, entradas y salidas de control, etc.
Window (ventana de medida)
Es el área específica de la imagen recogida que se quiere inspeccionar.
14
4.2.2. CAMARAS
Su función es capturar la imagen proyectada en el sensor, para poder transferirla a un
sistema electrónico. Las cámaras utilizadas en visión artificial requieren de una serie de
características que permitan el control del disparo de la cámara para capturar piezas
que pasan por delante de ella en la posición requerida. Son más sofisticadas que las
cámaras convencionales, ya que tienen que poder realizar un control completo de:
tiempos, señales, velocidad de obturación, sensibilidad, etc.
4.2.2.1 CÁMARAS LINEALES
Construyen la imagen línea a línea realizando un barrido del objeto junto con un
desplazamiento longitudinal del mismo. Las cámaras lineales utilizan sensores que
tienen entre los 512 y 8192 pixeles, con una longitud lo más corta posible y gran calidad
de imagen. El hecho de construir imágenes de alta calidad a partir de líneas individuales,
requiere de una alta precisión. La alineación y el sincronismo del sistema son críticos si
se quiere obtener una imagen precisa del objeto a analizar.
Su utilización está muy extendida para la inspección de objetos de longitud
indeterminada, tipo telas, papel, vidrio, planchas de metal, etc.
Características técnicas:
Velocidad
Número de pixeles capaces de ser leídos por unidad de tiempo. En las cámaras lineales
es un valor mucho más alto que en las matriciales. En las cámaras de última generación
se alcanzan velocidades superiores a los 200 MHz.
4.2.2.2 CÁMARAS MATRICIALES
El sensor cubre un área que está formada por una matriz de pixels. Los sensores de las
cámaras modernas son todos de tecnología CCD formados por miles de diodos
fotosensibles posicionados de forma muy precisa en la matriz.
El tamaño de los CCD está definido en pulgadas, sin embargo su tamaño real no tiene
nada que ver con su valor en pulgadas, sino que están basados en la relación de los
primeros con el tamaño de los tubos Vidicon. Formatos habituales son 1/3”,1/2” y 2/3”.
15
Características de los sensores:
Factor de relleno.
Porcentaje del área de píxel que es sensible a la luz, el ideal es el 100%, porcentaje
imposible de obtener por la separación entre los registros.
Tipo de transferencia.
Según la forma de transferencia de la información.
Transferencia Inter-línea (ITL)
Son los más comunes, utilizan registros de desplazamiento situados entre las líneas de
píxel para almacenar y transferir los datos de la imagen lo que permite una alta velocidad
de obturación. Transferencia de cuadro
Disponen de un área dedicada al almacenamiento de la luz, la cual está separada del
área activa, esto permite un mayor factor de relleno aunque se pierde velocidad de
obturación.
Cuadro entero
Son los de arquitectura más simple, emplean un registro paralelo para exposición de los
fotones, integración de la carga y transporte de la misma, alcanzando con este sistema
factores de relleno del 100%.
4.2.2.3 CÁMARAS A COLOR
Aunque el proceso de obtención de las imágenes es más complejo, proporcionan una
mayor información que las monocromo.
Cámara a color 1CCD
Incorporan un sensor con filtro en forma de mosaico, con los colores primarios RGB
(filtro bayer), observar en la figura como hay el doble de pixeles de color verde para así
asemejar la percepción del sensor al ojo humano. Debido al carácter del filtro, bien en
el interior de la cámara, o bien en un ordenador, se realizan los cálculos necesarios para
obtener en tiempo real una señal analógica o digital en RGB.
Cámara color 3CCD
16
Incorporan un prisma y tres sensores, la luz procedente del objeto pasa a través de la
óptica y se divide en tres direcciones al llegar al prisma. En cada una de los tres
extremos del prisma se encuentra un filtro de color (rojo, verde y azul) y un sensor que
captura la luz de cada color que viene del exterior. Internamente la cámara combina los
colores y genera una señal RGB similar a la que ve el ojo humano. Aunque la calidad
de las imágenes de este tipo de cámaras respecto de las de 1CCD es muy superior,
tienen dos inconvenientes a tener en cuenta: la necesidad de una mejor iluminación para
compensar el efecto producido por el prisma y el efecto de aberración cromática que se
crea por la propia estructura del sistema que se subsana colocando las ópticas
adecuadas para este tipo de cámaras.
4.2.3. OPTICAS
Las ópticas se utilizan para transmitir la luz al sensor de la Cámara de una forma
controlada para poder obtener una imagen enfocada de uno o varios objetos. En los
sistemas de visión artificial es necesario utilizar ópticas de calidad para tener la mejor
imagen posible y permitir las medidas con la mayor precisión.
4.2.4. ILUMINACIÓN
La iluminación es la parte más crítica dentro de un sistema de visión. Las cámaras
capturan la luz reflejada de los objetos. El propósito de la iluminación utilizada en las
aplicaciones de visión es controlar la forma en que la cámara va a ver el objeto. La luz
se refleja de forma distinta si se ilumina una bola de acero, que si se ilumina una hoja
de papel blanco y el sistema de iluminación por tanto debe ajustarse al objeto a iluminar.
[21]
Hay un cierto número de consideraciones a tener en cuenta para determinar la mejor
iluminación para una aplicación:
• ¿Es en color o en monocromo?
• ¿Es de alta velocidad o no?
• ¿Cuál es el campo de visión a iluminar?
• ¿El objeto presenta superficies con reflejos?
• ¿Qué fondo presenta la aplicación: color, geometría, etc.?
• ¿Cuál es la característica a resaltar?
• ¿Qué duración debe tener el sistema de iluminación?
• ¿Qué requisitos mecánicos, ambientales, deben considerarse?
La respuesta a estas preguntas dará el tipo de iluminación a utilizar, para lo que se
tendrá en cuenta:
• Intensidad de luz necesaria
17
• Longitud de onda adecuada
• Superficie a iluminar
• Reflectividad del objeto
• Color del objeto
• Espacio disponible
• Tipo de cámara utilizada
5. SELECCIÓN DE HERRAMIENTAS PARA EL DESARROLLO DEL
PROYECTO
5.1. NI LABVIEW
LabVIEW es un entorno de desarrollo diseñado específicamente para acelerar la
productividad de ingenieros y científicos. Con una sintaxis de programación gráfica que
facilita visualizar, crear y codificar sistemas de ingeniería, LabVIEW es incomparable en
ayudar a ingenieros a convertir sus ideas en realidad, reducir tiempos de pruebas y
ofrecer análisis de negocio basado en datos recolectados. Desde desarrollar máquinas
inteligentes hasta garantizar la calidad de los dispositivos conectados.
5.2. NI VISION BUILER
Vision Builder for Automatic Inspecction es un software de Vision Interactivo y
configurable, con una gran variedad de herramientas, como por ejemplo detección,
medición, identificación y clasificación de objetos, lo cual resulto muy útil para este
proyecto. [22]
5.3. KIT LEGO MINDSTORM NXT
El Kit lego Mindstorm NXT permite construir un robot uniendo piezas y programando las
acciones de las mismas. El principal motivo de utilizar esta plataforma son las ventajas
que ofrece siendo fácil de controlar tanto su parte mecánica como electrónica.
El NXT 2.0 cuenta con una mini- computadora o ladrillo con capacidad de
almacenamiento en RAM de 64 Kb, este ladrillo incluye cuatro puertos de entrada en los
que se conectan los sensores y tres puertos de salida en los que se conectan los
motores. Los motores cuentan con un sensor de rotación que permite movimientos
precisos y controlados, así como una sincronización en el tiempo de la ejecución de una
acción con otros motores. [23]
En la Tabla 1 se presenta un resumen detallado de las características técnicas del Kit
LEGO Mindstorms NXT.
NXT

18
Procesador Atmel 32-Bit - ARM7 48 MHz, 256KB flash,
64 KB RAM
Sistema operativo Propietario
Puertos 3 puertos para motores
4 puertos para sensores
Comunicación USB 12 Mbps
Bluetooth
Comunicación con
móviles inteligentes
dispositivos Android
Pantalla LCD monocromática, 100 x 64 pixeles
Otras características. Co-procesador Atmel 8-Bit AVR 8MHz,
4KB flash, 512 Byte RAM.
Tabla 1. Características técnicas Lego NXT, tomada de [23]
Figura 1. Kit Lego Mindstorn NXT 2.0, tomada de [24]
De los sensores que proporciona el kit Lego (luz, contacto, sonido y ultrasonido)
únicamente se le da uso al sensor interno que poseen los servomotores que miden la
rotación.
