simulaciÓn de una red de acelerÓmetros … · del estado de la malla vial en un sector de la...
TRANSCRIPT

SIMULACIÓN DE UNA RED DE ACELERÓMETROS PARA EL MONITOREO DEL ESTADO DE LA MALLA VIAL EN UN SECTOR DE LA CIUDAD DE
BOGOTÁ, UN ENFOQUE DE APLICACIÓN DE ITS E IOT
PEDRO FELIPE RAMOS ARÉVALO DARWIN JAIR VELANDIA MORALES
UNIVERSIDAD CATÓLICA DE COLOMBIA
FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA DE SISTEMAS
BOGOTÁ D.C 2014

SIMULACIÓN DE UNA RED DE ACELERÓMETROS PARA EL MONITOREO DEL ESTADO DE LA MALLA VIAL EN UN SECTOR DE LA CIUDAD DE
BOGOTÁ, UN ENFOQUE DE APLICACIÓN DE ITS E IOT
PEDRO FELIPE RAMOS ARÉVALO DARWIN JAIR VELANDIA MORALES
Trabajo de grado Modalidad: Trabajo de Investigación
Director LUIS FELIPE HERRERA QUINTERO Ph.D
Director de Programa
UNIVERSIDAD CATÓLICA DE COLOMBIA FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA DE SISTEMAS BOGOTA D.C
2014
3

4
Nota de aceptación
________________________________________________________________________________________________________________________________________________________________________
____________________________ Luis Felipe Herrera Quintero
Director
____________________________ Carlos Alberto Pulido Leal
Revisor Metodológico. Bogotá, 29 de Mayo, 2014
5
AGRADECIMIENTOS
Por medio de estas líneas queremos expresar nuestro más profundo y sincero agradecimiento a todas aquellas personas que con su ayuda han colaborado en la realización del presente trabajo. En primer lugar a Dios, por bendecirnos y permitirnos llegar hasta donde hemos llegado, gracias a Él por este sueño anhelado, a nuestras familias por su amor, esfuerzo, apoyo incondicional y motivación a lo largo de estos años, a ellos ofrecemos todos nuestros triunfos y logros alcanzados. A nuestro director de trabajo de grado, Luis Felipe Herrera Quintero Ph.D., por su constante dedicación, paciencia, apoyo y exigencia, para orientarnos en el desarrollo adecuado del presente trabajo de grado, pero sobre todo por la motivación recibida a lo largo del semestre. Especial reconocimiento merece La Universidad Católica de Colombia, que nos acogió durante nuestros años de formación profesional, dejando a nuestra disposición recursos humanos y técnicos, para permitir nuestra formación como profesionales íntegros, guiados bajo su doctrina, de la cual nos llevamos grandes y gratas experiencias. A todos ellos, muchas gracias
6
CONTENIDO
pág.
GLOSARIO 13 RESUMEN 14 INTRODUCCIÓN 16 1. GENERALIDADES 18 1.1 ANTECEDENTES 18 1.2 PLANTEAMIENTO DEL PROBLEMA 20 1.3 OBJETIVOS 21 1.3.1 Objetivo General 21 1.3.2 Objetivos Específicos 21 1.4 JUSTIFICACIÓN 21 1.5 MARCO REFERENCIAL 22 1.5.1 Marco conceptual 22 1.5.1.1 Internet de las Cosas (IoT) 22 1.5.1.2 Sistemas Inteligentes de Transporte (ITS) 23 1.5.1.3 IPV6 24 1.5.1.4 6LoWPAN 24 1.6 DELIMITACIÓN 25 1.6.1 Espacio 25 1.6.2 Tiempo 25 1.6.3 Alcance 25

7
1.7 METODOLOGÍA 26 1.7.1 Hipótesis 26 1.8 SOFTWARE 26 1.9 HARDWARE 26 1.10 PERSONAL 27 2. ESTADO DEL ARTE 28 2.1 EVOLUCIÓN DE INTERNET 29 2.2 INTERNET DE LAS COSAS (IoT) 30 2.2.1 Características de IoT 31 2.2.1.1 Inteligencia 31 2.2.1.2 Arquitectura 31 2.2.1.3 Sistemas complejos 32 2.2.1.4 Consideraciones de tamaño 33 2.2.1.5 Consideraciones de tiempo 33 2.2.1.6 Consideraciones de espacio 33 2.2.1.7 Todo como servicio 33 2.2.2 Tecnologías para IoT 33 2.2.2.1 Identificación por Radiofrecuencia (RFID) 34 2.2.2.2 Sensores 35 2.2.2.3 Acelerómetro 36 2.2.3 Redes de sensores inalámbricos (WSN) 36 2.2.4 ZigBee 36 2.2.5 6LoWPAN 37

8
2.3. PLATAFORMAS PARA IoT 38 2.3.1 Libelium 38 2.3.1.1 Análisis de WaspMote 38 2.3.2 Atmel 40 2.3.2.1 Análisis de Atmel Inertial Two (AVRSBIN2) 40 2.3.3 Netduino 41 2.3.3.1 Análisis de Netduino 2 41 2.3.3.2 Análisis de Netduino plus 2 42 2.3.4 Análisis de RaspBerry PI 43 2.4 SISTEMAS OPERATIVOS 44 2.5 SIMULADORES DE WSN 47 2.6 Características del proyecto Contiki 50 2.6.1 Características de Cooja 51 2.7 CARACTERÍSTICAS DE OMNET++ 51 2.8 SISTEMAS INTELIGENTES DE TRANSPORTE (ITS) 52 2.9 METODOLOGÍA VIZIR 53 2.9.1 Identificación de daños en la malla vial 54 2.9.2 Identificación de zonas críticas 55 2.9.3 Tiempo empleado en el mejoramiento de la malla vial 55 2.9.4 Filtros 56 3. ELECCIÓN DEL SOFTWARE DE SIMULACIÓN Y DISEÑO 57 3.1 DISEÑO 57 3.2 ARQUITECTURA DEL SISTEMA 58
9
3.2.1 Subsistema de integración con Google Earth 59 3.2.2 Subsistema de recorrido de los vehículos 59 3.2.3 Subsistema Identificar huecos 59 3.2.4 Subsistema categorización de los huecos 59 3.2.5 Subsistema generación reportes 60 3.3 ESPECIFICACIÓN DE REQUERIMIENTOS 60 3.3.1 Requerimientos funcionales 60 3.3.2 Requerimientos no funcionales 60 4. ANÁLISIS DE RESULTADOS 64 4.2 RECORRIDO REALIZADO POR VEHÍCULOS 65 4.3 IDENTIFICACIÓN DE PROBLEMAS EN LA MALLA VIAL 66 4.4 ENTREGA DE RESULTADOS OBTENIDOS 67 4.5 DISMINUCIÓN EN TIEMPOS DE PROCESOS 68 4.5.1 Duración en las acciones de movilidad 69 4.5.2 Duración cambio de la carpeta asfáltica de la vía 70 4.5.3 Duración en la reconstrucción de la vía 71 5. CONCLUSIONES 73 BIBLIOGRAFÍA 75

10
LISTA DE TABLAS
pág.
Tabla 1. Clasificación según rango de frecuencias 34 Tabla 2. WaspMote 39 Tabla 3. Características de Netduino2 42 Tabla 4. Características de Netduino Plus 2 42 Tabla 5. Características de RaspBerry Pi 43 Tabla 6. Resúmenes de sistemas operativos 46 Tabla 7. Simuladores WSN 50 Tabla 8. Procesos y duración 55 Tabla 9. Duración arreglo dependiendo de la gravedad del daño 55 Tabla 10. Requerimientos Funcionales 60 Tabla 11. Reducción de acciones de movilidad 69 Tabla 12. Comparación cambio de carpeta asfáltica 70 Tabla 13. Comparación de reconstrucción de la vía 71

11
TABLA DE FIGURAS
pág.
Figura 1. Ilustración de IoT 23 Figura 2. Funcionamiento de Mote Runner 25 Figura 3. Evolución de Internet 30 Figura 4. Áreas de Desarrollo 31 Figura 5. Nacimiento de IoT entre 2008 y 2009 32 Figura 6. Proceso de conexión de sensores y routers bajo enfoque 6LowPan 37 Figura 7. Integración placa con plataforma 41 Figura 8. Placa con acelerómetros 41 Figura 9. Escenario simulado 58 Figura 10. Arquitectura del Escenario de simulación 59 Figura 11. Imagen satelital del sector simulado 61 Figura 12. Imagen de las vías del sector simulado 62 Figura 13. Modelo de Omnet++ integrado con Google Earth, configurado para
un sector de Bogotá 63 Figura 14. Simulación en Cooja, bajo enfoque 6LowPan 64 Figura 15. Estado de transmisión de paquetes en cooja 65 Figura 16. Recorrido de los vehículos 66 Figura 17. Ejemplo de monitoreo de la malla vial en el simulador 67 Figura 18. Escenario de entrega de resultados 68 Figura 19. Comparación de acciones de movilidad sin acelerómetros y con
acelerómetros 70

12
Figura 20. Comparación cambio carpeta asfáltica 71 Figura 21. Comparativa en tiempos para reconstruir la vía 72
13
GLOSARIO 6LoWPAN: Es un estándar que permite la conexión utilizando IPv6 de dispositivos basados en el estándar IEEE 802.15.4. Permitiendo que dispositivos en una red inalámbrica se comuniquen con otros dispositivos IP. ACELERÓMETRO: son dispositivos que miden la aceleración, que es la tasa de cambio de la velocidad de un objeto en los ejes X, Y y Z. IoT: Internet de las cosas, es la evolución de internet como se conoce, y permite conectar absolutamente todo a la red, con el fin de enviar información para realizar análisis, estadísticas y tomar decisiones certeras y eficaces. INTERCONEXION: Es una técnica, que permite interactuar las distintas redes, con tecnologías y diseños diferentes, con el objetivo que los usuarios conectados, noten el servicio como si se tratara de una sola red. ITS: Sistemas de transporte inteligente, es un conjunto de soluciones computacional, con la ayuda de sensores y dispositivos de alta tecnología, los cuales son aplicados al sector transporte para que sea eficaz, óptimo y sostenible. IPv4: Fue el primer protocolo de internet que se implementó a gran escala, fue la cuarta versión del mismo. Muchas de las direcciones bajo este protocolo fueron asignadas a redes locales LAN‟s, de allí que contribuyera a gran desperdicio de las mismas y se enfocaran en la creación de un nuevo protocolo, actualmente IPv6. IPv6: Es la última versión del protocolo de internet, reemplazó a IPv4, obteniendo sustanciales mejoras y con mejores características. Una de estas es la increíble cantidad de direcciones que ofrece, prácticamente es posible asignarle una IP a cada grano de arena de la tierra y seguirán sobrando direcciones. WSN: Es una red de ordenadores de tamaño diminuto, que están equipados con sensores, que permiten realizar múltiples tareas en conjunto.

14
RESUMEN Actualmente Bogotá, al igual que las grandes metrópolis del mundo, se ve enfrascada en grandes problemas en el sector transporte, lo cual deriva en muchas otras situaciones, por ejemplo, la movilidad, gestión de tráfico, eficiencia del transporte, contaminación ambiental y deterioro de la malla vial, que es muy importante para el desarrollo y buen funcionamiento del sector transporte de la ciudad y del país. En este caso, existen diversas propuestas para mitigar el problema, pero desde el ámbito tecnológico, son abordados por los Sistemas Inteligentes de Transporte (ITS). Tan importantes son los ITS, para el buen funcionamiento del transporte en países desarrollados, que hoy en día son parte fundamental, no solo del transporte público, también han sido llevados hacia otros tipos de transporte. Una forma de optimizar los enfoques de los ITS, consiste en unirlo al enfoque de Internet de las Cosas (IoT). Gracias a estos enfoques, se generan nuevas soluciones, que permiten optimizar la infraestructura actual. Uno de los campos con mayor éxito, es el monitoreo de la malla vial, para controlar posibles problemas y evitar que se conviertan en un problema mucho más difícil de controlar. Para realizar la identificación, es necesario contar con acelerómetros desplegados en la ciudad, ya sea desplegado en vehículos o en la malla vial. En Bogotá, debido al atraso tecnológico, falta de asignación de recursos por parte de los gobiernos, desorganización por parte de las administraciones, es difícil poder realizar un despliegue físico, que permita controlar el estado de la malla vial. Este trabajo de grado, en base a la investigación de los enfoques de IoT e ITS y todos sus componentes, propone realizar una simulación de un escenario, para monitorear el estado de la malla vial de un sector de Bogotá mediante una red de acelerómetros, para validar la viabilidad de realizar el despliegue sobre la ciudad en un futuro. Palabras clave: Sistemas Inteligentes de Transporte (ITS), Simulación, Acelerómetro, Internet de las Cosas (IoT)

15
ABSTRACT
Currently Bogotá, like the great metropolises of the world, is involved in big problems in the transport sector, which leads to many other situations, for example, mobility, traffic management, transport efficiency, environmental pollution and deterioration the road network, which is very important for the development and functioning of the transport sector of the city and the country. In this case, there are currently several proposals to mitigate the problem, but from the technological field, are addressed by the intelligent transportation systems (ITS). So important are the ITS, for the proper functioning of transport in developed countries that today are a fundamental part not only of public transport, have also been brought to other types of transport. One way to optimize approaches to ITS, consist in attach to approach Internet of Things (IoT). With these approaches, new solutions are generated to optimize existing infrastructure. One of the fields most successful, is the monitoring of the road network, to control possible problems and prevent become much more difficult to control problem. For the census, it is necessary to have accelerometers deployed in the city, whether deployed in vehicles or on the road network. In Bogotá, due to technological backwardness, lack of allocation of resources by governments, disorganization by the government, it is difficult to perform a physical deployment, which allows controlling the state of the road network. This degree work, based on research approaches IoT and ITS and all its components, proposes to conduct a simulated scenario, to monitor the state of the road network in a sector of Bogotá, to validate the feasibility of in future the deployment of accelerometers on the city. Keywords: Intelligent Transport Systems (ITS), simulation, accelerometer, Internet of Things (IoT).
16
INTRODUCCIÓN El constante crecimiento y evolución de la sociedad hace pensar en nuevas necesidades y formas de transporte para movilizar a las personas, donde se espera que las soluciones que se propongan en este ámbito sean eficientes y de fácil acceso para todos los usuarios. Además, el incremento de la población mundial es evidente por lo que los estados requieren soluciones claras y contundentes con el fin de dinamizar sus sistemas de transporte para obtener mayores índices de organización en las ciudades y pueblos, entre algunos otros. En el ámbito del transporte es común escuchar que los problemas más frecuentes son congestión vehicular, contaminación ambiental y deterioro de la infraestructura de las vías conocido también como la malla vial, entre otros. Por esto y gracias al avance de la tecnología, para el caso concreto de las soluciones en transporte, el ser humano combinó y se apoyó en la tecnología para articular de una mayor forma el transporte. Es aquí cuando en el año 1991 se crean los Sistemas Inteligentes de Transporte (ITS) que buscan, desde todo punto de vista, mejorar la eficiencia y eficacia de los servicios asociados al transporte incluyendo, por supuesto, la disminución de: la accidentalidad y contaminación ambiental. Existen muchas tecnologías o enfoques que están apoyando las soluciones en transporte y una de las que más está desplegándose son las redes de sensores. En este sentido, tales redes se están convirtiendo en una de las formas más exitosas para adquirir información del entorno, para así, estudiar los distintos fenómenos. Además, el crecimiento de las redes de telecomunicaciones es tan grande que permite que mediante las redes de sensores, se puedan estudiar los problemas asociados al transporte. Mediante tales redes ha sido posible descongestionar las principales vías, controlar la emisión de gases tóxicos que emanan los automotores, desarrollar un modelos de transporte sostenibles donde la eficiencia predomina; de igual forma, obteniendo resultados importantes en materia de control, organización y ejecución de la infraestructura vial. Sumado al enfoque de redes de sensores, hoy en día se habla de Internet de las Cosas (IoT), uno de los enfoques tecnológicos más grandes que está comenzado a revolucionar la forma en que se obtiene la información y por supuesto, comienza a solidificarse para aportar a la sociedad mediante soluciones en diversos ámbitos y todo esto, más en lo relacionado a las soluciones enfocadas a los ITS. En este sentido, se precisa mencionar que este trabajo de grado toma elementos de todos los enfoques tecnológicos mencionados y aborda una de las dificultades que afronta la ciudad de Bogotá en el tema de transporte y es, el deteriorado de la malla vial. En este orden de ideas, gracias a las ventajas de los ITS, en este

