robótica industrial
DESCRIPTION
Movimiento rigido y transformaciones homogeneasTRANSCRIPT

• INGENIERIA MECATRONICA
ROBOTICA INDUSTRIAL
3.1 MOVIMIENTO RIGIDO Y TRANSFORMACIONES HOMOGENEAS
Victoria de Durango, Dgo. A 11 de abril de 2013
Robótica
INDICE
• UNIDAD 3 CINEMATICA• 3.1 MOVIMIENTO RIGIDO Y
TRAMSFORMACIONES HOMOGENEAS• 3.1.1 ROTACIONES• 3.1.2 COMPOSISCIONES DE ROTACIONES• 3.1.3 PROPIEDADES DE LAS ROTACIONES• 3.1.4 MATRICES ANTISIMETRICAS• 3.1.5 MATRICES Y TRANSFORMACIONES
HOMOGENEAS
CINEMATICA.
• La cinemática es una rama de la física que estudia las leyes del movimiento (cambios de posición) de los cuerpos, sin tomar en cuenta las causas (fuerzas) que lo producen, limitándose esencialmente, al estudio de la trayectoria en función del tiempo. La aceleración es el ritmo con que cambia su rapidez (módulo de la velocidad). La rapidez y la aceleración son las dos principales cantidades que describen cómo cambia su posición en función del tiempo.

Elementos básicos de la cinemática
Los elementos básicos de la cinemática son:
• Espacio: El espacio físico es el espacio donde se encuentran los objetos y en el que los eventos que ocurren tienen una posición y dirección relativas
• Tiempo: el período que transcurre entre el estado del sistema cuando éste presentaba un estado X y el instante en el que X registra una variación perceptible
• Móvil: objeto en movimiento del que se quiere estudiar su trayectoria
o las fuerzas que lo acompañan.

CINEMATICA DE ROBOTS
• La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Así, la cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función del tiempo, y en particular por las relaciones entre la posición y la orientación del extremo final del robot con los valores que toman sus coordenadas articulares

• Por otra parte, la cinemática del robot trata también de encontrar las relaciones entre las velocidades del movimiento de las articulaciones y las del extremo

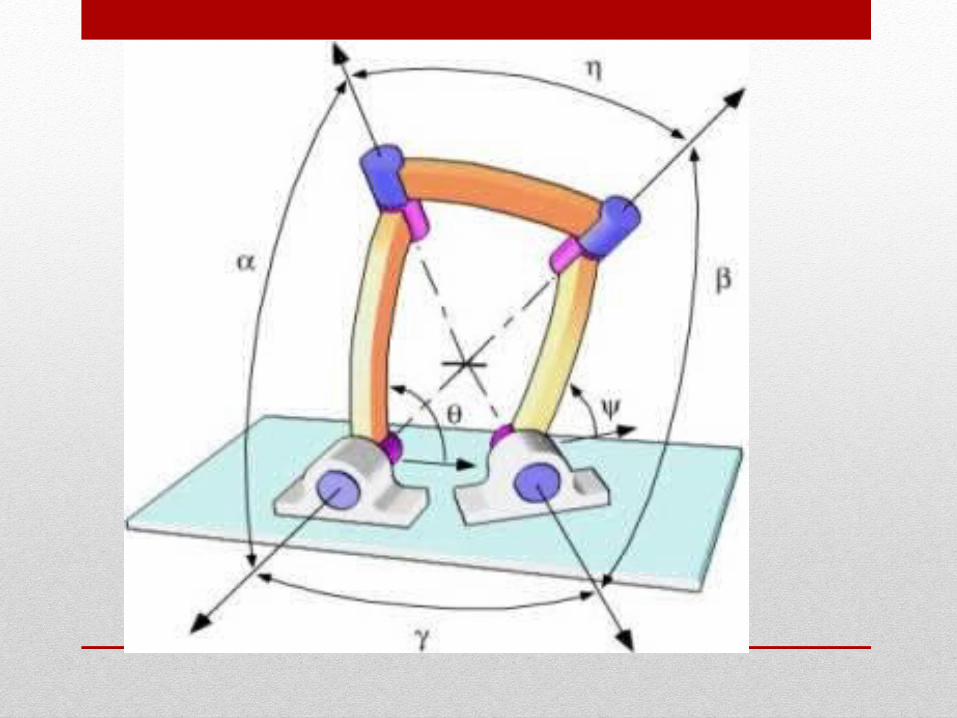
CINEMATICA DEL BRAZO ROBOT
• El movimiento relativo en las articulaciones resulta en el movimiento de los elementos que posicionan la mano en una orientación deseada. En la mayoría de las aplicaciones de robótica, se esta interesado en la descripción espacial del efector final del manipulador con respecto a un sistema de coordenadas de referencia fija
• La cinemática del brazo del robot trata con el estudio analítico de la geometría del movimiento de un robot con respecto a un sistema de coordenadas de referencia fijo como una función del tiempo sin considerar las fuerzas-momentos que originan dicho movimiento. Así pues, trata con la descripción analítica del desplazamiento espacial del robot como función del tiempo, en particular las relaciones entre variables espaciales de tipo de articulación y la posición y orientación del efector final del robot.

