sesiÓn de repaso de redes de petri primer … · arcos de p1 (materia prima) a t1 y t2 y de t1 a...
TRANSCRIPT

SESIÓN DE REPASO DE SESIÓN DE REPASO DE
REDES DE PETRIREDES DE PETRI
PRIMER SEMESTRE 2011PRIMER SEMESTRE 2011UPIITA-IPNUPIITA-IPN
REDES DE PETRI
Las PN son consideradas una herramienta para el estudio de los sistemas. Con su ayuda podemos modelar el comportamiento y la estructura de un sistema, y llevar el modelo a condiciones límite, que en un sistema real son difíciles de lograr o muy costosas.
La teoría de PN ha llegado a ser reconocida como una metodología establecida en la literatura de la robótica para modelar los sistemas de manufactura flexibles.

Acciones(o plazas) y Estados
Las acciones o plazas nos conducen a un estado determinado del módulo en el tiempo, las acciones de un módulo en un sistema pueden ocurrir simultáneamente con las acciones de otros módulos, dado que ellos interactúan entre sí, es necesario sincronizar los eventos.

Eventos y Condiciones
Los eventos son las acciones que se dan en el sistema y nos llevan a un estado, podemos describir un estado como un conjunto de condiciones. Es útil, para nuestro caso, representar dichas condiciones por medio de predicados.
Para que cierto evento ocurra es necesario que ciertas condiciones se cumplan, estas son llamadas pre-condiciones del evento, la ocurrencia del evento nos puede llevar a otras condiciones y es entonces cuando se dan las post-condiciones.

Definición formal
La red de Petri es un tipo particular de grafo dirigido, junto con un estado inicial llamado el marcador inicial, M0. El grafo generado N de una red de Petri es dirigido, ponderado, bipartita que consiste de dos tipos de nodos, llamados Acciones y Estados, donde los arcos son ya sean de Plazas a transiciones o en sentido contrario.
En una representación gráfica, las acciones están representadas por círculos, las transiciones como barras o cajas. Los arcos están etiquetados con su peso, donde un arco-k ponderado puede ser interpretado como una serie de arcos paralelos k.

Un (estado) marcado asigna a cada acción un entero no negativo. Si un marcado asigna a una acción p un entero no negativo k, decimos que p está marcado con k tokens. Visualmente, ponemos puntos negros (tokens) en donde está p. Un marcado es denotado por M, un vector m-dimensional , donde m es el número total de acciones. El componente p de M se denota como M(p), es el número de tokens en la acción p.
En modelación, cuando el concepto de condiciones y eventos, las acciones representan condiciones, y transiciones representan eventos.

Una transición (un evento) tiene cierto número de acciones de entrada y salida, representando las condiciones pre- y post- del evento, respectivamente.
La presencia de un token en una acción es interpretada como un sostén de verdad de la condición asociada con la acción. Otra interpretación es que k tokens son colocados en una acción para indicar que los elementos de datos o recursos k están disponibles.

Interpretación de las transiciones y acciones
Acciones de entrada Transición Acciones de salida
Precondiciones evento postcondiciones
Datos e entrada Paso de computación Datos de salida
Señales de entrada Procesador de la señal Señales de salida
Recursos necesitados Tarea o trabajo Recursos liberados
condiciones Cláusula lógica conclusiones
buffers Procesador buffers
Representación de la red de Petri
En la representación de una red de Petri, se omiten los arcos valorados con 0, y el 1 en los arcos valorados con 1.Las plazas se representan mediante círculos, las transiciones mediante rectángulos horizontales o líneas horizontales, y las marcas mediante puntos en el interior de las plazas

Anatomía de una red de PetriLas RP se componen de cuatro partes:
Un conjunto de nodos o estados. Un conjunto de transiciones. Una función de entrada y Una función de salida.
Los símbolos redondos denotan estados (también llamados lugares o condiciones); las formas rectangulares denotan transiciones, T. Conectados por flechas las cuales muestran la dirección del flujo. Las actividades o transiciones están relacionadas con funciones de entrada y salida. Las marcas negras se mueven por la ocurrencia de las transiciones, describen el estado presente de las relaciones.

