reconstrucciÓn de objetos de forma libre a partir de ... · reconstrucciÓn de objetos de forma...
TRANSCRIPT
RECONSTRUCCIOacuteN DE OBJETOS DE FORMA LIBRE A PARTIR DE IMAacuteGENES DE RANGO EMPLEANDO UNA RED DE PARCHES
NURBS
John Willian Branch Bedoya MSe
Tesis de grado presentada como requisito parcial para optar al tiacutetulo de Doctor en Ingenieriacutea - Sistemas
Director Prof Flavio Prieto Ortiz PhD
Co-Director Prof Pierre Boulanger PhD
Universidad Nacional de Colombia - Sede Medelliacuten Facultad de Minas
Programa de Doctorado en Ingenieriacutea - Sistemas
Medelliacuteu Colombia 2007
RECONSTRUCCIOacuteN DE OBJETOS DE FORMA LIBRE A PARTIR DE IMAacuteGENES DE RANGO EMPLEANDO UNA RED DE PARCHES
NURBS
John Willian Brandl Bedoya ~lSc
Comiteacute Doctoral
1ProL Ro bert 130b Fisher PhD University of Edinburgh Edinburgh UK
ProL Humberto Loaiza Correa PhD Universidad del Vall e Cedi Colombia
ProL Joseacute Gildardo Osario Gallego PhD Universielael Nacional ele Colombia - Seelc YIeelelliacuten Meelelliacuten Colombia
PraL Pierre Boulanger PhD University of Alberta Alberta Canada
Prof Flavio Prieto Ortiz PhD Universidad Nacional de Colombia - Sede t Ianizales Manizales Colombia
Universidad Nacional de Colombia - Sede ~Iedelliacuten 2 Facultad de Minas
Programa ele Doctoraelo en Ingenieriacutea - Sistemas
TvIeclelliacuten Colombia 2007
Tabla de
l1 Motiveacute1cioacuten
l2
13
14 Objetivos
141
14 2
15
16
21
22
21
E OBJETOS DE FORMA LIBRE A PARTIR DE reo EMPLEANDO UNA RED DE PAHCHES
NURBS
nn Vl illian Branch Bedoya ~middotI Sc
Tabla de Contenido
1 INTRODUCCIOacuteN 1
11 Motivacioacuten 2
12 Planteamiento elel Problema 2
13 Trabajos Previos 3
14 Obj etivos )
f)14 1 General
142 Especiacuteficos fi
15 Con tr ibuciones (iexcl
16 Organizacioacuten 7
2 RECONSTRUCCIOacuteN DE OBJETOS A PARTIR DE IMAacuteGENES DE RANGO FUNDAMENTOS 9
21 Irn tgc l1ci dc n ango lO
22 Obj etos ue Forma Libre 11
23 Aplic(tciol1cs 11
2J 1 Ingenieriacutea inversa H
2J2 Inspecc ioacuten 11
2JJ Piezas rnuscables 14
234 Medicina lS
24 Adquisicioacuten L
25 Registro 17 432 Anaacutelisis del hueco
26 Integracioacuten j)
433 Llenado del hueco
27 Ajuste de Superficies 26 44 Rcsul tados
45 3 REGISTRO DE IMAacuteGENES DE RANGO PARCIALMENTE SOLAPAshy
DAS EMPLEANDO ALGORITMOS GENEacuteTICOS 35 5
31 Intruduccioacuten 51
32 Algoritmo ICP (Itemtive Clospts Point) 52
321 Taxonomiacutea de las variantes del algoritmo ICP )~) I
5
33 Meacutetodo de Correspondencia de Imaacutegenes de Rango Empleando un Algoritmo Geneacutetico (ICP+AG)
331 Pre-alincamiento y obtencioacuten del aacutereil ele solapamiento
332 MuesLreo de puntos
333 Determinacioacuten de subdominios
334 Optimizacioacuten de la currespondcncia mediante AG
34 Resultados
35 Conclusiones
~u
J J
middotmiddot15
1)
02
53
54
55
5
5
5
5
6 RES
4 LLENADO DE HUECOS EN MALLAS TRIANGULARES EMPLEANshyDO FUNCIONES DE BASE RADIAL 65 7 CO
41 Introd1lccioacuten (iriexcl
42 Funciones de Base Radial ti7
43 Llenado de Huecos 72
431 Identificacioacuten del hucco -) ( )
II
17 432 Anaacutelisis del hueco 70 ))
433 Llenado del hueco 81
2(iacute -plusmn-plusmn Rcsultados
45 Conclusiones 07 ~ENES DE RANGO PARCIALMENTE SOLAPAshyLGORITMOS GENEacuteTTiacuter~ 35
5 AJUSTE DE SUPERFICIES MEDIANTE PARCHES NURBS 99 J ]
51 Introduccioacutell
52 Tcoriacutea de iexcldorse lUO
521 Teoriacutea de )1orse para mallas triangulares
m Algoritmo 522 El complejo ~1orse-Smale ~U
53 v1rtodo de Ajuste de Superficies Mediante Parches NURBS Optimizados lU7 11
531 Cuadrilaterizacioacuten ele la malla triangular 109
f 532 Regularizacioacuten de la malla cuadrilateral llt)
U) 533 Ajllste por parches NURBS optimizados 117
JI) ) shy54 Resultados 1~ I
b~ l) Conclusiones
Cl2
6 RESULTADOS 131
EAN- 65 7 CONCLUSIONES 139
(iacute )
tiT
~ ) (
- )
( )
111
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

RECONSTRUCCIOacuteN DE OBJETOS DE FORMA LIBRE A PARTIR DE IMAacuteGENES DE RANGO EMPLEANDO UNA RED DE PARCHES
NURBS
John Willian Brandl Bedoya ~lSc
Comiteacute Doctoral
1ProL Ro bert 130b Fisher PhD University of Edinburgh Edinburgh UK
ProL Humberto Loaiza Correa PhD Universidad del Vall e Cedi Colombia
ProL Joseacute Gildardo Osario Gallego PhD Universielael Nacional ele Colombia - Seelc YIeelelliacuten Meelelliacuten Colombia
PraL Pierre Boulanger PhD University of Alberta Alberta Canada
Prof Flavio Prieto Ortiz PhD Universidad Nacional de Colombia - Sede t Ianizales Manizales Colombia
Universidad Nacional de Colombia - Sede ~Iedelliacuten 2 Facultad de Minas
