remled i - connecting repositories · generan en las diferentes articulaciones debido a los...
TRANSCRIPT

37››
REMLED I
Robot escalador para mantenimientoy limpieza de edificios
Ing. Eduardo Calle Ing. Israel Ávila
Ing. Julio Zambrano Unidad de Investigación
UPS - Cuenca
38 ››
INTRODUCCIÓNEn la actualidad, el dise-
ño de sistemas de locomo-ción de robots caminantesse ha derivado del estudiode sistemas biológicos [1],especialmente de animalesterrestres comunes, en losque se puede observar unsistema de locomoción ba-sado en un conjunto de es-labones y articulacionesdenominadas patas. La na-turaleza ha encontrado através de millones de añosde evolución un sistemaóptimo para el desplaza-miento sobre terrenos irre-gulares, basado en el apo-yo discreto de las patas so-bre el terreno, a lo quenormalmente se denominapasos. Las máquinas cami-nantes aprovechan este ti-po de locomoción ya seamediante uno o más pun-tos de apoyo (monópodos,bípedos, cuadrúpedos, he-xápodos, etc.), convirtién-dolas en las máquinasideales para espacios peli-grosos y de difícil acceso.Por otra parte, estas má-quinas exigen sistemas me-cánicos y de control máscomplejos que los usadospor sistemas con ruedas,así como mayores nivelesde sensorización, que has-ta el momento limitan quesean industrialmente ren-tables, ya que los costos defabricación y manteni-miento son mucho máselevados que otros tiposde robots. Las principalescaracterísticas que presen-tan las máquinas caminan-tes son [2] [3]:
• Gran omnidireccionali-dad.
• Capacidad de adapta-ción al terreno.
• Control de las fuerzasen los puntos de apoyo.
• Apoyos discretos en elterreno.La mayoría de robots
caminantes están destina-dos a la exploración de te-rrenos irregulares inase-quibles para el ser humano[4] [5]. Entre las principalesaplicaciones de estas má-quinas están la detecciónde minas personales, trans-portación de equipos y he-rramientas de construc-ción, trabajos de foresta-ción, limpieza de fachadas,entre otros. La figura 1muestra al robot caminan-te SILO 6 [2] desarrolladopor el Instituto de Auto-mática Industrial – CSIC enMadrid, para la detecciónde minas antipersonales.
Por todas las caracterís-ticas mencionadas, las má-quinas caminantes se con-vierten en mecanismos idó-neos para desplazarse nosólo por superficies hori-zontales, sino también porsuperficies con cierto gra-do de inclinación o comple-tamente verticales. En esteúltimo caso, estos mecanis-mos toman el nombre derobots escaladores.
REMLED constituye elsistema de transporte de
herramientas del proyectoARTE (Acondicionamientoy Restauración Tele-opera-da de Edificios), que pre-tende implementar tecno-logía innovadora para lalimpieza y mantenimientode fachadas de edificiosde múltiples pisos median-te el uso de un robot esca-lador cuadrúpedo tele-operado, evitando el ries-go que implica el uso depersonas para realizar di-cha tarea.
A continuación se expo-ne una breve descripcióndel diseño e implementa-ción de una plataformamóvil como herramientade investigación en modosde caminar de robots cua-drúpedos, y que permitaademás el estudio de mé-todos de locomoción pararobots escaladores.
DISEÑO MECÁNICO INI-CIAL Y ANÁLISIS DE PARÁMETROS
Diseño mecánicoEn [6][7] se presentan
diversas estructuras de ro-bots cuadrúpedos que per-miten múltiples configura-ciones de las patas duranteel proceso de locomoción.
La estructura básica deREMLED está constituidapor el cuerpo y cuatro pa-tas. Cada pata está confor-mada por cuatro eslabones,tres de los cuales se en-cuentran unidos a travésde articulaciones rotaciona-les operadas (véase figura2) por el movimiento deleje de un motor, dando untotal de 12 grados de liber-tad a todo el sistema. El úl-timo eslabón (eslabón 4)está unido a su predecesor
Actualmente, el diseñode sistemas de locomo-ción de robots caminan-tes se ha derivado del es-tudio de sistemas biológi-cos, especialmente deanimales terrestres co-munes, en los cuales seobserva un sistema de lo-comoción basado en esla-bones y articulaciones de-nominadas patas
por medio de una articula-ción universal no actuadaque proporciona dos gra-dos de libertad más al ex-tremo final de la pata.
