sistema de adquisición de datos para la investigación de...
TRANSCRIPT

UNIVERSIDAD DE BUENOS AIRES
FACULTAD DE INGENIERÍA
MAESTRÍA EN SISTEMAS EMBEBIDOS
MEMORIA DEL TRABAJO FINAL
Sistema de adquisición de datos para lainvestigación de emisiones magnéticas como
precursores sísmicos
Autor:Ing. Leonardo M. Carducci
Director:Dr. Ing. Walter G. Fano
Jurados:Dr. Ing. Pablo Gomez (UBA)
Dr. Ing. J. Ignacio Alvarez Hamelin (UBA-CONICET)Dr. Ing. Leonardo Rey Vega (UBA-CONICET)
Este trabajo fue realizado en la Ciudad Autónoma de Buenos Aires entre enero ydiciembrede 2017.


III
Resumen
En diversas partes del mundo se han registrado múltiples evidencias de alteracioneselectromagnéticas momentos previos a una actividad sísmica. Bajo la hipótesis de que
existe una relación entre ambos fenómenos, en este trabajo se presenta laimplementación de un sistema de adquisición de datos para la grabación continua deemisiones electromagnéticas de muy bajas frecuencias, así como otras magnitudes
relevantes en zonas con una potencial actividad sísmica.
El sistema propuesto abarca tanto el desarrollo de firmware como de hardware y estábasado en un procesador ARM Cortex-M3 como núcleo central. También se incluyendiferentes tipos de sensores para el monitoreo de distintos fenómenos físicos. Esto se
complementa con un sistema de comunicaciones que comprende las tecnologías GSM,Ethernet y 802.15.4.


V
Índice general
Resumen III
1. Introducción General 11.1. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. Alcance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. Introducción Específica 32.1. Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2. Magnitudes requeridas en el sensado . . . . . . . . . . . . . . . . . . . . 3
2.2.1. Campo magnético dinámico . . . . . . . . . . . . . . . . . . . . 42.2.2. Campo magnético estático . . . . . . . . . . . . . . . . . . . . . 42.2.3. Detección de vibraciones . . . . . . . . . . . . . . . . . . . . . . 42.2.4. Detección de gas radón . . . . . . . . . . . . . . . . . . . . . . . 52.2.5. Requerimientos de muestreo para los sensores . . . . . . . . . . . 5
2.3. Herramientas utilizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3.1. Desarrollo de firmware . . . . . . . . . . . . . . . . . . . . . . 62.3.2. Desarrollo de hardware . . . . . . . . . . . . . . . . . . . . . . . 62.3.3. Repositorios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3.4. Configuración de módulos XBee . . . . . . . . . . . . . . . . . . 62.3.5. Documentación . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3.6. Herramientas matemáticas . . . . . . . . . . . . . . . . . . . . . 72.3.7. Software de comunicaciones . . . . . . . . . . . . . . . . . . . . 7
3. Diseño e Implementación 93.1. Sistema principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2. Subsistema Digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.1.1. Circuito esquemático . . . . . . . . . . . . . . . . . . . 113.2.1.2. Circuito impreso . . . . . . . . . . . . . . . . . . . . . 13
3.2.2. Firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.2.1. Arquitectura de firmware . . . . . . . . . . . . . . . . . 153.2.2.2. Maquina de estados de la aplicación principal (APL) . . 173.2.2.3. Formato de datos almacenados . . . . . . . . . . . . . 19
3.3. Subsistema de sensado . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3.1. Sensores de campo magnético dinámico (antenas) . . . . . . . . . 213.3.2. Sensor magnetómetro y acelerómetro . . . . . . . . . . . . . . . 213.3.3. Sensor de radón . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3.4. Sensor de humedad y temperatura . . . . . . . . . . . . . . . . . 223.3.5. Resumen de especificaciones para los sensores . . . . . . . . . . 23
3.4. Subsistema de comunicaciones . . . . . . . . . . . . . . . . . . . . . . . 233.4.1. Tecnología IEEE 802.3 . . . . . . . . . . . . . . . . . . . . . . . 243.4.2. Tecnología IEEE 802.15.4 . . . . . . . . . . . . . . . . . . . . . 24

VI
3.4.3. Tecnología GSM . . . . . . . . . . . . . . . . . . . . . . . . . . 253.5. Subsistema de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . 253.6. Representación detallada del sistema principal . . . . . . . . . . . . . . . 27
4. Ensayos y Resultados 294.1. Verificación de escritura en la tarjeta micro-SD . . . . . . . . . . . . . . 294.2. Verificación de los sensores . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1. Tiempos de digitalización . . . . . . . . . . . . . . . . . . . . . 314.2.2. Lecturas registradas . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.2.1. Sensado de señales analógicas . . . . . . . . . . . . . . . 344.2.2.2. Sensado con magnetómetro . . . . . . . . . . . . . . . . 354.2.2.3. Sensado con acelerómetro . . . . . . . . . . . . . . . . . 364.2.2.4. Sensado de humedad y temperatura . . . . . . . . . . . . 36
4.3. Diagramas de tiempo y funcionamiento general . . . . . . . . . . . . . . 37
5. Conclusiones 395.1. Conclusiones generales . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.3. Conceptos generales adquiridos . . . . . . . . . . . . . . . . . . . . . . 405.4. Conceptos particulares aplicados . . . . . . . . . . . . . . . . . . . . . . 405.5. Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Bibliografía 43

VII
Índice de figuras
1.1. Fenómeno de triboluminicencia. Mexico, 8 de septiempre de 2017 duran-te un sismo de 8.2 grados en la escala de Ritcher. . . . . . . . . . . . . . 2
2.1. Herramientas utilizadas para la realización del trabajo final. . . . . . . . . 7
3.1. Diagrama en bloques del sistema de adquisición a partir de los diferentessubsistemas que lo componenen. . . . . . . . . . . . . . . . . . . . . . . 9
3.2. Esquema del subsistema digital: compuesto por un microcontrolador, me-morias micro-SD y un ADC. . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3. (a) Conversor analógico digial MCP3208, (b) módulo de evaluación LPCX-presso Board LPC1769 y (c) memoria micro-SD. . . . . . . . . . . . . . 10
3.4. Esquemático principal del circuito impreso diseñado mediante la herra-mienta KiCad. Aquí se detallan los diferentes periféricos conectados almodulo LPCXpresso y el resto de las hojas asociadas a las distintas partesdel circuito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.5. Esquemático de la hoja “MEMORIAS”, que contempla un banco de 3memorias micro-SD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.6. Esquemático de la hoja “SENSORES”, donde se pueden apreciar el con-versor AD MCP3208 y las distintos conectores asociados al resto de lossensores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.7. Circuito impreso diseñado en Kicad, Top Layer. . . . . . . . . . . . . . . 133.8. Circuito impreso diseñado en Kicad, Button Layer. . . . . . . . . . . . . 133.9. Circuito impreso diseñado en Kicad, componentes. . . . . . . . . . . . . 143.10. Placa del susbsistema digital luego de la fabricación del circuito impreso
y el montaje de componentes. . . . . . . . . . . . . . . . . . . . . . . . . 143.11. Modelo de capas para la arquitectura de firmware implementado en el
microcontrolador LPC1769. . . . . . . . . . . . . . . . . . . . . . . . . 153.12. Maquina de estados de la aplicación principal (APL). . . . . . . . . . . . 173.13. Diagramas de flujo de los estados ESCRITURA (a) y SENSADO (b). Allí
también se indica el sensado de las tres Antenas (Ant-x, Ant-y y Ant-z ) yde un Acelerómetro (Acl). . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.14. Segmento de datos (A) correspontiente a las magnitudes sensadas cada 5minutos, donde <.> indica el número de bits. . . . . . . . . . . . . . . . 19
3.15. Segmento de datos (B) correspontiente a las magnitudes sensadas cada 10ms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.16. Bloques de datos generados cada 5 minutos, compuestos por un segmento“A” y 30000 segmentos “B”. . . . . . . . . . . . . . . . . . . . . . . . . 20
3.17. Composición de un archivo/hora generado mediante 12 bloques de datos,resultando en un tamaño de 2,16 MB por archivo. . . . . . . . . . . . . . 20
3.18. Estructura de los archivos guardados en la memoria micro-SD, conside-rando un directorio por cada semana y 168 archivos dentro de cada uno.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20

VIII
3.19. Antena (tipo lazo) utilizada para el sensado de emisiones magnéticas va-riables en el tiempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.20. Sensor MPU9250 (magnetómetro y acelerómetro). . . . . . . . . . . . . 213.21. Detector de radón [23]. Esquema de funcionamiento (a) y fotografía del
prototipo a utilizar (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.22. Sensor de humedad y temperatura HIH8120. . . . . . . . . . . . . . . . . 223.23. Dispositivos y estándares utilizados para las tres tecnologías compatibles
con el sistema: (a) módulo Xbee, (b) módulo SIM800 y (c) LwIP+LPCXpresso. 233.24. Esquema de comunicación mediante 802.3 utilizando una conexión TC-
P/IP a través de una red LAN. . . . . . . . . . . . . . . . . . . . . . . . 243.25. Esquema de comunicación mediante un módulo Xbee compatible con
801.15.4 y su correspondiente nodo gateway. . . . . . . . . . . . . . . . 243.26. Esquema de comunicación utilizando tecnología GSM para establecer una
conexión TCP/IP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.27. Esquema simplificado del subsistema de alimentación. . . . . . . . . . . 263.28. Panel solar LN-30P, regulador de carga para el panel ENS-5-12/24 y ba-
tería de 12 V UB-450 de 38 Ah. . . . . . . . . . . . . . . . . . . . . . . 263.29. Esquema completo del sistema principal. Aquí se puede observar el deta-
lle de cada subsistema y las intefaces digitales utilizadas por el micorcon-trolador para la comunicación con cada uno de los periféricos externos. . 27
4.1. Tiempos de ejecución para la escritura en la tarjeta vs. Número de es-critura realizada (asumiendo como escritura la transferencia completa delbuffer). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2. Porcentaje de utilización del ciclo de escritura CESC = TESC + TNESC ,considerando el tiempo de escritura máximo registrado (TMAX ) y el tiem-po de escritura más probable (TMODA). . . . . . . . . . . . . . . . . . . 31
4.3. Porcentaje de tiempos de digitalización utilizados para los sensores res-pecto del tiempo de muestreo: acelerómetro (MPU-Ax) y los tres canalesdel conversor analógico digital para las antenas (MCP CH0, CH1, CH2),resultando un tiempo de inactividad TSLEEP = 0, 962× TS . . . . . . . . 33
4.4. Conversor analógico digital MCP3208. Se indican las muestras captura-das para los canales CH0, CH1, CH2 y CH3 (normalizadas a la tensiónde referencia Vref=3,3 V). . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.5. Muestras tomadas del magnetómetro MPU9250 para los tres ejes de coor-denadas (x,y,z), aplicando un campo intencionalmente (a) y sin aplicarlo(b). Los resultados están normalizados en unidades de µT (fondo de esca-la ±4800µT). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.6. Aceleración obtenida para el eje x con el sensor MPU9250. Las lecturasestán en unidades de g (gravedad). . . . . . . . . . . . . . . . . . . . . . 36
4.7. Humedad y temperatura registrada con HIH8120, para la temperatura enoC y la humedad en %RH. . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.8. Diagramas de tiempo para el funcionamiento general. . . . . . . . . . . . 37
5.1. Zona donde se pondrá a prueba la estación de monitoreo. Lugar: Antofa-gasta de la sierra, provincia de Catamarca, Argentina. . . . . . . . . . . . 41

IX
Índice de Tablas
2.1. Requerimientos de muestreo para los sensores. . . . . . . . . . . . . . . 5
3.1. Características del microcontrolador LPC1769. . . . . . . . . . . . . . . 103.2. Especificaciones de los sensores utilizados. . . . . . . . . . . . . . . . . 23
4.1. Tiempos de escritura de la tarjeta micro-SD . . . . . . . . . . . . . . . . 304.2. Tiempos de digitalización (10 ms) . . . . . . . . . . . . . . . . . . . . . 324.3. Tiempos de digitalización (5 minutos) . . . . . . . . . . . . . . . . . . . 32