17
trabajo de grado, modalidad trabajo de investigación, se realizará un escenario de simulación, para registrar los problemas presentados en la malla vial puntualmente huecos y con ello llevar un proceso automático de recopilación de información que tenga como fin precisar y orientar a los entes encargados de mejorar la malla vial.
18
1. GENERALIDADES
1.1 ANTECEDENTES De acuerdo al tema abordado en este trabajo de investigación, es imprescindible mencionar que en Colombia se ha presentado un deterioro de la malla vial, debido al incremento de vehículos en circulación, fallas geológicas, cambio climático, abandono de administraciones, entre otros factores, que contribuyen a la degradación de la infraestructura vial del país. “Actualmente según el Departamento Nacional de Planeación, la nación cuenta con 187.432,89 Km de malla vial, de los cuales un poco más de 16.000 Km están pavimentados”1, por esta razón las administraciones municipales y especialmente en las grandes ciudades han decidido contrarrestar estos problemas de diferentes maneras, implementando medidas en unos casos con éxito total y en otros no han tenido la mejor acogida o simplemente no han funcionado como se esperaba. En el caso particular de Bogotá, sobre los 8.289 Km de malla vial, más del 80% se encuentra en mal y regular estado, frente a ésta situación tan caótica, se han creado diversas estrategias para contrarrestar el problema. La destinación de recursos para la rehabilitación y el mantenimiento de la red vial, es el principal plan de ejecución por parte de las administraciones en la ciudad, llegando a destinar más de 1.6 billones para esta actividad en el año 2013, de igual forma se realizan contratos con entidades distritales y privadas, esperando lograr inversiones que permitan la recuperación de la red vial, compra de maquinaria, y hasta la creación de una página que permite reportar los huecos de la ciudad, estos son algunos de los planes del distrito para solucionar el problema, sin embargo no se han generado resultados. Casos similares de problemas en la malla vial se han presentado alrededor del mundo, en algunos países y ciudades estas situaciones se han abordado desde diversos aspectos tecnológicos. La primera integración de ideas enfocadas a la solución de problemas en el transporte, surgió en los años 70 para la solución de la congestión vehicular en Singapur, aunque dicha implementación era bastante manual, sentó las bases de lo que más adelante se conocería como un ITS. En los años 90, gracias a los avances tecnológicos, se empezaron a trabajar sobre redes de sensores, que es una serie de nodos equipados con sensores e interconectados para realizar una tarea específica mediante la captura de datos para la toma de decisiones. Uno de los campos de aplicación se dirigió en la búsqueda de soluciones a los diversos problemas que presentaba el transporte,
1 EL UNIVERSAL, Solo el 8.5% de la red vial en Colombia está pavimentada. [en línea] (09/10/2011)
<http://www.eluniversal.com.co/cartagena/nacional/solo-el-85-de-la-red-vial-en-colombia-esta-pavimentada-47681> [citado en 01/04/2014]
19
como la alta congestión vehicular, contaminación del aire generado por los gases de los automotores, monitoreo de la red vial, entre otros. Entre los años 2008 y 2009, debido al crecimiento y evolución de Internet, surge el concepto de IoT, donde existen más dispositivos conectados a la red que personas, y gracias al protocolo IPv6, permite asignar una dirección a cada objeto sobre la tierra, es en este punto donde se presenta la globalización de tecnologías, conceptos y aplicaciones de redes de sensores, llevándola a nivel macro, permitiendo mediante nuevos enfoques abarcar más campos de aplicación y desarrollo, logrando un mayor crecimiento y acceso a la información. Así pues, mediante la integración del enfoque de IoT e ITS, en países y ciudades con alto nivel de desarrollo, se logró intervenir grandes problemas en el sector movilidad obteniendo resultados satisfactorios, en el caso específico que aborda este trabajo, problemas con la malla vial, existen casos puntuales de aplicación con niveles de efectividad óptimos. Concretamente en Massachusetts, Estados Unidos, el Instituto de Tecnología de Massachusetts (MIT), implementó un proyecto de redes de sensores inalámbricos (WSN) bajo el paradigma de IoT, desplegando sensores sobre taxis para cubrir toda la ciudad y mantener un monitoreo en tiempo real del estado de las vías. “Un enfoque similar se llevó a cabo en Sri Lanka por la Universidad de Sri Lanka para la monitorización de todas carreteras en este país”2.
En Oregon, Estados Unidos, se presentó otro caso de exitoso de implementación de un ITS, cuando en vista del continuo incremento del número de kilómetros recorridos de los vehículos por las vías, se requirió una mejora en la calidad, seguridad y capacidad de las carreteras, por consiguiente se trabajó en la puesta en marcha de ITS que permiten gestionar las autopistas, monitorear condiciones climáticas, ofrecer información útil a los conductores, seguridad vial, utilización satelital para la localización del sistema público para determinar una hora más exacta de llegada a los puntos de parada, por último se mejoró la calidad y capacidad en cuanto a operación y mantenimiento efectiva de la malla vial existente; obteniendo un beneficio en áreas rurales donde requerían menos personal en obras3.
El único caso exitoso en Colombia, se presenta en la ciudad de Medellín, donde cuentan con un ITS, llamado SIMM, el cual busca disminuir el número de accidentes viales y mejorar la movilidad de la ciudad, adicional cuentan con una aplicación en los celulares inteligentes de los ciudadanos, donde éstos pueden reportar el lugar exacto en el cual se presenta algún tipo de problema ya sean
2 LIBELIUM, BIELSA, Alberto. Smart Roads – Wireless Sensor Networks for Smart Infrastructures: A Billion
Dollar Business Opportunity. [en línea] (11/01/2013) <http://www.libelium.com/smart_roads_wsn_smart_infrastructures/> [citado 06/02/2014] 3 OREGON DEPARTMENT OF TRANSPORTATION, Intelligent Transportation Systems (ITS): Case Studies
Demonstrating the Benefits of ITS [en línea]. <http://www.oregon.gov/ODOT/HWY/ITS/Pages/its_benefits.aspx> [citado en 03/02/2014]

20
huecos, baches o grietas en el asfalto y en las placas de concreto. “De esta manera en la ciudad se puede llevar un control de la cantidad de daños que han sido reparados y así se garantiza que la ciudad continúe sin daños en la malla vial”4. De acuerdo a todo lo anteriormente mencionado, se ve la existencia de una relación entre temas de IoT, WSN e ITS, en este trabajo se reúnen todas estos conceptos, para generar un escenario de simulación donde se muestra como se trabaja con ellas, utilizando el enfoque 6lowpan. 1.2 PLANTEAMIENTO DEL PROBLEMA En Bogotá, las inversiones realizadas para la restauración de la malla vial son millonarias, sin embargo el problema continúa, de acuerdo a los resultados obtenidos de los estudios ejecutados por la Contraloría Distrital de Bogotá, “sobre los 8.289 kilómetros de la infraestructura vial de la capital, revelan datos desalentadores, el 58% se encuentra en mal estado, el 23.8% en regular y tan sólo el 17.9% en buen estado”5. El notable deterioro de la malla vial no sólo ha producido pérdidas económicas, daños en los vehículos, constante quejas de los ciudadanos, alta congestión vehicular, también ha generado una cantidad significativa de pérdidas humanas, debido a los accidentes que se presentan. “En el año 2013 se produjeron 147 accidentes, de los cuales en 49 solo se ocasionaron daños en los vehículos, los demás dejaron un saldo total de 116 heridos y 7 muertos”6. Aunque Bogotá cuenta con una página web a la cual los ciudadanos pueden acceder para reportar los huecos presentes en la ciudad, esta medida no ha tenido una buena acogida presentando una cantidad de reportes demasiado baja, además los pocos reportados no llaman la atención de la administración distrital y en la mayoría de los casos no se toman las medidas correspondientes y continúan sin ser reparados. En general el problema de la malla vial en la ciudad, ha generado innumerables problemas y sobrecostos; sin contar con los daños ocasionados a los vehículos y accidentes que son generados a raíz de esta situación, en razón de esto, si se
4 EL TIEMPO. GUALDRÓN, Yeison. Así es la lucha de los paisas para no tener huecos en vías de Medellín.
[en línea] (02/12/2013) <http://www.eltiempo.com/colombia/medellin/ARTICULO-WEB-NEW_NOTA_INTERIOR-13248256.html> [citado en 04/02/2014] 5 DINERO.COM, Malla vial de Bogotá, todo un caos., [en línea] (26/11/2013)
<http://www.dinero.com/actualidad/nacion/articulo/malla-vial-bogota-mal-estado-falta-ejecucion-recursos/188533> [citado en 03/02/2014] 6 EL TIEMPO. Redacción Bogotá. Huecos en las vías de Bogotá han causado 3 muertes.[en línea] (16/02/14)
<http://www.eltiempo.com/colombia/bogota/ARTICULO-WEB-NEW_NOTA_INTERIOR-13511381.html> [citado en 29/03/2014]

21
logra articular los enfoques referentes a ITS e IoT, se generan soluciones de carácter tecnológico en diversos escenarios, los cuales pueden ser utilizados concretamente para facilitar el proceso de monitoreo del estado de la infraestructura vial y así recuperar la malla vial. Este trabajo plantea un escenario de simulación de una WSN, que dirija hacia un ITS, monitoreando a través de una red de acelerómetros la malla vial de un sector de la ciudad de Bogotá, para registrar los sitios afectados (huecos, baches) de la malla vial y con ello llevar un proceso automático de recopilación de información, que tenga como fin orientar a los entes distritales a desarrollar planes de mejoramiento de la malla vial. 1.3 OBJETIVOS 1.3.1 Objetivo General Simular una red de acelerómetros para el monitoreo del estado de la malla vial en un sector de la ciudad de Bogotá, un enfoque de aplicación de ITS e IoT. 1.3.2 Objetivos Específicos ● Realizar un estado del arte sobre el internet de las cosas con un enfoque al
protocolo 6LoWPAN.
● Diseñar un escenario que asemeje el estado de la malla vial de un sector de la ciudad de Bogotá.
● Realizar simulación de red de sensores basadas en protocolo 6LowPan.
● Analizar los resultados de las simulaciones, dando indicaciones que permitan
aportar para una futura implementación de una red de acelerómetros en la ciudad.
1.4 JUSTIFICACIÓN La continua y constante evolución de internet, ha generado un nuevo concepto conocido como IoT, que facilita la conexión de cualquier objeto a la red, ha permitido trabajar en diversos campos, como en los ITS, formando nuevas ideas que apoyen y faciliten el despliegue de sistemas que permitan contribuir a la creación de un transporte eficiente y sostenible, así como apoyando al mejoramiento de la infraestructura vial.

22
Lo anteriormente mencionado, evidencia la importancia de estudios, enfocados en la unión de los dos paradigmas, en lugares como Bogotá, ya que estos enfoques y paradigmas, permitirán establecer y validar los parámetros adecuados para un futuro despliegue de una red de acelerómetros, buscando el mejoramiento de infraestructura y calidad del servicio de transporte, donde se afronta un evidente deterioro de la infraestructura vial. 1.5 MARCO REFERENCIAL 1.5.1 Marco conceptual. En este apartado, se realizará una breve descripción de los conceptos más relevantes a ser tenidos en cuenta para el desarrollo satisfactorio de esta investigación. Dado el contexto de la investigación, se analizará primero una muestra referente al enfoque del paradigma de IoT, luego se abordará el tema de ITS, por último se explicará lo relacionado con el protocolo IPv6 y su aplicación a WSN conocida como 6lowpan. 1.5.1.1 Internet de las Cosas (IoT). De acuerdo a lo mencionado, la definición más clara de IoT, es una red de objetos físicos conectados a internet, donde los objetos poseen la tecnología y las características para conectarse entre ellos y/o con ambientes externos para transmitir información. Según distintas investigaciones, “El internet de las cosas permite a las personas y las cosas estar conectados en cualquier momento y lugar con cualquier objeto o persona, idealmente utilizando cualquier sendero de red y cualquier servicio”7. Este enfoque será utilizado, debido al problema de investigación abordado, se desplegará un escenario de simulación, de WSN enfocados bajo el paradigma de IoT, que permitan visualizar problemas en la malla vial de un sector de la ciudad de Bogotá.
Con el despliegue constante de trabajos en IoT, las redes actuales y las futuras estarán conectadas entre sí, con la capacidad de seguridad, análisis y administración, las cuales permitirán un mejor aprovechamiento de los recursos de un país y la adquisición de más conocimiento de los sucesos que ocurren alrededor de la humanidad; lo que significa que a más datos útiles, más información por ser analizada y procesada8.
7 PERERA, Charit, ZASLAVSKY, Arkady, CHRISTEN Peter, GEORGAKOPOULOS, Dimitrios, Context Aware
Computing for The Internet of Things: A Survey. En: IEEE Xplore [en línea] (26 de noviembre de 2013). [citado en 04/02/2014]. ISSN 1530-437X 8 CISCO SYSTEMS INC., EVANS, Dave., Internet de las cosas Como la próxima evolución de Internet lo
cambia todo. [en línea] (Abril de 2011) <http://www.cisco.com/web/LA/soluciones/executive/assets/pdf/internet-of-things-iot-ibsg.pdf> [citado en 01/02/2014]

23
La figura 1, muestra la integración de IoT, en la cual personas y objetos, están conectados, interactuando y obteniendo datos, independiente de su ubicación.
Figura 1. Ilustración de IoT
Fuente: PERERA, Charit. ZASLAVSKY, Arkady. CHRISTEN, Peter. GEORGAKOPOULOS, Dimitrios. Context Aware Computing for the Internet of Things: A Survey. En: IEEE Xplore [en línea] (26 de noviembre de 2013). [Citado en 04/02/2014]. ISSN 1530-437X
En el siguiente apartado, se abordará la definición de ITS, dado que el problema de investigación del presente trabajo, busca la unión entre los paradigmas de IoT y los sistemas de transporte inteligente. 1.5.1.2 Sistemas Inteligentes de Transporte (ITS). Los ITS son un conjunto de soluciones informáticas, las cuales son aplicadas para analizar, diagnosticar, proponer y aprovechar mejor la operación del transporte que se conoce. El interés y la necesidad de generar nuevas tecnologías aplicadas al transporte, nace debido a los problemas de congestión vehicular que se presentaban en la mayoría de las ciudades del mundo. La aplicación de tecnologías de la información y la comunicación en el campo del transporte, permite “fomentar y mejorar la eficiencia de los sistemas de movilidad y seguridad vial, a través de ITS tales como: manejo de transporte, manejo de carreteras y autopistas, manejo arterial, notificación de accidentes, prevención de colisiones, operación y mantenimiento de vías, pagos electrónicos, manejo de accidentes, entre otros”9. “Por tal motivo pretende ayudar mediante toda la innovación, en la generación de
9 ITS COLOMBIA., ITS para Transparencia, Eficiencia y Sostenibilidad de los Sistemas de Movilidad. [en
línea] (Diciembre de 2012) <http://www.its-colombia.org/> [citado en 04/02/2014]

24
un transporte sostenible, lo cual significa una mejoría en su eficiencia, seguridad, limpieza en la calidad del aire y buscando siempre evitar el caos vehicular”10. Por último, en los dos apartados siguientes se abordarán o relacionado al nuevo protocolo de internet IPv6 y su respectivo aplicación en redes de sensores conocido como 6lowpan, dado que de acuerdo a los enfoques de IoT donde se realizan despliegues de redes de sensores a gran escala, para capturar información, estos ya están empezando a utilizarse. 1.5.1.3 IPV6. Debido al incremento continuo de Internet, el protocolo IPv4, se vio limitado para asignar más direcciones y surgió la necesidad de diseñar un nuevo protocolo el cual ofreciera mejores y nuevas características, por tal motivo se crea el protocolo IPv6. El protocolo IPv6, “es la versión mejorada de IPV4 y admite 340 sextillones de direcciones, por el contrario el protocolo IPv4 sólo posibilita 232 direcciones de red diferentes, un número muy limitado para asignar una dirección a cada persona del planeta y a cada dispositivo electrónico existente”11. IPv6 presenta estos cambios y nuevas características. ● Nuevo formato de encabezado ● Espacio de direcciones más grande ● Infraestructura de direcciones y enrutamiento eficaz y jerárquica ● Configuración de direcciones con y sin estado ● Seguridad integrada ● Mejora de la compatibilidad para la calidad de servicio (QoS) ● Nuevo protocolo para la interacción de nodos vecinos ● Capacidad de ampliación
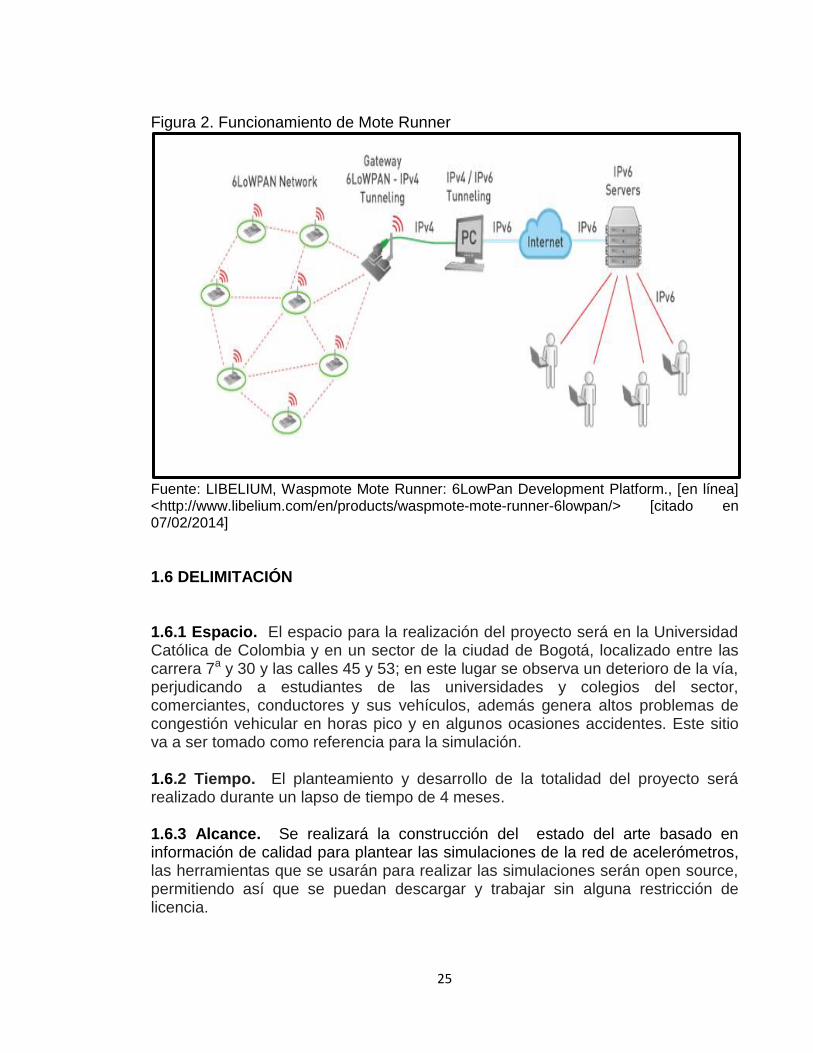
1.5.1.4 6LoWPAN. “Es un acrónimo de IPv6 sobre red de área personal inalámbrica de baja potencia, y ofrece encapsulación, compresión de última punta, mecanismos que permiten a paquetes enviados por protocolo IPv6 enviarse y recibirse por encima de redes basadas en IEEE 802.15.4”12. Libelium e IBM son actualmente pioneros en la implementación de sensores que transmiten información bajo protocolo IPv6. En la figura 2 se puede observar el funcionamiento del dispositivo Mote Runner de Libelium.
10
EUROPEAN COMMISSION MOBILITY AND TRANSPORT., Intelligent transport systems. [en línea] (15/05/2013) <http://ec.europa.eu/transport/themes/its/index_en.htm> [citado en 05/02/2014] 11
MINISTERIO DE TECNOLOGÍAS DE LA INFORMACIÓN Y LAS TELECOMUNICACIONES [en línea] (2011) <http://www.mintic.gov.co/index.php/mn-news/197-20110624> [citado en 04/02/2014] 12
LIBELIUM, Waspmote Mote Runner: 6LowPan Development Platform., [en línea]. <http://www.libelium.com/en/products/waspmote-mote-runner-6lowpan/> [citado en 07/02/2014]
25
Figura 2. Funcionamiento de Mote Runner
Fuente: LIBELIUM, Waspmote Mote Runner: 6LowPan Development Platform., [en línea] <http://www.libelium.com/en/products/waspmote-mote-runner-6lowpan/> [citado en 07/02/2014]
1.6 DELIMITACIÓN 1.6.1 Espacio. El espacio para la realización del proyecto será en la Universidad Católica de Colombia y en un sector de la ciudad de Bogotá, localizado entre las carrera 7a y 30 y las calles 45 y 53; en este lugar se observa un deterioro de la vía, perjudicando a estudiantes de las universidades y colegios del sector, comerciantes, conductores y sus vehículos, además genera altos problemas de congestión vehicular en horas pico y en algunos ocasiones accidentes. Este sitio va a ser tomado como referencia para la simulación. 1.6.2 Tiempo. El planteamiento y desarrollo de la totalidad del proyecto será realizado durante un lapso de tiempo de 4 meses. 1.6.3 Alcance. Se realizará la construcción del estado del arte basado en información de calidad para plantear las simulaciones de la red de acelerómetros, las herramientas que se usarán para realizar las simulaciones serán open source, permitiendo así que se puedan descargar y trabajar sin alguna restricción de licencia.

