proyecto de grado: caracterizacion del efecto de los …
TRANSCRIPT
PROYECTO DE GRADO:
CARACTERIZACION DEL EFECTO DE LOS END PLATES EN EL ALERON
TRASERO DE UN CARRO DE FORMULA 1
Camilo Gutiérrez Vásquez
201324237
Asesor
Andrés L. González Mancera Ph.D. M.Sc. Ing.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA MECANICA
Mayo de 2018
Bogotá D.C.

i
AGRADECIMIENTOS
Mis principales agradecimientos están dirigidos para mis padres que han sido un gran apoyo a lo
largo de todo mi trayecto por la universidad y siempre me han apoyado en esta experiencia. A mi
hermano, mis tíos y mi abuelita por el apoyo que me han brindado para culminar esta etapa de mi
vida. A mis amigos que siempre me han apoyado y nos hemos ayudado para poder terminar la
universidad y graduarnos. También un especial agradecimiento a mi asesor Andrés González por
los consejos y las ayudas brindadas a lo largo del desarrollo de este proyecto.
ii
1. INTRODUCCION 1
1.1. Trabajos Previos 3
2. OBJETIVOS 5
2.1. Objetivo General 5
2.2. Objetivos Específicos 5
3. MARCO TEORICO 6
3.1. Perfiles Aerodinámicos 6
3.2. Fuerzas aerodinámicas 8
3.3. Coeficientes aerodinámicos 9
3.4. Capa limite 13
3.5. Vórtices 14
3.6. End Plates 17
3.7. Flujos incompresibles 18
3.8. Modelo k-𝜔 SST 18
3.9. CFD (Computational Fluid Dynamics) 19
3.9.1. Discretización por volúmenes finitos 20
3.9.2. Mallas estructuradas 20
3.9.3. Mallas no estructuradas 21
3.9.4. Y+ 21
4. METODOLOGIA 23
4.1. Selección de perfiles aerodinámicos 23
4.2. Geometría de End Plates 28
4.3. Malla superficial de la geometría 31
4.4. Tamaño del dominio computacional 34
4.5. Calculo y captura de la capa limite 37
4.6. Condiciones de frontera 41
4.7. Convergencia de mallas 43
4.8. Simulación 44
4.9. Diseño del experimento 47
4.9.1. Alerones solos sin ningún tipo de End Plate. 47
4.9.2. Alerones con un End Plate estándar geometría establecida por la FIA. 47
4.9.3. Alerones con un End Plate y una apertura en la parte posterior superior del End Plate. 48
iii
4.9.4. Alerones con un End Plate, una apertura en la parte posterior superior del End Plate y
aperturas en la parte superior frontal del End Plate. 48
5. RESULTADOS 49
5.1. Convergencia de los residuales y coeficientes aerodinámicos 49
5.2. Análisis de convergencia 51
5.3. Coeficientes de arrastre y sustentación 52
6. CONCLUSIONES 57
7. RECOMENDACIONES 58
8. BIBLIOGRAFIA 59

iv
Imagen 1 Efecto de la carga aerodinámica en la velocidad de giro [2] 1
Imagen 2 Alerón trasero del RB12 de RedBull temporada 2016 3
Imagen 3 Diferentes configuraciones de alerones para un vehículo de competencia. [3] 4
Imagen 4 Análisis de Vorticidad de un Automóvil Común [4] 5
Imagen 5 Geometría perfil aerodinámico. [5] 6
Imagen 6 Distribución de presión y esfuerzo cortante. [6] 8
Imagen 7 Vectores de las fuerzas aerodinámicas 9
Imagen 8 Perfil de velocidad a través del perfil aerodinámico. [7] 10
Imagen 9 Diferencia de presiones en un perfil aerodinámico. [7] 11
Imagen 10 Separación de la capa limite. [6] 12
Imagen 11 Comportamiento de la capa limite. [8] 13
Imagen 12 Generación de vórtices en un perfil aerodinámico. [6] 15
Imagen 13 Vórtices generados en las puntas del perfil aerodinámico. [6] 16
Imagen 14 Vórtices en un perfil plano. [6] 16
Imagen 15 End Plates en un carro de competición. [9] 17
Imagen 16 Celdas para un volumen de control con sus centroides. 20
Imagen 17 Malla estructurada sobre un perfil aerodinámico [11] 21
Imagen 18 Malla no estructurada en un perfil aerodinámico. 21
Imagen 19 Relación entre Y+ y la velocidad normalizada. 23
Imagen 20 Perfil aerodinámico E423. [12] 24
Imagen 21 Perfil aerodinámico NACA6412. [12] 24
Imagen 22 Restricciones de volúmenes del alerón trasero. [13] 25
Imagen 23 Distancias entre los elementos aerodinámicos. 26
Imagen 24 Configuración final de los elementos aerodinámicos. 26
Imagen 25 Restricciones vista posterior alerón trasero. [13] 27
Imagen 26 Ancho de los perfiles aerodinámicos. 27
Imagen 27 Restricciones geométricas del End Plate. [13] 28
Imagen 28 Bosquejo en dos dimensiones lateral del End Plate. 29
Imagen 29 Restricciones de volúmenes cara posterior. [13] 29
Imagen 30 Vista frontal cambio de ancho del End Plate. 30
Imagen 31 Geometría final de los perfiles y el End Plate. 31
Imagen 32 Malla superficial de la geometría. 31
Imagen 33 Borde de fuga del segundo elemento aerodinámico. 32
Imagen 34 Borde de ataque primer elemento. 32
Imagen 35 Herramienta para la distribución de puntos. 33
Imagen 36 Tamaño del dominio para una geometría establecida. [4] 35
Imagen 37 Dominio a evaluar para la geometría. 35
Imagen 38 Dimensiones en mm de las cajas de refinamiento. 36
Imagen 39 Herramienta para la creación de las cajas de refinamiento. 36
Imagen 40 Calculo de primera celda con Y+ de 10. [15] 38
Imagen 41 Calculo de la cantidad de elementos necesarios. 39
Imagen 42 Herramienta computacional de T-Rex. 40
Imagen 43 Generación de capa de prismas en el plano de simetría. 40
Imagen 44 Parametrización de la convergencia de mallas. 43

v
Imagen 45 Setup régimen incompresible. 44
Imagen 46 Modelo de turbulencia. 45
Imagen 47 Condiciones de frontera. 45
Imagen 48 Valores de referencia coeficientes aerodinámicos. 46
Imagen 49 Acople de presión y velocidad. 46
Imagen 50 Geometría Alerón. 47
Imagen 51 Geometría alerón con End Plate. 47
Imagen 52 Geometría con apertura en el End Plate. 48
Imagen 53 Geometría con aperturas delanteras y trasera. 48
Imagen 54 End Plates temporada 2017. 49
Imagen 55 Convergencia residuales. 50
Imagen 56 Convergencia coeficiente de arrastre. 50
Imagen 57 Convergencia coeficiente de sustentación. 50
Imagen 58 Valores del coeficiente de arrastre análisis de convergencia. 51
Imagen 59 Resultados análisis de convergencia. 51
Imagen 60 Comparación de coeficientes aerodinámicos. 52
Imagen 61 Comparación entre la geometría con y sin End Plate 52
Imagen 62 Comparación en el flujo del fluido Con End Plate (izquierda) y sin End Plate (derecha). 53
Imagen 63 Comparación de las zonas de presión con End Plate (izquierda) y sin End Plate (derecha). 53
Imagen 64 Comparación de la intensidad de los vórtices con End Plate (izquierda) y sin End Plate
(derecha) a una distancia de 0.5 m del borde de ataque. 54
Imagen 65 Comparación geometrías con y sin agujeros. 54
Imagen 66 Comparaciones vorticidad entre End Plate estándar (izquierda) y End Plate con aperturas
(derecha) a 0.35 m del borde de ataque. 55
Imagen 67 Comparaciones vorticidad entre End Plate estándar (izquierda) y End Plate con aperturas
(derecha) a 0.3 m del borde de ataque. 55
Imagen 68 Configuración de End Plates para la pista de Monza. 56
Imagen 69 Configuración para la pista de Mónaco. 57

1
1. INTRODUCCION
Desde el año 1950 cuando fue inaugurada la primera carrera del campeonato mundial de
la Formula 1 [1], el objetivo principal siempre ha sido el de poseer el automóvil más rápido
de toda la grilla de partida. Por esta razón los ingenieros y las personas encargadas de la
fabricación y diseño de los automóviles están en constante pelea por obtener avances
tecnológicos que ayuden con este propósito. Debido a esto los equipos implementan
elementos aerodinámicos llamados alerones los cuales ayudan a reducir los tiempos de
vuelta de los automóviles alrededor de un circuito. Esto debido a que estos elementos
aumentan la carga aerodinámica del automóvil generando que en las curvas y puntos de
frenado se puedan ejercer más fuerzas laterales y frontales a las llantas.
Imagen 1 Efecto de la carga aerodinámica en la velocidad de giro [2]
2
Uno de estos elementos aerodinámicos usados en la Formula 1 es el alerón trasero el cual
es parte fundamental de la configuración aerodinámica, este es básicamente un perfil alar
invertido que genera sustentación en dirección vertical hacia el suelo. Este tipo de alerones
se utiliza en varias configuraciones con diferentes tipos de perfiles aerodinámicos y con
diferentes componentes que ayudan a la eficiencia de estos mismos. Estas configuraciones
deben ser probadas por los ingenieros y diseñadores para observar los efectos de estos
componentes en la eficiencia del automóvil, esto se puede realizar de varias maneras como
lo son la prueba experimental en pista, la prueba experimental en túneles de viento o por
simulaciones computacionales.
Debido al alto costo de las pruebas experimentales en pista y ya que la disponibilidad y
facilidad de hacer pruebas en el túnel de viento no es la mejor, la mejor opción para pruebas
de los diferentes componentes es la de simulaciones computacionales o CFD
(Computacional Fluid Dynamics). Este último es un recurso que se ha venido
implementando en los últimos años debido a que antes no se poseían con los recursos
computacionales para lograr estas pruebas. Cada vez más equipos de competencias
automovilísticas como equipos de universidades para las competencias de la Formula SAE
han implementado este tipo de pruebas en su proceso de diseño.
El alerón trasero posee uno de sus componentes principales llamados paneles laterales o
End Plates, la principal funcionalidad de estos es de sostener y dar estabilidad estructural
al alerón trasero, también el de disminuir el arrastre generado por el alerón trasero y así
aumentar la eficiencia del automóvil. Estos elementos son fundamentales en la actualidad
para las configuraciones de los automóviles de Formula 1.

3
Imagen 2 Alerón trasero del RB12 de RedBull temporada 2016
Por lo anterior, se realizó un análisis computacional de diferentes configuraciones para el
End Plate de un automóvil de Formula 1 con una configuración especifica de alerones. Para
esto se utilizaron diferentes herramientas computacionales como: Pointwise (Enmallador),
ANSYS Fluent (Solucionador) y ParaView como el visualizador de resultados. Con el fin
de evaluar y obtener la mejor configuración de los End Plates y el efecto de los mismos en
el alerón trasero de un automóvil de Formula 1.
1.1. Trabajos Previos
1.1.1. El primer trabajo analizado para esta investigación fue el desarrollado por Nicolás
Rojas Aragón en mayo de 2016 sobre “Desarrollo de un Estudio Computacional
para el Análisis de Uno o Más Alerones para Vehículos de Competencia.” [3]. Este
se basaba en principalmente encontrar la mejor configuración uno o más elementos
para un alerón trasero de autos de competencia a partir de simulaciones.
4
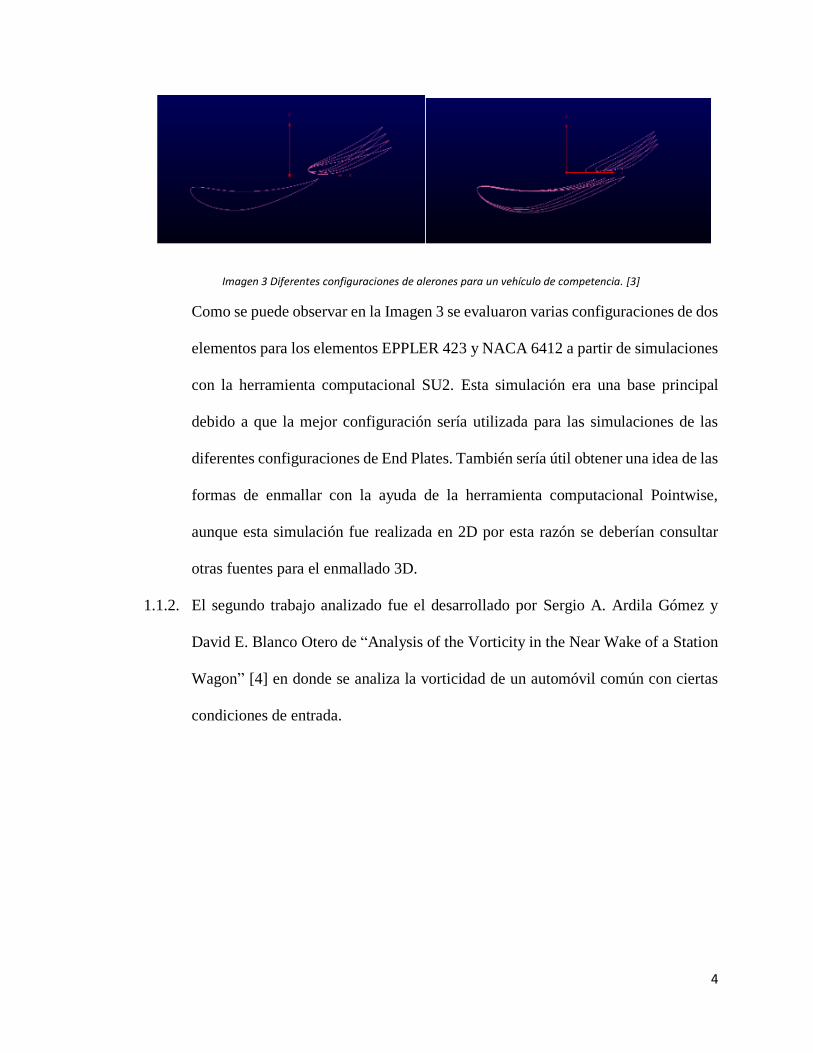
Imagen 3 Diferentes configuraciones de alerones para un vehículo de competencia. [3]
Como se puede observar en la Imagen 3 se evaluaron varias configuraciones de dos
elementos para los elementos EPPLER 423 y NACA 6412 a partir de simulaciones
con la herramienta computacional SU2. Esta simulación era una base principal
debido a que la mejor configuración sería utilizada para las simulaciones de las
diferentes configuraciones de End Plates. También sería útil obtener una idea de las
formas de enmallar con la ayuda de la herramienta computacional Pointwise,
aunque esta simulación fue realizada en 2D por esta razón se deberían consultar
otras fuentes para el enmallado 3D.
1.1.2. El segundo trabajo analizado fue el desarrollado por Sergio A. Ardila Gómez y
David E. Blanco Otero de “Analysis of the Vorticity in the Near Wake of a Station
Wagon” [4] en donde se analiza la vorticidad de un automóvil común con ciertas
condiciones de entrada.
5
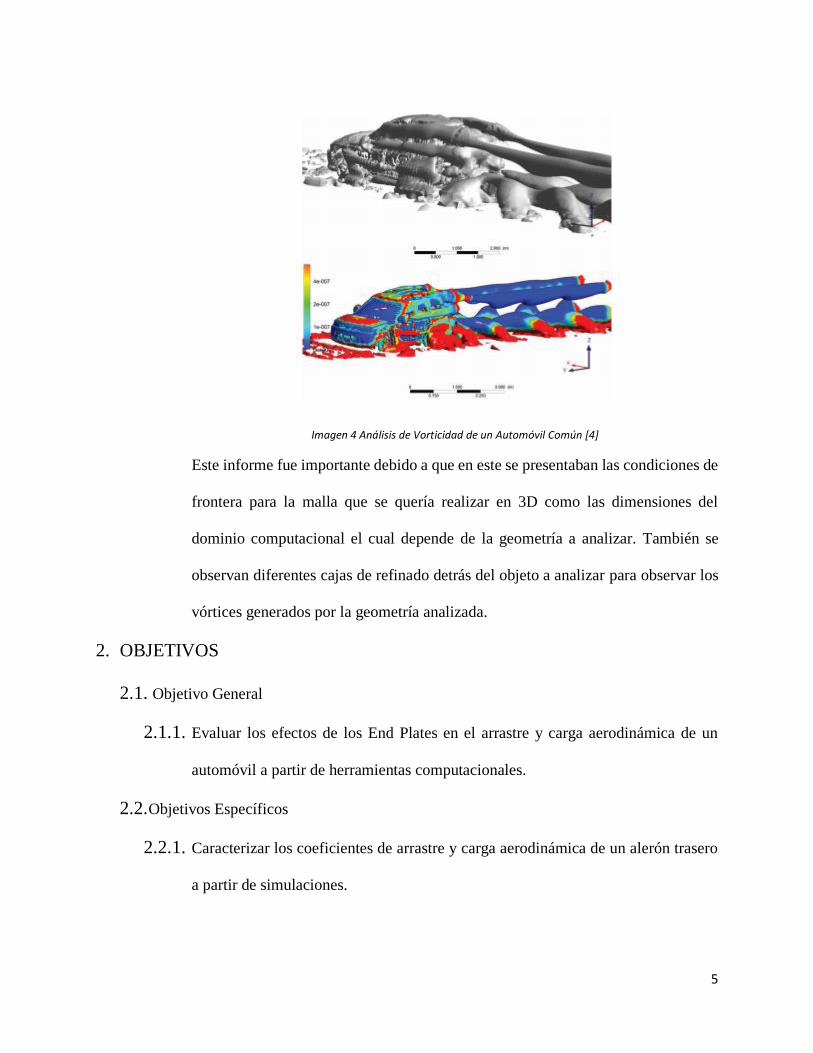
Imagen 4 Análisis de Vorticidad de un Automóvil Común [4]
Este informe fue importante debido a que en este se presentaban las condiciones de
frontera para la malla que se quería realizar en 3D como las dimensiones del
dominio computacional el cual depende de la geometría a analizar. También se
observan diferentes cajas de refinado detrás del objeto a analizar para observar los
vórtices generados por la geometría analizada.
2. OBJETIVOS
2.1. Objetivo General
2.1.1. Evaluar los efectos de los End Plates en el arrastre y carga aerodinámica de un
automóvil a partir de herramientas computacionales.
2.2. Objetivos Específicos
2.2.1. Caracterizar los coeficientes de arrastre y carga aerodinámica de un alerón trasero
a partir de simulaciones.
6
2.2.2. Caracterizar los coeficientes de arrastre y carga aerodinámica de un alerón trasero
con End Plates de diferentes configuraciones a partir de simulaciones.
2.2.3. Comparar los resultados del alerón con y sin End Plates.
2.2.4. Escoger la mejor configuración de End Plates para el alerón a partir de los
resultados y trabajos previos.
3. MARCO TEORICO
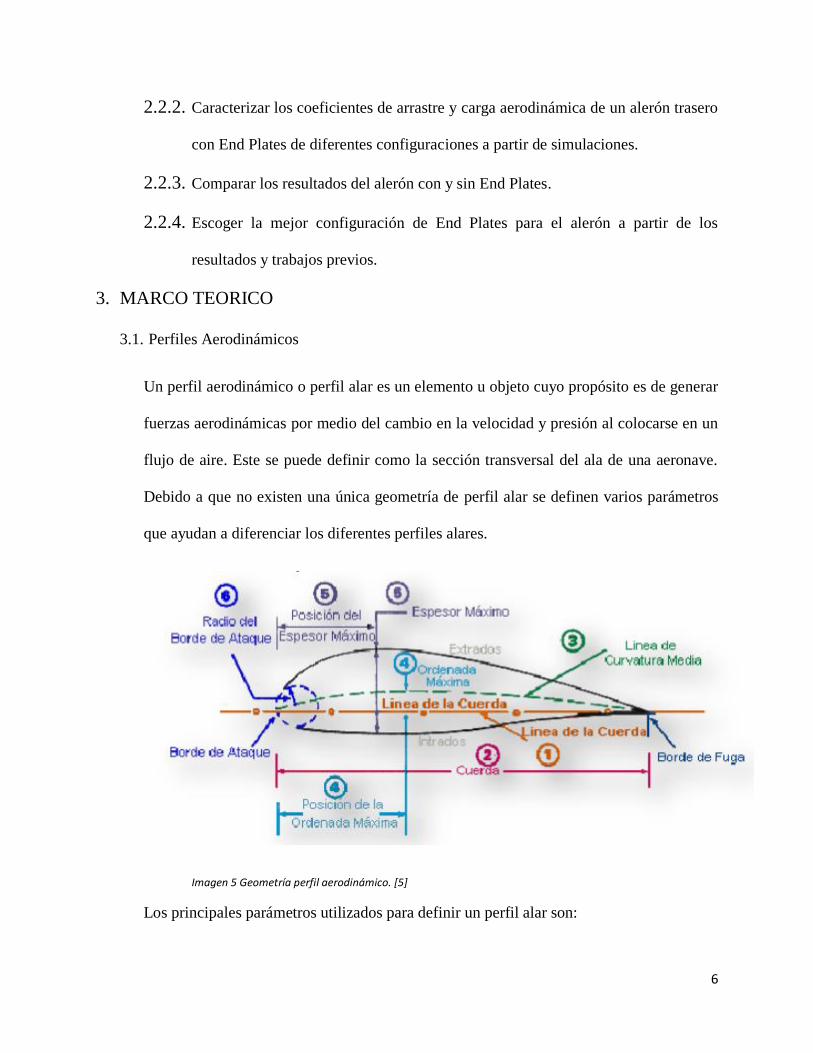
3.1. Perfiles Aerodinámicos
Un perfil aerodinámico o perfil alar es un elemento u objeto cuyo propósito es de generar
fuerzas aerodinámicas por medio del cambio en la velocidad y presión al colocarse en un
flujo de aire. Este se puede definir como la sección transversal del ala de una aeronave.
Debido a que no existen una única geometría de perfil alar se definen varios parámetros
que ayudan a diferenciar los diferentes perfiles alares.
Imagen 5 Geometría perfil aerodinámico. [5]
Los principales parámetros utilizados para definir un perfil alar son:

7
• Cuerda: se define como la línea que une con una recta el borde de ataque y borde
de fuga.
• Borde de ataque: es el lugar en donde comienza el contacto del fluido con el perfil
y donde se encuentran características como el radio del borde de ataque, el punto
de velocidad cero y el inicio de la cuerda.
• Borde de fuga: es el lugar donde termina el contacto del fluido con el perfil, este
puedo tener diferentes geometrías como un borde de un solo punto o dos puntos.
• Espesor máximo: este es lugar donde el perfil tiene el ancho máximo y este es
importante tanto en su efecto en los coeficientes aerodinámicos como para su
referencia dentro de los perfiles aerodinámicos.
• Angulo de ataque: se define como el ángulo generado entre la línea de la cuerda y
la dirección del fluido que incide sobre el perfil.
• Línea de curvatura: esta es la línea que divide el perfil aerodinámico simétricamente
debido a que en perfil no simétricos esta no coincide con la línea de cuerda.
• Extradós: se define como la superficie del perfil con mayor longitud entre el borde
de ataque y el borde de fuga si este se midiera sobre la superficie del perfil; es aquí
donde la velocidad del fluido es mayor en comparación con la velocidad original
del flujo.
• Intradós: se define como la superficie del perfil con menor longitud entre el borde
de ataque y el borde de fuga si este se midiera sobre la superficie del perfil; es aquí
donde la velocidad del fluido es menor en comparación con la velocidad generada
en extradós.

8
Una de estas principales divisiones es si son simétricos o asimétricos (con curvatura). Los
perfiles simétricos se definen como los perfiles donde la línea de curvatura y la línea de la
cuerda coinciden.
3.2. Fuerzas aerodinámicas
Para todos los diferentes casos de aplicación de la aerodinámica en la vida cotidiana las
fuerzas aerodinámicas y momentos en el cuerpo están regidos por dos principales fuentes:
y estos son: La distribución de la presión a través del cuerpo y la distribución del esfuerzo
cortante sobre el cuerpo como se puede ver en la Imagen 6. En esta imagen se puede ver
como la presión actúa perpendicular a la superficie sobre la que actúa y el esfuerzo cortante
actúa paralelo a la superficie.
Imagen 6 Distribución de presión y esfuerzo cortante. [6]
La sumatoria de todos los componentes de presión y esfuerzo que actúan sobre el perfil
aerodinámico dan como resultado una fuerza aerodinámica R y un momento sobre el cuerpo M.
la componente R de la fuerza aerodinámica se puede descomponer en dos principales fuerzas que
actúan sobre el perfil aerodinámico llamadas D o arrastre aerodinámico y L o sustentación
aerodinámico, el arrastre siendo paralelo a la dirección del flujo del fluido y la sustentación siendo
perpendicular a la dirección del flujo del fluido.

9
Imagen 7 Vectores de las fuerzas aerodinámicas
3.3. Coeficientes aerodinámicos
Debido a que la aerodinámica teórica requiere poder comparar y evaluar cualquier tipo de
cuerpo geométrico y condiciones de fluido, se necesita que los valores a analizar sean
adimensionales con la idea que poder comparar a diferentes escalas y con diferentes
cuerpos y geometrías las dos principales fuerzas aerodinámicas de arrastre y sustentación
que afectan nuestro cuerpo. Estos números adimensionales se definen tanto para el arrastre
como la sustentación y están definidos por las ecuaciones:
𝐶𝐿 =𝐿
12 ∗ 𝜌∞ ∗ 𝐴𝑟𝑒𝑓 ∗ 𝑉∞2
𝐶𝐷 =𝐷
12 ∗ 𝜌∞ ∗ 𝐴𝑟𝑒𝑓 ∗ 𝑉∞2
Donde L se define como la Fuerza de sustentación, D la fuerza de arrastre, 𝜌∞ como la
densidad del fluido antes de interactuar con el perfil, 𝐴𝑟𝑒𝑓 es el área de referencia en la
dirección de la fuerza respectiva, V∞ siendo la velocidad del flujo antes de interactuar con
el perfil aerodinámico, 𝐶𝐿 siendo el coeficiente de sustentación y 𝐶𝐷 siendo el coeficiente
de arrastre.

10
Sobre cada uno de estos coeficientes existe un fenómeno que ejerce el papel más
importante, para el coeficiente de sustentación es la diferencia de presiones entre extradós
e intradós del perfil.
Debido a que el flujo mantiene una velocidad antes de interactuar con el perfil este al
encontrar el perfil se estanca y luego se reparte para rodear el perfil tanto por extradós
como por intradós. El punto donde la velocidad es cero debido a que se estanca contra el
perfil aerodinámico se llama punto de estancamiento. La velocidad del fluido está
directamente relacionada con la distancia como se puede observar en la siguiente
ecuación.
𝑉 = 𝑥 ∗ 𝑡
Donde V es la velocidad, x es la distancia y t es el tiempo. En extradós una vez el flujo se
divide sucede que ya que la distancia que debía recorrer es mayor que la original la
velocidad del fluido aumenta mientras supera al perfil aerodinámico, mientras que en
intradós la distancia a recorrer es mayor a la original, pero es menor a la distancia en
extradós esto genera que la velocidad del fluido en intradós sea menor que la velocidad en
extradós como se puede observar en la Imagen 8.
Imagen 8 Perfil de velocidad a través del perfil aerodinámico. [7]
11
Gracias a este fenómeno donde la velocidad cambia con respecto a la velocidad del fluido
se genera un cambio en las presiones de las zonas inmediatas donde el flujo cambia su
velocidad y esto está regido por la ecuación de Bernoulli.
𝑃1 +1
2∗ 𝜌∞ ∗ 𝑉1
2 = 𝑃2 +1
2∗ 𝜌∞ ∗ 𝑉2
2
Donde P es la presión en la zona respectiva asumiendo que la altura de referencia se
mantiene constante. Gracias a esta ecuación se puede observar que cuando la velocidad en
una zona aumenta en comparación con la zona original la presión disminuye y si la
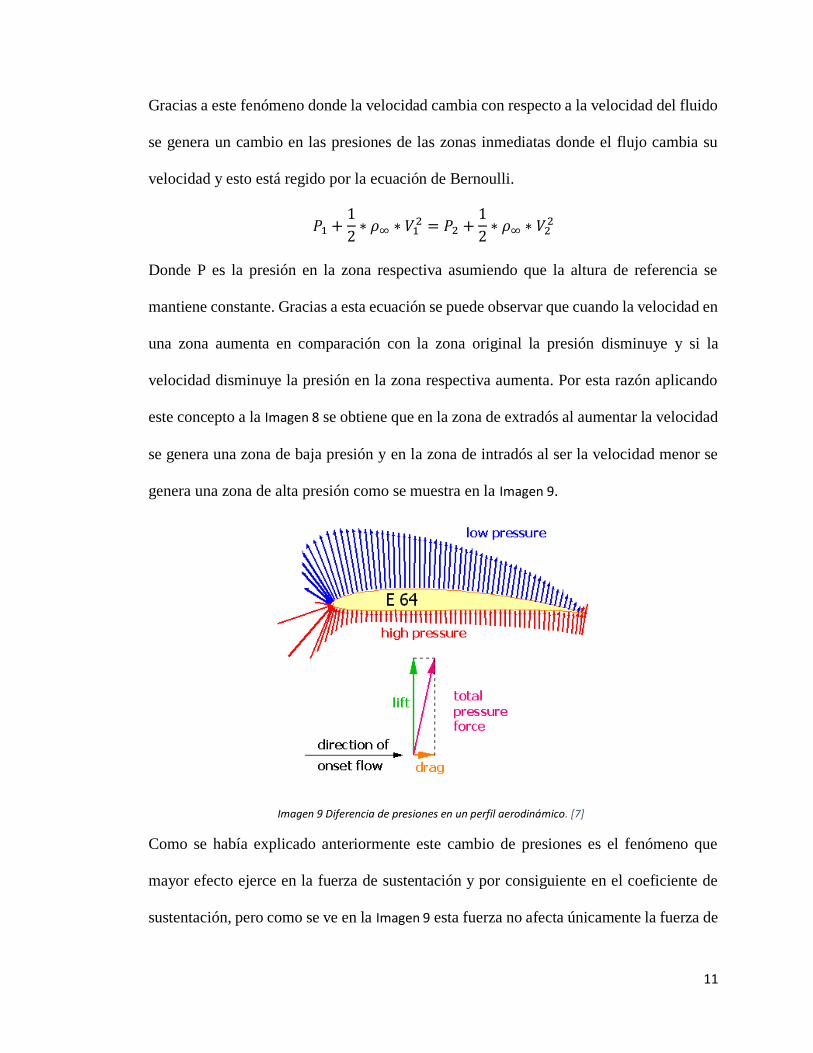
velocidad disminuye la presión en la zona respectiva aumenta. Por esta razón aplicando
este concepto a la Imagen 8 se obtiene que en la zona de extradós al aumentar la velocidad
se genera una zona de baja presión y en la zona de intradós al ser la velocidad menor se
genera una zona de alta presión como se muestra en la Imagen 9.
Imagen 9 Diferencia de presiones en un perfil aerodinámico. [7]
Como se había explicado anteriormente este cambio de presiones es el fenómeno que
mayor efecto ejerce en la fuerza de sustentación y por consiguiente en el coeficiente de
sustentación, pero como se ve en la Imagen 9 esta fuerza no afecta únicamente la fuerza de

12
sustentación, también afecta la fuerza de arrastre en menor magnitud. La fuerza de arrastre
esta principalmente afectada no por el fenómeno de diferencia de presiones sino por dos
fenómenos principalmente.
El primero es el esfuerzo cortante genera por el contacto directo del perfil aerodinámico
con el fluido como se puede observar en la Imagen 6. Y el segundo es debido a una
diferencia de presiones, aunque estas son las presiones generadas en el borde de ataque y
el borde de fuga.
Debido a que el fluido viene en la misma dirección que la línea de la cuerda el borde de
ataque es el primer contacto y se genera el punto de estancamiento previamente
mencionado. Este punto genera un punto de alta presión debido a la acumulación del fluido
al contacto con el perfil aerodinámico, mientras que en el borde de fuga del perfil se genera
un punto de baja presión debido al vacío generado por el perfil aerodinámico y también
gracias a un fenómeno conocido como el desprendimiento de la capa limite donde genera
una zona de baja presión y este aumenta a medida que el ángulo de ataque aumenta como
se muestra en la Imagen 10.
Imagen 10 Separación de la capa limite. [6]
13
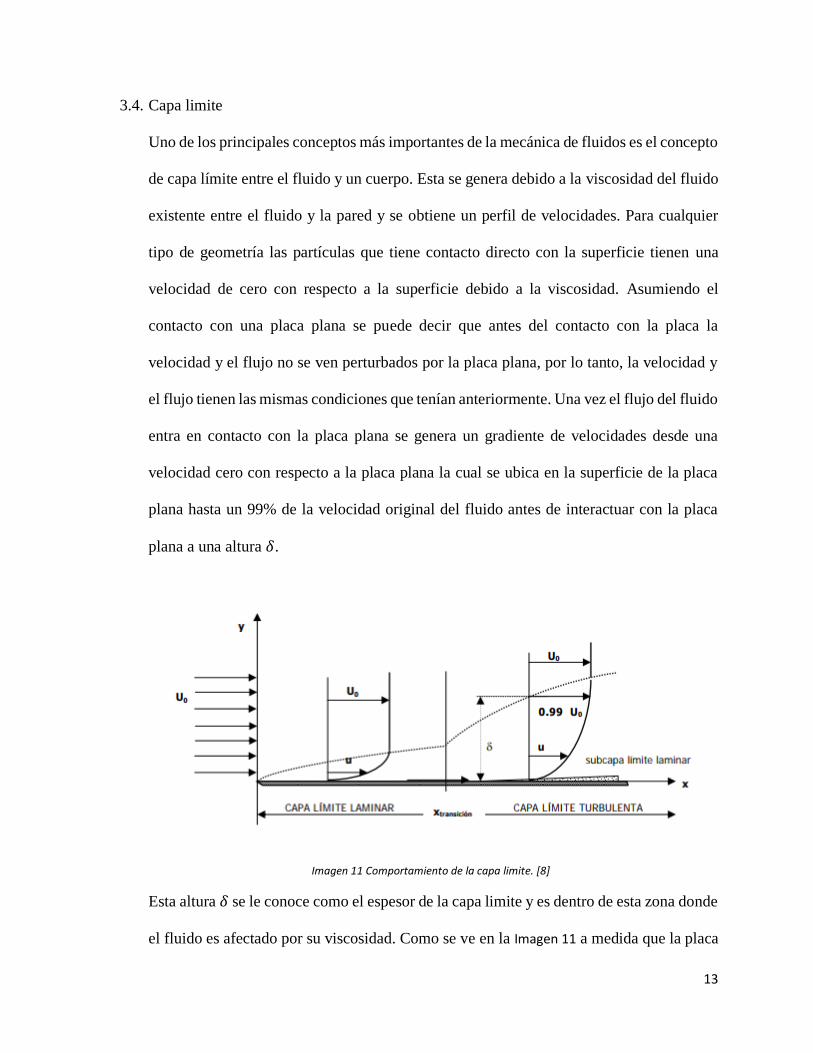
3.4. Capa limite
Uno de los principales conceptos más importantes de la mecánica de fluidos es el concepto
de capa límite entre el fluido y un cuerpo. Esta se genera debido a la viscosidad del fluido
existente entre el fluido y la pared y se obtiene un perfil de velocidades. Para cualquier
tipo de geometría las partículas que tiene contacto directo con la superficie tienen una
velocidad de cero con respecto a la superficie debido a la viscosidad. Asumiendo el
contacto con una placa plana se puede decir que antes del contacto con la placa la
velocidad y el flujo no se ven perturbados por la placa plana, por lo tanto, la velocidad y
el flujo tienen las mismas condiciones que tenían anteriormente. Una vez el flujo del fluido
entra en contacto con la placa plana se genera un gradiente de velocidades desde una
velocidad cero con respecto a la placa plana la cual se ubica en la superficie de la placa
plana hasta un 99% de la velocidad original del fluido antes de interactuar con la placa
plana a una altura 𝛿.
Imagen 11 Comportamiento de la capa limite. [8]
Esta altura 𝛿 se le conoce como el espesor de la capa limite y es dentro de esta zona donde
el fluido es afectado por su viscosidad. Como se ve en la Imagen 11 a medida que la placa