MOVIMIENTO RIGIDO Y TRANSFORMACIONES HOMOGENEAS

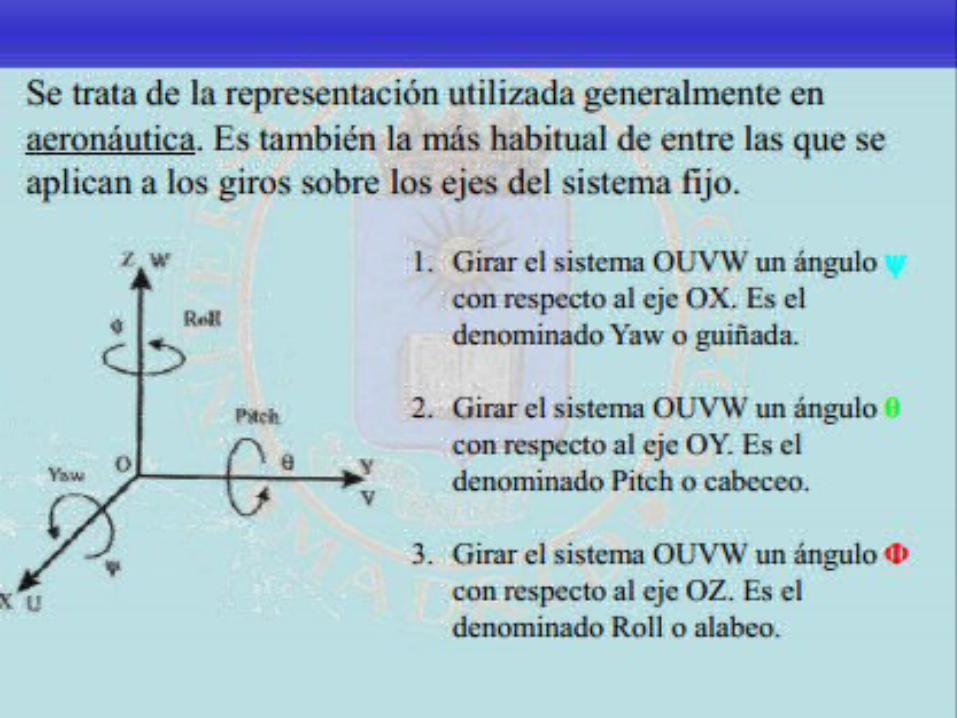
Movimiento de rotaciónSe dice que un sólido rígido está animado de un movimiento de rotación alrededor de un eje fijo cuando todos sus puntos describen trayectorias circularescentradas sobre dicho eje y contenidas en planos normales a éste.
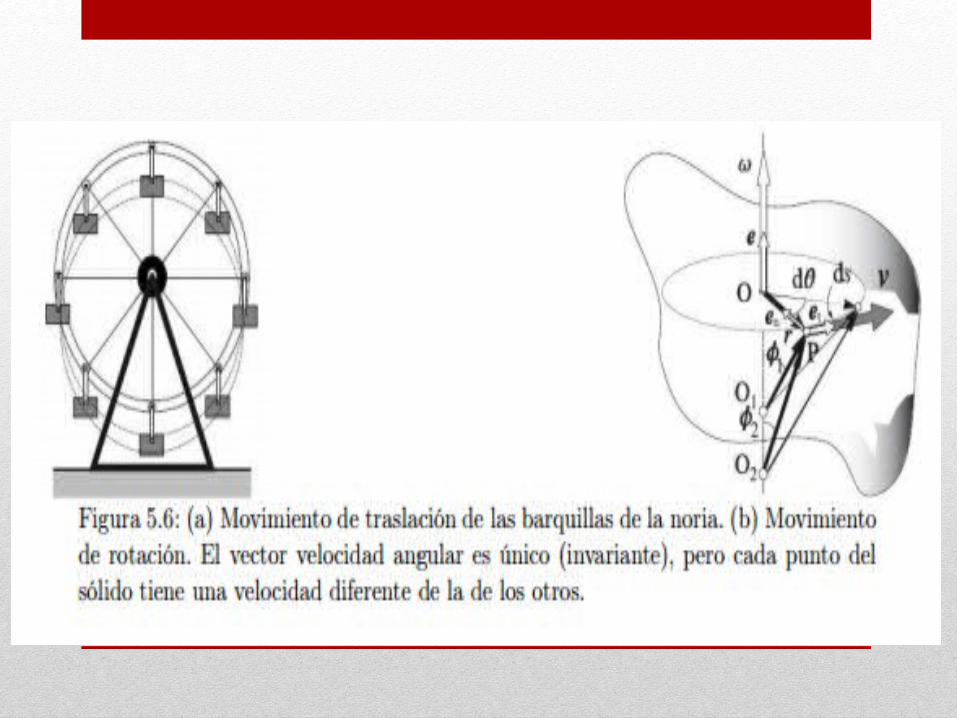

