seminario de titulaciÓn “procesamiento digital ......control de motores mediante procesamiento...
TRANSCRIPT
SEMINARIO DE TITULACIÓN “PROCESAMIENTO DIGITAL DE SEÑALES”
CONTRL DE MOTORES MEDIANTE PROCESAMIENTO DIGITAL DE SEÑALES
T E S I N A
Que para obtener el grado de:
INGENIERO EN
COMUNICACIONES Y ELECTRÓNICA.
Presentan:
SALAZAR SÁNCHEZ RUBEN
TIERRA BLANCA MIGUEL ARMANDO
ASESORES:
M. en C. ORLANDO BELTRÁN NAVARRO.
M. en C. BRAULIO SANCHEZ ZAMORA
México, D. F. Junio de 2009.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD CULHUACAN
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÌA MECÀNICA Y ELÈCTRICA
UNIDAD CULHUACAN
QUE PARA OBTENER EL TITULO DE: ING. EN COMUNICACIONES Y ELECTRÓNICA
PARA LA OPCIÓN DE: SEMINARIO DE TITULACIÓ DES/ESIME-CUL/19493/16/09
PRESENTAN: RUBEN SALAZAR SÁNCHEZ
TIERRABLANCA MIGUEL ARMANDO
TESINA
CONTROL DE MOTORES MEDIANTE PROCESAMIENTO DIGITAL DE SEÑALES
En los recientes años se ha visto la evolución de nuevas estrategias de control para motores de CA, llamadas
“control vectorial” y "el control directo del par", que han hecho un cambio fundamental en el cuadro de
motores de alterna con respecto a la actuación dinámica y aunado a esto el uso de los DSP's (Procesador
Digital de Señales) . Por esta razón, se presenta esta literatura para aportar al desarrollo e investigación de
modernos sistemas de accionamientos.
CAPITULADO:
CAPITULO 1. MOTORES DE INDUCCIÓN
CAPITULO 2. TÉCNICAS DE CONTROL DE LOS MOTORES DE INDUCCIÓN
CAPITULO 3. CONTROL DE MOTORES MEDIANTE DSP
M. en C. Orlando Beltrán Navarro M. en C. Braulio Sánchez Zamora
Coordinador del seminario de titulación
Ing. Ignacio Monrroy Ostria
Jefe de la carrera de ICE
México, D. F. Junio de 2009.
3
AGRADECIMINETOS
A DIOS por darme la vida y por ayudarme a crecer en todos los aspectos a través de buenas y
malas experiencias.
A mi padre por brindarme un hogar cálido y enseñarme con el ejemplo que la perseverancia y el
esfuerzo son el camino para lograr objetivos. Como mi padre siempre has sido un hombre con
corazón, que sabe señalar el horizonte con optimismo y confianza. Tu nombre implica la
capacidad de enfrentar los más grandes retos y riegos por el bienestar de tu familia y seres
queridos. Quien tiene la dicha de contar con el cuidado y cariño de un padre, sabe que cuenta con
un tesoro invaluable.
A mi madre por estar en mi vida. Por que se que puedo contar contigo, sé que contigo puedo
compartir mis alegrías, y sé que nuestra amistad se sustenta en mutuo amor. Que seas mi mamá y
mi amiga es el más preciado tesoro, que agradeceré a DIOS eternamente. Gracias por llenar mi
vida con mucha felicidad.
A mi hermana por su apoyo incondicional y por haberme dado el ejemplo de terminar una
carrera.
A mi hermano por ser de mis mejores amigos y por que siempre me ha deseado lo mejor en la
vida.
RUBEN SALAZAR SÁNCHEZ
CONTENIDO
INTRODUCCIÓN i
Justificación iii
Antecedentes iii
Descripción del trabajo vi
OBJETIVO vi
CAPITULO 1. MOTORES DE INDUCCIÓN
1.1 Motores de corriente alterna 1
1.2 Motores asíncronos o de inducción 2
1.2.1 Motores de jaula de ardilla 2
1.2.2 Motor de rotor bobinado 5
1.3 Motores síncronos 5
1.4 Principios de operación del motor de inducción 7
1.4.1 Producción del campo magnético rotatorio 7
1.4.2 Desarrollo del par inducido 8
1.4.3 Deslizamiento de la máquina de inducción 8
1.4.4 Circuito equivalente de la máquina de inducción 8
1.4.5 El modelo transformador de un motor de inducción 8
1.4.6 Circuito modelo del rotor 9
1.4.7 Circuito equivalente final 10
1.4.8 Característica par-velocidad del motor de inducción 11
1.4.9 Clases de diseño de motores de inducción 13
1.4.10 Tendencias en el diseño de motores de inducción 14
CAPITULO 2. TÉCNICAS DE CONTROL DE LOS MOTORES DE INDUCCIÓN
2.1 Introducción 15
2.1.2 Cambio del número de polos 15
2.1.3 Control de la resistencia del secundario 17
2.1.4 Control del voltaje de línea 18
2.1.5 Control de la frecuencia de línea 18
2.1.6 Control de la velocidad mediante relación voltaje/frecuencia 19
2.1.7 Concatenación 21
2.1.8 El sistema de Leblanc 21
2.1.9 El sistema de control de Kramer 22 2.1.10 Sistema de Scherbius 22
2.1.11 Control de velocidad por procedimientos mecánicos 22
2.1.12 Control de la velocidad de los motores monofásicos de c.a 22
2.1.13 Devanado de tomas y reactancia serie 23
2.1.14 Reactor saturable y amplificador magnético 24
2.2 Control óptimo u/f para motores de inducción 25
2.2.1 Técnica de control voltios / hertz 26
2.2.2 Característica u/f optima 27
2.3 Control vectorial 29
2.3.1Control escalar y control vectorial 31
2.3.2 Transformaciones matriciales. Clarke y Park 34
5
2.4 Principios del control directo del par (DTC) 39
2.4.1 Principio de operación 39
2.4.2 Estimación del flujo y del par 42
2.4.3 Efecto de las fronteras de los controladores histéresis 45
2.4.4 Efecto de la frontera del controlador del flujo 45
2.4.5 Efecto de la frontera del controlador del par 46
2.4.6 Ventajas del DTC 47
2.5 CONTROL DIFUSO 48
2.5.1 Modelo de la Máquina de Inducción 49
2.5.2 Lógica Difusa 50
2.5.3 Esquema de Control Propuesto 50
2.5.4 Estimadores de par y flujo 51
2.5.5 Control difuso 51
2.5.6 Lazo de control de corriente 53
2.5.7 Resultados de las Simulaciones 54
Capitulo 3. CONTROL DE MOTORES MEDIANTE DSP
3.1 INTRODUCCION 58
3.2 Descripción del Algoritmo de Control Vectorial 58
3.3 Procesador digital de señal 59
3.4 Soluciones para la implementación 60
INTRODUCCIÓN
El control del movimiento y la automatización es uno de los sectores del mercado de la
electrónica que está avanzando y progresando a gran velocidad. Gracias a la cantidad y la
diversidad de aplicaciones emergentes, y la tendencia de los diseñadores a demandar niveles más
altos de control y eficacia, se producen numerosas innovaciones y cambios.
Los elementos clave del control del movimiento y la automatización en los que se han producido
desarrollos significativos son los motores. Los avances más destacados son la emergencia de
motores de inducción CA.
En los países desarrollados los motores eléctricos consumen cerca del 70% del total de la energía
eléctrica generada. Sin embargo, las deficiencias (por razones económicas) en el diseño de las
maquinas eléctricas y el funcionamiento generalizado de motores en regímenes inadecuados
hacen que cerca del 40% de la energía consumida por ellos se disipe en forma de pérdidas. Estos
datos revelan la importancia del ahorro de energía en motores eléctricos.
Actualmente existen dos vías principales para resolver este problema:
1) Optimización de la construcción de los propios motores que, como se espera, podrá reducir las
pérdidas hasta aproximadamente un 6%.
2) Optimización de los sistemas de control de motores cuyo alcance será aún mayor.
De todos los motores existentes la inmensa mayoría la forman los motores asíncronos. De hecho,
el 98% de toda la energía consumida por motores eléctricos le corresponde a esta clase de
motores. A su vez, entre los motores asíncronos la gran mayoría la constituyen los motores de
jaula de ardilla. Se da la paradoja de que precisamente estos últimos permanecen hoy en día, en
mucho mayor proporción que otros tipos de motores, no regulados. De ahí la importancia de
dotar los accionamientos eléctricos movidos por motores asíncronos de jaula de ardilla con
sistemas de regulación óptima que permitan reducir las pérdidas y garantizar un considerable
ahorro.
Los motores son responsables de cerca de dos tercios del total del consumo de energía en una
instalación industrial típica. Están en todas partes – calefacciones, bombas, compresores, bandas,
máquinas herramienta, mezcladores, trituradores, y más.
El propósito fundamental de cualquier motor eléctrico es convertir la potencia eléctrica en
energía mecánica. Un motor corriendo a 50 por ciento de eficiencia está convirtiendo la mitad de
la potencia eléctrica en trabajo mecánico útil en el eje del motor, mientras el resto se desperdicia.
Los costos de electricidad toman 96 por ciento del ciclo de vida total de un motor, mientras el
precio original de compra y los costos de mantenimiento combinados contribuyen solo con 4 por
ciento. Cuando motores viejos necesitan servicio, es más factible comprar un nuevo modelo de
alta eficiencia en lugar de restaurar un motor viejo. De acuerdo al Departamento de Energía de
Estados Unidos (DOE), cambiar a un motor con 4 a 6 por ciento de más alta clasificación de
energía se puede pagar por sí solo en solo dos años si el motor está en operación por más de
4,000 horas al año. En los Estados Unidos y Europa, los motores consumen cerca de dos tercios
de energía eléctrica.
La DOE también estima que el 80 por ciento de todos los motores en los Estados Unidos son
demasiado grandes, lo que causa que las empresas paguen un alto precio en energía
i

ii
desaprovechada. La eficiencia cae dramáticamente cuando la carga está por debajo de cerca el 40
por ciento de la carga total. Una buena regla es seleccionar un motor con un pico y torque RMS
que sea cerca del 25 por ciento más alto de lo que la aplicación requiere.
El tipo de motor que se selecciona para la aplicación tiene un gran impacto en la eficiencia de
energía. Se puede mejorar significativamente la eficiencia de energía de un motor. La clave para
beneficiarse de estos ahorros se puede encontrar en los algoritmos de control.
Para motores sin escobillas, un amplio rango de algoritmos de control de sistema – incluyendo
trapezoidal, sinusoidal, y control orientado a campo (FOC) – están disponibles. El método más
simple pero de más bajo rendimiento es control trapezoidal, también conocido como control de
seis pasos. Este método tiene significantes limitaciones de desempeño en la forma de rizo de
torque, lo cual causa vibración, ruido, desgaste mecánico, y gran reducción en el rendimiento del
servo. El control sinusoidal, también conocido como conmutación voltaje sobre frecuencia,
aborda muchos de estos problemas. Un controlador sinusoidal maneja los tres embobinados con
corrientes que son muy suaves. Esto elimina los problemas de rizos de torque y ofrece una
rotación suave.
La debilidad fundamental de la conmutación sinusoidal, no obstante, es que intenta controlar las
corrientes variantes del motor utilizando un algoritmo de control proporcional-integral (PI) y no
toma en cuenta las interacciones entre las fases. Como resultado, el rendimiento sufre a altas
velocidades. FOC, también conocido como control vectorial, mejora sobre el control sinusoidal
al proporcionar alta eficiencia a velocidades de motor más rápidas. Proporciona el mayor torque
por watio de potencia de todas las técnicas de control. Los algoritmos FOC pueden transformar
un motor existente en una máquina de alta eficiencia y rendimiento.
Más a detalle, el algoritmo FOC trabaja eliminando las dependencias de tiempo y velocidad y
permitiendo el control directo e independiente del flujo magnético y el torque. La modulación de
ancho de pulso (PWM) es un método eficiente para controlar el inversor de electrónica de
potencia; maximiza el uso de la alimentación de voltaje del motor y minimiza las pérdidas de
armónicos. Lo mejor de todo, se puede utilizar FOC tanto en inducción de AC y máquinas sin
escobilla de DC para mejorar la eficiencia y el rendimiento, y se puede aplicar FOC a motores
existentes actualizando el sistema de control. Cuando se evalúan actualizaciones a sistemas de
control, los costos de energía son típicamente órdenes de magnitud más alta que los costos de
hardware sobre el ciclo de vida del motor. Mejorar la eficiencia en la operación del motor puede
producir significante energía y ahorros de dinero y proporcionar un retorno de la inversión
rápido.
Las técnicas de control vectorial de motores de alterna surgieron como respuesta a un problema
industrial claro: sustituir los motores de CD en aplicaciones a velocidad variable por motores de
alterna y entre éstos, preferentemente, por motores de inducción. La motivación era evidente; el
motor de inducción supera al de CD en robustez, relación peso -potencia y velocidad máximas.
Los accionamientos de motores de inducción de altas prestaciones dinámicas requieren un
control preciso e independiente tanto para el par como para el flujo. La mayoría de los esquemas
modernos están basados en el método del campo orientado o control vectorial.
El control vectorial intenta controlar el motor de inducción como un motor de corriente continua
de excitación separada. La clave del éxito de esta estrategia es el conocimiento correcto de la
posición de flujo del rotor que se estima en el esquema de control vectorial indirecto. Debido a que el flujo del rotor se estima basado en la constante de tiempo del rotor, que varia con la
temperatura y el nivel de la saturación de la máquina, en el caso de que no se disponga los
valores reales de la constante de tiempo del rotor, el comportamiento dinámico y el régimen
permanente se ven afectados de forma considerable con el cambio de los parámetros de la
iii
máquina. Por consiguiente, muchos algoritmos y esquemas se desarrollaron para estimar los
parámetros de la máquina en línea.
Sin embargo, estos esquemas aumentan de forma considerable la complejidad y el coste del
sistema, lo que los convierte en prohibitivos en muchos casos.
De otra parte, con el éxito logrado por el control vectorial en el campo de los accionamientos de
altas prestaciones, aparecieron los estudios novedosos de Takahashi y Noguchi y de Depenbrock
que se desvían y alejan de la idea de la transformación de coordenadas y de la analogía entre el
control vectorial y el control del motor de CC. y proponen la técnica DTC para obtener una
rápida y buena respuesta dinámica del par y del flujo estatórico.
Además, el DTC se considera como una estrategia de control alternativa al control vectorial
por ofrecer algunas ventajas frente el campo orientado que se resumen en los puntos siguientes:
1- La estructura de control es mucho más sencilla, solo requiere dos comparadores de histéresis y
un controlador de velocidad de tipo por ejemplo PI, mientras que el del campo orientado requiere
cuatro PI y un modulador de PWM. Esto hace que el DTC tenga un ancho de banda mucho
mayor y por consiguiente una respuesta dinámica superior.
2- Además, el DTC necesita solo un modelo sencillo del motor de inducción.
3- Su comportamiento es robusto contra la variación de los parámetros. (solo necesita el valor de
la resistencia del estator).
4- No hay que realizar transformación de coordenadas, solo se utilizan las variables reales de las
corrientes y las tensiones en el sistema de referencia estacionario.
5- El DTC ofrece una respuesta dinámica muy alta, regulándose directamente tanto el par como
el flujo de manera separada basándose en una tabla de conmutación óptima, en donde se eligen
los estados de conmutación que cumplen los requisitos de las consignas del par y del flujo sin la
necesidad de la modulación PWM.
6- Su grado de complejidad frente del campo orientado es medio, y por consiguiente se puede
aplicar todos los algoritmos del sistema con tarjetas de adquisición de datos económicas lo que
reduce el coste total del accionamiento.
JUSTIFICACIÓN
1.- Necesidad de disponer de literatura en el tema de control de motores
2.- Necesidad de contribuir en la medida posible al enriquecimiento y complementación
de la literatura existente referente al control de motores.
ANTECEDENTES Los accionamientos de control vectorial establecieron un hito en la regulación de velocidad de
los motores de corriente alterna. Ningún otro desarrollo tecnológico pudo producir en un motor
de CA torque pleno de cero a velocidad nominal para luego conmutar a potencia constante y
alcanzar una velocidad varias veces superior a la nominal, con capacidad de acelerar y
desacelerar en ambas direcciones de rotación y controlar con precisión velocidad, par y posición
en motores compactos o servomotores.
Los accionamientos de velocidad variable de control vectorial han existido desde hace años, sin
embargo sólo en esta última década se han expandido fuertemente en un sinnúmero de aplicaciones. La razón se centra en que se requería de electrónica costosa y de relativa
complejidad para controlar con precisión las corrientes del motor. Esta situación cambió
drásticamente con el desarrollo de los procesadores de señales digitales (DSPs), los
microprocesadores dedicados de alta velocidad y los inversores reguladores de corriente con
modulación de ancho de pulso (Current-Regulated PWM Inverters). Los DSPs y
microprocesadores proporcionan la potencia de cómputo de alta velocidad necesaria para
calcular las corrientes de fase del motor accionado, superando holgadamente los problemas de
derivas y de ajuste de set-point tan frecuentes en las antiguas versiones analógicas de
accionamientos vectoriales.
iv
Complementariamente los inversores PWM con etapas de potencia desarrolladas en torno a
dispositivos semiconductores de alta velocidad de conmutación (Transistores Bipolares de
Compuerta Aislada - IGBT) permiten obtener frecuencias más altas y corrientes de salida
mayores, en volumen reducido y con menor coste.
Los motores trifásicos de inducción se encuentran ampliamente difundidos debido a su
construcción más simple y robusta, su menor tamaño y la menos frecuente necesidad de
mantenimiento, como contrapartida su modelo eléctrico es fuertemente alineal, multivariable y
altamente acoplado, tornando complejo el control de velocidad. A diferencia de ello, el control
de velocidad de los motores de corriente continua de excitación independiente resulta
esencialmente sencillo: la independencia existente entre los bobinados de campo y armadura
permite controlar por separado las corrientes que generan el flujo de magnetización por un lado y
el par por otro. Gobernando estas variables se tiene control completo del motor accionado,
observándose respuestas dinámicas muy veloces con reducidas oscilaciones.
La estrategia de control vectorial se basa en extrapolar la técnica de control de motores de
corriente continua al ámbito de los motores de inducción. Para ello y debido a que una máquina
de corriente alterna carece de dos bobinados desacoplados se recurre al expediente de referenciar
el sistema trifásico alterno de corrientes estatóricas a un sistema de coordenadas no estacionario
que gira sincrónicamente con el campo magnético rotórico. En este nuevo sistema de referencia
las corrientes estatóricas pueden ser tratadas como vectores rotantes, de ahí el nombre de control
vectorial o también control de campo orientado.
El paso siguiente es descomponer este vector en dos componentes: una colineal con el campo
rotórico (normalmente denominada Im) y la restante en cuadratura (normalmente Iw). La
primera resulta ser responsable del flujo magnético de la máquina y se la designa como corriente
de magnetización, la segunda genera el par motriz y se la llama corriente activa. Por la vía de
esta transformación de coordenadas resulta entonces posible desacoplar el modelo matemático de
la máquina de inducción y controlar estas componentes en forma independiente de la misma
manera que en un motor de corriente continua se controlan las corrientes de campo y armadura,
obteniéndose similares respuestas dinámicas. Una vez determinados en este sistema de referencia
no estacionario los valores requeridos de Im e Iw se aplica una transformación de coordenadas
inversa que arroja por resultado las consignas (set-points) de magnitud y fase de las corrientes
alternas estatóricas.
Estas consignas se aplican a la entrada del inversor regulador de corriente quién genera como
respuesta las señales PWM de disparo que atacarán los IGBTs de la etapa de potencia generando
las tensiones que alimentan los bobinados del motor. Cabe aquí mencionar que para poder
ejecutar las rutinas de transformación de coordenadas es necesario contar con el ángulo
desarrollado por el rotor, esta necesidad da origen a dos estrategias diferentes: registrar este
ángulo instante a instante mediante un encoder o tacogenerador (Control vectorial de lazo
cerrado) o estimarlo mediante un observador (Control vectorial sin sensor o de lazo abierto o en su versión en inglés, más difundida, Sensor Less Vector Control).
Mediante la técnica de lazo cerrado resulta posible ejecutar distintas estrategias de control de
acuerdo a la variable que se desea regular, así nos encontramos con control de lazo cerrado de
velocidad o de par.
En muchas aplicaciones se presenta la inquietud sobre si es necesario o no utilizar un sensor de
velocidad, esto es, si realmente es necesaria una estrategia de control vectorial de lazo cerrado.
Se indican a continuación algunos ejemplos a modo de ayuda para definir el uso del mismo:
v
· Requerimiento de elevado nivel de precisión en el ajuste de velocidad, típicamente superior al
0.001% (maquinaria de alta precisión)
· Requerimiento de alta performance dinámica aún a bajas velocidades, del orden de los 20 mseg
(trenes de laminación)
· Requerimiento de elevado par motriz a velocidades inferiores al 10% de la velocidad nominal
del motor, aún a velocidad cero (grúas con funciones de posicionamiento)
· Requerimiento de control de par en un rango mayor a 1:10 (bobinadoras, control de tensión de
lazo cerrado)
SIEMENS ofrece un accionamiento adecuado para cada aplicación con una exacta relación
coste/prestaciones: Master drive Vector Control y Micro master MM440 para motores de baja
tensión y SIMOVERT MV para motores de media tensión permiten implementar estrategias de
control vectorial de lazo abierto o cerrado de velocidad o par y dan respuesta a los más altos
requerimientos de regulación. Por otro lado, Micro master MM410 y MM420 con la técnica de
control desarrollada por SIEMENS Flux Current Control (FCC) que optimiza la corriente de
magnetización para los distintos estados de carga de la máquina accionada, resultan ideales para
aplicaciones de baja y media exigencia dinámica: bombas, ventiladores, posicionamiento
sencillo, cintas de transporte, máquinas de embalaje, elevadores, etc.
Debido a su robustez, las máquinas eléctricas de inducción son en la actualidad uno de los
elementos más importantes en los accionamientos eléctricos modernos presentes en la industria.
Inicialmente se desarrollaron los métodos escalares para controlar estas máquinas. La respuesta
transitoria obtenida con ellos es pobre, o sea insatisfactoria, debido a que este control no regula
separadamente y de forma adecuada tanto el flujo como el par del motor. Por este motivo, no es
aconsejable el empleo de los métodos de control escalar en los accionamientos a los que se les
exige elevadas prestaciones dinámicas. No obstante, la evolución tecnológica a partir de los
ochenta pudo resolver esta dificultad mediante el desarrollo del control vectorial o del campo
orientado, mejorando así el comportamiento transitorio de las máquinas de inducción, lo que
permite aprovechar al máximo la capacidad de las mismas.
El motor de inducción moderno se construyo entre 1888 y 1895, cuando Incola Tesla recibió la
patente de sus ideas sobre los motores de inducción. Poco después se introdujo el rotor de jaula
de ardilla, y hacia 1896 estuvieron disponibles en el mercado motores de inducción trifásicos
plenamente reconocidos y funcionales.
Los esfuerzos de mejoramiento de diseño en aquella época hasta 1970, eran enfocados a
disminuir el costo de construcción: calidad de los aceros, técnicas de fundición, etc. Este enfoque
se debió principalmente a que la electricidad no era tan costosa; por lo tanto, el criterio a seguir
para comprar un motor, era su costo directo.
Desde el ascenso del costo de los combustibles en 1973; el costo de operación de las máquinas
ha sido cada vez más importante, dejando a un lado los costos de instalación. Por lo que el nuevo
énfasis ha sido la eficiencia del motor.
Para aumentar la eficiencia de los motores se utilizan técnicas conducentes a reducir las pérdidas
en el cobre, reducir la densidad de flujo magnético para reducir las pérdidas en el núcleo.
Reducir la temperatura de operación utilizando más acero en el estator, reducir las corrientes
parásitas, etc.