1
Capítulo 1
Introducción General
En este capítulo se presentan los fundamentos principales que motivan el desarrollo deeste trabajo, el cual forma parte de un proyecto de investigación más amplio. A partir deello se definen también los objetivos y el alcance correspondiente.
1.1. Motivación
Los terremotos son fenómenos naturales capaces de producir gran pérdida de vidas ydaños a la civilización. Es por ello que para obtener un pronóstico anticipado a estos cata-clismos la humanidad ha ingeniado distintos instrumentos capaces de detectar la actividadsísmica de manera temprana. En este sentido, el primer sismógrafo registrado se remontaal siglo II d.C., creado por el filósofo chino Chang Heng [1]. Actualmente los sismógra-fos utilizados proporcionan un alto grado de precisión para detectar los movimientos dela corteza terrestre, empleando para ello sensores mecánicos, electromecánicos, medianteacelerómetros, etc. [2]. Sin embargo, considerando la necesidad de producir una mejo-ra en las técnicas de predicción, es de gran importancia el estudio de nuevas formas deprecursores.
Existen algunas hipótesis sobre cierto tipo de emisiones electromagnéticas que podríanemplearse como precursores. Según [3] en diversas zonas con potencial actividad sísmicase han reportado fenómenos extraños un tanto inexplicables que responden aparentementea efectos electromagnéticos, detectados minutos, horas e incluso días antes de producirseel terremoto. Estas anomalías se han manifestado, por ejemplo, como estática producidaen radios, encendido de tubos fluorescentes, alteraciones en la imagen de televisores derayos catódicos, imanes cayéndose de las heladeras, brújulas desorientadas, entre otras[3] [4]. En particular, uno de los fenómenos ocurridos recientemente, días previos al granterremoto del 19 de septiembre de 2017, sucedió el 8 de septiembre del mismo año enMéxico, donde se produjo un sismo de 8.2 grados en la escala de Ritcher. Durante éstese observaron múltiples destellos luminosos, fenómeno conocido como triboluminicen-cia, Figura 1.1, cuyo origen no se conoce con exactitud hasta el momento más allá delas distintas hipótesis existentes. Este fenómeno detectado a simple vista podría tambiéntener su origen en las mismas causas que producen las anomalías reportadas y que deseanestudiarse como posibles precursoras de sismos.
Algunas hipótesis sugieren vincular estos fenómenos con la trituración de rocas cristali-nas [5] [6], ya que podría considerarse cierto tipo de efecto piezoeléctrico generado por eldesplazamiento o simplemente intensas presiones entre las rocas, principalmente aquellascon altos contenidos de cuarzo. Otra posibilidad podría deberse a variaciones ionosféricasdebido a la emanación gases que brotan desde el interior de la tierra a partir de fracturasinternas durante o previo a un evento sísmico. Sin embargo, dado que se tratan de simples

2 Capítulo 1. Introducción General
conjeturas, es necesario primero obtener suficientes datos empíricos que permitan estu-diar estos fenómenos para confirmar/refutar dichas hipótesis o eventualmente establecernuevas.
FIGURA 1.1: Fenómeno de triboluminicencia. Mexico, 8 de septiemprede 2017 durante un sismo de 8.2 grados en la escala de Ritcher.
1.2. Objetivos
Teniendo en cuenta la necesidad de obtener información que genere un aporte a la investi-gación de precursores sísmicos mediante emisiones electromagnéticas, el objetivo de estetrabajo es desarrollar un sistema de adquisición cuyo propósito es medir las perturbacio-nes del campo magnético para frecuencias extremadamente bajas. Para ello se requierela grabación ininterrumpida de estas señales sensadas almacenándolas en un medio novolátil apropiado. Al mismo tiempo, se desea monitorear la actividad sísmica empleandosensores convencionales para la medición de diferentes magnitudes ambientales. Tambiénse propone la incorporación de un sistema de comunicaciones que permita monitorear re-motamente el estado del sistema.
1.3. Alcance
El trabajo está enfocado principalmente en el desarrollo de la parte digital del sistema,limitándose específicamente a lol siguientes ítems.
Desarrollo de hardware digital (compuesto por un microcontrolador, un conversoranalógico digital, memorias externas y módulos de comunicaciones).
Desarrollo de firmware.
Ensayos y mediciones para verificación y validación del sistema.
No se contemplan como aportes en este trabajo:
Diseño de las antenas y otros sensores.
Diseño de hardware analógico (amplificadores, fuentes de switching).
Sistema de alimentación (se utilizarán equipos comerciales).

3
Capítulo 2
Introducción Específica
En este capítulo se mencionan algunos trabajos que fueron tomados como referencia paraestablecer distintas especificaciones requeridas en el diseño del sistema de adquisición, asícomo características propias de las magnitudes físicas que desean monitorearse. Tambiénse describen brevemente algunas de las herramientas utilizadas en el desarrollo del trabajo.
2.1. Estado del arte
Si bien la evidencia empírica alrededor de estos posibles precursores sísmicos es esca-sa, existen algunas investigaciones llevadas a cabo como las realizadas por Karakelian[7], quién trabajó con mediciones de campo magnético en las frecuencias de ULF (UltraLow Frequency) ya que a frecuencias mayores la profundidad de penetración disminuyey eso dificulta la medición debido a que existe demasiada atenuación. Para hacer dichasmediciones es conveniente aislar el instrumento de interferencias ULF de tipo ionosféri-ca, geomagnética, resonancia de Schumann, variaciones de temperatura y otras variablesambientales [8]. También hay que discriminar los micropulsos de origen geomagnéticosque se pueden medir en diferentes latitudes cuyos períodos van desde 0,2 segundos hasta10 minutos [9]. Lo que interesa es detectar las señales producidas por los movimientossísmicos desde las placas tectónicas, que son señales del orden de 7 segundos de perío-do según [7]. Hata y Yabashi [10], en la ciudad de Ito, Shizuoka, y en Monte Fugen,Nagasaki, (1992), han detectado señales de campo magnético en la banda de frecuen-cias ELF (Extremely Low Frequency), de 225Hz aproximadamente, antes y después deun terremoto. Otra experiencia fue la de Bleier [11], que colocó dos sensores de campomagnético en la banda de ULF separados por 20 km entre sí, detectando en Loma Prieta(1989) una frecuencia de 0, 01Hz, con una intensidad pico de campo magnético de 3nT(nano-tesla). Otras emisiones anómalas, en la banda de ULF, se han detectado en el te-rremoto de Spitak, Armenia (1988) de acuerdo a Molchanov (1992) y Kopytenko (1993).También durante el terremoto de Guam (1993), según Hayakawa (1996).
2.2. Magnitudes requeridas en el sensado
El objetivo principal del sistema de adquisición es sensar variaciones de campo magnéticoa muy bajas frecuencias e intensidades, en este caso se ha elegido un rango de 0, 01-10Hzbasado en el trabajo publicado por Karakelian [7]. Debido a que las ondas electromagné-ticas que se esperan detectar se encuentran en la zona de campo cercano, es convenienteque la estación de medición sense las tres componentes del campo magnético. Tambiénse desean registrar algunos precursores convencionales, como la presencia de gas radón

4 Capítulo 2. Introducción Específica
liberado desde el interior de las rocas tras su fractura y las vibraciones mecánicas que pu-dieran estar relacionadas con posibles movimientos sísmicos. Por otra parte, para poderaislar las emisiones magnéticas de bajas frecuencias que pudieran tener un origen tectóni-co, es necesario caracterizar otras posibles fuentes de señales magnéticas en frecuenciassimilares en las proximidades de la estación de sensado, ya que las emisiones vinculadasa sismos podrían confundirse con variaciones geomagnéticas ionosféricas o magnetosfé-ricas, la interferencia cultural (generada por el hombre), así como señales inducidas en elequipo debido al movimiento, humedad, temperatura y otros factores ambientales.
En consecuencia, serán necesarios distintos tipos de sensores como: antenas de lazo paramedir el campo magnético dinámico a muy bajas frecuencias, un magnetómetro para elcampo magnético terrestre estático, acelerómetros para medir vibraciones, detector deradón debido a la posible presencia de dicho gas, sensores de humedad y temperatura.A continuación se describen brevemente características de cada tipo de sensado (algunosrequerimientos específicos de los sensores utilizados se presentarán en el capítulo 3).
2.2.1. Campo magnético dinámico
Se espera detectar emisiones magnéticas en un rango de frecuencias de 0, 01-10Hz y amuy bajas intensidades, en el orden de los nT . Para medir estas perturbaciones se utilizanen este caso antenas de tipo lazo. Se trata de un arrollamiento de cable (o bobina) deárea significativa. Con este tipo de antenas se pueden detectar las emisiones de campomagnético variable midiendo la tensión inducida que se produce debido a la variacióndel flujo concatenado. Si bien la tasa de muestreo mínima en este caso, que cumpla elcriterio de Nysquit, sería de 20Hz, se ha fijado una tasa de 100Hz para tener un mayormargen considerando que el filtro antialiasing utilizado previo a la digitalización (que noforma parte de este trabajo ya que se encuentra en los amplificadores de las antenas) nose comporta idealmente.
2.2.2. Campo magnético estático
El campo magnético estático de la tierra, si bien puede sufrir variaciones por efectos io-nosféricos u otros fenómenos magnéticos localizados, en general es una magnitud cons-tante con el tiempo. Por lo tanto, será importante contrastarla con las mediciones de emi-siones magnéticas variables y poder extraer conclusiones al momento de observar dichasperturbaciones. Básicamente la diferencia entre el campo magnético estático y las pertur-baciones magnéticas que desean detectarse podrían entenderse como una analogía entreuna señal con una componente de continua (campo estático) superpuesta a una alterna pe-queña (campo dinámico o perturbaciones). Para el campo magnético estático se utilizaráun magnetómetro que se detallará en la sección 3.3.2.
2.2.3. Detección de vibraciones
Es relevante poder medir continuamente, junto a las perturbaciones magnéticas, las vi-braciones que pudieran tener origen sísmico. Por esta razón, se desea incorporar algúntipo de sismógrafo para detectar dichas vibraciones en el terreno. Podrían utilizarse unavariedad de detectores mecánicos o piezoeléctricos, sin embargo por simplicidad para elprototipo propuesto en este trabajo se utilizará un acelerómetro especificado en la sección3.3.2.
2.3. Herramientas utilizadas 5
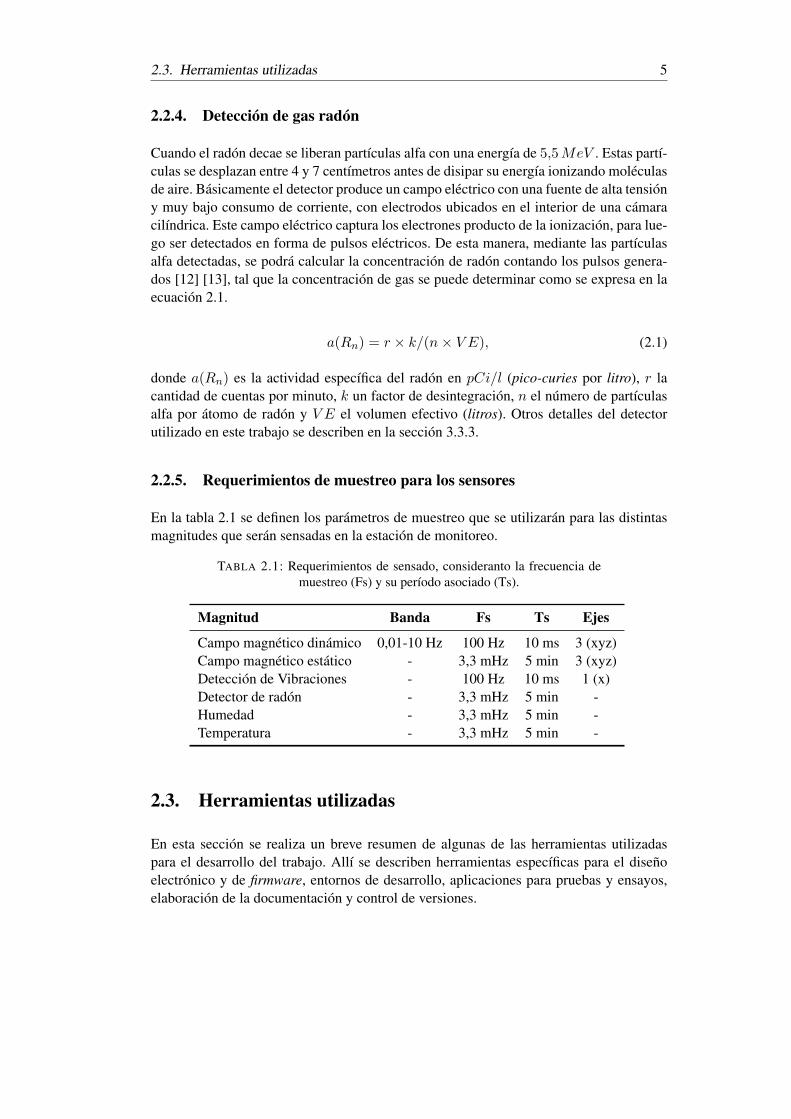
2.2.4. Detección de gas radón
Cuando el radón decae se liberan partículas alfa con una energía de 5,5MeV . Estas partí-culas se desplazan entre 4 y 7 centímetros antes de disipar su energía ionizando moléculasde aire. Básicamente el detector produce un campo eléctrico con una fuente de alta tensióny muy bajo consumo de corriente, con electrodos ubicados en el interior de una cámaracilíndrica. Este campo eléctrico captura los electrones producto de la ionización, para lue-go ser detectados en forma de pulsos eléctricos. De esta manera, mediante las partículasalfa detectadas, se podrá calcular la concentración de radón contando los pulsos genera-dos [12] [13], tal que la concentración de gas se puede determinar como se expresa en laecuación 2.1.
a(Rn) = r × k/(n× V E), (2.1)
donde a(Rn) es la actividad específica del radón en pCi/l (pico-curies por litro), r lacantidad de cuentas por minuto, k un factor de desintegración, n el número de partículasalfa por átomo de radón y V E el volumen efectivo (litros). Otros detalles del detectorutilizado en este trabajo se describen en la sección 3.3.3.
2.2.5. Requerimientos de muestreo para los sensores
En la tabla 2.1 se definen los parámetros de muestreo que se utilizarán para las distintasmagnitudes que serán sensadas en la estación de monitoreo.
TABLA 2.1: Requerimientos de sensado, consideranto la frecuencia demuestreo (Fs) y su período asociado (Ts).
Magnitud Banda Fs Ts Ejes
Campo magnético dinámico 0,01-10 Hz 100 Hz 10 ms 3 (xyz)Campo magnético estático - 3,3 mHz 5 min 3 (xyz)Detección de Vibraciones - 100 Hz 10 ms 1 (x)Detector de radón - 3,3 mHz 5 min -Humedad - 3,3 mHz 5 min -Temperatura - 3,3 mHz 5 min -
2.3. Herramientas utilizadas
En esta sección se realiza un breve resumen de algunas de las herramientas utilizadaspara el desarrollo del trabajo. Allí se describen herramientas específicas para el diseñoelectrónico y de firmware, entornos de desarrollo, aplicaciones para pruebas y ensayos,elaboración de la documentación y control de versiones.