El eje de rotación puede atravesar el cuerpo o ser exterior al mismo; en el primer caso, los puntos del sólido que están sobre el eje permanecen en reposo en tanto que los demás puntos describen circunferencias en torno al eje; en el segundo caso, todos los puntos del sólido están en movimiento circular alrededor del eje exterior al sólido. En cualquier caso, la velocidad v de un punto P del sólido será tangente a la circunferencia descrita y, en un instante dado, tendrá un módulo tanto mayor cuanto mayor sea la distancia del punto al eje de rotación. Dicha velocidad viene dada por

v = veˆt• siendo eˆt un vector unitario (de módulo igual a la
unidad) tangente a la trayectoria y v el módulo de la velocidad. Téngase en cuenta que necesariamente eˆt cambiará a lo largo del movimiento, ya que irá continuamente modificando su dirección hasta llegar de nuevo a la orientación original, tras completar un giro de 2π radianes.

El módulo de la velocidad, denominado celeridad, se corresponde con
v = ds / dt
considerando s la distancia que el sólido va recorriendo a lo largo de la circunferencia. Dada la definición matemática de ángulo θ = s / r, se verifica que ds = r dθ, para lo cuál habrá que expresar el ángulo en radianes (rad). De aquí se deduce que
v = ds / dt = r ( dθ / dt )

• El cociente dθ / dt recibe el nombre de celeridad angular y se designa por ω:
• ω = dθ / dt
• y podemos expresar la celeridad v de cualquier punto del sólido como el producto
• de la celeridad angular por la distancia r del punto al eje de rotación
• v = ωr

La introducción del concepto de celeridad angular es de gran importancia porla simplificación que supone en la descripción del movimiento de rotación delsólido, ya que, en un instante dado, todos los puntos del sólido poseen la misma celeridad angular, en tanto que a cada uno de ellos le corresponde una celeridad que es función de su distancia al eje de rotación. Así pues, la celeridad angular caracteriza al movimiento de rotación del sólido rígido en torno a un eje fijo. La celeridad angular se mide en radianes por segundo (rad/s).