Una plataforma cuadra-da permite la instalación delas cuatro patas y de los dis-positivos electrónicos re-queridos para el control,constituyéndose en la baseestructural del cuerpo deREMLED. Las patas estándispuestas en el cuerpo deforma simétrica en cada es-quina, de manera que elcentro de gravedad se en-cuentre en el eje central delcuerpo y los esfuerzos reali-zados por cada pata se dis-tribuyan uniformemente.
Se ha diseñado el siste-ma para optimizar el con-sumo energético, medianteel uso de motores con me-canismos autobloqueantes,lo que permite que no exis-ta consumo de energíacuando el robot se encuen-tra detenido.
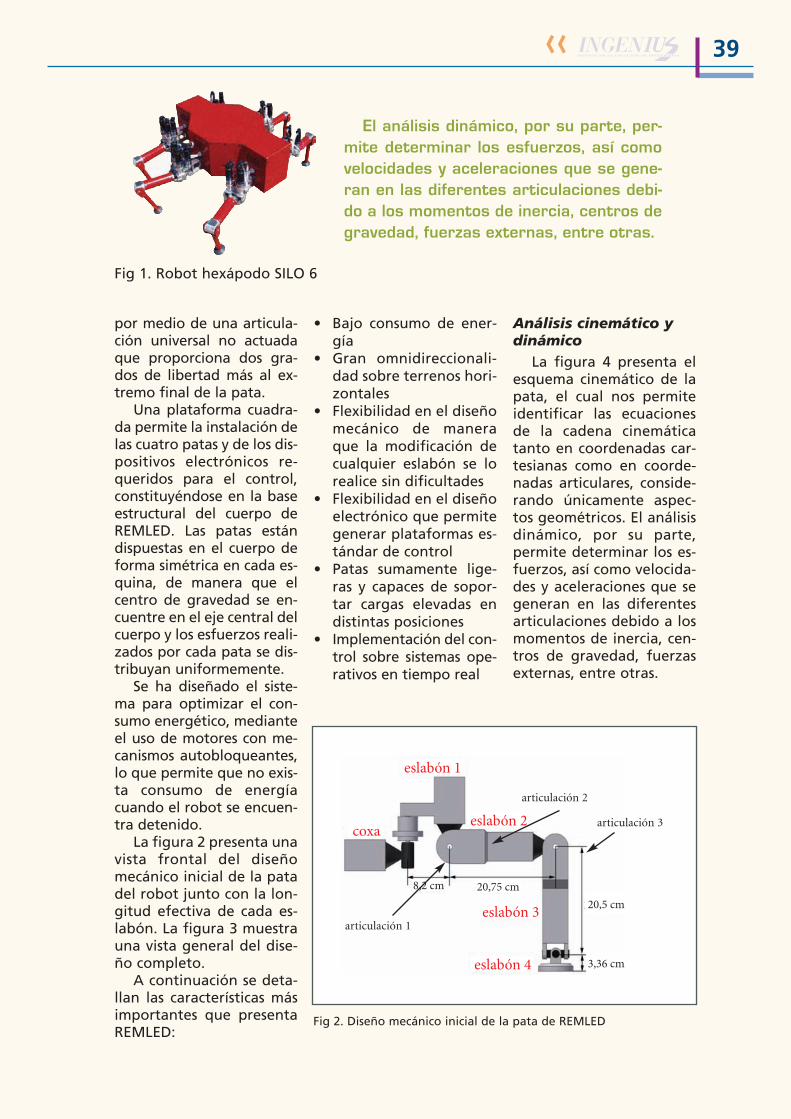
La figura 2 presenta unavista frontal del diseñomecánico inicial de la patadel robot junto con la lon-gitud efectiva de cada es-labón. La figura 3 muestrauna vista general del dise-ño completo.