En cuanto a los servomotores, con el uso de dos es suficiente, el motor B y el motor C.
Se utiliza una tercera rueda como apoyo siguiendo el diseño principal del kit (Figura 2).
19
Figura 2. Estructura Vehículo Lego 2.0, fuente autores
La comunicación con el vehículo NXT se puede dar de tres maneras, la primera es por
medio de los cuatro botones que posee, que se no era viable para el proyecto. la
segunda es utilizando un cable USB, esta alternativa fue considerada, pero se descartó
por la dificultad que genera tener un cable conectado al vehículo cuando está
moviéndose en el entorno. Y una tercera que es por medio de bluetooth, en donde sólo
pueden estar conectados un máximo de tres equipos, esta alternativa resulto ser la
mejor, puesto que, LabVIEW® cuenta con esta opción de transmisión (Tello Leal,
Guerrero Melendez, & Saldivar Alonso, 2013).
5.4. CÁMARA
La cámara utilizada en el presente proyecto es de tipo web con interfaz USB, marca
Microsoft, modelo AV-1000 (Figura 3). Esta cámara posee un sensor de tipo CMOS que
le permite a la cámara tener una mayor sensibilidad a la luz, esto favorece las
condiciones de iluminación del entorno de navegación que se representa, ya que en el
ambiente de trabajo la iluminación presente es de tipo fluorescente [25]. La cámara está
ubicada a una altura de aproximadamente 2m.

20
Figura 3. Cámara Microsoft AV-1000, tomada de [25]
Las características de la cámara se muestran en la Tabla 2.
Características
Captura de
imágenes fijas
0.35 M pixel
Interface USB 2.0
Formato de video 32 bit
Sensor CMOS
Resolución máxima 640*480(VGA)
Captura de video Hasta 30 fpm (VGA)
Ángulo de rotación 55 grados
Tabla 2. Características Técnicas Microsoft LiveCam AV-1000, tomada de [25]
6. DESARROLLO DEL PROYECTO
Para la elaboración del proyecto fue necesario contar con un entorno controlado, ya que
la luz resulta ser un gran problema al momento de manipular las imágenes. Se
seleccionaron cuatro puntos de referencia que asemejan de forma didáctica una celda
de manufactura flexible.
Todo el desarrollo del proyecto se va a explicar claramente a continuación:
21
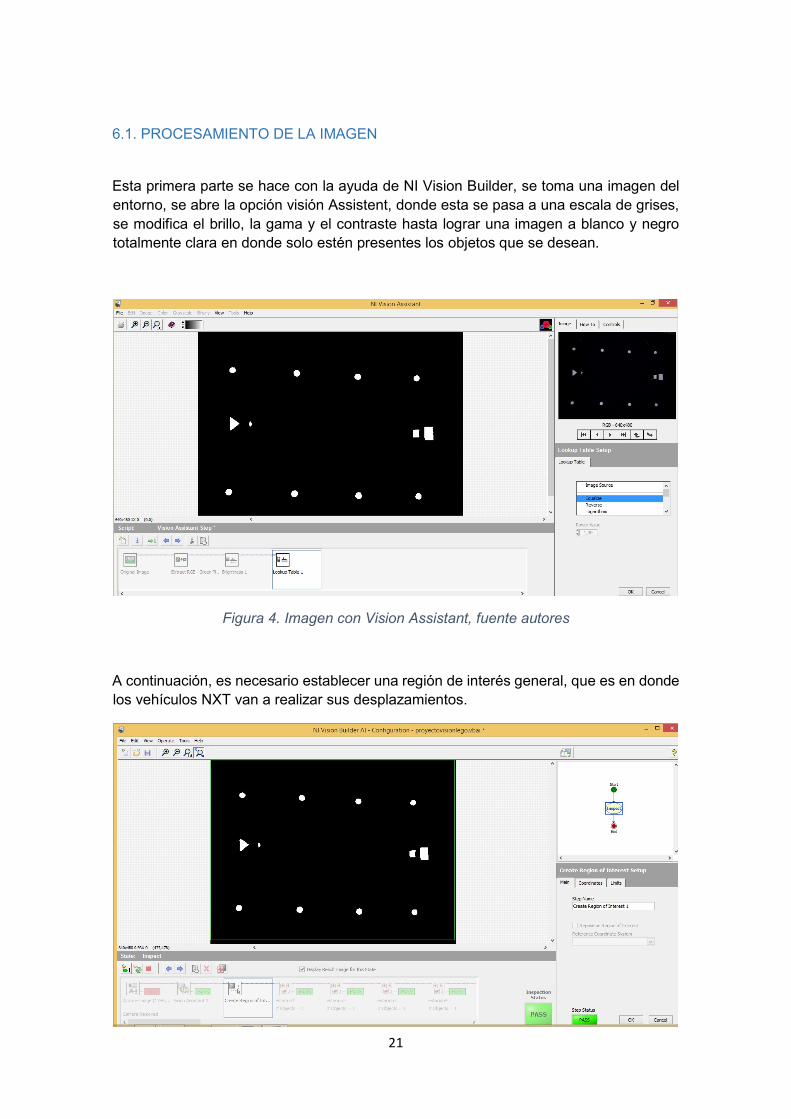
6.1. PROCESAMIENTO DE LA IMAGEN
Esta primera parte se hace con la ayuda de NI Vision Builder, se toma una imagen del
entorno, se abre la opción visión Assistent, donde esta se pasa a una escala de grises,
se modifica el brillo, la gama y el contraste hasta lograr una imagen a blanco y negro
totalmente clara en donde solo estén presentes los objetos que se desean.
Figura 4. Imagen con Vision Assistant, fuente autores
A continuación, es necesario establecer una región de interés general, que es en donde
los vehículos NXT van a realizar sus desplazamientos.
22
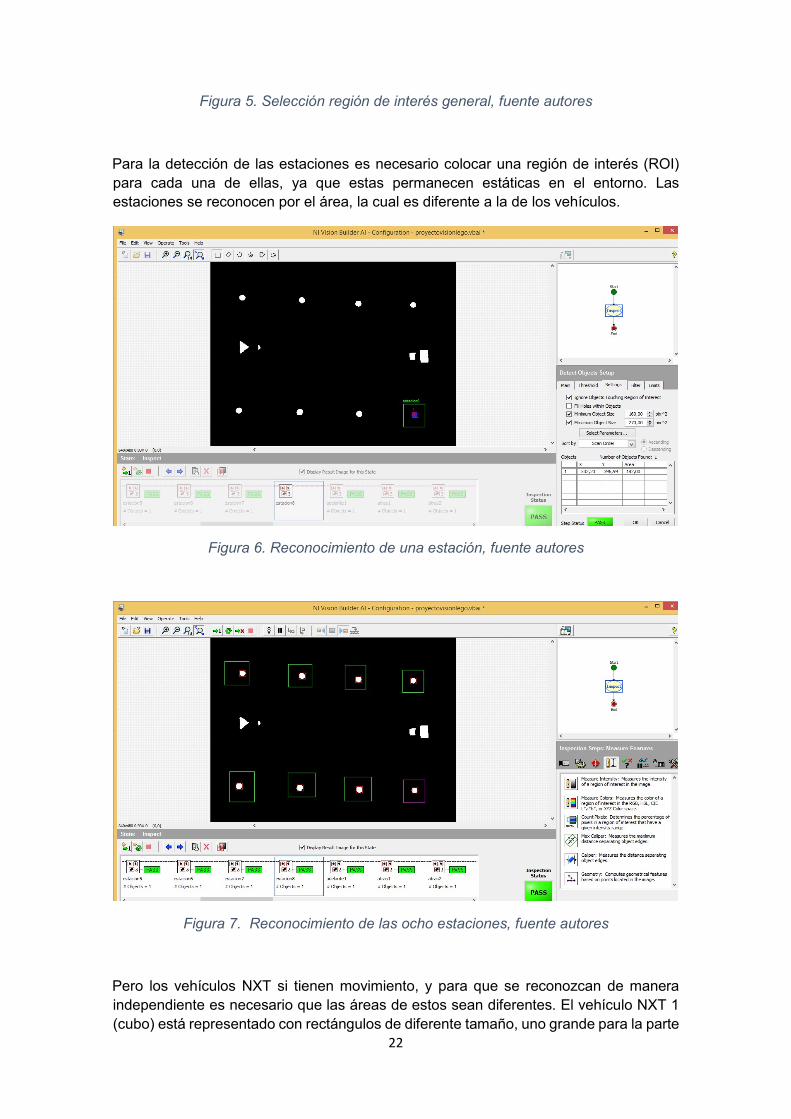
Figura 5. Selección región de interés general, fuente autores
Para la detección de las estaciones es necesario colocar una región de interés (ROI)
para cada una de ellas, ya que estas permanecen estáticas en el entorno. Las
estaciones se reconocen por el área, la cual es diferente a la de los vehículos.