Definición Matemática
Una red de Petri es un conjunto formado por R={P, T, Pre, Post}
P: Conjunto de nodos o plazas de cardinal n.T: Conjunto de transiciones de cardinal m.
Pre: Aplicación de incidencia previa.Pre:{P x T} --> Naturales
Post: Aplicación de incidencia posterior. Post:{P x T} --> Naturales
Una PN es una tupla-5, PN = {P, T, F, W, M0}, donde
P = {p1, p2, ...,pm} es una serie finita de acciones.T = {t1, t2, ..., tn} es una serie finita de transiciones,F ⊆ (P x T) U (TxP) es una serie de arcos (relación de flujo)W: F {1,2,3,...}
M0: P {0,1,2,3,...} es el marcado inicialP ∩ T = ∅ y P ∪ T ≠ ∅
Una estructura de red de Petri N = (P, T, F, W) sin ningún marcado inicial se denota por N.
Una red de Petri con un marcado inicial dado está denotado por (N, M0)
Red marcada
Definición: Una red marcada es el conjunto formado por {R, M} donde:
R es una Red de Petri como la definida.M es una aplicación denominada marcado.
M: S -->NaturalesSe asocia a cada estado un número natural, denominado
marca. Las marcas para un estado se reunen en columnas.
Un token o marca es un concepto primitivo de la red, es un identificador dentro de un nodo y su número puede variar
entre nodos. El comportamiento dinámico de los tokens define el flujo de
información de la red

Reglas de disparo para una PN.La ejecución en una PN es controlada por el número y distribución de los tokens que tiene. Los tokens presentes en los nodos controlan la ejecución de las transiciones de la red. Una PN se activa disparando transiciones. Una transición es disparada removiendo tokens de los nodos de entrada y creando tokens de salida.
De aquí podemos obtener la primera condición de disparo en una transición: todos los nodos de entrada de la transición, deben tener al menos el mismo número de tokens, que de arcos que van hacia la transición, para que é sta sea disparada, cuando la transición cumpla esta condición se dice que es una transición ENABLED.

Ejemplo de una red de Petri
Sea una red de Petri con cinco estados (1..5) y cinco transiciones (a..e)
Pre a b c d e1 1 0 0 0 02 0 1 0 0 03 0 0 1 0 04 0 0 0 1 05 0 0 0 1 1
Post a b c d e1 0 0 0 1 02 1 0 0 0 03 1 0 0 0 14 0 1 0 0 05 0 0 1 0 0

Ejecución de la red
Número de marcas asociados a los nodos en el ejemplo es M0 el marcado definido por
columnas:
Definición: Una transición t es franqueable si para un marcado M se cumple:
M(s) >= Pre(s,t) ; (∀ s)
Mo
1
0
0
0
0

Representación del grafo de la red
F(1)={a}F(2) ={b}F(3) ={c}F(4)={d}
F(5) = {d,e}
F(a)={2,3}F(b)={4}F(c)={5}F(d)={1}F(e)={3}
Pre a b c d e
1 1 0 0 0 0
2 0 1 0 0 0
3 0 0 1 0 0
4 0 0 0 1 0
5 0 0 0 1 1
Post a b c d e
1 0 0 0 1 0
2 1 0 0 0 0
3 1 0 0 0 1
4 0 1 0 0 0
5 0 0 1 0 0

Ejecución de la red
M0 M1 M2 M3 M4
1 1 0 0 0 0
2 0 1 1 0 0
3 0 1 0 1 0
4 0 0 0 1 1
5 0 0 1 0 1

Modelando Redes de Petri

Un sistema de manufactura es diseñado para producir una parte final a partir de materia prima con operaciones realizadas por una fresa y un taladro como se muestra en la figura siguiente. Tres estaciones de inspección son usadas para detectar si la materia prima que llega es aceptable; y si el fresado y taladrado está dentro de las especificaciones. Si falla, entonces se elimina.

Para modelar el sistema como una red de petri, necesitamos establecer todos los estados posibles antes. Dibujamos un círculo por cada estado
Los estados son: materia prima, fresa, taladro, parte final, desecho.

Para los estados definidos, decidimos todos los eventos que pueden tomar lugar en cada estado. Entonces hacemos una transición por cada evento y enlazar las plazas.
Tomemos el ejemplo del estado 'Materia Prima'. En este estado, dos eventos pueden ocurrir: 'Comienza fresado' como resultado de un material aceptable, o 'Comienza desecho'. Dos transiciones t1 y t2 son creadas y se agregan los arcos de P1 (materia prima) a t1 y t2 y de t1 a p2 (fresa) y de t2 a p5 (desecho).