A continuación se deta-llan las características másimportantes que presentaREMLED:
• Bajo consumo de ener-gía
• Gran omnidireccionali-dad sobre terrenos hori-zontales
• Flexibilidad en el diseñomecánico de maneraque la modificación decualquier eslabón se lorealice sin dificultades
• Flexibilidad en el diseñoelectrónico que permitegenerar plataformas es-tándar de control
• Patas sumamente lige-ras y capaces de sopor-tar cargas elevadas endistintas posiciones
• Implementación del con-trol sobre sistemas ope-rativos en tiempo real
Análisis cinemático ydinámico
La figura 4 presenta elesquema cinemático de lapata, el cual nos permiteidentificar las ecuacionesde la cadena cinemáticatanto en coordenadas car-tesianas como en coorde-nadas articulares, conside-rando únicamente aspec-tos geométricos. El análisisdinámico, por su parte,permite determinar los es-fuerzos, así como velocida-des y aceleraciones que segeneran en las diferentesarticulaciones debido a losmomentos de inercia, cen-tros de gravedad, fuerzasexternas, entre otras.
39››
El análisis dinámico, por su parte, per-mite determinar los esfuerzos, así comovelocidades y aceleraciones que se gene-ran en las diferentes articulaciones debi-do a los momentos de inercia, centros degravedad, fuerzas externas, entre otras.
Fig 1. Robot hexápodo SILO 6
Fig 2. Diseño mecánico inicial de la pata de REMLED
articulación 1
articulación 2
articulación 3
Las ecuaciones (1) (2) y(3) representan el análisisde la cinemática inversa dela pata del robot.
Donde:• l1, l2, l3 y l4 son las lon-
gitudes de los cuatro es-labones respectivos queconforman la pata.
• ı1, ı2, y ı3 son los des-
plazamientos angularesde las articulacionesuno, dos y tres respecti-vamente.
• ax, ay y az son las coor-
denadas de la posicióndel extremo final.
Las ecuaciones del es-quema cinemático inversopermiten generar trayec-torias determinadas parala locomoción del robot. Elanálisis dinámico puedeser realizado mediante elapoyo de ordenadores,utilizando programas in-formáticos o librerías co-merciales especializadascomo yobotics, simulink,20sim o software libre co-mo la librería Modélica es-
pecializada en la simula-ción de sistemas físicos. Lafigura 5 presenta el torquegenerado por cada una delas articulaciones duranteuna trayectoria determina-da de locomoción.
Definición de actuadoresEl modelo cinemático y
dinámico permiten deter-minar los parámetros ne-cesarios para la construc-ción del robot, tales comoaltura de paso, longitudde paso y esfuerzos reali-
zados por las articulacio-nes. Este último es uno delos parámetros más im-portantes ya que permitedimensionar la capacidadde los actuadores que ge-neran el movimiento dedichas articulaciones.
Mediante el análisis di-námico se determinó que,en una configuración tipoinsecto, la articulación 2 esla que mayor esfuerzo rea-liza, seguida de la articula-ción 3 y finalmente la arti-culación 1.
