planos en r3.docx
TRANSCRIPT
MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
1 PLANOS EN R3
Así como una recta esta determinada por dos puntos distintos, un plano está determinado por tres puntos no colineales.
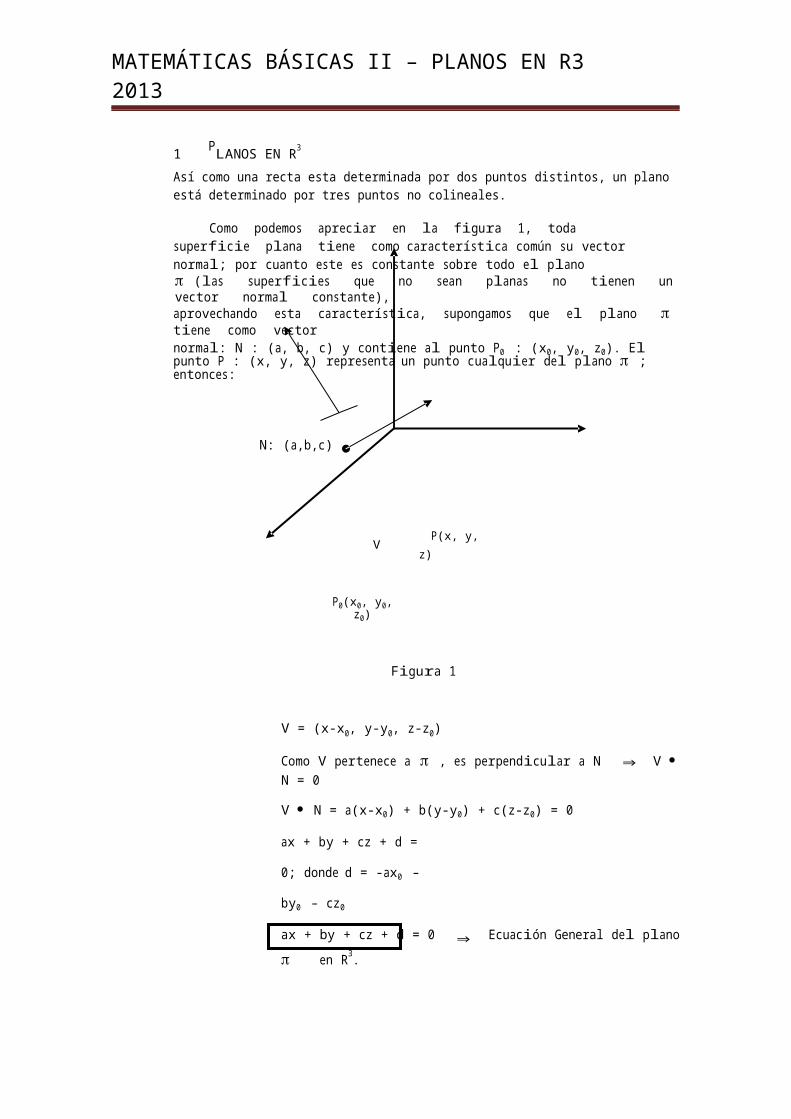
Como podemos apreciar en la figura 1, toda superficie plana tiene como característica común su vector normal; por cuanto este es constante sobre todo el plano (las superficies que no sean planas no tienen un vector normal constante),aprovechando esta característica, supongamos que el plano tiene como vectornormal: N : (a, b, c) y contiene al punto P0 : (x0, y0, z0). El punto P : (x, y, z) representa un punto cualquier del plano ; entonces:
N: (a,b,c)
π
VP(x, y, z)
P0(x0, y0, z0)
Figura 1
V = (x-x0, y-y0, z-z0)
Como V pertenece a , es perpendicular a N ⇒ V N = 0
V N = a(x-x0) + b(y-y0) + c(z-z0) = 0
ax + by + cz + d = 0; donde
d = -ax0 – by0 – cz0
ax + by + cz + d = 0 ⇒ Ecuación General del plano en R3.