Programa ele Doctoraelo en Ingenieriacutea - Sistemas
TvIeclelliacuten Colombia 2007
Tabla de
l1 Motiveacute1cioacuten
l2
13
14 Objetivos
141
14 2
15
16
21
22
21
E OBJETOS DE FORMA LIBRE A PARTIR DE reo EMPLEANDO UNA RED DE PAHCHES
NURBS
nn Vl illian Branch Bedoya ~middotI Sc
Tabla de Contenido
1 INTRODUCCIOacuteN 1
11 Motivacioacuten 2
12 Planteamiento elel Problema 2
13 Trabajos Previos 3
14 Obj etivos )
f)14 1 General
142 Especiacuteficos fi
15 Con tr ibuciones (iexcl
16 Organizacioacuten 7
2 RECONSTRUCCIOacuteN DE OBJETOS A PARTIR DE IMAacuteGENES DE RANGO FUNDAMENTOS 9
21 Irn tgc l1ci dc n ango lO
22 Obj etos ue Forma Libre 11
23 Aplic(tciol1cs 11
2J 1 Ingenieriacutea inversa H
2J2 Inspecc ioacuten 11
2JJ Piezas rnuscables 14
234 Medicina lS
24 Adquisicioacuten L
25 Registro 17 432 Anaacutelisis del hueco
26 Integracioacuten j)
433 Llenado del hueco
27 Ajuste de Superficies 26 44 Rcsul tados
45 3 REGISTRO DE IMAacuteGENES DE RANGO PARCIALMENTE SOLAPAshy
DAS EMPLEANDO ALGORITMOS GENEacuteTICOS 35 5
31 Intruduccioacuten 51
32 Algoritmo ICP (Itemtive Clospts Point) 52
321 Taxonomiacutea de las variantes del algoritmo ICP )~) I
5
33 Meacutetodo de Correspondencia de Imaacutegenes de Rango Empleando un Algoritmo Geneacutetico (ICP+AG)
331 Pre-alincamiento y obtencioacuten del aacutereil ele solapamiento
332 MuesLreo de puntos
333 Determinacioacuten de subdominios
334 Optimizacioacuten de la currespondcncia mediante AG
34 Resultados
35 Conclusiones
~u
J J
middotmiddot15
1)
02
53
54
55
5
5
5
5
6 RES
4 LLENADO DE HUECOS EN MALLAS TRIANGULARES EMPLEANshyDO FUNCIONES DE BASE RADIAL 65 7 CO
41 Introd1lccioacuten (iriexcl
42 Funciones de Base Radial ti7
43 Llenado de Huecos 72
431 Identificacioacuten del hucco -) ( )
II
17 432 Anaacutelisis del hueco 70 ))
433 Llenado del hueco 81
2(iacute -plusmn-plusmn Rcsultados
45 Conclusiones 07 ~ENES DE RANGO PARCIALMENTE SOLAPAshyLGORITMOS GENEacuteTTiacuter~ 35
5 AJUSTE DE SUPERFICIES MEDIANTE PARCHES NURBS 99 J ]
51 Introduccioacutell
52 Tcoriacutea de iexcldorse lUO
521 Teoriacutea de )1orse para mallas triangulares
m Algoritmo 522 El complejo ~1orse-Smale ~U
53 v1rtodo de Ajuste de Superficies Mediante Parches NURBS Optimizados lU7 11
531 Cuadrilaterizacioacuten ele la malla triangular 109
f 532 Regularizacioacuten de la malla cuadrilateral llt)
U) 533 Ajllste por parches NURBS optimizados 117
JI) ) shy54 Resultados 1~ I
b~ l) Conclusiones
Cl2
6 RESULTADOS 131
EAN- 65 7 CONCLUSIONES 139
(iacute )
tiT
~ ) (
- )
( )
111
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

E OBJETOS DE FORMA LIBRE A PARTIR DE reo EMPLEANDO UNA RED DE PAHCHES
NURBS
nn Vl illian Branch Bedoya ~middotI Sc
Tabla de Contenido
1 INTRODUCCIOacuteN 1
11 Motivacioacuten 2
12 Planteamiento elel Problema 2
13 Trabajos Previos 3
14 Obj etivos )
f)14 1 General
142 Especiacuteficos fi
15 Con tr ibuciones (iexcl
16 Organizacioacuten 7
2 RECONSTRUCCIOacuteN DE OBJETOS A PARTIR DE IMAacuteGENES DE RANGO FUNDAMENTOS 9
21 Irn tgc l1ci dc n ango lO
22 Obj etos ue Forma Libre 11
23 Aplic(tciol1cs 11
2J 1 Ingenieriacutea inversa H
2J2 Inspecc ioacuten 11
2JJ Piezas rnuscables 14
234 Medicina lS
24 Adquisicioacuten L
25 Registro 17 432 Anaacutelisis del hueco
26 Integracioacuten j)
433 Llenado del hueco
27 Ajuste de Superficies 26 44 Rcsul tados
45 3 REGISTRO DE IMAacuteGENES DE RANGO PARCIALMENTE SOLAPAshy
DAS EMPLEANDO ALGORITMOS GENEacuteTICOS 35 5
31 Intruduccioacuten 51
32 Algoritmo ICP (Itemtive Clospts Point) 52
321 Taxonomiacutea de las variantes del algoritmo ICP )~) I
5
33 Meacutetodo de Correspondencia de Imaacutegenes de Rango Empleando un Algoritmo Geneacutetico (ICP+AG)
331 Pre-alincamiento y obtencioacuten del aacutereil ele solapamiento
332 MuesLreo de puntos
333 Determinacioacuten de subdominios
334 Optimizacioacuten de la currespondcncia mediante AG
34 Resultados
35 Conclusiones
~u
J J
middotmiddot15
1)
02
53
54
55
5
5
5
5
6 RES
4 LLENADO DE HUECOS EN MALLAS TRIANGULARES EMPLEANshyDO FUNCIONES DE BASE RADIAL 65 7 CO
41 Introd1lccioacuten (iriexcl
42 Funciones de Base Radial ti7
43 Llenado de Huecos 72
431 Identificacioacuten del hucco -) ( )
II
17 432 Anaacutelisis del hueco 70 ))
433 Llenado del hueco 81
2(iacute -plusmn-plusmn Rcsultados
45 Conclusiones 07 ~ENES DE RANGO PARCIALMENTE SOLAPAshyLGORITMOS GENEacuteTTiacuter~ 35
5 AJUSTE DE SUPERFICIES MEDIANTE PARCHES NURBS 99 J ]
51 Introduccioacutell
52 Tcoriacutea de iexcldorse lUO
521 Teoriacutea de )1orse para mallas triangulares
m Algoritmo 522 El complejo ~1orse-Smale ~U
