sistema automÁtico remoto para el cuidado de...
TRANSCRIPT
SISTEMA AUTOMÁTICO REMOTO PARA EL CUIDADO DE CULTIVOS
CEREALES (FRIJOL Y ARVEJA)
Nilson Gamba Castelblanco - 20062005007
Universidad Distrital Francisco José de Caldas
Facultad de ingeniería
Bogotá, 2015
2
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
SISTEMA AUTOMÁTICO REMOTO PARA EL CUIDADO DE CULTIVOS
CEREALES (FRIJOL Y ARVEJA)
Nilson Gamba Castelblanco - 20062005007
Director: Julián Camargo López
Línea de investigación: Automatización y Bioingeniería
Universidad Distrital Francisco José de Caldas
Facultad de ingeniería
Bogotá, 2015
3
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
TABLA DE CONTENIDO
Pág.
1. INTRODUCCIÓN……………………………………………………………………………………………….…………….4
1.1Justificación………………………………………………………………………………………………….………........6
2. Objetivos………………………………………………………………………………………………………….……………7
2.1. Objetivo General…………………………………………………………………………………………….…………...7
2.2. Objetivos Específicos……………………………………………………………………………………….…………..7
3. Marco Teórico………………………………………………………………………………………………………..….........8
3.1. Factores que influyen en el cultivo …………………………………………………………………..……..…………8
3.2. Agua …….…………………………………………………………………………….………………………....………8
3.3. Clima ……………………………………………………………………………………………………………..........10
3.4. Suelo ………………………………………………………………………………………………..………………….11
3.5. Tipos de riego..…..…………………………………………..……………………………….………………………..22
3.6. Generalidades del riego por goteo………….…………..……………………………………………..……………..25
3.7. Selección de componentes del sistema de riego……………………………………………………..…………….27
3.8. Selección de componentes electrónicos del sistema de automatización………………………………………..29
3.9. Antecedentes…………………………………………………………………………………………………………...32
4. Metodología…………………………………………………………………………………………………………….……38
4.1 Tipo de investigación y enfoque investigativo…………………….………………..……………………………….39
4.2 Estudio del lugar…………………………………………..……………………………………………………….…..41
4.3 Distribución del terreno………………………………………………………….....................................................42
4.4 Diseño……………………………………...........................................................................................................45
5. Resultados y Discusión………………………………………………………………………………………………..…...68
5.1 Implementación en campo…………………………………..………………………………………………….…….68
5.2 Diseño del proyecto.……………………………………………………………………….………………………….71
6. Análisis de mercado…………………………………………………………………………………………………….…..79
7. Conclusiones…………………………………………………………………………….…………………………………..84
8. Anexos………………………………………………………………………………………………..Archivo Digital Anexos
9. Bibliografía………………………………………………………………………………………………….………………..86
10. Cronograma…………………………………………………………………………………………………...……………..91
4
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
1 INTRODUCCIÓN
Con la información suministrada por diferentes publicaciones relacionadas con el tema, se desea realizar el
diseño y por consiguiente la instalación de un sistema automático de regadío por goteo, que a su vez
permita también el riego de insecticidas o fungicidas de manera remota, para un cultivo cereal (frijol y
arveja). Que dicho sistema permita gestionar tiempos de riego, visualizar y mantener un nivel de humedad
en el suelo, controlar la cantidad de ciclos de riego tanto de insecticidas como fungicidas.
Este proyecto se enfoca en la importancia que se le deben dar a los cultivos para lograr cosechas de
calidad y bajo costo, para mercados cada vez más competitivos, de ahí el diseñar sistemas que permitan
cultivos tecnificados donde se controlen todos los procesos requeridos para tener una buena cosecha,
controlando la humedad, fungicidas, insecticidas y las cantidades de fertilizantes de manera que todas las
plantas reciban un trato controlado y por ende su crecimiento sea el esperado.
Lo importante es lograr que los espacios de siembra sean mejor aprovechados, ya que a nivel nacional los
suelos aptos para la agricultura son del 13% y solamente se utilizan el 4% ya sea por problemas de
conflicto interno, calamidades de tipo invernal o sequía que ocurren en algunas épocas del año. Por esta
razón la importancia de generar y diseñar sistemas que mejoren la agricultura del país [1].
Con ayuda de varios sensores de humedad instalados en el cultivo y el diseño de un circuito de control
(micro controlador), se espera que los datos viajen del sensor al procesador y por consiguiente sean
enviados a un ordenador (PC) a través de un módulo de transmisión de datos conocido como ZigBee.
Cuando los datos ya hayan llegado al ordenador (PC) el usuario visualizara en la pantalla los niveles de
humedad y temperatura del cultivo, del mismo modo podrá seleccionar el tipo de riego en el cultivo, ya sea
por tiempos o por niveles de humedad, de igual manera seleccionar la cantidad de ciclos de riego de
insecticidas y fungicidas.
Si el usuario elige la opción de riego por niveles de humedad, automáticamente el ordenador establecerá si
el cultivo esta en los niveles de humedad ideales definidos por el usuario, de no ser así permitirá o limitara
el paso de agua al cultivo para llegar a dichos niveles establecidos, todo esto gracias a la ayuda de los
datos suministrados por sensores ubicados en el terreno, que enviaran la información al ordenador el cual
5
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
dará las ordenes correspondientes para compensar el nivel de humedad.
En caso que el usuario elija un riego por tiempos, establecerá el tiempo de riego en el ordenador y este a
su vez enviara la señal de apertura a la válvula (solenoide) que permitirá el flujo de agua, en la instalación
de riego. El control de flujo de agua se hará por medio de una válvula solenoide, que con señales del
sistema permitirá el paso o no del agua (cierre y apertura), este sistema de riego también puede utilizarse
para ser conectado a un tanque de fertilizante líquido y así poder hacer riego por medio del mismo sistema
de goteo.
Para los ciclos de riego de insecticidas y/o fungicidas se utilizara un armazón en el cual va un pequeño
“carrito” que se moverá paralelamente a los surcos de siembra regando los químicos, y haciendo
movimientos de ida y retorno (ciclos) los cuales son definidos por el usuario en el ordenador. En todo el
tiempo de trabajo y cuidado del cultivo se realizaran registros fotográficos semanales de la evolución del
cultivo comparándolo con un cultivo tratado de forma tradicional con y sin sistema de riego por goteo.
El objetivo principal es lograr que el sistema aumente tanto la calidad del producto como su producción
comparada con el método tradicional, de igual manera reducir el consumo de energía, agua y fertilizantes
son unos de los alcances que se esperan con la implementación del prototipo, permitiendo así corregir
errores, y buscar las mejores alternativas de ubicación de sensores y válvulas para que tener un cultivo
altamente rentable. Una de las limitaciones que se podrían evidenciar en este proyecto será la extensión
que pueda cubrir este mismo, desde el punto de vista de la fumigación de insecticidas y fungicidas, ya que
le prototipo no cubre un área muy grande, y si se quisiera aumentar su cobertura el costo sería muy
elevado, sería recomendable para pequeños cultivos o parcelas.
6
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
1.1 JUSTIFICACIÓN
La implementación de un sistema automático remoto para el cuidado de cultivos cereales (aunque se
puede pensar en muchos otros cultivos) dará la oportunidad de minimizar el gasto de agua,
fertilizantes, fungicidas, insecticidas y electricidad, ya que se gestiona el cuidado de los cultivos de
manera remota y sincroniza los tiempos de riego con los datos proporcionados por los sensores. Este
sistema además permite explorar nuevas tecnologías en al área y así optimizar los sistemas manuales
actualmente utilizados en el país.
La finalidad de este proyecto es evaluar primeramente cada una de las características que hacen
productivo, sano y rentable a un cultivo, con base a ello se diseña un sistema que controle los tiempos
de regadío que las plantas requieren, dependiendo la humedad del suelo y la integridad de la planta,
para así mejorar la cantidad y calidad de la cosecha, y evitar el daño del cultivo ya sea por el exceso o
falta de agua, fertilizantes y/o químicos.
Este proyecto busca emplear los conocimientos adquiridos durante el ejercicio formativo propio en las
áreas de bioingeniería, Digitales III, electrónica industrial e instrumentación industrial, en procura de la
elaboración del diseño de un prototipo automático remoto para el cuidado de cultivos y por
consiguiente su implementación en un cultivo cereal (frijol y arveja).
La secuencia del proyecto tiene como fin mejorar, valorar y optimizar la cantidad y calidad de la
cosecha en el cultivo cereal (frijol y arveja) economizando la mayor cantidad de agua, fertilizantes y
químicos suministrados a las huertas, esto para evitar el gasto desmedido de recursos en este y otros
cultivos.
El beneficio de este proyecto trae consigo mejoras económicas en un principio en la finca en la cual se
va a implementar, pero se espera en un futuro beneficios económicos en la agricultura colombiana, si
se impulsan estos proyectos que buscan el crecimiento agropecuario del país, y así lograr economizar
gastos de electricidad por uso de motobombas y gasto desmedido del agua y otros recursos.
7
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
2 OBJETIVOS
2.1 Objetivo General:
Diseñar e implementar un sistema que automatice un cultivo cereal (frijol y arveja) para valorar y
optimizar su rendimiento
2.2 Objetivos específicos:
Investigar los niveles de humedad y temperatura apropiados para el crecimiento y desarrollo de un
cultivo cereal (frijol y arveja), como a su vez las válvulas e implementos hidráulicos para la
elaboración del sistema a bajo precio y de fácil implementación.
Plantear las características técnicas del sistema, realizando pruebas de caracterización de
sensores, métodos de riego y planos de instalación, para su implementación en campo.
Realizar el sembrado del cultivo a tratar y la instalación del sistema de riego a utilizar, con registros
fotográficos semanales de la evolución del cultivo con el sistema automatizado en comparación
con otro cultivo tratado de forma tradicional.
8
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
3 MARCO TEORICO
3.1 Factores que influyen en el cultivo
Hay una serie de aspectos que influyen considerablemente y varían el coeficiente de un cultivo que son: el
agua, clima, suelo, y las etapas de crecimiento del cultivo. [1].
3.2 Importancia del Agua en el cultivo
El suelo es un entramado de partículas minerales que no forman una masa compacta, sino que entre ellas
existe una intrincada red de poros y canales por los que circula el aire y el agua.
La capacidad de retener agua en el suelo dependerá de su textura (proporción de arena, limo y arcilla) y
de su estructura (forma en la que las partículas del suelo se unen formando agregados y creando
diferentes tipos de poros). Para la actividad agrícola el suelo ideal es el franco (30-50% de arena; 30-50%
de limo y 20-30% de arcilla). Este suelo es capaz de almacenar unos 300 litros de agua por metro de
profundidad, aunque no todo está agua está enteramente disponible para las plantas.
En general el 80% de una planta está constituida por agua, y un 20% está constituido por componentes de
materia seca entre los que se encuentra carbono, oxígeno, nitrógeno, fósforo, potasio, calcio etc. Cada tipo
de planta presenta un período crítico en relación a la escasez de agua, en el caso de la fresa este
momento crítico es durante la formación del fruto. En términos generales el cultivo de fresa tiene una
demanda de agua de 12546 metros cúbicos por cada hectárea [1].
9
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
3.2.1 Potencial del agua en el suelo
Cada gota de agua situada en un poro cualquiera del suelo está sometida a distintas fuerzas que
determinarán su evolución. Sobre una gota de agua actuarían las siguientes fuerzas:
La fuerza de gravedad
La fuerza debido a la presencia de sales
La fuerza debida a la interacción entre las cargas eléctricas de las arcillas y sustancias húmicas
con la polaridad de las moléculas de agua.
A efectos prácticos la conclusión sería que para poder extraer agua del suelo es necesario contrarrestar
todas estas fuerzas, debiéndose realizar una presión de succión, cuyo valor habría de igualar el balance de
todos las fuerzas enumeradas anteriormente, por simplicidad se denomina potencial hídrico del suelo o
tensión de humedad.
El potencial hídrico, y por tanto el esfuerzo que deben realizar las plantas para extraer agua del suelo, no
es lineal, sino que aumenta a medida que el contenido de agua de los poros va disminuyendo. Esto
significa que para minimizar el gasto energético de las plantas en la absorción de agua, maximizando por
tanto la producción, lo ideal sería planear el riego para que el contenido de agua del suelo se mantuviera
siempre en valores altos, pero sin saturarlo durante periodos prolongados.
3.2.2 Concepto de Evapotranspiración
Para lograr buen uso del agua de riego, el dato básico que debe conocerse es el consumo de agua del
cultivo en cuestión para un periodo de tiempo determinado. Intentando cuantificar este consumo se define
el término evapotranspiración (ET), como la cantidad de agua que el suelo pierde bien como consecuencia
directa de la evaporación o bien debido a la transpiración de las plantas. Se emplea también el término
evapotranspiración potencial (ETP), que sería la evapotranspiración del cultivo siempre que el agua
10
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
disponible en el suelo no actuase como factor limitante, y vendría a representar el valor máximo de
evapotranspiración bajo unas condiciones ambientales concretas [2].
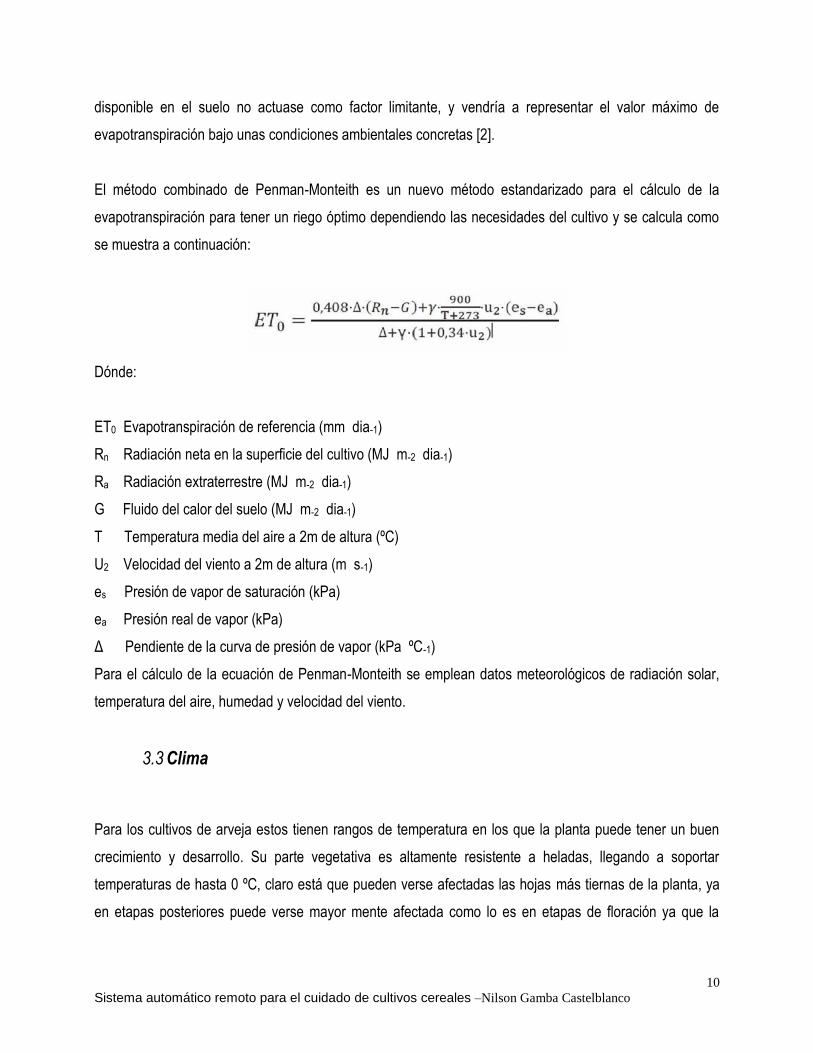
El método combinado de Penman-Monteith es un nuevo método estandarizado para el cálculo de la
evapotranspiración para tener un riego óptimo dependiendo las necesidades del cultivo y se calcula como
se muestra a continuación:
Dónde:
ET0 Evapotranspiración de referencia (mm dia-1)
Rn Radiación neta en la superficie del cultivo (MJ m-2 dia-1)
Ra Radiación extraterrestre (MJ m-2 dia-1)
G Fluido del calor del suelo (MJ m-2 dia-1)
T Temperatura media del aire a 2m de altura (ºC)
U2 Velocidad del viento a 2m de altura (m s-1)
es Presión de vapor de saturación (kPa)
ea Presión real de vapor (kPa)
Δ Pendiente de la curva de presión de vapor (kPa ºC-1)
Para el cálculo de la ecuación de Penman-Monteith se emplean datos meteorológicos de radiación solar,
temperatura del aire, humedad y velocidad del viento.
3.3 Clima
Para los cultivos de arveja estos tienen rangos de temperatura en los que la planta puede tener un buen
crecimiento y desarrollo. Su parte vegetativa es altamente resistente a heladas, llegando a soportar
temperaturas de hasta 0 ºC, claro está que pueden verse afectadas las hojas más tiernas de la planta, ya
en etapas posteriores puede verse mayor mente afectada como lo es en etapas de floración ya que la
11
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
planta comienza a acumular los granos y es vulnerable a altas temperaturas mayores a 30º y a heladas
[3].
Los rangos más recomendados de temperatura para este tipo de cultivo varían entre los 15º y 22º grados
centígrados [4].
Para el cultivo de frijol lo primero que se estableció es la variedad a cultivar ya que en Colombia existe una
gran diversidad en cuanto a sus características [5] [6], las variedades consideradas a cultivar son el frijol
cerinza o cargamanto, ya que son variedades muy cultivadas y conocidas en el lugar donde se va a hacer
el cultivo.
Los cultivos de frijol no son muy resistentes a niveles de humedad muy altos, por esto mismo se
recomienda su sembrado en tierras inclinadas para que no se apoce el agua, generando daños en la planta
[7].
Los rangos más recomendados de temperatura para este tipo de cultivo varían entre los 15º y 22º grados
centígrados [6].
3.4 Suelo
Prefiere suelos equilibrados, ricos en materia orgánica, aireados, bien drenados, pero con cierta capacidad
de retención de agua.
El equilibrio químico de los elementos nutritivos se considera más favorable que una riqueza elevada de los
mismos. Niveles bajos de patógenos son igualmente indispensables para el cultivo.
Las propiedades físicas, de los suelos para estos tipos de cultivos leguminosas; son suelos de texturas
francas:
franco arcillosos
franco limosos
franco arenoso.
12
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Se encuentran varios tipos de estructura, predominando la estructura granular. Debido a estas
características, los suelos poseen muy buen drenaje interno y externo y una baja capacidad de retención
de humedad.
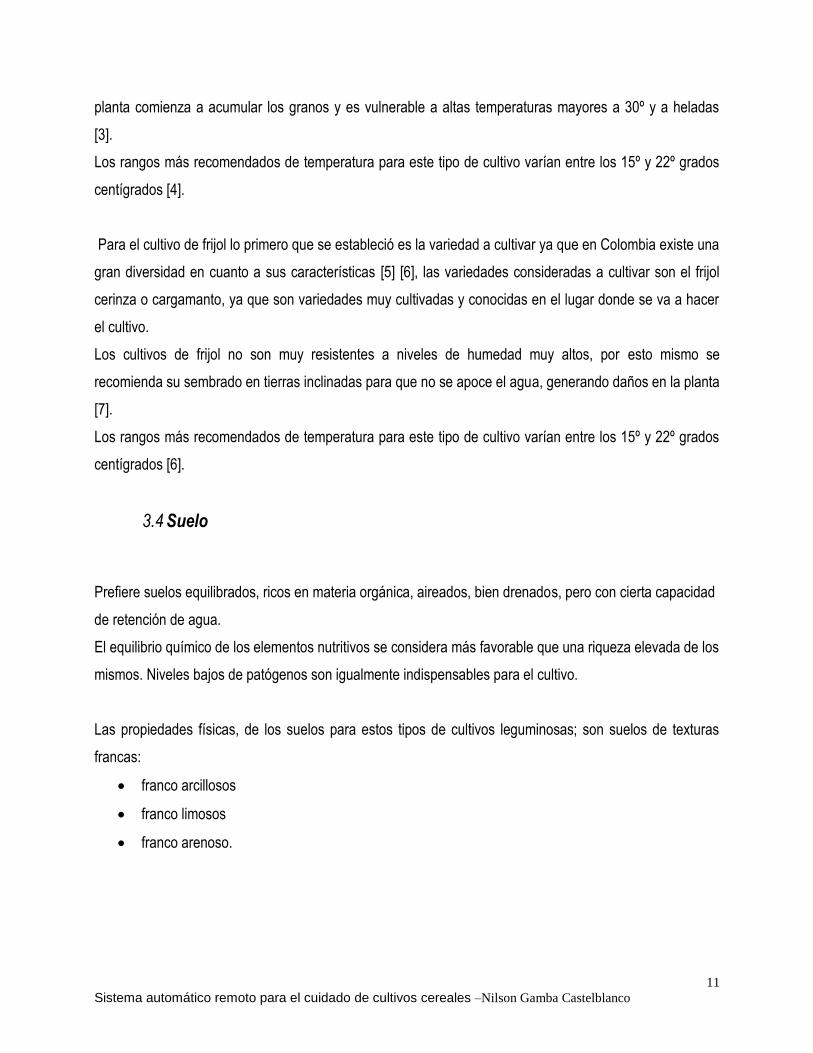
El cultivo de frijol requiere de cantidades altas de N, K y Ca y en una menor proporción S, Mg y P, por esto
mismo se requiere estar atento al crecimiento de las plantas en los cultivos para que en etapas de
aplicación de fertilizantes, se puedan suplir estas necesidades.
Componentes de la cosecha N P K Ca Mg S
Vainas 32 4 22 4 4 10
Tallos 65 5 71 50 14 15
Total 97 9 93 54 18 25
Tabla 1 Fuente: tomado de Flor, 1985. Exigencias minerales del fríjol [5].
3.4.1 los nutrientes
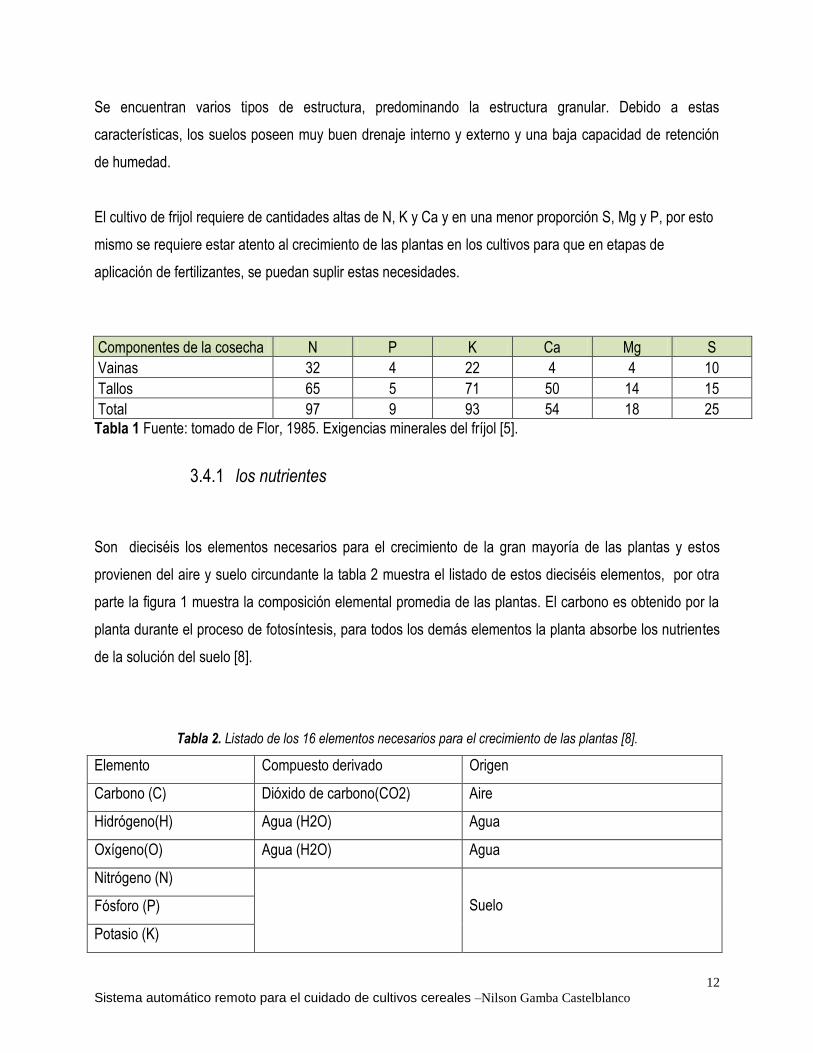
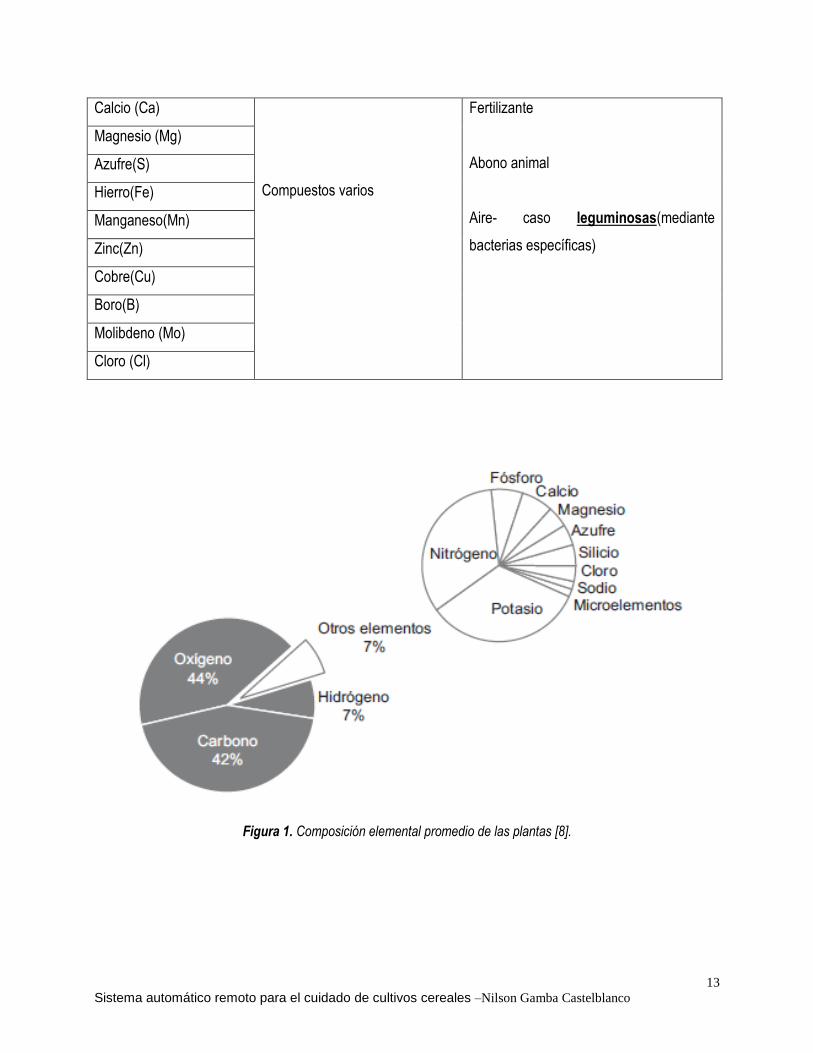
Son dieciséis los elementos necesarios para el crecimiento de la gran mayoría de las plantas y estos
provienen del aire y suelo circundante la tabla 2 muestra el listado de estos dieciséis elementos, por otra
parte la figura 1 muestra la composición elemental promedia de las plantas. El carbono es obtenido por la
planta durante el proceso de fotosíntesis, para todos los demás elementos la planta absorbe los nutrientes
de la solución del suelo [8].
Tabla 2. Listado de los 16 elementos necesarios para el crecimiento de las plantas [8].
Elemento Compuesto derivado Origen
Carbono (C) Dióxido de carbono(CO2) Aire
Hidrógeno(H) Agua (H2O) Agua
Oxígeno(O) Agua (H2O) Agua
Nitrógeno (N)
Suelo
Fósforo (P)
Potasio (K)
13
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Calcio (Ca)
Compuestos varios
Fertilizante
Abono animal
Aire- caso leguminosas(mediante
bacterias específicas)
Magnesio (Mg)
Azufre(S)
Hierro(Fe)
Manganeso(Mn)
Zinc(Zn)
Cobre(Cu)
Boro(B)
Molibdeno (Mo)
Cloro (Cl)
Figura 1. Composición elemental promedio de las plantas [8].
14
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
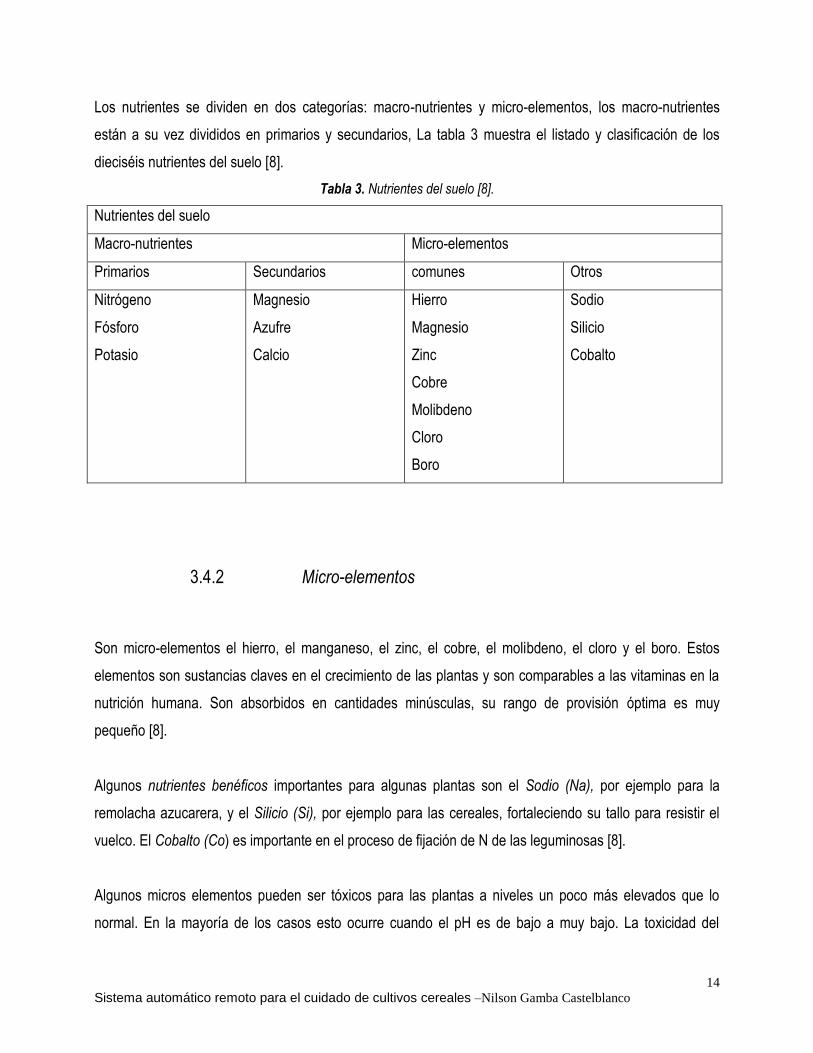
Los nutrientes se dividen en dos categorías: macro-nutrientes y micro-elementos, los macro-nutrientes
están a su vez divididos en primarios y secundarios, La tabla 3 muestra el listado y clasificación de los
dieciséis nutrientes del suelo [8].
Tabla 3. Nutrientes del suelo [8].
Nutrientes del suelo
Macro-nutrientes Micro-elementos
Primarios Secundarios comunes Otros
Nitrógeno
Fósforo
Potasio
Magnesio
Azufre
Calcio
Hierro
Magnesio
Zinc
Cobre
Molibdeno
Cloro
Boro
Sodio
Silicio
Cobalto
3.4.2 Micro-elementos
Son micro-elementos el hierro, el manganeso, el zinc, el cobre, el molibdeno, el cloro y el boro. Estos
elementos son sustancias claves en el crecimiento de las plantas y son comparables a las vitaminas en la
nutrición humana. Son absorbidos en cantidades minúsculas, su rango de provisión óptima es muy
pequeño [8].
Algunos nutrientes benéficos importantes para algunas plantas son el Sodio (Na), por ejemplo para la
remolacha azucarera, y el Silicio (Si), por ejemplo para las cereales, fortaleciendo su tallo para resistir el
vuelco. El Cobalto (Co) es importante en el proceso de fijación de N de las leguminosas [8].
Algunos micros elementos pueden ser tóxicos para las plantas a niveles un poco más elevados que lo
normal. En la mayoría de los casos esto ocurre cuando el pH es de bajo a muy bajo. La toxicidad del
15
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
aluminio y del manganeso es la más frecuente, en relación directa con suelos ácidos. Finalmente cabe
mencionar que un nutriente no puede ser substituido por otro [8].
3.4.3 Abono orgánico
El Abono orgánico mejora la eficiencia de los fertilizantes, es recomendado utilizar todas las fuentes
disponibles de nutrientes: excrementos de vaca, de cerdos, de pollos, desperdicios vegetales, paja, estiba
de maíz y otros materiales orgánicos. Sin embargo estos deberían ser convertidos en abono y ser
descompuestos antes de su aplicación en el suelo. Con la descomposición del material orgánico fresco, los
nutrientes del suelo, particularmente el nitrógeno, serán fijados provisionalmente; de este modo no son
disponibles para el cultivo posterior. La materia orgánica mejora la estructura del suelo y reduce la erosión
del mismo, tiene un efecto regulador en la estructura del suelo y le ayuda a almacenar más humedad,
mejorando significativamente de esta manera su fertilidad [8].
El abono orgánico a menudo crea base para el uso exitoso de los fertilizantes minerales. La combinación
de abono orgánico, materia orgánica y fertilizantes minerales, ofrece condiciones ideales para el cultivo
debido a que el abono y la materia orgánicos mejoran las propiedades del suelo y el suministro de
fertilizantes minerales provee los nutrientes que las plantas necesitan. No obstante, que el abono y materia
orgánicos a menudo no están disponibles en grandes cantidades y por sí solo no son suficientes para
lograr el nivel de producción que el agricultor desea, por lo tanto los fertilizantes minerales tienen que ser
aplicados adicionalmente [8].
3.4.4 Fertilizantes
Cualquier material natural o industrializado, que contenga al menos cinco por ciento de uno o más de los
tres nutrientes primarios (N, P2O5, K2O), puede ser llamado fertilizante. Los fertilizantes fabricados
industrialmente son llamados fertilizantes minerales [8].
16
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
La presentación de los fertilizantes minerales es muy variada. Dependiendo del proceso de fabricación, las
partículas de los fertilizantes minerales pueden ser de muy diferentes tamaños y formas: gránulos, píldoras,
«perlados», cristales, polvo de grano grueso compactado o fino. La mayoría de los fertilizantes es provista
en forma sólida. Los fertilizantes líquidos y de suspensión son importantes principalmente en América del
Norte [8].
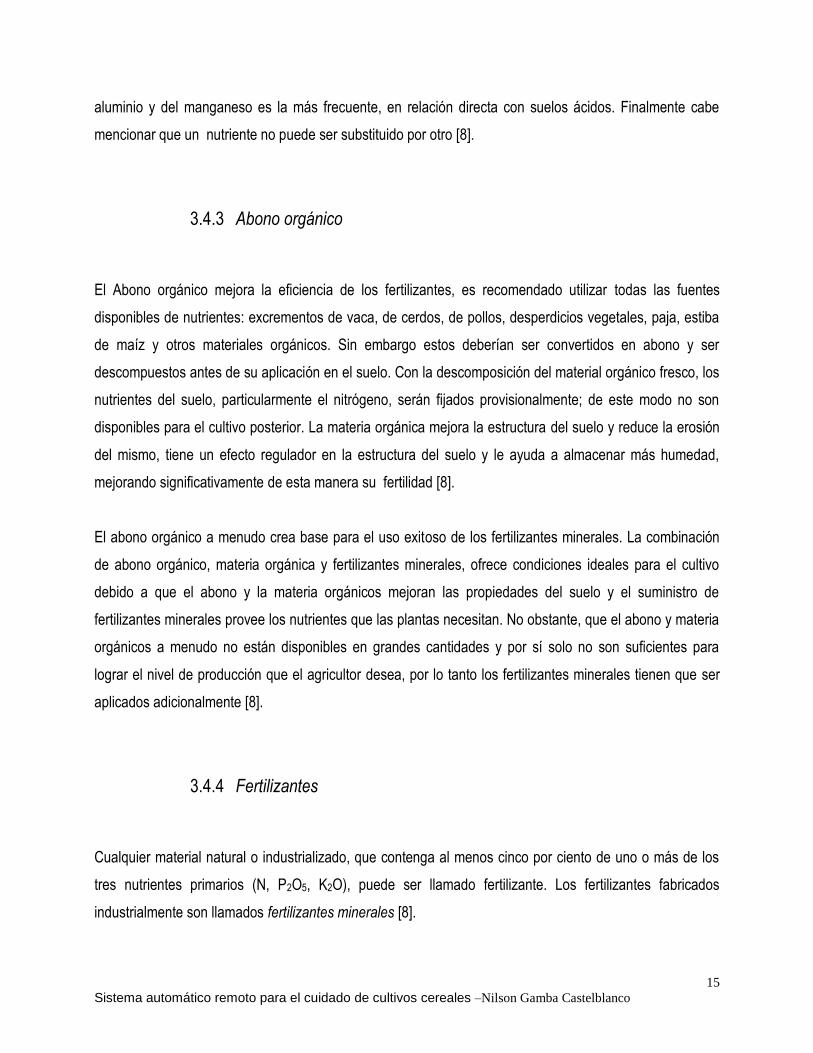
La figura 2 muestra el diagrama de flujo de la producción de fertilizantes, en esta figura se observa que el
amoniaco es sintetizado de los hidrocarburos, del nitrógeno atmosférico y del vapor, el dióxido de carbono
resultante puede mezclarse con el amoniaco para formar la urea. El ácido nítrico es hecho por oxidación
del amoniaco con el aire, por otra parte el ácido sulfúrico es producido por la quema del azufre en el aire.
