planteamiento del problema elástico linealmateriales.azc.uam.mx/gjl/clases/ma10_i/s16.pdf3.1...
TRANSCRIPT

Capítulo 3
Planteamiento del problema elástico
lineal
Para la simulación o representación de un proceso o un fenómeno físico, una de las partes funda-
mentales es su planteamiento matemático, que en su forma fuerte se le conoce como un problema
de valores en la frontera (PVF), el cual generalmente se representa por un sistema de ecuaciones
diferenciales parciales u ordinarias definidas sobre una región o intervalo, y de un conjunto de
condiciones de frontera, que especifican los valores de las variables involucradas y de sus derivadas
de la frontera del intervalo o región. La forma fuerte se refiere a que la solución del PVF debe
satisfacer cada punto del dominio donde se define el problema.
Como ejemplo de medio continuo se tiene un cuerpo tridimensional, cuyo comportamiento del
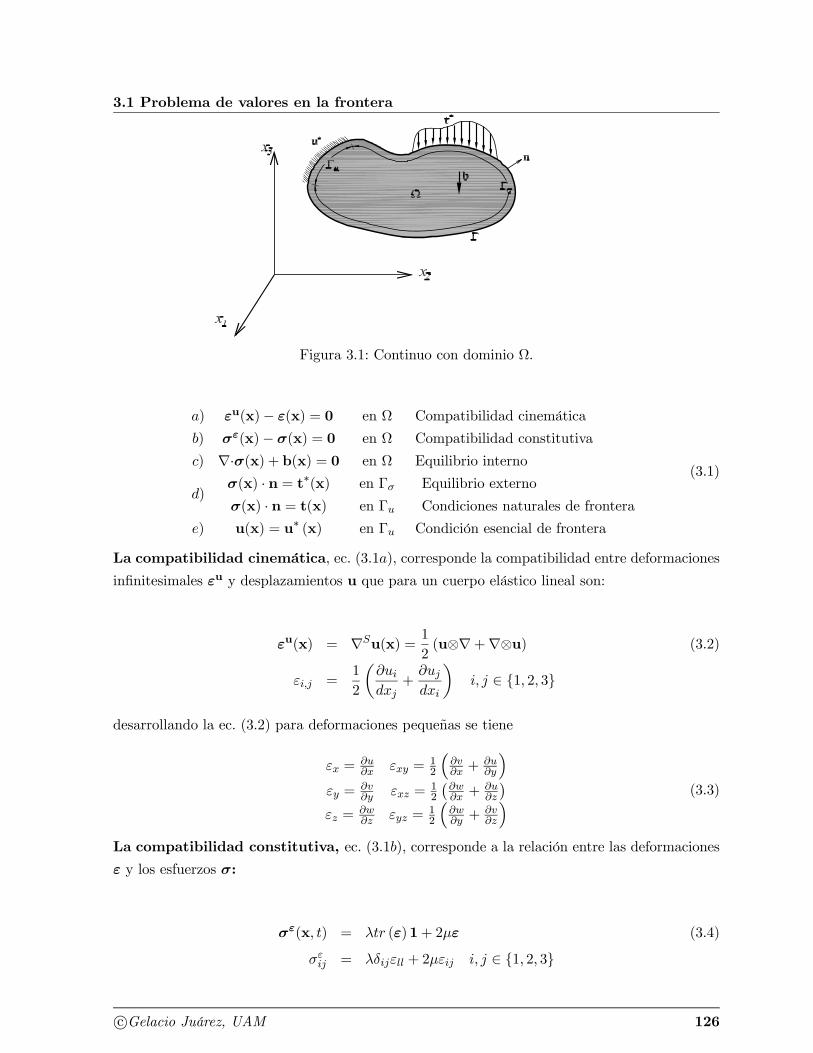
material es elástico lineal con deformaciones pequeñas, con un dominio Ω ∈ R3, puntos materialesx y frontera Γ con vector normal n (figura 3.1), el cual se somete a las acciones del vector de
fuerzas de cuerpo b en el interior del continuo, a las tracciones prescritas t∗ en Γ y los desplaza-
mientos prescritos u∗ en Γ. La frontera Γ del continuo está constituida por dos superficies Γ y
Γ; Γ corresponde a la región con desplazamientos prescritos (conocidos) y Γ corresponde al
resto de la frontera que incluye aquellas porciones donde se aplican las cargas prescritas, de tal
forma que Γ ∪ Γ = Γ y Γ ∩ Γ = ∅.
3.1. Problema de valores en la frontera
3.1.1. Sólidos
El PVF del problema elástico lineal se define en forma fuerte por las siguientes ecuaciones y
condiciones de frontera:
c°Gelacio Juárez, UAM 125
3.1 Problema de valores en la frontera
Figura 3.1: Continuo con dominio Ω.
) εu(x)− ε(x) = 0 en Ω Compatibilidad cinemática
) σ(x)− σ(x) = 0 en Ω Compatibilidad constitutiva
) ∇·σ(x) + b(x) = 0 en Ω Equilibrio interno
)σ(x) · n = t∗(x)σ(x) · n = t(x)
en Γ
en Γ
Equilibrio externo
Condiciones naturales de frontera
) u(x) = u∗ (x) en Γ Condición esencial de frontera
(3.1)
La compatibilidad cinemática, ec. (3.1), corresponde la compatibilidad entre deformaciones
infinitesimales εu y desplazamientos u que para un cuerpo elástico lineal son:
εu(x) = ∇u(x) =1
2(u⊗∇+∇⊗u) (3.2)
=1
2
µ
+
¶ ∈ 1 2 3
desarrollando la ec. (3.2) para deformaciones pequeñas se tiene
=
=12
³+
´ =
=12
¡+
¢ =
=12
³+
´ (3.3)
La compatibilidad constitutiva, ec. (3.1), corresponde a la relación entre las deformaciones
ε y los esfuerzos σ:
σ(x ) = (ε)1+ 2ε (3.4)
= + 2 ∈ 1 2 3
c°Gelacio Juárez, UAM 126

3.1 Problema de valores en la frontera
donde y son las constantes de Lamé que se definen, en función del módulo elástico y de la
relación de Poisson , como:
= (1+)(1−2)
= 2(1+)
(3.5)
Para un sólido elástico lineal en tres dimensiones, la compatibilidad entre esfuerzos y deforma-
ciones es:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭=
(1 + ) (1− 2)
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1− 0 0 0
1− 0 0 0
1− 0 0 0
0 0 0 1−22
0 0
0 0 0 0 1−22
0
0 0 0 0 0 1−22
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭(3.6)
El equilibrio interno, ec. (3.1), corresponde a la ecuación de Cauchy:
∇·σ(x) + b(x) = ρ2u(x )
2(3.7)
+ =
2
2 ∈ 1 2 3
en este caso se considera un comportamiento cuasiestático, por consiguiente, la aceleración es
nula.
+
+
+ = 0
+
+
+ = 0 (3.8)
+
+
+ = 0
El equilibrio externo, ec. (3.1), indica que la proyección de los esfuerzos, σ · n, sobre lafrontera Γ debe satisfacer a las tracciones prescritas, t∗:⎧⎪⎪⎨⎪⎪⎩
∗∗∗
⎫⎪⎪⎬⎪⎪⎭ = σ · n =
⎧⎪⎪⎨⎪⎪⎩ + +
+ +
+ +
⎫⎪⎪⎬⎪⎪⎭Las condiciones esencial de frontera, ec. (3.1), indica que el vector de desplazamientos u
debe ser igual a los prescritos ,u∗, en la frontera Γ.
c°Gelacio Juárez, UAM 127