53 v1rtodo de Ajuste de Superficies Mediante Parches NURBS Optimizados lU7 11
531 Cuadrilaterizacioacuten ele la malla triangular 109
f 532 Regularizacioacuten de la malla cuadrilateral llt)
U) 533 Ajllste por parches NURBS optimizados 117
JI) ) shy54 Resultados 1~ I
b~ l) Conclusiones
Cl2
6 RESULTADOS 131
EAN- 65 7 CONCLUSIONES 139
(iacute )
tiT
~ ) (
- )
( )
111
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
234 Medicina lS
24 Adquisicioacuten L
25 Registro 17 432 Anaacutelisis del hueco
26 Integracioacuten j)
433 Llenado del hueco
27 Ajuste de Superficies 26 44 Rcsul tados
45 3 REGISTRO DE IMAacuteGENES DE RANGO PARCIALMENTE SOLAPAshy
DAS EMPLEANDO ALGORITMOS GENEacuteTICOS 35 5
31 Intruduccioacuten 51
32 Algoritmo ICP (Itemtive Clospts Point) 52
321 Taxonomiacutea de las variantes del algoritmo ICP )~) I
5
33 Meacutetodo de Correspondencia de Imaacutegenes de Rango Empleando un Algoritmo Geneacutetico (ICP+AG)
331 Pre-alincamiento y obtencioacuten del aacutereil ele solapamiento
332 MuesLreo de puntos
333 Determinacioacuten de subdominios
334 Optimizacioacuten de la currespondcncia mediante AG
34 Resultados
35 Conclusiones
~u
J J
middotmiddot15
1)
02
53
54
55
5
5
5
5
6 RES
4 LLENADO DE HUECOS EN MALLAS TRIANGULARES EMPLEANshyDO FUNCIONES DE BASE RADIAL 65 7 CO
41 Introd1lccioacuten (iriexcl
42 Funciones de Base Radial ti7
43 Llenado de Huecos 72
431 Identificacioacuten del hucco -) ( )
II
17 432 Anaacutelisis del hueco 70 ))
433 Llenado del hueco 81
2(iacute -plusmn-plusmn Rcsultados
45 Conclusiones 07 ~ENES DE RANGO PARCIALMENTE SOLAPAshyLGORITMOS GENEacuteTTiacuter~ 35
5 AJUSTE DE SUPERFICIES MEDIANTE PARCHES NURBS 99 J ]
51 Introduccioacutell
52 Tcoriacutea de iexcldorse lUO
521 Teoriacutea de )1orse para mallas triangulares
m Algoritmo 522 El complejo ~1orse-Smale ~U
53 v1rtodo de Ajuste de Superficies Mediante Parches NURBS Optimizados lU7 11
531 Cuadrilaterizacioacuten ele la malla triangular 109
f 532 Regularizacioacuten de la malla cuadrilateral llt)
U) 533 Ajllste por parches NURBS optimizados 117
JI) ) shy54 Resultados 1~ I
b~ l) Conclusiones
Cl2
6 RESULTADOS 131
EAN- 65 7 CONCLUSIONES 139
(iacute )
tiT
~ ) (
- )
( )
111
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
17 432 Anaacutelisis del hueco 70 ))
433 Llenado del hueco 81
2(iacute -plusmn-plusmn Rcsultados
45 Conclusiones 07 ~ENES DE RANGO PARCIALMENTE SOLAPAshyLGORITMOS GENEacuteTTiacuter~ 35
5 AJUSTE DE SUPERFICIES MEDIANTE PARCHES NURBS 99 J ]
51 Introduccioacutell
52 Tcoriacutea de iexcldorse lUO
521 Teoriacutea de )1orse para mallas triangulares
m Algoritmo 522 El complejo ~1orse-Smale ~U
53 v1rtodo de Ajuste de Superficies Mediante Parches NURBS Optimizados lU7 11
531 Cuadrilaterizacioacuten ele la malla triangular 109
f 532 Regularizacioacuten de la malla cuadrilateral llt)
U) 533 Ajllste por parches NURBS optimizados 117
JI) ) shy54 Resultados 1~ I
b~ l) Conclusiones
Cl2
6 RESULTADOS 131
EAN- 65 7 CONCLUSIONES 139
(iacute )
tiT
~ ) (
- )
( )
111
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
Lista de Figuras
2 iexcl Pro(eso de recoulruccioacuten triuiHlclIsiollal 1U
22 Pruceo dc auquisicioacuten ue la imagcn ue rango para uos vistas diferentes ue un mismo objeto 12
23 Objetos de forma libre 13
24 Taxonomiacutea de los meacutetodos de adquisicioacuten de rango ac tivo lo
25 Triangulacioacuten oacuteptica 19
26 Registro de imaacutegenes de rango ~O
27 Anomaliacutea topoloacutegica sobre la superficie 23
28 Ajuste de superficies
31 Pre-alineamiento de imaacutegenes de rango 4b
32 Muestreo y seleccioacuten de puntos cercanos 47
I 33 Determinacioacuten de suhdominios en A(Imagen de referencia) para cada muestra
en 3 (Imagen a registrar) middotltl
J1 Esquema ue representacioacuten oe un nOIllosorna
rJ V Cruce con un solo punto ue (orLe JI
J6 Pruebas ue convcrgencia con un umoral ue x 10- 1 mm )middot1
J7 Prultoas ult convltrgltncIacutea con un umbral ue 1 x 10-6 lllm J5
J8 M uesLra oe imaacutegenes 1 a G y su cOlTesponuiltnte registro j(j
39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

39 Alinea mientos iniciales
310 Errores promedio (in mm ) de registro para cada uno de los aacute ngulos
311 Comparacioacutell entre los errores del meacutetodo del ICP+AG con ICP e ICP+N J17 Estimacioacutell ele los puntos por fuera de la supcrfici
312 Ajuste ele los datos a un modelo ele error Ciacute() 418 Triangulacioacuten del hueco
31 3 Proceso de regis tro completo para la rdaacutescara 4 19 Ejem plos ele ge neracioacuten de huecos sinteacuteticos de di