Continuamos el proceso hasta que todos los estados se consideran. La figura siguiente muestra el resultado final en la red de Petri.

La siguiente tabla muestra la interpretación de los estados/plazas y las transiciones.
Plazas Interpretación Transiciones Interpretación
p1 Materia prima t1 Comienza fresado
p2 Fresa t2 Comienza desecho de parte inaceptable
p3 Taladro t3 Comienza taladrado
p4 Parte final t4 Comienza desecho de parte de fresado erróneo
p5 Desecho t5 Completa el proceso de manufactura
t6 Comienza el desecho de parte mal taladrada

Marcamos P1 solo con un token para indicar el estado inicial del sistema.
Esta red es segura pero no viva por que no está fuertemente conectada. Los dos estados que llegan a un punto muerto son: 'Parte final' y 'desecho'.
Recordemos que la estructura de una plaza con dos o mas transiciones de salida se llama 'elección', conflicto' o 'decisión'. Tales estructuras exhiben un no determinismo. Cuando un token llega a estas estructuras pueden irse a cualquiera de las transiciones conectadas a la salida.
Las redes de Petri permiten una representación clara de esas elecciones. Sin embargo, no pueden modelar sincronización de actividades concurrentes o paralelas explícitamente.

Propiedades de las redes de Petri
Es una propiedad de comportamiento dado que depende de su marcado inicial. Una situación importante en el diseño de un sistema de manufactura es si el sistema puede alcanzar el estado especificado, o exhibir cierto comportamiento particular.
En general, la pregunta es si el sistema modelado con la red de Petri exhibe todas las propiedades deseadas, como se especifican en los requerimientos iniciales y no los indeseables.
Alcanzabilidad

Limitaciones y seguridad
Dada una red de Petri Z = (P, T, I, O, m0) y su Alcanzabilidad R, un estado es limitado si el número de marcas es menor que un número entero cualquier dentro de su Alcanzabilidad. Seguridad se refiere a que está limitado solo a 1-marca.

Conservación
Una red de Petri es conservativa con respecto a un vector w que pueda transformar el marcado m en el marcado original, w'm = w' m0
Vitalidad
Una transición t se dice viva si en algún marcado, hay una secuencia de transiciones cuyos disparos habilitan t. De igual manera, t está viva si hay una serie de marcados cuyas transiciones disparan una secuencia que incluye a t.
Una transición t está muerta si en un marcado m, no hay secuencia que incluya la habilitación de t a partir de m.

Punto Muerto
Hay un camino cerrado si la red de Petri contiene una m, en la cual ninguna transición sea habilitada. En manufactura, hay muchos ejemplos de recursos compartidos que pueden llevar a una situación de punto muerto. Hay cuatro condiciones que pueden llevar a un punto muerto:
1. Exclusión mutua. Un recurso es ya sea disponible o alcanzable por un proceso que tiene un acceso exclusivo a este recurso
2. Amarra y espera: Un proceso es permitido a mantener un recurso o recursos mientras está pidiendo más.
Punto Muerto
1. Sin anticipación: Un recurso o recursos dispuesto para un proceso no puede ser removido desde el proceso, hasta que sea liberado por el proceso en sí.
2. Espera circular: dos o mas procesos son arreglados en una cadena en la cual cada proceso espera por los recursos mantenidos por el siguiente proceso en la cadena.
Punto Muerto
Por ejemplo, en un sistema de manufactura flexible, un punto muerto ocurre cuando el buffer de entrada y salida de una herramienta de maquinado mantiene un pallet con productos ya maquinados, y otro pallet con productos a maquinar han sido entregados al buffer. Asumiendo que el buffer puede solo mantener un pallet por vez, se encuentra un punto muerto.

