Índice - cemsa
TRANSCRIPT
1
2
ÍNDICE
BLOQUE 1 EL CONOCIMIENTO CIENTIFICO Y LAS MAGNITUDES FÍSICAS ..... 3
1.1 Generalidades: contexto de la física ...................................................................... 3
1.2 ¿Porqué son importantes los métodos de investigación? ................................ 11
1.3 Importancia de la medición .................................................................................... 13
1.4 Vectores .................................................................................................................... 22
BLOQUE 2 TIPOS DE MOVIMIENTO ........................................................................... 30
2.1 Conceptos relacionados con el movimiento ....................................................... 30
2.2 Movimiento en una dimensión .............................................................................. 34
2.3 Movimiento en dos dimensiones .......................................................................... 38
BLOQUE 3 LEYES DEL MOVIMIENTO DE NEWTON ............................................... 45
3.1 Generalidades sobre la dinámica ......................................................................... 45
3.2 Fuerza y peso .......................................................................................................... 47
3.3 Fuerzas de fricción estática y dinámica ............................................................... 52
3.4 Leyes de Newton ..................................................................................................... 56
3.5 Aplicaciones de las leyes de Newton en un plano horizontal ¡Error! Marcador
no definido.
3.6 Aplicaciones de las leyes de Newton en un plano inclinado . ¡Error! Marcador
no definido.
3.7 Ley de la Gravitación Universal de Newton ........................................................ 65
3.8 Leyes de Kepler ....................................................................................................... 66
BLOQUE 4 RELACION TRABAJO-ENERGIA .............................................................. 67
4.1 Trabajo mecánico .................................................................................................... 67
4.2 Energía mecánica ................................................................................................... 70
4.3 Potencia mecánica .................................................................................................. 74
3
BLOQUE 1 EL CONOCIMIENTO CIENTIFICO Y LAS MAGNITUDES FÍSICAS Unidad de competencia Utiliza los métodos de observación y experimentación necesarios, así como las magnitudes fundamentales, derivadas, escalares y vectoriales que permiten comprender conceptos, teorías y leyes de la física para explicar los fenómenos físicos que ocurren a nuestro alrededor.
1.1 Generalidades: contexto de la física Las ciencias naturales son las encargadas de explicarnos y hacernos comprender las cosas y fenómenos que suceden en nuestra vida cotidiana, en el mundo y en el inmenso universo. Éstas se han subdividido en dos grandes ramas:
Ciencias biológicas: Son las encargadas del estudio de los seres vivos; comprenden áreas como la biología, la botánica y la zoología, entre otras.
Ciencias físicas: Son las encargadas del estudio de los objetos inertes; comprenden áreas como la química, la astronomía, la geología y a la misma física, entre otras.
Sin lugar a dudas, la física es, de las ciencias físicas, la más importante porque trata precisamente los principios básicos del universo. Es mediante sus conceptos, teorías, principios y leyes transformadas en ecuaciones que podemos comprender y expandir la visión de las cosas del mundo que nos rodea. Antecedentes históricos de la física: los primeros físicos y los contemporáneos El ser humano siempre ha tratado de informarse y explicarse acerca de los fenómenos del mundo que le rodean y que en determinado momento han sido nuevos. Por ejemplo, a los cavernícolas, el fuego, que era provocado por las descargas eléctricas de los rayos sobre los árboles y otros objetos, en un principio les causaba temor; pero posteriormente, reveladas las causas que lo generaban, lo relacionaron con el calor, la luz e incluso con el sonido. Así, perdido el temor, aprendieron a utilizarlo como un satisfactor de sus necesidades y a producirlo en forma controlada.
Ciencias Naturales
4
Para satisfacer otras necesidades el hombre inventó la rueda, construyó canales de riego, chozas y embarcaciones guiadas por el viento en ríos importantes como el Nilo y el Éufrates; esto hace más de 7000 años (5000 a. C.). Hace aproximadamente 5500 años, los egipcios desarrollaron la escritura con jeroglíficos, así como un sistema numérico decimal. Los fenómenos naturales, como el eclipse de Sol, atemorizaban y producían pánico en la gente, lo que dio inicio a la creación de diferentes dioses para representarlos.
Los astros fueron adorados y estudiados por sacerdotes de la antigua Babilonia, quienes cubrieron que la Luna realizaba un movimiento periódico de casi treinta días y que el Sol daba alrededor de doce veces más (360 días) en regresar al punto de referencia. También en la antigua Babilonia tuvo su origen el sistema sexagesimal (base 60), que es utilizado para la medición del tiempo y de los ángulos. Transcurrió mucho tiempo para que el filósofo griego Tales de Mileto (624-574 a. C.) llamado así porque vivió en la ciudad de Mileto, actualmente Turquía—, al frente de la escuela Jónica, realizara estudios sobre lo material de la naturaleza, es decir, lo físico de la materia, en los que afirmaba que el agua es la esencia de toda la materia. Tales fue uno de los siete sabios de Grecia, y el primer filósofo que intentó dar una explicación física del universo,
concluyendo con Platón (428-347 a. C.) —a quien llamaban así por el significado griego de este término: «el de anchas espaldas» su nombre verdadero fue Aristocles y era de una familia aristocrática de Atenas—, quien afirmaba que el universo se formaba por cuatro elementos básicos: la tierra, el agua, el fuego y el aire. En la Edad Media dominó el pensamiento erróneo de Aristóteles (384-322 a. C.), quien sostenía que la materia era continua y compacta porque la naturaleza no acepta ningún vacío. Por otro lado, la teoría de Demócrito (460-370 a. C.) consideraba que toda la materia está compuesta por diminutas partículas indivisibles sobre las que era imposible concebir una estructura menor; es el principal representante del atomismo antiguo. Por su parte. Arquímedes (287-212 a. aporta mediante sus estudios los principios sobre la flotación de los cuerpos y la palanca. Arquímedes fue, sin duda, el mayor matemático y físico de la Antigüedad su historia está llena de anécdotas su frase célebre es: «Dame un punto de apoyo y moveré la Tierra”. Un siglo después Tito Lucrecio Caro (siglo 1 a. C.) plantea que los átomos tienen movimiento.
5
Aunque Aristóteles introdujo el vocablo física, fue el inglés Roger Bacon (1220-1292) quien lo interpretó como ciencia experimental, cuyo lenguaje eran las matemáticas, y analizó las causas del error. El desarrollo del modelo universal con el Sol como centro, teoría heliocéntrica, correspondió a Copérnico (1473-1543), cuya obra fue el cimiento sobre el que Galileo, Kepler, Newton, Einstein y otros construyeron la astronomía moderna. Fueron los estudios y trabajos del físico y astrónomo italiano Galileo Galilei (1564-1642) sobre el péndulo, experimentación basada en el método científico y los movimientos uniforme y uniformemente acelerado, los que hicieron que la física fuera aceptada propiamente como una ciencia. En esta misma época se tienen aportaciones del alemán Johannes Kepler (1571- 1630) sobre las leyes del movimiento de los planetas y del holandés Christian Huygens (1629-1695) sobre la fuerza centrífuga y la teoría ondulatoria de la luz. Han pasado más de tres siglos desde que murió Kepler y sus aportaciones aún tienen fulgor. No hay mejor manera de bajar el telón sobre la historia de Kepler que la de citar el epitafio que compuso para su lápida: «Medí los cielos, y ahora las sombras mido, en el cielo brilló el espíritu en la tierra descansa el cuerpo».
De gran importancia fueron los trabajos realizados por el físico inglés Isaac Newton (1642-1727), cuyo resultado fue el descubrimiento de las leyes del movimiento y de la gravitación universal; así, la física teórica adquirió una base sólida. Más tarde, el físico británico James Prescott Joule (1818-1889) aporta la ley de la conservación de la energía y el efecto de transformación de calor, el cual lleva su nombre. Posteriormente, el físico alemán Max Planck (1858-1947) realizó trabajos sobre la cuantificación de la energía; Ernest Rutherford (1871-1937), sobre el núcleo atómico; el alemán Albert Einstein (1879-1955), sobre la relatividad, y el físico nacido en Copenhague,
Dinamarca, Niels Bohr (1885-1962), sobre el modelo atómica y la cuantificación de la energía en los átomos. Albert Einstein es considerado como el físico más
destacado del siglo XX y uno de los más importantes científicos de todos los tiempos. Es importante mencionar que el mayor avance de conocimientos comprobados con los hechos se ha dado en los últimos cinco siglos, especialmente en el siglo XX, conformando así a la ciencia física, cuya
6
aplicación ha llevado a innumerables inventos como la luz eléctrica, la televisión, el automóvil, las computadoras, los aviones, los trenes eléctricos, las naves espaciales, entre otros [Ilustración 1.3].
Importancia del estudio de la física: ¿cuál es la utilidad de la física en la vida moderna? Los cursos de física en el bachillerato te darán los conocimientos para que puedas explicarte la mayoría de los fenómenos que percibes en tu vida cotidiana, lo que te permitirá comprender y disfrutar en forma plena el universo que te rodea. Es mediante el estudio de la física que nos explicaremos los diferentes tipos de movimiento de los objetos como vehículos de transporte, proyectiles, naves espaciales, satélites y planetas. Así sabremos reconocer los diferentes tipos de energía que nos rodean y las transformaciones que sufre cada una de ellas, como la térmica, proveniente del poder calorífico del Sol y de los combustibles; la hidráulica, de los ríos y mares; la eólica, de los vientos; la cinética y mecánica, del movimiento; la nuclear, de las partículas que conforman el interior de los átomos de toda materia, entre otros. De esta manera comprenderemos los fenómenos físicos y apreciaremos la procedencia de todos los satisfactores tecnológicos actuales: los elementales como la luz, el sonido, el agua potable, los aparatos electrodomésticos, el transporte, etc., hasta los más modernos y actuales como la telefonía celular, la Internet, las telecomunicaciones, los automóviles modernos, la generación de energía por medios alternos, y con ello el cuidado del medio ambiente. A través de las tecnologías generadas por los conceptos básicos de la física, se pueden estudiar alternativas que permitan preservar los recursos no renovables y cuidar nuestro planeta. Con mayor razón te será útil si decides estudiar alguna carrera relacionada con el área técnica, ya que casi la totalidad de los cursos de esta área están basados en la aplicación de los conocimientos de la ciencia física. Por las razones mencionadas sobre el porqué del estudio de la física, debes tomar los cursos con actitud positiva, con la seriedad que se merece y dedicarles el tiempo y la energía suficientes. Concepto de física: su relación con otras ciencias Apoyados en que ciencia es un conjunto de conceptos y conocimientos verificados a lo largo del tiempo con los hechos, y que como se mencionó, la física estudia experimentalmente a todos los fenómenos naturales, podemos definirla como sigue: La física: es la ciencia que estudia las propiedades de la materia, la energía, el espacio y sus interrelaciones, apoyándose en la experimentación de los
7
fenómenos naturales. Ahora bien, los conceptos de materia y energía se definirán de manera elemental con la Finalidad de que sean claros para ti; conforme avances con otros cursos de física los podrás enriquecer. La materia: es todo lo que ocupa un lugar en el espacio y que tiene ciertas características, a las cuales llamamos propiedades de la materia, mismas que se clasifican en generales, específicas y particulares.
Son aquellas que tienen todos los cuerpos u objetos; por ejemplo: la masa (cantidad de materia), el peso (fuerza de atracción de la gravedad que ejerce la Tierra sobre la masa), el volumen (lugar que ocupa la masa en el espacio), la divisibilidad (partición que puede tener la masa), la impenetrabilidad (ocupar un solo espacio al mismo tiempo), la inercia (resistencia a moverse cuando está en reposo o a detenerse cuando está en movimiento) y la elasticidad (alargarse o contraerse en sus dimensiones), entre otras. Son aquellas por las cuales se diferencian los cuerpos u objetos unos de otros; ejemplo, el color, el olor, el sabor, el punto de ebullición y de fusión, la densidad (cantidad de masa por unidad de volumen) y el peso específico (relación entre el peso y su volumen), entre otras. Son aquellas que sólo se presentan en ciertos cuerpos u objetos como: tenacidad (resistencia a la ruptura), la maleabilidad (formación de láminas delgadas) y la ductilidad (formación de hilos o alambres), entre otras, que pertenecen al estado sólido; o como la viscosidad y capilaridad, que pertenecen al estado líquido.
De manera cotidiana pensamos en la energía en función del combustible para la industria, transporte, electricidad para calefacción, iluminación y aparatos electrodomésticos y los alimentos que consumimos. Estas ideas no definen realmente a la energía, sino a los combustibles utilizados para obtener los satisfactores humanos. La energía: es la capacidad para realizar un trabajo, y son las diferentes formas en que se manifiesta la materia. En virtud de la amplitud de la física, se puede afirmar que ella provee la mayoría de las bases científicas de ciencias como la química, la astronomía, la geología y
Propiedades
generales
Propiedades
específicas
Propiedades
particulares
Propiedades de la materia
8
en general, de codo con lo que nos encontramos en nuestra vida cotidiana. Por ejemplo, la astronomía se basa en la física para estudiar los patrones regulares que tienen los planetas, astros, etc., en cuanto a sus posiciones, velocidades, fuerzas; en general, la materia y la energía de cada uno de ellos. Por otro lado, la química se basa en la física para estudiar los fenómenos resultantes de la acción recíproca de las sustancias, que dan lugar a profundas transformaciones en su naturaleza. Éstas implican nuevas propiedades de la materia y de la energía, pero todo esto a partir de las propiedades naturales de los cuerpos, cuya información es proporcionada por la física. Por último, la geología, también llamada ciencia de la Tierra, fundamenta su estudio en los fenómenos físicos que en cuanto a espacio, materia y energía de nuestro planeta son dados por la física. Lo maravilloso de esta ciencia es que mediante teorías simples, algunos conceptos y, suposiciones fundamentales pueden alterar y expandir nuestra concepción del mundo que nos rodea. ¿Cómo dividir a la física para su estudio? El objeto de estudio de la física es la materia y la energía; por lo tanto, estudia y define los fenómenos físicos de la naturaleza, entendiéndose como fenómenos físicos los eventos y sus cambios, los hechos y sus consecuencias, así como todo aquello que perciben nuestros sentidos. Como ejemplos tenemos: el movimiento, las fuerzas, la materia, la energía, el calor, la luz, el sonido, el electromagnetismo, el comportamiento y la composición de los átomos, entre otros. Para el estudio de éstos, la física se ha dividido en clásica y moderna: en este curso sólo serán tratados temas de la primera. Por lo anterior, la física, para su estudio, agrupa los fenómenos en las siguientes ramas:
Mecánica clásica: Estudia el movimiento de objetos que se mueven a velocidades pequeñas muy por debajo de la velocidad de la luz.
Termodinámica: Estudia la temperatura, el trabajo y el calor de las partículas.
Electromagnetismo: Estudia la electricidad, el magnetismo y los campos electromagnéticos.
Óptica: Estudia todos los fenómenos relacionados con la luz.
Acústica: Estudia todos los fenómenos relacionados con el sonido.
Física Clásica
9
Atómica: Estudia las propiedades de los átomos, su estructura, sus transformaciones y sus interacciones con la radiación y con el medio que los rodea.
Molecular: Estudia aquellos fenómenos relacionados con la estructura molecular de los compuestos. Se ocupa, por ejemplo, de la explicación y la comprensión de los diferentes tipos de enlaces mediante los cuales los átomos forman moléculas.
Nuclear: Estudia todos los fenómenos relacionados con el núcleo atómico y las partículas subatómicas. Por ejemplo, las diferentes reacciones nucleares como la fisión y la fusión.
Relatividad: Estudia los objetos que se mueven a velocidades que se aproximan a la velocidad de la luz, incluyendo a la propia luz.
Mecánica Estudia las partículas en los niveles Cuántica: submicroscópico y macroscópico.
El lenguaje técnico: conceptos básicos Las ciencias físicas desarrollaron sus mayores progresos con las matemáticas al descubrir que con estas era posible analizar, describir y cuantificar la naturaleza sin ambigüedades. Con las matemáticas como herramienta es más fácil comprobar o rechazar los descubrimientos sobre la naturaleza desarrollados experimentalmente, ya que proporcionan el soporte en la validación de los resultados. Para el estudio de la física, las matemáticas básicas juegan un papel muy importante, ya que por medio de ellas relacionamos las diferentes variables que intervienen en el análisis de un fenómeno físico para obtener un resultado que nos permita validarlo en forma repetitiva para otras variables en condiciones semejantes. Por ejemplo, vamos a suponer que deseamos calcular la distancia que recorre un objeto que viaja con velocidad uniforme durante un tiempo determinado. Como se mencionó, para relacionar estas variables se requiere principalmente de las
Física Moderna
10
matemáticas; pero antes, se requiere de experimentos y mediciones repetitivas de las variables. Conjugando experimentos, mediciones y matemáticas se obtuvo para todo movimiento uniforme la siguiente ecuación: Donde: d = desplazamiento en metros
v = velocidad uniforme en metros sobre segundo t = tiempo transcurrido en segundos
Esta ecuación estableció inicialmente una hipótesis para el movimiento de los objetos que se mueven uniformemente. Después de validarla en forma experimental y repetitiva con otras velocidades uniformes y otros tiempos se convirtió en teoría científica. Entonces, una teoría científica es una hipótesis o conjunto de ellas que han sido comprobadas a través del tiempo con los hechos. Podemos concluir que la física utiliza a las matemáticas como herramienta para poder relacionar las variables experimentales que describan con exactitud los fenómenos físicos. Dado que el lenguaje técnico de la física es el de las matemáticas, se debe desarrollar habilidad para interpretar y entender sus significados. Por ejemplo, para calcular la velocidad uniforme (v) o el tiempo (t) en la Ecuación 1.1 resulta muy fácil despejar la incógnita deseada; pero habrá relaciones o ecuaciones que requieran de un conocimiento más profundo de las técnicas matemáticas. Por citar sólo algunos ejemplos de éstas: despejes más complicados de incógnitas, aplicación de funciones trigonométricas, solución a un sistema de dos ecuaciones con dos incógnitas; y en general, lo estudiado en cursos de aritmética, álgebra y trigonometría. Las cantidades se pueden sumar, restar, multiplicar y dividir. Existen ciertas reglas para las operaciones matemáticas con números y sus unidades, que serán descritas a continuación. Suma. Para poder sumar cantidades, todas ellas deben tener las mismas unidades. Por ejemplo: (6 m) + (2 m) + (12 m) = 20 m Resta. Para poder restar una cantidad de otra, también deben tener las mismas unidades. Por ejemplo: (10.5 kg) - (3.2 kg) = 7.3 kg
11
Multiplicación. Para multiplicar cantidades no es necesario que tengan las mismas unidades (aunque pueden tenerlas). Se multiplican las unidades tal y como los números se multiplican. Por ejemplo: (5 N) x (4 m) = 20 N . m Si las unidades multiplicadas son iguales, su producto es la unidad al cuadrado o al cubo. Como ejemplos: (4 m) x (2.5 m) = l0 m2 y (4 m) x (2.5 m) x (3.5 m) = 35 m3 División. Para dividir cantidades, tampoco es necesario que tengan las mismas unidades (aunque pueden tenerlas). Se dividen las unidades tal y como los números se dividen. Por ejemplo: (80 km) ÷ (4 h) = 20 km/h
Si las unidades a dividir son iguales se cancelan y ya no aparecen en el resultado. Por ejemplo: Cuando se tienen varias de estas operaciones matemáticas a la vez, se deben hacer acompañar todas las cantidades con sus respectivas unidades y aplicar las reglas antes mencionadas.
1.2 ¿Porqué son importantes los métodos de investigación? El método científico Hasta hace poco tiempo, para obtener conclusiones y nuevas leyes en la investigación científica, se desarrollaba una serie de pasos, los cuales conformaban el método científico; son entre otros, los siguientes:
- Observación - Formulación de hipótesis - Experimentación - Comprobación de hipótesis (o modificaciones en su caso) - Obtención de una ley o principio
Hoy en día son tantas las ramas de la ciencia y de procedimientos seguidos para generar nuevos conocimientos que difícilmente puede hablarse de un método científico como único e infalible. De hecho, hay muchos métodos científicos, y lo que cuenta es la imaginación y la habilidad para crear ideas que expliquen los fenómenos naturales y que por supuesto estén de acuerdo con los resultados
12
experimentales y observacionales. De la hipótesis a las leyes físicas Para la ciencia, un hecho es un acuerdo que toman estudiosos basados en una serie de observaciones sobre un mismo fenómeno. Una hipótesis científica es una conjetura (supuesto) bien fundamentada, que sólo se considera un hecho hasta que se demuestre en forma repetitiva el experimento. Una vez que ha sido probada sin contradicción alguna, se obtiene una ley o principio. Un científico crea cierta hipótesis, ley o principio como verdadero; pero si encuentra evidencia de lo contrario, entonces, de acuerdo con el buen espíritu científico, debe modificar o desechar dicha hipótesis, pues todo científico debe reconocer cuando su trabajo ha sido superado, aceptando los resultados y otras evidencias experimentales, aun cuando le agradara que fueran diferentes. Debe esforzarse por distinguir entre lo que ve y lo que desearía ver para no engañarse a sí mismo. La experimentación debe tener codo el rigor científico como soporte, de acuerdo con el método científico utilizado. ¿Cómo aplicar el método científico experimental? Se considera como fundadores del método científico experimental al físico italiano Galileo Galilei (1564-1642) y al filósofo inglés Francis Bacon (1561-1626). Es un método muy efectivo para adquirir, organizar y aplicar nuevos conocimientos mediante las siguientes fases:
1. Proposición de un problema muy concreto, extraído de la observación cuidadosa de los fenómenos conexos a él.
2. Formulación de una hipótesis razonable capaz de explicar el problema.
3. Predecir las consecuencias de esta hipótesis.
4. Proposición y realización de un experimento con la finalidad de verificar la
hipótesis.
5. Formular la regla o ley más simple que organice: hipótesis, predicción y resultado experimental.
En caso de que la hipótesis no se verifique mediante la experimentación, se debe modificar o desechar por falsa. Aun cuando se mencionó que el método es muy efectivo, debemos reconocer que no siempre ha sido la clave de los descubrimientos y adelantos de la ciencia.
13
Gran parte del progreso de la ciencia se ha debido a resultados por ensayo y error, por experimentos realizados sin hipótesis previa o por accidente. Al igual que ocurre con el método científico, no puede decirse que existen recetas para la realización de experimentos; hay muchos métodos experimentales, ya que los retos que nos plantean son siempre distintos. Podemos concluir que, por encima de cualquier método particular, el éxito del progreso de la ciencia estriba en las actitudes de curiosidad, experimentación y humildad ante los hechos de los científicos.
1.3 Importancia de la medición Podemos decir, en términos generales, que una cantidad (también llamada magnitud) se define como una propiedad observable a la que se le puede asociar con un número: éste es obtenido mediante una operación a la que llamaremos medición y puede ser asignado de manera directa por la medida tomada, o indirecta al realizar ciertas operaciones numéricas indicadas por algunas reglas a las que llamaremos formulas. Hasta en nuestra vida cotidiana necesitamos realizar mediciones de tiempos, distancias o tamaños, pesos, temperaturas y velocidades, dentro de las más comunes; con mayor razón las personas que desarrollan labores científicas y técnicas requieren mediciones de magnitudes que deben ser determinadas con precisión, como diámetros, áreas, volúmenes, fuerzas, presiones, corrientes eléctricas, voltajes y otras más. Podemos decir que el proceso de medición es una necesidad para poder definir y cuantificar las magnitudes, y cada vez se intenta conseguir una mayor precisión para medirlas. División de las magnitudes: fundamentales y derivadas Las leyes físicas se expresan en magnitudes físicas; sin embargo, debemos diferenciar dos tipos: Magnitudes fundamentales: integradas por siete magnitudes físicas: longitud, tiempo, masa, corriente eléctrica, temperatura termodinámica, cantidad de sustancia e intensidad luminosa, las cuales no se definen en términos de otras cantidades. Magnitudes derivadas: integradas por magnitudes físicas como la velocidad, la densidad, la aceleración, entre otras, que se definen en función de las fundamentales. Métodos directos e indirectos de medida Es de nuestro conocimiento que cuando se realizan mediciones en los experimentos uno no puede confiarse demasiado en los sentidos del tacto, vista, oído, etc., para hacer observaciones precisas. A los métodos de medición que se
14
confían a los sentidos se les llama métodos subjetivos. A los que utilizan instrumentos científicos se les denomina métodos objetivos. En los inicios de la ciencia, las leyes fueron descubiertas, frecuentemente, mediante el uso de métodos subjetivos. El progreso fue lento, hasta que tales métodos fueron reemplazados por los objetivos, usando instrumentos de medida inventados para dar mayor precisión. Los experimentos anteriores nos ilustran las falsas impresiones que tan fácilmente podemos tener por el uso de los métodos subjetivos, demostrándose la necesidad de utilizar mejor los métodos objetivos. Métodos de medición Existen dos métodos de medición: el directo y el indirecto El método directo se efectúa utilizando aparatos o instrumentos de medición en forma directa; por ejemplo, una cinta métrica para medir longitudes, una báscula para medir masas, un cronómetro para medir tiempos, un termómetro para medir temperaturas, etc. La elección de un instrumento de medición se determina por la precisión requerida y por las condiciones físicas que rodean a la medición. El valor de ésta depende de varios factores, como la calidad del instrumento, la habilidad del observador y el número de mediciones efectuadas. Por otra parte, el método indirecto se efectúa utilizando fórmulas en las cuales sus letras se reemplazan por los datos que conocemos para obtener el valor que deseamos medir; por ejemplo, un área, un volumen, una velocidad, etcétera. Unidad de medida La unidad de medida de una cierta magnitud puede ser definida como una magnitud de las mismas características que sirve de base para darle un valor a otra medida con características semejante. Podemos decir, entonces, que medir una magnitud física seria compararla con otra de su misma clase, a ala cual se le llama unidad. Para definir a esa unidad de medida se utilizan objetos o procesos que son fijos, es decir, que no cambian con el tiempo, y se les da el nombre de unidades patrón; son fijadas por convenios internacionales. Toda unidad patrón ha de poseer una condición fundamental: ser invariable. A pesar de ello, estas unidades de medida no han sido siempre las mismas, sino que ha ido evolucionando gracias a los avances técnicos y científicos.