La reacción la roca produce ácido fosfórico [8].
Figura 2. Diagrama de flujo de la producción de fertilizantes [8].
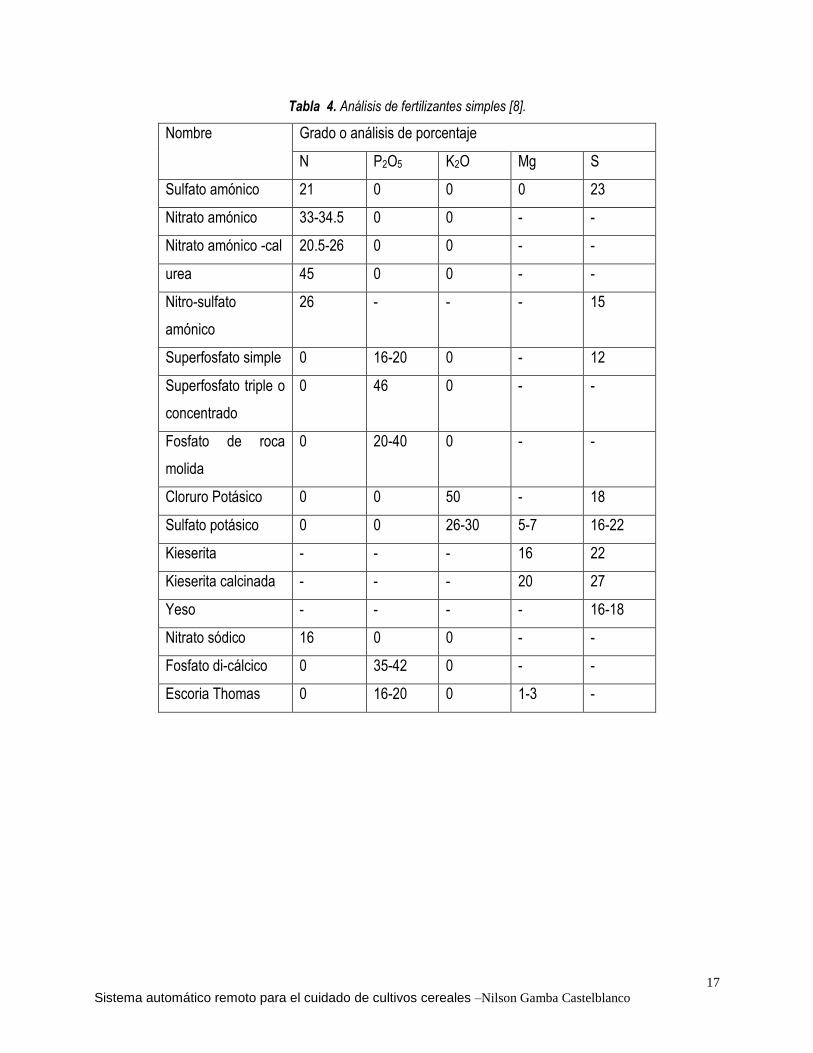
En la Tabla 4 se listan algunos fertilizantes simples con sus respectivos análisis de nutrientes, por otra
parte la Tabla 5 muestra el contenido aproximado de nutrientes en los fertilizantes multi nutrientes [8].
17
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tabla 4. Análisis de fertilizantes simples [8].
Nombre Grado o análisis de porcentaje
N P2O5 K2O Mg S
Sulfato amónico 21 0 0 0 23
Nitrato amónico 33-34.5 0 0 - -
Nitrato amónico -cal 20.5-26 0 0 - -
urea 45 0 0 - -
Nitro-sulfato
amónico
26 - - - 15
Superfosfato simple 0 16-20 0 - 12
Superfosfato triple o
concentrado
0 46 0 - -
Fosfato de roca
molida
0 20-40 0 - -
Cloruro Potásico 0 0 50 - 18
Sulfato potásico 0 0 26-30 5-7 16-22
Kieserita - - - 16 22
Kieserita calcinada - - - 20 27
Yeso - - - - 16-18
Nitrato sódico 16 0 0 - -
Fosfato di-cálcico 0 35-42 0 - -
Escoria Thomas 0 16-20 0 1-3 -

18
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tabla. 5. Análisis de fertilizantes multi nutrientes [8].
Tipo de
fertilizantes
%N % P2O5 % K2O
Fertilizantes NPK 5 - 26 5 - 35 5 – 26
Fosfatos amónicos
DAP
16-18 42-48 -
Fosfatos amónicos
MAP
11 52 -
Nitrofosfatos NP 20-26 6-34 -
Fertilizantes PK - 6 - 30 6 – 30
Los fertilizantes proveen nutrientes que los cultivos necesitan. Los fertilizantes permiten producir más
alimentos y de mejor calidad, los fertilizantes permiten mejorar la baja fertilidad de los suelos que han sido
sobre explotados, Se estima que, a escala mundial, aproximadamente el 40 por ciento (dentro de un
intervalo del 37 por ciento al 43 por ciento) del suministro proteínico de la dieta a mediados de la década de
los noventa tuvo su origen en el nitrógeno sintético producido por el proceso Haber - Bosch para la síntesis
del amoniaco. Las plantas toman nutrientes del suelo, si el suministro de nutrientes del suelo es amplio,
los cultivos probablemente crecerán mejor y producirán mayores rendimientos. Sin embargo si uno de los
nutrientes es escaso, el crecimiento de la planta será limitado y los rendimientos de los cultivos serán
reducidos. Con fertilizantes los rendimientos de los cultivos pueden a menudo duplicarse o más aún
triplicarse. Los fertilizantes además aseguran un uso más eficiente de la tierra y especialmente del agua.
Estas son consideraciones muy importantes cuando las lluvias son escasas o los cultivos tienen que ser
irrigados, en cuyo caso el rendimiento por unidad de agua usada puede ser más que duplicado. La
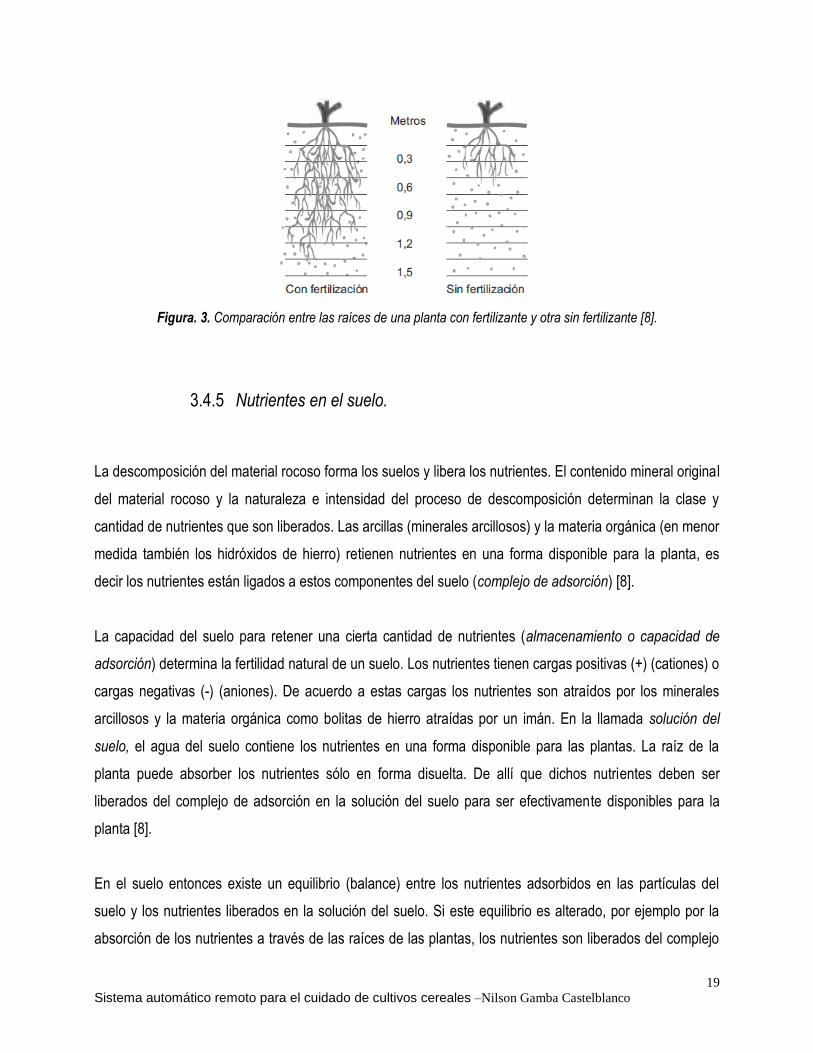
profundidad de las raíces del cultivo también puede ser aumentada, como se puede observar en la figura 3
[8].
19
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura. 3. Comparación entre las raíces de una planta con fertilizante y otra sin fertilizante [8].
3.4.5 Nutrientes en el suelo.
La descomposición del material rocoso forma los suelos y libera los nutrientes. El contenido mineral original
del material rocoso y la naturaleza e intensidad del proceso de descomposición determinan la clase y
cantidad de nutrientes que son liberados. Las arcillas (minerales arcillosos) y la materia orgánica (en menor
medida también los hidróxidos de hierro) retienen nutrientes en una forma disponible para la planta, es
decir los nutrientes están ligados a estos componentes del suelo (complejo de adsorción) [8].
La capacidad del suelo para retener una cierta cantidad de nutrientes (almacenamiento o capacidad de
adsorción) determina la fertilidad natural de un suelo. Los nutrientes tienen cargas positivas (+) (cationes) o
cargas negativas (-) (aniones). De acuerdo a estas cargas los nutrientes son atraídos por los minerales
arcillosos y la materia orgánica como bolitas de hierro atraídas por un imán. En la llamada solución del
suelo, el agua del suelo contiene los nutrientes en una forma disponible para las plantas. La raíz de la
planta puede absorber los nutrientes sólo en forma disuelta. De allí que dichos nutrientes deben ser
liberados del complejo de adsorción en la solución del suelo para ser efectivamente disponibles para la
planta [8].
En el suelo entonces existe un equilibrio (balance) entre los nutrientes adsorbidos en las partículas del
suelo y los nutrientes liberados en la solución del suelo. Si este equilibrio es alterado, por ejemplo por la
absorción de los nutrientes a través de las raíces de las plantas, los nutrientes son liberados del complejo
20
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
de adsorción para establecer un nuevo equilibrio. En este proceso, los cationes son reemplazados por
Ca2+, Mg2+ procedentes del material sólido (nutrientes no disueltos) o por iones H+, mientras los aniones
son reemplazados por OH- (H+ + OH- = agua). Los nutrientes liberados se mueven de la solución más
concentrada en la proximidad del complejo de adsorción a la solución de más baja concentración en la
vecindad de las raíces. Este proceso de transporte de nutrientes desde el complejo de adsorción a las
raíces es llamado difusión [8].
En suelos dejados sin cultivar por algún tiempo (barbecho), los nutrientes liberados en la solución del suelo
se acumulan. Esto ocurre en particular con el nitrógeno derivado de la descomposición de la materia
orgánica. Este puede tener un efecto ambiental negativo, dado que en suelos con textura ligera, y bajo
condiciones de humedad, la mayor parte del nitrógeno acumulado sería lixiviado (arrastrado) al agua de
superficie (o se perdería debido a la des nitrificación del suelo); el potasio acumulado puede también
perderse por lixiviación [8].
En condiciones semiáridas, los nutrientes (por ejemplo: cloruros y sulfatos de sodio, calcio y magnesio)
pueden moverse, con la evaporación del agua, a la superficie y causar daños por exceso de salinidad a los
cultivos desarrollados después del período de barbecho. Sin embargo, los suelos viejos sometidos a la
acción del clima, que han perdido la mayoría de los cationes, tienen un gran excedente de cargas
negativas. Tales suelos retendrán los cationes de nutrientes aplicados [8].
La fuerza de atracción por el complejo de adsorción difiere con nutrientes diferentes (cationes y aniones).
Con cationes es influenciada esencialmente por la hidratación y por la carga que ellos llevan. El aluminio
(Al3+) es más fuertemente mantenido por el complejo de adsorción, seguida por los micro-elementos
metálicos (tales como hierro, manganeso, zinc) y potasio (K+), amonio (NH4+), calcio (Ca2+) y magnesio
(Mg2+). Con los aniones, el fosfato (PO4 3-), el cual es elevadamente inmóvil, es fuertemente mantenido
por las posiciones cargadas positivamente de ciertos minerales arcillosos y componentes del suelo como
calcio, hierro y aluminio. Por el contrario, el cloro (Cl-) y el nitrato (NO3-) tienden a permanecer en la
solución del suelo, permaneciendo móviles y moviéndose con el agua del suelo a las raíces (flujo de masa)
cuando las plantas absorben agua, o son lixiviados. El sulfato (SO42-), como el nitrato permanece
relativamente móvil y es también sujeto a lixiviación [8].
21
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Cuando el abono orgánico, el compost y los fertilizantes son aplicados en un suelo cuyo contenido natural
propio no puede suplir los nutrientes necesarios para el óptimo crecimiento de la planta, los fertilizantes
agregados se descomponen y disuelven, y sus cationes y aniones se comportan como se ha descrito
anteriormente. El proceso de la adsorción de los nutrientes y la liberación en la solución del suelo es muy
importante. En particular la diferencia en la fuerza de adsorción de los cationes y aniones tiene una
influencia importante en cómo y cuándo aplicar fertilizantes (en particular fertilizantes nitrogenados) a fin de
recibir la mayor eficiencia y evitar la contaminación por lixiviación [8].
La materia orgánica es capaz de adsorber más nutrientes que la cantidad comparable de arcilla. En
consecuencia, es importante aumentar la materia orgánica especialmente en suelos tropicales degradados
con menor poder de adsorción del componente mineral (por ejemplo suelos caoliníticos) [8].
3.4.6 Organismos del suelo
Las actividades de los organismos del suelo son indispensables para una buena fertilidad del suelo y una
buena producción del cultivo. La mayoría de sus actividades son beneficiosas para el agricultor, debido a
que estos organismos se descomponen para dar humus, reúnen partículas del suelo para dar una mayor
estructura, protegen las raíces de enfermedades y parásitos, retienen el nitrógeno y otros nutrientes,
producen hormonas que ayudan a las plantas a crecer y pueden convertir los contaminantes que se hallan
en el suelo [8].
Después de ser mezcladas en el suelo e ingeridas por las lombrices, las formas insolubles del
nitrógeno(N), fósforo (P) y azufre (S) contenidas en las partículas de la materia orgánica son convertidas en
formas disponibles para las plantas por medio de la actividad bacteriana. La actividad bacteriana puede
jugar un papel especial en el ciclo del nitrógeno [8].
22
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
3.5 Tipos de Riego
El siguiente es un análisis de los sistemas de riego que existen en agricultura, se analizan las ventajas y
desventajas de cada uno a fin de seleccionar uno de ellos.
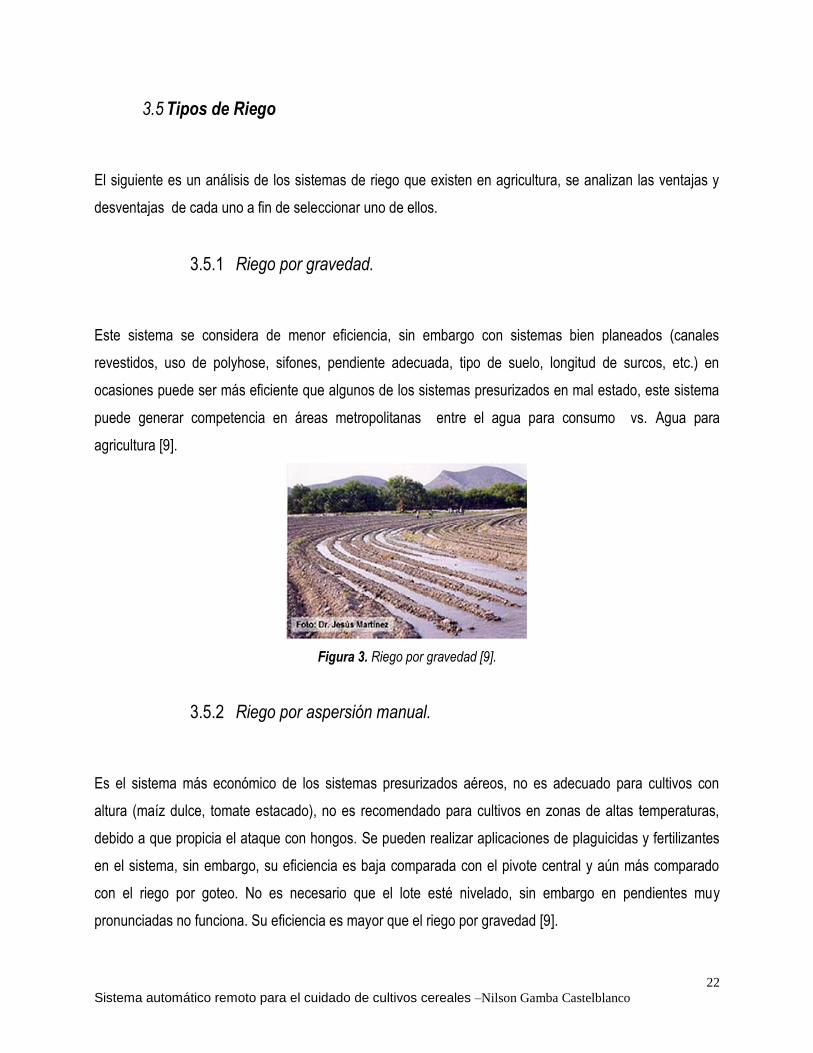
3.5.1 Riego por gravedad.
Este sistema se considera de menor eficiencia, sin embargo con sistemas bien planeados (canales
revestidos, uso de polyhose, sifones, pendiente adecuada, tipo de suelo, longitud de surcos, etc.) en
ocasiones puede ser más eficiente que algunos de los sistemas presurizados en mal estado, este sistema
puede generar competencia en áreas metropolitanas entre el agua para consumo vs. Agua para
agricultura [9].
Figura 3. Riego por gravedad [9].
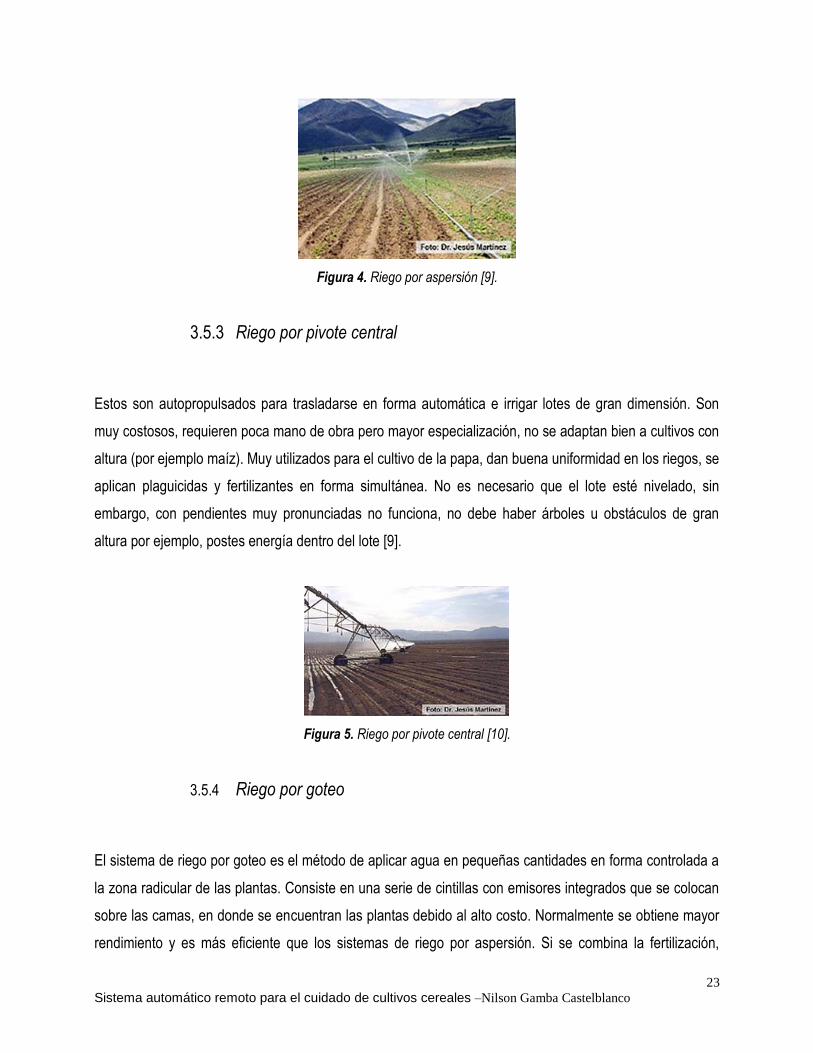
3.5.2 Riego por aspersión manual.
Es el sistema más económico de los sistemas presurizados aéreos, no es adecuado para cultivos con
altura (maíz dulce, tomate estacado), no es recomendado para cultivos en zonas de altas temperaturas,
debido a que propicia el ataque con hongos. Se pueden realizar aplicaciones de plaguicidas y fertilizantes
en el sistema, sin embargo, su eficiencia es baja comparada con el pivote central y aún más comparado
con el riego por goteo. No es necesario que el lote esté nivelado, sin embargo en pendientes muy
pronunciadas no funciona. Su eficiencia es mayor que el riego por gravedad [9].
23
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 4. Riego por aspersión [9].
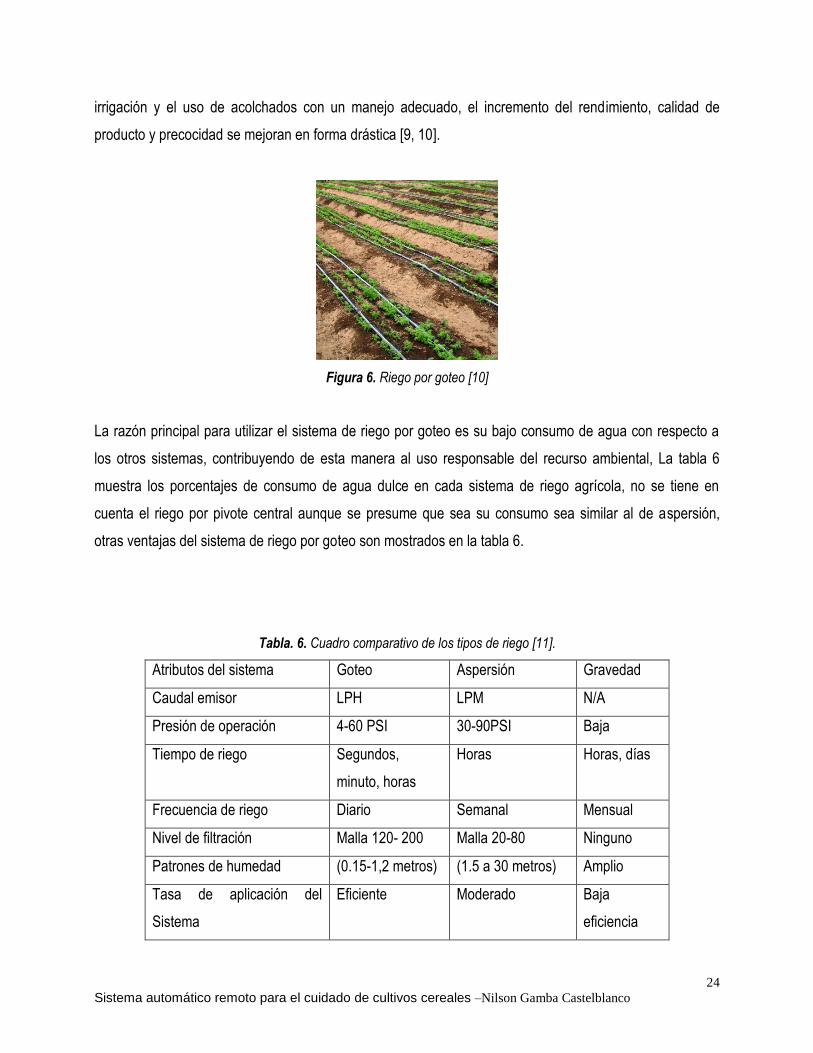
3.5.3 Riego por pivote central
Estos son autopropulsados para trasladarse en forma automática e irrigar lotes de gran dimensión. Son
muy costosos, requieren poca mano de obra pero mayor especialización, no se adaptan bien a cultivos con
altura (por ejemplo maíz). Muy utilizados para el cultivo de la papa, dan buena uniformidad en los riegos, se
aplican plaguicidas y fertilizantes en forma simultánea. No es necesario que el lote esté nivelado, sin
embargo, con pendientes muy pronunciadas no funciona, no debe haber árboles u obstáculos de gran
altura por ejemplo, postes energía dentro del lote [9].
Figura 5. Riego por pivote central [10].
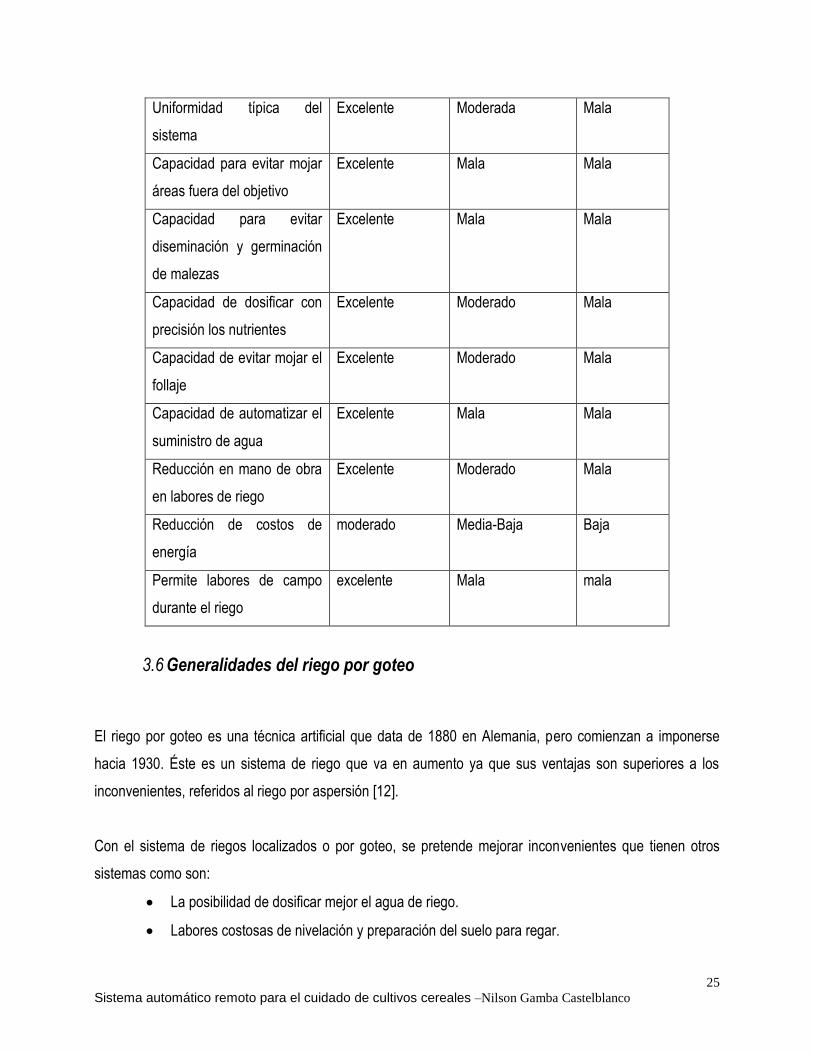
3.5.4 Riego por goteo
El sistema de riego por goteo es el método de aplicar agua en pequeñas cantidades en forma controlada a
la zona radicular de las plantas. Consiste en una serie de cintillas con emisores integrados que se colocan
sobre las camas, en donde se encuentran las plantas debido al alto costo. Normalmente se obtiene mayor
rendimiento y es más eficiente que los sistemas de riego por aspersión. Si se combina la fertilización,
24
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
irrigación y el uso de acolchados con un manejo adecuado, el incremento del rendimiento, calidad de
producto y precocidad se mejoran en forma drástica [9, 10].
Figura 6. Riego por goteo [10]
La razón principal para utilizar el sistema de riego por goteo es su bajo consumo de agua con respecto a
los otros sistemas, contribuyendo de esta manera al uso responsable del recurso ambiental, La tabla 6
muestra los porcentajes de consumo de agua dulce en cada sistema de riego agrícola, no se tiene en
cuenta el riego por pivote central aunque se presume que sea su consumo sea similar al de aspersión,
otras ventajas del sistema de riego por goteo son mostrados en la tabla 6.
Tabla. 6. Cuadro comparativo de los tipos de riego [11].
Atributos del sistema Goteo Aspersión Gravedad
Caudal emisor LPH LPM N/A
Presión de operación 4-60 PSI 30-90PSI Baja
Tiempo de riego Segundos,
minuto, horas
Horas Horas, días
Frecuencia de riego Diario Semanal Mensual
Nivel de filtración Malla 120- 200 Malla 20-80 Ninguno
Patrones de humedad (0.15-1,2 metros) (1.5 a 30 metros) Amplio
Tasa de aplicación del
Sistema
Eficiente Moderado Baja
eficiencia
25
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Uniformidad típica del
sistema
Excelente Moderada Mala
Capacidad para evitar mojar
áreas fuera del objetivo
Excelente Mala Mala
Capacidad para evitar
diseminación y germinación
de malezas
Excelente Mala Mala
Capacidad de dosificar con
precisión los nutrientes
Excelente Moderado Mala
Capacidad de evitar mojar el
follaje
Excelente Moderado Mala
Capacidad de automatizar el
suministro de agua
Excelente Mala Mala
Reducción en mano de obra
en labores de riego
Excelente Moderado Mala
Reducción de costos de
energía
moderado Media-Baja Baja
Permite labores de campo
durante el riego
excelente Mala mala
3.6 Generalidades del riego por goteo
El riego por goteo es una técnica artificial que data de 1880 en Alemania, pero comienzan a imponerse
hacia 1930. Éste es un sistema de riego que va en aumento ya que sus ventajas son superiores a los
inconvenientes, referidos al riego por aspersión [12].
Con el sistema de riegos localizados o por goteo, se pretende mejorar inconvenientes que tienen otros
sistemas como son:
La posibilidad de dosificar mejor el agua de riego.
Labores costosas de nivelación y preparación del suelo para regar.
26
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
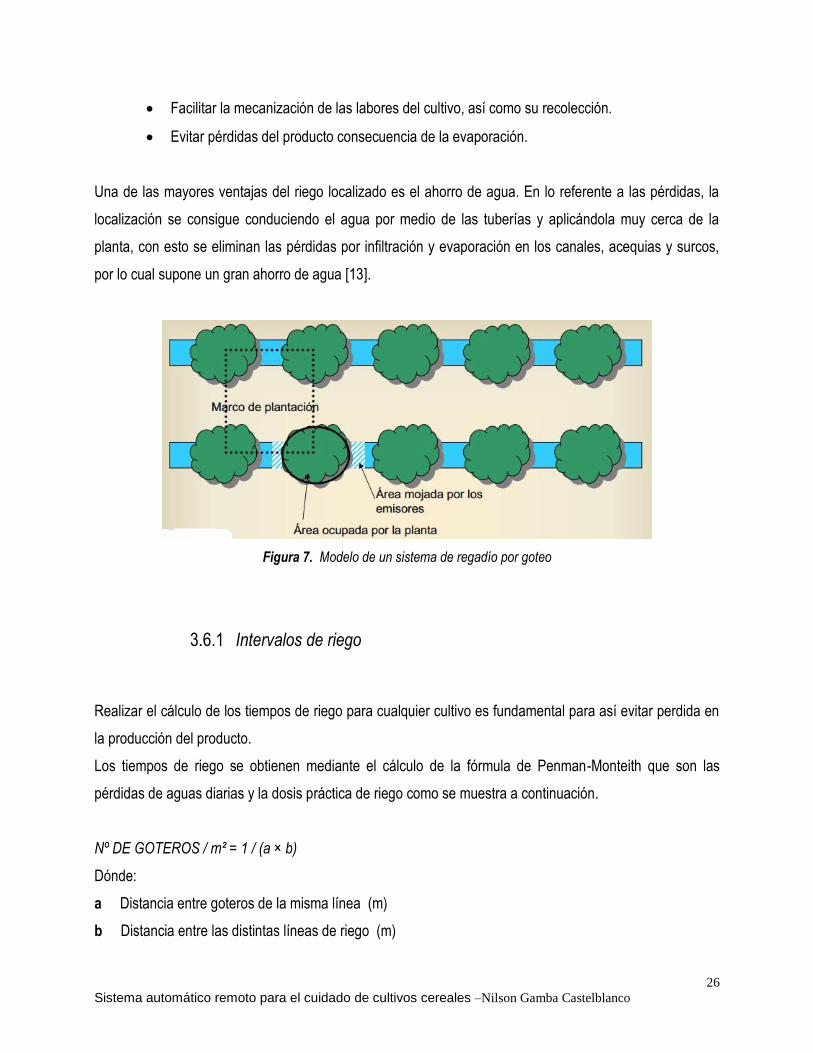
Facilitar la mecanización de las labores del cultivo, así como su recolección.
Evitar pérdidas del producto consecuencia de la evaporación.
Una de las mayores ventajas del riego localizado es el ahorro de agua. En lo referente a las pérdidas, la
localización se consigue conduciendo el agua por medio de las tuberías y aplicándola muy cerca de la
planta, con esto se eliminan las pérdidas por infiltración y evaporación en los canales, acequias y surcos,
por lo cual supone un gran ahorro de agua [13].
Figura 7. Modelo de un sistema de regadío por goteo
3.6.1 Intervalos de riego
Realizar el cálculo de los tiempos de riego para cualquier cultivo es fundamental para así evitar perdida en
la producción del producto.
Los tiempos de riego se obtienen mediante el cálculo de la fórmula de Penman-Monteith que son las
pérdidas de aguas diarias y la dosis práctica de riego como se muestra a continuación.
