proyecto simulcon: simulador multifuncional para ...mplac/rf03/rf03.pdf · hasta el momento nos...
TRANSCRIPT

PROYECTO SIMULCON: Simulador Multifuncional para Formación de Conductores de Sistemas de Transporte Urbano.
Rosario Bayón, Alberto Martínez, Javier López, Miguel Torres. TECNATOM,S.A. Marta Pla, Silvia Rueda, Miguel A. Gamón, Rafael J. Martínez, Ignacio García. Instituto de Robótica. Universidad de Valencia Maria José Sospedra, Rafael García Ros. Instituto de Tráfico y Seguridad Vial (INTRAS). Universidad de Valencia
1 INTRODUCCION
El proyecto SIMULCON ( Simulador Multifuncional para la Conductores de vehículos de transporte ) ha sido parcialmente financiado por el MCYT dentro del PROFIT.
El proyecto está siendo desarrollado por Tecnatom como empresa líder, en colaboración con la Universidad de Valencia ( Instituto de Robótica e Instituto de Trafico y Seguridad Vial INTRAS ) y cuenta con el asesoriamiento de Ferrocarrils de la Generalitat Valenciana – Metro Valencia como especificador del producto y usuario final del mismo .
El objetivo del proyecto es la investigación y desarrollo tecnológico de nuevas soluciones que posibiliten la construcción y uso de un simulador de conducción con todas las opciones pedagógicas y a un coste adecuado a los operadores ferroviarios de no gran tamaño , particularmente a operadores de sistemas de transporte urbano ( sistemas de metro, metro ligero, tranviarios, trolebuses o autobuses guiados ) , que comparten parcialmente su plataforma de tránsito con el tráfico peatonal o vehicular ( plataformas no reservadas ).
El proyecto no solo cubre el aspecto tecnológico del simulador sino muy especialmente su carácter formativo, tanto para conductores noveles como para reciclaje y promociones, teniendo en cuenta los aspectos de evaluación y motivación formativa de alumnos.
2 ELEMENTOS SIMULADOR
El simulador esta formado por dos conjuntos de elementos
Elementos instruccionales: Hacen referencia a la especificación de requisitos , pruebas y material didáctico.
Elementos constructivos: Referente al software y hardware del simulador
2.1 ELEMENTOS INSTRUCCIONALES
Desde una perspectiva eminentemente instruccional, las tareas a realizar en el desarrollo del simulador de conducción de tranvía metro-ligero dirigido a la formación de conductores (SIMULCON) se estructuran en tres grandes fases:
1. Planificación: Análisis de tareas, determinación de conocimiento experto y alcance del diseño instruccional
2. Diseño y desarrollo instruccional e implementación informática 3. Implementación formativa y evaluación del diseño de instrucción
1

El siguiente dibujo muestra un esquema de las interrelaciones que existen entre las tres grandes fases destacadas. Hasta el momento nos hemos centrado en la fases relativas a la planificación y diseño instruccional, cuyas subactividades quedan desglosadas más abajo en el plan de actividades a desarrollar
Análisis necesidades y contexto instruccional
Análisis tarea Análisis conocimiento experto
GOMS Declarativo Procedimental
Estratégico
Diseño instrucción
Evaluación
Implementación
Instalación y mantenimiento
En la actual fase de desarrollo del proyecto el trabajo se ha centrado en determinar los requisitos instruccionales del sistema SIMULCON, con el objetivo de especificar las características y alcance del mismo, las tareas relevantes y procedimientos susceptibles de entrenamiento, así como los distintos tipos de conocimiento implicados en la operativa de la conducción del tranvía metro-ligero.
Esta fase del proyecto se desarrolló con una metodología eminentemente colaborativa, utilizando como técnicas de recogida de información la observación directa de la conducción de los tranvías en cabina de las unidades a simular, la realización de entrevistas con responsables de formación, con monitores y aprendices, así como el análisis de los documentos y materiales disponibles sobre contenidos y procedimientos implicados en la formación. En este área ha sido insustituible la aportación de FGV-Metro Valencia, que, como operadores de un sistema ferroviario, han indicado la problemática que se presenta en el día a día de la explotación del mismo, y han suministrado los datos para referenciar el modelo instruccional a las necesidades formativas reales.
2.2 ELEMENTOS TECNOLÓGICOS
Desde el punto de vista tecnológico el simulador incorporara los elementos HW y SW necesarios para cumplir los requerimientos de instrucción, siempre teniendo presente que la solución debe ser de bajo coste.