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Donde: a, b, c son las coordenadas del vector normal y d se puede calcular remplazando en la ecuación del plano el punto P0.
Recordemos que para encontrar la ecuación matemática de los puntos que pertenece a un plano, se utiliza como referencia el vector normal al plano. Todo plano tiene dos vectores normales, como lo indica la figura 2:
Para efecto de encontrar laecuación del plano nos podemos referir a cualquiera de estos vectores normales indistintamente
Figura 2
Un plano está definido por:
a) Su vector normal y un punto del plano b) Tres puntos no alineadosc) Una recta y un punto fuera de ella d) Dos rectas que se cortene) Dos rectas paralelas no alabeadas
Caso (a):
Ejemplo 1 Encontrar la ecuación del plano perpendicular al vector 2i – j + 4ky que contiene al punto (1, -1, 2).
Solución: N : (2, -1, 4)
Entonces:
2x – y + 4z + d = 02(1) – (-1) + 4(2) + d = 0d = -11
2x – y + 4z = 11, es la ecuación del plano
Caso (b):
Ejemplo 2 Encontrar la ecuación del plano que contiene a los puntos:(2, 2, -3); (3, -1, 4); (-2, 5, 3)

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Solución: Sin importarnos que la ubicación de los puntos no sea la correcta, razonemos este ejercicio con la ayuda de la figura 3
N π.
P3
V2
. V1
P2P1
Figura 3
P1 : (2, 2, -3)P2 : (3, -1, 4) P3 : (-2, 5, 3)
V1 : (1, -3, 7) V2 : (-4, 3, 6)
i
N 1 4
j k
3 7 (39,34,9)
3 6

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
39x 34 y 9 z d 0 39(2) 34(2) 9(3) d 0⇒ d 119
39x 34 y 9 z 119 039 x 34 y 9 z 119
2 DISTANCIA DE UN PUNTO A UN PLANO
Sea “dis” la distancia de un punto cualquiera a un plano; si el punto no pertenece al plano dis > 0, si el punto pertenece al plano dis = 0, para efecto del análisis que vamos hacer supongamos que el punto no pertenece al plano; entonces:
dis 0 ⇒ Po P0 ( x0 , y 0 , z 0 ) , en la figura 4 podemos ver el razonamiento de este
procedimiento:
Z
P0: (x0, y0, z0)“
“dis”V N
P: (x, y,z)
Y
X
Figura 4

o
MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
dis: Proyección escalar de V sobre NDado el plano ax + by + cz + d = 0 y el punto P0 = (x0, y0, z0)
V : ( xo x, yo y, zo z)
N : (a, b, c)
Nˆ
(a, b, c)
a 2 b 2 c 2
dis ( xo
x, yo y, z o z ) (a, b, c)
a 2 b 2 c 2
dis 1
a( xa 2 b 2 c 2 x) b( y o y ) c( z o z )
dis a ( xo ) ax b( yo ) by c( z o ) cz
a 2 b 2 c 2
dis y| axo byo czo d |
a 2 b 2 c 2
Ejemplo 3 Encontrar la distancia del punto P0 : (-1, 2, -4) al plano quecontiene a los puntos (2, -2, 4); (1, 1, 1); (-2, 3, 1)
Solución: Encontremos primero la ecuación del plano; V1, V2 son vectores del plano y N es su vector normal
V1 (1,1,1) (2,2,4) (1,3,3)
V2 (2,3,1) (2,2,4) (4,5,3)
i j
N 1 3
4 5
k
3 ( 6,9,7 )
3

ˆ
38
166
MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
6x 9 y 7 z d 06 9 7 d 0 ⇒ d 22
6x 9 y 7 z 22 0
Analicemos si P0 pertenece o no al plano.
6(1) 9(2) 7(4) 22 0
6 18 28 22 0P0 al plano; d > 0.
Encontremos un vector V, que une un punto del plano con P0.
V (1,2,4) (1,1,1) (2,1,5)
dis V Nˆ
6,9,7N
166
d 1 2,1,5 6,9,7166
d 1
12 9 35
166
Ejemplo 4 Hal lar la d istancia del punto
P(3, 1, −2) a los p lanos
y .
Ejemplo 5 Hal lar la d istancia del punto
Q(5,5,3)alp lano
.

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Distancia entre planos paralelos
Para calcular la distancia entre dos
planos paralelos , se hal la la d istancia de
un punto cualquiera de uno de el los a l
otro.
También se puede calcular de esta
otra forma:
Ejemplo
Calcular la d istancia entre los p lanos
y
.
Los dos planos son parale los.
Transformamos la ecuación del
segundo plano para que los dos planos
tengan el mismo vector normal .