15
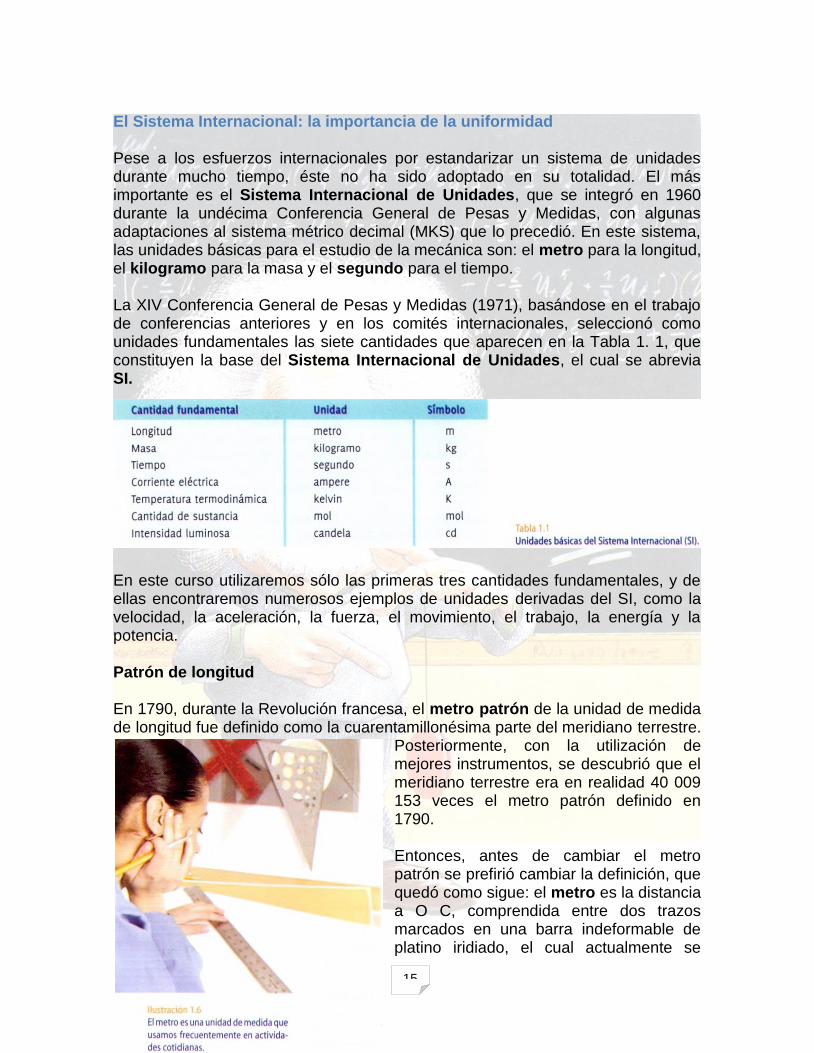
El Sistema Internacional: la importancia de la uniformidad Pese a los esfuerzos internacionales por estandarizar un sistema de unidades durante mucho tiempo, éste no ha sido adoptado en su totalidad. El más importante es el Sistema Internacional de Unidades, que se integró en 1960 durante la undécima Conferencia General de Pesas y Medidas, con algunas adaptaciones al sistema métrico decimal (MKS) que lo precedió. En este sistema, las unidades básicas para el estudio de la mecánica son: el metro para la longitud, el kilogramo para la masa y el segundo para el tiempo. La XIV Conferencia General de Pesas y Medidas (1971), basándose en el trabajo de conferencias anteriores y en los comités internacionales, seleccionó como unidades fundamentales las siete cantidades que aparecen en la Tabla 1. 1, que constituyen la base del Sistema Internacional de Unidades, el cual se abrevia SI.
En este curso utilizaremos sólo las primeras tres cantidades fundamentales, y de ellas encontraremos numerosos ejemplos de unidades derivadas del SI, como la velocidad, la aceleración, la fuerza, el movimiento, el trabajo, la energía y la potencia. Patrón de longitud En 1790, durante la Revolución francesa, el metro patrón de la unidad de medida de longitud fue definido como la cuarentamillonésima parte del meridiano terrestre.
Posteriormente, con la utilización de mejores instrumentos, se descubrió que el meridiano terrestre era en realidad 40 009 153 veces el metro patrón definido en 1790. Entonces, antes de cambiar el metro patrón se prefirió cambiar la definición, que quedó como sigue: el metro es la distancia a O C, comprendida entre dos trazos marcados en una barra indeformable de platino iridiado, el cual actualmente se
16
conserva en la Oficina Internacional de Pesas y Medidas, establecida en 1875 en Sévres, cerca de París, Francia. Mas tarde, en 1959, se estableció una nueva definición del metro patrón: 1 553 164.13 veces la longitud de onda en el vacío de la luz roja del cadmio, a la temperatura de 15°C y a la presión de 760 mm de mercurio. En 1960, se adoptó la definición atómica del metro patrón como una longitud igual a 1 650 763.73 longitudes de onda en el vacío, de la radiación correspondiente a la transición entre los niveles 2p10 y 5d5 del átomo de criptón 86. Durante la l7a Conferencia General de Pesas y Medidas en octubre de 1983 se determinó la definición más moderna del metro patrón como la distancia recorrida por la luz en el vacío durante un tiempo de 1/299 792 458 segundos. En efecto, esta última definición establece que la velocidad de la luz en el vacío es de 299 792 458 m/s. Por lo anterior, la unidad de longitud, el metro (m), se define como sigue: El metro (m) es la longitud de la trayectoria recorrida por la luz en el vacio durante un tiempo en 1/299 792 458 de segundo. Patrón de masa El kilogramo es la unidad fundamental de la masa del SI; se define como la masa de un cilindro de aleación de platino-iridio que se conserva en el Laboratorio Internacional de Pesas y Medidas en Sevres, Francia. Este patrón de masa se estableció en 1987, sin cambio a la fecha, en virtud de que el platino-irido es una aleación extremadamente estable. Un duplicado se conserva en el Instituto Nacional de Patrones y Tecnología en Gaithersburg, Maryland. La unidad de masa, el kilogramo (kg), se define como sigue: El kilogramo (kg) es igual a la masa del prototipo internacional del kilogramo. Patrón de tiempo El segundo es la unidad fundamental del tiempo del SI: inicialmente se definió en función del día solar medio para el año 1900. Sin embargo, tal definición se desechó porque la rotación de la Tierra varía sustancialmente con el tiempo. En 1967, durante la décimotercera Conferencia General de Pesas y Medidas, se redefinió aprovechando la ventaja de alta precisión que puede obtenerse con el reloj atómico, que al usar las frecuencias de ciertas transiciones atómicas del átomo de cesio 133 limita un posible error menor a un segundo cada 30000 años. Así, el segundo quedó definido como 9 192 631 770 periodos de la radiación del
17
átomo de cesio 133. La unidad del tiempo, el segundo(s), se define como sigue: El segundo (s) es la duración de 9 192 631 770 periodos de la radiación correspondiente a la transición entre los dos niveles hiperfinos del estado fundamental del atomo de cesio 133. La Conferencia General de Pesas y Medidas (CGPM) se reúne cada cuatro años en París. Francia, para discutir y examinar los acuerdos que aseguran el mejoramiento y la diseminación del Sistema Internacional de Unidades, tomar resoluciones y hacer recomendaciones, su primera reunión fue en 1889. Otros sistemas de medición Sistema cegesimal (cgs) Es un sistema de unidades submúltiplo, derivado del Sistema Métrico Decimal (MKS) que antecedió al Sistema Internacional de Unidades (SI). El Sistema cgs (por sus siglas) tiene como unidad de longitud al centímetro (cm), como unidad de masa al gramo (g), y al segundo (s) como unidad de tiempo. Su equivalencia con las unidades del SI viene dada por los prefijos en la notación científica. • Un centímetro es la centésima parte de un metro: 1 cm = 0.01 m; o también
puede decirse que en un metro hay cien centímetros: 1 m = 100 cm. • Un gramo es la milésima parte del kilogramo: l g = 0.001 kg; o también
puede decirse que en un kilogramo hay mil gramos: 1 kg = 1000 g. • En cuanto a la unidad de tiempo, que es el segundo, no hay diferencia. • La unidad derivada de la gravedad tiene un valor promedio de 980 cm/s2. Sistema Inglés El Sistema Inglés de unidades, también llamado Sistema Británico de Unidades, se usa en Inglaterra, parte de los Estados Unidos, Canadá y otros países cuyo lenguaje es el inglés. A diferencia del Sistema Internacional, no existe una autoridad única en el mundo que tome decisiones sobre los valores de las unidades en el Sistema Inglés. De hecho, algunas unidades tienen valores diferentes en diversos países. Tiene como unidades básicas para el estudio de la mecánica el pie para la longitud, la libra
18
para la fuerza y el segundo para el tiempo.
La yarda es una unidad también de este sistema que equivale a tres pies, y cada pie equivale a doce pulgadas. Sus conversiones a los sistemas de unidades, definidos en las secciones anteriores, están dadas por las siguientes relaciones:
1 pulgada = 2.54cm = 0.0254 m 1 pie = 30.48cm = 0.3048 m 1 yarda = 91.44cm = 0.9144m
La fuerza de una libra equivale a 4.48 newtons; o también puede decirse que 1 newton es igual a una fuerza de 0.2248 libras.
En cuanto a la unidad de tiempo, que es el segundo, no hay diferencia.
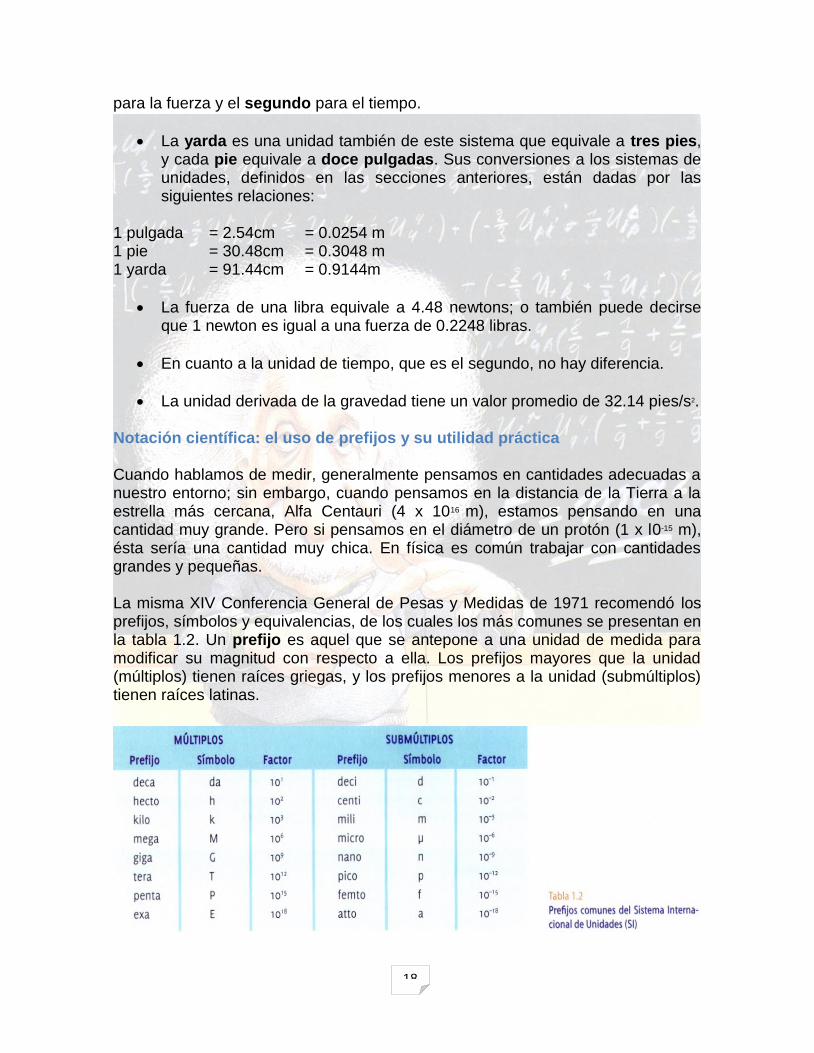
La unidad derivada de la gravedad tiene un valor promedio de 32.14 pies/s2. Notación científica: el uso de prefijos y su utilidad práctica Cuando hablamos de medir, generalmente pensamos en cantidades adecuadas a nuestro entorno; sin embargo, cuando pensamos en la distancia de la Tierra a la estrella más cercana, Alfa Centauri (4 x 1016 m), estamos pensando en una cantidad muy grande. Pero si pensamos en el diámetro de un protón (1 x l0-15 m), ésta sería una cantidad muy chica. En física es común trabajar con cantidades grandes y pequeñas. La misma XIV Conferencia General de Pesas y Medidas de 1971 recomendó los prefijos, símbolos y equivalencias, de los cuales los más comunes se presentan en la tabla 1.2. Un prefijo es aquel que se antepone a una unidad de medida para modificar su magnitud con respecto a ella. Los prefijos mayores que la unidad (múltiplos) tienen raíces griegas, y los prefijos menores a la unidad (submúltiplos) tienen raíces latinas.
19
Cuando el exponente de la base lo es positivo, indica un cierto número de ceros a la derecha de 1 (múltiplo de la unidad). Mientras que cuando el exponente es negativo, indica un cierto número de corrimientos o lugares del punto hacia la izquierda de 1 (submúltiplo de la unidad). Por ejemplo: 5 x 103 = 5 x 10 x 10 x l0 = 5 000 (se agregan 3 ceros a la derecha) 5x l0-3 = 5 ÷ 10 ÷ 10÷10 = 0.005 (se corre el punto 3 lugares a la izquierda)
Transformación de unidades: ¿cómo ir de un sistema a otro? Para el estudio de la física es muy importante que sepas interpretar las tablas de conversión de valores de magnitudes físicas y matemáticas. Éstas son de gran utilidad ya que han sido comprobadas y estandarizadas por su empleo internacional. Para los temas que serán vistos en este curso y en los posteriores, las tablas de interés que se anexan al final del libro en el Anexo A son:
Tabla de factores de conversión de unidades para magnitudes físicas de longitud, masa, tiempo, velocidad, fuerza, trabajo, energía, calor y presión. Con esta Tabla podrás pasar de una unidad proporcionada a otra de la misma especie, multiplicando por el factor de conversión resultante de la intersección horizontal (unidad proporcionada) y vertical (nueva unidad) (Tabla A.1).
Tabla de conversiones directas de unidades (equivalencias) para magnitudes físicas de longitud, área, volumen, masa, fuerza, velocidad, aceleración, presión, tiempo, energía, trabajo, potencia y ángulo. Con esta Tabla podrás pasar de una unidad dada a otra de la misma especie, multiplicando por la equivalencia correspondiente si la relación es directa, o dividiéndola entre ella si la relación es inversa (Tabla A.2).
Tabla de funciones trigonométricas. Con esta tabla podrás obtener las funciones trigonométricas: seno, coseno, tangente y cotangente de cualquier ángulo dado en grados o en radiantes; o viceversa, a partir de la función trigonométrica obtener el ángulo. Selecciona el ángulo en grados o radianes en la columna correspondiente e intercepta con la función que deseas calcular; el valor allí listado será el resultado. Para ángulos de 0 a 45 grados, la función trigonométrica se toma de la parte superior; mientras que para ángulos de 45 a 90 grados la función se toma de la parte inferior. Para el proceso inverso, dado el valor de la función, encuentra en la

20
columna de la función el valor que más se le acerque y se lee hacia la derecha o hacia la izquierda, según corresponda, el ángulo en grados o en radianes. La Tabla viene dada en ángulos enteros, por lo que para las fracciones se requiere interpolar. Todos estos problemas se minimizan si cuentas con una calculadora que tenga funciones trigonométricas y si tu profesor te permite usarla (Tabla A.3).
Hay algunas tablas que por ser para ciertos temas específicos se incluyen dentro del libro donde son tratados estos.
Algunos instrumentos de medición para diferentes magnitudes Un instrumento de medición es un aparato que nos permite cuantificar en forma correcta una cantidad de un fenómeno físico, sustituye a los sentidos humanos, que presentan imperfecciones ligadas a factores de orden personal. A continuación citaremos algunos instrumentos de medición cotidianos:
Para medir longitudes utilizamos cinta métrica, flexómetro o regla.
Para medir espesores empleamos el calibrador Palmer (tornillo micrométrico).
Para medir diámetros internos, externos y profundidades utilizamos el calibrador Vernier (pie de rey).
Para medir tiempo utilizamos el reloj con segundero o cronómetro.
Para medir el peso de objetos usamos la báscula.
Para medir otros tipos de fuerzas en general utilizamos balanza de resorte o dinamómetro.
Para medir temperaturas utilizamos el termómetro.
Para medir velocidades utilizamos el velocímetro.
Para medir distancias y determinar intervalos iguales de tiempo utilizamos el ticómetro.
Para medir ángulos utilizamos el transportador, etcétera. Errores en la medición Los errores de medición se dividen en dos clases: sistemáticos y circunstanciales.
21
Errores sistemáticos: se presentan de manera constante a través de un conjunto de lecturas realizadas al hacer la medición de una magnitud determinada. Las fuentes o causas de esta clase de errores son:
a) Empleo de instrumentos de medición defectuosos.
b) Error de paralaje, originado por una incorrecta postura del observador que le impide hacer una adecuada lectura de la medición.
c) Mala calibración del aparato o instrumento usado.
d) Error de escala, producido por el rango de precisión del instrumento
empleado. Errores circunstanciales: llamados estocásticos por ser difíciles de apreciar debido a que son muy pequeños y se producen en forma irregular de una medición a otra. También se les da el nombre de aleatorios porque son el resultado de factores inciertos y, por lo tanto, tienen la misma posibilidad de ser positivos y negativos. Al realizar medidas se cometen multitud de errores, tanto por falta de sensibilidad del instrumento como por deficiencias del observador. Por ello, el número que se obtiene como resultado de una medida nunca es el valor exacto de la cantidad que se pretende expresar, sino un valor aproximado. El grado de este error puede disminuirse efectuando varias veces la medida con diferentes observadores y obteniendo la media aritmética de todas ellas. Así, aunque nunca se pueda expresar el resultado exacto, se pueden obtener dos números de las medidas de los observadores entre los cuales se encuentre el verdadero valor de la medida. Tipos de error Se consideran tres tipos principales de error: error absoluto, error relativo y error porcentual. El error absoluto es la diferencia entre el valor obtenido y el valor dado como exacto. Representando el valor aproximado por M´ y el exacto por M, el error absoluto e, viene dado por: e = M´—M. Como la medida exacta por lo general no se conoce, entonces se realizan muchas mediciones y se toma la media aritmética como valor exacto. El error absoluto puede ser: por exceso, cuando la medida M´ es mayor que la exacta, siendo el error positivo, y por defecto, cuando el valor obtenido es menor que el exacto; en este caso el error es negativo.
22
El error absoluto no proporciona una idea clara de la aproximación de una medida. Por ejemplo, un error absoluto de 1 cm tiene muy distinto significado en cuanto a la calidad de la medición, según sea la distancia a medir: 1 m o 1 km. Error relativo. Con la finalidad de tener una idea más exacta del error de apreciación, se emplea el error relativo ε, definido como el cociente entre el error
absoluto y la medida exacta: ε = 𝒆
𝑴. Este error relativo no va acompañado por
ninguna unidad, ya que al ser un cociente entre dos cantidades de la misma especie las unidades quedan simplificadas. Error porcentual. El error relativo comúnmente se dice que es un valor por unidad y si se multiplica por 100, se dice que es un valor en porcentaje, conocido como error porcentual.
1.4 Vectores Como se menciono anteriormente, para describir los fenómenos naturales de nuestro universo necesitamos de las cantidades físicas, que pueden agruparse en cantidades escalares y cantidades vectoriales. Por ejemplo, cuando hablamos del movimiento de un cuerpo se pueden presentar dos términos, que son rapidez y velocidad. La rapidez sólo se refiere a la magnitud con la cual el cuerpo se mueve, sin especificar hacia dónde, por lo que se considera una magnitud escalar. Por otro lado, la velocidad implica, además de la magnitud, hacia dónde se está moviendo, es decir, su dirección y sentido, lo que hace necesario considerarla como magnitud vectorial. Magnitudes escalares y vectoriales Una cantidad escalar queda descrita completamente por su magnitud, es decir, por un número y una unidad de medida. Por ejemplo: longitud, masa, tiempo, temperatura densidad, área, volumen, energía, potencia, calor, etcétera. Las operaciones de suma y resta con cantidades escalares se realizan en la forma algebraica usual, con la única condición de que tengan las mismas unidades. Por ejemplo: 25 m + 15 m + 10 m = 50 m 120 m3, + 30 m3 + 10m3 = 100m3
Para operaciones de multiplicación y división con cantidades escalares, no se requiere que tengan las mismas unidades. Por ejemplo: 20 kw x 15 h = 300 kwh 45g ÷ 3 cm3 = 15g/cm3
Una cantidad vectorial requiere, para ser descrita completamente, de una
23
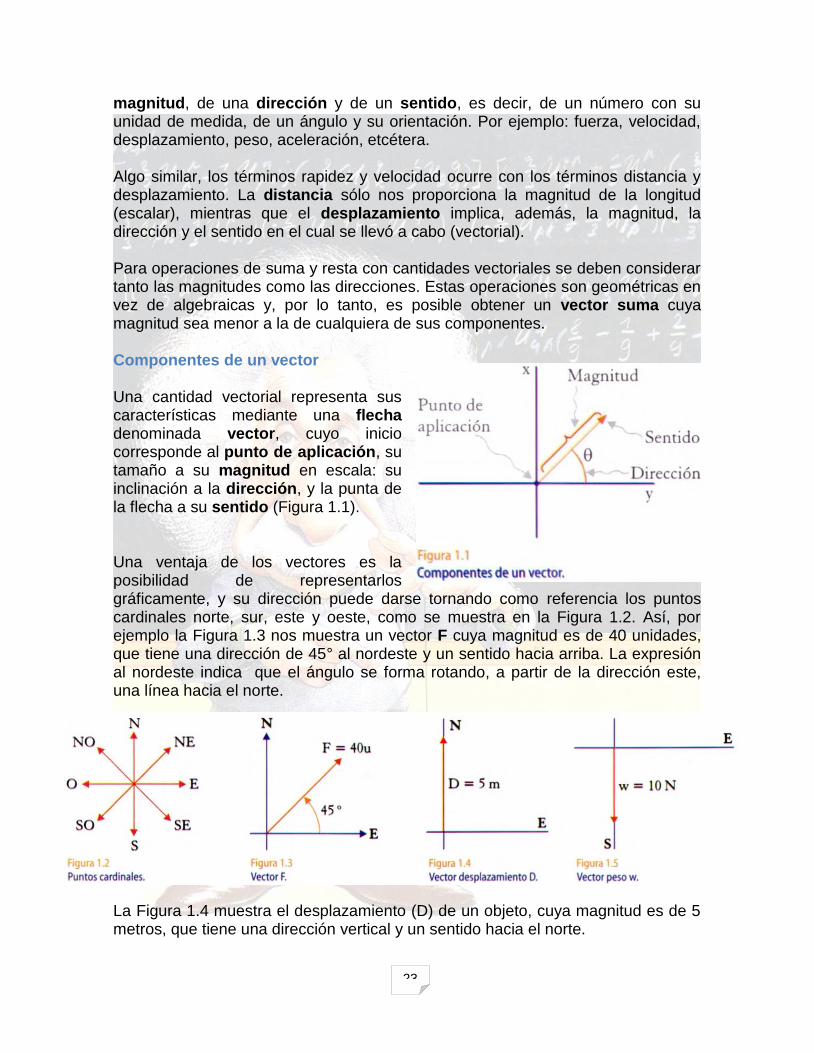
magnitud, de una dirección y de un sentido, es decir, de un número con su unidad de medida, de un ángulo y su orientación. Por ejemplo: fuerza, velocidad, desplazamiento, peso, aceleración, etcétera. Algo similar, los términos rapidez y velocidad ocurre con los términos distancia y desplazamiento. La distancia sólo nos proporciona la magnitud de la longitud (escalar), mientras que el desplazamiento implica, además, la magnitud, la dirección y el sentido en el cual se llevó a cabo (vectorial). Para operaciones de suma y resta con cantidades vectoriales se deben considerar tanto las magnitudes como las direcciones. Estas operaciones son geométricas en vez de algebraicas y, por lo tanto, es posible obtener un vector suma cuya magnitud sea menor a la de cualquiera de sus componentes. Componentes de un vector Una cantidad vectorial representa sus características mediante una flecha denominada vector, cuyo inicio corresponde al punto de aplicación, su tamaño a su magnitud en escala: su inclinación a la dirección, y la punta de la flecha a su sentido (Figura 1.1). Una ventaja de los vectores es la posibilidad de representarlos gráficamente, y su dirección puede darse tornando como referencia los puntos cardinales norte, sur, este y oeste, como se muestra en la Figura 1.2. Así, por ejemplo la Figura 1.3 nos muestra un vector F cuya magnitud es de 40 unidades, que tiene una dirección de 45° al nordeste y un sentido hacia arriba. La expresión al nordeste indica que el ángulo se forma rotando, a partir de la dirección este, una línea hacia el norte.
La Figura 1.4 muestra el desplazamiento (D) de un objeto, cuya magnitud es de 5 metros, que tiene una dirección vertical y un sentido hacia el norte.
24
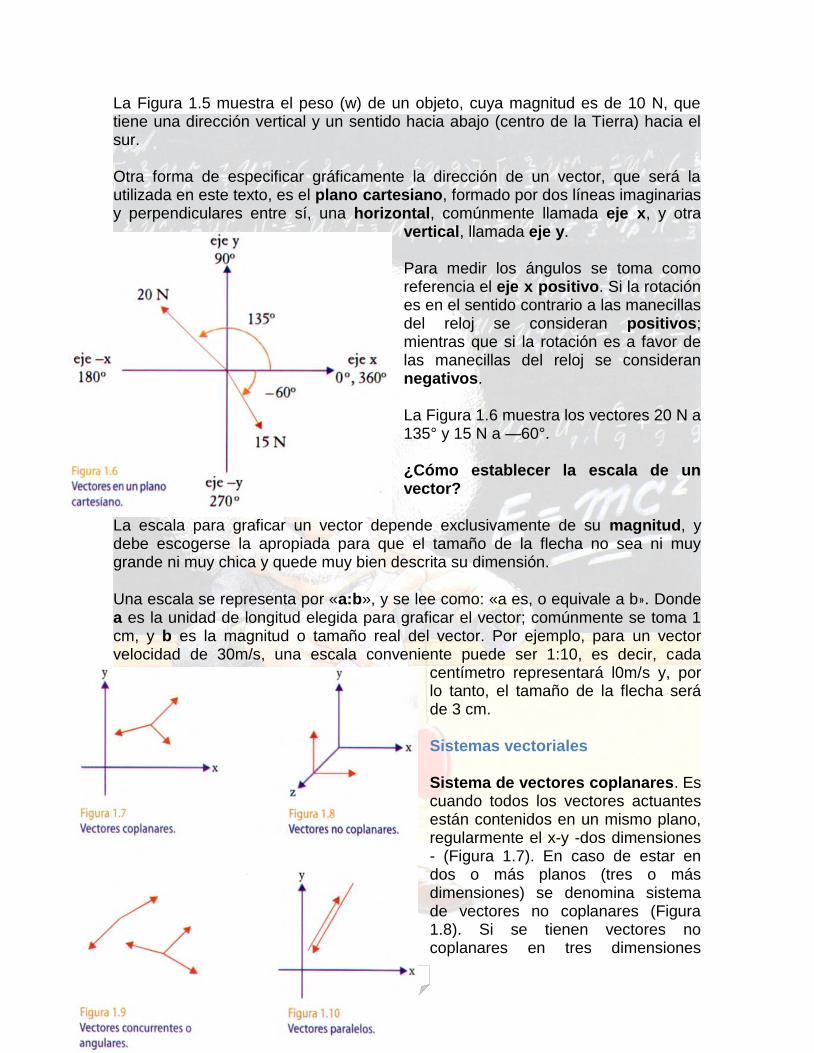
La Figura 1.5 muestra el peso (w) de un objeto, cuya magnitud es de 10 N, que tiene una dirección vertical y un sentido hacia abajo (centro de la Tierra) hacia el sur. Otra forma de especificar gráficamente la dirección de un vector, que será la utilizada en este texto, es el plano cartesiano, formado por dos líneas imaginarias y perpendiculares entre sí, una horizontal, comúnmente llamada eje x, y otra
vertical, llamada eje y. Para medir los ángulos se toma como referencia el eje x positivo. Si la rotación es en el sentido contrario a las manecillas del reloj se consideran positivos; mientras que si la rotación es a favor de las manecillas del reloj se consideran negativos. La Figura 1.6 muestra los vectores 20 N a 135° y 15 N a —60°. ¿Cómo establecer la escala de un vector?