420 Comporteacutelll1iento del error promedio para el llena 41 FUllciolles de uase radial (iacute ~J
421 Llenado ele huecos en el conejo de Stanford 42 Problemas con el tamantildeo del raelio de soporte 71
422 Proceso completo para la correccioacuten 4 3 Tipos de huecos 71
-el21 Proceso (011 plfto para la cor 44 Triaacutengulo liacutemite 7r
45 Identificaci oacuten de tuecos en el conejo de Stanford 51 Configuracioacuten de los puntos
~ 52 Caacutelculo de los pesos para el 46 Idell it ificaci oacuten de huecos en la maacutescara ( (
53 Complejo de jIorse-Smale 47 Propiedades geomeacutetricas ele una curva 7-
middot5 -1 PUlltos criacutetiros a rrojados por 48 Plano osculador P 79
55 Punto crIacutetico arroj ados por 49 Aproximacioacuten de la curva de cOlltorno mediante curvas de Beacutezier y puntos sobre los cuales se estima la torsioacuten laquoJ 5 6 Cuadrilat(rizacioacuten mediante el
410 Medida de la variac ioacuten de leacutel torsioacutell de la curva del contoI110 en seis CClSOS 57 Cuaclrila te ri zacioacuten mediante el sinteacuteticos diferentes 82
58 Regula rizac ioacuten para un objeto 4 11 Medida de la variacioacuten de la torsioacuten de la curva del contorno en tres casos de
59 Individuo de la estrategia evolu huEcOS generados por el proceso de reconstruccioacuten en el conejo de Stanford
510 Optimizacioacuten de los puntos de 412 Medida de la variac ioacuten de la torsioacuten de la curva del contorno en tres casos de
huecos que pertenecen a la superficie de la maacutescara y del conejo de Stallford IU 511 Red de parches NURBS
413 Clasificacioacuten de los huecos identificados en el conejo de Stanforcl 512 Continuidad entre ejes
41-1 Clasificacioacuten de los huecos identificados ca la maacutescara 513 Continuidad ell los veacutertices
415 Iteraciones para la selecc ioacuten dE centros de interpolac ion 8) 514 Optimizacioacuten y unioacuten de los
J16 Generacioacuten de nuevos puntos 515 IlcConst rucc ioacuten de objeto abierto
6 1 R(const rucCioacuten ele obj eto cerrado
Gl n ccolltruccioacuten de oujcto cenado
s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

s
mm) de registro para cada uno de los aacutengulo
-3 errores del meacutetodo del ICP+AG con ICP e ICP
un modelo de error
mpleto para la lvIaacutescara
N
J (
( j()
hal
antildeo del radio de soporte
(iC)
71
middot1
puntos
n tres casos de de SLanford
tres casos de de Stanford
(i
7( I
7-
79
dJ
1)1
417 Esti lI1ac ioacuten de los puntos por fuera de la superficie S8
418 Triangulacioacuten del hueco 89
4 19 Ejemplos de generacioacuten de huecos sinteacuteticos ele diferentes tamantildeos 90
420 Comportamiento del error promedio para el llenado de los huecos sinteacuteticos JI
421 Llenado de huecos en el conejo de Stanford 93
422 Proceso completo para la correccioacuten de huecos 95
423 Pro((so completo para la correccioacuten de huccos
51 Configuracioacuten de los puntos criacuteticos lU2
52 Caacutelculo de los pesos para el Laplac iano 10middot1
53 Complejo de Morse-Smale 105
rSmiddotJ Plintos criacuteticos arrojados por llIorse para el objeto Pera 111
5 5 Puntos criacuteticos arrojados por [-lorse para el objeto Ioai 112
5 0 Cuadrilater izacioacuten mediante el complejo de NIorsr-Smale para el objeto Pera 114
5 7 Cuadrilaterizacioacuten mediante el com plejo de Morse-Smale para el objrto Moai 115
5 8 Regularizacioacuten para un objeto real de topologiacutea arbitaria
59 Individuo de la estrategia evolutiva 12U
5 10 Optimizacioacuten de los puntos de control de la superficie NURBS 123
51 1 Red de parches NU RBS
512 Continuidad entre ejes
j U CCJIlLinuidad CIl los veacuter t ices 1~(i
514 Oplimi ltac ioacuten y unioacuten de los parches URBS para un objeto real 120
515 Rcconstruccioacuten de objeto abierto empleando una red de parches NURBS
61 Reconstruccioacuten ele objeto cerrado empleando un a red de parches NURBS 134
Gl TIcconstruccioacuten de oLjcto ccnado empicando uneacutel red de parches N UTIuumlS l JS
Vil
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
62 Recoustruccioacuten del objeto Maacutescara mediante una red de parches NURBS 137
63 Reconstruccioacuten del objeto Foca mediante una red de parches NURBS 138
Lista
1
31
32
33
34
35
3G
37
41
42
43
44
45
46
51 I
I 111
61
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
)jeto TIaacutescara mediante una red de parches NUR13S 1 Ti
)jeto Foca mediante una red de parches NURBS lJt
Lista de Tablas
31 Cornportalniento ue error (en mm) para diferent es tarnauumlos ue los suLuominiosl)
