Índice tema 1 introducción al control por realimentación …alamo/archivos/capitulo_1.pdftema 1...
TRANSCRIPT
Tema 1 Introducción al control
por realimentación
Control Automático III-Ing. Industriales
Escuela Superior de IngenierosUniversidad de Sevilla
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
Motivación de la ingeniería de control
El control por realimentación tiene una larga historia que comienza con el deseo de los humanos en manejar los materiales y fuerzas de la naturaleza en su propio beneficio.
Ejemplos tempranos de sistemas de control incluyen sistemas de regulación en relojes y mecanismos para mantener molinos de viento orientados.
Las plantas industriales actuales tienen sistemas de control sofisticados que son necesarios para su correcto funcionamiento.
Una planta industrial moderna: Una sección de la Refinería de crudo OMV en Austria
Importancia de la ingeniería de control
La ingeniería de control tiene una gran trascendencia en la sociedad (tecnología oculta) La mayor parte de los sistemas modernos (aviación, trenes de alta velocidad, reproductores de CD, … ) no podrían funcionar sin la ayuda de sofisticados sistemas de control.
El control es la clave para el funcionamiento de la tecnología:
Mejora en la calidad del productoIncremento de la productividadMinimización del gasto Ahorro energéticoProtección medioambientalMayor producción para una capacidad instalada dada espacian la actualización de las plantas, yMayor margen de beneficios
Motivos del control mejorado
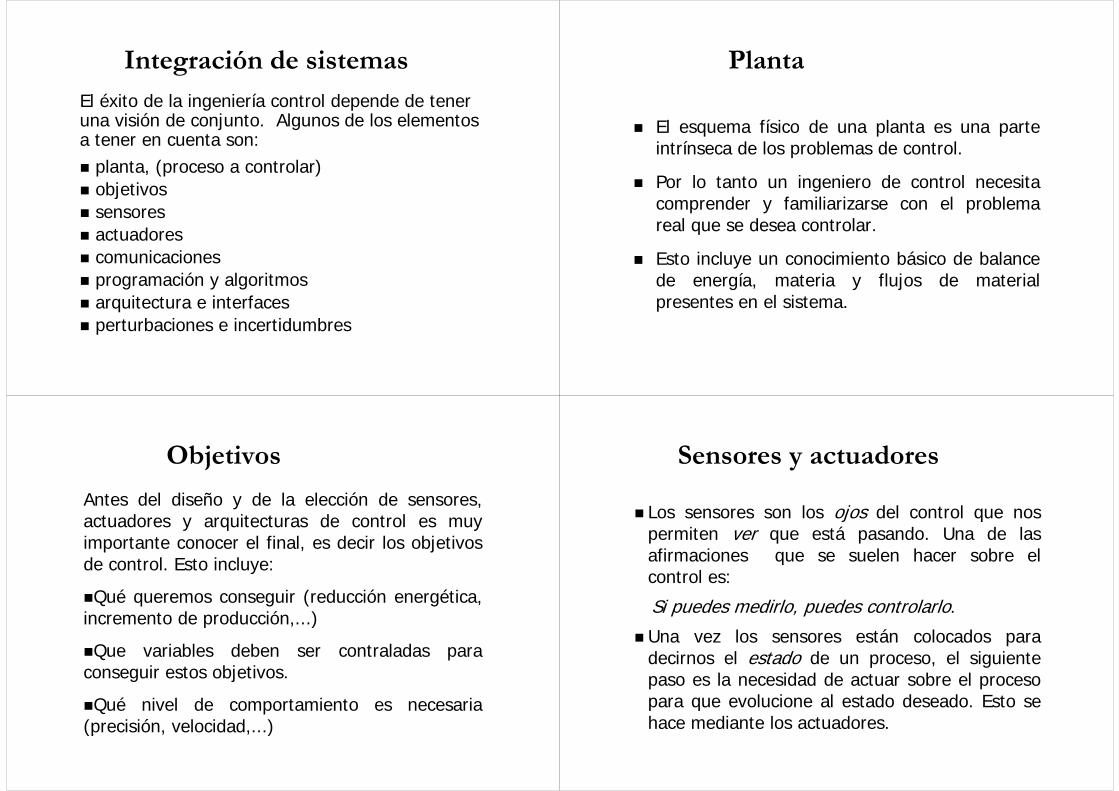
Proceso esquemático de una planta de amoníaco
Todos los puntos mencionados anteriormente son relevantes en el control de una planta integrada como la siguiente
Motivos del controlTipos de diseño de sistemas de control
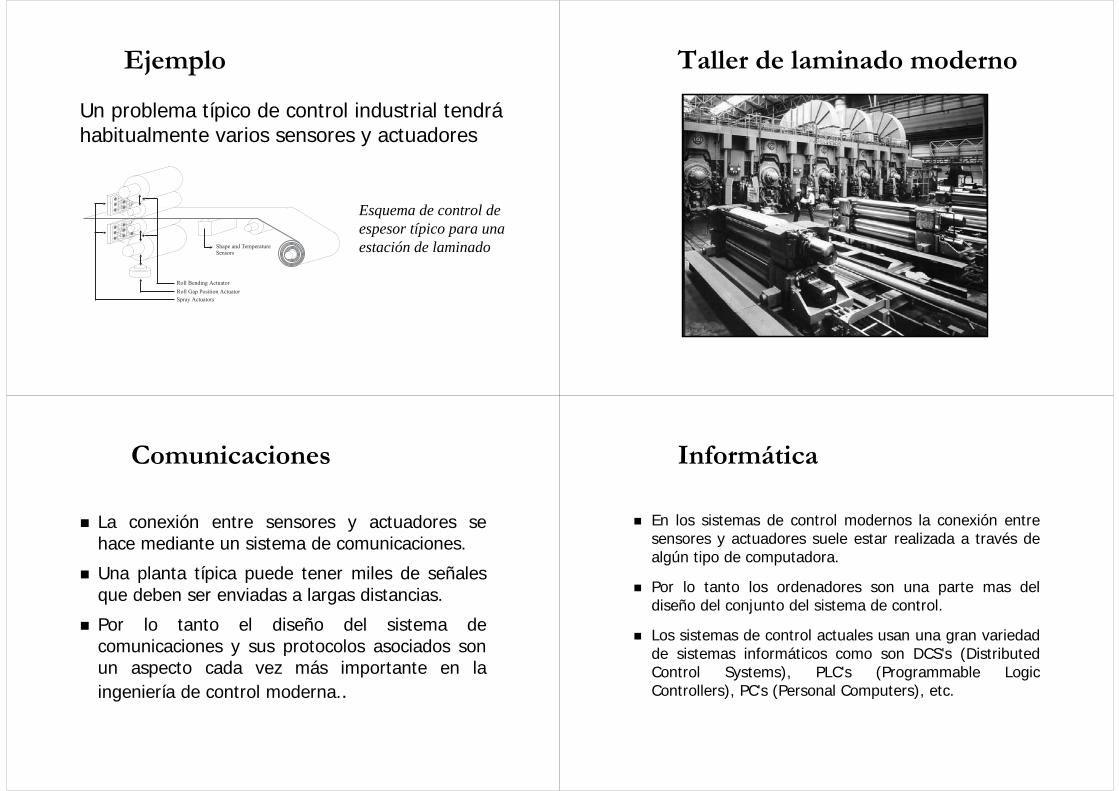
Los sistemas de control toman también distintas formas y requieren diferentes formas de atacar el problema.
Control continuo Control de eventos discretos(Autómata)
Integración de sistemasEl éxito de la ingeniería control depende de tener una visión de conjunto. Algunos de los elementos a tener en cuenta son:
planta, (proceso a controlar) objetivossensoresactuadorescomunicacionesprogramación y algoritmosarquitectura e interfacesperturbaciones e incertidumbres
Planta
El esquema físico de una planta es una parte intrínseca de los problemas de control.
Por lo tanto un ingeniero de control necesita comprender y familiarizarse con el problema real que se desea controlar.
Esto incluye un conocimiento básico de balance de energía, materia y flujos de material presentes en el sistema.
Objetivos
Antes del diseño y de la elección de sensores, actuadores y arquitecturas de control es muy importante conocer el final, es decir los objetivos de control. Esto incluye:
Qué queremos conseguir (reducción energética, incremento de producción,...)
Que variables deben ser contraladas para conseguir estos objetivos.
Qué nivel de comportamiento es necesaria (precisión, velocidad,...)
Sensores y actuadores
Los sensores son los ojos del control que nos permiten ver que está pasando. Una de las afirmaciones que se suelen hacer sobre el control es:
Si puedes medirlo, puedes controlarlo.
Una vez los sensores están colocados para decirnos el estado de un proceso, el siguiente paso es la necesidad de actuar sobre el proceso para que evolucione al estado deseado. Esto se hace mediante los actuadores.
Un problema típico de control industrial tendráhabitualmente varios sensores y actuadores
Esquema de control de espesor típico para una estación de laminado
Ejemplo Taller de laminado moderno
Comunicaciones
La conexión entre sensores y actuadores se hace mediante un sistema de comunicaciones.
Una planta típica puede tener miles de señales que deben ser enviadas a largas distancias.
Por lo tanto el diseño del sistema de comunicaciones y sus protocolos asociados son un aspecto cada vez más importante en la ingeniería de control moderna..
Informática
En los sistemas de control modernos la conexión entre sensores y actuadores suele estar realizada a través de algún tipo de computadora.
Por lo tanto los ordenadores son una parte mas del diseño del conjunto del sistema de control.
Los sistemas de control actuales usan una gran variedad de sistemas informáticos como son DCS's (DistributedControl Systems), PLC's (Programmable LogicControllers), PC's (Personal Computers), etc.
Arquitectura e interfaces
La decisión de “que conectar a qué” en el diseño de un sistema de control no es inmediata.
Al principio se puede pensar que lo mejor es llevar todos las señales a un lugar único (estación de control) para que cada acción de control se base en toda la información posible (control centralizado).
Sin embargo ésta casi nunca es la mejor solución. Hay buenas razones para evitar esta práctica: complejidad, coste, restricciones en el tiempo de computación, mantenimiento, fiabilidad, etc.
AlgoritmosFinalmente llegamos al verdadero corazón de la ingeniería de control: los algoritmos que conectan los sensores con los actuadores. Dentro del conjunto del sistema de control es fácil despreciar este aspecto del problema.
Un ejemplo simple cotidiano: jugar a nivel profesional al tenis.
Se puede ver fácilmente que es necesaria una buena visión (sensores) y potente musculatura (actuadores) para jugar bien al tenis, pero esto no es suficiente. Se requiere una buena coordinación entre vista y mano para conseguirlo (control).