26
Este proyecto culmina con el análisis de los resultados de las simulaciones, debido a que por falta de presupuesto y tiempo, no se pueden realizar pruebas reales. 1.7 METODOLOGÍA La metodología de investigación elegida para el desarrollo del proyecto es la hipotético - deductiva, que pretende se basa en el planteamiento de una hipótesis para llegar a una deducción. 1.7.1 Hipótesis. Si se logra realizar el despliegue de una red de sensores, bajo el paradigma de IoT y que asemejen un ITS, en la ciudad de Bogotá para monitorear el estado de la malla vial, se lograrían disminuir los tiempos de los procesos en identificación de los huecos, permitiendo reducir costos en trabajos innecesarios, así como mejorar la calidad de vida de las personas. Para cumplir a cabalidad esta metodología, inicialmente se establecerá el tema a ser desarrollado, se planteará la línea que será seguida en el transcurso del semestre de trabajo. Se realizará, el estudio del estado del arte de IoT, redes de sensores inalámbricos y de ITS. También se desarrollarán simulaciones que permitan la recolección de información para que finalmente esta pueda ser analizada. 1.8 SOFTWARE ● Navegador web Google Chrome
● Lector de archivos PDF Adobe Reader
● Microsoft Office 2010
● Simuladores de Tráfico
1.9 HARDWARE ● Equipo de cómputo, con procesador Intel Core 2 Duo 2.20 GHz, 4 GB memoria
ram y OS Windows 7 Ultimate
● Equipo de cómputo, con procesador Intel Core i5 2.50 GHz, 6 GB memoria ram y OS Windows 7 Professional

27
1.10 PERSONAL El proyecto será desarrollado por los estudiantes Darwin Jair Velandia Morales y Pedro Felipe Ramos Arévalo, contará con el acompañamiento del tutor metodológico, Ingeniero Luis Felipe Herrera Quintero.

28
2. ESTADO DEL ARTE
Este capítulo abordará y definirá los conceptos que sustentan y fundamentan teóricamente los aspectos más importantes referentes a IoT e ITS, que serán tenidos en cuenta para el desarrollo de esta propuesta de investigación. IoT es un enfoque tecnológico y de evolución del concepto actual de Internet, basándose en la interconexión de objetos cotidianos y aplicaciones destinadas en la facilitación de esta conexión. “IoT permite generar un entorno de objetos, aplicaciones y servicios inteligentes, permitiendo mejorar y simplificar la vida de la población mundial”13. Actualmente, según la Comisión Europea existen tres áreas de IoT, la primera relacionada con los códigos de barras y la identificación por radiofrecuencia; permitiendo la automatización de inventario, así como el seguimiento y la identificación de productos. La segunda área relacionada con la interconexión de sensores, objetos, dispositivos y aplicaciones, permitiendo la obtención de datos, más adelante convertido en información, y la tercera, conocida como IoT cognitiva, en otras palabras, posee la facultad de procesar información, reutilizando datos y objetos, generando un aprovechamiento de la híper-conectividad e interoperabilidad ya existente. “Adicional a esto, se agrega inteligencia con diferentes niveles en los objetos y dispositivos existentes en la red, logrando establecer prioridades”14. La investigaciones realizadas en el grupo de trabajo dedicado a IoT están financiadas por el Centro de Investigación de Europa, y en este, se trabajan las próximas tecnologías y evolución de las redes actuales; un ejemplo de dicha evolución son las redes móviles 5G. En materia económica, se prevé la generación de billones de euros, con la implementación y posterior uso de IoT, lo que significa mayor crecimiento en materia financiera y mejores oportunidades de empleo. Adicional al factor monetario que se genera con IoT, los beneficios que se obtienen mediante las aplicaciones están encaminados a la generación de ciudades inteligentes, dicha aplicabilidad se logra mediante los avances en la miniaturización e integración de los dispositivos que permiten realizar la recepción de datos, que posteriormente mediante diversos análisis son convertidos en información. “Algunos de los temas abordados en el Centro de Investigación de Europa son la salud, medio ambiente sostenible y los ITS”15.
13
EUROPEAN COMMISSION, Digital Agenda for Europe, The internet of things. [2014] [en línea], disponible en: <http://ec.europa.eu/digital-agenda/en/internet-things>, [citado en marzo 24 de 2014]. 14
Ibíd. 15
Ibíd.

29
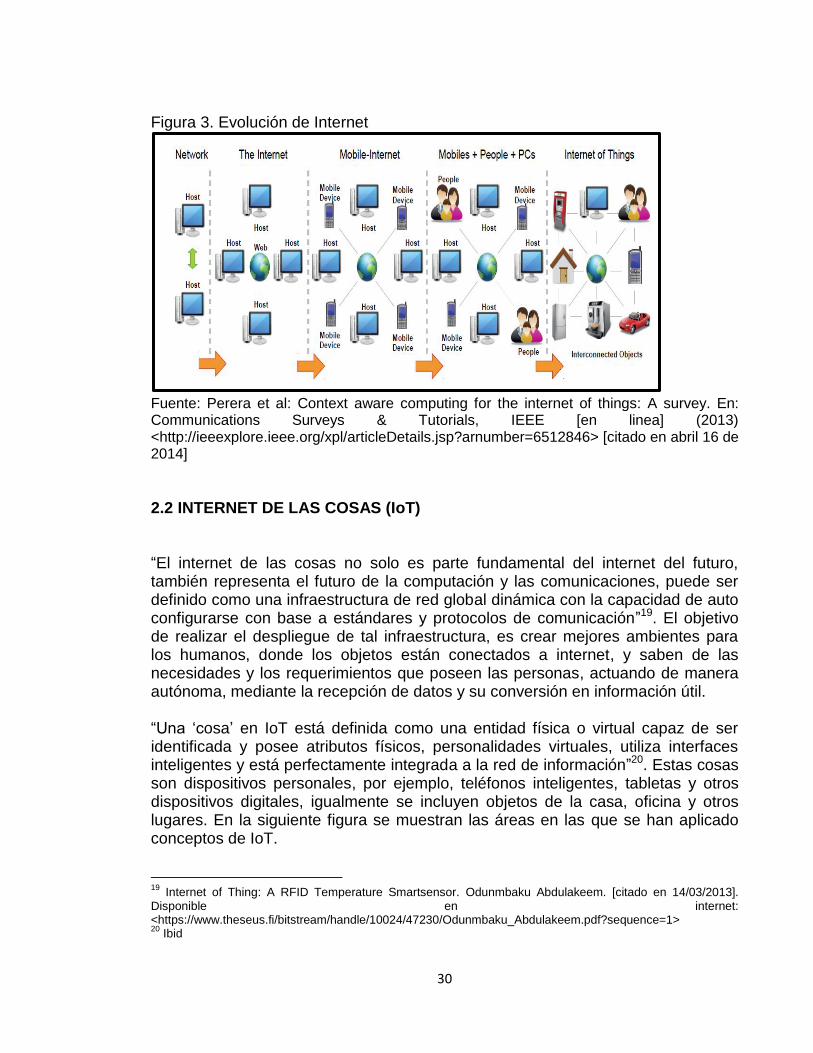
2.1 EVOLUCIÓN DE INTERNET “A finales de los años 60‟s, se realizó la primera conexión entre dos computadoras, gracias a desarrollos logrados en el proyecto ARPANET, dicho proyecto sirvió como base desde finales de esa década hasta los años 90‟s, cuando empezó a ser utilizado el protocolo TCP/IP”16; obteniendo una expansión y crecimiento de Internet a gran escala. El constante desarrollo de nuevas tecnologías de la red, ha dado la posibilidad a los usuarios de acceder a contenidos Web vía móvil y con la aparición de las redes sociales, los usuarios conectados aumentaron considerablemente. A partir de esta serie de conexiones móviles, surge entre los años 2008 y 2009 el concepto del paradigma de IoT, donde todos los objetos que rodean a la humanidad podrán conectarse a la red, y gracias al nuevo protocolo IPv6, “se obtuvieron mejoras en las características disponibles, entre ellas la increíble cantidad de direcciones que ofrece, donde se puede asignar una dirección IP única para cada objeto que se desee vincular”17. La figura 3, muestra la evolución descrita anteriormente, donde se presentan los inicios de Internet, mediante la conexión de dos computadores, recorriendo el camino evolutivo por la creación de la Web, mediante la integración de múltiples ordenadores, más adelante facilitando la conexión de dispositivos móviles a la Web. “Posteriormente las personas se conectan mediante las redes sociales, y en la actualidad donde mantener cualquier tipo de objeto conectado a Internet es posible, gracias a los distintos enfoques tecnológicos como los es IoT”18.
16
RAYTHEON BBN TECHNOLOGIES, The Arpanet Forerunner of Today‟s Internet, [en línea], disponible: en < http://www.bbn.com/about/timeline/arpanet> [citado abril 16 de 2014] 17
PERERA, Charit, ZASLAVSKY, Arkady, CHRISTEN, Peter, GEORGAKOPOULOS, Dimitrios, Context Aware Computing for The Internet of Things: A Survey. En: IEEE Xplore [en línea] (26 de noviembre de 2013). [citado en 03/02/2014]. ISSN 1530-437X 18
PERERA, Charit, ZASLAVSKY, et al. Context Aware Computing for The Internet of Things: A Survey. Opt. Cit
30
Figura 3. Evolución de Internet
Fuente: Perera et al: Context aware computing for the internet of things: A survey. En: Communications Surveys & Tutorials, IEEE [en linea] (2013) <http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=6512846> [citado en abril 16 de 2014]
2.2 INTERNET DE LAS COSAS (IoT) “El internet de las cosas no solo es parte fundamental del internet del futuro, también representa el futuro de la computación y las comunicaciones, puede ser definido como una infraestructura de red global dinámica con la capacidad de auto configurarse con base a estándares y protocolos de comunicación”19. El objetivo de realizar el despliegue de tal infraestructura, es crear mejores ambientes para los humanos, donde los objetos están conectados a internet, y saben de las necesidades y los requerimientos que poseen las personas, actuando de manera autónoma, mediante la recepción de datos y su conversión en información útil. “Una „cosa‟ en IoT está definida como una entidad física o virtual capaz de ser identificada y posee atributos físicos, personalidades virtuales, utiliza interfaces inteligentes y está perfectamente integrada a la red de información”20. Estas cosas son dispositivos personales, por ejemplo, teléfonos inteligentes, tabletas y otros dispositivos digitales, igualmente se incluyen objetos de la casa, oficina y otros lugares. En la siguiente figura se muestran las áreas en las que se han aplicado conceptos de IoT.
19
Internet of Thing: A RFID Temperature Smartsensor. Odunmbaku Abdulakeem. [citado en 14/03/2013]. Disponible en internet: <https://www.theseus.fi/bitstream/handle/10024/47230/Odunmbaku_Abdulakeem.pdf?sequence=1> 20
Ibid

31
Figura 4. Áreas de Desarrollo
Fuente: Benson Tao, Vivante Internet of Thing (IoT) Solutions. [En línea] <http://bensontao.wordpress.com/2013/10/06/vivante-internet-of-things/> [citado en abril 16 de 2014]
2.2.1 Características de IoT. Las principales características que están inmersas en el IoT, son: la inteligencia, arquitectura, sistemas complejos, consideraciones de tamaño, tiempo, espacio y el concepto de todo como servicio. “Las características anteriormente nombradas, siempre deben considerarse a la hora de crear campos de solución utilizando IoT, atravesando todas sus fases de construcción, por ejemplo, diseño, desarrollo, implementación y evaluación”21. A continuación, se realiza la descripción de cada característica: 2.2.1.1 Inteligencia. Como su nombre lo indica, este apartado es la aplicación adecuada de conocimiento. En IoT la aplicación de inteligencia, es obtenida gracias a la recopilación de fuentes de información (sensores), y la consecución de datos. Transformar dichos datos recopilados en información útil y precisa, se logra mediante el seguimiento de los siguientes pasos: la recolección, el modelamiento y razonamiento dado. “El contexto en el que sea analizada y procesada la información es el que permitirá realizar la fusión de los datos arrojados en los sensores para generar nuevos conocimientos en el área en la que se está trabajando”22. 2.2.1.2 Arquitectura. Es posible pensar en la implementación de IoT gracias a la integración de múltiples arquitecturas en una sola, la cual es conocida como arquitectura híbrida. “Dentro del manejo de eventos de la arquitectura híbrida, se
21
PERERA, Charit, ZASLAVSKY, et al. Context Aware Computing for The Internet of Things: A Survey. Opt. Cit 22
Context Aware Computing for the Internet of Things: A Survey. Opt. Cit p. 6

32
suele hablar de dos eventos: manejo de eventos y tiempos; es decir, donde algunos sensores están recibiendo datos cuando algún evento sucede (ejemplo: sensores de puertas), y otros reciben información constantemente, basados en parámetros establecidos (ejemplo: sensores de temperatura)”23. 2.2.1.3 Sistemas complejos. IoT abarca una cantidad significativa de objetos (entre sensores y actuadores), los cuales interactúan entre sí autónomamente. “Según estudios de CISCO se espera un incremento en la cantidad de nuevos objetos que empiecen a conectarse y comunicarse, sobrepasando la cantidad de personas en el mundo”24. Al día de hoy en todo el mundo hay desplegados millones de sensores, y las interacciones pueden variar dependiendo de las capacidades y características que estos posean. Algunos de estos dispositivos tienen escasas capacidades como memoria, procesamiento, entre otras y como tal la información que brindan es mínima y no es posible realizar un proceso de análisis. “En contraste existen objetos con mayores capacidades, por ende las capacidades de razonamiento son elevadas, esto lo convierte en un sistema más inteligente”25. La siguiente figura muestra las estimaciones realizadas por CISCO, donde según estudios entre el año 2008 - 2009 nace el concepto de IoT, donde existen más objetos conectados a la red que población mundial. Figura 5. Nacimiento de IoT entre 2008 y 2009
Fuente: Cisco. Internet de las cosas, como la próxima evolución de internet lo cambia de todo. [En línea]. (2011) <http://www.cisco.com/web/LA/soluciones/executive/assets/pdf/internet-of-things-iot-ibsg.pdf> [citado en abril 16 de 2014] p. 3
23
Ibíd. 24
CISCO, Internet de las cosas, como la próxima evolución de internet lo cambia todo. EVANS, Dave, [en línea], (abril de 2011), Disponible en <http://www.cisco.com/web/LA/soluciones/executive/assets/pdf/internet-of-things-iot-ibsg.pdf> [citado en marzo 18 de 2014] 25
Ibid

33
2.2.1.4 Consideraciones de tamaño. Con la constante evolución y crecimiento de la tecnología y gracias al auge de IoT, está previsto para el año 2020 un despliegue a nivel mundial entre 50 y 100 billones de dispositivos conectados a internet, esto representa un significante aumento en la interacción entre estos objetos, lo cual es necesario para facilitar el desarrollo de Internet de las cosas. “Así como crece la cantidad de objetos que se conectan a Internet, crece de igual manera el número de interacciones realizadas entre ellos. Adicionalmente es importante aclarar que estos números siempre están en constante incremento más nunca disminuirán”26. 2.2.1.5 Consideraciones de tiempo. El internet de las cosas realiza el manejo de billones de eventos paralelos y simultáneos, como resultado del gran número de objetos y sus respectivas interacciones, por tal motivo debe presentar un desempeño óptimo, es en este punto donde “es necesario manejar un procesamiento de datos en tiempo real, para cumplir con la consideración de tiempo en el manejo de las interacciones y los datos que se obtienen”27. 2.2.1.6 Consideraciones de espacio. Para IoT, la ubicación exacta de un objeto en el espacio geográfico será muy importante para el contexto en el que se desea llevar a cabo un desarrollo e implementación. Como se mencionó dentro de las consideraciones de tamaño, el número de objetos será incrementado considerablemente, y es en este punto cuando la cantidad de dispositivos es grande es necesario un seguimiento puntual, y es en este proceso donde juegan un papel importante y además dependiente: “la ubicación, el entorno y la presencia de otros objetos (como personas, otros sensores o dispositivos en la zona)”28. 2.2.1.7 Todo como servicio. En IoT todas las tareas que se realizan tienen el objetivo de prestar un servicio. El modelo de todo como servicio, presenta grandes características como: su elevada eficiencia, su escalabilidad y facilidad de uso. “IoT demanda gran cantidad de la infraestructura que se encuentre desplegada para realizar una visión más real de los acontecimientos a su alrededor, la interacción de los objetos y el intercambio de datos es importante y juega un papel importante ya que representa un modelo donde todo se adapta a la mayoría de efectos para formar un servicio”29. 2.2.2 Tecnologías para IoT. El desarrollo del internet de las cosas depende de la dinámica en la innovación tecnológica en un gran número de campos, según un estudio realizado en el año 2005 por la Unión Internacional de Telecomunicación (ITU).
26
Context Aware Computing for The Internet of Things: A Survey. Opt. Cit p. 6 27
Ibid. 28
Context Aware Computing for The Internet of Things: A Survey. Opt. Cit p. 6 29
Ibid.

