sensores potenciometricos 37
DESCRIPTION
SENSORES POTENCIOMETRICOS LINELAES CON DOS ANILLOSTRANSCRIPT

Sensores potenciométricos

Potenciómetros
La resistencia varía de acuerdo a la posición del cursor.
Los potenciómetros son dispositivos de orden cero, es decir no siguen un comportamiento de acuerdo a ninguna ecuación diferencial.

Sensores potenciométricos
(3)
(1)
(2)
cursorR = R1+R2
R1
R2
3) Cursor o elemento deslizante

TiposExisten 2 tipos básicos de potenciómetros atendiendo al tipo de desplazamiento:
- Rotacionales
- Traslacionales.
Los rotacionales pueden ser de espira simple o múltiples espiras o multivuelta.
Los traslacionales el desplazamiento es lineal.

Potenciómetros lineales y rotacionalesElementoresistivo Carcasa
Eje
Cursor
Elementoresistivo
Eje de giro
Cursor
Zonamuerta
Carcasa
Junta estanca ycojinete
Junta estancay cojinete
Estructura en sus dos configuraciones mas típicas a) Movimiento lineal, pista recta (resistencia) b) Movimiento angular, pista circular El curso es una pieza móvil que se desliza por medio de un eje sobre la pista resistiva, describiendo movimientos lineales o angulares

Esquemas de potenciómetros lineales y rotacionales

Potenciómetro de precisión
hilo bobinado
Potenciómetro de hilo Bobinado

En el campo de la sensorica industrial (instrumentación industrial), suele utilizarse el potenciómetro de precisión de hilo bobinado, el costo es elevado.
Sus ventajas son:
Capacidad de reducir la histéresis.
Capacidad para reducir el par resistente que ofrece al avance.
Soporta esfuerzos en mas de una dirección.

Potenciómetros multivuelta y de cuerda Tornillo sin-fin
C
A
CCW CW
B
Muelle
Cableflexible
Bobina
POTENCIÓMETRO
Potenciómetro multivuelta: El desplazamiento angular se convierte mediante un tornillo sin fin en un desplazamiento lineal, sus denominaciones estandarizadas para sus terminales son: C: Cursor CW: Terminal al que se aproxima al cursor cuando gira en el sentido horario CCW: Terminal del que se aleja el cursor cuando gira en el sentido horario De cuerda (yo yo o de cable): Permiten medir la posición y la velocidad usando un cable flexible arrollado en una bobina que esta sometida a la tracción de un muelle. Este tipo llega a superar decenas de metros midiendo la longitud de la cuerda extendida

Aplicación
Como sensor de desplazamiento lineal o angular de tipo resistivo.
Pueden usarse para medir diversas magnitudes físicas siempre que sea posible convertirlas en un desplazamiento.

Para la obtención de un voltaje a la salida del sensor (divisor de voltaje), se alimenta con tensión continua.
A veces esta es la única, clase de acondicionamiento que se requiere.
Salida
Vcc
Cursor

Pros y contras de los sensores potenciómetricos
Pros: Requieren una señal análoga para control Requieren información de posición absoluta Bajo costo
Contras: Sensibles a la temperatura (variación) No sirven para ambientes húmedos o con mucho
polvo
Ejemplo de aplicación
Sensor de presión basado en un potenciómetroUna fuerza aplicada sobre una superficie, presión, desplaza un muelle.El desplazamiento del muelle es proporcional a la fuerza ejercida y se lleva al cursor del potenciómetro mediante una varilla.La señal de tensión se obtiene del cursor del potenciómetro que esta configurado como divisor de tensión.

MUELLE
POTENCIÓMETRO
Magnitud física(FUERZA)
VARILLA
V
+
-
VoSEÑAL ELÉCTRICA
DE SALIDA

Comparativa de potenciómetros mas utilizados en instrumentacion
Plástico conductivo
Hilo bobinado Híbridos
Resolución Infinita Limitada Infinita
Potencia Baja Alta Baja
Estabilidad térmica
Pobre Excelente Muy buena
Ruido Muy bajo Bajo Bajo
Vida media 106-108 ciclos 105-106 ciclos 106-107 ciclos
Comportamiento en alta
frecuencia
Buena Pobre Buena
Resumen de las caracteristicas de losprincipales tipos de potenciometros