14
plana es más larga el efecto sobre el fluido aumenta y más partículas son frenadas por este
efecto por lo tanto el espesor de la capa limite es mayor. Llega a un punto donde este flujo
de las partículas que están siendo frenadas deja de ser laminar y pasa a ser un flujo
turbulento donde el crecimiento del espesor de la capa limite aumenta considerablemente.
Este modelo turbulento ha sido estudiado por muchos como Karman, Prandtl y muchos
discípulos de él debido a esto existen muchas aproximaciones a como se debe calcular el
espesor de la capa limite.
3.5. Vórtices
En las secciones anteriores solo se ha hablado de un perfil aerodinámico en dos
dimensiones y asumiendo un flujo que está contenido en dos dimensiones también
asumiendo que los perfiles aerodinámicos son infinitos. Pero en la vida real no es así, en
realidad todos los perfiles aerodinámicos en 3 dimensiones tienen una distancia entre la
raíz y la punta. Y el flujo de un fluido está definido en un volumen de 3 dimensiones he
interactúa en estas 3 dimensiones con los objetos que se coloquen en el volumen de
control. También anteriormente se explicó que la diferencia de presiones es el fenómeno
que afecta de mayor manera la fuerza de sustentación que genera un perfil aerodinámico.
15
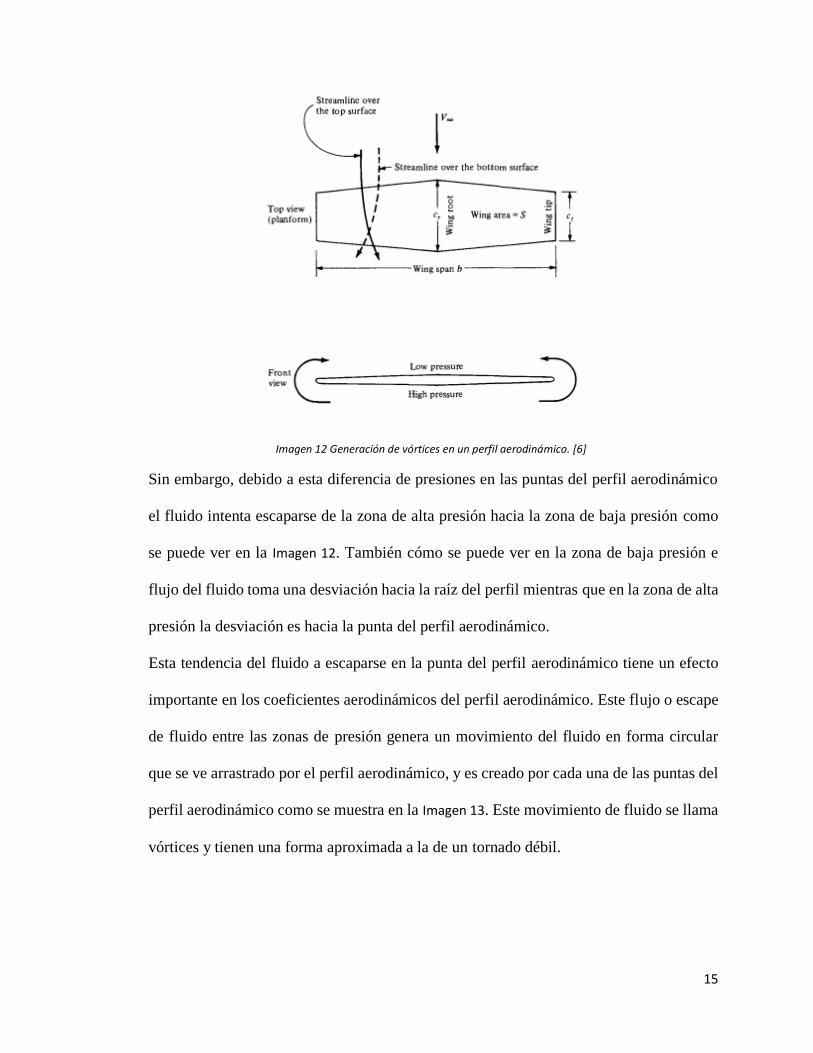
Imagen 12 Generación de vórtices en un perfil aerodinámico. [6]
Sin embargo, debido a esta diferencia de presiones en las puntas del perfil aerodinámico
el fluido intenta escaparse de la zona de alta presión hacia la zona de baja presión como
se puede ver en la Imagen 12. También cómo se puede ver en la zona de baja presión e
flujo del fluido toma una desviación hacia la raíz del perfil mientras que en la zona de alta
presión la desviación es hacia la punta del perfil aerodinámico.
Esta tendencia del fluido a escaparse en la punta del perfil aerodinámico tiene un efecto
importante en los coeficientes aerodinámicos del perfil aerodinámico. Este flujo o escape
de fluido entre las zonas de presión genera un movimiento del fluido en forma circular
que se ve arrastrado por el perfil aerodinámico, y es creado por cada una de las puntas del
perfil aerodinámico como se muestra en la Imagen 13. Este movimiento de fluido se llama
vórtices y tienen una forma aproximada a la de un tornado débil.

16
Imagen 13 Vórtices generados en las puntas del perfil aerodinámico. [6]
Las consecuencias principales de estos vórtices son dos: en la sustentación debido al flujo
hacia la parte de baja presión se genera un empuje en dirección contraria al generado por
la diferencia de presiones entre extradós e intradós, también se genera un fenómeno
llamado arrastre inducido el cual es generado por los vórtices. Esto se da ya que los
vórtices contienen una alta cantidad de energía dentro de su movimiento de air en este
fenómeno y esta energía debe venir de algún lugar. Por lo tanto, esta energía es energía
que se pierde por medio del arrastre del perfil aerodinámico.
Estos vórtices también generan una perturbación en el flujo de fluido que va detrás de
ellos y por lo tanto afectan a todo cuerpo que interactúa con ellos debido a que no es un
flujo laminar como el antecede al perfil aerodinámico como se puede ver en la Imagen 14.
Imagen 14 Vórtices en un perfil plano. [6]

17
3.6. End Plates
Como se vio los vórtices generados en un perfil aerodinámico son una causa importante
de la generación del arrastre inducido en el perfil. Por esta razón la reducción de estos
vórtices ha sido un tema que desde 1968 se ha venido mejorando e investigando hasta la
actualidad en la fórmula 1. Por esta razón se implementó un nuevo elemento aerodinámico
llamado End Plates que se ubicarían en las puntas de los perfiles aerodinámicos tanto del
ala delantera como del ala trasera del carro de Fórmula 1. Estos elementos se diseñaron
originalmente en 1897 por Frederick W. Lanchester. Aunque estos elementos no eran para
el uso específico de la fórmula 1 Frederick ya sabía sobre el efecto de los vórtices en las
puntas de los perfiles aerodinámicos y los diseño para perfiles de alas de aviones incluso
cuando la aviación no había llegado a su apogeo.
Imagen 15 End Plates en un carro de competición. [9]
La principal idea o propósito e estos elementos era de reducir los vórtices generados en
las puntas de los perfiles alares, esto se lograba al poner una lámina en las puntas de los
perfiles no permitiendo el escape del fluido de la zona de alta presión hacia la zona de baja

18
presión. Este elemento no eliminaba este problema de vórtices más si lo disminuía en gran
magnitud. También ayudaba a reducir la perdida de sustentación por el flujo de fluido
entre las dos zonas de presión.
3.7. Flujos incompresibles
Debido a que la velocidad a la que los carros de fórmula 1 corren no es mayor a los 380
km/h el rango de velocidades en los que estos operan están dentro del rango subsónico y
por lo tanto se puede considerar al aire como un fluido incompresible y gracias a esto se
pueden utilizar las ecuaciones de cantidad de movimiento o Navier-Stokes y de
continuidad respectivamente:
𝜌𝐷�⃗�
𝐷𝑡= −∇⃗⃗ 𝑃 + 𝜌𝑔 + 𝜇∇2�⃗�
𝜕𝑢
𝜕𝑥+
𝜕𝑣
𝜕𝑦+
𝜕𝑤
𝜕𝑧= 0
La ecuación de Navier-Stokes se puede dividir en sus componentes y escribir de una forma
más adecuada para el desarrollo del método de discretización de volúmenes finitos:
La componente X
𝜌𝐷𝑢
𝐷𝑡= −
𝜕𝑃
𝜕𝑥+ 𝑑𝑖𝑣(𝜇 𝑔𝑟𝑎𝑑 𝑢) + 𝑆𝑀𝑥
La componente Y
𝜌𝐷𝑣
𝐷𝑡= −
𝜕𝑃
𝜕𝑦+ 𝑑𝑖𝑣(𝜇 𝑔𝑟𝑎𝑑 𝑣) + 𝑆𝑀𝑦
La componente Z
𝜌𝐷𝑤
𝐷𝑡= −
𝜕𝑃
𝜕𝑧+ 𝑑𝑖𝑣(𝜇 𝑔𝑟𝑎𝑑 𝑤) + 𝑆𝑀𝑧
3.8. Modelo k-𝜔 SST

19
El modelo de turbulencia k-𝜔 SST es un modelo de viscosidad Eddy de dos ecuaciones.
Este modelo se ha vuelto muy popular debido a que es una combinación de dos de los
mejores modelos de turbulencia como el k-𝜔 y k-𝜖. Usa el modelo k-𝜔 para las partes
internas de la capa limite y la capa sub viscosa por esta razón puede ser usado para modelos
de Reynolds bajos. Mientras que la formulación SST cambia a un modelo de turbulencia
k-𝜖 en el flujo libre para evitar el problema del modelo k-𝜔 donde la turbulencia en el
flujo libre es muy afectada por las condiciones de turbulencia de la entrada del flujo libre.
Por estas razones se procedió a utilizar este modelo ya que capta de buena manea lo que
sucede en la capa limite y lo que sucede en el flujo libre. Una de las desventajas de esto
modelo es que toma aproximada mente 7 veces el tiempo que tomaría en realizar una
simulación con el modelo de turbulencia Spalart-Allmaras.
Las ecuaciones que utiliza el programa Fluent para solucionar son [10]:
Para k
𝜕
𝜕𝑡(𝜌𝑘) +
𝜕
𝜕𝑥𝑖
(𝜌𝑘𝑢𝑖) =𝜕
𝜕𝑥𝑗((𝜇 + (
𝜇𝑡
𝜎𝑘))
𝜕𝑘
𝜕𝑥𝑗) + 𝐺𝑘 − 𝑌𝑘 + 𝑆𝑘
Para 𝜔
𝜕
𝜕𝑡(𝜌𝜔) +
𝜕
𝜕𝑥𝑖
(𝜌𝜔𝑢𝑖) =𝜕
𝜕𝑥𝑗((𝜇 + (
𝜇𝑡
𝜎𝜔))
𝜕𝜔
𝜕𝑥𝑗) + 𝐺𝜔 − 𝑌𝜔 + 𝐷𝜔 + 𝑆𝜔
Y las constantes del modelo son:
𝜎𝑘,1 = 1.176, 𝜎𝜔,1 = 2.0, 𝜎𝑘,2 = 1.0, 𝜎𝜔,2 = 1.168,
𝑎1 = 0.31, 𝛽𝑖,1 = 0.075, 𝛽𝑖,2 = 0.0828
Las demás constantes de este modelo son las mismas que el modelo k-𝜔 estándar. [10]
3.9. CFD (Computational Fluid Dynamics)
20
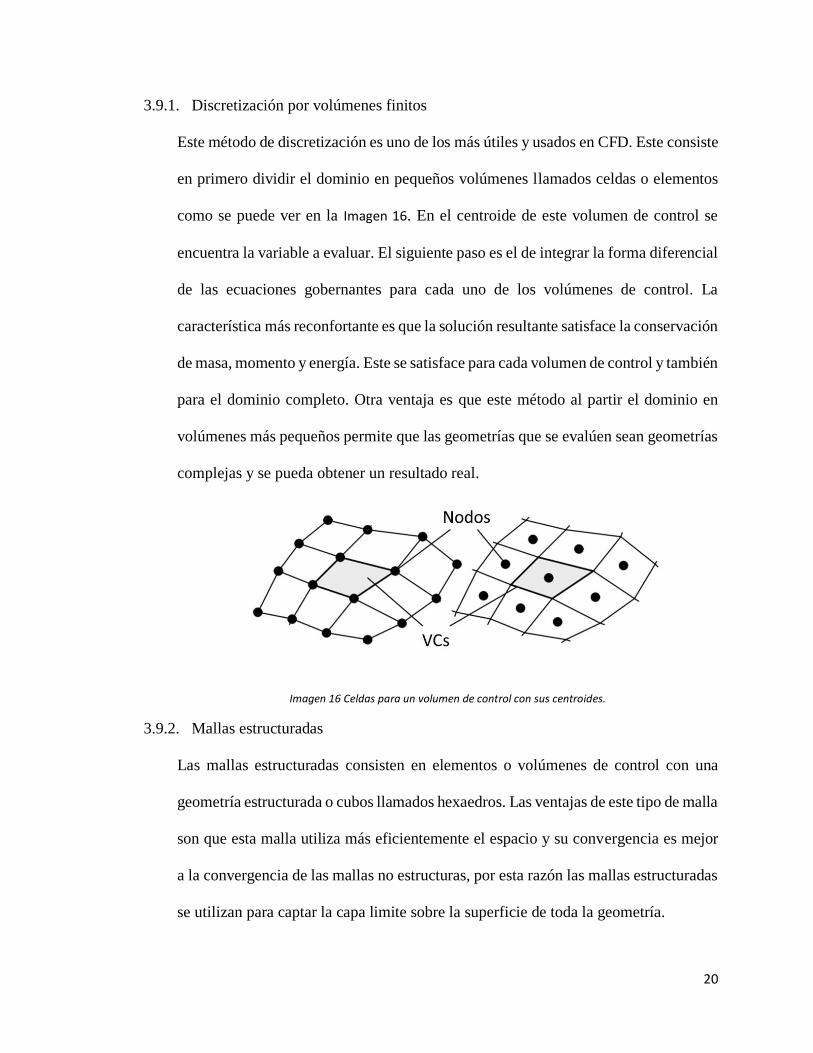
3.9.1. Discretización por volúmenes finitos
Este método de discretización es uno de los más útiles y usados en CFD. Este consiste
en primero dividir el dominio en pequeños volúmenes llamados celdas o elementos
como se puede ver en la Imagen 16. En el centroide de este volumen de control se
encuentra la variable a evaluar. El siguiente paso es el de integrar la forma diferencial
de las ecuaciones gobernantes para cada uno de los volúmenes de control. La
característica más reconfortante es que la solución resultante satisface la conservación
de masa, momento y energía. Este se satisface para cada volumen de control y también
para el dominio completo. Otra ventaja es que este método al partir el dominio en
volúmenes más pequeños permite que las geometrías que se evalúen sean geometrías
complejas y se pueda obtener un resultado real.
Imagen 16 Celdas para un volumen de control con sus centroides.
3.9.2. Mallas estructuradas
Las mallas estructuradas consisten en elementos o volúmenes de control con una
geometría estructurada o cubos llamados hexaedros. Las ventajas de este tipo de malla
son que esta malla utiliza más eficientemente el espacio y su convergencia es mejor
a la convergencia de las mallas no estructuras, por esta razón las mallas estructuradas
se utilizan para captar la capa limite sobre la superficie de toda la geometría.