34
A continuación se realizará un análisis detallado de cada uno de estos campos. 2.2.2.1 Identificación por Radiofrecuencia (RFID). Es un enfoque tecnológico que utiliza la comunicación entre un lector y una etiqueta, estos sistemas almacenan información en las etiquetas mediante la comunicación que se realiza a través de las ondas de radio, permitiendo así, la identificación y el rastreo automático de los dispositivos. El tamaño de la transmisión de información puede ir desde un bit hasta KBytes. Una etiqueta electrónica, transponder o tag contiene un microchip y una antena que puede adherirse a cualquier objeto, este microchip almacena un número de identificación único, hay varios tipos de esquemas propuestos para estos números, por ejemplo, el código electrónico del producto (EPC), que está basado en la numeración hexadecimal y está “compuesto de 24 dígitos, donde los últimos 9 dígitos hacen de numerador, de tal forma que es posible enumerar más de 68 billones de un mismo producto sin repetir código”30. El sistema de RFID consta de tres principales componentes: ● Una etiqueta, transponder o tag que lleva los datos, adheridos en el objeto para
ser identificado, este normalmente consiste en un elemento de acoplamiento (antena de microondas) y un microchip electrónico que llega a medir aproximadamente ⅓ de milímetro. Estas etiquetas pueden ser pasivas, semi pasivas o activas, dependiendo de su fuente de alimentación energética y su funcionamiento, también pueden ser de solo lectura, lectura y escritura o lectura, escritura y reescritura, dependiendo de cómo se codifican sus datos. La etiqueta no necesita de una fuente de alimentación incorporada, ya que esta toma la energía que necesita del campo electromagnético emitido por los lectores.
● Lector o transceptor, lee los datos transmitidos por la etiqueta. En comparación con la etiqueta el lector es más grande, costoso y requiere más energía de poder.
● Middleware, envía los datos a otros sistemas como por ejemplo a bases de datos, computadores o dispositivos móviles.
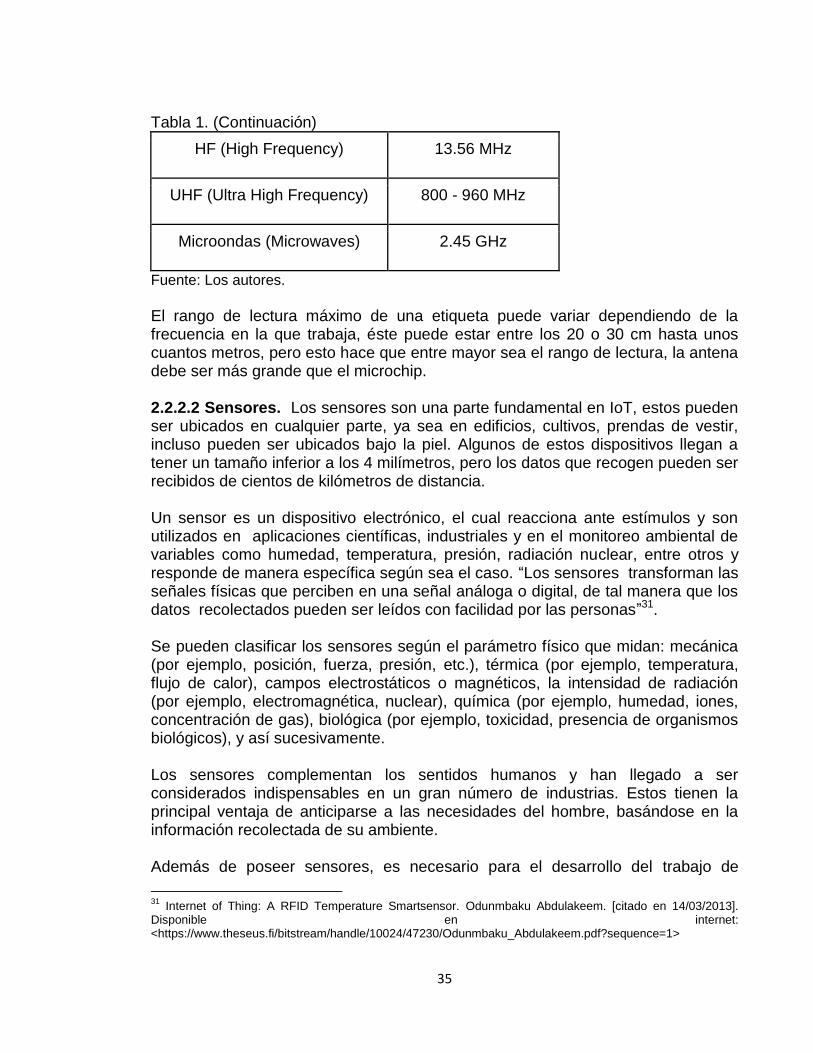
Tabla 1. Clasificación según rango de frecuencias
Frecuencia Rango
LF (Low Frequency) 125 kHz
30
The Global Language of business EPC. Bruselas. GS1. Disponible en internet: <http://www.gs1.org/gsmp/kc/epcglobal> [citado en 12/03/2013]
35
Tabla 1. (Continuación)
HF (High Frequency) 13.56 MHz
UHF (Ultra High Frequency) 800 - 960 MHz
Microondas (Microwaves) 2.45 GHz
Fuente: Los autores.
El rango de lectura máximo de una etiqueta puede variar dependiendo de la frecuencia en la que trabaja, éste puede estar entre los 20 o 30 cm hasta unos cuantos metros, pero esto hace que entre mayor sea el rango de lectura, la antena debe ser más grande que el microchip. 2.2.2.2 Sensores. Los sensores son una parte fundamental en IoT, estos pueden ser ubicados en cualquier parte, ya sea en edificios, cultivos, prendas de vestir, incluso pueden ser ubicados bajo la piel. Algunos de estos dispositivos llegan a tener un tamaño inferior a los 4 milímetros, pero los datos que recogen pueden ser recibidos de cientos de kilómetros de distancia. Un sensor es un dispositivo electrónico, el cual reacciona ante estímulos y son utilizados en aplicaciones científicas, industriales y en el monitoreo ambiental de variables como humedad, temperatura, presión, radiación nuclear, entre otros y responde de manera específica según sea el caso. “Los sensores transforman las señales físicas que perciben en una señal análoga o digital, de tal manera que los datos recolectados pueden ser leídos con facilidad por las personas”31. Se pueden clasificar los sensores según el parámetro físico que midan: mecánica (por ejemplo, posición, fuerza, presión, etc.), térmica (por ejemplo, temperatura, flujo de calor), campos electrostáticos o magnéticos, la intensidad de radiación (por ejemplo, electromagnética, nuclear), química (por ejemplo, humedad, iones, concentración de gas), biológica (por ejemplo, toxicidad, presencia de organismos biológicos), y así sucesivamente. Los sensores complementan los sentidos humanos y han llegado a ser considerados indispensables en un gran número de industrias. Estos tienen la principal ventaja de anticiparse a las necesidades del hombre, basándose en la información recolectada de su ambiente. Además de poseer sensores, es necesario para el desarrollo del trabajo de
31
Internet of Thing: A RFID Temperature Smartsensor. Odunmbaku Abdulakeem. [citado en 14/03/2013]. Disponible en internet: <https://www.theseus.fi/bitstream/handle/10024/47230/Odunmbaku_Abdulakeem.pdf?sequence=1>
36
investigación, comprender el concepto de acelerómetros, que son fundamentales para captar los datos, según el planteamiento propuesto. 2.2.2.3 Acelerómetro. Es un dispositivo que mide la aceleración, que es la tasa de cambio de la velocidad de un objeto. “Esto se mide en metros por segundo al cuadrado (m/s²) o en las fuerzas G (g), además son útiles para detectar las vibraciones y para aplicaciones de orientación”32. La mayoría de los acelerómetros tiene un rango seleccionable de las fuerzas que pueden medir. Estos intervalos pueden variar de ± 1g hasta ± 250g. “Típicamente, el más pequeño de la gama, es el más sensible. Por ejemplo, para medir pequeñas vibraciones sobre una mesa, utilizando un acelerómetro de gama pequeña proporcionará datos más detallados que el uso de uno de 250g”33. Los siguientes dos apartados, abordan conceptos relacionados con WSN y el protocolo ZigBee, un protocolo, que permite realizar conexiones de manera inalámbrica, con grandes prestaciones, además de estar enfocado al uso en WSN. 2.2.3 Redes de sensores inalámbricos (WSN). Las WSN están compuestas de una gran cantidad de nodos llamados sensores o motas, desplegados en lugares donde es imposible llegar con cableado físico o que simplemente sean de difícil acceso y de condiciones extremas para las personas. “Estas redes se caracterizan por ser robustas, escalables y auto-configurables”34. Cada mota consta de un micro controlador, sensores, una fuente de energía y un radio transceptor. Los nodos son capaces de obtener la información de su entorno, procesarla localmente y finalmente enviarla a través de enlaces inalámbricos hasta la estación base. 2.2.4 ZigBee. “Es un estándar que permite las comunicaciones inalámbricas y tiene como objetivo brindar comunicaciones seguras con baja tasa de envío y recepción de datos, optimizando y alargando la durabilidad de las baterías de los dispositivos que permiten la comunicación en las redes inalámbricas”35. El protocolo, ha sido diseñado para transmitir datos, a través de condiciones bastante difíciles, que son gran parte de las aplicaciones comerciales e industriales. Dentro de las características más relevantes que ZigBee ofrece, para trabajar, se encuentran:
32
5Hertz Tutoriales, ABC del acelerómetro [en línea] (17/02/2014) <http://5hertz.com/tutoriales/?p=228> [citado en mayo 30 de 2014] 33
Ibíd. 34
Redes de sensores inalámbricos. Serna Jesús. Bruselas. GS1 [citado en 22/03/2013]. Disponible en internet: <http://www.uv.es/~montanan/ampliacion/trabajos/Redes%20de%20Sensores.pdf> 35
ZIGBEE ALLIANCE, ZigBee Technology [en línea] <https://www.zigbee.org/About/AboutTechnology/ZigBeeTechnology.aspx> [citado en mayo 08 de 2014]

37
Soporte para múltiples topologías de red, por ejemplo, punto a punto, multipunto, malla, entre otras.
Larga duración de la batería.
Baja latencia
Hasta 65.000 nodos por cada red desplegada.
Permite evitar colisiones, reintentos, y reconocimientos 2.2.5 6LoWPAN. En WSN, 6LowPan es un acrónimo de IPv6 sobre red de área personal inalámbrica de baja potencia. “Este protocolo para conexión entre sensores, ofrece encapsulación y compresión de encabezamiento a los paquetes que son enviados y recibidos mediante protocolos IPv6 provenientes de las redes basadas en IEEE 802.15.4 o ZigBee”36. La figura 6 muestra el proceso que realizan los sensores y routers interconectados mediante 6LowPan, los cuales transmiten datos, llegando a la red central, permitiendo transmitir información a los dispositivos conectado a la red. Figura 6. Proceso de conexión de sensores y routers bajo enfoque 6LowPan
Fuente: David E. Culler; Wireless mesh networks promise low power IP-based connectivity. [En línea]. (2014) <http://www.iebmedia.com/index.php?id=5974&parentid=63&themeid=255&hft=49&showdetail=true&bb=1&PHPSESSID=ej0gk268imr3b074suttvbrg64> [citado en abril 16 de 2014]
36
ZIGBEE ALLIANCE. ZigBee Standars Overview [en línea] <https://www.zigbee.org/Standards/Overview.aspx> [citado en abril 18 de 2014]

38
2.3. PLATAFORMAS PARA IoT A continuación se realiza la especificación de las distintas plataformas que permiten trabajar IoT bajo enfoques de 6lowpan, además de estar relacionadas con este proyecto, en este apartado se describen sus características. Actualmente existen un crecimiento constante en el número de plataformas que permiten implementar IoT, dentro de las más reconocidas y con mejores resultados de eficiencia se pueden encontrar: Libelium, Xively, Atmel y NI (National Instruments). Para el caso de aplicación del proyecto, se presentarán las plataformas que dentro de sus productos ofrecidos se encuentran sensores con acelerómetros. 2.3.1 Libelium. Es una empresa de ingeniería española, dedicada a ofrecer potentes plataformas de sensores, basadas en código abierto, que permiten desarrollar soluciones para IoT. Libelium en trabajo conjunto con IBM, desarrollaron un kit para soluciones en IoT, que se denominó Internet of Things Started Kit. “El kit está compuesto por los sensores inteligentes de Libelium llamados WaspMote y el sistema operativo de IBM llamado Mote Runner”37. A continuación se hace el análisis de la plataforma WaspMote de Libelium 2.3.1.1 Análisis de WaspMote. Es una plataforma robusta, desarrollada por Libelium, para la creación de grandes WSN con bajo consumo de energía. Este dispositivo tiene la particularidad de presentar alto rendimiento con bajo consumo de energía como se mencionó anteriormente. “Un factor importante es la integración de un acelerómetro, que permite tener en tiempo real movimientos o vibraciones, además permite adicionar varias placas de sensores, para medir múltiples eventos, adicionales a los integrados en la plataforma”38. La tabla 2, presenta las principales características del hardware que ofrece Libelium en sus dispositivos WaspMote Mote Runner:
37
SINC, La empresa zaragozana Libelium lanza con IBM un kit para el internet de las cosas., [en línea] (21 de
octubre de 2013),<http://www.agenciasinc.es/Noticias/La-empresa-zaragozana-Libelium-lanza-con-IBM-un-kit-para-el-internet-de-las-cosas> [citado en 23 de abril de 2014] 38
LIBELIUM, WaspMote., [en línea] <http://www.libelium.com/es/products/waspmote/> [citado en 23 de abril
de 2014]

39
Tabla 2. WaspMote
WaspMote
Micro Controlador
ATmega1281
Frecuencia 7 km = 2.4GHz 24km = 900MHz 40km = 868MHz
Protocolo 802.15.4 ZigBee
Peso 20 gr
SRAM 8KB
EEPROM 4KB
FLASH 128KB
Dimensiones 73.5 x 51 x 13 mm
Entradas/Salidas
7 entradas análogas, 8 Digitales I/O, 2 UART, 1 I2C, 1 SPI, 1 USB, Socket especifico por default para sensores básicos como (temperatura, humedad, luz)
Costo 147,07 US Fuente: Los Autores
Como se observa en la tabla anterior el Mote Runner por su tamaño bastante reducido, permite que sea adaptado en muchos lugares. “Adicionalmente el acelerómetro integrado informa al instante las variaciones de aceleración con relación a los ejes X, Y, Z”39. Utiliza el sistema operativo de IBM, Mote Runner, que está basado en el protocolo 6LowPan, permitiendo conectar el dispositivo a internet bajo el protocolo IPv6. “Permite, configurar los nodos ya sea en C# y Java”40.
39
LIBELIUM, WaspMote Technical Overview., [en línea]
<http://www.libelium.com/es/products/waspmote/hardware/> [citado en 23 de abril de 2014] 40
IBM, Mote Runner., [en línea] (octubre de 2013) <http://www.zurich.ibm.com/moterunner/> [citado en 23 de
abril de 2014]
40
2.3.2 Atmel. Atmel es una compañía líder en el segmento de diseño y creación de micro controladores. Provee algunos dispositivos a otras empresas como Libelium, adicional tiene su propia plataforma para desarrollar redes de sensores inalámbricos y bajo el enfoque 6LowPan. “En convenio con la empresa SENSINODE, implementaron un software para trabajar en redes inalámbricas de sensores bajo el protocolo IPv6, permitiendo obtener un rápido desarrollo de sus productos enfocados a IoT”41. A continuación se realiza el análisis de la plataforma de Atmel, que trabaja bajo el enfoque 6LowPan. 2.3.2.1 Análisis de Atmel Inertial Two (AVRSBIN2). Es una completa plataforma de desarrollo grado 9 de sensores integrados, combina acelerómetro, brújula y un giroscopio, es idóneo para el despliegue y desarrollo de redes de sensores de movimiento. Dentro de esta plataforma esta la serie Atmel Sensors Xplained, que proporciona placas de desarrollo y software, permitiendo la compatibilidad con las plataformas Atmel Xplain, proporcionando una amplia gama de rendimiento en los micro controladores integrados y dependiendo de las necesidades requeridas. “Esta serie ofrece los siguientes acelerómetros: Three-axis gyroscope from InvenSense (IMU-3000) y Three-axis accelerometer from Kionix (KXTF9-1026)”42. Los dispositivos trabajan bajo el software Atmel Software Framework 2.5, que permite acelerar los desarrollos de cada sensor, además de permitir trabajar sobre lenguaje de programación C, que es independiente del hardware trabajado. “Proporciona los drivers necesarios para realizar la configuración total de los sensores, incluyendo la recepción de datos”43. El sistema operativo incluye ejemplos de demostración, que pueden ser integrados de manera sencilla a las bibliotecas de software disponibles y al hardware existente, para facilitar el desarrollo de aplicaciones, por parte de los grupos de desarrollo. La figura 7 muestra la placa base integrada con la plataforma.
41
ATMEL, Atmel Licenses Sensinode's 6LoWPAN Software Stack for Use in Ultra-Low Power Wireless
Hardware Platforms., [en línea] (junio 5 de 2013) < http://ir.atmel.com/releasedetail.cfm?ReleaseID=769304> [citado en abril 23 de 2014] 42
ATMEL, AVR4018: Inertial Two (ATAVRSBIN2) Hardware., [en línea] (enero de 2011)
<http://www.atmel.com/Images/doc8369.pdf> [citado en abril 23 de 2014] 43
ATMEL, AVRSBIN2., [en línea] <http://www.atmel.com/tools/AVRSBIN2.aspx?tab=overview> [citado en abril
23 de 2014]