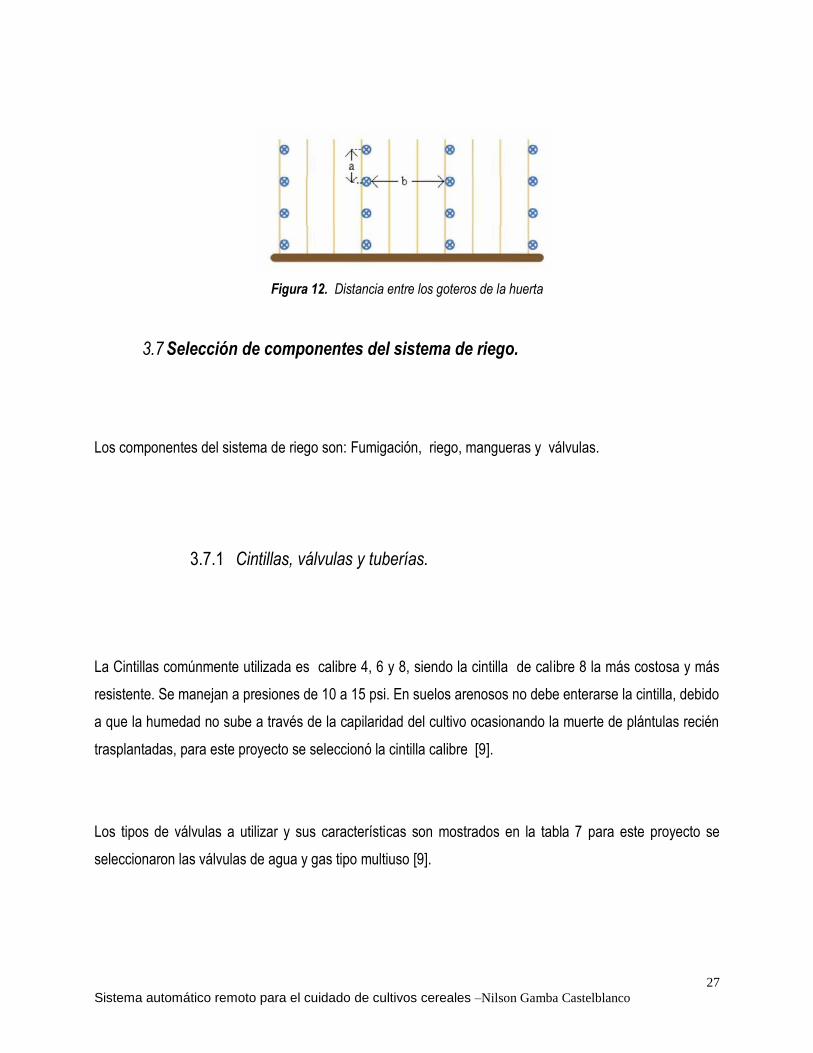
Nº DE GOTEROS / m² = 1 / (a × b)
Dónde:
a Distancia entre goteros de la misma línea (m)
b Distancia entre las distintas líneas de riego (m)
27
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 12. Distancia entre los goteros de la huerta
3.7 Selección de componentes del sistema de riego.
Los componentes del sistema de riego son: Fumigación, riego, mangueras y válvulas.
3.7.1 Cintillas, válvulas y tuberías.
La Cintillas comúnmente utilizada es calibre 4, 6 y 8, siendo la cintilla de calibre 8 la más costosa y más
resistente. Se manejan a presiones de 10 a 15 psi. En suelos arenosos no debe enterarse la cintilla, debido
a que la humedad no sube a través de la capilaridad del cultivo ocasionando la muerte de plántulas recién
trasplantadas, para este proyecto se seleccionó la cintilla calibre [9].
Los tipos de válvulas a utilizar y sus características son mostrados en la tabla 7 para este proyecto se
seleccionaron las válvulas de agua y gas tipo multiuso [9].
28
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tabla. 7. Tipos de válvulas [9]
Tipo válvula Características
Válvula Check Sistema de protección obligatorio, objetivo es evitar
la contaminación de mantos acuíferos, debe
inmediatamente después de la bomba
Válvula de aire Necesario para un flujo de agua en la tubería sea
normal, evita que las tuberías se rompan. Deben ir
en las partes más altas del área de cultivo.
Regulador Reguladores de presión y expulsión de emergencia
Válvulas de agua Controlan el flujo de agua
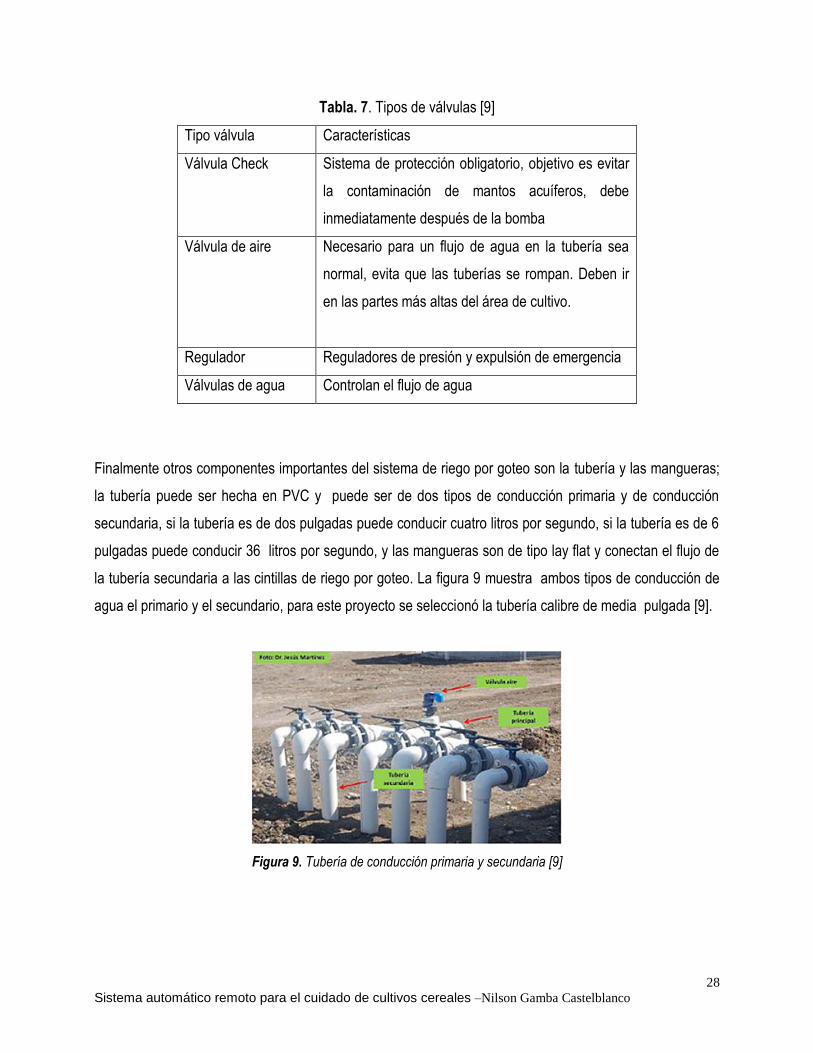
Finalmente otros componentes importantes del sistema de riego por goteo son la tubería y las mangueras;
la tubería puede ser hecha en PVC y puede ser de dos tipos de conducción primaria y de conducción
secundaria, si la tubería es de dos pulgadas puede conducir cuatro litros por segundo, si la tubería es de 6
pulgadas puede conducir 36 litros por segundo, y las mangueras son de tipo lay flat y conectan el flujo de
la tubería secundaria a las cintillas de riego por goteo. La figura 9 muestra ambos tipos de conducción de
agua el primario y el secundario, para este proyecto se seleccionó la tubería calibre de media pulgada [9].
Figura 9. Tubería de conducción primaria y secundaria [9]
29
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
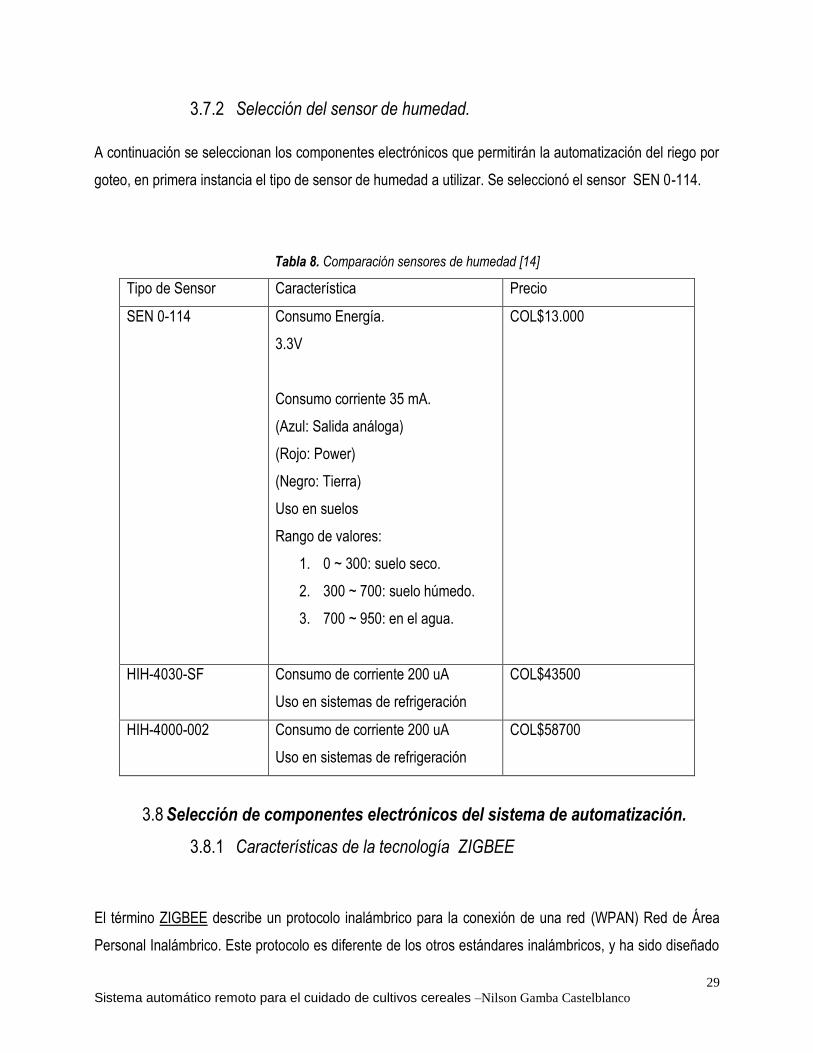
3.7.2 Selección del sensor de humedad.
A continuación se seleccionan los componentes electrónicos que permitirán la automatización del riego por
goteo, en primera instancia el tipo de sensor de humedad a utilizar. Se seleccionó el sensor SEN 0-114.
Tabla 8. Comparación sensores de humedad [14]
Tipo de Sensor Característica Precio
SEN 0-114 Consumo Energía.
3.3V
Consumo corriente 35 mA.
(Azul: Salida análoga)
(Rojo: Power)
(Negro: Tierra)
Uso en suelos
Rango de valores:
1. 0 ~ 300: suelo seco.
2. 300 ~ 700: suelo húmedo.
3. 700 ~ 950: en el agua.
COL$13.000
HIH-4030-SF Consumo de corriente 200 uA
Uso en sistemas de refrigeración
COL$43500
HIH-4000-002 Consumo de corriente 200 uA
Uso en sistemas de refrigeración
COL$58700
3.8 Selección de componentes electrónicos del sistema de automatización.
3.8.1 Características de la tecnología ZIGBEE
El término ZIGBEE describe un protocolo inalámbrico para la conexión de una red (WPAN) Red de Área
Personal Inalámbrico. Este protocolo es diferente de los otros estándares inalámbricos, y ha sido diseñado
30
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
para soportar un diverso mercado de aplicaciones con una conectividad más sofisticada que los anteriores
sistemas inalámbricos.
La razón de promover un nuevo estándar, es para permitir la interoperabilidad entre dispositivos fabricados
por compañías diferentes, en donde el estándar IEEE 802.15.4 solo contempla las capas PHY (Physical
Layer) y MAC (Medium Access Control); las capas NWK (Network Layer) y APS (Application Layer) han
sido establecidas por la alianza ZIGBEE.
Las características atribuidas a este novedoso protocolo inalámbrico para transporte de datos por
radiofrecuencia son:
Doble capa física (2.4GHz y 868/915MHz)
Velocidad de datos 250kbps (2.4GHz), 40kbps (915MHz), y 20kbps (868MHz)
Optimización de la energía debido a su bajo ciclo de trabajo (1%)
Baja tasa en la transmisión de datos para dispositivos como sensores debido a su bajo ciclo de
trabajo.
El método de acceso al canal CSMA-CA
Rango: 10 a 75 m1
GTS (Guaranteed Time Slots) opcional para aplicaciones que requieren baja latencia.
Direccionamiento:
- 18,450,000,000,000,000,000 dispositivos (64 bit para direcciones IEEE)
- 65,535 dispositivos
Multiples topologías: Star, cluster, tree, mesh
Bajo requerimiento de energía.
Cada una de las aplicaciones de Zigbee tiene diferentes necesidades de ancho de banda, costos y
procedimientos de instalación. Las mayores preocupaciones son satisfacer la necesidad de compartir
conexiones de alta velocidad.
La arquitectura Zigbee debe permitir el diseño fácil y el desarrollo de los dispositivos baratos y de baja
potencia. La interoperabilidad debe ser considerada como una de las razones principales para la
estandarización por lo que la arquitectura debe definir el stack de tal manera que la terminología esté
normalizada. La arquitectura también debe permitir versiones actualizadas y extensiones en el futuro.
31
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Zigbee se ha implementado en la banda mundial de 2.4GHz, sin la necesidad de licencias, o en una de las
bandas regionales de 868/915 MHz. El espectro de radio sin licencia, esta designado por un acuerdo
internacional y pone la carga de adhesión de la especificación sobre el fabricante del equipo.
Las frecuencias 868/915 MHz y 2.4GHz tienen buena penetración tanto a través de paredes como de
techos, aunque tienen un rango limitado. La limitación de rango es realmente deseable para reducir las
interferencias.
El estándar Zigbee debe permitir una transferencia de datos de 250Kbps y de 20Kbps. Esto representa la
cantidad de datos que puede ser transferida cuando la cabecera de la trama de datos se ha retirado. El
hardware Zigbee debe poder comunicarse sobre un rango de 10 a 75 metros. Un hardware típico a 2.4GHz
presenta una distancia de trabajo hasta 30 metros dentro de un edificio y más de 100 metros en un campo
abierto [15].
3.8.2 Modos de operación del Zigbee
Modo Beacon-habilitado
Cuando el coordinador PAN selecciona el modo de beacon-habilitado, usa la estructura de superframe
para manejar la comunicación entre los dispositivos. El formato de la superframe está definido por el
coordinador PAN, y dicho formato se lo envía periódicamente dentro de una trama beacon al resto de
dispositivos.
Modo Beacon- no habilitado
Cuando el coordinador PAN selecciona el modo de beacon-no habilitado los dispositivos pueden enviar sus
datos mediante el mecanismo CSMA/CA no ranurado. En este tipo de modo no se utilizan superframes.
3.8.3 Transmisión y recepción de datos
La transmisión de datos depende del modo de operación de la PAN. En una PAN con beacon-habilitado un
dispositivo que desee transmitir información debe localizar tramas beacon de su coordinador y enviar la
información de acuerdo con la estructura de la superframe usando CSMA/CA ranurado.
32
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
En una PAN con beacon-no habilitado los dispositivos usan CSMA/CA no ranurado y la recepción de datos
del dispositivo puede recibir transmisiones de otros pero solo aceptara las tramas que estén dirigidas hacia
él.
3.8.4 Motores pasó a paso
Es en esencia un conversor electromecánico, que transforma energía eléctrica en mecánica como todo
motor. Mientras que un motor convencional gira libremente al aplicarle una tensión, el motor paso a paso
gira un determinado ángulo de forma incremental (transforma impulsos eléctricos en movimientos de giro
controlados), lo que le permite realizar desplazamientos angulares fijos muy precisos (pueden variar desde
1,80º hasta unos 90º). Son motores ideales cuando queremos un buen posicionamiento con un elevado
grado de exactitud y/o una muy buena regulación de la velocidad, lo que permite que se pueda lograr
obtener exactitud a la hora de mover el riego de fertilizante en cada planta.
3.9 ANTECEDENTES
A continuación se presentan algunos antecedentes de proyectos similares realizados en Colombia y el
extranjero.
3.9.1 Proyectos implementados con tecnología Zigbee
Para el estudio de los antecedentes y los diversos proyectos desarrollados en el tiempo que fueron
diseñados o planteados con el fin de dar una solución a un problema de carácter igual o similar al de
nuestro caso, tenemos que son muchos los aspectos que se asemejan para la elaboración de este
proyecto, como primera medida tenemos un sistema que se desarrolló en el año 2010 y se trata de un
control de temperatura que se monitorea y controla por medio de Zigbee aprovechando las ventajas de
este, por su trabajo inalámbrico, en dicho trabajo se presentan las ventajas que podrían presentarse al
aplicarlo como control de problemas de incendios y las ventajas o bondades que presentan los sensores
33
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
inalámbricos basados en Zigbee, tales como los diferentes transreceptores de baja potencia o sus
propiedades de aislamiento, su precisión y su fuerte inmunidad electromagnética, los cuales son aspectos
fundamentales muy importantes en las aplicaciones de medidas y control ya sea de temperatura, presión,
humedad etc. Del mismo modo evitan problemas de cableado que se podrían presentar, como el hecho
que se gaste o dañe el cableado ya sea por las temperaturas muy elevadas y así se asegura seguridad al
momento de trabajar con este sistema, ya que es fundamental realizar mediciones en tiempo real para
tener una buena vigilancia de los datos proporcionados para la toma de decisiones ya sea para este
proyecto con respecto a los incendios o de igual forma el que se pretende desarrollar para mantener un
estricto control de las plantas a tratar, porque la fiabilidad y seguridad de este tipo de proyectos dependen
de la seguridad como se tomen los datos, para las posteriores decisiones. En el caso del proyecto
nombrado anteriormente toman el sensor y analizan el factor de escala lineal que posee, para poder
proceder a hacer un análisis de cómo poder implementar esos datos a la hora de generar el respectivo
código a implementar, también eligen los demás componentes necesarios para el diseño del proyecto tales
como el microprocesador, el modulo LCD, y el sensor entre otros componentes adicionales que se
utilizaron. Básicamente toman los datos generados por el sensor para luego convertirlos a forma digital,
para que luego el microprocesador transmita esos datos por medio del módulo ZigBee a un ordenador.
También se especifica ciertos datos de compilación y lenguaje de programación utilizados para el
desarrollo de dicho proyecto [16].
Prosiguiendo con el análisis de proyectos afines se tiene el diseño de un sistema de seguimiento de
temperatura ZigBee en una red de sensores inalámbricos publicado en el año 2011, en donde dicha
propuesta pretende generar un monitoreo por medio de la recolección de datos gracias al módulo de
transmisión inalámbrica, para implementar en invernaderos ,en donde se resumen algunos pasos en el
comportamiento de todo el proceso para poder establecer el monitoreo de los datos de temperatura
deseados, en donde se tiene el sistema de red inalámbrica que incluye el sensor de temperatura, seguido
de un módulo de adquisición, luego un módulo de transferencia y por ultimo un módulo de visualización,
para lograr este propósito se desarrolló una red de monitoreo por ZigBee donde hay un coordinador que
recibe los datos de los sensores para posteriormente analizarlos en un ordenador especificando, dichos
datos entrarían por el puerto serial. También generan una descripción del comportamiento de cada nodo y
las componentes asociadas a cada uno de los sensores, cada nodo contenía tres acciones que cumplir
para que los datos pudieran llegar a cabalidad a su destino. Los módulos que se utilizaron en el proyecto
fueron uno de adquisición, de memoria (asociado al microprocesador), y por ultimo uno de comunicación
34
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
que para tal caso estaría refiriéndose al sistema inalámbrico, adicionalmente un diagrama de flujo fue
diseñado para poder generar y especificar la totalidad del proceso para adquisición de los datos que se
deseaban obtener, lo mismo que un diagrama de flujo para el proceso de recepción [17]. Lo que se puede
observar de estos dos artículos es la relación de adquisición de datos y proceso de envió, los cuales están
fuertemente relacionados con el modo a operar para la solución del proyecto a desarrollar, puesto que la
recogida de datos de humedad y el análisis que se pretende elaborar para la solución del cuidado de la
fresa es muy importante y viendo los resultados y los pasos de elaboración de estos sistemas de control y
monitoreo pueden dar una mirada más crítica y segura de cómo se puede proceder a efectuar una solución
confiable al problema.
Caso aparte un artículo de suma importancia elaborado en el año 2011 donde se diseña un sistema de
monitoreo de presión en una red de sensores inalámbricos por medio de ZigBee (Es importante estudiar
artículos que permitan tener una mirada clara de cómo proceder y trabajar con sistemas ZigBee debido a
que este sistema es el que se va a implementar en el proceso del proyecto) donde se hace hincapié en el
ahorro de energía aprovechando los estados de reposo del sensor, generando opiniones satisfactorias
sobre los bajos costos de la implementación y utilización de la red inalámbrica ZigBee, además de su
ventaja en factores críticos como para el caso de lugares de difícil acceso y su tamaño lo suficientemente
pequeño el cual permite una mejor implementación en diferentes tipos de lugares acomodándose de buena
manera a los espacios, lo que es favorable en la implementación e instalación en casi cualquier aplicación,
se presenta en la elaboración del circuito, la fuente de alimentación y los amplificadores asociados a los
sensores para que la gama de salida de voltaje sea mayor, también se tiene un maestro o coordinador de
toda la red el cual se compone de un microprocesador, una fuente de alimentación, un módulo de
recepción y un convertidor de nivel donde hacen referencia a su posible aplicación en edificios inteligentes
y su utilización en incendios [18] para lo cual es una importante referencia al aplicarla en el manejo del
agua que le puede llegar a las plantas de fresa que se van a trabajar.
3.9.2 Proyectos implementados utilizando PSoC
Para los procesos de riego por goteo en Colombia son muy pocos los avances en ello por eso la
importancia de desarrollar sistemas competentes que nos permitan estar a la altura de mercados cada vez
más exigentes y competitivos.
35
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Para ello se estudia un artículo en donde se diseña una unidad de control de riego por goteo utilizando
PSoC dicho artículo tiene una fecha de publicación del año 2009 elaborada en la India, donde se pretende
automatizar los sistemas de riego para dar soluciones a problemas de sequía y así tener un mejor
rendimiento en los cultivos haciendo referencia o hincapié a sistemas de siembra por hileras donde estos
cultivos requieren ciertas cantidades de humedad constantes para mantener las plantas en su mejor
desarrollo y crecimiento e identificar ciertos problemas y brindan una solución a dicho sistema (por hileras o
surcos) donde solo se suministra el agua en los puntos donde van las semillas dejando las áreas entre
surcos secas para evitar el crecimiento de maleza, de la misma manera brindar información importante de
las ventajas de sistemas de riego por goteo tales como evitar que el agua se evapore antes de penetrar el
suelo, como los métodos de siembra por hileras son más utilizados en cultivos de alimentos como cereales
o tubérculos como la papa estos requieren de fungicidas, lo cual otros sistemas de riego pueden generar
que estos químicos sean retirados de la planta en el respectivo riego, por lo que el sistema de riego por
goteo favorece este y muchos otros aspectos de cosecha de alimentos. También se explica la importancia
de los tamaños y conexiones de los tubos a implementar en el cultivo, evitando problemas de presión de
agua y así la irrigación en el cultivo pueda ser más uniforme, al igual que las cámaras que se utilizan para
regular el agua y su presión al salir por las tuberías, donde por medio de sensores distribuidos se recogen
datos tanto de humedad como de temperatura, en donde información llega a un micro controlador y por
consiguiente a un control de estado actual de las válvulas y visualizado en un módulo LCD, donde dichas
válvulas son solenoides y están controladas por el núcleo micro controlador por medio de controladores de
relé, aprovechan este sistema a la vez para mesclar con el agua pesticidas como también fertilizantes
ahorrando así procesos de fumigación y abonado en el cultivo, también adjuntan un medidor de flujo para
tener datos de las cantidades de agua totales utilizadas en los riegos, del mismo modo el uso de un
temporizador que se utilizada en caso de fallo de los sensores para determinar un tiempo límite de riego y
así pueda detenerse el riego o la irrigación. Se nombran las cintas de goteo laterales y las variadas que
pueden encontrarse para estos tipos de regadío según el tipo de cosechas, por último se consideran
cálculos con respecto a los consumos de agua por cultivo según su clase y tipo de cosecha, las distancias
entre hileras y el tamaño de estas al igual que los tiempos que se mantiene el regadío, y las ventajas de
automatizar los sistemas de riego para reducción de costos y mejor control de los cultivos [19].
36
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
3.9.3 Sistema implementado con base en una red inalámbrica
Otro de los sistemas de riego implementados y de gran valor de información es un diseño elaborado en
china en el año 2011 donde se plantea el diseño de un sistema red de control inteligente para irrigación por
goteo donde se plantea los problemas de los sistemas de regadío en ese lugar y las preferencias de la
gente por algunos métodos de regadío dado el ahorro de agua, donde se proponen la ubicación de n
cantidad de válvulas electromagnéticas comunicadas con n campos de control los cuales van a estar
comunicados por medio de sensores inalámbricos a un número n de campos de control los cuales van a
estar comunicados por medio de una red inalámbrica a una estación de control maestra, donde esta
monitoreara las anteriores fases del proceso. Las sub estaciones se encargarían de medir en tiempo real
los niveles de humedad, temperatura, intensidad lumínica del sol para realizar un análisis de las cantidades
de agua a enviar al cultivo, allí el campo de control se encarga de los interruptores que activarían las
válvulas para el regadío y a su vez comunicándose con la sub estación por medio de los sensores
inalámbricos. En dicho sistema se usan dos sistemas de redes de comunicación inalámbrica entre el
campo de control y la sub estación de control, planteando así un diagrama de flujo que analizara y
comparara las fallas y los datos para toma de decisiones [20].
Por otra parte es de suma importancia los proyectos enfocados al manejo de motores paso a paso debido
a que para el desarrollo del proyecto es importante que cada motor tenga la capacidad de colocar el riego
de fungicidas e insecticidas de forma correcta en cada planta, para ello se cuenta con un trabajo de
investigación en donde se trabaja el control de motores paso a paso por medio de micro controladores
mediante él envió de secuencias de impulsos al devanado del motor, lo que permite controlar tanto la
velocidad como el sentido de rotación de estos, permitiendo así generar algoritmos que permiten un mejor
manejo de estos motores y un envió de señales correctas para que su movimiento sea más preciso, de
manera tal que es de utilidad al momento de controlar el riego de fertilizante en el cultivo. [21]
Tal como en el anterior trabajo son muchos los artículos de interés que permiten mejorar la panorámica de
control de sistemas operados por motores pasó a paso y los diferentes tipos de motores que se podrían
implementar en algunos casos su control y trabajo dependiendo de la labor que deban desempeñar y de
37
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
sus ventajas y rendimiento para diseños tanto de rotación como de traslación el cual es importante para el
diseño de riego de fungicidas e insecticidas debido a la ubicación y la forma de sembrado de las plantas lo
cual requiere que el sistema se traslade de forma tal que cada una de las plantas sea fumigada. [22]
En si se han desarrollado he implementado proyectos de regadío de manera automática para cultivos
cereales, pero en muchos casos estos proyectos son para cultivos extensos, y se realizan con sistemas
controlados por PLC, son sistemas de un costo alto a los cuales no todas las personas puede acceder,
por ende se desea realizar el diseño de un sistema a bajo costo comenzando con un cultivo de tamaño
pequeño para analizar la viabilidad de este en aplicaciones de cultivos de grandes extensiones.
3.9.4 Automatización de un sistema de riego mediante un PLC S7200
Los ingenieros Daniel Gutiérrez, Paul Muñoz, Arturo Suarez de la Escuela de Ingeniería Meca trónica de la
Universidad Ricardo Palma en Perú implementaron un sistema de riego automático controlado mediante un
PLC s7200, mediante el cual ejecutaron el riego cada seis horas, se incorporaron en el sistema sensores
de humedad y sensores de luz LDR, los cuales enviaban la transducción de sus respectivas señales al
controlador PLC, el PLC a su vez enviaba una señal que activaba la apertura o cierre de una
electroválvula. En este proyecto se logró mejorar el consumo diario de agua para regadíos en un 71%
aproximadamente, de acuerdo con los estudios previos y posteriores al respectivo proyecto. [23].
38
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
4 METODOLOGÍA
En este punto del capítulo, se hace una descripción de la metodología implementada para el diseño,
instalación e implementación del sistema de riego y fertilización del cultivo de cereales, haciendo una
explicación de cada paso, los elementos utilizados y considerados en cada fase del diseño del sistema de
automatización.
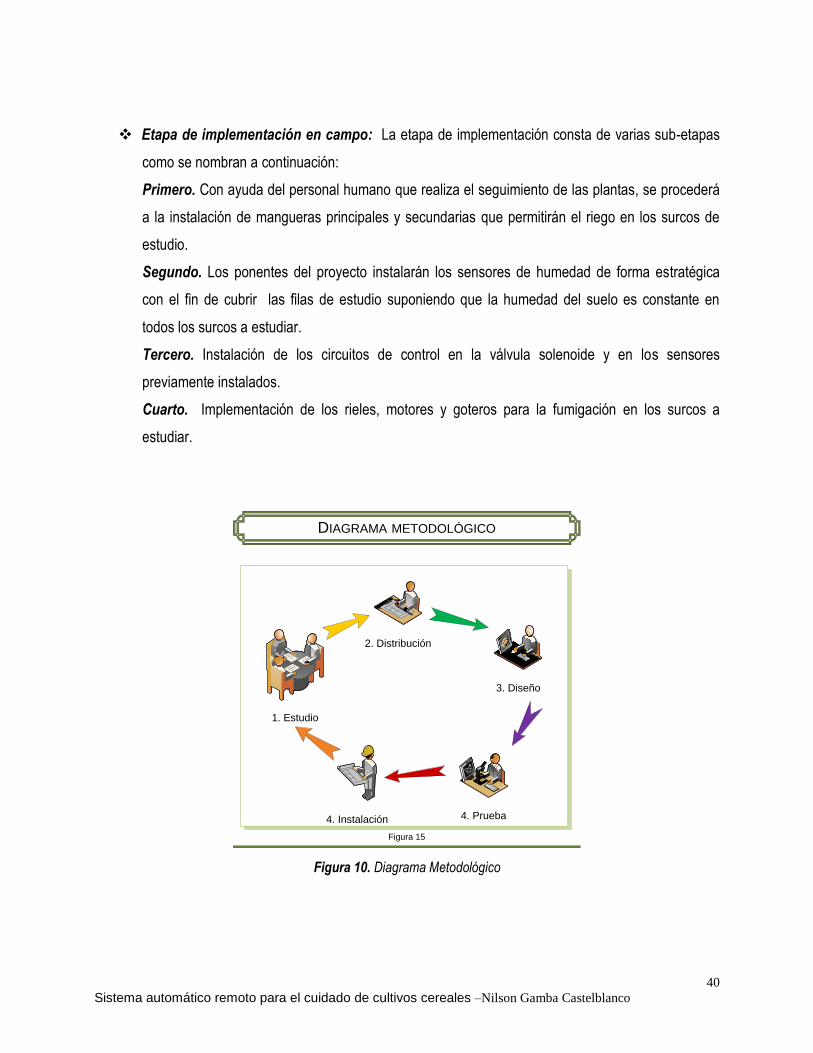
La planeación e investigación de este sistema requirió más que todo de datos aproximados en sus inicios
ya que las bases que se tienen de cantidades y cuidados de cultivos en la zonas Cundiboyacense son muy
pocas, haciendo de este proyecto un trabajo cuasi experimental, dando como resultado que en sus inicios
se tuviera que probar con muchos valores y variables hasta obtener resultados cada vez mejores o
favorables, en la figura 10 se muestra un diagrama que describe la metodología implementada para el
diseño e implementación del proyecto. En este diagrama metodológico, en su primera parte se estudia el
cultivo como tal, como se va a hacer la siembra, como se comporta el suelo y las propiedades de este,
donde y como se van a sembrar las primeras semillas, y un pequeño estudio para tener una base de
información con respecto al trato adecuado de las plantas, en este mismo punto se analiza toda esa
información, para elegir la opción u opciones más adecuadas en la implementación de sistema de
automatización.
Cuando estén germinando las primeras semillas, se comienza a elaborar un plan de distribución del cultivo
y del proyecto, con el fin de poder tener un espacio organizado para así poder hacer comparaciones y
análisis de los mejores resultados.
De manera paralela se comienza a hacer el diseño del sistema que permita la adquisición de datos y el
control de las necesidades del cultivo (sensor - actuador) y su posterior fabricación o elaboración para que
por último se pueda ir al lugar del cultivo para su instalación, y estudio.
39
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
4.1 Tipo de investigación y Enfoque investigativo
El tipo de investigación que se seguirá en el proyecto será experimental en donde todos los conocimientos
adquiridos a través de artículos, revistas, libros y documentales serán planteados y puestos a prueba en un
cultivo de cereales. A continuación se presenta etapa por etapa la consecución del proyecto para su
culminación.
Etapa de estudio: se evalúa el lugar donde se implementara el sistema de automatización de
cuidado de plantas cereales, las propiedades del lugar, el entorno, sus condiciones climáticas, para
lograr una mejor relación entre el dispositivo y el entorno.
Etapa de distribución: se adecua el terreno de acuerdo a las necesidades y propiedades del
sistema, las plantas y los dispositivos de control.
Etapa de diseño: A través de todo el conocimiento adquirido en la carrera y con ayuda de algunos
textos empezaremos a realizar el diseño del prototipo para su posterior implementación. Primero
se realizará la caracterización del sensor de humedad para la obtención de valores constantes en
la humedad del suelo.
Segundo. Diseño de un circuito de control y amplificación que permita manejar las válvulas a
través de niveles de voltaje fijos.
Tercero. Diseño de un circuito de control para manejar los motores y válvulas que esparcen los
fungicidas o insecticidas a las plantas
Etapa de pruebas: Con la fase de diseño ya culminada se empezará a realizar la calibración y
pruebas del módulo para la transmisión RF de los datos con los que se va a controlar las válvulas
tanto de agua como de fertilizante.
Con ayuda de elementos del laboratorio de ingeniería se procederá a realizar las pruebas de
transmisión del sensor hacia el ordenador y del ordenador hacia la válvula, donde una vez
comprobado el funcionamiento se empezara con la etapa de implementación.
40
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Etapa de implementación en campo: La etapa de implementación consta de varias sub-etapas
como se nombran a continuación:
Primero. Con ayuda del personal humano que realiza el seguimiento de las plantas, se procederá
a la instalación de mangueras principales y secundarias que permitirán el riego en los surcos de
estudio.
Segundo. Los ponentes del proyecto instalarán los sensores de humedad de forma estratégica
con el fin de cubrir las filas de estudio suponiendo que la humedad del suelo es constante en
todos los surcos a estudiar.
Tercero. Instalación de los circuitos de control en la válvula solenoide y en los sensores
previamente instalados.
Cuarto. Implementación de los rieles, motores y goteros para la fumigación en los surcos a
estudiar.
DIAGRAMA METODOLÓGICO
Figura 15
3. Diseño
1. Estudio
4. Instalación
2. Distribución
4. Prueba
Figura 10. Diagrama Metodológico
41
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
4.1.1 Estudio del lugar
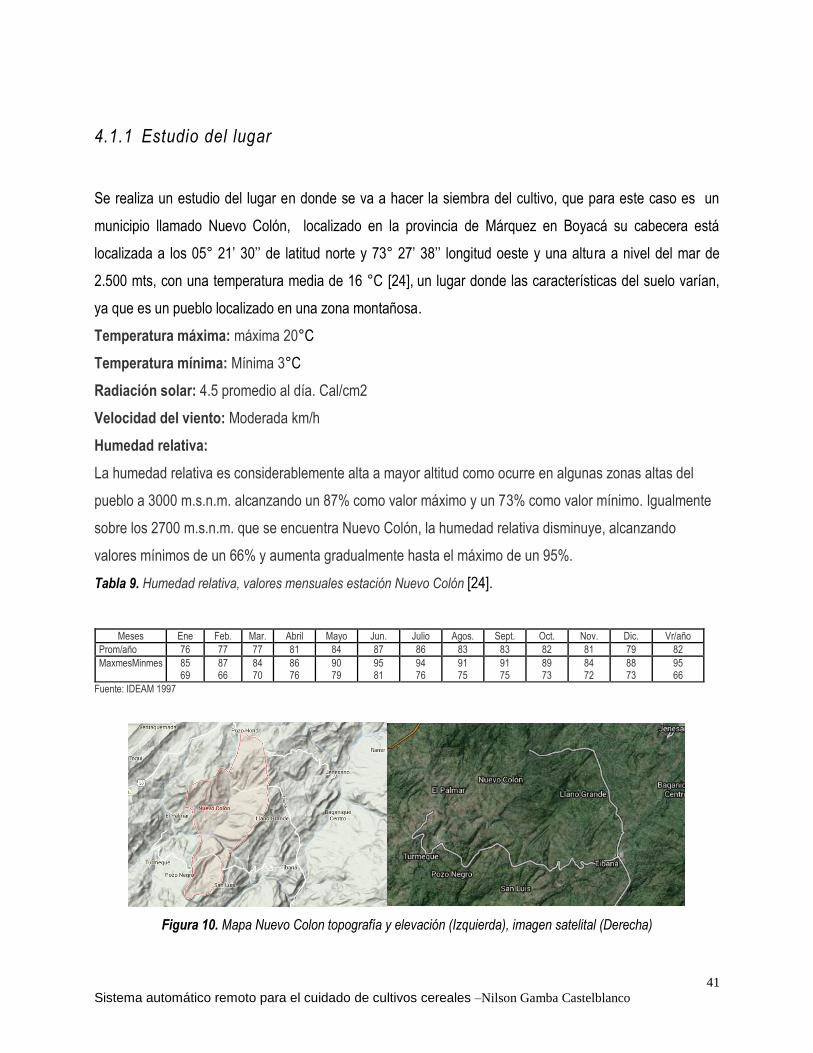
Se realiza un estudio del lugar en donde se va a hacer la siembra del cultivo, que para este caso es un
municipio llamado Nuevo Colón, localizado en la provincia de Márquez en Boyacá su cabecera está
localizada a los 05° 21’ 30’’ de latitud norte y 73° 27’ 38’’ longitud oeste y una altura a nivel del mar de
2.500 mts, con una temperatura media de 16 °C [24], un lugar donde las características del suelo varían,
ya que es un pueblo localizado en una zona montañosa.