Mejor ControlConsigue mayor destreza combinando los
sensores actuadores de forma más inteligente
Mejores actuadoresConsiguen mayor Musculatura
Mejores sensoresConsiguen mejor Visión
Algoritmos Perturbaciones e incertidumbres
Una de las cosas que hacen que se siga estudiando y mejorando el diseño de controladores es que los sistemas reales se ven afectados por perturbaciones externas y ruidos.
Estos factores pueden jugar un papel importante en el comportamiento del sistema..
Ejemplos sencillo, Los aviones están sujetos a perturbaciones en forma de turbulencias y los sistemas de control de crucero en los coches deben adaptarse a variaciones en el firme y a distintas cargas en el vehículo.
Homogeneidad
Un punto a tener en cuenta es que todos los sistemas interconectados, incluidos los sistemas de control, son tan buenos como lo son sus elementos mas débiles.
Esto implica que el diseño de sistemas de control debe intentar que todos los componentes (planta, sensores, actuadores, comunicaciones, sistemas informáticos, interfaces, algoritmos, etc.) tengan similar precisión y comportamiento.
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
A’
ym(t)
+
−y(t)u(t)r(t)
Measurement and signaltransmission system
PlantController
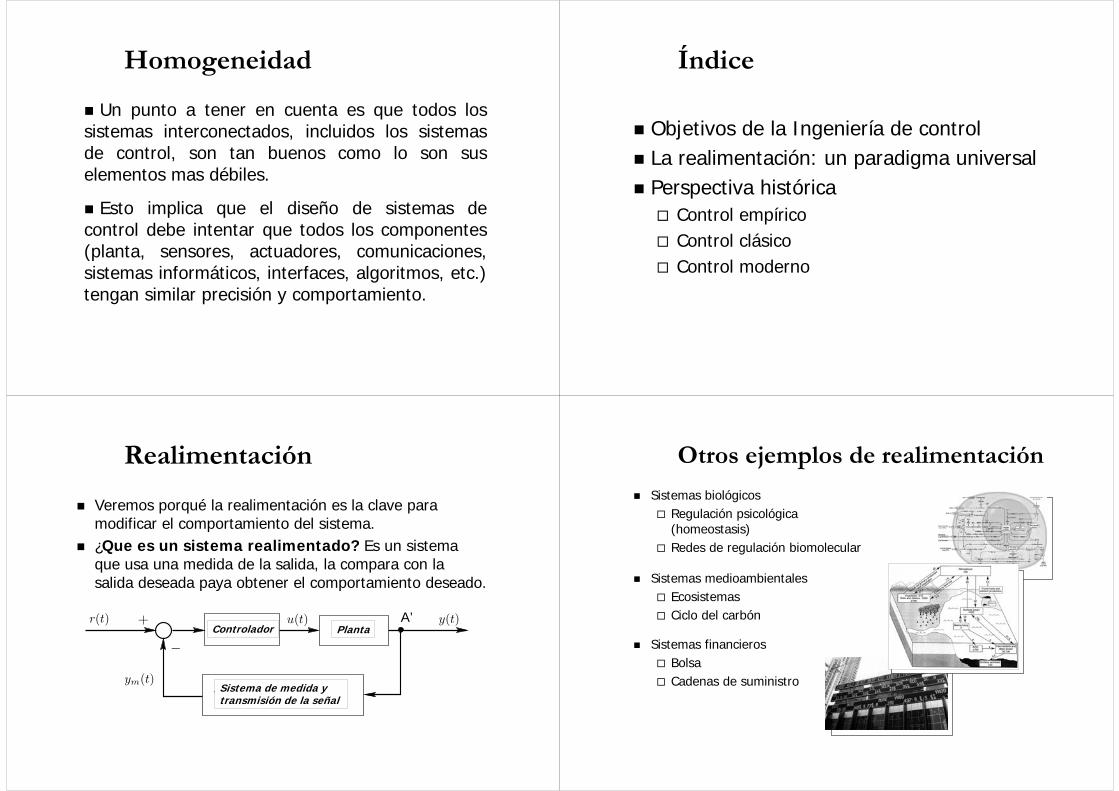
Veremos porqué la realimentación es la clave para modificar el comportamiento del sistema.¿Que es un sistema realimentado? Es un sistema que usa una medida de la salida, la compara con la salida deseada paya obtener el comportamiento deseado.