Figura 6. Reconocimiento de una estación, fuente autores
Figura 7. Reconocimiento de las ocho estaciones, fuente autores
Pero los vehículos NXT si tienen movimiento, y para que se reconozcan de manera
independiente es necesario que las áreas de estos sean diferentes. El vehículo NXT 1
(cubo) está representado con rectángulos de diferente tamaño, uno grande para la parte
23
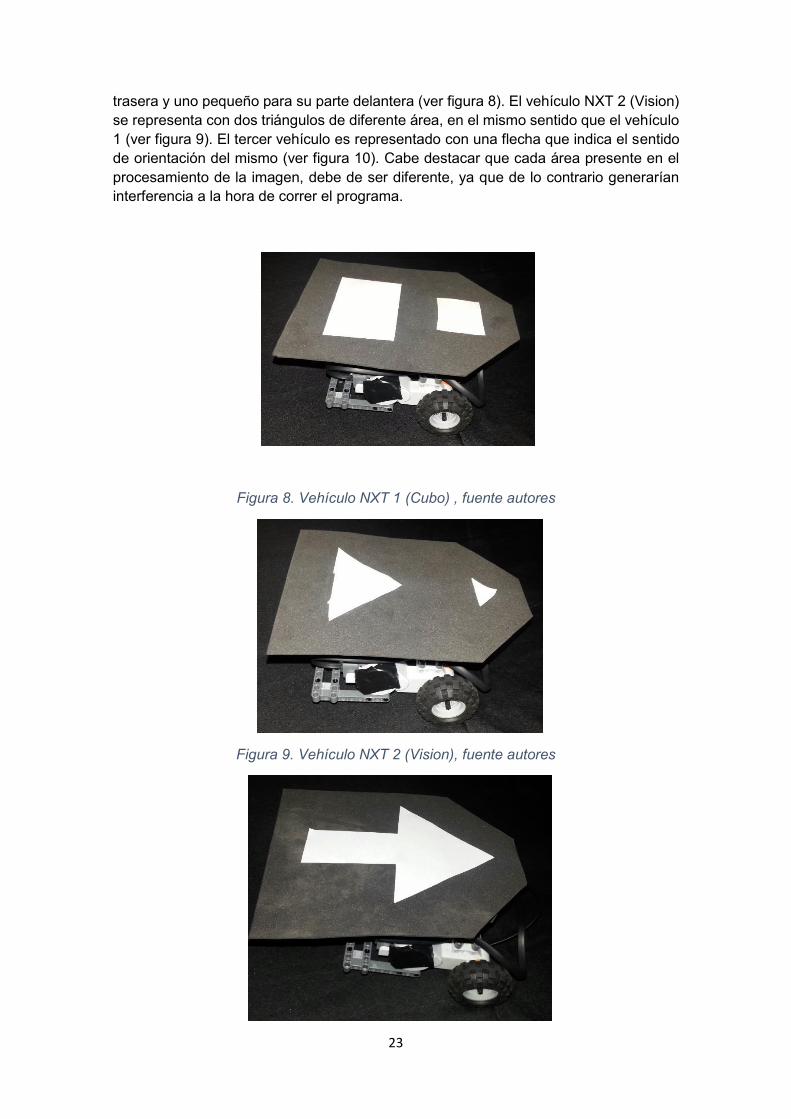
trasera y uno pequeño para su parte delantera (ver figura 8). El vehículo NXT 2 (Vision)
se representa con dos triángulos de diferente área, en el mismo sentido que el vehículo
1 (ver figura 9). El tercer vehículo es representado con una flecha que indica el sentido
de orientación del mismo (ver figura 10). Cabe destacar que cada área presente en el
procesamiento de la imagen, debe de ser diferente, ya que de lo contrario generarían
interferencia a la hora de correr el programa.
Figura 8. Vehículo NXT 1 (Cubo) , fuente autores
Figura 9. Vehículo NXT 2 (Vision), fuente autores
24
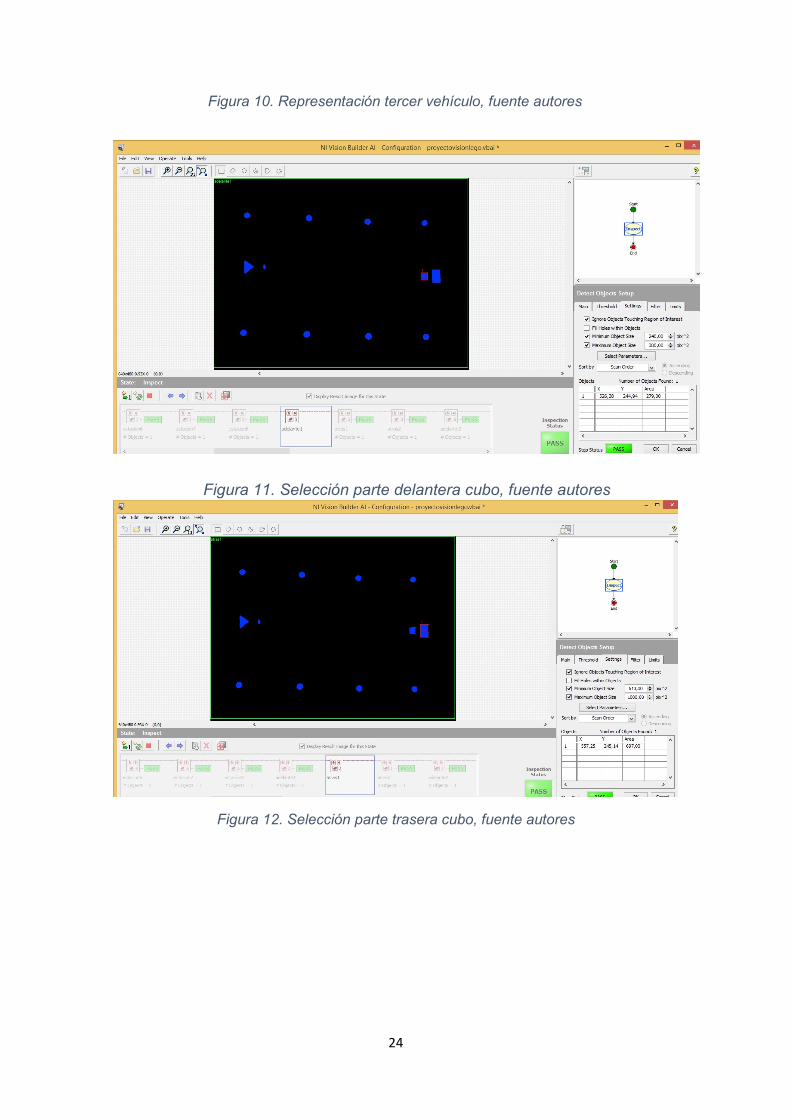
Figura 10. Representación tercer vehículo, fuente autores
Figura 11. Selección parte delantera cubo, fuente autores
Figura 12. Selección parte trasera cubo, fuente autores
25
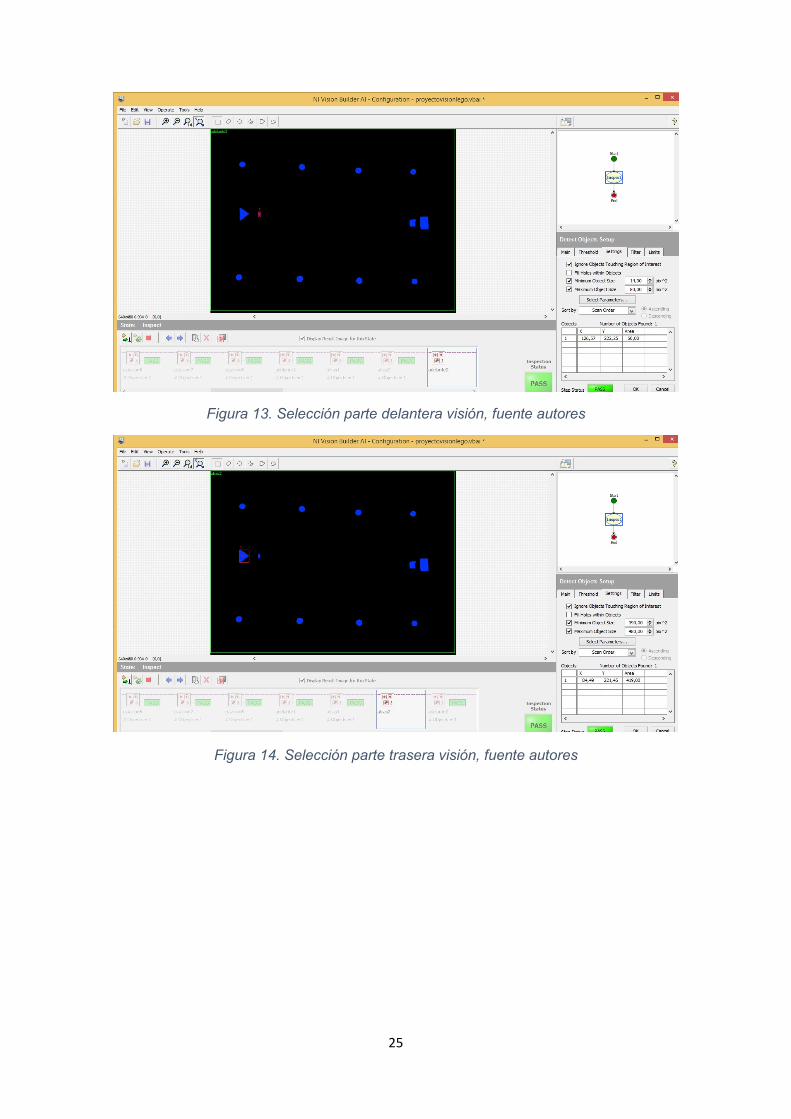
Figura 13. Selección parte delantera visión, fuente autores
Figura 14. Selección parte trasera visión, fuente autores

26
Figura 15. Selección tercer vehículo, fuente autores
6.2. POSICIÓN DE LOS VEHICULOS DENTRO DEL ENTORNO
Inicialmente se toma la distancia que hay entre las partes delanteras de los vehículos
NXT, para esto se utiliza una opción del Vision Builder llamada “Geometry”, en esta se
usa la herramienta distancia.