21
Imagen 17 Malla estructurada sobre un perfil aerodinámico [11]
3.9.3. Mallas no estructuradas
Las mallas no estructuradas consisten en elementos o volúmenes de control con una
geometría no estructurada compuesta de triángulos o tetraedros en un patrón irregular.
También se pueden utilizar cuadriláteros y hexaedros en una malla 3D. estas mallas
son usadas mayor mente en la parte exterior del dominio debido a que son bastante
ineficiente en cuando a la memoria del computador debido a que requieren que se
conozcan las relaciones con los vecinos.
Imagen 18 Malla no estructurada en un perfil aerodinámico.
3.9.4. Y+
22
El concepto de Y+ es un concepto muy utilizado a lo largo de las simulaciones de
CFD debido a que con este concepto se pueden encontrar o caracterizar diferentes
tipos de conceptos dentro de las simulaciones. Este concepto se usa tanto para saber
la resolución y tamaño de una malla también para saber qué modelo de turbulencia es
adecuado utilizar para solucionar el problema o para hallar el tamaño de las celdas
necesarias para capturar los cambios en la capa limite.
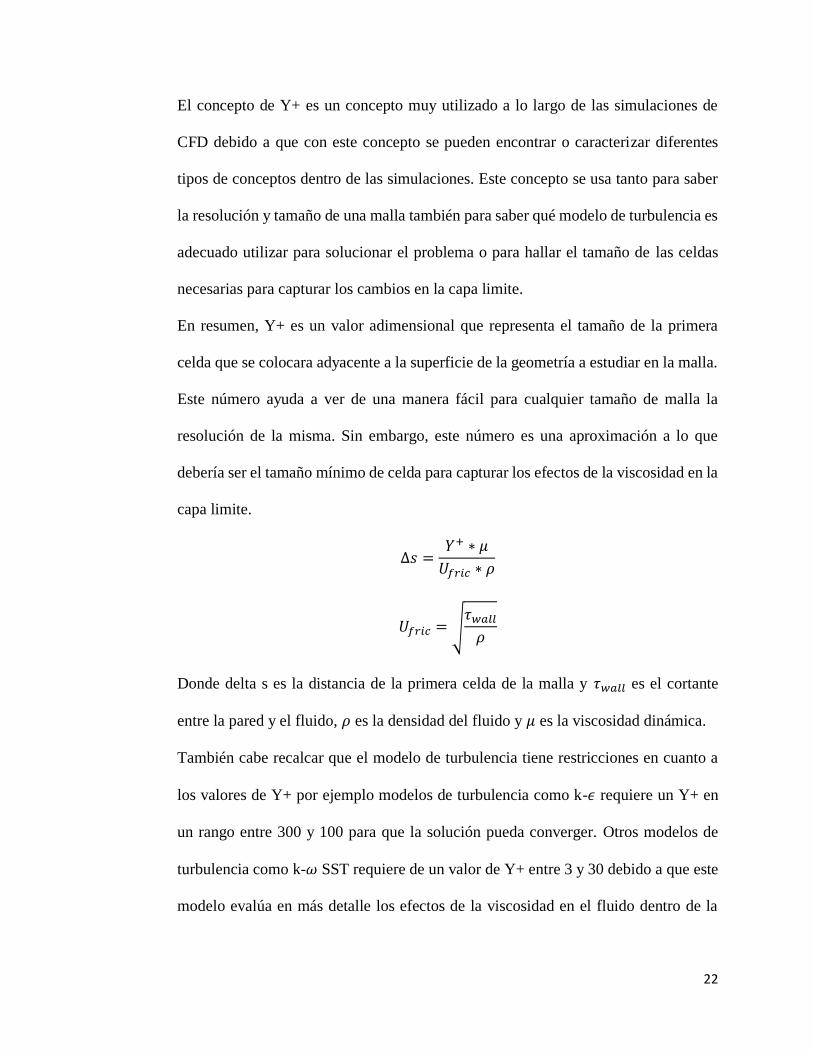
En resumen, Y+ es un valor adimensional que representa el tamaño de la primera
celda que se colocara adyacente a la superficie de la geometría a estudiar en la malla.
Este número ayuda a ver de una manera fácil para cualquier tamaño de malla la
resolución de la misma. Sin embargo, este número es una aproximación a lo que
debería ser el tamaño mínimo de celda para capturar los efectos de la viscosidad en la
capa limite.
Δ𝑠 =𝑌+ ∗ 𝜇
𝑈𝑓𝑟𝑖𝑐 ∗ 𝜌
𝑈𝑓𝑟𝑖𝑐 = √𝜏𝑤𝑎𝑙𝑙
𝜌
Donde delta s es la distancia de la primera celda de la malla y 𝜏𝑤𝑎𝑙𝑙 es el cortante
entre la pared y el fluido, 𝜌 es la densidad del fluido y 𝜇 es la viscosidad dinámica.
También cabe recalcar que el modelo de turbulencia tiene restricciones en cuanto a
los valores de Y+ por ejemplo modelos de turbulencia como k-𝜖 requiere un Y+ en
un rango entre 300 y 100 para que la solución pueda converger. Otros modelos de
turbulencia como k-𝜔 SST requiere de un valor de Y+ entre 3 y 30 debido a que este
modelo evalúa en más detalle los efectos de la viscosidad en el fluido dentro de la

23
capa limite por esta razón se necesita una mejor resolución dentro de la capa limite.
Un valor menor de Y+ significa que el tamaño de la primera celda es menor.
Imagen 19 Relación entre Y+ y la velocidad normalizada.
4. METODOLOGIA
4.1. Selección de perfiles aerodinámicos
La selección de los perfiles aerodinámicos fue en base a que al proyecto de grado de
Nicolás Rojas Aragón debido a que en este documento se estudiaron los diferentes tipos
de configuraciones de los perfiles aerodinámicos con diferentes ángulos de ataque y
diferentes longitudes para los perfiles.
Por esta razón se escogen los mismos perfiles aerodinámicos escogidos por Nicolás los
cuales son para el primer elemento el perfil aerodinámico EPPLER 423 y para el segundo
elemento el perfil aerodinámico NACA 6412. Estos perfiles se escogieron debido a su alta
curvatura en comparación con otros similares a estos.
24
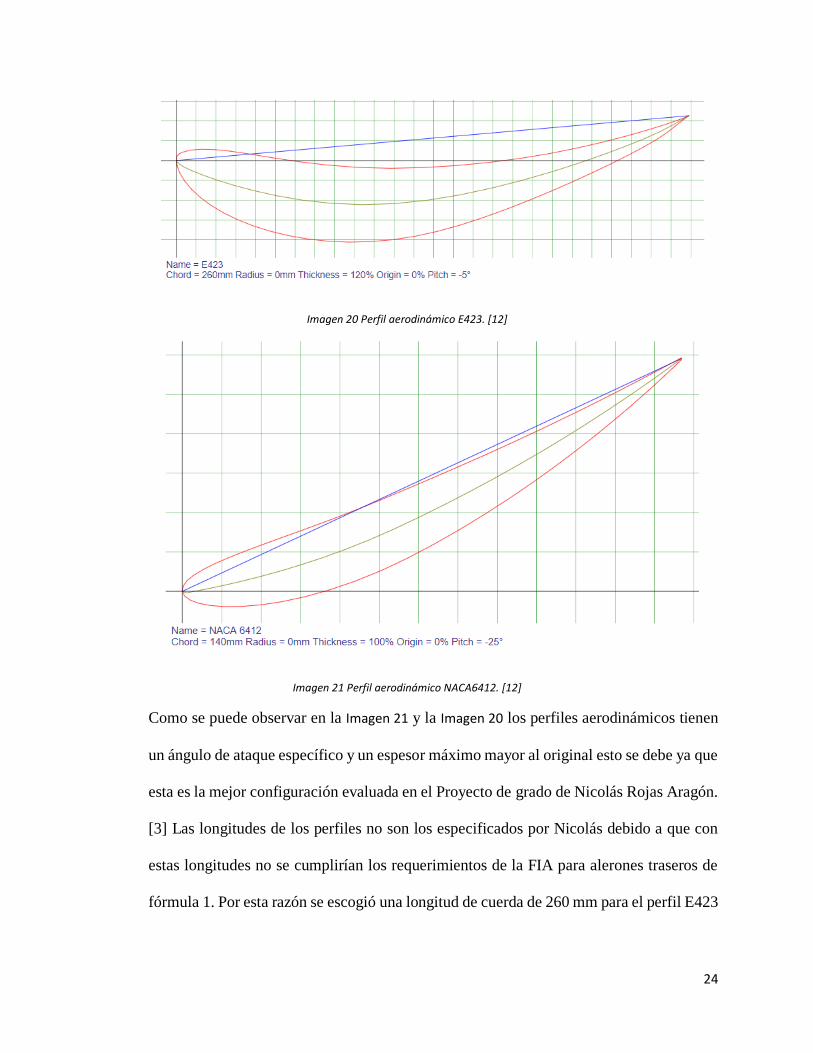
Imagen 20 Perfil aerodinámico E423. [12]
Imagen 21 Perfil aerodinámico NACA6412. [12]
Como se puede observar en la Imagen 21 y la Imagen 20 los perfiles aerodinámicos tienen
un ángulo de ataque específico y un espesor máximo mayor al original esto se debe ya que
esta es la mejor configuración evaluada en el Proyecto de grado de Nicolás Rojas Aragón.
[3] Las longitudes de los perfiles no son los especificados por Nicolás debido a que con
estas longitudes no se cumplirían los requerimientos de la FIA para alerones traseros de
fórmula 1. Por esta razón se escogió una longitud de cuerda de 260 mm para el perfil E423

25
y 140 mm para el perfil NACA 6412. Es importante tener en cuenta que el perfil del
segundo perfil aerodinámico no termina en punta sino en una punta rectangular.
Estas longitudes se deben a que se requiere aprovechar al máximo el volumen
especificado en la regulación de la FIA sobre la fórmula 1 que restringe la longitud de los
perfiles a una caja de 350 mm de largo y 200 mm de alto la cual se puede identificar como
un volumen de color verde con referencia 3.6.3. La diagonal generada por esta caja es de
una longitud de 400 mm aproximadamente. [13]
Imagen 22 Restricciones de volúmenes del alerón trasero. [13]
La configuración final de los dos elementos aerodinámicos está definida por la distancia
entre estos perfiles tanto vertical como horizontal y esta fue definida previamente en el
Proyecto de grado de Nicolás como 4% y 5% respectivamente de la longitud total de la
cuerda como se muestra en la Imagen 23.

26
Imagen 23 Distancias entre los elementos aerodinámicos.
Luego de realizar todos los cálculos de espaciado y de longitudes para cumplir las
restricciones estipuladas por la FIA se obtuvo una geometría de perfiles aerodinámicos
como se observa en la Imagen 24.
Imagen 24 Configuración final de los elementos aerodinámicos.
Luego se procedió a especificar el ancho de los perfiles aerodinámicos el cual también
está restringido por la regulación de la FIA como se observa en la Imagen 25. El volumen
autorizado para ubicar cualquier tipo de elemento aerodinámicos es el volumen de color
verde con referencia 3.6.3.
27
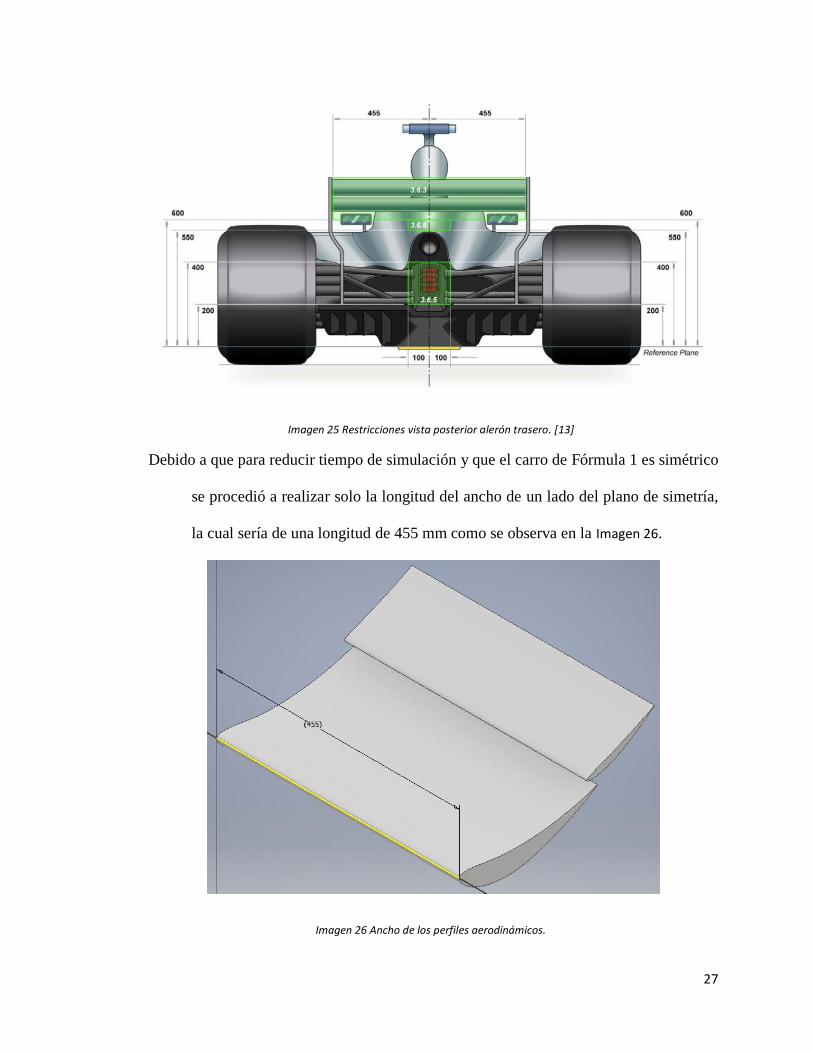
Imagen 25 Restricciones vista posterior alerón trasero. [13]
Debido a que para reducir tiempo de simulación y que el carro de Fórmula 1 es simétrico
se procedió a realizar solo la longitud del ancho de un lado del plano de simetría,
la cual sería de una longitud de 455 mm como se observa en la Imagen 26.
Imagen 26 Ancho de los perfiles aerodinámicos.
28
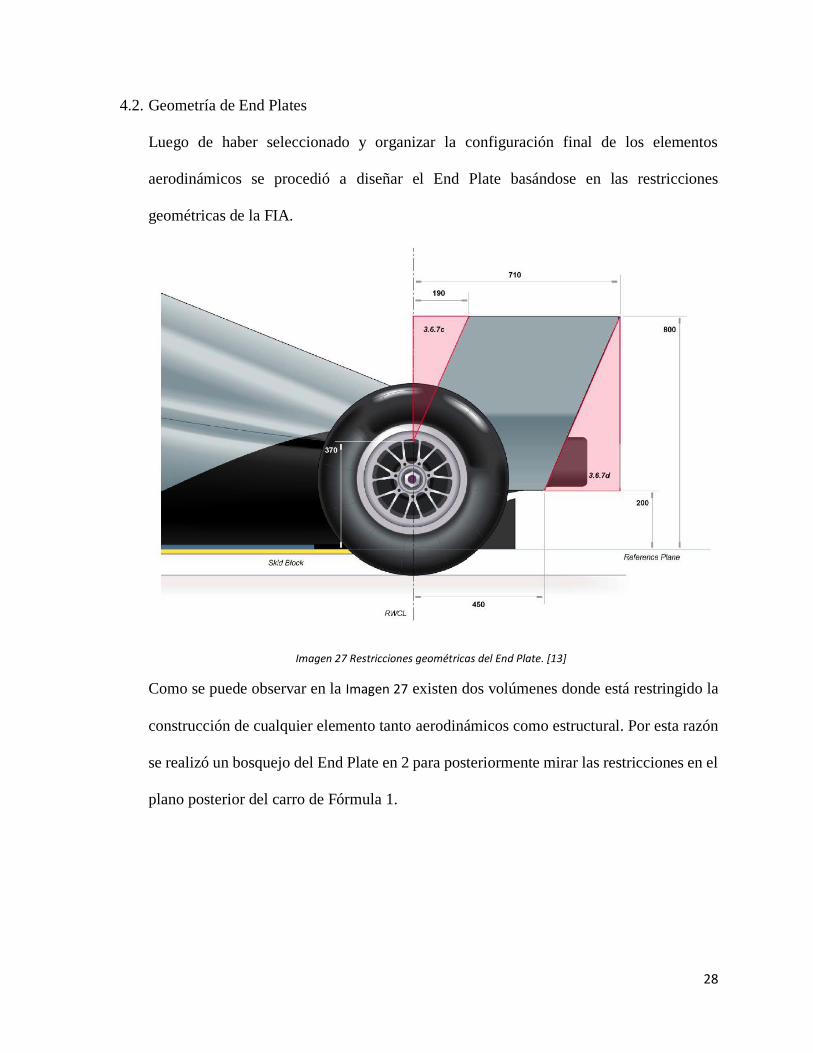
4.2. Geometría de End Plates
Luego de haber seleccionado y organizar la configuración final de los elementos
aerodinámicos se procedió a diseñar el End Plate basándose en las restricciones
geométricas de la FIA.
Imagen 27 Restricciones geométricas del End Plate. [13]
Como se puede observar en la Imagen 27 existen dos volúmenes donde está restringido la
construcción de cualquier elemento tanto aerodinámicos como estructural. Por esta razón
se realizó un bosquejo del End Plate en 2 para posteriormente mirar las restricciones en el
plano posterior del carro de Fórmula 1.
29
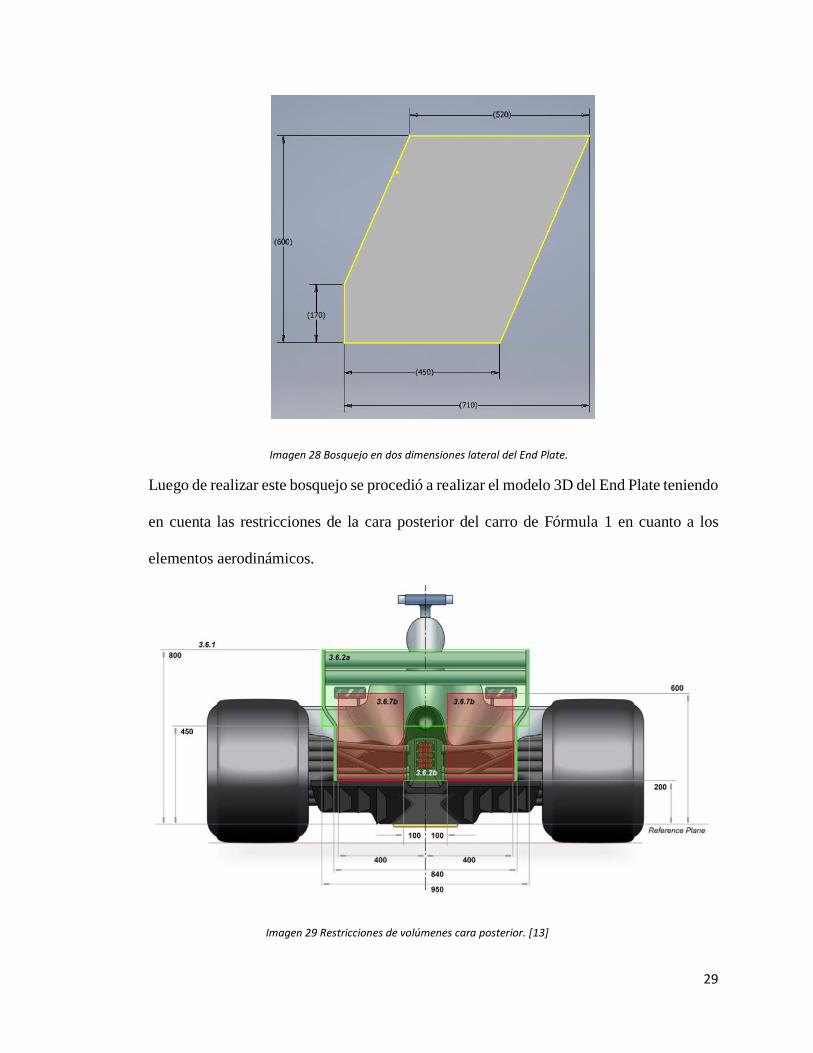
Imagen 28 Bosquejo en dos dimensiones lateral del End Plate.
Luego de realizar este bosquejo se procedió a realizar el modelo 3D del End Plate teniendo
en cuenta las restricciones de la cara posterior del carro de Fórmula 1 en cuanto a los
elementos aerodinámicos.
Imagen 29 Restricciones de volúmenes cara posterior. [13]

30
Como se puede observar en la Imagen 29 existe una restricción de la distancia entre el End
Plate y el plano de simetría que varía a través de la altura con respecto al plano de
referencia. Este cambio se ve a una altura de 450 mm con respecto al plano de referencia.
Para este cambio se realizó una curvatura de una altura de 80 mm como se observa en la
Imagen 30.
Imagen 30 Vista frontal cambio de ancho del End Plate.
Al tomar todas las restricciones de la FIA en cuenta y al unir los perfiles aerodinamicos con el End
Plate resultante se puede observar una geometria aproximada a la utilizada por los carros de
Formula 1 como se muestra en la Imagen 31. A la cual se procedera a realizar las simulaciones
para encontrar las propiedades aerodinamicas de la geometria.