6 Capítulo 2. Introducción Específica
2.3.1. Desarrollo de firmware
Se utilizó el entorno de desarrollo LPCExpresso IDE, el cual ofrece herramientas total-mente compatibles con la biblioteca LPCOpen (utilizada en este trabajo). Este entornode desarrollo provee funciones avanzadas de edición, compilación y depuración, ademásde ser altamente funcional para microcontroladores de la familia LPC (fabricante NXP).Entre otras cosas, se ha elegido este IDE debido a que ya se poseía experiencia con elmismo y por su facilidad de uso.
2.3.2. Desarrollo de hardware
El diseño de circuitos impresos se realizó mediante la herramienta KiCad. Algunas delas ventajas es que es un software libre con el que se pueden diseñar circuitos de múlti-ples capas y altamente sofisticados, entre otras cosas. No obstante, no posee herramientascomplejas de análisis como otros software pagos, aunque se puede considerar suficientepara desarrollos de pequeña y mediana complejidad.
2.3.3. Repositorios
Para el control de versiones se utilizó la aplicación git, mediante la cual se fueron actua-lizando los archivos tanto de firmware como hardware en un repositorio local y remoto.Para el repositorio remoto se utilizó una cuenta de gitlab.
Por otra parte, se usaron distintas opciones que ofrece Google Drive principalmente paraplanillas de cálculo (lista de componentes, fechas importantes, datos relevantes, etc.) y lautilización de documentos borradores para ordenar y guardar información general, sitiosweb, referencias, etc.
2.3.4. Configuración de módulos XBee
Para la configuración de los módulos inalámbricos XBee se utilizó la última versión dela herramienta X-CTU brindada por el fabricante (Digi International). La gran ventaja deeste software es la simplicidad de uso, ya que posee un entorno de desarrollo altamenteintuitivo y con amplias funcionalidades, reemplazando a versiones anteriores en dondedebía configurarse cada módulo mediante comandos AT.
2.3.5. Documentación
La documentación para la realización del presente informe se hizo con la herramientaOverleaf. Una de las grandes ventajas es que se puede utilizar en un IDE online, tansólo registrándose en una cuenta, teniendo plena disponibilidad de todos los paquetesnecesarios sin tener que instalar ninguno en particular. La desventaja es claramente que serequiere acceso a internet para su uso, además de tener un límite de 60 archivos por cadadocumento. No obstante siempre está garantizada la posibilidad tanto subir como bajarproyectos enteros si se requiere trabajar de manera offline o en un entorno de desarrollodiferente.

2.3. Herramientas utilizadas 7
2.3.6. Herramientas matemáticas
También se utilizó la versión trial de Matlab, tanto para el análisis de la informacióncomo para su visualización, en particular en lo referido a las muestras obtenidas mediantelos sensores y para los datos grabados en la memoria micro-SD. También se hizo uso deuna herramienta que forma parte del mismo paquete denominada Simulink que permitióvisualizar datos y variables en un gráfico en tiempo real enviados por una interfaz serie.
2.3.7. Software de comunicaciones
Se utilizaron también algunas aplicaciones para realizar pruebas de comunicaciones. Porun lado el software para comunicación por puerto serie Terminal resultó de muy simplemanejo, además de poseer una visualización gráfica muy básica para los datos recibi-dos. Por otra parte, para chequear la conexión por 802.3 entre el microcontrolador y unacomputadora conectada a la misma red LAN, se utilizó la aplicación Hercules.
FIGURA 2.1: Herramientas utilizadas para la realización del trabajo final.


9
Capítulo 3
Diseño e Implementación
Teniendo en cuenta los requerimientos mencionados en la sección 2.2, en el presentecapítulo se describen los aspectos principales relacionados al diseño e implementación dehardware y firmware para el sistema de adquisición de datos propuesto.
3.1. Sistema principal
Como se observa en la Figura 3.1, el sistema principal puede agruparse en cuatro sub-sistemas: digital, sensado, comunicaciones y alimentación. Cabe mencionar que tanto eldigital como el de comunicaciones son los que mayor aporte presentan en el marco deeste trabajo. El subsistema de sensado también forma parte de los aportes a excepción delos sensores analógicos (antenas con sus amplificadores y el cilindro detector de radón).En cuanto al subsistema de alimentación, si bien será explicado brevemente, éste no for-ma parte de la implementación en este trabajo. En las siguientes secciones se resumencada uno de los subsistemas mencionados, describiendo un esquema más detallado en lasección 3.6 .
FIGURA 3.1: Diagrama en bloques del sistema de adquisición a partir delos diferentes subsistemas que lo componenen.
3.2. Subsistema Digital
Esta etapa es la encargada del procesamiento digital y coordinación de todo el sistema.Los tres elementos de mayor relevancia que lo componen son un microcontrolador, unconversor analógico digital (ADC, Analog to Digital Converter) y un banco de memoriasmicro-SD para el almacenamiento de los datos sensados. En la Figura 3.2 se muestra agrandes razgos el flujo de datos que va desde la captura en los conversores, pasando luegopor el procesado donde se les da un formato y finalmente la transferncia de la informacióna la memoria micro-SD en donde se almacenará de manera permanente.

10 Capítulo 3. Diseño e Implementación
FIGURA 3.2: Esquema del subsistema digital: compuesto por un micro-controlador, memorias micro-SD y un ADC.
3.2.1. Hardware
El conversor analógico digital utilizado es el MCP3208 [14], Figura 3.3 (a), el cual poseeocho canales con una resolución de 12-bit y una interfaz SPI para la comunicación con elmicrocontrolador.
No obstante el elemento central de esta etapa es un microcontrolador de arquitectura ARMCortex-M3, LPC1769 [15]. Algunas características se indican en la Tabla 3.1.
TABLA 3.1: Características del microcontrolador LPC1769.
Frecuencia de clock 120 MHzMemoria de programa 512 KBMemoria RAM 64 KBInterfaces de com. UART, I2C, SPI, Ethernet, otras.
Las funciones principales de este microcontrolador abarcan el muestreo de sensores analó-gicos con el conversor MCP3208, el manejo de un sensor digital con magnetómetro yacelerómetro mediante el protocolo I2C, el acceso a un RTC (Real Time Clock) para ga-rantizar los datos de fecha y hora, la lectura/escritura de una tarjeta de memoria micro-SDmediante una interfaz SPI y manejo de las diferentes tecnologías de comunicaciones esti-puladas (801.15.4, 802.3 y GSM). En particular, este prototipo esta basado en el módulode evaluación LPCXpresso Board [16], presentado en la Figura 3.3 (b). La elección deeste módulo fue basada en que ya se tenía experiencia con el mismo, es económico, per-mite acelerar los tiempos de desarrollo, posee suficientes puertos e interfaces necesariospara el sistema y además ya posee el circuito integrado LAN8720 para la capa física deEthernet.
Por último, el medio de almacenamiento para los datos sensados es una memoria micro-SD convencional, Figura 3.3 (c), la cual será manipulada en el modo SPI.
FIGURA 3.3: (a) Conversor analógico digial MCP3208, (b) módulo deevaluación LPCXpresso Board LPC1769 y (c) memoria micro-SD.

3.2. Subsistema Digital 11
3.2.1.1. Circuito esquemático
En la Figura 3.4 se observa el circuito esquemático diseñado en Kicad (hoja de mayorjerarquía) que contiene al módulo LPCXpresso y las distintas hojas que incluyen al restodel circuito (agrupadas por categoría). Las hojas más relevantes se muestran en las figuras3.5 (banco de memorias micro SD) y 3.6 (conversor AD y salidas a los sensores).
FIGURA 3.4: Esquemático principal del circuito impreso diseñado me-diante la herramienta KiCad. Aquí se detallan los diferentes periféricosconectados al modulo LPCXpresso y el resto de las hojas asociadas a las
distintas partes del circuito.

12 Capítulo 3. Diseño e Implementación
FIGURA 3.5: Esquemático de la hoja “MEMORIAS”, que contempla unbanco de 3 memorias micro-SD.
FIGURA 3.6: Esquemático de la hoja “SENSORES”, donde se puedenapreciar el conversor AD MCP3208 y las distintos conectores asociados
al resto de los sensores.
Para el caso de las interfaces de comunicación, sólo contemplan un conector RJ45 co-nectado directamente a las terminales de Ehternet del LPCXpresso y un conector para lacomunicación con los módulos inalámbricos, lo cuales son montados en una placa ex-terna al circuito principal (esto es para dar mayor flexibilidad en el montaje del equipocompleto).

3.2. Subsistema Digital 13
3.2.1.2. Circuito impreso
El circuito impreso, también diseñado en Kicad conjuntamente con su correspondienteesquemático, se muestra en el layout de las Figuras 3.7 y 3.8, y la capa de componentesen la Figura 3.9 .
FIGURA 3.7: Circuito impreso diseñado en Kicad, Top Layer.
FIGURA 3.8: Circuito impreso diseñado en Kicad, Button Layer.

14 Capítulo 3. Diseño e Implementación
FIGURA 3.9: Circuito impreso diseñado en Kicad, componentes.
A partir de este diseño se procedió a la fabricación del circuito impreso y montaje decomponentes, como se muestra en la Figura 3.10.
FIGURA 3.10: Placa del susbsistema digital luego de la fabricación delcircuito impreso y el montaje de componentes.

3.2. Subsistema Digital 15
3.2.2. Firmware
El firmware implementado está basado en un conjunto de bibliotecas para el manejo delos distintos dispositivos, algunas desarrolladas específicamente para este trabajo y otraspertenecientes a bibliotecas estándar como LPCOpen, LwIP y FatFs.
Por otro lado, el firmware se realizó en la modalidad bare metal, es decir sin el uso deun sistema operativo, debido a que el flujo de programa es relativamente determinístico,favoreciendo también a un menor uso de la memoria RAM. Además, por las limitacionespropias en el alcance de este trabajo y teniendo en cuenta que inicialmente el desarrollose realizó sin sistema operativo, se decidió seguir sobre esa misma línea. Sin embargo,se plantea para futuras mejoras explorar la utilización de algún sistema operativo comoFreeRTOS, OSEK u otros específicos para dispositivos embebidos en redes de sensorescomo TinyOS, Contiki, etc. Por lo tanto, el modelo de programación para este trabajo estábasado en una máquina de estados finitos.
3.2.2.1. Arquitectura de firmware
En la Figura 3.11 se representa el modelo de abstracción en capas del firmware desa-rrollado. Cada capa tiene el propósito de abstraer a las capas superiores de los detallesparticulares dependientes de los dispositivos utilizados. A continuación se describe cadauna de estas capas indicadas en la figura.
FIGURA 3.11: Modelo de capas para la arquitectura de firmware imple-mentado en el microcontrolador LPC1769.
LPCOpen: la capa LPCOpen es un paquete de bibliotecas para microcontrolado-res disponible desde el sitio web del fabricante (NXP) [17], en este caso de la serieLPC1700. Éstas abarcan los niveles de abstracción de hardware (HAL, Hardwa-re Abstraction Level) que provee una interfaz con un mayor nivel de abstracciónpara la manipulación de registros y periféricos del microcontrolador, por ejemploTIMERs, UART, I2C, SPI, Ethernet, ADC, DAC, PWM, interrupciones, etc.