vi
DESCRIPCIÓN DEL TRABAJO
El contenido de este trabajo ofrece una explicación desarrollada sobre generalidades de
motores de CA y su clasificación. Se presenta información al lector sobre el motor de
inducción o jaula de ardilla y sobre los motores síncronos. También se desarrollan las
principales técnicas de control de motores de inducción y finalmente se aborda la forma
de como se implementan los DSP's para el control de un motor de inducción.
OBJETIVO.- Esta tesina tiene por objetivo presentar al lector información actualizada acerca
de los motores asincrónicos o de inducción. Esta información también trata sobre los avances
mas destacados en las técnicas empleadas para su control y la forma en como se implementa un
DSP (Procesador Digital de Señales) en dichos métodos.
1
CAPITULO 1. MOTORES DE INDUCCIÓN
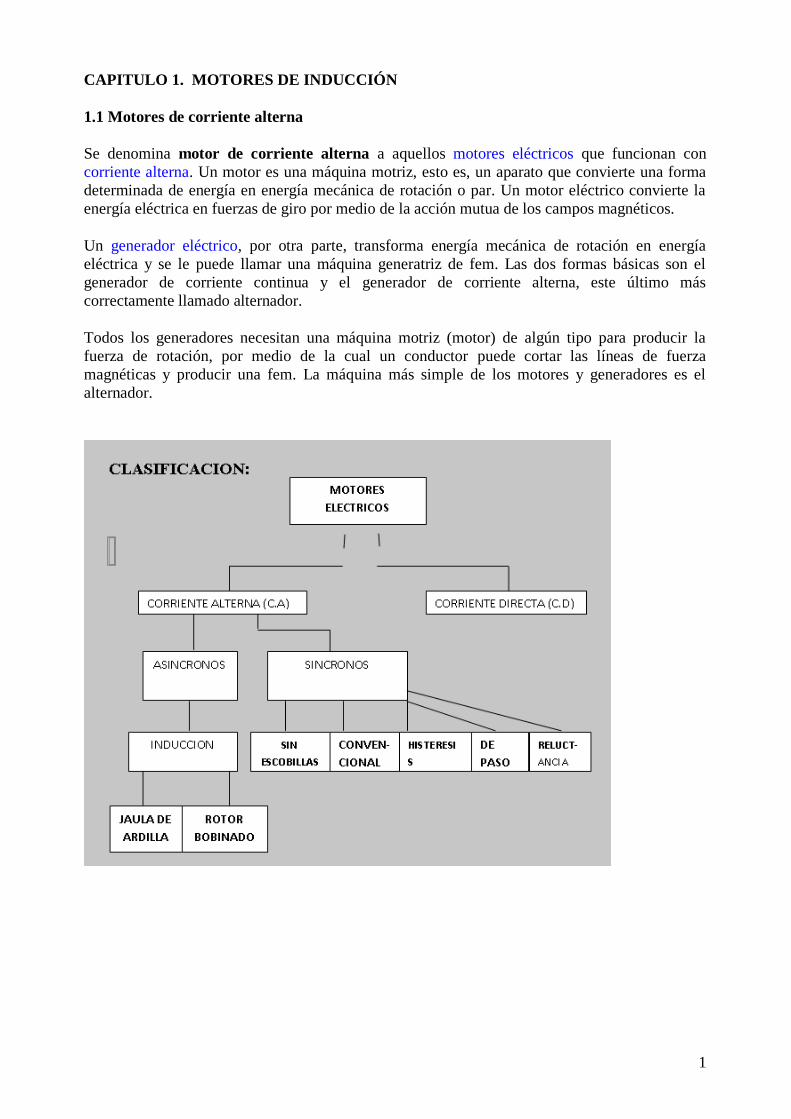
1.1 Motores de corriente alterna
Se denomina motor de corriente alterna a aquellos motores eléctricos que funcionan con
corriente alterna. Un motor es una máquina motriz, esto es, un aparato que convierte una forma
determinada de energía en energía mecánica de rotación o par. Un motor eléctrico convierte la
energía eléctrica en fuerzas de giro por medio de la acción mutua de los campos magnéticos.
Un generador eléctrico, por otra parte, transforma energía mecánica de rotación en energía
eléctrica y se le puede llamar una máquina generatriz de fem. Las dos formas básicas son el
generador de corriente continua y el generador de corriente alterna, este último más
correctamente llamado alternador.
Todos los generadores necesitan una máquina motriz (motor) de algún tipo para producir la
fuerza de rotación, por medio de la cual un conductor puede cortar las líneas de fuerza
magnéticas y producir una fem. La máquina más simple de los motores y generadores es el
alternador.
ººººººººº
2
1.2 MOTORES ASINCRONOS O DE INDUCCIÓN
El motor asíncrono fue creado es su forma más simple por Galileo Ferraris y Nikola Tesla en
1885-86. Dos años más tarde se construyó una máquina con el rotor en forma de jaula de ardilla.
el rotor de bobinado se desarrolló a principio del S.XX.
La diferencia del motor asíncrono con el resto de los motores eléctricos radica en el hecho de que
no existe corriente conducida a uno de sus devanados (normalmente al rotor).
La corriente que circula por el devanado del rotor se debe a la fuerza electromotriz inducida en él
por el campo giratorio; por esta razón, a este tipo de motores se les designa también como
motores de inducción.
La denominación de motores asíncronos obedece a que la velocidad de giro del motor no es la de
sincronismo, impuesta por la frecuencia de la red.
Hoy en día se puede decir que más del 80% de los motores eléctricos utilizados en la industria
son de este tipo, trabajando en general a velocidad prácticamente constante. No obstante, y
gracias al desarrollo de la electrónica de potencia (inversores y ciclo convertidores), en los
últimos años está aumentando considerablemente la utilización de este tipo de motores a
velocidad variable.
La gran utilización de los motores asíncronos se debe a las siguientes causas: construcción
simple, bajo peso, mínimo volumen, bajo coste y mantenimiento inferior al de cualquier otro tipo
de motor eléctrico.
Hay dos tipos básicos de motores asíncronos:
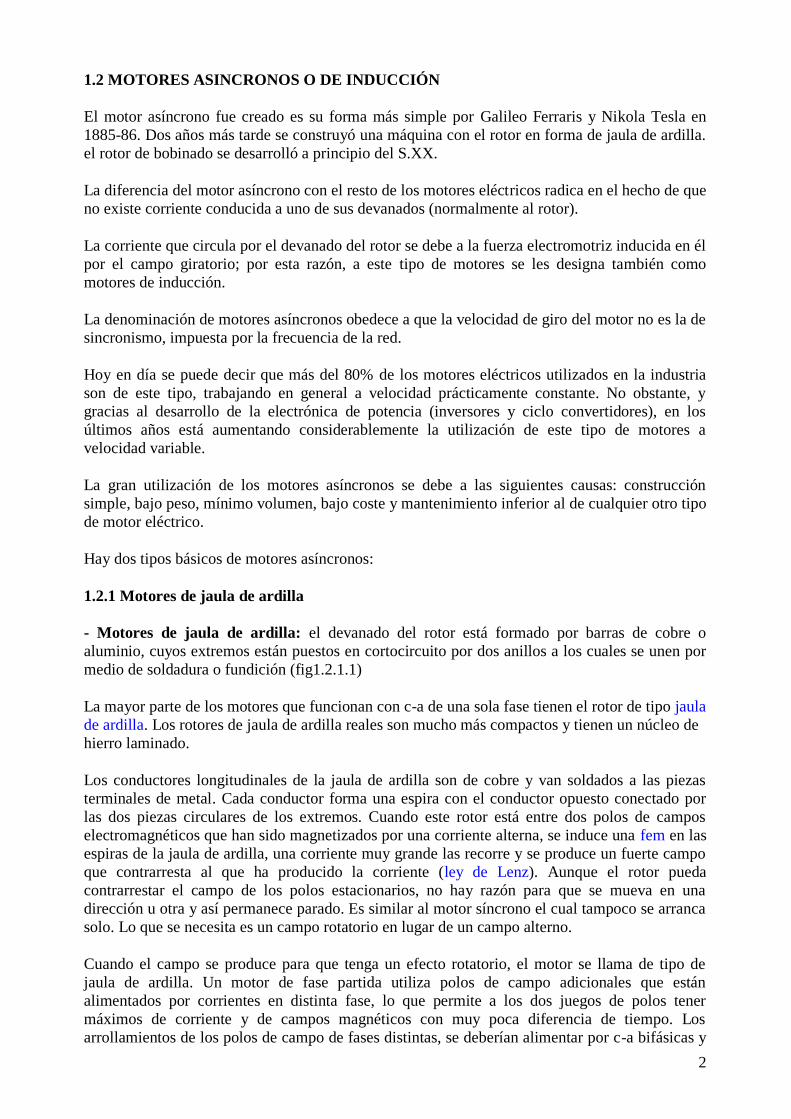
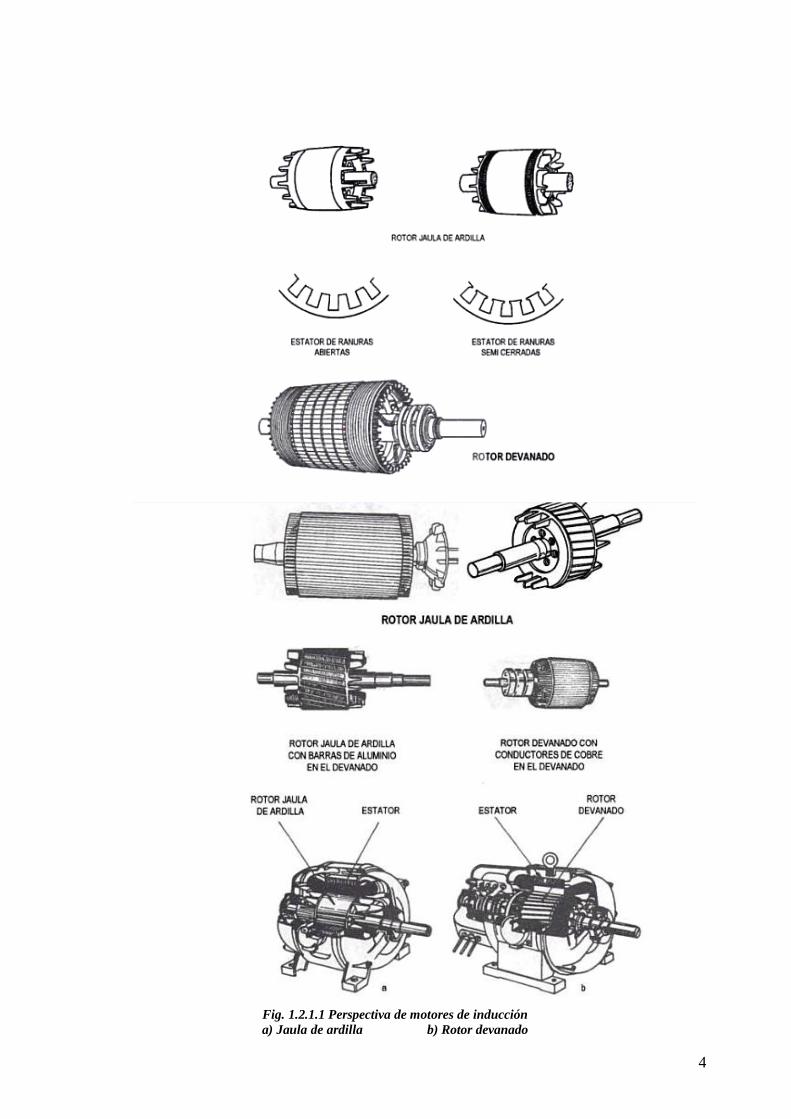
1.2.1 Motores de jaula de ardilla
- Motores de jaula de ardilla: el devanado del rotor está formado por barras de cobre o
aluminio, cuyos extremos están puestos en cortocircuito por dos anillos a los cuales se unen por
medio de soldadura o fundición (fig1.2.1.1)
La mayor parte de los motores que funcionan con c-a de una sola fase tienen el rotor de tipo jaula
de ardilla. Los rotores de jaula de ardilla reales son mucho más compactos y tienen un núcleo de
hierro laminado.
Los conductores longitudinales de la jaula de ardilla son de cobre y van soldados a las piezas
terminales de metal. Cada conductor forma una espira con el conductor opuesto conectado por
las dos piezas circulares de los extremos. Cuando este rotor está entre dos polos de campos
electromagnéticos que han sido magnetizados por una corriente alterna, se induce una fem en las
espiras de la jaula de ardilla, una corriente muy grande las recorre y se produce un fuerte campo
que contrarresta al que ha producido la corriente (ley de Lenz). Aunque el rotor pueda
contrarrestar el campo de los polos estacionarios, no hay razón para que se mueva en una
dirección u otra y así permanece parado. Es similar al motor síncrono el cual tampoco se arranca
solo. Lo que se necesita es un campo rotatorio en lugar de un campo alterno.
Cuando el campo se produce para que tenga un efecto rotatorio, el motor se llama de tipo de
jaula de ardilla. Un motor de fase partida utiliza polos de campo adicionales que están
alimentados por corrientes en distinta fase, lo que permite a los dos juegos de polos tener
máximos de corriente y de campos magnéticos con muy poca diferencia de tiempo. Los
arrollamientos de los polos de campo de fases distintas, se deberían alimentar por c-a bifásicas y
3
producir un campo magnético rotatorio, pero cuando se trabaja con una sola fase, la segunda se
consigue normalmente conectando un condensador (o resistencia) en serie con los arrollamientos
de fases distintas.
Con ello se puede desplazar la fase en más de 20° y producir un campo magnético máximo en el
devanado desfasado que se adelanta sobre el campo magnético del devanado principal.
Desplazamiento real del máximo de intensidad del campo magnético desde un polo al siguiente,
atrae al rotor de jaula de ardilla con sus corrientes y campos inducidos, haciéndole girar. Esto
hace que el motor se arranque por sí mismo.
El devanado de fase partida puede quedar en el circuito o puede ser desconectado por medio de
un conmutador centrífugo que le desconecta cuando el motor alcanza una velocidad
predeterminada. Una vez que el motor arranca, funciona mejor sin el devanado de fase partida.
De hecho, el rotor de un motor de inducción de fase partida siempre se desliza produciendo un
pequeño porcentaje de reducción de la que sería la velocidad de sincronismo.
Si la velocidad de sincronismo fuera 1.800 rpm, el rotor de jaula de ardilla, con una cierta carga,
podría girar a 1.750 rpm. Cuanto más grande sea la carga en el motor, más se desliza el rotor. En
condiciones óptimas de funcionamiento un motor de fase partida con los polos en fase
desconectados, puede funcionar con un rendimiento aproximado del 75%.
Otro modo de producir un campo rotatorio en un motor, consiste en sombrear el campo
magnético de los polos de campo. Esto se consigue haciendo una ranura en los polos de campo y
colocando un anillo de cobre alrededor de una de las partes del polo.
Mientras la corriente en la bobina de campo está en la parte creciente de la alternancia, el campo
magnético aumenta e induce una fem y una corriente en el anillo de cobre. Esto produce un
campo magnético alrededor del anillo que contrarresta el magnetismo en la parte del polo donde
se halla él.
En este momento se tiene un campo magnético máximo en la parte de polo no sombreada y un
mínimo en la parte sombreada. En cuanto la corriente de campo alcanza un máximo, el campo
magnético ya no varía y no se induce corriente en el anillo de cobre. Entonces se desarrolla un
campo magnético máximo en todo el polo. Mientras la corriente está decreciendo en amplitud el
campo disminuye y produce un campo máximo en la parte sombreada del polo.
De esta forma el campo magnético máximo se desplaza de la parte no sombreada a la sombreada
de los polos de campo mientras avanza el ciclo de corriente. Este movimiento del máximo de
campo produce en el motor el campo rotatorio necesario para que el rotor de jaula de ardilla se
arranque solo. El rendimiento de los motores de polos de inducción sombreados no es alto, varía
del 30 al 50 por 100. Una de las principales ventajas de todos los motores de jaula de ardilla,
particularmente en aplicaciones de radio, es la falta de colector o de anillos colectores y
escobillas. Esto asegura el funcionamiento libre de interferencias cuando se utilizan tales
motores. Estos motores también son utilizados en la industria. El mantenimiento que se hace a
estos motores es fácil.
Un motor de inducción esta constituido fundamentalmente por los siguientes elementos (figura
1.2.1.2):
1. Estator
2. Rotor
4
Fig. 1.2.1.1 Perspectiva de motores de inducción
a) Jaula de ardilla b) Rotor devanado

5
Fig. 1.2.1.2 Componentes principales de un motor eléctrico
1.2.2 Motor de rotor bobinado: el devanado del rotor de estos motores está formado por un
bobinado trifásico similar al del estator, con igual número de polos.
Un motor de rotor bobinado a igualdad de potencia y clase de protección, es más costoso, menos
robusto y exige un mantenimiento mayor que uno de jaula de ardilla. No obstante, frente a este
último posee fundamentalmente dos ventajas, que en algunos casos concretos resultan
determinantes: las características del circuito eléctrico del rotor pueden ser modificadas en cada
instante desde el exterior, y la tensión e intensidad del rotor son directamente accesibles a la
medida o al control electrónico.
1.3 MOTORES SINCRONOS
El motor síncrono es en esencia un alternador trifásico que funciona a la inversa. Los imanes
del campo se montan sobre un rotor y se excitan mediante corriente continua, y las bobinas de la
armadura están divididas en tres partes y alimentadas con corriente alterna trifásica. La variación
de las tres ondas de corriente en la armadura provoca una reacción magnética variable con los
polos de los imanes del campo, y hace que el campo gire a una velocidad constante, que se
determina por la frecuencia de la corriente en la línea de potencia de corriente alterna.
La velocidad constante de un motor síncrono es ventajosa en ciertos aparatos. Sin embargo, no
pueden utilizarse este tipo de motores en aplicaciones en las que la carga mecánica sobre el
motor llega a ser muy grande, ya que si el motor reduce su velocidad cuando está bajo carga
puede quedar fuera de fase con la frecuencia de la corriente y llegar a pararse. Los motores
síncronos pueden funcionar con una fuente de potencia monofásica mediante la inclusión de los
elementos de circuito adecuados para conseguir un campo magnético rotatorio.
El más simple de todos los tipos de motores eléctricos es el motor de inducción de caja de
ardilla que se usa con alimentación trifásica. La armadura de este tipo de motor consiste en tres
bobinas fijas y es similar a la del motor síncrono. El elemento rotatorio consiste en un núcleo, en
el que se incluyen una serie de conductores de gran capacidad colocados en círculo alrededor del
árbol y paralelos a él. Cuando no tienen núcleo, los conductores del rotor se parecen en su forma
a las jaulas cilíndricas que se usaban para las ardillas.
Los motores de baterías en serie con conmutadores, que funcionan tanto con corriente continua
como con corriente alterna, se denominan motores universales. Éstos se fabrican en tamaños
pequeños y se utilizan en aparatos domésticos.

6
Implicando, se puede utilizar un alternador como motor en determinadas circunstancias. Si se
excita el campo con c-c y se alimenta por los anillos colectores a la bobina del rotor con c-a, la
máquina no arrancará. El campo alrededor de la bobina del rotor es alterno en polaridad
magnética pero durante un semiperiodo del ciclo completo, intentará moverse en una dirección y
durante el siguiente semiperiodo en la dirección opuesta. El resultado es que la máquina
permanece parada. La máquina solamente se calentará y posiblemente se quemará.
Para generar el campo magnético del rotor, se suministra una CC al devanado del campo; esto se
realiza frecuentemente por medio de una excitatriz, la cual consta de un pequeño generador de
CC impulsado por el motor, conectado mecánicamente a él. Se mencionó anteriormente que para
obtener un par constante en un motor eléctrico, es necesario mantener los campos magnéticos del
rotor y del estator constantes el uno con relación al otro. Esto significa que el campo que rota
electromagnéticamente en el estator y el campo que rota mecánicamente en el rotor se deben
alinear todo el tiempo.
La única condición para que esto ocurra consiste en que ambos campos roten a la velocidad
sincrónica:
(Ec.1.1)
Es decir, son motores de velocidad constante.
Para una máquina sincrónica de polos no salientes (rotor cilíndrico), el par se puede escribir en
términos de la corriente alterna del estator, is(t), y de la corriente continua del rotor, if:
(Ec.1.2 donde γ es el ángulo entre los campos del estator y del rotor)
El rotor de un alternador de dos polos debe hacer una vuelta completa para producir un ciclo de
c-a. Debe girar 60 veces por segundo (si la frecuencia fuera de 60 Hz), o 3.600 revoluciones por
minuto (rpm), para producir una c-a de 60 Hz. Si se puede girar a 3.600 rpm tal alternador por
medio de algún aparato mecánico, como por ejemplo, un motor de c-c, y luego se excita el
inducido con una c-a de 60 Hz, continuará girando como un motor síncrono.
Su velocidad de sincronismo es 3.600 rpm. Si funciona con una c-a de 50 Hz, su velocidad de
sincronismo será de 3.000 rpm. Mientras la carga no sea demasiado pesada, un motor síncrono
gira a su velocidad de sincronismo y solo a esta velocidad. Si la carga llega a ser demasiado
grande, el motor va disminuyendo velocidad, pierde su sincronismo y se para. Los motores
síncronos de este tipo requieren todos una excitación de c-c para el campo (o rotor), así como
una excitación de c-a para el estator.
Se puede fabricar un motor síncrono construyendo el rotor cilíndrico normal de un motor tipo
jaula de ardilla con dos lados planos. Un ejemplo de motor síncrono es el reloj eléctrico, que
debe arrancarse a mano cuando se para. En cuanto se mantiene la c-a en su frecuencia correcta,
el reloj marca el tiempo exacto. No es importante la precisión en la amplitud de la tensión.
7
1.4 Principios de operación del motor de inducción
Los motores asíncronos o de inducción, son prácticamente motores trifásicos. Están basados en
el accionamiento de una masa metálica por la acción de un campo giratorio.
Están formados por dos armaduras con campos giratorios coaxiales: una es fija, y la otra móvil.
También se les llama, respectivamente, estator y rotor.
El devandado del rotor, que conduce la corriente alterna que se produce por inducción desde el
devanado del estator conectado directamente, consiste de conductores de cobre o aluminio
vaciados en un rotor de laminaciones de acero. Se instalan anillos terminales de cortocircuito
en ambos extremos de la “jaula de ardilla” o bien en uno de los extremos en el caso del rotor
devanado.
Los motores de inducción de rotor devanado son menos utilizados, debido a su mayor costo, y a
que requieren de más mantenimiento que los de jaula de ardilla.
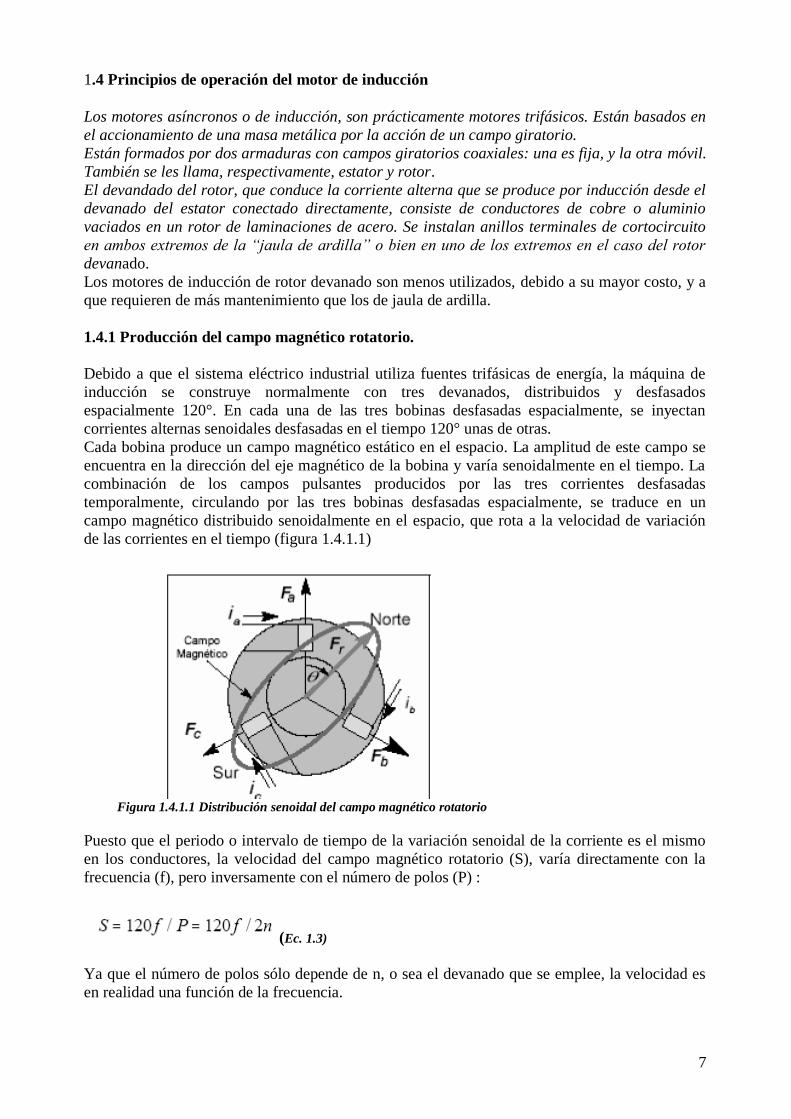
1.4.1 Producción del campo magnético rotatorio.
Debido a que el sistema eléctrico industrial utiliza fuentes trifásicas de energía, la máquina de
inducción se construye normalmente con tres devanados, distribuidos y desfasados
espacialmente 120°. En cada una de las tres bobinas desfasadas espacialmente, se inyectan
corrientes alternas senoidales desfasadas en el tiempo 120° unas de otras.
Cada bobina produce un campo magnético estático en el espacio. La amplitud de este campo se
encuentra en la dirección del eje magnético de la bobina y varía senoidalmente en el tiempo. La
combinación de los campos pulsantes producidos por las tres corrientes desfasadas
temporalmente, circulando por las tres bobinas desfasadas espacialmente, se traduce en un
campo magnético distribuido senoidalmente en el espacio, que rota a la velocidad de variación
de las corrientes en el tiempo (figura 1.4.1.1)
Figura 1.4.1.1 Distribución senoidal del campo magnético rotatorio
Puesto que el periodo o intervalo de tiempo de la variación senoidal de la corriente es el mismo
en los conductores, la velocidad del campo magnético rotatorio (S), varía directamente con la
frecuencia (f), pero inversamente con el número de polos (P) :
(Ec. 1.3)
Ya que el número de polos sólo depende de n, o sea el devanado que se emplee, la velocidad es
en realidad una función de la frecuencia.
8
1.4.2 Desarrollo del par inducido.
Cuando se aplican al estator un conjunto trifásico de voltajes, se generan un conjunto de
corrientes trifásicas que producen un campo magnético BS que rota en dirección contraria a las
manecillas del reloj. Éste induce voltaje en las barras del rotor, y este voltaje está dado por la
ecuación:
(Ec. 1.4)
en donde v es la velocidad de la barra, relativa al campo magnético; B es el vector de densidad
de flujo magnético; y l, la longitud del conductor en el campo magnético.
El movimiento relativo del rotor con respecto al campo magnético del estator (Bs) induce voltaje
en una barra del rotor. El flujo magnético del rotor produce un campo magnético del rotor BR. El
par en la máquina, ind τ , está dado por:
(Ec. 1.5)
y la dirección es en sentido contrario a las manecillas del reloj, por lo tanto el rotor se acelera en
esa dirección. En operación normal, los campos magnéticos del estator y del rotor giran a la
velocidad sincrónica, mientras que el rotor gira a una velocidad menor.
1.4.3 Deslizamiento de la máquina de inducción.
El deslizamiento de una máquina de inducción, se define como la velocidad relativa entre el
campo magnético producido por las corrientes inyectadas en el estator y la velocidad mecánica
del rotor, por unidad de la velocidad del campo:
(Ec. 1.6)
Siendo s el porcentaje de deslizamiento para fines de cálculo. S es la velocidad síncrona
(120f/P) en rpm del campo magnético rotatorio producida por el estator; y Sr es la velocidad del
rotor en rpm.
En general, a la velocidad del campo se le denomina velocidad síncrona de la máquina, y el
deslizamiento indica qué tan cerca se encuentra la máquina de esta velocidad. Si el rotor de la
máquina gira a una velocidad mayor que la síncrona, el deslizamiento se hace negativo. Cuando
se conocen todos los parámetros del modelo de una máquina de inducción y la fuente de
alimentación, el deslizamiento determina el punto de operación. Por esta razón se utiliza esta
variable para definir el estado de la máquina.
1.4.4 Circuito equivalente de la máquina de inducción.
El circuito equivalente de un motor de inducción es muy similar al de un transformador, debido a
la acción de transformación que ocurre al inducirse corrientes en el rotor, desde el estator.
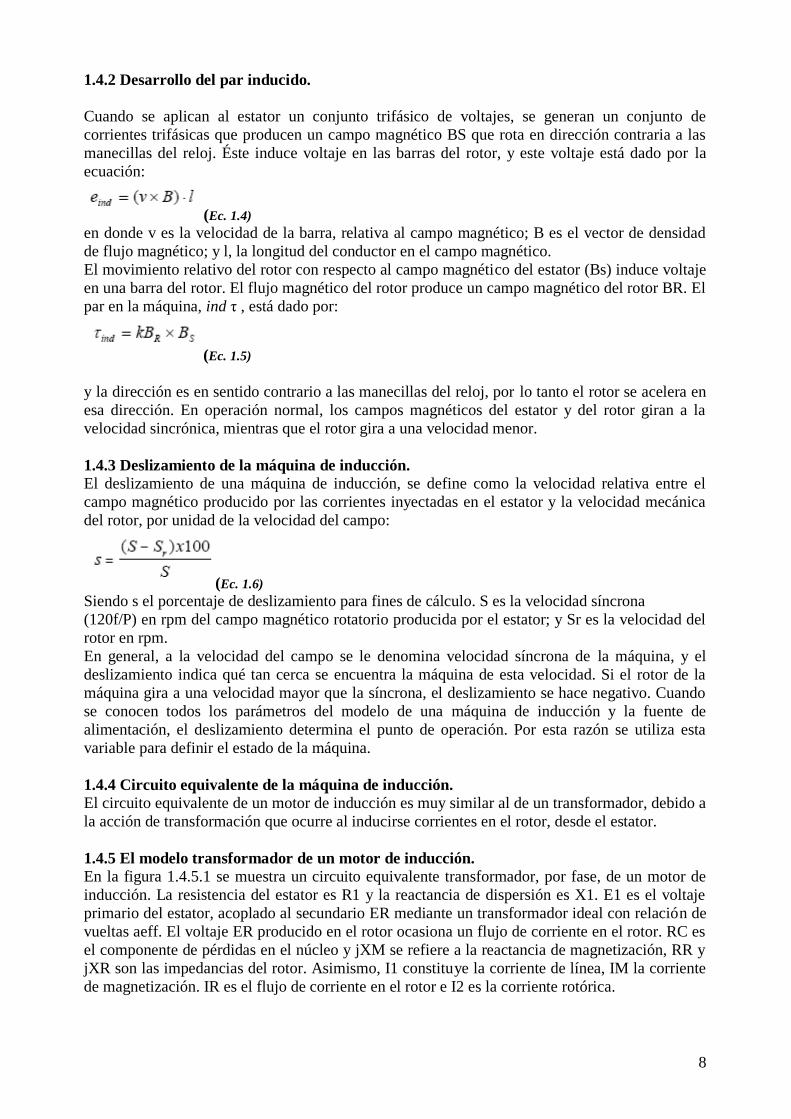
1.4.5 El modelo transformador de un motor de inducción.
En la figura 1.4.5.1 se muestra un circuito equivalente transformador, por fase, de un motor de
inducción. La resistencia del estator es R1 y la reactancia de dispersión es X1. E1 es el voltaje
primario del estator, acoplado al secundario ER mediante un transformador ideal con relación de
vueltas aeff. El voltaje ER producido en el rotor ocasiona un flujo de corriente en el rotor. RC es
el componente de pérdidas en el núcleo y jXM se refiere a la reactancia de magnetización, RR y
jXR son las impedancias del rotor. Asimismo, I1 constituye la corriente de línea, IM la corriente
de magnetización. IR es el flujo de corriente en el rotor e I2 es la corriente rotórica.
9
Fig. 1.4.5.1 Modelo transformador de un motor de inducción con el rotor y el estator conectados por un
transformador ideal de relación de vueltas aeff
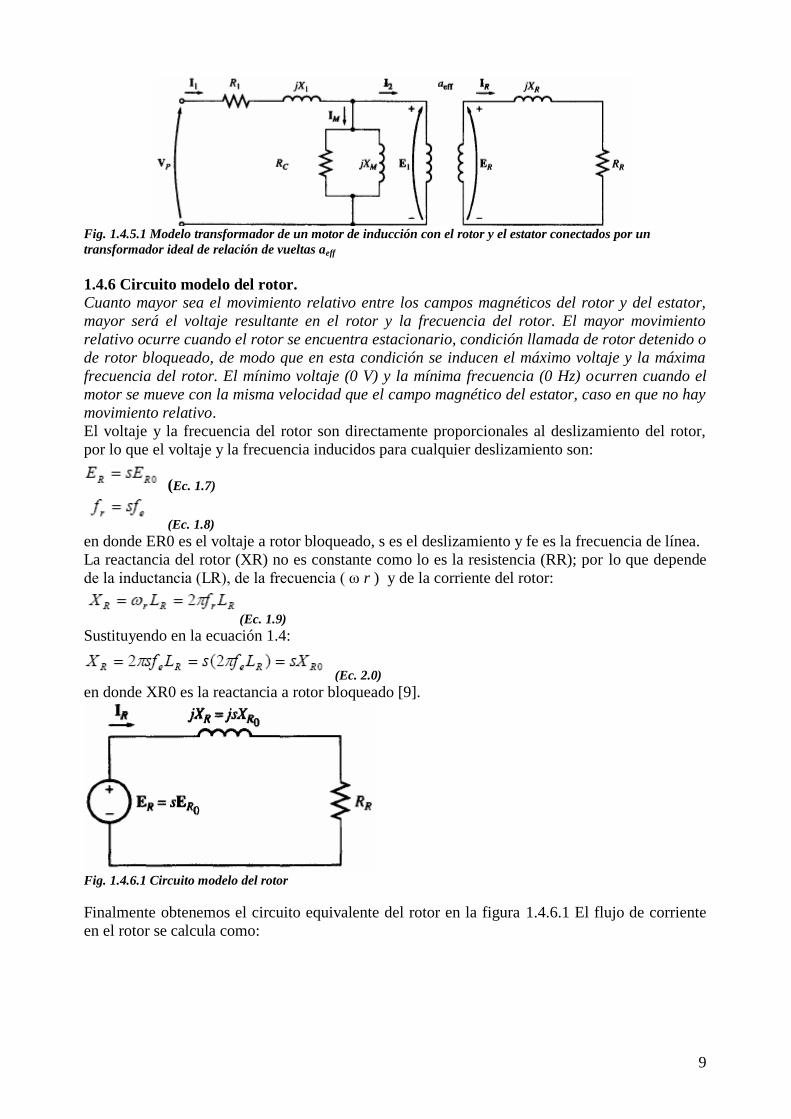
1.4.6 Circuito modelo del rotor.
Cuanto mayor sea el movimiento relativo entre los campos magnéticos del rotor y del estator,
mayor será el voltaje resultante en el rotor y la frecuencia del rotor. El mayor movimiento
relativo ocurre cuando el rotor se encuentra estacionario, condición llamada de rotor detenido o
de rotor bloqueado, de modo que en esta condición se inducen el máximo voltaje y la máxima
frecuencia del rotor. El mínimo voltaje (0 V) y la mínima frecuencia (0 Hz) ocurren cuando el
motor se mueve con la misma velocidad que el campo magnético del estator, caso en que no hay
movimiento relativo.
El voltaje y la frecuencia del rotor son directamente proporcionales al deslizamiento del rotor,
por lo que el voltaje y la frecuencia inducidos para cualquier deslizamiento son:
(Ec. 1.7)
(Ec. 1.8)
en donde ER0 es el voltaje a rotor bloqueado, s es el deslizamiento y fe es la frecuencia de línea.
La reactancia del rotor (XR) no es constante como lo es la resistencia (RR); por lo que depende
de la inductancia (LR), de la frecuencia ( ω r ) y de la corriente del rotor:
(Ec. 1.9) Sustituyendo en la ecuación 1.4:
(Ec. 2.0) en donde XR0 es la reactancia a rotor bloqueado [9].
Fig. 1.4.6.1 Circuito modelo del rotor
Finalmente obtenemos el circuito equivalente del rotor en la figura 1.4.6.1 El flujo de corriente
en el rotor se calcula como:
10
(Ec. 2.1)
(Ec. 2.2)
(Ec. 2.3)
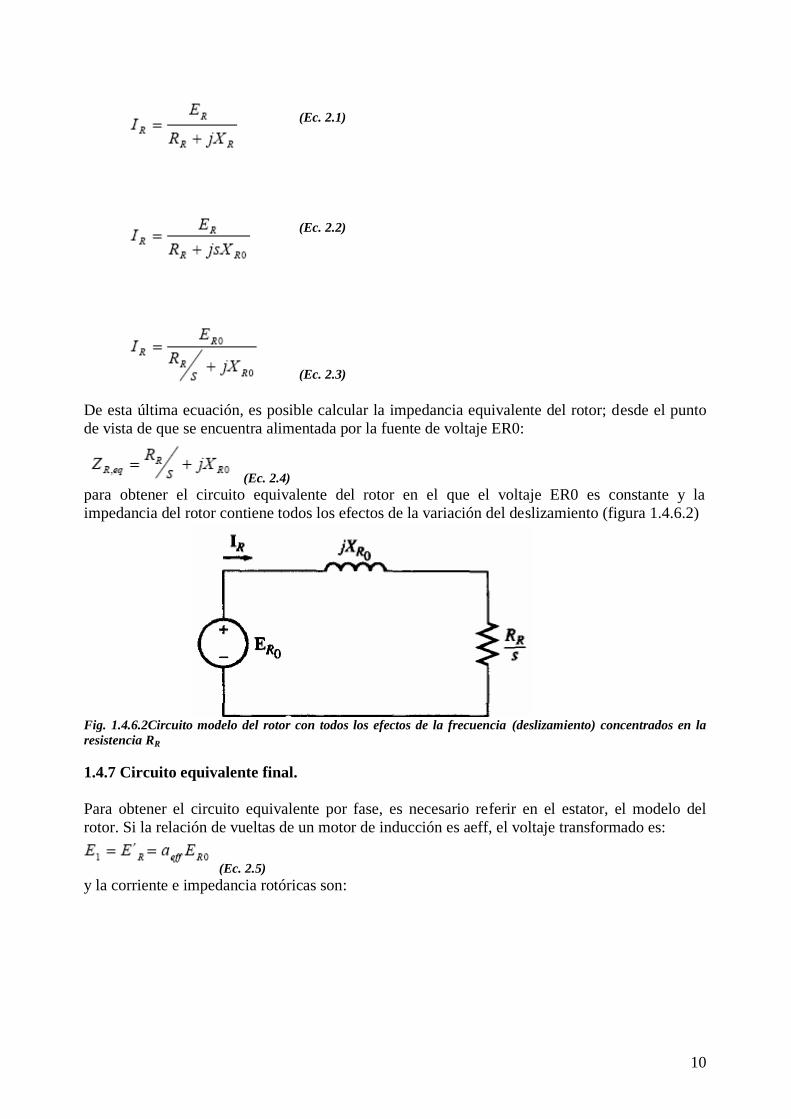
De esta última ecuación, es posible calcular la impedancia equivalente del rotor; desde el punto
de vista de que se encuentra alimentada por la fuente de voltaje ER0:
(Ec. 2.4) para obtener el circuito equivalente del rotor en el que el voltaje ER0 es constante y la
impedancia del rotor contiene todos los efectos de la variación del deslizamiento (figura 1.4.6.2)
Fig. 1.4.6.2Circuito modelo del rotor con todos los efectos de la frecuencia (deslizamiento) concentrados en la
resistencia RR
1.4.7 Circuito equivalente final.
Para obtener el circuito equivalente por fase, es necesario referir en el estator, el modelo del
rotor. Si la relación de vueltas de un motor de inducción es aeff, el voltaje transformado es:
(Ec. 2.5) y la corriente e impedancia rotóricas son:

11
y si se definen:
obtenemos finalmente el circuito equivalente por fase de la figura 1.4.7.1
Fig. 1.4.7.1 Circuito equivalente por fase en un motor de inducción.
1.4.8 Característica par-velocidad del motor de inducción.
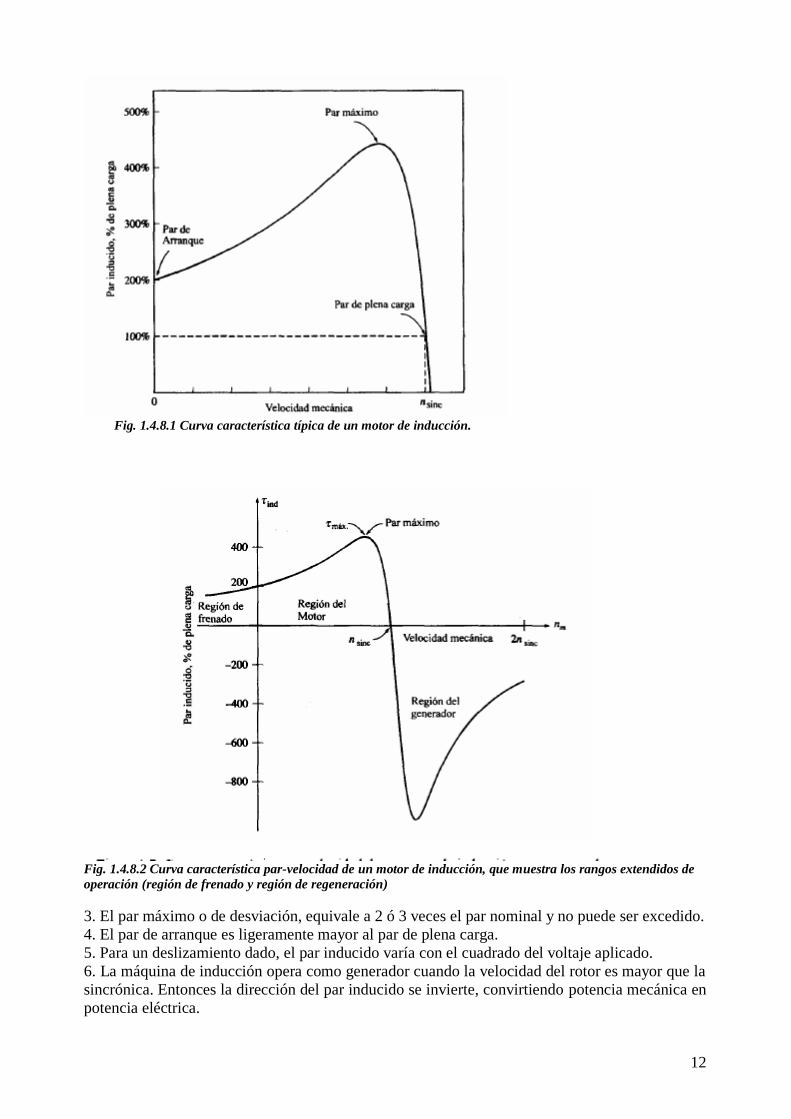
En la figuras 1.4.8.1 y 1.4.8.2 se presentan las curvas características par-velocidad del motor de
inducción. La información que proveen, se resume a continuación:
1. El par inducido del motor es cero a la velocidad sincrónica.
2. La curva par-velocidad es aproximadamente lineal entre vacío y plena carga; ya que cuando
crece el deslizamiento, crecen linealmente: la corriente rotórica, el campo magnético del rotor, y
el par inducido.
(Ec. 2.6)
(Ec. 2.7)
(Ec. 2.8)
(Ec. 2.9)
12
Fig. 1.4.8.1 Curva característica típica de un motor de inducción.
Fig. 1.4.8.2 Curva característica par-velocidad de un motor de inducción, que muestra los rangos extendidos de
operación (región de frenado y región de regeneración)
3. El par máximo o de desviación, equivale a 2 ó 3 veces el par nominal y no puede ser excedido.
4. El par de arranque es ligeramente mayor al par de plena carga.
5. Para un deslizamiento dado, el par inducido varía con el cuadrado del voltaje aplicado.
6. La máquina de inducción opera como generador cuando la velocidad del rotor es mayor que la
sincrónica. Entonces la dirección del par inducido se invierte, convirtiendo potencia mecánica en
potencia eléctrica.

13
7. Para frenar con rapidez el motor, se conmutan dos fases, que significa invertir la dirección de
rotación del campo magnético.
1.4.9 Clases de diseño de motores de inducción.
La National Electric Manufacturers Association (NEMA) y la International
Electrotechnical Comision (IEC), han desarrollado un sistema de identificación mediante letras
para los motores comerciales, según las curvas características par-velocidad para cada diseño:
. Fig. 1.4.9.1 Curvas características típicas para diferentes diseños de motores
DISEÑO CLASE A. Es un motor de jaula de ardilla para usarse a velocidad constante. Sus
principales características son:
- Buena capacidad de disipación de calor.
- Alta resistencia y baja reactancia al arranque.
- El par máximo está entre 200% y 300% del par de plena carga y ocurre a un bajo
deslizamiento.
- Aceleración bastante rápida hacia la velocidad nominal.
- Presenta la mejor regulación de velocidad, entre el 2 y 4%.
- Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la corriente nominal.
- Han sido reemplazados por los motores de diseño clase B en los últimos años.
- Se utilizan en ventiladores, sopladores, bombas, tornos, etc.
DISEÑO CLASE B. Se les llama motores de propósito general y a este tipo pertenecen la
mayoría de los motores con rotor de jaula de ardilla. A continuación se resumen sus
características:
- Par de arranque normal, baja corriente de arranque y bajo deslizamiento.
- Produce casi el mismo par de arranque que el diseño anterior.
- El par máximo es mayor o igual al 200% el par de carga nominal.
- Deslizamiento bajo (menor del 5%).
- Se prefieren sobre los diseños de clase A por requerir poca corriente de arranque.
DISEÑO CLASE C.
- Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de arranque (de 3.5 a
5 veces la nominal).
- Son construidos con un rotor de doble jaula (más costosos).
- Bajo deslizamiento (menos del 5%) a plena carga.
14
- Debido a su alto par de arranque, acelera rápidamente.
- Cuando se emplea con cargas pesadas, se limita la disipación térmica del motor, ya que la
mayor parte de la corriente se concentra en el devanado superior.
- Tiende a sobrecalentarse con arranques frecuentes.
- Se utilizan para cargas con alto par de arranque, como bombas, compresores y transportadores.
DISEÑO CLASE D.
- También conocidos como de alto par y alta resistencia.
- Alto par de arranque (275% o más del nominal) y baja corriente de arranque.
- Alto deslizamiento a plena carga.
- La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.
- Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en
troqueladoras o cortadoras.
También existen las clases E y F, llamados motores de inducción de arranque suave, pero
obsoletos hoy en día.
1.4.10 Tendencias en el diseño de motores de inducción.
El motor de inducción moderno se construyó entre 1888 y 1895, cuando Nicola
Tesla recibió la patente de sus ideas sobre los motores de inducción. Poco después se introdujo el
rotor de jaula de ardilla, y hacia 1896 estuvieron disponibles en el mercado motores de inducción
trifásicos plenamente reconocidos y funcionales.
Los esfuerzos de mejoramiento de diseño en aquella época hasta 1970, eran enfocados a
disminuir el costo de construcción: calidad de los aceros, técnicas de fundición, etc. Este enfoque
se debió principalmente a que la electricidad no era tan costosa; por lo tanto, el criterio a seguir
para comprar un motor, era su costo directo.
Desde el ascenso del costo de los combustibles en 1973; el costo de operación de las máquinas
ha sido cada vez más importante, dejando a un lado los costos de instalación. Por lo que el nuevo
énfasis ha sido la eficiencia del motor.
Para aumentar la eficiencia de los motores se utilizan técnicas conducentes a reducir las pérdidas
en el cobre, reducir la densidad de flujo magnético para reducir las pérdidas en el núcleo.
Reducir la temperatura de operación utilizando más acero en el estator, reducir las corrientes
parásitas, etc
15
CAPITULO 2. TÉCNICAS DE CONTROL DE LOS MOTORES DE INDUCCIÓN.
2.1 Introducción.
Hasta la llegada de los modernos controladores de estado sólido, los motores de
inducción no eran las máquinas adecuadas para aplicaciones que requerían considerable
control de velocidad. El rango normal de operación de un motor de inducción típico está
confinado a menos de 5% de deslizamiento y la variación de la velocidad en ese rango es más o
menos directamente proporcional a la carga sobre el eje del motor. Aun si el deslizamiento fuera
mayor, la eficiencia del motor sería muy pobre puesto que las pérdidas en el cobre del rotor son
directamente proporcionales al deslizamiento del motor.
Existen sólo dos técnicas para controlar la velocidad de un motor de inducción, una de las cuales
consiste en variar la velocidad sincrónica (velocidad de los campos magnéticos del rotor y del
estator) puesto que la velocidad del rotor siempre permanece cerca de nsinc. La otra técnica
consiste en variar el deslizamiento del motor para una carga dada.
La velocidad sincrónica de un motor de inducción está dada por:
(Ec. 3.0 )
en donde fe es la frecuencia de línea, y P, el número de polos.
Por tanto las únicas formas en que se puede variar la velocidad sincrónica de la máquina son: 1)
cambiando la frecuencia eléctrica y 2) cambiando el número de polos de la máquina. El control
del deslizamiento puede ser llevado a cabo bien sea variando la resistencia del rotor o variando el
voltaje en las terminales del motor [9].
2.1.2 Cambio del número de polos.
Existen dos métodos importantes para cambiar el número de polos en un motor de inducción:
1. El método de polos consecuentes.
2. Devanados de estator múltiples.
El primer método es antiguo (1897) y se basa en el hecho de que el número de polos en los
devanados estatóricos de un motor de inducción se puede cambiar con facilidad en relación 2:1
con sólo efectuar simples cambios en la conexión de las bobinas. En la figura 2.1.2.1 se muestra
el estator de un motor de dos polos adecuado para este método.
Al variar los polos, se produce un funcionamiento relativamente satisfactorio puesto se ha
variado el número de polos tanto del estator como del rotor. Dichos motores polifásicos de jaula
y monofásicos se denominan motores de inducción de velocidad múltiple. Estos motores poseen
devanados estatóricos, específicamente diseñados para la variación de polos mediante los
métodos de conmutación manual y/o automática, en que los diversos devanados estatóricos
primarios se conectan en combinación serie paralelo. Los motores de inducción de velocidad
múltiple son asequibles en combinaciones de velocidad síncrona doblada o cuadriplicada,
mediante la variación de polos.
16
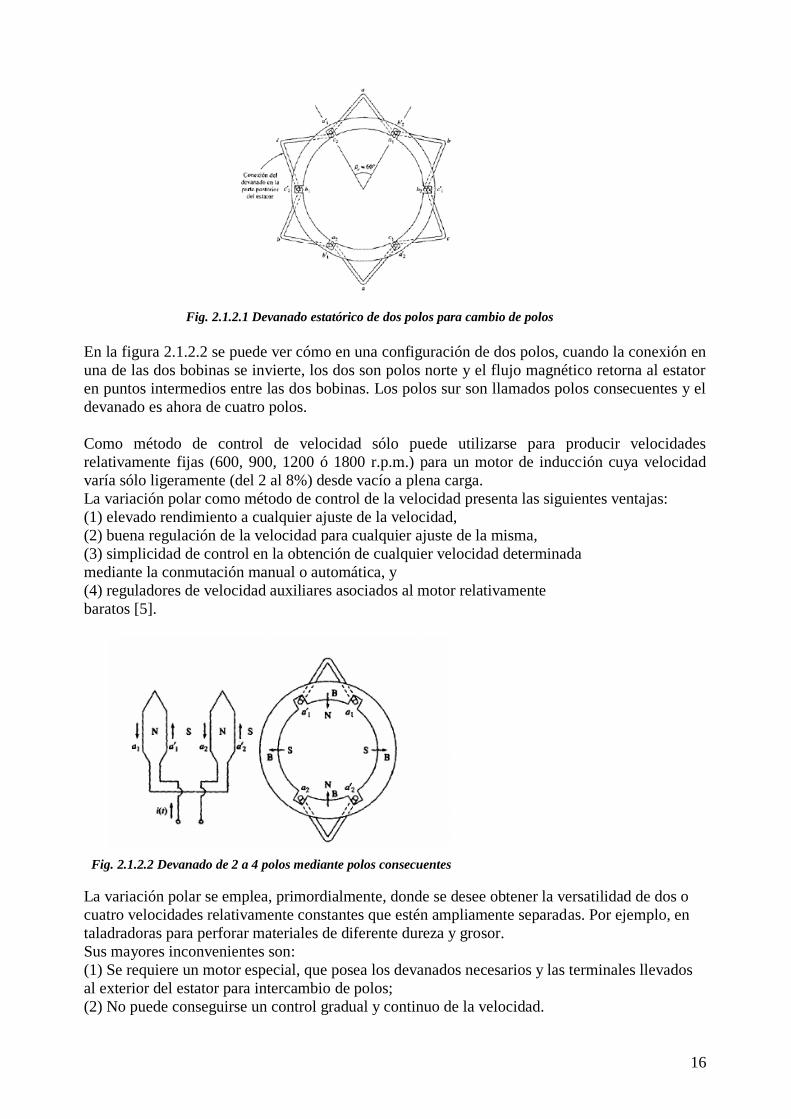
Fig. 2.1.2.1 Devanado estatórico de dos polos para cambio de polos
En la figura 2.1.2.2 se puede ver cómo en una configuración de dos polos, cuando la conexión en
una de las dos bobinas se invierte, los dos son polos norte y el flujo magnético retorna al estator
en puntos intermedios entre las dos bobinas. Los polos sur son llamados polos consecuentes y el
devanado es ahora de cuatro polos.
Como método de control de velocidad sólo puede utilizarse para producir velocidades
relativamente fijas (600, 900, 1200 ó 1800 r.p.m.) para un motor de inducción cuya velocidad
varía sólo ligeramente (del 2 al 8%) desde vacío a plena carga.
La variación polar como método de control de la velocidad presenta las siguientes ventajas:
(1) elevado rendimiento a cualquier ajuste de la velocidad,
(2) buena regulación de la velocidad para cualquier ajuste de la misma,
(3) simplicidad de control en la obtención de cualquier velocidad determinada
mediante la conmutación manual o automática, y
(4) reguladores de velocidad auxiliares asociados al motor relativamente
baratos [5].
Fig. 2.1.2.2 Devanado de 2 a 4 polos mediante polos consecuentes
La variación polar se emplea, primordialmente, donde se desee obtener la versatilidad de dos o
cuatro velocidades relativamente constantes que estén ampliamente separadas. Por ejemplo, en
taladradoras para perforar materiales de diferente dureza y grosor.
Sus mayores inconvenientes son:
(1) Se requiere un motor especial, que posea los devanados necesarios y las terminales llevados
al exterior del estator para intercambio de polos;
(2) No puede conseguirse un control gradual y continuo de la velocidad.
17
Un inconveniente del método de polos consecuentes es que las velocidades obtenidas están en
relación 2:1, y no se pueden conseguir velocidades intermedias mediante los procedimientos de
conmutación. Este inconveniente queda superado mediante la utilización de dos devanados
independientes, cada cual creando un campo y un número de polos total independientes. Por
ejemplo, si hablamos de un motor trifásico de dos devanados, uno de ellos se bobina para cuatro
polos, y el otro, para seis polos. De esta forma, el primer devanado producirá una velocidad
elevada de 1800 r.p.m., mientras que el segundo, una baja de 1200 r.p.m.
Cuando el principio del motor de inducción de velocidad múltiple, de doble devanado, se
combina con el método de conexión de polos consecuentes, se obtiene un total de cuatro
velocidades síncronas (1800, 1200, 900 y 600 r.p.m.)
Los inconvenientes de dicho motor en comparación con el de polos subsecuentes son:
1. Mayor tamaño y peso para la misma potencia de salida (puesto que sólo se emplea un
devanado al mismo tiempo).
2. Costo más elevado debido al mayor tamaño de la carcasa
3. Mayor reactancia de dispersión porque las ranuras necesarias para los dos devanados son más
profundas.
4. Regulación más pobre de la velocidad debido a la mayor reactancia de cada devanado.
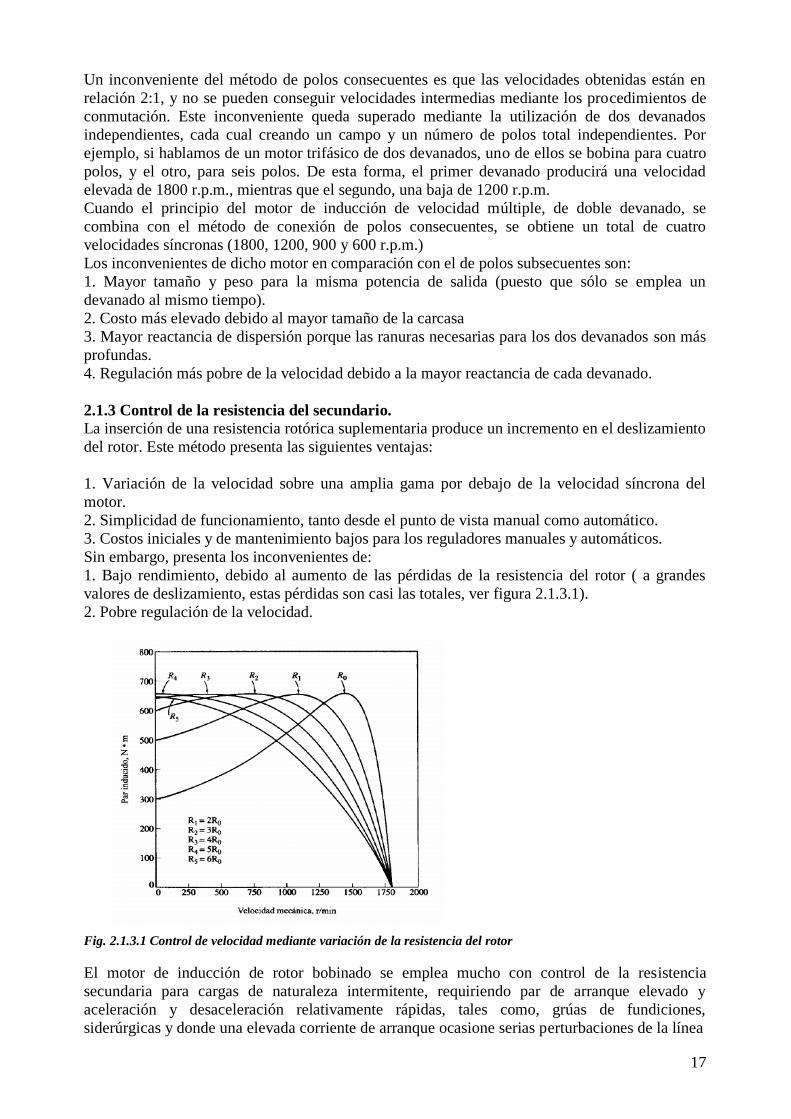
2.1.3 Control de la resistencia del secundario.
La inserción de una resistencia rotórica suplementaria produce un incremento en el deslizamiento
del rotor. Este método presenta las siguientes ventajas:
1. Variación de la velocidad sobre una amplia gama por debajo de la velocidad síncrona del
motor.
2. Simplicidad de funcionamiento, tanto desde el punto de vista manual como automático.
3. Costos iniciales y de mantenimiento bajos para los reguladores manuales y automáticos.
Sin embargo, presenta los inconvenientes de:
1. Bajo rendimiento, debido al aumento de las pérdidas de la resistencia del rotor ( a grandes
valores de deslizamiento, estas pérdidas son casi las totales, ver figura 2.1.3.1).
2. Pobre regulación de la velocidad.
Fig. 2.1.3.1 Control de velocidad mediante variación de la resistencia del rotor
El motor de inducción de rotor bobinado se emplea mucho con control de la resistencia
secundaria para cargas de naturaleza intermitente, requiriendo par de arranque elevado y
aceleración y desaceleración relativamente rápidas, tales como, grúas de fundiciones,
siderúrgicas y donde una elevada corriente de arranque ocasione serias perturbaciones de la línea
18
.
Ya que la velocidad y el deslizamiento de un motor de inducción de rotor bobinado son
proporcionales a la resistencia del rotor, el método de control de la velocidad mediante la
variación de la resistencia secundaria del rotor se denomina a veces control del deslizamiento
.
2.1.4 Control del voltaje de línea.
El par del motor de inducción bajo condiciones de arranque y de marcha varía con el cuadrado
del voltaje aplicado al primario del estator. Para una carga determinada, reduciendo el voltaje de
línea se reducirá el par con el cuadrado de la reducción del voltaje de línea, y la reducción del par
producirá un incremento del deslizamiento. Aunque reducir el voltaje de línea y el par como
método de incrementar el deslizamiento servirá para controlar la velocidad hasta cierto grado en
motores monofásicos de fase partida, particularmente, y en motores de inducción pequeños, en
general, resulta el método menos satisfactorio de control de la velocidad para motores
polifásicos, ya que el par máximo a la mitad del voltaje nominal es un cuarto del mismo a dicha
tensión nominal. Por lo tanto, no es posible obtener el par nominal, ni siquiera la mitad del
mismo, porque la velocidad del motor disminuye rápidamente y éste se para antes de que pueda
desarrollar el par nominal.
Entonces, para que este método funcione, es necesario que el par de carga se reduzca
considerablemente a medida que se reducen el voltaje y la velocidad en el estator; por lo
que funcionará de forma aceptable en un motor parcialmente cargado.
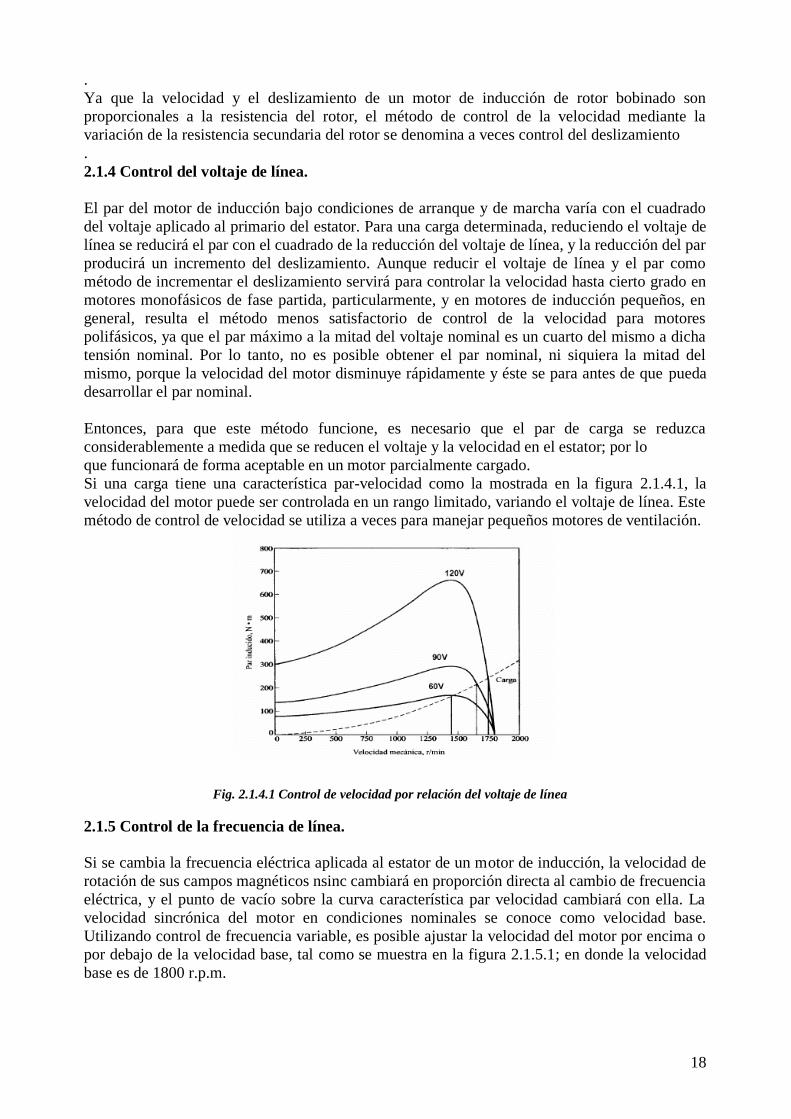
Si una carga tiene una característica par-velocidad como la mostrada en la figura 2.1.4.1, la
velocidad del motor puede ser controlada en un rango limitado, variando el voltaje de línea. Este
método de control de velocidad se utiliza a veces para manejar pequeños motores de ventilación.
Fig. 2.1.4.1 Control de velocidad por relación del voltaje de línea
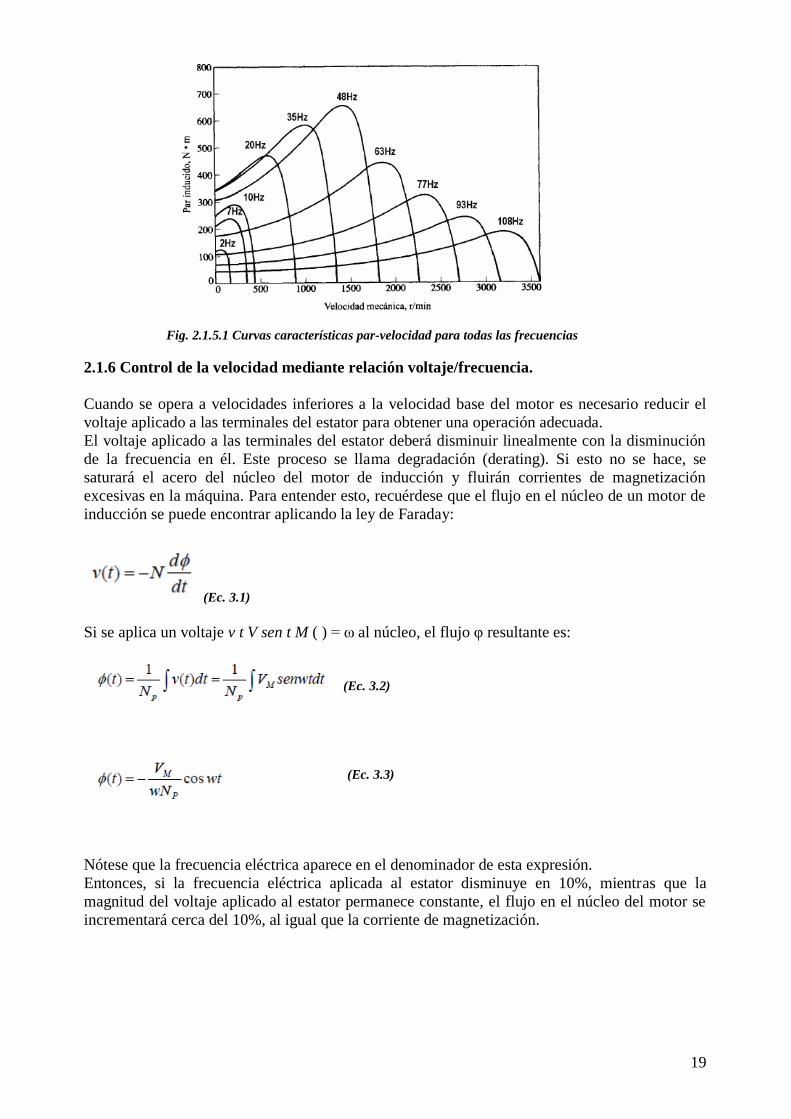
2.1.5 Control de la frecuencia de línea.
Si se cambia la frecuencia eléctrica aplicada al estator de un motor de inducción, la velocidad de
rotación de sus campos magnéticos nsinc cambiará en proporción directa al cambio de frecuencia
eléctrica, y el punto de vacío sobre la curva característica par velocidad cambiará con ella. La
velocidad sincrónica del motor en condiciones nominales se conoce como velocidad base.
Utilizando control de frecuencia variable, es posible ajustar la velocidad del motor por encima o
por debajo de la velocidad base, tal como se muestra en la figura 2.1.5.1; en donde la velocidad
base es de 1800 r.p.m.
19
Fig. 2.1.5.1 Curvas características par-velocidad para todas las frecuencias
2.1.6 Control de la velocidad mediante relación voltaje/frecuencia.
Cuando se opera a velocidades inferiores a la velocidad base del motor es necesario reducir el
voltaje aplicado a las terminales del estator para obtener una operación adecuada.
El voltaje aplicado a las terminales del estator deberá disminuir linealmente con la disminución
de la frecuencia en él. Este proceso se llama degradación (derating). Si esto no se hace, se
saturará el acero del núcleo del motor de inducción y fluirán corrientes de magnetización
excesivas en la máquina. Para entender esto, recuérdese que el flujo en el núcleo de un motor de
inducción se puede encontrar aplicando la ley de Faraday:
(Ec. 3.1)
Si se aplica un voltaje v t V sen t M ( ) = ω al núcleo, el flujo υ resultante es:
(Ec. 3.2)
(Ec. 3.3)
Nótese que la frecuencia eléctrica aparece en el denominador de esta expresión.
Entonces, si la frecuencia eléctrica aplicada al estator disminuye en 10%, mientras que la
magnitud del voltaje aplicado al estator permanece constante, el flujo en el núcleo del motor se
incrementará cerca del 10%, al igual que la corriente de magnetización.
20
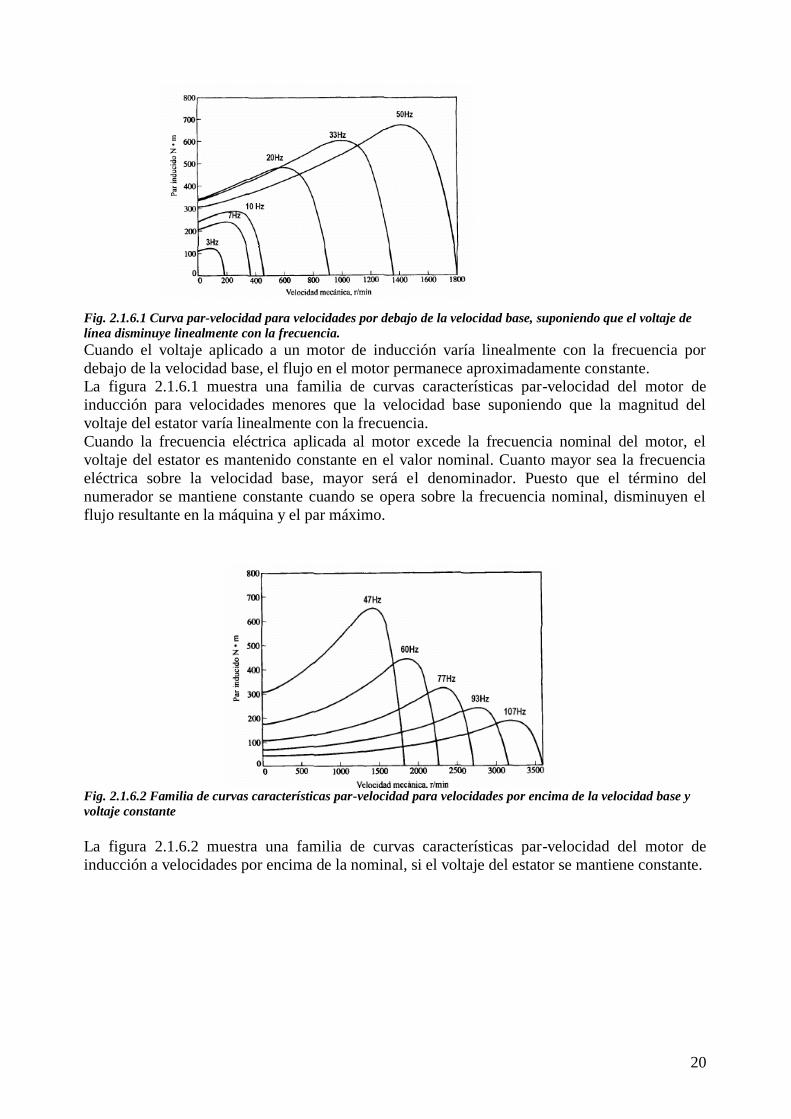
Fig. 2.1.6.1 Curva par-velocidad para velocidades por debajo de la velocidad base, suponiendo que el voltaje de
línea disminuye linealmente con la frecuencia.
Cuando el voltaje aplicado a un motor de inducción varía linealmente con la frecuencia por
debajo de la velocidad base, el flujo en el motor permanece aproximadamente constante. La figura 2.1.6.1 muestra una familia de curvas características par-velocidad del motor de
inducción para velocidades menores que la velocidad base suponiendo que la magnitud del
voltaje del estator varía linealmente con la frecuencia.
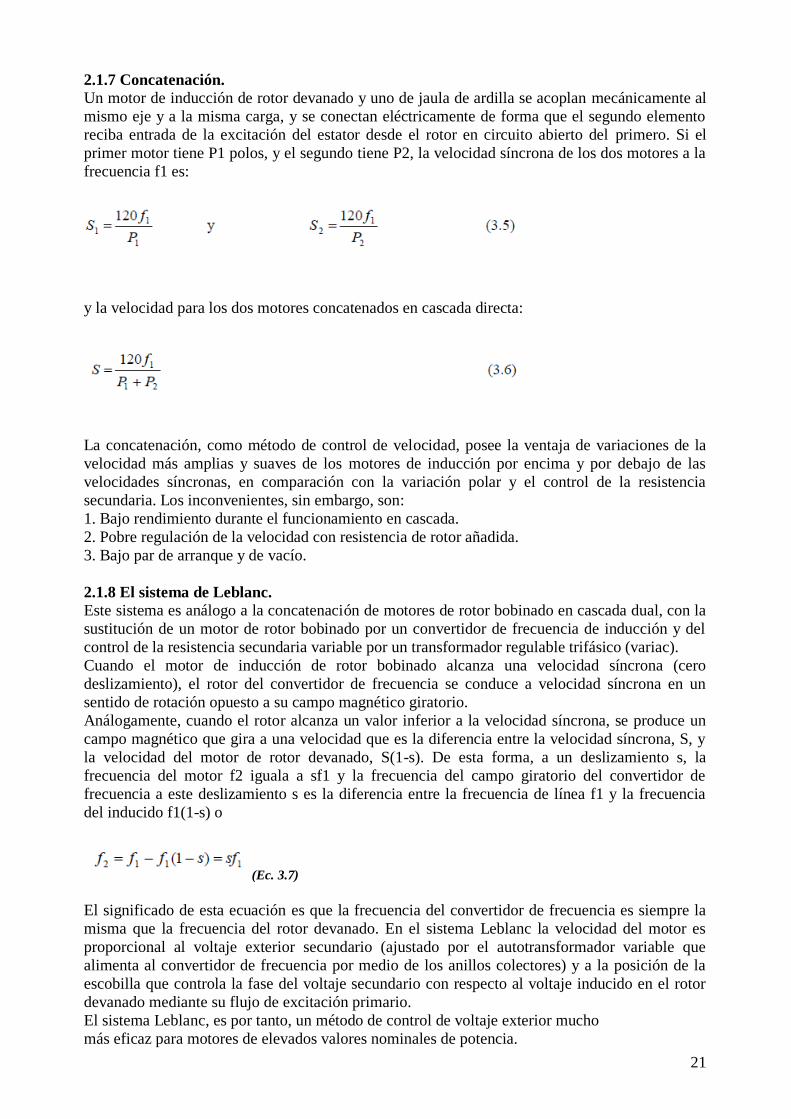
Cuando la frecuencia eléctrica aplicada al motor excede la frecuencia nominal del motor, el
voltaje del estator es mantenido constante en el valor nominal. Cuanto mayor sea la frecuencia
eléctrica sobre la velocidad base, mayor será el denominador. Puesto que el término del
numerador se mantiene constante cuando se opera sobre la frecuencia nominal, disminuyen el
flujo resultante en la máquina y el par máximo.
Fig. 2.1.6.2 Familia de curvas características par-velocidad para velocidades por encima de la velocidad base y
voltaje constante
La figura 2.1.6.2 muestra una familia de curvas características par-velocidad del motor de
inducción a velocidades por encima de la nominal, si el voltaje del estator se mantiene constante.
21
2.1.7 Concatenación.
Un motor de inducción de rotor devanado y uno de jaula de ardilla se acoplan mecánicamente al
mismo eje y a la misma carga, y se conectan eléctricamente de forma que el segundo elemento
reciba entrada de la excitación del estator desde el rotor en circuito abierto del primero. Si el
primer motor tiene P1 polos, y el segundo tiene P2, la velocidad síncrona de los dos motores a la
frecuencia f1 es:
y la velocidad para los dos motores concatenados en cascada directa:
La concatenación, como método de control de velocidad, posee la ventaja de variaciones de la
velocidad más amplias y suaves de los motores de inducción por encima y por debajo de las
velocidades síncronas, en comparación con la variación polar y el control de la resistencia
secundaria. Los inconvenientes, sin embargo, son:
1. Bajo rendimiento durante el funcionamiento en cascada.
2. Pobre regulación de la velocidad con resistencia de rotor añadida.
3. Bajo par de arranque y de vacío.
2.1.8 El sistema de Leblanc.
Este sistema es análogo a la concatenación de motores de rotor bobinado en cascada dual, con la
sustitución de un motor de rotor bobinado por un convertidor de frecuencia de inducción y del
control de la resistencia secundaria variable por un transformador regulable trifásico (variac).
Cuando el motor de inducción de rotor bobinado alcanza una velocidad síncrona (cero
deslizamiento), el rotor del convertidor de frecuencia se conduce a velocidad síncrona en un
sentido de rotación opuesto a su campo magnético giratorio.
Análogamente, cuando el rotor alcanza un valor inferior a la velocidad síncrona, se produce un
campo magnético que gira a una velocidad que es la diferencia entre la velocidad síncrona, S, y
la velocidad del motor de rotor devanado, S(1-s). De esta forma, a un deslizamiento s, la
frecuencia del motor f2 iguala a sf1 y la frecuencia del campo giratorio del convertidor de
frecuencia a este deslizamiento s es la diferencia entre la frecuencia de línea f1 y la frecuencia
del inducido f1(1-s) o
(Ec. 3.7)
El significado de esta ecuación es que la frecuencia del convertidor de frecuencia es siempre la
misma que la frecuencia del rotor devanado. En el sistema Leblanc la velocidad del motor es
proporcional al voltaje exterior secundario (ajustado por el autotransformador variable que
alimenta al convertidor de frecuencia por medio de los anillos colectores) y a la posición de la
escobilla que controla la fase del voltaje secundario con respecto al voltaje inducido en el rotor
devanado mediante su flujo de excitación primario.
El sistema Leblanc, es por tanto, un método de control de voltaje exterior mucho
más eficaz para motores de elevados valores nominales de potencia.
22
2.1.9 El sistema de control de Kramer.
Basado en el principio de Leblanc, este método difiere en que el transformador variable va
conectado a los anillos colectores del motor bobinado en vez de a la línea.
Como en el caso del sistema de Leblanc, la frecuencia del rotor bobinado f2 es también la
frecuencia del voltaje en el conmutador. Decalando la posición de fase de las escobillas se
alterará el factor de potencia del motor de rotor devanado, e incrementado el voltaje aplicado al
rotor del convertidor se incrementará la velocidad. Se pueden conseguir velocidades superiores e
inferiores a la síncrona. Además, el convertidor de frecuencia también actúa como motor al
convertir la potencia que se le suministra a través del auto transformador en potencia mecánica
disponible en el eje.
Las mayores aplicaciones de los sistemas de Leblanc y de Kramer son para grandes motores de
rotor bobinado de 500 CV hasta unos 3000 CV. Las ventajas de devolver la energía al sistema,
además de las bajas pérdidas en línea del convertidor y el autotransformador (el aparato eléctrico
de mayor rendimiento desarrollado hasta el momento), combinado con la ventaja de corrección
del factor de potencia, hace que el sistema de Kramer sea particularmente útil en aplicaciones de
control de la velocidad de elevada potencia. Su mayor inconveniente reside en su elevado costo
inicial.
2.1.10 Sistema de Scherbius.
Este sistema, fruto del sistema de Leblanc y análogo al de Kramer, es totalmente de ca y emplea
un convertidor de frecuencia variable directamente acoplado al motor de rotor bobinado. La
salida de las tres escobillas del convertidor de frecuencia variable va a un convertidor de
regulación de frecuencia acoplado a un motor de inducción de jaula cuyo estator se conecta a la
fuente de alimentación de ca polifásica. Las escobillas del convertidor de regulación de
frecuencia (sf1) están conectadas directamente a los anillos colectores de la máquina de rotor
bobinado (f2=sf1) y también a la excitación del transformador de control de velocidad.
Los inconvenientes son, que no tiene ajuste del factor de potencia y requiere máquinas especiales
no comerciales. Como en los sistemas anteriores de control de deslizamiento de tensión exterior
la energía se devuelve a la línea (regeneración)
.
2.1.11 Control de velocidad por procedimientos mecánicos.
Estos motores se construyen en grupos montados que accionan dispositivos mecánicos
variadores de velocidad, de engranajes, poleas cilíndricas y cónicas e incluso bombas hidráulicas
para producir una salida de velocidad variable.
2.1.12 Control de la velocidad de los motores monofásicos de c.a.
El método principal de control de velocidad empleado para motores monofásicos de inducción es
el control del voltaje de línea. Este método se presta más a los motores monofásicos debido a la
forma en que el rotor de un motor de inducción monofásico desarrolla el par en comparación con
el motor de inducción asíncrono polifásico. Este último tiende a mantener la excitación del rotor a medida que disminuye el voltaje en el estator. El resultado es que el voltaje en el estator debe
reducirse considerablemente antes de que tengan lugar cambios apreciables en el deslizamiento.
Esto, a su vez, reduce el par aún más considerablemente (puesto que el par es proporcional al
cuadrado del voltaje aplicado en el estator) y reduce en sumo grado el valor de potencia eficaz
del motor de inducción polifásico de rotor devanado, o de jaula de ardilla.