Temperatura máxima: máxima 20°C
Temperatura mínima: Mínima 3°C
Radiación solar: 4.5 promedio al día. Cal/cm2
Velocidad del viento: Moderada km/h
Humedad relativa:
La humedad relativa es considerablemente alta a mayor altitud como ocurre en algunas zonas altas del
pueblo a 3000 m.s.n.m. alcanzando un 87% como valor máximo y un 73% como valor mínimo. Igualmente
sobre los 2700 m.s.n.m. que se encuentra Nuevo Colón, la humedad relativa disminuye, alcanzando
valores mínimos de un 66% y aumenta gradualmente hasta el máximo de un 95%.
Tabla 9. Humedad relativa, valores mensuales estación Nuevo Colón [24].
Meses Ene Feb. Mar. Abril Mayo Jun. Julio Agos. Sept. Oct. Nov. Dic. Vr/año Prom/año 76 77 77 81 84 87 86 83 83 82 81 79 82 MaxmesMinmes 85
69 87 66
84 70
86 76
90 79
95 81
94 76
91 75
91 75
89 73
84 72
88 73
95 66
Fuente: IDEAM 1997
Figura 10. Mapa Nuevo Colon topografía y elevación (Izquierda), imagen satelital (Derecha)
42
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
4.1.2 Distribución del terreno
1
A
B
5
5
Vin1
Vin2
Vout1
Vout1
Vout2
Vout2
Controlador
6
7
8
9
1112
4
1
3
3
Figura 12. Plano de planta para la distribución del sistema.
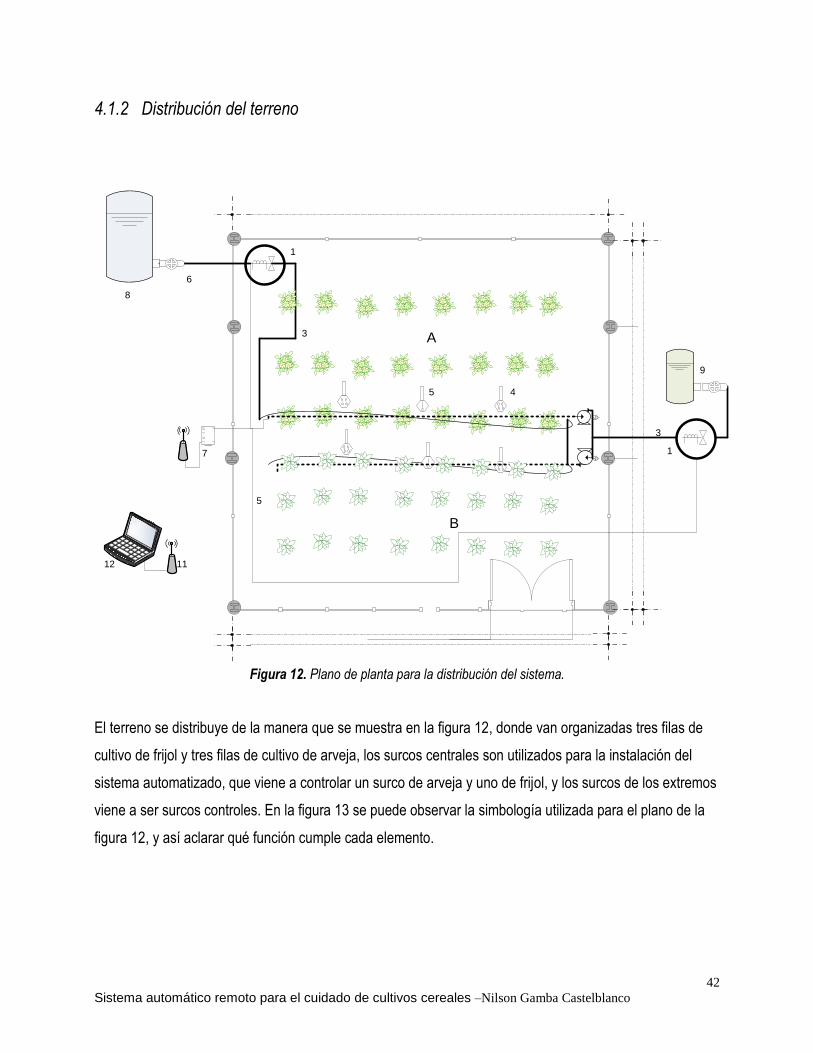
El terreno se distribuye de la manera que se muestra en la figura 12, donde van organizadas tres filas de
cultivo de frijol y tres filas de cultivo de arveja, los surcos centrales son utilizados para la instalación del
sistema automatizado, que viene a controlar un surco de arveja y uno de frijol, y los surcos de los extremos
viene a ser surcos controles. En la figura 13 se puede observar la simbología utilizada para el plano de la
figura 12, y así aclarar qué función cumple cada elemento.
43
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Vin1
Vin2
Vout1
Vout1
Vout2
Vout2
Controlador
1. Válvula
solenoide2. Válvula
manual
3. Línea de
tubería
4. Sensor de
humedad
5. Sensor de
temperatura
10. Sistema de
fumigacion
6. Grifo de
tubería
Línea de goteo
7. Circuito de
control
Figura 16
SIMBOLOGIA
C. Planta de
arvejaB. Planta de frijol
8. tanque de
agua
9. tanque de
fertilizante
12. ordenador
11. sistema
inalámbrico
XBee
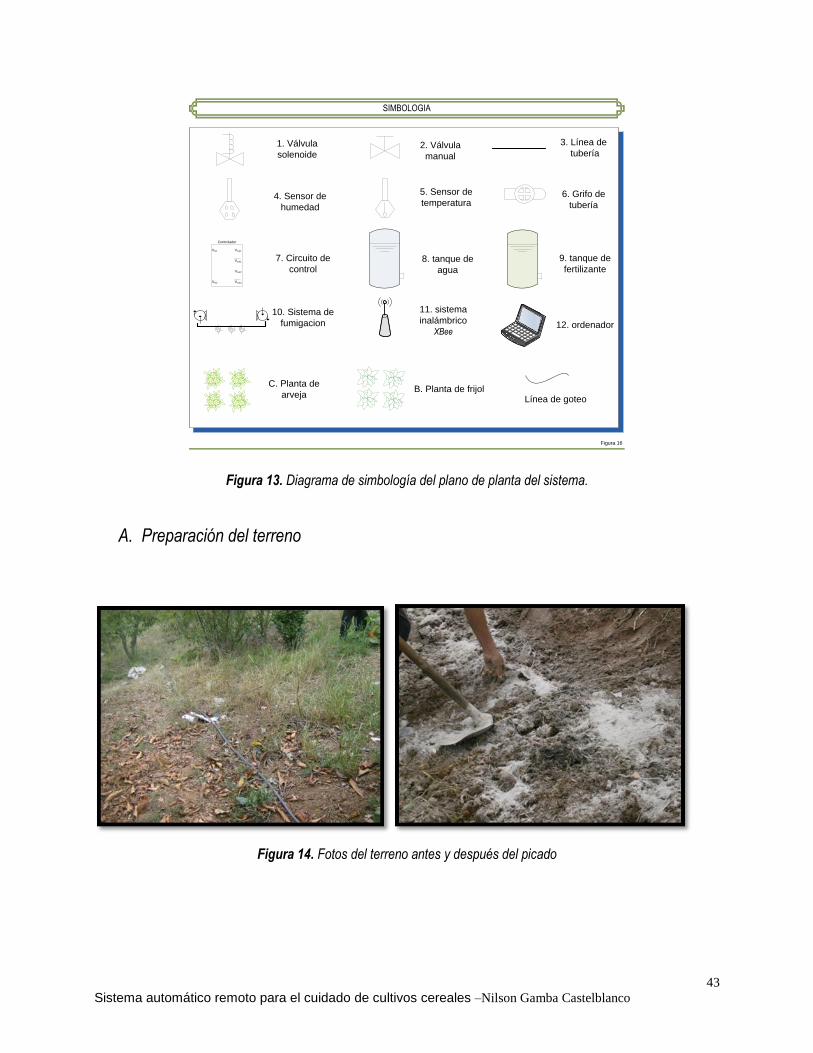
Figura 13. Diagrama de simbología del plano de planta del sistema.
A. Preparación del terreno
Figura 14. Fotos del terreno antes y después del picado
44
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Se cuenta con un terreno sin cultivar ya hace mucho tiempo, al cual se le hace un “picado” para
que la tierra quede blanda y se oxigene, siguiente paso se procede a quitar la maleza o hierba que
pueda quitarle nutrientes al cultivo, después se desinfecta la tierra con cal y ceniza para evitar que
babosas y demás insectos puedan hacer daño a las semillas y estas no puedan germinar, por
último se realiza la siembra, como se puede ver en la figura 15.
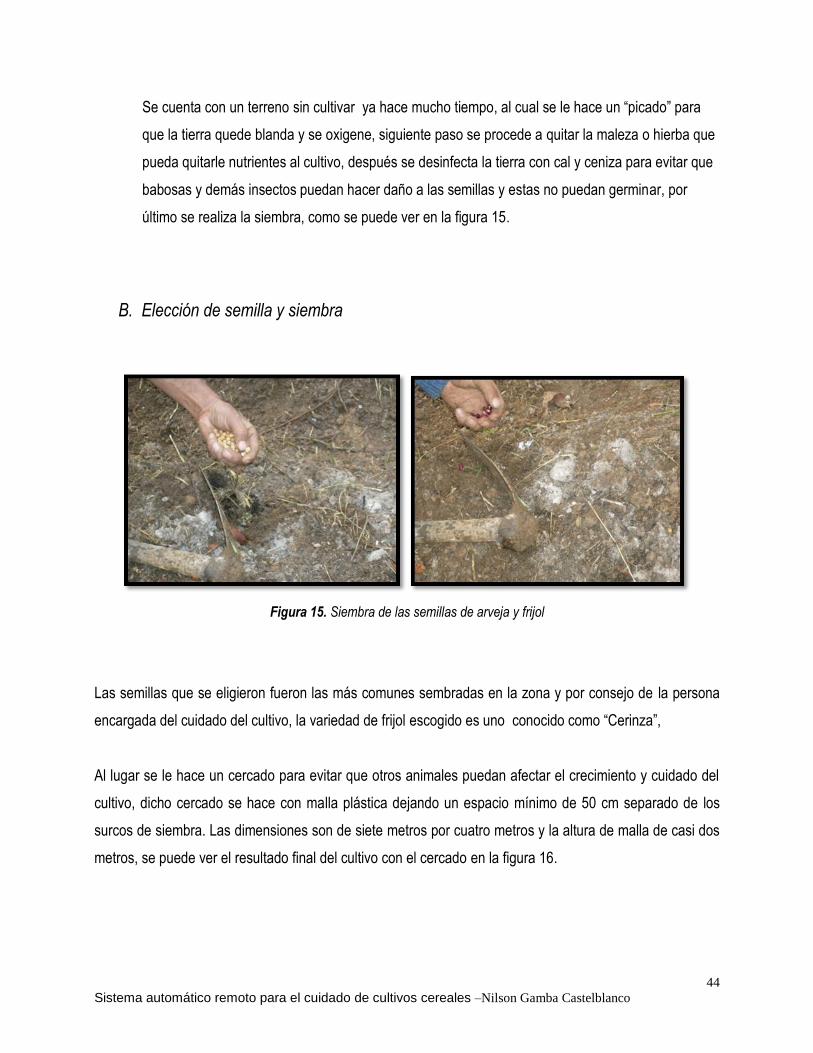
B. Elección de semilla y siembra
Figura 15. Siembra de las semillas de arveja y frijol
Las semillas que se eligieron fueron las más comunes sembradas en la zona y por consejo de la persona
encargada del cuidado del cultivo, la variedad de frijol escogido es uno conocido como “Cerinza”,
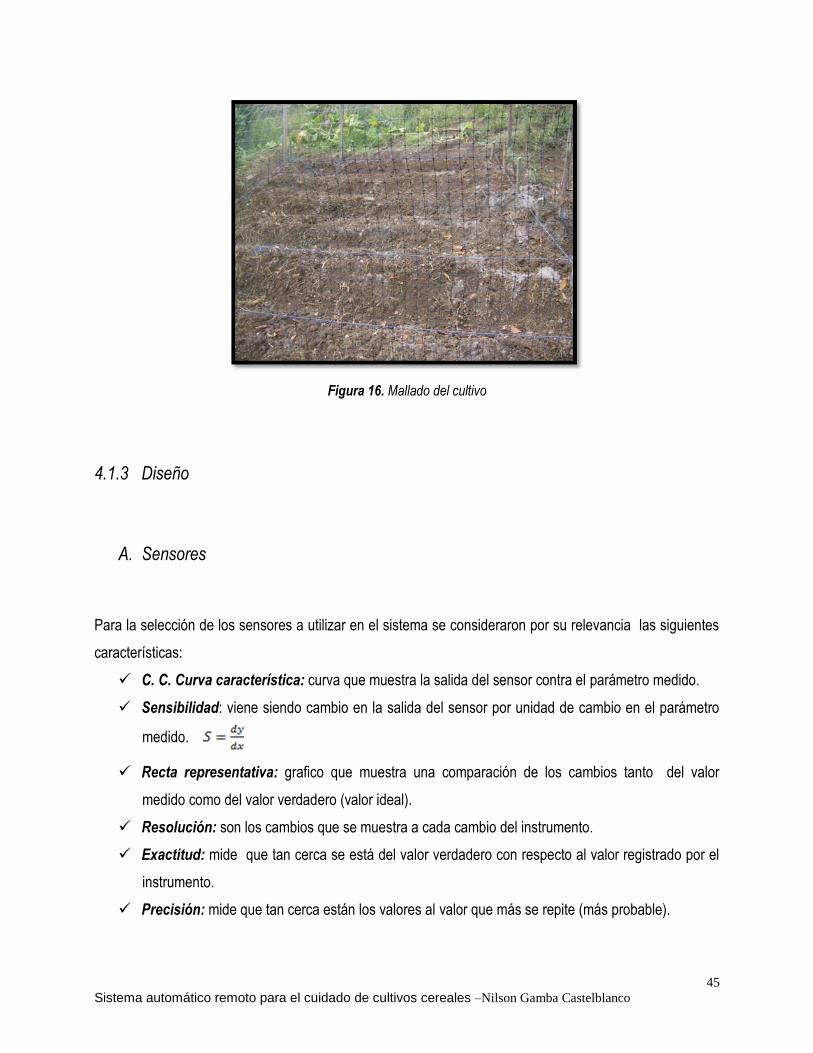
Al lugar se le hace un cercado para evitar que otros animales puedan afectar el crecimiento y cuidado del
cultivo, dicho cercado se hace con malla plástica dejando un espacio mínimo de 50 cm separado de los
surcos de siembra. Las dimensiones son de siete metros por cuatro metros y la altura de malla de casi dos
metros, se puede ver el resultado final del cultivo con el cercado en la figura 16.
45
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 16. Mallado del cultivo
4.1.3 Diseño
A. Sensores
Para la selección de los sensores a utilizar en el sistema se consideraron por su relevancia las siguientes
características:
C. C. Curva característica: curva que muestra la salida del sensor contra el parámetro medido.
Sensibilidad: viene siendo cambio en la salida del sensor por unidad de cambio en el parámetro
medido.
Recta representativa: grafico que muestra una comparación de los cambios tanto del valor
medido como del valor verdadero (valor ideal).
Resolución: son los cambios que se muestra a cada cambio del instrumento.
Exactitud: mide que tan cerca se está del valor verdadero con respecto al valor registrado por el
instrumento.
Precisión: mide que tan cerca están los valores al valor que más se repite (más probable).
46
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
B. Curva característica
Para cada sensor se realizaron mediciones, con instrumentos adecuados como un multimetro de precisión,
y se crea un entorno controlado para registrar cada cambio en estos dispositivos.
Para realizar las mediciones del sensor de temperatura LM 35 se diseña un mini horno con una bombilla
eléctrica de 120W que va calentando el entorno dentro del mini horno y a su vez al sensor, cada cambio en
el sensor se va registrando con el milímetro de precisión y con otro dispositivo se va registrando la
temperatura.
Figura 17. Medición de los cambios a la salida en el sensor LM35
Con los datos obtenidos posteriormente se realiza la curva de comparación con el valor de estimulación
hacia el sensor contra el valor medido en este.
Donde el grado de sensibilidad del sensor suministrado por el fabricante es:
Que como ejemplo tenemos que si la temperatura llega a ser de 15°C el valor medido en el sensor debe
estar en los 150
Otra de las características de este sensor que suministra su fabricante es su buen funcionamiento entre los
5 y 25 que resulta ser un muy buen rango debido a las condiciones climáticas del lugar donde se va a
instalar el dispositivo, donde sus temperaturas mínimas oscilan entre los 3°C y máximas entre los 20°C.
47
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
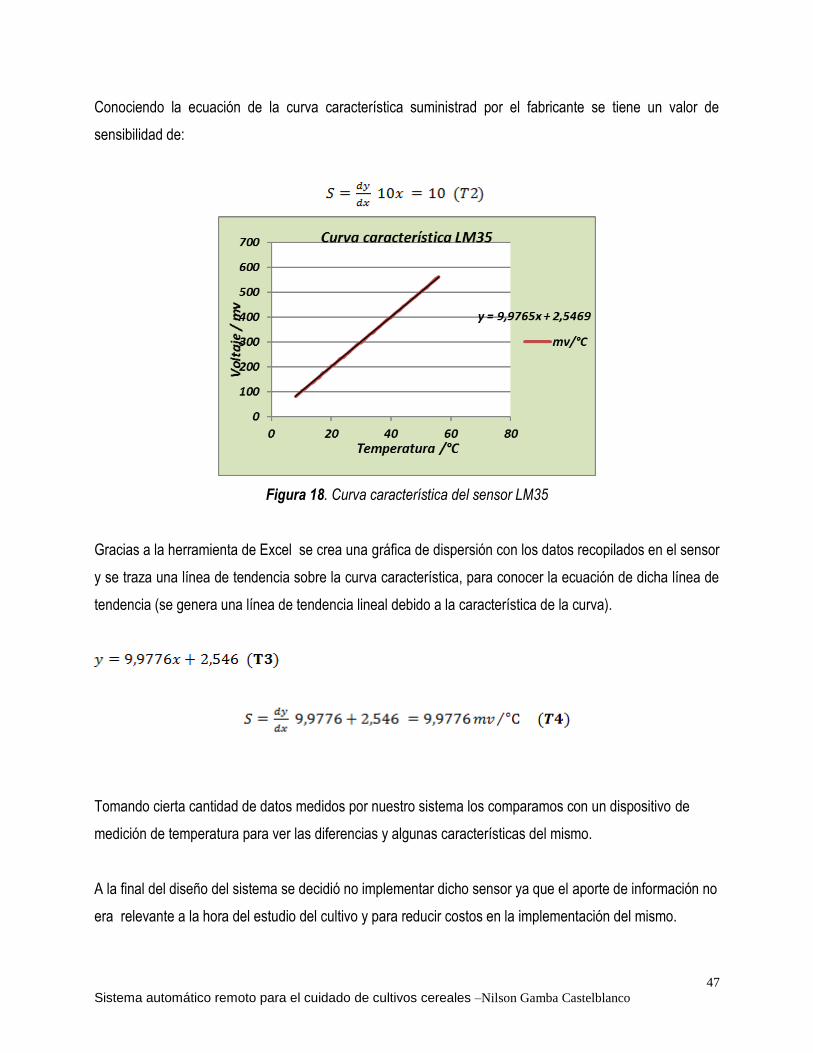
Conociendo la ecuación de la curva característica suministrad por el fabricante se tiene un valor de
sensibilidad de:
Figura 18. Curva característica del sensor LM35
Gracias a la herramienta de Excel se crea una gráfica de dispersión con los datos recopilados en el sensor
y se traza una línea de tendencia sobre la curva característica, para conocer la ecuación de dicha línea de
tendencia (se genera una línea de tendencia lineal debido a la característica de la curva).
Tomando cierta cantidad de datos medidos por nuestro sistema los comparamos con un dispositivo de
medición de temperatura para ver las diferencias y algunas características del mismo.
A la final del diseño del sistema se decidió no implementar dicho sensor ya que el aporte de información no
era relevante a la hora del estudio del cultivo y para reducir costos en la implementación del mismo.
48
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
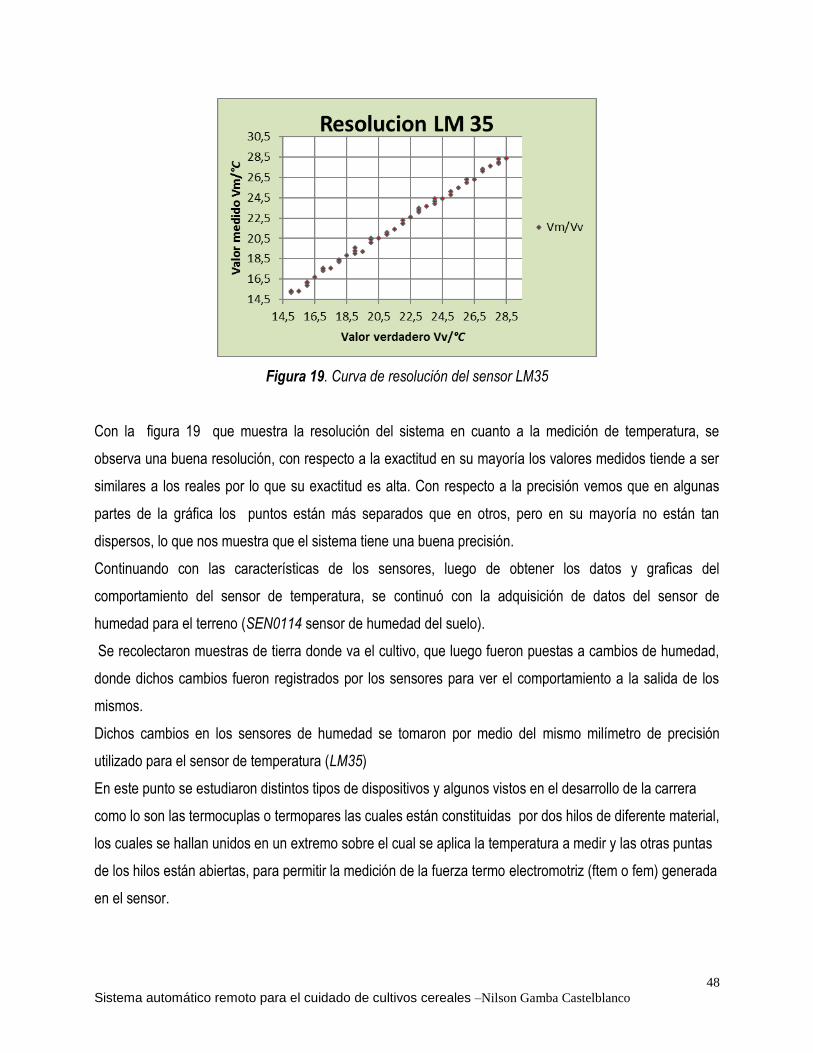
Figura 19. Curva de resolución del sensor LM35
Con la figura 19 que muestra la resolución del sistema en cuanto a la medición de temperatura, se
observa una buena resolución, con respecto a la exactitud en su mayoría los valores medidos tiende a ser
similares a los reales por lo que su exactitud es alta. Con respecto a la precisión vemos que en algunas
partes de la gráfica los puntos están más separados que en otros, pero en su mayoría no están tan
dispersos, lo que nos muestra que el sistema tiene una buena precisión.
Continuando con las características de los sensores, luego de obtener los datos y graficas del
comportamiento del sensor de temperatura, se continuó con la adquisición de datos del sensor de
humedad para el terreno (SEN0114 sensor de humedad del suelo).
Se recolectaron muestras de tierra donde va el cultivo, que luego fueron puestas a cambios de humedad,
donde dichos cambios fueron registrados por los sensores para ver el comportamiento a la salida de los
mismos.
Dichos cambios en los sensores de humedad se tomaron por medio del mismo milímetro de precisión
utilizado para el sensor de temperatura (LM35)
En este punto se estudiaron distintos tipos de dispositivos y algunos vistos en el desarrollo de la carrera
como lo son las termocuplas o termopares las cuales están constituidas por dos hilos de diferente material,
los cuales se hallan unidos en un extremo sobre el cual se aplica la temperatura a medir y las otras puntas
de los hilos están abiertas, para permitir la medición de la fuerza termo electromotriz (ftem o fem) generada
en el sensor.
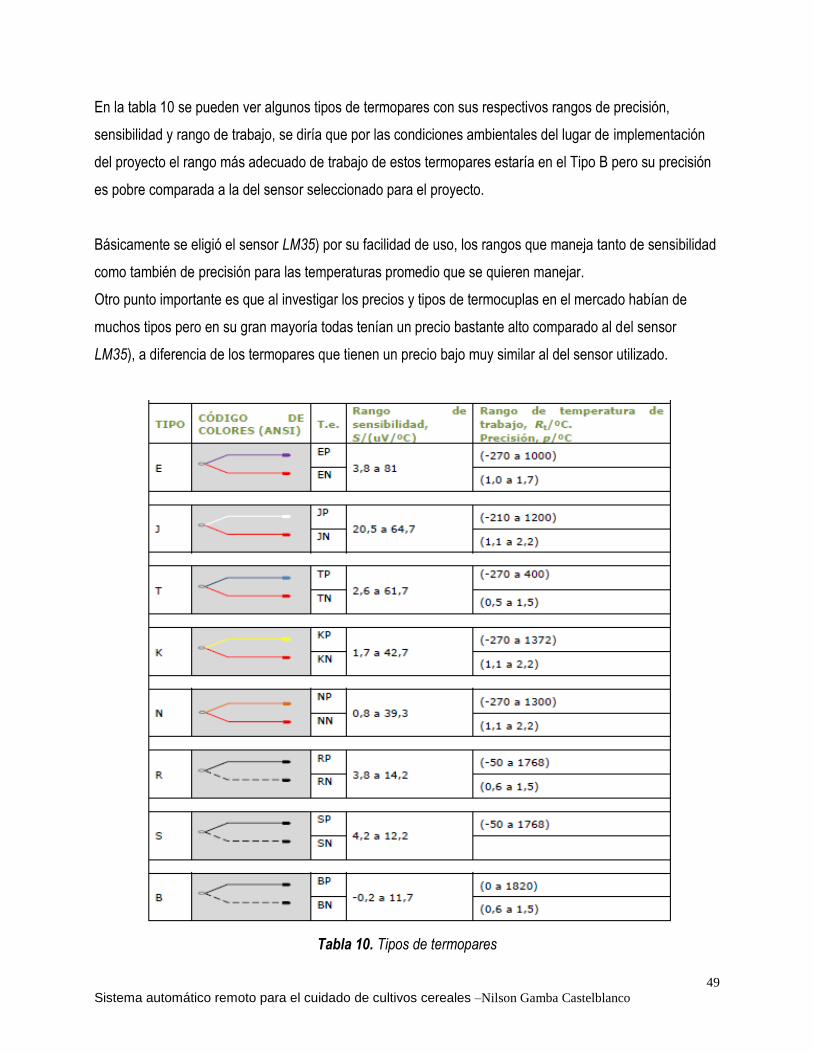
49
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
En la tabla 10 se pueden ver algunos tipos de termopares con sus respectivos rangos de precisión,
sensibilidad y rango de trabajo, se diría que por las condiciones ambientales del lugar de implementación
del proyecto el rango más adecuado de trabajo de estos termopares estaría en el Tipo B pero su precisión
es pobre comparada a la del sensor seleccionado para el proyecto.
Básicamente se eligió el sensor LM35) por su facilidad de uso, los rangos que maneja tanto de sensibilidad
como también de precisión para las temperaturas promedio que se quieren manejar.
Otro punto importante es que al investigar los precios y tipos de termocuplas en el mercado habían de
muchos tipos pero en su gran mayoría todas tenían un precio bastante alto comparado al del sensor
LM35), a diferencia de los termopares que tienen un precio bajo muy similar al del sensor utilizado.
Tabla 10. Tipos de termopares

50
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 20. Curva característica del sensor LM35
Con la herramienta de Excel se crea una gráfica de dispersión con los datos recopilados en el sensor y se
traza una línea de tendencia sobre la curva característica, para conocer la ecuación de dicha línea de
tendencia
Tabla 8. Comparación sensores de humedad [14]
Tipo de Sensor Característica Precio
SEN 0-114 Consumo Energía.
3.3V
Consumo corriente 35 mA.
(Azul: Salida análoga)
(Rojo: Power)
(Negro: Tierra)
Uso en suelos
Rango de valores:
1. 0 ~ 300: suelo seco.
COL$13.000
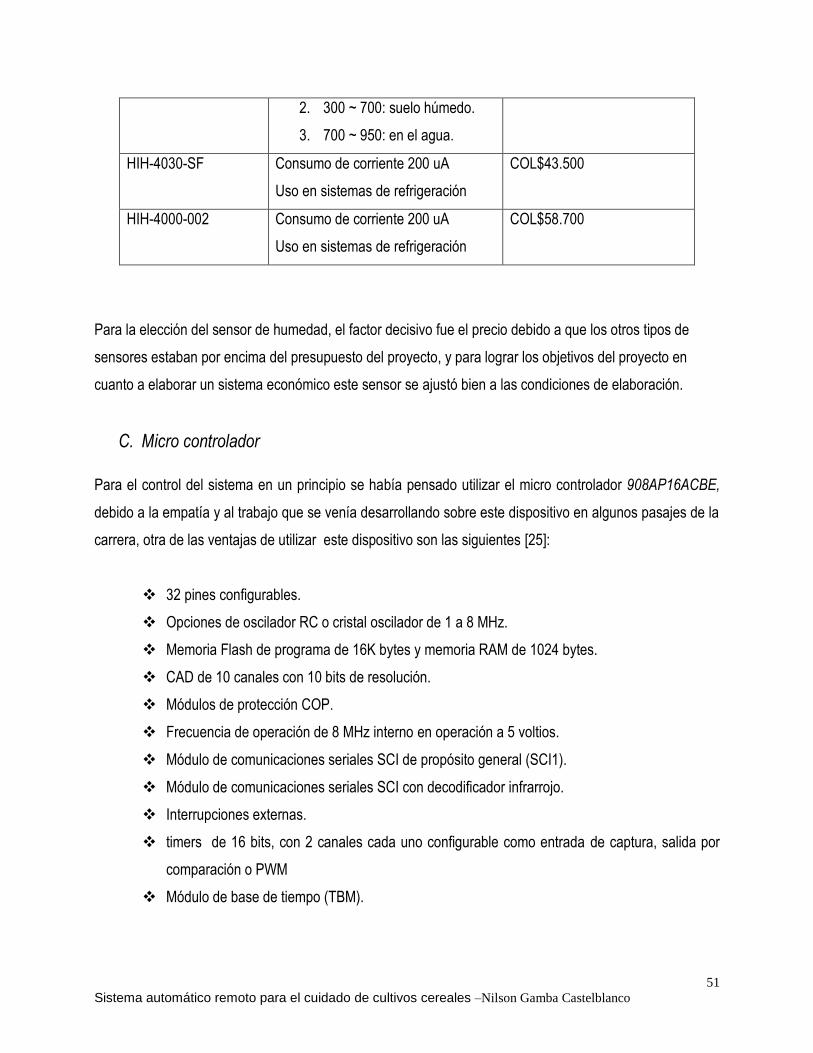
51
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
2. 300 ~ 700: suelo húmedo.
3. 700 ~ 950: en el agua.
HIH-4030-SF Consumo de corriente 200 uA
Uso en sistemas de refrigeración
COL$43.500
HIH-4000-002 Consumo de corriente 200 uA
Uso en sistemas de refrigeración
COL$58.700
Para la elección del sensor de humedad, el factor decisivo fue el precio debido a que los otros tipos de
sensores estaban por encima del presupuesto del proyecto, y para lograr los objetivos del proyecto en
cuanto a elaborar un sistema económico este sensor se ajustó bien a las condiciones de elaboración.
C. Micro controlador
Para el control del sistema en un principio se había pensado utilizar el micro controlador 908AP16ACBE,
debido a la empatía y al trabajo que se venía desarrollando sobre este dispositivo en algunos pasajes de la
carrera, otra de las ventajas de utilizar este dispositivo son las siguientes [25]:
32 pines configurables.
Opciones de oscilador RC o cristal oscilador de 1 a 8 MHz.
Memoria Flash de programa de 16K bytes y memoria RAM de 1024 bytes.
CAD de 10 canales con 10 bits de resolución.
Módulos de protección COP.
Frecuencia de operación de 8 MHz interno en operación a 5 voltios.
Módulo de comunicaciones seriales SCI de propósito general (SCI1).
Módulo de comunicaciones seriales SCI con decodificador infrarrojo.
Interrupciones externas.
timers de 16 bits, con 2 canales cada uno configurable como entrada de captura, salida por
comparación o PWM
Módulo de base de tiempo (TBM).
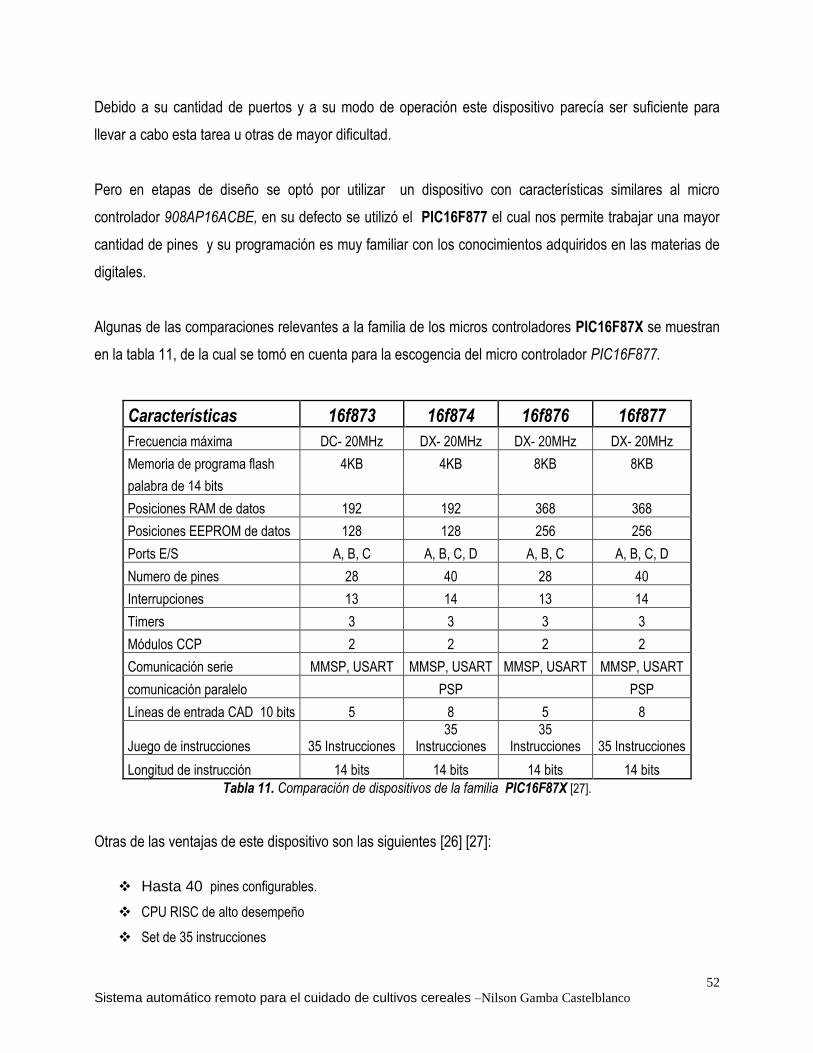
52
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Debido a su cantidad de puertos y a su modo de operación este dispositivo parecía ser suficiente para
llevar a cabo esta tarea u otras de mayor dificultad.
Pero en etapas de diseño se optó por utilizar un dispositivo con características similares al micro
controlador 908AP16ACBE, en su defecto se utilizó el PIC16F877 el cual nos permite trabajar una mayor
cantidad de pines y su programación es muy familiar con los conocimientos adquiridos en las materias de
digitales.
Algunas de las comparaciones relevantes a la familia de los micros controladores PIC16F87X se muestran
en la tabla 11, de la cual se tomó en cuenta para la escogencia del micro controlador PIC16F877.