Figura 16. Distancia entre frentes, fuente autores
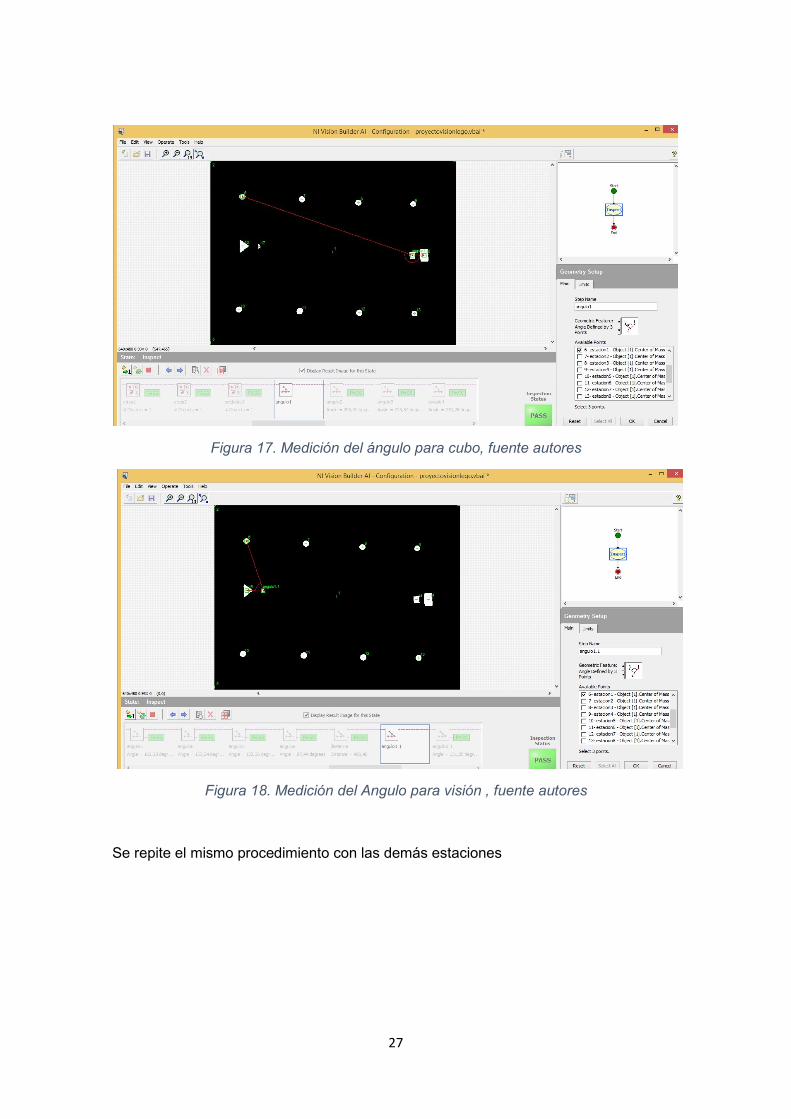
Ahora es necesario definir la orientación de los vehículos NXT respecto a la estación,
para esto se utiliza la opción medir ángulo con tres puntos.
27
Figura 17. Medición del ángulo para cubo, fuente autores
Figura 18. Medición del Angulo para visión , fuente autores
Se repite el mismo procedimiento con las demás estaciones
28
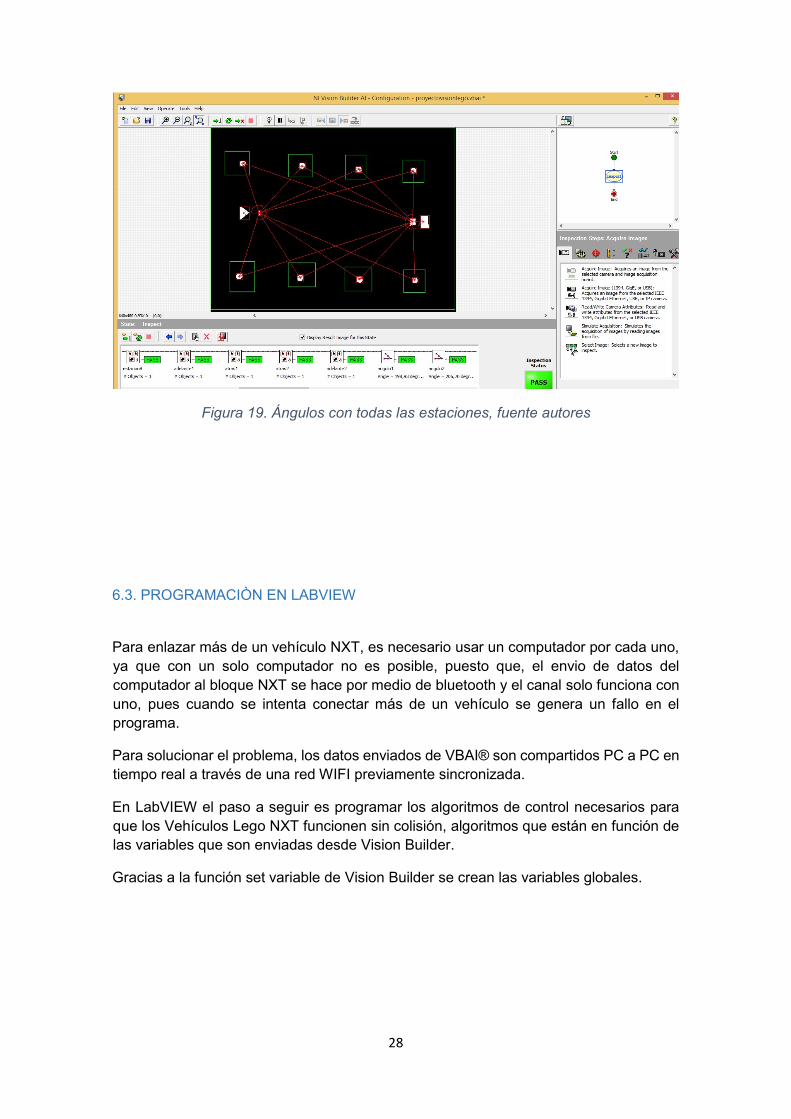
Figura 19. Ángulos con todas las estaciones, fuente autores
6.3. PROGRAMACIÒN EN LABVIEW
Para enlazar más de un vehículo NXT, es necesario usar un computador por cada uno,
ya que con un solo computador no es posible, puesto que, el envio de datos del
computador al bloque NXT se hace por medio de bluetooth y el canal solo funciona con
uno, pues cuando se intenta conectar más de un vehículo se genera un fallo en el
programa.