40 ››
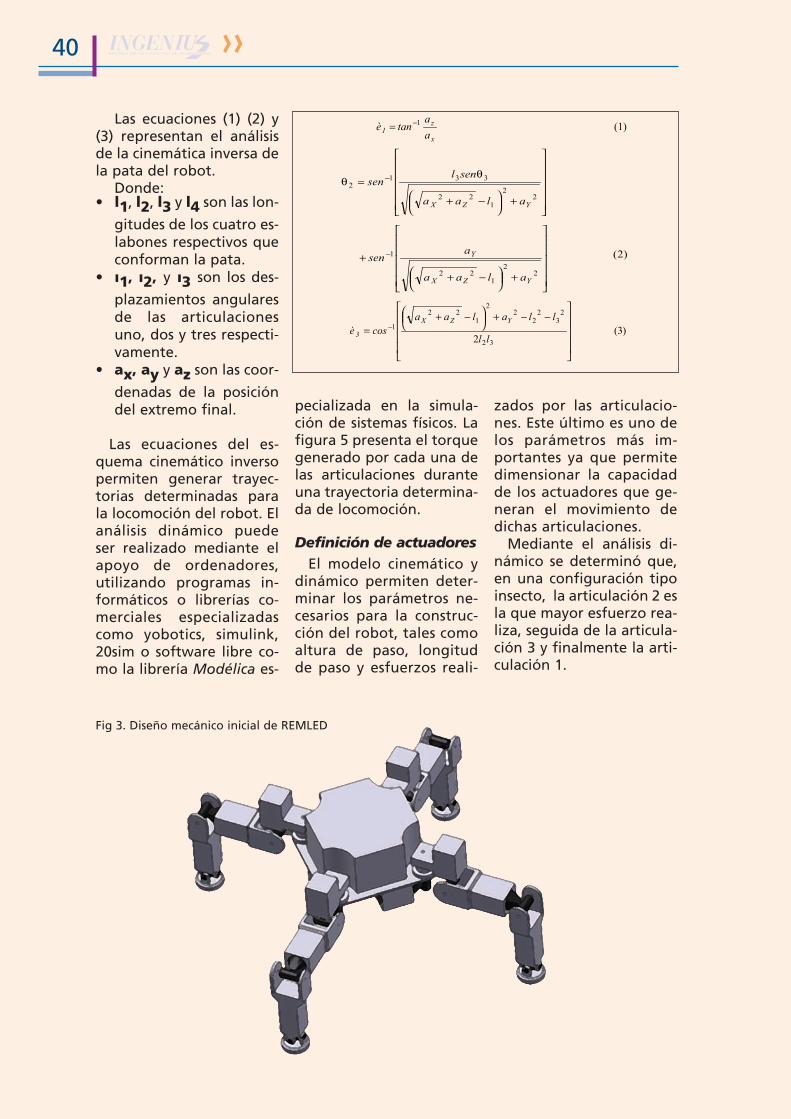
Fig 3. Diseño mecánico inicial de REMLED

Debido a los elevadostorques generados en lasarticulaciones, se buscó laimplementación de actua-dores con sistema de auto-bloqueo, derivando el es-fuerzo necesario paramantener la posición sobreel sistema mecánico y nosobre el actuador eléctrico.Por otra parte, uno de losobjetivos del proyecto eradesarrollar una plataformamóvil de bajo costo, por loque se implementaron ac-tuadores comerciales consistemas mecánicos de au-tobloqueo como el presen-tado en la figura 6, queeviten los gastos económi-cos derivados de la cons-
trucción de sistemas mecá-nicos complejos.
El sistema anterior estáformado de un tornillosinfín, acoplado al eje derotación del motor, y deun piñón cuyo eje de rota-ción constituye la salidafinal del sistema. El movi-miento rotacional del tor-nillo hace que el piñóngire con una determinadavelocidad. La aplicación demovimiento sobre el piñóngenera una fuerza axial altornillo, lo que impide sumovimiento, bloqueandocompletamente el sistema.
Además del sistema deautobloqueo, el actuadordebe tener un sistema de
reducción para aumentarel par de salida y disminuirla velocidad. Estas condi-ciones se han encontradoen los motores DC 404 747Valeo (véase figura 7).
Diseño final
El diseño mecánico finalconsidera la geometríaexacta de los actuadores,por lo que todos los ele-mentos mecánicos queconforman el robot debenser modificados para per-mitir el acoplamiento condichos actuadores. Ademásde esta consideración sehan realizado ciertas modi-ficaciones para reducir elpeso de los elementosmecánicos y para mejorarla eficiencia de la máquina.
41››
El modelo cinemático ydinámico permiten deter-minar los parámetros ne-cesarios para la cons-trucción del robot, talescomo altura de paso, lon-gitud de paso y esfuerzosrealizados por las articu-laciones
Fig 4. Esquema cinemático de la pata del robot
Fig 5. Torques ejercidos por las articulaciones de una de las patas delrobot durante una trayectoria determinada de locomoción.