Los elementos del SMR pueden clasificarse en
Elementos Software o Sistemas operativos , Herramientas de desarrollo o Modelos de cabina o Modelo visual o Modelos de tráfico o Modelo dinámica del vehículo
Elementos Hardware o Ordenadores de cálculo o Sistema visual o Consola del instructor o Puesto de alumno o Interfase de paneles
2
3 REQUISITOS INSTRUCCIONALES
3.1 CARACTERÍSTICAS, PROPÓSITO Y HABILIDADES IMPLICADAS
Las habilidades implicadas en el entrenamiento a través de SIMULCON, quedan estructuradas en los siguientes niveles:
-Habilidades básicas de conducción (control/maniobras con unidad). Conjunto de habilidades requeridas para control de la unidad en su operación y tránsito normal, puesta en funcionamiento y desconexión de la misma y comprobación de su adecuación para salida a línea.
-Habilidades nivel táctico 1: Habilidades implicadas en el funcionamiento y comportamiento del tranvía en la conducción por la línea, así como familiarización con trazado, señalización y equipamiento de la plataforma tranviaria. En este bloque se incluyen las habilidades implicadas en las especificaciones generales de conducción (de parada, de salida de parada, de frenado y de tracción)
-Habilidades a nivel táctico 2: Habilidades implicadas en circulación con incidencias externas habituales, que exigen el reaccionar correctamente ante las mismas, anticipando los riesgos implicados y permaneciendo atento en todo momento en la conducción del vehículo. En este bloque se consideran las habilidades implicadas en la reacción ante incidentes con automóviles (giros prohibidos, rebasar semáforos en rojo, bloqueos de cruce, invasión y/o invasión de plataforma tranviaria, ...), peatones (cruces por lugares y/o momentos no habituales, ...) y/o obstáculos presentes en la plataforma tranviaria.
-Habilidades nivel estratégico: Práctica situaciones de elevado riesgo ante situaciones imprevistas no habituales y circulación con averías, y que serían imposibles de reproducir en un sistema real.
En los niveles táctico y estratégico tan bien se consideran en un lugar preeminente las practicas dirigidas a la adquisición y perfeccionamiento de los hábitos de circulación relacionados con la seguridad y confort del pasaje, la optimización del consumo energético, la mejora en la calidad del servicio ( frecuencias ) y la intensificación en el uso de los procedimientos de comunicación con el puesto de mando.
3.2 PRINCIPIOS INSTRUCCIONALES
Entre los principios instruccionales básicos considerados en el desarrollo de SIMULCON, podemos destacar:
a) Nivel de representación
Representación realista del entorno de conducción metro-metro ligero-tranvía utilizando técnicas informáticas en tiempo real. El entorno incluye los elementos: Equipos 3800 (equipo tractor y remolque específicos de Metro-Valencia), viario modificado línea 4 (incorporando plataforma compartida, enclavamiento y túnel no presentes en trazado real, pero que se han incluido a propuesta de FGV a fin de enriquecer los posibles escenarios de entrenamiento), circulación (normativa y comunicación) y variables entorno..
b) Fidelidad
Se enfatiza la fidelidad física de la cabina y de la respuesta de los dispositivos de la misma, la respuesta del sistema en tiempo real, así como la fidelidad procedural y situacional.
c) Secuencia instruccional
Tal como se destacó en el apartado precedente, se considera el entrenamiento en habilidades básicas (maniobrabilidad) y complejas de conducción (táctico y estratégico), discriminando entre situaciones, tomando decisiones, aplicando procedimientos y efectuando un control dinámico de las situaciones de entrenamiento. La secuencia instruccional propuesta considera las siguientes dimensiones en la ordenación de las prácticas de entrenamiento: Simple-complejo, general-específico, incremento diversidad y funcionamiento adecuado-malfunciones.
3
d) Interacción
Respuesta a las acciones del aprendiz (a) proporcionando respuestas naturales del sistema a la manipulación que éste efectúa, (b) minimizando las restricciones al estudiante y facilitando plena libertad en toma de decisiones y pautas de actuación.
e) Evaluación nivel adquisición-ejecución
Tal como se comentó con anterioridad (a)se proporciona un sistema de evaluación automatizado, (b) se incluye un feed-back natural durante el desarrollo de las simulaciones, y (c) se incluye capacidad del simulador para el registro de las actuaciones de los aprendices ante situaciones de entrenamiento para discusión posterior, o bien de la actuación de un experto para demostración y modelado comportamental.
f) Puesto de instructor
Se ha realizado un desarrollo específico del mismo, que permite seleccionar prácticas preespecificadas en programa de entrenamiento estándar (ejercicios predefinidos ), modificar la secuencia instruccional preespecificada con interacciones directas del instructor a lo largo de la sesión, configurar y almacenar nuevas situaciones de entrenamiento a voluntad del instructor, detección errores en la ejecución de las prácticas y reproducción de las mismas.