31
Imagen 31 Geometría final de los perfiles y el End Plate.
4.3. Malla superficial de la geometría
Para la malla de la geometría se utilizará el programa Pointwise debido a su fácil manejo
y a que en este programa se pueden evaluar fácilmente variables de las celdas como la
relación de aspecto y el skewness que son variables que si no se controlan la solución una
vez en la simulación puede divergir fácilmente.
Por esta razón se debe exportar el modelo de la geometría en el formato .STEP para poder
obtener la geometría en el programa de Pointwise. Luego de esto se procede a crear las
mallas sobre las superficies de la geometría.
Imagen 32 Malla superficial de la geometría.
32
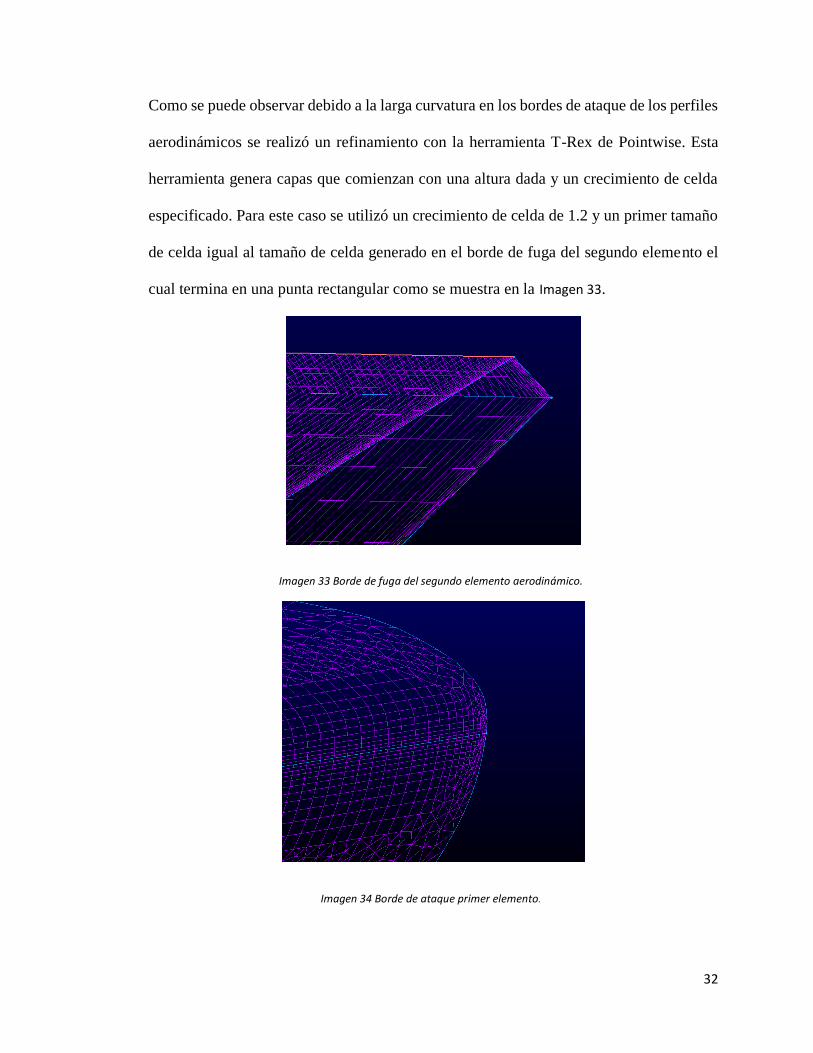
Como se puede observar debido a la larga curvatura en los bordes de ataque de los perfiles
aerodinámicos se realizó un refinamiento con la herramienta T-Rex de Pointwise. Esta
herramienta genera capas que comienzan con una altura dada y un crecimiento de celda
especificado. Para este caso se utilizó un crecimiento de celda de 1.2 y un primer tamaño
de celda igual al tamaño de celda generado en el borde de fuga del segundo elemento el
cual termina en una punta rectangular como se muestra en la Imagen 33.
Imagen 33 Borde de fuga del segundo elemento aerodinámico.
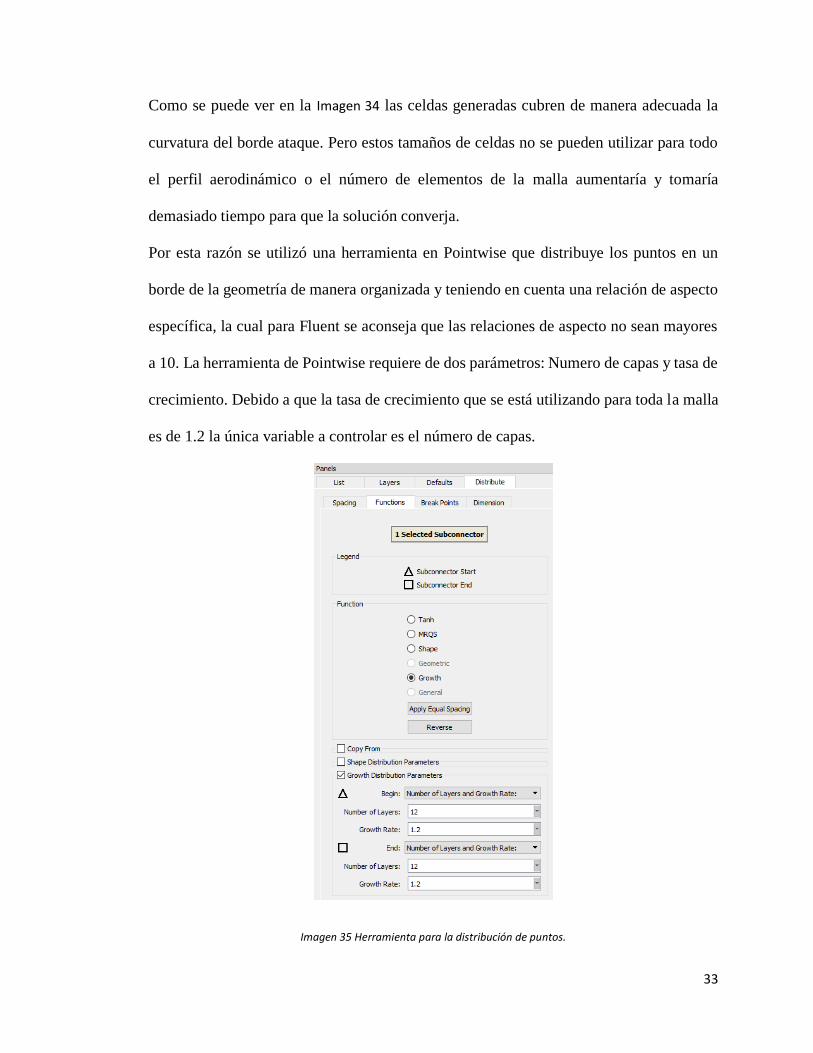
Imagen 34 Borde de ataque primer elemento.
33
Como se puede ver en la Imagen 34 las celdas generadas cubren de manera adecuada la
curvatura del borde ataque. Pero estos tamaños de celdas no se pueden utilizar para todo
el perfil aerodinámico o el número de elementos de la malla aumentaría y tomaría
demasiado tiempo para que la solución converja.
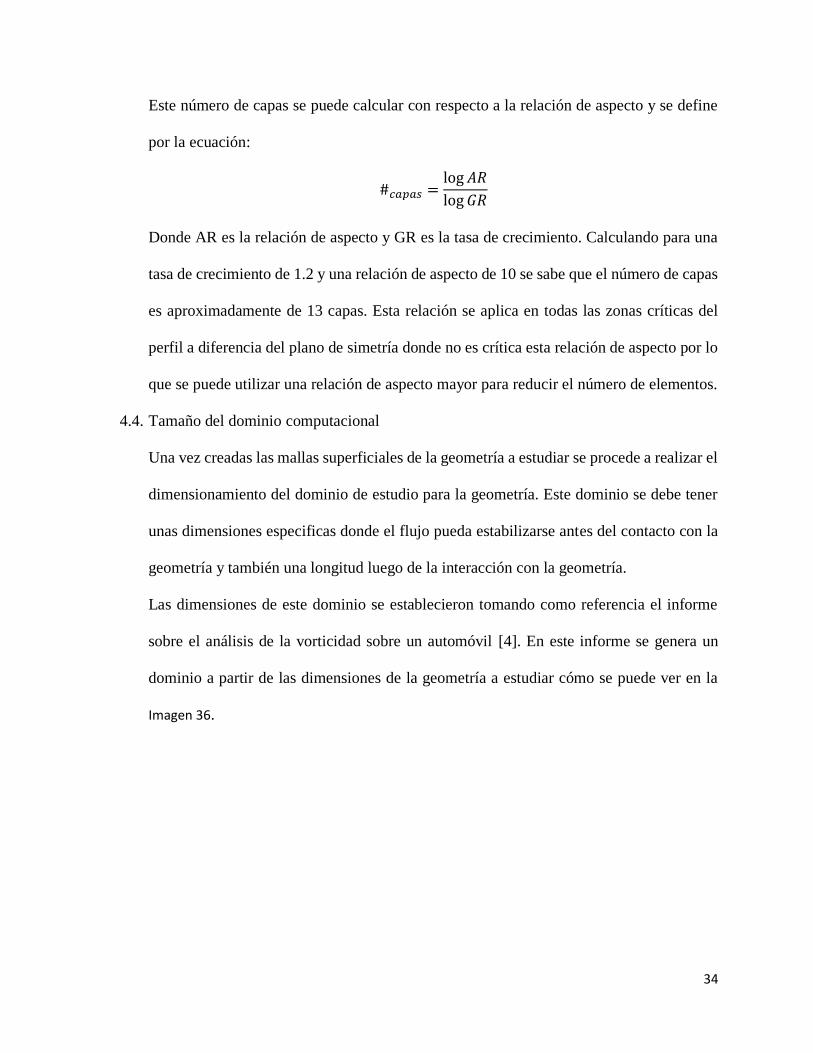
Por esta razón se utilizó una herramienta en Pointwise que distribuye los puntos en un
borde de la geometría de manera organizada y teniendo en cuenta una relación de aspecto
específica, la cual para Fluent se aconseja que las relaciones de aspecto no sean mayores
a 10. La herramienta de Pointwise requiere de dos parámetros: Numero de capas y tasa de
crecimiento. Debido a que la tasa de crecimiento que se está utilizando para toda la malla
es de 1.2 la única variable a controlar es el número de capas.
Imagen 35 Herramienta para la distribución de puntos.
34
Este número de capas se puede calcular con respecto a la relación de aspecto y se define
por la ecuación:
#𝑐𝑎𝑝𝑎𝑠 =log 𝐴𝑅
log 𝐺𝑅
Donde AR es la relación de aspecto y GR es la tasa de crecimiento. Calculando para una
tasa de crecimiento de 1.2 y una relación de aspecto de 10 se sabe que el número de capas
es aproximadamente de 13 capas. Esta relación se aplica en todas las zonas críticas del
perfil a diferencia del plano de simetría donde no es crítica esta relación de aspecto por lo
que se puede utilizar una relación de aspecto mayor para reducir el número de elementos.
4.4. Tamaño del dominio computacional
Una vez creadas las mallas superficiales de la geometría a estudiar se procede a realizar el
dimensionamiento del dominio de estudio para la geometría. Este dominio se debe tener
unas dimensiones especificas donde el flujo pueda estabilizarse antes del contacto con la
geometría y también una longitud luego de la interacción con la geometría.
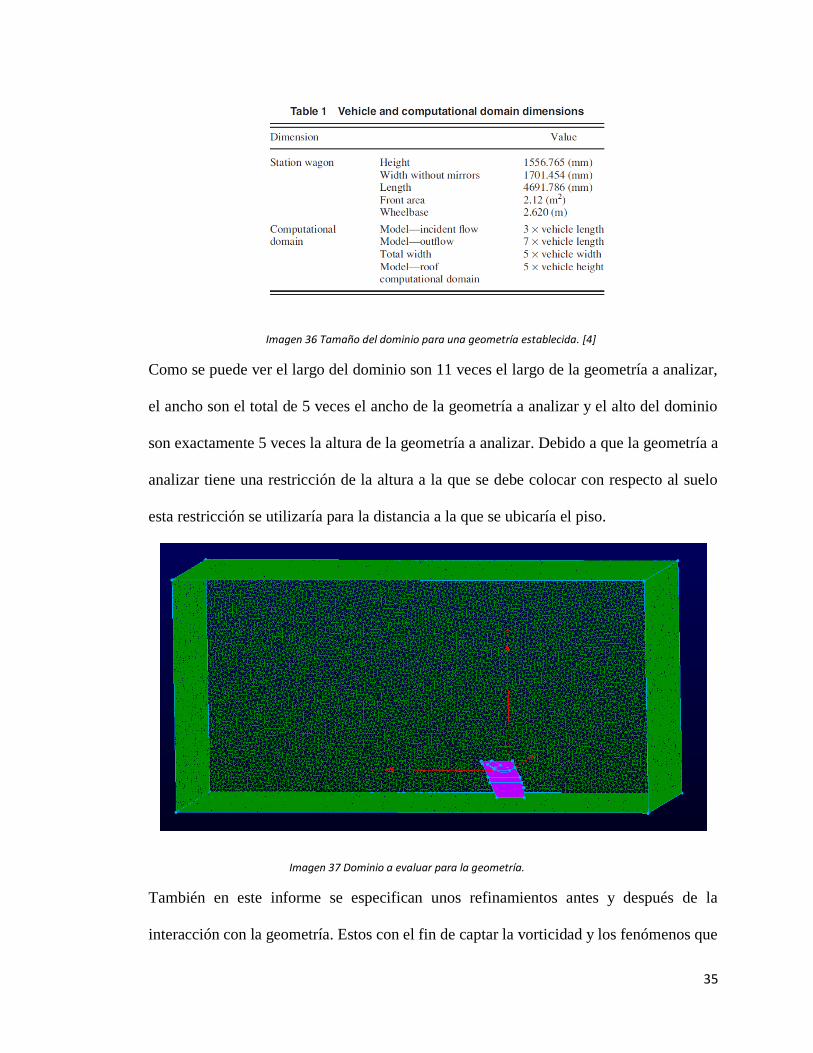
Las dimensiones de este dominio se establecieron tomando como referencia el informe
sobre el análisis de la vorticidad sobre un automóvil [4]. En este informe se genera un
dominio a partir de las dimensiones de la geometría a estudiar cómo se puede ver en la
Imagen 36.
35
Imagen 36 Tamaño del dominio para una geometría establecida. [4]
Como se puede ver el largo del dominio son 11 veces el largo de la geometría a analizar,
el ancho son el total de 5 veces el ancho de la geometría a analizar y el alto del dominio
son exactamente 5 veces la altura de la geometría a analizar. Debido a que la geometría a
analizar tiene una restricción de la altura a la que se debe colocar con respecto al suelo
esta restricción se utilizaría para la distancia a la que se ubicaría el piso.
Imagen 37 Dominio a evaluar para la geometría.
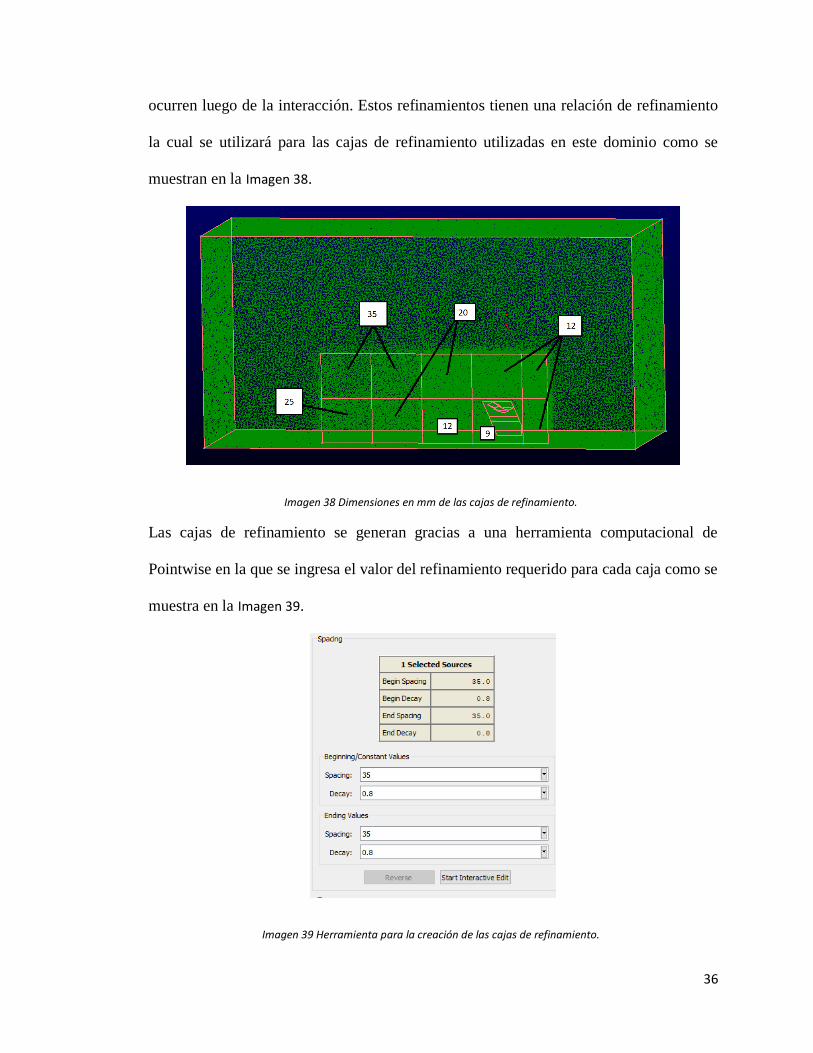
También en este informe se especifican unos refinamientos antes y después de la
interacción con la geometría. Estos con el fin de captar la vorticidad y los fenómenos que
36
ocurren luego de la interacción. Estos refinamientos tienen una relación de refinamiento
la cual se utilizará para las cajas de refinamiento utilizadas en este dominio como se
muestran en la Imagen 38.
Imagen 38 Dimensiones en mm de las cajas de refinamiento.
Las cajas de refinamiento se generan gracias a una herramienta computacional de
Pointwise en la que se ingresa el valor del refinamiento requerido para cada caja como se
muestra en la Imagen 39.
Imagen 39 Herramienta para la creación de las cajas de refinamiento.