Realimentación
Controlador Planta
Sistema de medida y transmisión de la señal
Otros ejemplos de realimentación
Sistemas biológicosRegulación psicológica (homeostasis)Redes de regulación biomolecular
Sistemas medioambientalesEcosistemas Ciclo del carbón
Sistemas financierosBolsaCadenas de suministro
ESE
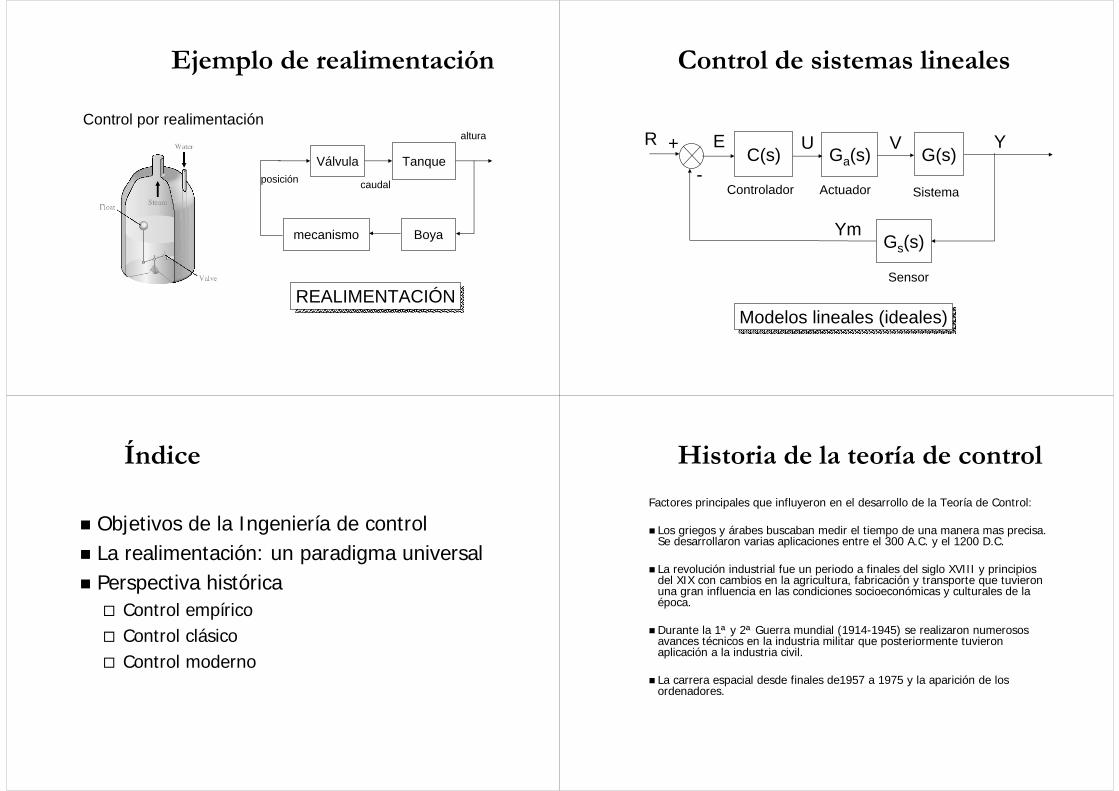
Ejemplo de realimentación
Control por realimentación
TanqueVálvula
caudal
altura
Boyamecanismo
posición
REALIMENTACIÓN
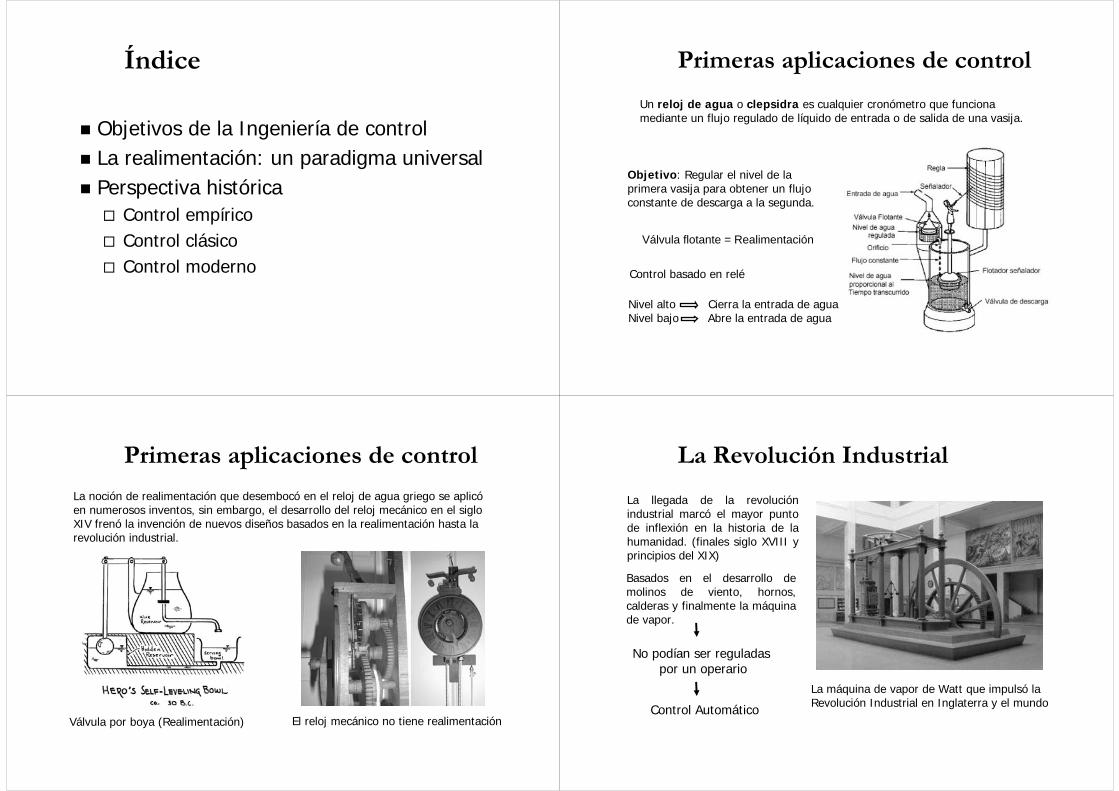
Control de sistemas lineales
Controlador
G(s)C(s)
Gs(s)
Ga(s)
Actuador Sistema
Sensor
-
+R E U Y
Ym
V
Modelos lineales (ideales)
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
Factores principales que influyeron en el desarrollo de la Teoría de Control:
Los griegos y árabes buscaban medir el tiempo de una manera mas precisa. Se desarrollaron varias aplicaciones entre el 300 A.C. y el 1200 D.C.
