profesor gu.a en las proyectos de t.tulo de pregrado ...jparra/profesor.pdf · ... simulación...
TRANSCRIPT

Profesor guía en las Proyectos de Título de Pregrado derivadas de la Tesis Doctoral: Proyecto 1: Código Proyecto en Biblioteca : M(DC) 004 Al68 2007
Autor : Almonacid Mansilla, Oscar Manuel Título : Simulación digital de tráfico para intersecciones señalizadas por
semáforo, bajo ambiente tridimensional[disco compacto] / Resumen 1. Objetivo Desarrollar simulador de tráfico de las intersecciones de avenidas controladas mediante un semáforo, 2. Modelado 3D Se modelan los objetos tridimensionales ocupados en el simulador. Estos son: los vehículos, los semáforos y la intersección. 2.1. Modelado del Vehículo Lo primero fue disponer de un plano de vehículo que sirva como guía en el proceso de modelado. A este plano se le define como blueprint y generalmente provee de todas las vistas del objeto, en este caso un vehículo, para facilitar su modelado en un ambiente de tres dimensiones. El vehículo seleccionado como modelo para utilizar en el simulador fue el Audi A4 (año 2004) cuyo blueprint esta disponible en la pagina dedicada al tema www.the-blueprints.com. La siguiente imagen muestra el modelo finalizado con la textura aplicada, es la siguiente:

2.2. Modelado de la Intersección
El proceso para el modelado de la intersección fue el mismo que el aplicado para el coche. La obtención de la imagen de referencia en este caso es a través de una fotografía satelital obtenida desde Google Heart. En la fotografía se pude apreciar de forma clara la geometría de la intersección Collao-Carrera-Irarrazabal de la ciudad de Concepción, Chile, una vez que la intersección esta modelada se escala según la información captura y presentada en la primara parte del informe.
2.3. Programación
En el tema de herramientas de programación se pueden mencionar: el compilador, los motores, gráfico y físico; además, del envoltorio que permite trabajar de forma transparente con ambos. Todas las herramientas de programación que se integran al proceso de desarrollo al mismo tiempo y de forma paralela, cuando se inicia la etapa de codificación del simulador, ya que al trabajar con el envoltorio NxOgre se trabaja paralelamente con Ogre y PhysX y para trabajar con NxOgre se utiliza el compilador Visual C++: La implementación del simulador se realiza trabajando directamente con la API de NxOgre, dejando en un segundo plano a Ogre y PhysX aunque en algunas oportunidades es necesario trabajar directamente con los motores, afortunadamente NxOgre provee estas facilidades. Finalmente, para el modelamiento del comportamiento dinámico de los vehículos se han utilizado las ecuaciones derivadas de la Tesis Doctoral de este informe de aportes de la misma

2.4 Resultados Se ha obtenido un simulador que permite visualizar el comportamiento de un conjunto de vehículos frente a un semáforo; además, de poder definir los tiempos de dicho semáforo de las calles mencionadas. Por otra parte, se están elaborando las publicaciones en análisis.

Proyecto 2: Código Proyecto en Biblioteca : S/C
Autor : Araneda Caro Marcela Título : Modelo de dinámica de vehículo e implementación en
realidad virtual Resumen 1. Objetivo Desarrollar simulador de conducción donde medir parámetros de comportamiento de un vehículo mediante Realidad Virtual. 2. Modelado 3D Se modelan los siguientes objetos tridimensionales ocupados en el simulador: 2 vehículos y la ciudad. 2.1. Modelado de los Vehículos Se diseñan 2 vehículos para la simulación del comportamiento de estos en una ciudad (Figura 1).
Figura 1. Simulador de conducción (2 modelos de vehículos).
Las especificaciones básicas (altura, peso, etc.) de estos se pueden visualizar en la figura 1. El primer vehículo es un sedán y el segundo un todo terreno. Este simulador ha sido desarrollo es 3DWebMaster de Superscape, producto de realidad virtual. Este producto permite generar los modelos de vehículo mediante un editor de diseño de shape con el cual se implementaron cada uno de los componentes móviles del mismo.