23
Fig. 2.1.12.1 Curvas par-deslizamiento para motores de inducción monofásicos con variación del voltaje
primario.
Puesto que el par desarrollado por un motor de inducción monofásico es originado mediante dos
campos magnéticos en oposición, el deslizamiento rotórico de un motor monofásico es más
sensible a la variación de la excitación que el de uno polifásico.
También, ya que el par de un motor de inducción varía con el cuadrado del voltaje aplicado en el
estator (ver figura 2.1.12.1), la curva par-deslizamiento al 50% del voltaje nominal es el 25% de
la correspondiente al voltaje nominal, aproximadamente a todos los valores desde el arranque al
paro en marcha. A medida que aumenta la carga desde carga parcial hasta nominal, el efecto de
una reducción del voltaje, desde el voltaje nominal al 25% de la misma, es el de producir una
mayor disminución de la velocidad al variar el voltaje, hasta aproximadamente la carga nominal
.
2.1.13 Devanado de tomas y reactancia serie.
Existen algunos métodos para controlar la velocidad de motores monofásicos mediante la
reducción del voltaje de línea, ya sea por conmutación manual o automática. Por ejemplo, el
método de devanado de tomas indica que la velocidad más elevada se obtiene cuando todo el
voltaje de alimentación queda aplicado a la sección más pequeña del devanado principal. La
velocidad más baja se obtiene cuando el voltaje de alimentación se aplica al devanado completo.
La explicación de dicha relación reside en la ecuación:
(Ec. 3.8)
que indica que el flujo de excitación, υ , a una determinada frecuencia (f), depende de Eef/N, o
sea volts estatóricos efectivos por espira (N). A medida que disminuye el número de vueltas en el
estator a las que queda aplicada la misma tensión, aumenta el flujo de excitación. En un motor de
inducción, la componente de corriente rotórica en fase con el flujo de excitación ( cosθ ) r I , así
como el par (T), son función del flujo de excitación:
24
(Ec. 3.9)
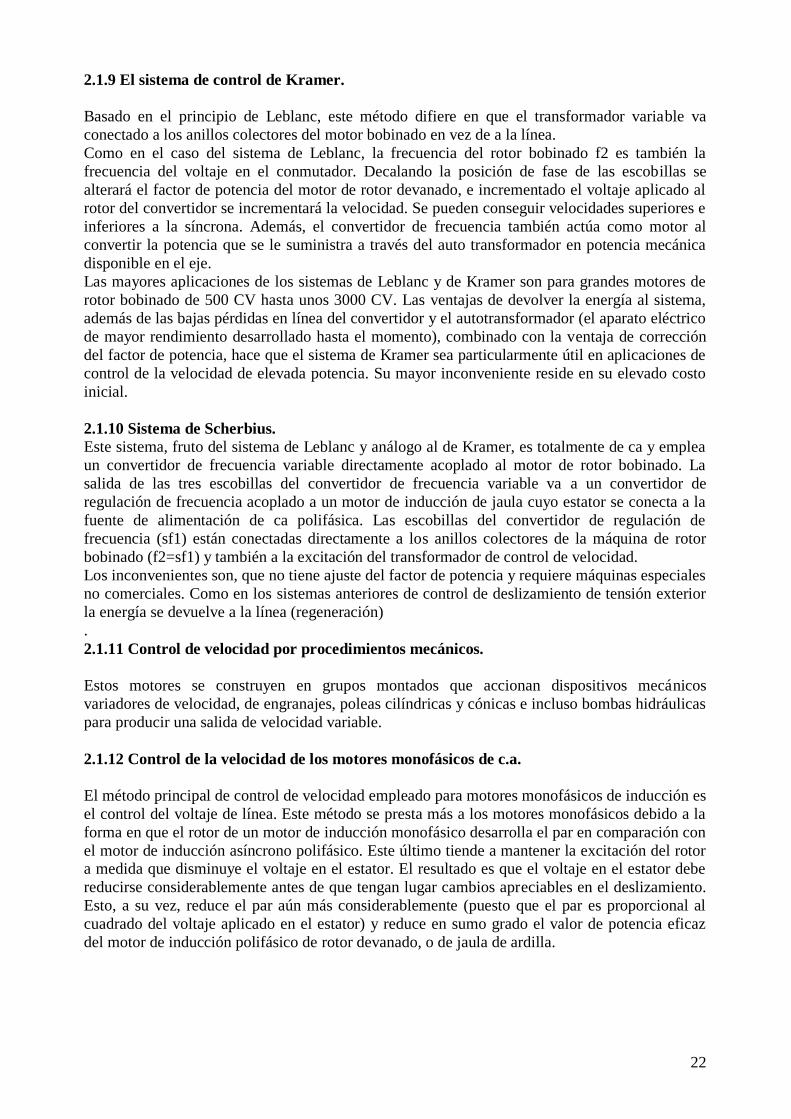
Por tanto, para una carga determinada se produce más par y menor deslizamiento con una mayor
relación de volt por espira. La velocidad, es por tanto mayor cuando se emplea el menor número
de espiras para una tensión determinada aplicada al estator de c.a. En la figura 2.1.13.1, cuando
está abierto el contacto H y se cierran los contactos M (velocidad media) o L (baja velocidad), la
velocidad del motor disminuye proporcionalmente con la disminución del par desarrollado. El
devanado principal de tomas se bobina de tal forma que incluso la sección pequeña (de elevada
velocidad) queda uniformemente distribuida alrededor del estator y el devanado se proyecta para
soportar el voltaje nominal sin sobre calentamiento.
Fig. 2.1.13.1 Devanado principal de tomas
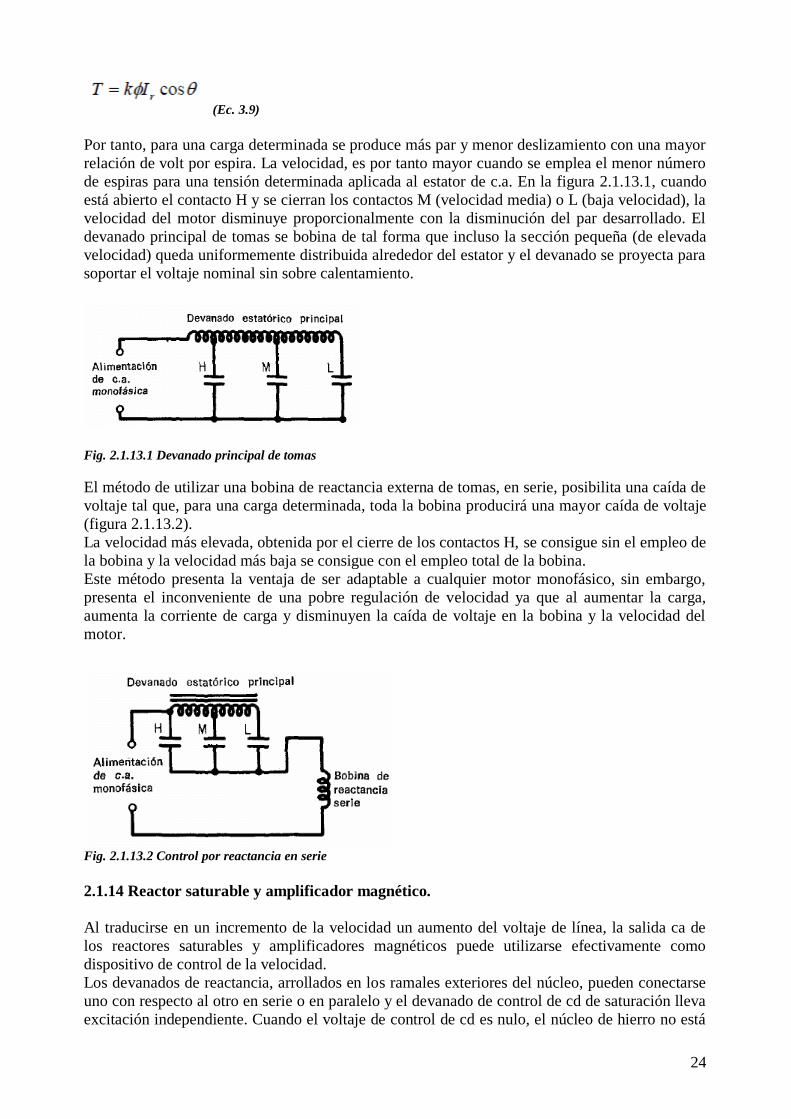
El método de utilizar una bobina de reactancia externa de tomas, en serie, posibilita una caída de
voltaje tal que, para una carga determinada, toda la bobina producirá una mayor caída de voltaje
(figura 2.1.13.2).
La velocidad más elevada, obtenida por el cierre de los contactos H, se consigue sin el empleo de
la bobina y la velocidad más baja se consigue con el empleo total de la bobina.
Este método presenta la ventaja de ser adaptable a cualquier motor monofásico, sin embargo,
presenta el inconveniente de una pobre regulación de velocidad ya que al aumentar la carga,
aumenta la corriente de carga y disminuyen la caída de voltaje en la bobina y la velocidad del
motor.
Fig. 2.1.13.2 Control por reactancia en serie
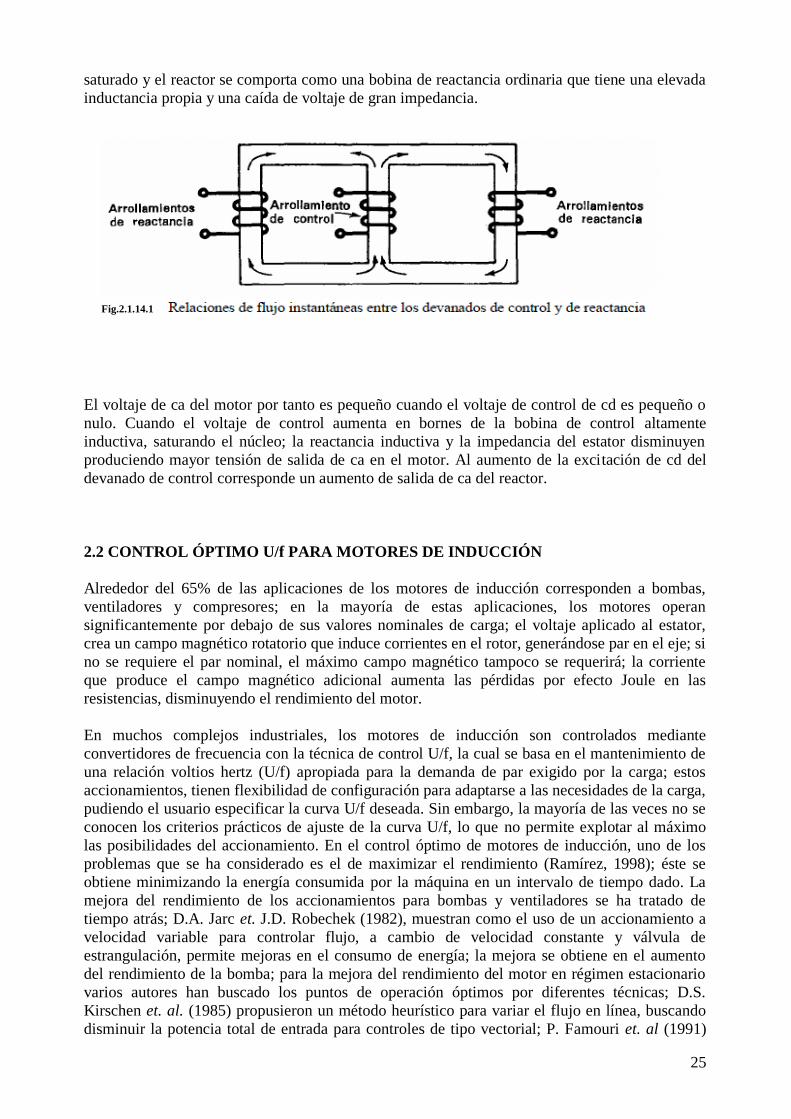
2.1.14 Reactor saturable y amplificador magnético.
Al traducirse en un incremento de la velocidad un aumento del voltaje de línea, la salida ca de
los reactores saturables y amplificadores magnéticos puede utilizarse efectivamente como
dispositivo de control de la velocidad.
Los devanados de reactancia, arrollados en los ramales exteriores del núcleo, pueden conectarse
uno con respecto al otro en serie o en paralelo y el devanado de control de cd de saturación lleva
excitación independiente. Cuando el voltaje de control de cd es nulo, el núcleo de hierro no está
25
saturado y el reactor se comporta como una bobina de reactancia ordinaria que tiene una elevada
inductancia propia y una caída de voltaje de gran impedancia.
El voltaje de ca del motor por tanto es pequeño cuando el voltaje de control de cd es pequeño o
nulo. Cuando el voltaje de control aumenta en bornes de la bobina de control altamente
inductiva, saturando el núcleo; la reactancia inductiva y la impedancia del estator disminuyen
produciendo mayor tensión de salida de ca en el motor. Al aumento de la excitación de cd del
devanado de control corresponde un aumento de salida de ca del reactor.
2.2 CONTROL ÓPTIMO U/f PARA MOTORES DE INDUCCIÓN
Alrededor del 65% de las aplicaciones de los motores de inducción corresponden a bombas,
ventiladores y compresores; en la mayoría de estas aplicaciones, los motores operan
significantemente por debajo de sus valores nominales de carga; el voltaje aplicado al estator,
crea un campo magnético rotatorio que induce corrientes en el rotor, generándose par en el eje; si
no se requiere el par nominal, el máximo campo magnético tampoco se requerirá; la corriente
que produce el campo magnético adicional aumenta las pérdidas por efecto Joule en las
resistencias, disminuyendo el rendimiento del motor.
En muchos complejos industriales, los motores de inducción son controlados mediante
convertidores de frecuencia con la técnica de control U/f, la cual se basa en el mantenimiento de
una relación voltios hertz (U/f) apropiada para la demanda de par exigido por la carga; estos
accionamientos, tienen flexibilidad de configuración para adaptarse a las necesidades de la carga,
pudiendo el usuario especificar la curva U/f deseada. Sin embargo, la mayoría de las veces no se
conocen los criterios prácticos de ajuste de la curva U/f, lo que no permite explotar al máximo
las posibilidades del accionamiento. En el control óptimo de motores de inducción, uno de los
problemas que se ha considerado es el de maximizar el rendimiento (Ramírez, 1998); éste se
obtiene minimizando la energía consumida por la máquina en un intervalo de tiempo dado. La
mejora del rendimiento de los accionamientos para bombas y ventiladores se ha tratado de
tiempo atrás; D.A. Jarc et. J.D. Robechek (1982), muestran como el uso de un accionamiento a
velocidad variable para controlar flujo, a cambio de velocidad constante y válvula de
estrangulación, permite mejoras en el consumo de energía; la mejora se obtiene en el aumento
del rendimiento de la bomba; para la mejora del rendimiento del motor en régimen estacionario
varios autores han buscado los puntos de operación óptimos por diferentes técnicas; D.S.
Kirschen et. al. (1985) propusieron un método heurístico para variar el flujo en línea, buscando
disminuir la potencia total de entrada para controles de tipo vectorial; P. Famouri et. al (1991)
Fig.2.1.14.1
26
utilizan las ideas de Kirschen para obtener el deslizamiento óptimo para un control U/f; M.H.
Park et. S.K. Sul (1984) obtienen, experimentalmente, los deslizamientos óptimos para diferentes
puntos de operación en controles U/f; otros autores han atacado el problema de manera analítica;
A. Kusko et. D. Galler (1983) calculan el deslizamiento óptimo que minimiza las pérdidas por
efecto Joule de la máquina; S.I. Seleme Jr. et. C. Canudas de Wit (1992) consideran
adicionalmente la energía magnética almacenada en las inductancias; García et. al. (1992)
consideraron adicionalmente las pérdidas en el núcleo.
La mayoría de los algoritmos heurísticos fueron validados en bancos de prueba de laboratorio;
estos algoritmos resultan relativamente complejos para su aplicación en un accionamiento
industrial comercial con control U/f; aunque algunos de los resultados teóricos son relativamente
simples de implementar, no se conocen reportes de su aplicación en accionamientos industriales
comerciales. A continuación se presenta un resultado sencillo que permite calcular una curva
óptima U/f que mejore el rendimiento del motor cuando éste acciona bombas centrífugas o
ventiladores, donde el par varía con el cuadrado de la velocidad; en la sección 2 se revisa
brevemente la técnica de control U/f
2.2.1 TECNICA DE CONTROL VOLTIOS HERTZ
La técnica de control Voltios/Hertz (U/f) se basa en un modelo estático del motor en el que se
considera despreciable la resistencia de estator Rs, y se asumen voltajes de estator sinusoidales y
simétricos. Cuando un motor hace parte de un accionamiento de velocidad variable, la magnitud
RMS del voltaje de estator Us y su frecuencia wa pueden diferir de sus valores nominales Us0,
wa0; entonces el par normalizado en estado estable está dado por la expresión (Leonhard, 1985):
(Ec. 4.0)
Donde yp0 es el par máximo al voltaje y frecuencia nominales; S/Sp es el valor normalizado del
deslizamiento (Sp es el deslizamiento para el cual el par es máximo), dado por:
(Ec. 4.1)
Donde σ es el factor de dispersión del motor, Lr la inductancia en el rotor, Rr la resistencia de
rotor y ws la frecuencia en el rotor o frecuencia de deslizamiento. Considerando la resistencia de
estator Rs despreciable, la magnitud del flujo del estator se puede escribir como (Vas, 1992):
(Ec. 4.2)
Donde k es una constante de proporción; sustituyendo la ecuación (3) en (1), se puede
observar que el par varía con el cuadrado del flujo; por tanto el par se puede expresar:
(Ec. 4.3)