41
Figura 7. Integración placa con plataforma
Fuente: AVR4018: Inertial Two (ATAVRSBIN2) Hardware User's Guide [en línea] <http://www.atmel.com/images/doc8369.pdf> [citado en marzo 05 de 2014]
La placa con acelerómetros, sin ser integrada a la plataforma es la siguiente: Figura 8. Placa con acelerómetros
Fuente: AVR4018: Inertial Two (ATAVRSBIN2) Hardware User's Guide [en línea] <http://www.atmel.com/images/doc8369.pdf> [citado en marzo 05 de 2014]
2.3.3 Netduino. “Es una plataforma de código abierto, basada en .NET Micro Framework. Utiliza micro controladores ARM de 32 bits, presenta compatibilidad con Arduino”44. 2.3.3.1 Análisis de Netduino 2. Netduino 2 posee tamaño mucho más reducido que WaspMote, pero de características menos prestantes. Posee: GPS, Servo Control, Control energía y batería, Interfaz con interruptores, sensores, LED, entre otros.
44
NETDUINO, Getting Started., [en línea] (Agosto 1 de 2010)
<http://netduino.com/downloads/gettingstarted.pdf> [citado en abril 23 de 2014]

42
Tabla 3. Características de Netduino2
Fuente: Los Autores
2.3.3.2 Análisis de Netduino plus 2. Netduino 2 plus posee el mismo tamaño de Netduino2, de características más prestantes. “Posee: GPS, Servo Control, Control energía y batería, Interfaz con interruptores, sensores, LED, almacenamiento SD, entre otros”45. La tabla 4, muestra las características más importantes que se pueden destacar de Netduino Plus 2 Tabla 4. Características de Netduino Plus 2
Fuente: Los Autores
45
NETDUINO, NetDuino Plus 2 Technical Specifications [en línea]
<http://netduino.com/netduinoplus2/specs.htm> [citado en abril 23 de 2014]

43
2.3.4 Análisis de RaspBerry PI. Es una computadora de bajo costo, en un solo circuito, o placa reducida. Es desarrollada en el Reino Unido por la compañía RaspBerry Pi y tiene como objetivo dar a conocer la computación en escuelas. “Presenta todas las características de una computadora de escritorio, permite navegar por internet, trabajar sobre hojas de cálculo o textos, entre otras funcionalidades”46. “Gracias a las múltiples funcionalidades que ofrece la RaspBerry Pi, se ha utilizado en actividades digitales, por ejemplo, en la toma información de estaciones meteorológicas, para crear patrones en base a los datos suministrados”47. Tiene varios puertos y entradas, dos USD, uno de Ethernet, salida HDMI, su procesador corre a 700 MHz.
Su sistema operativo recomendado, es Raspbian, que es una distribución de Linux, basada en Debian. “Esta perfeccionado para el uso de la RaspBerry PI”48.
En la siguiente tabla, se presentan las características más relevantes del dispositivo RaspBerry Pi Tabla 5. Características de RaspBerry Pi
Fuente: Los Autores
46
RASPBERRY PI, What is a RaspBerry Pi?., [en línea] < http://www.raspberrypi.org/help/what-is-a-raspberry-
pi/> [citado en abril 23 de 2014] 47
Ibíd. 48
RASPBERRY PI, Documentation Raspbian [en línea] <http://www.raspberrypi.org/documentation/raspbian/README.md [citado en abril 23 de 2014]

44
2.4 SISTEMAS OPERATIVOS “Para poder realizar la programación de cada sensor o nodo, es necesario poseer un sistema operativo, que permita implementar la funcionalidad deseada a cada nodo, manteniendo la estructura de cada arquitectura. En el siguiente apartado se mencionaran y explicaran brevemente algunos de los sistemas operativos para motas más utilizados”49. Cada sistema operativo para motas, presenta características distintas, por ejemplo, asignación de recursos, nodos o sensores, estructuras de las redes, etc. “Actualmente con el surgimiento de más tipos de WSN y mejoras en los recursos que permiten implementarlas, ha generado el surgimiento de nuevos sistemas operativos que permitan adaptar más fácil los nuevos enfoques de redes”50. A continuación se explican brevemente algunos de los sistemas operativos más usados:
TinyOS: Es un sistema operativo de código abierto, basado en componentes, flexible y orientado específicamente en el diseño de redes. Incluye protocolos de red, servicios distribuidos, herramientas para controlar y manipular los sensores, y poder obtener los datos arrojados por los nodos. “Presenta continua evolución y mejoras en cada actualización disponible”51.
MantisOS: Sistema operativo, de código abierto, escrito en C y basado en hilos, orientado al diseño de redes de sensores. Al estar basado en hilos, en la ejecución de cualquier aplicación, activa la ejecución de múltiples hilos, adicional es eficiente en el consumo de energía. “Desde el año 2007 no presenta actualizaciones, motivo por el cual no se han solucionado algunos bugs presentados”52.
Contiki: Es un sistema operativo, escrito en C y de código abierto, denominado hibrido, al presentar soporte a eventos y a la vez planificación multihilo. Está orientado al diseño y configuración de nodos de redes de sensores. “Posee integración para trabajar con protocolos IPv6, TCP/IP, entre otros, además de tener interfaz gráfica bastante intuitiva”53.
49
ORTIZ, Antonio. Técnicas de enrutamiento inteligente para redes de sensores inalámbricas. Tesis Doctoral. Albacete.: Universidad de Castilla-La Mancha. Departamento de sistemas informáticos, 2011. P 19 - 20 50
Ibíd. 51
DIAZ, Soledad. Wireless Sensor Networks. [en línea]
<http://www.arcos.inf.uc3m.es/~sescolar/index_files/presentacion/wsn.pdf> [citado en abril 23 de 2014] 52
ORTIZ, Antonio. Técnicas de enrutamiento inteligente para redes de sensores inalámbricas. Op Cit. 53
FERRARI, German, et al., “Sistemas embebidos para tiempo real”, [en línea] (2010) <https://eva.fing.edu.uy/file.php/581/proyectos/2010/DataloggerContiki/DataloggerContiki.pdf > [citado en abril 21 de 2014]

45
SenOS: Es un proyecto multi-institucional, que está orientado a investigación en el uso de arquitecturas de software a entornos informáticos limitados. Presenta soporte a los esquemas energéticos de los sensores. “Es un sistema operativo deficiente en robustez, adaptabilidad y escalabilidad”54.
Nano-RK: “Es un sistema operativo, que ejecuta en tiempo real diseño de redes de sensores inalámbricas. Utiliza tareas para determinar el orden de ejecución de cada orden solicitada. Tiene soporte para plataformas FireFly y MicaZ”55.
LiteOS: Sistema operativo basado en UNIX, creado en la Universidad de Illinois, para el diseño de redes inalámbricas de sensores. Fue creado pensando en presentar un sistema operativo basado en UNIX, que permitiera trabajar sobre redes de sensores, usando programación en hilos. “Sus componentes principales son: LiteShell, LiteFS y su kernel”56.
La tabla 6 presenta un resumen de los sistemas operativos más utilizados para trabajar sobre redes de WSN, además se presenta la arquitectura, modelo de programación, gestión de memoria y de protección, protocolo de comunicación, intercambio de recursos, y soporte para aplicaciones en tiempo real.
54
ORTIZ, Antonio. Técnicas de enrutamiento inteligente para redes de sensores inalámbricas. Op Cit. p20 55
ORTIZ, Antonio. Técnicas de enrutamiento inteligente para redes de sensores inalámbricas. Op Cit.p21 56
OMER, Muhammad, KUNZ, Thomas. Operating Systems for Wireless Sensor Networks: A Survey. [en línea] (31 de mayo de 2011) < http://www.mdpi.com/1424-8220/11/6/5900> [citado en abril 23 de 2014]

46
Tabla 6. Resúmenes de sistemas operativos
Fuente: Operating Systems for Wireless Sensor Networks: A Survey. En: MDPI Open Access Publishing [en línea] (31 de mayo de 2011) <www.mdpi.com/journal/sensors> [citado en abril 23 de 2014]

47
2.5 SIMULADORES DE WSN Debido al alto costo que generaría el despliegue de una WSN para la realización de pruebas, se han desarrollado en el mercado una gran cantidad de simuladores.
A continuación se describirán brevemente algunos simuladores:
NS-2 (Network Simulator 2): Es un simulador de eventos discretos, para la creación de redes de investigación. “Proporciona soporte para realizar la simulación de TCP, enrutamiento y protocolos de multidifusión en redes cableadas e inalámbricas”57.
El proyecto nació en el año 1989, y su evolución fue considerable, hasta el año 1995, cuando DARPA, Xerox Parc, LBL, UCB y USC/ISI apoyaron el desarrollo, hasta la actualidad, adicionalmente DARPA con SAMAN, realizan la investigación y crecimiento de NS.
NS-3 (Network Simulator 3): Es un simulador de eventos discretos, es usado principalmente para fines educativos e investigativos. Simula protocolos unicast y multicast, esta versión a diferencia de NS-2, permite soportar totalmente el flujo del trabajo realizado en las simulaciones. Permite realizar trabajos de alta capacidad, habilitando el uso de NS-3 como herramienta de emulación, soportando simulaciones de redes IP, inalámbricas, y nuevos protocolos de ruteo como OLSR y AODV.
Tom Henderson, uno de los desarrolladores de ns, propone la nueva versión de ns, llamada ns-3, escrita desde ceros en el lenguaje de programación C++. Su investigación y desarrollo fue patrocinado especialmente por investigadores de la Universidad de Washington, el Instituto Tecnológico de Georgia y el grupo de Investigación Planete de INRIA (Instituto Nacional de Investigación en Informática y Automática), de Francia.
TOSSIM: Permite realizar las simulaciones de las aplicaciones del sistema operativo TinyOS, posee gran flexibilidad al permitir sustituir componentes de la simulación, adicionalmente posee integración para trabajar con plataformas ATMega128. Dependiendo del nivel de simulación que se esté ejecutando, permite realizar interrupciones. “TOOSIM, no es nada más que una librería, donde los desarrolladores deben escribir un programa que permita la ejecución de simulaciones, además posee soporte para Python y C++”58.
57
INFORMATION SCIENCE INSTITUTE. The network simulator ns-2. [en línea]
<http://www.isi.edu/nsnam/ns/> [citado en abril 21 de 2014] 58
TINYOS. Tossim [en línea] (10 de mayo de 2013) < http://tinyos.stanford.edu/tinyos-wiki/index.php/TOSSIM> [citado en 22 de abril de 2014]

48
TOSSIM facilita el desarrollo de escenarios de simulación de redes de sensores, permitiendo integrar miles de nodos, compilados directamente desde los códigos de TinyOS. “Incluye además, una interfaz gráfica de usuario (GUI), para visualizar las simulaciones que se están realizando”59.
Omnet++: Es un simulador para construir redes, por medio de módulos discretos orientado a objetos, está escrito en C. Posee funciones para trabajar redes cableadas, inalámbricas, sensores, entre otras. Tiene la funcionalidad de añadir protocolos de internet, modelar y controlar el rendimiento de las redes. “Su entorno de ejecución es basado en el IDE Eclipse, donde se incluyen extensiones para trabajar en tiempo real, emulación de redes, lenguajes de programación y otras funciones”60.
Permite trabajar en sistemas operativos basados en UNIX, como en Windows, su licencia es de distribución publica académica y la versión comercial, llamada OMNEST, está a cargo de Simulcraft Inc. Adicionalmente permite utilizar varias interfaces de usuario, dependiendo del propósito de uso. Omnet++, al ser programado en módulos, permite ejecutar simulaciones distribuidas y paralelas, convirtiendo está en una de las características más importantes.
Se pueden acceder a los códigos fuente del simulador, por medio de compiladores C++ integrados en Omnet++, permitiendo que el simulador, las interfaces y herramientas de desarrollo de simulación sean ejecutadas, como se mencionó anteriormente, sobre sistemas operativos tales como Windows, Linux y algunas versiones de UNIX. Permite adicionar extensiones de simulación, para ser ejecutadas en tiempo real, con lenguajes de programación alternativos a C++, por ejemplo, C# o Java.
GLOMOSIM (Global Mobile Information System Simulator): Es un simulador orientado principalmente a redes inalámbricas y redes inalámbricas descentralizadas AD-HOC, su librería escrita en C, realiza trabajos sobre eventos discretos.
Avrora: Es un simulador escrito en JAVA y de código abierto, para ejecutar programas de simulación integrados en TinyOS. Permite simular sobre dos plataformas Mica2 y MicaZ. La mayor parte de la información que se encuentra en su página no se encuentra activa, por lo que es necesario recurrir a foros de ayuda para solucionar problemas.
Proyecto de investigación que nació del grupo de Compiladores UCLA, que
59
BERKELEY University of California, Electrical Engineering and computer sciences. Simulating TinyOS Networks [en línea] (11 de noviembre de 2003) < http://www.cs.berkeley.edu/~pal/research/tossim.html> [citado en mayo 1 de 2014] 60
OMNET++. Welcome to Omnet++ Community (2013) < http://www.omnetpp.org/> [citado en abril 22 de 2014]
49
buscan herramientas y soluciones para el micro controlador AVR de Atmel, ofreciendo un api en Java para realizar las simulaciones requeridas.
VisualSense: Es un simulador, que permite modelar redes de sensores inalámbricos. Posee sofisticados modelos de canales de comunicación, sensores, protocolos AD-HOC. Puede ser ejecutado en Windows o MAC.
J-SIM: Simulador escrito en JAVA, que permite crear modelos numéricos, este programa está enfocado principalmente a la biomedicina y la fisiología, sin embargo los campos de aplicación científica pueden ser bastante extensos. Permite combinar ecuaciones, integrales, sumatorias, eventos discretos y códigos de procesamiento según los casos necesarios. “Su compilador añade automáticamente los factores de conversión de unidades físicas, así como el rechazo o aprobación de ecuaciones balanceadas. Funciona sobre Windows, Linux y Mac”61.
GTNetS: Es un simulador de redes, integrando todas las funciones requeridas para trabajar sobre el campo de redes de computadores. “Tiene como objetivo crear simulaciones lo más cercanas posibles a estructuras reales”62.
JIST/SWANS: JIST es un motor de simulación, para eventos discretos ejecutados en máquinas virtuales de Java. Es un nuevo enfoque, que permite crear nuevos simuladores para eventos discretos con alta eficacia.
Por otro lado SWANS es un simulador de redes inalámbricas y está construido sobre Jist. Nació como resultado de los pobres resultados que ofrecían los simuladores de red. Estructura sus componentes de software de manera independiente, sin embargo al integrarse generan configuraciones completas para las simulaciones de redes. Posee características similares a NS-2, pero es posible simular redes más grandes y complejas.
En la tabla 7 se muestran los simuladores más comunes en el ámbito de la investigación, presentando aspectos como el lenguajes de programación, estándares y protocolos que soporta, la cantidad de nodos y si cuenta con una interfaz de usuario.
61
PHYSIOME PROJECT, JSim [en línea] (15 de enero de 2014) < http://www.physiome.org/jsim/> [citado en mayo 1d e 2014] 62
GEORGIA TECH, School of electrical and computer engineering, GTNetS About [en linea] <http://www.ece.gatech.edu/research/labs/MANIACS/GTNetS/> [citado en mayo 1 de 2014]