2.2. Modelado del simulador
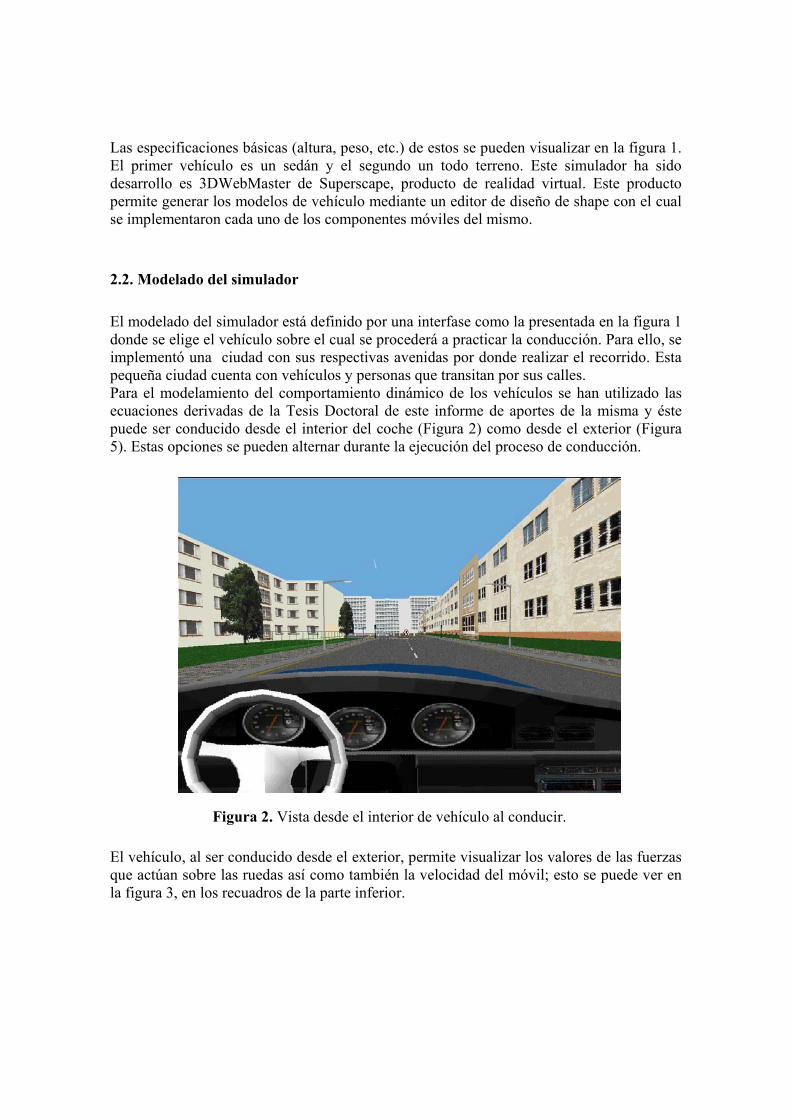
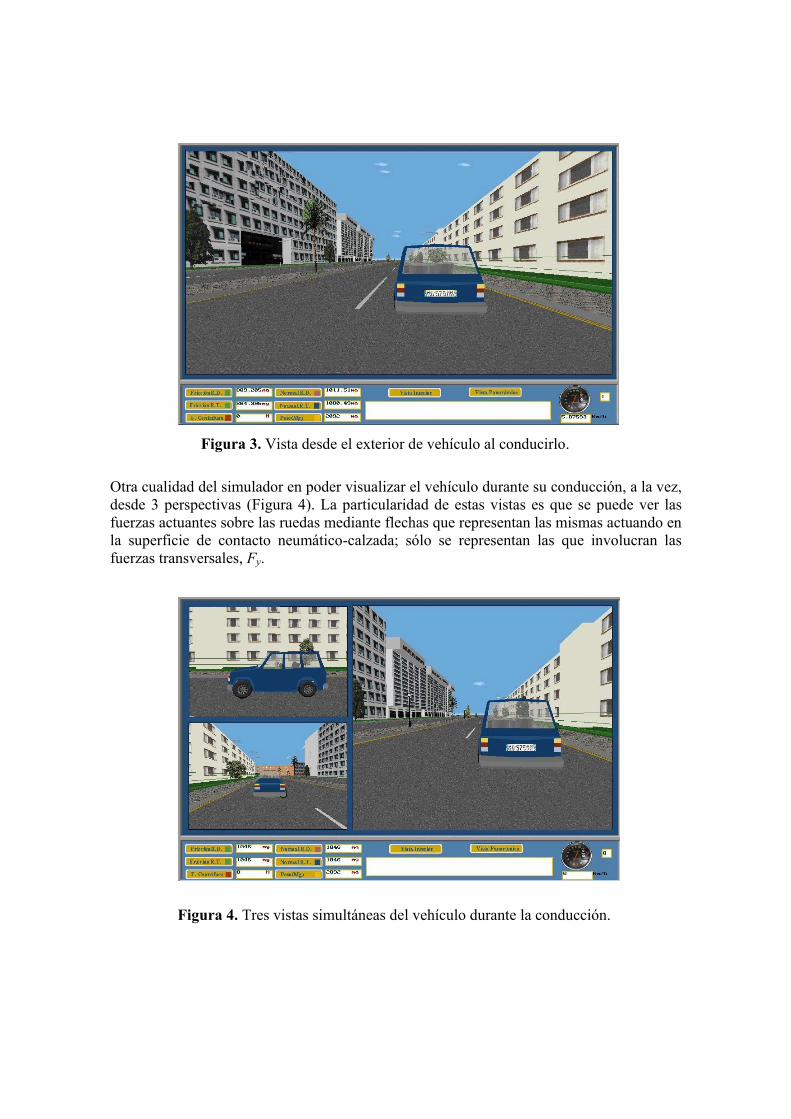
El modelado del simulador está definido por una interfase como la presentada en la figura 1 donde se elige el vehículo sobre el cual se procederá a practicar la conducción. Para ello, se implementó una ciudad con sus respectivas avenidas por donde realizar el recorrido. Esta pequeña ciudad cuenta con vehículos y personas que transitan por sus calles. Para el modelamiento del comportamiento dinámico de los vehículos se han utilizado las ecuaciones derivadas de la Tesis Doctoral de este informe de aportes de la misma y éste puede ser conducido desde el interior del coche (Figura 2) como desde el exterior (Figura 5). Estas opciones se pueden alternar durante la ejecución del proceso de conducción. El vehículo, al ser conducido desde el exterior, permite visualizar los valores de las fuerzas que actúan sobre las ruedas así como también la velocidad del móvil; esto se puede ver en la figura 3, en los recuadros de la parte inferior.