Para solucionar el problema, los datos enviados de VBAI® son compartidos PC a PC en
tiempo real a través de una red WIFI previamente sincronizada.
En LabVIEW el paso a seguir es programar los algoritmos de control necesarios para
que los Vehículos Lego NXT funcionen sin colisión, algoritmos que están en función de
las variables que son enviadas desde Vision Builder.
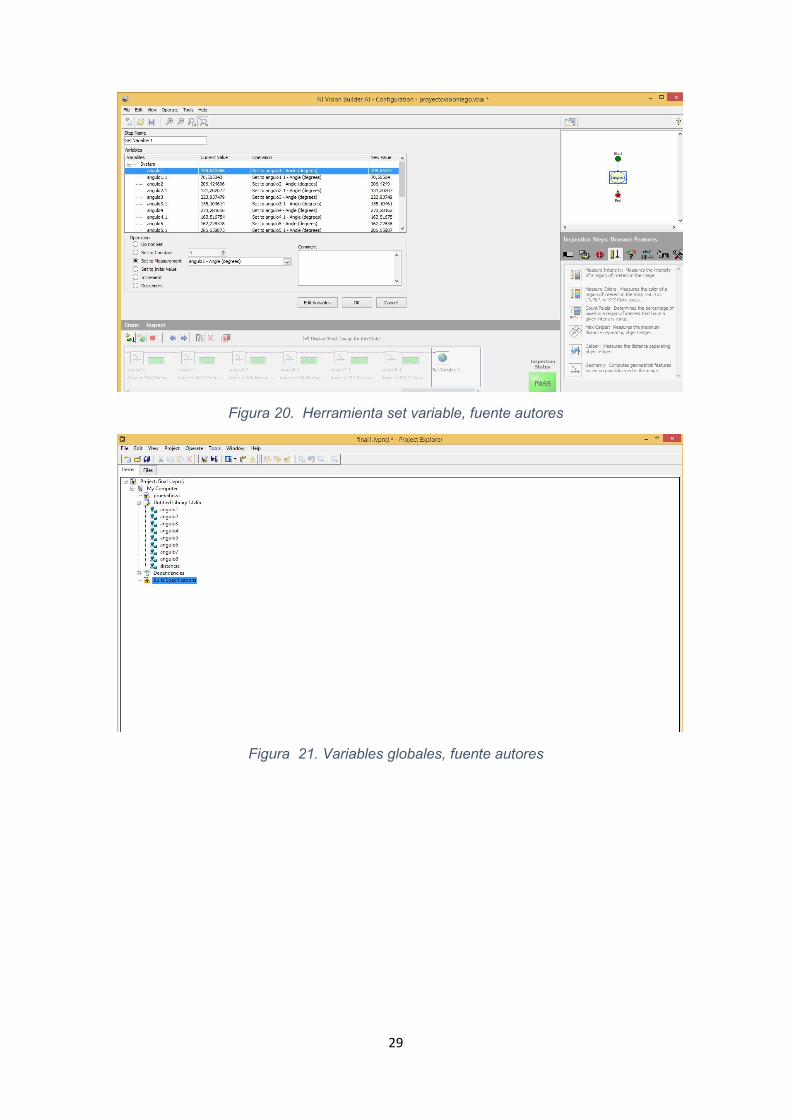
Gracias a la función set variable de Vision Builder se crean las variables globales.
29
Figura 20. Herramienta set variable, fuente autores
Figura 21. Variables globales, fuente autores
30
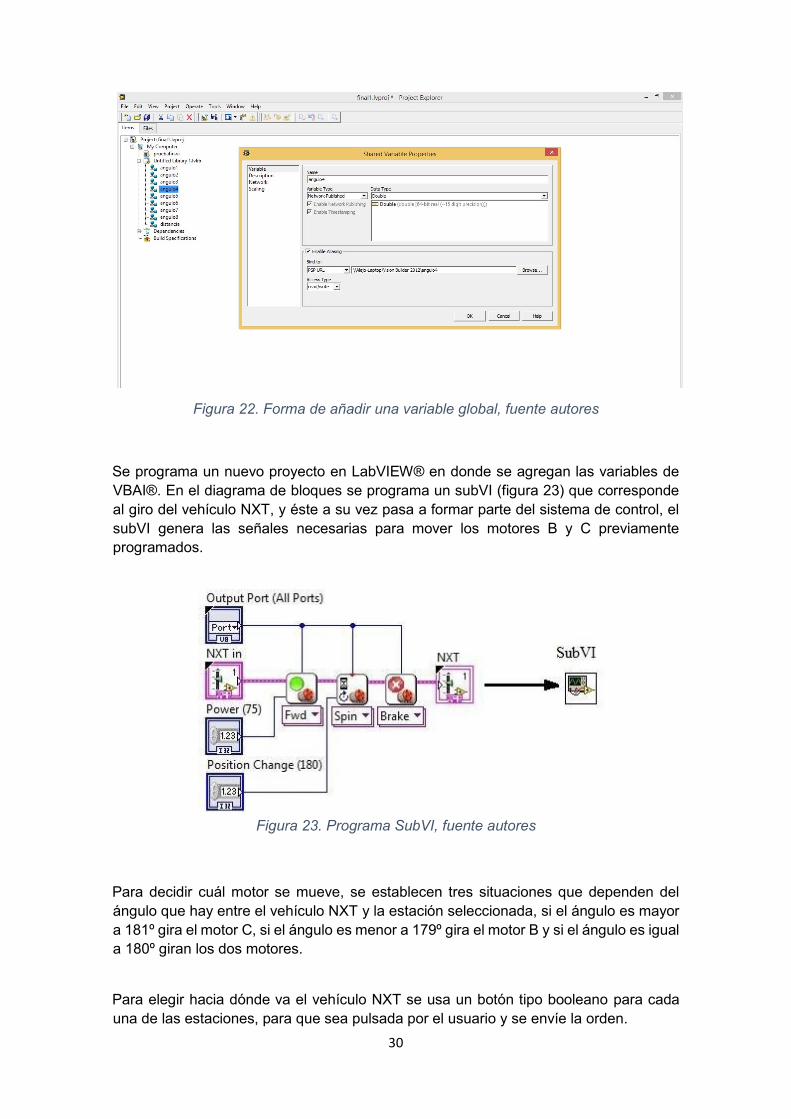
Figura 22. Forma de añadir una variable global, fuente autores
Se programa un nuevo proyecto en LabVIEW® en donde se agregan las variables de
VBAI®. En el diagrama de bloques se programa un subVI (figura 23) que corresponde
al giro del vehículo NXT, y éste a su vez pasa a formar parte del sistema de control, el
subVI genera las señales necesarias para mover los motores B y C previamente
programados.
Figura 23. Programa SubVI, fuente autores
Para decidir cuál motor se mueve, se establecen tres situaciones que dependen del
ángulo que hay entre el vehículo NXT y la estación seleccionada, si el ángulo es mayor
a 181º gira el motor C, si el ángulo es menor a 179º gira el motor B y si el ángulo es igual
a 180º giran los dos motores.
Para elegir hacia dónde va el vehículo NXT se usa un botón tipo booleano para cada
una de las estaciones, para que sea pulsada por el usuario y se envíe la orden.