La escala para graficar un vector depende exclusivamente de su magnitud, y debe escogerse la apropiada para que el tamaño de la flecha no sea ni muy grande ni muy chica y quede muy bien descrita su dimensión. Una escala se representa por «a:b», y se lee como: «a es, o equivale a b». Donde a es la unidad de longitud elegida para graficar el vector; comúnmente se toma 1 cm, y b es la magnitud o tamaño real del vector. Por ejemplo, para un vector velocidad de 30m/s, una escala conveniente puede ser 1:10, es decir, cada
centímetro representará l0m/s y, por lo tanto, el tamaño de la flecha será de 3 cm. Sistemas vectoriales Sistema de vectores coplanares. Es cuando todos los vectores actuantes están contenidos en un mismo plano, regularmente el x-y -dos dimensiones - (Figura 1.7). En caso de estar en dos o más planos (tres o más dimensiones) se denomina sistema de vectores no coplanares (Figura 1.8). Si se tienen vectores no coplanares en tres dimensiones
25
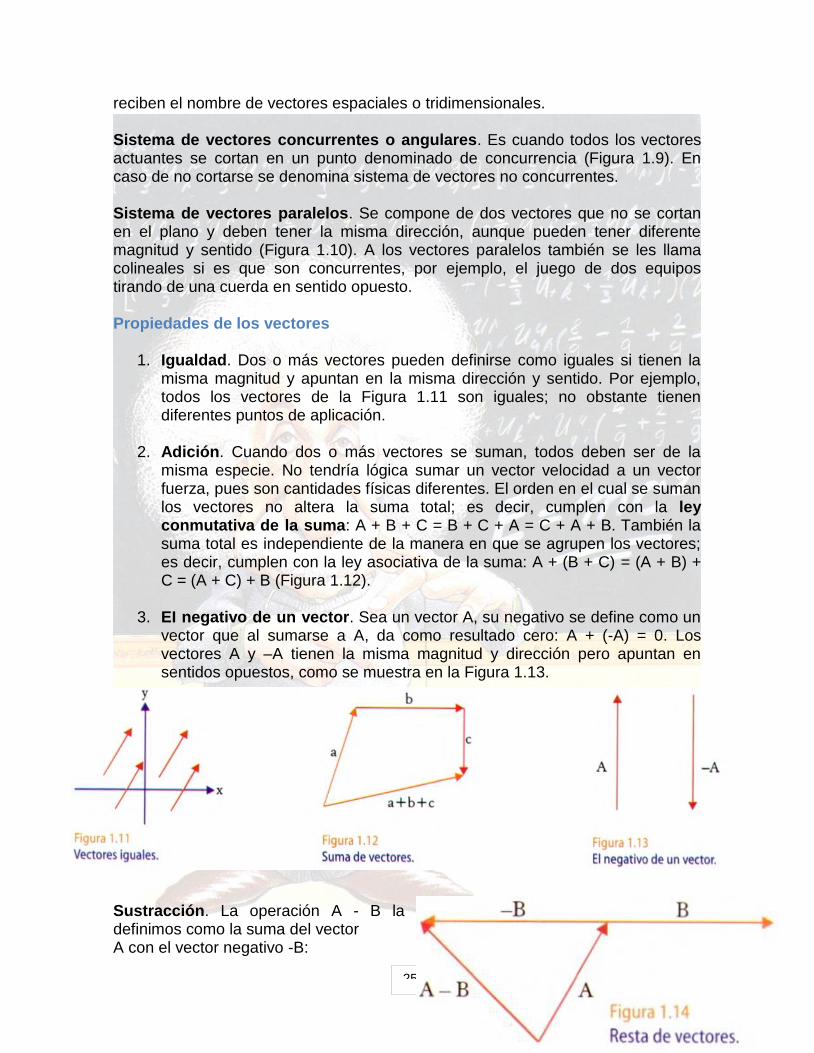
reciben el nombre de vectores espaciales o tridimensionales. Sistema de vectores concurrentes o angulares. Es cuando todos los vectores actuantes se cortan en un punto denominado de concurrencia (Figura 1.9). En caso de no cortarse se denomina sistema de vectores no concurrentes. Sistema de vectores paralelos. Se compone de dos vectores que no se cortan en el plano y deben tener la misma dirección, aunque pueden tener diferente magnitud y sentido (Figura 1.10). A los vectores paralelos también se les llama colineales si es que son concurrentes, por ejemplo, el juego de dos equipos tirando de una cuerda en sentido opuesto. Propiedades de los vectores
1. Igualdad. Dos o más vectores pueden definirse como iguales si tienen la misma magnitud y apuntan en la misma dirección y sentido. Por ejemplo, todos los vectores de la Figura 1.11 son iguales; no obstante tienen diferentes puntos de aplicación.
2. Adición. Cuando dos o más vectores se suman, todos deben ser de la
misma especie. No tendría lógica sumar un vector velocidad a un vector fuerza, pues son cantidades físicas diferentes. El orden en el cual se suman los vectores no altera la suma total; es decir, cumplen con la ley conmutativa de la suma: A + B + C = B + C + A = C + A + B. También la suma total es independiente de la manera en que se agrupen los vectores; es decir, cumplen con la ley asociativa de la suma: A + (B + C) = (A + B) + C = (A + C) + B (Figura 1.12).
3. EI negativo de un vector. Sea un vector A, su negativo se define como un
vector que al sumarse a A, da como resultado cero: A + (-A) = 0. Los vectores A y –A tienen la misma magnitud y dirección pero apuntan en sentidos opuestos, como se muestra en la Figura 1.13.
Sustracción. La operación A - B la definimos como la suma del vector A con el vector negativo -B:
26
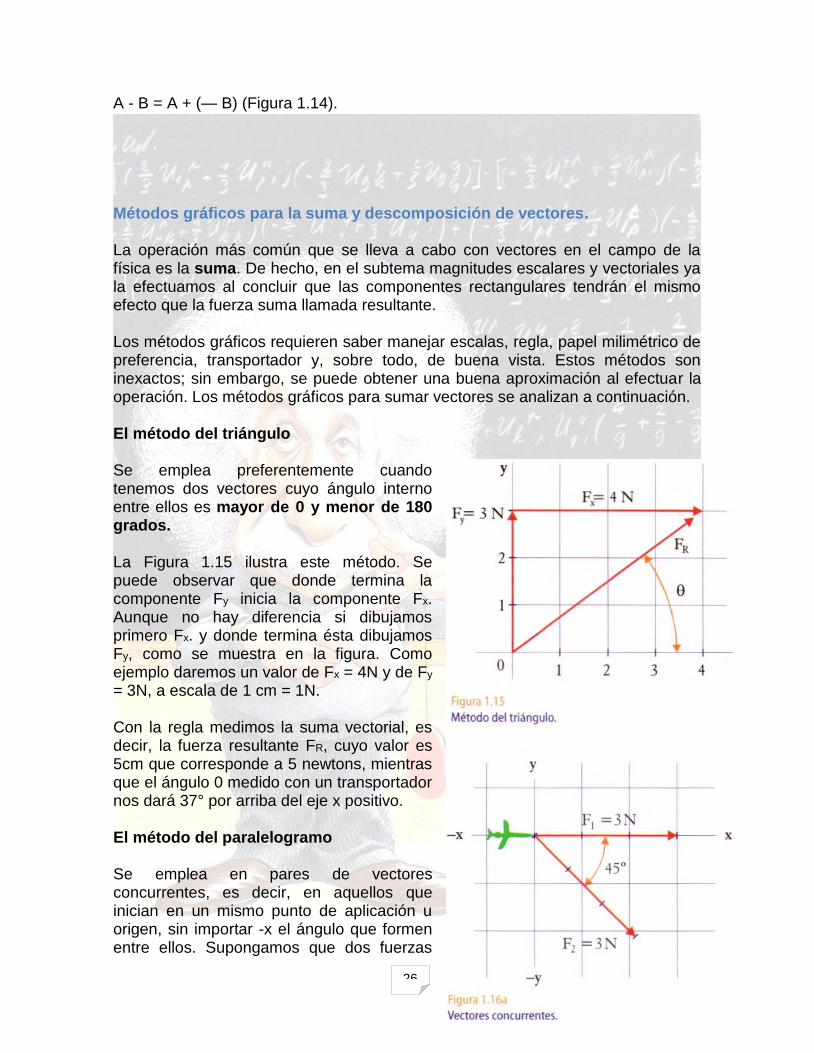
A - B = A + (— B) (Figura 1.14). Métodos gráficos para la suma y descomposición de vectores. La operación más común que se lleva a cabo con vectores en el campo de la física es la suma. De hecho, en el subtema magnitudes escalares y vectoriales ya la efectuamos al concluir que las componentes rectangulares tendrán el mismo efecto que la fuerza suma llamada resultante. Los métodos gráficos requieren saber manejar escalas, regla, papel milimétrico de preferencia, transportador y, sobre todo, de buena vista. Estos métodos son inexactos; sin embargo, se puede obtener una buena aproximación al efectuar la operación. Los métodos gráficos para sumar vectores se analizan a continuación. El método del triángulo Se emplea preferentemente cuando tenemos dos vectores cuyo ángulo interno entre ellos es mayor de 0 y menor de 180 grados. La Figura 1.15 ilustra este método. Se puede observar que donde termina la componente Fy inicia la componente Fx. Aunque no hay diferencia si dibujamos primero Fx. y donde termina ésta dibujamos Fy, como se muestra en la figura. Como ejemplo daremos un valor de Fx = 4N y de Fy = 3N, a escala de 1 cm = 1N. Con la regla medimos la suma vectorial, es decir, la fuerza resultante FR, cuyo valor es 5cm que corresponde a 5 newtons, mientras que el ángulo 0 medido con un transportador nos dará 37° por arriba del eje x positivo. El método del paralelogramo Se emplea en pares de vectores concurrentes, es decir, en aquellos que inician en un mismo punto de aplicación u origen, sin importar -x el ángulo que formen entre ellos. Supongamos que dos fuerzas
27
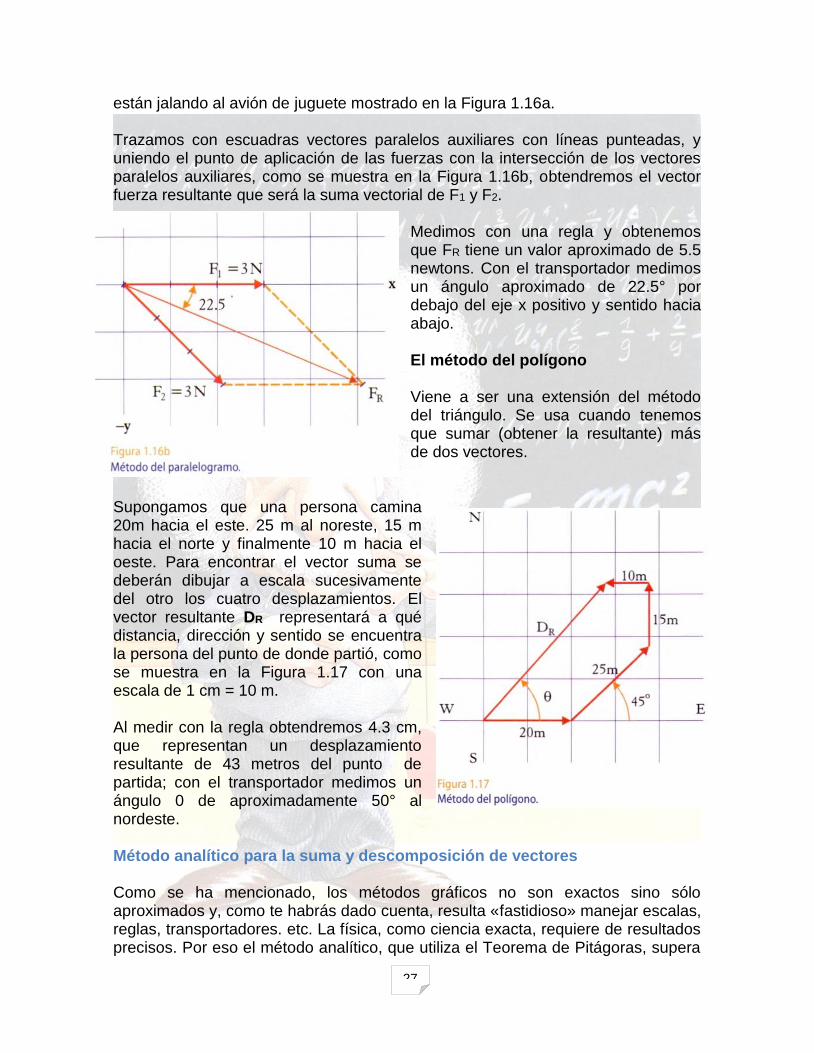
están jalando al avión de juguete mostrado en la Figura 1.16a. Trazamos con escuadras vectores paralelos auxiliares con líneas punteadas, y uniendo el punto de aplicación de las fuerzas con la intersección de los vectores paralelos auxiliares, como se muestra en la Figura 1.16b, obtendremos el vector fuerza resultante que será la suma vectorial de F1 y F2.
Medimos con una regla y obtenemos que FR tiene un valor aproximado de 5.5 newtons. Con el transportador medimos un ángulo aproximado de 22.5° por debajo del eje x positivo y sentido hacia abajo. El método del polígono Viene a ser una extensión del método del triángulo. Se usa cuando tenemos que sumar (obtener la resultante) más de dos vectores.
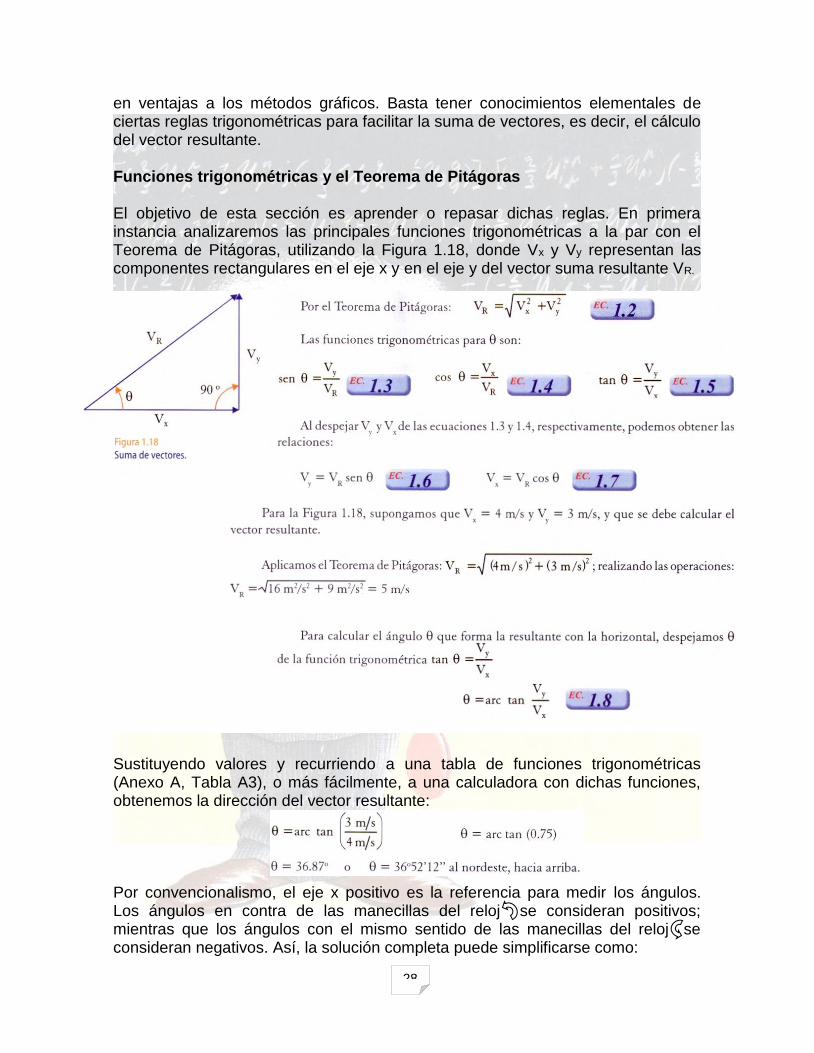
Supongamos que una persona camina 20m hacia el este. 25 m al noreste, 15 m hacia el norte y finalmente 10 m hacia el oeste. Para encontrar el vector suma se deberán dibujar a escala sucesivamente del otro los cuatro desplazamientos. El vector resultante DR representará a qué distancia, dirección y sentido se encuentra la persona del punto de donde partió, como se muestra en la Figura 1.17 con una escala de 1 cm = 10 m. Al medir con la regla obtendremos 4.3 cm, que representan un desplazamiento resultante de 43 metros del punto de partida; con el transportador medimos un ángulo 0 de aproximadamente 50° al nordeste. Método analítico para la suma y descomposición de vectores Como se ha mencionado, los métodos gráficos no son exactos sino sólo aproximados y, como te habrás dado cuenta, resulta «fastidioso» manejar escalas, reglas, transportadores. etc. La física, como ciencia exacta, requiere de resultados precisos. Por eso el método analítico, que utiliza el Teorema de Pitágoras, supera
28
en ventajas a los métodos gráficos. Basta tener conocimientos elementales de ciertas reglas trigonométricas para facilitar la suma de vectores, es decir, el cálculo del vector resultante. Funciones trigonométricas y el Teorema de Pitágoras El objetivo de esta sección es aprender o repasar dichas reglas. En primera instancia analizaremos las principales funciones trigonométricas a la par con el Teorema de Pitágoras, utilizando la Figura 1.18, donde Vx y Vy representan las componentes rectangulares en el eje x y en el eje y del vector suma resultante VR.
Sustituyendo valores y recurriendo a una tabla de funciones trigonométricas (Anexo A, Tabla A3), o más fácilmente, a una calculadora con dichas funciones, obtenemos la dirección del vector resultante: Por convencionalismo, el eje x positivo es la referencia para medir los ángulos. Los ángulos en contra de las manecillas del reloj se consideran positivos; mientras que los ángulos con el mismo sentido de las manecillas del reloj se consideran negativos. Así, la solución completa puede simplificarse como:
29
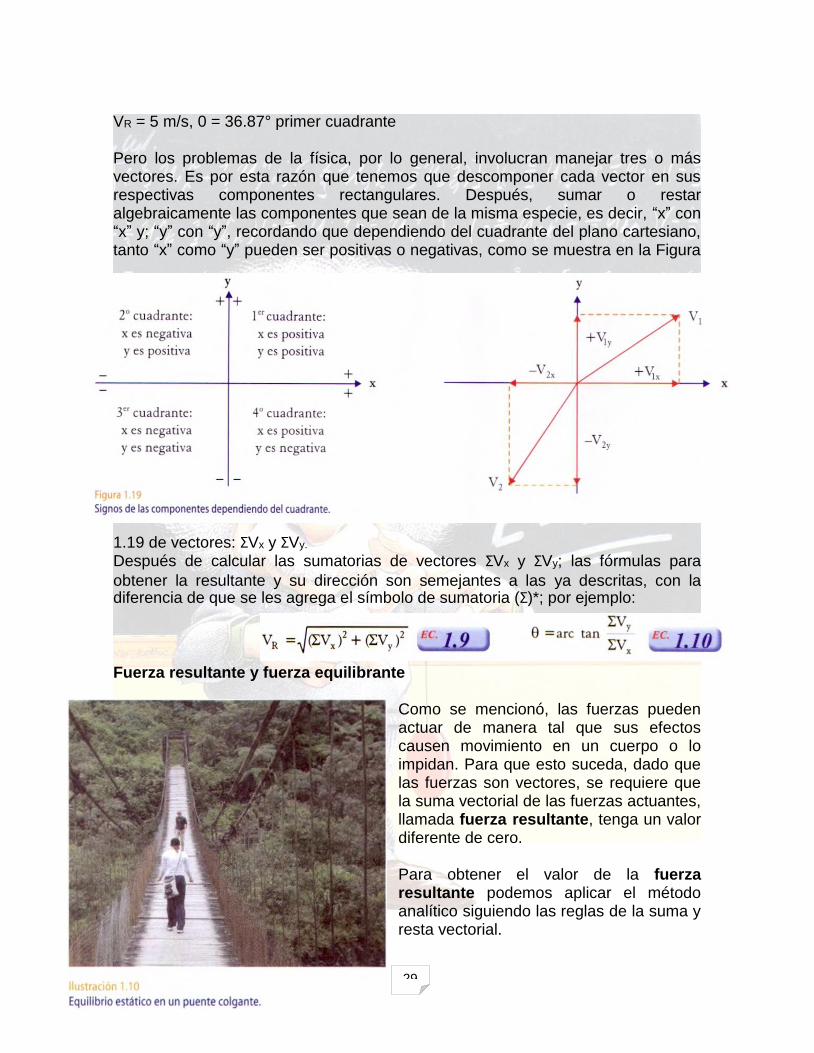
VR = 5 m/s, 0 = 36.87° primer cuadrante Pero los problemas de la física, por lo general, involucran manejar tres o más vectores. Es por esta razón que tenemos que descomponer cada vector en sus respectivas componentes rectangulares. Después, sumar o restar algebraicamente las componentes que sean de la misma especie, es decir, “x” con “x” y; “y” con “y”, recordando que dependiendo del cuadrante del plano cartesiano, tanto “x” como “y” pueden ser positivas o negativas, como se muestra en la Figura
1.19 de vectores: ΣVx y ΣVy.
Después de calcular las sumatorias de vectores ΣVx y ΣVy; las fórmulas para
obtener la resultante y su dirección son semejantes a las ya descritas, con la diferencia de que se les agrega el símbolo de sumatoria (Σ)*; por ejemplo:
Fuerza resultante y fuerza equilibrante
Como se mencionó, las fuerzas pueden actuar de manera tal que sus efectos causen movimiento en un cuerpo o lo impidan. Para que esto suceda, dado que las fuerzas son vectores, se requiere que la suma vectorial de las fuerzas actuantes, llamada fuerza resultante, tenga un valor diferente de cero. Para obtener el valor de la fuerza resultante podemos aplicar el método analítico siguiendo las reglas de la suma y resta vectorial.
30
Por otro lado, cuando las fuerzas que actúan sobre un objeto se requiera que estén equilibradas por una fuerza llamada fuerza equilibrante, significa que no debe haber fuerza resultante (FR = 0): es decir, la fuerza equilibrante debe anular los efectos de todas las demás fuerzas actuantes. Esto es posible anulando las componentes rectangulares en los ejes x—y para tener las fuerzas en equilibrio. Por ejemplo: un puente, un edificio, una antena de telecomunicaciones, una casa, un semáforo colgante, un anuncio, etc. En éstos y otros casos el efecto global de las fuerzas actuantes debe anularse en los ejes rectangulares y en todos los puntos de la estructura, con la finalidad de mantener un equilibrio estático, como se muestra en la Ilustración 1.10.
BLOQUE 2 TIPOS DE MOVIMIENTO Unidad de competencia Identifica las principales características de los diferentes tipos de movimiento en una y dos dimensiones, y establece la diferencia entre cada uno de ellos.
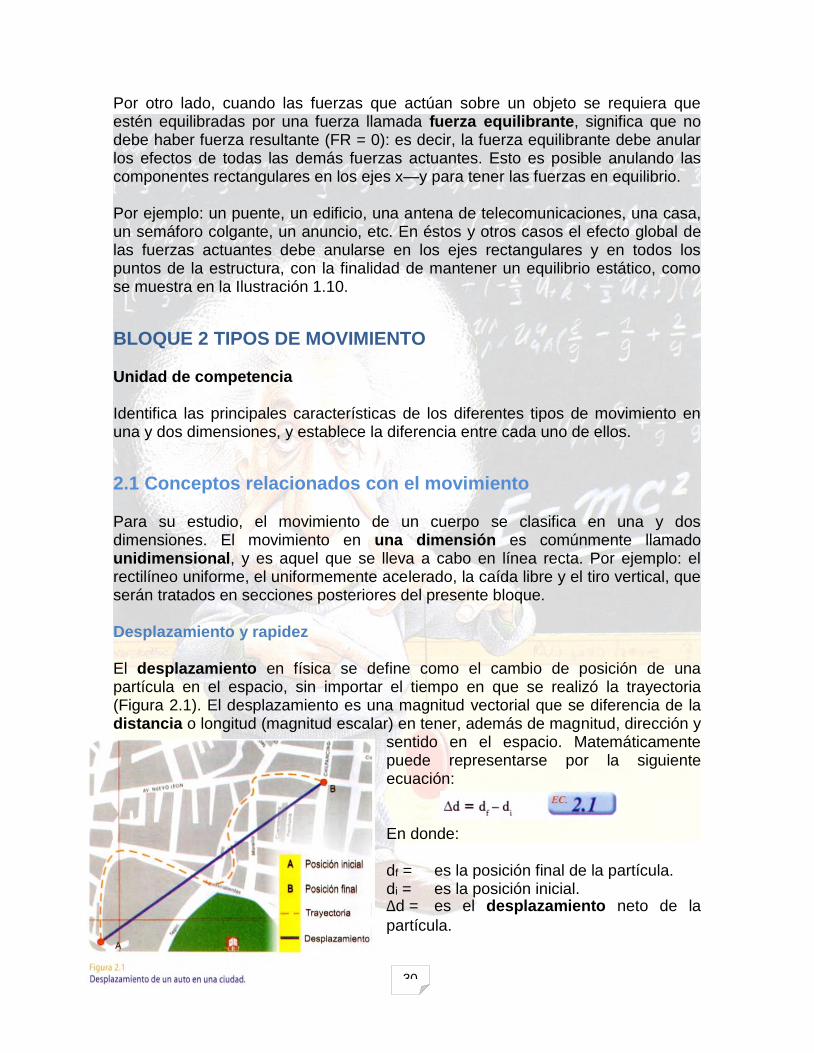
2.1 Conceptos relacionados con el movimiento Para su estudio, el movimiento de un cuerpo se clasifica en una y dos dimensiones. El movimiento en una dimensión es comúnmente llamado unidimensional, y es aquel que se lleva a cabo en línea recta. Por ejemplo: el rectilíneo uniforme, el uniformemente acelerado, la caída libre y el tiro vertical, que serán tratados en secciones posteriores del presente bloque. Desplazamiento y rapidez El desplazamiento en física se define como el cambio de posición de una partícula en el espacio, sin importar el tiempo en que se realizó la trayectoria (Figura 2.1). El desplazamiento es una magnitud vectorial que se diferencia de la distancia o longitud (magnitud escalar) en tener, además de magnitud, dirección y
sentido en el espacio. Matemáticamente puede representarse por la siguiente ecuación: En donde: df = es la posición final de la partícula. di = es la posición inicial. Δd = es el desplazamiento neto de la
partícula.