Características 16f873 16f874 16f876 16f877
Frecuencia máxima DC- 20MHz DX- 20MHz DX- 20MHz DX- 20MHz
Memoria de programa flash 4KB 4KB 8KB 8KB
palabra de 14 bits
Posiciones RAM de datos 192 192 368 368
Posiciones EEPROM de datos 128 128 256 256
Ports E/S A, B, C A, B, C, D A, B, C A, B, C, D
Numero de pines 28 40 28 40
Interrupciones 13 14 13 14
Timers 3 3 3 3
Módulos CCP 2 2 2 2
Comunicación serie MMSP, USART MMSP, USART MMSP, USART MMSP, USART
comunicación paralelo PSP PSP
Líneas de entrada CAD 10 bits 5 8 5 8
Juego de instrucciones 35 Instrucciones 35
Instrucciones 35
Instrucciones 35 Instrucciones
Longitud de instrucción 14 bits 14 bits 14 bits 14 bits Tabla 11. Comparación de dispositivos de la familia PIC16F87X [27].
Otras de las ventajas de este dispositivo son las siguientes [26] [27]:
Hasta 40 pines configurables.
CPU RISC de alto desempeño
Set de 35 instrucciones
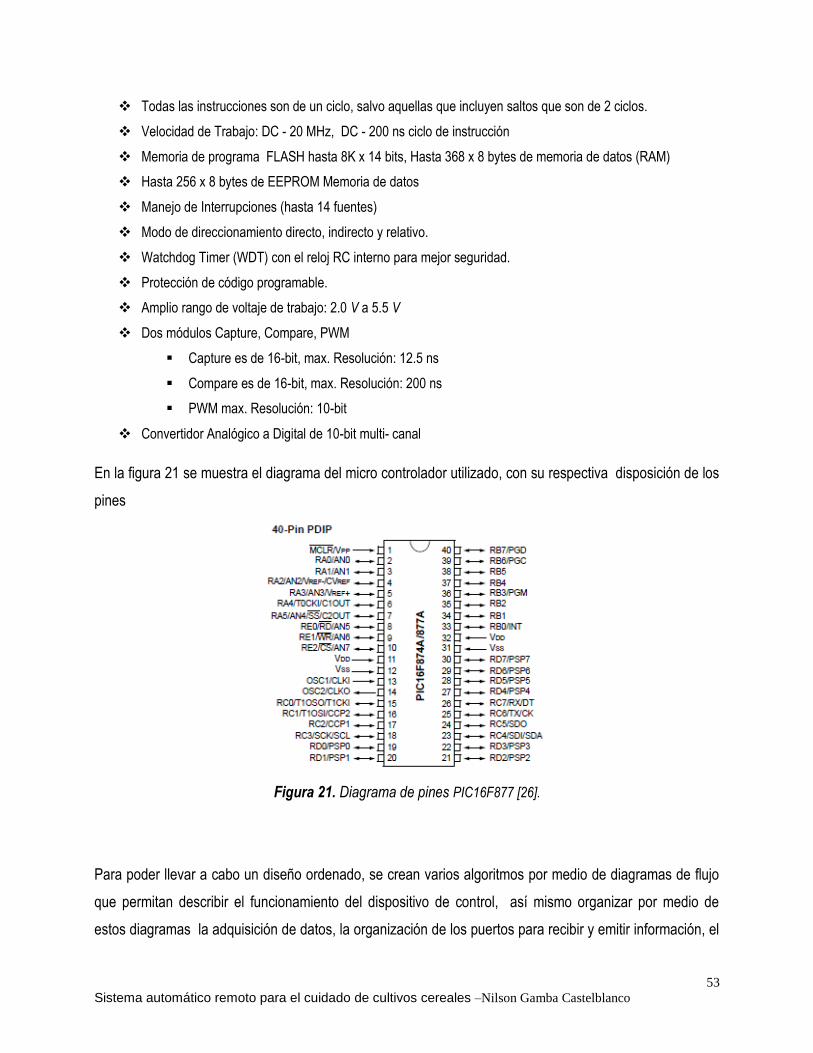
53
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Todas las instrucciones son de un ciclo, salvo aquellas que incluyen saltos que son de 2 ciclos.
Velocidad de Trabajo: DC - 20 MHz, DC - 200 ns ciclo de instrucción
Memoria de programa FLASH hasta 8K x 14 bits, Hasta 368 x 8 bytes de memoria de datos (RAM)
Hasta 256 x 8 bytes de EEPROM Memoria de datos
Manejo de Interrupciones (hasta 14 fuentes)
Modo de direccionamiento directo, indirecto y relativo.
Watchdog Timer (WDT) con el reloj RC interno para mejor seguridad.
Protección de código programable.
Amplio rango de voltaje de trabajo: 2.0 V a 5.5 V
Dos módulos Capture, Compare, PWM
Capture es de 16-bit, max. Resolución: 12.5 ns
Compare es de 16-bit, max. Resolución: 200 ns
PWM max. Resolución: 10-bit
Convertidor Analógico a Digital de 10-bit multi- canal
En la figura 21 se muestra el diagrama del micro controlador utilizado, con su respectiva disposición de los
pines
Figura 21. Diagrama de pines PIC16F877 [26].
Para poder llevar a cabo un diseño ordenado, se crean varios algoritmos por medio de diagramas de flujo
que permitan describir el funcionamiento del dispositivo de control, así mismo organizar por medio de
estos diagramas la adquisición de datos, la organización de los puertos para recibir y emitir información, el
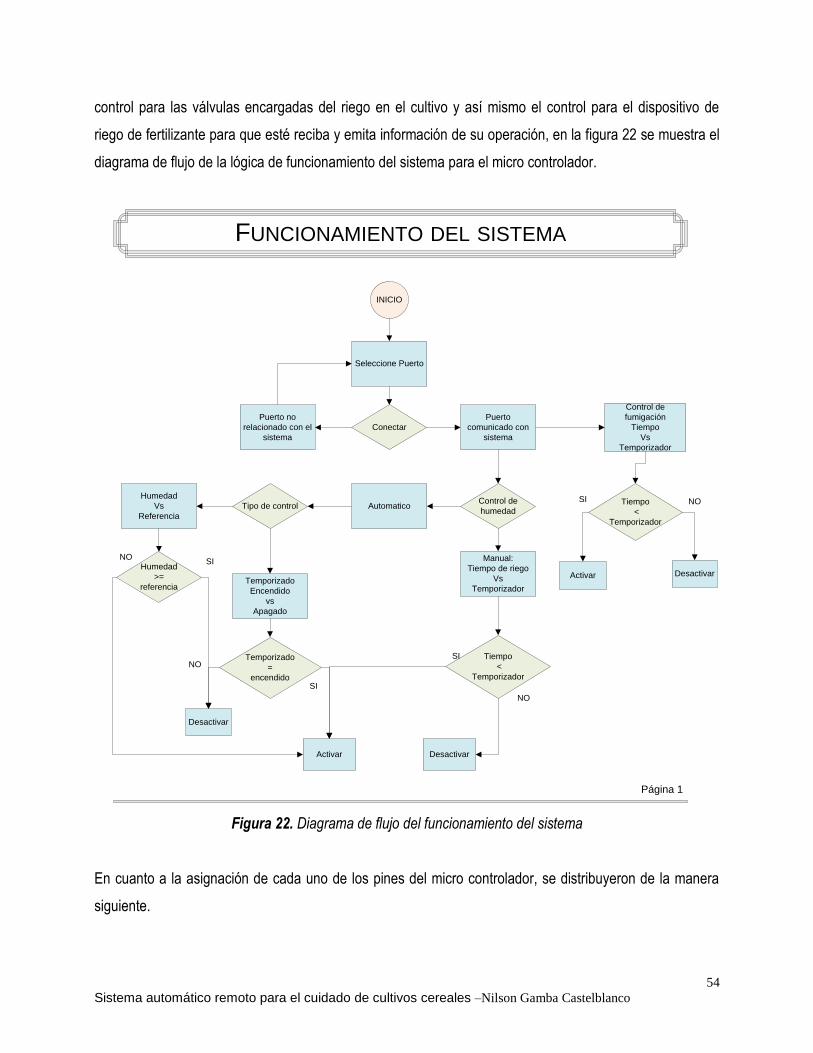
54
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
control para las válvulas encargadas del riego en el cultivo y así mismo el control para el dispositivo de
riego de fertilizante para que esté reciba y emita información de su operación, en la figura 22 se muestra el
diagrama de flujo de la lógica de funcionamiento del sistema para el micro controlador.
Seleccione Puerto
INICIO
Conectar
Puerto no
relacionado con el
sistema
Puerto
comunicado con
sistema
Control de
humedadAutomatico
Manual:
Tiempo de riego
Vs
TemporizadorTemporizado
Encendido
vs
Apagado
Tipo de control
Humedad
Vs
Referencia
Activar
Temporizado
=
encendido
Desactivar
Humedad
>=
referencia
SI
NO
SI
NO
Tiempo
<
Temporizador
SI
Desactivar
NO
Control de
fumigación
Tiempo
Vs
Temporizador
Tiempo
<
Temporizador
Activar Desactivar
Página 1
FUNCIONAMIENTO DEL SISTEMA
NOSI
Figura 22. Diagrama de flujo del funcionamiento del sistema
En cuanto a la asignación de cada uno de los pines del micro controlador, se distribuyeron de la manera
siguiente.
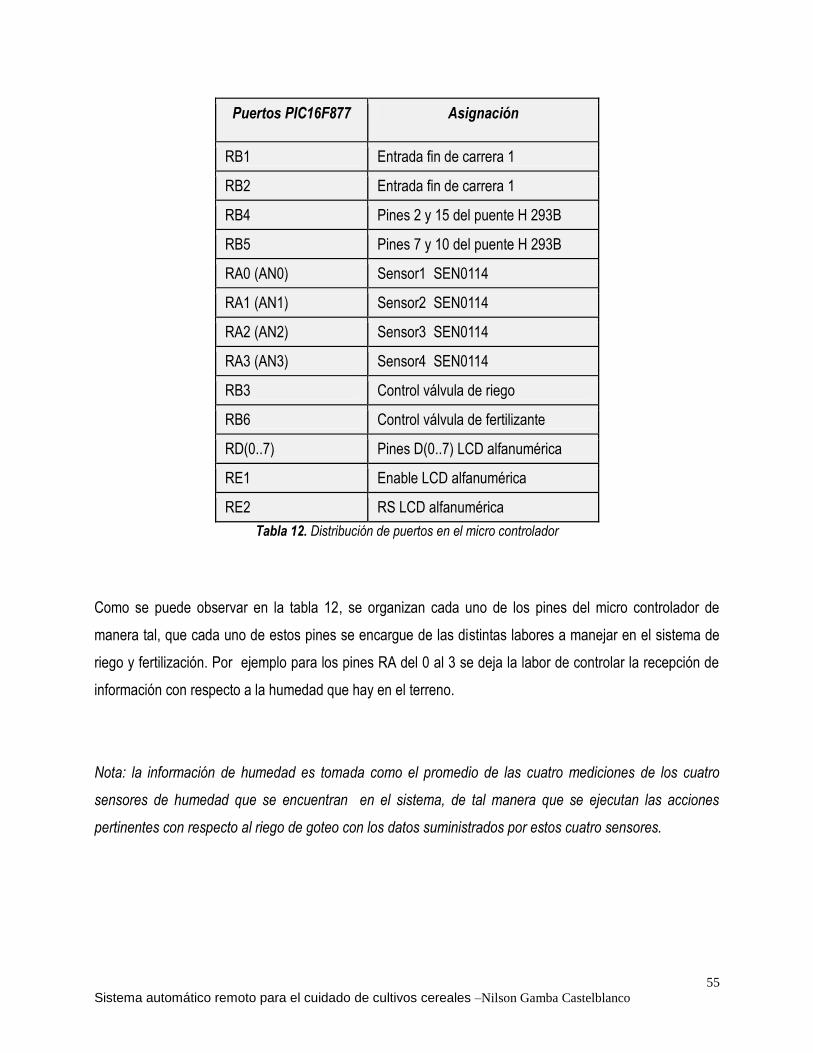
55
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Puertos PIC16F877 Asignación
RB1 Entrada fin de carrera 1
RB2 Entrada fin de carrera 1
RB4 Pines 2 y 15 del puente H 293B
RB5 Pines 7 y 10 del puente H 293B
RA0 (AN0) Sensor1 SEN0114
RA1 (AN1) Sensor2 SEN0114
RA2 (AN2) Sensor3 SEN0114
RA3 (AN3) Sensor4 SEN0114
RB3 Control válvula de riego
RB6 Control válvula de fertilizante
RD(0..7) Pines D(0..7) LCD alfanumérica
RE1 Enable LCD alfanumérica
RE2 RS LCD alfanumérica
Tabla 12. Distribución de puertos en el micro controlador
Como se puede observar en la tabla 12, se organizan cada uno de los pines del micro controlador de
manera tal, que cada uno de estos pines se encargue de las distintas labores a manejar en el sistema de
riego y fertilización. Por ejemplo para los pines RA del 0 al 3 se deja la labor de controlar la recepción de
información con respecto a la humedad que hay en el terreno.
Nota: la información de humedad es tomada como el promedio de las cuatro mediciones de los cuatro
sensores de humedad que se encuentran en el sistema, de tal manera que se ejecutan las acciones
pertinentes con respecto al riego de goteo con los datos suministrados por estos cuatro sensores.

56
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
D. Emulación
Una vez obtenida la información que entrega el sensor, se busca acondicionar la señal con el fin de
obtener un valor de medida que sea proporcional o que sea función lineal del nivel de la magnitud que
afecto al sensor en las mediciones [28].
Figura 23. Proceso de emulación digital en la cadena de medida [28].
Para el cuantificador, CAD, este transforma la función de la magnitud medida en un código digital
representado como:
Donde es la resolución del CAD
Donde es el número de bits.
Tomando la ecuación , con una conversión de y un voltaje de referencia de tenemos:
Para hallar la conversión CAD del sensor de temperatura LM35 se realiza tomando el resultado de y
en y sabiendo que la sensibilidad témenos:
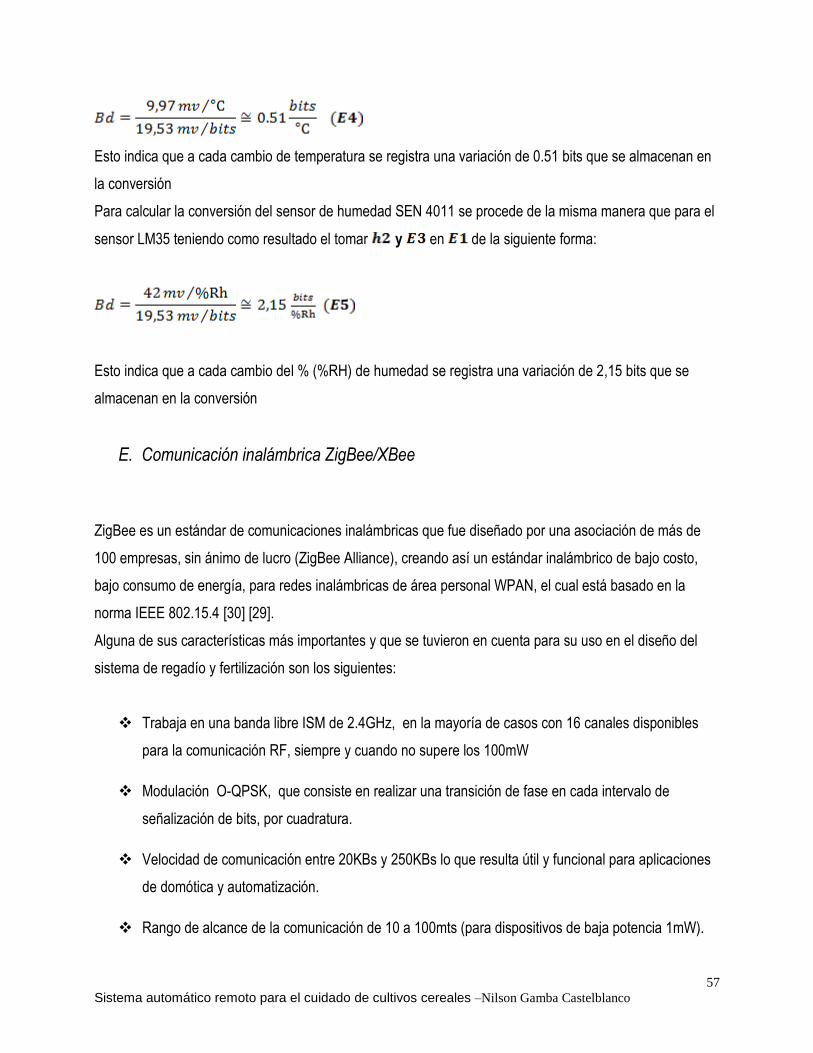
57
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Esto indica que a cada cambio de temperatura se registra una variación de 0.51 bits que se almacenan en
la conversión
Para calcular la conversión del sensor de humedad SEN 4011 se procede de la misma manera que para el
sensor LM35 teniendo como resultado el tomar y en de la siguiente forma:
Esto indica que a cada cambio del % (%RH) de humedad se registra una variación de 2,15 bits que se
almacenan en la conversión
E. Comunicación inalámbrica ZigBee/XBee
ZigBee es un estándar de comunicaciones inalámbricas que fue diseñado por una asociación de más de
100 empresas, sin ánimo de lucro (ZigBee Alliance), creando así un estándar inalámbrico de bajo costo,
bajo consumo de energía, para redes inalámbricas de área personal WPAN, el cual está basado en la
norma IEEE 802.15.4 [30] [29].
Alguna de sus características más importantes y que se tuvieron en cuenta para su uso en el diseño del
sistema de regadío y fertilización son los siguientes:
Trabaja en una banda libre ISM de 2.4GHz, en la mayoría de casos con 16 canales disponibles
para la comunicación RF, siempre y cuando no supere los 100mW
Modulación O-QPSK, que consiste en realizar una transición de fase en cada intervalo de
señalización de bits, por cuadratura.
Velocidad de comunicación entre 20KBs y 250KBs lo que resulta útil y funcional para aplicaciones
de domótica y automatización.
Rango de alcance de la comunicación de 10 a 100mts (para dispositivos de baja potencia 1mW).
58
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Sensibilidad en el receptor de -85dBm en la banda en que opera (2.4GHz)
Direccionamiento de la red en formato de o 64 bits
Soporta diversas topologías de red típicas: punto a punto, estrella, malla, árbol.
Bajo consumo de energía.
Uso de bandas de radio libres y sin necesidad de licencias.
Bajo costo (como ya se había mencionado)
Los canales de comunicaciones cambian de forma automática cuando se presenta ruido en la
señal de comunicaciones.
Cifrado AES de 128 bits que provee conexiones seguras de la red en la que se encuentren los
dispositivos conectados a ZigBee.
Es un protocolo de comunicación multi-salto, es decir, que se puede establecer comunicación entre
dos nodos aun cuando estos se encuentren fuera del rango de transmisión, siempre y cuando
existan otros nodos intermedios que los interconecten, de esta manera, se incrementa el área de
cobertura de la red.
Figura 24. Módulo de comunicación Xbee [30].
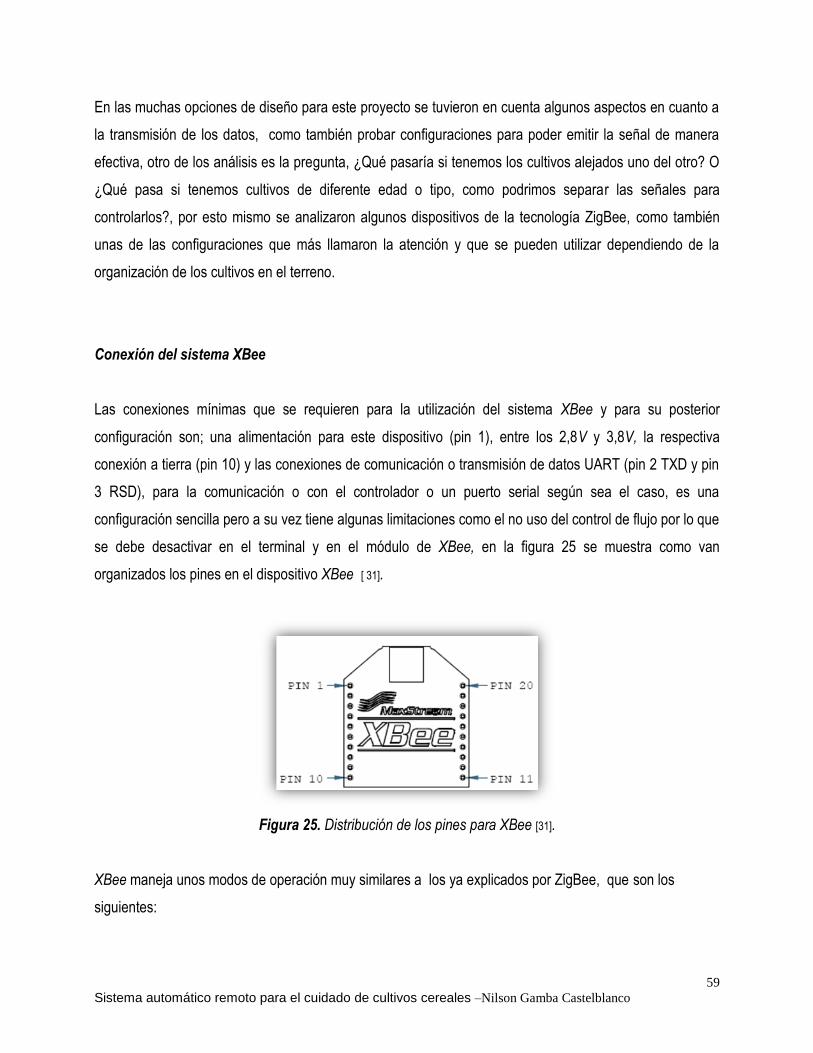
59
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
En las muchas opciones de diseño para este proyecto se tuvieron en cuenta algunos aspectos en cuanto a
la transmisión de los datos, como también probar configuraciones para poder emitir la señal de manera
efectiva, otro de los análisis es la pregunta, ¿Qué pasaría si tenemos los cultivos alejados uno del otro? O
¿Qué pasa si tenemos cultivos de diferente edad o tipo, como podrimos separar las señales para
controlarlos?, por esto mismo se analizaron algunos dispositivos de la tecnología ZigBee, como también
unas de las configuraciones que más llamaron la atención y que se pueden utilizar dependiendo de la
organización de los cultivos en el terreno.
Conexión del sistema XBee
Las conexiones mínimas que se requieren para la utilización del sistema XBee y para su posterior
configuración son; una alimentación para este dispositivo (pin 1), entre los 2,8V y 3,8V, la respectiva
conexión a tierra (pin 10) y las conexiones de comunicación o transmisión de datos UART (pin 2 TXD y pin
3 RSD), para la comunicación o con el controlador o un puerto serial según sea el caso, es una
configuración sencilla pero a su vez tiene algunas limitaciones como el no uso del control de flujo por lo que
se debe desactivar en el terminal y en el módulo de XBee, en la figura 25 se muestra como van
organizados los pines en el dispositivo XBee [ 31].
Figura 25. Distribución de los pines para XBee [31].
XBee maneja unos modos de operación muy similares a los ya explicados por ZigBee, que son los
siguientes:
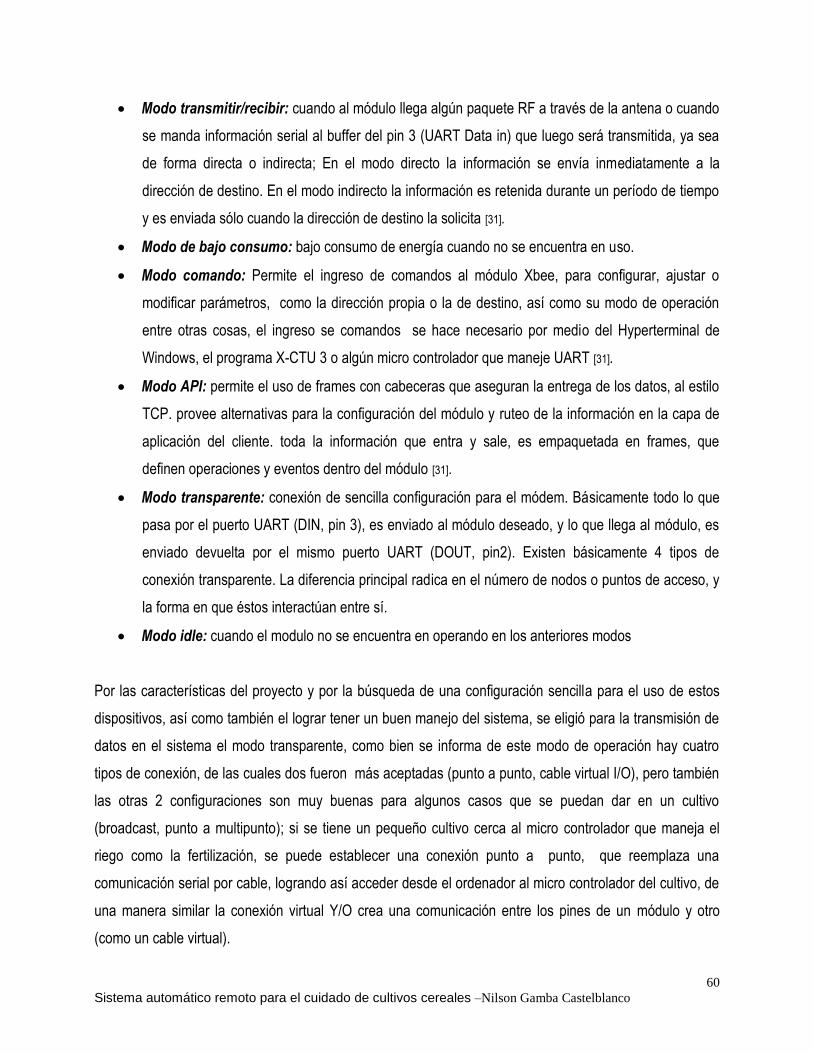
60
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Modo transmitir/recibir: cuando al módulo llega algún paquete RF a través de la antena o cuando
se manda información serial al buffer del pin 3 (UART Data in) que luego será transmitida, ya sea
de forma directa o indirecta; En el modo directo la información se envía inmediatamente a la
dirección de destino. En el modo indirecto la información es retenida durante un período de tiempo
y es enviada sólo cuando la dirección de destino la solicita [31].
Modo de bajo consumo: bajo consumo de energía cuando no se encuentra en uso.
Modo comando: Permite el ingreso de comandos al módulo Xbee, para configurar, ajustar o
modificar parámetros, como la dirección propia o la de destino, así como su modo de operación
entre otras cosas, el ingreso se comandos se hace necesario por medio del Hyperterminal de
Windows, el programa X-CTU 3 o algún micro controlador que maneje UART [31].
Modo API: permite el uso de frames con cabeceras que aseguran la entrega de los datos, al estilo
TCP. provee alternativas para la configuración del módulo y ruteo de la información en la capa de
aplicación del cliente. toda la información que entra y sale, es empaquetada en frames, que
definen operaciones y eventos dentro del módulo [31].
Modo transparente: conexión de sencilla configuración para el módem. Básicamente todo lo que
pasa por el puerto UART (DIN, pin 3), es enviado al módulo deseado, y lo que llega al módulo, es
enviado devuelta por el mismo puerto UART (DOUT, pin2). Existen básicamente 4 tipos de
conexión transparente. La diferencia principal radica en el número de nodos o puntos de acceso, y
la forma en que éstos interactúan entre sí.
Modo idle: cuando el modulo no se encuentra en operando en los anteriores modos
Por las características del proyecto y por la búsqueda de una configuración sencilla para el uso de estos
dispositivos, así como también el lograr tener un buen manejo del sistema, se eligió para la transmisión de
datos en el sistema el modo transparente, como bien se informa de este modo de operación hay cuatro
tipos de conexión, de las cuales dos fueron más aceptadas (punto a punto, cable virtual I/O), pero también
las otras 2 configuraciones son muy buenas para algunos casos que se puedan dar en un cultivo
(broadcast, punto a multipunto); si se tiene un pequeño cultivo cerca al micro controlador que maneja el
riego como la fertilización, se puede establecer una conexión punto a punto, que reemplaza una
comunicación serial por cable, logrando así acceder desde el ordenador al micro controlador del cultivo, de
una manera similar la conexión virtual Y/O crea una comunicación entre los pines de un módulo y otro
(como un cable virtual).
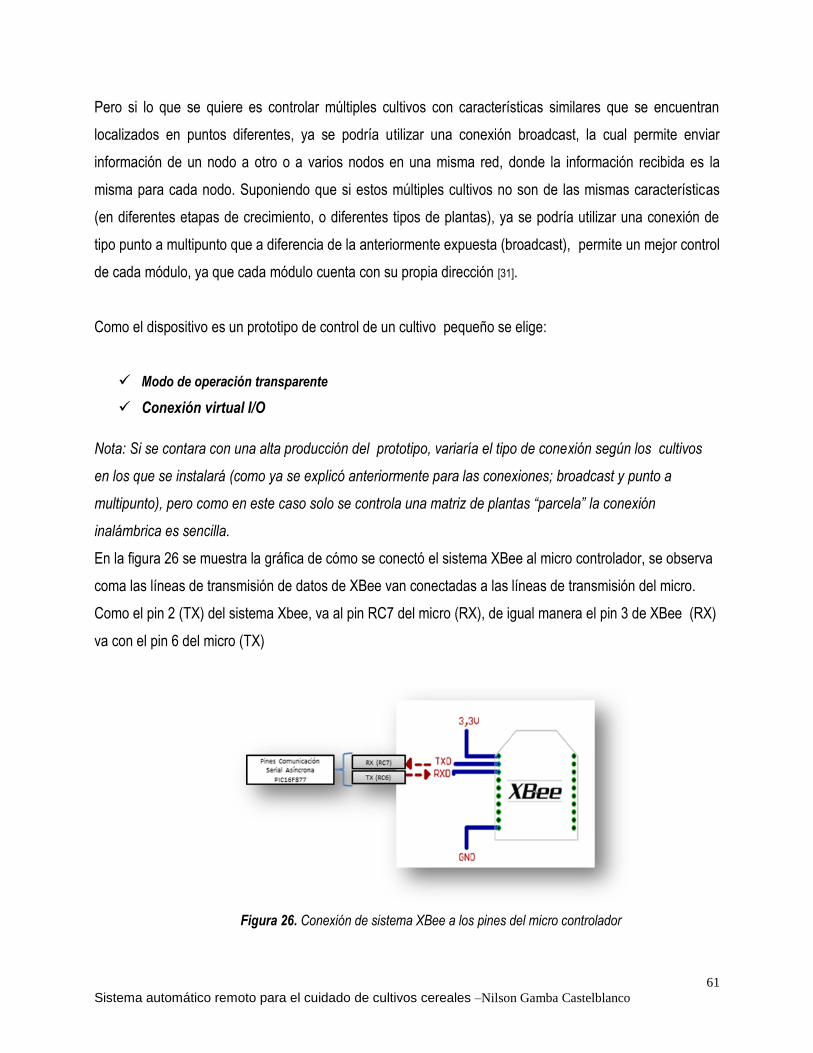
61
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Pero si lo que se quiere es controlar múltiples cultivos con características similares que se encuentran
localizados en puntos diferentes, ya se podría utilizar una conexión broadcast, la cual permite enviar
información de un nodo a otro o a varios nodos en una misma red, donde la información recibida es la
misma para cada nodo. Suponiendo que si estos múltiples cultivos no son de las mismas características
(en diferentes etapas de crecimiento, o diferentes tipos de plantas), ya se podría utilizar una conexión de
tipo punto a multipunto que a diferencia de la anteriormente expuesta (broadcast), permite un mejor control
de cada módulo, ya que cada módulo cuenta con su propia dirección [31].
Como el dispositivo es un prototipo de control de un cultivo pequeño se elige:
Modo de operación transparente
Conexión virtual I/O
Nota: Si se contara con una alta producción del prototipo, variaría el tipo de conexión según los cultivos
en los que se instalará (como ya se explicó anteriormente para las conexiones; broadcast y punto a
multipunto), pero como en este caso solo se controla una matriz de plantas “parcela” la conexión
inalámbrica es sencilla.
En la figura 26 se muestra la gráfica de cómo se conectó el sistema XBee al micro controlador, se observa
coma las líneas de transmisión de datos de XBee van conectadas a las líneas de transmisión del micro.
Como el pin 2 (TX) del sistema Xbee, va al pin RC7 del micro (RX), de igual manera el pin 3 de XBee (RX)
va con el pin 6 del micro (TX)
Figura 26. Conexión de sistema XBee a los pines del micro controlador
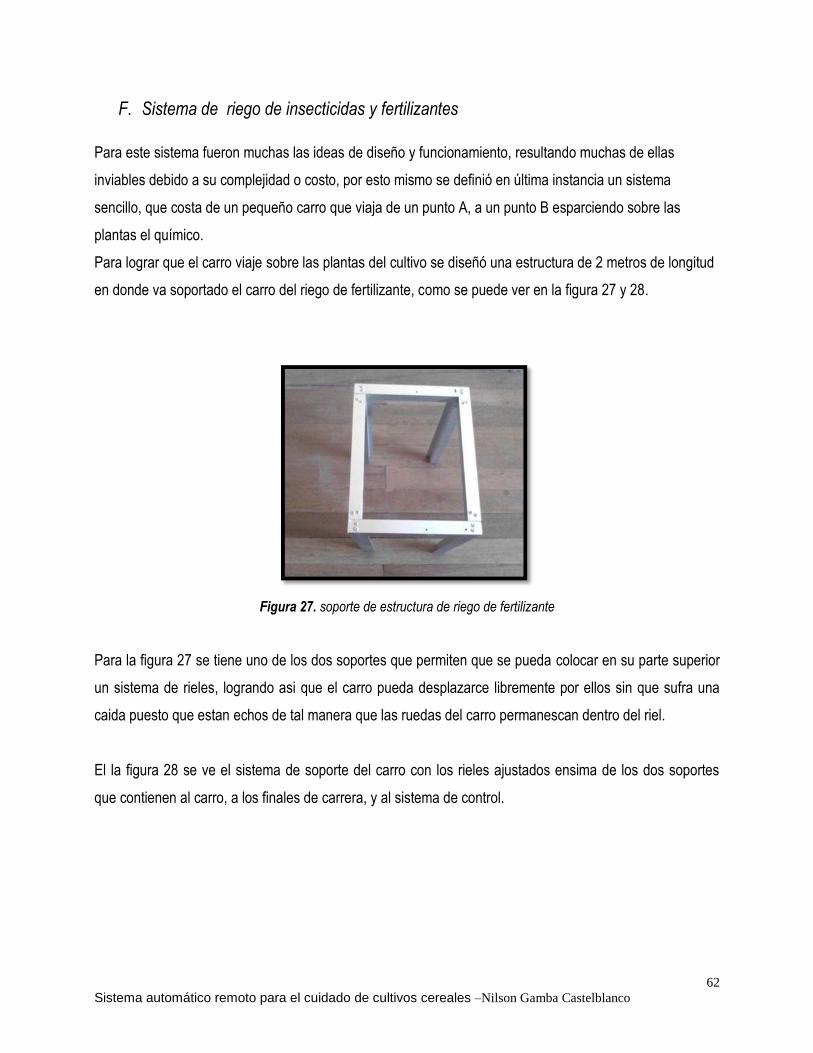
62
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
F. Sistema de riego de insecticidas y fertilizantes
Para este sistema fueron muchas las ideas de diseño y funcionamiento, resultando muchas de ellas
inviables debido a su complejidad o costo, por esto mismo se definió en última instancia un sistema
sencillo, que costa de un pequeño carro que viaja de un punto A, a un punto B esparciendo sobre las
plantas el químico.
Para lograr que el carro viaje sobre las plantas del cultivo se diseñó una estructura de 2 metros de longitud
en donde va soportado el carro del riego de fertilizante, como se puede ver en la figura 27 y 28.
Figura 27. soporte de estructura de riego de fertilizante
Para la figura 27 se tiene uno de los dos soportes que permiten que se pueda colocar en su parte superior
un sistema de rieles, logrando asi que el carro pueda desplazarce libremente por ellos sin que sufra una
caida puesto que estan echos de tal manera que las ruedas del carro permanescan dentro del riel.
El la figura 28 se ve el sistema de soporte del carro con los rieles ajustados ensima de los dos soportes
que contienen al carro, a los finales de carrera, y al sistema de control.