Tabla resumen de los valores tipicos de dos potenciometros de precision
Parámetro Potenciómetro de precision (plástico conductivo)
Potenciómetro de precisión (hilo bobinado)
Pista Plástico conductivo Hilo bobinado
Tolerancia de la resistencia ±10% ±5%
Linealidad ± 1% (independiente) ± 1% (independiente)
Potencia nominal 1 W (de 0ºC a 70ºC) 2W a 40ºC
Rigidez dieléctrica 750V rms 1000Vrms
Resistencia de aislamiento 1.000MΩ 1.000MΩ a 500 vdc
Rotación eléctrica 340º ±4º 320º ±5º
Rotación mecánica 340º ±5º 330º ±5º
Par de funcionamiento 1,8g-cm 14,4g/cm
Temperatura de funcionamiento
de -65ºC a +125ºC de -55ºC a +125ºC
Resolución infinita limitada
Coeficiente de temperatura ±600ppm/ºC (max) 20ppm/ºC
Vida útil rotacional 5.000.000 ciclos 500.000

Acondicionamiento de señal en potenciómetros lineales
La configuración como un divisor de voltaje, proporciona una forma de acondicionamiento para medir desplazamientos lineales o angulares.
Si se supone que la resistencia del potenciómetro es lineal (resistencia es Cte. por unidad de longitud), la tensión de salida es proporcional al desplazamiento realizado.
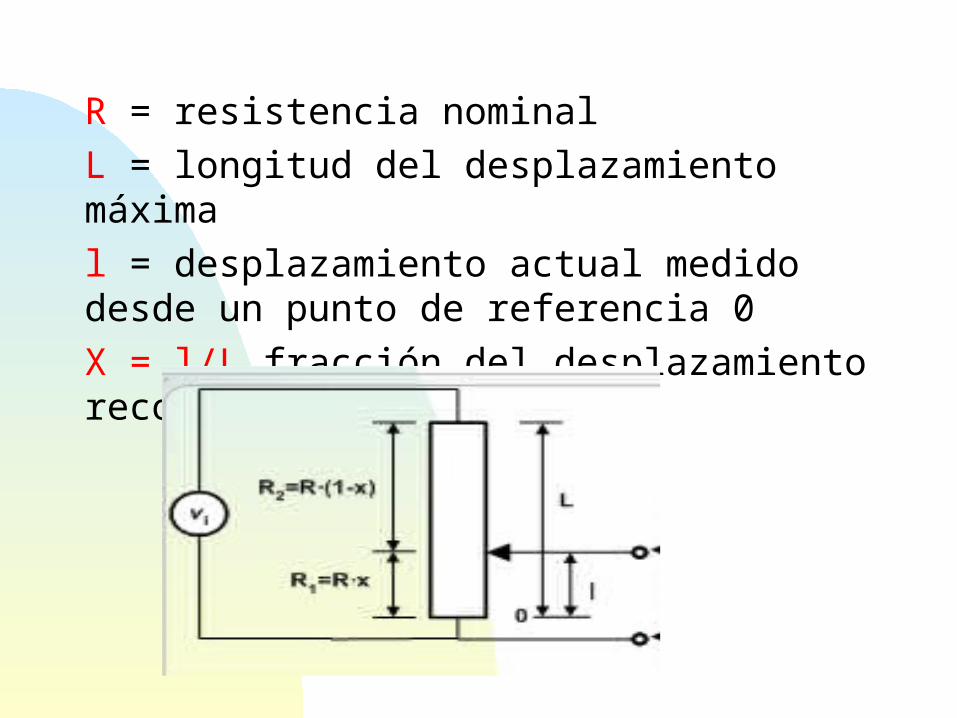
R = resistencia nominal
L = longitud del desplazamiento máxima
l = desplazamiento actual medido desde un punto de referencia 0
X = l/L fracción del desplazamiento recorrido
Como el potenciómetro es lineal, a una fracción de recorrido x, le corresponde una fracción equivalente de la resistencia nominal R.
R1 = R x
R2 = R (1-x)
El comportamiento del potenciómetro como elemento de un circuito depende de su impedancia de entrada Ri y de su impedancia de salida R0.
Sin carga:
Ri = R
R0 = R1//R2 = R x (1-x)

Circuito equivalente en vacio sin carga R0 = R1//R2 = R x (1-x)
R2 = R(1-x)
V0 V0 = Vi x
R1 = Rx
R0 = R1//R2 = R x (1-x)
La impedancia de entrada Ri = R no cambia.
La impedancia de salida R0, cambia en función de la fracción de desplazamiento x.
R0/R = x (1-x).100 %
En circuito abierto no circula corriente por Ro.

Acondicionamiento de potenciómetros (sin carga)
En el grafico, la impedancia de salida se expresa como porcentaje respecto a la resistencia nominal del potenciómetroPara x = 0 y x = 1 la relación Ro/R = 0Para x = 0.5 corresponde al 25% de Ro/R.
0
0,5 1
10
20
30
[%]
R
(x)oR
x

Por lo tanto:
En circuito abierto, los cambios en la impedancia de salida no afectan a la respuesta del potenciómetro ya que no circula corriente por R0.
La tensión de salida V0 coincide con la tensión de Thevenin
0 ≥ x ≤ 1
La tensión de salida varia de forma lineal con el desplazamiento l
L
lvxv
RR
Rvv ii
21
1io

Acondicionamiento de potenciómetros (con carga)
Para que el circuito del potenciómetro realice una función útil, es necesario conectar su salida a la etapa de entrada de otro dispositivo, en cuyo caso, la impedancia de entrada de este dispositivo se comportara como una carga para el potenciómetro.