Reversibilidad y estado origen
Una red de Petri es reversible si para todos los marcados posibles, el marcado origen es aquel que corresponde a su estado inicial.
La red de Petri es reversible si hay un marcado inicial finito que hace que la red sea reversible. Esto es, que si es posible ir de m0 a m, también es posible ir de m a m0.
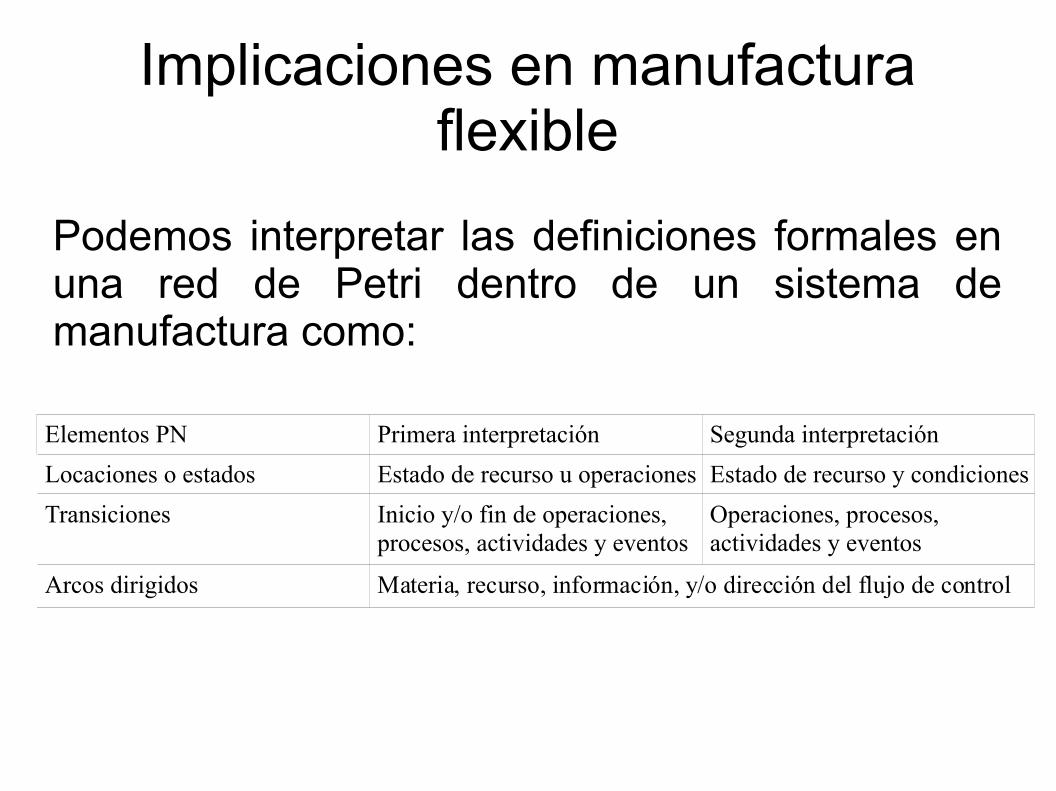
Implicaciones en manufactura flexible
Podemos interpretar las definiciones formales en una red de Petri dentro de un sistema de manufactura como:
Elementos PN Primera interpretación Segunda interpretación
Locaciones o estados Estado de recurso u operaciones Estado de recurso y condiciones
Transiciones Inicio y/o fin de operaciones,procesos, actividades y eventos
Operaciones, procesos,actividades y eventos
Arcos dirigidos Materia, recurso, información, y/o dirección del flujo de control

Convenciones de modelado con redes de Petri
Conceptos en manufactura Modelado en redes de Petri
Tamaño del lote de producción o en movimiento Peso de los arcos dirigidos que modelan el lotede producción o en movimiento
Número de recursos. Por ejemplo, VGAs,máquinas, estaciones de trabajo y robots
El número de tokens en estados modelandocantidad de recursos correspondientes
Capacidad de una estación de trabajo El número de tokens en estados modelando sudisponibilidad
Trabajo en proceso El número de tokens en estados modelando losbuffers y operaciones en todas las máquinas
Volumen de producción El número de tokens en estados modelando elcontador o el número de disparos de transicionesmodelando el fin de un producto
Tiempo de una operación. Por ejemplo,instalación, procesamiento y carga/descarga
Retardos en el tiempo asociados con el estado ola transición modelando la operación
Tiempo de transporte o movimiento Retardos en el tiempo asociados con el arcodirigido, el estado o la transición modelando eltransporte o movimiento de materiales
Estado del sistema El marcado de la red de Petri (más lainformación del tiempo para redes de Petritemporizadas)
Secuencia, concurrencia, conflictos,compartición de recursos, etc.
Módulos de la red de Petri diversos

Ejemplo
Consideremos el siguiente sistema: Un taller que tiene tres máquinas M1, M2, M3 y dos operadores O1 y O2. El operador O1 puede trabajar las máquinas M1 y M2 y el operador O2 las máquinas M1 y M3. Las órdenes requieren de dos procesos, el primer procesos debe ser hecho por la máquina M1 y el segundo proceso puede ser hecho con la máquina M2 y M3.