16 Capítulo 3. Diseño e Implementación
COM: en la capa de comunicaciones se implementaron bibliotecas para controlarlos dispositivos de las tres tecnologías de comunicaciones utilizadas: IEEE 802.3,IEEE 802.15.4 y GSM/GPRS. Para IEEE 802.3 se utiliza la biblioteca estándarLwIP [18], que provee la funcionalidad básica para garantizar una comunicaciónmediante un enlace Ethernet compatible con los protocolos TCP-UDP/IP, ICMP,DHCP, etc. Con LwIP se dispone de un stack simplificado y optimizado para serimplementado en sistemas de bajos recursos como es el caso de microcontrola-dores. Por otra parte, la biblioteca XBEE fue desarrollada para independizarse delprotocolo especificado por el fabricante (XBee-API) [19] donde se define un for-mato de datos para la comunicación entre el módulo Xbee y el microcontroladormediante una interfaz serie (UART). Por otra parte, la biblioteca SIM se implemen-tó para la conexión TCP/IP a través de un módulo GSM SIM800, al cual se puedeacceder mediante comandos AT desde una de las interfaces de comunicación seriedel microcontrolador
FatFs: la biblioteca FatFs [20] ofrece un stack compatible con el manejo de ar-chivos en formato FAT. Ésta provee un módulo genérico para pequeños sistemasembebidos, escrita de acuerdo con ANSI C (C89) y completamente separada dela capa de entrada/salida del disco, por lo tanto, es independiente de la plataforma.Sin embargo para el microcontrolador utilizado en este caso, la comunicación con elmedio de almacenamiento (micro-SD) es mediante el protocolo SPI, por lo cual sedebió adaptar la biblioteca de la capa de entrada/salida (API-FAT) a la interfaz SPIcompatible con las capas de menor abstracción utilizadas en este caso (LPCOpen)del microcontrolador LPC1769.
SENSORES: esta capa es un conjunto de bibliotecas derarrolladas especificamen-te para el manejo de los distintos sensores utilizados en el sistema de adquisiciónde manera tal que las capas superiores (aplicación) se independicen de los deta-lles de hardware. La biblioteca MPU maneja la inicialización, calibración, lecturay escritura de los sensores acelerómetro y magnetómetro del circuito integrado uti-lizado para tal fin (MPU9250), empleando el protocolo I2C para la comunicación.Por otra parte, MCP es una biblioteca implementada para el conversor analógicodigital externo (MCP3208), al cual se accede mediante una interfaz SPI para la lec-tura de datos desde el microcontrolador. No se utilizaron los conversores internosdel LPC1769 debido a que se detectaron múltiples glitch (fallas) que se producíanaleatoriamente. Para el manejo del sensor de humedad y temperatura (HIH8120)se implementó la biblioteca HIH que a través del protocolo de comunicación I2Cpermite obtener los datos sensados. Por último, la biblioteca RAD es una imple-mentación sencilla que abarca la inicialización del pin por donde se contabilizaránlos pulsos provenientes del detector de gas radón y el conteo de los mismos en elintervalo de tiempo prefijado.
API: todas las bibliotecas mencionadas anteriormente permiten el manejo de losdistintos periféricos del sistema para el hardware utilizado en este proyecto. Sinembargo, para que la capa de aplicación final sea completamente independiente deestos elementos, se agrega una capa de interfaz de aplicación (API, ApplicationProgramming Interface) para lograr una completa abstracción de hardware en lacapa de aplicaciones superior.
APL: finalmente la capa de aplicación (APL), se trata de una rutina independientedel hardware donde correrá la aplicación principal. En este caso, se trata de una ma-quina de estados finitos (MEF), la cual se describe con mayor detalle en la sección3.2.2.2.
3.2. Subsistema Digital 17
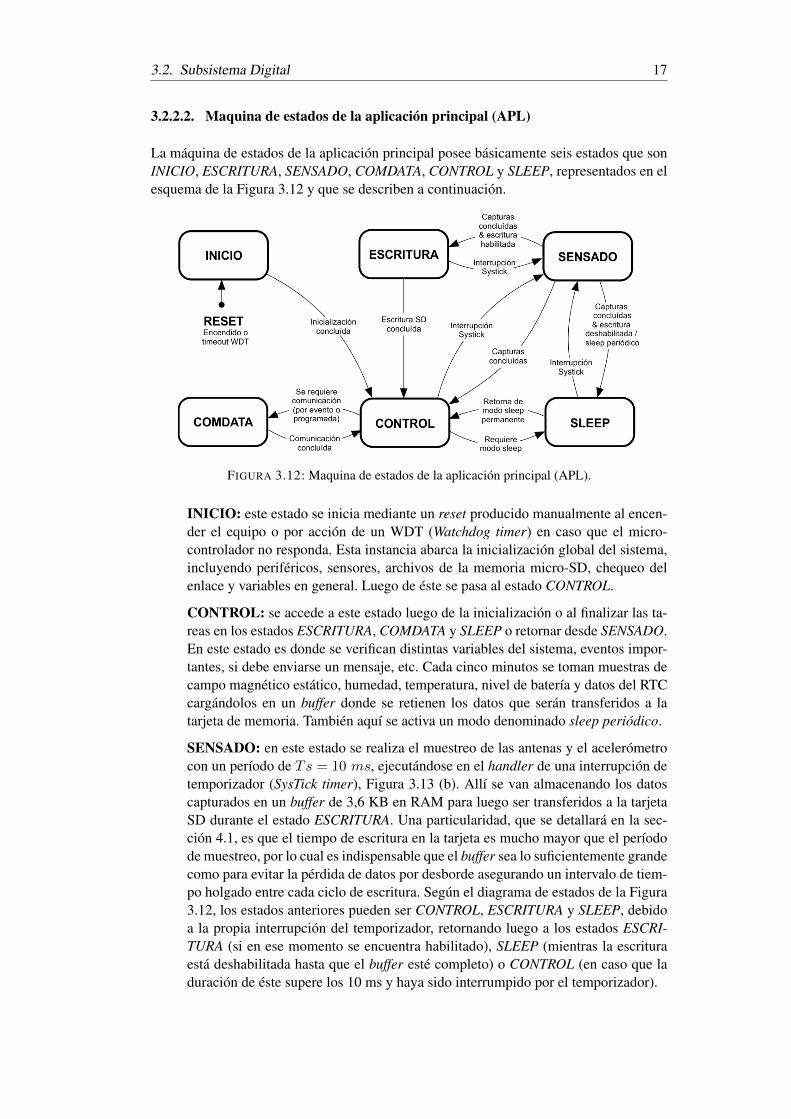
3.2.2.2. Maquina de estados de la aplicación principal (APL)
La máquina de estados de la aplicación principal posee básicamente seis estados que sonINICIO, ESCRITURA, SENSADO, COMDATA, CONTROL y SLEEP, representados en elesquema de la Figura 3.12 y que se describen a continuación.
FIGURA 3.12: Maquina de estados de la aplicación principal (APL).
INICIO: este estado se inicia mediante un reset producido manualmente al encen-der el equipo o por acción de un WDT (Watchdog timer) en caso que el micro-controlador no responda. Esta instancia abarca la inicialización global del sistema,incluyendo periféricos, sensores, archivos de la memoria micro-SD, chequeo delenlace y variables en general. Luego de éste se pasa al estado CONTROL.
CONTROL: se accede a este estado luego de la inicialización o al finalizar las ta-reas en los estados ESCRITURA, COMDATA y SLEEP o retornar desde SENSADO.En este estado es donde se verifican distintas variables del sistema, eventos impor-tantes, si debe enviarse un mensaje, etc. Cada cinco minutos se toman muestras decampo magnético estático, humedad, temperatura, nivel de batería y datos del RTCcargándolos en un buffer donde se retienen los datos que serán transferidos a latarjeta de memoria. También aquí se activa un modo denominado sleep periódico.
SENSADO: en este estado se realiza el muestreo de las antenas y el acelerómetrocon un período de Ts = 10 ms, ejecutándose en el handler de una interrupción detemporizador (SysTick timer), Figura 3.13 (b). Allí se van almacenando los datoscapturados en un buffer de 3,6 KB en RAM para luego ser transferidos a la tarjetaSD durante el estado ESCRITURA. Una particularidad, que se detallará en la sec-ción 4.1, es que el tiempo de escritura en la tarjeta es mucho mayor que el períodode muestreo, por lo cual es indispensable que el buffer sea lo suficientemente grandecomo para evitar la pérdida de datos por desborde asegurando un intervalo de tiem-po holgado entre cada ciclo de escritura. Según el diagrama de estados de la Figura3.12, los estados anteriores pueden ser CONTROL, ESCRITURA y SLEEP, debidoa la propia interrupción del temporizador, retornando luego a los estados ESCRI-TURA (si en ese momento se encuentra habilitado), SLEEP (mientras la escrituraestá deshabilitada hasta que el buffer esté completo) o CONTROL (en caso que laduración de éste supere los 10 ms y haya sido interrumpido por el temporizador).
18 Capítulo 3. Diseño e Implementación
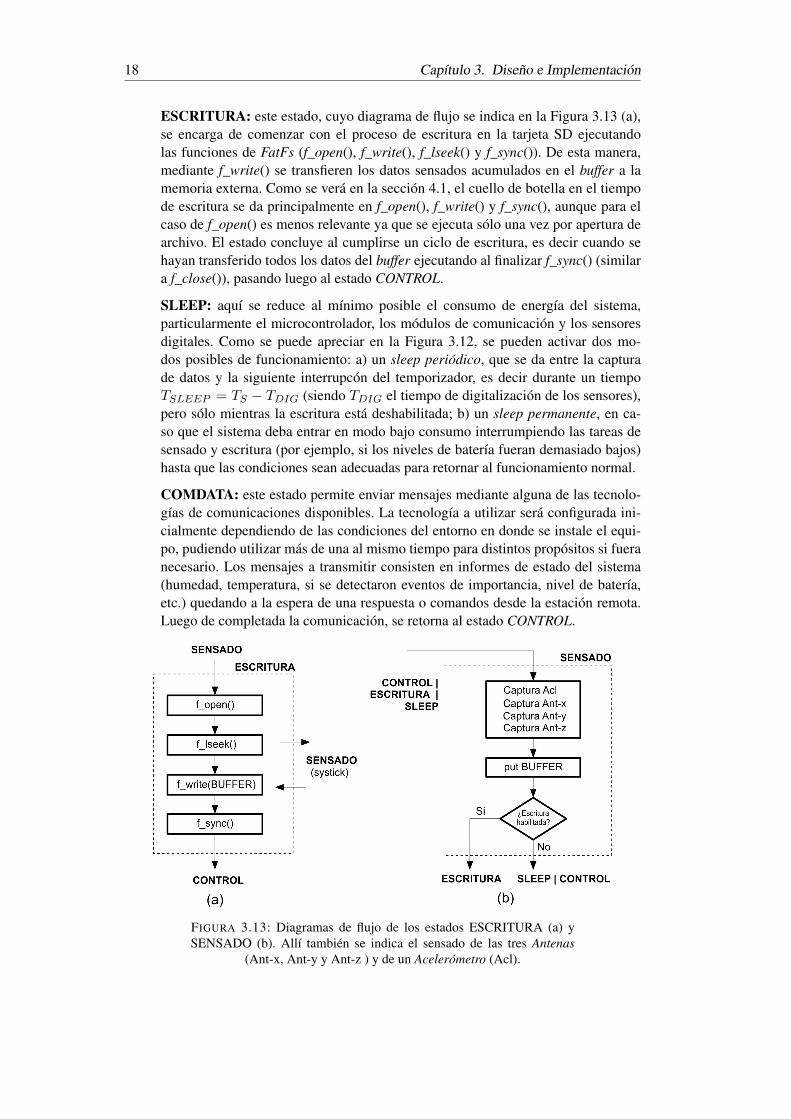
ESCRITURA: este estado, cuyo diagrama de flujo se indica en la Figura 3.13 (a),se encarga de comenzar con el proceso de escritura en la tarjeta SD ejecutandolas funciones de FatFs (f_open(), f_write(), f_lseek() y f_sync()). De esta manera,mediante f_write() se transfieren los datos sensados acumulados en el buffer a lamemoria externa. Como se verá en la sección 4.1, el cuello de botella en el tiempode escritura se da principalmente en f_open(), f_write() y f_sync(), aunque para elcaso de f_open() es menos relevante ya que se ejecuta sólo una vez por apertura dearchivo. El estado concluye al cumplirse un ciclo de escritura, es decir cuando sehayan transferido todos los datos del buffer ejecutando al finalizar f_sync() (similara f_close()), pasando luego al estado CONTROL.
SLEEP: aquí se reduce al mínimo posible el consumo de energía del sistema,particularmente el microcontrolador, los módulos de comunicación y los sensoresdigitales. Como se puede apreciar en la Figura 3.12, se pueden activar dos mo-dos posibles de funcionamiento: a) un sleep periódico, que se da entre la capturade datos y la siguiente interrupcón del temporizador, es decir durante un tiempoTSLEEP = TS − TDIG (siendo TDIG el tiempo de digitalización de los sensores),pero sólo mientras la escritura está deshabilitada; b) un sleep permanente, en ca-so que el sistema deba entrar en modo bajo consumo interrumpiendo las tareas desensado y escritura (por ejemplo, si los niveles de batería fueran demasiado bajos)hasta que las condiciones sean adecuadas para retornar al funcionamiento normal.
COMDATA: este estado permite enviar mensajes mediante alguna de las tecnolo-gías de comunicaciones disponibles. La tecnología a utilizar será configurada ini-cialmente dependiendo de las condiciones del entorno en donde se instale el equi-po, pudiendo utilizar más de una al mismo tiempo para distintos propósitos si fueranecesario. Los mensajes a transmitir consisten en informes de estado del sistema(humedad, temperatura, si se detectaron eventos de importancia, nivel de batería,etc.) quedando a la espera de una respuesta o comandos desde la estación remota.Luego de completada la comunicación, se retorna al estado CONTROL.
FIGURA 3.13: Diagramas de flujo de los estados ESCRITURA (a) ySENSADO (b). Allí también se indica el sensado de las tres Antenas
(Ant-x, Ant-y y Ant-z ) y de un Acelerómetro (Acl).