3.1 Problema de valores en la frontera⎧⎪⎪⎨⎪⎪⎩∗
∗
∗
⎫⎪⎪⎬⎪⎪⎭ =
⎧⎪⎪⎨⎪⎪⎩
⎫⎪⎪⎬⎪⎪⎭Las ecs. (3.1− ) constituyen un sistema de 15 ecuaciones diferenciales en derivadas parciales.
El sistema está constituido por 15 ecuaciones diferenciales con 15 incógnitas en , , . El
problema queda bien condicionado cuando se le agregan las condiciones de frontera adecuadas,
ecs. (3.1− ).
3.1.2. Barras
Sea un elemento barra de la fig. 3.2 con dominio Ω ∈ R3, modelado por su eje longitudinal medio = [0 ] ⊂ R. El sistema local de coordenadas se denota por ∈ [0 ] a lo largo de su eje, sudesplazamiento infinitesimal se describe por los desplazamientos de los puntos a lo largo de su
eje : → R.
Figura 3.2: Barra
) =
0 ≤ ≤ Compatibilidad cinemática
) = ; =
0 ≤ ≤ Compatibilidad constitutiva
) + = 0;
+ = 0 0 ≤ ≤ Equilibrio interno
) = − ; − = − en Γ Equilibrio externo
) =∗ en Γ Condiciones esenciales de frontera
) = ; = en Γ
Condiciones naturales
(Equilibrio externo)
(3.9)
c°Gelacio Juárez, UAM 128

3.1 Problema de valores en la frontera
3.1.3. Vigas de Bernoulli-Euler
La teoría clásica (Bernoulli-Euler) de vigas se basa en las siguientes suposiciones:
1. Simetría plana. El eje longitudinal es recto y la sección transversal de la viga tiene un plano
longitudinal de simetría. Las cargas transversales resultantes que actúan en cada sección
yacen en ese plano.
2. Variación de la sección transversal. La sección transversal es constante o varía suavemente.
3. Normal. Las secciones planas originalmente normales al eje de la viga permanecen planas
y normales al eje longitudinal deformado después de la flexión, figura (3.3).
4. Energía de deformación. Los elementos toman solamente en cuenta la energía de deforma-
ción interna debida a flexión. Otros efectos como la deformación transversal y la fuerza
axial se ignoran.
5. Linearización. Las deflexiones transversales, rotaciones y deformaciones se consideran pe-
queñas tal que las suposiciones de deformaciones infinitesimales sean aplicables.
6. Comportamiento elástico. Se asume que el comportamiento del material es elástico e
isotrópico. Vigas heterogéneas fabricadas con diferentes materiales, como el concreto re-
forzado, no se excluyen.
Figura 3.3: Elemento viga.
El campo de ecuaciones que definen el PVF en 0 ≤ ≤ de la teoría de vigas de Bernoulli-Euler
son:
c°Gelacio Juárez, UAM 129

3.1 Problema de valores en la frontera
) = ; =
= 2
2en 0 ≤ ≤ Compatibilidad cinemática
) = ; = 22
en 0 ≤ ≤ Compatibilidad constitutiva
) 22− = 0; =
;
− = 0 en 0 ≤ ≤ Equilibrio interno
)
−∗ = 0; 22
=∗
− ∗ = 0; 33
= ∗
− = 0
− = 0
en ΓEquilibrio externo
Condiciones naturales
) = ∗
= ∗en Γ Condiciones esenciales de frontera
(3.10)
donde, Γ, representa los extremos de la viga.
El PVF definido en (3.10) contiene las siguientes relaciones generalmente empleadas en teoría de
vigas.
=
= 2
2
= 3
3
= 4
4
3.1.4. Vigas de Timoshenko
La teoría de vigas de Timoshenko introduce los efectos de primer orden por cortante (i.e. se
consideran las deformaciones transversales por cortante transversal), mediante el supuesto que
las secciones se mantiene planas, pero no necesariamente normales al eje neutro deformado, Fig.
3.4.
Figura 3.4: Elemento viga de Timoshenko.
La descripción del comportamiento de la viga involucra dos variables independientes en cada
c°Gelacio Juárez, UAM 130

3.1 Problema de valores en la frontera
punto del eje neutro, la deflexión transversal, , y la rotación de la sección transversal, , por lo
que la deformación por cortante en cada punto a lo largo del eje de la viga está dado en la ec.
(3.11) por la diferencia entre la rotación de la sección transversal y la pendiente del eje neutro
= − (3.11)
El campo de ecuaciones que define el PVF en 0 ≤ ≤ de la teoría de las vigas de Timoshenko
son:
a) =
= −
en 0 ≤ ≤ Compatibilidad cinemática
b) =
= en 0 ≤ ≤ Compatibilidad constitutiva
c)
+ = 0− = 0
en 0 ≤ ≤ Equilibrio interno
d)
−∗ = 0
− ∗ = 0
− = 0
− = 0
en Γ Equilibrio externo
e) = ∗
= ∗en Γ Condiciones esenciales de frontera
(3.12)
La rotación , de la sección transversal y la curvatura, , del eje longitudinal deformado son:
=
− =
(3.13)
La compatibilidad constitutiva en la ec. (3.12b) está dada por las relaciones momento-curvatura
y las relaciones cortante-deformación:
= y = (3.14)
donde es la fuerza cortante transversal, el promedio de las deformaciones por cortante en
la sección transversal, es el módulo de rigidez a cortante y = es el área efectiva de
cortante. El factor considera en promedio la corrección de distribución por cortante hecha para
distribución de las deformaciones por cortante sobre el espesor de la sección transversal, e.g.,
para las vigas de sección transversal rectangular el valor de es usualmente 56.
Las ecuaciones de equilibrio interno, Eq. (3.12c), se definen por las siguiente relaciones:
=
− =
2
2− = 0 (3.15)
c°Gelacio Juárez, UAM 131

