p0x control de motor paso
TRANSCRIPT

Microcontroladores PIC Docente: Ing. Roger Guachalla Narvá[email protected]
PRACTICA: Control de Motor Paso a Paso1. Objetivos:
Utilizando el microcontrolador PIC18F4550, realizar el control de:
Estado del Motor: Activado /Apagado Dirección de Giro: Horario/Anti horario Valores de Retardo de Giro: desde 0 hasta 7
Para un Motor paso a paso unipolar en modo Paso Simple.El circuito se simulará en Proteus-ISIS y se armará en Protoboard
2. Teoría:Los Motores Paso a Paso (Step Motors) son muy distintos a los motores DC regulares. En vez de girarcontinuamente como los motores DC, los motores Paso se mueven en un determinado ángulo de recorrido(STEP) con cada secuencia de pulso. Por ejemplo, un motor de 1.8 grados de recorrido requerirá 200 Stepspara completar una vuelta completa (360°/1.8°=200).Un motor paso consiste de un rotor (magneto permanente que rota dentro), y un estator (cuatro bobinas(coils) que son parte de la carcasa y que no se mueven). El rotor puede moverse aplicandosecuencialmente un voltaje DC a uno o dos bobinas al mismo tiempo.
Driver de corriente:
Para mover el rotor se requiere un driver de corriente. El driver aplica un voltaje con elevada corriente acualquiera de las 4 bobinas del estator. Los drivers pueden ser circuitos CI como el ULN2003, cuatrotransistores Darlington ó cuatro transistores de potencia como el 2N3055. Existen circuitos máselaborados (complejos y costosos) que permiten manejar mayores voltajes y corrientes.
Conexiones de las Bobinas (Coils):
Los motores unipolares tienen 5 o 6 hilos dependiendo del modelo. Si el motor tiene 6 hilos, se deben unirlos puntos medios de las bobinas y conectarlas al voltaje de alimentación del motor (+5, +12, +24 volt,etc.). Los extremos de cada bobina deben ser conectados al driver de corriente como se muestra en eldiagrama esquemático.
Parámetros de un Motor Paso:
Unipolar o Bipolar Paso (Grados) Voltaje de Alimentación Máxima Corriente Torque Velocidad
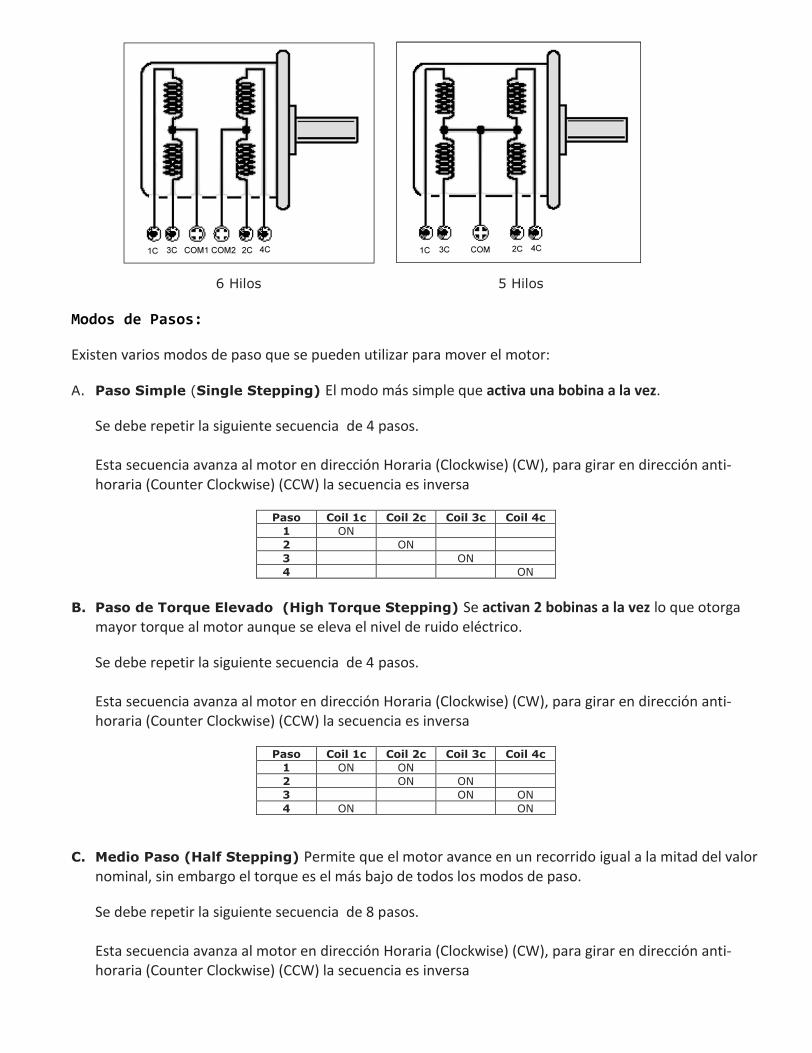
6 Hilos 5 Hilos
Modos de Pasos:
Existen varios modos de paso que se pueden utilizar para mover el motor:
A. Paso Simple (Single Stepping) El modo más simple que activa una bobina a la vez.
Se debe repetir la siguiente secuencia de 4 pasos.
Esta secuencia avanza al motor en dirección Horaria (Clockwise) (CW), para girar en dirección anti-horaria (Counter Clockwise) (CCW) la secuencia es inversa
Paso Coil 1c Coil 2c Coil 3c Coil 4c1 ON2 ON3 ON4 ON
B. Paso de Torque Elevado (High Torque Stepping) Se activan 2 bobinas a la vez lo que otorgamayor torque al motor aunque se eleva el nivel de ruido eléctrico.
Se debe repetir la siguiente secuencia de 4 pasos.
Esta secuencia avanza al motor en dirección Horaria (Clockwise) (CW), para girar en dirección anti-horaria (Counter Clockwise) (CCW) la secuencia es inversa
Paso Coil 1c Coil 2c Coil 3c Coil 4c1 ON ON2 ON ON3 ON ON4 ON ON
C. Medio Paso (Half Stepping) Permite que el motor avance en un recorrido igual a la mitad del valornominal, sin embargo el torque es el más bajo de todos los modos de paso.
Se debe repetir la siguiente secuencia de 8 pasos.
Esta secuencia avanza al motor en dirección Horaria (Clockwise) (CW), para girar en dirección anti-horaria (Counter Clockwise) (CCW) la secuencia es inversa
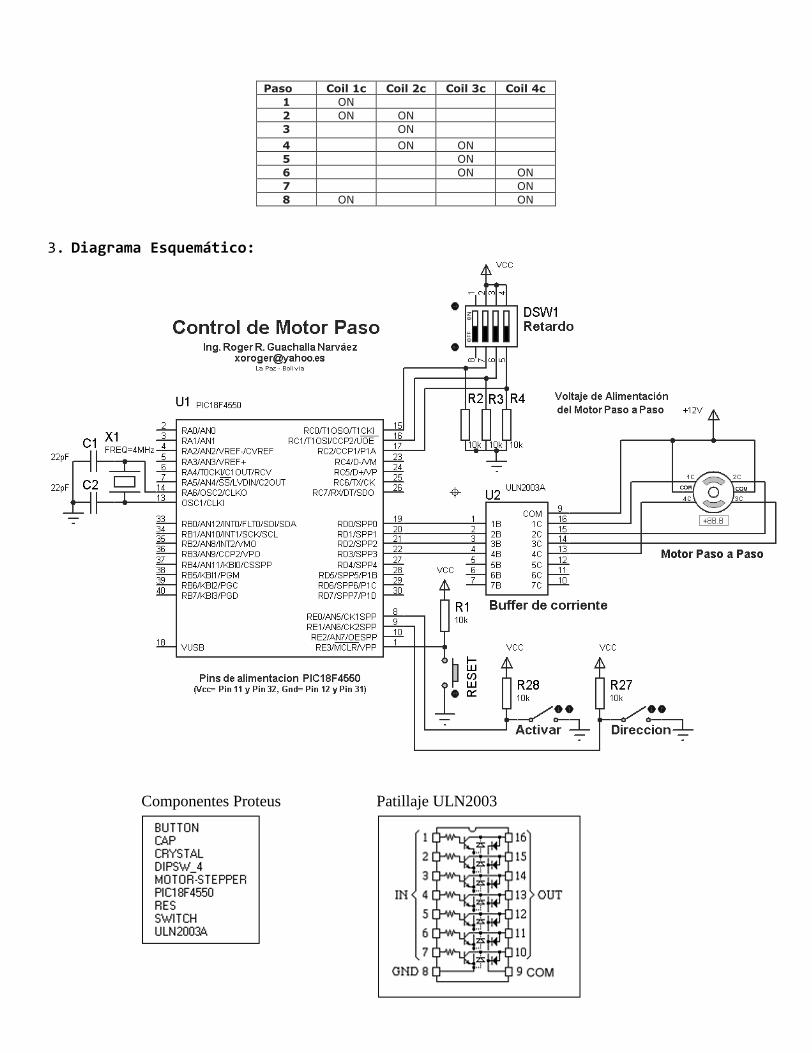
Paso Coil 1c Coil 2c Coil 3c Coil 4c1 ON2 ON ON3 ON
4 ON ON5 ON6 ON ON7 ON8 ON ON
3. Diagrama Esquemático:
Componentes Proteus Patillaje ULN2003