32 Comportamiento ue tiempo (en seg) para uifcrclltes tamantildeos ue los suLuomishynios (en sfgundos) 49
33 Promedio de los resultados (mm) obtenidos para cada combinacioacuten de porcenshytajes asignados eacutel los operadores geneacuteticos iacute2
34 Valores de configuracioacuten del AG 12
35 Tiempo ele convergencia para 1 x 10-3 mm J-
))
3( Tiempo ele convergencia para 1 x l()-G mm j1
3 7 fesllltacos de los ajustes de curvas ni
41 Funciones de base radial tiacutepicamente usadas ti9
42 Funciones de base radial de soporte compacto de tipo polinoacutemico 71
43 Errores promedios del llenado de los huecos sinteacuteticos 91
44 Media y varianza de los errores promedios del llenado de los huecos sinteacuteticos 92
-15 Resultado de las etapas elel proceso para el objeto abierto 94
middot16 Resultado de las etapas del proceso para d objeto cerrado 94
51 ncsulllen de las pruebas de optimizacioacuten 122
61 Resultados obtenidos del proceso completo ele reconstruccioacuten U2
IX
Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

Lista de Algoritmos
31 Algoritmo ICP claacutesico J8
32 Meacutetodo propuesto para el registro ele imaacutegenes de rango parcialmente solapadas
empleando algoritmos gcneacuteticos
-k1 iIeacutetodo propuesto para la correcioacuten de huecos en mallas triangulares
~
4 iI~todo para la iclt-ntificacioacuten de huecos 75
Meacutetodo para anaacutelisis de huecos
MeacuteLodo para el llenado de hLl(COS 84
45 IvIeacutetodo de seleccioacuten de centros 86 46 jleacutetodo para la generacioacuten y triangulacioacuten de nuevos puntos
51 lleacutetuuo para el ajuste ue superficies rneuiante parches NURBS optimizadus 1m)
52 Meacutetodo para la cuadrilaterizacioacuten de la malla triangular llU
53 iVleacutetoelo de construccioacuten del camino de celdas MS lU
54 JI(~tou() para la regularizacioacuten ue la malla cuaurilateral 116
55 iIeacutetodo para la optimizacioacuten y continuidad de los parches NURBS 117
61 Rcconstrunioacuten de objetos de forma libre a partir de imaacutegenes de rango emshyphmuo Ullc reu ue parches NlIRDS 133
Xl
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
Capiacutetulo 1
INTRODUCCION
La reconstruccioacutell 3-D es el proceso mediante el cual objetos reales son reproducidos en la memoria de un computador manteniendo sus caracteriacutesticas fiacutesicas (dimellsiones volumen v forma)
El problema de la representacioacuten y reconstruccioacuten de formas tridimensionales ha recibido UlW
enorme atencioacuten en investigaciones de isioacuten en la uacuteltirna deacutecada El inte reacutes surge debido a que la teoriacutea de forma~ tiene aplicaciones en una amplia varieciad de campos a saber diseuumlo geomeacutetrico asistido por computador automatizacioacuten de manufactura mapeo de terrenos conduccioacuten de vehiacuteculos arqueologiacutea restauracioacuten de obras de arte vigilancia entre otros Pero ademaacutes de cualquier aplicacioacuten praacutectica el problema tiene mucho intereacutes matemaacutetico y cientiacutefico
Encontrar un meacutetodo uacutetil y general para una representacioacuten mecanizada de formas ha reshysultado ser un problema no trivial Los meacutetodos que usan especificacion es numeacutericas estaacuten usulttlmcnte limitados en cuanto a generalidad Estos son altamente precisos pero COll1unmenshyte estaacuten restringidos a un dominio especiacutefico La reconstruccioacuten de superficies es un prohlema importante en siacute mismo y con freClwncia es usado como una fase intermedia en el objetivo global de representacioacuten Y reconoci miento de objetos 3-D
La reconstruccioacuten se puede abordar desde el punto de vista de la interpolacioacuten o desde el punto de vista de la aproximacioacuten La interpolacioacuten exige que la superficie generada pase por todos los puntos pero si los datos contienen alguacuten tipo de ruido adherido durante el proceso de adquisicioacuten registro e integracioacuten es maacutes adecuada una superficie aproximada [ 101
Esta tesis estaacute enfocada a la representacioacuten de superficies de objetos de forma libre mediante aproximacioacuten para lo cual no se tiene ninguna informacioacuten a prwri de la superficie (como
1
Motivacioacuten
su forma u orientacioacuten) soacutelo las coordenadi
11 Motivacioacuten
Con el incremento en la resolucioacuten de los d ducido por es tos es cada vez maacutes complej ( moddo Ya que un objcto tridimensional 1