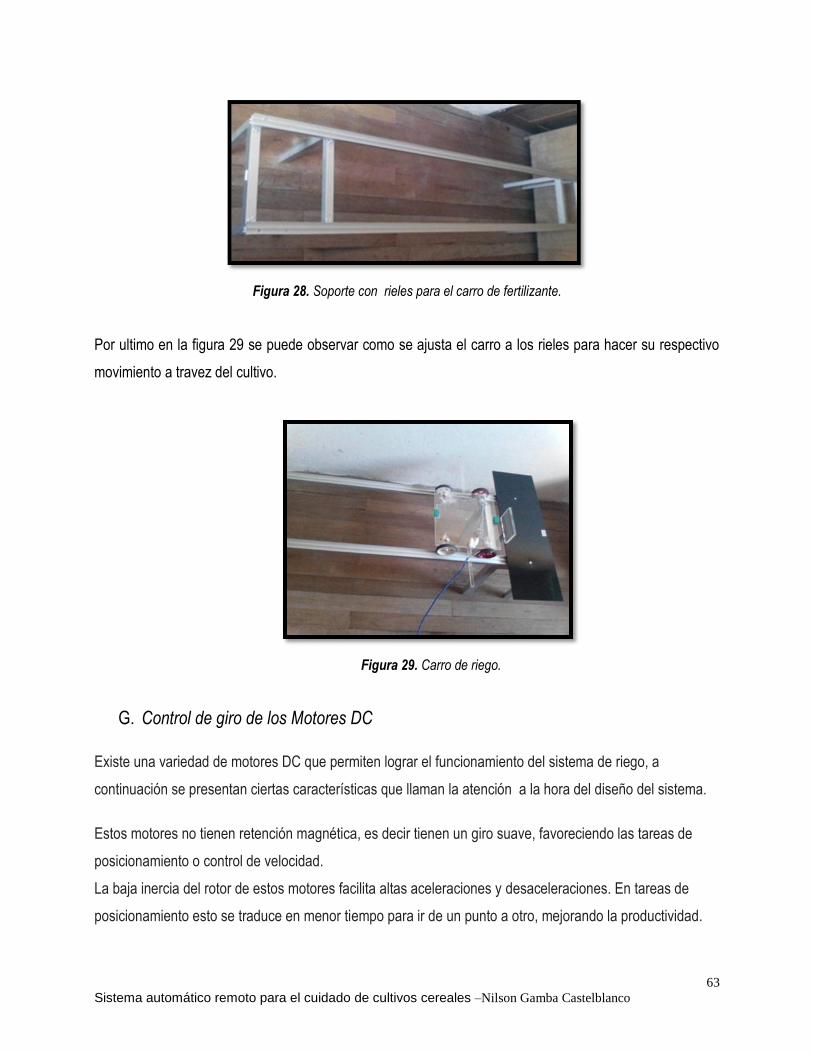
63
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 28. Soporte con rieles para el carro de fertilizante.
Por ultimo en la figura 29 se puede observar como se ajusta el carro a los rieles para hacer su respectivo
movimiento a travez del cultivo.
Figura 29. Carro de riego.
G. Control de giro de los Motores DC
Existe una variedad de motores DC que permiten lograr el funcionamiento del sistema de riego, a
continuación se presentan ciertas características que llaman la atención a la hora del diseño del sistema.
Estos motores no tienen retención magnética, es decir tienen un giro suave, favoreciendo las tareas de
posicionamiento o control de velocidad.
La baja inercia del rotor de estos motores facilita altas aceleraciones y desaceleraciones. En tareas de
posicionamiento esto se traduce en menor tiempo para ir de un punto a otro, mejorando la productividad.
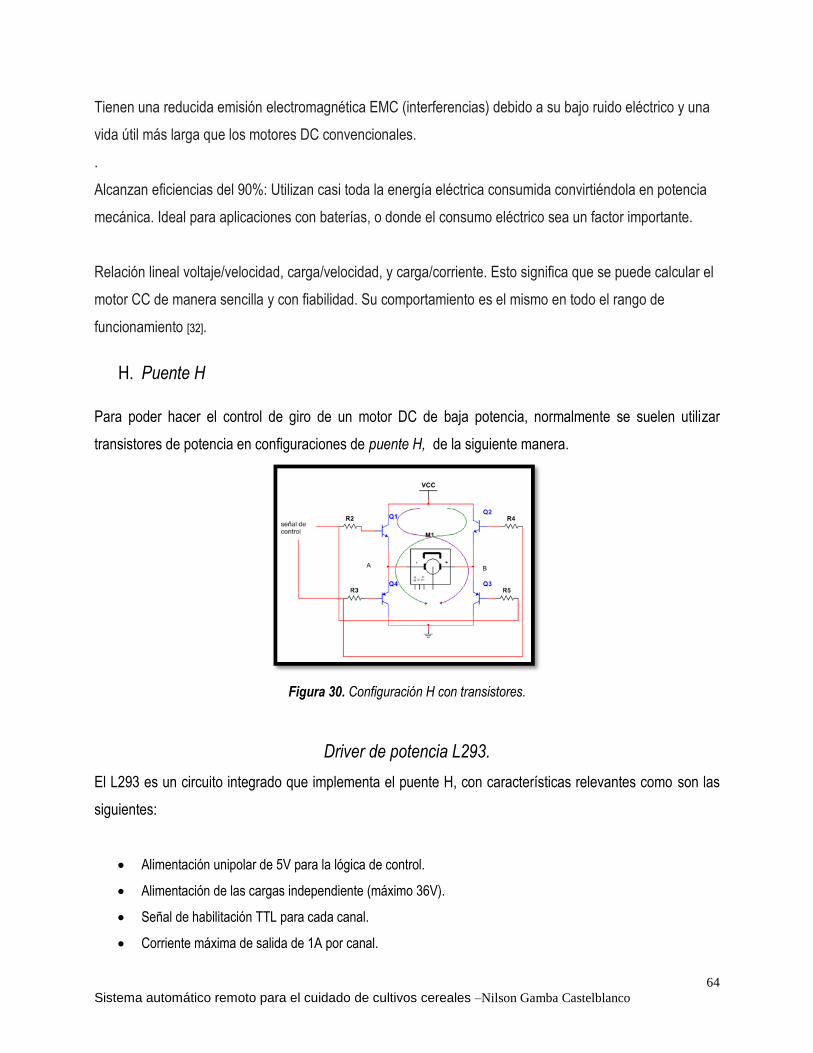
64
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tienen una reducida emisión electromagnética EMC (interferencias) debido a su bajo ruido eléctrico y una
vida útil más larga que los motores DC convencionales.
.
Alcanzan eficiencias del 90%: Utilizan casi toda la energía eléctrica consumida convirtiéndola en potencia
mecánica. Ideal para aplicaciones con baterías, o donde el consumo eléctrico sea un factor importante.
Relación lineal voltaje/velocidad, carga/velocidad, y carga/corriente. Esto significa que se puede calcular el
motor CC de manera sencilla y con fiabilidad. Su comportamiento es el mismo en todo el rango de
funcionamiento [32].
H. Puente H
Para poder hacer el control de giro de un motor DC de baja potencia, normalmente se suelen utilizar
transistores de potencia en configuraciones de puente H, de la siguiente manera.
Figura 30. Configuración H con transistores.
Driver de potencia L293.
El L293 es un circuito integrado que implementa el puente H, con características relevantes como son las
siguientes:
Alimentación unipolar de 5V para la lógica de control.
Alimentación de las cargas independiente (máximo 36V).
Señal de habilitación TTL para cada canal.
Corriente máxima de salida de 1A por canal.
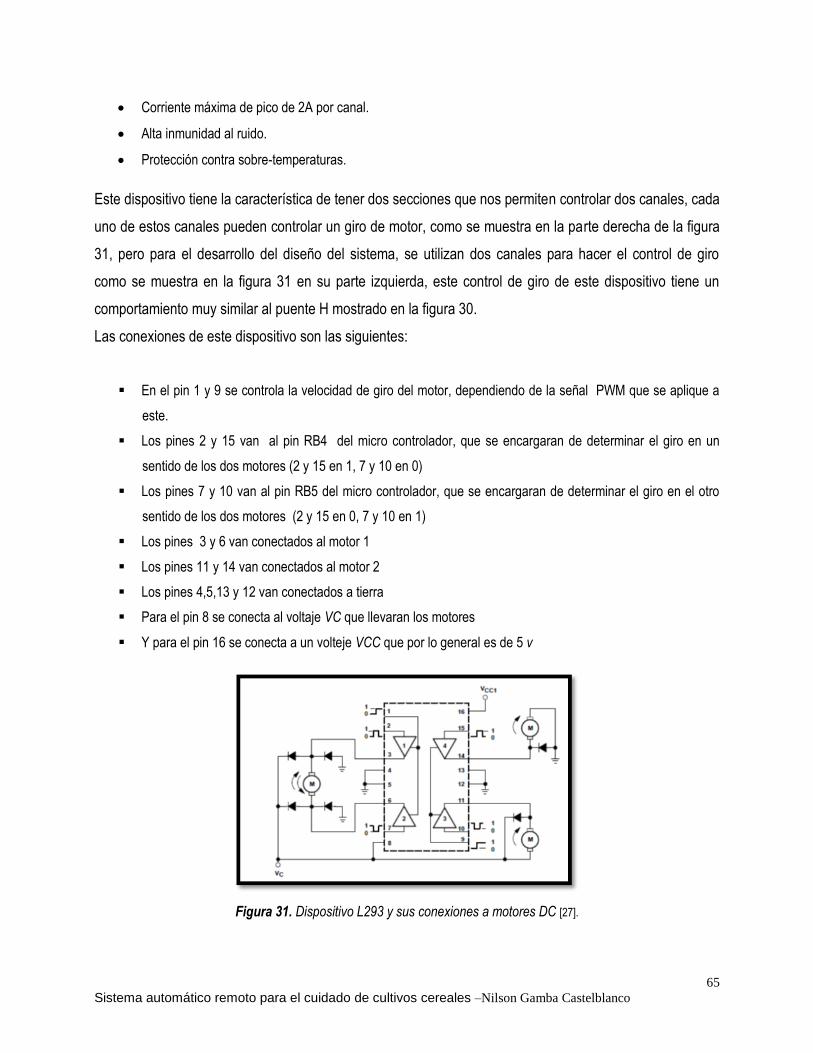
65
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Corriente máxima de pico de 2A por canal.
Alta inmunidad al ruido.
Protección contra sobre-temperaturas.
Este dispositivo tiene la característica de tener dos secciones que nos permiten controlar dos canales, cada
uno de estos canales pueden controlar un giro de motor, como se muestra en la parte derecha de la figura
31, pero para el desarrollo del diseño del sistema, se utilizan dos canales para hacer el control de giro
como se muestra en la figura 31 en su parte izquierda, este control de giro de este dispositivo tiene un
comportamiento muy similar al puente H mostrado en la figura 30.
Las conexiones de este dispositivo son las siguientes:
En el pin 1 y 9 se controla la velocidad de giro del motor, dependiendo de la señal PWM que se aplique a
este.
Los pines 2 y 15 van al pin RB4 del micro controlador, que se encargaran de determinar el giro en un
sentido de los dos motores (2 y 15 en 1, 7 y 10 en 0)
Los pines 7 y 10 van al pin RB5 del micro controlador, que se encargaran de determinar el giro en el otro
sentido de los dos motores (2 y 15 en 0, 7 y 10 en 1)
Los pines 3 y 6 van conectados al motor 1
Los pines 11 y 14 van conectados al motor 2
Los pines 4,5,13 y 12 van conectados a tierra
Para el pin 8 se conecta al voltaje VC que llevaran los motores
Y para el pin 16 se conecta a un volteje VCC que por lo general es de 5 v
Figura 31. Dispositivo L293 y sus conexiones a motores DC [27].
66
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Nota: los diodos que se muestran en la figura 31, son diodos que evitan la aparición de picos de tenciones
procedentes de las bobinas de los mores y que pueden ocasionar el daño de los transistores o dispositivos
con los que se armen el puente H. Para el dispositivo L293 estos diodos están integrados internamente.
Para el funcionamiento de los 2 motores que controlan el movimiento del sistema de riego de fertilizante,
tenemos las siguientes señales que llegan a cada uno de los pines del dispositivo L293 en la tabla 13
Entrada Funcionamiento a
la salida
Pines 1 y 9 Pines 2 y 15 pines 7 y 10
A A B Giro a la izquierda
A B A Giro a la derecha
A A A Parada de motor
A B B Parada de motor
B X X Parada de motor
A = alto B=bajo X = no importa
Tabla 13. Señales de entrada L293
I. Finales de carrera
Los finales de carrera van controlados por el micro controlador en los pines RB1 y RB2 respectivamente,
esto con el fin de saber dónde está localizado el carro que se encarga de mover el tubo de riego de
fertilizante, puesto que para que dé comienzo el movimiento del carro tiene que estar este mismo activando
el fin de carrera 1, como en un estado de inicio. De igual manera estos fines de carrera permiten controlar
la cantidad de ciclos, y el espacio de riego de fertilizante, así como el cambio de giro de los motores.
J. Interfaz de Usuario
Para este proyecto se define una interfaz de usuario sencilla para que el usuario del proyecto tenga una
relación de comodidad y conformidad con el producto logrando así que cualquier persona pueda entender
el funcionamiento de la herramienta de manera rápida.
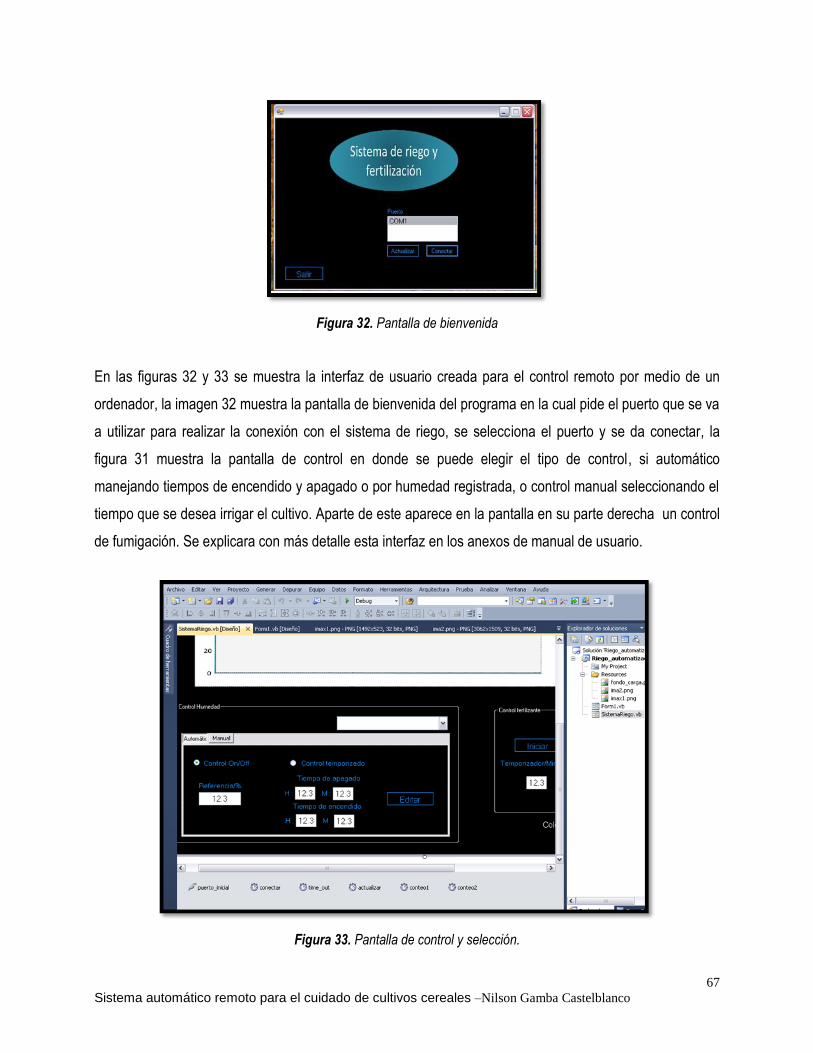
67
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 32. Pantalla de bienvenida
En las figuras 32 y 33 se muestra la interfaz de usuario creada para el control remoto por medio de un
ordenador, la imagen 32 muestra la pantalla de bienvenida del programa en la cual pide el puerto que se va
a utilizar para realizar la conexión con el sistema de riego, se selecciona el puerto y se da conectar, la
figura 31 muestra la pantalla de control en donde se puede elegir el tipo de control, si automático
manejando tiempos de encendido y apagado o por humedad registrada, o control manual seleccionando el
tiempo que se desea irrigar el cultivo. Aparte de este aparece en la pantalla en su parte derecha un control
de fumigación. Se explicara con más detalle esta interfaz en los anexos de manual de usuario.
Figura 33. Pantalla de control y selección.

68
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
5 RESULTADOS Y DISCUSIÓN
5.1 Implementación en Campo
5.1.1 Instalación de mangueras principales y secundarias para el riego
Se decide instalar el sistema de riego por goteo a altura, colocando estacas con arquetas para sostener la
manguera que dejara pasar el agua para el riego en los surcos a controlar por el sistema, tal y como se
muestra en las figuras 34 y 35, y se asegura la manguera de riego con alambre dulce delgado.
.
Figura 34. Instalación de mangera de riego por goteo por altura (20cm)
Figura 35. Sistema instalado para los surcos automatizados de frijol y arveja
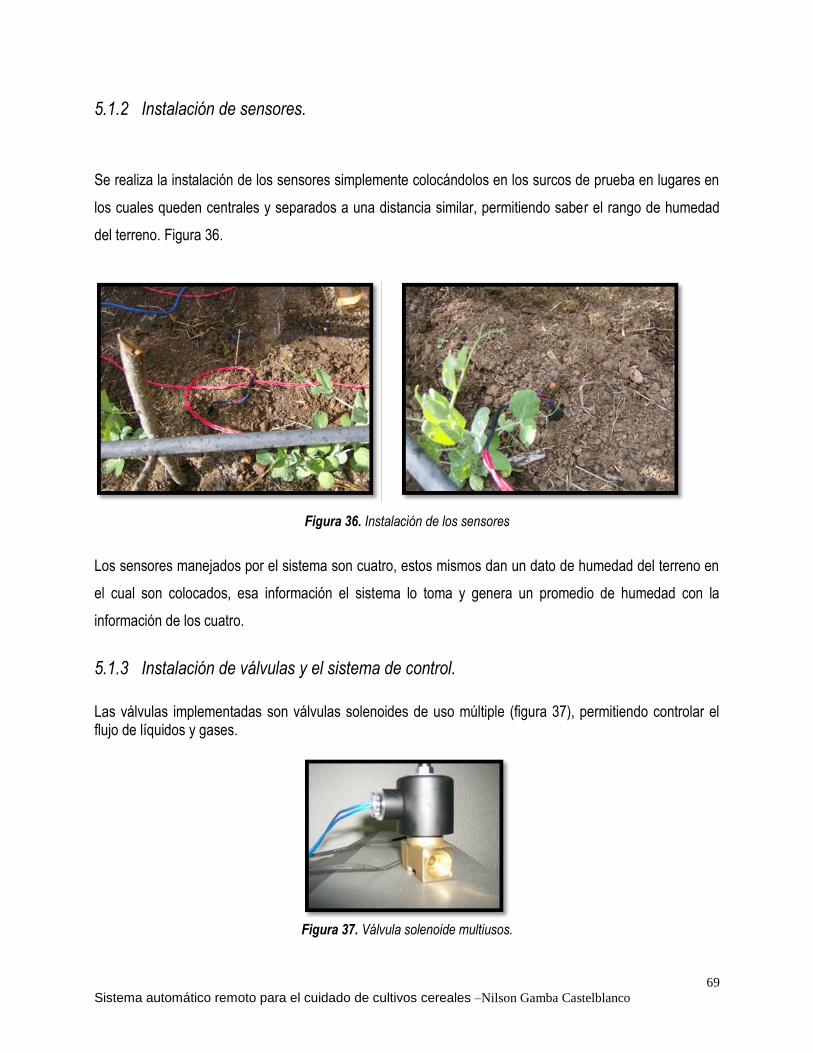
69
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
5.1.2 Instalación de sensores.
Se realiza la instalación de los sensores simplemente colocándolos en los surcos de prueba en lugares en
los cuales queden centrales y separados a una distancia similar, permitiendo saber el rango de humedad
del terreno. Figura 36.
Figura 36. Instalación de los sensores
Los sensores manejados por el sistema son cuatro, estos mismos dan un dato de humedad del terreno en
el cual son colocados, esa información el sistema lo toma y genera un promedio de humedad con la
información de los cuatro.
5.1.3 Instalación de válvulas y el sistema de control.
Las válvulas implementadas son válvulas solenoides de uso múltiple (figura 37), permitiendo controlar el flujo de líquidos y gases.
Figura 37. Válvula solenoide multiusos.
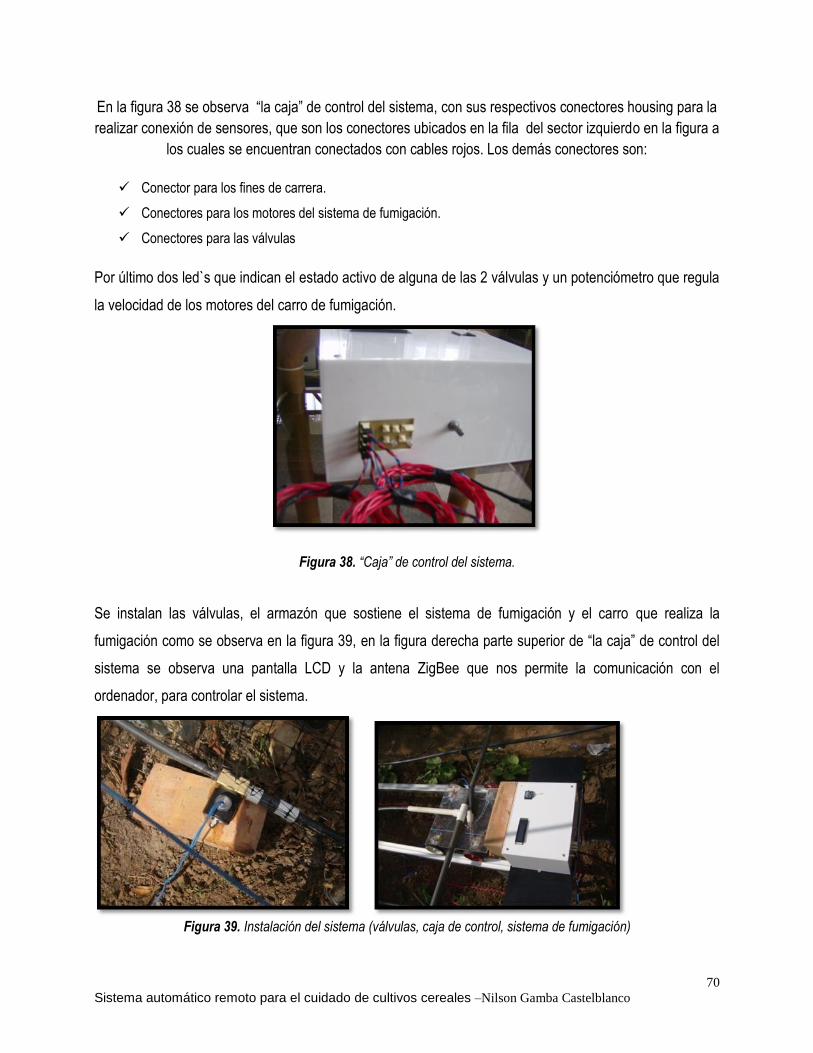
70
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
En la figura 38 se observa “la caja” de control del sistema, con sus respectivos conectores housing para la
realizar conexión de sensores, que son los conectores ubicados en la fila del sector izquierdo en la figura a
los cuales se encuentran conectados con cables rojos. Los demás conectores son:
Conector para los fines de carrera.
Conectores para los motores del sistema de fumigación.
Conectores para las válvulas
Por último dos led`s que indican el estado activo de alguna de las 2 válvulas y un potenciómetro que regula
la velocidad de los motores del carro de fumigación.
Figura 38. “Caja” de control del sistema.
Se instalan las válvulas, el armazón que sostiene el sistema de fumigación y el carro que realiza la
fumigación como se observa en la figura 39, en la figura derecha parte superior de “la caja” de control del
sistema se observa una pantalla LCD y la antena ZigBee que nos permite la comunicación con el
ordenador, para controlar el sistema.
Figura 39. Instalación del sistema (válvulas, caja de control, sistema de fumigación)
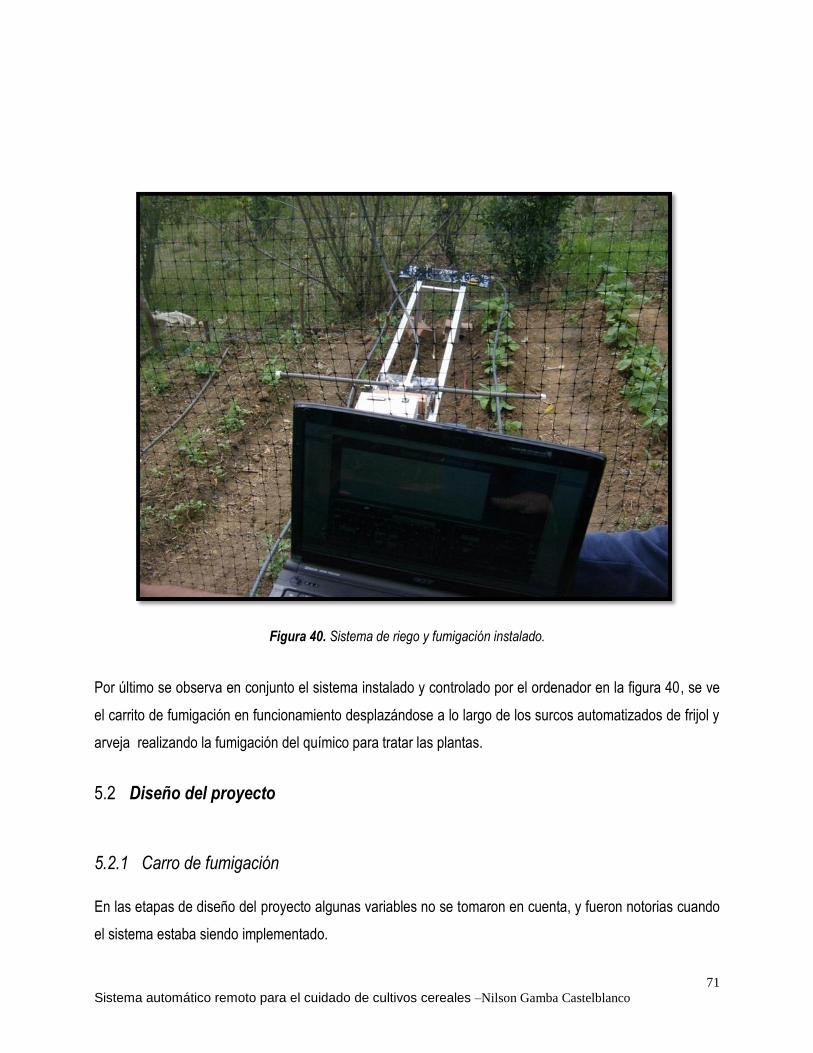
71
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Figura 40. Sistema de riego y fumigación instalado.
Por último se observa en conjunto el sistema instalado y controlado por el ordenador en la figura 40, se ve
el carrito de fumigación en funcionamiento desplazándose a lo largo de los surcos automatizados de frijol y
arveja realizando la fumigación del químico para tratar las plantas.
5.2 Diseño del proyecto
5.2.1 Carro de fumigación
En las etapas de diseño del proyecto algunas variables no se tomaron en cuenta, y fueron notorias cuando
el sistema estaba siendo implementado.
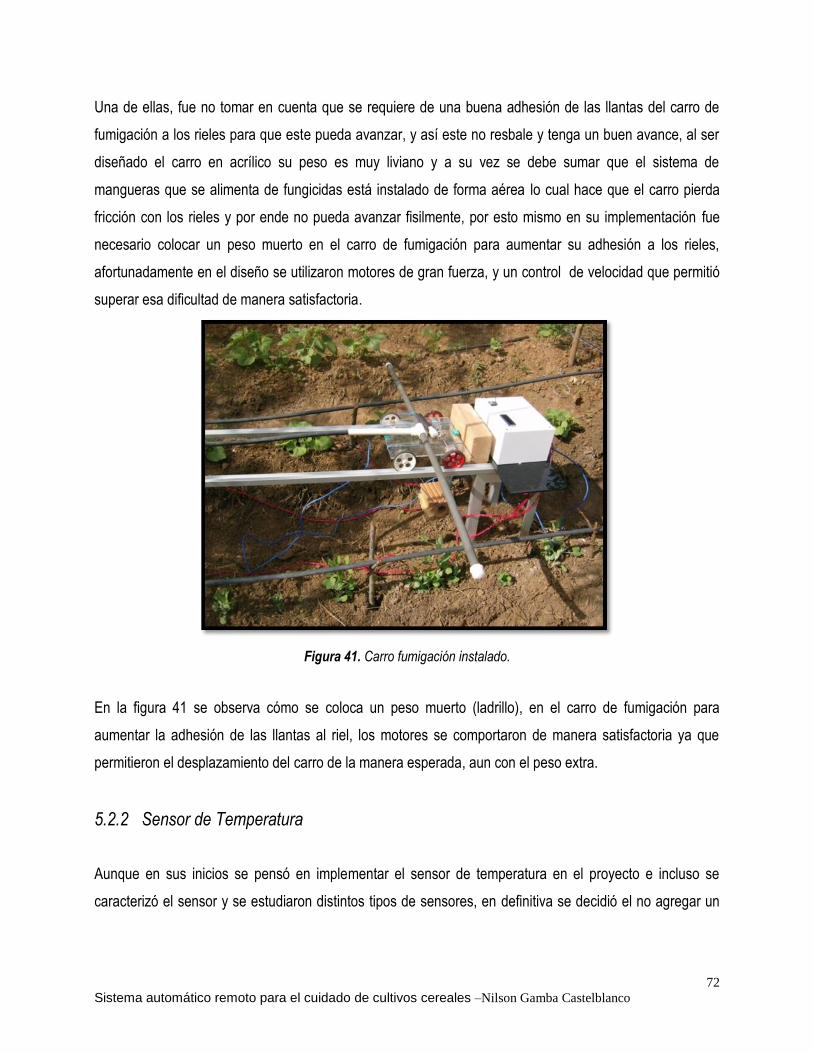
72
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Una de ellas, fue no tomar en cuenta que se requiere de una buena adhesión de las llantas del carro de
fumigación a los rieles para que este pueda avanzar, y así este no resbale y tenga un buen avance, al ser
diseñado el carro en acrílico su peso es muy liviano y a su vez se debe sumar que el sistema de
mangueras que se alimenta de fungicidas está instalado de forma aérea lo cual hace que el carro pierda
fricción con los rieles y por ende no pueda avanzar fisilmente, por esto mismo en su implementación fue
necesario colocar un peso muerto en el carro de fumigación para aumentar su adhesión a los rieles,
afortunadamente en el diseño se utilizaron motores de gran fuerza, y un control de velocidad que permitió
superar esa dificultad de manera satisfactoria.
Figura 41. Carro fumigación instalado.
En la figura 41 se observa cómo se coloca un peso muerto (ladrillo), en el carro de fumigación para
aumentar la adhesión de las llantas al riel, los motores se comportaron de manera satisfactoria ya que
permitieron el desplazamiento del carro de la manera esperada, aun con el peso extra.
5.2.2 Sensor de Temperatura
Aunque en sus inicios se pensó en implementar el sensor de temperatura en el proyecto e incluso se
caracterizó el sensor y se estudiaron distintos tipos de sensores, en definitiva se decidió el no agregar un
73
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
sensor de temperatura al sistema para reducir costos ya que en grado de importancia y consultando a los
cultivadores, se definió que no ameritaba su uso.
Figura 42. Sensor de temperatura LM 35
5.2.3 Siembra del cultivo
En cuanto a la siembra del cultivo hubo inconvenientes ya que por factores externos las semillas del surco
de frijol automatizado fueron comidas por algunas aves, y se realizó el re-sembrado, dando como resultado
un atraso en las pruebas del cultivo de alrededor de cuatro días, por esto mismo se evidencia una
germinación más temprana de las plantas sembradas en los surcos controles, que no se vieron afectados.
Figura 43. segunda semana.
Cultivo automatizado (izquierda) VS cultivo control (derecha)
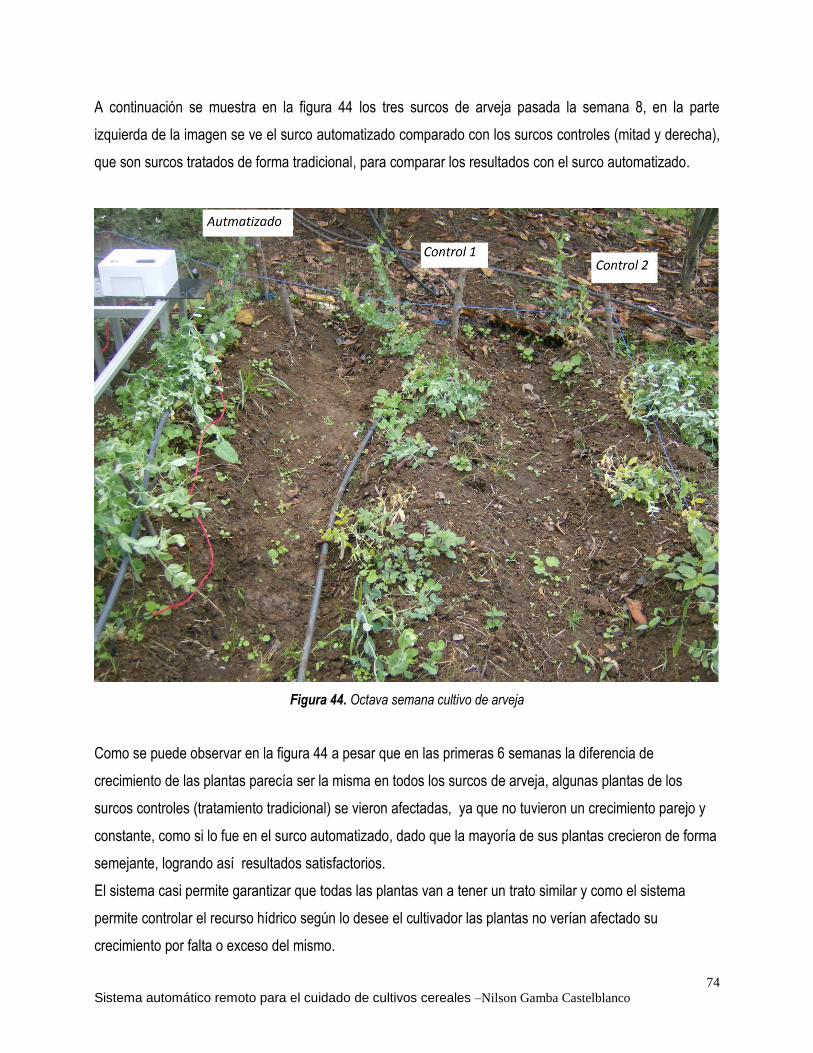
74
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
A continuación se muestra en la figura 44 los tres surcos de arveja pasada la semana 8, en la parte
izquierda de la imagen se ve el surco automatizado comparado con los surcos controles (mitad y derecha),
que son surcos tratados de forma tradicional, para comparar los resultados con el surco automatizado.
Figura 44. Octava semana cultivo de arveja
Como se puede observar en la figura 44 a pesar que en las primeras 6 semanas la diferencia de
crecimiento de las plantas parecía ser la misma en todos los surcos de arveja, algunas plantas de los
surcos controles (tratamiento tradicional) se vieron afectadas, ya que no tuvieron un crecimiento parejo y
constante, como si lo fue en el surco automatizado, dado que la mayoría de sus plantas crecieron de forma
semejante, logrando así resultados satisfactorios.
El sistema casi permite garantizar que todas las plantas van a tener un trato similar y como el sistema
permite controlar el recurso hídrico según lo desee el cultivador las plantas no verían afectado su
crecimiento por falta o exceso del mismo.