Acondicionamiento de potenciómetros (con carga)
R2=R·(1-x)L
R1=R·x
vi
RL
Carga
0voL
vth
R o = R·x·(1-x)
Vi·x RL
Carga
voL
l
1k
)x1(x1
xvv iLo
con k = RL / R y x [0,1]
L
LiLo R)x1(Rx
Rxvv

La tensión de salida VoL se deriva de un divisor de tensión entre R0 y RL tal como se muestra en el circuito equivalente.
El valor de R0 es importante ya que va a afectar a la tensión de salida y por lo tanto a la medida

Si se pretende que toda la tensión de Thevenin se acople en la carga, la impedancia de salida debe anularse, pero esto solo ocurre en los extremos del desplazamiento del cursor.
Ro no es Cte.
Y llega a ser hasta un 25 % del valor nominal del potenciómetro justo en la mitad del recorrido.
En el resto de las posiciones, excepto en los extremos, el efecto de la impedancia de salida va a influir sobre la tensión leída, es decir, va introducir un error respecto a la respuesta ideal.
0
0,5 1
10
20
30
[%]
R
(x)oR
x

Una opción para reducir el problema del error es hacer que la carga sea grande comparada con la impedancia de salida del potenciómetro.
La impedancia de entrada, también se modifica con el potenciómetro cargado, siguiendo una variación comprendida entre la resistencia nominal del potenciómetro ( cursor en x = 0) y su paralelo con carga (cursor en x = L).

Analizando el circuito del potenciómetro con carga se obtiene:
con k = RL / R y x [0,1]
La relación entre la tensión de salida y el desplazamiento será:
L
LiLo R)x1(Rx
Rxvv
1k
)x1(x1
xvv iLo
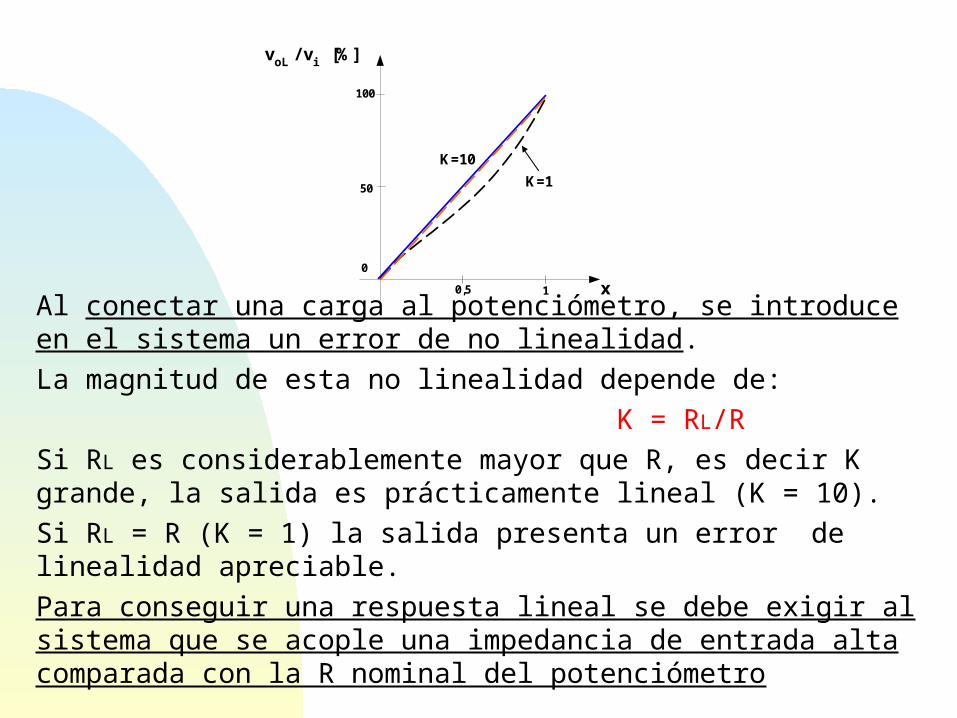
Al conectar una carga al potenciómetro, se introduce en el sistema un error de no linealidad.
La magnitud de esta no linealidad depende de:
K = RL/R
Si RL es considerablemente mayor que R, es decir K grande, la salida es prácticamente lineal (K = 10).
Si RL = R (K = 1) la salida presenta un error de linealidad apreciable.
Para conseguir una respuesta lineal se debe exigir al sistema que se acople una impedancia de entrada alta comparada con la R nominal del potenciómetro
x0
100
0,5 1
50
voL / vi [%]
K=1
K=10
Errores debido al cableadoOtra fuente de error en los sistemas de medida basados en potenciómetros es el cableado.
El sensor se encuentra alejado del sistema que procesa la medida.
Despreciando el error por carga (considerando que la impedancia de entrada del medidor es muy elevada comparada con la impedancia de salida del conjunto sensor potenciométrico – cables), se puede despreciar la corriente que circula a la entrada del medidor, resultando.