vista se hace nCcesario el escaneo de dichos usando un meacutetodo de registro introduciend con todas estas vistas registradas de un mis y refiectancia que pueden causar huecos en to de la superficie Tambieacuten los datos esu debido a las limitaciones en el proceso fiacutesic( valores atiacutepicos o en form a de pequeuumlas desv superficie real De esta manera se requiere l
su pcrficie vaacutelido a partir de un conjunto de esencia les del modelo despueacutes del paso de Sl
Los meacutetodos de reconstruccioacuten 3-D son utili representacioacuten de superficie Desafortunada analiacuteticamente el rnoddo ya que soacutelo se uti cie CO TllO las lllallas 1 riangulares o los diagra funcion es illlpliacutecitas como lo son las funcionE res 011 la industria Por el contrario las suiexcl industria poseen el inconveniente de no se] complejas ya que para su renderizado es n tos Esto es complicado de obtener en mode desarrollo de meacutetodos robustos que den un eficientemente grandes cantidades de datos ~ a recollstruir
12 Planteamiento del Pr~
El cliscntildeo gcolll~trico asistido por computado por computado (CAJI) se usan en numeros
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
lVlotivacioacuten
c idos en la volull1en y
(ihido una e dehido a cr disentildeo terrenos tre otros
nunmellshyrohlema
su forma u orientacioacuten) soacutelo las coordenadas tridimensionales de los puntos
11 Motivacioacuten
Con el incremento en la resolucioacuten de los dispositivos de escaneo el conjunto de datos proshy~ ducido por estos es cada vez maacutes complejo alcanzando millones de puntos para un uacutenico modelo Ya que un objeto tridimensional no puede ser observado desde un solo punto de vista se hace necesario el escaneo de dichos ohjetos desde muacuteltiples vistas para combinarlas usando un meacutetodo de registro introduciendo anomaliacuteas en las regiones de interseccioacuten Auacuten con todas estas vistas regis tradas de un mismo objeto pueden existir problemas de oclusioacuten y reftectancia que pueden causar huecos en la reconstruccioacuten dejando un modelo incompleshyto de la superficie Tamhieacuten los datos escanc~ados estaacuten siempre contaminados con ruido debido a las limitaciones en el proceso fiacutesico de Illed icioacuten El mido puede presentaxse como valores atiacutepicos o en forma de pequentildeas desviaciolles de los punlos mues( reados a partir d( la superficie real De esta manera se requiere un pre-procesamiento para ohtener un modelo de sllperficic vaacutelido a partir de un conjunto dc medidas fiacutesi cas mantenicndo las caracteriacutesticas esenciales del modelo despueacutes del paso de suavizado
Los meacutetodos de reconstruccioacuten 3-D son utilizados para convertir una nube de puntos en una representacioacuten de superficie Desafortunadamente muchos de es tos meacutetodos no descr iben analiacuteticamente el modelo ya que soacutelo se utilizan representaciones que aproximan la superfishycie como las mallas triangulares o los diagramas de Voronoi Otras por el contrario utilizan funciolles impliacuteci tas corno lo son las funciones de base radial las cuales auacuten no son estaacutendashyres en la industria Por el contrario las superficies NURBS allnque son U11 estaacutendar en la industria poseen el inconveniente de no ser aptas para las representaciones de superficies objetivo
1 complejas ya que para su renderizado es necesario de una base cuadrada regular de punshytos Esto cs complicado de obtener en modelos complejos por lo tanto se hace nccesario el
desde el desarrollo d e meacutetodos robustos que den una descripcioacuten analiacutetica del objeto que manej en pas( por eficientemente grandes cantidades de datos y que preserven los detalles finos de la superficie proceso a reconstruir
deg1middot cdiantc
(corno 12 Planteamiento del Problema
El c1iscuacuteo gfollleacutetrico asistido por computador (CAD) y los sisten13s cieacute manufactura as istidos por computauor (CAll) se usan en llumerosas inuustrias para uisentildear y crear oojeLos fiacutesi cos
2
INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e

INTROD U CCIOacuteN
a partir de modelos di gita les Sin elllbargo el problema invCrso de inferir 1111lt c]csCfipeioacuteu digi ta l a partir de un objeto fiacutesico existen te ha recibido Illenos atencioacuten N os referimos (1
es t e problema C0 111 0 ingenieriacutea inversa Hay varias propiedades de un objeto 3-D que pueden ser recuperadas talcs como su forma color Y propiedades del material Esta tesis cubre el problem a de rec upera r la forma 3-D tambieacuten llamada reconstruccioacuten de la superficie La meta de la reconstruccioacuten de superficiE puede ser enunciada como sigue