El puesto del instructor visualiza la situación de enseñanza en tiempo real (“ver lo que ve el aprendiz”) y ofrece un entorno gráfico para introducir modificaciones/malfunciones tanto en el circuito como en las condiciones de conducción.
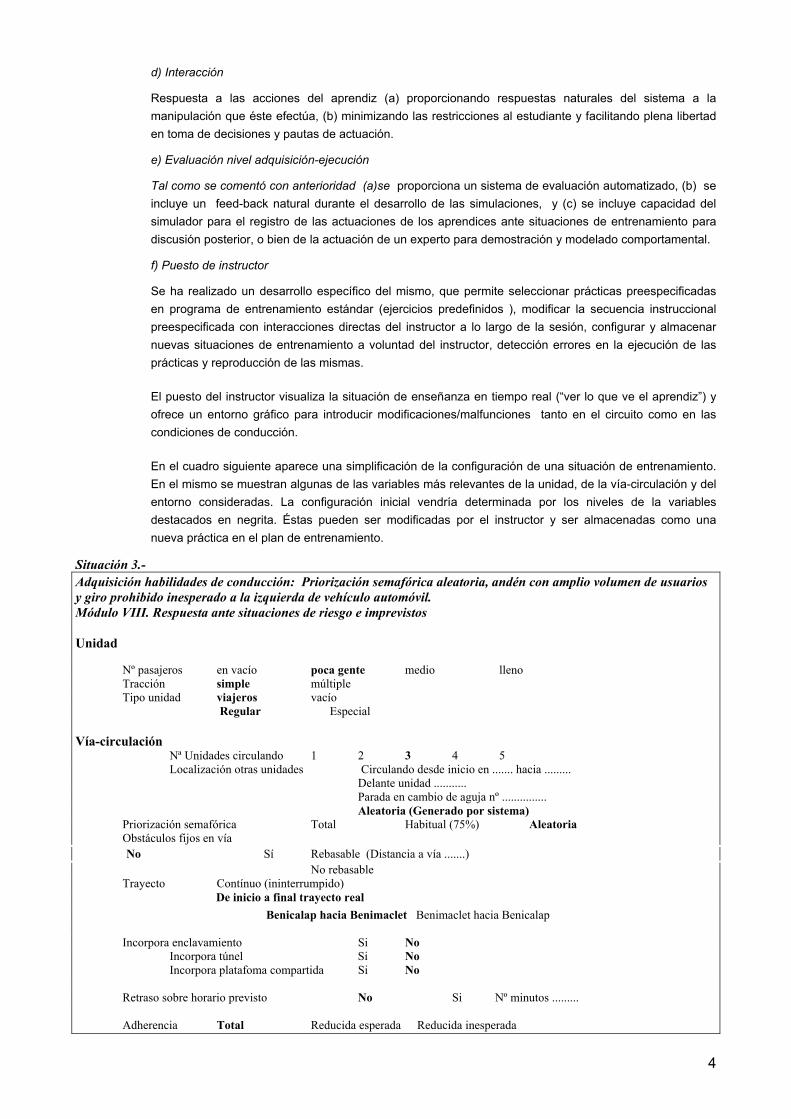
En el cuadro siguiente aparece una simplificación de la configuración de una situación de entrenamiento. En el mismo se muestran algunas de las variables más relevantes de la unidad, de la vía-circulación y del entorno consideradas. La configuración inicial vendría determinada por los niveles de la variables destacados en negrita. Éstas pueden ser modificadas por el instructor y ser almacenadas como una nueva práctica en el plan de entrenamiento.