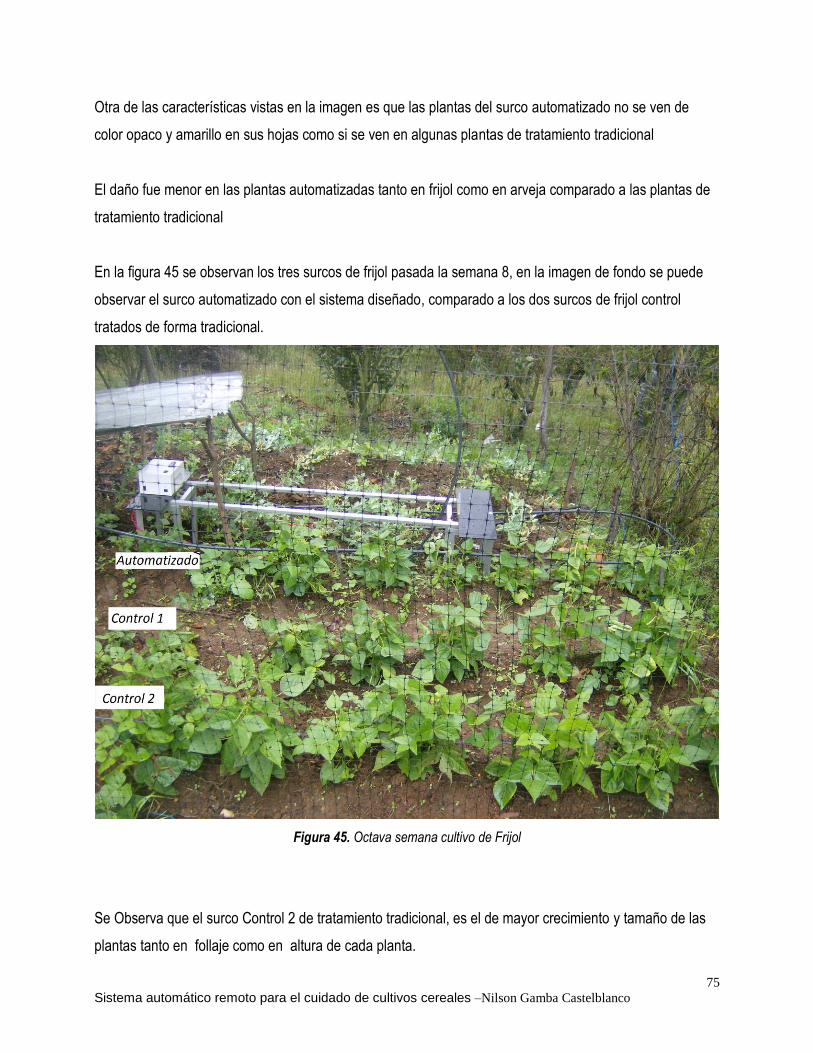
75
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Otra de las características vistas en la imagen es que las plantas del surco automatizado no se ven de
color opaco y amarillo en sus hojas como si se ven en algunas plantas de tratamiento tradicional
El daño fue menor en las plantas automatizadas tanto en frijol como en arveja comparado a las plantas de
tratamiento tradicional
En la figura 45 se observan los tres surcos de frijol pasada la semana 8, en la imagen de fondo se puede
observar el surco automatizado con el sistema diseñado, comparado a los dos surcos de frijol control
tratados de forma tradicional.
Figura 45. Octava semana cultivo de Frijol
Se Observa que el surco Control 2 de tratamiento tradicional, es el de mayor crecimiento y tamaño de las
plantas tanto en follaje como en altura de cada planta.
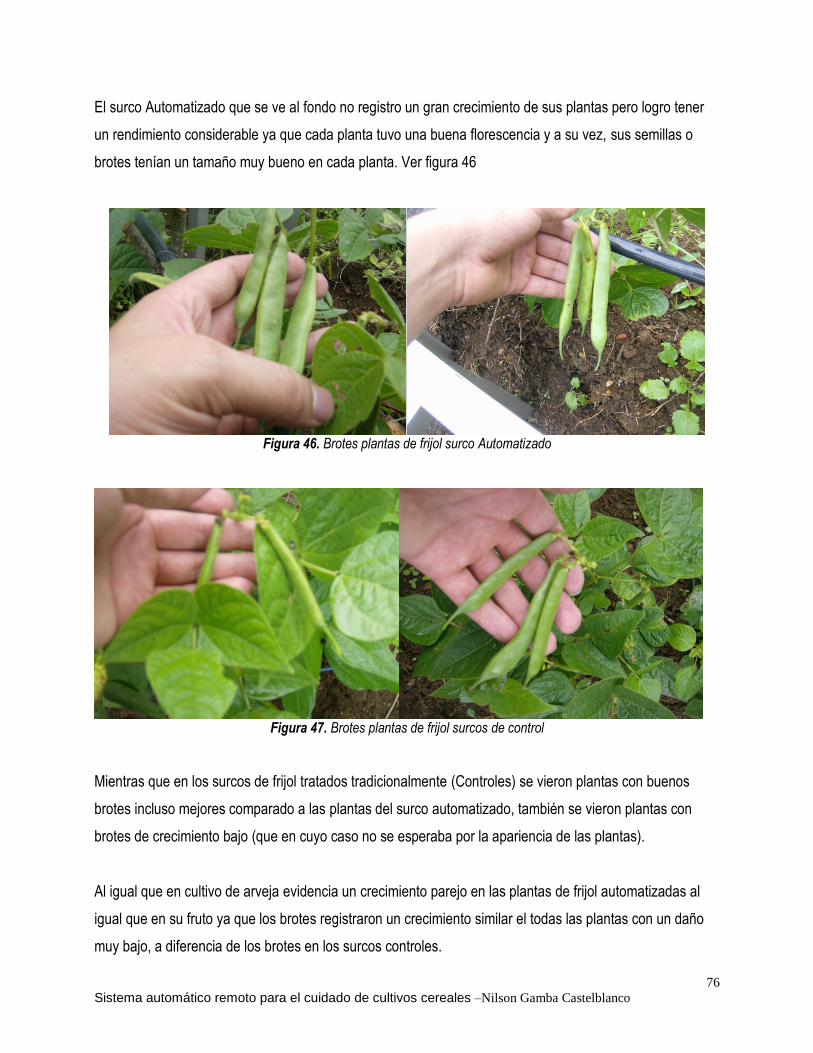
76
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
El surco Automatizado que se ve al fondo no registro un gran crecimiento de sus plantas pero logro tener
un rendimiento considerable ya que cada planta tuvo una buena florescencia y a su vez, sus semillas o
brotes tenían un tamaño muy bueno en cada planta. Ver figura 46
Figura 46. Brotes plantas de frijol surco Automatizado
Figura 47. Brotes plantas de frijol surcos de control
Mientras que en los surcos de frijol tratados tradicionalmente (Controles) se vieron plantas con buenos
brotes incluso mejores comparado a las plantas del surco automatizado, también se vieron plantas con
brotes de crecimiento bajo (que en cuyo caso no se esperaba por la apariencia de las plantas).
Al igual que en cultivo de arveja evidencia un crecimiento parejo en las plantas de frijol automatizadas al
igual que en su fruto ya que los brotes registraron un crecimiento similar el todas las plantas con un daño
muy bajo, a diferencia de los brotes en los surcos controles.
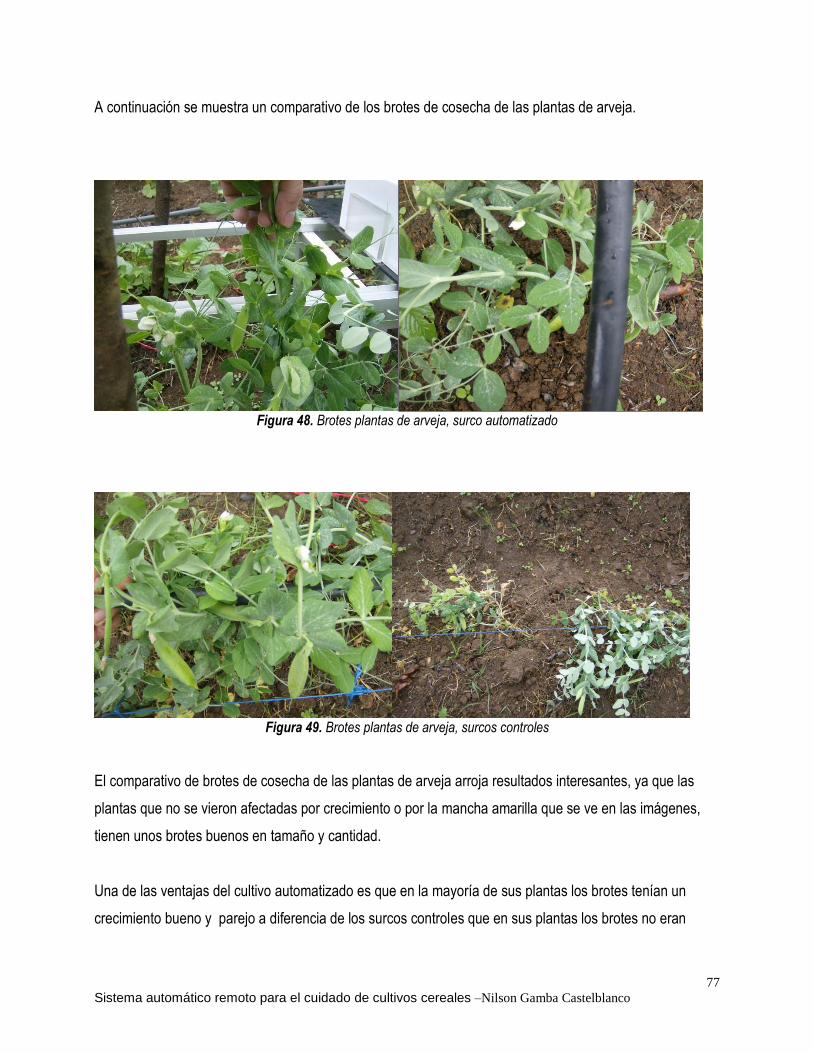
77
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
A continuación se muestra un comparativo de los brotes de cosecha de las plantas de arveja.
Figura 48. Brotes plantas de arveja, surco automatizado
Figura 49. Brotes plantas de arveja, surcos controles
El comparativo de brotes de cosecha de las plantas de arveja arroja resultados interesantes, ya que las
plantas que no se vieron afectadas por crecimiento o por la mancha amarilla que se ve en las imágenes,
tienen unos brotes buenos en tamaño y cantidad.
Una de las ventajas del cultivo automatizado es que en la mayoría de sus plantas los brotes tenían un
crecimiento bueno y parejo a diferencia de los surcos controles que en sus plantas los brotes no eran
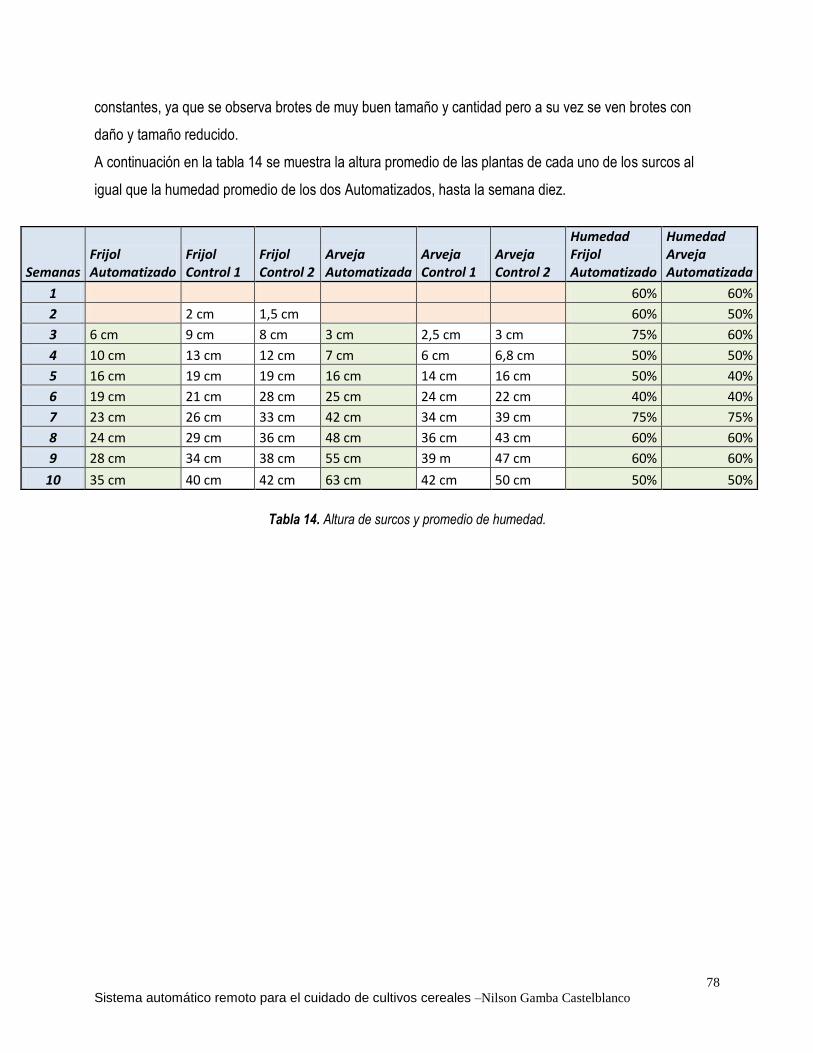
78
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
constantes, ya que se observa brotes de muy buen tamaño y cantidad pero a su vez se ven brotes con
daño y tamaño reducido.
A continuación en la tabla 14 se muestra la altura promedio de las plantas de cada uno de los surcos al
igual que la humedad promedio de los dos Automatizados, hasta la semana diez.
Semanas Frijol Automatizado
Frijol Control 1
Frijol Control 2
Arveja Automatizada
Arveja Control 1
Arveja Control 2
Humedad Frijol Automatizado
Humedad Arveja Automatizada
1 60% 60%
2 2 cm 1,5 cm 60% 50%
3 6 cm 9 cm 8 cm 3 cm 2,5 cm 3 cm 75% 60%
4 10 cm 13 cm 12 cm 7 cm 6 cm 6,8 cm 50% 50%
5 16 cm 19 cm 19 cm 16 cm 14 cm 16 cm 50% 40%
6 19 cm 21 cm 28 cm 25 cm 24 cm 22 cm 40% 40%
7 23 cm 26 cm 33 cm 42 cm 34 cm 39 cm 75% 75%
8 24 cm 29 cm 36 cm 48 cm 36 cm 43 cm 60% 60%
9 28 cm 34 cm 38 cm 55 cm 39 m 47 cm 60% 60%
10 35 cm 40 cm 42 cm 63 cm 42 cm 50 cm 50% 50%
Tabla 14. Altura de surcos y promedio de humedad.
79
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
6 ANALISIS DEL MERCADO
6.1 Detección de la necesidad
Existe la necesidad de mejorar los procesos y tratamientos de cultivos en el país y poder diseñar sistemas
económicos y de fácil utilización de manera tal que todas las comunidades puedan tener acceso a dichos
sistemas, con el fin de lograr esto se diseñó este sistema de tratamiento de cultivos cereales, para poder
aportar y suplir la necesidad de investigar en este campo.
Ya que los sistemas de riego automáticos actuales en el mercado son de un costo elevado además del
costo de instalación, importación, mantenimiento y cuidado se busca diseñar un sistema lo más económico
posible con una interfaz de usuario sencilla que permita al usuario tener varias opciones de control, de tal
manera que se pueda familiarizar con alguna, de igual manera que el sistema permita una instalación
sencilla usando materiales económicos y un sistema robusto que no requiera de mantenimientos costosos
y regulares.
En las etapas de diseño al igual que en las etapas de prueba se vio que le era más familiar al agricultor
utilizar el sistema por control de tiempos ya sea de la forma manual o de la forma automática controlando
ciclos de tiempo. Ya que por referencia de humedad se requiere de tiempo para ir conociendo cual es la
humedad ideal que el agricultor debería introducir al sistema.
6.2 Ofertas del mercado actual (competidores)
Se realizaron cotizaciones de sistemas de riego en Colombia y en latino América buscando sistemas que
suplieran necesidades de cuidado de cultivos, de tal modo sobresalen los siguientes.
La primera empresa es colombiana Irrigaciones limitada Bogotá Colombia. Cuyo precio y
descripción se encuentra en la tabla 15
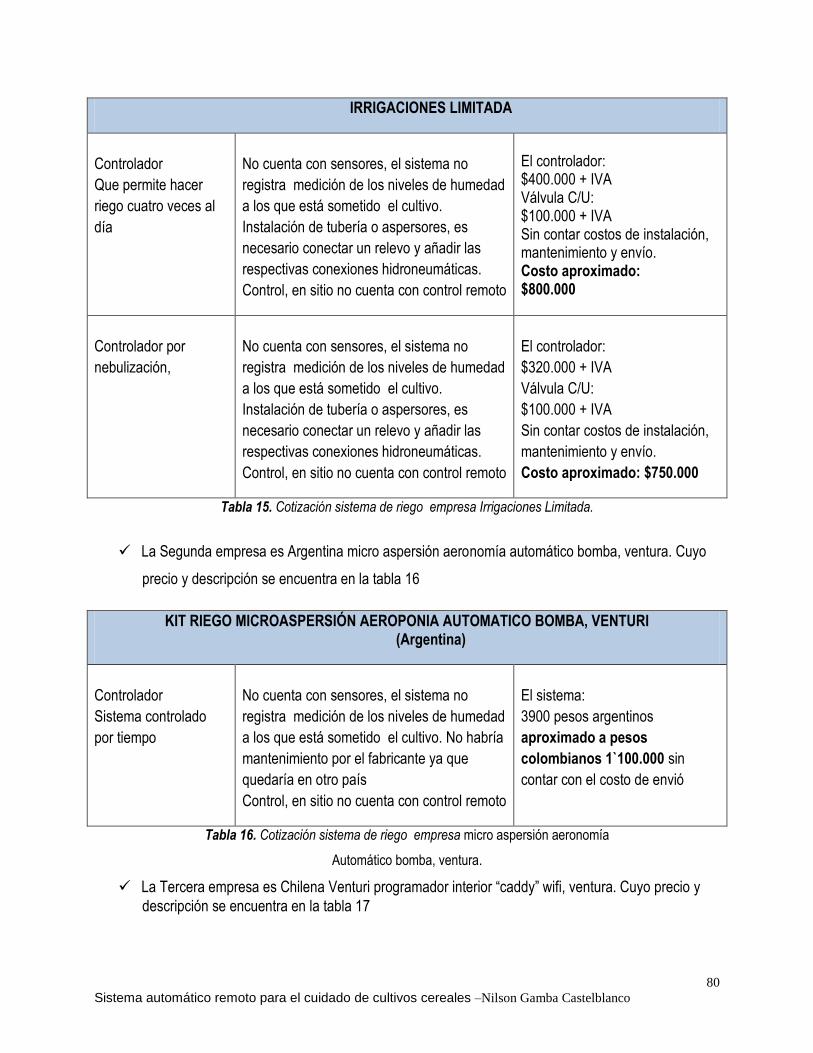
80
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
IRRIGACIONES LIMITADA
Controlador
Que permite hacer
riego cuatro veces al
día
No cuenta con sensores, el sistema no
registra medición de los niveles de humedad
a los que está sometido el cultivo.
Instalación de tubería o aspersores, es
necesario conectar un relevo y añadir las
respectivas conexiones hidroneumáticas.
Control, en sitio no cuenta con control remoto
El controlador: $400.000 + IVA Válvula C/U: $100.000 + IVA Sin contar costos de instalación, mantenimiento y envío. Costo aproximado: $800.000
Controlador por
nebulización,
No cuenta con sensores, el sistema no
registra medición de los niveles de humedad
a los que está sometido el cultivo.
Instalación de tubería o aspersores, es
necesario conectar un relevo y añadir las
respectivas conexiones hidroneumáticas.
Control, en sitio no cuenta con control remoto
El controlador:
$320.000 + IVA
Válvula C/U:
$100.000 + IVA
Sin contar costos de instalación,
mantenimiento y envío.
Costo aproximado: $750.000
Tabla 15. Cotización sistema de riego empresa Irrigaciones Limitada.
La Segunda empresa es Argentina micro aspersión aeronomía automático bomba, ventura. Cuyo
precio y descripción se encuentra en la tabla 16
KIT RIEGO MICROASPERSIÓN AEROPONIA AUTOMATICO BOMBA, VENTURI (Argentina)
Controlador
Sistema controlado
por tiempo
No cuenta con sensores, el sistema no
registra medición de los niveles de humedad
a los que está sometido el cultivo. No habría
mantenimiento por el fabricante ya que
quedaría en otro país
Control, en sitio no cuenta con control remoto
El sistema:
3900 pesos argentinos
aproximado a pesos
colombianos 1`100.000 sin
contar con el costo de envió
Tabla 16. Cotización sistema de riego empresa micro aspersión aeronomía
Automático bomba, ventura.
La Tercera empresa es Chilena Venturi programador interior “caddy” wifi, ventura. Cuyo precio y
descripción se encuentra en la tabla 17
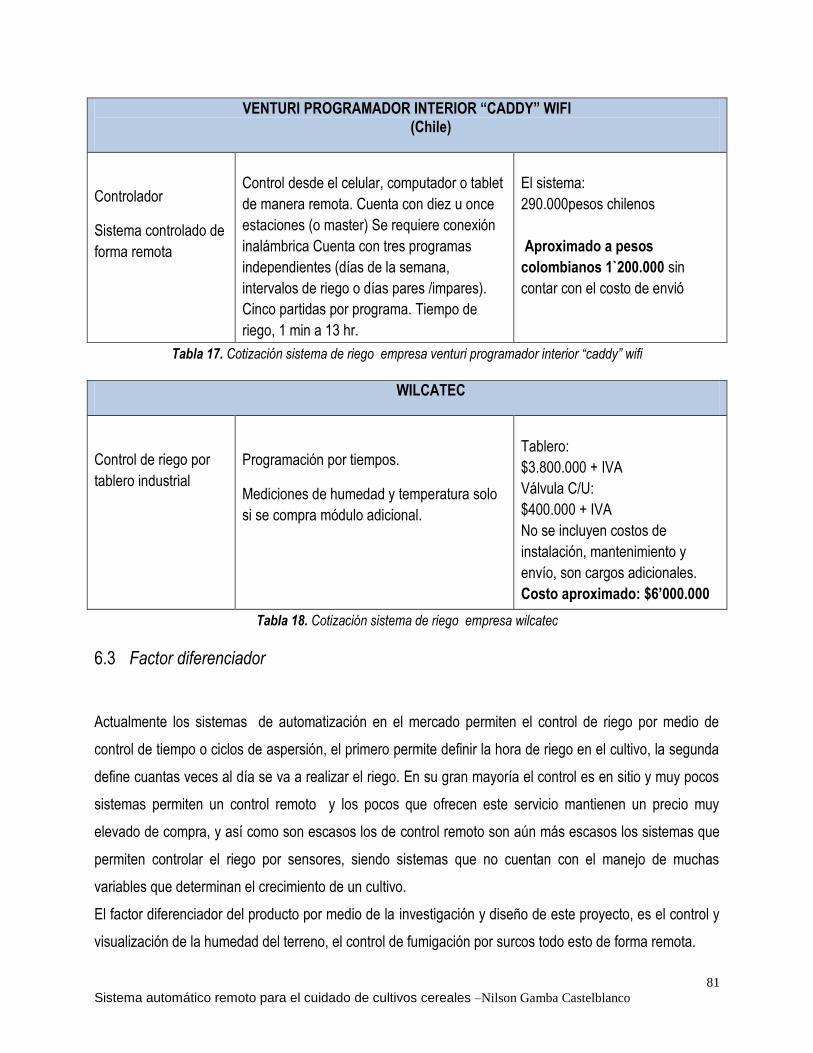
81
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
VENTURI PROGRAMADOR INTERIOR “CADDY” WIFI (Chile)
Controlador
Sistema controlado de
forma remota
Control desde el celular, computador o tablet
de manera remota. Cuenta con diez u once
estaciones (o master) Se requiere conexión
inalámbrica Cuenta con tres programas
independientes (días de la semana,
intervalos de riego o días pares /impares).
Cinco partidas por programa. Tiempo de
riego, 1 min a 13 hr.
El sistema:
290.000pesos chilenos
Aproximado a pesos
colombianos 1`200.000 sin
contar con el costo de envió
Tabla 17. Cotización sistema de riego empresa venturi programador interior “caddy” wifi
WILCATEC
Control de riego por
tablero industrial
Programación por tiempos.
Mediciones de humedad y temperatura solo
si se compra módulo adicional.
Tablero:
$3.800.000 + IVA
Válvula C/U:
$400.000 + IVA
No se incluyen costos de
instalación, mantenimiento y
envío, son cargos adicionales.
Costo aproximado: $6’000.000
Tabla 18. Cotización sistema de riego empresa wilcatec
6.3 Factor diferenciador
Actualmente los sistemas de automatización en el mercado permiten el control de riego por medio de
control de tiempo o ciclos de aspersión, el primero permite definir la hora de riego en el cultivo, la segunda
define cuantas veces al día se va a realizar el riego. En su gran mayoría el control es en sitio y muy pocos
sistemas permiten un control remoto y los pocos que ofrecen este servicio mantienen un precio muy
elevado de compra, y así como son escasos los de control remoto son aún más escasos los sistemas que
permiten controlar el riego por sensores, siendo sistemas que no cuentan con el manejo de muchas
variables que determinan el crecimiento de un cultivo.
El factor diferenciador del producto por medio de la investigación y diseño de este proyecto, es el control y
visualización de la humedad del terreno, el control de fumigación por surcos todo esto de forma remota.
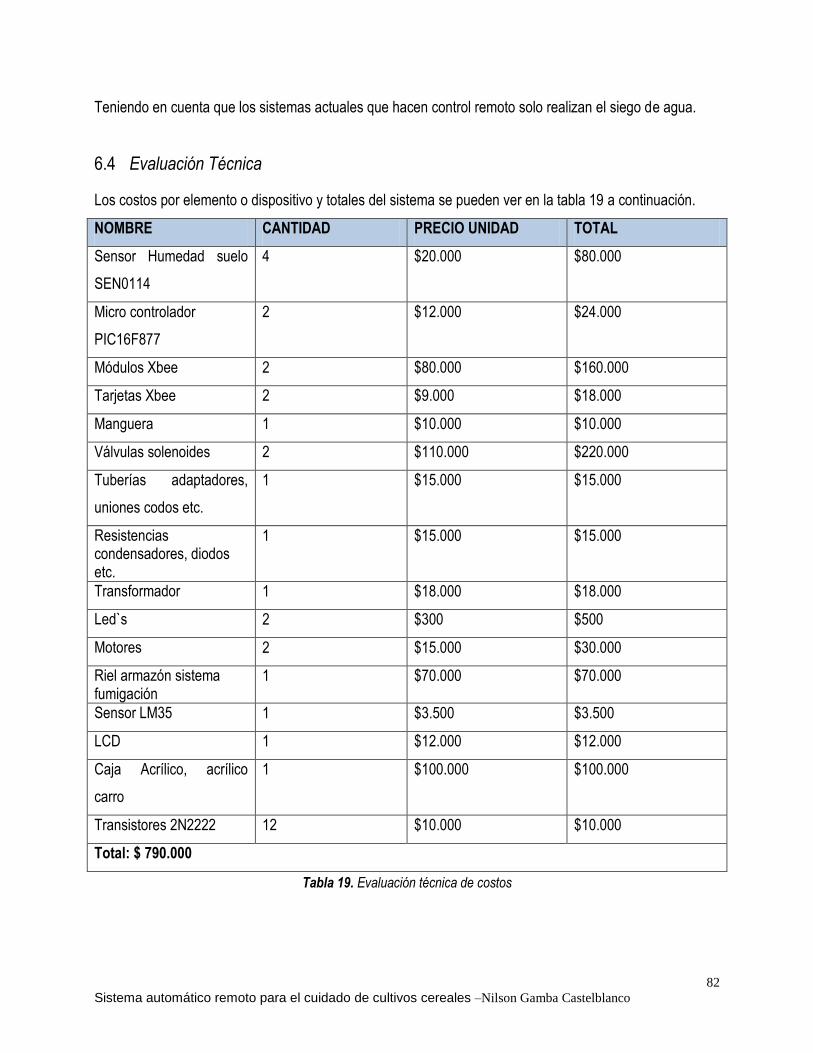
82
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Teniendo en cuenta que los sistemas actuales que hacen control remoto solo realizan el siego de agua.
6.4 Evaluación Técnica
Los costos por elemento o dispositivo y totales del sistema se pueden ver en la tabla 19 a continuación.
NOMBRE CANTIDAD PRECIO UNIDAD TOTAL
Sensor Humedad suelo
SEN0114
4 $20.000 $80.000
Micro controlador
PIC16F877
2 $12.000 $24.000
Módulos Xbee 2 $80.000 $160.000
Tarjetas Xbee 2 $9.000 $18.000
Manguera 1 $10.000 $10.000
Válvulas solenoides 2 $110.000 $220.000
Tuberías adaptadores,
uniones codos etc.
1 $15.000 $15.000
Resistencias condensadores, diodos etc.
1 $15.000 $15.000
Transformador 1 $18.000 $18.000
Led`s 2 $300 $500
Motores 2 $15.000 $30.000
Riel armazón sistema fumigación
1 $70.000 $70.000
Sensor LM35 1 $3.500 $3.500
LCD 1 $12.000 $12.000
Caja Acrílico, acrílico
carro
1 $100.000 $100.000
Transistores 2N2222 12 $10.000 $10.000
Total: $ 790.000
Tabla 19. Evaluación técnica de costos
83
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
El sistema cuenta con una caja acrílica que protege al sistema contra la lluvia pero no sobra como medida
preventiva tener este sistema resguardado, el control del sistema en su mayoría lo efectúa el programa en
visual (programa de instalación “Riego automatizado”), este envía la información de control al micro
controlador para que se activen ya sea las válvulas o los motores o para envió de la información de
humedad.
El programa tiene una interfaz sencilla de manejo.
6.5 El cliente
Básicamente este sistema va dirigido a la mayor parte de agricultores del país en este caso a los
cultivadores del municipio de Nuevo Colon. El sistema de riego es altamente adaptable a varios cultivos ya
que en sus inicios se diseñó para un cultivo de fresa, pero el sistema de fumigación tiene sus limitaciones,
por lo que no es muy aplicable a cultivos de grandes extensiones, estaría más encaminado a cultivos en
invernaderos.
Este tipo de productos no es de consumo muy común y requiere de mantenimiento, aunque el sistema sea
robusto y no requiera de mantenimientos muy periódicos lo requiere al final de cuentas.
Las ventajas de adquirir un producto como estos es que el consumidor que se haga acreedor de este
permanece con él por muchos años.
El cliente tiene la posibilidad de controlar el sistema de la forma que lo desee, ya que puede ahorrar costos
y solo hacer control por tiempos o ciclos y así evitar el costo y cuidado de los sensores.
84
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
7 CONCLUSIONES Y TRABAJO FUTURO
Al hacer el control de humedad del suelo del lugar, se evidencia que los suelos en el municipio de Nuevo
Colon tienden a ser húmedos así como también su clima, y se halla un mayor favoritismo del cliente por
utilizar el sistema por tiempos y no por registro de humedad.
En la instalación del sistema de goteo hubo dificultades con la presión con la que el agua llegaba al cultivo
por esto mismo se tomó la decisión de abastecer el cultivo de agua de un tanque y que el agua llegara al
cultivo por gravedad, de igual manera se ajustó la válvula para que redujera la presión.
El sistema de riego de fungicidas e insecticidas, funciono mejor de lo esperado, permitiendo un riego
controlado sobre las plantas y reduciendo el contacto del cultivador con los químicos
A pesar de la desventaja de cuatro a cinco días de germinación de la semilla de frijol en el surco
automatizado el sistema permitió que el cultivo de automatizado arrojara resultados satisfactorios.
A pesar de no verse grandes cambios comparativos entre los surcos de pruebas y tradicionales, en las
primeras semanas, después de la séptima semana se pudo diferenciar el rendimiento del sistema
comparado con el cuidado de cultivos tradicionales.
85
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Trabajo futuro
Se lograría a futuro implementar la interfaz de usuario en dispositivos móviles mediante algún aplicativo que permita
la conexión con la caja de control, para que a su vez el usuario desde cualquier punto, pueda activar y hacer control
y cuidado de su cultivo a su gusto.
Actualizar o modificar el sistema de fumigación que lo haga mayormente aplicable a aéreas de mayor cobertura, el
sistema permite que la persona no solo lo instale sobre sistemas de riego por goteo sino que a su vez se pueden
instalar sistemas de aspersión. A futuro se puede lograr que el sistema tenga un mayor control en la presión del agua
y así lograr controlar el rango de aspersión al cultivo.
Posibilidad de controlar inalámbricamente los sensores, sin que esto afecte significativamente el precio del sistema,
para disminuir cableado que pueda estorbar sobre el cultivo y adicionalmente aumentar la cobertura de control sobre
el mismo.
A futuro se podría lograr que el sistema enviara registros fotográficos del cultivo para que el cliente
independientemente del lugar en el que este, tenga conocimiento de la evolución de su cosecha y sepa cuando
hacer labores de, fertilización, fumigación y recolección.
Adaptar el sistema de fumigación para permitir una mayor cobertura para tratar cultivos de invernadero.
También se podría desarrollar un sistema de fumigación o aspersión por medio de drones, los cuales permiten
trabajar sobre lugares de mayor cobertura.
86
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
8 BIBLIOGRAFÍA
[1] TEMPLO, Ascencios David, “Sistema de Riego en cultivo de Palto”. UNALM; La Fortaleza, Paramonga, Barranca, Perú. 2012. [En Línea:
PDF]. Revisado: (12 de Julio de 2014).
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CBwQFjAA&url=http%3A%2F%2Fwww.agrobanco.com.pe%2
Fdata%2Fuploads%2Fctecnica%2F031-c-palto.pdf&ei=sa_BU4GSKPHjsAS-
xYHoBQ&usg=AFQjCNH_e1yfh4LD75KMIGbCo0hBnp0Qcg&bvm=bv.70810081,d.cWc.
[2] Gorka Echarte Vidaurre, Automatizacion de un sistema de riego por goteo mediante plataforma ARDUINO, 12 de enero de 2012, pp. 10-16,
disponible en http://academica-e.unavarra.es/bitstream/handle/2454/4811/577725.pdf?sequence=1
[3] Pautas_Manejo_Cultivo_Arveja file:///E:/pelis/Pautas_Manejo_Cultivo_Arveja.pdf Ing. Agr. Gabriel María Prieto AER INTA Arroyo Seco – [email protected]
[4] Fenología del cultivo de arveja (Pisum sativum L. var. Santa Isabel) en la sabana de Bogotá en campo abierto y bajo cubierta plástica Julio Ricardo Galindo Pacheco1, Jairo Clavijo Porras2 Revista Corpoica – Ciencia y Tecnología Agropecuaria (2009) 10(1), 5 15 http://www.corpoica.org.co/sitioweb/Archivos/Revista/1.Fenologadelcultivodearveja.pdf
[5] Manejo agronómico ftp://ftp.fao.org/docrep/fao/010/a1359s/a1359s03.pdf FAO-MANA Proyecto
[6] MANUAL TÉCNICO BUENAS PRÁCTICAS AGRÍCOLAS (BPA) EN LA PRODUCCIÓN DE FRÍJOL VOLUBLE Jesús Hernando Arias Restrepo, Ingeniero Agrónomo, Investigador Especialista en Fríjol, CORPOICA. Teresita Rengifo Martínez, Magíster en Ciencias Agrarias, énfasis Fisiología Vegetal, Coordinadora Renglón productivo fríjol voluble y tomate bajo condiciones protegidas, Convenio FAO-MANA Proyecto UTF/COL/027/COL. Maribel Jaramillo Carmona. Ingeniera Agropecuaria, Investigadora particular.
[7] Guia técnica para el cultivo de frijol en los municipios de Santa Lucía, Teustepe y San Lorenzo del Departamento de Boaco, Nicaragua Septiembre del 2009 Dirección: Ing. Efraín García Mendoza. ASOPROL Coordinación: Ing. Juan Carlos Bravo Báez. Consultor Equipo técnico: Ing. Danny Abner Martínez G. Técnico de ASOPROL Ing. Pablo Álvarez Manzanares. Técnico del INTA Hassiel José Valle Angulo. Técnico de ASOPROL Ing. Samuel Elías García Rocha. Técnico de ASOPROL Ing. Julio C. López Calero. Técnico de ASOPROL Wilfredo Serafín Escobar Mendoza. Presidente de ASOPROL Revisión: Ing. Julio Munguía. Especialista IICA Ing. Jesús Pérez Urbina. Especialista RED SICTA Diseño gráfico: Ing. Harlem Aguilar Maradiaga. http://orton.catie.ac.cr/repdoc/A3846E/A3846E.PDF
[8] ASOCIACIÓN INTERNACIONAL DE LA INDUSTRIA DE LOS FERTILZIANTES “Los fertilizantes y su uso, guía de bolsillo para los oficiales
de extensión”. Cuarta Ed. Organización de las Naciones Unidas para la agricultura y la alimentación. Asociación internacional de fertilizantes.