La revolución industrial fue un periodo a finales del siglo XVIII y principios del XIX con cambios en la agricultura, fabricación y transporte que tuvieron una gran influencia en las condiciones socioeconómicas y culturales de la época.
Durante la 1ª y 2ª Guerra mundial (1914-1945) se realizaron numerosos avances técnicos en la industria militar que posteriormente tuvieron aplicación a la industria civil.
La carrera espacial desde finales de1957 a 1975 y la aparición de los ordenadores.
Historia de la teoría de control
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
Primeras aplicaciones de control
Un reloj de agua o clepsidra es cualquier cronómetro que funciona mediante un flujo regulado de líquido de entrada o de salida de una vasija.
Objetivo: Regular el nivel de la primera vasija para obtener un flujo constante de descarga a la segunda.
Válvula flotante = Realimentación
Control basado en relé
Nivel alto Cierra la entrada de aguaNivel bajo Abre la entrada de agua
Primeras aplicaciones de control
La noción de realimentación que desembocó en el reloj de agua griego se aplicóen numerosos inventos, sin embargo, el desarrollo del reloj mecánico en el siglo XIV frenó la invención de nuevos diseños basados en la realimentación hasta la revolución industrial.
El reloj mecánico no tiene realimentaciónVálvula por boya (Realimentación)
La Revolución Industrial
La llegada de la revolución industrial marcó el mayor punto de inflexión en la historia de la humanidad. (finales siglo XVIII y principios del XIX)
La máquina de vapor de Watt que impulsó la Revolución Industrial en Inglaterra y el mundo
Basados en el desarrollo de molinos de viento, hornos, calderas y finalmente la máquina de vapor.
No podían ser reguladaspor un operario
Control Automático
La Revolución Industrial
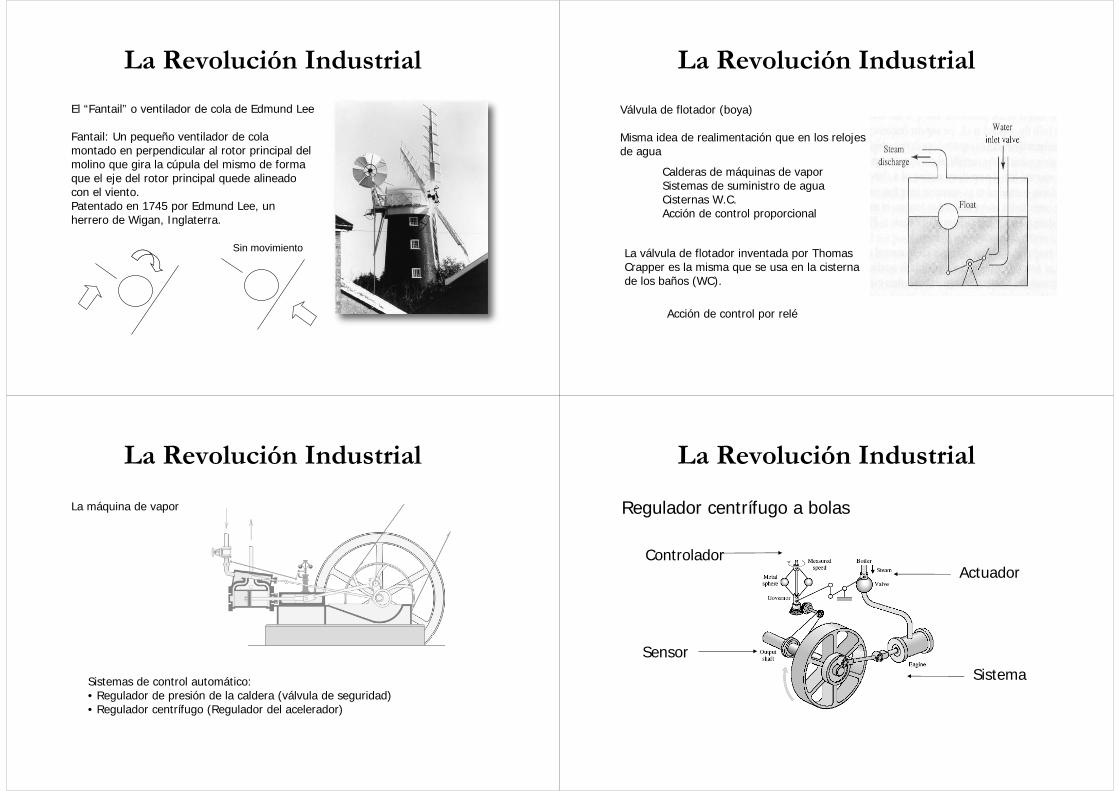
El “Fantail” o ventilador de cola de Edmund Lee
Fantail: Un pequeño ventilador de cola montado en perpendicular al rotor principal del molino que gira la cúpula del mismo de forma que el eje del rotor principal quede alineado con el viento.Patentado en 1745 por Edmund Lee, un herrero de Wigan, Inglaterra.