Situación 3.- Adquisición habilidades de conducción: Priorización semafórica aleatoria, andén con amplio volumen de usuarios y giro prohibido inesperado a la izquierda de vehículo automóvil. Módulo VIII. Respuesta ante situaciones de riesgo e imprevistos Unidad
Nº pasajeros en vacío poca gente medio lleno Tracción simple múltiple Tipo unidad viajeros vacío Regular Especial Vía-circulación Nª Unidades circulando 1 2 3 4 5 Localización otras unidades Circulando desde inicio en ....... hacia ......... Delante unidad ........... Parada en cambio de aguja nº ............... Aleatoria (Generado por sistema)
Priorización semafórica Total Habitual (75%) Aleatoria Obstáculos fijos en vía
No Sí Rebasable (Distancia a vía .......) No rebasable
Trayecto Contínuo (ininterrumpido) De inicio a final trayecto real
Benicalap hacia Benimaclet Benimaclet hacia Benicalap Incorpora enclavamiento Si No Incorpora túnel Si No Incorpora platafoma compartida Si No
Retraso sobre horario previsto No Si Nº minutos .........
Adherencia Total Reducida esperada Reducida inesperada
4

ENTORNO
Densidad de tráfico rodado baja media alta Momento del día Diurno Atardecer Nocturno Factores atmosféricos Lluvia Si No Grado 0-10 Niebla Si No Grado 0-10 Iluminación vía adecuada insuficiente Usuarios en andén Escasos Medio Lleno (Benimaclet/Pont Fusta) Otros vehículos No Sí Tipo vehículo Automóvil Vehículos especiales Ambulancia Motocicleta Bomberos Bicicleta Policía Autobús Camioneta Características vehículos Color Blanco Rojo Azul Negro Luces Encendidas Apagadas
Trayectoria vehículo Cruce (salto semáforo) ............... Cruce sobre plataforma pk ......... Giro incorrecto Cruce calle Alboraya Circulando sobre plataforma ........... Invasión parcial de plataforma de pk ... a pk ..... En plataforma compartida (delante unidad)
Otros usuarios entorno No Sí nª 1 Comportamiento Correcto
Por paso de peatones En cruce Primado Reig
Por acera aneja a plataforma
g) Otros elementos formativos :
-Sistemas coaching. Pese a la incorporación de guías para el desarrollo de cada práctica específica, el material didáctico se plantea fundamentalmente a través de material off-line dirigido al aprendiz, briefing-debriefing pre-post actividad.
-Sistemas de feedback. Ante tareas dinámicas continuas complejas los mejores resultados se obtienen permitiendo al sujeto que obtenga feed-back en el momento que lo considere pertinente. Sin embargo, tras reuniones del equipo de trabajo, se acordó que el alcance y los requisitos del sistema primen el feed-back natural.
-Mensajes. Información verbal/gráfica sobre prácticas que se proporcionará fundamentalmente off-line. Se incorporan mensajes y cuestiones cerradas ante decisiones en resolución de averías cuando éstas se resuelven fuera de la unidad y, por tanto, exceden el alcance de la simulación.
-Modos de utilización. Se consideran tres modos de utilización complementarios: (1) secuencia instruccional lineal a través preespecificación situaciones entrenamiento –plan de entrenamiento estándar-, (2) secuencia instruccional en que instructor y aprendiz definen las prácticas, (3) secuencia definida exclusivamente por el instructor
-Instrucción adaptativa. Se considera una individualización de la enseñanza a través interacción monitor-aprendiz considerando los resultados de evaluación de cada ejercicio.
4 ELEMENTOS CONSTRUCTIVOS
A continuación se describen los principales elementos constructivos software del SIMULCON.
5

4.1 SISTEMA VISUAL
La información que se representa al usuario comprende por un lado la visualización de un modelo de tranvía en la posición exacta en la que se encuentra (datos que obtiene del módulo dinámico ), y por otro lado la visualización del escenario por el que se va a circular (modelado a partir de un tramo de trazado real del tranvía de Valencia, más algunos elementos añadidos no reales ). Se ha hecho especial hincapié en que el sistema visual proporcione el campo de visión real que tienen los conductores tranviarios, lo que supone la introducción de varios canales para permitir la visión lateral y la de los espejos retrovisores. Este sistema también gestiona el comportamiento del tráfico coexistente con el tranvía y representa visualmente estos vehículos o peatones. Al mismo tiempo es tarea de este módulo la gestión de las situaciones concretas en las que el conductor del tranvía se verá involucrado a lo largo de todo el recorrido que realice, controlando tanto vehículos y peatones como semáforos, de tal manera que su comportamiento se ajuste al que el conductor percibe en el entorno real, tarea para la cual deberá introducir, visualizar y controlar todos aquellos elementos ‘decorativos’ que permitan que dicha percepción sea lo más realista posible. [Hoekstra97].