27
k1 y k2 son constantes.
Esta ecuación sugiere dos formas posibles de control:
1.) Mantener el flujo constante y usar el deslizamiento para variar el par y la velocidad.
2.) Mantener el deslizamiento constante, usando el flujo para variar el par y la velocidad.
La primera es la forma clásica del control U/f; la segunda permite adecuar el estado magnético
de la máquina con el punto de operación de par y velocidad, lo que mejora su rendimiento; es
esta estrategia la que se discutirá con más detalle en la siguiente sección.
Aparte de lo anterior, hay que considerar que la relación U/f tiene otras restricciones, por
ejemplo, a baja velocidad debe compensarse la caída de tensión en RS para mantener el flujo
deseado debido a que la resistencia de estator se porta dominante frente a la inductancia
magnetizante; por otro lado, el flujo debe reducirse a alta velocidad debido a que los actuadores
(inversores) tienen un límite de tensión posible a suministrar.
La figura 2.2.1.1 muestra un diagrama de bloques de la técnica de control U/f donde el bloque
“función generador” debe considerar los casos mencionados.
Fig. 2.2.1.1 Diagrama de bloques del control U/f
La idea básica es, por tanto, imponer la magnitud de la tensión Us y la frecuencia wa apropiados
para imponer una velocidad deseada vía la frecuencia de deslizamiento, y un flujo apropiado vía
la magnitud de la tensión. La técnica de control Voltios/Hertz, es una técnica sencilla y muy
simple de implementar; aprovechando dicha característica se tratará, en la siguiente sección, de
encontrar la relación de voltaje y frecuencia a aplicar para obtener el mejor rendimiento del
motor cuando éste acciona una bomba centrífuga o un ventilador.
2.2.2 CARACTERISTICA U/f OPTIMA
Seleme Jr. y Canudas de Wit (1992), obtuvieron la magnitud del flujo de rotor, con la cual se
alcanza la condición de operación a mínima energía:
28
(Ec. 4.4)
Donde β es una constante; note que esta condición exige variar la magnitud del flujo de la
máquina en función del par generado; considerando la resistencia de estator despreciable y la
reactancia magnetizante muy grande respecto a la reactancia de dispersión, el flujo de estator se
puede aproximar a:
(Ec. 4.5)
de (4.0), (4.4) y (4.5) se observa que el motor opera a deslizamiento normalizado S/Sp constante,
lo que significa, frecuencia de deslizamiento ws constante. Si el par es constante, de acuerdo con
la ecuación (4.4) el flujo debe ser constante y por ende, la relación U/f pero si el par varía con el
cuadrado de la velocidad como es el caso de bombas centrífugas y ventiladores, el flujo de
estator será:
(Ec. 4.6)
por tanto, el flujo del estator debe variar proporcionalmente con la velocidad, de modo que el
voltaje de estator que se debe aplicar al motor para obtener flujo óptimo es:
por otro lado (Ec. 4.7) (Ec. 4.8)
donde υ es el número de pares de polos; entonces:
(Ec. 4.9)
Donde la frecuencia de deslizamiento permanece constante en su valor nominal ws0 en todo el
rango de velocidad. En general, el motor de inducción presenta su máxima eficiencia entre el
75% y el 100% del par nominal; se puede por tanto, especificar k5 para el punto nominal de la
máquina:
(Ec. 5.0)
Un motor de inducción trifásico jaula de ardilla, con los siguientes datos de placa: 1/4 HP, 2870
r.p.m., 220 V., 50 Hz., Conectado en estrella con neutro aislado. Rs =9.88_, Rr =8.78_,
Ls=0.898H, Lr=0.917H, Lm=0.860H. Un generador de corriente directa de excitación
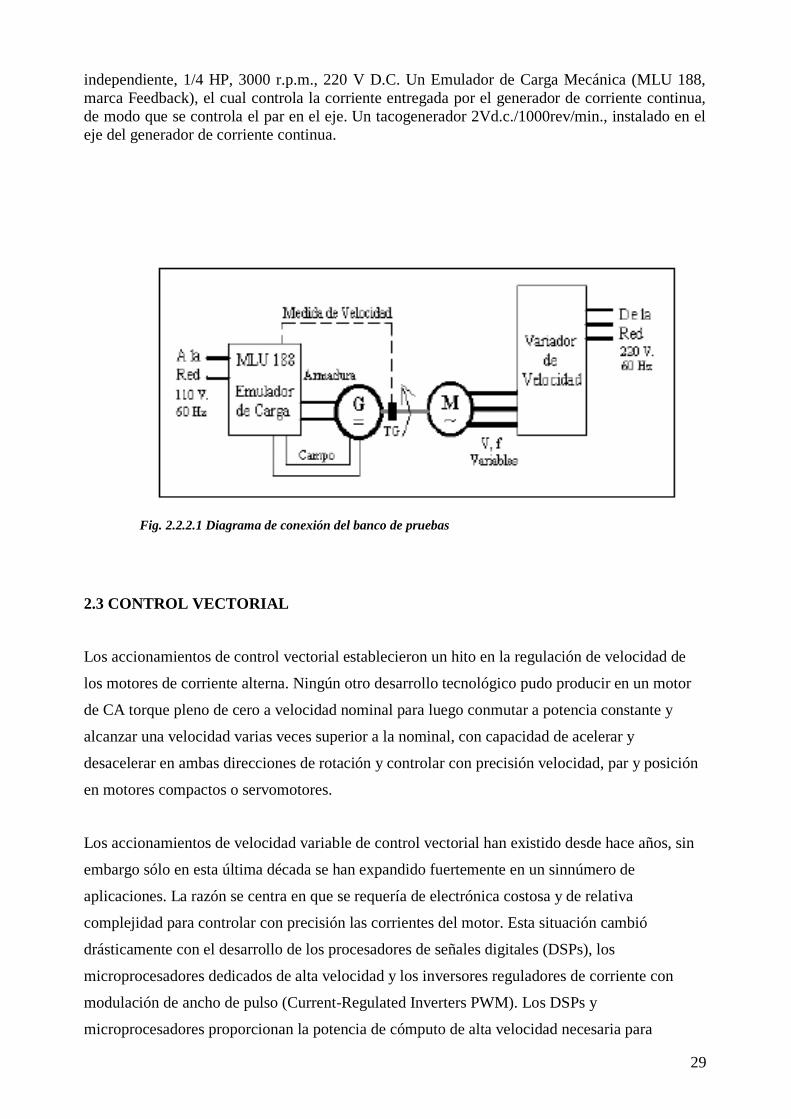
29
independiente, 1/4 HP, 3000 r.p.m., 220 V D.C. Un Emulador de Carga Mecánica (MLU 188,
marca Feedback), el cual controla la corriente entregada por el generador de corriente continua,
de modo que se controla el par en el eje. Un tacogenerador 2Vd.c./1000rev/min., instalado en el
eje del generador de corriente continua.
Fig. 2.2.2.1 Diagrama de conexión del banco de pruebas
2.3 CONTROL VECTORIAL
Los accionamientos de control vectorial establecieron un hito en la regulación de velocidad de
los motores de corriente alterna. Ningún otro desarrollo tecnológico pudo producir en un motor
de CA torque pleno de cero a velocidad nominal para luego conmutar a potencia constante y
alcanzar una velocidad varias veces superior a la nominal, con capacidad de acelerar y
desacelerar en ambas direcciones de rotación y controlar con precisión velocidad, par y posición
en motores compactos o servomotores.
Los accionamientos de velocidad variable de control vectorial han existido desde hace años, sin
embargo sólo en esta última década se han expandido fuertemente en un sinnúmero de
aplicaciones. La razón se centra en que se requería de electrónica costosa y de relativa
complejidad para controlar con precisión las corrientes del motor. Esta situación cambió
drásticamente con el desarrollo de los procesadores de señales digitales (DSPs), los
microprocesadores dedicados de alta velocidad y los inversores reguladores de corriente con
modulación de ancho de pulso (Current-Regulated Inverters PWM). Los DSPs y
microprocesadores proporcionan la potencia de cómputo de alta velocidad necesaria para
30
calcular las corrientes de fase del motor accionado, superando holgadamente los problemas de
derivas y de ajuste de set-point tan frecuentes en las antiguas versiones analógicas de
accionamientos vectoriales.
Complementariamente los inversores PWM con etapas de potencia desarrolladas en torno a
dispositivos semiconductores de alta velocidad de conmutación (Transistores Bipolares de
Compuerta Aislada - IGBT) permiten obtener frecuencias más altas y corrientes de salida
mayores, en volumen reducido y con menor costo.
Los motores trifásicos de inducción se encuentran ampliamente difundidos debido a su
construcción más simple y robusta, su menor tamaño y la menos frecuente necesidad de
mantenimiento, como contrapartida su modelo eléctrico es fuertemente alineal, multivariable y
altamente acoplado, tornando complejo el control de velocidad. A diferencia de ello, el control
de velocidad de los motores de corriente continua de excitación independiente resulta
esencialmente sencillo: la independencia existente entre los bobinados de campo y armadura
permite controlar por separado las corrientes que generan el flujo de magnetización por un lado y
el par por otro. Gobernando estas variables se tiene control completo del motor accionado,
observándose respuestas dinámicas muy veloces con reducidas oscilaciones.
La estrategia de control vectorial se basa en extrapolar la técnica de control de motores de
corriente continua al ámbito de los motores de inducción. Para ello y debido a que una máquina
de corriente alterna carece de dos bobinados desacoplados se recurre al expediente de referenciar
el sistema trifásico alterno de corrientes estatóricas a un sistema de coordenadas no estacionario
que gira sincrónicamente con el campo magnético rotórico. En este nuevo sistema de referencia
las corrientes estatóricas pueden ser tratadas como vectores rotantes, de ahí el nombre de control
vectorial o también control de campo orientado.
El paso siguiente es descomponer este vector en dos componentes: una colineal con el campo
rotórico (normalmente denominada Im) y la restante en cuadratura (normalmente Iw). La
primera resulta ser responsable del flujo magnético de la máquina y se la designa como corriente
de magnetización, la segunda genera el par motriz y se la llama corriente activa. Por la vía de
esta transformación de coordenadas resulta entonces posible desacoplar el modelo matemático de
la máquina de inducción y controlar estas componentes en forma independiente de la misma
manera que en un motor de corriente continua se controlan las corrientes de campo y armadura,
obteniéndose similares respuestas dinámicas. Una vez determinados en este sistema de referencia
no estacionario los valores requeridos de Im e Iw se aplica una transformación de coordenadas
inversa que arroja por resultado las consignas (set-points) de magnitud y fase de las corrientes
31
alternas estatóricas.
Estas consignas se aplican a la entrada del inversor regulador de corriente quién genera como
respuesta las señales PWM de disparo que atacarán los IGBTs de la etapa de potencia generando
las tensiones que alimentan los bobinados del motor. Cabe aquí mencionar que para poder
ejecutar las rutinas de transformación de coordenadas es necesario contar con el ángulo
desarrollado por el rotor, esta necesidad da origen a dos estrategias diferentes: registrar este
ángulo instante a instante mediante un encoder o tacogenerador (Control vectorial de lazo
cerrado) o estimarlo mediante un observador (Control vectorial sin sensor o de lazo abierto o en
su versión en inglés, más difundida, Sensor Less Vector Control).
Mediante la técnica de lazo cerrado resulta posible ejecutar distintas estrategias de control de
acuerdo a la variable que se desea regular, así nos encontramos con control de lazo cerrado de
velocidad o de par.
En muchas aplicaciones se presenta la inquietud sobre si es necesario o no utilizar un sensor de
velocidad, esto es, si realmente es necesaria una estrategia de control vectorial de lazo cerrado.
Se indican a continuación algunos ejemplos a modo de ayuda para definir el uso del mismo:
· Requerimiento de elevado nivel de precisión en el ajuste de velocidad, típicamente superior al
0.001% (maquinaria de alta precisión)
· Requerimiento de alta performance dinámica aún a bajas velocidades, del orden de los 20 mseg
(trenes de laminación)
· Requerimiento de elevado par motriz a velocidades inferiores al 10% de la velocidad nominal
del motor, aún a velocidad cero (grúas con funciones de posicionamiento)
· Requerimiento de control de par en un rango mayor a 1:10 (bobinadoras, control de tensión de
lazo cerrado)
2.3.1Control escalar y control vectorial
Existen varias formas de controlar un motor de inducción en base al par, a la velocidad o a la
posición y pueden ser agrupadas en dos grandes categorías, el control escalar y el control
vectorial.
El control escalar se basa en que las variables son controladas solo en magnitud. Entre los
métodos conocidos de control de un motor de inducción, uno de los mas utilizados es el de
Voltaje/Frecuencia, el cual consiste en que, variando el voltaje del estator en proporción con la
frecuencia, el par (torque) se mantiene constante. Este método tiene como inconvenientes la baja
eficiencia y un tiempo de reacción elevado para variaciones de la carga.
32
El control vectorial, por su parte, se basa en que las variables son controladas tanto en magnitud
como en fase. Las variables a controlar son representadas por matrices y vectores y se toma en
cuenta no solo el comportamiento del motor en estado estable, sino las ecuaciones matemáticas
reales que lo caracterizan. Como resultado se obtiene un mejor comportamiento dinámico para
variaciones de par en un rango de velocidad más amplio.
Algunas de las ventajas del control vectorial son:
1- Capacidad completa del par (torque) del motor a baja velocidad.
2- Mejor comportamiento dinámico.
3- Alta eficiencia para cada punto de operación en un amplio rango de velocidad.
4- Desacople del flujo y el par.
Aunque los motores de inducción tienen una estructura simple, su modelo matemático es
complejo debido al grado de acoplamiento entre un gran número de variables y el
comportamiento no lineal de las mismas.
La utilización de los motores síncronos de corriente alterna ha estado limitada tradicionalmente a
aplicaciones industriales de velocidad constante. Sin embargo, la actuación sobre su
alimentación permite controlar sus parámetros dinámicos y su forma de funcionamiento. Estas
técnicas de control requieren un modelo preciso del motor y procesadores de gran capacidad para
realizar los cálculos en tiempo real.
El desarrollo de nuevas familias de procesadores específicos de señal de gama alta dedicadas a
este propósito, ha hecho posible la implantación de estos sistemas en el ámbito industrial.
Los motores síncronos de corriente alterna han sido utilizados desde su aparición en aplicaciones
industriales de velocidad constante, debido a su constitución y a su modo de funcionamiento.
Gracias a la actuación sobre su alimentación podemos modificar sus parámetros y su forma de
funcionar.
El control vectorial permite controlar su respuesta dinámica, convirtiéndolos en unos serios
competidores de los motores de corriente continua en su propio campo de aplicación.
Esta técnica de control presenta dos inconvenientes:
33
Por una parte es necesario disponer de un modelo preciso del motor y, por otra, se necesitan
procesadores de gran capacidad para poder realizar todos los cálculos que conlleva el control en
tiempo real.
Para cubrir estas necesidades de la industria, los fabricantes de motores han realizado un
esfuerzo en la especificación de los parámetros de sus motores. Y los fabricantes de dispositivos
electrónicos más importantes han puesto en el mercado nuevos modelos de microprocesadores
específicos DSP para esta tarea, ofreciendo una amplia gama para la elección del dispositivo más
adecuado.
Los motores de AC trifásicos se dividen en una parte móvil (rotor) y una fija (estator), y
clásicamente se describían atendiendo a las magnitudes electromagnéticas que se establecían en
las bobinas de cada una.
En los motores síncronos la velocidad de giro viene directamente determinada por la frecuencia
eléctrica del estator (alimentación) y su número de polos. Por tanto, hasta hace poco, la única
forma de controlar su velocidad era modificando el valor de la magnitud y la frecuencia de la
alimentación trifásica con métodos analógicos.
El control vectorial es la herramienta que permite controlar de forma óptima los parámetros del
motor, al no considerar únicamente su funcionamiento estático ante la corriente trifásica.
Fundamentándose en un modelo preciso del motor, considera de forma independiente la
actuación sobre sus tres fases y expresa y maneja de forma compacta el resto de variables de fase
gracias a la teoría del marco de referencia.
La teoría del marco de referencia se basa en la simplificación del modelo de variables de fase del
motor, mediante la aplicación consecutiva de dos transformaciones:
1) Debido a la conexión en estrella de las bobinas del estator, aparece una ligadura que nos
permite convertir el sistema trifásico en un sistema de referencia ortogonal (Transformación de
Clarke abc).
2) A continuación se aplica una rotación de ángulo igual a la posición angular de la fase en ese
instante (Transformación de Park dq).
El control vectorial es el más complejo y el que requiere mayor potencia de cálculo. A su vez
también es la que mejor control proporciona. El problema principal que presenta la conmutación
sinusoidal es que intenta controlar directamente las corrientes que circulan por el motor, las
cuales son intrínsecamente variantes en el tiempo. Al aumentar la velocidad del motor, y por
tanto la frecuencia de las corrientes, empiezan a aparecer problemas.
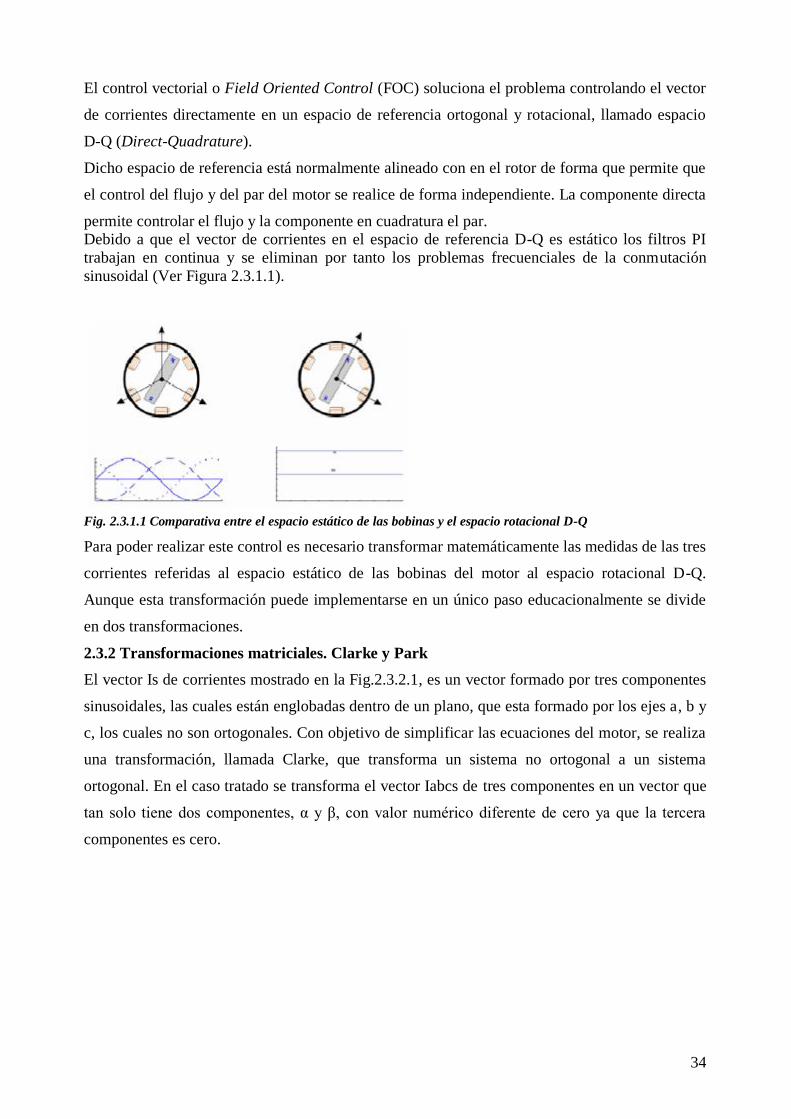
34
El control vectorial o Field Oriented Control (FOC) soluciona el problema controlando el vector
de corrientes directamente en un espacio de referencia ortogonal y rotacional, llamado espacio
D-Q (Direct-Quadrature).
Dicho espacio de referencia está normalmente alineado con en el rotor de forma que permite que
el control del flujo y del par del motor se realice de forma independiente. La componente directa
permite controlar el flujo y la componente en cuadratura el par. Debido a que el vector de corrientes en el espacio de referencia D-Q es estático los filtros PI
trabajan en continua y se eliminan por tanto los problemas frecuenciales de la conmutación
sinusoidal (Ver Figura 2.3.1.1).
Fig. 2.3.1.1 Comparativa entre el espacio estático de las bobinas y el espacio rotacional D-Q
Para poder realizar este control es necesario transformar matemáticamente las medidas de las tres
corrientes referidas al espacio estático de las bobinas del motor al espacio rotacional D-Q.
Aunque esta transformación puede implementarse en un único paso educacionalmente se divide
en dos transformaciones.
2.3.2 Transformaciones matriciales. Clarke y Park
El vector Is de corrientes mostrado en la Fig.2.3.2.1, es un vector formado por tres componentes
sinusoidales, las cuales están englobadas dentro de un plano, que esta formado por los ejes a, b y
c, los cuales no son ortogonales. Con objetivo de simplificar las ecuaciones del motor, se realiza
una transformación, llamada Clarke, que transforma un sistema no ortogonal a un sistema
ortogonal. En el caso tratado se transforma el vector Iabcs de tres componentes en un vector que
tan solo tiene dos componentes, α y β, con valor numérico diferente de cero ya que la tercera
componentes es cero.
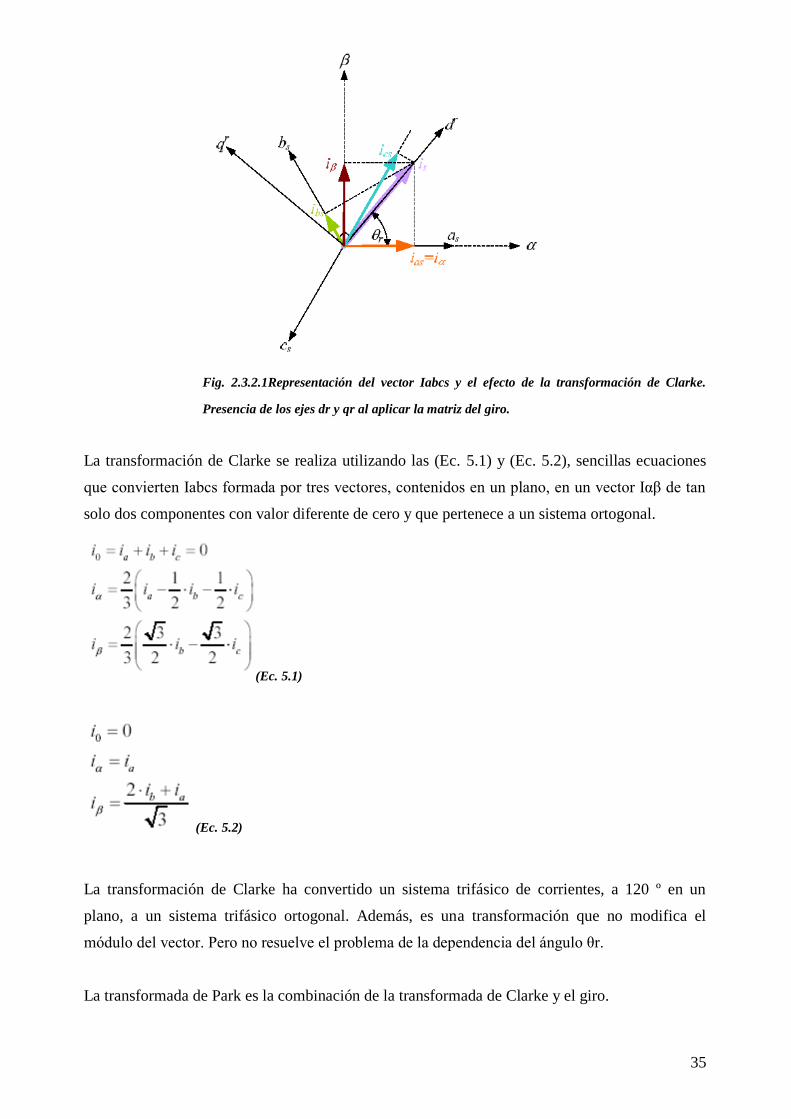
35
Fig. 2.3.2.1Representación del vector Iabcs y el efecto de la transformación de Clarke.
Presencia de los ejes dr y qr al aplicar la matriz del giro.
La transformación de Clarke se realiza utilizando las (Ec. 5.1) y (Ec. 5.2), sencillas ecuaciones
que convierten Iabcs formada por tres vectores, contenidos en un plano, en un vector Iαβ de tan
solo dos componentes con valor diferente de cero y que pertenece a un sistema ortogonal.
(Ec. 5.1)
(Ec. 5.2)
La transformación de Clarke ha convertido un sistema trifásico de corrientes, a 120 º en un
plano, a un sistema trifásico ortogonal. Además, es una transformación que no modifica el
módulo del vector. Pero no resuelve el problema de la dependencia del ángulo θr.
La transformada de Park es la combinación de la transformada de Clarke y el giro.

36
Transformada que convierte un sistema trifásico estacionario en un sistema trifásico ortogonal
que gira en sincronismo con la θr del rotor. Además esta transformación se aplica en forma de
matriz a cualquier variable v y i. Obsérvese el cambio de nomenclatura de las tensiones y las
corrientes, pues tan solo viene a ser un cambio de ejes y un giro, sencillas operaciones
algebraicas y geométricas, pero con un claro significado físico. Las ecuaciones de la
transformación de Park son las siguientes:
(Ec. 5.3)
(Ec. 5.4)
A continuación se aplicará la transformación de Park al sistema de ecuaciones del motor. Los
pasos seguidos en la aplicación de la transformación se ha desglosado en las partes más
elementales para facilitar el seguimiento.