3.2 Principios energéticos
3.2. Principios energéticos
3.2.1. Terminología y consideraciones
Trabajo
Se define como el producto de la fuerza y el desplazamiento en el punto de aplicación y en la
dirección de la fuerza.
Energía
Es la magnitud física que representa la capacidad para realizar un trabajo. La energía mecánica
se divide en:
Energía Mecánica
(Energía Potencial Reposo o posición
Energía Cinética Movimiento
Energía de deformación
Si se supone un sistema de fuerzas aplicado a un cuerpo, éste se deforma hasta que la suma de
fuerzas internas equilibra al sistema de fuerzas externas. Las fuerzas externas realizan un trabajo
que se trasforma y acumula en un cuerpo como energía. Esta energía llamada de deformación se
utiliza para recuperar su forma cuando cesa la acción del sistema de fuerzas.
La consideración de sólido en esta sección se basa en las siguientes consideraciones:
El proceso producido en un cuerpo sujeto a esfuerzo es irreversible, i.e., no ocurren efectos
de disipación de energía como deformaciones plásticas.
El proceso de deformación es isotérmico, por lo que no existe interacción entre la deforma-
ción y la temperatura.
El proceso de carga es cuasiestático, por lo que la energía cinética de las fuerzas de inercia
se desprecian.
Los desplazamientos de un sólido se describen de acuerdo a una convención de Lagrange.
El teorema de conservación de masas (Ω = Ω) y las fuerzas de cuerpo (b = b) en un
cuerpo deformado y no deformado son iguales
Expresiones de energía
Considere la barra de la fig. (3.5) fija en el extremo izquierdo y sujeta a un estado de esfuerzo
uniaxial por una sola fuerza . La relación entre la fuerza y desplazamiento puede asumirse que
es lineal o no lineal, Fig. (3.6).
La función lineal que define el desplazamiento a lo largo del eje de la barra de la Fig. 3.5 es:
() =
(3.16)
El valor del desplazamiento en el extremo derecho es:
c°Gelacio Juárez, UAM 132

3.2 Principios energéticos
Figura 3.5: Barra: a) geometría, b) aplicación de una carga, c) campo de desplazamientos y d)
campo de deformaciones.
() = =
(3.17)
despejando de la ec. (3.16) se tiene:
=()
(3.18)
Figura 3.6: Curva carga vs. desplazamiento: a) elástico lineal y b) elástico no lineal.
El trabajo externo realizado por la fuerza normal y el desplazamiento está dado por:
= (3.19)
donde se asume que es una cantidad virtual, infinitesimalmente pequeñas y geométricamente
compatibles. La ec.(3.19) representa el área de una pequeña porción de la barra con ancho
c°Gelacio Juárez, UAM 133

3.2 Principios energéticos
y con una altura en el diagrama carga-desplazamiento de la fig. (3.6). El trabajo total es la
integral sobre todas las diferenciales de desplazamiento.
=
Z =
=0
(3.20)
Sustituyendo la ec. (3.18) en la ec. (3.20) se tiene:
=
Z0
(3.21)
Integrando la ec.(3.21),
=
Z0
(3.22)
=1
2
2
¯0
(3.23)
=1
2
2
(3.24)
Sustituyendo la ec. (3.17) en la (3.24) se tiene la el trabajo externo.
=1
2 (3.25)
que corresponde al área bajo la curva de la Fig. (3.7).
Figura 3.7: Energía de deformación.
El trabajo externo se acumula en la llamada energía interna de deformación. Sustituyendo el
incremento de desplazamiento por .
= =
= Ω = (3.26)
c°Gelacio Juárez, UAM 134

3.2 Principios energéticos
El área bajo la curva de la fig. (3.7)., es igual a la energía del diagrama esfuerzo deformación
mostrado en la figura 3.8
Figura 3.8: Energía de deformación.
Si se divide la energía de la ec. (3.26) entre el volumen del elemento, Ω = , se obtiene la
expresión de la densidad de energía de deformación (energía de deformación específica):
= (3.27)
Trabajo complementario
En la Fig. (3.9), se le denomina al trabajo complementario, porque y se complementa
uno al otro y su suma se representa por el rectángulo · = +. Por analogía, a las ecs.
(3.19) y (3.20) la diferencial de energía complementaria es:
= (3.28)
y la energía complementaria es
=
Z =
=0
(3.29)
Se denomina energía complementaria de deformación, , al área arriba de la curva esfuerzo
deformación y limitada en la parte superior por la recta horizontal que corresponde al esfuerzo,
Fig.(3.10).
En le caso de materiales elástico lineales, la energía de deformación es igual a la energía de
deformación complementaria.
= =1
2
En el caso de materiales elástico lineales, la energía de deformación es igual a la energía de
deformación complementaria.
c°Gelacio Juárez, UAM 135

3.2 Principios energéticos
Figura 3.9: Energía de deformación.
Figura 3.10: Energía complementaria de deformación.
Por analogía a la ec. (3.27), la densidad de energía de deformación complementaría es:
= (3.30)
La relación entre los esfuerzos y las deformaciones dada por una relación elástico no lineal co-
mo la de la Fig. 3.10b. Si se tiene una relación lineal -, se obtiene que la energía de deformación
específica es igual a la energía de deformación específica complementaria.
= =1
2 (3.31)
La expresión ahora se extiende al medio continuo se tiene un cuerpo tridimensional, Ω ∈ R3,puntos materiales x y frontera Γ con vector normal n (figura 3.1), el cual se somete a las acciones
del vector de fuerzas de cuerpo b en el interior del continuo, a las tracciones prescritas t∗ en
Γ y los desplazamientos prescritos u∗ en Γ. La frontera Γ del continuo está constituida por
dos superficies Γ y Γ; Γ corresponde a la región con desplazamientos prescritos (conocidos) y
Γ corresponde al resto de la frontera que incluye aquellas porciones donde se aplican las cargas
prescritas, de tal forma que Γ ∪ Γ = Γ y Γ ∩ Γ = ∅. En notación vectorial, la variación del
c°Gelacio Juárez, UAM 136

3.2 Principios energéticos
trabajo externo puede escribirse como:
=
ZΩ
b · u Ω+ZΓ
t∗ · u u Γ+P · u0
con
b = [ ] vector de fuerzas de cuerpo
t∗
= [ ] vector de fuerzas de tracción
P
=£1
2
¤vector de fuerzas concentradas
u
= [ ] vector de desplazamientos
Para el caso de elástico lineal se tiene que la energía de deformación específica y la complementaria
son:
= =1
2σε =
1
2εσ
= =1
2[ + + + 2 + 2 + 2]
3.2.2. Energía en elementos estructurales
Energía por fuerza normal
Considere el elemento de la Fig. 3.11a, sujeta a la acción de una carga P. Al realizarse un corte
en la barra se tiene el volumen diferencial v de la Fig. 3.11b.
Figura 3.11: Barra a) acción de la carga P y b) elemnto diferencial.
En este elemento, el esfuerzo se define como:
= (3.32)
y la deformación como:
c°Gelacio Juárez, UAM 137