Fig 6. Sistema de autobloqueo

La geo-metría de los
actuadores pre-senta una gran venta-
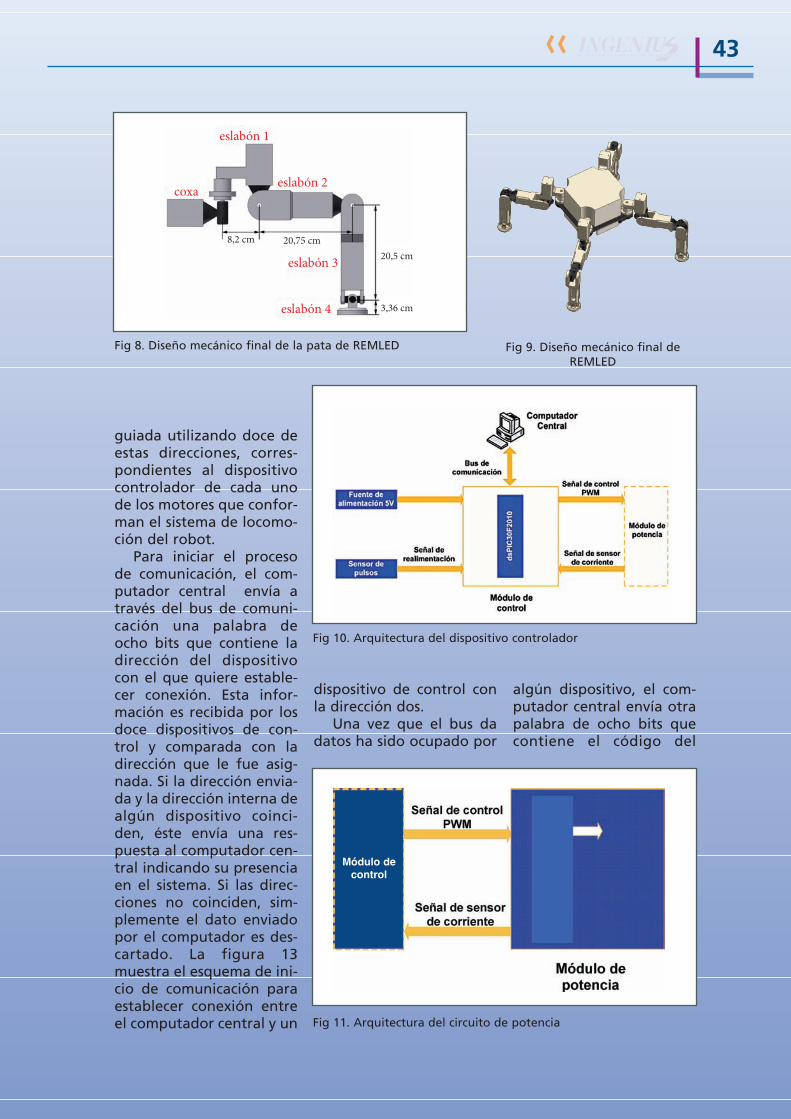
ja para el diseño, ya que eleje de salida final es per-pendicular al eje delmotor, lo que facilita elacoplamiento del actua-dor a los eslabones. Lafigura 8 muestra una vistafrontal del diseño mecáni-co final de la pata delrobot junto con la longi-tud efectiva de cada esla-bón. La figura 9 presentauna vista general del dise-ño completo en aluminiocon un peso de 17 kg.
ARQUITECTURA DEL SISTEMA
En el sistema electrónicode control se pueden iden-tificar dos tipos de arqui-tecturas: la arquitecturafísica y la arquitectura lógi-
ca. La primera define lamanera como están conec-tados todos los dispositivosnecesarios para el controldel robot, mientras que lasegunda establece lacomunicación que se reali-za entre los dispositivos.