31
Sus unidades comunes son: en el SI, el metro; en el Sistema Inglés, el pie; y en el Sistema Ingles, el pie; y en el cgs, el centímetro. Por lo general, consideramos di = 0, por ser el punto en el cual se inicia nuestro estudio. Por ejemplo, cuando decimos «fui a correr 10 km» o «manejé mi auto hoy
100 km» no tomamos en cuenta ningún desplazamiento anterior. Hablamos de la rapidez cuando se involucra al tiempo; decimos que una partícula en movimiento recorre cierta distancia en un intervalo de tiempo dado. Por ejemplo: corrí 10 km en media hora» o «manejé mi auto 100 km en una hora»
Matemáticamente, la rapidez queda expresada por la ecuación: Luego entonces, definimos a la rapidez (magnitud escalar) como la distancia recorrida por una partícula en la unidad de tiempo, sin tener en cuenta la dirección y el sentido del movimiento. En otras palabras, la rapidez es una medida que indica qué tan rápido se mueve un objeto o una partícula. Se puede usar cualquier combinación de unidades de distancia y tiempo para expresar una rapidez según se requiera o convenga. Por ejemplo, las más comunes: m/s, en el SI; ft/s, en el sistema inglés, y cm/s, en el cgs. La diagonal (/) se lee »por». La rapidez instantánea es, como su nombre lo indica, la rapidez en un instante determinado. Pero su aplicación es limitada porque en la rapidez no queda definida la dirección en la cual se mueve la partícula. Velocidad media y velocidad instantánea Cuando se tiene que viajar de un punto a otro por carretera, por ejemplo, de la ciudad de Xalapa a la planta nucleoelectrica de Laguna Verde (ambas en el estado de Veracruz), el recorrido incluye un «rodeo» que debe hacerse por diversos motivos, principalmente las pendientes generadas por la topografía. Si se hace en un automóvil, el recorrido total será de alrededor de 50 km, pero el desplazamiento real será de aproximadamente 35 km. ¿Cuál es la diferencia entre el recorrido y el desplazamiento? La diferencia es que vectorialmente lo más importante es la distancia resultante entre ambos puntos, independientemente de la ruta que se siga para unirlos. Es muy común decir que si un automovilista
32
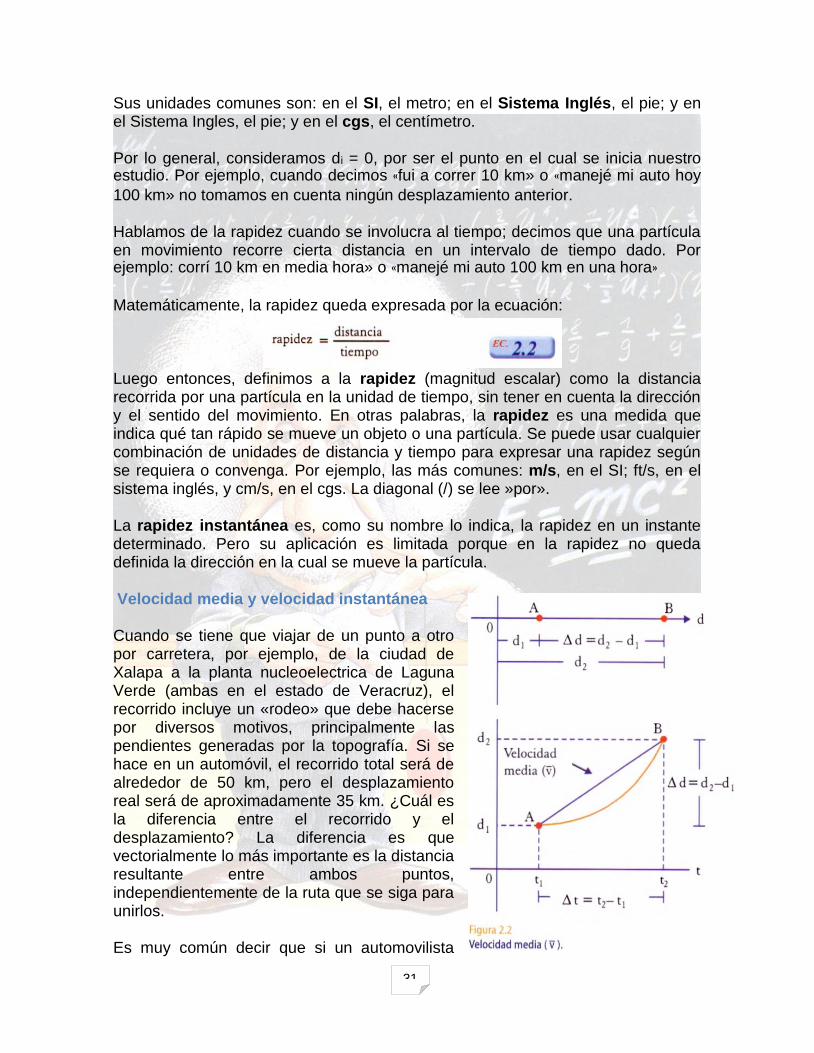
recorrió una distancia de 80 km entre dos puntos A y B en una hora, éste viajó a una velocidad de 80 km/h durante toda la hora. Sin embargo, esto no es cierto debido a las curvas, rebases, tramos rectos libres, etc., por lo que no podremos afirmar que el velocímetro haya marcado siempre esa velocidad de manera uniforme. En curvas es común reducir la velocidad e incluso detenerse a pagar una caseta, mientras que en tramos rectos libres se incrementa. Por las razones anteriores, la forma apropiada de expresarse es que el automovilista viajó a una velocidad promedio, que en física llamamos velocidad media (v), de 80 kilómetros por hora, en una dirección determinada. Para definir velocidad media nos apoyaremos en la Figura 2.2. Consideremos que el auto se encontraba en un punto A de ordenada d1 en el tiempo t1, y se desplaza hasta un punto B de ordenada d2 en el tiempo t2. Deducimos que el auto se desplazo una distancia (d2 – d1) que equivale a los 80km; lo representaremos por Δd en un tiempo (t2 – t1), que corresponde a una hora, y lo simbolizaremos por Δt
De lo anterior, definimos a la velocidad media (v) como la razón del desplazamiento Δd al intervalo de tiempo transcurrido Δt en una dirección
determinada, ya que es una magnitud vectorial. Esto no es más que la pendiente o inclinación de la recta que une al punto de partida (A) con el punto de llegada (B), que podemos obtener por la función trigonométrica tangente (cateto opuesto sobre cateto adyacente). Por lo general, tomamos como origen o referencia el instante en el cual se inicia el desplazamiento; esto hace que d1 = 0 en t1 = 0 y que no tenga caso usar el subíndice 2, simplificándose la ecuación anterior a: Las unidades más comunes para la velocidad media son: m/s (metros por segundo) en el SI, cm/s (centímetros por segundo) en el cgs y ft/s (pies por segundo) en el inglés. Su uso dependerá del sistema físico en estudio. Haciendo referencia a la Figura 2.2, la curva es una sucesión de infinidad de puntos que representan en forma real la velocidad del móvil en cada instante. Mediante este razonamiento, podemos definir a la velocidad instantánea (u) como la velocidad de un cuerpo en cierto instante o en cierto punto de su trayectoria, que no es más que la pendiente o inclinación de dicho punto respecto a la curva. Si recordamos un poco de trigonometría, un ángulo medido en sentido contrario a las manecillas del reloj es considerado positivo (ver Figura 2.3), y si se mide en el
33
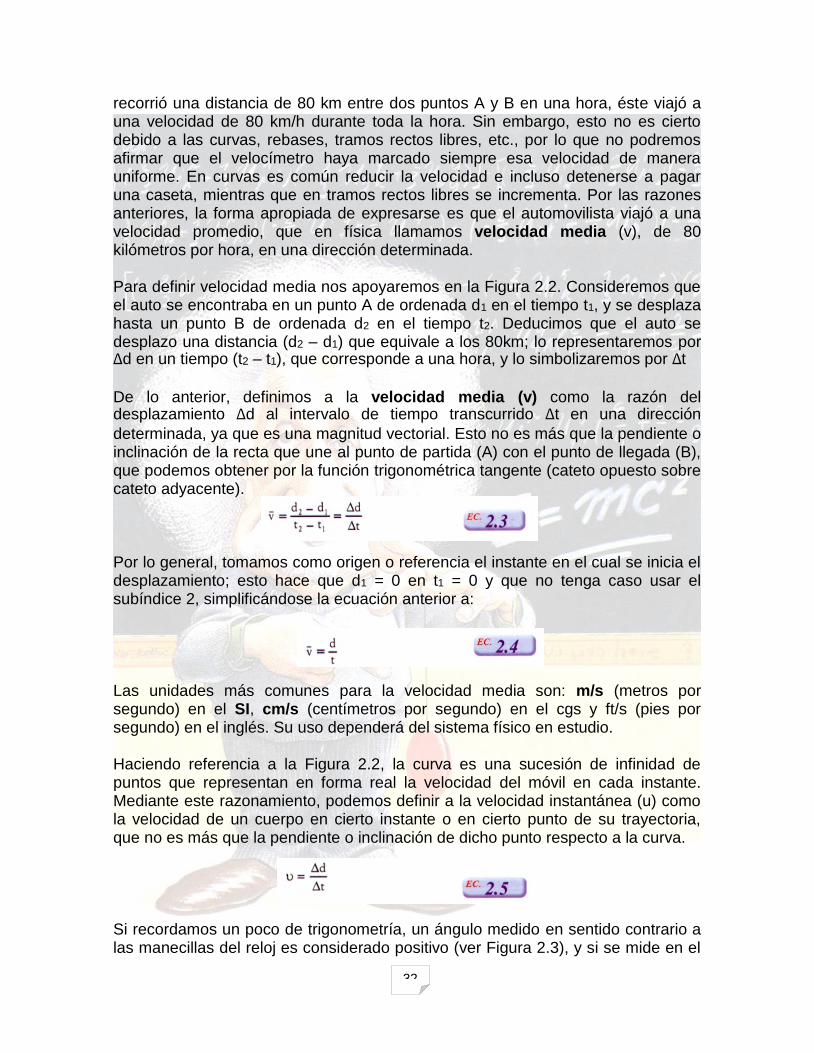
sentido de las manecillas del reloj es un ángulo negativo (ver Figura 2.4); de igual forma, el valor de la tangente de ese ángulo toma el mismo signo, y con la tangente, la pendiente de la recta. De ahí que si la pendiente es positiva en los diagramas señalados, es porque la velocidad aumenta, mientras que si la velocidad disminuye, la pendiente
de la recta será negativa. Cuando nos referimos sólo a su valor, hablamos de rapidez o velocidad escalar, que se simboliza por υ. Si damos además su dirección y sentido nos referimos a la velocidad vectorial, que se simboliza por V. Las unidades en los sistemas métricos son las mismas que para la velocidad media, dadas al inicio de esta sección. Finalmente, es necesario mencionar que si la pendiente en términos del ángulo θ es positiva, entonces representará una velocidad positiva (Figura 2.3). Por el contrario, si la pendiente es negativa, representará velocidad negativa (Figura 2.4). Y si la pendiente es nula (θ = 0°), la velocidad tendrá un valor de cero (Figura 2.5). O bien, visto de otra forma, la velocidad es positiva si d2 > d1; es decir, la velocidad hace que el cuerpo se aleje de la referencia; mientras que la velocidad se considera negativa si d1 > d2; es decir, la velocidad hace que el cuerpo se acerque a la referencia. Aceleración media y aceleración instantánea Cuando un cuerpo incrementa su velocidad se dice que se está acelerando. Si reduce su velocidad se dice que se está desacelerando (aceleración negativa). Y si su velocidad permanece constante, la aceleración vale cero. Cuando en el movimiento de un cuerpo se realizan cambios de velocidad de igual magnitud en periodos de tiempos iguales, se dice que dicho cuerpo desarrolla una aceleración constante o uniforme. Resumiendo: la aceleración media (ā) es una magnitud vectorial que se define como la variación de la velocidad vectorial por unidad de tiempo. Como ecuación:
34
en donde V0 es la velocidad inicial y Vf la final un tiempo t más tarde. Las unidades usuales para la aceleración son: m/s2 (metros por segundo al cuadrado) en el SI; cm/s2 (centímetros por segundo al cuadrado) en el cgs y ft /s2 (pies por segundo al cuadrado) en el inglés.
2.2 Movimiento en una dimensión Sistemas de referencia: absoluto y relativo En la mayoría de los casos de estudio del movimiento tomamos como marco de referencia particular a la Tierra. Cuando se dice que un transbordador espacial se desplaza a 7.5 kilómetros por segundo, o cualquier otro objeto que nos rodea, es respecto a la superficie terrestre, a menos que se indique otra referencia. A este sistema de referencia terrestre, por el cual en forma cotidiana nos regimos, se le llama absoluto. Sin embargo, existe una infinidad de referencias que pueden ser tomadas para describir el movimiento. Por ejemplo, todo objeto en reposo sobre la superficie de la Tierra está moviéndose a razón de unos 30 kilómetros por segundo respecto al Sol, y más rápido respecto al centro de nuestra galaxia, y aún más rápido respecto a otras galaxias del universo, pero para nosotros no se mueve. De igual forma, una persona que ve pasar un tren y un automóvil que va más aprisa verá dichos movimientos desde el reposo; mientras que el pasajero del tren verá cómo se queda atrás la persona y cómo se adelanta el automóvil; y el conductor de éste verá cómo se queda atrás el tren y todavía más rápidamente atrás la persona que está en reposo. De los dos últimos párrafos, podemos concluir que en realidad todo movimiento es relativo, ya que puede ser medible respecto a diversos sistemas de referencias que, a su vez, también son relativos. El sistema de referencia que elijamos dependerá del interés sobre el cual necesitemos realizar nuestro estudio del móvil en movimiento. Como se mencionó, observadores situados en diferentes marcos de referencia pueden medir desplazamientos, velocidades y aceleraciones diferentes para un cuerpo dado; es decir, dos observadores que se mueven diferente uno respecto al otro no concuerdan en sus resultados de medición. Por ejemplo, si dos autos se mueven en la misma dirección con velocidades de 70km/h y 50 km/h, un pasajero en el auto más lento medirá la velocidad del auto más rápido respecto del más lento como de 20 km/h. Así también, un observador en reposo determinará que las velocidades son de 70 y 50 km/h, respectivamente. Consecuentemente, las mediciones difieren desde marcos de referencia diferentes.
35
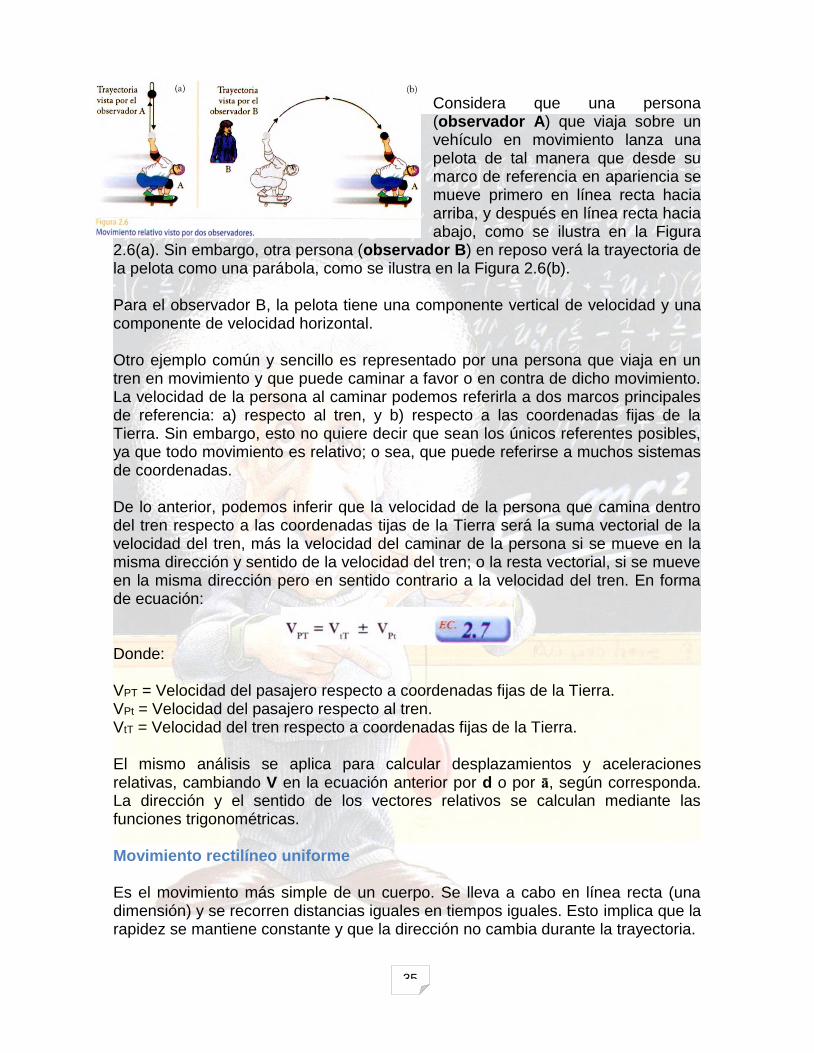
Considera que una persona (observador A) que viaja sobre un vehículo en movimiento lanza una pelota de tal manera que desde su marco de referencia en apariencia se mueve primero en línea recta hacia arriba, y después en línea recta hacia abajo, como se ilustra en la Figura
2.6(a). Sin embargo, otra persona (observador B) en reposo verá la trayectoria de la pelota como una parábola, como se ilustra en la Figura 2.6(b). Para el observador B, la pelota tiene una componente vertical de velocidad y una componente de velocidad horizontal. Otro ejemplo común y sencillo es representado por una persona que viaja en un tren en movimiento y que puede caminar a favor o en contra de dicho movimiento. La velocidad de la persona al caminar podemos referirla a dos marcos principales de referencia: a) respecto al tren, y b) respecto a las coordenadas fijas de la Tierra. Sin embargo, esto no quiere decir que sean los únicos referentes posibles, ya que todo movimiento es relativo; o sea, que puede referirse a muchos sistemas de coordenadas. De lo anterior, podemos inferir que la velocidad de la persona que camina dentro del tren respecto a las coordenadas tijas de la Tierra será la suma vectorial de la velocidad del tren, más la velocidad del caminar de la persona si se mueve en la misma dirección y sentido de la velocidad del tren; o la resta vectorial, si se mueve en la misma dirección pero en sentido contrario a la velocidad del tren. En forma de ecuación: Donde: VPT = Velocidad del pasajero respecto a coordenadas fijas de la Tierra. VPt = Velocidad del pasajero respecto al tren. VtT = Velocidad del tren respecto a coordenadas fijas de la Tierra. El mismo análisis se aplica para calcular desplazamientos y aceleraciones relativas, cambiando V en la ecuación anterior por d o por ā, según corresponda. La dirección y el sentido de los vectores relativos se calculan mediante las funciones trigonométricas. Movimiento rectilíneo uniforme Es el movimiento más simple de un cuerpo. Se lleva a cabo en línea recta (una dimensión) y se recorren distancias iguales en tiempos iguales. Esto implica que la rapidez se mantiene constante y que la dirección no cambia durante la trayectoria.

36
Es un movimiento muy difícil de conseguir con exactitud porque debe cumplir que la rapidez instantánea, en cualquier punto de la trayectoria, sea la misma en magnitud: con ello, que la rapidez media sea igual a la instantánea y, por lo tanto, que no haya aceleración. La ecuación que define al movimiento rectilíneo uniforme viene dada por la Ecuación 2.8.
Movimiento rectilíneo uniformemente acelerado Haciendo referencia a la figura 2.7, podemos observar que en forma constante en el intervalo 1 el auto fue incrementando cada segundo, desde el reposo, su velocidad en 5 m/s hasta llegar a 20 m/s en 4 segundos. Lo anterior equivale a decir que el ritmo de crecimiento de la velocidad denominada aceleración es uniforme y es 5m/s2. Mientras que en el intervalo 3 la velocidad
fue disminuyendo uniformemente 6.67 m/s cada segundo hasta llegar al reposo (desaceleración). Un caso especial en donde la aceleración es igual a cero se presenta en el intervalo 2 debido a que la velocidad del auto no cambia: se mantuvo en 20 m/s. Entonces, a aceleración constante, la velocidad del cuerpo en movimiento aumenta o disminuye uniformemente con el tiempo. Como consecuencia, la velocidad media es simplemente la mitad de la suma de las velocidades inicial y final. Si despejamos de la Ecuación (2.4) a d, y sustituimos V por la Ecuación (2.9), resulta: Ahora, reemplazando a t por su valor despejado de la Ecuación (2.6): Efectuando operaciones y despejando V2
f, tendremos:
37
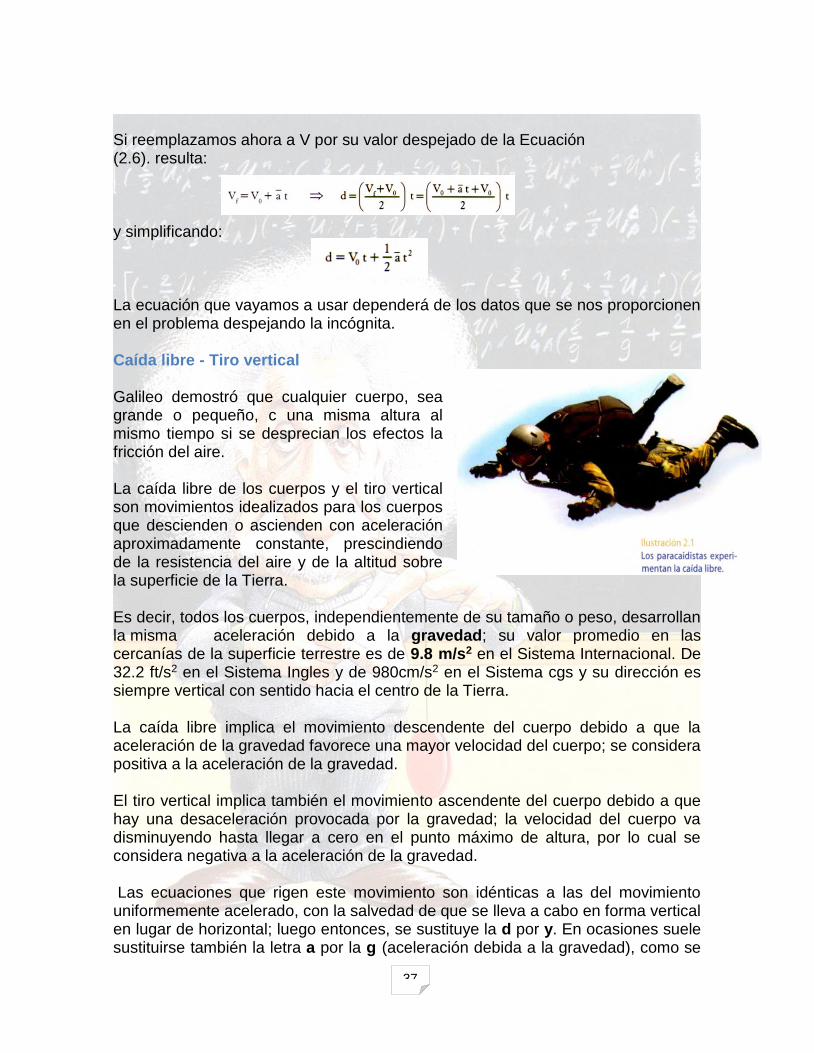
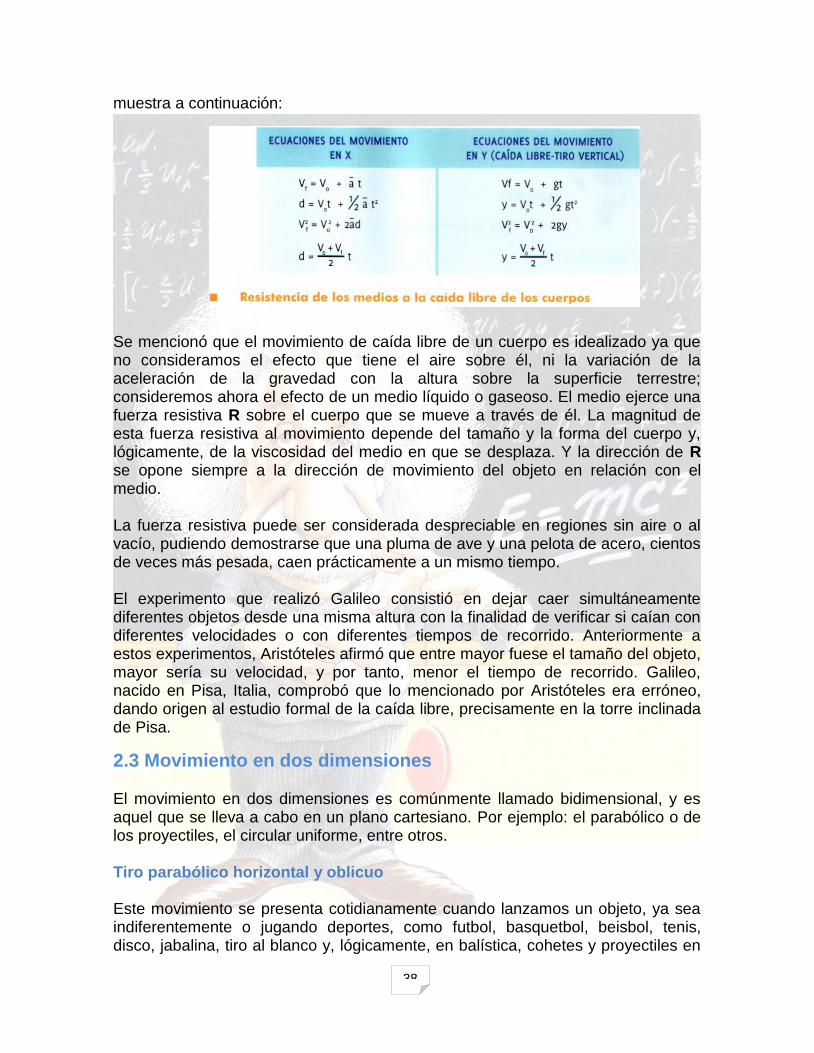
Si reemplazamos ahora a V por su valor despejado de la Ecuación (2.6). resulta: y simplificando: La ecuación que vayamos a usar dependerá de los datos que se nos proporcionen en el problema despejando la incógnita. Caída libre - Tiro vertical Galileo demostró que cualquier cuerpo, sea grande o pequeño, c una misma altura al mismo tiempo si se desprecian los efectos la fricción del aire. La caída libre de los cuerpos y el tiro vertical son movimientos idealizados para los cuerpos que descienden o ascienden con aceleración aproximadamente constante, prescindiendo de la resistencia del aire y de la altitud sobre la superficie de la Tierra. Es decir, todos los cuerpos, independientemente de su tamaño o peso, desarrollan la misma aceleración debido a la gravedad; su valor promedio en las cercanías de la superficie terrestre es de 9.8 m/s2 en el Sistema Internacional. De 32.2 ft/s2 en el Sistema Ingles y de 980cm/s2 en el Sistema cgs y su dirección es siempre vertical con sentido hacia el centro de la Tierra. La caída libre implica el movimiento descendente del cuerpo debido a que la aceleración de la gravedad favorece una mayor velocidad del cuerpo; se considera positiva a la aceleración de la gravedad. El tiro vertical implica también el movimiento ascendente del cuerpo debido a que hay una desaceleración provocada por la gravedad; la velocidad del cuerpo va disminuyendo hasta llegar a cero en el punto máximo de altura, por lo cual se considera negativa a la aceleración de la gravedad. Las ecuaciones que rigen este movimiento son idénticas a las del movimiento uniformemente acelerado, con la salvedad de que se lleva a cabo en forma vertical en lugar de horizontal; luego entonces, se sustituye la d por y. En ocasiones suele sustituirse también la letra a por la g (aceleración debida a la gravedad), como se
38
muestra a continuación: Se mencionó que el movimiento de caída libre de un cuerpo es idealizado ya que no consideramos el efecto que tiene el aire sobre él, ni la variación de la aceleración de la gravedad con la altura sobre la superficie terrestre; consideremos ahora el efecto de un medio líquido o gaseoso. El medio ejerce una fuerza resistiva R sobre el cuerpo que se mueve a través de él. La magnitud de esta fuerza resistiva al movimiento depende del tamaño y la forma del cuerpo y, lógicamente, de la viscosidad del medio en que se desplaza. Y la dirección de R se opone siempre a la dirección de movimiento del objeto en relación con el medio. La fuerza resistiva puede ser considerada despreciable en regiones sin aire o al vacío, pudiendo demostrarse que una pluma de ave y una pelota de acero, cientos de veces más pesada, caen prácticamente a un mismo tiempo. El experimento que realizó Galileo consistió en dejar caer simultáneamente diferentes objetos desde una misma altura con la finalidad de verificar si caían con diferentes velocidades o con diferentes tiempos de recorrido. Anteriormente a estos experimentos, Aristóteles afirmó que entre mayor fuese el tamaño del objeto, mayor sería su velocidad, y por tanto, menor el tiempo de recorrido. Galileo, nacido en Pisa, Italia, comprobó que lo mencionado por Aristóteles era erróneo, dando origen al estudio formal de la caída libre, precisamente en la torre inclinada de Pisa.