50
Tabla 7. Simuladores WSN
Simulador Lenguaje programación Protocolos y estándares Cantidad
nodos GUI
Ns-2 OTcl TCP, AODV, OLSR, DYMO, 802.11, Bluetooth, Mobile IP,
<100 No
Ns-3 C++, Python IPv4, MAC, Wi-Fi, Wimax, ---- --
TOSSIM nesC 802.15.4 >1000 Si
OmNet ++ C++, NED UDP, TCP, SCTP, IPv4, IPv6, Ethernet, PPP, 802.11, MPLS,
OSPF >1000 Si
COOJA Java IPv4, IPv6, 6LoWPAN, RPL,
CoAP, UDP <100 Si
GLoMoSim Parsec(C,C++) Wi-Fi, LAN, MAC, TCP/IP, >1000 --
UWSin C++ AODV, DSR >1000 --
Avrora Java -------- >1000 Si
SENS C++ SSR, SHR, SRP, MAC, ADOV >100 SI
Castalia C++ MAC <50 --
EmStar nesC/C++ UDP, FFT <50 Si
SENSE C++ DSR, AODV, 802.11 <100 --
VisualSense Ptolemy II Ad-hoc, MAC <50 --
J-Sim Java, TCL MAC 802.11 <100 Si
GTNetS C++ Wi-Fi, WiMax >1000 --
Fuente. Los Autores
De acuerdo a las características, anteriormente mencionadas, se procederá a explicar en los siguientes apartados, las características más relevantes e importantes de los software de simulación que fueron utilizados para el desarrollo del proyecto. 2.6 Características del proyecto Contiki “Es un sistema operativo, escrito en C, que permite multitareas en tiempo real, donde existen gran cantidad de hilos ejecutándose de forma paralela y esperan de
51
un llamado para activarse”63. Adicional a esto, ContikiOS está enfocado a las WSN, proporcionando ejemplos completos de clientes y servidores ejecutados bajo los protocolos de IPv4 e IPv6. Permite al usuario llevar un control del consumo de energía en tiempo de ejecución de cada dispositivo que posee, determinando la eficiencia de los niveles de energía. Adicional al sistema operativo ContikiOS, el proyecto CONTIKI integra el simulador de redes Cooja, espacio dedicado para el desarrollo y prueba de las aplicaciones del sistema operativo. 2.6.1 Características de Cooja. Es una herramienta de simulación escrita en Java, que permite trabajar sobre un único nodo o sensor, de igual forma soporta simulaciones sobre redes de sensores en el computador, sin requerir a los grupos de trabajo poseer los dispositivos físicos. “La ejecución de escenarios simulados, la comunicación entre los dispositivos que conforman la red y periféricos, se realiza en tiempo real”64. Adicional a las anteriores características, Cooja posee interfaz gráfica, facilitando la interacción usuario – simulador, permitiendo adecuar los sensores de acuerdo a sus requerimientos. Admite diferentes niveles de simulación, por ejemplo, nivel de red, código e instrucciones, ajustado, etc. 2.7 CARACTERÍSTICAS DE OMNET++ Es un simulador de redes, compilado por medio de módulos orientados a objetos, está programado en C++. “Su principal área de aplicación son las redes de comunicación, pero al ser tan flexible, puede ser utilizado en diversas áreas, por ejemplo, en la simulación de sistemas complejos de TI, arquitecturas de hardware, entre otras”65. Omnet++, proporciona arquitectura por componentes, para los modelos de simulación, estos componentes o módulos, utilizan un lenguaje de alto nivel, conocido como NED (Network Description), que es bastante poderoso para definir los tipos de topologías con las que se desean trabajar. “Por otro lado, NED, ofrece jerarquía, descripción flexible de topologías, parámetros, soporte flexible al
63
FERRARI, German, et al., “Sistemas embebidos para tiempo real”, [en línea] (2010)
<https://eva.fing.edu.uy/file.php/581/proyectos/2010/DataloggerContiki/DataloggerContiki.pdf > [citado en abril 21 de 2014] 64
KUGLER, Patrick, NORDHUS, et al., Shimmer, cooja and contiki: a new toolset for the simulation of on the one-node signal processing algorithms [en linea] (6 de mayo de 2013). Disponible. ISBN 2325-1425 65
OMNET++, What is omnet++?, [en línea] < http://www.omnetpp.org/home/what-is-omnet> [citado en mayo 1 de 2014]

52
partimiento que pueda presentarse”66. Otra característica importante del simulador, es la posibilidad de reutilizar modelos existentes, que adicionalmente son de carácter gratuito, esto sumado a su arquitectura en módulos, núcleo de simulación, al amplio soporte, gran flexibilidad y soporte de su interfaz gráfica, que es similar a la del ECLIPSE, permiten incorporar los distintos módulos a cualquier aplicación. Los componentes con los que cuenta Omnet++ son:
Biblioteca del núcleo de simulación.
Lenguaje NED, para topologías.
IDE de Omnet++, basado en la plataforma de Eclipse.
GUI, para realizar las simulaciones, enlaces en los ejecutables de la simulación (Tkenv).
Línea de comandos en la interfaz de usuario, para la ejecución de la simulación (Cmdenv).
Utilidades (makefile, herramienta de creación, entre otras).
Documentación, simulaciones de ejemplo, modelos, plataformas, etc. Puede ser ejecutado sobre Linux, Windows y MAC. De acuerdo a los enfoques tecnológicos trabajados en este documento, la idea es abordar uno de los campos con mayor éxito a nivel mundial como son los ITS, en este orden de ideas, en el siguiente apartado, se mencionará el concepto fundamental de ITS, así como de sus características más relevantes y el enfoque que el presente trabajo de grado quiere dar. 2.8 SISTEMAS INTELIGENTES DE TRANSPORTE (ITS) Los ITS son la aplicación de diversos enfoques tecnológicos, de la información y la comunicación en el sector transporte, permitiendo generar un sistema de transporte sostenible, es decir; limpio, eficiente, seguro, etc. “Como se mencionó anteriormente, la integración de diversos enfoques, como la informática, electrónica, sensores, satélites, entre otros, son cada día más importantes dentro de los sistemas de transporte actual, de tal manera que permiten adecuar los recursos actuales de infraestructura para generar mejores servicios de transporte”67.
66
IEEE Entity Web Hosting, Omnet++ Discrete Event Simulation System NED language overview, [en línea] (noviembre de 1999) <http://www.ewh.ieee.org/soc/es/Nov1999/18/ned.htm> [citado en mayo 1 de 2014] 67
EUROPEAN COMMISSION, Digital Agenda for Europe, The internet of things Opt. Cit.

53
Debido al gran desarrollo tecnológico, las aplicaciones de ITS son amplias, basadas en diversos criterios, como la tecnología empleada o el beneficio que se espera obtener. “Algunas de las aplicaciones son: Información inteligente de tráfico, gestión de transporte público, gestión de aparcamientos, entre otros”68. A continuación se detallaran brevemente las aplicaciones mencionadas anteriormente:
Información inteligente de tráfico: Es la integración de todas las fuentes de información de tráfico existentes, mediante el suministro de información en tiempo real de las rutas, y las posibles alternativas, que permiten mantener al usuario informado sobre cualquier contrariedad.
Gestión de transporte público: Mediante la integración de diversas fuentes de información, se tiene acceso a la ubicación de los buses de servicio público, así como del tiempo estimado en llegada al paradero.
Gestión de aparcamientos: Es la unión de tecnologías de sensores, cámaras, entre otros, para determinar la cantidad de espacios disponibles en los aparcamientos, para suministrar a los usuarios la información óptima.
Adicionalmente se trabaja en la automatización de arterias e intersecciones, peajes inteligentes, control de emanación de gases tóxicos, etc., dando lugar a carreteras inteligentes.
Dado el contexto de la investigación, el enfoque que plantea este trabajo de grado modalidad investigación, es plantear un escenario de simulación asemejando un ITS para monitorear el estado de la malla vial de un sector de la ciudad de Bogotá, realizado en Omnet++. En el siguiente apartado, se presentara la categorización para el estado de la malla vial, en Colombia según la metodología VIZIR, con la que se establecen las diferencias de las fallas funcionales y estructurales del estado de la malla vial, para determinar cuál es la causa que genera el problema en las carreteras del país. 2.9 METODOLOGÍA VIZIR “Es un sistema, utilizado por el gobierno de Colombia, desde el año 2002, cuando
68
SEGUI, Joana, MARTINEZ, María., Los sistemas Inteligentes de transporte y sus efectos en la movilidad urbana e interurbana. [en línea] (Agosto de 2004) < http://www.ub.edu/geocrit/sn/sn-170-60.htm> [citado en abril 21 de 2014]
54
INVIAS aprobó el uso esta metodología francesa, para realizar estudios sobre los daños de la malla vial de la Nación, además de establecer las diferencias del deterioro de los pavimentos, en fallas funcionales y estructurales, agrupando los deterioros de la capa asfáltica en dos categorías, que son A y B”69. La categoría A, está relacionada con fallas estructurales en el asfalto, que específicamente son deficiencias en la estructura vial disponible. “Los daños, que están relacionados con esta categoría, abarcan agrietamientos y deformaciones, ocasionadas por el agotamiento de la capa asfáltica”70. La categoría B, está ligada en su mayoría a fallas de carácter funcional, es decir que los problemas identificados en esta categoría, no están relacionados con problemas estructurales en la malla vial. La causa de esta falla, está relacionada con la deficiencia en los procesos de construcción y entornos regionales, que sumados al paso del transporte, dejan en evidencia el problema y aumentan la falla funcional. “Los daños relacionados a esta categoría, pueden ser agrietamientos ocasionados por un motivo diferente al agotamiento de la capa asfáltica, ojos de pescado, desprendimientos y afloramientos”71. Esta metodología, es tenida en cuenta, como se mencionó anteriormente por el Instituto Nacional de Vías INVIAS, para establecer cuál es la falla que presentan las carreteras del país. Para realizar la categorización del escenario de simulación propuesto, se utiliza la categorización empleada por el Instituto de Desarrollo Urbano IDU, que permitirá asignar una categoría a los huecos identificados, con el fin de establecer prioridades para ser intervenidos. La metodología que utiliza el Instituto de Desarrollo Urbano - IDU, para determinar el daño y que categorización se le da a los problemas de la malla vial, está dada por la identificación del daño y así mismo los tiempos aproximados de ejecución de procesos para abordar los daños en la malla vial se definirían en los siguientes apartados. 2.9.1 Identificación de daños en la malla vial. Desde el momento en que se genera el reporte del daño de la vía, por parte de los ciudadanos, tarda entre 1 y 12 meses para ser atendido por el distrito. Las autoridades encargadas también realizan censos de las vías y estos son comparados con los daños reportados por los ciudadanos.
69
CERON, Viviana., Evaluación y comparación de metodologías Vizir y PCI sobre el tramo de vía flexible y rígidos de la vía: Museo Quimbaya – CRQ Armenia. Tesis de especialización. Manizales: Universidad Nacional de Colombia. Facultad de Ingeniería y Arquitectura. 2006. P 14 70
CERON, Viviana., Evaluación y comparación de metodologías Vizir y PCI sobre el tramo de vía flexible y rígidos de la vía: Museo Quimbaya – CRQ Armenia. Tesis de especialización. Manizales: Universidad Nacional de Colombia. Facultad de Ingeniería y Arquitectura. 2006. P 15 71
Ibíd.

55
2.9.2 Identificación de zonas críticas. Tanto el distrito como las autoridades encargadas del mantenimiento de la malla vial, realizan recorridos para identificar las zonas que requieren urgente pavimentación y así inventariar los puntos más críticos, este proceso tarda alrededor de 3 meses. 2.9.3 Tiempo empleado en el mejoramiento de la malla vial. Además de la identificación de los huecos y vías críticas, existen otros procesos que se deben llevar a cabo, antes de ejecutar las obras de mejoramiento de la malla vial. Dentro del trabajo adicional, se encuentra la gravedad de daño que presenta la vía. “En la Tabla 8 se observan los procesos con su respectiva duración, incluidos los dos anteriormente mencionados”72. Tabla 8. Procesos y duración
Proceso Tiempo(días)
Identificación de daños 30 – 365
Identificación vías críticas 90
Licitación 90 – 120
Legalización de la licitación 14
Fuente: Los autores
Adicionalmente, dependiendo que tan afectado se encuentre el lugar, puede llegar a tardar más tiempo el arreglo. En la Tabla 9 se puede observar la duración del arreglo dependiendo de la gravedad del daño. Tabla 9. Duración arreglo dependiendo de la gravedad del daño
Arreglo Tiempo
Acciones de movilidad 20 minutos
Cambio de carpeta asfáltica 8 - 10 días
Reconstrucción de la vía 20 - 30 días
Fuente: Los Autores
En un posible escenario de despliegue real, para realizar la clasificación de los datos que perciben los diferentes dispositivos, es necesario definir los parámetros adecuados en el hardware disponible, esta configuración se conoce como filtros.
72
EL TIEMPO. Tapar un hueco en Bogotá puede tardar hasta 2 años [en línea] (02/08/2014) <http://www.eltiempo.com/archivo/documento/CMS-12968829> [citado en 20/05/2014]

56
En el siguiente apartado, se mencionaran y explicaran brevemente la clasificación de los filtros. 2.9.4 Filtros. Son circuitos integrados, en los dispositivos, que se caracterizan por recibir entradas y salidas, de acuerdo a parámetros establecidos. “Los procesadores de los acelerómetros, tienen en su interior algoritmos detallados para realizar el proceso de filtrado”73. En el caso puntual, para los acelerómetros, la clasificación de los filtros se realiza en cuatro categorías:
Filtro Pasa Bajo: “Este tipo de filtros se enfoca, en disminuir las señales de altas frecuencias que son transmitidas. Mediante el uso de este tipo de filtros, se consigue una atenuación más alta de este tipo de señales que en otros filtros”74.
Filtro Pasa Alta: “Los filtros de este tipo, al contrario de los pasa bajo, es atenuar señales de bajas frecuencias, además de este atenuar, también adelantan la fase y derivan la señal transmitida”75.
Filtro Pasa Banda: “Esta categoría de filtros, permite transmitir señales, en determinados intervalos de frecuencia y bloquear al resto de frecuencias”76.
Filtro Corte de Banda: “Este tipo de filtro, permite el paso de todas las señales en todas las frecuencias, exceptuando un intervalo al que se le bloquearan el paso de señales”77.
73
DEPARTAMENTO DE TECNOLOGIA ELECTRONICA, Tema 4: Filtros [en línea] <http://www.dte.us.es/ing_inf/ins_elec/temario/Tema%204.%20Filtros.pdf> [citado en mayo 12 de 2014] 74
UNIVERSIDAD NACIONAL DE COLOMBIA, Dirección nacional de innovación Académica, Circuitos eléctricos II, Filtros pasa bajos [en línea] <http://www.virtual.unal.edu.co/cursos/ingenieria/2001603/lecciones/cap9/cap9lec4/cap9lec4.htm> [citado en mayo 13 de 2014] 75
UNIVERSIDAD NACIONAL DE COLOMBIA, Dirección nacional de innovación Académica, Circuitos
eléctricos II, Filtros pasa altos [en línea] <http://www.virtual.unal.edu.co/cursos/ingenieria/2001603/lecciones/cap9/cap9lec4/cap9lec4.htm> [citado en mayo 13 de 2014] 76
UNIVERSIDAD NACIONAL DE COLOMBIA, Dirección nacional de innovación Académica, Circuitos
eléctricos II, Filtros pasa banda y corte de banda [en línea] <http://www.virtual.unal.edu.co/cursos/ingenieria/2001603/lecciones/cap9/cap9lec4/cap9lec4.htm> [citado en mayo 13 de 2014] 77
Ibíd.

57
3. ELECCIÓN DEL SOFTWARE DE SIMULACIÓN Y DISEÑO
Como se puede ver en el capítulo Estado del Arte, la simulación es una herramienta complementaria al despliegue de una WSN. En otros casos debido al alto costo que generaría el desarrollo físico de una red, sirve como herramienta para la realización de pruebas virtuales, que pueden facilitar la comprensión de diversos escenarios de aplicación con los diferentes dispositivos disponibles. Existen gran variedad de plataformas, que permiten realizar trabajos de simulación sobre WSN, sin embargo en el contexto de diseño de arquitectura de software, dos de los proyectos para llevar a cabo simulaciones más completas son COOJA y OMNET++. Estos permiten trabajar sobre WSN y sobre el nuevo enfoque 6LowPan. Se trabajó con ambos software, realizando diferentes pruebas de simulación, con Cooja, se analizó la conexión de sensores bajo enfoques de IPv6, mientras que con Omnet++, se realizó la simulación de un escenario para el monitoreo del estado de la malla vial de un sector de Bogotá. Gracias a los ITS y a la integración con nuevos enfoques tecnológicos, como IoT, en grandes ciudades a nivel mundial, se ha generado un tráfico más seguro, amigable con el medio ambiente, eficiente, entre otros. Se propone realizar una simulación que sirva como base para generar, un sistema para el monitoreo en tiempo real de la malla vial de la ciudad. En base a las características expuestas, se puede establecer a Omnet++, como la opción más indicada para cumplir los objetivos de este proyecto, ya que es una herramienta de simulación apropiada para el estudio de nuevas necesidades, relacionadas con WSN, comunicaciones móviles, transmisión de información, entre otros aspectos. En el siguiente apartado, se detallara el diseño que se simulara en Omnet++, de un sector de la ciudad de Bogotá. 3.1 DISEÑO La figura 9, muestra el diseño del escenario simulado. Para el trabajo realizado, se propone, ejecutar el desplazamiento con dos vehículos realizando los recorridos respectivos para identificar los huecos sobre las diferentes calles del sector definido, identificando los huecos y capturando sus respectivas coordenadas, para ser mostradas en un escenario de resultados que será entregado a los entes encargados del mantenimiento vial.

58
Figura 9. Escenario simulado
Fuente: Los Autores.
Como se expuso anteriormente, Omnet++, permite adicionar módulos existentes, para realizar simulaciones, no solo sobre redes de sensores, sino sobre cualquier aplicación o enfoque que se pretenda dar. 3.2 ARQUITECTURA DEL SISTEMA La arquitectura diseñada para el escenario de simulación planteado en Omnet++, está compuesta por los módulos de integración con la plataforma Google Earth, que permite generar un sistema de reportes aparte del escenario de identificación. El segundo módulo, permite hacer el recorrido de los vehículos desplegados en el escenario, el tercer módulo permite identificar los huecos en las vías, a medida que el vehículo realiza su recorrido. El cuarto modulo, permite identificar los problemas y les asigna un color de acuerdo a la categorización realizada y el ultimo modulo genera un escenario de reporte, para ser entregado a las autoridades para abordar los puntos con priorización. Los subsistemas que conforman el escenario de simulación, están definidos de la siguiente manera:

59
Figura 10. Arquitectura del Escenario de simulación
Fuente: Los Autores
3.2.1 Subsistema de integración con Google Earth. El objetivo principal de este subsistema, es permitir graficar el recorrido que realiza el vehículo, en el escenario de simulación así como de permitir dar un reporte a la administración distrital, para tener un plan para tapar los huecos. Este subsistema está relacionado, con la integración de Omnet++ y Google Earth. 3.2.2 Subsistema de recorrido de los vehículos. El subsistema de recorrido de los vehículos, permite que los vehículos establecidos en el escenario de simulación, puedan realizar el recorrido definido para identificar los huecos. 3.2.3 Subsistema Identificar huecos. Este subsistema, permite que a través del recorrido realizado por los vehículos, identificar los huecos en las diferentes vías, que fueron tenidas en cuenta para el caso de estudio. El vehículo realiza su recorrido en el escenario, identificando los huecos y reportándolos. 3.2.4 Subsistema categorización de los huecos. El subsistema permite a través del recorrido que realizan los dos autos, identificar los huecos por las vías, marcándolos en la ruta. Cabe anotar que para este escenario de simulación, el programa únicamente marca los huecos, en el escenario que se entrega como resultado a un ente encargado de la administración de la malla vial, se da con el api de Google Maps.