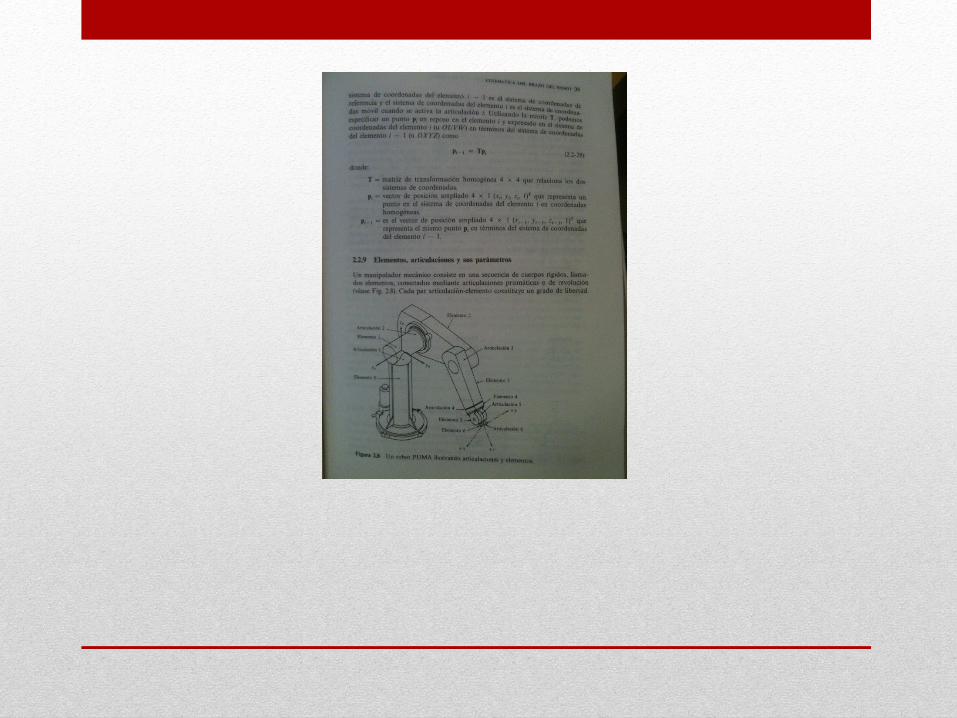
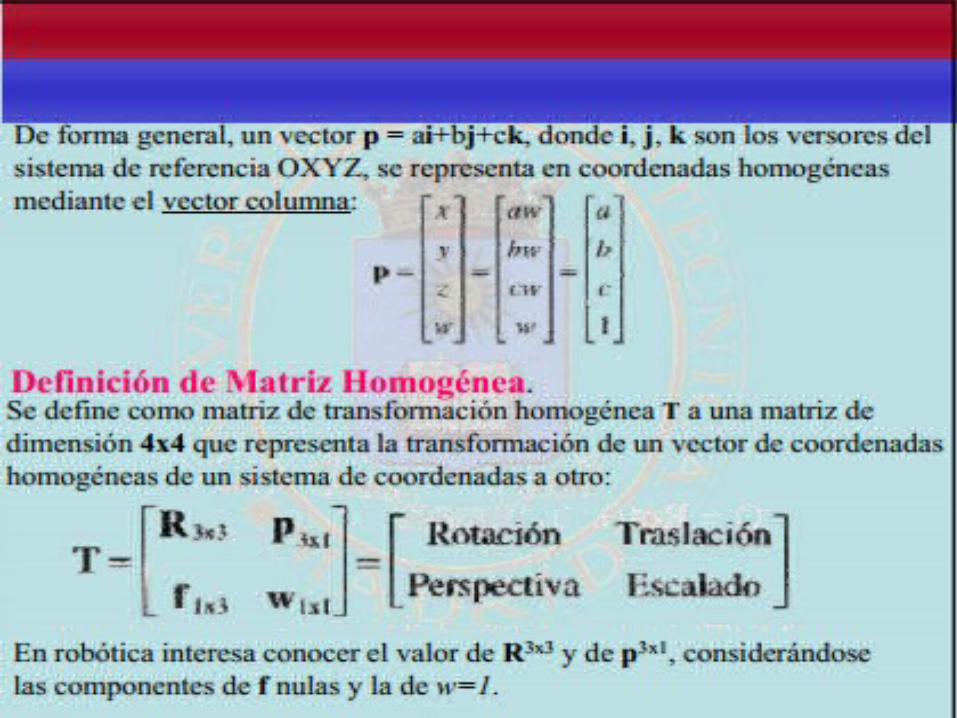
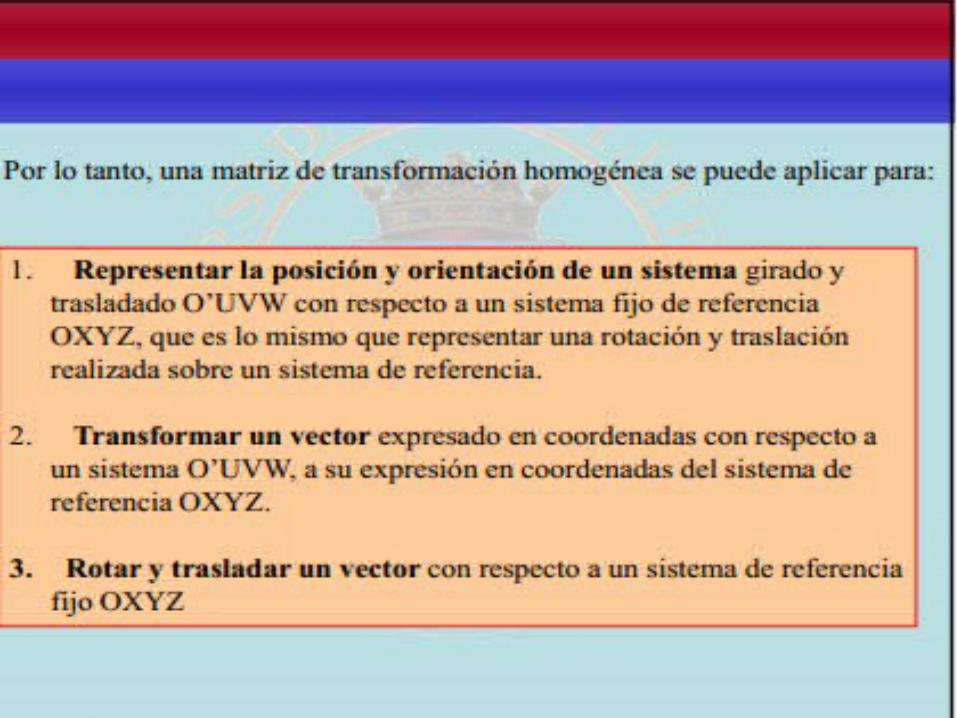
TRANSFORMACIONES HOMOGENEAS• Para robots de más grados de libertad puede plantearse
un método sistemático basado en la utilización de las matrices de transformación homogénea.En general, un robot de n grados de libertad esta formado por n eslabones unidos por n articulaciones, de forma que cada par articulación-eslabón constituye un grado de libertad. A cada eslabón se le puede asociar un sistema de referencia solidario a el y, utilizando las transformaciones homogéneas, es posible representar las rotaciones y traslaciones relativas entre los distintos eslabones que componen el robot.