3.2. Subsistema Digital 19
3.2.2.3. Formato de datos almacenados
Teniendo en cuenta las tasas de muestreo indicadas en la tabla 2.1, algunas magnitudesserán muestreadas cada 5 minutos, mientras que otras deberán capturarse cada 10 ms.Se define entonces como segmento “A” al conjunto de datos muestreados cada 5 minutos:horas (hh), minutos (mm), segundos (ss), campo magnético estático en los tres ejes (MX ,MY , MZ), concentración de gas radón (R), humedad (H), temperatura (T ) y tensiónde alimentación de la batería (V ). En la Figura 3.14 se puede apreciar el ordenamientode estos datos tal cual serán escritos en la micro-SD, donde también se agregan bytesseparadores (0xFF) entre cada dato de tiempo (hh, mm y ss), que a su vez serán usadosen la reconstrucción de los datos, conformando un total de 17 bytes para este segmento.
FIGURA 3.14: Segmento de datos (A) correspontiente a las magnitudessensadas cada 5 minutos, donde <.> indica el número de bits.
Por otra parte para el conjunto de datos sensados cada 10 ms se define el segmento “B”,que incluye: muestras capturadas por las antenas de lazo en los tres ejes (Lx, Ly, Lz) y unamuestra de la aceleración en uno de los ejes (Ax). En la Figura 3.15 se puede apreciar laestructura de este segmento, pero para optimizar el espacio de memoria y no desperdiciarbits, teniendo en cuenta que las capturas de las antenas son de 12 bits (resolución delconversor AD), se escriben las cuatro muestras (tres de las antenas y una de aceleración)en 6 bytes, agrupando 3 nibbles por cada variable como se indica en la Figura 3.15.
FIGURA 3.15: Segmento de datos (B) correspontiente a las magnitudessensadas cada 10 ms.
Luego se define como “bloque” al conjunto de datos de todas las muestras obtenidascada 5 minutos, incluyendo tanto el segmento “A” como todos los segmentos “B” que segeneren dentro de ese intervalo de 5 minutos (en este caso 30000 segmentos B). Es decir,dado que el segmento “A” se repite sólo una vez en este período, el bloque comenzarácon un segmento “A” seguido de 30000 segmentos “B” (“A” y el primer segmento “B”corresponden al mismo instante de muestreo). En la Figura 3.16 se representan variosbloques en secuencia generados cada 5 minutos, totalizando un tamaño de 180 KB porbloque (180017 bytes exactos).

20 Capítulo 3. Diseño e Implementación
FIGURA 3.16: Bloques de datos generados cada 5 minutos, compuestospor un segmento “A” y 30000 segmentos “B”.
Se ha considerado separar la información almacenada en varios archivos, generando unarchivo por hora. Con esta definición, cada archivo contiene 12 bloques (5 min × 12 = 60min), resultando en un tamaño de 2,16 MB por cada archivo. Esto se puede representarclaramente en la Figura 3.17.
FIGURA 3.17: Composición de un archivo/hora generado mediante 12bloques de datos, resultando en un tamaño de 2,16 MB por archivo.
Finalmente, ya habiendo definido el formato de datos y de cada archivo a escribir enla memoria micro-SD, se ha decidido agrupar estos archivos siguiendo la estructura dedirectorios representada en la Figura 3.18, agrupando todos los archivos generados cadauna hora en un directorio semanal. De esta manera, se creará un directorio por semana, elcual contendrá un total de 168 archivos (24 horas × 7 días /semana).
FIGURA 3.18: Estructura de los archivos guardados en la memoriamicro-SD, considerando un directorio por cada semana y 168 archivos
dentro de cada uno.
El formato del nombre para cada directorio se conforma con un primer caracter ’s’ quehace referencia al término “semana”, seguido de tres caracteres para representar el númerode semana correspondiente, comenzando por s001 hasta la semana en la que se retire lamemoria para su análisis. Para los archivos, se utilizan directamente los tres primeroscaracteres del nombre para el número de semana (aunque sea redundante deben conteneresa referencia) y los siguientes tres caracteres para el número de hora (que varía en elrango xxx001-xxx168).

3.3. Subsistema de sensado 21
3.3. Subsistema de sensado
En esta sección se describen algunos detalles específicos de los sensores utilizados enel sistema de adquisición, los que en su conjunto conforman el subsistema de sensado,resumiendo en la tabla 3.2 algunas de las características relevantes de cada uno.
3.3.1. Sensores de campo magnético dinámico (antenas)
Las antenas utilizadas para la medición de perturbaciones mángenticas consisten en unabobina de lazo, como la que se indica en al Figura 3.19. Posee un arrollamiento de cablecon 0,5 mm de espesor, 220 vueltas y un radio de 20 cm. Para establecer la relación entretensión inducida (medida) y campo magnético, podrá calcularse el factor de antena segúnse describe en [21].
FIGURA 3.19: Antena (tipo lazo) utilizada para el sensado de emisionesmagnéticas variables en el tiempo.
También se requieren tres amplificadores de alta ganancia, uno por cada antena. Si bien losamplificadores no se describen en este trabajo ya que no forman parte de su alcance, cabedestacar que poseen una ganancia alrededor de 100 dB, debido a las bajas intensidadesque se esperan captar y una frecuencia de corte de 10 Hz. Para la digitalización se empleóel conversor analógico digital (incluido en el subsistema digital) basado en el circuitoMCP3208 ya comentado en la sección 3.2.1.
3.3.2. Sensor magnetómetro y acelerómetro
Para las mediciones de campo magnético estático y aceleración, se utilizó un sensor basa-do en el circuito integrado MPU9250, Figura 3.20. Este sensor posee una interfaz digitalpara la de comunicación mediante I2C y permite obtener las tres componentes cartesianastanto de campo magnético estático como de aceleración con 16 bits de resolución [22].
FIGURA 3.20: Sensor MPU9250 (magnetómetro y acelerómetro).

22 Capítulo 3. Diseño e Implementación
3.3.3. Sensor de radón
Como se observa en la Figura 3.21, el detector de radón consiste en una cámara cilíndricaexterior (conectada a tierra) que en su interior contiene un filamento conductor mante-niendo éste una diferencia de potencial de 500 VDC con una segunda recamara cilíndricainterior. El filamento está conectado directo a la base de un transistor FET que se activaal excitarse cuando se ioniza el aire en el interior del cilindro debido al ingreso de unapartícula alfa. Luego, mediante un circuito de amplificación, se adapta la señal para queproduzca pulsos (con lógica negativa) por cada partícula alfa detectada. Por consiguiente,para computar la concentración de radón se contabiliza cada flanco descendente desde unpin de entrada digital del LPC1769 actualizando la cantidad de pulsos ocurridos cada cin-co minutos. En este caso, considerando r pulsos/minuto, la concentración de gas resultaa(Rn) = r × 1,9, siendo k/(n× V E) = 1,9 para este detector en particular.
FIGURA 3.21: Detector de radón [23]. Esquema de funcionamiento (a)y fotografía del prototipo a utilizar (b).
3.3.4. Sensor de humedad y temperatura
Para los datos de humedad y temperatura, se utilizó un sensor digital de la serie HIH8000con interfaz de comunicación I2C y 14 bits de resolución [24], Figura 4.7. También se es-pecifica una precisión de ±0.5 ◦C para el sensor de temperatura y ±2 %RH para el sensorde humedad. La captura de ambos datos puede ser actualizada cada 5 minutos, ya que seconsidera tiempo suficiente debido a que son magnitudes que varían muy lentamente.
FIGURA 3.22: Sensor de humedad y temperatura HIH8120.

3.4. Subsistema de comunicaciones 23
3.3.5. Resumen de especificaciones para los sensores
En la tabla 3.2 se indica un resumen de las distintas características de los sensores y cir-cuitos utilizados en el subsistema de senado. Estos requerimientos son fijados por defecto,no obstante en el sistema digital (microcontrolador) se podrán configurar en tiempo realotros valores para algunos de estos parámetros.
TABLA 3.2: Especificaciones de los sensores utilizados, considerando: elcircuito integrado para la digitalización (Dig), la interfaz de digital (Int),
la resolución (Res) y la medición que realizan.
Sensores Dig Int Res Medición
Antenas (x,y,z) MCP3208 SPI 12 bit Campo magnético dinámicoMagnetómetro (x,y,z) MPU9250 I2C 16 bit Campo magnético estáticoAcelerómetro (x) MPU9250 I2C 16 bit AceleraciónDetector de radón LPC1769 GPIO 1 bit Gas radónHigrómetro HIH8120 I2C 14 bit HumedadTermómetro HIH8120 I2C 14 bit Temperatura
3.4. Subsistema de comunicaciones
Si bien la forma de acceder a los datos de sensado acumulados es retirando el dispositivode almacenamiento (memoria micro-SD) del equipo, el sistema además se complementacon distintas tecnologías de comunicación. El propósito de éstas es transferir informaciónde diagnóstico, como el estado de la batería, alarmas, o cualquier otro evento particularque desee determinarse en tiempo real. También se contempla la posibilidad de que elsistema pueda enviar al menos una parte de los datos almacenados durante un intervalode tiempo dado. Claramente carece de sentido transferir en forma continua cada datosensado, ya que se estarían consumiendo valiosos recursos energéticos considerando quela mayor parte del tiempo no habrá registros de señales anómalas o sísmicas presentes. Almismo tiempo, el sistema podrá recibir comandos de manera remota, ya sea para modificartiempos de muestreo, activar o desactivar sensores, forzar el modo de ahorro energético,reajustar la fecha y hora del RTC, solicitar información específica o cualquier tipo deconfiguración requerida. En particular se incluyen para este prototipo las siguientes trestecnologías de comunicaciones: IEEE 802.15.4 Figura 3.23 (a), GSM Figura 3.23 (b) yIEEE 802.3 (Ethernet) Figura 3.23 (c).
FIGURA 3.23: Dispositivos y estándares utilizados para las tres tecnolo-gías compatibles con el sistema: (a) módulo Xbee, (b) módulo SIM800 y
(c) LwIP+LPCXpresso.