60
3.2.5 Subsistema generación reportes. El ultimo subsistema planteado para el escenario de simulación que se realizó, presenta los resultados que se le entregan a un ente encargado de realizar todos los procesos para la rehabilitación y mantenimiento de la malla vial. Este subsistema muestra los resultados de la simulación hecha en Omnet++ y que son pintados en Google Maps con el Api. 3.3 ESPECIFICACIÓN DE REQUERIMIENTOS El escenario de simulación, cuenta con características funcionales, que permiten realizar de manera adecuada y otras características de carácter no funcional, que son encargadas de brindar calidad al escenario. 3.3.1 Requerimientos funcionales. Además de presentar la arquitectura, el sistema planteado presenta los siguientes requerimientos funcionales: Tabla 10. Requerimientos Funcionales
Requerimiento Descripción
Dibujar vehículos El sistema contará con un submodulo que permite plasmar los vehículos que realizaran los recorridos
Realizar recorridos El sistema permitirá graficar los recorridos de los vehículos, asignando un color a los recorridos de cada vehículo.
Integración con Google Earth
El sistema contara con un módulo de integración con Google Earth para graficar los recorridos e identificar los huecos.
Exportación de resultados
El sistema para exportar los resultados, genera un archivo XML que será integrado con el API de Google Maps, para mostrar resultados
Fuente: Los Autores
3.3.2 Requerimientos no funcionales. Los requerimientos no funcionales, que fueron tenidos en cuenta para el desarrollo del escenario de simulación, son los siguientes:
Extensibilidad: El sistema permitirá adicionar nuevas funcionalidades en el futuro, además de modificar o eliminar las ya existentes, de acuerdo a las solicitudes que sean necesarias.
Comprobabilidad: El escenario de simulación planteado, permite ser trabajado sobre otro sector de la ciudad, así como sobre otras ciudades. De igual forma permite enfocar la simulación hacia otras áreas.
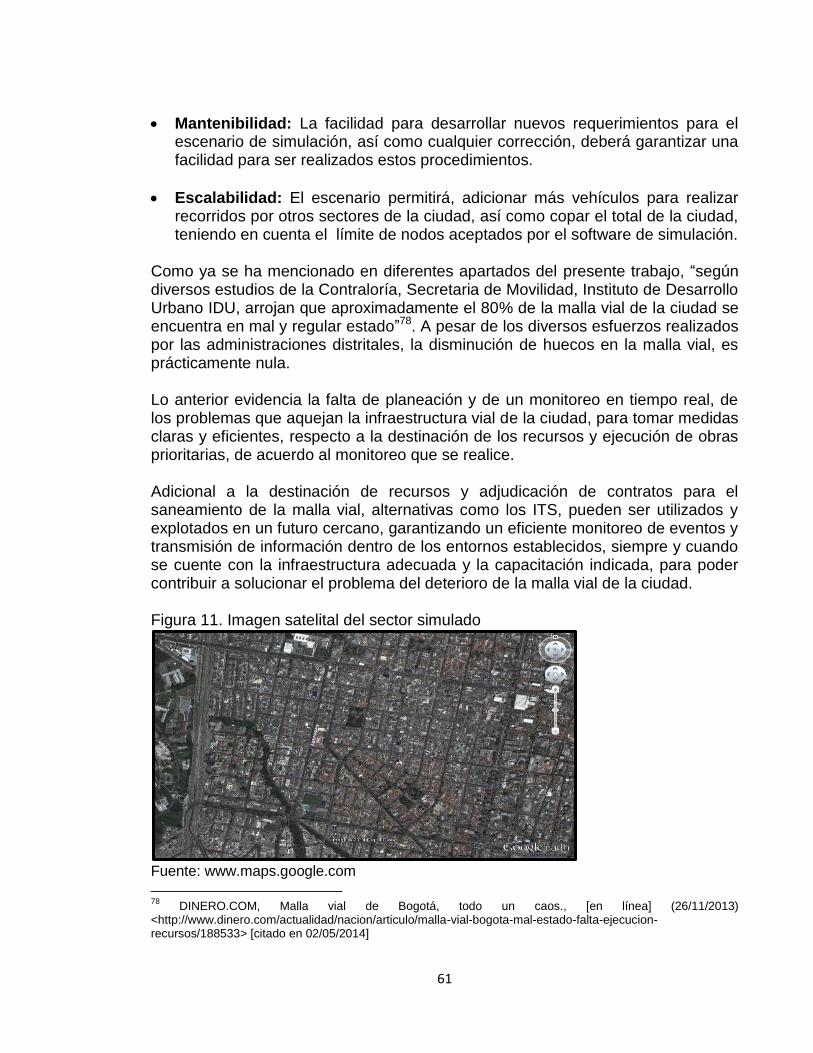
61
Mantenibilidad: La facilidad para desarrollar nuevos requerimientos para el escenario de simulación, así como cualquier corrección, deberá garantizar una facilidad para ser realizados estos procedimientos.
Escalabilidad: El escenario permitirá, adicionar más vehículos para realizar recorridos por otros sectores de la ciudad, así como copar el total de la ciudad, teniendo en cuenta el límite de nodos aceptados por el software de simulación.
Como ya se ha mencionado en diferentes apartados del presente trabajo, “según diversos estudios de la Contraloría, Secretaria de Movilidad, Instituto de Desarrollo Urbano IDU, arrojan que aproximadamente el 80% de la malla vial de la ciudad se encuentra en mal y regular estado”78. A pesar de los diversos esfuerzos realizados por las administraciones distritales, la disminución de huecos en la malla vial, es prácticamente nula. Lo anterior evidencia la falta de planeación y de un monitoreo en tiempo real, de los problemas que aquejan la infraestructura vial de la ciudad, para tomar medidas claras y eficientes, respecto a la destinación de los recursos y ejecución de obras prioritarias, de acuerdo al monitoreo que se realice. Adicional a la destinación de recursos y adjudicación de contratos para el saneamiento de la malla vial, alternativas como los ITS, pueden ser utilizados y explotados en un futuro cercano, garantizando un eficiente monitoreo de eventos y transmisión de información dentro de los entornos establecidos, siempre y cuando se cuente con la infraestructura adecuada y la capacitación indicada, para poder contribuir a solucionar el problema del deterioro de la malla vial de la ciudad. Figura 11. Imagen satelital del sector simulado
Fuente: www.maps.google.com
78
DINERO.COM, Malla vial de Bogotá, todo un caos., [en línea] (26/11/2013) <http://www.dinero.com/actualidad/nacion/articulo/malla-vial-bogota-mal-estado-falta-ejecucion-recursos/188533> [citado en 02/05/2014]

62
El escenario de simulación, se diseñó con Omnet++, que permite para este caso, mediante un modelo integrado con Google Earth, agregar la imagen de fondo con sus respectivas coordenadas (ver figura 13). La simulación, permite monitorear en tiempo real, el estado de la malla vial del sector elegido, por ejemplo, cuando el vehículo pasa por un hueco, deja el rastro, para llevar registro. El radio de transmisión, que ofrece este ejemplo de simulación es de 20 m, aunque, en un despliegue físico dependerá exclusivamente de las características que el fabricante ofrezca, con sus diferentes sensores. Se definieron, puntos donde existen huecos, de tal manera, que cuando el vehículo, pasa por estos sitios, reporta en tiempo real, la existencia de una afectación en la malla vial. Esta simulación, permite experimentar nuevas alternativas muy similares a un despliegue real, para ver la eficacia de un posible despliegue de sensores, para el monitoreo, en comparación con los métodos ineficaces y rudimentarios con los que se cuentan actualmente, para arreglar las vías. Para tener una visión más acertada, sobre el diseño del escenario realizado, a continuación se presenta la topología, que se adapta mejor a la simulación que se realizó. En la figura se puede observar un objeto (vehículo), que tiene adaptado un acelerómetro y un GPS, trasmitiendo información, que llega al Gateway, posteriormente pasa por un proceso de encapsulamiento en el Tunneling, para ser transmitida a internet, y es almacenada en las bases de datos dispuestos por la entidad que utilizan los dispositivos, para que el administrador pueda realizar consultas sobre los datos recibidos. Figura 12. Imagen de las vías del sector simulado
Fuente: www.maps.google.com

63
Figura 13. Modelo de Omnet++ integrado con Google Earth, configurado para un sector de Bogotá
Fuente: Los Autores.
Dentro de los errores que más se obtuvieron a la hora de realizar la simulación, se encuentra la exactitud con que es identificado un hueco en las vías, así como la limitante de nodos que pueden ser agregados al escenario de simulación.

64
4. ANÁLISIS DE RESULTADOS
En este apartado, se exponen los resultados obtenidos en el proceso de simulación realizado en Cooja, Omnet++ y la integración con Google Earth. 4.1 SIMULACIÓN 6LOWPAN Para trabajar WSN, sobre el enfoque 6LowPan, se utilizó el software de simulación Cooja, que permitió, establecer la conexión entre los nodos para la transmisión de paquetes de datos (ver Figura 14). Figura 14. Simulación en Cooja, bajo enfoque 6LowPan
Fuente: Los Autores.
Adicionalmente, el software de simulación permite asignar una dirección Ipv6 a los nodos y de esta modo lograr la transmisión de datos entre ellos. En la figura 16, se observan las líneas de tiempo, que representan la conexión y la transmisión de información entre los nodos.
65
Figura 15. Estado de transmisión de paquetes en cooja
Fuente: Los Autores.
Los resultados arrojados en el escenario de simulación, serán descritos en los siguientes apartados. 4.2 RECORRIDO REALIZADO POR VEHÍCULOS Este resultado, está relacionado con los recorridos efectuados por los dos vehículos que se plantearon para este escenario de simulación. Para realizarlos, se utilizaron coordenadas, los automotores realizaban los desplazamientos, arrojando como resultado en el escenario planteado, el recorrido que se definió, por medio del cual se identificaban los huecos. La figura 16 muestra el recorrido de los vehículos que se definieron para el escenario de simulación
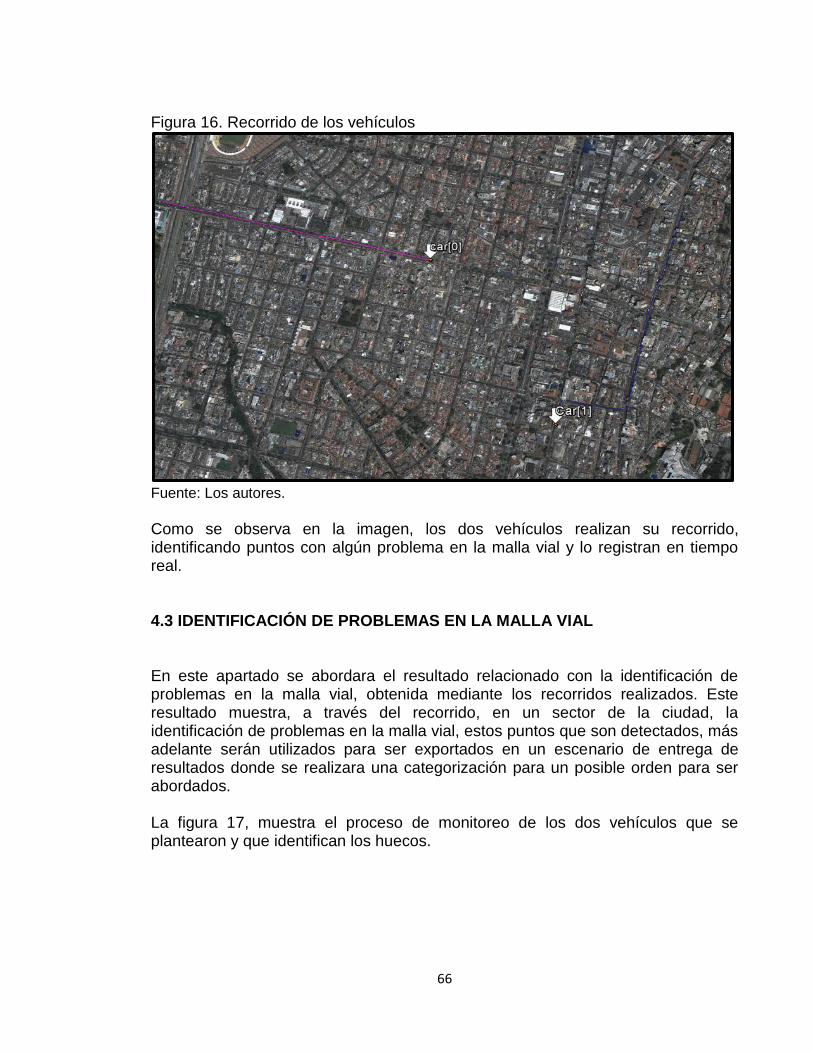
66
Figura 16. Recorrido de los vehículos
Fuente: Los autores.
Como se observa en la imagen, los dos vehículos realizan su recorrido, identificando puntos con algún problema en la malla vial y lo registran en tiempo real. 4.3 IDENTIFICACIÓN DE PROBLEMAS EN LA MALLA VIAL En este apartado se abordara el resultado relacionado con la identificación de problemas en la malla vial, obtenida mediante los recorridos realizados. Este resultado muestra, a través del recorrido, en un sector de la ciudad, la identificación de problemas en la malla vial, estos puntos que son detectados, más adelante serán utilizados para ser exportados en un escenario de entrega de resultados donde se realizara una categorización para un posible orden para ser abordados. La figura 17, muestra el proceso de monitoreo de los dos vehículos que se plantearon y que identifican los huecos.
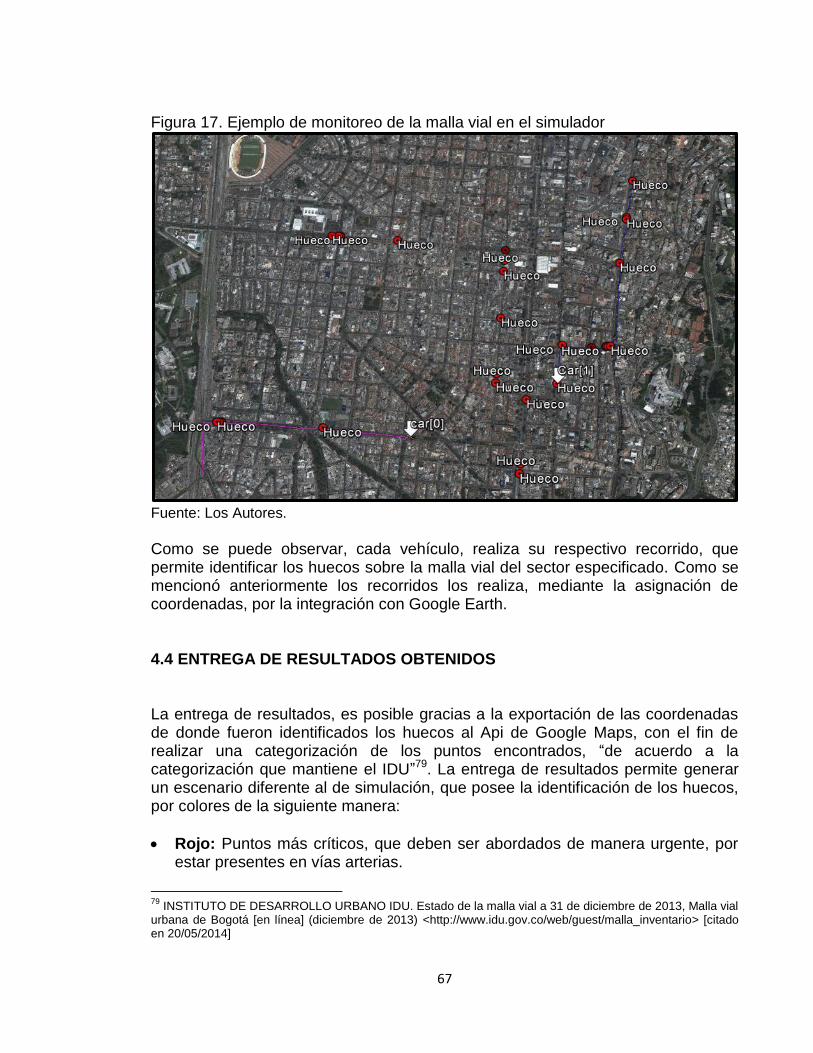
67
Figura 17. Ejemplo de monitoreo de la malla vial en el simulador
Fuente: Los Autores.
Como se puede observar, cada vehículo, realiza su respectivo recorrido, que permite identificar los huecos sobre la malla vial del sector especificado. Como se mencionó anteriormente los recorridos los realiza, mediante la asignación de coordenadas, por la integración con Google Earth. 4.4 ENTREGA DE RESULTADOS OBTENIDOS La entrega de resultados, es posible gracias a la exportación de las coordenadas de donde fueron identificados los huecos al Api de Google Maps, con el fin de realizar una categorización de los puntos encontrados, “de acuerdo a la categorización que mantiene el IDU”79. La entrega de resultados permite generar un escenario diferente al de simulación, que posee la identificación de los huecos, por colores de la siguiente manera:
Rojo: Puntos más críticos, que deben ser abordados de manera urgente, por estar presentes en vías arterias.
79
INSTITUTO DE DESARROLLO URBANO IDU. Estado de la malla vial a 31 de diciembre de 2013, Malla vial urbana de Bogotá [en línea] (diciembre de 2013) <http://www.idu.gov.co/web/guest/malla_inventario> [citado en 20/05/2014]

68
Amarillo: Puntos críticos que se deben abordar en segunda instancia, por estar presentes en vías intermedias o por ser daños menores en vías arterias.
Verde: Puntos críticos que deben ser abordados en tercera instancia, ya que están presentes en vías locales o son daños menores en vías intermedias.
La figura 18, muestra la identificación de los daños encontrados, para ser entregadas como escenario de resultados. Figura 18. Escenario de entrega de resultados
Fuente: Los Autores.
4.5 DISMINUCIÓN EN TIEMPOS DE PROCESOS En este apartado, teniendo en cuenta los valores que maneja el IDU, para los procesos de licitaciones y solución de problemas en la malla vial y que fueron mencionados en el estado del arte, se tendrán en cuenta para elaborar resultados de carácter hipotético en la comparación de tiempos para realizar el mantenimiento de las vías.