3.2 Principios energéticos
=
(3.33)
La densidad de energía de deformación está dada por:
=1
2 v (3.34)
Sustituyendo las ecs.(3.32) y (3.33) en la ec. (3.34), se tiene:
=1
2
2
2v (3.35)
Integrando ec. (3.35) en todo el elemento, considerando que v= se tiene la energía por
fuerza normal.
=1
2
Z
0
2
(3.36)
Energía por momentos flexionantes
Considere el elemento con un volumen v de la Fig. 3.12 sujeto a fuerza normal.
Figura 3.12: Viga: a) acción de las cargas, b) configuración deformada y c) elemento diferencial.
En este elemento, el esfuerzo se define como:
=
(3.37)
y la deformación como:
=
(3.38)
La densidad de energía de deformación está dad por:
c°Gelacio Juárez, UAM 138

3.2 Principios energéticos
=1
2 v (3.39)
Sustituyendo las ecs.(3.37) y (3.38) en la ec. (3.39), se tiene:
=1
2
2
22v (3.40)
Integrando ec. (3.40) en todo el elemento, considerando que v= se tiene la energía por
fuerza normal.
=
Z
0
Z
1
2
2
22 =
Z
0
1
2
2
2
Z
2 | z
(3.41)
=1
2
Z
0
2
(3.42)
Para el momento , mostrado en la fig. 3.13, la energía a flexión está dada, análogamente a la
ec. 3.42, por:
=1
2
Z
0
2
(3.43)
Figura 3.13: Momentos flexionantes y .
Energía por cortante
Sea el elemento en la Fig. 3.14 sujeto a fuerza cortante .
En este elemento, el esfuerzo cortante se define como:
=
(3.44)
donde es el primer momento y la base .
y la deformación por cortante como:
=
(3.45)
c°Gelacio Juárez, UAM 139

3.2 Principios energéticos
Figura 3.14: Fuerza cortante .
donde el módulo de rigidez a cortante , dependiente de la relación de Poisson ,está dado por:
=
2(1 + )(3.46)
La densidad de energía de deformación está dada por:
=1
2 v (3.47)
Sustituyendo las ecs. (3.44) y (3.45) en la ec. (3.47), se tiene:
=1
2
2 2
2 2
2v (3.48)
Sea = 2 en la ec. (3.48), siendo el radio de giro, se tiene:
=1
2
2
22 2
2v (3.49)
Integrando ec. (3.49) en todo el elemento, considerando que v= se tiene la energía por
fuerza cortante .
=
Z
0
Z
1
2
2
22 2
2 =
Z
0
1
2
2
Z
22 2
2 | z
(3.50)
=1
2
Z
0
2
(3.51)
donde es el coeficiente de forma por cortante, el cual es dependiente de la forma de la sección
como se muestra en la Fig. 3.15.
Para la fuerza cortante , mostrado en la fig. 3.16, la energía por cortante, análogamente a la
ec. 3.51, se define como:
c°Gelacio Juárez, UAM 140

3.2 Principios energéticos
Figura 3.15: Coeficiente de forma por cortante.
=1
2
Z
0
2
(3.52)
Figura 3.16: Fuerza cortante .
Energía por momento torsionante
Sea el elemento en la Fig. 3.17 sujeto a momento torsionante .
En este elemento, el esfuerzo cortante se define como:
=
(3.53)
donde es el momento polar de inercia y la distancia.
y la deformación por cortante como:
=
(3.54)
La densidad de energía de deformación está dada por:
=1
2 v (3.55)
c°Gelacio Juárez, UAM 141

3.2 Principios energéticos
Figura 3.17: Momento torsionante .
Sustituyendo las ecs. (3.53) y (3.54) en la ec. (3.55), se tiene:
=1
2
2
2
2v (3.56)
Integrando ec. (3.56) en todo el elemento, considerando que v= se tiene la energía por
fuerza cortante .
=
Z
0
Z
1
2
2
22 =
Z
0
1
2
2
2
Z
2 | z
(3.57)
=1
2
Z
0
2
(3.58)
La energía para un elemento estructural está dada por:
= + + + + +
=1
2
Z
0
2
+
1
2
Z
0
2
+
1
2
Z
0
2
(3.59)
+1
2
Z
0
2
+
1
2
Z
0
2
+1
2
Z
0
2
Ejemplo
Determine la energía de deformación de la siguiente estructura:
Los elementos mecánico se muestran en la Fig. 3.19
La energía por fuerza normal se calcula como:
=1
2
Z 1
0
0
+
1
2
Z 2
0
0
+
1
2
Z 3
0
(−1 − 11)2
=
1
23 (1 + 11)
2
(3.60)
c°Gelacio Juárez, UAM 142

3.2 Principios energéticos
Figura 3.18: Marco 3D.
La energía por momento flexionante se calcula como:
=
1
2
Z 1
0
(−1− 122)2
+
1
2
Z 2
0
(−1− 11)2
+1
2
Z 3
0
(−12 − 112)2
=1
12031¡321
21 + 15111 + 20
21
¢+
1
632 (1 + 11)
2 (3.61)
+1
23 (21 + 121)
2
La energía por momento flexionante se calcula como:
=
1
2
Z 1
0
0
+
1
2
Z 2
0
0
+
1
2
Z 3
0
(−12 − 1212)
2
=1
83¡1
21 + 221
¢2(3.62)
La energía por cortante se calcula como:
=1
2
Z 1
0
(1 + 1)2
+
1
2
Z 2
0
(1 + 11)2
+
1
2
Z 3
0
0
=1
61
¡21
21 + 3111 + 3
21
¢+
1
22 (1 + 11)
2 (3.63)
La energía por cortante se calcula como:
c°Gelacio Juárez, UAM 143

3.2 Principios energéticos
Figura 3.19: Elementos mecánicos.
c°Gelacio Juárez, UAM 144

3.2 Principios energéticos
=1
2
Z 1
0
0
+
1
2
Z 2
0
0
+
1
2
Z 3
0
0
= 0 (3.64)
La energía por momento torsionante se calcula como:
=1
2
Z 1
0
0
+
1
2
Z 2
0
(−11 −1212)
2
+
1
2
Z 3
0
0
=1
8212 (21 + 11)
2 (3.65)
La energía total en esta estructura es la suma de las ecs. (3.60) a la (3.60)
=1
23 (1 + 11)
2
+1
12031¡321
21 + 15111 + 20
21
¢+
1
632 (1 + 11)
2
+1
23 (21 + 121)
2
+1
83¡1
21 + 221
¢2(3.66)
+1
61
¡21
21 + 3111 + 3
21
¢+
1
22 (1 + 11)
2
+0
+1
8212 (21 + 11)
2
Considerando las siguientes propiedades geométricas y mecánicas del marco de la fig. 3.18;
= 002m2 = 9223× 108m2 = 6667× 10−5m4 = 12
= 1667× 10−5m4 = 4578× 10−5m4 0 = 250 cm2 1 = 10m
= 2214× 109m2 2 = 20m
= 02 3 = 30m
(3.67)
La energía para la ec. (3.66) es:
1425 6× 105m (3.68)
El momento polar de inercia para una sección rectangular como la de la Fig. 3.20 está dada por
la siguiente expresión:
=3
16
∙16
3− 336
µ1− 4
124
¶¸(3.69)
c°Gelacio Juárez, UAM 145