Dado un conjunto ele puntos ele muestra X que se asume (staacutell sobre o cerca a una superficie d esconocida S crear un rnocldo ele superficie S que aproxime a S [57]
Esta tes is examina e l problenla de recons truccioacuten de superficies de mallera general consishyd erando algunas carac teriacutesticas accrca d C la muestra X y la superficie desconocida S En el problema de recons truccioacuten general que consideramos los puntos X puede ser ruidosos y no se asume niuguna estructura y ningllna infonllacioacutell adicional al intCrior de ellos Leacute superficie S puede tener un tipo topoloacutegico arbitrario incluyendo fronteras y puede contener caracteriacutesticas a rbitra rias de forma como pliegues y esquinas presentes en la superficie Ya que los puntos X pueclen provenir de un muestreo ruidoso no intentamos interpola rlos pero en su lugar encontraremos una sllpCrficie que los aproxime Claro estaacute un procedimiento elE reconstruccioacuten no puede ga rantizar que S se recupere exactamente va que soacutelo se daacute informa shycioacuten de i- a traveacutes de un conjunto de puntos fillitos La superficie reconstruida S debe t ener el mirno Lipo topoloacutegico que 8 y ser ell toda partes cercana a S En esta tes i evaluaremos el meacutetodo de reconstruccioacuten considerando casos donde la superficie S sea conocida y pucela compararse visual y cuantita tivamente con la reconstruccioacuten
13 Trabajos Previos
Una amplia gama de a lgoritmos para reconstruccioacuten de superficies han ido propuest os en la literatura recientemellte [3657] Estos meacutetodos se pueden diidir en dos categoriacuteus meacutetodos ele int erpolac ioacuten y meacutetodos de aproximacioacutell
Meacutetodos de interpolacioacuten
Esta dase de algoritmos tratan de obtener llna superficie interpolando lln conjunto e de elatos muestreados Estas aproximaciones son apropiadas para eonj untos de datos libres de ruido
Trabajos Previos
Diferentes aproximaciones han sido realizadas lac ioacutell de Dclaunay Eldesbruner y Iueke [44] pi un algoritmo basculo en formas alfa Est alg~ ell el r adio de la circunferencia va iacutea maacutes peq1 a lfa pESaclas fn los cuales pueden ser afr tadOll n() tUl ifu rIII(s
En t res di lllellsionC P d e triaacutengulos ba jo la cual la s uriginal
Amcnta muestran qUE la
Basados ell g(Ollle v(cindario ele cada
a lgoritlllo es muy r
Otras es tra tEgias de Bernardini r L al
pno (s ex t re Dda unay 130yer y 011 3-D a partir de illcrclllelltal basado cuanJo el moddo ti
Basados en la funci construye una supe Illuestreo Este al la superficie ClPscOl
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
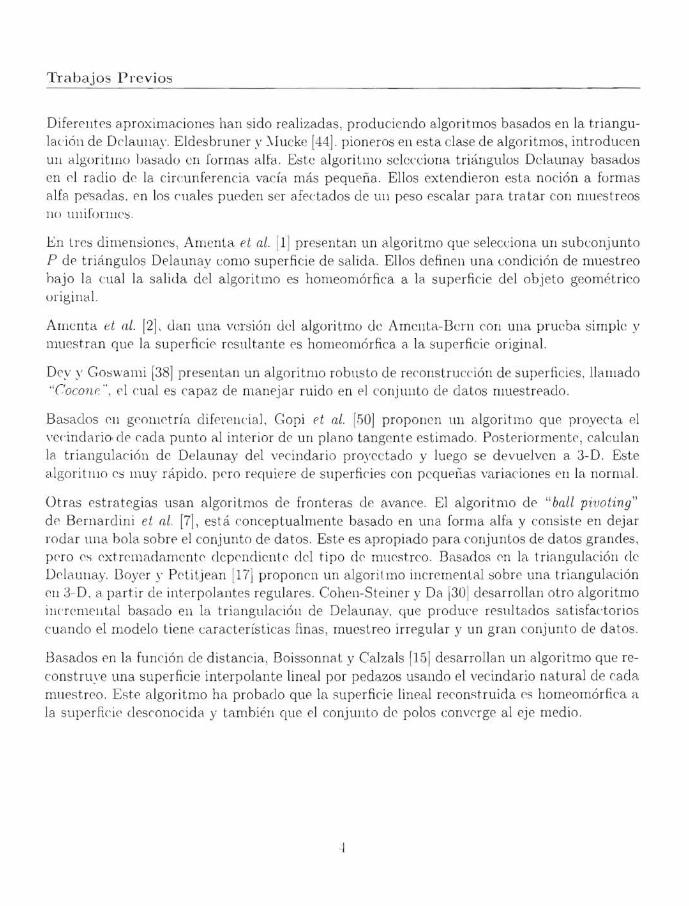
1 TTRODUCCIO N
0 el problema inverso ele inferir 111 18 cCscri pci oacuten nte ha recibido menos atencioacuten Nos referimos a Trabajos Previos varias propiedades de un objeto 3-D que pu Cdcn
or y propiedades del ma terial Esta tesis ( 1J hre (1 1bieacuten llamada reconstruccioacuten de la superficie La ede ser enunciada como sigue
lUes tra X que se asume estaacuten sohrc o CtHa T un modelo de superficie S que aproxime a
struccioacuten de superficies ele mallera gClcral Collsishy~ la mues tra X y la superficie dcscollocida S Eu iexclle consideramos los puntos X puede scr ruidosos ~una informacmiddotiAn n l - 1 in te rior de ellos La
3 y puede contencr 1 la superficie Ya nterpolarlos pero procedimiento ck lo se daacute informashyda S de be tener iexclsis evaluaremos
nocida y pueda
opuestos en la oriacuteas meacutetodos
pnjunto F de ~tos libres de
Diferellt es aproximaciones ha n sido realizadas produciendo algoritmos basados en la triangushylacioacuten de Dclaunay Eldesbruner y Iucke [44] pioneros en esta clase de algoritmos introducen Ull a lgoritmo basado en formas a lfa Este algoritmo selecc iona triaacutengulos Dcla unay basados en d radio de la circunferencia vaciacutea maacutes pequentildea Ellos extendieron esta nocioacuten a form as alfa p eSaclas en los cuales pueden ser afectados de un peso escalar para tra tar con muest reos no ulliforllles
En lres dimensiones ArnenLa et al [l ] presentan un algoritmo que selecciona un subconjunto P de triaacutengulos Delaunay como superficie de salida Ellos definen una condicioacuten de muestreo hajo la cual la salida del algoritmo es homeomoacuterfica a la superficie del obj eto geomeacutetrico origimd