24 Capítulo 3. Diseño e Implementación
3.4.1. Tecnología IEEE 802.3
La placa principal incluye una interfaz Ethernet que permitirá la comunicación entre elsistema de adquisición y cualquier otro dispositivo compatible con este estándar. De es-ta manera podrá accederse a la información desde cualquier lugar del planeta medianteuna conexión TCP/IP en caso que la estación de monitoreo disponga de un proveedorde internet, o limitarse específicamente a otros dispositivos conectados al enlace local,Figura 3.24. Si bien una de las desventajas más evidentes es que el equipo podría estarinstalado en zonas muy aisladas, donde no se disponga de una estación cercana para unenlace directo, se ha considerdo incorporar esta tecnología ya que se trata de un estándarcompatible con muchos dispositivos comerciales, lo que le da mayor versatilidad de usoen función del entorno y la disponibilidad de servicio o bien para aprovechar el mismoprototipo reutilizándolo en futuros proyectos.
FIGURA 3.24: Esquema de comunicación mediante 802.3 utilizando unaconexión TCP/IP a través de una red LAN.
3.4.2. Tecnología IEEE 802.15.4
En este caso se utiliza un módulo de comunicación para redes inalámbricas de área perso-nal (WPAN, Wireless Personal Area Networks) compatible con el estándar IEEE 802.15.4,siendo éste la base (capa física y de enlace) de la especificación Zigbee ampliamente uti-lizada en aplicaciones redes de sensores inalámbricas (WSN, Wireless Sensor Networks).Para ello en la placa principal se incorpora un módulo marca Xbee serie S3B, que permi-te una conectividad inalámbrica de largo alcance, hasta 600 m en zonas urbanas y 15,5km en zonas rurales (con línea de visión) [19]. Éste transceiver opera en la banda ISMde 902-928 MHz, con una tasa de datos en el rango de 10-200 kbps, una interfaz serie(UART) para la comunicación con el microcontrolador y modos de bajo consumo paraun uso eficiente de energía, entre otras características. De esta manera, la estación podráubicarse a varios cientos de metros dependiendo de geometría del lugar. Algunas de lasventajas que ofrece este módulo inalámbrico son su simplicidad de uso, bajo consumo,bajo costo económico y disponibilidad en el mercado. No obstante, de acuerdo a la Fi-gura 3.25, la conexión requiere implementar un nodo de acceso (gateway) a la red globalque deberá incluir otro módulo inalámbrico compatible y una interfaz de acceso a la red(Ethernet o GSM).
FIGURA 3.25: Esquema de comunicación mediante un módulo Xbeecompatible con 801.15.4 y su correspondiente nodo gateway.

3.5. Subsistema de alimentación 25
3.4.3. Tecnología GSM
Esta alternativa posee muchas ventajas respecto de las dos anteriores. Por un lado, no re-quiere un servicio convencional de internet en una estación base ni la necesitad del cablea-do que sí se requiere para una red LAN, sino que puede acceder a la red global medianteconexiones TCP/UDP a través de un enlace de telefonía móvil de manera inalámbrica,contratando un servicio de recarga sin la necesidad de un abono mensual y sólo para losdías en que se requiera establecer contacto con el sistema. Además, también puede seraprovechado el servicio de mensajes cortos (SMS). Por otra parte, si se lo compara conXbee, el cual requiere la instalación de un nodo gateway además de un servicio de internetfijo, en este caso el módulo GSM permite la conexión directa a la torre celular en la celdaque de cobertura. Sin embargo, estas ventajas no son tan obvias si el equipo se encuentraen zonas demasiado aisladas (como desiertos, montañas, selvas, o cualquier zona rural sincobertura). No obstante en casos en donde realmente se justifique o sea indispensable lacomunicación, podrá considerarse como último recurso un sistema satelital de baja tasade datos aunque con un costo elevado.
El módulo GSM utilizado (SIM800), Figura 3.23 (b), provee una interfaz de comunicaciónUART para el intercambio de datos con el microcontrolador mediante comandos AT [25].En la Figura 3.26, se representa el esquema básico utilizado con esta tecnología.
FIGURA 3.26: Esquema de comunicación utilizando tecnología GSMpara establecer una conexión TCP/IP.
3.5. Subsistema de alimentación
Uno de los requerimientos más importantes de todo el sistema es su autonomía energética.Esto se debe a que el equipo requiere de períodos muy prolongados de tiempo sin inter-vención humana, que podrían ser varios meses, ya que en la mayoría de los casos estarásituado en lugares despoblados o sin acceso a la red de suministro eléctrico. Por lo tanto,si bien no ha sido implementado en su totalidad para el presente trabajo, es indispensableel desarrollo de un sistema de alimentación optimizado capaz de cubrir estas necesidades.La solución contemplada para este caso se basa en la recolección de energía solar median-te un panel fotovoltaico, que junto a un circuito de fuente y regulación podrán mantenerun ciclo de carga adecuado para la batería y así asegurar su autonomía, garantizando deesta manera el monitoreo permanente desde el subsistema digital.
Como se indica en la Figura 3.27, se utilizarán dos módulos de alimentación separados,uno para los amplificadores de las antenas (sensores analógicos) y otro para el sistemadigital (que incluyen el microcontorlador y los módulos de comunicaciones). La fuentepara los analógicos entrega tanto tierra digital (GND) como analógica (GNDA) y ten-siones continuas de 12 V, +9 V y -9 V, ya que son las requeridas por cada uno de losamplificadores. Por otro lado, la fuente para el subsistema digital solo requiere entregaruna tensión de 3,3 V de continua con su correspondiente tierra digital (GND).

26 Capítulo 3. Diseño e Implementación
FIGURA 3.27: Esquema simplificado del subsistema de alimentación.
El panel solar, que se muestra en la Figura 3.28, es de la marca Luxen modelo LN-30P, po-licristalino de dimensiones 470x510 mm, con una potencia máxima de 30 W, una tensiónde 18,5 V (Pmáx) y corriente de 1,62 A (Pmáx).
El regulador de carga, también indicado en la Figura 3.28, es de la marca Enertik modeloENS-5-12/24, permite una potencia máxima del panel de 75 W (12 V) para baterías tantode ácido como de gel, con un consumo interno inferior a 6 mA.
Para el caso de la batería, se adquirió el modelo UB-450 de la marca Willard, de materialcalcio-plata, 12 V con una carga de 38 Ah, Figura 3.28.
FIGURA 3.28: Panel solar LN-30P, regulador de carga para el panelENS-5-12/24 y batería de 12 V UB-450 de 38 Ah.

3.6. Representación detallada del sistema principal 27
3.6. Representación detallada del sistema principal
En la Figura 3.29 se representa el sistema principal mostrando en detalle cada bloque in-terno que lo compone y el conexionado entre los mismos. También se agregan los bloquesque no forman parte del alcance de este trabajo pero que sí deberán incluirse en el futuro.
FIGURA 3.29: Esquema completo del sistema principal. Aquí se puedeobservar el detalle de cada subsistema y las intefaces digitales utiliza-das por el micorcontrolador para la comunicación con cada uno de los
periféricos externos.


29
Capítulo 4
Ensayos y Resultados
En este capítulo se presenta la verificación de los componentes principales en el subsiste-ma digital y de sensado.
4.1. Verificación de escritura en la tarjeta micro-SD
Como se comentó en la sección 3.2.2, la mayor restricción en el firmware tiene que vercon los tiempos de escritura de la tarjeta micro-SD siendo éstos muy superiores al períodode muestreo (10 ms) que se requiere en el sensado de las antenas y el acelerómetro. Paradeterminar empíricamente estos tiempos se utilizó uno de los contadores internos delmicrocontrolador con el que se midió el tiempo de ejecución de cada una de las funcionesFatFs que intervienen en la escritura y el tiempo total requerido, utilizando un buffer de3,6 KB como fuente de datos a transferir cíclicamente.
Las funciones analizadas son: f_open() (abrir o crear archivo), f_lseek() (mover punteroy expandir archivo), f_write() (transferir datos a la tarjeta) y f_sync() (limpiar datos encache). En la Figura 4.1 se muestran los tiempos de ejecución (en milisegundos) paracada uno de los ciclos de escritura realizados.
0 100 200 300 400 500 600 700
0
100
200
300
400
500
600
700
800
N° de escritura
Tie
mpos d
e e
jecució
n [m
s]
f_lseek()
f_write()
f_sync()
Total
FIGURA 4.1: Tiempos de ejecución para la escritura en la tarjeta vs. Nú-mero de escritura realizada (asumiendo como escritura la transferencia
completa del buffer).

30 Capítulo 4. Ensayos y Resultados
Como se puede apreciar en la Figura 4.1, los tiempos requeridos para f_write() y f_sync()superan ampliamente al tiempo de muestreo del sistema, motivo por el cual no es posibleescribir la tarjeta en cada instante de muestreo y debe recurrirse a un buffer en RAM pararetener los nuevos datos que se van sensando mientras se transfieren los viejos. No ocurrelo mismo con f_lseek() cuyo tiempo de ejecución es despreciable frente al resto. Tambiénes evidente la presencia máximos locales muy elevados que ocurren con cierta periodici-dad, pero sin embargo es importante notar que en general los tiempos registrados no sondeterminísticos y por lo tanto difíciles de predecir. Para cada una de las funciones anali-zadas, en la tabla 4.1 se resumen el valor máximo registrado (TMAX ) y el más probable(TMODA), indicando en éste último también el porcentaje de ocurrencia (asumiendo unatolerancia de ±5 ms). De la misma forma se analiza el tiempo total de escritura (que noes necesariamente la suma de los anteriores).
TABLA 4.1: Escritura de la tarjeta micro-SD: (TMAX ) y (TMODA) de-terminados experimentalmente para cada función y para el tiempo totalde escritura. También se indican los porcentajes de ocurrencia del tiempo
que demora cada función ( %).
Funciones Tmax Tmodaf_lseek() 0,004 ms 0,004 ms 96,8 %f_write() 483 ms 167 ms 64,4 %f_sync() 323 ms 206 ms 62,0 %Todas 643 ms 374 ms 60,7 %
Por otro lado, habiendo definido el tiempo de muestreo en Ts=10 ms, los 6 bytes captura-dos en cada interrupción y un tamaño de buffer de 3,6 KB, el intervalo de tiempo por cadaciclo de escritura (CESC), que es equivalente al tiempo que demora en llenarse el buffer,se puede calcular de acuerdo a la ecuación 4.1.
CESC =3,6KB × 10ms
6B= 6 s (4.1)
A partir de las mediciones de la tabla 4.1, en la Figura 4.2 se representan los resulta-dos obtenidos para el tiempo de escritura total mediante gráficos de barra, indicando allíuna comparación entre TMAX y TMODA en términos de porcentaje referidos al ciclo deescritura.
Se pueden plantear dos criterios para analizar el comportamiento en cuanto al tiempo deescritura total. Por un lado, el TMAX registrado permite tener una noción del tiempo quedemora el proceso de escritura en el peor caso. Según la Figura 4.2 (a), las medicionesindicaron que en las condiciones fijadas, este tiempo resultó ser muy inferior al ciclo deescritura, en particular es un 10,7 % de CESC , garantizando una probabilidad muy bajade pérdida de datos. En cuanto al TMODA, debido a que es el tiempo de escritura másprobable, permite tener una noción de cuánto será el tiempo de no-escritura (TNESC)más frecuente. En consecuencia, dará una idea de la disponibilidad de tiempo para que elsistema entre en el modo de bajo consumo periódico (sleep periódico). Esto es relevanteya que permitirá hacer un análisis cuantitativo del consumo que tendrá el sistema. En estecaso, de acuerdo a la Figura 4.2 (b), el tiempo de escritura más probable abarca sólo enel 6,5 % del ciclo de escritura y tendrá una probabilidad aproximada del 60,7 % (según latabla 4.1) en demorar ese tiempo.

4.2. Verificación de los sensores 31
10,72%
6,23%
89,28%
93,77%
0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
TMAX
TMODA
TESC TNESC
FIGURA 4.2: Porcentaje de utilización del ciclo de escritura CESC =TESC +TNESC , considerando el tiempo de escritura máximo registrado
(TMAX ) y el tiempo de escritura más probable (TMODA).
4.2. Verificación de los sensores
Para verificar el desempeño del sistema de sensado se realizaron diferentes tipos de prue-bas. Por un lado, de manera similar a la escritura de la tarjeta micro-SD, se determinó eltiempo de digitalización de cada sensor, definido como el tiempo requerido para obteneruna lectura y copiarla en el buffer. Por otra parte, también se realizaron capturas de losdatos sensados propiamente dichos para verificar el correcto funcionamiento de los senso-res. Esto se logró generando distintas perturbaciones intencionales observando luego lasvariaciones que presentaba cada muestra sensada.
4.2.1. Tiempos de digitalización
A diferencia de lo que ocurre con los tiempos de escritura en la tarjeta, en el caso de lossensores se verificó que los tiempos de captura, indicados en las tablas 4.2 y 4.3, resultaronconstantes para todas los casos ensayados.
Los tiempos de digitalización registrados para estos sensores pueden agruparse de acuerdoa la instancia de firmware en la que se accede a cada uno. Por un lado, aquellos conuna frecuencia de muestreo de 0,33 Hz (5 minutos de período) utilizados fuera de lainterrupción del timer, requieren los tiempos de digitalización que se indican en la tabla4.2. Este es el caso de sensores como el magnetómetro, humedad, temperatura, detectorde radón y lectura de tensión de la batería, que por tener un período de muestreo de cincominutos no están sujetos a restricciones de tiempo que puedan comprometer el correctofuncionamiento del sistema. Sin embargo deben también caracterizarse para descartarposibles fallas de firmware, hardware o por cualquier modificación de requerimientosque pudiera necesitarse en el futuro. Por otro lado, el segundo grupo abarca a los sensoresde las antenas y del acelerómetro, utilizados dentro de la interrupción del timer, cuyostiempos de lectura se muestran en la tabla 4.3 junto al tiempo de digitalización total. Eneste caso sí resulta sumamente importante hacer una caracterización temporal dado quedeben sensarse dichas magnitudes dentro del intervalo de 10 ms que define el tiempo demuestreo. Básicamente debe garantizarse que el tiempo de digitalización total (TDIG) deestos cuatro sensores (tres para las antenas y una de aceleración) sea menor al tiempo demuestreo.