2.3 Movimiento en dos dimensiones El movimiento en dos dimensiones es comúnmente llamado bidimensional, y es aquel que se lleva a cabo en un plano cartesiano. Por ejemplo: el parabólico o de los proyectiles, el circular uniforme, entre otros. Tiro parabólico horizontal y oblicuo Este movimiento se presenta cotidianamente cuando lanzamos un objeto, ya sea indiferentemente o jugando deportes, como futbol, basquetbol, beisbol, tenis, disco, jabalina, tiro al blanco y, lógicamente, en balística, cohetes y proyectiles en
39
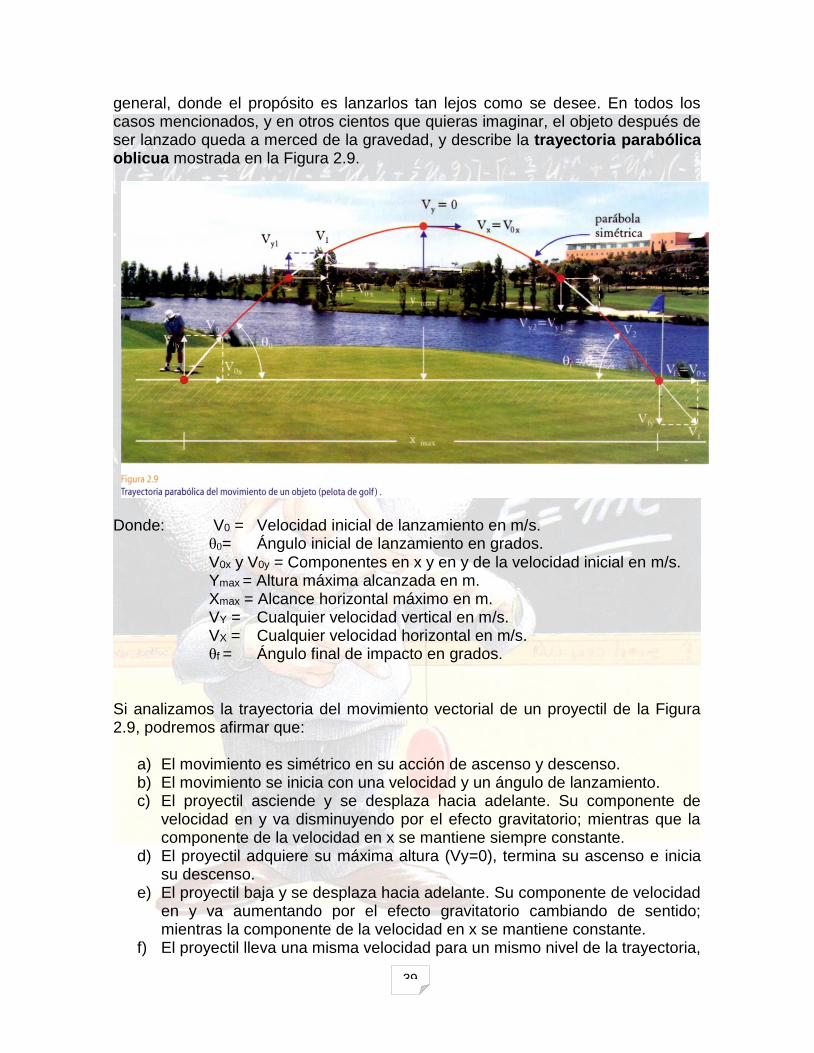
general, donde el propósito es lanzarlos tan lejos como se desee. En todos los casos mencionados, y en otros cientos que quieras imaginar, el objeto después de ser lanzado queda a merced de la gravedad, y describe la trayectoria parabólica oblicua mostrada en la Figura 2.9.
Donde: V0 = Velocidad inicial de lanzamiento en m/s. θ0= Ángulo inicial de lanzamiento en grados.
V0x y V0y = Componentes en x y en y de la velocidad inicial en m/s. Ymax = Altura máxima alcanzada en m. Xmax = Alcance horizontal máximo en m. VY = Cualquier velocidad vertical en m/s.
VX = Cualquier velocidad horizontal en m/s. θf = Ángulo final de impacto en grados.
Si analizamos la trayectoria del movimiento vectorial de un proyectil de la Figura 2.9, podremos afirmar que:
a) El movimiento es simétrico en su acción de ascenso y descenso. b) El movimiento se inicia con una velocidad y un ángulo de lanzamiento. c) El proyectil asciende y se desplaza hacia adelante. Su componente de
velocidad en y va disminuyendo por el efecto gravitatorio; mientras que la componente de la velocidad en x se mantiene siempre constante.
d) El proyectil adquiere su máxima altura (Vy=0), termina su ascenso e inicia su descenso.
e) El proyectil baja y se desplaza hacia adelante. Su componente de velocidad en y va aumentando por el efecto gravitatorio cambiando de sentido; mientras la componente de la velocidad en x se mantiene constante.
f) El proyectil lleva una misma velocidad para un mismo nivel de la trayectoria,
40
aunque diferente dirección y sentido; por ejemplo, en la Figura 2.9 Vy2 = Vy1.
Lo que es más, regresa al suelo con la misma velocidad y ángulo con que fue lanzado.
g) El tiempo de ascenso idealmente lo consideramos igual al tiempo de descenso.
De lo anterior, podemos concluir que el movimiento de un proyectil es una combinación de dos movimientos:
1. En el eje horizontal (x), su comportamiento es el de un movimiento
rectilíneo uniforme, ya que durante toda la trayectoria es constante (V0x = Vx).
2. En el eje vertical (y), su comportamiento es el de un movimiento vertical
uniformemente acelerado como el tiro vertical y la caída libre, por lo que se usarán las mismas fórmulas de estos movimientos.
Si se desea obtener el máximo alcance horizontal, el ángulo de lanzamiento debe hacerse a 45°. Mientras que para calcular el ángulo con el cual habrá de dispararse un proyectil para dar en el blanco, usaremos la fórmula: Donde: R= La distancia al blanco y no podrá ser mayor que el alcance máximo a 45°. g = Aceleración de la gravedad. El tiro parabólico horizontal seda a partir del punto superior de la Figura 2.9, en el cual la velocidad inicial en el eje Y es cero y la velocidad en el eje X tiene un cierto valor. Este movimiento se presenta, por ejemplo, cuando desde un avión se
deja simplemente caer un objeto o cuando éste se mueve horizontalmente y cae del borde de una superficie, por ejemplo una mesa, un acantilado, etcétera (Figura 2.10).
41
Al igual que en el movimiento parabólico oblicuo, la velocidad en el eje X se mantiene constante, y en el eje Y el movimiento es uniformemente acelerado debido a la gravedad por lo que las ecuaciones a emplear son las mismas, y lo único que cambia es el marco de referencia.
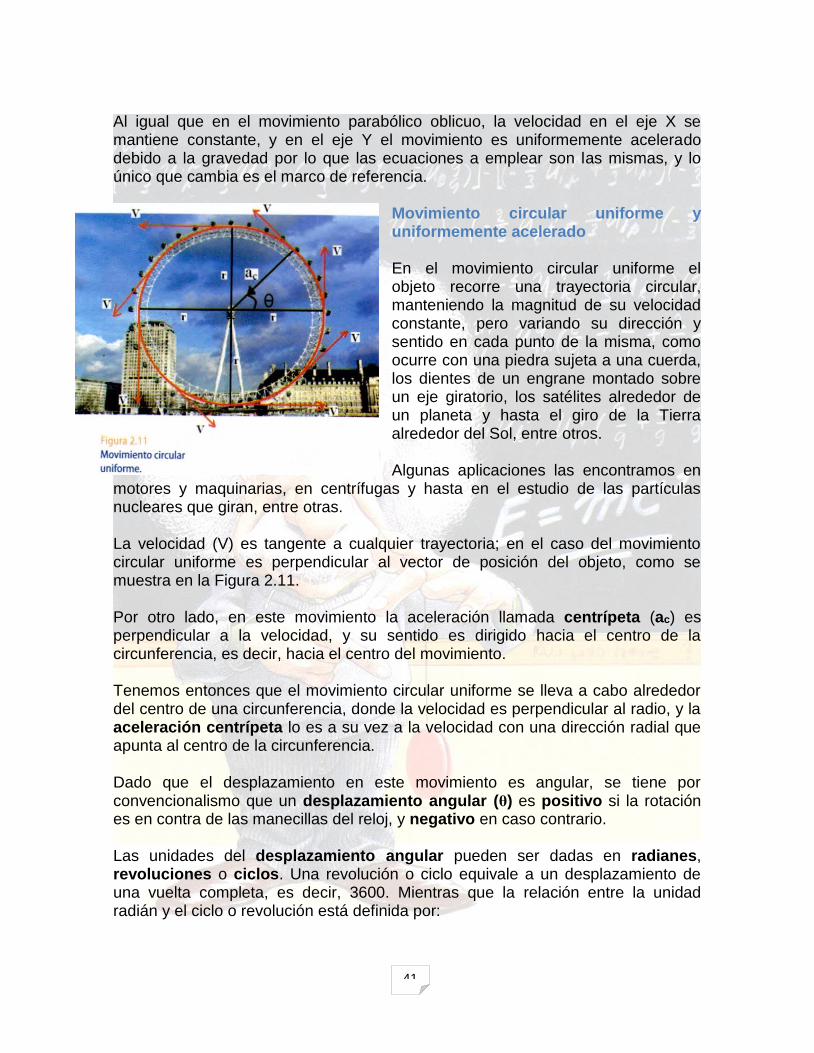
Movimiento circular uniforme y uniformemente acelerado En el movimiento circular uniforme el objeto recorre una trayectoria circular, manteniendo la magnitud de su velocidad constante, pero variando su dirección y sentido en cada punto de la misma, como ocurre con una piedra sujeta a una cuerda, los dientes de un engrane montado sobre un eje giratorio, los satélites alrededor de un planeta y hasta el giro de la Tierra alrededor del Sol, entre otros. Algunas aplicaciones las encontramos en
motores y maquinarias, en centrífugas y hasta en el estudio de las partículas nucleares que giran, entre otras. La velocidad (V) es tangente a cualquier trayectoria; en el caso del movimiento circular uniforme es perpendicular al vector de posición del objeto, como se muestra en la Figura 2.11. Por otro lado, en este movimiento la aceleración llamada centrípeta (ac) es perpendicular a la velocidad, y su sentido es dirigido hacia el centro de la circunferencia, es decir, hacia el centro del movimiento. Tenemos entonces que el movimiento circular uniforme se lleva a cabo alrededor del centro de una circunferencia, donde la velocidad es perpendicular al radio, y la aceleración centrípeta lo es a su vez a la velocidad con una dirección radial que apunta al centro de la circunferencia. Dado que el desplazamiento en este movimiento es angular, se tiene por convencionalismo que un desplazamiento angular (θ) es positivo si la rotación es en contra de las manecillas del reloj, y negativo en caso contrario. Las unidades del desplazamiento angular pueden ser dadas en radianes, revoluciones o ciclos. Una revolución o ciclo equivale a un desplazamiento de una vuelta completa, es decir, 3600. Mientras que la relación entre la unidad radián y el ciclo o revolución está definida por:
42
1 radián = 57.3° = 0.1592 revoluciones 1 revolución = 6.28 radianes Si contamos el número de vueltas que da el objeto en la unidad de tiempo, a esta cantidad se le conoce como frecuencia (f), y la unidad que lo define es el hertz (hz). 1rpm (revolución por minuto) = 0.1047 rad/seg Por otro lado, otra cantidad importante es el tiempo que ocupa el objeto en completar una revolución o ciclo; a ésta se le denomina periodo (T), y sus unidades son las del tiempo, es decir, segundos, minutos, etc. La frecuencia y el periodo resultan ser cantidades inversas definidas por la ecuación siguiente: El hecho de que en este movimiento el desplazamiento sea angular nos conduce a que la velocidad también lo sea.
a) Velocidad angular (ω) y velocidad lineal (V) La velocidad angular (ω) es el cambio en la posición angular (ángulo) de un cuerpo entre el tiempo (t) utilizado en realizarlo, dada en rad/s, y cuya expresión matemática es: La velocidad angular, en cuanto a su signo, mantiene el mismo convencionalismo que el ya mencionado para el desplazamiento, y podemos expresarla en velocidad lineal si conocemos el radio (r) de la circunferencia por la siguiente ecuación: La velocidad lineal también recibe el nombre de velocidad tangencial.
b) Aceleración centrípeta o radial (aC) La aceleración centrípeta es el cambio en la velocidad lineal que experimenta un objeto que da una vuelta completa en un tiempo (t); está dirigida hacia el centro del radio de giro y definida por la siguiente ecuación:
43
o sustituyendo la Ecuación 2.20: Donde la velocidad lineal queda definida por el perímetro de la circunferencia (2,t), entre el tiempo que ocupa en hacerlo, que previamente definimos como periodo (T). La aceleración centrípeta sólo produce cambios en la dirección de la velocidad, mas no en la magnitud de la misma. Todos los ejemplos dados al principio del presente tema tienen una aceleración centrípeta respecto al eje del cual giran.
c) Aceleración angular o tangencial () Del mismo modo como definimos a la aceleración de un cuerpo en movimiento
lineal como el cambio de la velocidad en el tiempo, la aceleración angular () de un cuerpo en rotación está definida como el cambio de la velocidad angular (ω) entre el tiempo transcurrido. La ecuación matemática que relaciona a la velocidad y aceleración angular es: Donde ωf y ω0 son las velocidades angulares final e inicial en radianes sobre
segundo (rad/s), t es el tiempo en segundos (s) y es la aceleración angular expresada en rad/s2. Podemos concluir que el movimiento circular uniforme es aquél donde la aceleración angular es nula, la velocidad angular es constante y la trayectoria circular (cambio de dirección) es debida a la aceleración centrípeta. En contraste, el movimiento circular uniformemente acelerado es aquel que tiene aceleración angular, la velocidad angular cambia y la trayectoria circular (cambio de dirección) es debida a la aceleración centrípeta. Las ecuaciones que definen al movimiento circular uniforme, matemáticamente, no diferente de las ecuaciones del movimiento lineal, como se muestra a continuación en la Tabla comparativa 2.1.
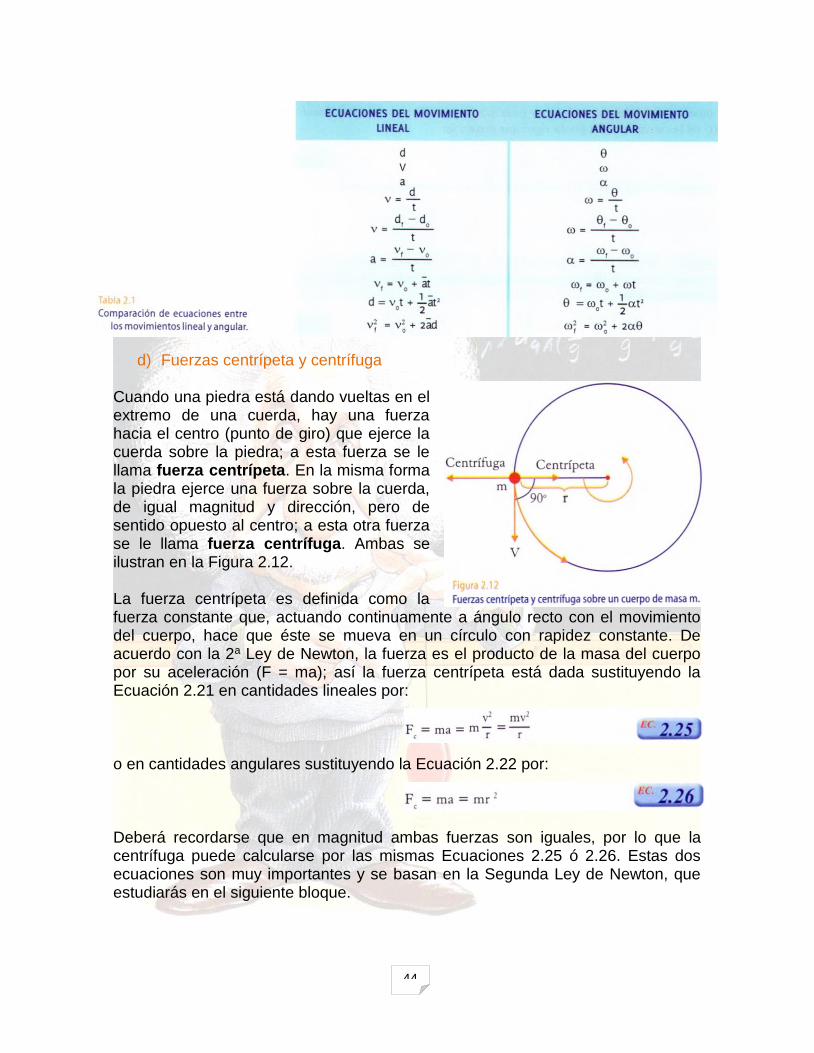
44
d) Fuerzas centrípeta y centrífuga Cuando una piedra está dando vueltas en el extremo de una cuerda, hay una fuerza hacia el centro (punto de giro) que ejerce la cuerda sobre la piedra; a esta fuerza se le llama fuerza centrípeta. En la misma forma la piedra ejerce una fuerza sobre la cuerda, de igual magnitud y dirección, pero de sentido opuesto al centro; a esta otra fuerza se le llama fuerza centrífuga. Ambas se ilustran en la Figura 2.12. La fuerza centrípeta es definida como la fuerza constante que, actuando continuamente a ángulo recto con el movimiento del cuerpo, hace que éste se mueva en un círculo con rapidez constante. De acuerdo con la 2a Ley de Newton, la fuerza es el producto de la masa del cuerpo por su aceleración (F = ma); así la fuerza centrípeta está dada sustituyendo la Ecuación 2.21 en cantidades lineales por: o en cantidades angulares sustituyendo la Ecuación 2.22 por: Deberá recordarse que en magnitud ambas fuerzas son iguales, por lo que la centrífuga puede calcularse por las mismas Ecuaciones 2.25 ó 2.26. Estas dos ecuaciones son muy importantes y se basan en la Segunda Ley de Newton, que estudiarás en el siguiente bloque.
45
BLOQUE 3 LEYES DEL MOVIMIENTO DE NEWTON Unidad de competencia Analiza las leyes de Newton para explicar el movimiento de los cuerpos y las utiliza para resolver problemas relacionados con el movimiento observable en su entorno.
3.1 Generalidades sobre la dinámica Comenzaremos definiendo a la dinámica como la paute de la física que estudia conjuntamente el movimiento y la tuerza resultante que lo origina. Es de nuestro conocimiento, por experiencias cotidianas, que para que un cuerpo se mueva requiere de una fuerza suficiente; por ejemplo, el automóvil, de la tuerza impulsora de su motor; el jet, de la fuerza impulsora de su turbina, nuestros brazos, de nuestros músculos, etc. Podemos así concluir que las fuerzas son las causantes de todos los movimientos de los cuerpos, si son suficientes. Sin embargo, reflexionando sobre otras experiencias cotidianas, ¿cuántas veces no hemos podido mover un cuerpo con nuestra fuerza? Esto nos lleva a intuir que la fuerza no es un elemento aislado para provocar el movimiento o cambio de velocidad, sino que está íntimamente relacionad con otros factores físicos del cuerpo y del medio ambiente que lo rodea. ¿Qué harías para mover y aumentar la velocidad de un automóvil que no arranca por si solo? Es casi seguro que después de reflexionar contestarás:
a) Pediría ayuda a otros, lo cual significa que aumentaría la fuerza que se aplica a favor del movimiento del auto. De esto concluimos que la fuerza aplicada está en relación directa con el movimiento o cambio de velocidad que se produce en un cuerpo.
b) Pediría a sus ocupantes que se bajaran, lo cual significaría que disminuiría la masa, es decir, la resistencia que presenta todo cuerpo para ser movido o cambiar su velocidad. De esto podemos concluir que la masa está en relación inversa con el movimiento o cambio de velocidad que se produce en un cuerpo.

46
c) Aplicaría la fuerza durante más tiempo para permitir que el auto adquiera mayor velocidad y pueda ser arrancado por el chofer, lo cual significa que con un empujón que dure más tiempo incrementamos la cantidad del movimiento. De esto consideramos que el tiempo de aplicación de una fuerza está en relación directa con el cambio de velocidad que se produce en un cuerpo.
Ahora, si analizamos y reflexionamos sobre el medio ambiente que rodea al auto, podríamos decir, con la finalidad de favorecer el movimiento o cambio de velocidad:
a) Aplicar la fuerza en la dirección y el sentido en que sople el viento, en caso de haberlo, de tal manera que la fuerza del viento sobre el auto se sume a la aplicada.
b) Aplicar la fuerza en la dirección y el sentido de una pendiente de bajada, en caso de haberla, de tal manera que la fuerza de gravedad por la pendiente de bajada se sume a la aplicada.
Antes de continuar es necesario explicar o recordar, apoyándonos en la Ilustración 3.2, que el rozamiento se debe a irregularidades microscópicas de las superficies. Cuando dos superficies están en contacto, sus irregularidades tienden a encajarse, lo que impide o dificulta que ambas superficies se deslicen suavemente una sobre otra. Por ejemplo, un lubricante eficaz forma una capa entre la superficie que impide que las irregularidades entren en contacto. El rozamiento da origen a fuerzas que se oponen, en mayor o menor grado, al movimiento o cambio de velocidad, dependiendo de la rugosidad de las superficies y del área de contacto. Así, concluimos que el problema general de la dinámica, desde el punto de vista clásico, es el siguiente: tenemos un cuerpo cuyas características conocemos; lo colocamos con una velocidad inicial conocida y en un medio ambiente también conocido. ¿Cómo continuará moviéndose el cuerpo? La metodología común para resolver este problema es:
1. Introducimos el concepto de fuerza �̅� y lo definimos en función del cambio
de velocidad, es decir, de la aceleración �̅� que experimenta el cuerpo.
2. Interrelacionamos las variables anteriores �̅� y �̅� con la finalidad de asignar una masa m al cuerpo, y con el objeto de comprobar el hecho de que
47
cuerpos de la misma naturaleza, en un mismo medio ambiente pero de diferentes masas, experimentan diferentes aceleraciones o cambios de velocidad.
3. Finalmente, calculamos las tuerzas que actúan sobre los cuerpos a partir de
sus propiedades y de las del medio ambiente. Es por medio de la metodología anterior que investigamos las leyes de las fuerzas. Isaac Newton, científico inglés, publicó en 1687, después de muchos años de investigación, Las leyes del movimiento, las cuales, como ya mencionamos, son la base de la dinámica. Estas leyes del movimiento son más conocidas, en honor a su descubridor, como: la Primera. Segunda y Tercera Ley de Newton, que estudiaremos y analizaremos durante el desarrollo de esta unidad.
3.2 Fuerza y peso A la acción cotidiana de empujar, jalar o presionar un cuerpo se le llama fuerza; ésta es una cantidad vectorial muy común e importante; algunos ejemplos de ella son: cuando estiramos o comprimimos un resorte; cuando se lanza o patea una pelota; un tráiler que jala su remolque o cuando empujamos un auto. Dos de los efectos producidos por las fuerzas y que se pueden medir son:
1.- modificar el movimiento de un cuerpo, y 2.- modificar la forma o las dimensiones de un cuerpo. El cambiar el movimiento de un cuerpo implica que éste se desplace con una aceleración positiva o negativa; es decir, que incremente o decremente la velocidad del cuerpo; por ejemplo, cuando jalamos un trineo o tratamos de detenerlo si previamente tenía una cierta velocidad. En estos casos diremos que se aplica una fuerza dinámica (Ilustración 3.3a). ¿Identificas otros ejemplos?
Por otro lado, cuando se modifica la forma o dimensión de un cuerpo, como sería el caso de comprimir un bote o una lata, decimos que se aplica una fuerza estática (Ilustración 3.3b). ¿Puedes mencionar otros ejemplos? Por ser la fuerza una cantidad vectorial, puede descomponerse en componentes rectangulares en un plano cartesiano x - y. En la Figura 3.1 se muestra un automóvil que es jalado con una fuerza F y un ángulo de aplicación θ respecto a la horizontal, así como sus componentes rectangulares Fx y Fy.