4. Código Fuente MikroBasic Pro:

5. Trabajo en Laboratorio
a) 1era Firma:
Simular en Proteus y Armar el circuito en protoboard probando su funcionamiento. Calibrar los valores de Retardo para lograr una gradual máxima velocidad de giro posible.
b) 2da Firma:
Modificar el circuito y el programa para que se permita la selección de Modo de Paso a través de 2micro-switch (puerto RB.0 y RB.1 )de acuerdo a la siguiente tabla:
Modo00 : Paso Simple01 : Paso Doble1x : Medio Paso
Adicionalmente se debe permitir girar al motor el Número de pasos (de 0 a 63) indicados por 6micro- switch (puerto RB.2 y RB.7)
6. Informe de la Práctica: Control de motor Paso
I. Imprimir el Diagrama Esquemático y el Código Fuente en MikroBasic usados para realizar el incisob) 2da Firma del Trabajo en Laboratorio
II. TRABAJO DE INVESTIGACION:Cada trabajo de investigación debe incluir:
Resumen escrito a mano (de un mínimo de 2 páginas) Fuentes de Información (direcciones web, bibliografía) Copias impresas de la información adquirida a través de las fuentes
Controladores de Motor Paso a PasoEl chip ULN2003A es apropiado para manejar motores de baja potencia. Investigar y explicar elfuncionamiento (mostrando el diagrama esquemático) para controladores de motor paso de mayorpotencia.
Motor Paso BipolarIndicar las características y parámetros, teoría de funcionamiento y el hardware controladorrequerido para el uso de motores paso a paso bipolares.
III. Conclusiones