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
3.- CASOS ESPECIALES DE PLANOS
Los planos en R3 pueden ser paralelos a los planos coordenados o paralelos a los ejes coordenados, veamos como se observa este efecto en la ecuación del plano. La
figura 2-8 indica tanto el paralelismo con respecto alplano
" xy" ;
z k (caso a)
como el paralelismo con respecto al eje " x" ; by cz d 0 (caso b).
Viendo esta figura podemos concluir:
a = 0 ⇒ indica paralelismo con respecto al “eje x”, figura 8 (b)b = 0 ⇒ indica paralelismo con respecto al “eje y”c = 0 ⇒ indica paralelismo con respecto al “eje z”

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Z
a )
Z = K
K
Y
X Z
b )
by + cz + d=0Y
X Figura 8
La coordenada del vector normal que es cero indica la naturaleza del ejecoordenado al cual el plano es paralelo.
De igual forma podemos comprender que:
a = 0, b = 0 ⇒ indica paralelismo con respecto al plano “xy”, figura 8 (a)a = 0, c = 0 ⇒ indica paralelismo con respecto al plano “xz”b = 0, c = 0 ⇒ indica paralelismo con respecto al plano “yz”

l
MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Las coordenadas del vector normal que son cero indican la naturaleza del plano coordenado al cual el plano es paralelo.
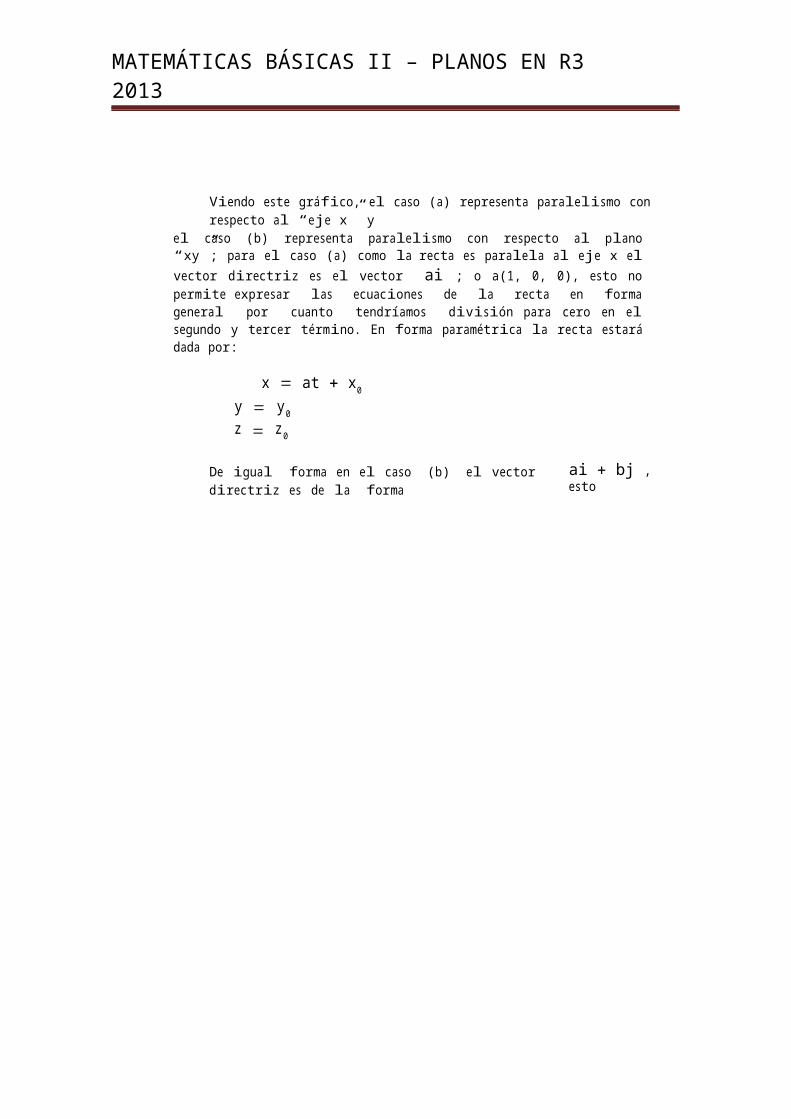
De igual forma la recta en R3 puede ser paralela a los planos o a los ejes coordenados; veamos en la figura 9 este efecto sobre las ecuaciones de la recta.
Za )
Y
XZ
b )
l
Y
Figura 9X

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
Viendo este gráfico, el caso (a) representa paralelismo con respecto al “eje x” yel caso (b) representa paralelismo con respecto al plano “xy”; para el caso (a) como la recta es paralela al eje x el vector directriz es el vector ai ; o a(1, 0, 0), esto no permite expresar las ecuaciones de la recta en forma general por cuanto tendríamos división para cero en el segundo y tercer término. En forma paramétrica la recta estará dada por:
x at x0
y y0
z z0
De igual forma en el caso (b) el vector directriz es de la forma ai bj , esto