48
Por consiguiente: Fuerza: es una magnitud vectorial, producida por uno o varios agentes externos, que actúa sobre un cuerpo y que puede ejercer sobre él diferentes efectos: acelerarlo, frenarlo, desviarlo o deformarlo. Una de las fuerzas más comunes que conocemos es el peso (w) de los cuerpos, que se define como: Peso: es la fuerza con que la Tierra atrae a los cuerpos hacia su centro por la atracción gravitacional. Por lo anterior, la fuerza (F) y el peso (w) son magnitudes vectoriales. Sus unidades de medida y ecuaciones correspondientes las analizaremos durante el desarrollo del presente bloque. Clasificación de las fuerzas Hoy en día se considera que todas las fuerzas de la naturaleza son consecuencia de solamente unas pocas fuerzas fundamentales, por lo que todas las fuerzas que nos rodean pertenecen a una de ellas. Dichas fuerzas fundamentales son: - La gravedad - La electromagnética - La nuclear: fuerte y débil Fuerza de gravedad: es la fuerza con la que se atraen los cuerpos por el hecho de tener masa. La fuerza de gravedad está regida por la Ley de la Gravitación Universal de Newton. Es la responsable del peso de los cuerpos; de que la Luna gire alrededor de la Tierra; de las trayectorias que siguen las naves y sondas espaciales; de que los planetas giren alrededor del Sol; de la formación de hoyos negros; de que las estrellas se agrupen formando galaxias, entre otros fenómenos físicos. La fuerza de gravedad es la más débil de las antes citadas.
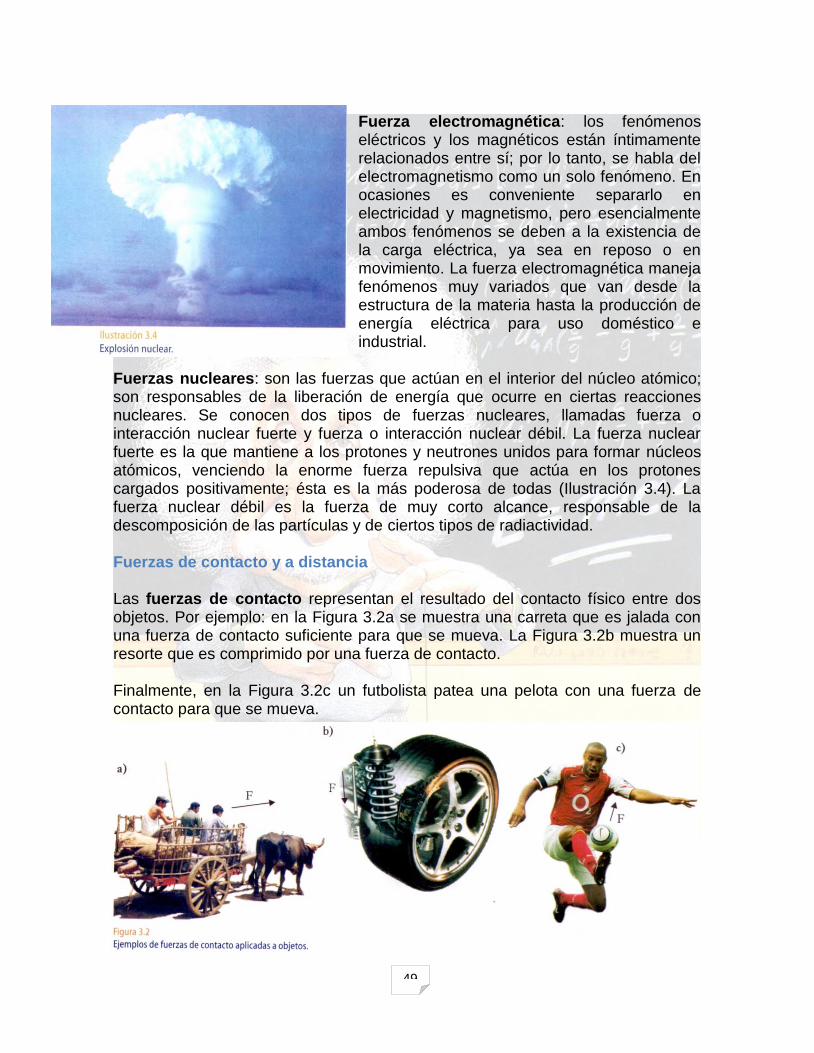
49
Fuerza electromagnética: los fenómenos eléctricos y los magnéticos están íntimamente relacionados entre sí; por lo tanto, se habla del electromagnetismo como un solo fenómeno. En ocasiones es conveniente separarlo en electricidad y magnetismo, pero esencialmente ambos fenómenos se deben a la existencia de la carga eléctrica, ya sea en reposo o en movimiento. La fuerza electromagnética maneja fenómenos muy variados que van desde la estructura de la materia hasta la producción de energía eléctrica para uso doméstico e industrial.
Fuerzas nucleares: son las fuerzas que actúan en el interior del núcleo atómico; son responsables de la liberación de energía que ocurre en ciertas reacciones nucleares. Se conocen dos tipos de fuerzas nucleares, llamadas fuerza o interacción nuclear fuerte y fuerza o interacción nuclear débil. La fuerza nuclear fuerte es la que mantiene a los protones y neutrones unidos para formar núcleos atómicos, venciendo la enorme fuerza repulsiva que actúa en los protones cargados positivamente; ésta es la más poderosa de todas (Ilustración 3.4). La fuerza nuclear débil es la fuerza de muy corto alcance, responsable de la descomposición de las partículas y de ciertos tipos de radiactividad. Fuerzas de contacto y a distancia Las fuerzas de contacto representan el resultado del contacto físico entre dos objetos. Por ejemplo: en la Figura 3.2a se muestra una carreta que es jalada con una fuerza de contacto suficiente para que se mueva. La Figura 3.2b muestra un resorte que es comprimido por una fuerza de contacto. Finalmente, en la Figura 3.2c un futbolista patea una pelota con una fuerza de contacto para que se mueva.

50
Las fuerzas a distancia no implican contacto físico entre dos objetos, pero su acción y efecto es a través del espacio libre: ejemplos: en la Figura 3.3a se muestra un imán fijo que ejerce una fuerza a distancia sobre un pedazo de metal para atraerlo. En la Figura 3.3b se muestra la fuerza a distancia llamada de atracción gravitacional entre las masas de dos cuerpos. Finalmente, en la Figura 3.3c un electrón y un protón ejercen una fuerza a distancia de atracción llamada fuerza eléctrica, esto debido a las cargas eléctricas de ambas partículas.
La fuerza y sus unidades de medida En el Sistema Internacional (SI), la unidad para medir la fuerza en función del cambio de movimiento que genera es el newton (N). Este se define como la fuerza que al aplicarse sobre un objeto con masa de un kilogramo le produce una aceleración de un metro sobre segundo cuadrado.
1 N = 1kg . 1 m/s2
En el Sistema Cegesimal (cgs) la unidad para medir la fuerza es la dina (d). Ésta es la fuerza que al aplicarse sobre un cuerpo con masa de un gramo le produce una aceleración de un centímetro sobre segundo cuadrado.
1 dina = 1gr . 1 cm/s2
La equivalencia entre estas dos unidades es:
1 N = 100 000 dinas y 1 dina = 1 x 10-5 N En el sistema inglés la fuerza es dada por la libra-fuerza (lbf). Ésta es la fuerza que al aplicarse sobre una masa de un kilogramo le produce una aceleración de un pie sobre segundo cuadrado.
1 libra – fuerza = 1 slug . ft/s2
La equivalencia entre estos tres sistemas de unidades es:
1 N = 0.2248 lbf, 1d = 2.248 x 10-6 1bf 1 lbf = 2.448N = 2.448 x 105 d La unidad de fuerza en función de la atracción que ejerce la Tierra sobre todo
cuerpo de masa igual a un kilogramo se define como kilogramo-fuerza (k𝐠𝐟). El

51
kilogramo-fuerza es la fuerza igual al peso de una masa de un kilogramo. 1 kilogramo-fuerza = 1 kilogramo-masa x 9.8 m/s2
¿Cómo se miden las fuerzas? Una forma muy común de medir fuerzas es mediante la balanza de resorte o dinamómetro, formado por un resorte y una escala graduada que permite que las lecturas sean correctas; el resorte se alarga en proporción directa a la fuerza aplicada. Imagina que deseamos medir la fuerza —y sus componentes— aplicada al automóvil mostrado en la Figura 3.1. Como se muestra en la Figura 3.4a, el dinamómetro que mide la componente vertical Fy da una lectura de 3 N; mientras que la Figura 3.4b ilustra una medición de 4 N para la componente horizontal Fx. La balanza de la Figura 3.4c mide el valor de la fuerza F mostrando una lectura de 5 N.
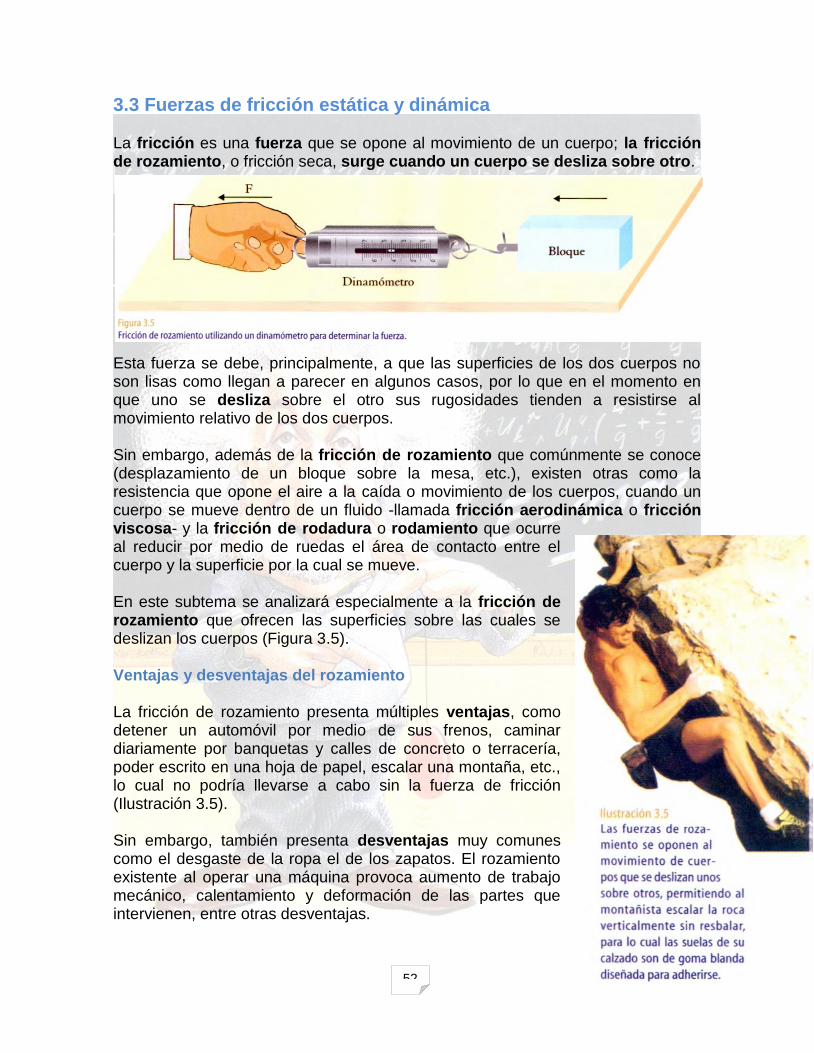
52
3.3 Fuerzas de fricción estática y dinámica La fricción es una fuerza que se opone al movimiento de un cuerpo; la fricción de rozamiento, o fricción seca, surge cuando un cuerpo se desliza sobre otro.
Esta fuerza se debe, principalmente, a que las superficies de los dos cuerpos no son lisas como llegan a parecer en algunos casos, por lo que en el momento en que uno se desliza sobre el otro sus rugosidades tienden a resistirse al movimiento relativo de los dos cuerpos. Sin embargo, además de la fricción de rozamiento que comúnmente se conoce (desplazamiento de un bloque sobre la mesa, etc.), existen otras como la resistencia que opone el aire a la caída o movimiento de los cuerpos, cuando un cuerpo se mueve dentro de un fluido -llamada fricción aerodinámica o fricción viscosa- y la fricción de rodadura o rodamiento que ocurre al reducir por medio de ruedas el área de contacto entre el cuerpo y la superficie por la cual se mueve. En este subtema se analizará especialmente a la fricción de rozamiento que ofrecen las superficies sobre las cuales se deslizan los cuerpos (Figura 3.5). Ventajas y desventajas del rozamiento La fricción de rozamiento presenta múltiples ventajas, como detener un automóvil por medio de sus frenos, caminar diariamente por banquetas y calles de concreto o terracería, poder escrito en una hoja de papel, escalar una montaña, etc., lo cual no podría llevarse a cabo sin la fuerza de fricción (Ilustración 3.5). Sin embargo, también presenta desventajas muy comunes como el desgaste de la ropa el de los zapatos. El rozamiento existente al operar una máquina provoca aumento de trabajo mecánico, calentamiento y deformación de las partes que intervienen, entre otras desventajas.
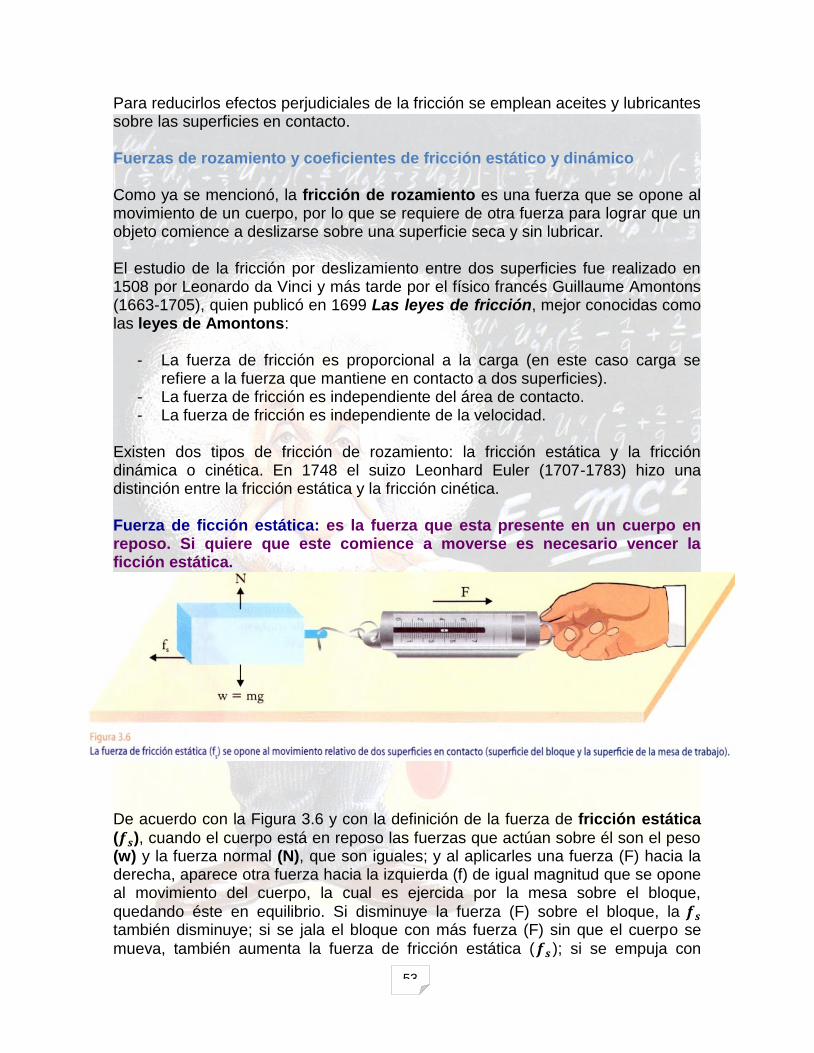
53
Para reducirlos efectos perjudiciales de la fricción se emplean aceites y lubricantes sobre las superficies en contacto. Fuerzas de rozamiento y coeficientes de fricción estático y dinámico Como ya se mencionó, la fricción de rozamiento es una fuerza que se opone al movimiento de un cuerpo, por lo que se requiere de otra fuerza para lograr que un objeto comience a deslizarse sobre una superficie seca y sin lubricar. El estudio de la fricción por deslizamiento entre dos superficies fue realizado en 1508 por Leonardo da Vinci y más tarde por el físico francés Guillaume Amontons (1663-1705), quien publicó en 1699 Las leyes de fricción, mejor conocidas como las leyes de Amontons:
- La fuerza de fricción es proporcional a la carga (en este caso carga se refiere a la fuerza que mantiene en contacto a dos superficies).
- La fuerza de fricción es independiente del área de contacto. - La fuerza de fricción es independiente de la velocidad.
Existen dos tipos de fricción de rozamiento: la fricción estática y la fricción dinámica o cinética. En 1748 el suizo Leonhard Euler (1707-1783) hizo una distinción entre la fricción estática y la fricción cinética. Fuerza de ficción estática: es la fuerza que esta presente en un cuerpo en reposo. Si quiere que este comience a moverse es necesario vencer la ficción estática.
De acuerdo con la Figura 3.6 y con la definición de la fuerza de fricción estática
(𝒇𝒔), cuando el cuerpo está en reposo las fuerzas que actúan sobre él son el peso (w) y la fuerza normal (N), que son iguales; y al aplicarles una fuerza (F) hacia la derecha, aparece otra fuerza hacia la izquierda (f) de igual magnitud que se opone al movimiento del cuerpo, la cual es ejercida por la mesa sobre el bloque,
quedando éste en equilibrio. Si disminuye la fuerza (F) sobre el bloque, la 𝒇𝒔 también disminuye; si se jala el bloque con más fuerza (F) sin que el cuerpo se
mueva, también aumenta la fuerza de fricción estática (𝒇𝒔 ); si se empuja con
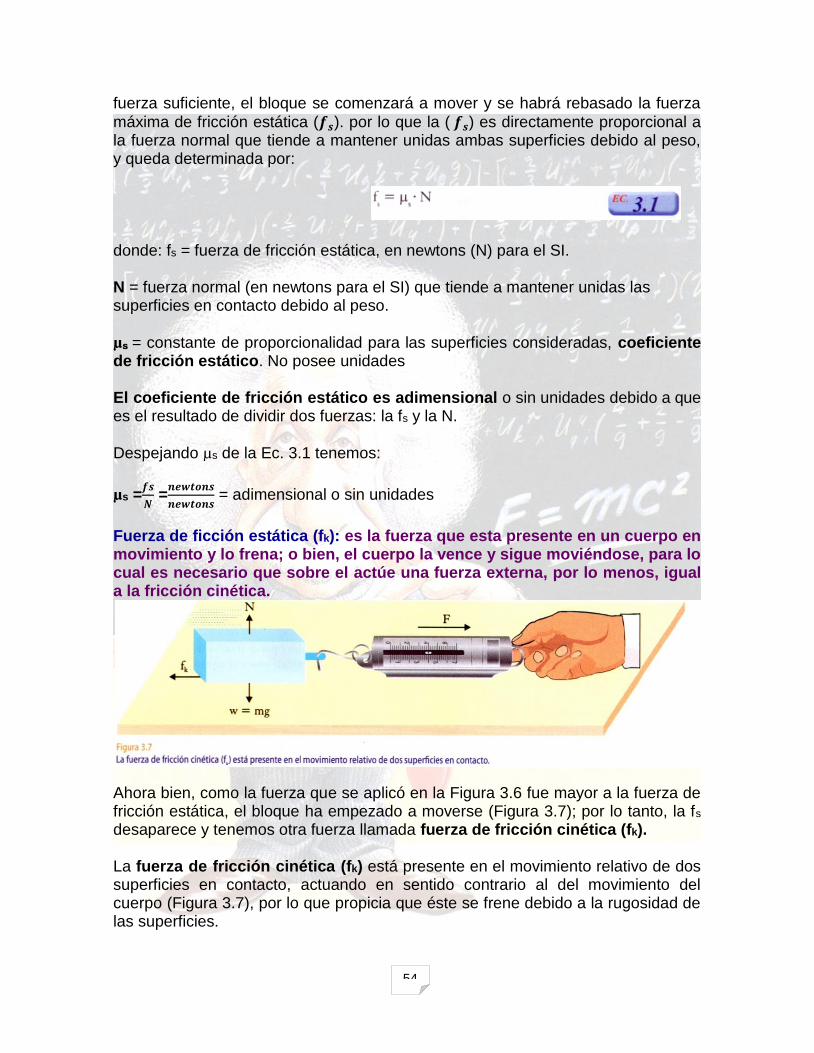
54
fuerza suficiente, el bloque se comenzará a mover y se habrá rebasado la fuerza
máxima de fricción estática (𝒇𝒔). por lo que la ( 𝒇𝒔) es directamente proporcional a la fuerza normal que tiende a mantener unidas ambas superficies debido al peso, y queda determinada por: donde: fs = fuerza de fricción estática, en newtons (N) para el SI. N = fuerza normal (en newtons para el SI) que tiende a mantener unidas las superficies en contacto debido al peso. µs = constante de proporcionalidad para las superficies consideradas, coeficiente de fricción estático. No posee unidades El coeficiente de fricción estático es adimensional o sin unidades debido a que es el resultado de dividir dos fuerzas: la fs y la N. Despejando µs de la Ec. 3.1 tenemos:
µs =𝒇𝒔
𝑵 =
𝒏𝒆𝒘𝒕𝒐𝒏𝒔
𝒏𝒆𝒘𝒕𝒐𝒏𝒔 = adimensional o sin unidades
Fuerza de ficción estática (fk): es la fuerza que esta presente en un cuerpo en movimiento y lo frena; o bien, el cuerpo la vence y sigue moviéndose, para lo cual es necesario que sobre el actúe una fuerza externa, por lo menos, igual a la fricción cinética.
Ahora bien, como la fuerza que se aplicó en la Figura 3.6 fue mayor a la fuerza de fricción estática, el bloque ha empezado a moverse (Figura 3.7); por lo tanto, la fs desaparece y tenemos otra fuerza llamada fuerza de fricción cinética (fk). La fuerza de fricción cinética (fk) está presente en el movimiento relativo de dos superficies en contacto, actuando en sentido contrario al del movimiento del cuerpo (Figura 3.7), por lo que propicia que éste se frene debido a la rugosidad de las superficies.
55
Cuando el cuerpo sigue en movimiento la fuerza de rozamiento disminuye, lo que indica que la fuerza (F) externa aplicada vence a la fuerza de fricción cinética (fk); así, con el bloque en movimiento F es mayor que fk: F> fk. Por lo tanto, la fk para unas superficies determinadas es proporcional a la fuerza normal (N) entre ellas; el factor de proporcionalidad es el coeficiente de fricción cinético (µk).
El coeficiente de fricción cinético es adimensional o sin unidades debido a que es el resultado de dividir dos fuerzas: la fuerza de fricción cinética y la fuerza normal. Despejando µk de la Ecuación 3.2 tenemos:
µk =𝑓𝑘
𝑁 =
𝑛𝑒𝑤𝑡𝑜𝑛𝑠
𝑛𝑒𝑤𝑡𝑜𝑛𝑠 = adimensional o sin unidades
Por otra parte, cabe mencionar que en la Figura 3.7 la fuerza normal sobre un cuerpo que resbala sobre una superficie horizontal es igual al peso del cuerpo; es decir:
N = w = mg Por lo tanto, la única diferencia que hay entre estos dos tipos de fricción (f) de rozamiento es que existe un coeficiente de fricción (µ) diferente para cada una y se representa por la letra griega «mu» minúscula: Por lo tanto, la única diferencia que hay entre estos dos tipos de fricción (f) de rozamiento es que existe un coeficiente de fricción (µ) diferente para cada una y se representa por la letra griega «mu» minúscula: µs = coeficiente de fricción estático µk = coeficiente de fricción cinético siempre se cumple que: µs > µk Esto quiere decir que la fricción estática es siempre mayor que la fricción cinética;
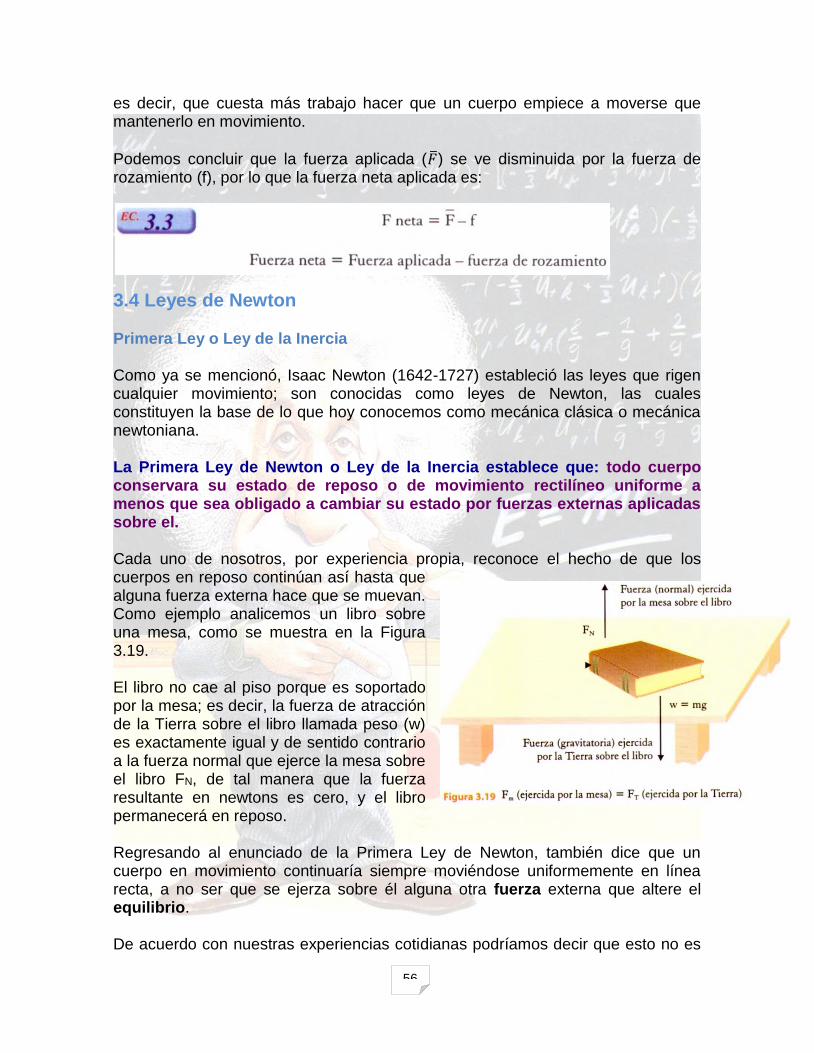
56
es decir, que cuesta más trabajo hacer que un cuerpo empiece a moverse que mantenerlo en movimiento.