Arnenta et al [2] dan una versioacuten del a lgoritmo de Amenta-Bern con una prueba simple y muestran que la superficie resultante es homeomoacuterfica a la superfi cie original
D el y Goswami [38] presentan un algoritmo robusto de reconstrucc ioacuten de superficies llamado Coconr el cual es capaz de manejar ruido en el conjunto de datos muestreado
Basados ell gcolletrIacutea difereucial Gopi et al [10] proponen un a lgori tmo que proyecta el vecindario de cada punto a l interior de un plano tangente estimado Posteriormente calculan la triangulacioacuten de Delaunay del vecindario proyectado y luego se devuelven a 3-D Este algoritlllo es muy raacutepido pero requiere de superficies con pequellas variac iones en la normal
Otras estrat egias usan algoritmos de fronteras de avance El algoritmo de balL pivoting d E Bernardini et al [7] estaacute concep tualmente basado en una forma alfa y consiste en dejar rodar una bola sobre el conjunto de datos Este es apropiado para conjuntos de datos grandes p C ro Cs extremadam ente dependiente del tipo de muestreo Basados Cn la triangulacioacuten dc Dela unay Boyer y Pet itjean 117] proponen un algorilmo incremental sobre una triangulacioacuten ell 3-D a partir de interpolantes regulares Cohen-Steiner y Da [301 desarrollan otro algoritmo ilHrCmellta l beacutetSDdo en la triangulacioacuten de Dela unay que produce resultados satisfactorios cuando el modelo tiene caracteriacutesticas finas muestreo irregular y un gran conjunto de datos
Basados en la funcioacuten de distancia Boissonnat y Calzals [151 desarrollan un algoritmo que reshyconstruye una superficie interpolante lineal por pedazos usando el vecindario natural de cada muestreo Este algoritmo ha probado que la superficie lineal reconstruida es homeornoacuterfiea eacutel
la superficie d esconocida y tambieacuten que el conjunto de polos converge al eje medio
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e
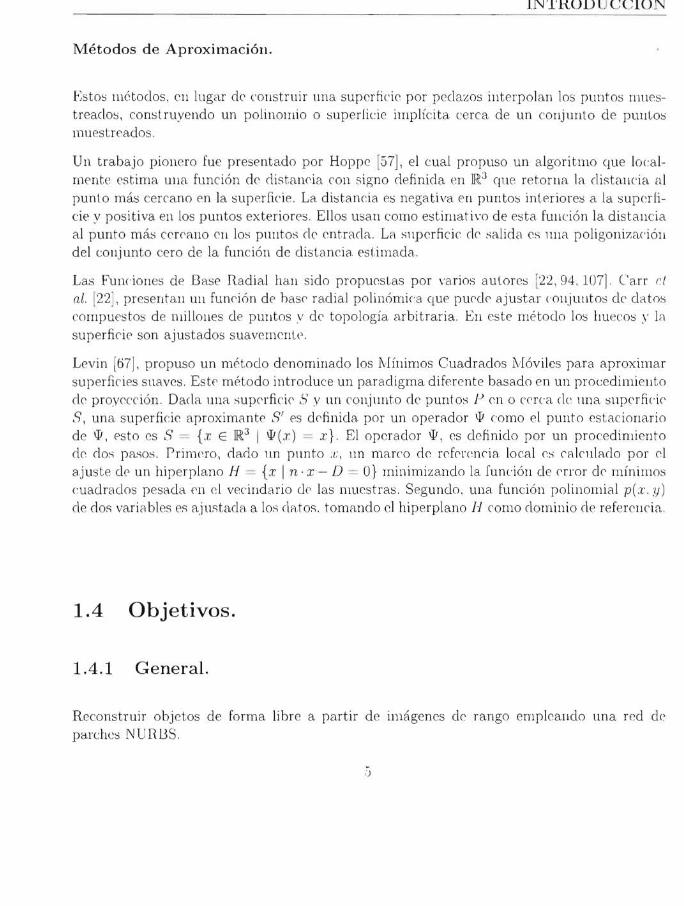
INTRODUCCIOacuteN
1 (olocar a punto un m todo para Cnfocado en el problema de la C lllplcando solapadas
) Diseuar un
permita ell d e hase radial
l Validar la
obietus de forma liL tria ugula res (OIUO
Las cOlltri buciorl(S
bull Un meacutetodu scrn
nes de ra ngo a orienta al prohle los a tra(~s de
solapadas Este suprrponga COI1 n dll(ir el clJac
triangulares En lIacutelllitCs quC dC
Meacutetodos de Aproximacioacuten Contribuciones
Estos meacutetodos e11 1ugar de construir una superficie por pedazos interpolan los puntos rnuesshytreaclos construyendo un polinomio o superlicie impliacutecita cerca de un conjunto de puntos 142 Especiacuteficos muestreados
Un trabajo pionero fue presentado por Hoppe [57] el cual propuso un algoritmo que localshymente estima Ulla funcioacuten de distancia con sipno definida en IRJ que retoma la clistallcia a l punto maacutes cercano en la superficie La distancia es negativa en puntos interiores a la superfi shyc ie y pos itiva en los puntos exteriores Ellos usan como estimativo de esta funcioacuten la dis tancia al punto maacutes cerCano ell los puntos de entrada La superficie dC salida es llna poligonizeacuteIcioacutelI del conjunto cero d e la func ioacuten de distancia estimada
Las Funciones d e Base Iladial hall sido propucsLas por varios aulores ~22 94107] (arr rI
al [22] presentan UlI funcioacuten d e hasC radial polinoacutemica que pl[(de ajustar cOlljUlltos de datos compues tos de millolles d e puntos v de topologiacutea arbitraria En este meacutetodo los huecos y 18 superficit son ajustados suavemenle
Levin [07] propuso un meacutetodo d enominado los rvIiacutenimos Cuadrados liIoacuteviles para aproximar superficies suaves Es te meacutetodo introduce un paradigma diftrente basado en un procedimiellto de proyeccioacuten Dada una supnficiC S v un conjunto de puntos F con o cCrca de una ~llperfici( 8 una superficie aproximante 8 es definida por un operador I]J como el punto estacionario de I]J esto es 8 = r E IR3 I I]J (r) = x El operador I]J es definido por un procedimiento ek dos paso~ Prinwro elado un punto 1 un marco ele rdCrcncia local c~ calclllado por el 15 Contrib ajuste de un hiper plano H = x Inmiddot x - D = O minimizando la funcioacuten de error dC miacutenimos cuadrados pesada en el vecinda rio de las muestras Segundo una funcioacuten polinomial p( r y)
El apor te gClwra l dede dos varieacutebles es ajustada a los elatos tomando el hiperplano H como dominio de referellcia
14 Objetivos
141 General
Reconstruir objetos de forma libre a partir de Imaacutegenes de rango empleando una red de parchcs NUnIJS
SjJlilll obrc In e