Sin movimiento
La Revolución Industrial
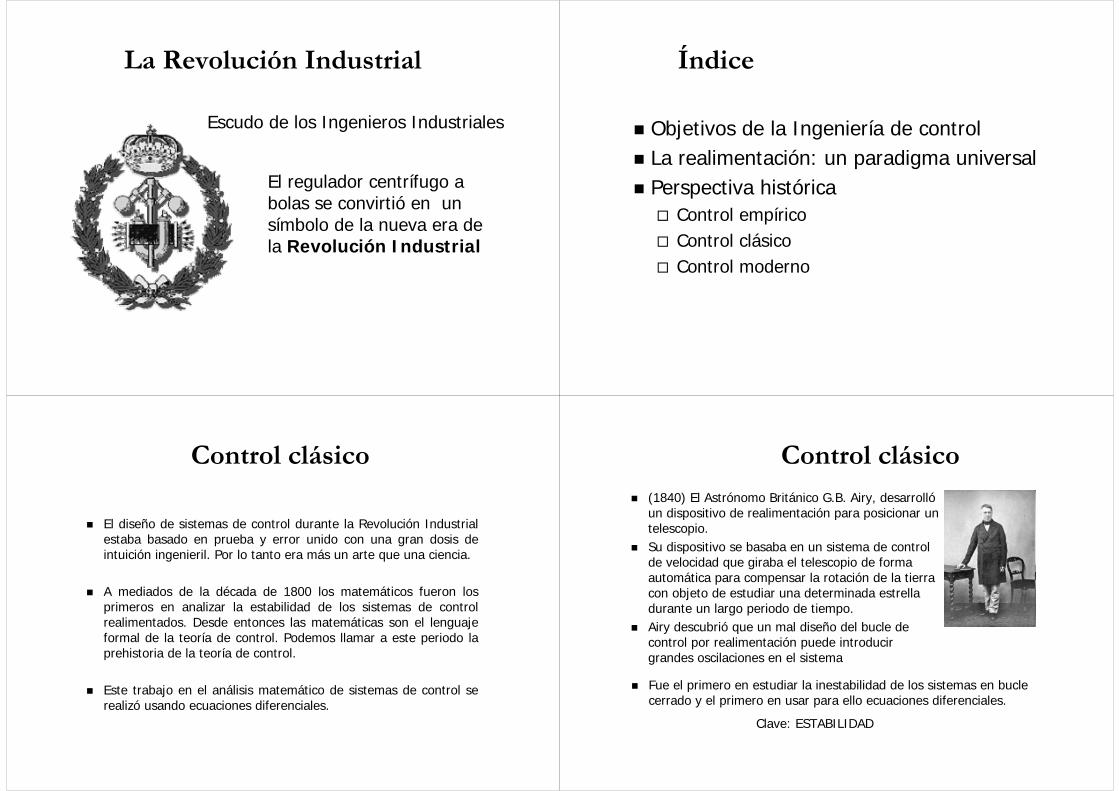
Válvula de flotador (boya)
Misma idea de realimentación que en los relojes de agua
Calderas de máquinas de vaporSistemas de suministro de aguaCisternas W.C.Acción de control proporcional
La válvula de flotador inventada por Thomas Crapper es la misma que se usa en la cisterna de los baños (WC).
Acción de control por relé
La Revolución Industrial
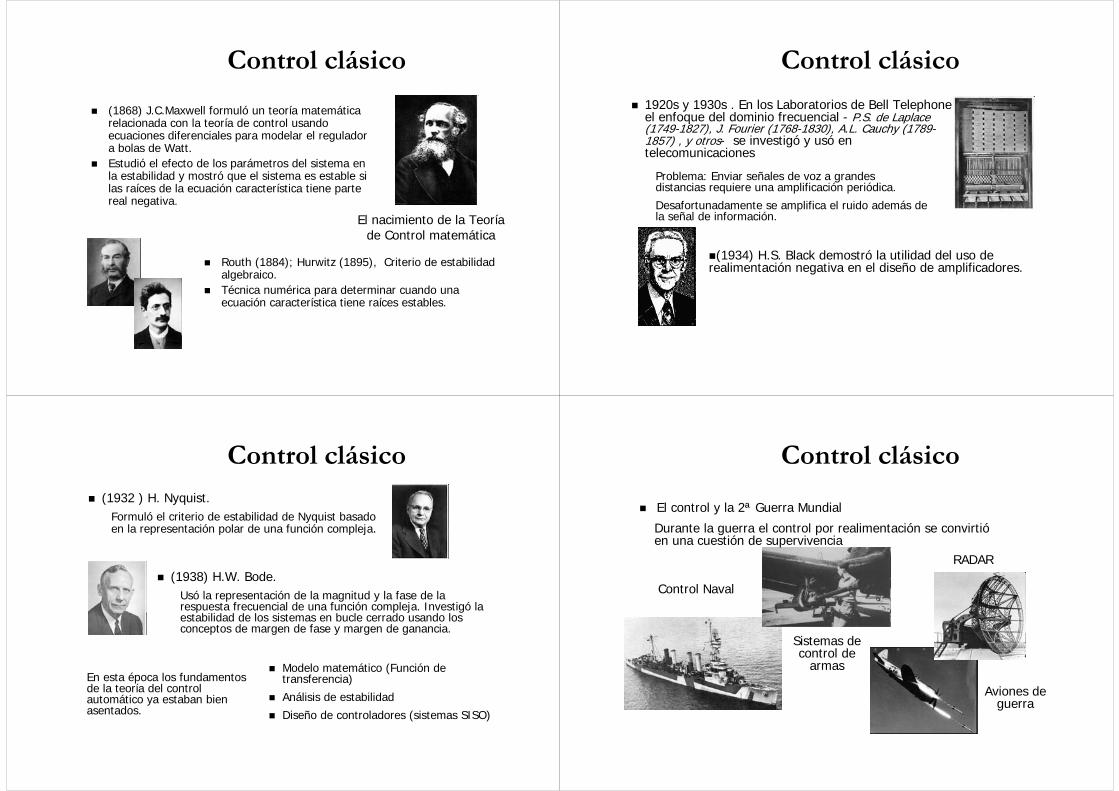
La máquina de vapor
Sistemas de control automático:• Regulador de presión de la caldera (válvula de seguridad)• Regulador centrífugo (Regulador del acelerador)
La Revolución Industrial
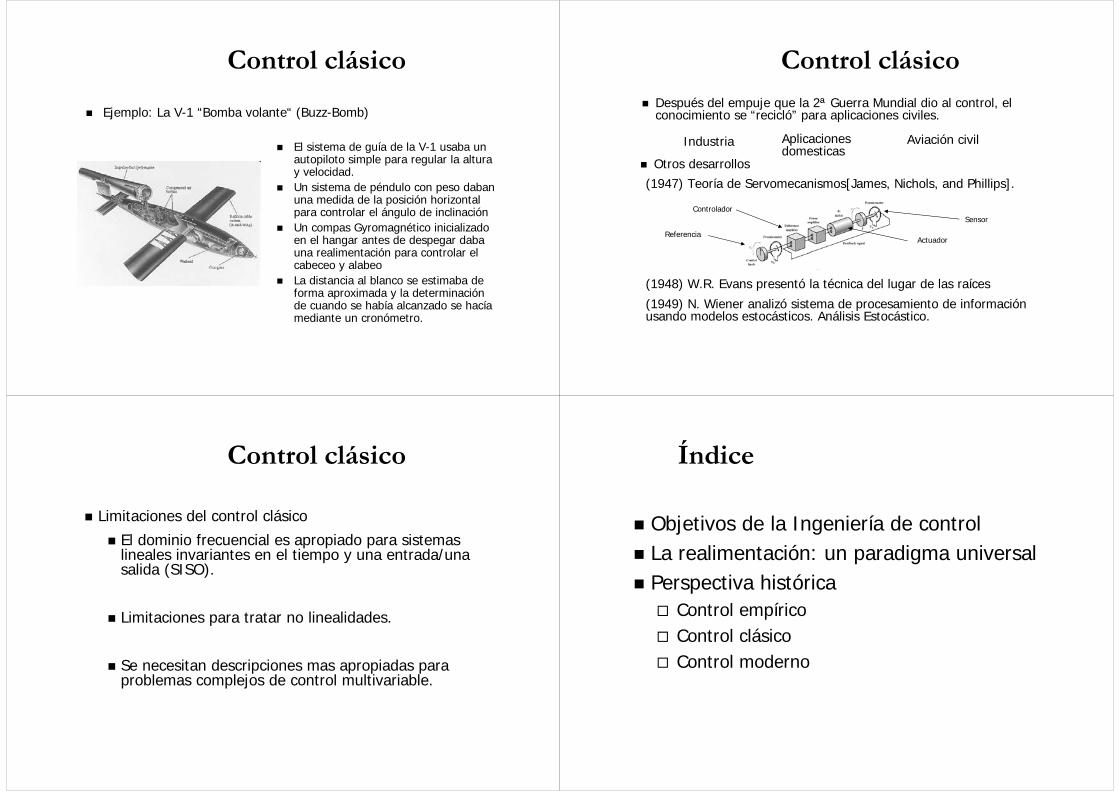
Actuador
Sensor
Controlador
Regulador centrífugo a bolas
Sistema
La Revolución Industrial
Escudo de los Ingenieros Industriales
El regulador centrífugo a bolas se convirtió en un símbolo de la nueva era de la Revolución Industrial
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
Control clásico
El diseño de sistemas de control durante la Revolución Industrial estaba basado en prueba y error unido con una gran dosis de intuición ingenieril. Por lo tanto era más un arte que una ciencia.
A mediados de la década de 1800 los matemáticos fueron los primeros en analizar la estabilidad de los sistemas de control realimentados. Desde entonces las matemáticas son el lenguaje formal de la teoría de control. Podemos llamar a este periodo la prehistoria de la teoría de control.
Este trabajo en el análisis matemático de sistemas de control se realizó usando ecuaciones diferenciales.
Control clásico(1840) El Astrónomo Británico G.B. Airy, desarrollóun dispositivo de realimentación para posicionar un telescopio. Su dispositivo se basaba en un sistema de control de velocidad que giraba el telescopio de forma automática para compensar la rotación de la tierra con objeto de estudiar una determinada estrella durante un largo periodo de tiempo.Airy descubrió que un mal diseño del bucle de control por realimentación puede introducir grandes oscilaciones en el sistema
Fue el primero en estudiar la inestabilidad de los sistemas en bucle cerrado y el primero en usar para ello ecuaciones diferenciales.