• Normalmente, la matriz de transformación homogénea que representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot se le suele denominar ( i-1)1/Ai. Así pues, 0Ai describe la posición y orientación del sistema de referencia solidario al primer eslabón con respecto al sistema de referencia solidario a la base, 1A2 describe la posición y orientación del segundo eslabón respecto del primero, etc. Del mismo modo, denominando 0Ak a las matrices resultantes del producto de las matrices ( i-1)Ai con i desde 1 hasta k, se puede representar de forma total o parcial la cadena cinemática que forma el robot.




Matriz antisimetrica• Una matriz es antisimétrica cuando es una matriz
cuadrada, y es igual a la opuesta de su traspuesta.• Una matriz de m x n elementos (m = filas, n =
columnas) :

• es antisimétrica (o hemisimétrica), si es una matriz cuadrada (m = n) y para todo i, j =1,2,3,...,n. En consecuencia, para todo i. Por lo tanto, la matriz A asume la forma:

Ejemplo
La diagonal principal se conserva y todos los otros números son cambiados de signo al opuesto.Nótese que la matriz traspuesta de la matriz antisimétrica A es -A, y que la antisimetría es respecto a la diagonal principal.Si n=m es impar el determinante de la matriz siempre será 0.



CONCLUSIONES
• LA ROTACION EN UN ROBOT ES MUY IMPORTANTE PARA ESTE PORQUE NOS PERMITE OPTIMIZAR EL ESPACIO O AREA DE TRABAJO Y CALCULAR SUS MOVMIENTOS, ASI COMO SABER LAS POSICIONES DE CADA UNO DE SUS COMPONENTES Y EL PODER UTILIZAR MODELOS MATEMATICOS COMO MATRICES PARA CONOCER EXACTAMENTE LAS COORDENADAS DE CADA UNA DE LAS ARTICULACIONES Y EL COMPORTAMIENTO DEL ROBOT.

REFERENCIAS BIBLIOGRAFICAS Y VIRTUALES
• INDUSTRIAL ROBOTICS, MIKELL P. GROOVER, MITCHELL WEISS, ROGER N. NAGEL. EDITORIAL MC GRAW HILL 1986
• ROBOTICA, K.S.FU, R.CC GONZALEZ, C.S.G. LEE. EDITORIAL MC GRAW HILL 1988
http://www.industriaynegocios.cl/Academicos/AlexanderBorger/Docts%20Docencia/Seminario%20de%20Aut/trabajos/2004/Rob%C3%B3tica/seminario%202004%20robotica/Seminario_Robotica/Documentos/CINEM%C3%81TICA%20Directa.htm