Este sistema está compuesto por diferentes subsistemas o gestores, encargados cada uno de ellos de llevar a cabo y controlar un aspecto diferente relacionado con la información visual o auditiva que recibe el usuario del simulador. Estos son:
Gestor de Sonido.
Gestor de la escena 3D.
Gestor de Tráfico.
Gestor de Situaciones.
4.1.1 Gestor de Sonido
La tarea del gestor de sonido es la de activar y desactivar los diferentes sonidos que percibirá el usuario del simulador, tanto los intrínsecos al tranvía, como los del resto de elementos externos que intervienen en el desarrollo de la simulación. Para generar el sonido del tranvía al circular (forma, volumen y frecuencia) se obtiene del módulo dinámico el estado de los motores, la velocidad del tranvía y se calcula el rozamiento que las ruedas producen con las vías al circular sobre ellas.
Para poder incluir el sonido que producen los demás vehículos, del gestor de tráfico necesitará la posición y velocidad de los vehículos próximos, es decir aquellos que se encuentren lo suficientemente cerca como para ser percibidos desde el puesto del conductor.
6

Por último, el gestor de sonido también se encargará de añadir y controlar los sonidos típicos de cualquier entorno urbano que ayudarán a percibir el escenario de la ciudad con mayor fidelidad (ruido de fondo).
En cualquier caso, es importante que todos los sonidos guarden consonancia con la información visual que el usuario conductor percibe en cada instante para que no aparezcan efectos desorientadores.
4.1.2 Gestor de la escena 3D
Es el encargado de presentar al usuario toda la información visual que se produce en todo el sistema. Por un lado se tendrá que visualizar el recorrido o tramo de vía por el que circula el tranvía. Éste ha sido modelado a partir de un tramo de trazado real del tranvía de Valencia situado entre las paradas de Benicalap y Primado Reig, con pequeñas alteraciones para introducir otros elementos interesantes para la tarea de aprendizaje del conductor que no aparecen en este tramo. Pero el entorno no incluye sólo el viario completo, recorrido por el que se circula, sino también los tramos adyacentes de vías, los semáforos para el tranvía y los del resto de vehículos, las paradas del tranvía y todos aquellos elementos, tales como el mobiliario urbano, paradas de autobús, etc, que se encuentran dentro de este recorrido.
Todos los elementos 3D que se introducen en la escena se modelan con herramientas desarrolladas por el Instituto de Robótica y emplean texturas fotográficas para conseguir resultados realistas con bajo coste computacional de visualización. [Bayarri97].
En lo que se refiere a la realización del trazado del viario, no es sólo importante su visualización como un objeto más dentro de la escena, sino que también hay que tener en cuenta la información que de la descripción del mismo se pueda obtener, para que tanto el subsistema de Gestión del Tráfico como el módulo dinámico puedan obtener la posición exacta del tranvía sobre el mismo de forma sencilla. Por esta razón, la técnica empleada para describir los elementos que componen el trazado de la vía del tranvía y de las de circulación del resto de vehículos, sigue una metodología basada en un modelado paramétrico [Shah 95], en la que cada entidad es definida por varios parámetros variables que describen sus propiedades geométricas y por tanto permite utilizar directamente las especificaciones estándar que utilizan los ingenieros al diseñar las carreteras.
La descripción paramétrica de la vía se basa en la descomposición de la información en dos niveles distintos, por un lado la descripción del eje de la vía, definido a su vez a partir de la planta, el perfil y el peralte, y por otro lado la descripción de la sección transversal [Pareja99].
El modelado del viario se realiza también a partir de una herramienta desarrollada en el Instituto de Robótica denominada ArtGraph [Coma98], [Coma01], a la que se le han introducido las modificaciones necesarias para incluir los elementos propios del viario de un tranvía tales como la sección con raíles o la inclusión de la catenaria que sujeta el cableado eléctrico necesario para la circulación del mismo. Esta herramienta es capaz de generar una descripción poligonal de la vía adecuada para su correcta visualización en Tiempo Real asociada a la descripción paramétrica de la misma.
4.1.3 Gestor de Tráfico
Este modelo necesita de la información del viario para poder dirigir los vehículos que coexisten y pueden interferir con el tranvía. El trazado sirve como base para generar los carriles por los que los vehículos van a circular y su comportamiento está regido por un modelo mental del comportamiento del conductor de automóvil autónomo,basado en la división de la tarea de conducción en tres niveles principales de acción: estratégico, táctico y operacional. La programación de cada uno de los niveles es independiente del resto y se mantiene una encapsulación, lo que permite una gran flexibilidad, ya que un mismo escenario de conducción permite compatibilizar distintas técnicas de simulación de razonamiento [Wolfferlaar96][Schikore00][Fernández99].