Arquitectura físicaLa parte central de la
arquitectura de REMLED laconstituye un computadorpersonal encargado deadministrar la comunica-ción entre los diferentesmódulos de control. Cadamódulo de control gobier-na el movimiento de unapata del robot, y consta detres microcontroladoresdsPIC30F2010 encargadosde controlar la posición yvelocidad de los actuado-res. Todos los microcontro-ladores están comunicadoscon el computador perso-
nal a través de un puertoparalelo utilizando un pro-tocolo de comunicaciónpropietario, de maneraque el intercambio deinformación se lo realicepor técnicas de multiplexa-ción. La figura 10 muestraun diagrama de la arqui-tectura de un dispositivocontrolador.
La salida de controlgenerada por cada micro-controlador es ingresada aun amplificador de poten-cia, conformado de tresamplificadores indepen-dientes, cuyas salidas sonconectadas a los motoresque constituyen la pata delrobot. La arquitectura físi-ca del circuito de potenciase muestra en la figura 11.
En la figura 12 se obser-va la arquitectura generaldel robot constituida porel computador central, losmódulos de control, losmódulos de potencia y losactuadores.
Arquitectura lógica
Para establecer la comu-nicación entre los dispositi-vos de control y el compu-tador central, cada micro-controlador posee unadirección física que loidentifica dentro del siste-ma. La comunicación es
42 ››
El diseño mecánico final considerala geometría exacta de los actuado-res, por lo que todos los elementosmecánicos que conforman el robotdeben de ser modificados para per-mitir el acoplamiento con dichosactuadores.
Fig 7. Motor DC 404 747 Valeo
TABLA 1.
Características motor DC 404 747 Valeo.
Voltaje nominal [UN] 12V.Torque nominal [MN] 3N-m.Velocidad nominal [n0] 21 rpm.Duración máxima de encendido 10 min.Torque inicial [MA] 19.6N-m.Relación de reducción [i] 210/1Inercia del rotor [JR] 9.5x10-6 kg-m2.Peso 0.44 kg.
guiada utilizando doce deestas direcciones, corres-pondientes al dispositivocontrolador de cada unode los motores que confor-man el sistema de locomo-ción del robot.
Para iniciar el procesode comunicación, el com-putador central envía através del bus de comuni-cación una palabra deocho bits que contiene ladirección del dispositivocon el que quiere estable-cer conexión. Esta infor-mación es recibida por losdoce dispositivos de con-trol y comparada con ladirección que le fue asig-nada. Si la dirección envia-da y la dirección interna dealgún dispositivo coinci-den, éste envía una res-puesta al computador cen-tral indicando su presenciaen el sistema. Si las direc-ciones no coinciden, sim-plemente el dato enviadopor el computador es des-cartado. La figura 13muestra el esquema de ini-cio de comunicación paraestablecer conexión entreel computador central y un
dispositivo de control conla dirección dos.
Una vez que el bus dadatos ha sido ocupado por
algún dispositivo, el com-putador central envía otrapalabra de ocho bits quecontiene el código del
43››
Fig 8. Diseño mecánico final de la pata de REMLED
Fig 10. Arquitectura del dispositivo controlador
Fig 11. Arquitectura del circuito de potencia
Fig 9. Diseño mecánico final deREMLED
Módulo decontrol

asunto a tratar, tales comoconfiguración de la veloci-dad de referencia, veloci-dad sensada, etc.Establecido el argumentoa tratar, el dispositivo decontrol empieza a enviarlos datos solicitados por elcomputador central y vice-versa. Una vez enviado eldato, el bus es liberado yqueda disponible paraotra tarea.
ADMINISTRACIÓN DELSISTEMA
El control de cada unade las articulaciones para
la locomoción del robot serealiza a través de un pro-grama llamado “CMRv1.12.06” (Control para elMovimiento de REMLED).El sistema fue diseñadosobre LabVIEWTM 7.1 yproporciona un entornográfico que permite alusuario interactuar conlos doce dispositivos con-troladores. Por medio deeste entorno se puedenenviar órdenes codifica-
das hacia el módulo decontrol para realizardiversas tareas. De igualmanera, existe informa-ción que proviene del dis-positivo controlador ypuede ser monitoreadapor el usuario en estemismo sistema (véasefigura 14).