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
también no permite expresar esta recta en forma general por tener división para cero en su tercer término. En forma paramétrica la recta estará dada por:
x at x0
y bt y0
z z0
Esta observación nos permite hacer la siguiente conclusión:
a = 0 ⇒ indica paralelismo con respecto al plano “yz”b = 0 ⇒ indica paralelismo con respecto al plano “xz”c = 0 ⇒ indica paralelismo con respecto al plano “xy”
Las coordenadas del vector directriz que no son cero indican la naturaleza del plano coordenado al cual la recta es paralela.
De igual forma podemos comprender que:
a = 0, b = 0 ⇒ indica paralelismo con respecto al eje “z”a = 0, c = 0 ⇒ indica paralelismo con respecto al eje “y”b = 0, c = 0 ⇒ indica paralelismo con respecto al eje “x”
La coordenada del vector directriz que no es cero indica la naturaleza del eje coordenado al cual la recta es paralela.
MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
3.- PARALELISMO Y PERPENDICULARIDAD ENTRE PLANOS
Consideremos los Planos
Π1 : a1 x + b1 y + c1 z = d1 y Π2 : a2 x + b2 y + c2 z = d2−→ −→
Entonces, siendo N1 = (a1 , b1 , c1 )N2 = (a2 , b2 , c2 ), normales a Π1 y Π2 , respectivamente,−→ −→
Π1 k Π2 si y sólo si N1 k N2−→ −→
Π1 Π2 si y sólo si N1 N2⊥ ⊥
N2
N1
Y
X

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
4.-INTERSECCION DE PLANOS
Dos Planos P1 : A1x + B1y + C1z + D = 0 y P2 : A2x + B2y + C2z + D2 = 0 , cuyos vectores normales no son paralelos se intersecan en una recta L. esta recta recibe el nombre de Recta de intersección de planos. Como todo punto de la recta L pertenece también a ambos, su ecuación cartesiana o bipolar suele escribirse de la forma.
A1x + B1y + C1z + D = 0
L :
A2x + B2y + C2z + D2 = 0
Si n1 es un normal al plano P1 y n2 es un normal al plano P2, entonces un vector de dirección de L esta dado por:
a = n1 x n2
Para determinar L vectorialmente bastara obtener al menos las coordenadas de un punto S sobre L, sabiendo que pertenece también a los planos P1 y P2, y si P(x,y,z) representa un punto cualquiera de L en el espacio, entonces:
L: P = S + t (n1 x n2)
Es una ecuación paramétrica vectorial de L
Ejemplo 01.- hallar la ecuación paramétrica vectorial de la recta de intersección de los planos P1 : x -2y + z = 0 y P2 : 3x + y + 2z -7 = 0
Solución. Los vectores normales de ambos planos son n1 = (1, -2, 1) y n2 = (3, 1, 2 ) entonces un vector de dirección de la recta de intersección es :
i j k
a = n1 x n2 = 1 -2 1 = (-5, 1, 7)

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
3 1 2
Como la coordenada de z de a no es cero la recta L no es paralela al plano XY , y se puede sustituir a z por cero en las ecuaciones de los planos para obtener el punto S de interseccion de L y el punto XY. Esto es, Si
Z = 0
TRAZAS DE UN PLANO
La intersección de un plano P en el espacio con uno de los planos coordenados recibe en nombre de Traza de P en ese plano para facilitar en trazado de su grafica. En la figura xxx se muestra la parte de un plano, con ecuación
P = 2x + 4y + 3z – 12 = 0 (1)
Que está en el primer octante.
La traza del plano P en (1) obtenemos la ecuación de la traza en YZ, o sea:
4y + 3y = 12
Finalmente, haciendo y = 0 en (1) obtendremos la ecuación de la traza en XZ : 2x + 3z = 12
ECUACIÓN SIMÉTRICA DEL PLANO.
Si en la ecuación del plano P: Ax + By + Cz + D = 0 ninguno de los coeficientes A, B, C es igual a cero esta ecuación se puede transformar a la forma

MATEMÁTICAS BÁSICAS II – PLANOS EN R3 2013
P : x + y + z = 1
a b c
En donde a = -D/A, b = - D/B y c = -D/C son las magnitudes de los segmentos que el plano P intercepta en los ejes X, Y, y Z respectivamente. La ecuación (9) se llama ecuación segmentaria o simétrica del plano.
Ejemplo
La ecuaciones de las intersecciones de un plano P con el plano XY y el plano YZ son las rectas L1 : 2x – y – 7 = 0, z =0 y L2 = y + 3z + 7 = 0, x = 0 respectivamente. Hallar la ecuación de dicho plano P.