7

4.1.4 Gestor de Situaciones
El diseño de los escenarios por los que el conductor del tranvía pasa a lo largo de todo el recorrido se basa en la inclusión en determinados puntos del trayecto de diferentes situaciones tipo: cruce de vehículos o peatones, aparición de obstáculos, etc. [Coma01]. Ésta inclusión puede ser predefinida, especificada en una serie de ejercicios por los que el conductor irá pasando para realizar el aprendizaje o mejorar sus habilidades, o producirse de forma externa bajo indicación del instructor.
Existen situaciones que están relacionadas con el subsistema gestor del tráfico, por lo que se tiene que determinar de qué modo éstas interactúan entre sí. Por ejemplo, en el caso de que el gestor de situaciones reciba un evento externo que indique que debe cruzarse un coche en la próxima intersección, el gestor del tráfico deberá introducir un coche en ese punto para que realmente se cruce en el trayecto del tranvía en el momento indicado.
La inclusión de estas situaciones tiene como objeto evaluar el comportamiento o la reacción del conductor. Para ello, este gestor toma una serie de medidas sobre variables que determinan en que grado el comportamiento del conductor ante una situación ha sido o no 'correcto'. En función de los rangos y el valor de las variables, el subsistema de evaluación proporciona un informe que sirve como base para que el instructor explique los resultados al conductor.
4.2 MÓDULO DINÁMICO
Uno de los procesos necesarios durante la ejecución de la simulación es la obtención del comportamiento del tranvía desde el punto de vista físico. Una buena simulación de las propiedades físicas (aceleraciones, inercias, etc.) es fundamental para que el comportamiento del simulador sea fiel a la realidad.
Modelo dinámico
Cabina Datos
Eventos
Información visual
Mandos Indicadores
Sist. E/S
Mandos Indicadores
Eventos conductor
Gestor de eventos externos y averías
Modelos lógicos
Modelo de Representación
Eventos
Información visual
El Módulo Dinámico del simulador es el sistema encargado de determinar el comportamiento físico del tranvía a partir de las entradas de los sistemas de frenado y de potencia, y de los datos del sistema visual. A cada instante de la simulación, determina las posiciones, velocidades y aceleraciones de los diferentes elementos del tranvía, proporcionando la información necesaria para el resto de sistemas del simulador, como los sistemas visual y lógico, y para la realimentación del propio Modelo Dinámico.
El Módulo Dinámico del simulador consta de los siguientes subsistemas: el módulo de trazado, el módulo de colisiones, el módulo de integración y el módulo de comunicaciones. Además, incorpora un gestor de
8

tiempo dentro del subsistema de integración que será el encargado de gestionar el tiempo total de simulación así como de coordinar las diferentes acciones que se produzcan durante el proceso de simulación.
4.3 INTERFACES DE USUARIO
La interfaz de usuario es el componente que permite que los usuarios del sistema puedan interactuar con el resto del simulador. El interfaz representa un papel importante en este tipo de simuladores, puesto que también forma parte del proceso de aprendizaje del operador como mecanismo para manejar el tranvía [LAU90].
El simulador de tranvía presenta dos interfaces: el panel de control de operador y el puesto de instructor.
4.3.1 El panel de control del operador
El panel de control de operador está basado en una interfaz gráfica compuesta por aquellos controles que un operador de tranvía utiliza para las maniobras y operaciones de conducción del tranvía. Básicamente, los controles que se implementan en la interfaz son los instrumentos de cabina que manejan los operadores del tranvía, tales como pulsadores, indicadores, palancas, etc.
El tipo de interfaz gráfica utilizada sigue el esquema del soft-panel. En este tipo de interfaces, la interacción de los operadores con el simulador se realiza a través de varias pantallas sensibles al tacto que exhiben, mediante imágenes de alta calidad, los elementos de los cuadros de la cabina durante la operación.
Básicamente, los tipos de elementos que se encuentran en los paneles son pulsadores, interruptores, indicadores, luces, conmutadores, etc. Se ha especificado la funcionalidad y características de cada objeto [COLL94]. El desarrollo de los paneles se ha realizado usando tecnología de los componentes ActiveX. La mayoría de los componentes así como la aplicación del interfaz gráfica han sido implementados con Microsoft Visual Studio .NET 2003.