32 Capítulo 4. Ensayos y Resultados
Sensor Magnetómetro/Acelerómetro (MPU9250): el campo magnético estático yla aceleración se obtienen a través del mismo circuito (MPU9250), sin embargointernamente poseen características distintas y los tiempos de conversión no sonnecesariamente iguales, más allá que el tiempo de transferencia de datos sea el mis-mo. Por este motivo se midieron de manera separada los tiempos de digitalizaciónde ambas magnitudes. Para el caso de la aceleración, dado que se decidió medir lasvariaciones en un único eje de coordenadas, se capturó la componente AX (acele-ración eje-x). Por el lado del magnetómetro, se computó el tiempo requerido parala lectura de las tres coordenadas MX , MY y MZ (campo magnético ejes-xyz), te-niendo en cuenta que estas tres componentes se obtienen en una única lectura porla interfaz I2C del microcontrolador.
Sensores analógicos (MCP3208): el conversor analógico digital MCP3208 se uti-liza principalmente para obtener muestras de las emisiones de campo magnéticodinámico captado por las antenas a una frecuencia de 100 Hz, que son en sí la mag-nitud clave para los objetivos de la investigación pretendida. Para ello se utilizantres canales (CH0, CH1 y CH2). El otro canal utilizado (CH3) para sensar el ni-vel de batería cada cinco minutos, no es relevante debido a la baja frecuencia demuestreo que se requiere en este caso.
Sensor de Humedad/Temperatura (HIH8120): para las muestras de humedad ytemperatura, ambas magnitudes se obtienen en una sola lectura del sensor medianteuna de las interfaces I2C disponibles. Al igual que el magnetómetro y el nivel debatería, tampoco implica mayor relevancia ya se limita a un muestreo de cincominutos de período.
Detector de Radón: este caso particular no requiere de ninguna prueba experi-mental debido a que el detector funciona simplemente contando pulsos durante unintervalo de cinco minutos, guardando esa cuenta como un número entero con elque se podrá determinar la concentración de gas en caso que sea detectado. Enconsecuencia el tiempo requerido es comparable sólo a nivel de instrucciones delmicrocontrolador y muy inferior a los tiempos del resto de los sensores.
TABLA 4.2: Tiempos de digitalización de los sensores utilizados cada 5minutos (fuera de la interrupción de timer).
Magnitud Sensor Tiempo de digitalizaciónTensión de batería MCP3208 78 µsCampo magnético estático (x,y,x) MPU9250 269 µsHumedad y temperatura HIH8120 658 µs
TABLA 4.3: Tiempos de digitalización de los sensores utilizados cada 10ms (dentro de la interrupción de timer).
Magnitud Sensor Tiempo de digitalizaciónCampo magnético dinámico (x,y,z) MCP3208 234 µsAceleración (x) MPU9250 143 µsTodas MCP3208/MPU9250 TDIG=377 µs

4.2. Verificación de los sensores 33
Basándose en los datos de la tabla 4.3, para las capturas realizadas dentro de la inte-rrupción de timer (cada 10 ms), el tiempo de digitalización total (TDIG) de las cuatromagnitudes es muy inferior al período de muestreo, como se observa en la Figura 4.3.Esto significa que el sistema sólo requiere el 3,77 % (377 µs) del intervalo de mues-treo para realizar el sensado de más alta frecuencia. En consecuencia existe un tiempode inactividad TSLEEP = 9, 62 ms que es aprovechado para que el sistema entre en elmodo de bajo consumo (lo que en la máquina de estados se denominó sleep periódi-co) durante el 96,23 % del tiempo total entre interrupciones de timer, verificándose queTS = TDIG + TSLEEP . Este resultado es importante no sólo porque satisface las restric-ciones de tiempo en el muestreo, sino también porque deja un intervalo muy holgado entrela última lectura y la siguiente interrupción, aprovechando este tiempo para el ahorro derecursos energéticos. No obstante, el sistema podrá ingresar en este modo de bajo consu-mo durante el 96,23 % del tiempo sólo cuando la escritura de memoria esté deshabilitada,durante el intervalo TNESC indicado en la Figura 4.2.
96,23%
0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
TDIG
MPU-Ax MCP-CH0 MCP-CH1 MCP-CH2 TSLEEP
FIGURA 4.3: Porcentaje de tiempos de digitalización utilizados para lossensores respecto del tiempo de muestreo: acelerómetro (MPU-Ax) y lostres canales del conversor analógico digital para las antenas (MCP CH0,CH1, CH2), resultando un tiempo de inactividad TSLEEP = 0, 962×TS .
4.2.2. Lecturas registradas
Se efectuaron diversas pruebas con los distintos sensores del sistema de manera tal deverificar que los datos obtenidos sean coherentes con las variables físicas esperadas. Enparticular para los sensores cuyos datos se obtienen mediante las interfaces de comunica-ción SPI e I2C del micrcontrolador, se debe chequear la adecuada configuración de dichosperiféricos, direccionar y acceder correctamente a los sensores e interpretar bien las lec-turas teniendo en cuenta que el resultado del sensado se transfiere al menos en dos bytes(parte alta y parte baja) y con un corrimiento de bits dependiendo del formato definido encada sensor. Por ejemplo, para al conversor MCP3208 sólo son válidos 12 bits de los dosbytes recibidos [14]. Para el MPU9250 se utilizan 2 bytes completos por cada variable.En este caso fue necesario además realizar una configuración de cierta complejidad parainicializar las distintas opciones de este dispositivo [26]. Por su parte, en el HIH8120 de-ben interpretarse 14 bits tanto para la temperatura y como para la humedad, de un total de4 bytes leídos [27].
En las Figuras 4.4, 4.5, 4.6 y 4.7 se muestran algunas capturas realizadas con los sensoresmencionados y una breve descripción de cada experiencia.

34 Capítulo 4. Ensayos y Resultados
4.2.2.1. Sensado de señales analógicas
Para el conversor MCP3208 se utilizó una única fuente de señal como entrada analógicaimplementada a modo de prueba con un potenciómetro que entrega una tensión variableen el rango de 0-3,3 V. El resultado se puede apreciar en la Figura 4.4 para los cuatrocanales utilizados aplicando la misma señal de forma simultánea en sendos canales. Comose puede observar, las lecturas tomadas del conversor y posteriormente escaladas paravisualizarlas con un fondo de escala de 3,3 V, son coherentes con los niveles de tensiónaplicados en cada entrada analógica. Asimismo se puede apreciar que todos los canalesregistraron exactamente la misma señal, por lo que no se observan diferencias de sensadoentre canales.
0 100 200 300 400 500 600 700 8000
2
4
Muestras
Te
nsió
n [
V]
CH0
0 100 200 300 400 500 600 700 8000
2
4
Muestras
Te
nsió
n [
V]
CH1
0 100 200 300 400 500 600 700 8000
2
4
Muestras
Te
nsió
n [
V]
CH2
0 100 200 300 400 500 600 700 8000
2
4
Muestras
Te
nsió
n [
V]
CH3
FIGURA 4.4: Conversor analógico digital MCP3208. Se indican lasmuestras capturadas para los canales CH0, CH1, CH2 y CH3 (norma-
lizadas a la tensión de referencia Vref=3,3 V).

4.2. Verificación de los sensores 35
4.2.2.2. Sensado con magnetómetro
Para el magnetómetro se obtuvieron muestras de los tres ejes de coordenadas induciendouna variación de campo magnético mediante el acercamiento y alejamiento de un imánhacia el sensor, observándose los resultados de la Figura 4.5. Para la Figura 4.5 (a) semuestran los datos registrados en unidades de micro-tesla (µT ) observando una variaciónsignificativa del campo. En el caso de la Figura 4.5 (b), se muestra una versión ampliadade (a) para observar las muestras tomadas durante los instantes en los que no se aplicóun campo magnético intencionalmente, apreciándose que las tres componentes estáticasregistran sólo unas decenas de µT . Sin embargo puede notarse que la resolución no essuficiente para detectar las pequeñas variaciones de campo en el orden de los nT que sípodrían detectarse con las antenas de lazo. De hecho, de acuerdo a las especificacionesdel fabricante, la resolución de este magnetómetro se limita a ±0, 15µT [22].
0 50 100 150 200 250 300 350 400−4000
−3000
−2000
−1000
0
1000
2000
3000
4000
Ca
mpo
Ma
gn
ético [
µT
]
Muestras
(a)
0 10 20 30 40 50 60 70 80 90 100
−30
−20
−10
0
10
20
Muestras
Ca
mp
o M
ag
né
tico
[µ
T]
(b)
MX
MY
MZ
MX
MY
MZ
FIGURA 4.5: Muestras tomadas del magnetómetro MPU9250 para lostres ejes de coordenadas (x,y,z), aplicando un campo intencionalmente(a) y sin aplicarlo (b). Los resultados están normalizados en unidades de
µT (fondo de escala ±4800µT).

36 Capítulo 4. Ensayos y Resultados
4.2.2.3. Sensado con acelerómetro
Respecto al acelerómetro, dado que sólo será sensado en uno de sus ejes, se obtuvieronlas capturas de la Figura 4.6, en donde se generaron pequeños golpes sobre una mesa endonde se ubicaba el sensor fijado con cinta adhesiva a la misma. En la figura puede notarseque las muestras poseen un valor medio de aproximadamente 0, 2 g. Esto se debe a queel eje-x del acelerómetro estaba levemente inclinado, registrando de manera constanteuna fracción de la aceleración de la gravedad a la que se superponen las vibracionesintencionales.
0 50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Ace
lera
ció
n [
g]
Muestras
FIGURA 4.6: Aceleración obtenida para el eje x con el sensor MPU9250.Las lecturas están en unidades de g (gravedad).
4.2.2.4. Sensado de humedad y temperatura
Para el sensor de humedad y temperatura, cuyas lecturas se indican en la Figura 4.7,se generó una variación de dichas magnitudes aplicando aire caliente y frío a diferentesdistancias del mismo, verificando de esta manera su funcionamiento.
200 400 600 800 1000 1200 1400
25
30
35
40
Hum
edad [%
RH
]
Muestras200 400 600 800 1000 1200 1400
25
30
35
40
Tem
pera
tura
[°C
]
Humedad
Temperatura
FIGURA 4.7: Humedad y temperatura registrada con HIH8120, para latemperatura en oC y la humedad en %RH.