Roma 2002
[9] MARTINEZ Jesús, Adriana Gutiérrez Diez, Mariano Molina Velazquez, Eduardo A. García Zambrano, Facultad de Agronomía, UANL. Juan
Carlos Rodríguez Ortiz, Facultad de Agronomía UASLP. “Riego en hortalizas”. [En Línea: PDF]. Revisado (12 de julio de 2014).
http://www.infoagro.com/hortalizas/riego_horticolas2.htm
[10] ANÓNIMO. División de manejo de aguas Técnica Internacional. [En Línea: PDF]. Revisado (12 de julio de 2014).
http://tecnicainternational.com/manejodeaguas/sistemas-de-riego
[11] GASTELUM Nisshin R, “Uso eficiente del agua a través del sistema de riego por goteo”, John Deere WATER, Foro Estatal Alimentario. [En
Línea: PDF]. Revisado (12 de julio de 2014). 2013.

87
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
[12]J.M Hermoso, M.D torres, J.M Farre, Comparación de riego por goteo y microaspersion en arboles adultos del CV.REED, Actas V
Congreso Mundial del Aguacate 2003. pp. 289-294, disponible en http://www.avocadosource.com/WAC5/Papers/WAC5_p289.pdf
[13] M. AMOROS CASTAÑER, Riego por goteo en cítricos, Editorial AEDOS, Barcelona, Año 2000, pp. 15-17 y 47-55.
[14] DIDÄCTICAS Electrónica. [En Línea: HTML]. Revisado 12de julio de 2014. Disponible en: http://www.didacticaselectronicas.com/
[15] P. Ferrari, A. Flammini, D. Marioli, A. Taroni, Sensori wireless: Da wifi e Bluetooth veso Zigbee e i nuovi standard, Universidad de Brescia,
Enero de 2011, disponible en http://www.ing.unibs.it/~wsnlab/download/WSNlab_tutorial04_gen1.pdf
[16] Singh. R, Mishra. S, Temperature monitoring in wireless sensor network using Zigbee transceiver module, Power, Control and Embedded
Systems (ICPCES), 2010 International Conference on Digital Object Identifier: 10.1109/ICPCES.2010.5698701, Año 2010, pp. 1-4, disponible
en http://neo-listas.udistrital.edu.co:2134/stamp/stamp.jsp?tp=&arnumber=5698701
[17] Wang Qing hui, Bian Li juan, Pang Yu jun, Design of the temperature monitoring system based on ZigBee wireless sensor network, Artificial
intelligence, Management Science and Electronic Commerce (AIMSEC), 2011 2nd International Conference on Digital Object Identifier:
10.1109/AIMSEC.2011.6011071, año 2011, pp. 4612 – 4615, disponible en http://neo-
listas.udistrital.edu.co:2134/stamp/stamp.jsp?tp=&arnumber=6011071
[18] Singh. R, Mishra. S, Pressure monitoring in wireless sensor network using Zigbee transceiver module, Computer and Communication
Technology (ICCCT), 2011 2nd International Conference on Digital Object Identifier: 10.1109/ICCCT.2011.6075166, IEEE Conference
Publications, año 2011, pp. 225 – 229, disponible en http://neo-listas.udistrital.edu.co:2134/stamp/stamp.jsp?tp=&arnumber=6075166
[19] Nandakumar, R, Lalmohan, K.S, Sreejeesh, S.G, Design of Trickle Irrigation Control Unit Using PSoC, Advances in Computing, Control, &
Telecommunication Technologies, 2009. ACT '09. International Conference on
Digital Object Identifier: 10.1109/ACT.2009.24, año 2009, pp. 57 – 59, disponible en http://neo-
listas.udistrital.edu.co:2134/stamp/stamp.jsp?tp=&arnumber=5376853
[20] Yaohua Chen, The design of intelligent drip irrigation network control system, College of mechanical and electric Engineering, Guangzhou
University, año 2010, IEEE Conference Publications
[21], Microcomputer implementation of optimal algorithms for closed-loop control of hybrid stepper motor drives This paper appears in: Industrial
Electronics, IEEE Transactions on Date of Publication: Dec 2000 Author(s): Crnosija, P.
Fac. of Electr. Eng. & Comput., Zagreb Univ., Croatia Kuzmanovic, B. ; Ajdukovic, S. Volume: 47 , Issue: 6 Page(s): 1319 - 1325
Product Type: Journals & Magazin
[22] MÁRTINEZ Jaime J, Gallegos León Héctor. “Producción de fresas en invernadero”. Memorias del IV Simposio Nacional de Horticultura.
Invernaderos: Diseño, Manejo y Producción Torreón, Coah, México, Octubre 13, 14 y 15 del 2004. [En Línea: PDF]. Revisado: (12 de julio
2014). http://www.uaaan.mx/postgrado/images/files/hort/simposio4/08-Produccion_fresa_invernadero.pdf
88
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
[23] GUTIERREZ Daniel, Muñoz Paul, Suarez Arturo..“Automatización de un Sistema de Riego Agrícola por Técnica de Goteo y Aspersión”.
Escuela de Ingeniería Mecatrónica, Universidad Ricardo Palma – Perú. [En Línea: PDF]. Revisado (06 de Julio de 2014). Disponible en:
http://www.google.com.co/url?sa=t&rct=j&q=&
esrc=s&source=web&cd=1&ved=0CBoQFjAA&url=http%3A%2F%2FwFw.urp.edu.pe%2Fpdf%2Fingenieria%2Fmecatronica%2FPaper_Automa
tizacion_de_un_Sistema_de_Riego_CorregiCo.pdf&ei=5Fe7U42zINDgsASgyYCACw&usg=AFQjCNGDZrsjdt9o_19qMwHPmNNJ3AdJVg&bvm
=bv.70138588,d.ccW
[24] Alcaldía de Nuevo Colón – Boyacá, Sitio oficial de Nuevo Colón en Boyacá, Colombia http://www.nuevocolon-boyaca.gov.co/indicadores_anuales.shtml?apc=bexx-1-&x=2800845#otrosind
[25] Freescale Semiconductor, Inc. MC68HC908AP32 MC68HC908AP Family Rev. 2.5 Data Sheet 10/2003 www.freescale.com
http://motorola.com/semiconductors/
[26] PIC16F87XA Data Sheet 28/40/44-Pin Enhanced Fl
[27] L293, L293D QUADRUPLE HALF-H DRIVERS SLRS008B – SEPTEMBER 1986 – REVISED JUNE 2002
www.datasheetcatalog.com
[28] emulación.pdf - Aulas virtuales moodle Universidad Distrital Francisco José de Caldas - Clase instrumentación industrial DOCENTE: Luis Enrique Martín Santamaría.
[29] ZigBee y sus aplicaciones Autor: Ignacio Vidri Salgado Escuela Técnica Superior de Ingeniería-ICAI. Universidad Pontificia Comillas. Asignatura: Comunicaciones Industriales Avanzadas. Curso 2011-2012 http://www.dea.icai.upco.es/sadot/Comunicaciones/avanzadas/Zigbee%20y%20sus%20aplicaciones.pdf
[30] Diapositivas, Tecnología ZigBee - Aulas virtuales moodle - Universidad Distrital Francisco José de Caldas
DOCENTE: Julián R. Camargo
[31] Guía del Usuario XBEE Series 1. Revisión Julio 2 Desarrollada por: Andrés Oyarce Revisada por: Paul Aguayo Eduard Martin Ingeniería MCI LTDA. Luis Thayer Ojeda 0115. Oficina 402 Santiago, Chile www.olimex.cl
[32] tutorial motor DC Copyright A. M. R. 2010. Todos los derechos reservados. [email protected] www.maxonmotor.es
[33] Universidad Politécnica Salesiana, Guayaquil, facultad de ingenierías, aplicación de lenguaje C para micro controlador PIC y visual C en el desarrollo de un sistema de control de acceso peatonal- Eduardo Mendosa Merchán- Luis Chacón Buñay 30 de abril de 2007
[34], L. A. El suelo: gran ausente en la agenda ambiental de Colombia. Universidad de Bogotá Jorge Tadeo Lozano. Bogotá, 1992.
D. Hacia el fortalecimiento de los vínculos entre la Universidad Nacional y la sociedad colombiana. Universidad Nacional de Colombia. Bogotá,
1997.
[35] Jaime J. Martínez Téllez, Héctor M. León Gallegos, Producción de fresas en invernadero, Universidad autónoma de chihuahua, Octubre
13, 14 y 15 del 2004, disponible en http://www.uaaan.mx/postgrado/images/files/hort/simposio4/08-Produccion_fresa_invernadero.pdf
89
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
[36] Ying-bao Zhao, Xue-ling Song, Chao-ying Liu, Zhe-ying Song, Solenoid Valve Respond Time Test System Basing on Single Chip Micro-
computer, Intelligent Human-Machine Systems and Cybernetics, 2009. IHMSC '09. International Conference on Volume: 1Digital Object
Identifier: 10.1109/IHMSC.2009.39, año 2009, pp. 125 – 128.
[37] Pedro Arroyo Agudo, Crisis global del agua: Valores y derechos en juego, Universidad de Zaragoza, disponible en
http://www.idhc.org/cat/documents/CursDH_2011/16_ARROJO_Pedro_01.pdf
[38] Angel Daniel Casaca, Guías tecnológicas de frutas y vegetales, Abril de 2005, disponible en
http://www.zamorano.edu/gamis/frutas/fresa.pdf
[39] Gilberto Vázquez–Gálvez1, Raúl Cárdenas–Navarro2§ y Philippe Lobit Efecto del nitrógeno sobre el crecimiento y rendimiento de fresa
regada por goteo y gravedad
http://www.scielo.org.mx/scielo.php?pid=S0568-25172008000200010&script=sci_arttext
[40] L. A. Ojeda–Real1, R. Cárdenas–Navarro2, P. Lobit2, O. Grageda–Cabrera3, E. Valencia–Cantero1 y L. Macías–Rodríguez Efecto de la
nutrición nítrica y sistemas de riego en el sabor de la fresa (Fragaria x ananassaDuch.)
Instituto de Investigaciones Químico–Biológicas, Universidad Michoacana de San Nicolás de Hidalgo. Francisco J. Mújica s/n, Ciudad
Universitaria. Morelia, Michoacán. México.
http://www.scielo.org.mx/scielo.php?pid=S1027-152X2008000100009&script=sci_arttext
[41], A New Methodology For Using S i n g l e Microprocessor To Control DC Stepper Motors Z. L. Kang and S. F. QU Beijing University of
Aeronautics and Astronautics Beijing, 100083 P.R. China
[42] BIELINSKI M. Santos y Henner A. Obregón, “Prácticas comerciales para la producción de cultivo de fresa en la Florida”, University of
Florida IFAS, [publicado en Línea en PDF] http://edis.ifas.ufl.edu. 2009.
[43] GALVEZ, Vásquez Gilberto, “Efecto del Nitrógeno sobre el crecimiento y rendimiento del regada por goteo y gravedad”, Agric. Téc.
Méx v.34 n.2 México abril a junio. 2008. [En Línea: PDF]. Revisado: (12 de julio de 2014).
http://www.scielo.org.mx/scielo.php?pid=S056825172008000200010&script=sci_arttext
[44] ANÓNIMO. “Fresa colombiana se impone en otros mercados”. Diario la república. [En Línea: HTML].
http://www.larepublica.co/agronegocios/fresa-colombiana-se-impone-en-otros-mercados_23898
[45] FAGRO Universidad de la República Uruguay. “Bombas de agua”. Revisado (24 de Junio de 2014). [En Línea: HTTP]. [En Línea: PDF].
Revisado (12 de julio de 2014). Disponible en:
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=12&ved=0CGcQFjAL&url=http%3A%2F%2Fwww.fagro.edu.uy%2F~hidr
ologia%2Friego%2FBOMBAS%2520PARA%2520USO%2520AGROPECUARIO.pdf&ei=mCeqU_7ZCpSVqAbvvIFo&usg=AFQjCNH8SeA73Ep
JNCqnJGvF_s4qslLWg&sig2=syw6080pj_fby4jqPFQrKw&bvm=bv.69620078,d.b2k
90
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
[46] ANÓNIMO. Ficha técnica del cultivo de fresa. [EN Línea: PDF] Revisado (06 de Julio de 2014), disponible
en:http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CBoQFjAA&url=http%3A%2F%2Fwww.agrolalibertad.gob.p
e%2Fsites%2Fdefault%2Ffiles%2FFicha%2520T%25C3%25A9cnica%2520para%2520el%2520Cultivo%2520de%2520la%2520Fresa_0.pdf&e
i=KoW5U5mFJInKsAS6gYHgDw&usg=AFQjCNE8g6zKLYnmwxAZIf9ffPVBdyHPVA&bvm=bv.70138588,d.cWc
[47] GOBIERNO DEL ESTADO DE MEXICO, ICAMEX, Alianza por el campo (México), ISAGARPA . “Guía técnica para el cultivo de fresa”.
Primera Ed. Año 2005. [En Línea: PDF]. Revisado (06 de julio de 2014) Disponible en:
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=3&cad=rja&uact=8&ved=0CCcQFjAC&url=http%3A%2F%2Fportal2.edo
mex.gob.mx%2Ficamex%2Finvestigacion_publicaciones%2Fhorticola%2Ffresa%2Fgroups%2Fpublic%2Fdocuments%2Fedomex_archivo%2Fi
camex_arch_cultfresa.pdf&ei=KoW5U5mFJInKsAS6gYHgDw&usg=AFQjCNE3H1txQkDS2lMJRA8dhu1hSpvZWQ&bvm=bv.70138588,d.cWc
[48] DIMAS Malagón. Castro.”Los suelos de Colombia”. Ed. Subdirección de Agrología IGAC, revisado (06 de Julio de 2014). [En Línea: PDF].
Revisado (12 de julio de 2014). Disponible en
https://www.google.com.co/search?q=www.sogeocol.edu.co%252Fdocumentos%252F05loss+.pdf%26ei%3DIJ25U_GuGujlsATB8IKoDw%26u
sg%3DAFQjCNE2EE7PGmDPZ7bgHiYbD6uigSUTXQ%26bvm%3Dbv.70138588%2Cd.cWc&ie=utf-8&oe=utf-8&aq=t&rls=org.mozilla:es-
ES:official&client=firefox-a&channel=fflb&gfe_rd=cr&ei=bKO5U8HdBc_O8gezwoEw
[49] PNUD México. “Apéndice. Características físicas, territoriales y poblacionales”. Informe sobre desarrollo humano Michoacán 2007.
Revisado (06 de julio de 2014). [En Línea: PDF].
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=8&ved=0CDcQFjAH&url=http%3A%2F%2Fwww.undp.org.mx%2FIMG
%2Fpdf%2F11IDHmich_apen.pdf&ei=Q6G5U8ixObjesAT21oL4Cg&usg=AFQjCNH9RCZiLaC7DEwvIeXvAnhbm5F9sA
[50] MARTINIANO Castro Popoca, Francisco Miguel Águila Marín, Abel Quevedo Nolasco, Siegfried Kleisinger, Leonardo Tijerina Chávez y
Enrique Mejía Sáenz. “Sistema de riego automatizado en tiempo real con balance hídrico, medición de humedad del suelo y lisímetro”. Ed.
Agricultura Técnica en México Vol. 34 Núm. 4. Octubre – Diciembre de 2008. [En Línea: PDF]. Revisado 10 de Julio de 2014. Disponible en:
http://www.google.com.co/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CBoQFjAA&url=http%3A%2F%2Fwww.scielo.org.mx%2Fpdf%
2Fagritm%2Fv34n4%2Fv34n4a9.pdf&ei=fZfAU9yjB3LsQSKp4GwDA&usg=AFQjCNFrIiTipUQTbucfaDLTuPHFmcPaNQ&bvm=bv.70810081,d.c
Wc
[51] DÁKORA. [En Línea: HTML]. Revisado 12de julio de 2014. Disponible en: http://www.dakora.com.co/
[52] IRRIGACIONES LIMITADA. [En Línea: HTML]. Revisado 12de julio de 2014. Disponible en:
http://imigra.com.co/cundinamarca/bogota/equipos_para_riego/8fe423c8a948d158/irrigaciones_ltda
[53] WILCATEC. [En Línea: HTML]. Revisado 12de julio de 2014. Disponible en: http://www.wilcatec.com/
[54] ANÁLISIS DEL PROTOCOLO ZIGBEE Jorge Pablo Dignani Facultad de Informática
Universidad Nacional de La Plata
http://postgrado.info.unlp.edu.ar/Carreras/Especializaciones/Redes_y_Seguridad/Trabajos_Finales/Dignanni_Jorge_Pablo.pdf
[55] Informe Técnico: Protocolo ZigBee (IEEE 802.15.4) Javier Martín Moreno – [email protected] Daniel Ruiz Fernández – [email protected]
Junio de 2007 http://rua.ua.es/dspace/bitstream/10045/1109/7/Informe_ZigBee.pdf
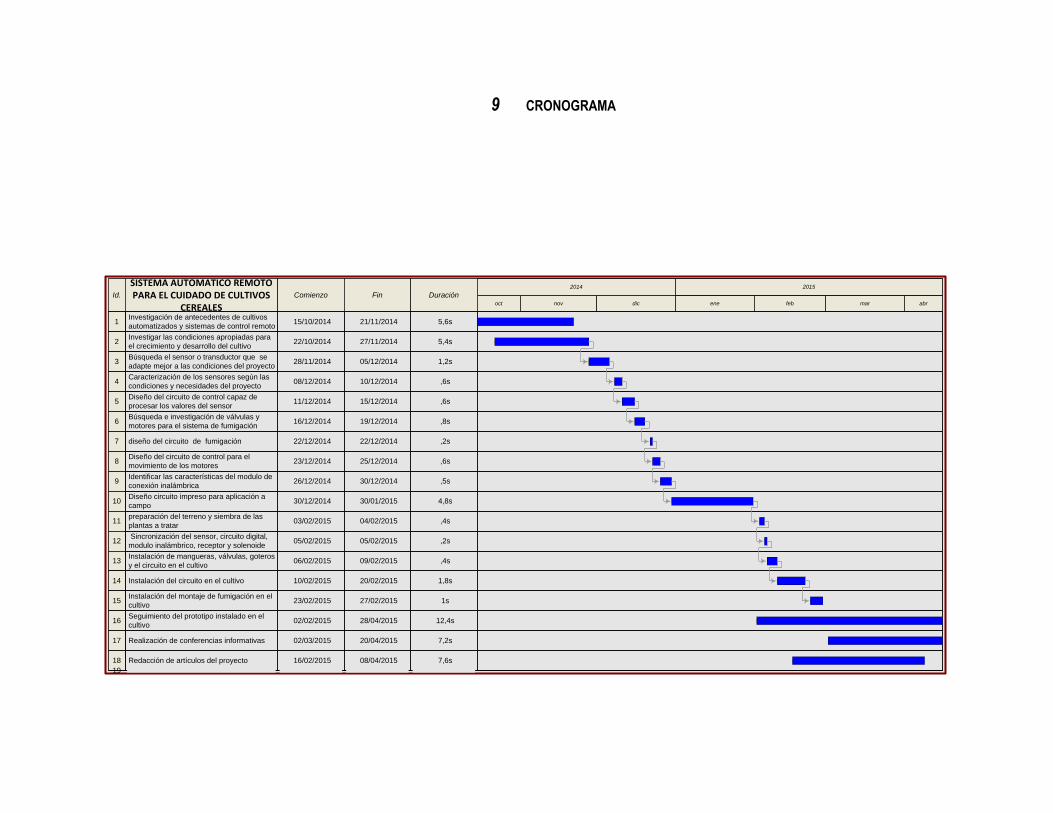
9 CRONOGRAMA
Id.
SISTEMA AUTOMATICO REMOTO PARA EL CUIDADO DE CULTIVOS
CEREALES
Comienzo Fin Duración
2014
oct nov dic ene feb mar abr
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
5,6s21/11/201415/10/2014Investigación de antecedentes de cultivos
automatizados y sistemas de control remoto
5,4s27/11/201422/10/2014Investigar las condiciones apropiadas para
el crecimiento y desarrollo del cultivo
1,2s05/12/201428/11/2014Búsqueda el sensor o transductor que se
adapte mejor a las condiciones del proyecto
,6s10/12/201408/12/2014Caracterización de los sensores según las
condiciones y necesidades del proyecto
,6s15/12/201411/12/2014Diseño del circuito de control capaz de
procesar los valores del sensor
,8s19/12/201416/12/2014Búsqueda e investigación de válvulas y
motores para el sistema de fumigación
,2s22/12/201422/12/2014diseño del circuito de fumigación
,6s25/12/201423/12/2014Diseño del circuito de control para el
movimiento de los motores
,5s30/12/201426/12/2014Identificar las características del modulo de
conexión inalámbrica
4,8s30/01/201530/12/2014Diseño circuito impreso para aplicación a
campo
,4s04/02/201503/02/2015preparación del terreno y siembra de las
plantas a tratar
,2s05/02/201505/02/2015 Sincronización del sensor, circuito digital,
modulo inalámbrico, receptor y solenoide
,4s09/02/201506/02/2015Instalación de mangueras, válvulas, goteros
y el circuito en el cultivo
1,8s20/02/201510/02/2015Instalación del circuito en el cultivo
1s27/02/201523/02/2015Instalación del montaje de fumigación en el
cultivo
12,4s28/04/201502/02/2015Seguimiento del prototipo instalado en el
cultivo
7,2s20/04/201502/03/2015Realización de conferencias informativas
18 7,6s08/04/201516/02/2015Redacción de artículos del proyecto
19
2015
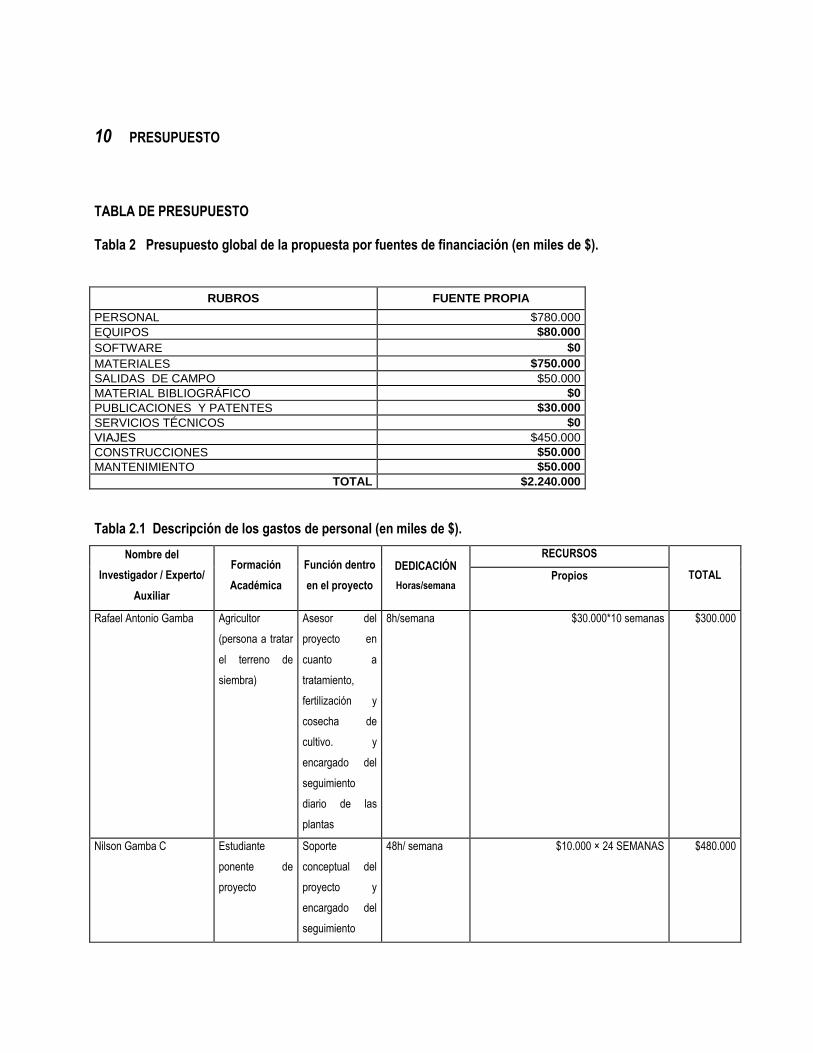
10 PRESUPUESTO
TABLA DE PRESUPUESTO Tabla 2 Presupuesto global de la propuesta por fuentes de financiación (en miles de $).
RUBROS FUENTE PROPIA
PERSONAL $780.000
EQUIPOS $80.000
SOFTWARE $0
MATERIALES $750.000
SALIDAS DE CAMPO $50.000
MATERIAL BIBLIOGRÁFICO $0
PUBLICACIONES Y PATENTES $30.000
SERVICIOS TÉCNICOS $0
VVIIAAJJEESS $450.000
CONSTRUCCIONES $50.000
MANTENIMIENTO $50.000
TOTAL $2.240.000
Tabla 2.1 Descripción de los gastos de personal (en miles de $).
Nombre del
Investigador / Experto/
Auxiliar
Formación
Académica
Función dentro
en el proyecto
DEDICACIÓN
Horas/semana
RECURSOS
TOTAL Propios
Rafael Antonio Gamba Agricultor
(persona a tratar
el terreno de
siembra)
Asesor del
proyecto en
cuanto a
tratamiento,
fertilización y
cosecha de
cultivo. y
encargado del
seguimiento
diario de las
plantas
8h/semana $30.000*10 semanas $300.000
Nilson Gamba C Estudiante
ponente de
proyecto
Soporte
conceptual del
proyecto y
encargado del
seguimiento
48h/ semana $10.000 × 24 SEMANAS $480.000
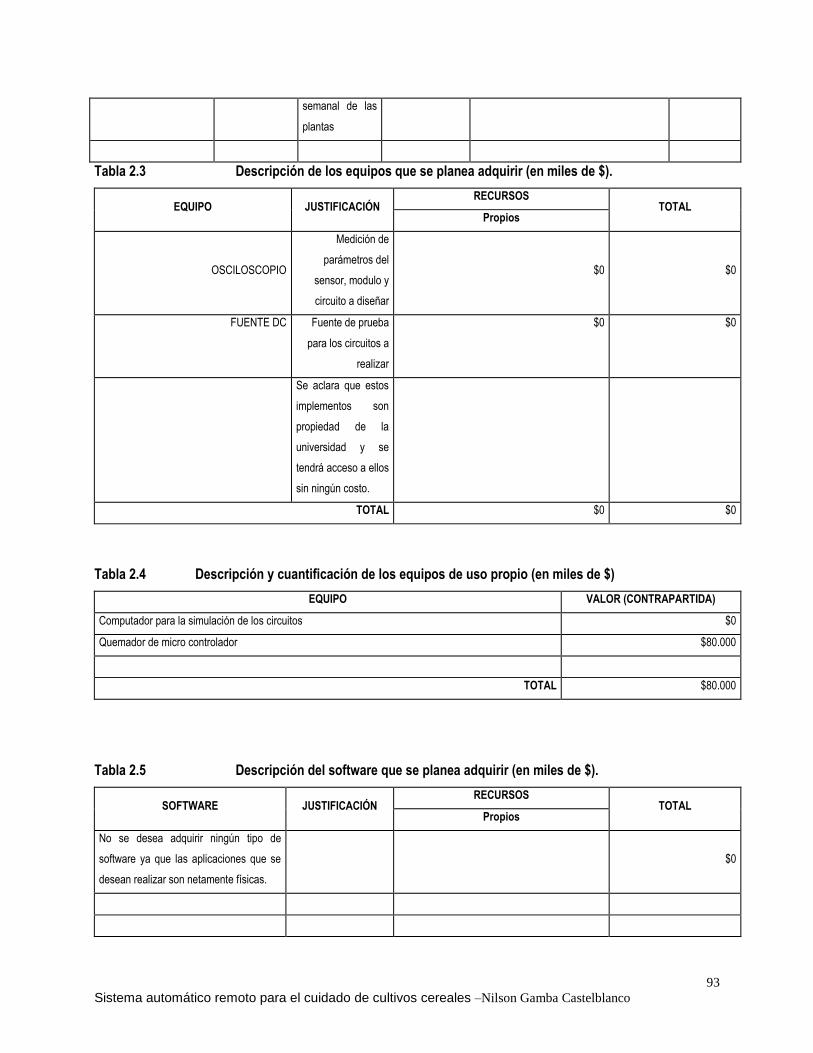
93
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
semanal de las
plantas
Tabla 2.3 Descripción de los equipos que se planea adquirir (en miles de $).
EQUIPO JUSTIFICACIÓN RECURSOS
TOTAL Propios
OSCILOSCOPIO
Medición de
parámetros del
sensor, modulo y
circuito a diseñar
$0 $0
FUENTE DC Fuente de prueba
para los circuitos a
realizar
$0 $0
Se aclara que estos
implementos son
propiedad de la
universidad y se
tendrá acceso a ellos
sin ningún costo.
TOTAL $0 $0
Tabla 2.4 Descripción y cuantificación de los equipos de uso propio (en miles de $)
EQUIPO VALOR (CONTRAPARTIDA)
Computador para la simulación de los circuitos $0
Quemador de micro controlador $80.000
TOTAL $80.000
Tabla 2.5 Descripción del software que se planea adquirir (en miles de $).
SOFTWARE JUSTIFICACIÓN RECURSOS
TOTAL Propios
No se desea adquirir ningún tipo de
software ya que las aplicaciones que se
desean realizar son netamente físicas.
$0
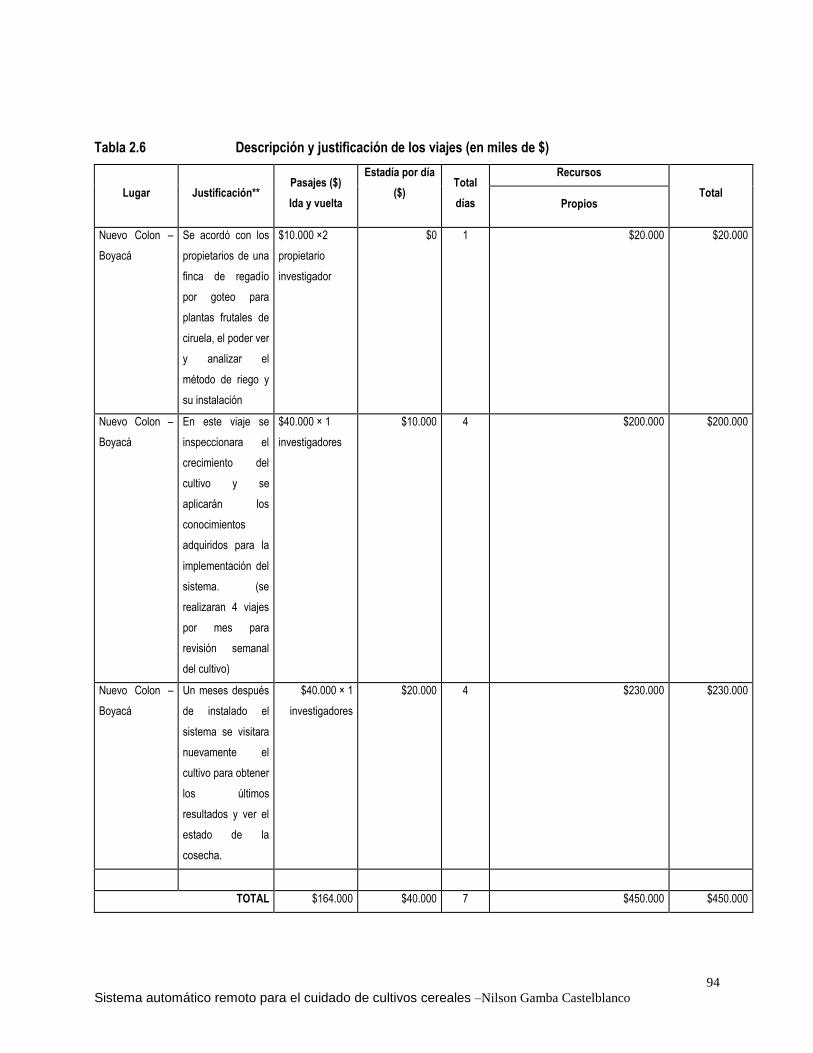
94
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tabla 2.6 Descripción y justificación de los viajes (en miles de $)
Lugar Justificación** Pasajes ($)
Ida y vuelta
Estadía por día
($)
Total
días
Recursos
Total Propios
Nuevo Colon –
Boyacá
Se acordó con los
propietarios de una
finca de regadío
por goteo para
plantas frutales de
ciruela, el poder ver
y analizar el
método de riego y
su instalación
$10.000 ×2
propietario
investigador
$0 1 $20.000 $20.000
Nuevo Colon –
Boyacá
En este viaje se
inspeccionara el
crecimiento del
cultivo y se
aplicarán los
conocimientos
adquiridos para la
implementación del
sistema. (se
realizaran 4 viajes
por mes para
revisión semanal
del cultivo)
$40.000 × 1
investigadores
$10.000 4 $200.000 $200.000
Nuevo Colon –
Boyacá
Un meses después
de instalado el
sistema se visitara
nuevamente el
cultivo para obtener
los últimos
resultados y ver el
estado de la
cosecha.
$40.000 × 1
investigadores
$20.000 4 $230.000 $230.000
TOTAL $164.000 $40.000 7 $450.000 $450.000
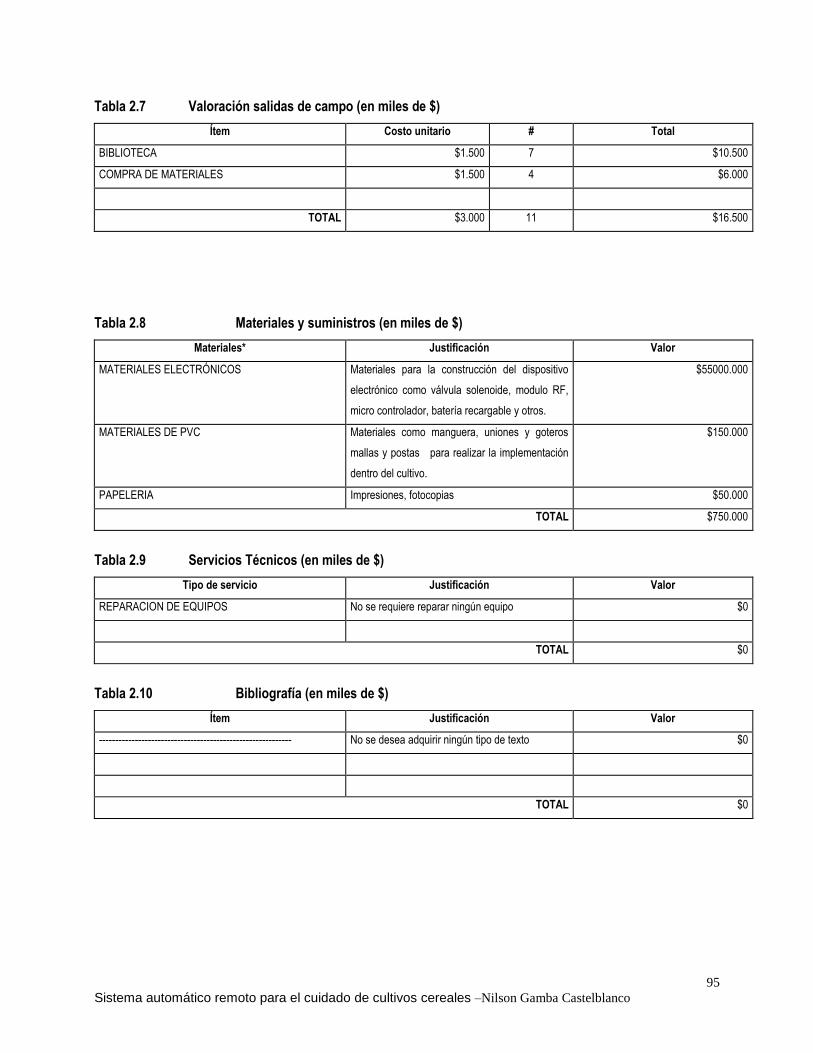
95
Sistema automático remoto para el cuidado de cultivos cereales –Nilson Gamba Castelblanco
Tabla 2.7 Valoración salidas de campo (en miles de $)
Ítem Costo unitario # Total
BIBLIOTECA $1.500 7 $10.500
COMPRA DE MATERIALES $1.500 4 $6.000
TOTAL $3.000 11 $16.500
Tabla 2.8 Materiales y suministros (en miles de $)
Materiales* Justificación Valor
MATERIALES ELECTRÓNICOS Materiales para la construcción del dispositivo
electrónico como válvula solenoide, modulo RF,
micro controlador, batería recargable y otros.
$55000.000
MATERIALES DE PVC Materiales como manguera, uniones y goteros
mallas y postas para realizar la implementación
dentro del cultivo.
$150.000
PAPELERIA Impresiones, fotocopias $50.000
TOTAL $750.000
Tabla 2.9 Servicios Técnicos (en miles de $)
Tipo de servicio Justificación Valor
REPARACION DE EQUIPOS No se requiere reparar ningún equipo $0
TOTAL $0
Tabla 2.10 Bibliografía (en miles de $)
Ítem Justificación Valor
----------------------------------------------------------- No se desea adquirir ningún tipo de texto $0
TOTAL $0