3.3 Teorema de Castigliano
Figura 3.20: Sección rectangular.
3.3. Teorema de Castigliano
El desarrollo del teorema de Castigliano de desplazamientos se basa en el concepto de la energía
complementaria de deformación de un sistema , por lo que también se le llama "principio de
la energía complementaria de deformación". En el caso de materiales elástico lineales, como se
estableció en la ec. (3.30), la energía complementaria de deformación, ,es igual a la energía de
deformación . Sin embargo, para el caso de un comportamiento elástico no lineal, estas energías
no son iguales 6= .
En la derivación del teorema de Castigliano, la energía complementaria de deformación se
expresa en función de las fuerzas concentradas (1 2 3) que actuán en un sistema. Pues,
a pesar de que la energía complementaria depende de fuerzas distribuidas y fuerzas de cuerpo,
éstas no se consideran explícitamente en la derivación del teorema.
Teorema 1. Si la energía de deformación de un sistema estructural se expresa en función de
los desplazamientos independientes , correspondientes a un sistema de fuerzas , la primera
derivada parcial de la energía de deformación con respecto a cualquiera de estos desplazamientos
es igual a la fuerza en dirección de dicho desplazamiento .
= (3.70)
Teorema 2. Si la energía (complementaria) de deformación de un sistema estructural se expresa
en función de las fuerzas independientes , correspondientes a un sistema de desplazamientos
, la primera derivada parcial de la energía de deformación con respecto a cualquiera de estas
fuerzas es igual al desplazamiento en dirección de dicha fuerza .
= (3.71)
Los dos teoremas de Castigliano de las ecs. (3.70) y (3.71) se generalizan a giros y momentos
como
=
= (3.72)
c°Gelacio Juárez, UAM 146

3.4 Ejemplos
3.4. Ejemplos
3.4.1. Ejemplo
Determine el desplazamiento en la dirección de la carga 1 del marco mostrado en la Fig. 3.18.
Derivando la ec. (3.66) respecto a 1 con base en el 2 teorema de Castigliano se tiene el desplaza-
miento 1.
1 =
1=
1
23 (21 + 211)
+1
632 (21 + 211) +
1
12031 (401 + 1511) +
1
23 (21 + 121)
+1
223
¡1
21 + 221
¢(3.73)
+1
22 (21 + 211) +
1
61 (61 + 311)
+0
+1
8212 (81 + 411)
sustituyendo los valores de la ec.(3.67) en la ec.(3.73) se tiene:
desplazamiento
(m)%
Normal 2032 5× 10−4 002
Flexión z 030345 2629
Flexión y 073156 6338
Cortante y 55297× 10−4 005
Cortante y 00 000
Torsión x 011842 1026
(3.74)
El desplazamiento total es: 1 = 11542, el cual es un desplazamiento muy grande. Para reducir
el valor de este desplazamiento se debe incrementar el área de la sección y/o el módulo elástico
del material. Se observa en la ec. (3.74) que el desplazamiento debido a la energía por flexión en
y, 073 m, es el que más contribuye con un 63.38% del desplazamiento total.
3.4.2. Ejemplo
Determine el desplazamiento en el extremo derecho de la viga en cantilever mostrada en la Fig.
3.21.
La energía en está viga se calcula con la contribución de la energía a flexión en z y a cortarte en
y como:
c°Gelacio Juárez, UAM 147

3.4 Ejemplos
Figura 3.21: Viga sujeta a diferentes cagas.
=1
2
Z
0
2
+
1
2
Z
0
2
(3.75)
El cortante sobre la longitud de la viga está dado por:
= (3.76)
y el momento por:
= − (3.77)
Sustituyendo las ecs. (3.76) y (3.77) en la ec. (3.75) se tiene:
=1
2
Z
0
22
+
1
2
Z
0
2
(3.78)
Integrando (3.78) se tiene:
=1
6
23
+1
2 2
(3.79)
El desplazamiento se calcula con el 1 Teorema de Castigliano dado en la ec. (3.70)
=
=1
3
3
+
(3.80)
Considere que la viga tiene una sección de b=0.10 m y h=0.20 m, una longitud de 1.5 m, y
una carga P=5,000 kg. Las propiedades geométricas para esta sección se tienen en la ec. (3.67).
Sustituyendo estos valores en la ec.(3.80) se tiene el desplazamiento.
c°Gelacio Juárez, UAM 148
3.4 Ejemplos
= 0038108| z 9874%
+ 000048791| z 126%
= 00385959m (3.81)
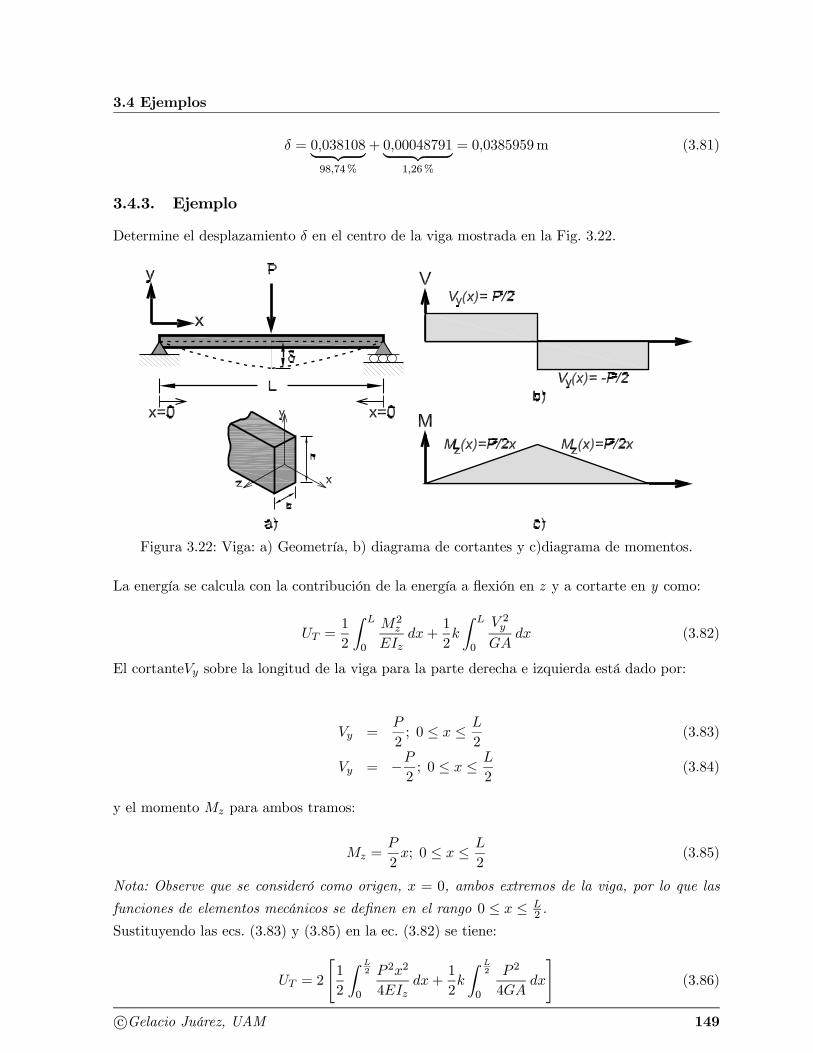
3.4.3. Ejemplo
Determine el desplazamiento en el centro de la viga mostrada en la Fig. 3.22.
Figura 3.22: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
La energía se calcula con la contribución de la energía a flexión en z y a cortarte en y como:
=1
2
Z
0
2
+
1
2
Z
0
2
(3.82)
El cortante sobre la longitud de la viga para la parte derecha e izquierda está dado por:
=
2; 0 ≤ ≤
2(3.83)
= −2; 0 ≤ ≤
2(3.84)
y el momento para ambos tramos:
=
2; 0 ≤ ≤
2(3.85)
Nota: Observe que se consideró como origen, = 0, ambos extremos de la viga, por lo que las
funciones de elementos mecánicos se definen en el rango 0 ≤ ≤ 2.
Sustituyendo las ecs. (3.83) y (3.85) en la ec. (3.82) se tiene:
= 2
"1
2
Z 2
0
22
4+
1
2
Z 2
0
2
4
#(3.86)
c°Gelacio Juárez, UAM 149