4.3. Diagramas de tiempo y funcionamiento general 37
4.3. Diagramas de tiempo y funcionamiento general
Luego de haber definido y analizados los tiempos de las distintas etapas y estados para elflujo general del programa, en la Figura 4.8 se resumen los diferentes tiempos y accionesdel sistema en pleno funcionamiento. Allí se indican en el eje vertical los distintos estadosy elementos de memoria utilizados y cómo varían a lo largo del tiempo.
TNESC
TSLEEP
TD
IG
TD
IG
TD
IG
TD
IG
TSLEEP
TESC TESC TNESC
CESC = 6 s
MAIN
INTERRUP.
BUFF-AUX
BUFFER-SD(3,6 KB)
Tiempo de digitalización
Tiempo disponible parasleep periódico
Escritura de buffer
Lectura de Buffer
Tiempo de no-escritura(disponible para sleep)
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
600 interrupciones
f_write f_syncf_lseek
Tiempo de escrituraen la tarjeta
TS =10 ms
INTERRUP.(AMPLIADO)
BUFFER-SD(3,6 KB)
BUFF-AUX
INTERRUP.
h:m:sMx My MzH T V
Sensado fuerade interrupción
FIGURA 4.8: Diagramas de tiempo para el funcionamiento general.
De la Figura 4.8, en (a) se representan (fuera de escala) los instantes de interrupcióndel timer, diferenciando aquellos que transcurren mientras la escritura de la tarjeta es-tá habilitada (blancos) y deshabilitada (grises), indicando también que se requieren 600interrupciones por cada ciclo de escritura.
38 Capítulo 4. Ensayos y Resultados
En (b) se muestran los intervalos definidos como TESC (tiempo de escritura) y TNESC
(tiempo de no escritura) siguiendo el flujo de del programa principal (MAIN). En particu-lar se destaca que la duración del ciclo de escritura esCESC = 6 segundos (600×10ms).También se indican los instantes de muestreo de las variables de baja tasa, que son los da-tos de tiempo (hh:mm:ss), magnetómetro (MX ,MY ,MZ), acelerómetro (AX ), humedad(H), temperatura (T ) y tensión de la batería (V ), registrados inmediatamente después definalizada la escritura en la tarjeta.
Por otro lado, en (c) se indica un buffer auxiliar (BUFF-AUX) el cual es empleado paraguardar temporalmente lo datos sensados en cada interrupción mientras el buffer principalde 3,6 KB (BUFFER-SD), indicado en (d), es utilizado por las funciones de escritura parala tarjeta. Como se puede apreciar en estos diagramas, las zonas pintadas muestran lacarga (rojo oscuro) y descarga (rojo claro) de datos en los buffers conforme transcurre eltiempo.
En (e) y (f) se muestran los diagramas anteriores ampliados donde se destacan distintosinstantes. Por un lado, mientras se ejecutan las funciones f_lseek(), f_write() y f_sync(),BUFFER-SD sólo está disponible para lectura hasta un instante previo a la finalizaciónde TESC , tal que antes de la próxima interrupción se carguen todos los datos acumula-dos en BUFF-AUX a BUFFER-SD, de manera tal que a partir de ese momento los datoscontinúen su carga en BUFFER-SD, manteniendo de esta manera un ciclo continuo demuestreo y escritura de dichos datos en tarjeta, más allá de los elevados tiempos de escri-tura.
Finalmente en (g) y (h) se muestran más en detalle los instantes de muestreo en la inte-rrupción del temporizador, destacando en color amarillo los tiempos requeridos para ladigitalización de los sensores y en gris los intervalos de tiempo que serán usados en elmodo sleep periódico disponibles para el ahorro de energía.

39
Capítulo 5
Conclusiones
5.1. Conclusiones generales
En este trabajo se presentó el diseño e implementación de un sistema de adquisición de da-tos orientado al estudio de fenómenos sísmicos. El desarrollo forma parte de un proyectode investigación al que se le brinda un aporte significativo, ya que el prototipo realizado esel elemento principal de la estación de monitoreo que se utilizará en esta investigación. Laparte que incumbe a este trabajo se refiere a un módulo digital cuyo propósito principal desensar distintos parámetros del entorno y garantizar una grabación continua de los datosen una tarjeta de memoria externa. El sistema fue diseñado de manera tal de minimizar elconsumo de energía y asegurarse la mínima probabilidad de pérdida de datos. También seincorporaron distintas tecnologías de comunicaciones que le permiten establecer contactode manera remota y de esta forma verificar el estado del sistema, enviar comandos parasolicitar información adicional o bien reconfigurarlo.
5.2. Resultados
En cuanto a los resultados obtenidos se puede mencionar que uno de los mas importantestiene que ver con los tiempos de escritura de la memoria externa. Allí se comprobó queen el modo de transferencia SPI, entre el microcontrolador y la tarjeta, los tiempos deescritura eran excesivamente altos, con picos de 643ms. Esto implicaba la imposibilidadde tomar mediciones y escribirlas antes del siguiente instante de muestreo de 10ms. Noobstante, se desarrolló un firmware capaz de mitigar este problema utilizando un buffer dememoria RAM para retener los datos durante suficiente tiempo hasta completar cada es-critura. De hecho, el tamaño del buffer fue sobredimensionado y fijado en 3,6 KB no sólopara asegurar la captura de datos durante la escritura de la tarjeta, sino también garantizarun tiempo de inactividad en la escritura mucho mayor, permitiendo que el microcontrola-dor pueda entrar en un modo de bajo consumo más prolongado. Por otra parte, tambiénse analizaron los tiempos de digitalización de todos los sensores y en particular de aque-llos cuya frecuencia de muestreo es de 100 Hz. Los resultados indicaron que en todos loscasos, los tiempos de digitalización son mucho menores que el tiempo de muestreo. Enparticular, para el tiempo total requerido por los cuatro sensores principales se obtuvo quesólo se necesita el 3,77 % del tiempo de muestreo para esa digitalización. Esto implicaque en cada intervalo de muestreo el 96,23 % del tiempo estará disponible el modo debajo consumo. En cuanto a los valores registrados por los sensores, se verificaron lecturascorrectas en todos los casos.

40 Capítulo 5. Conclusiones
5.3. Conceptos generales adquiridos
A lo largo del desarrollo de este trabajo se han abarcado y llevado a la práctica diferen-tes conceptos desarrollados durante toda la carrera. Entre ellos se pueden mencionar lossiguientes.
El diseño de circuitos impresos, tanto en el manejo de herramientas de softwarecomo de distintas metodologías de fabricación.
Desarrollo de software, arquitecturas y modelos de programación.
Manejo de periféricos e interfaces de comunicaciones en microcontroladores.
Herramientas para el control de versiones y repositorios.
Planificación de proyectos, tanto estructurados como con metodologías ágiles.
Conceptos de sistemas críticos para fallas de hardware y firmware.
5.4. Conceptos particulares aplicados
Como casos particulares, el aprendizaje resultante de este trabajo permitió adquirir nuevaexperiencia en diferentes conceptos, tecnologías y dispositivos estudiados. Algunos deellos se mencionan a continuación.
Tecnologías de comunicaciones
• Módulos inalámbricos basados en 802.15.4 (XBee).
• Módulo GSM (SIM800).
• Stack LwIP-TCP/IP para LPC1769.
Sensores
• Sensor MPU9250 utilizado como magnetómetro y acelerómetro (interfaz I2C).
• Conversor analógico digital MCP3208 (interfaz SPI).
• Sensor HIH8120 para humedad y temperatura (interfaz I2C).
• Sensor de radón (detección de partículas alfa).
• Antenas de campo magnético.
Medios de almacenamiento
• Manejo de memorias SD en modo SPI mediante la biblioteca FatFs.
• Manejo de almacenamiento masivo (Pendrive) mediante interfaz USB em-pleando la biblioteca FatFs (esta opción finalmente se probó como medio al-ternativo pero no se incluyó en este trabajo).

5.5. Trabajos futuros 41
5.5. Trabajos futuros
Como trabajos futuros pueden mencionarse, por un lado, aquellos que forman parte deeste proyecto pero que no se contemplaron dentro del alcance de este trabajo y que semencionan a continuación.
Caracterizar y optimizar el consumo energético, no sólo por firmware, sino tambiénpor hardware.
Calibración de los sensores, tanto los digitales como también las antenas con susrespectivos amplificadores y el detector de radón.
Realizar pruebas con el sistema funcionando de manera autónoma pero en condi-ciones controladas durante varias semanas. Esto pretende determinar posibles fallasde firmware o hardware.
Diseñar la estructura y el montaje de la estación de monitoreo. Se incluyen gabine-tes, cámaras herméticas, descargadores gaseosos, instalación de panel fotovoltaico,protección contra lluvia, insectos y vandalismo.
Por otro lado, en los siguientes ítems se contemplan posibles mejoras que podrían apli-carse a este primer prototipo o a futuros desarrollos.
Utilización de un microncontrolador de mayores prestaciones.
Uso de un sistema operativo para sistemas embebidos de bajos recursos.
Uso de tecnología 3G para las comunicaciones por red celular.
Uso de otras tecnologías inalámbricas de bajo consumo, como por ejemplo LoRa.
Estudio sobre otros sistemas de almacenamiento de datos con mayor capacidad.
Finalmente, uno de los trabajos futuros planificado para el proyecto asociado a este tra-bajo, es la instalación del equipo en una zona con frecuente actividad sísmica. El lugarestá situado en la región de la puna, provincia de Catamarca, en las cercanías del puebloAntofagasta de la Sierra. La región se indica en la Figura 5.1, y se prevé arribar junto aun equipo de geólogos con experiencia de investigación en esa zona particular.
FIGURA 5.1: Zona donde se pondrá a prueba la estación de monitoreo.Lugar: Antofagasta de la sierra, provincia de Catamarca, Argentina.


43
Bibliografía
[1] Dewey James y Byerly Perry. «History of Seismometry (to 1900)». En: Bulletin ofthe SSA Vol. 59, No. 1, pp. 183-227 (1969).
[2] Bob Shannon. «Vibration measurement systems and guidelines for centrifugalfans - A field perspective». En: AMCA International Engineering Conference LasVegas, NV, USA 2 – 4 March (2008).
[3] Motoji Ikeya. «Earthquakes and Animals: From Folk Legends to Science». En:World Scientific Publishing Co. Pte. Ltd. 5 Toh Tuck Link, Singapore 596224(2004).
[4] T. Bleier y F. Freund. «Ground-based and space-based electromagneticmonitoring for pre-earthquake signals». En: IEEE Spetrum (2005), págs. 1-8.
[5] J. Rosen. «Can electric signals in Earth’s atmosphere predict earthquakes?» En:DOI: 10.1126/science.aae0148, Science (2015). DOI:DOI:10.1126/science.aae0148.
[6] H. V. Alvan y Azad F. H. «Satellite remote sensing in earthquake prediction. Areview». En: National Postgraduate Conference (NPC), 2011 (). DOI:DOI:10.1109/NatPC.2011.6136371.
[7] D. Karakelian y col. «A Transportable System for Monitoring Ultra LowFrequency Electromagnetic Signals Associated with Earthquakes». En:Seismological Research Letters 71.4 (2000), págs. 423-436.
[8] E. Maffia y col. «Medición de la Resonancia de Schumann». En: Latinmag Letters1.A02 (2011), págs. 1-8.
[9] W. H. Campbell. «Concurrent equatorial and high-latitude geomagneticpulsations». En: Radio Science 4.9 (1969), págs. 859-868.
[10] M. Hata y S. Yabashi. «Pre and After-Sign Detection of Earthquake Through ELFradiation». En: Geoscience and Remote Sensing Symposium, 1993. IGARSS ’93.Better Understanding of Earth Environment., International ().
[11] T. Bleier y col. «Ground-based and space-based electromagnetic monitoring forpre-earthquake signals». En: Earthquake Prediction Studies: SeismoElectromagnetics (2013), págs. 1-15.
[12] Paul Neher. «Radon Monitor». En: Electronics Now (1994), págs. 56-70.[13] Patrik Richon y J. C. Sabroux. «Radon anomaly in the soil of Taal volcano, the
Philippines: A likely precursor of the M 7.1 Mindoro earthquake (1994)». En:Geophysical Research Letters (2003).
[14] Microchip Technology Inc. 2.7V 4-Channel/8-Channel 12-Bit A/D Converterswith SPITM Serial Interface, year = 2002.
[15] NXP Semiconductors. LPC176x/5x User manual. 19 December 2016. URL:https://www.nxp.com/docs/en/user-guide/UM10360.pdf.
[16] NxP Semiconductors. LPCXpresso LPC1769 rev B, note = 2011,[17] NXP Semiconductors. LPCOPEN v2.16 Drivers, Middleware and Examples.
Disponible: 2016-06-25. URL: http://www.nxp.com/products/microcontrollers-and-processors/arm-processors/lpc-cortex-m-mcus/software-tools/lpcopen-libraries-and-examples:LPC-OPEN-LIBRARIES.

44 BIBLIOGRAFÍA
[18] Adam Dunkels. «Design and Implementation of the lwIP TCP/IP Stack». En:Swedish Institute of Computer Science (2001).
[19] Digi International Inc. «XBee-PRO 900HP/XBee-PRO XSC RF Modules». En:User Guide (2014).
[20] FatFs - Generic FAT Filesystem Module. URL:http://elm-chan.org/fsw/ff/00index_e.html.
[21] Walter Fano and Ramiro Aloso and G Quintana. El campo magnético generadopor las bobinas de Helmholtz y su aplicación en la calibraciónde sondas, url =elektrón http://elektron.fi.uba.ar/index.php/elektron, note = 2017,
[22] InvenSense Inc. MPU-9250 Product Specification Revision 1.0, note = 2014,[23] Edgardo Maffia. «Diseño e implementación de un detector de gas radón basado en
el ocnteo de partículas alfa». En: Universidad de Buenos Aires ().[24] Honeywell. Honeywell HumidIcon Digital Humidity/Temperature Sensors,
HIH8000 Series. May 2015.[25] SimCom. SIM800 Hardware Design V1.08. 2015.[26] InvenSense Inc. MPU-9250 Register Map and Descriptions Revision 1.4, note =
2013,[27] Honeywell. I2C Communication with the Honeywell HumidIconTM Digital
Humidity/Temperature Sensors, note = June 2012,