31
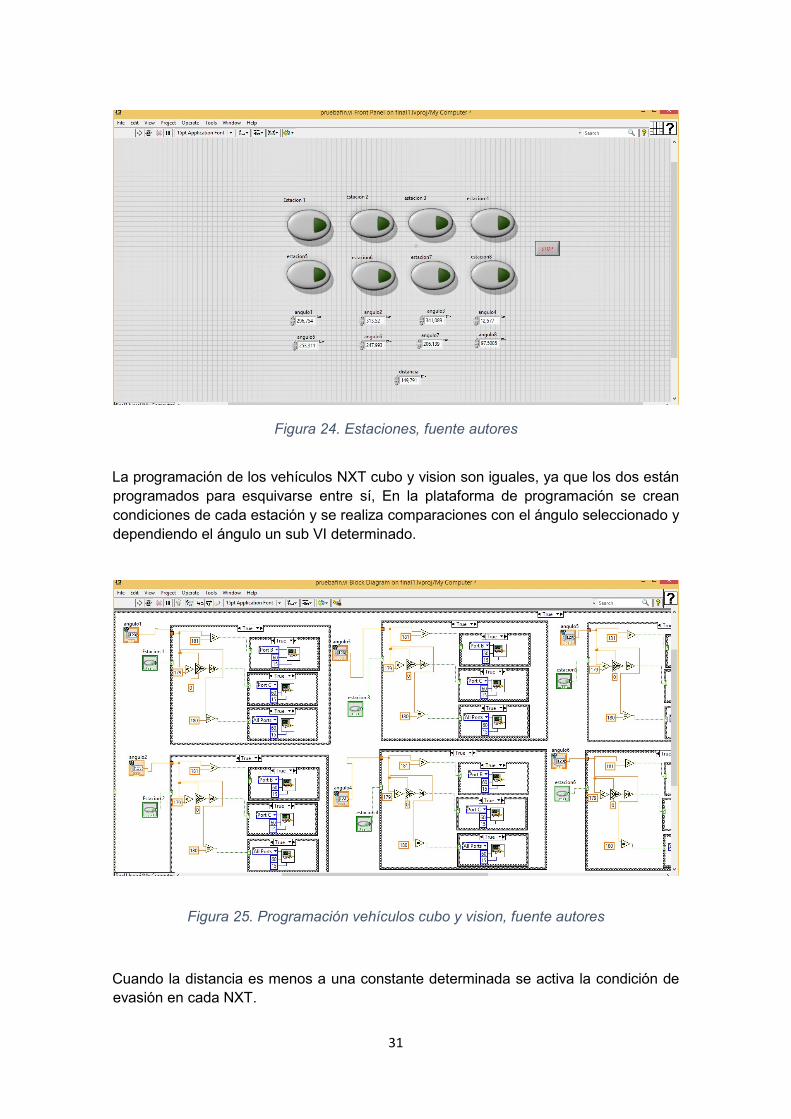
Figura 24. Estaciones, fuente autores
La programación de los vehículos NXT cubo y vision son iguales, ya que los dos están
programados para esquivarse entre sí, En la plataforma de programación se crean
condiciones de cada estación y se realiza comparaciones con el ángulo seleccionado y
dependiendo el ángulo un sub VI determinado.
Figura 25. Programación vehículos cubo y vision, fuente autores
Cuando la distancia es menos a una constante determinada se activa la condición de
evasión en cada NXT.
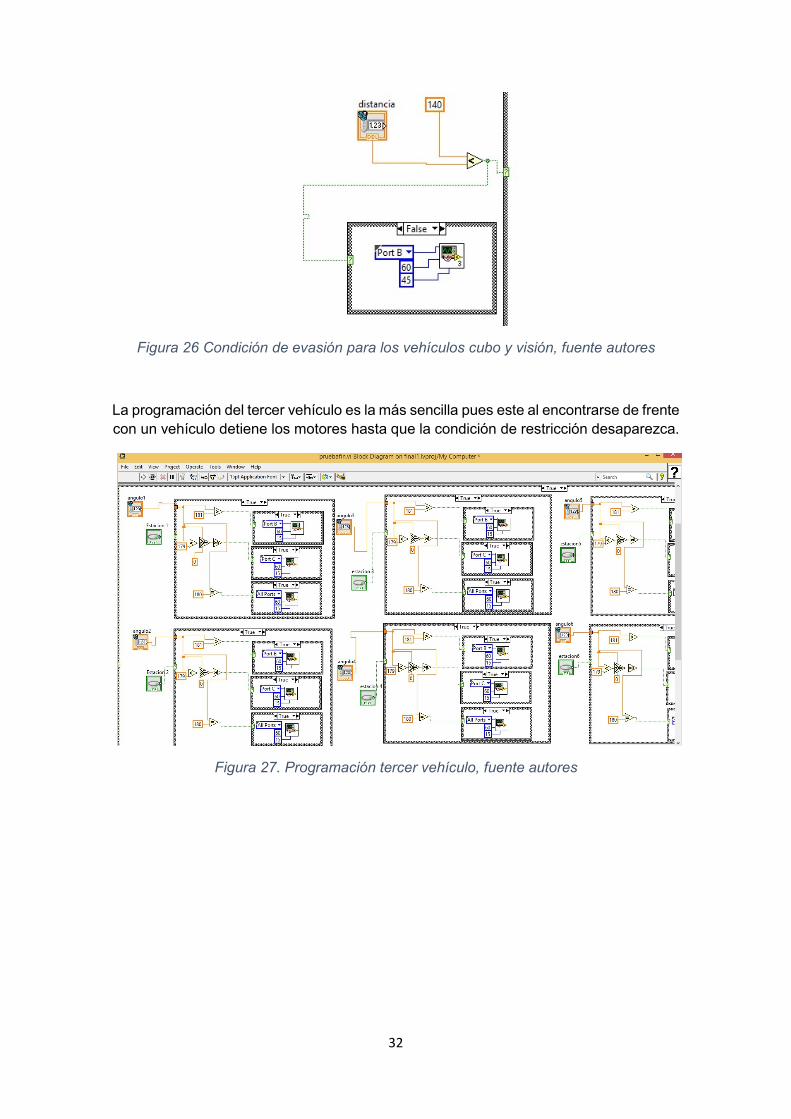
32
Figura 26 Condición de evasión para los vehículos cubo y visión, fuente autores
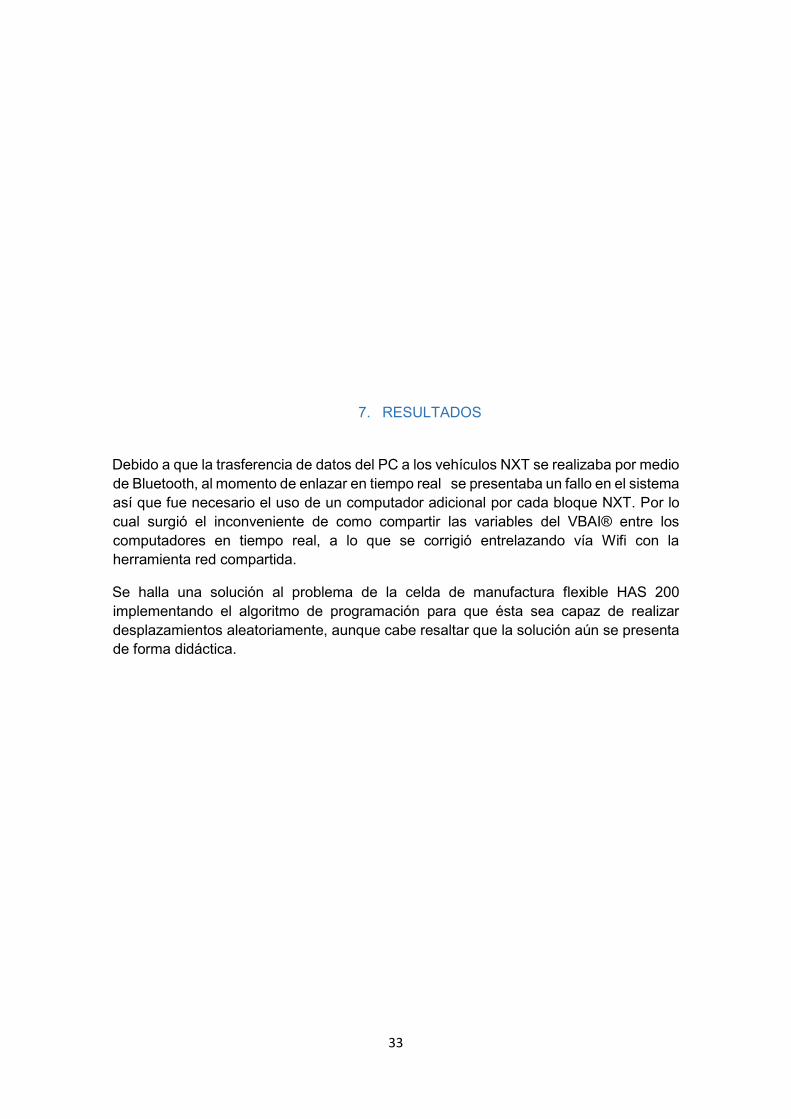
La programación del tercer vehículo es la más sencilla pues este al encontrarse de frente
con un vehículo detiene los motores hasta que la condición de restricción desaparezca.