3.4 Ejemplos
Integrando (3.86) se tiene:
=1
96
23
+1
8 2
(3.87)
El desplazamiento al centro del claro 2, se calcula con el 1 Teorema de Castigliano dado en
la ec. (3.70):
2 =
=1
48
3
+1
4
(3.88)
Considere que la viga tiene una sección de b=0.20 m y h=0.40 m, una longitud de = 5 m, y
una carga = 10000 kg. Las propiedades geométricas para esta sección son:
= 008m2 = 02
= 1067× 10−3m4 = 9223× 108m2 = 2667× 10−4m4 = 12
0 = 250 cm2 = 7324× 10−4m4 = 2214× 109m2
La energía , se obtiene de la ec. (3.79) :
= 56135 m (3.89)
El desplazamiento al centro del claro, 2, se obtiene de la ec. (3.80) :
= 0011024| z 9819%
+ 00002033| z 181%
= 0011227m (3.90)
3.4.4. Ejemplo
Determine el desplazamiento en el tablero mostrado en la Fig. 3.23,que tiene un tablero de
vidrio templado de 3 cm de espesor con un peso específico de 2500 kg/m3, considere además el
peso de una persona que se cuelga de 150 kg.
El peso del tablero es:
= (105m× 180m× 003m) 2500m3 = 14175
Considerando la carga de una persona que se cuelga de 150 kg, se tiene una carga = 29175,
la cual aproximamos a = 300 kg. Los elementos mecánicos se muestran en la Fig. 3.24.
La energía se calcula con la contribución de la energía por fuarza normal en x, a flexión en z y
a cortarte en y como:
=1
2
Z
0
2
+
1
2
Z
0
2
+
1
2
Z
0
2
(3.91)
c°Gelacio Juárez, UAM 150

3.4 Ejemplos
Figura 3.23: Tablero.
Sustituyendo los elementos mecánico de la Fig. 3.24 la energía se calcula como:
=1
2
Z 2√10
0
2
10+
1
2
Z 25
0
2
+1
2
Z 2√10
0
9 2
10+
1
2
Z 25
0
0 (3.92)
+1
2
Z 2√10
0
9 22
10+
1
2
Z 25
0
9 2
Integrando (3.92) se tiene:
= 1408 2
+ 1423
2
+ 15993
2
(3.93)
El desplazamiento en el tablero , se calcula con el 1 Teorema de Castigliano dado en la ec.
(3.70):
=
= 2816
+ 2846
+ 31986
(3.94)
Considere una sección circular hueca, OC 102× 574, cuyas propiedades geométricas son:
= 2 = 21× 1010m2 = 1729× 10−3m2 = 8077× 109m2 = 1993× 10−6m4 = 03
El desplazamiento en el extremo del claro, , se obtiene de la ec. (3.95) :
= 23267× 10−5| z 001%
+ 12228× 10−4| z 005%
+ 022927| z 9994%
= 022942m (3.95)
c°Gelacio Juárez, UAM 151

3.4 Ejemplos
Figura 3.24: Elementos mecánicos del tablero.
3.4.5. Ejemplo
Determine el desplazamiento horizontal en la armadura mostrada en la Fig. 3.25.
Figura 3.25: Armadura.
Las reacciones y elementos mecánicos se muestran en la Fig. 3.26.
La energía se calcula con la contribución de la energía a fuerza normal como:
=1
2
Z
0
2
(3.96)
Sustituyendo el valor de la fuerza normal de la Fig. 3.26b en la ec. (3.96) se tiene:
c°Gelacio Juárez, UAM 152

3.4 Ejemplos
Figura 3.26: Armadura: a)reacciones y b) elementos mecánicos.
=1
2
Z 3
0
9 2
16+
1
2
Z 4
0
2
+
1
2
Z 5
0
25 2
16 (2) (3.97)
Integrando (3.97) se tiene:
=307
64
2
(3.98)
El desplazamiento horizontal , se calcula con el 1 Teorema de Castigliano dado en la ec. (3.70):
=307
32
(3.99)
3.4.6. Ejemplo
Determine el desplazamiento horizontal en el arco mostrado en la Fig. 3.27. Considérese úni-
camente la energía por fuerza normal.
Figura 3.27: Arco.
Las reacciones y elementos mecánicos se muestran en la Fig. 3.28.
La energía se calcula con la contribución de la energía a fuerza flexionante como:
=1
2
Z
0
2
(3.100)
Sustituyendo el valor de la fuerza normal de la Fig. 3.26b en la ec. (3.96) se tiene:
c°Gelacio Juárez, UAM 153