Figura 2. Vista desde el interior de vehículo al conducir.
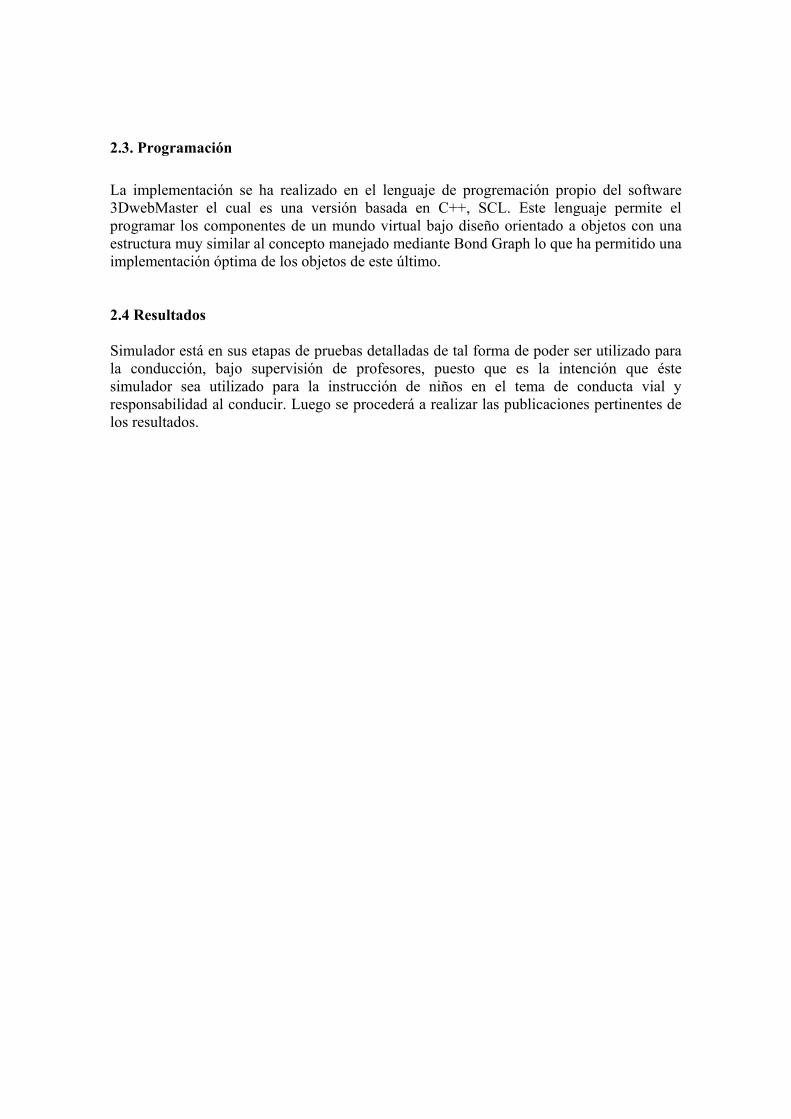
Otra cualidad del simulador en poder visualizar el vehículo durante su conducción, a la vez, desde 3 perspectivas (Figura 4). La particularidad de estas vistas es que se puede ver las fuerzas actuantes sobre las ruedas mediante flechas que representan las mismas actuando en la superficie de contacto neumático-calzada; sólo se representan las que involucran las fuerzas transversales, Fy.
Figura 3. Vista desde el exterior de vehículo al conducirlo.
Figura 4. Tres vistas simultáneas del vehículo durante la conducción.
2.3. Programación
La implementación se ha realizado en el lenguaje de progremación propio del software 3DwebMaster el cual es una versión basada en C++, SCL. Este lenguaje permite el programar los componentes de un mundo virtual bajo diseño orientado a objetos con una estructura muy similar al concepto manejado mediante Bond Graph lo que ha permitido una implementación óptima de los objetos de este último. 2.4 Resultados Simulador está en sus etapas de pruebas detalladas de tal forma de poder ser utilizado para la conducción, bajo supervisión de profesores, puesto que es la intención que éste simulador sea utilizado para la instrucción de niños en el tema de conducta vial y responsabilidad al conducir. Luego se procederá a realizar las publicaciones pertinentes de los resultados.