Las condiciones y eventos son:

A. Una orden ha llegado y está esperandoB. Una orden ha sido trabajada y está esperando ser procesada por M2 o M3C. La orden es completadaD. La máquina M1 está desocupadaE. La máquina M2 está desocupadaF. La máquina M3 está desocupadaG. El operador O1 está sin trabajoH. El operador O2 está sin trabajoI. El operador O1 está ocupando la máquina M1J. El operador O2 está ocupando la máquina M1K. El operador O1 está ocupando la máquina M2L. El operador O2 está ocupando la máquina M3
Condiciones

Eventos
●Llega una orden●El operador O1 empieza la orden en M1●El operador O1 termina la orden en M1●El operador O2 empieza la orden en M1●El operador O2 termina la orden en M1●El operador O1 empieza la orden en M2●El operador O1 termina la orden en M2●El operador O2 empieza la orden en M3●El operador O2 termina la orden en M3●La orden es terminada y liberada

Precondiciones y postcondiciones de cada evento
Condiciones iniciales: d, e, f,g,h
Eventos Precondiciones Postcondiciones
1 Ninguna A
2 A, G, D I
3 I G, D, B
4 A, H, D J
5 J B, H, D
6 B, G, E K
7 K C, G, E
8 B, F, H I
9 L C, F, H
10 C Ninguna

Acciones transiciones
p1 Trabajo en el buffer de entrada t1 Llegada de trabajo
p2 Maquinado M1-O1 t2 M1 comienza maquinado - O1
p3 Maquinado M1-O2 t3 Mi comienza maquinado - O2
p4 Máquina 1 desocupada t4 M1 finaliza maquinado - O1
p5 Operario 1 disponible t5 M1 finaliza maquinado - O2
p6 Operario 2 disponible t6 M2 comienza maquinado - O1
p7 Trabajo en el buffer intermedio t7 M3 comienza maquinado - O2
p8 Maquinado M2-O1 t8 M2 finaliza maquinado - O1
p9 Máquina 2 desocupada t9 M3 finaliza maquinado O2
p10 Máquina 3 desocupada t10 Salida de trabajo
p11 Maquinado M3-O2
p12 Trabajo en el buffer de salida
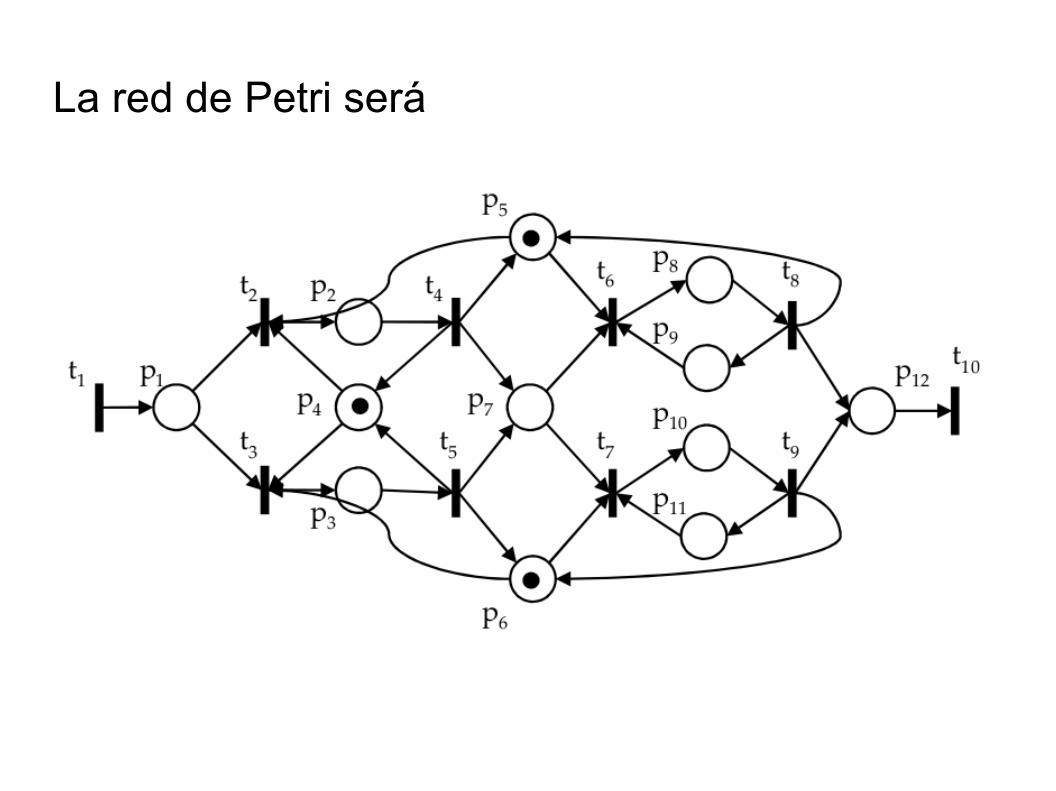
La red de Petri será