37
Finalmente se obtiene un sistema de ecuaciones con las propiedades deseadas, las cuales eran:
hacer desparecer los términos que dependen del ángulo θr (que es variable en el tiempo), los
valores de las tensiones y las corrientes son constantes y no variables, el sistema de ecuaciones
pasa a ser lineal por lo tanto más manipulable y analizable. Obsérvese que el único término que
no había aparecido hasta el momento es ùr, éste término tan solo es la derivada de θr, además se
trabajará con los nuevos ejes 0, d y q que viene a ser los mismos ejes dr y qr pero adaptados a las
matrices. El sistema de ecuaciones final es el siguiente:
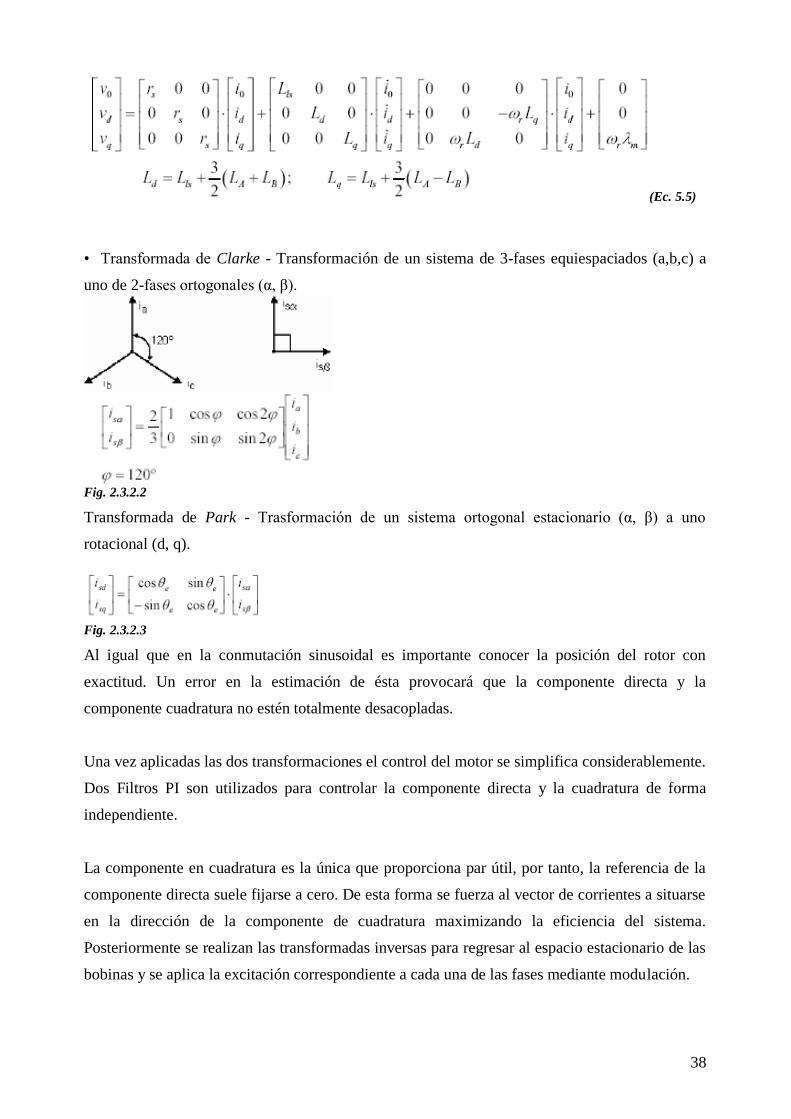
38
(Ec. 5.5)
• Transformada de Clarke - Transformación de un sistema de 3-fases equiespaciados (a,b,c) a
uno de 2-fases ortogonales (α, β).
Fig. 2.3.2.2
Transformada de Park - Trasformación de un sistema ortogonal estacionario (α, β) a uno
rotacional (d, q).
Fig. 2.3.2.3
Al igual que en la conmutación sinusoidal es importante conocer la posición del rotor con
exactitud. Un error en la estimación de ésta provocará que la componente directa y la
componente cuadratura no estén totalmente desacopladas.
Una vez aplicadas las dos transformaciones el control del motor se simplifica considerablemente.
Dos Filtros PI son utilizados para controlar la componente directa y la cuadratura de forma
independiente.
La componente en cuadratura es la única que proporciona par útil, por tanto, la referencia de la
componente directa suele fijarse a cero. De esta forma se fuerza al vector de corrientes a situarse
en la dirección de la componente de cuadratura maximizando la eficiencia del sistema.
Posteriormente se realizan las transformadas inversas para regresar al espacio estacionario de las
bobinas y se aplica la excitación correspondiente a cada una de las fases mediante modulación.
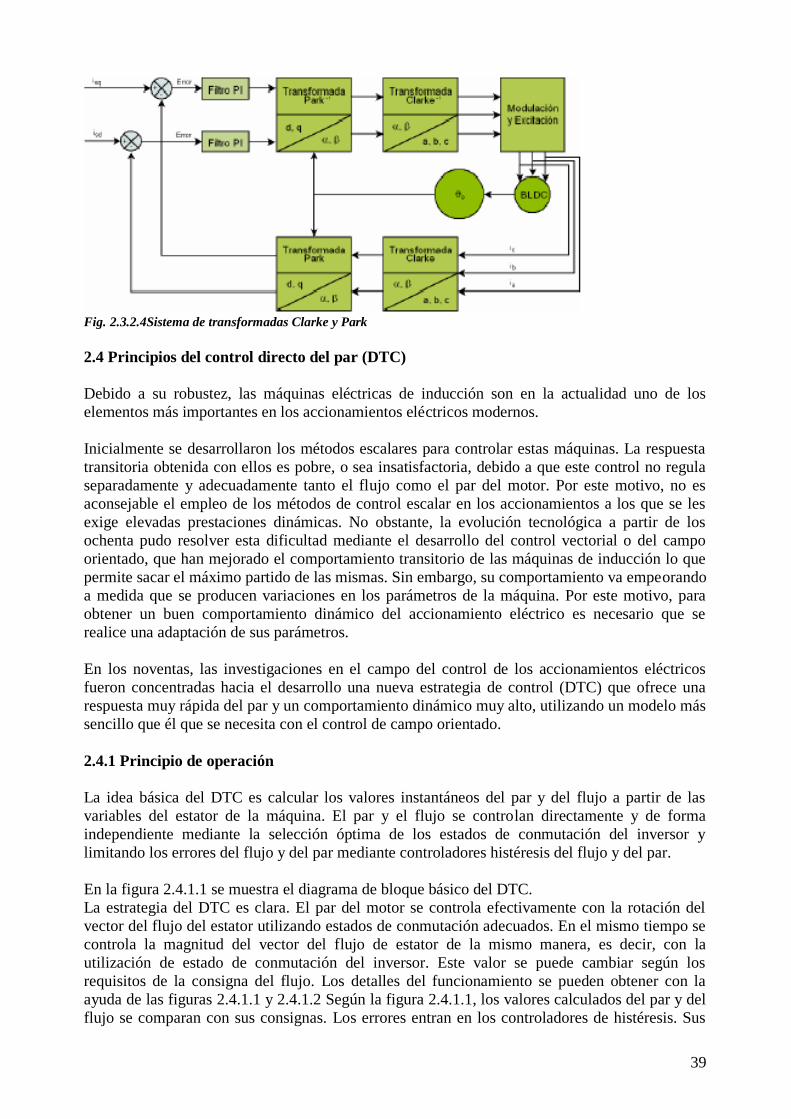
39
Fig. 2.3.2.4Sistema de transformadas Clarke y Park
2.4 Principios del control directo del par (DTC)
Debido a su robustez, las máquinas eléctricas de inducción son en la actualidad uno de los
elementos más importantes en los accionamientos eléctricos modernos.
Inicialmente se desarrollaron los métodos escalares para controlar estas máquinas. La respuesta
transitoria obtenida con ellos es pobre, o sea insatisfactoria, debido a que este control no regula
separadamente y adecuadamente tanto el flujo como el par del motor. Por este motivo, no es
aconsejable el empleo de los métodos de control escalar en los accionamientos a los que se les
exige elevadas prestaciones dinámicas. No obstante, la evolución tecnológica a partir de los
ochenta pudo resolver esta dificultad mediante el desarrollo del control vectorial o del campo
orientado, que han mejorado el comportamiento transitorio de las máquinas de inducción lo que
permite sacar el máximo partido de las mismas. Sin embargo, su comportamiento va empeorando
a medida que se producen variaciones en los parámetros de la máquina. Por este motivo, para
obtener un buen comportamiento dinámico del accionamiento eléctrico es necesario que se
realice una adaptación de sus parámetros.
En los noventas, las investigaciones en el campo del control de los accionamientos eléctricos
fueron concentradas hacia el desarrollo una nueva estrategia de control (DTC) que ofrece una
respuesta muy rápida del par y un comportamiento dinámico muy alto, utilizando un modelo más
sencillo que él que se necesita con el control de campo orientado.
2.4.1 Principio de operación
La idea básica del DTC es calcular los valores instantáneos del par y del flujo a partir de las
variables del estator de la máquina. El par y el flujo se controlan directamente y de forma
independiente mediante la selección óptima de los estados de conmutación del inversor y
limitando los errores del flujo y del par mediante controladores histéresis del flujo y del par.
En la figura 2.4.1.1 se muestra el diagrama de bloque básico del DTC.
La estrategia del DTC es clara. El par del motor se controla efectivamente con la rotación del
vector del flujo del estator utilizando estados de conmutación adecuados. En el mismo tiempo se
controla la magnitud del vector del flujo de estator de la mismo manera, es decir, con la
utilización de estado de conmutación del inversor. Este valor se puede cambiar según los
requisitos de la consigna del flujo. Los detalles del funcionamiento se pueden obtener con la
ayuda de las figuras 2.4.1.1 y 2.4.1.2 Según la figura 2.4.1.1, los valores calculados del par y del
flujo se comparan con sus consignas. Los errores entran en los controladores de histéresis. Sus
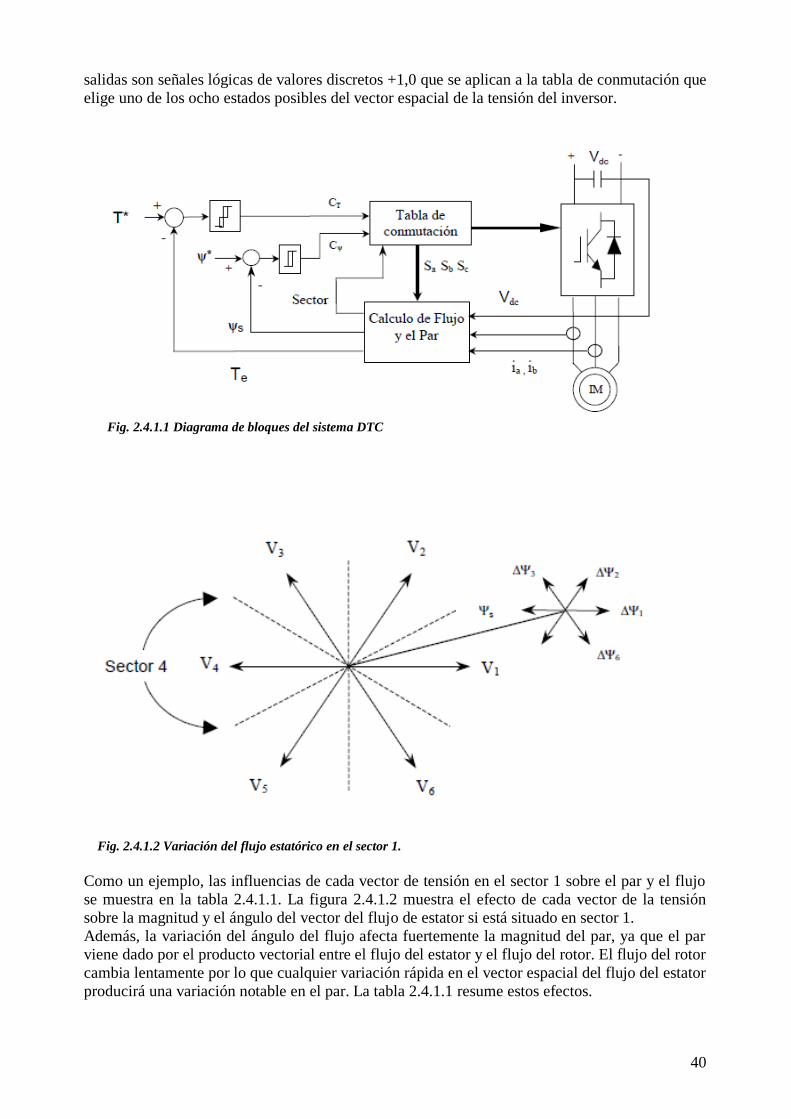
40
salidas son señales lógicas de valores discretos +1,0 que se aplican a la tabla de conmutación que
elige uno de los ocho estados posibles del vector espacial de la tensión del inversor.
Fig. 2.4.1.1 Diagrama de bloques del sistema DTC
Fig. 2.4.1.2 Variación del flujo estatórico en el sector 1.
Como un ejemplo, las influencias de cada vector de tensión en el sector 1 sobre el par y el flujo
se muestra en la tabla 2.4.1.1. La figura 2.4.1.2 muestra el efecto de cada vector de la tensión
sobre la magnitud y el ángulo del vector del flujo de estator si está situado en sector 1.
Además, la variación del ángulo del flujo afecta fuertemente la magnitud del par, ya que el par
viene dado por el producto vectorial entre el flujo del estator y el flujo del rotor. El flujo del rotor
cambia lentamente por lo que cualquier variación rápida en el vector espacial del flujo del estator
producirá una variación notable en el par. La tabla 2.4.1.1 resume estos efectos.
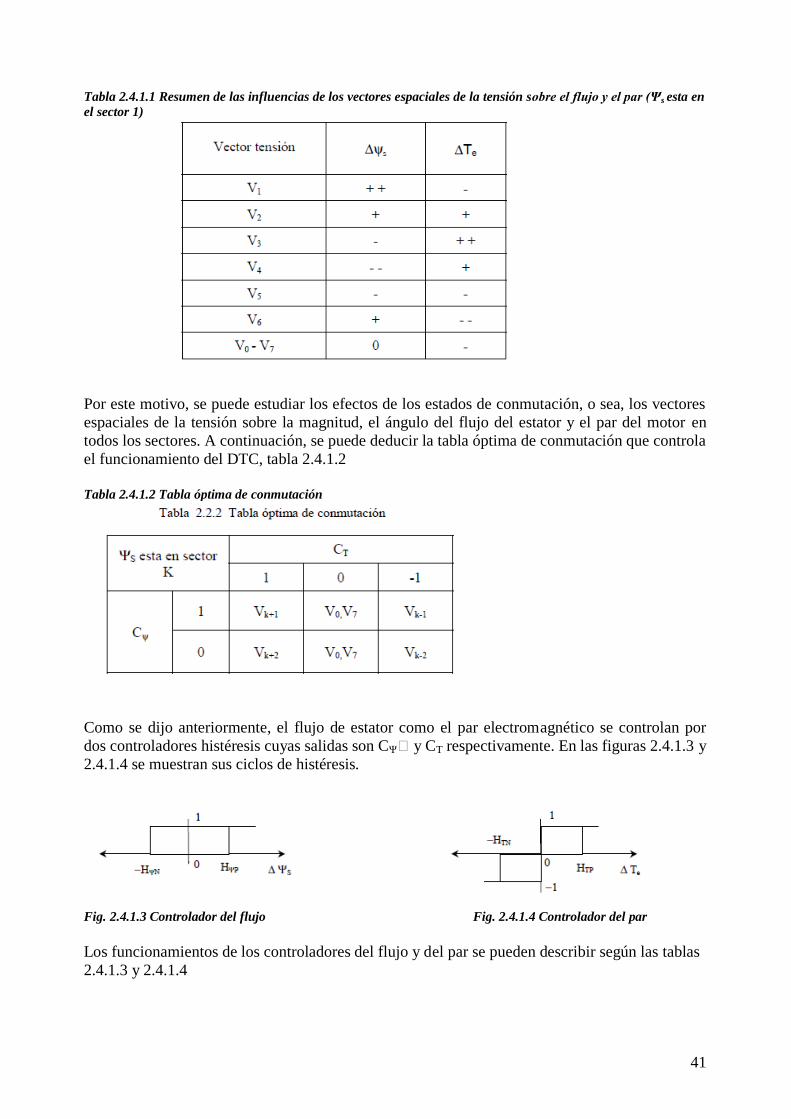
41
Tabla 2.4.1.1 Resumen de las influencias de los vectores espaciales de la tensión sobre el flujo y el par (Ψs esta en
el sector 1)
Por este motivo, se puede estudiar los efectos de los estados de conmutación, o sea, los vectores
espaciales de la tensión sobre la magnitud, el ángulo del flujo del estator y el par del motor en
todos los sectores. A continuación, se puede deducir la tabla óptima de conmutación que controla
el funcionamiento del DTC, tabla 2.4.1.2
Tabla 2.4.1.2 Tabla óptima de conmutación
Como se dijo anteriormente, el flujo de estator como el par electromagnético se controlan por
dos controladores histéresis cuyas salidas son CΨ y CT respectivamente. En las figuras 2.4.1.3 y
2.4.1.4 se muestran sus ciclos de histéresis.
Fig. 2.4.1.3 Controlador del flujo Fig. 2.4.1.4 Controlador del par
Los funcionamientos de los controladores del flujo y del par se pueden describir según las tablas
2.4.1.3 y 2.4.1.4
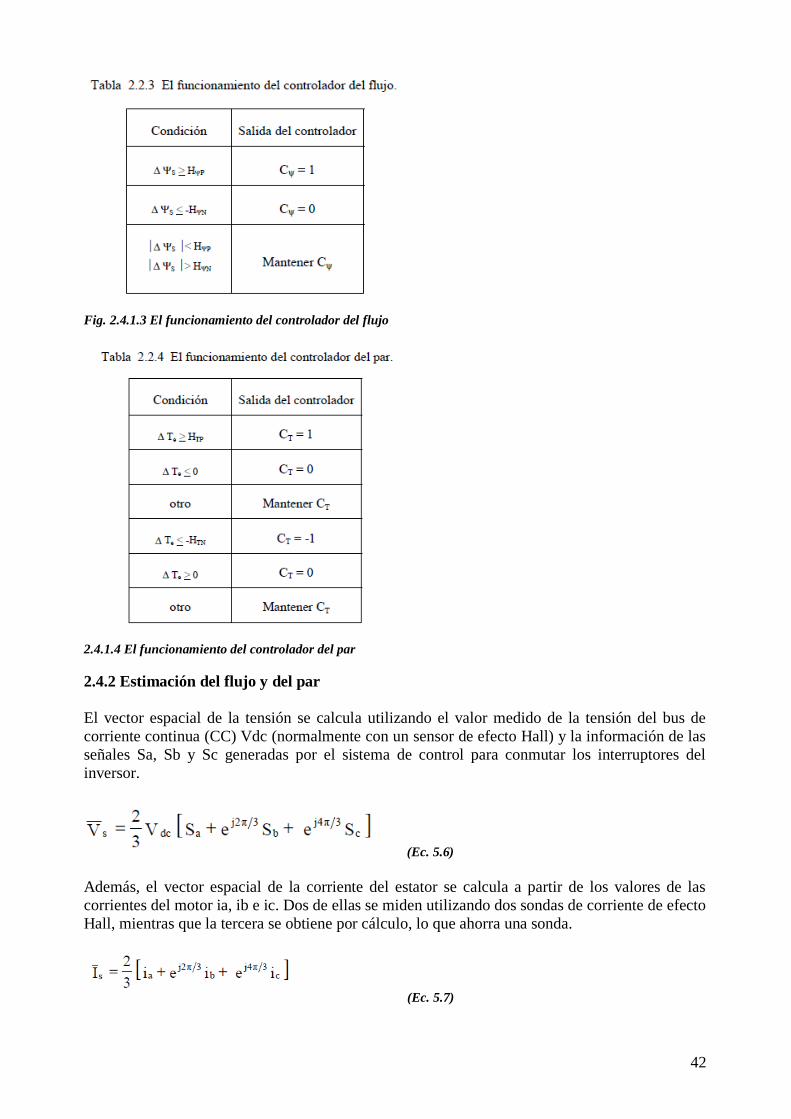
42
Fig. 2.4.1.3 El funcionamiento del controlador del flujo
2.4.1.4 El funcionamiento del controlador del par
2.4.2 Estimación del flujo y del par
El vector espacial de la tensión se calcula utilizando el valor medido de la tensión del bus de
corriente continua (CC) Vdc (normalmente con un sensor de efecto Hall) y la información de las
señales Sa, Sb y Sc generadas por el sistema de control para conmutar los interruptores del
inversor.
(Ec. 5.6)
Además, el vector espacial de la corriente del estator se calcula a partir de los valores de las
corrientes del motor ia, ib e ic. Dos de ellas se miden utilizando dos sondas de corriente de efecto
Hall, mientras que la tercera se obtiene por cálculo, lo que ahorra una sonda.
(Ec. 5.7)

43
El vector espacial del flujo se obtiene mediante la integración de la f.e.m del motor:
(Ec. 5.8)
El par electromagnético se calcula según la ecuación siguiente:
(Ec. 5.9)
El ángulo del vector del flujo del estator se calcula mediante la ecuación siguiente:
(Ec. 6.0)
Y según los signos de las componentes ψd y ψq se añade una constante para que el ángulo del
flujo se ajuste y esté situado entre los 0 y 360 grados. No obstante, existen otros métodos para
estimar el flujo del estator y mejorar el comportamiento del accionamiento a bajas velocidades,
ya que éste se ve afectado por efecto que produce la variación de la resistencia del estator del
motor con la temperatura.
Dado que el DTC esta implementado en forma digital hay que tener una formulación discreta
para ser empleada en los algoritmos escritos en los lenguajes ensamblador o C++.
(Ec. 6.1)
(Ec. 6.0)
(Ec. 6.2)
(Ec. 6.3)
Siendo:
TS = Tiempo de muestreo.
n = Número de muestra.
La elección del tiempo de muestreo depende de varios factores:
- La velocidad de la tarjeta de adquisición de datos.
- El tiempo de ejecución de los diversos algoritmos de cálculo.
A continuación, el par electromagnético se calcula utilizando la ecuación siguiente:
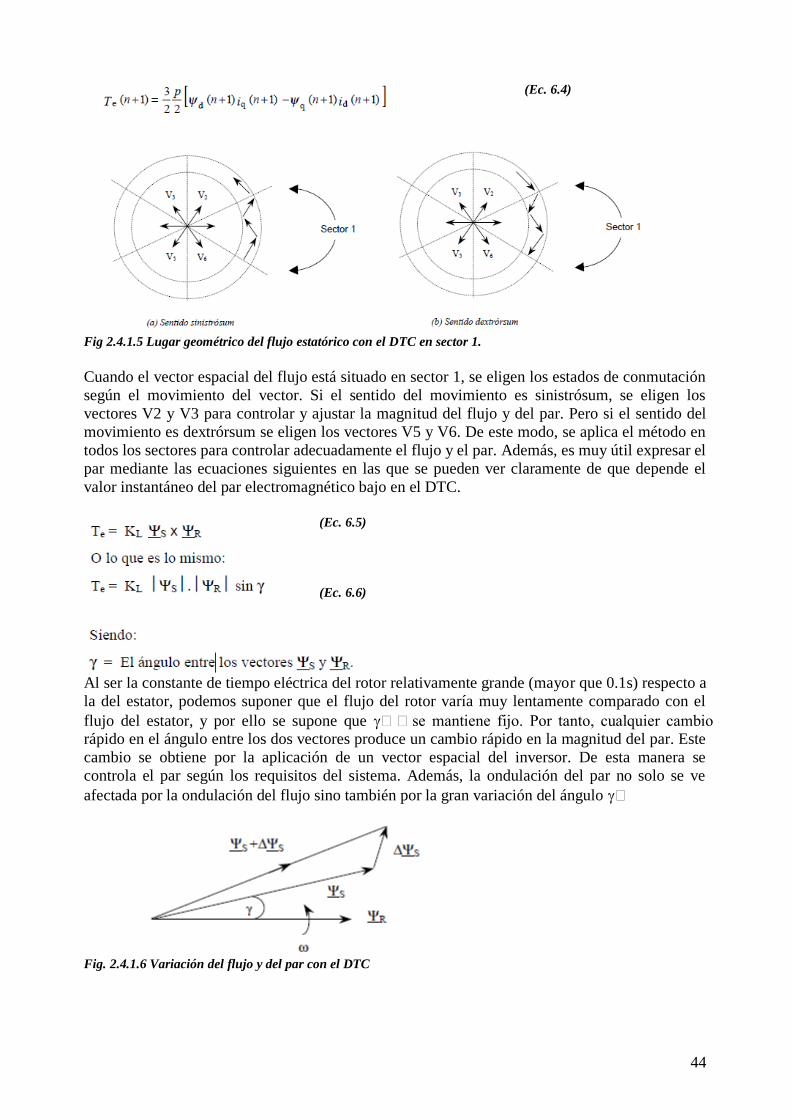
44
Fig 2.4.1.5 Lugar geométrico del flujo estatórico con el DTC en sector 1.
Cuando el vector espacial del flujo está situado en sector 1, se eligen los estados de conmutación
según el movimiento del vector. Si el sentido del movimiento es sinistrósum, se eligen los
vectores V2 y V3 para controlar y ajustar la magnitud del flujo y del par. Pero si el sentido del
movimiento es dextrórsum se eligen los vectores V5 y V6. De este modo, se aplica el método en
todos los sectores para controlar adecuadamente el flujo y el par. Además, es muy útil expresar el
par mediante las ecuaciones siguientes en las que se pueden ver claramente de que depende el
valor instantáneo del par electromagnético bajo en el DTC.
(Ec. 6.5)
(Ec. 6.6)
Al ser la constante de tiempo eléctrica del rotor relativamente grande (mayor que 0.1s) respecto a
la del estator, podemos suponer que el flujo del rotor varía muy lentamente comparado con el
flujo del estator, y por ello se supone que se mantiene fijo. Por tanto, cualquier cambio rápido en el ángulo entre los dos vectores produce un cambio rápido en la magnitud del par. Este
cambio se obtiene por la aplicación de un vector espacial del inversor. De esta manera se
controla el par según los requisitos del sistema. Además, la ondulación del par no solo se ve
afectada por la ondulación del flujo sino también por la gran variación del ángulo
Fig. 2.4.1.6 Variación del flujo y del par con el DTC
(Ec. 6.4)
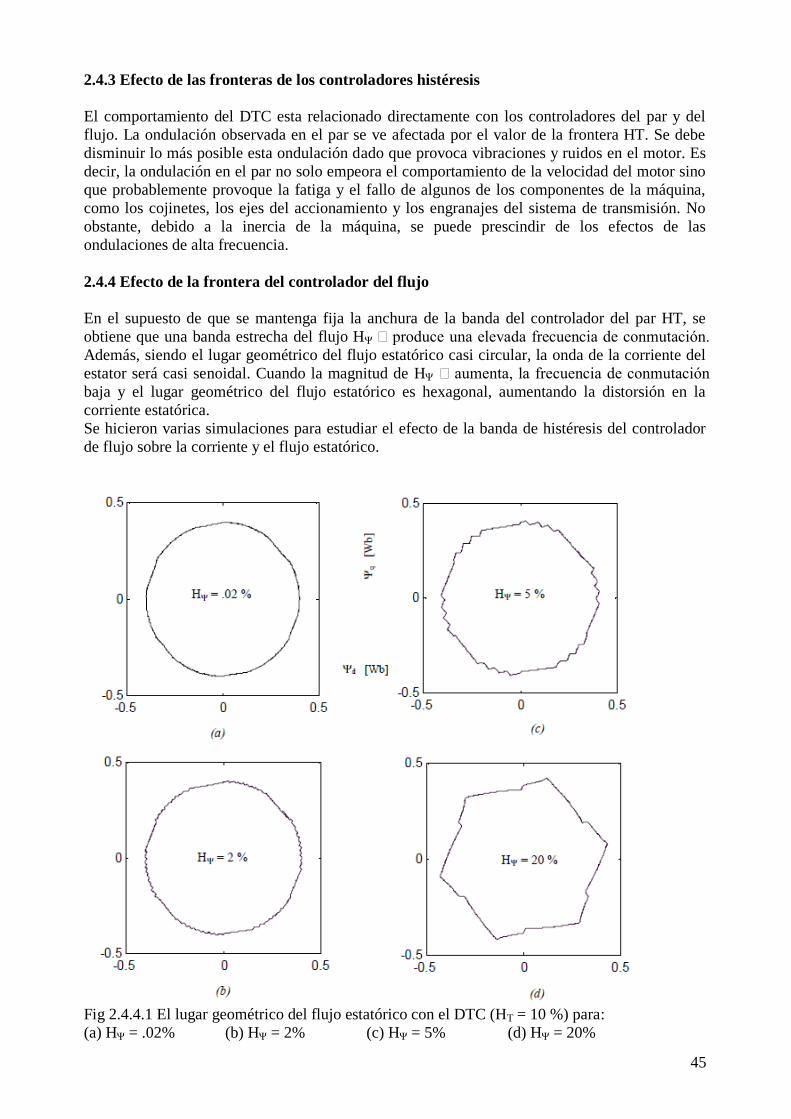
45
2.4.3 Efecto de las fronteras de los controladores histéresis
El comportamiento del DTC esta relacionado directamente con los controladores del par y del
flujo. La ondulación observada en el par se ve afectada por el valor de la frontera HT. Se debe
disminuir lo más posible esta ondulación dado que provoca vibraciones y ruidos en el motor. Es
decir, la ondulación en el par no solo empeora el comportamiento de la velocidad del motor sino
que probablemente provoque la fatiga y el fallo de algunos de los componentes de la máquina,
como los cojinetes, los ejes del accionamiento y los engranajes del sistema de transmisión. No
obstante, debido a la inercia de la máquina, se puede prescindir de los efectos de las
ondulaciones de alta frecuencia.
2.4.4 Efecto de la frontera del controlador del flujo
En el supuesto de que se mantenga fija la anchura de la banda del controlador del par HT, se
obtiene que una banda estrecha del flujo HΨ produce una elevada frecuencia de conmutación.
Además, siendo el lugar geométrico del flujo estatórico casi circular, la onda de la corriente del
estator será casi senoidal. Cuando la magnitud de HΨ aumenta, la frecuencia de conmutación
baja y el lugar geométrico del flujo estatórico es hexagonal, aumentando la distorsión en la
corriente estatórica.
Se hicieron varias simulaciones para estudiar el efecto de la banda de histéresis del controlador
de flujo sobre la corriente y el flujo estatórico.
Fig 2.4.4.1 El lugar geométrico del flujo estatórico con el DTC (HT = 10 %) para:
(a) HΨ = .02% (b) HΨ = 2% (c) HΨ = 5% (d) HΨ = 20%