Con estos componentes es posible reproducir fácilmente los paneles de la cabina. Además, es posible mostrar diversas imágenes y sonidos como recursos del componente simulado. De esta manera, la tecnología utilizada permite reproducir la lógica y la funcionalidad completa de los componentes al igual que los verdaderos [BLAT92].
El diseño mediante soft-panels representa una solución que es económica en coste y en esfuerzo en el desarrollo de la aplicación. Además de su conveniencia para ser usada como herramienta de entrenamiento, este tipo de interfaz incrementa la flexibilidad en el uso del simulador. Por ejemplo, es posible realizar cambios en los elementos del interfaz para las diferentes configuraciones de la simulación.
Dependiendo del alcance requerido esta interfaz gráfica del alumno podrá ser sustituida total o parcialmente por elementos hardware reales llegando en el ultimo caso a tener una replica de los paneles de la cabina de conducción.
9

4.3.2 Consola del Instructor (CI)
La consola del instructor se compone de una aplicación de interfaz gráfica que ofrece monitorización y control de la simulación. Incorpora la situación de enseñanza en tiempo real (“ver lo que ve el aprendiz”) ofreciendo así mismo un entorno gráfico para introducir modificaciones / averías tanto en el circuito, en las condiciones de conducción y en los sistemas simulados. La CI también ha sido diseñada con el entorno Microsoft Visual Studio .NET 2003.
Las funcionalidades que implementa el CI son: control y monitorización de la sesión de entrenamiento, generación y monitorización de averías, configuración y edición de programas de entrenamiento, grabación y reproducción de ejercicios, base de datos de operadores, instructores y ejercicios realizados, evaluación de la sesión de entrenamiento.
Para mantener un control completo sobre el simulador de tranvía en tiempo real, el interfaz de instructor proporciona la posibilidad al instructor de interactuar con cada entidad del sistema. Por ejemplo, usando esta interfaz, el instructor puede producir eventos pre-definidos al sistema de simulación. Por otra parte, el interfaz de instructor facilita la configuración, el inicio, la parada o la pausa del escenario de entrenamiento.
La utilidad de malfunciones es utilizada para monitorizar y lanzar los eventos de averías. A través de esta ventana, el instructor puede: cambiar y ver el estado de la avería, editar las condiciones de la avería, buscar las malfunciones a través de una vista de árbol, ver la descripción de la malfunción.
La información almacenada en la base de datos incluye un registro de las operaciones no permitidas y maniobras peligrosas efectuadas, así como las acciones llevadas a cabo por los operadores y el instante de tiempo en que se realizaron.
El sistema de análisis y evaluación de los operadores muestra variables y curvas prototípicas predefinidas. Esta utilidad junto con la visualización de la actividad del operador en tiempo real ayuda a seguir el curso de la sesión de entrenamiento.
El sistema de evaluación decide de forma automática la calificación que tienen los usuarios después de realizar los ejercicios, a través de consultas a la base de datos y mediante el cálculo de estadísticas sobre los resultados. Además se implementan un conjunto de facilidades que realizan una variación automática de los parámetros característicos de evaluación.
10

4.4 MODELOS DE CABINA
Este conjunto de modelos representan el comportamiento de los sistemas reales del vehículo partiendo, básicamente, de las acciones del conductor deben realizar los cálculos de las señales que son generadas en el sistema real.
Estos modelos de cabina tienen en cuenta la posibilidad de la duplicación de los mismos ( y cambio de algunas funciones ) cuando el tren esta formado por dos vehículos.
Estas señales son procesadas dentro de este bloque de modelos o bien enviados a otros elementos del SMR para su tratamiento.
Los modelos de cabina incluyen , entre otros :
Control central del vehículo en modos esclavo y maestro ( ZSG )
Sistema de tracción y frenado eléctrico ( ASG )
Frenado hidráulico ( BSG )
Líneas de Mando del vehículo
Sistema de luces
Sistema de puertas
Estos modelos incorporan el comportamiento normal de los sistemas reales así como el funcionamiento ante malfunciones que pueden ser introducidas desde la Consola del Instructor.
El desarrollo de estos modelos de simulación se esta realizando mediante técnicas de orientación a objetos empleando C++ dentro del paquete Visual Studio .NET.