37
4.5. Calculo y captura de la capa limite
Luego de establecer y crear las mallas superficiales y el dominio de estudio se debe generar
la malla 3D para esto se utiliza la misma herramienta utilizada anteriormente para la
generación de celdas rectangular con un crecimiento especifico T-Rex. Esta herramienta
generara una serie de prismas alrededor de la geometría necesarios para atrapar la capa
limite. Para esto se necesita de saber el espesor de la capa limite, ya que esto no se puede
saber con exactitud pues se hace una aproximación con respecto a el espesor de la capa
límite de una placa plana con la misma longitud y condiciones de entrada [14].
𝑅𝑒 =𝜌 ∗ 𝑈∞ ∗ 𝐿
𝜇
𝑅𝑒 = 1600000
𝛿𝑠 =0.16 ∗ 𝐿
(𝑅𝑒)17
𝛿𝑠 = 8.3153 𝑚𝑚
Siendo L la longitud total de la cuerda, Re es el número Reynolds y 𝛿𝑠 el espesor máximo
de la capa limite. Este cálculo es el cálculo aproximado de la capa límite de una placa
plana con un Reynolds establecido. La velocidad del flujo inicial se define como 60 m/s.
Luego de esto se calcula la cantidad de elemento necesarios para cubrir la capa limite y
esto se realiza utilizando el Y+. El Y+ que se utilizara será de 10 debido a que este está en
el rango del método de turbulencia a utilizar k-𝜔 SST y es un valor que no es de un tamaño
demasiado pequeño para generar que la cantidad de elementos aumente drásticamente.
Con las ecuaciones previamente explicadas y con la ayuda de la herramienta
computacional de Pointwise se calculó el tamaño de la primera celda para Y+ dado con
las condiciones de longitud de cuerda y velocidad de entrada estipuladas.

38
Imagen 40 Calculo de primera celda con Y+ de 10. [15]
El cálculo de la altura de la primera celda en la capa limite es de Δ𝑠 = 0.0608302 𝑚𝑚,
esta altura debe de ingresarse en la herramienta computacional T-Rex de Pointwise para
que esta genere los prismas respectivos sobre la superficie de la geometría. También se
debe calcular la cantidad de elementos se necesitan para que los prismas generados atrapen
por completo la capa límite del perfil aerodinámico. Este cálculo se realiza con una tasa
de crecimiento igual a la de la malla superficial de 1.2 como se muestra en la Imagen 41.

39
Imagen 41 Calculo de la cantidad de elementos necesarios.
Como se puede observar en la Imagen 41 el número mínimo de elementos necesarios para
capturar la capa limite es de 19 y por esta razón en la herramienta computacional de
Pointwise se debe especificar la creación de 19 capas de prismas con una altura inicial de
prisma de 0.06083 mm.

40
Imagen 42 Herramienta computacional de T-Rex.
Imagen 43 Generación de capa de prismas en el plano de simetría.
Como se puede observar en la Imagen 43 la generación de los prismas se da sobre toda la
superficie de la geometría para capturar la capa limite. Lo ideal es que se generen las 19

41
capas necesarias, pero existen casos donde esto no es posible por ejemplo en donde se
intersecan las capas del primer elemento y el segundo elemento. En este punto se necesita
dejar un espacio para la generación de celdas que no tenga un skewness alto. Por esta
razón se utiliza una configuración avanzada de la herramienta computacional llamada
“Collision Buffer” y se le da un valor de 2 para que deje el espacio necesario para la
generación de las demás celdas.
Una vez se genera la malla 3D con todas las celdas necesarias dentro de este dominio, se
procede a evaluar si la malla generada tiene parámetros de geometría aceptables para pasar
a la simulación. Se estableció que para este tipo de malla un equiangle skewness menor a
0.98 y una relación de aspecto menor a 1000 con máximo una celda superando estos
parámetros, pero no superando 0.999 y 5000 respectivamente se obtenía que la solución
converge calculando de manera correcta las condiciones de frontera.
4.6. Condiciones de frontera
Dentro de este dominio se encuentran 6 caras principales a las cuales se les conocerán
como condiciones de frontera. Estas condiciones de frontera son importantes para la
solución de la simulación debido a que estas afectan directamente nuestra simulación y
otras condiciones de frontera como la de entrada son esenciales para la fácil convergencia
de la simulación. Por esta razón se deben asignar de una manera adecuada y realizar los
cálculos necesarios para estas condiciones de frontera.
Para la salida se utiliza una condición de frontera de salida de presión ya que esta equilibra
el flujo en la salida y ayuda en la simulación.
Para la pared superior y opuesta al plano de simetría se utilizó una condición de pared con
ningún cortante entre la superficie y el fluido.
42
Para el piso se utilizó una condición de pared móvil, esta pared se mueve en la dirección
del flujo y con la misma velocidad asemejando un piso en nuestro dominio.
Para el plano de simetría se utilizó una condición de simetría, como su nombre lo dice
asume que el dominio real ha sido cortado sobre este plano dividiéndolo en la mitad.
Para la condición de entrada se utilizó una entrada de velocidad con velocidad de 60 m/s
debido a que como se está velocidad es la velocidad media de un carro de Formula 1 en
una pista como Silverstone. Esta condición de nuestro dominio requiere que se calculen
condiciones iniciales adicionales que posee el flujo para que la solución converja de
manera adecuada.
Las condiciones que se deben calcular son las de k o energía de turbulencia y 𝜔 o tasa de
disipación especifica.
Para la energía de turbulencia se utiliza la fórmula [16]:
𝑘 =3
2∗ (𝑈 ∗ 𝐼)2
Donde U es la velocidad del fluido e I es la intensidad de turbulencia. Este valor de
intensidad de turbulencia se aproxima a un valor de 0.3% para flujos donde el flujo se
origina de un flujo estacionario de baja turbulencia.
𝑘 = 0.0486𝑚2
𝑠2
Para la tasa de disipación de energía se utiliza la fórmula [16]:
𝜔 = 𝐶𝜇
−14 ∗ (
√𝑘
𝑙)
𝑙 = 0.4 ∗ 𝛿𝑠

43
Donde 𝛿𝑠 es el espesor de la capa limite, l es la escala de longitud de la turbulencia, k es
la energía de turbulencia y 𝐶𝜇 es una constante del modelo de turbulencia que usualmente
es de 0.09 [16].
𝜔 = 121.00891
𝑠
4.7. Convergencia de mallas
Debido a que el costo computacional es un parámetro importante en las simulaciones de
CFD se necesita disminuir este lo mayor posible para lograr una optimización entre los
valores encontrados y el tiempo de convergencia. Esto se puede analizar realizando un
análisis de convergencia de mallas. La idea de este análisis es la de encontrar el tamaño
de malla que mejor se aproxime a un valor de coeficientes aerodinámicos con un costo
computacional razonable.
Primero se necesitan realizar varias mallas con diferentes resoluciones por lo tanto el
número de elementos cambiara y así el tiempo de convergencia. Este se realizó con una
parametrización a partir del valor de Y+. Cambiando el Y+ de la malla y en una relación
igual los demás parámetros de distribución de las mallas como se puede ver en Imagen 44.
Imagen 44 Parametrización de la convergencia de mallas.
44
Luego de haber realizado las diferentes mallas se deben revisar los resultados de las
simulaciones y comparar cual es el resultado que se vuelve optimo evaluando el tiempo
computacional y el error porcentual.
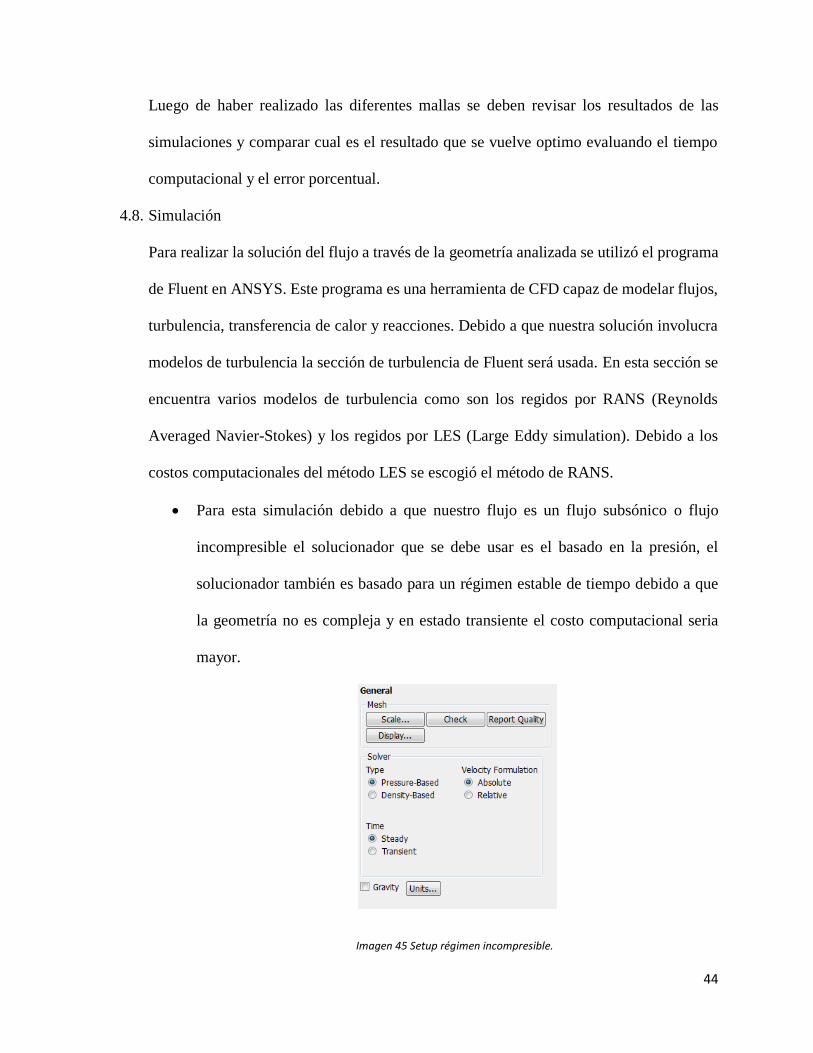
4.8. Simulación
Para realizar la solución del flujo a través de la geometría analizada se utilizó el programa
de Fluent en ANSYS. Este programa es una herramienta de CFD capaz de modelar flujos,
turbulencia, transferencia de calor y reacciones. Debido a que nuestra solución involucra
modelos de turbulencia la sección de turbulencia de Fluent será usada. En esta sección se
encuentra varios modelos de turbulencia como son los regidos por RANS (Reynolds
Averaged Navier-Stokes) y los regidos por LES (Large Eddy simulation). Debido a los
costos computacionales del método LES se escogió el método de RANS.
• Para esta simulación debido a que nuestro flujo es un flujo subsónico o flujo
incompresible el solucionador que se debe usar es el basado en la presión, el
solucionador también es basado para un régimen estable de tiempo debido a que
la geometría no es compleja y en estado transiente el costo computacional seria
mayor.
Imagen 45 Setup régimen incompresible.
45
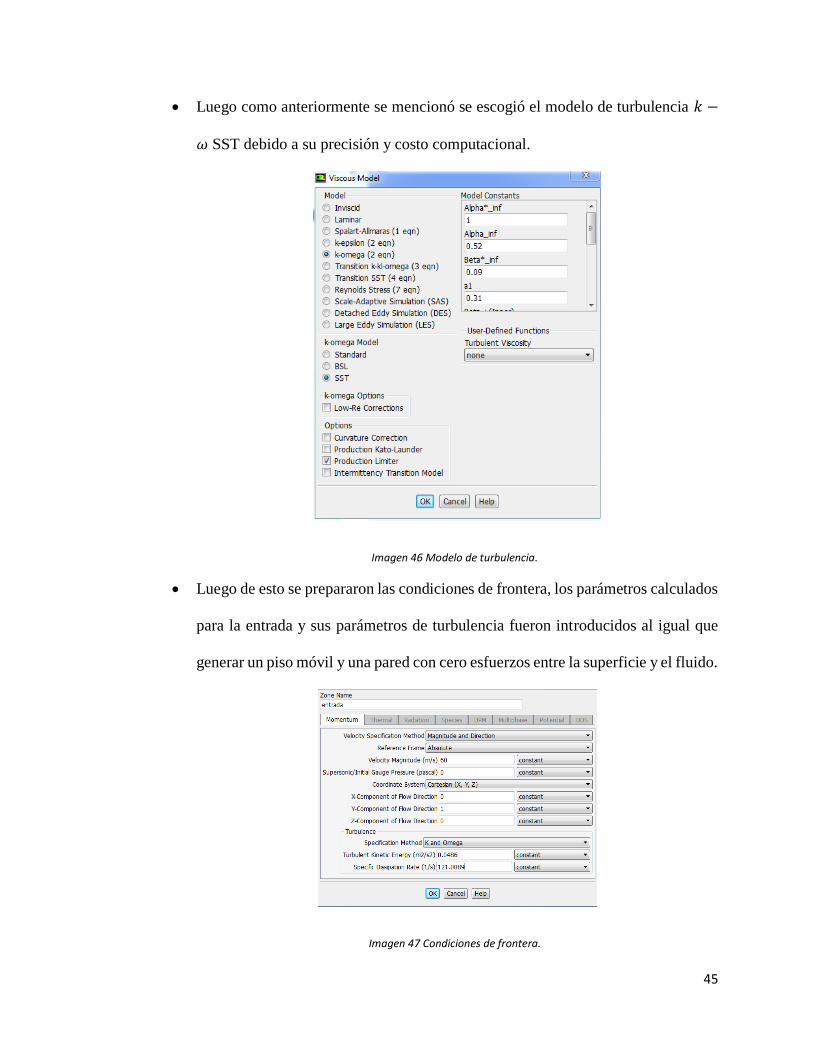
• Luego como anteriormente se mencionó se escogió el modelo de turbulencia 𝑘 −
𝜔 SST debido a su precisión y costo computacional.
Imagen 46 Modelo de turbulencia.
• Luego de esto se prepararon las condiciones de frontera, los parámetros calculados
para la entrada y sus parámetros de turbulencia fueron introducidos al igual que
generar un piso móvil y una pared con cero esfuerzos entre la superficie y el fluido.
Imagen 47 Condiciones de frontera.