Por el momento REM-LED no es totalmenteautónomo, ya que la loco-moción es generada por elcomputador externo porlo que requiere de un busde datos que permita lacomunicación entre éste ylos dispositivos controlado-res. Además existen doscables adicionales que lle-van las señales de alimen-tación para los módulos decontrol y potencia respec-tivamente. La figura 15muestra el sistema finalensamblado.
PERSPECTIVAS DE TRABAJO
Se pretende que la plata-forma desarrollada permitaestablecer nuevas áreas detrabajo, centradas en:
44 ››
Una vez que el bus dadatos ha sido ocupadopor algún dispositivo, elcomputador centralenvía otra palabra deocho bits que contieneel código del asunto atratar, tales como confi-guración de la velocidadde referencia, velocidadsensada, etc.
Fig 13. Esquema de inicio de comunicación
Fig 12. Arquitectura física de REMLED

• Desarrollo e implemen-tación de sensores vir-tuales sobre el robot, através del uso de redesneuronales artificiales,lógica difusa entreotras.
• Estudio de modos decaminar libre en robotscaminantes que permi-tan dotarle de unamayor autonomía en lamovilidad de la máquina.
• Estudio de nuevas confi-
guraciones para la loco-moción del robot quepermitan elevar losniveles de eficienciaenergética.
• Incremento en la capa-cidad de autonomía deprocesamiento median-te la implementación decomputadoras de bolsi-llo y la implementaciónde nuevos sistemas ope-rativos en tiempo real.
CONCLUSIONES
Se implementó una pla-taforma móvil de bajocosto, basada en un robotcaminante cuadrúpedo. Lasimetría del sistema permi-te gran onmidireccionali-dad del robot, facilitandosu desplazamiento porterrenos irregulares.
Las características de losactuadores seleccionadoshan dotado al robot deuna gran eficiencia ener-gética, brindándole mayorautonomía.
Se ha diseñado un con-trolador electrónico flexi-ble que permite obtener yconfigurar parámetros entiempo real, a través demicrocontroladores debajo costo.
Se han realizado prue-bas iniciales de locomociónque han posibilitado defi-nir las configuraciones delas patas que permiten unmenor gasto energéticodurante el proceso decaminata.
Se expone el uso deherramientas de softwarelibre, como la libreríaModélica como alternati-va de bajo costo para eldesarrollo de simulacionesfísicas.
Bibliografía
• Calle Ortiz Eduardo.Estudio de la cinemática
45››
Las características delos actuadores selecciona-dos han dotado al robot deuna gran eficiencia energé-tica, brindándole mayorautonomía.
Fig 14. Programa informático para la administración del sistema
Fig 15. Ensamble final de REMLED
e implementación de unsensor virtual sobre lapata del robot SILO 6,Tesis de Maestría,Universidad Politécnicade Madrid, 2004.
• Gálvez, J.A., Estremera,J.,Gonzalez de Santos, P.SILO4: a versatile qua-druped robot for rese-arch in force distribution,In Proceedings of the 3rd
International Conferenceon Climbing and WalkingRobots and the SupportTechnologies for MobileMachines, Madrid, 2000.
• González de Santos, P.,García, E., Estremera, J.,
Armada M.A. Silo6:desing and configurationof a legged robot forhumanitarian demining,In proceedings of theIARP Workshop onRobots forHumanitarian Demining2002, Vienna, 2002.
• Hirose, S. and Kato, K.Quadruped walkingrobot to perform minedetection and removaltask, In Proceedings ofthe fist InternationalConference on Climbingand Walking Robots,Brussels, 1998.
• Keisuke Arikawa, Shigeo
Hirose. Development ofQuadruped WalkingRobot TITAN-VIII, Proc.IROS 96, Osaka, 1996.
• Kenzo Nonami.Autonomous mine detec-tion robot for humanita-rian demining, Dept. ofElectronics andMechanical Engineering,Chiba University.
• Kimura,H. Tsuchiya, K.Ishiguro, A. Witte, H.Adaptive Motion ofAnimals and Machines,Hirakawa Kogyosha,Japan: Springer Tokio,2006.
46 ››