46
La figura 2.4.4.1 muestra el lugar geométrico del flujo estatórico con el DTC. En las
simulaciones se ha fijado la frontera del controlador del par en el 10 % de la señal de referencia.
Se observa que cuando el HΨ aumenta, el lugar geométrico deja de ser circular y se aproxima a
una curva hexagonal. Esto se refleja claramente en la corriente del motor tal como se muestra en
la figura 2.4.4.2. De los registros de una fase del estator en cada uno de los casos anteriores se
puede observar que la ondulación de la corriente del estator disminuye significativamente cuando
se reduce la banda HΨ Y por consiguiente, el valor de la distorsión armónica (THD) de la
corriente también disminuye, tal como se mostrará posteriormente, mejorando la calidad de onda
de la corriente.
Fig. 2.4.4.2 Corriente estatórica con el DTC (HT = 10 %) para:
(a) HΨ = .02% (b) HΨ = 2% (c) HΨ = 5% (d) HΨ = 20%
2.4.5 Efecto de la frontera del controlador del par
La banda del controlador del par HT afecta la tasa de distorsión armónica (THD) y también la
frecuencia de conmutación. En realidad, la frecuencia de conmutación depende de las bandas de
los controladores de histéresis del par y del flujo. En la figura 2.4.5.1 se muestra la variación de
la frecuencia de conmutación media con la variación de las bandas de histéresis.
En ella, se aprecia que la HT tiene una mayor influencia sobre la frecuencia de conmutación.
Dado que la frecuencia de conmutación no es fija, se define la frecuencia de conmutación media
como:
Fsw = Ns / Tf .
Siendo:
Ns = Número de conmutaciones en un periodo completo.
Tf = Periodo de la onda fundamental.
La figura 2.4.5.2 muestra la variación del factor THD para varios valores de HT. Los resultados
obtenidos pueden variar con los parámetros del motor y las condiciones de operación. Sin
embargo los resultados muestran las consecuencias generalmente.
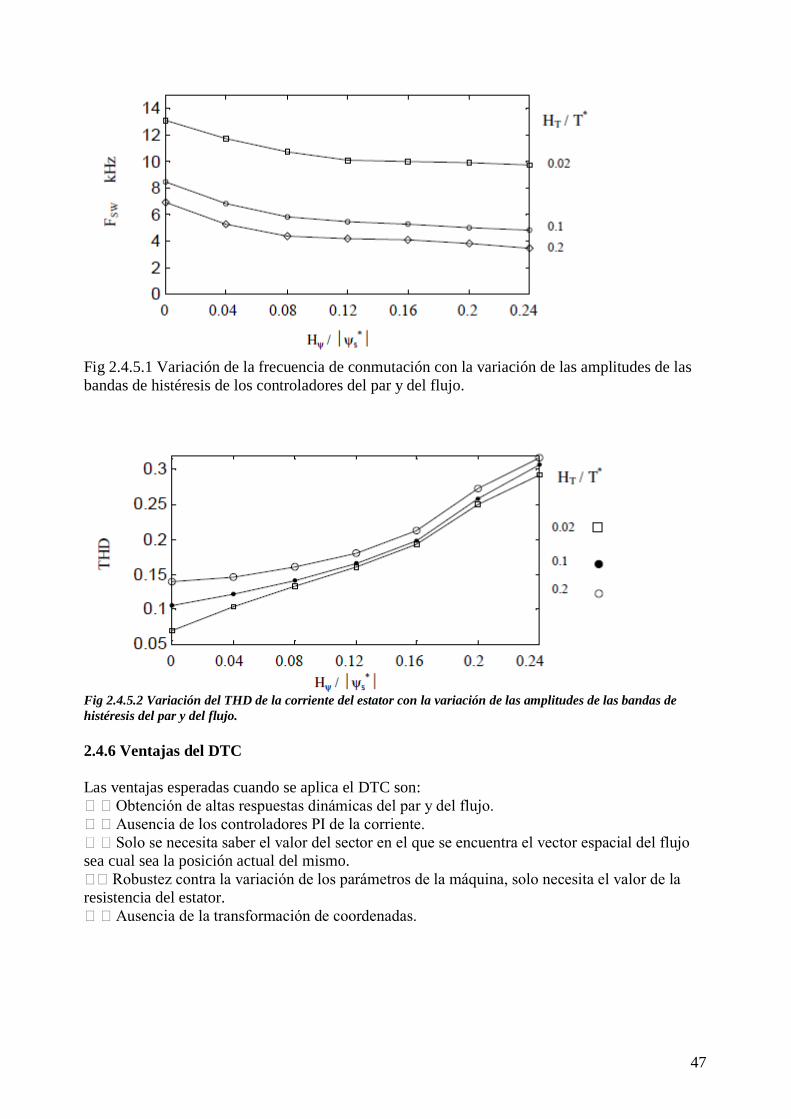
47
Fig 2.4.5.1 Variación de la frecuencia de conmutación con la variación de las amplitudes de las
bandas de histéresis de los controladores del par y del flujo.
Fig 2.4.5.2 Variación del THD de la corriente del estator con la variación de las amplitudes de las bandas de
histéresis del par y del flujo.
2.4.6 Ventajas del DTC
Las ventajas esperadas cuando se aplica el DTC son:
Obtención de altas respuestas dinámicas del par y del flujo.
Ausencia de los controladores PI de la corriente.
Solo se necesita saber el valor del sector en el que se encuentra el vector espacial del flujo
sea cual sea la posición actual del mismo.
Robustez contra la variación de los parámetros de la máquina, solo necesita el valor de la
resistencia del estator.
Ausencia de la transformación de coordenadas.
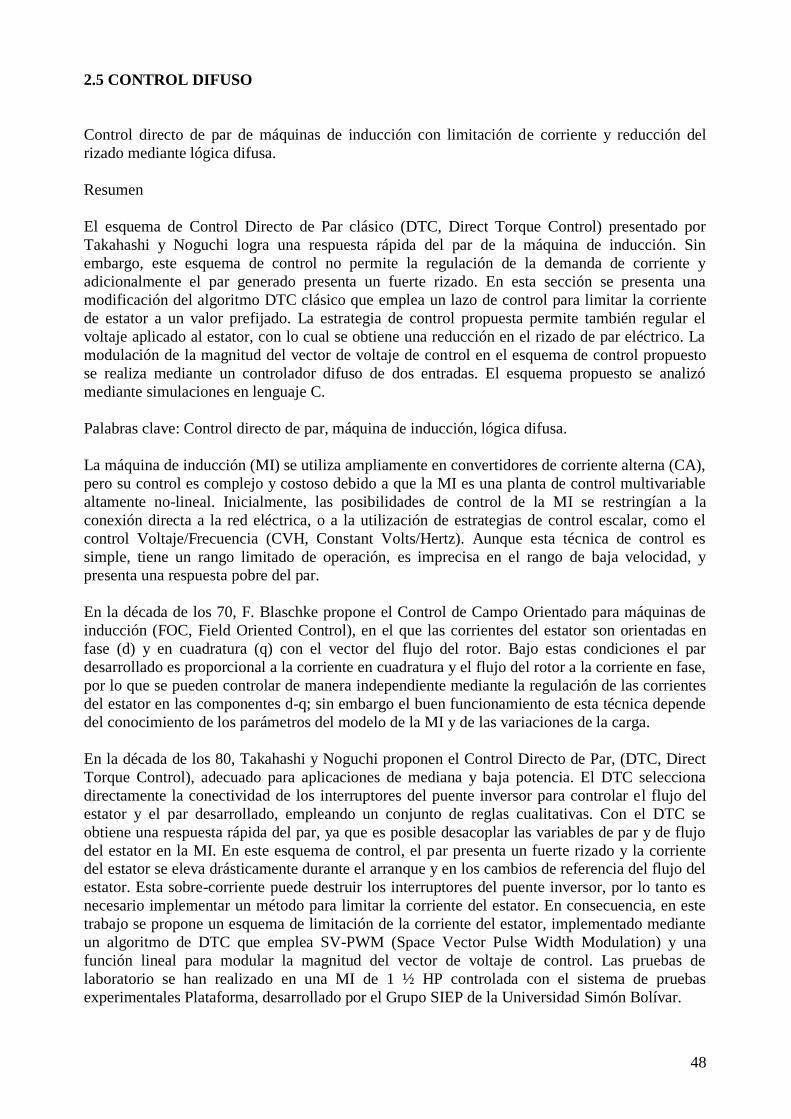
48
2.5 CONTROL DIFUSO
Control directo de par de máquinas de inducción con limitación de corriente y reducción del
rizado mediante lógica difusa.
Resumen
El esquema de Control Directo de Par clásico (DTC, Direct Torque Control) presentado por
Takahashi y Noguchi logra una respuesta rápida del par de la máquina de inducción. Sin
embargo, este esquema de control no permite la regulación de la demanda de corriente y
adicionalmente el par generado presenta un fuerte rizado. En esta sección se presenta una
modificación del algoritmo DTC clásico que emplea un lazo de control para limitar la corriente
de estator a un valor prefijado. La estrategia de control propuesta permite también regular el
voltaje aplicado al estator, con lo cual se obtiene una reducción en el rizado de par eléctrico. La
modulación de la magnitud del vector de voltaje de control en el esquema de control propuesto
se realiza mediante un controlador difuso de dos entradas. El esquema propuesto se analizó
mediante simulaciones en lenguaje C.
Palabras clave: Control directo de par, máquina de inducción, lógica difusa.
La máquina de inducción (MI) se utiliza ampliamente en convertidores de corriente alterna (CA),
pero su control es complejo y costoso debido a que la MI es una planta de control multivariable
altamente no-lineal. Inicialmente, las posibilidades de control de la MI se restringían a la
conexión directa a la red eléctrica, o a la utilización de estrategias de control escalar, como el
control Voltaje/Frecuencia (CVH, Constant Volts/Hertz). Aunque esta técnica de control es
simple, tiene un rango limitado de operación, es imprecisa en el rango de baja velocidad, y
presenta una respuesta pobre del par.
En la década de los 70, F. Blaschke propone el Control de Campo Orientado para máquinas de
inducción (FOC, Field Oriented Control), en el que las corrientes del estator son orientadas en
fase (d) y en cuadratura (q) con el vector del flujo del rotor. Bajo estas condiciones el par
desarrollado es proporcional a la corriente en cuadratura y el flujo del rotor a la corriente en fase,
por lo que se pueden controlar de manera independiente mediante la regulación de las corrientes
del estator en las componentes d-q; sin embargo el buen funcionamiento de esta técnica depende
del conocimiento de los parámetros del modelo de la MI y de las variaciones de la carga.
En la década de los 80, Takahashi y Noguchi proponen el Control Directo de Par, (DTC, Direct
Torque Control), adecuado para aplicaciones de mediana y baja potencia. El DTC selecciona
directamente la conectividad de los interruptores del puente inversor para controlar el flujo del
estator y el par desarrollado, empleando un conjunto de reglas cualitativas. Con el DTC se
obtiene una respuesta rápida del par, ya que es posible desacoplar las variables de par y de flujo
del estator en la MI. En este esquema de control, el par presenta un fuerte rizado y la corriente del estator se eleva drásticamente durante el arranque y en los cambios de referencia del flujo del
estator. Esta sobre-corriente puede destruir los interruptores del puente inversor, por lo tanto es
necesario implementar un método para limitar la corriente del estator. En consecuencia, en este
trabajo se propone un esquema de limitación de la corriente del estator, implementado mediante
un algoritmo de DTC que emplea SV-PWM (Space Vector Pulse Width Modulation) y una
función lineal para modular la magnitud del vector de voltaje de control. Las pruebas de
laboratorio se han realizado en una MI de 1 ½ HP controlada con el sistema de pruebas
experimentales Plataforma, desarrollado por el Grupo SIEP de la Universidad Simón Bolívar.

49
2.5.1 Modelo de la Máquina de Inducción
El modelo equivalente de la máquina de inducción que permite calcular las cantidades básicas,
cuando el motor opera en el estado estacionario o en el estado transitorio, está basado en los
conceptos de cantidades vectoriales introducidos por Kovacs. La forma compacta de las
ecuaciones que modelan la máquina de inducción en un marco de referencia estacionario
orientado al estator es la presentada en las ecuaciones siguientes:
(Ec. 6.7)
(Ec. 6.8)
(Ec. 6.9)
donde
Vs (t), Vr (t): Tensión de estator y de rotor.
is (t), ir (t): Corriente de estator y de rotor.
Rs, Rr: Resistencia de estator y de rotor.
Lm, Ls, Lr: Inductancia de magnetización, de estator y de rotor.
Y r (t): Flujo de rotor.
P: Número de pares de polos.
Te, TL: Par eléctrico y par de carga.
JL: Inercia del sistema mecánico más inercia del rotor.
w m : Velocidad mecánica del motor.
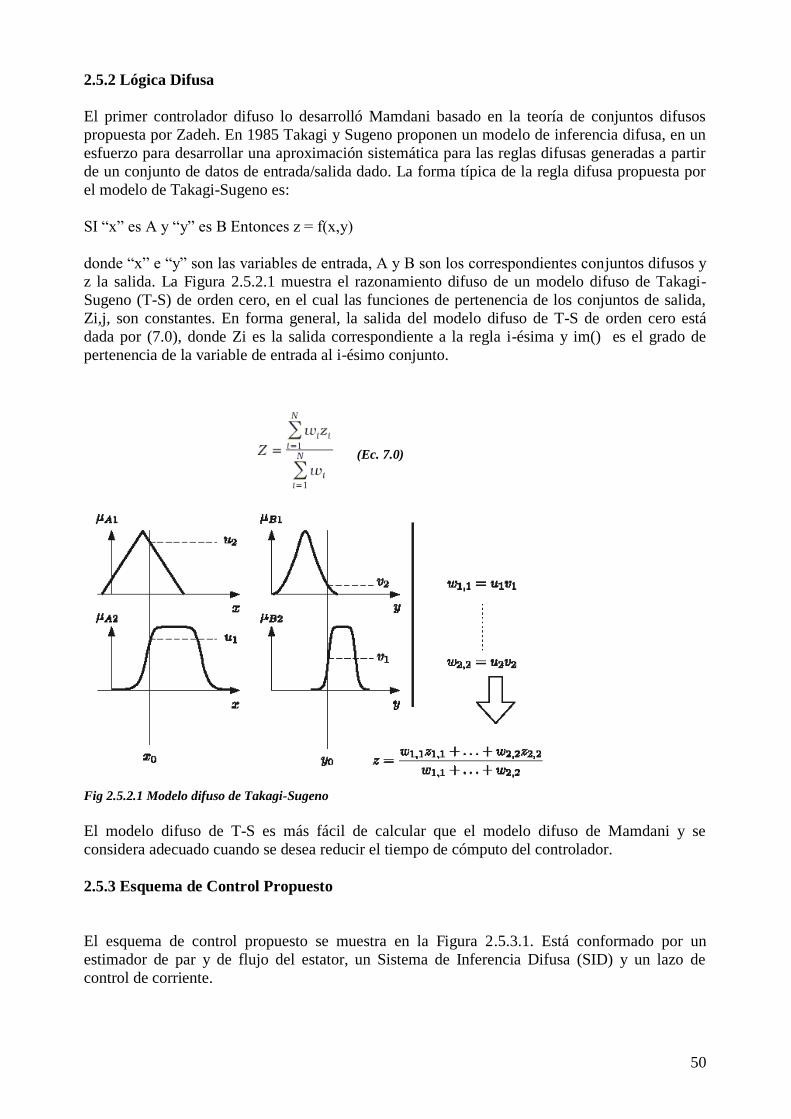
50
2.5.2 Lógica Difusa
El primer controlador difuso lo desarrolló Mamdani basado en la teoría de conjuntos difusos
propuesta por Zadeh. En 1985 Takagi y Sugeno proponen un modelo de inferencia difusa, en un
esfuerzo para desarrollar una aproximación sistemática para las reglas difusas generadas a partir
de un conjunto de datos de entrada/salida dado. La forma típica de la regla difusa propuesta por
el modelo de Takagi-Sugeno es:
SI “x” es A y “y” es B Entonces z = f(x,y)
donde “x” e “y” son las variables de entrada, A y B son los correspondientes conjuntos difusos y
z la salida. La Figura 2.5.2.1 muestra el razonamiento difuso de un modelo difuso de Takagi-
Sugeno (T-S) de orden cero, en el cual las funciones de pertenencia de los conjuntos de salida,
Zi,j, son constantes. En forma general, la salida del modelo difuso de T-S de orden cero está
dada por (7.0), donde Zi es la salida correspondiente a la regla i-ésima y im() es el grado de
pertenencia de la variable de entrada al i-ésimo conjunto.
Fig 2.5.2.1 Modelo difuso de Takagi-Sugeno
El modelo difuso de T-S es más fácil de calcular que el modelo difuso de Mamdani y se
considera adecuado cuando se desea reducir el tiempo de cómputo del controlador.
2.5.3 Esquema de Control Propuesto
El esquema de control propuesto se muestra en la Figura 2.5.3.1. Está conformado por un
estimador de par y de flujo del estator, un Sistema de Inferencia Difusa (SID) y un lazo de
control de corriente.
(Ec. 7.0)
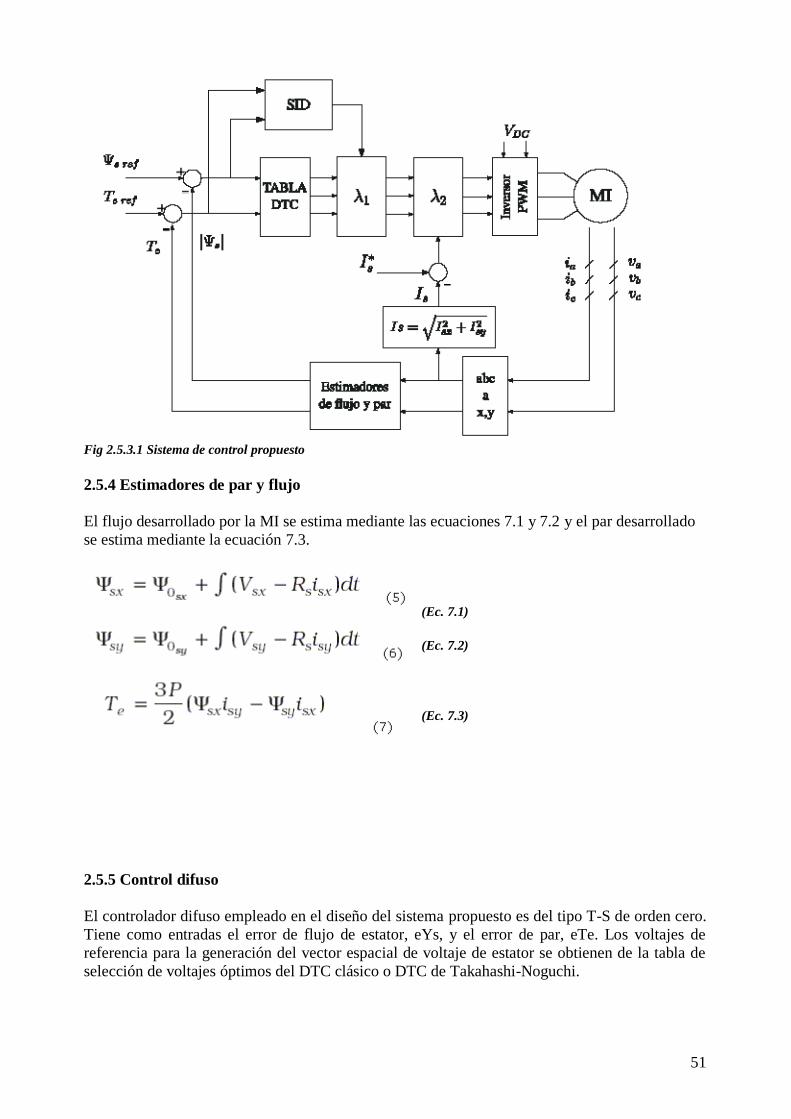
51
Fig 2.5.3.1 Sistema de control propuesto
2.5.4 Estimadores de par y flujo
El flujo desarrollado por la MI se estima mediante las ecuaciones 7.1 y 7.2 y el par desarrollado
se estima mediante la ecuación 7.3.
(Ec. 7.1) (Ec. 7.2)
(Ec. 7.3)
2.5.5 Control difuso
El controlador difuso empleado en el diseño del sistema propuesto es del tipo T-S de orden cero.
Tiene como entradas el error de flujo de estator, eYs, y el error de par, eTe. Los voltajes de
referencia para la generación del vector espacial de voltaje de estator se obtienen de la tabla de
selección de voltajes óptimos del DTC clásico o DTC de Takahashi-Noguchi.
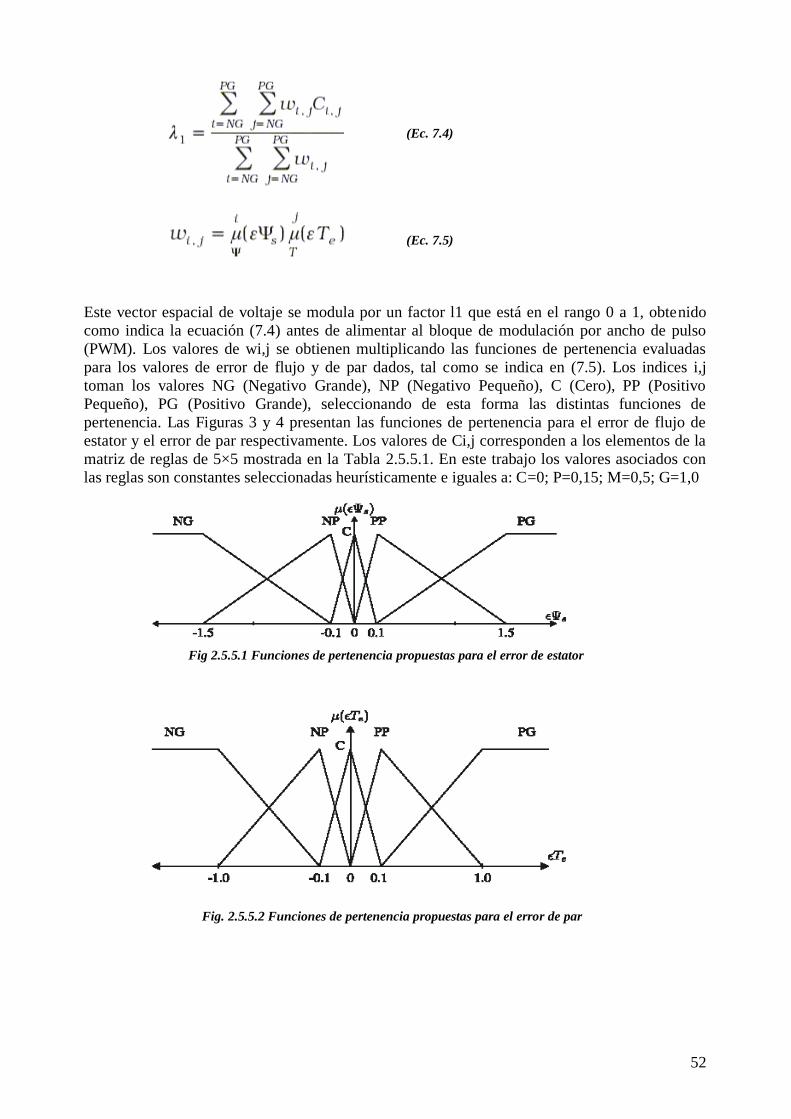
52
(Ec. 7.4)
(Ec. 7.5)
Este vector espacial de voltaje se modula por un factor l1 que está en el rango 0 a 1, obtenido
como indica la ecuación (7.4) antes de alimentar al bloque de modulación por ancho de pulso
(PWM). Los valores de wi,j se obtienen multiplicando las funciones de pertenencia evaluadas
para los valores de error de flujo y de par dados, tal como se indica en (7.5). Los indices i,j
toman los valores NG (Negativo Grande), NP (Negativo Pequeño), C (Cero), PP (Positivo
Pequeño), PG (Positivo Grande), seleccionando de esta forma las distintas funciones de
pertenencia. Las Figuras 3 y 4 presentan las funciones de pertenencia para el error de flujo de
estator y el error de par respectivamente. Los valores de Ci,j corresponden a los elementos de la
matriz de reglas de 5×5 mostrada en la Tabla 2.5.5.1. En este trabajo los valores asociados con
las reglas son constantes seleccionadas heurísticamente e iguales a: C=0; P=0,15; M=0,5; G=1,0
Fig. 2.5.5.2 Funciones de pertenencia propuestas para el error de par
Fig 2.5.5.1 Funciones de pertenencia propuestas para el error de estator
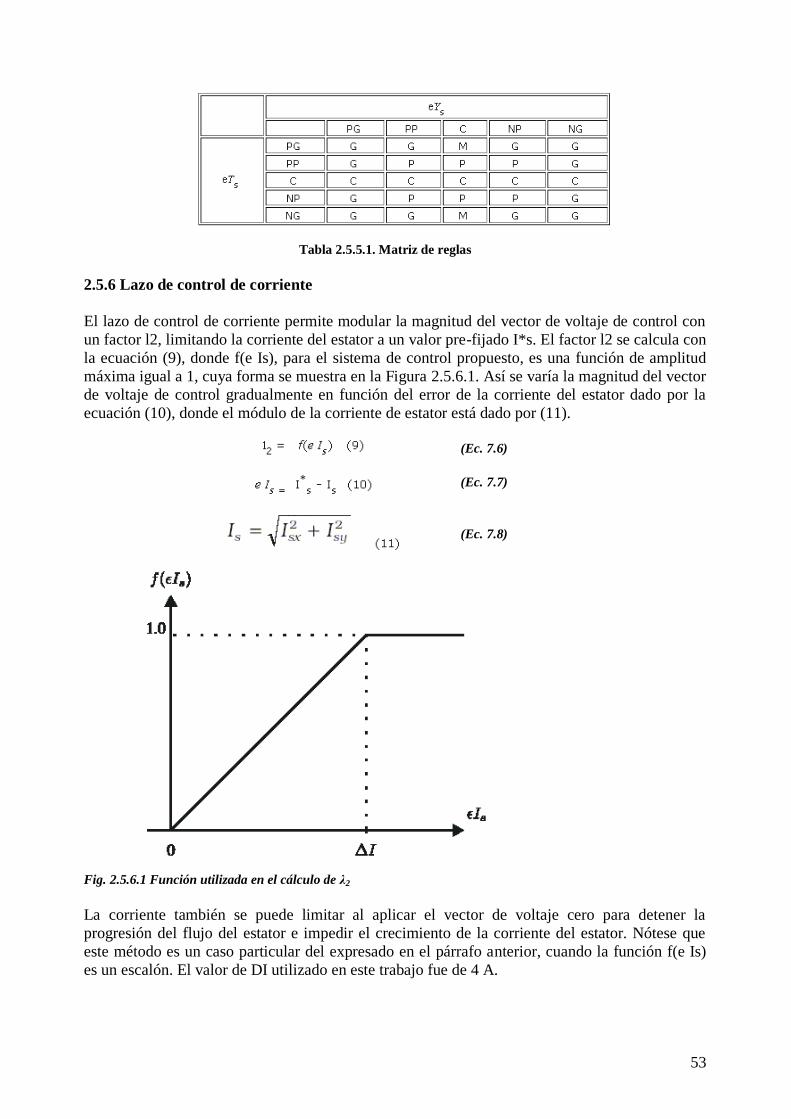
53
Tabla 2.5.5.1. Matriz de reglas
2.5.6 Lazo de control de corriente
El lazo de control de corriente permite modular la magnitud del vector de voltaje de control con
un factor l2, limitando la corriente del estator a un valor pre-fijado I*s. El factor l2 se calcula con
la ecuación (9), donde f(e Is), para el sistema de control propuesto, es una función de amplitud
máxima igual a 1, cuya forma se muestra en la Figura 2.5.6.1. Así se varía la magnitud del vector
de voltaje de control gradualmente en función del error de la corriente del estator dado por la
ecuación (10), donde el módulo de la corriente de estator está dado por (11).
(Ec. 7.6)
(Ec. 7.7)
(Ec. 7.8)
Fig. 2.5.6.1 Función utilizada en el cálculo de λ2
La corriente también se puede limitar al aplicar el vector de voltaje cero para detener la
progresión del flujo del estator e impedir el crecimiento de la corriente del estator. Nótese que
este método es un caso particular del expresado en el párrafo anterior, cuando la función f(e Is)
es un escalón. El valor de DI utilizado en este trabajo fue de 4 A.