11

5 CONCLUSIONES
El proyecto SIMULCON va a proporcionar una herramienta formativa fundamental para el entrenamiento inicial o re-entrenamiento de conductores de sistemas de transporte urbano, a un coste asumible por operadores de tamaño medio, tanto desde el punto de vista de la propia aplicación como de su mantenimiento. Para ello se ha realizado una aproximación tecnológica que prima la relación coste/beneficio, mediante el empleo de plataformas hardware de bajo coste y software estándar y abierto., pero manteniendo unos criterios de diseño que posibilitan el más elevado nivel de formación, dotando al simulador de herramienta tales como el editor de edificios predefinidos o el módulo evaluador, y manteniendo la máxima fidelidad física posible con los equipos y el viario real. Junto con el simulador se proporciona un conjunto de elementos formativos complementarios, como el manual del instructor y del alumno, y el libro de prácticas y sesiones de entrenamiento.
Todo ello no hubiese sido posible sin el comprometido apoyo de FGV-Metro Valencia y de la Dirección General de Transportes de la Generalitat Valenciana, y el soporte de sus responsables, gestores y técnicos, que los autores de este artículo quieren agradecer de forma expresa. Ello ha permitido que la herramienta haya sido diseñada para cubrir las necesidades reales formativas de un operador de transporte, experiencia insustituible de la que se pueden beneficiar otros posibles usuarios futuros del simulador.
La perfecta colaboración del equipo técnico de Tecnatom, del Instituto de Robótica y del Instituto de Tráfico y Seguridad Vial ha sido fundamental a la hora de desarrollar las soluciones técnicas óptimas en cada área especialista, y de facilitar su integración.
Finalmente, el apoyo del Ministerio a través de la iniciativa PROFIT ha facilitado que una apuesta arriesgada como era este proyecto se vaya a convertir en una realidad desarrollada en España y con tecnología española.
12

6 REFERENCIAS [Hoekstra97] Hoekstra W. et al (1997). Visualization of road designs for assesing human factors aspects in driving simulator. Proceedings of Driving Simulation Conference, DSC'97. Paris, France. De. Teknea. ISBN 2-87717-063-2. [Shah 95] Shah, J. And M. Mäntylä, Parametric and Feature Based CAD/CAM. John Wiley & Sons, Inc., New York, 1995. [Bayarri97] Bayarri, S., Fernández, M., Pareja, I., Coma, I. (1997). An Integrated Interface to design driving simulation scenari. DSC'97. Lyon, France. [Coma98] Coma, I., Rodríguez, R., Fernández, M., et al. (1998). Artgraph: un entorno integrado de desarrollo y ejecución de aplicaciones 3D en tiempo real. CEIG'98. España. [Wolfferlaar96] van Wolfferlaar, P., van Winsum, W. (1996). Traffic generation and scenario control in the TRC Drivinf Simulator Scenario'96. Orlando, USA. [Schikore00] Schikore, M., Papelis, Y., Watson, G. (2000). Advanced Tools for graphical authoring of dynamic virtual enviroments at NADS simulator. DSC'2000. [Fernández99] Fernández, M., Coma, I., Martín, G., Bayarri, S. (1999). A Hierarchical Object Oriented Architecture for the Management of Complex Driving Simulation Scenearios. DSC'99. Paris, France. [Coma01] Coma, I., Fernández, M., Pollock, D., Pareja, I., Rueda, S. (2001). An integrated system for the whole design procces of driving simulation experiments. DSC'2001. Niza, France. [Pareja99] Pareja, I., Coma, I., Bayarri, S., Rueda, S. (1999). Modelado de calidad para la visualización interactiva de carreteras. IX Congreso Español de Informática Gráfica, CEIG'99. Jaén, España. [Lin98] M. Lin and S. Gottschalk, "Collision detection between geometric models: a survey", In the Proceedings of IMA Conference on Mathematics of Surfaces. 1998. [García03] I. García,M. Pla-Castells and R.J. Martínez, "New Models for Fast Contact Force Computation",Industrial Simulation Conference, Universidad Politécnica de Valencia, Valencia, Spain, pp 401-407, 2003. [Tasora01] A. Tasora, "An optimized lagrangian multiplier approach for interactive multibody simulation in kinematic and dynamical digital prototyping",VII ISCSB,2001 [BLAT92] Blattner, M. M., and R. B. Dannenberg, eds. 1992. Multimedia interface design. Reading, MA: Addison-Wesley. [LAU90] Laurel, B., ed. 1990. The art of human-computer interface design. Reading, Mass.: Addison-Wesley. [COLL94] Collins, Dave. 1994 Designing Object oriented User Interfaces. Benjamin Cummings
13