Podemos concluir que la fuerza aplicada (�̅�) se ve disminuida por la fuerza de rozamiento (f), por lo que la fuerza neta aplicada es:
3.4 Leyes de Newton Primera Ley o Ley de la Inercia Como ya se mencionó, Isaac Newton (1642-1727) estableció las leyes que rigen cualquier movimiento; son conocidas como leyes de Newton, las cuales constituyen la base de lo que hoy conocemos como mecánica clásica o mecánica newtoniana. La Primera Ley de Newton o Ley de la Inercia establece que: todo cuerpo conservara su estado de reposo o de movimiento rectilíneo uniforme a menos que sea obligado a cambiar su estado por fuerzas externas aplicadas sobre el. Cada uno de nosotros, por experiencia propia, reconoce el hecho de que los cuerpos en reposo continúan así hasta que alguna fuerza externa hace que se muevan. Como ejemplo analicemos un libro sobre una mesa, como se muestra en la Figura 3.19. El libro no cae al piso porque es soportado por la mesa; es decir, la fuerza de atracción de la Tierra sobre el libro llamada peso (w) es exactamente igual y de sentido contrario a la fuerza normal que ejerce la mesa sobre el libro FN, de tal manera que la fuerza resultante en newtons es cero, y el libro permanecerá en reposo. Regresando al enunciado de la Primera Ley de Newton, también dice que un cuerpo en movimiento continuaría siempre moviéndose uniformemente en línea recta, a no ser que se ejerza sobre él alguna otra fuerza externa que altere el equilibrio. De acuerdo con nuestras experiencias cotidianas podríamos decir que esto no es
57
cierto, ya que nada continúa moviéndose siempre sin cambiar; por ejemplo, un carro de supermercado al que damos un empujón, una pelota rodando, el mismo libro de la figura anterior al empujarlo deslizándose sobre la mesa, etc., van disminuyendo su velocidad hasta detenerse. Sin embargo, sobre cada uno de estos cuerpos está actuando una fuerza externa que tiende a oponerse a su movimiento; ésta es la fuerza de fricción o rozamiento. Por lo tanto, no se contradice la Primera Ley de Newton. Aunque hasta ahora no se haya alcanzado un ejemplo de perfecto movimiento perpetuo, nuestra experiencia nos induce a dar como válida esta ley. Ahora bien, como ya se analizó, de acuerdo con el enunciado de la Primera Ley de Newton, hacen falta fuerzas para cambiar el estado «natural» de un cuerpo, que es el de reposo o el de movimiento rectilíneo uniforme. Por eso a esta primera ley se le conoce también como Ley de la Inercia; la inercia es la tendencia de un cuerpo a seguir como está. Si vas en un camión y éste frena, tú tiendes a irte para adelante, a seguir el movimiento que llevabas; no hay una fuerza que te empuje hacia el frente, sino que el camión frenó y tú re seguiste. De la misma manera, cuando el camión acelera tú te vas hacia atrás, porque tu tendencia es seguir como estabas. También, si el camión da vuelta a la derecha, tu cuerpo se va hacia la izquierda; nadie te está empujando, es tu tendencia a seguir en línea recta la que provoca que te vayas hacia el lado izquierdo del camión. Segunda Ley o Ley de la Masa Como se mencionó anteriormente, la fuerza es la causante del movimiento y del cambio de velocidad de los cuerpos; este cambio de velocidad, llamado aceleración, varía en forma directa con la fuerza aplicada y en forma inversa con la masa del cuerpo. Por lo que la Segunda Ley de Newton establece que: cuando a un cuerpo de
masa (m) se le aplica una fuerza �̅� suficiente para que se mueva, esta le
provocara una aceleración �̅� con la misma dirección y sentido que ella, y con
una magnitud directamente proporcional a dicha fuerza �̅� e inversamente proporcional a la masa (m) del cuerpo.

58
Como formula se tiene:
De la cual comprobamos que entre mayor sea el tiempo de aplicación de la fuerza, mayor será el cambio de velocidad del cuerpo (relación directa). Diferencia entre masa (m) y peso (w) y sus unidades de medida La masa (m) es una magnitud escalar que representa la cantidad de materia que tiene un cuerpo. De acuerdo con la Segunda Ley de Newton, la masa (m) de un cuerpo es una medida de cuanto se resiste el cuerpo a ser acelerado cuando se le aplica una fuerza. Despejando la masa (m) de la Ecuación 3.5, tenemos:
Un cuerpo con poca masa (m) es fácil de acelerar; mientras que uno con gran masa se resiste más a cambiar su velocidad. Cuando a un cuerpo se le aplican diferentes fuerzas experimenta distintas aceleraciones y se cumple que la fuerza (F) producida es directamente proporcional a la aceleración (a). La constante de proporcionalidad es la masa (m). Todo lo anterior puede expresarse diciendo que la masa es la medida cuantitativa de la inercia. Por esto, a la masa así definida se le conoce como masa inercial (Segunda Ley de Newton o Ley de la Masa). Las unidades fundamentales para la masa se obtienen sustituyendo en la Ecua-ción 3.8 las unidades correspondientes de fuerza y aceleración. En el Sistema Internacional de Unidades (SI) tenemos:
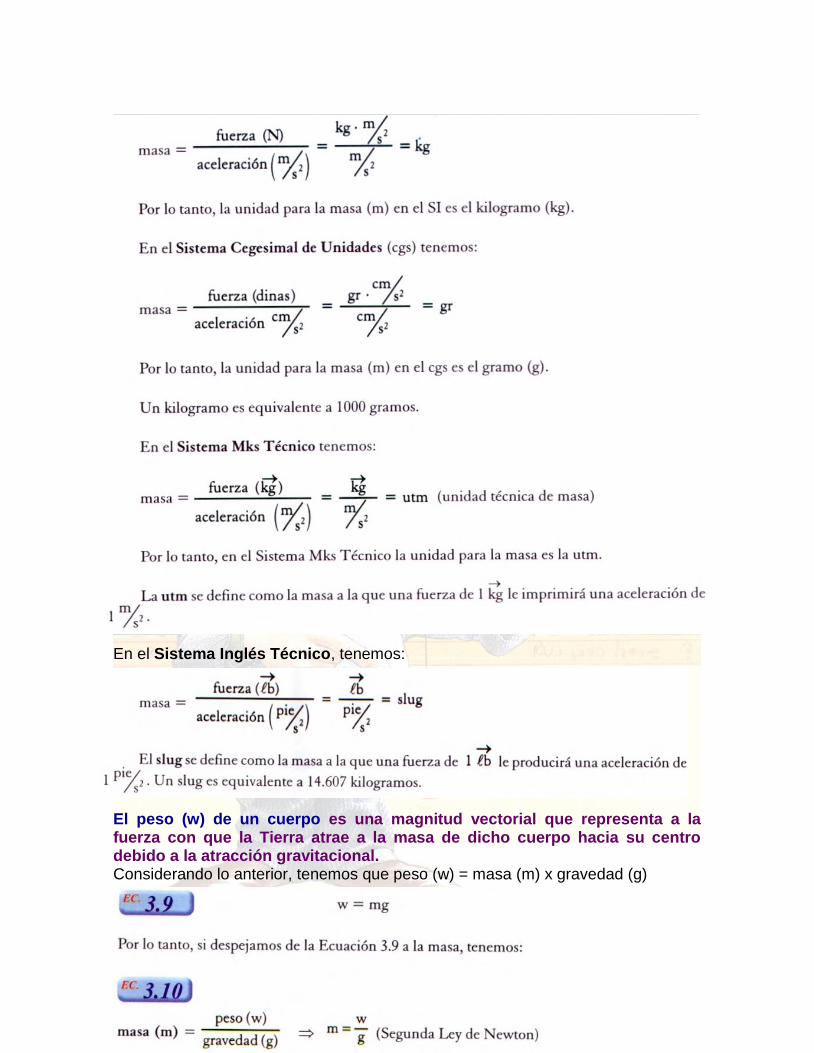
59
En el Sistema Inglés Técnico, tenemos:
El peso (w) de un cuerpo es una magnitud vectorial que representa a la fuerza con que la Tierra atrae a la masa de dicho cuerpo hacia su centro debido a la atracción gravitacional. Considerando lo anterior, tenemos que peso (w) = masa (m) x gravedad (g)
60
Sustituyendo en la Ecuación 3.5 la ecuación 3.10, puedes escribir la ecuación matemática para la Segunda Ley de Newton de la forma siguiente:
Las unidades para la masa (m) y el peso (w), en el Sistema Internacional (SI), se obtienen de la siguiente forma:
Por lo tanto, la unidad para la masa (m) en el SI es el kilogramo. En el Sistema cgs las unidades para la masa (m) son os gramos, y para el peso (w), la dina. En el Sistema Ingles las unidades para la masa (m) son el slug, y para el peso (w), la libra fuerza (ℓbf). Estado de ingravidez (imponderabilidad) Hemos oído decir que los objetos en una nave espacial carecen de peso cuando ésta vuela en órbita en torno a la Tierra. Este concepto de imponderabilidad o ingravidez lo aplicaremos para analizar el peso de un hombre en un elevador, como se muestra en la Figura 3.20.
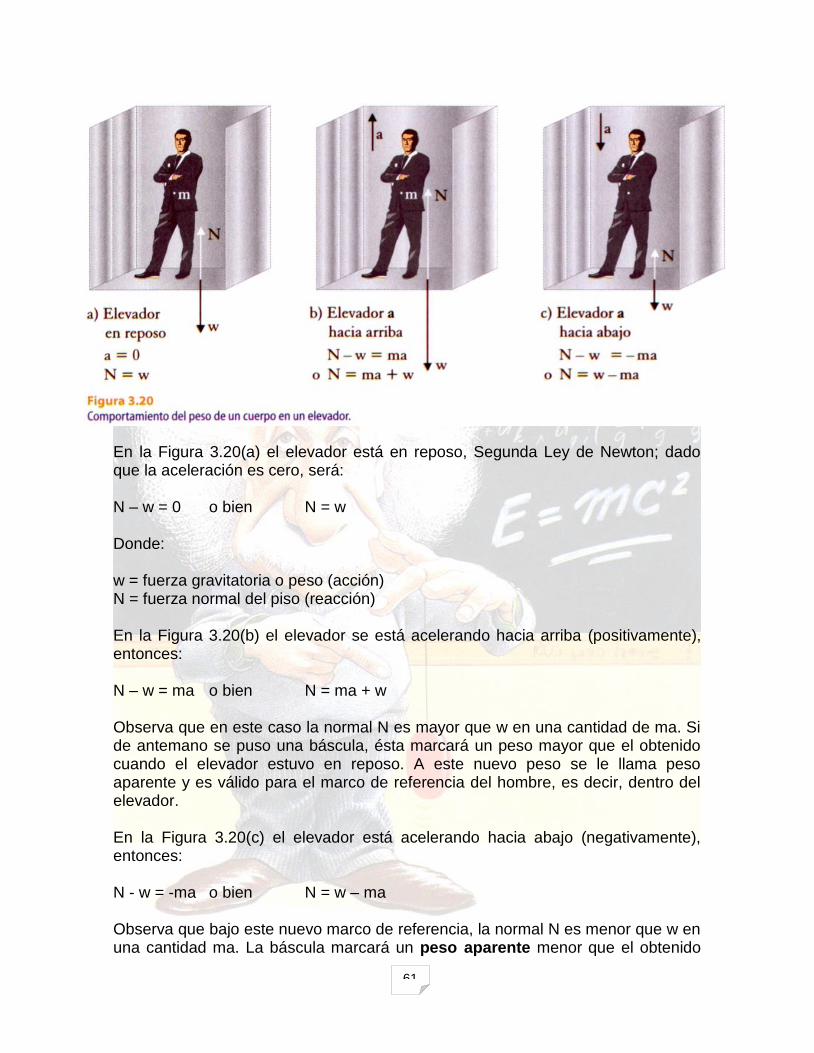
61
En la Figura 3.20(a) el elevador está en reposo, Segunda Ley de Newton; dado que la aceleración es cero, será: N – w = 0 o bien N = w Donde: w = fuerza gravitatoria o peso (acción) N = fuerza normal del piso (reacción) En la Figura 3.20(b) el elevador se está acelerando hacia arriba (positivamente), entonces: N – w = ma o bien N = ma + w Observa que en este caso la normal N es mayor que w en una cantidad de ma. Si de antemano se puso una báscula, ésta marcará un peso mayor que el obtenido cuando el elevador estuvo en reposo. A este nuevo peso se le llama peso aparente y es válido para el marco de referencia del hombre, es decir, dentro del elevador. En la Figura 3.20(c) el elevador está acelerando hacia abajo (negativamente), entonces: N - w = -ma o bien N = w – ma Observa que bajo este nuevo marco de referencia, la normal N es menor que w en una cantidad ma. La báscula marcará un peso aparente menor que el obtenido
62
cuando el elevador estuvo en reposo. Ahora, con la finalidad de llegara¡ objetivo de esta sección, supongamos que los cables del elevador se rompen, de tal manera que cae libremente (caída libre) con una aceleración a = -g, entonces:
N = w – mg = mg - mg N = 0 En este caso, ni el pasajero ni el piso ejercerían fuerzas entre sí. Y si el pasajero no pierde la paciencia, puede darse tiempo de comprobar que la báscula marca que su peso aparente es cero, desde su nuevo marco de referencia. Con frecuencia se hace referencia a esta situación con el concepto de ingravidez o imponderabilidad. Debe considerarse que el peso del pasajero, es decir, la fuerza de atracción ejercida sobre él por la Tierra, no ha cambiado, pero la fuerza que ejerce sobre el piso y la fuerza de reacción de éste sobre aquél son iguales a cero. Tercera Ley o Ley de la Acción y la Reacción Las fuerzas que actúan sobre un cuerpo son producidas, ya sea por contacto o a distancia, por otros cuerpos. La Tercera Ley de Newton afirma que cuando un cuerpo ejerce una fuerza sobre otro, éste ejerce también una fuerza sobre el primero. La fuerza que ejerce el primer cuerpo sobre el segundo debe tener la misma magnitud de la fuerza que el segundo cuerpo ejerce sobre el primero, pero con sentido opuesto. Tercera Ley Newton: a toda fuerza de acción se opone una fuerza de reacción de igual magnitud y dirección, pero en sentido contrario. Por ejemplo, en una pista de patinaje sobre hielo, como se muestra en la Ilustra-ción 3.6, al empujar suavemente un adulto a una niña, no sólo existe la fuerza que el adulto ejerce sobre la niña, sino que la niña ejerce una fuerza igual pero en sentido opuesto sobre el adulto. Sin embargo, como la masa del adulto es mayor, para conservar la cantidad de movimiento, su aceleración será menor. En un sistema aislado sobre el cual no actúan fuerzas externas, la cantidad de movimiento debe ser constante. En el ejemplo del adulto y la niña en la pista de patinaje, sus velocidades iniciales son cero. Durante la interacción adulto-niña operan fuerzas internas, e idealizando que la suma de las fuerzas externas son nulas, la cantidad de movimiento del sistema tiene que seguir siendo igual. Después de que el adulto empuja a la niña, el producto de la masa grande por la velocidad pequeña del adulto es igual al de la masa pequeña y la velocidad grande de la niña, pero de sentido opuesto, por lo que la suma es cero. Matemáticamente:
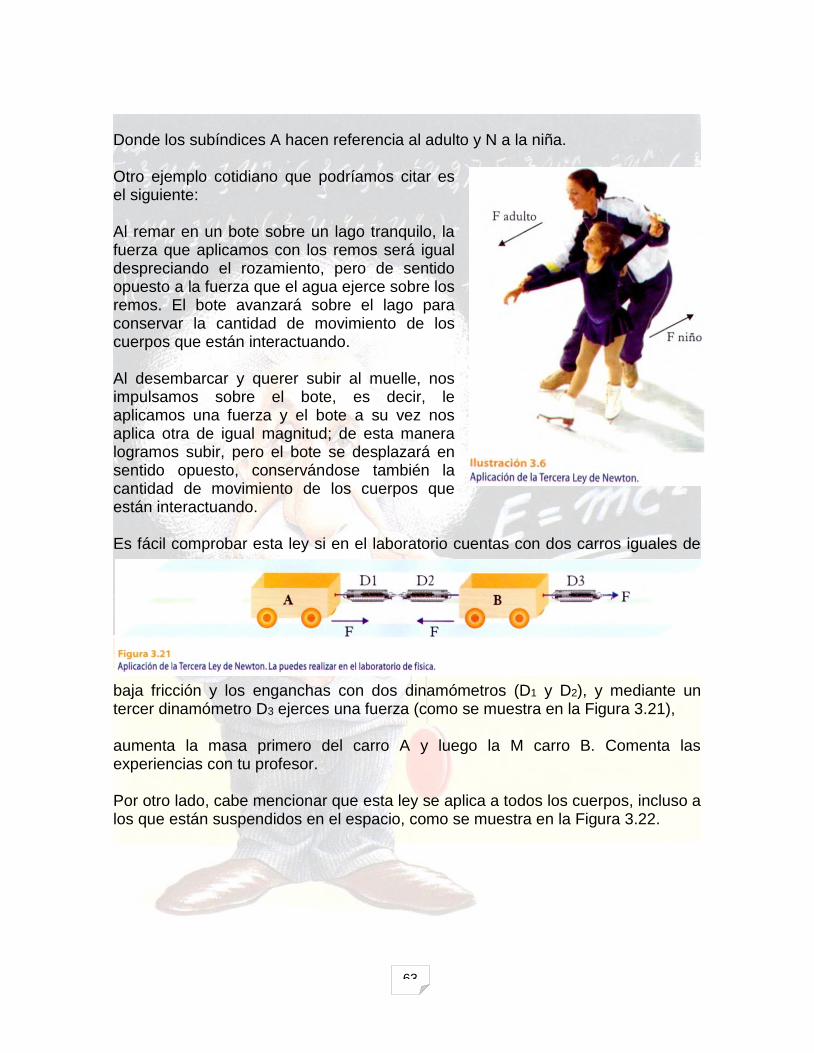
63
Donde los subíndices A hacen referencia al adulto y N a la niña. Otro ejemplo cotidiano que podríamos citar es el siguiente: Al remar en un bote sobre un lago tranquilo, la fuerza que aplicamos con los remos será igual despreciando el rozamiento, pero de sentido opuesto a la fuerza que el agua ejerce sobre los remos. El bote avanzará sobre el lago para conservar la cantidad de movimiento de los cuerpos que están interactuando. Al desembarcar y querer subir al muelle, nos impulsamos sobre el bote, es decir, le aplicamos una fuerza y el bote a su vez nos aplica otra de igual magnitud; de esta manera logramos subir, pero el bote se desplazará en sentido opuesto, conservándose también la cantidad de movimiento de los cuerpos que están interactuando. Es fácil comprobar esta ley si en el laboratorio cuentas con dos carros iguales de
baja fricción y los enganchas con dos dinamómetros (D1 y D2), y mediante un tercer dinamómetro D3 ejerces una fuerza (como se muestra en la Figura 3.21), aumenta la masa primero del carro A y luego la M carro B. Comenta las experiencias con tu profesor. Por otro lado, cabe mencionar que esta ley se aplica a todos los cuerpos, incluso a los que están suspendidos en el espacio, como se muestra en la Figura 3.22.
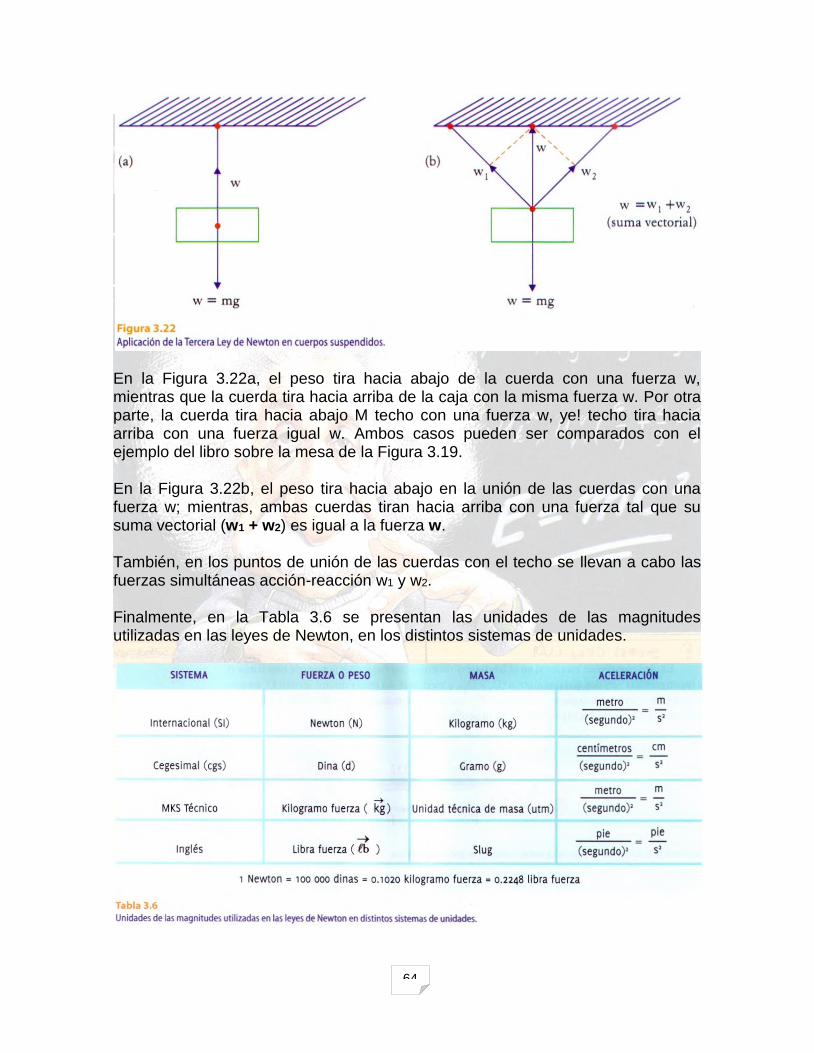
64
En la Figura 3.22a, el peso tira hacia abajo de la cuerda con una fuerza w, mientras que la cuerda tira hacia arriba de la caja con la misma fuerza w. Por otra parte, la cuerda tira hacia abajo M techo con una fuerza w, ye! techo tira hacia arriba con una fuerza igual w. Ambos casos pueden ser comparados con el ejemplo del libro sobre la mesa de la Figura 3.19. En la Figura 3.22b, el peso tira hacia abajo en la unión de las cuerdas con una fuerza w; mientras, ambas cuerdas tiran hacia arriba con una fuerza tal que su suma vectorial (w1 + w2) es igual a la fuerza w. También, en los puntos de unión de las cuerdas con el techo se llevan a cabo las fuerzas simultáneas acción-reacción w1 y w2. Finalmente, en la Tabla 3.6 se presentan las unidades de las magnitudes utilizadas en las leyes de Newton, en los distintos sistemas de unidades.
65
3.5 Ley de la Gravitación Universal de Newton
Newton, apoyándose en la tres leyes anteriormente enunciadas, demostró la naturaleza de las fuerzas externas en el movimiento planetario. Resultaba evidente que para que los planetas guardaran equilibrio y se moviesen periódicamente en órbitas casi circulares debía existir alguna fuerza desviándolos de su trayectoria rectilínea, pero manteniéndolos en una trayectoria definida (Ilustración 3.8). Newton concluyo que los planetas experimentan una fuerza dirigida hacia el
Sol denominada fuerza centrípeta, la cual hace que éstos mantengan una trayectoria casi circular definida. De la misma manera, hizo referencia a cómo la Luna gira alrededor de la Tierra, y cómo otras lunas giran alrededor de otros planetas, y ¡oh, sorpresa!, esta ley es también válida para cuerpos sobre la superficie de la Tierra y se llama comúnmente fuerza de atracción gravitacional, incluso para cuerpos por encima de la superficie de la Tierra, por toque la fuerza de la gravedad, que es una de las fuerzas fundamentales de la naturaleza, es la responsable del peso de los cuerpos. Por consiguiente, esta fuerza de atracción, ya que se ejerce mutuamente como acción y reacción (Tercera Ley) se convierte en un fenómeno universal significando, con ello que afecta a todos los cuerpos por igual. Al continuar sus investigaciones, demostró que dicha fuerza de atracción que se ejerce entre dos cuerpos, conocida como campo gravitatorio, universalmente es:
a) directamente proporcional al producto de las masas de los cuerpos (M, m) b) inversamente proporcional al cuadrado de la distancia d que los separa.
La expresión matemática que define lo anterior es: Ley de la Gravitación Universal de Newton: dos cuerpos se atraen con una fuerza directamente proporcional al producto de sus masas e inversamente proporcional al cuadrado de la distancia que los espera. Alrededor de un siglo después (1798), Henry Cavendish, mediante métodos experimentales, logró convertir la expresión anterior en igualdad, introduciendo la constante de gravitación universal G, de tal manera que actualmente la Ley

66
Gravitacional de Newton se expresa matemáticamente como:
Donde:
El valor sumamente pequeño de esta constante universal indica que la fuerza de gravitación es muy débil, a no ser que alguna de las masas presentes en la atracción sea muy grande. Dentro de la infinidad de aplicaciones en nuestro mundo moderno de esta ley, es apropiado saber que gracias a ella podemos calcular la masa del Sol y de los planetas, incluyendo el nuestro, como se verá en el siguiente subtema.
3.8 Leyes de Kepler Johannes Kepler, como astrónomo y matemático, es una figura clave en la revolución científica alemana. Nació en diciembre de 1571 y falleció en 1630. Sus tres leyes están enfocadas al movimiento de los planetas en sus órbitas alrededor del Sol. Inicialmente supuso una trayectoria circular perfecta de la orbita, pero los datos observados impedían un correcto ajuste que le resultaba en un error de ocho minutos de arco, por lo que tuvo que cambiar su consideración a una trayectoria elíptica, utilizando la fórmula de la elipse desarrollada por Apolonio de Pérgamo, enunciando así sus tres leyes. La Primera Ley de Kepler establece que todos los planetas se desplazan alrededor del Sol describiendo órbitas elípticas, estando el Sol situado en uno de los focos (Figura 3.26). La Segunda Ley de Kepler establece que el radio vector que une el planeta y el Sol barre áreas iguales en tiempos iguales (Figura 3.27). La Tercera Ley de Kepler establece que para cualquier planeta el cuadrado de su periodo orbital es directamente proporcional al cubo de la distancia media con el
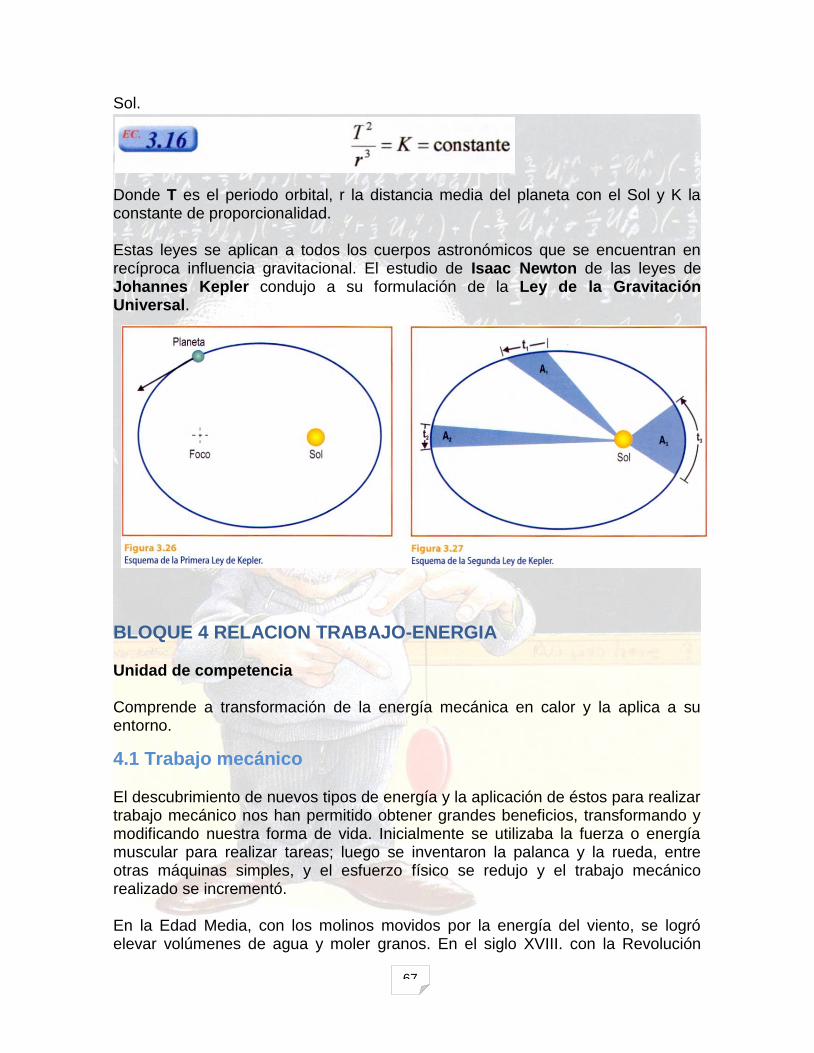
67
Sol.