54
2.5.7 Resultados de las Simulaciones
A continuación se presentan los resultados de la simulación del esquema de control mostrado en
la Figura 2. Los parámetros de la MI empleados tanto en las simulaciones como durante la
pruebas experimentales se presentan en la Tabla 2.5.7.1 y los datos de placa se presentan en la
Tabla 2.5.7.2.
En la Figura 2.5.7.2 se muestra las respuestas del par y flujo del estator en la MI con el DTC de
Takahashi-Noguchi. El par crece rápidamente y el flujo del estator se mantiene en una
trayectoria circular. Sin embargo, como se muestra en la Figura 2.5.7.3, en el arranque la corriente
se eleva aproximadamente a siete veces el valor de la corriente en estado estacionario.
Fig. 2.5.7.1 Simulación del esquema de control
Tabla 2.5.7.1 Parámetros de la MI utilizados en las simulaciones y en las pruebas experimentales
Tabla 2.5.7.2 Datos de la placa de la MI
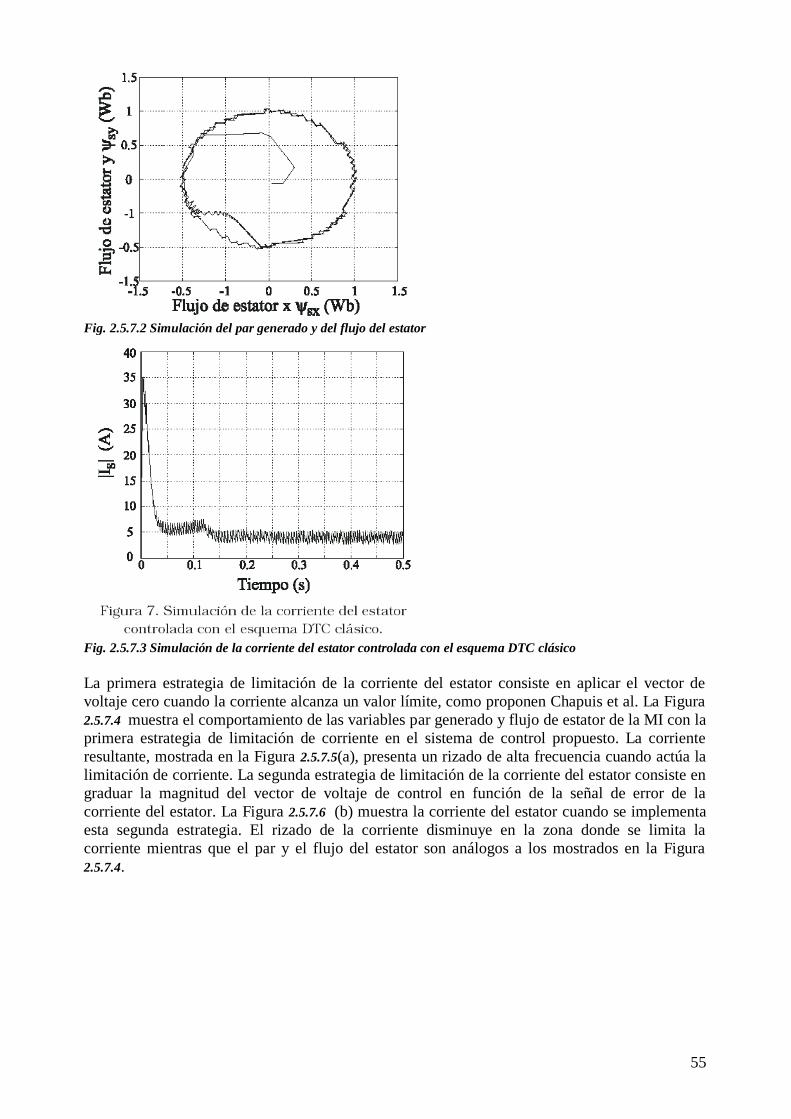
55
Fig. 2.5.7.2 Simulación del par generado y del flujo del estator
Fig. 2.5.7.3 Simulación de la corriente del estator controlada con el esquema DTC clásico
La primera estrategia de limitación de la corriente del estator consiste en aplicar el vector de
voltaje cero cuando la corriente alcanza un valor límite, como proponen Chapuis et al. La Figura
2.5.7.4 muestra el comportamiento de las variables par generado y flujo de estator de la MI con la
primera estrategia de limitación de corriente en el sistema de control propuesto. La corriente
resultante, mostrada en la Figura 2.5.7.5(a), presenta un rizado de alta frecuencia cuando actúa la
limitación de corriente. La segunda estrategia de limitación de la corriente del estator consiste en
graduar la magnitud del vector de voltaje de control en función de la señal de error de la
corriente del estator. La Figura 2.5.7.6 (b) muestra la corriente del estator cuando se implementa
esta segunda estrategia. El rizado de la corriente disminuye en la zona donde se limita la
corriente mientras que el par y el flujo del estator son análogos a los mostrados en la Figura
2.5.7.4.
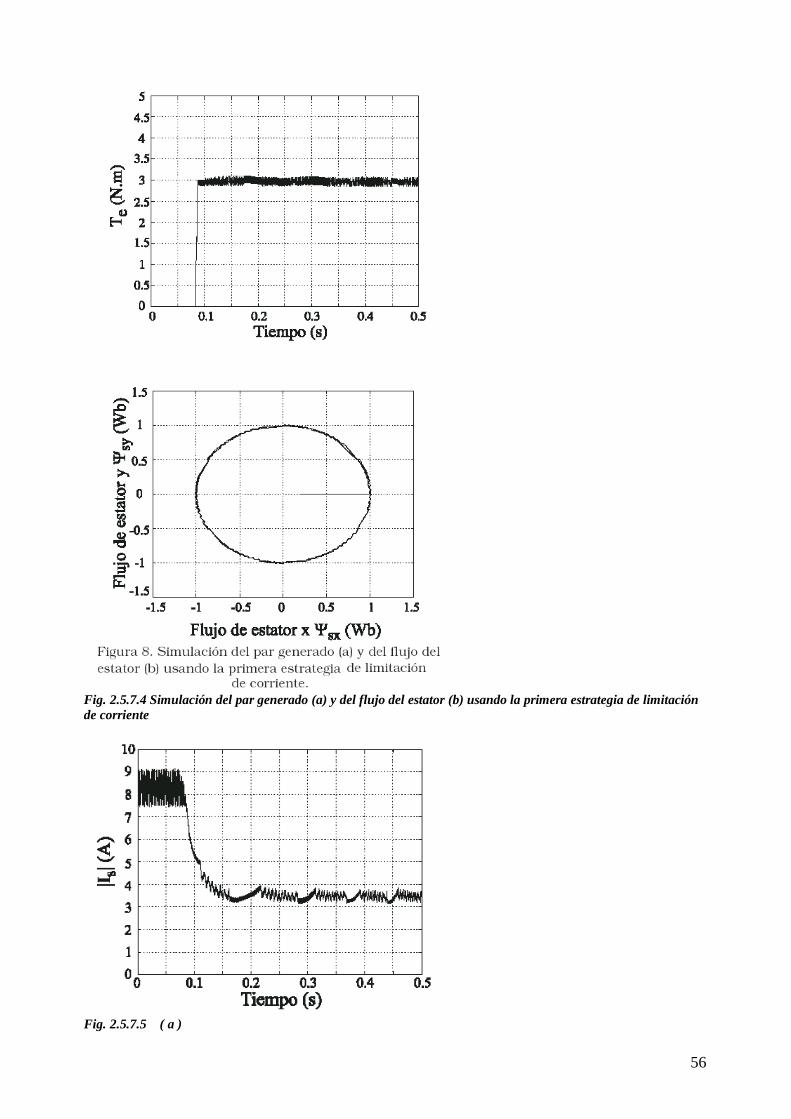
56
Fig. 2.5.7.4 Simulación del par generado (a) y del flujo del estator (b) usando la primera estrategia de limitación
de corriente
Fig. 2.5.7.5 ( a )
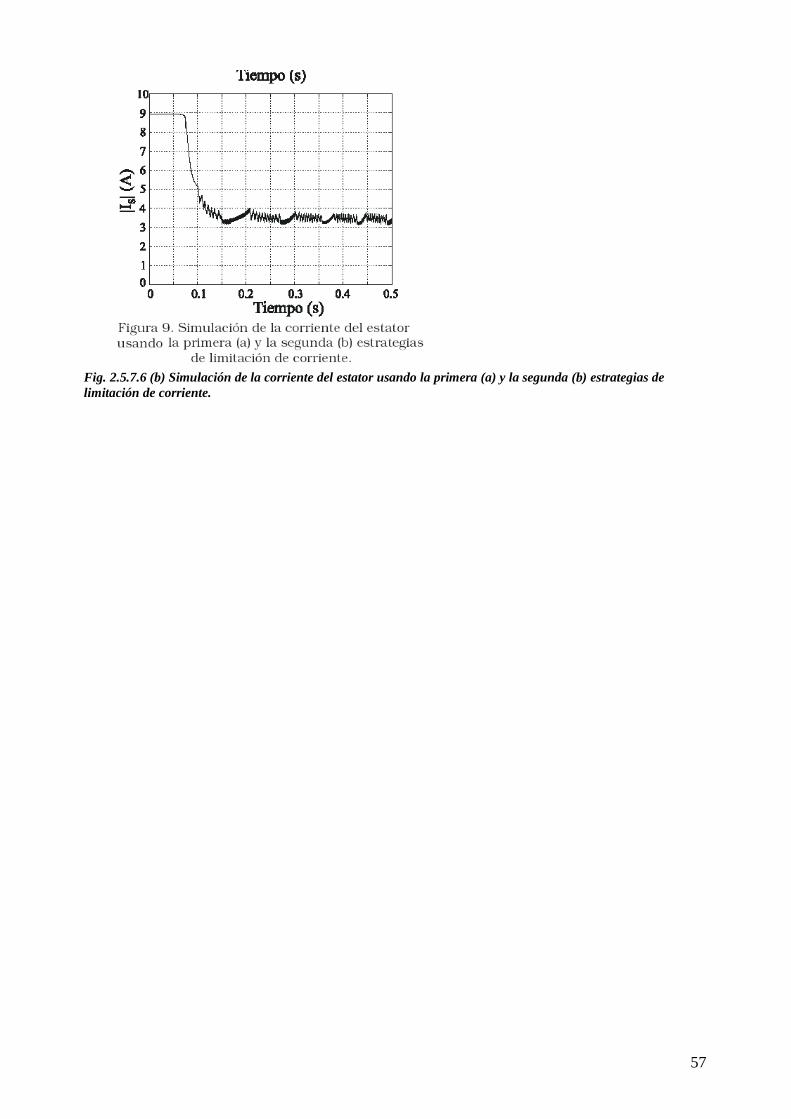
57
Fig. 2.5.7.6 (b) Simulación de la corriente del estator usando la primera (a) y la segunda (b) estrategias de
limitación de corriente.
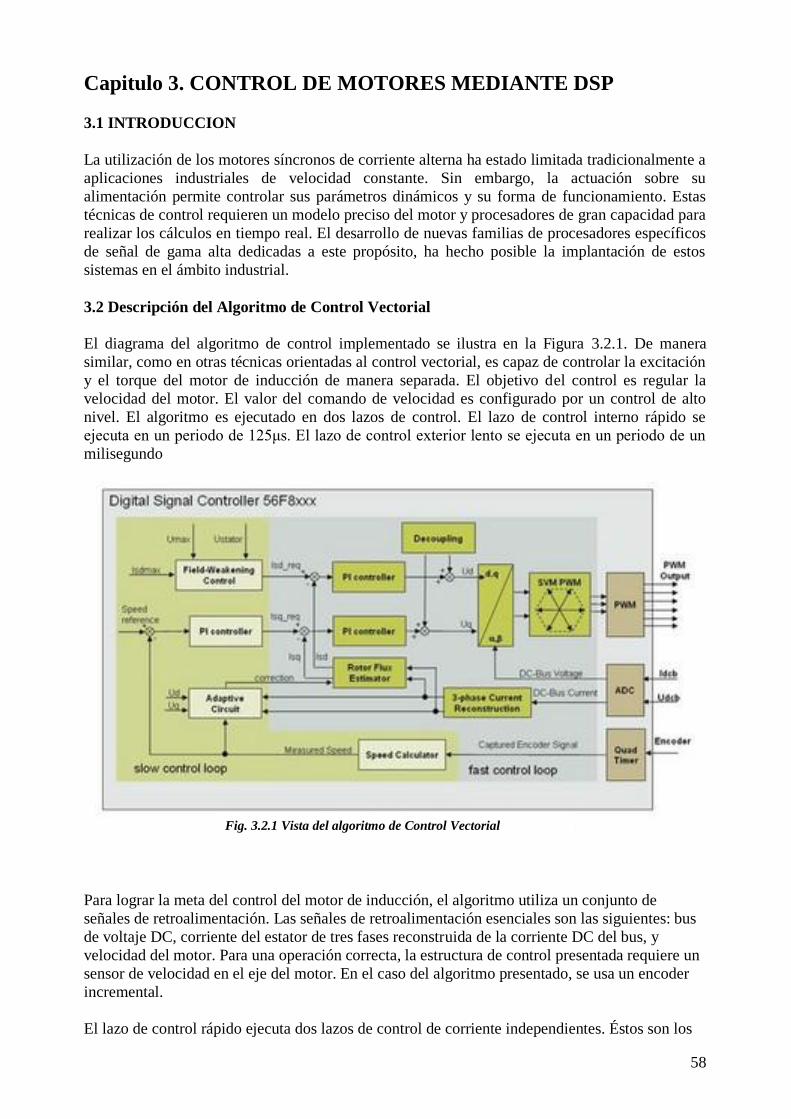
58
Capitulo 3. CONTROL DE MOTORES MEDIANTE DSP
3.1 INTRODUCCION
La utilización de los motores síncronos de corriente alterna ha estado limitada tradicionalmente a
aplicaciones industriales de velocidad constante. Sin embargo, la actuación sobre su
alimentación permite controlar sus parámetros dinámicos y su forma de funcionamiento. Estas
técnicas de control requieren un modelo preciso del motor y procesadores de gran capacidad para
realizar los cálculos en tiempo real. El desarrollo de nuevas familias de procesadores específicos
de señal de gama alta dedicadas a este propósito, ha hecho posible la implantación de estos
sistemas en el ámbito industrial.
3.2 Descripción del Algoritmo de Control Vectorial
El diagrama del algoritmo de control implementado se ilustra en la Figura 3.2.1. De manera
similar, como en otras técnicas orientadas al control vectorial, es capaz de controlar la excitación
y el torque del motor de inducción de manera separada. El objetivo del control es regular la
velocidad del motor. El valor del comando de velocidad es configurado por un control de alto
nivel. El algoritmo es ejecutado en dos lazos de control. El lazo de control interno rápido se
ejecuta en un periodo de 125μs. El lazo de control exterior lento se ejecuta en un periodo de un
milisegundo
Para lograr la meta del control del motor de inducción, el algoritmo utiliza un conjunto de
señales de retroalimentación. Las señales de retroalimentación esenciales son las siguientes: bus
de voltaje DC, corriente del estator de tres fases reconstruida de la corriente DC del bus, y
velocidad del motor. Para una operación correcta, la estructura de control presentada requiere un
sensor de velocidad en el eje del motor. En el caso del algoritmo presentado, se usa un encoder
incremental.
El lazo de control rápido ejecuta dos lazos de control de corriente independientes. Éstos son los
Fig. 3.2.1 Vista del algoritmo de Control Vectorial

59
controladores PI de corriente directa y eje de cuadratura (isd,isq). La corriente direct-axis (isd) se
usa para controlar el flujo magnetizante del rotor. La corriente eje de cuadratura (isq)
corresponde al torque del motor. Las salidas de corriente de los controladores PI se suman con
los componentes del eje d y q correspondientes del voltaje del estator desacoplado. De esta
forma, obtenemos el espacio-vector deseado para el voltaje del estator, que se aplica al motor. El
lazo de control rápido ejecuta todas las tareas necesarias para lograr un control independiente de
los componentes de corriente del estator. Esto incluye:
• Reconstrucción de la corriente de Tres-Fases
• Transformada Clark
• Transformada Park y Park de Reversa
• Evaluación de la Posición del Flujo Magnetizante del rotor
• Eliminación del Rizado del Voltaje DC-Bus
• Modulación Vectores Espaciales (SVM)
El lazo de control lento ejecuta los controladores de velocidad y desvanecimiento de campo
(field-weakening) y las tareas de control de baja prioridad. La salida del controlador de velocidad
PI establece una referencia para el componente eje de cuadratura que genera el torque de la
corriente del estator (isq). La referencia del componente eje directo de la corriente del estator que
produce flujo (isd) es establecida por el controlador de desvanecimiento de campo. El Circuito
Adaptivo lleva a cabo la corrección de la constante del tiempo del rotor para minimizar el error
de la estimación de la posición del flujo del rotor.
3.3 PROCESADOR DIGITAL DE SEÑAL
Un DSP es un sistema basado en un procesador o microprocesador que posee un juego de
instrucciones, un hardware y un software optimizados para aplicaciones que requieran
operaciones numéricas a muy alta velocidad. Debido a esto es especialmente útil para el
procesado y representación de señales analógicas en tiempo real: en un sistema que trabaje de
esta forma (tiempo real) se reciben muestras (samples en inglés), normalmente provenientes de
un conversor analógico/digital (ADC).
Se ha dicho que puede trabajar con señales analógicas, pero es un sistema digital, por lo tanto
necesitará un conversor analógico/digital a su entrada y digital/analógico en la salida. Como todo
sistema basado en procesador programable necesita una memoria donde almacenar los datos con
los que trabajará y el programa que ejecuta.
Si se tiene en cuenta que un DSP puede trabajar con varios datos en paralelo y un diseño e
instrucciones específicas para el procesado digital, se puede dar una idea de su enorme potencia
para este tipo de aplicaciones. Estas características constituyen la principal diferencia de un DSP
y otros tipos de procesadores.
Para adentrar en su funcionamiento se pondrá el ejemplo de un filtro: el DSP recibirá valores
digitales o samples procedentes de la señal de entrada, calcula qué salida se obtendrá para esos
valores con el filtro que se le ha programado y saca esa salida. Un posible sistema basado en un
DSP puede ser el siguiente:
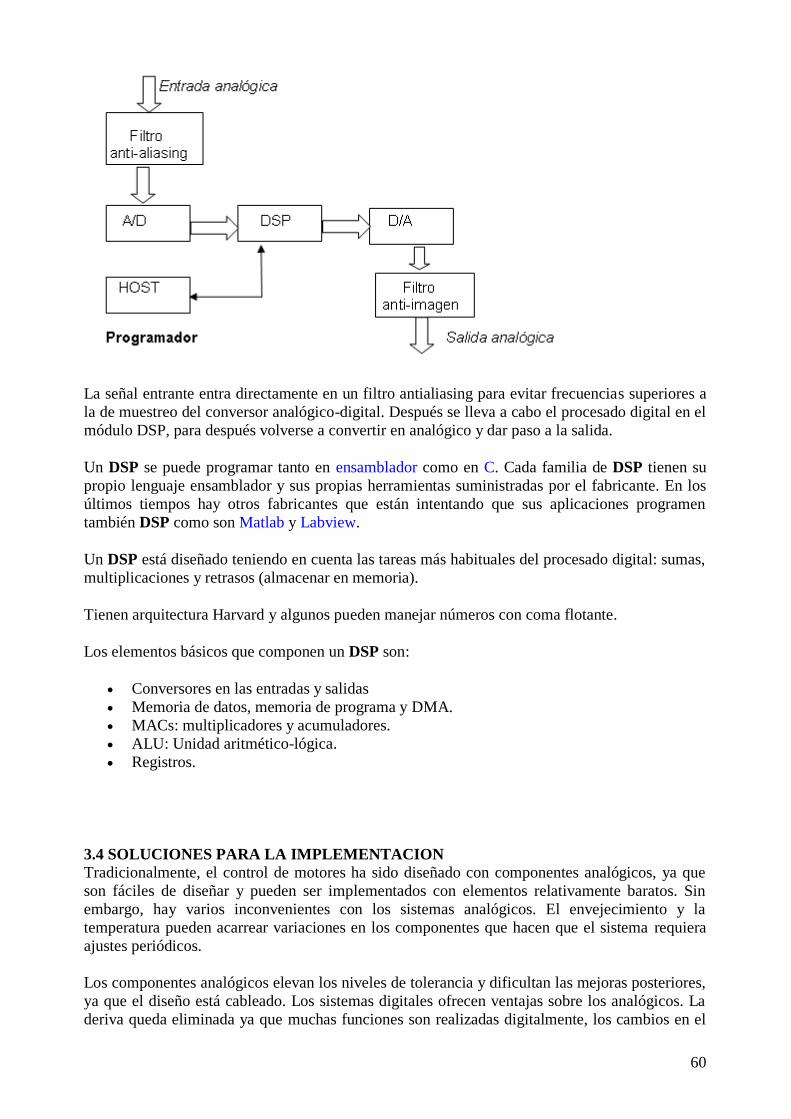
60
La señal entrante entra directamente en un filtro antialiasing para evitar frecuencias superiores a
la de muestreo del conversor analógico-digital. Después se lleva a cabo el procesado digital en el
módulo DSP, para después volverse a convertir en analógico y dar paso a la salida.
Un DSP se puede programar tanto en ensamblador como en C. Cada familia de DSP tienen su
propio lenguaje ensamblador y sus propias herramientas suministradas por el fabricante. En los
últimos tiempos hay otros fabricantes que están intentando que sus aplicaciones programen
también DSP como son Matlab y Labview.
Un DSP está diseñado teniendo en cuenta las tareas más habituales del procesado digital: sumas,
multiplicaciones y retrasos (almacenar en memoria).
Tienen arquitectura Harvard y algunos pueden manejar números con coma flotante.
Los elementos básicos que componen un DSP son:
Conversores en las entradas y salidas
Memoria de datos, memoria de programa y DMA.
MACs: multiplicadores y acumuladores.
ALU: Unidad aritmético-lógica.
Registros.
3.4 SOLUCIONES PARA LA IMPLEMENTACION
Tradicionalmente, el control de motores ha sido diseñado con componentes analógicos, ya que
son fáciles de diseñar y pueden ser implementados con elementos relativamente baratos. Sin
embargo, hay varios inconvenientes con los sistemas analógicos. El envejecimiento y la
temperatura pueden acarrear variaciones en los componentes que hacen que el sistema requiera
ajustes periódicos.
Los componentes analógicos elevan los niveles de tolerancia y dificultan las mejoras posteriores,
ya que el diseño está cableado. Los sistemas digitales ofrecen ventajas sobre los analógicos. La
deriva queda eliminada ya que muchas funciones son realizadas digitalmente, los cambios en el
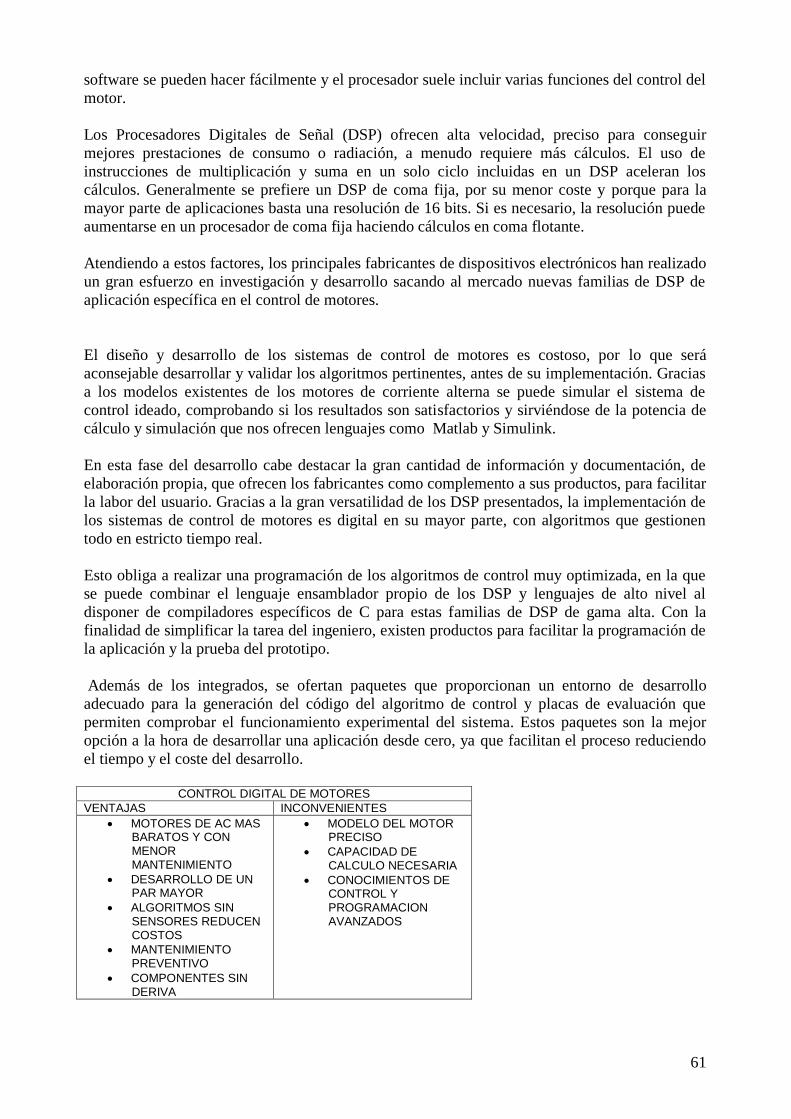
61
software se pueden hacer fácilmente y el procesador suele incluir varias funciones del control del
motor.
Los Procesadores Digitales de Señal (DSP) ofrecen alta velocidad, preciso para conseguir
mejores prestaciones de consumo o radiación, a menudo requiere más cálculos. El uso de
instrucciones de multiplicación y suma en un solo ciclo incluidas en un DSP aceleran los
cálculos. Generalmente se prefiere un DSP de coma fija, por su menor coste y porque para la
mayor parte de aplicaciones basta una resolución de 16 bits. Si es necesario, la resolución puede
aumentarse en un procesador de coma fija haciendo cálculos en coma flotante.
Atendiendo a estos factores, los principales fabricantes de dispositivos electrónicos han realizado
un gran esfuerzo en investigación y desarrollo sacando al mercado nuevas familias de DSP de
aplicación específica en el control de motores.
El diseño y desarrollo de los sistemas de control de motores es costoso, por lo que será
aconsejable desarrollar y validar los algoritmos pertinentes, antes de su implementación. Gracias
a los modelos existentes de los motores de corriente alterna se puede simular el sistema de
control ideado, comprobando si los resultados son satisfactorios y sirviéndose de la potencia de
cálculo y simulación que nos ofrecen lenguajes como Matlab y Simulink.
En esta fase del desarrollo cabe destacar la gran cantidad de información y documentación, de
elaboración propia, que ofrecen los fabricantes como complemento a sus productos, para facilitar
la labor del usuario. Gracias a la gran versatilidad de los DSP presentados, la implementación de
los sistemas de control de motores es digital en su mayor parte, con algoritmos que gestionen
todo en estricto tiempo real.
Esto obliga a realizar una programación de los algoritmos de control muy optimizada, en la que
se puede combinar el lenguaje ensamblador propio de los DSP y lenguajes de alto nivel al
disponer de compiladores específicos de C para estas familias de DSP de gama alta. Con la
finalidad de simplificar la tarea del ingeniero, existen productos para facilitar la programación de
la aplicación y la prueba del prototipo.
Además de los integrados, se ofertan paquetes que proporcionan un entorno de desarrollo
adecuado para la generación del código del algoritmo de control y placas de evaluación que
permiten comprobar el funcionamiento experimental del sistema. Estos paquetes son la mejor
opción a la hora de desarrollar una aplicación desde cero, ya que facilitan el proceso reduciendo
el tiempo y el coste del desarrollo.
CONTROL DIGITAL DE MOTORES
VENTAJAS INCONVENIENTES
MOTORES DE AC MAS BARATOS Y CON MENOR MANTENIMIENTO
DESARROLLO DE UN PAR MAYOR
ALGORITMOS SIN SENSORES REDUCEN COSTOS
MANTENIMIENTO PREVENTIVO
COMPONENTES SIN DERIVA
MODELO DEL MOTOR PRECISO
CAPACIDAD DE CALCULO NECESARIA
CONOCIMIENTOS DE CONTROL Y PROGRAMACION AVANZADOS
CONCLUSIONES
Mediante la técnica de control vectorial se logra un control independiente de velocidad y flujo.
Esta técnica permite implementar un control de flujo de forma tal que se consigue extender el
rango de velocidad del motor y optimizar la producción de torque en dicho rango, es decir,
gracias al control vectorial de los motores de c.a., se consigue que éstos puedan girar a velocidad
variable, sin problemas de estabilidad ni de arranque. Esto revierte en un mejor comportamiento
de los motores que, guiados durante su arranque, pueden desarrollar un par mayor y conseguir
mejores prestaciones de consumo y radiación. Además, el nivel de prestaciones dinámicas que se
obtiene es similar a los de los motores de c.c., por lo general más caros y de mantenimiento más
costoso. Esto ha generado un gran interés de la industria en la introducción de estos
accionamientos de velocidad variable. Pero estas técnicas requieren un modelo detallado del
motor y un conocimiento preciso de sus parámetros, además de cálculos complejos en cada ciclo
de control. Por ello es imprescindible tener la capacidad de cálculo en tiempo real de los DSP.
Las nuevas familias de μP específicos DSP para control de motores facilitan la integración de
estas técnicas en la industria, y los entornos de programación ofrecidos simplifican la
implementación de los algoritmos de control y su análisis.

63
BIBLIOGRAFÍA
[1] Enríquez Harper: Curso de transformadores y motores de inducción.
Ed. Limusa, 4a Edición, PP. 570.
[2] Irving L. Kosow Ph. D: Maquinas eléctricas y transformadores. Ed. Limusa,
2ª Edición, PP. 685.
[3] Ponce Cruz Pedro, Sampe López Javier: Maquinas eléctricas y técnicas
Modernas de control. Ed. Alfa Omega, PP. 346, Nov. 2008.
[4] Ing. Gamal Mahmoud Ali Sowilam: Application of neural networks on vector
control systems of induction motors. PP. 200, Año, 2000, Polytechnic Universitry of
Catalonia.
[5] Cesar Alejandro Frausto Davila: Nueural networks on vector control systems of
induction motors. PP. 180, Mayo/2008.
[6] www.scribd.com/library/