46
• Para los cálculos de los coeficientes aerodinámicos de la solución se insertaron
valores importantes como la longitud de cuerda, el área de referencia y la velocidad
de la entrada.
Imagen 48 Valores de referencia coeficientes aerodinámicos.
• Así mismo en los métodos de solución se utilizó un esquema SIMPLE con métodos
de discretización espaciales de segundo orden a barlovento.
Imagen 49 Acople de presión y velocidad.
47
4.9. Diseño del experimento
Debido a que se deben comparar los resultados de diferentes configuraciones de End
Plates para los alerones seleccionados se deben realizar simulaciones para diferentes tipos
de End Plates estos se basan en:
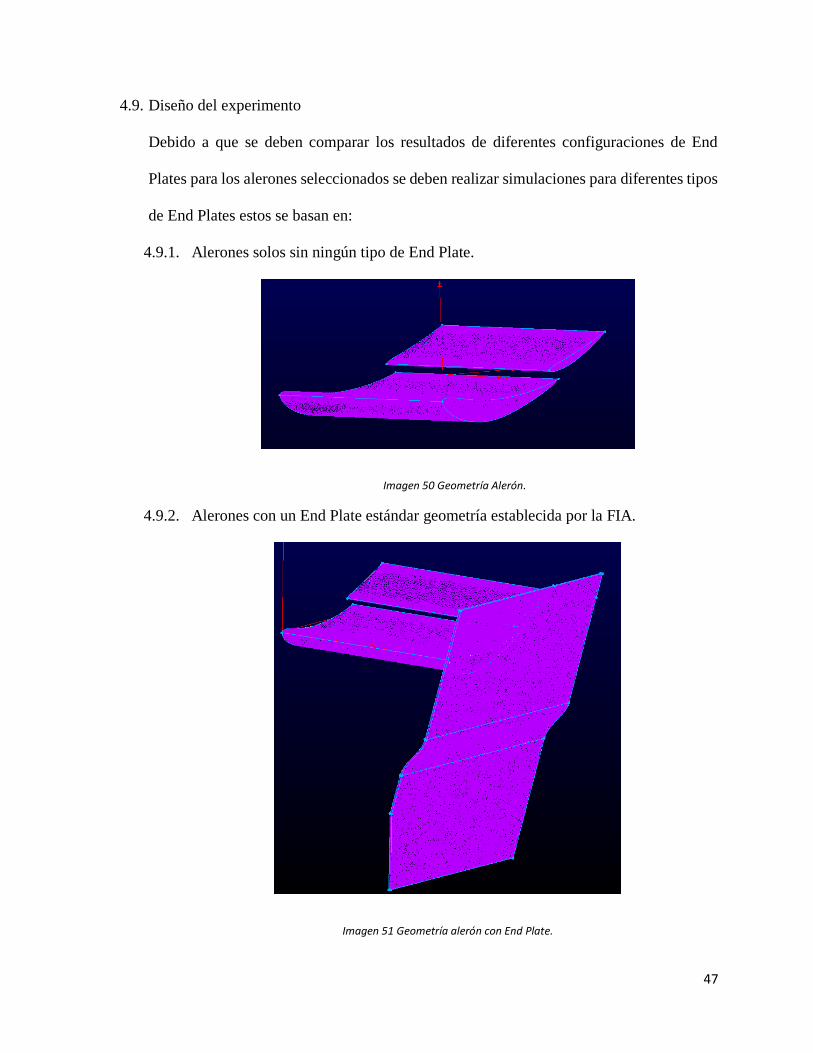
4.9.1. Alerones solos sin ningún tipo de End Plate.
Imagen 50 Geometría Alerón.
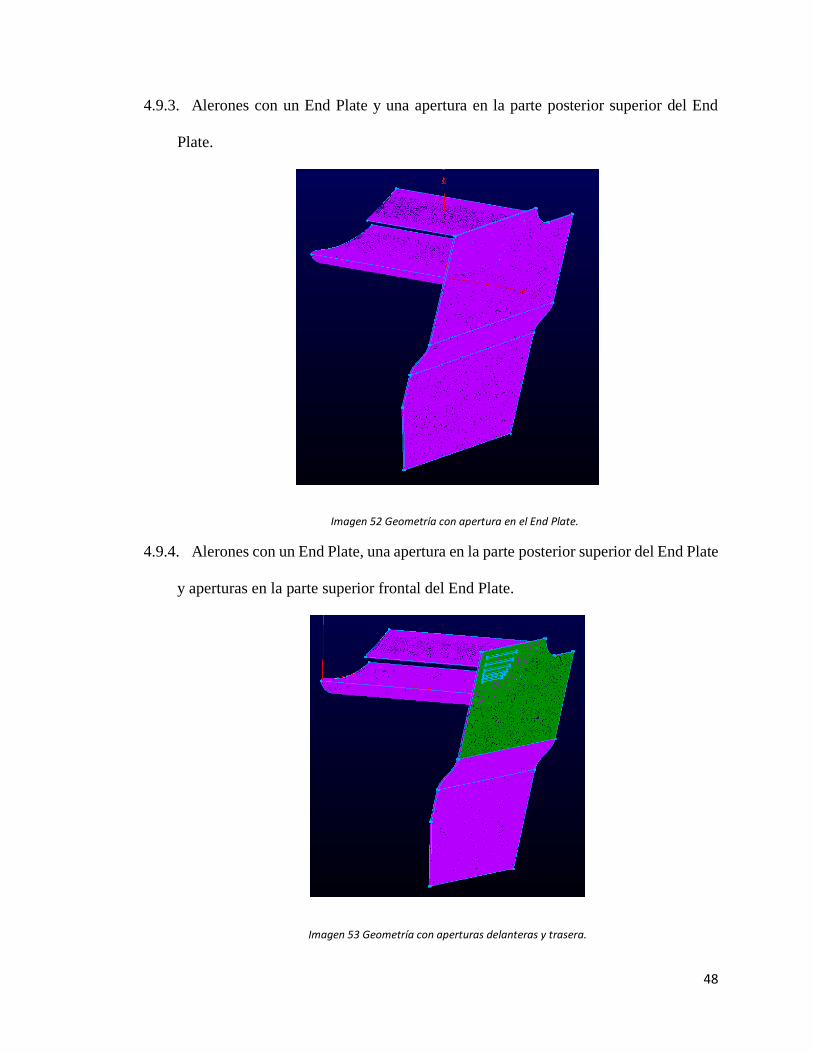
4.9.2. Alerones con un End Plate estándar geometría establecida por la FIA.
Imagen 51 Geometría alerón con End Plate.
48
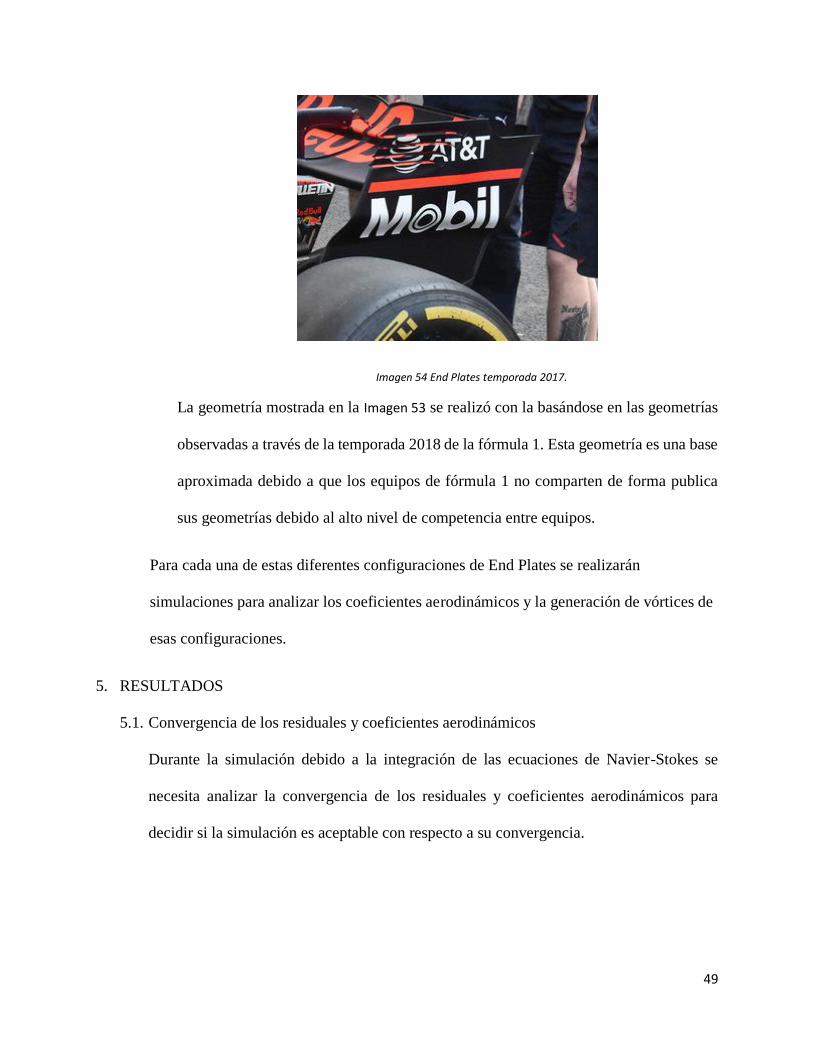
4.9.3. Alerones con un End Plate y una apertura en la parte posterior superior del End
Plate.
Imagen 52 Geometría con apertura en el End Plate.
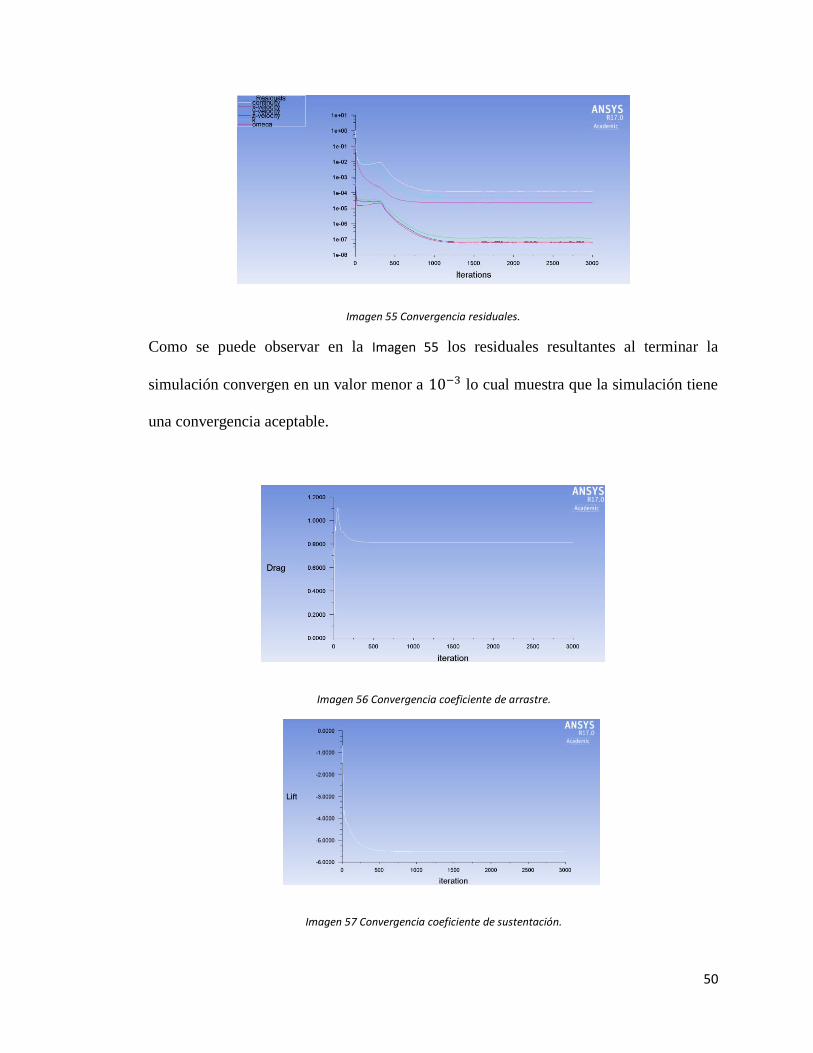
4.9.4. Alerones con un End Plate, una apertura en la parte posterior superior del End Plate
y aperturas en la parte superior frontal del End Plate.
Imagen 53 Geometría con aperturas delanteras y trasera.
49
Imagen 54 End Plates temporada 2017.
La geometría mostrada en la Imagen 53 se realizó con la basándose en las geometrías
observadas a través de la temporada 2018 de la fórmula 1. Esta geometría es una base
aproximada debido a que los equipos de fórmula 1 no comparten de forma publica
sus geometrías debido al alto nivel de competencia entre equipos.
Para cada una de estas diferentes configuraciones de End Plates se realizarán
simulaciones para analizar los coeficientes aerodinámicos y la generación de vórtices de
esas configuraciones.
5. RESULTADOS
5.1. Convergencia de los residuales y coeficientes aerodinámicos
Durante la simulación debido a la integración de las ecuaciones de Navier-Stokes se
necesita analizar la convergencia de los residuales y coeficientes aerodinámicos para
decidir si la simulación es aceptable con respecto a su convergencia.
50
Imagen 55 Convergencia residuales.
Como se puede observar en la Imagen 55 los residuales resultantes al terminar la
simulación convergen en un valor menor a 10−3 lo cual muestra que la simulación tiene
una convergencia aceptable.
Imagen 56 Convergencia coeficiente de arrastre.
Imagen 57 Convergencia coeficiente de sustentación.