Donde T es el periodo orbital, r la distancia media del planeta con el Sol y K la constante de proporcionalidad. Estas leyes se aplican a todos los cuerpos astronómicos que se encuentran en recíproca influencia gravitacional. El estudio de Isaac Newton de las leyes de Johannes Kepler condujo a su formulación de la Ley de la Gravitación Universal.
BLOQUE 4 RELACION TRABAJO-ENERGIA Unidad de competencia Comprende a transformación de la energía mecánica en calor y la aplica a su entorno.
4.1 Trabajo mecánico El descubrimiento de nuevos tipos de energía y la aplicación de éstos para realizar trabajo mecánico nos han permitido obtener grandes beneficios, transformando y modificando nuestra forma de vida. Inicialmente se utilizaba la fuerza o energía muscular para realizar tareas; luego se inventaron la palanca y la rueda, entre otras máquinas simples, y el esfuerzo físico se redujo y el trabajo mecánico realizado se incrementó. En la Edad Media, con los molinos movidos por la energía del viento, se logró elevar volúmenes de agua y moler granos. En el siglo XVIII. con la Revolución
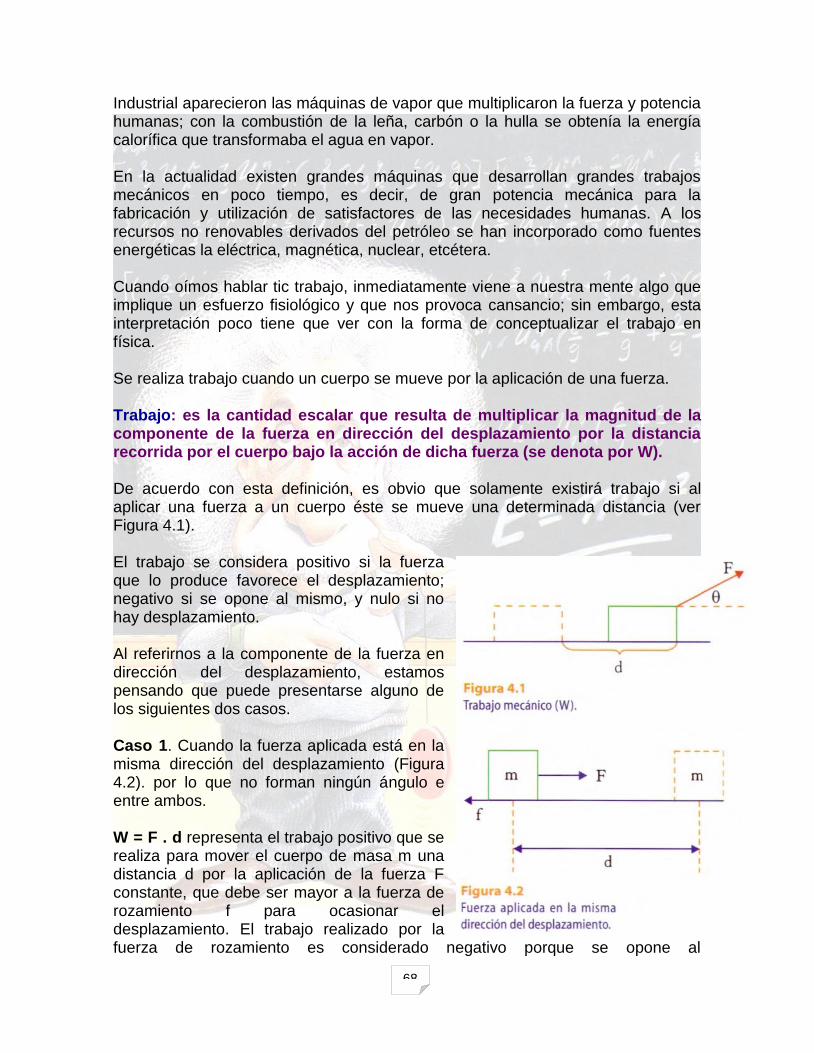
68
Industrial aparecieron las máquinas de vapor que multiplicaron la fuerza y potencia humanas; con la combustión de la leña, carbón o la hulla se obtenía la energía calorífica que transformaba el agua en vapor. En la actualidad existen grandes máquinas que desarrollan grandes trabajos mecánicos en poco tiempo, es decir, de gran potencia mecánica para la fabricación y utilización de satisfactores de las necesidades humanas. A los recursos no renovables derivados del petróleo se han incorporado como fuentes energéticas la eléctrica, magnética, nuclear, etcétera. Cuando oímos hablar tic trabajo, inmediatamente viene a nuestra mente algo que implique un esfuerzo fisiológico y que nos provoca cansancio; sin embargo, esta interpretación poco tiene que ver con la forma de conceptualizar el trabajo en física. Se realiza trabajo cuando un cuerpo se mueve por la aplicación de una fuerza. Trabajo: es la cantidad escalar que resulta de multiplicar la magnitud de la componente de la fuerza en dirección del desplazamiento por la distancia recorrida por el cuerpo bajo la acción de dicha fuerza (se denota por W). De acuerdo con esta definición, es obvio que solamente existirá trabajo si al aplicar una fuerza a un cuerpo éste se mueve una determinada distancia (ver Figura 4.1). El trabajo se considera positivo si la fuerza que lo produce favorece el desplazamiento; negativo si se opone al mismo, y nulo si no hay desplazamiento. Al referirnos a la componente de la fuerza en dirección del desplazamiento, estamos pensando que puede presentarse alguno de los siguientes dos casos. Caso 1. Cuando la fuerza aplicada está en la misma dirección del desplazamiento (Figura 4.2). por lo que no forman ningún ángulo e entre ambos. W = F . d representa el trabajo positivo que se realiza para mover el cuerpo de masa m una distancia d por la aplicación de la fuerza F constante, que debe ser mayor a la fuerza de rozamiento f para ocasionar el desplazamiento. El trabajo realizado por la fuerza de rozamiento es considerado negativo porque se opone al
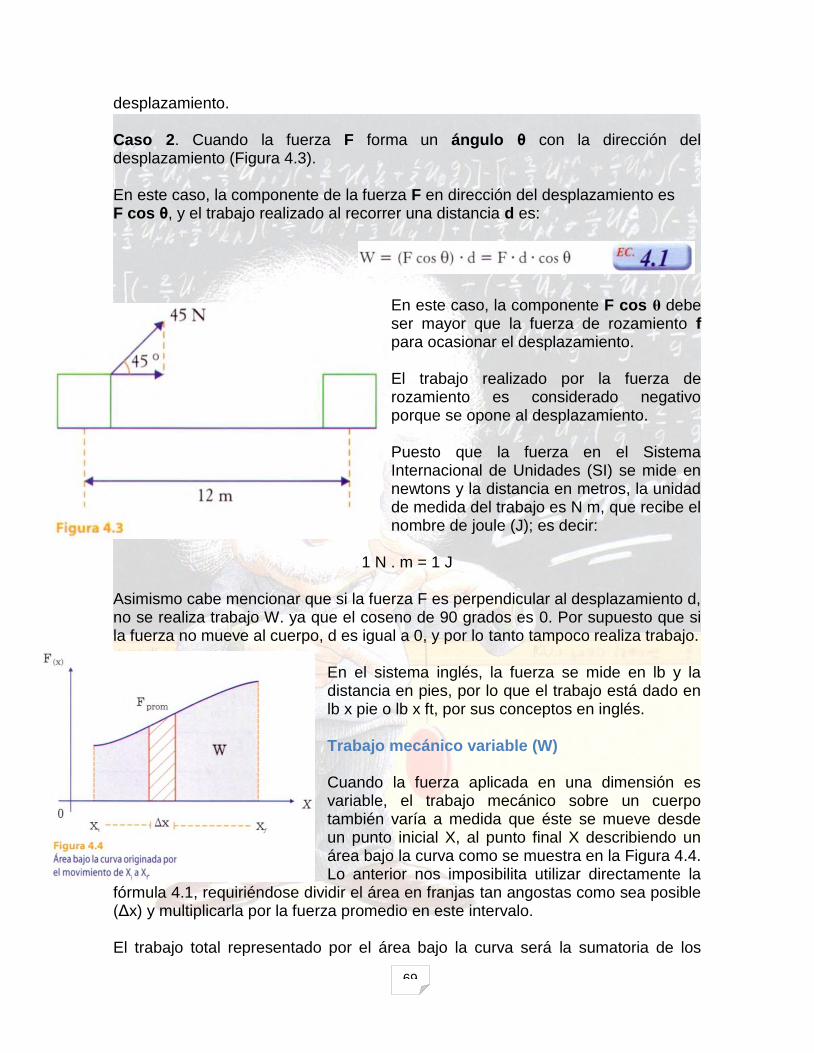
69
desplazamiento. Caso 2. Cuando la fuerza F forma un ángulo θ con la dirección del desplazamiento (Figura 4.3). En este caso, la componente de la fuerza F en dirección del desplazamiento es F cos θ, y el trabajo realizado al recorrer una distancia d es:
En este caso, la componente F cos θ debe ser mayor que la fuerza de rozamiento f para ocasionar el desplazamiento. El trabajo realizado por la fuerza de rozamiento es considerado negativo porque se opone al desplazamiento. Puesto que la fuerza en el Sistema Internacional de Unidades (SI) se mide en newtons y la distancia en metros, la unidad de medida del trabajo es N m, que recibe el nombre de joule (J); es decir:
1 N . m = 1 J Asimismo cabe mencionar que si la fuerza F es perpendicular al desplazamiento d, no se realiza trabajo W. ya que el coseno de 90 grados es 0. Por supuesto que si la fuerza no mueve al cuerpo, d es igual a 0, y por lo tanto tampoco realiza trabajo.
En el sistema inglés, la fuerza se mide en lb y la distancia en pies, por lo que el trabajo está dado en lb x pie o lb x ft, por sus conceptos en inglés. Trabajo mecánico variable (W) Cuando la fuerza aplicada en una dimensión es variable, el trabajo mecánico sobre un cuerpo también varía a medida que éste se mueve desde un punto inicial X, al punto final X describiendo un área bajo la curva como se muestra en la Figura 4.4. Lo anterior nos imposibilita utilizar directamente la
fórmula 4.1, requiriéndose dividir el área en franjas tan angostas como sea posible (Δx) y multiplicarla por la fuerza promedio en este intervalo. El trabajo total representado por el área bajo la curva será la sumatoria de los
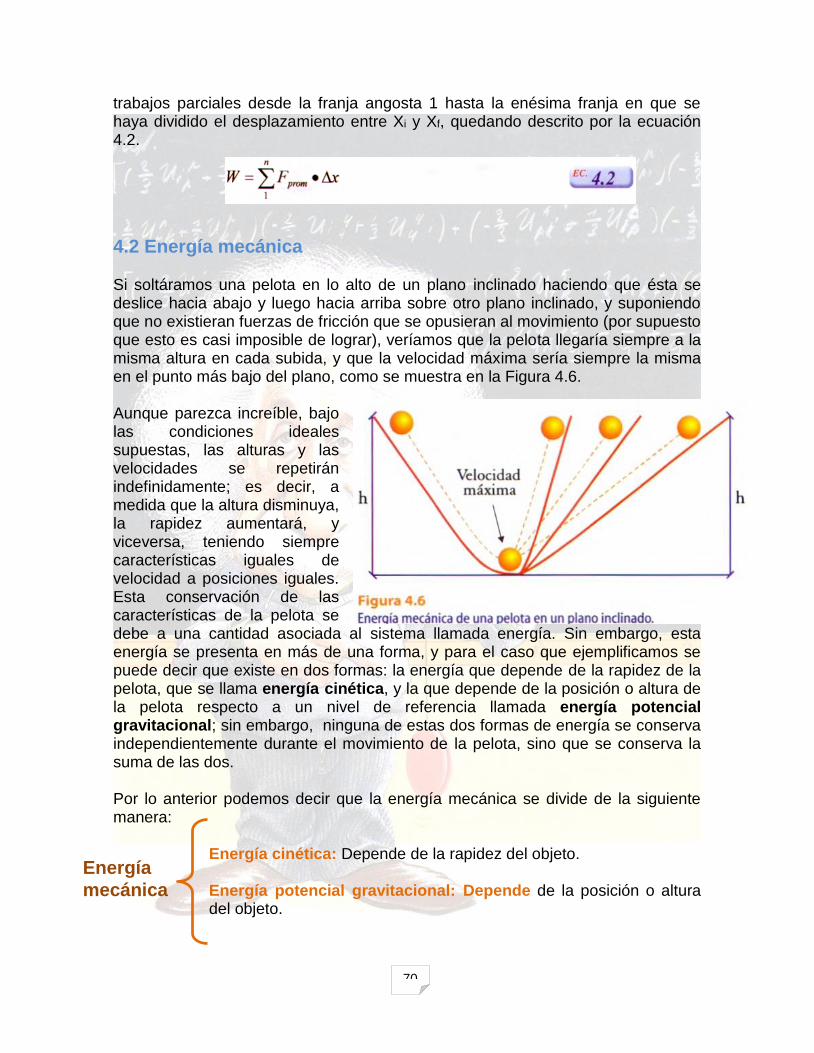
70
trabajos parciales desde la franja angosta 1 hasta la enésima franja en que se haya dividido el desplazamiento entre Xi y Xf, quedando descrito por la ecuación 4.2.
4.2 Energía mecánica Si soltáramos una pelota en lo alto de un plano inclinado haciendo que ésta se deslice hacia abajo y luego hacia arriba sobre otro plano inclinado, y suponiendo que no existieran fuerzas de fricción que se opusieran al movimiento (por supuesto que esto es casi imposible de lograr), veríamos que la pelota llegaría siempre a la misma altura en cada subida, y que la velocidad máxima sería siempre la misma en el punto más bajo del plano, como se muestra en la Figura 4.6. Aunque parezca increíble, bajo las condiciones ideales supuestas, las alturas y las velocidades se repetirán indefinidamente; es decir, a medida que la altura disminuya, la rapidez aumentará, y viceversa, teniendo siempre características iguales de velocidad a posiciones iguales. Esta conservación de las características de la pelota se debe a una cantidad asociada al sistema llamada energía. Sin embargo, esta energía se presenta en más de una forma, y para el caso que ejemplificamos se puede decir que existe en dos formas: la energía que depende de la rapidez de la pelota, que se llama energía cinética, y la que depende de la posición o altura de la pelota respecto a un nivel de referencia llamada energía potencial gravitacional; sin embargo, ninguna de estas dos formas de energía se conserva independientemente durante el movimiento de la pelota, sino que se conserva la suma de las dos. Por lo anterior podemos decir que la energía mecánica se divide de la siguiente manera:
Energía cinética: Depende de la rapidez del objeto.
Energía potencial gravitacional: Depende de la posición o altura del objeto.
Energía
mecánica
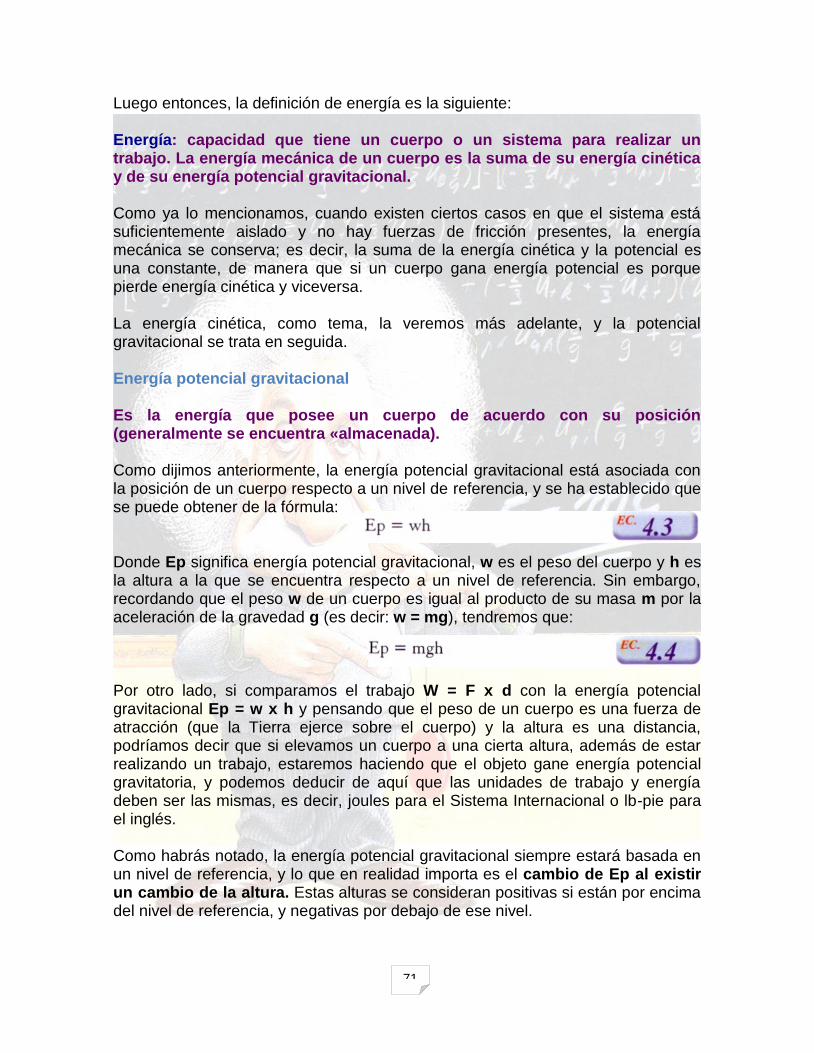
71
Luego entonces, la definición de energía es la siguiente: Energía: capacidad que tiene un cuerpo o un sistema para realizar un trabajo. La energía mecánica de un cuerpo es la suma de su energía cinética y de su energía potencial gravitacional. Como ya lo mencionamos, cuando existen ciertos casos en que el sistema está suficientemente aislado y no hay fuerzas de fricción presentes, la energía mecánica se conserva; es decir, la suma de la energía cinética y la potencial es una constante, de manera que si un cuerpo gana energía potencial es porque pierde energía cinética y viceversa. La energía cinética, como tema, la veremos más adelante, y la potencial gravitacional se trata en seguida. Energía potencial gravitacional Es la energía que posee un cuerpo de acuerdo con su posición (generalmente se encuentra «almacenada). Como dijimos anteriormente, la energía potencial gravitacional está asociada con la posición de un cuerpo respecto a un nivel de referencia, y se ha establecido que se puede obtener de la fórmula: Donde Ep significa energía potencial gravitacional, w es el peso del cuerpo y h es la altura a la que se encuentra respecto a un nivel de referencia. Sin embargo, recordando que el peso w de un cuerpo es igual al producto de su masa m por la aceleración de la gravedad g (es decir: w = mg), tendremos que: Por otro lado, si comparamos el trabajo W = F x d con la energía potencial gravitacional Ep = w x h y pensando que el peso de un cuerpo es una fuerza de atracción (que la Tierra ejerce sobre el cuerpo) y la altura es una distancia, podríamos decir que si elevamos un cuerpo a una cierta altura, además de estar realizando un trabajo, estaremos haciendo que el objeto gane energía potencial gravitatoria, y podemos deducir de aquí que las unidades de trabajo y energía deben ser las mismas, es decir, joules para el Sistema Internacional o lb-pie para el inglés. Como habrás notado, la energía potencial gravitacional siempre estará basada en un nivel de referencia, y lo que en realidad importa es el cambio de Ep al existir un cambio de la altura. Estas alturas se consideran positivas si están por encima del nivel de referencia, y negativas por debajo de ese nivel.
72
Energía cinética La forma de energía asociada con el movimiento de un cuerpo se llanta energía cinética y se puede definir como sigue: Energía cinética: es la capacidad que tiene un sistema de realizar un trabajo en virtud de su velocidad. Se ha demostrado que un objeto de masa m en movimiento con una velocidad y tiene una energía cinética: Como mencionamos anteriormente, lo que se conserva en algunos sistemas es la energía mecánica es decir, la suma de energía cinética y potencial. Así, en el caso de la pelota que se desliza hacia abajo de un plano inclinado y hacia arriba de otro y regresa realizando una y otra vez estos movimientos, cuando la pelota se encuentra en lo más alto y su velocidad es igual a cero, la única energía que posee es la energía potencial; mientras que en la parte más baja donde la velocidad es máxima y la altura es cero, sólo tendrá energía cinética. En la parte intermedia de estos movimientos lo que permanecerá constante será la energía total; es decir, una parte será de energía potencial y otra de energía cinética, pero la suma de ambas siempre será la misma. Un teorema muy importante es el que nos relaciona el trabajo con la energía. Teorema del trabajo y la energía: el trabajo efectuado por la fuerza neta constante al desplazarse una partícula es igual al cambio en la energía cinética de la partícula: W=ΔEc
Cuando un cuerpo se mueve tiene energía cinética, y como el movimiento puede ser de traslación o de rotación, la energía cinética toma también estos nombres. Es decir, si un cuerpo tiene un movimiento de traslación tendrá también energía cinética traslacional; mientras que si el movimiento del cuerpo es de rotación tendrá energía cinética rotacional (ECr); aun así, la manera de obtener energía cinética rotacional no varía y, por lo tanto: Donde v es la velocidad tangencial del cuerpo. Si quisiéramos obtener la ECr, conociendo su velocidad angular ω, recordemos que v = ωr, donde r es el radio de giro del cuerpo, tendríamos:

73
Ley de la Conservación de la Energía Aunque implícitamente hemos estado hablando sobre la Ley de la Conservación de la Energía, aun no la hemos definido, por lo que en esta sección lo haremos y trabajaremos con algunos problemas. Ley de la Conservación de la Energía: cuando ocurren transformaciones de energía en un sistema, la suma de las energías involucradas siempre permanecerá constante sin que pueda crearse o destruirse en algún proceso. A continuación realizaremos un análisis de un cuerpo que se deja caer desde una altura h; primero sin considerar el rozamiento, como se muestra en la Figura 4.9a, y después considerándolo, como se muestra en la Figura 4.9b.
Como se puede observar, sin rozamiento la energía potencial en el punto A (EpA) se transforma completamente en energía cinética en el suelo (ECs), pasando por puntos intermedios, como el B, en el cual el cuerpo posee tanto energía potencial como cinética y la suma de ellas en cualquier punto es igual a la energía en el punto A (EA). Si consideramos el rozamiento del aire (Figura 4.9b) observamos que, debido a este, una pequeña parte de la energía en el punto A (EpA) se transforma en una perdida de energía por rozamiento (Er), provoca por el trabajo negativo (se opone al movimiento) de la fuerza de rozamiento: Er = -Wr = -frh = - µN . h. Como consecuencia la EA > ES, o que la ES = EA - Wr. A su vez, podemos deducir que la velocidad final (Vf) del cuerpo es mayor si no hay rozamiento que se
74
oponga a la caída libre del mismo. De este análisis podemos enunciar la Ley de la Conservación de la Energía Mecánica: en ausencia de resistencia del aire u otra fuerza disipativa, las sumas de las energías potenciales y cinéticas es una suma constante, siempre y cuando ningún tipo de energía sea añadido al sistema.
Energía total = Ep + Ec = constante Como se presenta esta Ley, es considerando por simplicidad que la fuerza que ocasiona el trabajo y su transformación en energía es debida a una fuerza conservativa. Una fuerza es conservativa cuando el trabajo que realiza en su desplazamiento de ida es exactamente igual al trabajo de retorno sobre la misma trayectoria, como las fuerzas gravitacional, elástica y electrostática. Así, la energía potencial, o parte de ella, se transforma en energía cinética o viceversa, pero siempre conservando que la suma de ambas energías sea constante, como se muestra en la Figura 4.9a. Sin embargo, si una partícula sobre la que actúa una o más fuerzas regresa a su posición inicial con más energía cinética o con menos de la que tenía inicialmente, resulta que en ese viaje de ida y vuelta su capacidad de producir trabajo mecánico varía. Una fuerza es no conservativa cuando el trabajo que realiza en su desplazamiento de ida no es igual al trabajo de retorno sobre la misma trayectoria. Así, parte de la energía cinética se transforma en energía interna (Eint). La fuerza de rozamiento es el típico ejemplo de una fuerza no conservativa, cuyo trabajo negativo se transforma en energía térmica o energía interna, que se disipa en forma de calor por la interacción de la partícula con el medio en que se desplaza, como se muestra en la Figura 4.9b. La ecuación entonces sería:
Energía total = Ep + Ec + Eint En ambos casos, esta Ley es un principio fundamental de la física que establece que la energía no se crea ni se destruye, únicamente se transforma de una forma a otra.
4.3 Potencia mecánica Una misma cantidad de trabajo puede realizarse en segundos, minutos, horas, días y hasta en años. Sin embargo, por lo general requerimos de eficiencia, es decir, de rapidez para efectuar el trabajo necesario. De esta manera tenemos que: Potencia: es la rapidez con que se realiza un trabajo.
75
En el Sistema Internacional (SI) el trabajo es dado en joules (J) y el tiempo en segundos (s), por lo que la potencia se da en J/s, que equivale a la unidad llamada watt (W).
1W = 1 J/s
Dado que watt (W) es una unidad demasiado pequeña, sobre todo en aplicaciones industriales, se han definido los siguientes múltiplos de ella: Kilowatt (kW): 1kW =1000W Caballo de fuerza (hp): 1 hp = 746W = 0.746kW Cuando se tenga unidad de potencia en otros sistemas se deberá emplear la Tabla A2 de conversiones directas para referirlas al SI. Si sustituimos en la ecuación anterior el valor obteniendo para el trabajo: Donde (V) es la velocidad del cuerpo sobre el que una fuerza paralela (F) es aplicada.