3.5 Principio de los trabajos virtuales
Figura 3.28: Arco: a) reacciones y b) momento.
=1
2
Z 2
0
22 (sin − 1)2
(3.101)
Integrando (3.97) se tiene:
= 23 (3 − 8)
8(3.102)
El desplazamiento horizontal , se calcula con el 1 Teorema de Castigliano dado en la ec. (3.70):
=3 (3 − 8)
4(3.103)
3.5. Principio de los trabajos virtuales
Un sistema deformable está en equilibrio si la suma del trabajo virtual interno y externo es cero
por desplazamientos virtuales que satisfacen las ecuaciones cinemáticas y las condiciones
cinemáticas de frontera, i.e., para que es cinemáticamente admisible. Sea una estructura
sujeta a un conjunto de cargas reales,
→ 1 2 (3.104)
las cuales producen en el punto un desplazamiento horizontal y uno vertical , Fig. 3.29a.
Si se aplica una carga virtual en el punto en dirección vertical, se tiene un incremento de
desplazamientos , Fig. 3.29b, por lo que el desplazamiento vertical total es:
= real + (3.105)
Las cargas reales producen los elementos mecánicos,
→ (3.106)
y las cargas virtuales ,
c°Gelacio Juárez, UAM 154

3.5 Principio de los trabajos virtuales
Figura 3.29: Estructura sujeta a la acción de: caga y b) caga + .
→
(3.107)
Por lo que los elementos mecánicos totales son:
= +
= +
= +
= +
= +
= +
(3.108)
La energía total en la estructura está dada por:
=1
2
Z
0
( +)2
+
1
2
Z
0
( + )2
+
1
2
Z
0
¡ +
¢2
(3.109)
+1
2
Z
0
¡ +
¢2
+1
2
Z
0
( + )2
+
1
2
Z
0
( +)2
del 1 Teorema de Castigliano dado en la ec. (3.70) se tiene:
=
=
Z
0
( + )
+
Z
0
( + )
+
Z
0
¡ +
¢
+
Z
0
¡ +
¢
+
Z
0
( + )
+
Z
0
( + )
(3.110)
Separando los elementos producidos por la carga real y la carga virtual se tiene.
c°Gelacio Juárez, UAM 155

3.5 Principio de los trabajos virtuales
=
Z
0
+
Z
0
+
Z
0
(3.111)
+
Z
0
+
Z
0
+
Z
0
+
Z
0
+
Z
0
+
Z
0
+
Z
0
+
Z
0
+
Z
0
Puesto que el trabajo desarrollado por la carga virtual es cero.
→ 0; = real (3.112)
Se tiene de la ec. 3.111 el desplazamiento real en vertical en el punto a:
real =
Z
0
+
Z
0
+
Z
0
(3.113)
+
Z
0
+
Z
0
+
Z
0
Sean los elementos mecánicos virtuales de la ec. (3.107) función de los elementos mecánicos
producidos por una carga unitaria en la misma dirección de :
=
=
= +
=
= +
=
(3.114)
Sustituyendo los elementos de la ec.(3.114) en la ec. (3.113) se tiene el desplazamiento en:
=
Z
0
+
Z
0
+
Z
0
(3.115)
+
Z
0
+
Z
0
+
Z
0
c°Gelacio Juárez, UAM 156

3.6 Ejemplos
3.6. Ejemplos
3.6.1. Ejemplo
Calcule el desplazamiento y el giro con el método de la carga virtual unitaria al centro de la viga
mostrada en la Fig. 3.30a, cuyos elementos mecánicos se muestran en la Fig. 3.30b y c. Considere
solamente la energía por flexión.
Figura 3.30: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
Cálculo del desplazamiento vertical en L/2
Se aplica una carga virtual unitaria al centro del claro
Figura 3.31: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
c°Gelacio Juárez, UAM 157

3.6 Ejemplos
El desplazamiento vertical se calcula con la contribución de la energía por flexión en de la ec.
(3.115):
=
Z
0
(3.116)
Sustituyendo las funciones de momentos flexionantes de la Fig. 3.30c y de la 3.31c en la
ec. (3.116) se tiene:
=
Z 2
0
(2(− 2)) (12)
+
Z
2
(2(− 2)) (12 (− ))
(3.117)
Integrando (3.117) se tiene:
=5
768
4
+
5
768
4
=5
384
4
(3.118)
Cálculo del giro en L/2
Se aplica un momento virtual unitario al centro del claro
Figura 3.32: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
El giro se calcula con la contribución de la energía por flexión en de la ec. (3.115):
=
Z
0
(3.119)
Sustituyendo las funciones de momentos flexionantes de la Fig. 3.30c y de la 3.31c en la
ec. (3.116) se tiene:
c°Gelacio Juárez, UAM 158

3.6 Ejemplos
=
Z 2
0
(2(− 2)) (−)
+
Z
2
(2(− 2)) (1− )
(3.120)
Integrando (3.120) se tiene:
= − 5
384
3
+
5
384
3
= 0 (3.121)
3.6.2. Ejemplo
Calcule el desplazamiento y el giro con el método de la carga virtual unitaria a una longitud 4
en la viga mostrada en la Fig. 3.30a, cuyos elementos mecánicos se muestran en la Fig. 3.30b y
c. Considere solamente la energía por flexión.
Cálculo del desplazamiento vertical en L/4
Se aplica una carga virtual unitaria sobre la viga a una alongitud L/4 como se muestra en la fig.
3.33.
Figura 3.33: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
El desplazamiento vertical se calcula con la contribución de la energía por flexión en de la ec.
(3.115):
=
Z
0
(3.122)
Sustituyendo las funciones de momentos flexionantes de la Fig. 3.33c y de la 3.31c en la
ec. (3.122) se tiene:
c°Gelacio Juárez, UAM 159

3.6 Ejemplos
=
Z 4
0
(2(− 2)) (−34)
+
Z
4
(2(− 2)) ((− ) 4)
(3.123)
Integrando (3.123) se tiene:
= − 13
8192
4
− 63
8192
4
= − 19
2048
4
(3.124)
Cálculo del giro en L/4
Se aplica un momento virtual unitario al centro del claro
Figura 3.34: Viga: a) Geometría, b) diagrama de cortantes y c)diagrama de momentos.
El giro se calcula con la contribución de la energía por flexión en de la ec. (3.115):
=
Z
0
(3.125)
Sustituyendo las funciones de momentos flexionantes de la Fig. 3.30c y de la 3.31c en la
ec. (3.116) se tiene:
=
Z 4
0
(2(− 2)) ()
+
Z
4
(2(− 2)) (− )
(3.126)
Integrando (3.126) se tiene:
=13
6144
3
− 63
2048
3
= − 11
384
3
(3.127)
3.6.3. Ejemplo
Determine los desplazamientos , y
en la armadura mostrada en la Fig. 3.35.
c°Gelacio Juárez, UAM 160