Errores debidos al cableado (3 hilos)
R2=R·(1-x)
R1=R·x
SENSOR
POTENCIOMÉTRICO
REMOTO
resistencia de los cables deconexión
Rcable
Rcable
Rcable
Vi
Vo L
Alimentación
MEDIDOR
Sistema de medida a tres hilos

Error de cero o de offsetDel análisis de la ecuación anterior y de su comparación con el caso ideal, se desprenden dos tipos de errores:
Error de offset.
Error de sensibilidad.
Caso ideal:
V0 = Vi . x
Caso real:
Para x = 0
Error de cero o de offset
h21
hxv
R2R
RRxvv i
cable
cableioL
h21
hv)0(v ioL

Error de sensibilidadLa sensibilidad se obtiene:
VoL = Vi (x +h)/(1+2h)
Derivando con respecto a x.
S = Vi (1/1+2h).
Para h = 1 se tiene el grafico:
h21
1vS i

Error de offset y error de sensibilidad en una medida a tres hilos.
En línea de trazos la respuesta ideal
En línea solida la respuesta real con h = 1
La pendiente distinta indica la sensibilidad
respuesta real
voL / vi [%]
x0
100
0.5 1
50
respuesta ideal
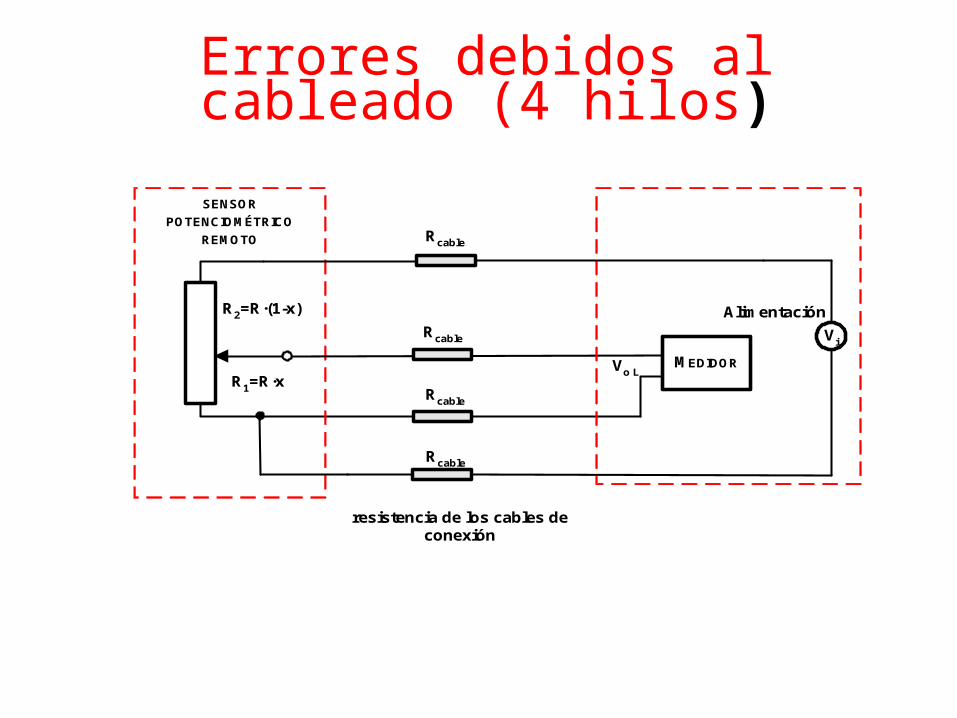
Errores debidos al cableado (4 hilos)
R2=R·(1-x)
R1=R·x
Rcable
Rcable
Rcable
Vi
Vo L
Alimentación
MEDIDOR
Rcable
SENSOR
POTENCIOMÉTRICO
REMOTO
resistencia de los cables deconexión

Para eliminar el error de offset, puede utilizarse un circuito de medida a cuatro hilos.
Despreciando el error por carga se tiene:
Siendo: h = Rcable/R.
Para x = 0
V0L(0) = 0 El Offset es cero
La sensibilidad no cambia y por lo tanto no se corrige el error por la sensibilidad.
h21
xv
R2R
Rxvv i
cableioL