Clave: ESTABILIDAD
Control clásico
(1868) J.C.Maxwell formuló un teoría matemáticarelacionada con la teoría de control usando ecuaciones diferenciales para modelar el regulador a bolas de Watt.Estudió el efecto de los parámetros del sistema en la estabilidad y mostró que el sistema es estable si las raíces de la ecuación característica tiene parte real negativa.
El nacimiento de la Teoría de Control matemática
Routh (1884); Hurwitz (1895), Criterio de estabilidad algebraico. Técnica numérica para determinar cuando una ecuación característica tiene raíces estables.
Control clásico
1920s y 1930s . En los Laboratorios de Bell Telephoneel enfoque del dominio frecuencial - P.S. de Laplace(1749-1827), J. Fourier (1768-1830), A.L. Cauchy (1789-1857) , y otros- se investigó y usó en telecomunicaciones
Problema: Enviar señales de voz a grandes distancias requiere una amplificación periódica.
Desafortunadamente se amplifica el ruido además de la señal de información.
.
(1934) H.S. Black demostró la utilidad del uso de realimentación negativa en el diseño de amplificadores.
Control clásico
En esta época los fundamentos de la teoría del control automático ya estaban bien asentados.
(1932 ) H. Nyquist. Formuló el criterio de estabilidad de Nyquist basado en la representación polar de una función compleja.
(1938) H.W. Bode. Usó la representación de la magnitud y la fase de la respuesta frecuencial de una función compleja. Investigó la estabilidad de los sistemas en bucle cerrado usando los conceptos de margen de fase y margen de ganancia.
Modelo matemático (Función de transferencia)
Análisis de estabilidad
Diseño de controladores (sistemas SISO)
Control clásico
Durante la guerra el control por realimentación se convirtióen una cuestión de supervivencia
El control y la 2ª Guerra Mundial
Control Naval
Sistemas de control de
armas
RADAR
Aviones de guerra
Control clásico
El sistema de guía de la V-1 usaba un autopiloto simple para regular la altura y velocidad.Un sistema de péndulo con peso daban una medida de la posición horizontal para controlar el ángulo de inclinaciónUn compas Gyromagnético inicializado en el hangar antes de despegar daba una realimentación para controlar el cabeceo y alabeoLa distancia al blanco se estimaba de forma aproximada y la determinación de cuando se había alcanzado se hacía mediante un cronómetro.
Ejemplo: La V-1 “Bomba volante“ (Buzz-Bomb)
Control clásicoDespués del empuje que la 2ª Guerra Mundial dio al control, el conocimiento se “recicló” para aplicaciones civiles.
(1947) Teoría de Servomecanismos[James, Nichols, and Phillips].
(1948) W.R. Evans presentó la técnica del lugar de las raíces
(1949) N. Wiener analizó sistema de procesamiento de información usando modelos estocásticos. Análisis Estocástico.
Otros desarrollos
Industria Aplicaciones domesticas
Aviación civil
Sensor
Actuador
Controlador
Referencia
Control clásico
Limitaciones del control clásico
El dominio frecuencial es apropiado para sistemas lineales invariantes en el tiempo y una entrada/una salida (SISO).
Limitaciones para tratar no linealidades.
Se necesitan descripciones mas apropiadas para problemas complejos de control multivariable.
Índice
Objetivos de la Ingeniería de controlLa realimentación: un paradigma universalPerspectiva histórica
Control empíricoControl clásicoControl moderno
Control Moderno
(1957) USSR lanza su primer satélite orbital
También en la Unión Soviética se obtienen avances significativos en control no lineal
(1893 -> 1960) Lyapunov – caracterización de la estabilidad de sistemas no lineales
(1948), Ivachenko – principios del control por relé
(1960), Popov – Criterios de estabilidad para sistemas híbridos lineales-no lineales (criterio del círculo)
Las ecuaciones diferenciales se vuelven a usar como herramientas matemáticas
Control Moderno
60’s – Diferentes aproximaciones a la teoría de control
Control óptimo (Bellman, Pontryagin)
Teoría de observadores(Kalman, Bleltram)
Se introduce la descripción matricial
(Espacio de estados)
Se usa un filtro de Kalman para obtener datos de navegación en el
primer aterrizaje en la luna.
Control Moderno
60’s – Extensiones al control no lineal
Zames, Narendra, Desoer
Aplicación de estos resultados al estudio de la distorsión no lineal en lazos de control con restricciones, control de procesos no lineales, robótica…
La llegada de la era de la informática
Finales 60’s – 70’s Primer microprocesador
(1969) W. Hoff
Control Moderno
Teoría de los sistemas muestreados adaptados a los nuevos
J.R. Ragazzini, G. Franklin, and L.A. Zadeh
70’s – hasta ahora
La Teoría del control sigue creciendo. Aparecen nuevos problemas y retos:
Control Robusto
Control Adaptativo
Control distribuido, a través de redes, etc.
Control Moderno
En la actualidad la Tecnología de Control es fundamental
¿Que tienen estos sistemas en común?
Tornado Boeing 777
• Muy no lineales, dinámica muy compleja.• Los dos son capaces de transportar cosas y personas a grandes distancias
PERO• Uno está controlado y el otro no• El control es “la tecnología oculta que te encuentras todos los días”• Se mantiene la noción de “realimentación”