3.6 Ejemplos
Figura 3.35: Armadura.
Figura 3.36: Armadura: a) reacciones y b) elementos mecánicos.
Las reacciones y elementos mecánicos se muestran en la Fig. 3.36.
El desplazamiento en armaduras se calcula con la contribución de la energía a fuerza normal de
la ec. (3.115):
=
Z
0
(3.128)
Puesto que las barras tienen fuerzas normales constantes, el desplazamiento dado en la ec. (3.128)
se calcula como:
=
X=1
(3.129)
Para las barras que forman la armadura.
Cálculo del desplazamiento
Se aplica una carga horizontal virtual unitaria en el nodo de la armadura como se muestra en
la Fig. 3.37:
El desplazamiento se calcula de la ec. (3.128):
c°Gelacio Juárez, UAM 161

3.6 Ejemplos
Figura 3.37: Armadura: a) reacciones y b) elementos mecánicos.
=(34 )(34)
3 +
(1)
4 +
(−54 )(−54)2
5 =307
32
(3.130)
el cual es igual al calculado en la ec. (3.99) con el 1 Teorema de Castigliano.
Cálculo del desplazamiento
Se aplica una carga vertical virtual unitario en el nodo de la armadura como se muestra en la
Fig. 3.38:
Figura 3.38: Armadura: a) reacciones y b) elementos mecánicos.
El desplazamiento se calcula de la ec. (3.128):
=(34 )(1)
3 +
(0)
4 +
(−54 )(0)2
5 =9
4
(3.131)
Cálculo del desplazamiento
Se aplica una carga horizontal virtual unitaria en el nodo de la armadura como se muestra en
la Fig. 3.39:
El desplazamiento se calcula de la ec. (3.128):
=(34 )(0)
3 +
(1)
4 +
(−54 )(0)2
5 = 4
(3.132)
c°Gelacio Juárez, UAM 162

3.6 Ejemplos
Figura 3.39: Armadura: a) reacciones y b) elementos mecánicos.
3.6.4. Ejemplo
Determine los desplazamientos , ,
y en el arco mostrado en la Fig. 3.27. Considérese
únicamente la energía por flexión.
Figura 3.40: Arco.
Las reacciones y elementos mecánicos se muestran en la Fig. 3.41.
Figura 3.41: Arco: a) reacciones y b) momento.
El desplazamiento se calcula sólo con la contribución de la energía por flexión en de la ec.
(3.115):
c°Gelacio Juárez, UAM 163

3.6 Ejemplos
=
Z
0
(3.133)
Cálculo del desplazamiento
Colocando una carga horizontal virtual unitaria en el punto b del arco se tiene las reacciones y
momentos en la Fig. 3.42:
Figura 3.42: Arco con carga virtual horizontal en b : a) reacciones y b) momento.
Sustituyendo el valor de los momentos de las Figs. 3.41 y 3.42 en la ec. (3.133) se tiene:
=
Z 2
0
(sin − 1) 1 (sin − 1)
(3.134)
Integrando (3.134), el valor del desplazamiento es:
=3 (3 − 8)
8(3.135)
Cálculo del desplazamiento
Colocando una carga horizontal virtual unitaria en el punto c del arco se tiene las reacciones y
momentos en la Fig. 3.43:
Figura 3.43: Arco con carga virtual horizontal en b : a) reacciones y b) momento.
Sustituyendo el valor de los momentos de las Figs. 3.41 y 3.43 en la ec. (3.133) se tiene:
=
Z 2
0
(sin − 1) 1 (sin )
(3.136)
Integrando (3.136) se tiene:
c°Gelacio Juárez, UAM 164

3.6 Ejemplos
=3 ( − 4)
4(3.137)
Cálculo del desplazamiento
Colocando una carga vertical virtual unitaria en el punto c del arco se tiene las reacciones y
momentos en la Fig. 3.44:
Figura 3.44: Arco con carga virtual horizontal en b : a) reacciones y b) momento.
Sustituyendo el valor de los momentos de las Figs. 3.41 y 3.44 en la ec. (3.133) se tiene:
=
Z 2
0
(sin − 1) (cos + 1)
(3.138)
Integrando la ec. (3.138) se tiene:
=3 (1− )
2(3.139)
Cálculo del giro
Colocando un momento flexionante virtual unitario en el punto c del arco se tiene las reacciones
y momentos en la Fig. 3.45:
Figura 3.45: Arco con carga virtual horizontal en b : a) reacciones y b) momento.
Sustituyendo el valor de los momentos de las Figs. 3.41 y 3.45 en la ec. (3.133) se tiene:
=
Z 2
0
(sin − 1) 1
(3.140)
Integrando (3.140) se tiene:
c°Gelacio Juárez, UAM 165

3.6 Ejemplos
=2 (2− )
2(3.141)
3.6.5. Formulas de integración
Zsin = − cos Zcos = sin Z
(sin )2 = −12sin cos +
1
2Z
(cos )2 =1
2sin cos +
1
2Z
sin cos =1
2(sin )2
3.6.6. Ejemplo
Determine el desplazamiento en el tablero mostrado en la Fig. 3.23 con el método de la carga
virtual unitaria, considérese una carga = 300 kg. Los elementos mecánicos se muestran en la
Fig. 3.46.
Figura 3.46: Elementos mecánicos porla carga real del tablero.
Se aplica una carga unitaria en dirección vertical como se muestra en la fig.3.47 con sus respectivos
c°Gelacio Juárez, UAM 166

3.6 Ejemplos
elementos mecánicos.
Figura 3.47: Elementos mecánicos carga virtual unitaria.
El desplazamiento se calcula con la contribución de la energía por fuerza normal en x, a flexión
en z y a cortarte de la ec. (3.115)
=
Z
0
+
Z
0
+
Z
0
(3.142)
Sustituyendo los elementos mecánico de las Figs. 3.46 y 3.47 en la ec. (3.142), el desplazamiento
calcula como:
=
Z 2√10
0
¡√10¢ ¡1√10¢
+
Z 25
0
( ) (1)
+
Z 2√10
0
¡−3√10¢ ¡−3√10¢
+
Z 25
0
0 (3.143)
+
Z 2√10
0
¡−3√10¢ ¡−3√10¢
+
Z 25
0
(−3 ) (−3)
Integrando (3.143) se tiene:
= 2816
+ 2846
+ 31986
(3.144)
Considerando una sección circular hueca, OC 102×574, cuyas propiedades geométricas son:
c°Gelacio Juárez, UAM 167

3.6 Ejemplos
= 2 = 21× 1010m2 = 1729× 10−3m2 = 8077× 109m2 = 1993× 10−6m4 = 03
El desplazamiento en el extremo del claro, , se obtiene de la ec. (3.144) :
= 23267× 10−5| z 001%
+ 12228× 10−4| z 005%
+ 022927| z 9994%
= 022942m (3.145)
c°Gelacio Juárez, UAM 168