Figura 27. Programación tercer vehículo, fuente autores
33
7. RESULTADOS
Debido a que la trasferencia de datos del PC a los vehículos NXT se realizaba por medio
de Bluetooth, al momento de enlazar en tiempo real se presentaba un fallo en el sistema
así que fue necesario el uso de un computador adicional por cada bloque NXT. Por lo
cual surgió el inconveniente de como compartir las variables del VBAI® entre los
computadores en tiempo real, a lo que se corrigió entrelazando vía Wifi con la
herramienta red compartida.
Se halla una solución al problema de la celda de manufactura flexible HAS 200
implementando el algoritmo de programación para que ésta sea capaz de realizar
desplazamientos aleatoriamente, aunque cabe resaltar que la solución aún se presenta
de forma didáctica.
34
8. CONCLUSIONES
• Los vehículos NXT son capaces de realizar rutas seleccionadas sin generar
colisión entre ellos dentro de un entorno controlado, ayudado con el
procesamiento de imágenes de Vision Builder, y este a su vez exporta los datos
a la plataforma LabVIEW.
• El sistema puede llegar a ser implementado como una solución a los problemas
que se dan en una celda de manufactura flexible, puesto que los vehículos NXT
pueden moverse aleatoriamente entre las estaciones.
• Al momento de implementar el algoritmo de programación realizado en este
proyecto hay que tener un estricto control de la iluminación, ya que al momento
de poner en marcha el programa, cualquier haz de luz genera un fallo en el
sistema.
• Gracias a que la universidad facilita los Kits Lego® Mindstorm® NXT 2.0 y las
plataformas de National Instruments (VBAI® y LabVIEW®) resulta
financieramente viable la realización de este proyecto, ya que de no ser así
resultaría prácticamente imposible por el alto costo de las licencias del software.
• Para este proyecto fue necesario implementar una plataforma de comunicación
entre los computadores, por medio de un centro de redes y recursos compartidos
que en este caso fue usado una red inalámbrica (wifi).
• Los programas VBAI® y LabVIEW® resultan ser de gran utilidad cuando se trata
de proyectos de este tipo, ya que, estos son de fácil aprendizaje. Además de
esto, son programas muy robustos que se prestan para ser utilizados en
múltiples problemas que se puedan presentar el área de automatización.
35
.
9. ANALISIS FINANCIERO DEL PROYECTO
La Universidad Distrital Francisco Jose de Caldas cuenta con los Kits Lego®
Mindstorm® NXT 2.0 y las plataformas de National Instruments (VBAI® y Labview®) por
lo cual el único gasto financiero requerido son las horas de labor de los autores y el
personal de apoyo (tutor).
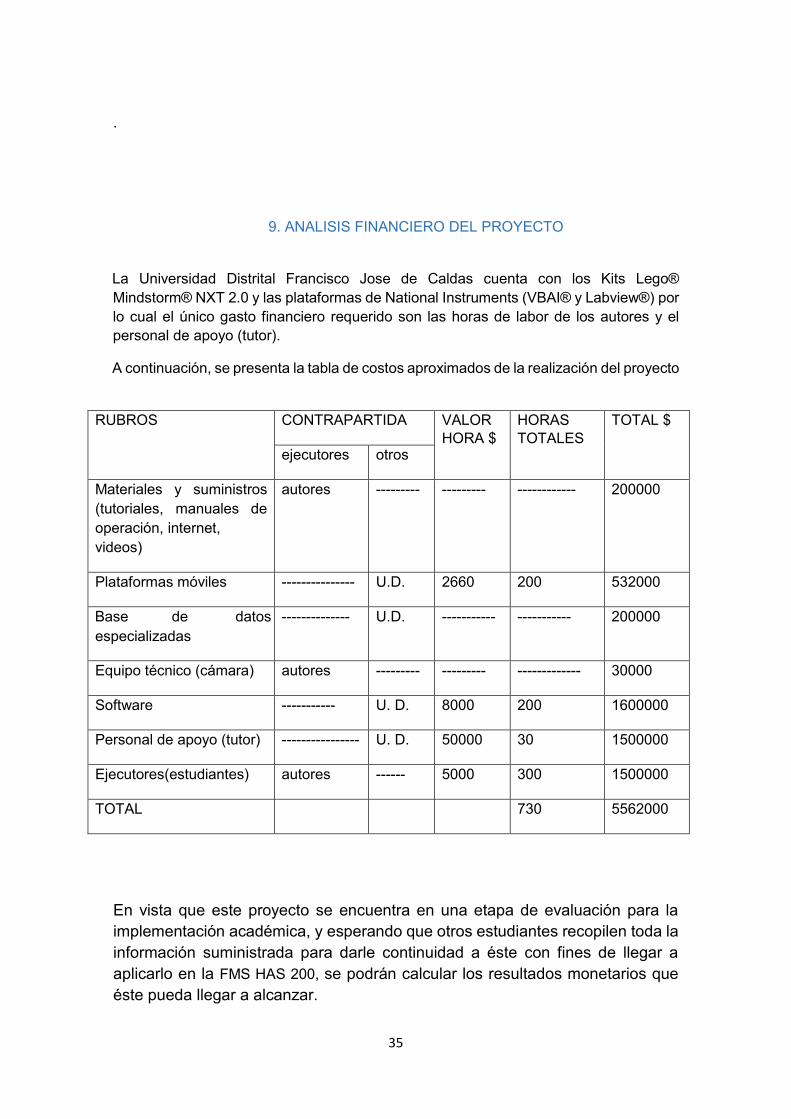
A continuación, se presenta la tabla de costos aproximados de la realización del proyecto
RUBROS CONTRAPARTIDA VALOR
HORA $
HORAS
TOTALES
TOTAL $
ejecutores otros
Materiales y suministros
(tutoriales, manuales de
operación, internet,
videos)
autores --------- --------- ------------ 200000
Plataformas móviles --------------- U.D. 2660 200 532000
Base de datos
especializadas
-------------- U.D. ----------- ----------- 200000
Equipo técnico (cámara) autores --------- --------- ------------- 30000
Software ----------- U. D. 8000 200 1600000
Personal de apoyo (tutor) ---------------- U. D. 50000 30 1500000
Ejecutores(estudiantes) autores ------ 5000 300 1500000
TOTAL 730 5562000
En vista que este proyecto se encuentra en una etapa de evaluación para la
implementación académica, y esperando que otros estudiantes recopilen toda la
información suministrada para darle continuidad a éste con fines de llegar a
aplicarlo en la FMS HAS 200, se podrán calcular los resultados monetarios que
éste pueda llegar a alcanzar.
36
Contenido
1. PLANTEAMIENTO DEL PROBLEMA ............................................................................. 4
2. ESTADO DEL ARTE ..........................................................................................................
5
3. OBJETIVOS ...................................................................................................................... 12
3.1. OBJETIVO GENERAL ................................................................................................. 12
3.2. OBJETIVOS ESPECIFICOS .......................................................................................
12
4. PROCESOS DE AUTOMATIZACIÓN ...........................................................................
13
4.1. CELDAS DE MANUFACTURA FLEXIBLE (FMC) ................................................... 13
4.2. VISIÓN ARTIFICIAL ..................................................................................................... 13
4.2.1. MÉTODOS DE CAPTACIÓN DE LAS IMÁGENES.
........................................ 14
4.2.1.1 DIGITAL. ...........................................................................................................
14
4.2.2. CAMARAS
.............................................................................................................. 15
4.2.2.1 CÁMARAS LINEALES
.................................................................................. 15
4.2.2.2 CÁMARAS MATRICIALES
........................................................................... 16
4.2.2.3 CÁMARAS A COLOR
.................................................................................... 17
4.2.3. OPTICAS
................................................................................................................ 17
4.2.4. ILUMINACIÓN...................................................................................................
..... 18
5. SELECCIÓN DE HERRAMIENTAS PARA EL DESARROLLO DEL PROYECTO 18
5.1. NI LABVIEW .................................................................................................................. 18
5.2. NI VISION BUILER ....................................................................................................... 19
5.3. KIT LEGO MINDSTORM NXT .................................................................................... 19
5.4. CÁMARA ........................................................................................................................