69
Para este proceso se realizan diferentes comparaciones entre la forma actual para la reparación de la malla vial y como se realizaría con la implementación hipotética de la red de acelerómetros. Con el despliegue de la red de acelerómetros este proceso es reducido a unos cuantos segundos, ya que el reporte es almacenado en la base de datos tan pronto como es captado por uno o varios nodos. Teniendo como base, los tiempos aproximados que son tenidos en cuenta, después de identificar el daño en la vía para poder intervenirla. Se toma para este trabajo de estudio, el mejor de los casos cuando todos los procesos se hacen en el menor tiempo estimado y el peor de los casos cuando los procesos se hacen en el mayor tiempo estimado, realizando una comparación entre los lapsos de un proceso realizado actualmente y un posible escenario de red de acelerómetros, para los procesos de acciones de movilidad, cambio de carpeta asfáltica y reconstrucción total de la vía. 4.5.1 Duración en las acciones de movilidad. En este caso, después de identificar la gravedad del daño presentado y de realizar el proceso de gestión, el arreglo consiste solo en sellar fisuras o tapar pequeños huecos, el procedimiento de acciones de movilidad tarda 20 minutos aproximadamente. La tabla 11, muestra la comparación respectiva. Tabla 11. Reducción de acciones de movilidad
Sin Red Acelerómetros(Días)
Con Red Acelerómetros(Días)
Mejor de los casos
224 105
Peor de los casos
589 135
Fuente: Los Autores
Se puede ver en la figura 19, que la reducción del tiempo del proceso desde la identificación del problema en la malla vial, hasta las acciones de movilidad, con la implementación de la red de acelerómetros es forma notable, tanto que en el peor de los casos, el tiempo se reduce casi a ¼ de lo que tarda sin la red.

70
Figura 19. Comparación de acciones de movilidad sin acelerómetros y con acelerómetros
Fuente: Los autores
4.5.2 Duración cambio de la carpeta asfáltica de la vía. En el caso de requerir cambios en la carpeta asfáltica, el proceso es más complejo en comparación con el anteriormente expuesto, llegando a requerir de 8 a 10 días adicionales aproximadamente sin un despliegue de acelerómetros, mientras que con una red de acelerómetros los tiempos disminuyen considerablemente (ver figura 20). Tabla 12. Comparación cambio de carpeta asfáltica
Sin Red Acelerómetros(Días) Con Red Acelerómetros(Días)
Mejor de los casos
232 113
Peor de los casos
599 145
Fuente: Los autores

71
Figura 20. Comparación cambio carpeta asfáltica
Fuente: Los Autores
4.5.3 Duración en la reconstrucción de la vía. Cuando los daños en la vía son críticos, es necesario realizar la reconstrucción de la vía. Este tipo de procedimientos tiende a durar un mayor tiempo con relación a los dos anteriores (ver tabla 13). Tabla 13. Comparación de reconstrucción de la vía
Sin Red Acelerómetros(Días) Con Red Acelerómetros(Días)
Mejor de los casos
244 125
Peor de los casos 619 165
Fuente: Los autores
Aunque los tiempos aumentan por la dificultad del arreglo, sigue siendo notoria la gran diferencia entre los procesos de acciones de movilidad y cambio de capa asfáltica, sin la red de acelerómetros y la duración de procesos con la red de acelerómetros desplegada (Ver figura 21).

72
Figura 21. Comparativa en tiempos para reconstruir la vía
Fuente: Los autores
A pesar de que el tiempo de ejecución de procesos para intervenir la malla vial reduciría notablemente, este seguiría siendo alto, debido a la cantidad de procesos que deben realizarse. Sin embargo con una buena implementación y administración de la red de acelerómetros, sería posible llegar a reducir no solo estos tiempos si no también los costos.

73
5. CONCLUSIONES
El presente trabajo, sobre IoT e ITS, muestra los beneficios al implementar sistemas como estos, el proyecto realizado, permitió identificar las ventajas de realizar escenarios de simulación, para sustentar la viabilidad de nuevas ideas, investigaciones, trabajos científicos, etc. Para realizar el escenario de simulación, fue necesario, investigar sobre los diversos software de simulación de WSN, así como de sistemas operativos enfocados a la programación de los nodos. Dejando las bases para un posible despliegue físico, en un lapso de tiempo corto. La simulación en COOJA, facilitó el trabajo sobre WSN, permitiendo la transmisión de datos entre los nodos pertenecientes a dicha red. Adicionalmente cada nodo, poseía su respectiva IP, bajo el nuevo protocolo IPv6. La simulación realizada, en un sector de la ciudad de Bogotá, fue realizada sobre Omnet++, que permitió validar la comparación, de los procesos para identificar problemas en la malla vial, dejando como resultado, que mientras se realiza el proceso actual, que demora de uno a dos años, con la red de acelerómetros, el registro es realizado en segundos. Esto evidencia, la ventaja de desplegar sensores, ya que identifica los puntos más críticos, permitiendo dar solución de acuerdo a priorizaciones. Se realizó un estudio detallado de IoT y de los avances a nivel mundial de los ITS. Se mencionaron trabajos realizados bajos estos enfoques, para el mantenimiento adecuado de la infraestructura vial, así como de otras ventajas que ofrecen los ITS. También se identificaron, diferentes aplicaciones de IoT, para mejorar la calidad del transporte, garantizando su auto sostenibilidad. Se determinaron los beneficios más importantes, de los ITS, que están encaminados principalmente en mejorar, las condiciones con las que se ofrece el transporte, sus medios, infraestructura, medio ambiente, entre otros, además de beneficiar a los usuarios. Además de los ITS, gracias a los nuevos enfoques, por ejemplo, IoT, es posible conectar cualquier dispositivo a la red para transmitir información, generando, mayor automatización de los procesos, facilitación de ayudas a usuarios y conductores y la optimización de vehículos. Es evidente que dentro de la continua evolución y búsqueda de mejores alternativas, para acceder a la información, que haga la vida más fácil a las personas, se encuentra IoT, esto conlleva al acceso de mucha más información con mejor calidad, de eventos que hasta hace poco eran desconocidos. IoT, representa la revolución de todas las cosas como se conocen actualmente. Por tal motivo, es importante que Colombia, dedique recursos, esfuerzos, investigación, para obtener de forma adecuada todos los beneficios que ofrecen los nuevos enfoques tecnológicos, para mejorar la calidad del transporte en la nación y así
74
mismo la calidad de vida de los ciudadanos. El desarrollo de un escenario de simulación en los ámbitos IoT e ITS, permitió determinar que los acelerómetros son dispositivos, que determinan cambios, gracias a esto se pueden medir distintas variaciones para el monitoreo de la malla vial. Se realizó el diseño de un sistema que permite dar respuestas rápidas, sobre cómo deben ser abordados los problemas identificados en la malla vial. Se evidenció una fuerte relación entre IoT e ITS, siendo aliados en un futuro despliegue de aplicaciones conjuntas. Finalmente, después de recapitular, todo el trabajo investigativo sobre el enfoque IoT, sus protocolos, plataformas, software de simulación, además de los ITS, que gracias a la simulación realizada, se puede aplicar los conocimientos de última generación, para desarrollar sistemas inteligentes que mejoren la calidad del transporte en Bogotá así como de la infraestructura existente. Con la implementación, se puede pensar en reducir gastos innecesarios, sobre estudios y licitaciones para determinar el verdadero estado de la malla vial.

75
BIBLIOGRAFÍA 5HERTZ TUTORIALES, ABC del acelerómetro [en línea] (17/02/2014) <http://5hertz.com/tutoriales/?p=228> [citado en mayo 30 de 2014] ALCALDIA DE MEDELLIN. Sistema Integral de Movilidad. (en línea) [2010] <http://www.medellin.gov.co/transito/sistema_inteligente_movilidad.html#> [citado en 06/02/2014] ATMEL, AVRSBIN2., [en línea] <http://www.atmel.com/tools/AVRSBIN2.aspx?tab=overview> [citado en abril 23 de 2014] ATMEL, AVR4018: Inertial Two (ATAVRSBIN2) Hardware., [en línea] (enero de 2011) < http://www.atmel.com/Images/doc8369.pdf> [citado en abril 23 de 2014] ATMEL, Atmel Licenses Sensinode's 6LoWPAN Software Stack for Use in Ultra-Low Power Wireless Hardware Platforms., [en línea] (junio 5 de 2013) < http://ir.atmel.com/releasedetail.cfm?ReleaseID=769304> [citado en abril 23 de 2014] CISCO SYSTEMS INC., EVANS, Dave., Internet de las cosas Como la próxima evolución de Internet lo cambia todo. [en línea] (Abril de 2011) < http://www.cisco.com/web/LA/soluciones/executive/assets/pdf/internet-of-things-iot-ibsg.pdf> [citado en 01/02/2014]
DE ROUX, Carlos Vicente., El Sistema Inteligente de Transporte le quedó grande a la ETB. [En línea] (24/10/2013) <http://concejodebogota.gov.co/el-sistema-inteligente-de-transporte-le-quedo-grande-a-la-etb-concejal-de-roux/cbogota/2013-10-24/111205.php> [citado en 06/02/2014] DIAZ, Soledad. Wireless Sensor Networks. [en línea] < http://www.arcos.inf.uc3m.es/~sescolar/index_files/presentacion/wsn.pdf> [citado en abril 23 de 2014] FERRARI, German, et al., “Sistemas embebidos para tiempo real”, [en línea] (2010) <https://eva.fing.edu.uy/file.php/581/proyectos/2010/DataloggerContiki/DataloggerContiki.pdf > [citado en abril 21 de 2014] DINERO.COM, Malla vial de Bogotá, todo un caos., [en línea] (26/11/2013) <http://www.dinero.com/actualidad/nacion/articulo/malla-vial-bogota-mal-estado-falta-ejecucion-recursos/188533> [citado en 03/02/2014]
76
EL TIEMPO. GUALDRÓN, Yeison. Así es la lucha de los paisas para no tener huecos en vías de Medellín. [en línea] (02/12/2013) <http://www.eltiempo.com/colombia/medellin/ARTICULO-WEB-NEW_NOTA_INTERIOR-13248256.html> [citado en 04/02/2014] EL TIEMPO. Redacción Bogotá. Huecos en las vías de Bogotá han causado 3 muertes. [en línea] (16/02/14) <http://www.eltiempo.com/colombia/bogota/ARTICULO-WEB-NEW_NOTA_INTERIOR-13511381.html> [citado en 29/03/2014] EL UNIVERSAL, Solo el 8.5% de la red vial en Colombia está pavimentada. [En línea] (09/10/2011) <http://www.eluniversal.com.co/cartagena/nacional/solo-el-85-de-la-red-vial-en-colombia-esta-pavimentada-47681> [citado en 01/04/2014] EUROPEAN COMMISSION MOBILITY AND TRANSPORT., Intelligent transport systems. [en línea] (15/05/2013) <http://ec.europa.eu/transport/themes/its/index_en.htm> [citado en 05/02/2014] IBM, Mote Runner., [en línea] (octubre de 2013) <http://www.zurich.ibm.com/moterunner/> [citado en 23 de abril de 2014] INFORMATION SCIENCE INSTITUTE. The network simulator ns-2. [en línea] <http://www.isi.edu/nsnam/ns/> [citado en abril 21 de 2014] Infrastructures: A Billion Dollar Business Opportunity. [en línea] (11/01/2013) <http://www.libelium.com/smart_roads_wsn_smart_infrastructures/> [citado 06/02/2014] Internet of Thing: A RFID Temperature Smartsensor. Odunmbaku Abdulakeem. [Citado en 14/03/2013]. Disponible en internet: <https://www.theseus.fi/bitstream/handle/10024/47230/Odunmbaku_Abdulakeem.pdf?sequence=1> ITS COLOMBIA., ITS para Transparencia, Eficiencia y Sostenibilidad de los Sistemas de Movilidad. [en línea] (Diciembre de 2012) <http://www.its-colombia.org/> [citado en 04/02/2014] KUGLER, Patrick, NORDHUS, et al., Shimmer, cooja and contiki: a new toolset for the simulation of on the one-node signal processing algorithms [en linea] (6 de mayo de 2013). < http://www.deepdyve.com/lp/institute-of-electrical-and-electronics-engineers/shimmer-cooja-and-contiki-a-new-toolset-for-the-simulation-of-on-node-b5RWSJ0JEq > LARA, Érica. Fundamentos de investigación. 1 ed. Ciudad de México: Alfaomega, 2011. 292 p.
77
LIBELIUM, BIELSA, Alberto. Detecting Radiation Levels in Fukushima: an example of crowsourcing [en línea] (22/02/2013) <http://www.libelium.com/fukushima_crowdsourcing_radiation_social_project/> [citado 05/02/2014] LIBELIUM, BIELSA, Alberto. Smart City Project in Serbia for environmental monitoring by Public Transportation. [en línea] (12/01/2012) <http://www.libelium.com/smart_city_environmental_parameters_public_transportation_waspmote/> [citado 05/02/2014] LIBELIUM, WaspMote., [en línea] <http://www.libelium.com/es/products/waspmote/> [citado en 23 de abril de 2014] LIBELIUM, Waspmote Mote Runner: 6LowPan Development Platform., [en línea]. <http://www.libelium.com/en/products/waspmote-mote-runner-6lowpan/> [citado en 07/02/2014] LIBELIUM, WaspMote Technical Overview., [en línea] <http://www.libelium.com/es/products/waspmote/hardware/> [citado en 23 de abril de 2014] MICROSOFT, Características de IPv6 [en línea] (Enero de 2005) <http://technet.microsoft.com/es-es/library/cc780593(v=ws.10).aspx> [citado en 04/02/2014] MINISTERIO DE TECNOLOGÍAS DE LA INFORMACIÓN Y LAS TELECOMUNICACIONES [en línea] (2011) <http://www.mintic.gov.co/index.php/mn-news/197-20110624> [citado en 04/02/2014] NATIONAL INSTRUMENTS., ¿Que es una red de sensores inalámbricos?, [en línea] (22/04/2009) <http://www.ni.com/white-paper/7142/es/> [citado en 05/02/2014] NETDUINO, Getting Started., [en línea] (Agosto 1 de 2010) <http://netduino.com/downloads/gettingstarted.pdf> [citado en abril 23 de 2014] NETDUINO, NetDuino Plus 2 Technical Specifications [en línea] <http://netduino.com/netduinoplus2/specs.htm> [citado en abril 23 de 2014] OMER, Muhammad, KUNZ, Thomas. Operating Systems for Wireless Sensor Networks: A Survey. [en línea] (31 de mayo de 2011) < http://www.mdpi.com/1424-8220/11/6/5900> [citado en abril 23 de 2014]
78
OMNET++. Welcome to Omnet++ Community [en línea] (2013) <http://www.omnetpp.org/> [citado en abril 22 de 2014] OREGON DEPARTMENT OF TRANSPORTATION, Intelligent Transportation Systems (ITS): Case Studies Demonstrating the Benefits of ITS [en línea]. <http://www.oregon.gov/ODOT/HWY/ITS/Pages/its_benefits.aspx> [citado en 03/02/2014] ORTIZ, Antonio. Técnicas de enrutamiento inteligente para redes de sensores inalámbricas. Tesis Doctoral. Albacete.: Universidad de Castilla-La Mancha. Departamento de sistemas informáticos, 2011. P 19 - 20 PERERA, Charit. ZASLAVSKY, Arkady., CHRISTEN, Peter., GEORGAKOPOULOS, Dimitrios., Context Aware Computing for The Internet of Things: A Survey. En: IEEE Xplore [en línea] (26 de noviembre de 2013). [citado en 04/02/2014]. ISSN 1530-437X RASPBERRY PI, Documentation Raspbian [en línea] <http://www.raspberrypi.org/documentation/raspbian/README.md [citado en abril 23 de 2014] RASPBERRY PI, What is a RaspBerry Pi?., [en línea] <http://www.raspberrypi.org/help/what-is-a-raspberry-pi/> [citado en abril 23 de 2014 RAYTHEON BBN TECHNOLOGIES, The Arpanet Forerunner of Today‟s Internet, [en línea], disponible: en < http://www.bbn.com/about/timeline/arpanet> [citado abril 16 de 2014] Redes de sensores inalámbricos. Serna Jesús. Bruselas. GS1 [citado en 22/03/2013]. Disponible en internet: http://www.uv.es/~montanan/ampliacion/trabajos/Redes%20de%20Sensores.pdf RODRIGUEZ, Jean Paul., The geography of transport systems: Urban transport problems. New York: Routledge., 2013. 416 p (Third Edition: 3). ISBN 978-0-415-82254-1 SEGUI, Joana, MARTINEZ, María., Los sistemas Inteligentes de transporte y sus efectos en la movilidad urbana e interurbana. [en línea] (Agosto de 2004) <http://www.ub.edu/geocrit/sn/sn-170-60.htm> [citado en abril 21 de 2014] SINC, La empresa zaragozana Libelium lanza con IBM un kit para el internet de las cosas., [en línea] (21 de octubre de 2013),<http://www.agenciasinc.es/Noticias/La-empresa-zaragozana-Libelium-lanza-con-IBM-un-kit-para-el-internet-de-las-cosas> [citado en 23 de abril de 2014]

79
Texas Instruments. RFID. [citado en 18/03/2013]. Disponible en internet: http://www.ti.com/lsds/ti/wireless_connectivity/nfc_rfid/overview.page The Global Language of business. EPC. Bruselas. GS1 [citado en 12/03/2013]. Disponible en internet: <http://www.gs1.org/gsmp/kc/epcglobal> TINYOS. Tossim [en línea] (10 de mayo de 2013) <http://tinyos.stanford.edu/tinyos-wiki/index.php/TOSSIM> [citado en 22 de abril de 2014]