Propiedades y su significadoPropiedades de la PN Significado en el modelo del sistema de
manufactura
Alcanzabilidad Un cierto estado a ser alcanzado desde lascondiciones iniciales
Limitaciones Sin capacidad (de, por ejemplo,almacenamiento, área de guardado y estación detrabajo) de saturación
Seguridad Disponibilidad de un recurso simple; o sinpetición para empezar un proceso en marcha
Conservación Conservación de un recurso no consumible(máquinas y VGAs)
Vitalidad Libertad sin punto muerto y garantizar laposibilidad de que un evento, operación, procesoo actividad modelados estén en marcha
Reversibilidad Re-inicialización y comportamiento cíclico
Repetibilidad Existencia de operaciones/actividades/eventosrepetidos para algún marcado
Consistencia Existencia de un comportamiento cíclico para unmarcado

Ejercicio

Considere el sistema simple de ensamble que consiste de una estación de almacenamiento de pallets, una estación de ensamble, una estación de inspección, un vehículo guíado automáticamente (VGA) y un robot.
Dos piezas de trabajo son ensambladas por el robot en la estación de ensamble. Después de que el ensamble se ha completado, el robot descarga un producto terminado en la mesa de trabajo.
El VGA transporta los pallets vacios desde la estación de almacenamiento de pallets a la estación de ensamble.


El robot también es usado para descargar el producto terminado de la mesa de trabajo y posicionarlo sobre el pallet que está sobre el VGA.
Finalmente, el VGA transporta el producto terminado cargado en el pallet a la estación de inspección. La disponibilidad de las piezas de trabajo 1 y 2 son detectadas por dos sensores A y B.
Los interruptores límite S, E y F detectan la presencia del VGA en la estación del almacenamiento, de ensamble e inspección. El sensor C reconoce el producto terminado sobre la mesa.

Básicamente hay tres operaciones a ejecutarse en este sistema:
1. El ensamble y transferencia por el robot de un producto terminado sobre la mesa de trabajo.
2. El viaje del VGA desde la estación de almacenamiento de pallets a la estación de ensamble.
3. Transferencia del producto terminado por el robot sobre el VGA y el viahe del VGA desde la estación de ensamble a la estación de inspección.

Identificando los sensores
Tomando cada sensor como una plaza, tenemos 6 estados. Las condiciones de los sensores nos generan tres transiciones correspondientes a las operaciones que estamos intentando modelar.
Atributos adicionales en el modelo se pueden agregar, como retardos e identificadores de
dispositivos como sensores, relevadores, etc.
SL/sensor A B C D E F
Xi 0 1 2 3 4 5


Ejercicio - Tarea

Considere in centro de maquinado Fanuc que se localiza en una fábrica. La celda se muestra en la siguiente figura y consiste de dos estaciones de trabajo (WS), una máquina de fresado WS1 y un taladro WS2, y un robot R. considere un tipo de producto que necesita solo de fresado.


Las especificaciones de operación de la celda son:
1. Para empezar el ciclo, una parte bruta y el robot deben de estar disponibles.
2. El robot mueve la parte bruta de la banda de entrada y la carga a WS1.
3. La operación de fresado se realiza en WS1 mientras el robot regresa.
4. El robot descarga la parte de WS1 y la deposita sobre la banda de salida y regresa.
Tareas
1. Obtenga la red de Petri del modelo simple de solo el fresado.
2. Considere que ahora el producto realizará tanto fresar y taladrar.
3. Considere que son dos tipos de parte A y B (bloques de diferentes dimensiones) Integrelos a su red.
4. Realice las simulaciones computacionales.

Próxima Sesión
Introducción al Mantenimiento