21
6. DESARROLLO DEL PROYECTO ................................................................................. 22
37
6.1. PROCESAMIENTO DE LA IMAGEN ........................................................................ 22
6.2. POSICIÓN DE LOS VEHICULOS DENTRO DEL ENTORNO .............................. 27
6.3. PROGRAMACIÒN EN LABVIEW .............................................................................. 30
7. RESULTADOS ..................................................................................................................
35 8. CONCLUSIONES
............................................................................................................. 36
9. ANALISIS FINANCIERO DEL PROYECTO .................... ¡Error! Marcador no definido.
Bibliografía .................................................................................................................................. 39
INDICE DE FIGURAS ..............................................................................................................
41
Bibliografía [1] Conferencia Internacional para Sistemas de Vehículos no – tripulados [En Línea].
Available: http://www.anajnu.cl/notripulados.htm. [Ultimo acceso: 13 11 2015].
[2] P. D. Chen. “Teleoperation of unmanned ground vehicle”, U. S. Patente 0191269
A1, Jul. 26, 2012.
[3] O. Michel, "Webots: Professional Mobile Robot Simulation, "Journal of Advanced
Robotics Systems, vol. 1, pp. 39-42, 2004.
[4] B. Horan, Z. Najdovski, T. Black and S. Nahavani. “OzTug Mobile Robot for
Manufacturing Transportation”, Greelong, Australia: Centre for Intelligent
Systems Research, 2006.Pag. 1-3.
[5] F. Otero et al. Cant-Miner: An Ant Colony Classification Algorithm Cope with
Continuous Attributes. In ANTS, 2008, pages 48–59.
[6] U. Rasheed, M. Ahmed, M. J. Afridi and F. Kunwar, “Road Trajectory Mining and
Autonomous Steering Control for Vision-Based Unmanned Vehicles”,
Rawalpindi, Pakistan.Department of Mechatronics Engineering, National
University of Sciences and Technology (NUST), 2008, Pages 1-6.
[7] Lego, Lego mindstorms, [En Línea]. Available:<<http://mindstorms.lego.com/.>>
[Ultimo acceso: 23 11 2015].
[8] P.Peco, J.M. Eklund, “A Control System for Automated Multi-Purpose Vehicles
for Manufacturing Applications”, Oshawa, Ontario. Faculty of Engineering and
Applied Science, University of Ontario Institute of Technology, 2008, pages 1-6.
[9] B. H. Yu,D. H. Kim,B. G. Yu, S. Y. Lee and C. S. Han, “Development of Prototype
of a Unmanned Transport Robot for Transport of Construction Materials”, Seul,
Korea. Department of Mechanical Engineering, Hanyang University, International
Conference on Control, Automation and Systems / October 2008.
[10] S. Thrun, M. Bennewitz, W. Burgard, AB Cremers, F. Dellaert, D. Fox, D. Hahnel,
C. Rosenberg, N. Roy, J. Schulte, et al. MINERVA: A secondgeneration museum
tour-guide robot. In 1999. IEEE International Conference on Robotics and
Automation, volume 3, 1999.
38
[11] A. Lucas, C. Christo, M. P. Silva and C. Cardeira, “Mosaic Based Flexible
Navigation for AGVs”, Lisboa, Portugal. IDMEC/IST, Institute of Mechanical
Engineering. 2006. Page 1-6.
[12] M. Li, K. Imou, K. Wakabayashi, S. Yokoyama.” A New Agricultural Vehicle
Localization System”, Tokyo,Japón. Graduate School of Agricultural and Life
Sciences, University of Tokyo, 2008, pag. 333-338.
[13] D. Zermas. “Control of a Leader–Follower Mobile Robotic Swarm Based on the
NXT Educational LEGO Platform”, Rio, Grecia. Department of Electrical and
Computer Engineering, University of Patras, 2011, pag. 1381-1386.
[14] H. Surmann, D. Holz, S. Blumenthal, T. Linder, P. Molitor and V. Tretyakov,
“Teleoperated Visual Inspection and Surveillance with Unmanned Ground and
Aerial Vehicles”, St. Augustin, Alemania. Fraunhofer Institute for Intelligent
Analysis and Information Systems (IAIS), 2008, Pages 1-13.
[15] Revista Semana, Colombia usa Aviones no Tripulados
<<http://www.semana.com/nacion/articulo/wikileaks-colombia-usa-aviones-
notripulados/237248-3>> [Unavailable]
[16] Y. Kim. “Control Systems Lab Using a LEGO Mindstorms NXT Motor System”,
Korea.Member, IEEE, 2011, pag. 452-461.
[17] M. Sherman, A. Leonessa, “An applied method for instruction for feedback control
systems and mechatronics to undergraduate engineering students at the
University of Central Florida,” in Proc. ASME Int. Mech. Eng. Congr. Expo. 2005,
pp. 731–740.
[18] Martinec, D.; Sebek, M.; Hurak, Z. "Vehicular platooning experiments with racing
slot cars", Control Applications (CCA), 2012 IEEE International Conference on,
On page(s): 166 – 171.
[19] Saurith Ramírez Tomas.; Varón Peña Felipe, “Sistema de visión artificial para el
control de vehículos terrestres no tripulados. (Prototipo para la FMS HAS 200)”,
Bogotá, Colombia. Facultad Tecnológica Grupo de investigación: DISING,
Universidad Distrital, marzo – 2014
[20] Ponsa, P., & Granollers, A. Diseño y automatizacion industrial. Available:
<<http://www.epsevg.upc.edu/hcd/material/lecturas/interfaz.pdf>> [En Línea]
[Ultimo acceso: 14 08 2015]
[21] Visión Artificial. n.d. Centro Integrado Politécnico Tudela. Available:
<<http://www.etiudela.com/cedula/dowlands/visionartificial.pdf>> [En Línea]
[Ultimo Acceso: 23 08 2015]
[22] National Instruments. Available]: <<http://www.ni.com/Labview/esa/>> [En
Línea] [Ultimo Acceso: 23 08 2015]
[23] Tello Leal, E., Guerrero Meléndez, T., & Saldívar Alonso, V. (2013). Revisión de
la plataforma robótica LEGO Mindstorms. S&T, 13-17.
[24] Lego. Lego Mindstorms NXT 2.0 Review. Available:
<<http://www.tuvie.com/lego-mindstorms-nxt-2-0-review/.>> [En Línea] [Ultimo
acceso: 03 09 2015]
[25] Engadget. Available:
<<http://www.engadget.com/products/microsoft/lifecam/vx-1000/specs/>> [En
línea] [Ultimo acceso: 08 08 15]
39
INDICE DE FIGURAS
Figura 1 Kit Lego Mindstorn NXT 2.0 .......................................................................... 20
Figura 2 Estructura Vehículo Lego 2.0 ........................................................................ 20
Figura 3 Cámara Microsoft AV-1000 ....................................................................... 2121
Figura 4.Imagen con Vision Assistant ......................................................................... 22
Figura 5.Selección region de interes general .............................................................. 23
Figura 6.Reconocimiento de una estación .................................................................. 23
Figura 7.Reconocimiento de las ocho estaciones ...................................................... 24
Figura 8.Vehiculo NXT 1 (Cubo) ................................................................................. 24
Figura 9.Vehiculo NXT 2 (Vision) ................................................................................ 25
Figura 10.Representacion Tercer vehiculo ................... ¡Error! Marcador no definido.5
Figura 11.Selección parte delantera cubo ................................................................. 325
Figura 12.Selección parte trasera cubo .................................................................... 336
Figura 13.Selección parte delantera vision ............................................................... 336
Figura 14.Selección parte trasera vision ..................................................................... 27
Figura 15.Selección tercer vehiculo ............................................................................ 27
Figura 16.Distancia entre frentes ................................................................................ 28
Figura 17.Medición del ángulo para cubo ................................................................... 28
Figura 18.Medición del ángulo para vision .................................................................. 29
Figura 19.Angulos con todas las estaciones ............................................................... 29
Figura 20.Herramienta set variable ............................................................................. 30
Figura 21.Variables globales ....................................................................................... 31
Figura 22.Forma de añadir una variable global ........................................................... 31
Figura 23.Programa subVI .......................................................................................... 32
Figura 24.Estaciones .................................................................................................. 32
Figura 25.Programación vehiculo cubo y vision .......................................................... 33
Figura 26.Condición de evasión para los vehiculos cubo y vision ............................... 33
Figura 27.Programación tercer vehiculo...................................................................... 34

40