51
5.2. Análisis de convergencia
Luego de realizar las simulaciones de los diferentes tamaños de la malla del alerón sin End
Plates se obtuvieron los siguientes coeficientes aerodinámicos.
Imagen 58 Valores del coeficiente de arrastre análisis de convergencia.
Luego se procedió a evaluar el coeficiente de arrastre comprándolo con el número de
elementos de la malla para escoger el tamaño de malla adecuado para utilizar en las mallas
del experimento como se observa en la Imagen 59.
Imagen 59 Resultados análisis de convergencia.
Como se puede observar a medida que se aumenta el número de elementos el valor del
coeficiente de arrastre converge hacia un valor, debido a que llegar a este valor exacto
tomaría un alto costo computacional se puede aproximar o tomar una malla de menor
tamaño para este experimento. El tamaño de malla escogido es el de un Y+ de 10 debido
52
a que su número de elementos es aceptable para este tipo de simulación y el error en el
coeficiente de arrastre también es aceptable en comparación con mallas de menor error.
5.3. Coeficientes de arrastre y sustentación
Debido a que una los efectos más importantes de los End Plates es su efecto en los
coeficientes aerodinámicos se deben analizar los coeficientes aerodinámicos para las
diferentes configuraciones de End Plates. Se comparan los coeficientes de arrastre y
sustentación con un cambio porcentual tomando como referencia el alerón original sin
ningún tipo de End Plate.
Imagen 60 Comparación de coeficientes aerodinámicos.
Como se puede observar en la Imagen 60, claramente se ve un cambio en los coeficientes
entre las geometrías sin End Plates y Con End Plates con una reducción del arrastre de un
7.99% mientras que la sustentación aumento en un 22.14%.
Imagen 61 Comparación entre la geometría con y sin End Plate
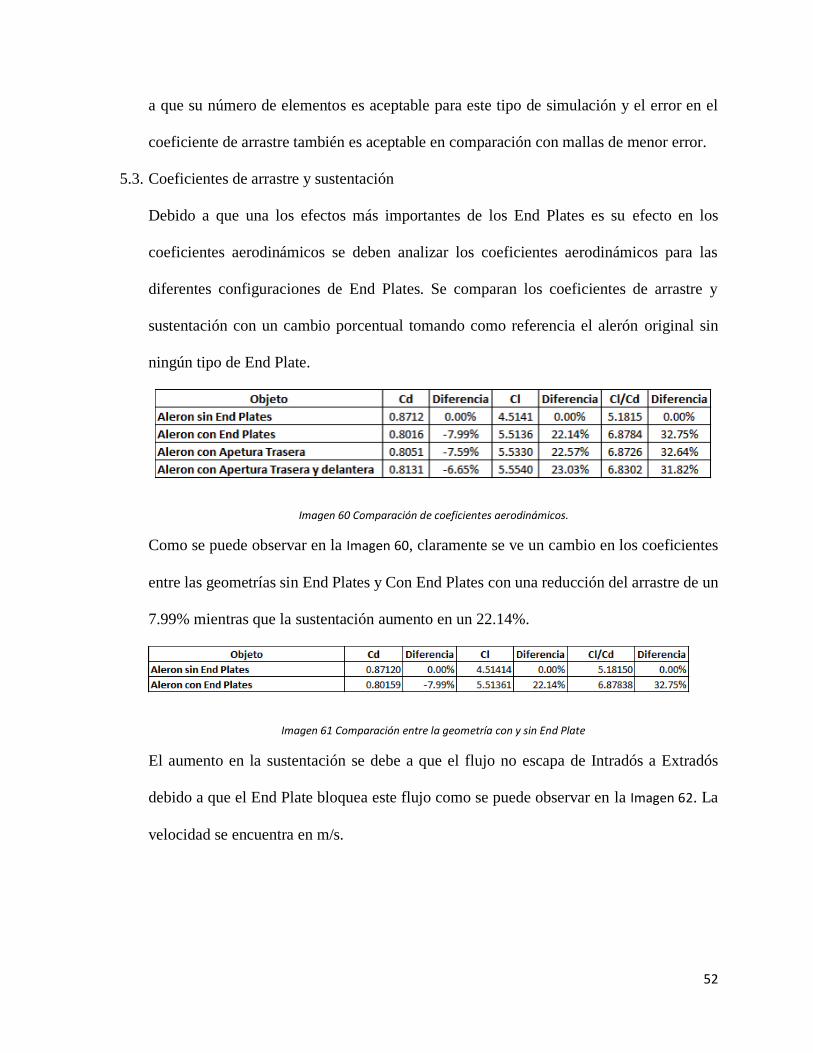
El aumento en la sustentación se debe a que el flujo no escapa de Intradós a Extradós
debido a que el End Plate bloquea este flujo como se puede observar en la Imagen 62. La
velocidad se encuentra en m/s.
53
Imagen 62 Comparación en el flujo del fluido Con End Plate (izquierda) y sin End Plate (derecha).
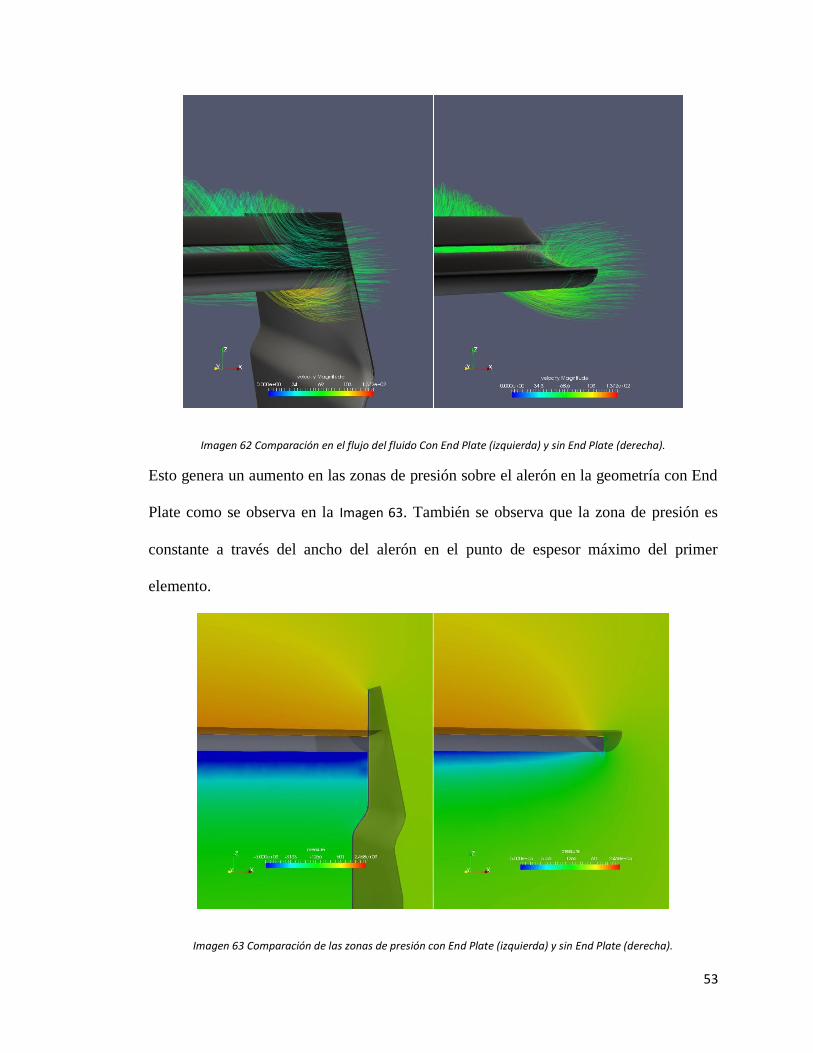
Esto genera un aumento en las zonas de presión sobre el alerón en la geometría con End
Plate como se observa en la Imagen 63. También se observa que la zona de presión es
constante a través del ancho del alerón en el punto de espesor máximo del primer
elemento.
Imagen 63 Comparación de las zonas de presión con End Plate (izquierda) y sin End Plate (derecha).
54
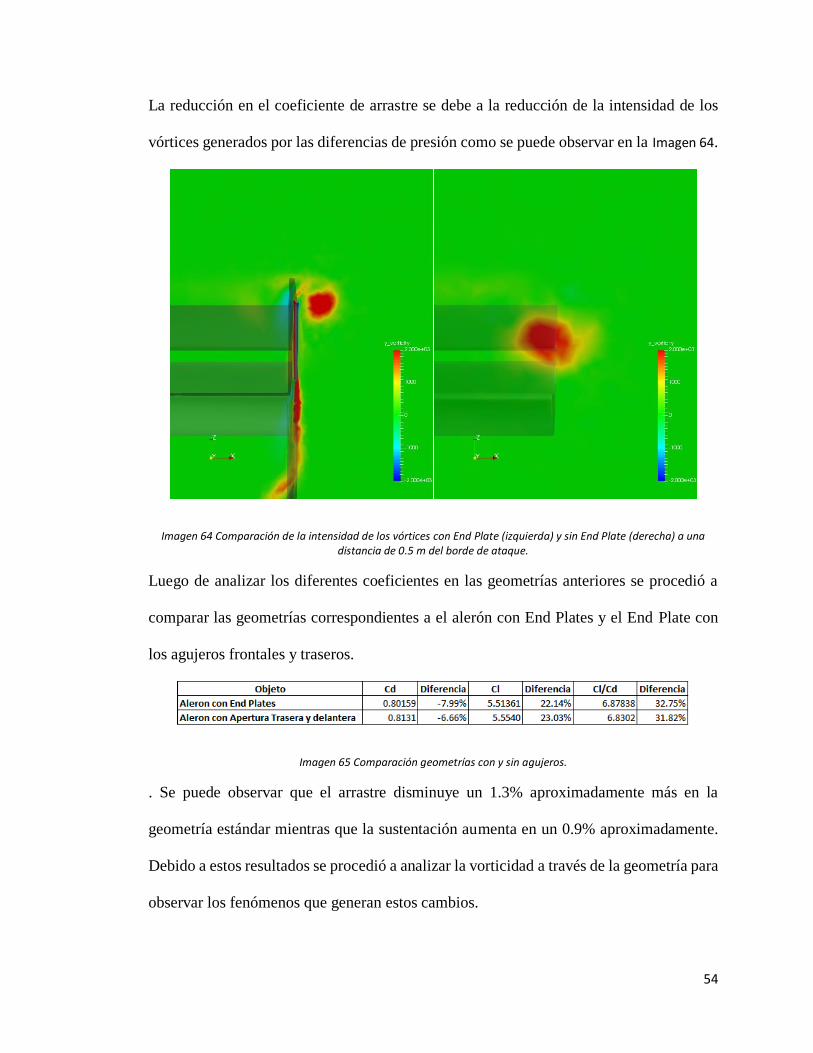
La reducción en el coeficiente de arrastre se debe a la reducción de la intensidad de los
vórtices generados por las diferencias de presión como se puede observar en la Imagen 64.
Imagen 64 Comparación de la intensidad de los vórtices con End Plate (izquierda) y sin End Plate (derecha) a una distancia de 0.5 m del borde de ataque.
Luego de analizar los diferentes coeficientes en las geometrías anteriores se procedió a
comparar las geometrías correspondientes a el alerón con End Plates y el End Plate con
los agujeros frontales y traseros.
Imagen 65 Comparación geometrías con y sin agujeros.
. Se puede observar que el arrastre disminuye un 1.3% aproximadamente más en la
geometría estándar mientras que la sustentación aumenta en un 0.9% aproximadamente.
Debido a estos resultados se procedió a analizar la vorticidad a través de la geometría para
observar los fenómenos que generan estos cambios.
55
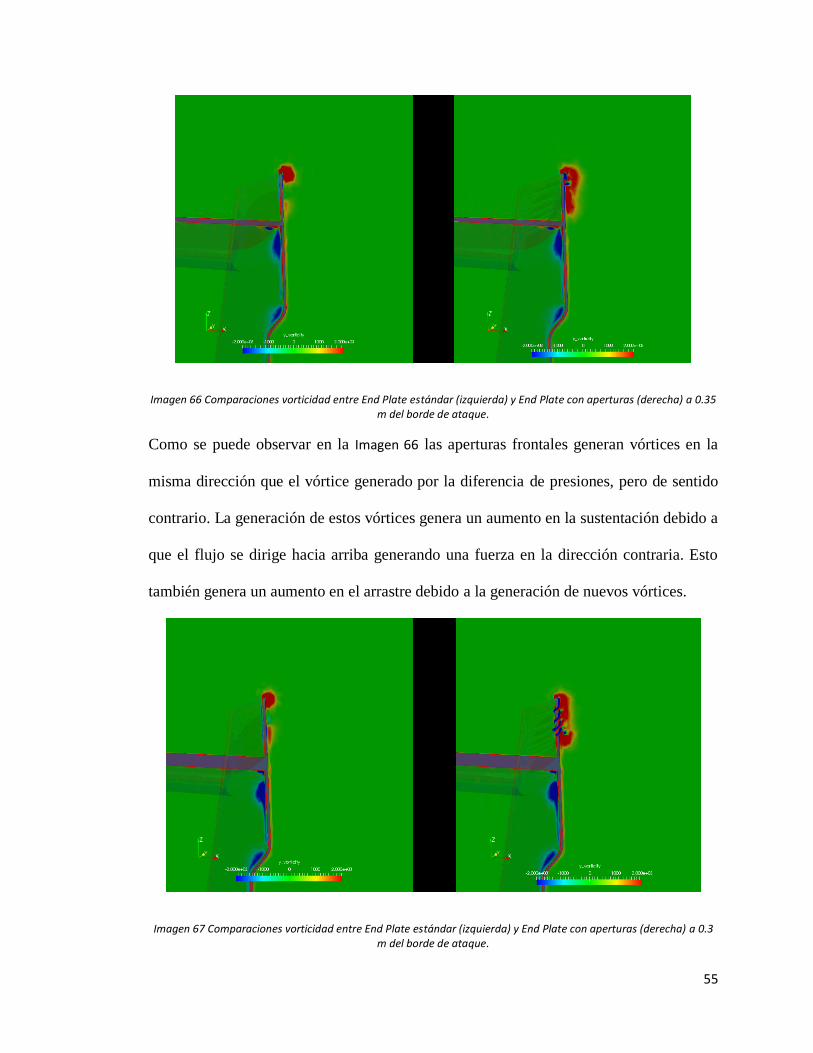
Imagen 66 Comparaciones vorticidad entre End Plate estándar (izquierda) y End Plate con aperturas (derecha) a 0.35 m del borde de ataque.
Como se puede observar en la Imagen 66 las aperturas frontales generan vórtices en la
misma dirección que el vórtice generado por la diferencia de presiones, pero de sentido
contrario. La generación de estos vórtices genera un aumento en la sustentación debido a
que el flujo se dirige hacia arriba generando una fuerza en la dirección contraria. Esto
también genera un aumento en el arrastre debido a la generación de nuevos vórtices.
Imagen 67 Comparaciones vorticidad entre End Plate estándar (izquierda) y End Plate con aperturas (derecha) a 0.3 m del borde de ataque.
56
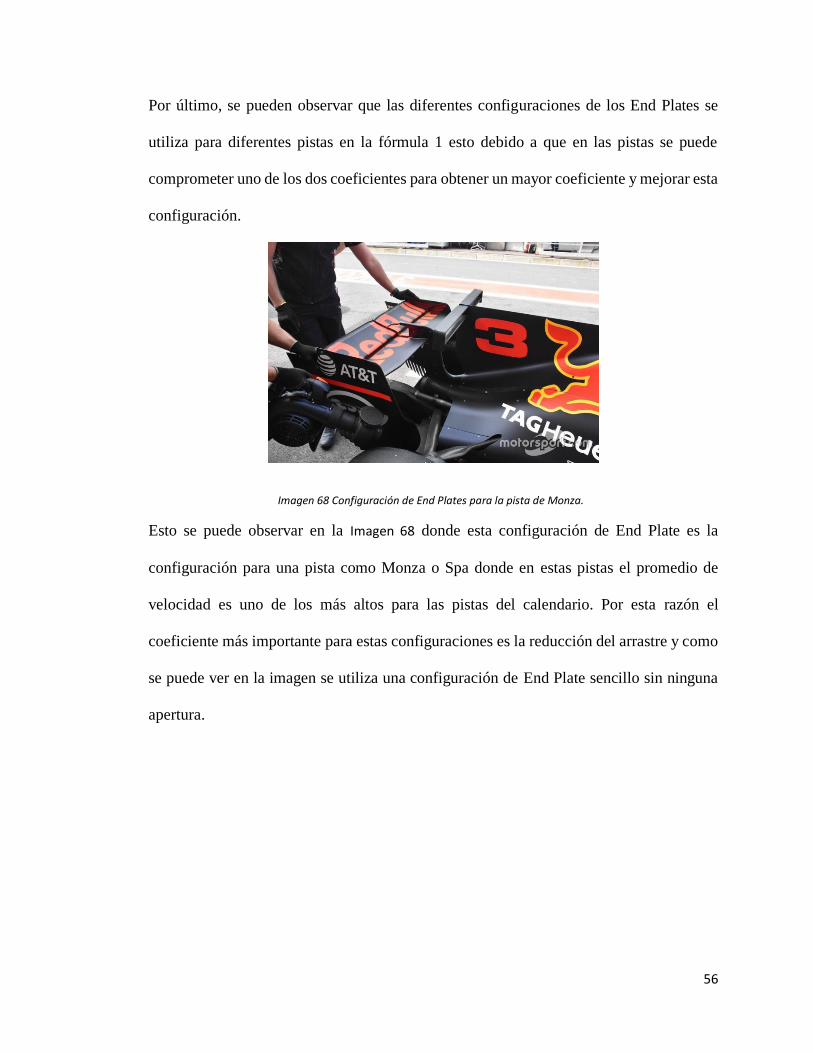
Por último, se pueden observar que las diferentes configuraciones de los End Plates se
utiliza para diferentes pistas en la fórmula 1 esto debido a que en las pistas se puede
comprometer uno de los dos coeficientes para obtener un mayor coeficiente y mejorar esta
configuración.
Imagen 68 Configuración de End Plates para la pista de Monza.
Esto se puede observar en la Imagen 68 donde esta configuración de End Plate es la
configuración para una pista como Monza o Spa donde en estas pistas el promedio de
velocidad es uno de los más altos para las pistas del calendario. Por esta razón el
coeficiente más importante para estas configuraciones es la reducción del arrastre y como
se puede ver en la imagen se utiliza una configuración de End Plate sencillo sin ninguna
apertura.

57
Imagen 69 Configuración para la pista de Mónaco.
A diferencia de cómo se observa en la Imagen 69 donde la configuración de End Plate es
más complicada con aperturas tanto traseras como delanteras debido a que en esta pista el
coeficiente más importante es el de la sustentación por sus bajas velocidades promedio y
se puede comprometer el arrastre. Esto se puede observar en la Imagen 60 donde la mejor
configuración según el arrastre es el End Plate estándar y la mejor según la sustentación
es la de las diferentes aperturas en el End Plate.
6. CONCLUSIONES
o A partir de simulaciones computacionales se evaluaron los efectos de los End Plates
en el arrastre y sustentación de un alerón trasero de un carro de fórmula 1.
o Se caracterizaron los coeficientes aerodinámicos de las configuraciones sin y con
End Plates a partir de simulaciones.
o Se compararon los resultados obtenidos para las configuraciones sin y con End
Plates
58
o Se evaluaron las diferentes configuraciones de End Plates para el alerón trasero a
partir de simulaciones y su utilidad en las diferentes pistas del calendario de la
Formula 1.
7. RECOMENDACIONES
Para futuras aplicaciones de este estudio se recomienda utilizar una geometría que involucre
el carro completo debido a que no tomar en cuenta la geometría afecta de manera considerable
los diferentes coeficientes aerodinámicos del alerón. También es importante tener en cuenta
que al utilizar la geometría del carro completo se da la opción de colocar aun mas geometrías
diferentes sobre todo el End Plate para mejorar los coeficientes aerodinámicos.
Se recomienda la investigación de diferentes geometrías de la apertura delantera del End Plate
debido a que esta tiene un efecto importante dentro de los coeficientes aerodinámicos y no se
pudo encontrar la mejor geometría de esta apertura para la mejoría de los coeficientes.
59
8. BIBLIOGRAFIA
[1] M. Williamson, «ESPN,» [En línea]. Available:
http://en.espn.co.uk/f1/motorsport/story/3831.html.
[2] J. Katz, Race Car Aerodynamics, Cambridge: Bentley Publishers, 1995.
[3] N. R. Aragón, «DESARROLLO DE UN ESTUDIO COMPUTACIONAL PARA EL ANALISIS DE ALERONES
DE UNO O MAS ELEMENTOS PARA VEHICULOS DE COMPETENCIA,» Bogota, 2016.
[4] S. A. A. Gómez y D. E. B. Otero, «Analysis of the Vorticity in the Near Wake of a Station Wagon,»
Journal of Fluids Engineering, Bogota, 2017.
[5] M. A. P. Garcia, «Perfiles Aerodinamicos,» Silao de la Victoria, 2013.
[6] J. D. A. Jr., Fundamentals of Aerodynamics, New York: McGraw-Hill, 2001.
[7] M. Hepperle, «Velocity and Pressure Distributions,» 05 Mayo 2004. [En línea]. Available:
https://www.mh-aerotools.de/airfoils/velocitydistributions.htm.
[8] H. Schlinchting, Teoria de la capa limite, Bilbao: Urmo.
[9] A. Urlings, «Rear Wing Endplates in F1: An Extensive Analysis,» F1Technical, 24 Abril 2016. [En
línea]. Available: https://www.f1technical.net/features/20279?page=1.
[10] CFD Online, «SST k-omega model,» MediaWiki, 28 Febrero 2011. [En línea]. Available:
https://www.cfd-online.com/Wiki/SST_k-omega_model.
[11] J. E. Thompson, Numerical Grid Generation, Elsevier Science Publishing Co, 1997.
[12] Airfoil Tools, «Airfoil Tools,» [En línea]. Available: http://airfoiltools.com/index.
[13] Fédération Internationale de l’Automobile, «2018 FORMULA ONE TECHNICAL REGULATIONS,»
2017.
[14] F. M. White, Mecanica de fluidos, Madrid: McGraw Hill, 2004.
[15] POINTWISE, «Compute Grid Spacing for a Given Y+,» [En línea]. Available:
http://www.pointwise.com/yplus/.
[16] CFD Online, «Turbulence free-stream boundary conditions,» 15 Enero 2014. [En línea]. Available:
https://www.cfd-online.com/Wiki/Turbulence_boundary_conditions.
[17] H. K. Versteeg, An introduction to computational fluid dynamics, Harlow: Longman Scientific &
Technical, 1995.

60